
運転状況解析支援装置
【課題】車両の走行位置と当該走行位置における走行速度やエンジン回転数等の車両状態との関係が直感的に把握できる運転状況解析支援装置を提供する。
【解決手段】運転状況解析支援装置は、車両の走行位置と当該走行位置を走行しているときの車両状態(走行速度及びエンジン回転数)を含む車両情報に基づいて、走行位置により特定される地図画像P上の走行道路に、当該走行道路における最高走行速度に対応して予め定められた表示色で、走行軌跡の区間である軌跡線Kを、時系列的に順次表示するので、軌跡線Kを時系列的に順次表示することで車両の走行ルートを実際に走行した順路で再現できるとともに、当該各軌跡線区間における車両状況に応じて表示色を変えることができる。
【解決手段】運転状況解析支援装置は、車両の走行位置と当該走行位置を走行しているときの車両状態(走行速度及びエンジン回転数)を含む車両情報に基づいて、走行位置により特定される地図画像P上の走行道路に、当該走行道路における最高走行速度に対応して予め定められた表示色で、走行軌跡の区間である軌跡線Kを、時系列的に順次表示するので、軌跡線Kを時系列的に順次表示することで車両の走行ルートを実際に走行した順路で再現できるとともに、当該各軌跡線区間における車両状況に応じて表示色を変えることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地図画像上に車両の走行軌跡を表示することにより運転状況の解析を支援する運転状況解析支援装置に関するものである。
【背景技術】
【0002】
例えば、タクシー、バス、トラック等の車両を用いて運送業務を行う運送業者においては、社内の各運転者に対して安全運転を促し、事故を未然に防止することが重要な課題となっている。
【0003】
そこで、各運転者が日常的に実際に安全運転を実施しているかどうかを、運送業者の社内等に配置される管理者が常時確認できるように、例えば「デジタルタコグラフ」と呼ばれる運行記録機器が実用化され利用されている。このデジタルタコグラフは、タクシー、バス、トラック等の車両毎に搭載され、一定時間(例えば0.5秒)毎に取得した走行速度やエンジン回転数等の車両状態を含む車両情報をメモリーカード等の記憶手段に自動的に記録するものである。
【0004】
そして、例えば、営業所等に設置された運転状況解析支援装置としてのパーソナルコンピュータを用いて、上記メモリーカード等に記録された車両情報等のデータを読み出して詳細に解析することにより、管理者が、その車両の走行時間、走行距離、最高速度、平均速度、速度オーバー時間、速度オーバー回数や、エンジン回転数オーバー時間や回転数オーバー回数、急発進、急加速、急減速、アイドリング時間等を運転者毎に把握することができ、この把握された結果に基づいて、その運転者毎に安全運転や経済的な運転を促すことが可能になる。
【0005】
また、近年では、衛星から車両の走行位置を取得するGPS(Global Positioning System)装置が普及し、GPS装置により取得された車両の走行位置と、当該走行位置を走行しているときの走行速度やエンジン回転数等の車両状態と、を関連づけ、これら走行位置と車両状態とを車両情報としてメモリーカード等に記録するものもある。
【0006】
そして、表示装置上に地図画像を表示すると共に、メモリーカードに記録された車両情報(走行位置)を用いて当該地図画像上に重ねて車両の走行軌跡を表示することにより、管理者は、車両の走行ルートを把握することができ、例えば、配送などの最適ルート設定や配送計画作成などの参考とすることができた。
【0007】
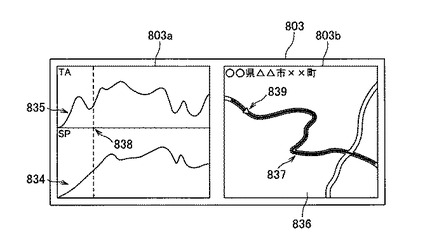
例えば、特許文献1に示される車両用表示装置は、図14に示すように、第1の表示エリア803a、第2の表示エリア803bを有する表示手段803を備えている。第1の表示エリア803aには、走行速度の変化を示すSPグラフ834とエンジン回転数の変化を示すTAグラフ835とが表示される。第2の表示エリア803bには、地図836と走行軌跡837とが表示される。そして、再生モードが実行されると、タイムバー838が所定速度で第1の表示エリア803aを横方向に移動して、再生時点における走行速度あるいはエンジン回転数を連続的に指示し、これに同期して車両位置マーク839が走行軌跡上を移動して前記再生時点における車両位置を連続的に指示する。このようにして、車両の走行ルートを車両位置マーク839の移動により再現するのと同時に、各走行位置での走行速度やエンジン回転数を把握させることができた。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2010−149668号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、上述した車両用表示装置では、走行速度やエンジン回転数等の車両状態と、車両の走行ルートの再現と、が別々の表示エリアに表示されているので、走行位置と車両状態との関係が直感的に把握しにくいという問題があった。
【0010】
本発明は、上記課題に係る問題を解決することを目的としている。即ち、本発明は、車両の走行位置と当該走行位置における走行速度やエンジン回転数等の車両状態との関係が直感的に把握できる運転状況解析支援装置を提供することを目的としている。
【課題を解決するための手段】
【0011】
請求項1に記載された発明は、上記目的を達成するために、地図画像上に車両の走行軌跡を表示する運転状況解析支援装置であって、外部機器において収集された、前記車両の走行位置と当該走行位置を走行しているときの車両状態とを含む、車両情報を記憶する車両情報記憶手段と、前記車両情報記憶手段に記憶した前記車両情報に基づいて、前記走行軌跡の各区間を前記走行位置により特定される前記地図画像上の位置に前記車両状態に対応して予め定められた表示色で時系列的に順次表示する走行軌跡再生手段と、を有していることを特徴とする運転状況解析支援装置である。
【0012】
請求項2に記載された発明は、請求項1に記載された発明において、前記車両状態には、前記車両の走行速度が含まれており、前記走行軌跡再生手段が、前記走行速度に対応して予め定められた伸長速度で前記走行軌跡の区間をその直前の区間寄りの一端から反対側の他端まで伸長して表示するように構成されていることを特徴とするものである。
【0013】
請求項3に記載された発明は、請求項1又は2に記載された発明において、前記走行軌跡再生手段が、前記車両状態が所定の条件を満足するとき、前記走行軌跡の区間上又はその近傍に、当該条件に対応して予め定められたマークを表示するように構成されていることを特徴とするものである。
【発明の効果】
【0014】
請求項1に記載された発明によれば、外部機器において収集された、車両の走行位置と当該走行位置を走行しているときの車両状態とを含む、車両情報を車両情報記憶手段に記憶して、走行軌跡再生手段が、この車両情報に基づいて、走行位置により特定される地図画像上の位置に車両状態に対応して予め定められた表示色で走行軌跡の各区間を時系列的に順次表示するので、走行軌跡の各区間を時系列的に順次表示することで車両の走行ルートを実際に走行した順路で再現できるとともに、当該位置における車両状況に応じて表示色を変えることができ、例えば、走行速度が所定の速度上限値以下のときの表示色を黒色と定め、速度上限値超のときの表示色を赤色などと定めて、走行軌跡の各区間を走行速度(車両状態)に応じて色分けして表示などすることで、走行した順路とともに運転状況を同時に把握させることができ、そのため、車両の走行位置と当該走行位置における走行速度やエンジン回転数等の車両状態との関係を直感的に把握させることができる。
【0015】
請求項2に記載された発明によれば、車両状態には車両の走行速度が含まれており、この走行速度に対応して予め定められた伸長速度で走行軌跡の区間をその直前の区間寄りの一端から反対側の他端まで伸長して表示するので、車両の速度に応じて走行軌跡の各区間の伸長速度を変えることができ、例えば、走行速度が所定の速度閾値以下のときの伸長速度を低速度と定め、速度閾値超のときの伸長速度を前記低速度より速い高速度等と定めて、走行軌跡の各区間を走行速度(車両状態)に応じてその伸長速度を変えて表示などすることで、よりリアルな走行感を演出することができ、そのため、車両の走行位置と当該走行位置における走行速度やエンジン回転数等の車両状態との関係をさらに直感的に把握させることができる。
【0016】
請求項3に記載された発明によれば、車両状態が所定の条件を満足するとき、走行軌跡の区間上又はその近傍に、当該条件に対応して予め定められたマークを表示するので、当該マークによってその区間での運転状況を把握させることができ、例えば、上記条件を走行速度が所定の速度上限値以下で且つエンジン回転数が所定の回転数上限値以下と定めて、この条件を満足するときに、走行軌跡の各区間上又はその近傍に所定のエコマークなどを表示などすることで、当該区間における運転状況を一目で把握させることができ、そのため、車両の走行位置と当該走行位置における走行速度やエンジン回転数等の車両状態との関係をさらに直感的に把握させることができる。
【図面の簡単な説明】
【0017】
【図1】本発明の運転状況解析支援装置の一実施形態のハードウェア構成を示す図である。
【図2】図1の運転状況解析支援装置の概略機能ブロック図である。
【図3】図1の運転状況解析支援装置の表示装置に表示される地図画像の一例を示す図である。
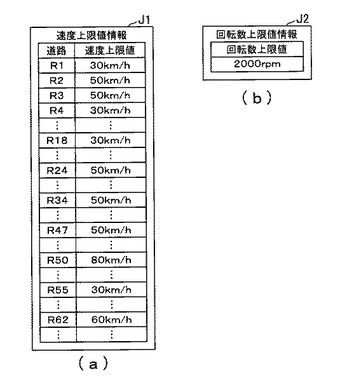
【図4】図1の運転状況解析支援装置の記憶装置に格納されるマスターデータであって、(a)は、速度上限値情報の一例を示す図であり、(b)は、回転数上限値情報の一例を示す図である。
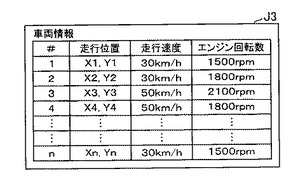
【図5】図1の運転状況解析支援装置のRAMに記憶される車両情報の一例を示す図である。
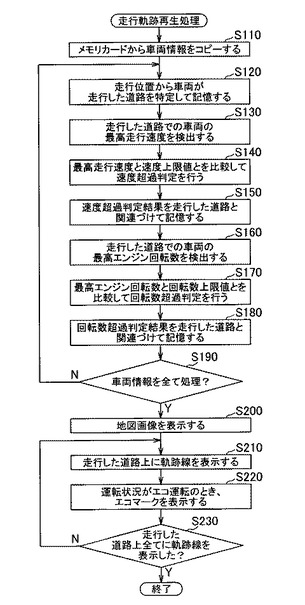
【図6】図1の運転状況解析支援装置のCPUにおける本発明に係る処理(走行軌跡再生処理)の一例を示すフローチャートである。
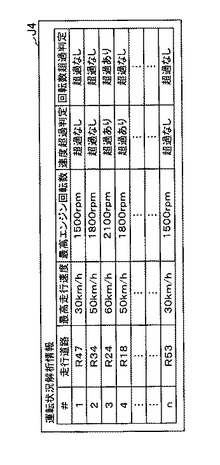
【図7】図6のフローチャートに示す処理において生成される運転状況解析情報の一例を示す図である。
【図8】図3に示す地図画像上に車両の走行軌跡全体を重ねて表示した図である。
【図9】図3に示す地図画像上に車両の走行軌跡(軌跡線K1)が重ねて表示される動作を説明する図である。
【図10】図9に続いて地図画像上に車両の走行軌跡(軌跡線K2)が重ねて表示される動作を説明する図である。
【図11】図10に続いて地図画像上に車両の走行軌跡(軌跡線K3)が重ねて表示される動作を説明する図である。
【図12】図11に続いて地図画像上に車両の走行軌跡(軌跡線K4)が重ねて表示される動作を説明する図である。
【図13】図12に続いて地図画像上に車両の走行軌跡(軌跡線K5〜K10)が重ねて表示される動作を説明する図である。
【図14】従来の車両用表示装置の動作を説明する図である。
【発明を実施するための形態】
【0018】
以下、本発明の運転状況解析支援装置の一実施形態を、図1〜図13を参照して説明する。
【0019】
このような運転状況解析支援装置は、例えば、車両を用いて運送業務を行う運送業者の事務所などに設置されており、車両に搭載されたデジタルタコグラフ等の車載機により記録等された走行位置や車両状態(走行速度、エンジン回転数など)を含む車両情報に基づいて、当該車両の運転状況の解析を支援する。本実施形態の運転状況解析支援装置は、表示装置上に地図画像を表示するとともに当該地図画像上に重ねて車両の走行軌跡を表示することで、走行ルート及び運転状況等の解析を支援するものである。このような解析に用いられる車両情報は、例えば、車載機によってSDカードやCFカードなどのメモリーカードに記録され、このメモリーカードによって運転状況解析支援装置に移される。
【0020】
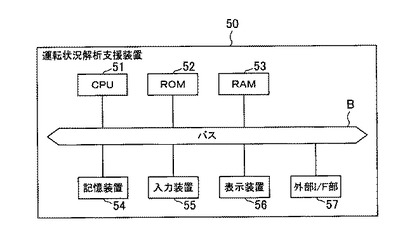
図1、図2に示す運転状況解析支援装置50(以下、支援装置50という)は、周知のパーソナルコンピュータなどで構成されている。支援装置50は、図1に示すように、予め定められたプログラムに従って支援装置50の全体の動作の制御などを行うCPU(中央演算処理装置)51を有している。このCPU51には、バスBを介してCPU51のための基本動作プログラム等を格納した読み出し専用のメモリであるROM52、CPU51の処理作業に必要な各種プログラム及び各種データを格納する作業エリア等を有する読み出し書き込み自在のメモリであるRAM53が接続されている。
【0021】
CPU51には、ハードディスク装置や大容量のメモリなどで構成された記憶装置54がバスBを介して接続されている。記憶装置54には、メモリーカードに記録された車両情報を解析して、安全運転及び低燃費運転(エコ運転)で走行しているかなどの運転状況を解析するための運転状況解析支援プログラムなどが格納されている。記憶装置54に格納された運転状況解析支援プログラムは、記憶装置54から読み出されたあとRAM53に格納(ロード)され、CPU51によって実行される。CPU51は、運転状況解析支援プログラムを実行することにより、走行軌跡再生手段などの各種手段として機能する。
【0022】
CPU51には、入力装置55、表示装置56、及び、外部I/F部57がバスBを介して接続されている。入力装置55は、キーボード、マウス等を有しており、利用者の操作に応じた入力情報をCPU51に出力する。表示装置56は、周知である液晶ディスプレイ、CRT等の各種表示器が用いられ、CPU51の制御によって、運転状況解析支援プログラムの操作画面や解析結果画面、走行軌跡再生画面などが表示される。
【0023】
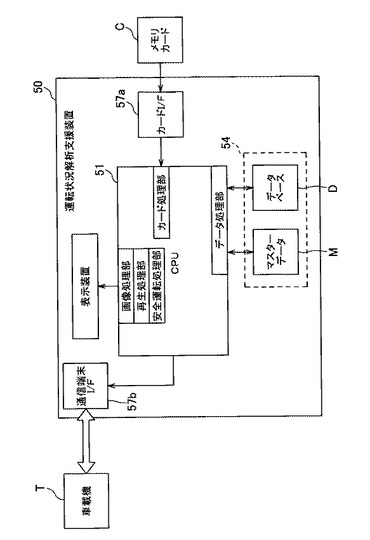
外部I/F部57は、無線通信やメモリカードアクセス等のための各種インタフェースを備え、これらインタフェースを備える外部機器等が接続される部位である。本実施形態においては、外部I/F部57には、カードI/F57aと通信端末I/F57bとが設けられている。カードI/F57aにはメモリーカードCが装着され、通信端末I/F57bには無線通信を介して車両に搭載された車載機Tが接続される。
【0024】
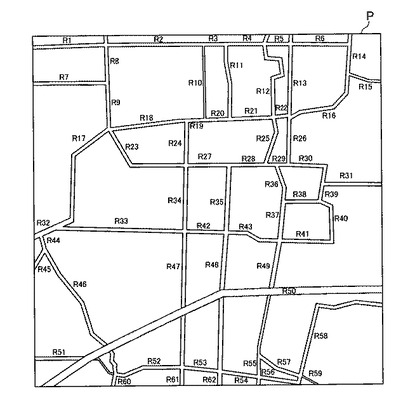
記憶装置54には、図3に一例を示す地図画像Pを表示するための地図情報と、この地図画像P上の道路Rn(nは自然数を示す)と当該道路Rnにおいて許容される速度の上限値を示す速度上限値との関係を示す速度上限値情報J1(図4(a)に示す)と、車両の走行時において許容されるエンジン回転数の上限値を示す回転数上限値情報J2(図4(b)に示す)と、がマスターデータMとして記憶されている。上記地図情報には、各道路Rnの位置を示す緯度、経度の情報も含まれている。なお、本実施形態において、「道路」とは、網目状に互いに連続する道路全体のうち分岐点と分岐点との間の区間(分岐のない部分)のことを示している。また、記憶装置54には、車両の運行に係る各種情報(運転者管理情報、車両管理情報、車両運行情報など)がデータベースDとして格納されている。
【0025】
メモリーカードCには、車載機Tによって図5に示す車両情報J3が記録される。車載機Tは、車両の走行に応じて、当該車両に搭載されたGPS装置から一定時間(例えば0.5秒)毎に走行位置(例えば、緯度、経度)を取得し、それと同時に各種センサから走行速度及びエンジン回転数等の車両状態を取得して、これらを互いに関連付けた車両情報J3を生成して、時系列順に並べてメモリーカードCに記録する。
【0026】
CPU51は、(1)メモリーカードCからRAM53に車両情報J3を読み込むカード処理部、(2)記憶装置54からマスターデータMを読み込むデータ処理部、(3)車両情報J3及びマスターデータMに含まれる速度上限値情報J1、回転数上限値情報J2に基づいて、車両が走行した道路における運転状況を解析する安全運転処理部、(4)安全運転処理部の解析結果に基づいて車両の走行軌跡の再生を行う再生処理部(5)マスターデータMに含まれる地図情報が示す地図画像P上に再生処理部による走行軌跡の再生を重ね合わせて表示装置56に表示する画像処理部、等の各種機能ブロックとして機能する。
【0027】
次に、支援装置50のCPU51が行う本発明に係る動作(走行軌跡再生処理)の一例について、図6のフローチャートを参照して説明する。
【0028】
支援装置50の入力装置55に走行軌跡再生処理の実行を要求する所定操作が入力されると、CPU51は、図6のステップS110に処理を進める。
【0029】
ステップS110では、メモリーカードCから車両情報J3を読み込むとともに、RAM53に書き出してコピーする。このとき、RAM53に代えて記憶装置54にコピーしてもよい。そして、ステップS120に進む。
【0030】
ステップS120では、RAM53にコピーされた車両情報J3の先頭から順に走行位置を取り込んで、この走行位置が示す緯度及び経度から車両が走行した地図画像P上の1つの道路Rnを特定する。本実施形態において、走行位置は短い時間間隔(0.5秒)で記録されているので、複数の走行位置によって1つの道路が特定される。また、走行位置についてはGPS装置の計測誤差なども含まれるため、走行位置が地図画像P上の道路Rnから外れている場合は、当該走行位置に最も近い道路Rnを示すものとして取り扱うなど、適宜補正などを行う。そして、RAM53上に設けられた所定の領域に運転状況解析情報J4(図7に示す)として順次記憶する。そして、ステップS130に進む。
【0031】
ステップS130では、ステップS120で特定した道路(以下、「走行道路R」という)での最高走行速度を検出する。即ち、ステップS120において走行した道路の特定に用いられた走行位置と関連して記憶された走行速度の中から最も速い走行速度を、当該道路における最高走行速度として検出する。そして、この最高走行速度を、運転状況解析情報J4に走行道路Rと関連づけて記憶する。そして、ステップS140に進む。
【0032】
ステップS140では、記憶装置54に記憶された速度上限値情報J1から走行道路Rにおける速度上限値を読み出して、ステップS130で検出した最高走行速度と、比較して、速度超過判定を行う。そして、ステップS150に進む。
【0033】
ステップS150では、速度超過判定の判定結果に基づいて当該走行道路Rでの運転状況を記憶する。即ち、最高走行速度が速度上限値以下であれば、速度超過判定結果として「超過なし」を示す情報を、運転状況解析情報J4に走行道路Rと関連づけて記憶する。または、最高走行速度が速度上限値超であれば、速度超過判定結果として「超過あり」を示す情報を、運転状況解析情報J4に走行道路Rと関連づけて記憶する。そして、ステップS160に進む。
【0034】
ステップS160では、走行道路Rでの車両の最高エンジン回転数を検出する。即ち、ステップS120において走行した道路の特定に用いられた走行位置と関連して記憶されたエンジン回転数の中から最も速いエンジン回転数を、当該道路における最高エンジン回転数として検出する。そして、この最高エンジン回転数を、運転状況解析情報J4に走行道路Rと関連づけて記憶する。そして、ステップS170に進む。
【0035】
ステップS170では、記憶装置54に記憶された回転数上限値情報J2から回転数上限値を読み出して、ステップS160で検出した最高エンジン回転数と、比較して、回転数超過判定を行う。そして、ステップS180に進む。
【0036】
ステップS180では、回転数超過判定の判定結果に基づいて当該走行道路Rでの運転状況を記憶する。即ち、最高エンジン回転数が回転数上限値以下であれば、回転数超過判定結果として「超過なし」を示す情報を、運転状況解析情報J4に走行道路Rと関連づけて記憶する。または、最高エンジン回転数が回転数上限値超であれば、回転数超過判定結果として「超過あり」を示す情報を、運転状況解析情報J4に走行道路Rと関連づけて記憶する。そして、ステップS190に進む。
【0037】
ステップS190では、車両情報J3を全て処理したか否かを判定し、全て処理していた場合は、車両が走行した道路の全てについて運転状況の解析が終了したものとして、ステップS200に進み(S190でY)、全て処理していない場合は、車両が走行した道路の全てについて運転状況の解析が終了していないものとして、ステップS120に戻る(S190でN)。
【0038】
ステップS200では、記憶装置54に記憶された地図情報に基づいて、表示装置56に地図画像Pを表示する。そして、ステップS210に進む。
【0039】
ステップS210では、運転状況解析情報J4の先頭から順次1つの走行道路Rを読み出して、この走行道路Rに対応する地図画像P上の道路Rnに重ねて、当該道路Rnに沿ってその走行始点寄りの一端から他端まで所定の伸長速度で伸長するように軌跡線Kを表示装置56に表示する。この軌跡線Kの表示色は、当該走行道路Rにおける速度判定結果に応じた色で行い、また、軌跡線Kの伸長速度は、当該走行道路Rにおける最高走行速度に応じた伸長速度で行う。即ち、速度超過判定結果が「超過なし」のとき、軌跡線Kを黒色で表示し、「超過あり」のとき、軌跡線Kを赤色で表示する。また、最高走行速度が所定の速度閾値(例えば、50km/h)以下のとき、軌跡線Kを所定の第1伸長速度V1で伸長するように表示し、所定の速度閾値超のとき、軌跡線Kを第1伸長速度V1より速い第2伸長速度V2で伸長するように表示する。勿論、黒色と赤色との組み合わせは一例であり、これ以外の色の組み合わせであってもよい。そして、ステップS220に進む。
【0040】
ステップS220では、ステップS210で読み出した走行道路Rにおいて、速度判定結果が「超過なし」で且つ回転数超過判定結果が「超過なし」のときのみ、即ち、速度超過がなく且つエンジン回転数超過もない「エコ運転」のときのみ、この走行道路Rに対応する地図画像P上の道路Rn上又はその近傍に所定のエコマークE(例えば、図9などに示す)を表示装置56に表示する。そして、ステップS230に進む。
【0041】
ステップS230では、運転状況解析情報J4の走行道路Rについて全て処理(軌跡線Kを表示)したか否かを判定して、全て処理していた場合は、車両の走行軌跡の再生が終了したものとして本フローチャートを終了し(S230でY)、全て終了していないときは、ステップS210に戻り、走行軌跡の再生を継続する(S230でN)。
【0042】
上述したステップS110が、上述した機能ブロックである上記カード処理部に相当し、ステップS120〜S190が、上記安全運転処理部に相当し、ステップS200〜S230が、上記再生処理部に相当する。上記データ処理部は、上記安全運転処理部における速度上限値情報J1、回転数上限値情報J2を読み込む機能に含まれる。上記画像処理部は、上記再生処理部における画像表示を行う機能に含まれる。
【0043】
上述したフローチャートにおいて、ステップS220におけるエコマーク表示を省略した処理構成であってもよい。また、ステップS210において、軌跡線Kを一端から他端まで伸長するように表示する処理構成であったが、これに限定されるものではなく、軌跡線Kを一端から他端まで一時に表示する処理構成であってもよい。
【0044】
次に、上述した運転状況解析支援装置50における本発明に係る動作(作用)の一例について、図7〜図12を参照して説明する。
【0045】
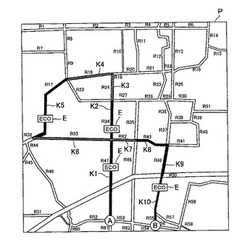
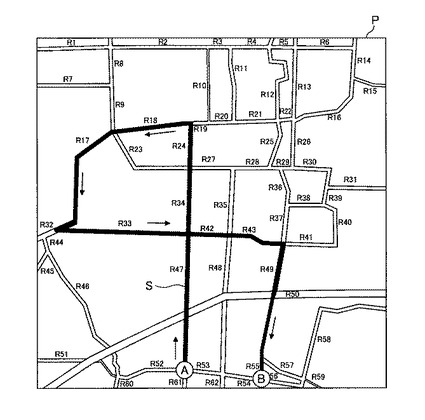
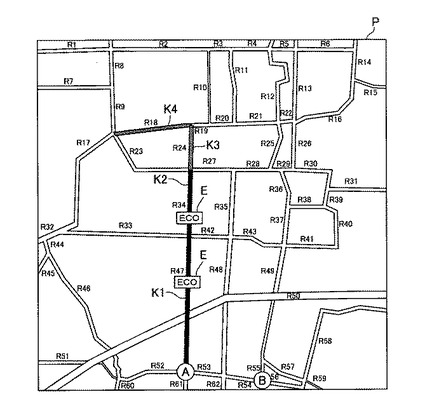
車両は、図8の地図画像P上に示される走行ルートS(順に、道路R47、道路R34、道路R24、道路R18、道路R17、道路R33、道路R42、道路R43、道路R49、道路R55)を走行始点Aから走行終点Bまで走行し、当該車両に搭載された車載機Tによって、走行時の走行位置と当該走行位置を走行しているときの車両状態(走行速度及びエンジン回転数)を含む車両情報がメモリーカードCに記録されている。
【0046】
このメモリーカードCが支援装置50に装着されたのち、支援装置50の入力装置55に走行軌跡再生処理の実行を要求する所定操作が入力されると、まず、メモリーカードCからRAM53上に車両情報J3がコピーされる(S110)。そして、車両情報J3の走行位置から車両が走行した道路(走行道路R)を特定する。
【0047】
そして、車両情報J3の走行位置から、最初に道路R47が走行道路Rとして特定される(S120)。そして、道路R47における車両の最高走行速度30km/hを検出し(S130)、これを道路R47における速度上限値50km/hと比較して、当該道路R47においては走行速度の「超過なし」と判定する(S140、S150)。また、道路R47における車両の最高エンジン回転数1500rpmを検出し(S160)、これを車両における最高エンジン回転数2000rpmと比較して、当該道路R47においてはエンジン回転数の「超過なし」と判定する(S170、S180)。
【0048】
これに続いて、道路R34を走行道路Rとして特定し、当該道路R34においては最高走行速度50km/hで速度上限値50km/hであるので、走行速度の「超過なし」と判定し、最高エンジン回転数1800rpmで回転数上限値2000rpmであるので、エンジン回転数の「超過なし」と判定する。続いて、道路R24を走行道路Rとして特定し、当該道路R24においては最高走行速度60km/hで速度上限値50km/hであるので、走行速度の「超過あり」と判定し、最高エンジン回転数2100rpmで回転数上限値2000rpmであるので、エンジン回転数の「超過あり」と判定する。続いて、道路R18を走行道路Rとして特定し、当該道路R18においては最高走行速度50km/hで速度上限値30km/hであるので、走行速度の「超過あり」と判定し、最高エンジン回転数1800rpmで回転数上限値2000rpmであるので、エンジン回転数の「超過なし」と判定する。以降、同様にして、道路R55まで特定するとともに、当該道路R55における速度超過判定及びエンジン回転数超過判定を行う。
【0049】
そして、車両情報J3の全てについて解析を終えると(S190でY)、表示装置56に図3に示す地図画像Pを表示する(S200)。
【0050】
次に、走行した道路上に走行軌跡を表示する。
【0051】
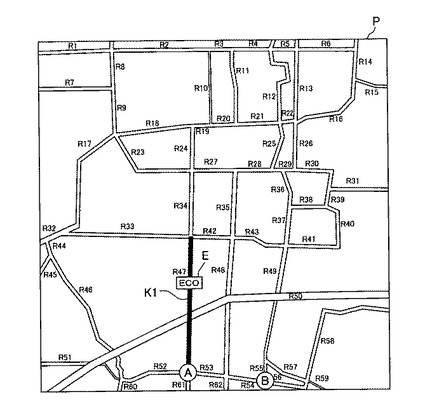
まず、道路R47上に軌跡線を表示する。このとき、当該道路R47において、速度超過判定が「超過なし」であり、且つ、最高走行速度(30km/h)が速度閾値(50km/h)以下であるので、道路R47に沿ってその走行始点A寄りの一端から他端まで第1伸長速度V1で伸長するように黒色の軌跡線K1を表示する(S210)。また、速度超過判定が「超過なし」で且つ回転数超過判定が「超過なし」であるので、道路R47上にエコマークEを表示する(S220)(図9)。
【0052】
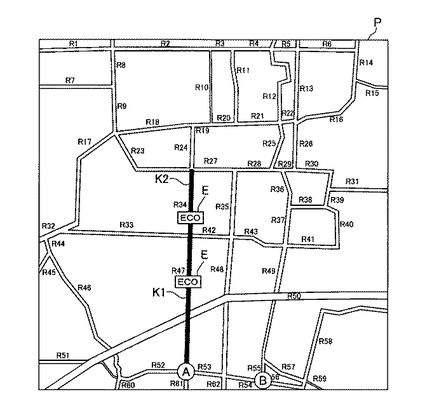
次に、道路R34上に軌跡線を表示する。このとき、当該道路R34において、速度超過判定が「超過なし」であり、且つ、最高走行速度(50km/h)が速度閾値(50km/h)以下であるので、道路R34に沿って道路R47寄りの一端から他端まで第1伸長速度V1で伸長するように黒色の軌跡線K2を表示する(S210)。また、速度超過判定が「超過なし」で且つ回転数超過判定が「超過なし」であるので、道路R34上にエコマークEを表示する(S220)(図10)。
【0053】
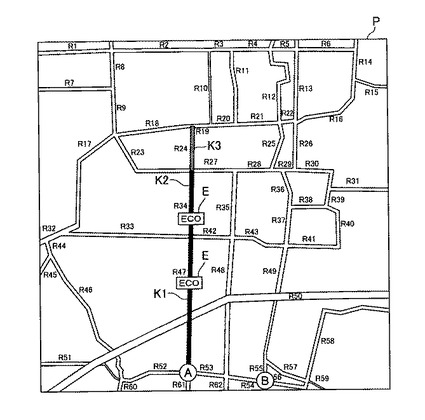
次に、道路R24上に軌跡線を表示する。このとき、当該道路R24において、速度超過判定が「超過あり」であり、且つ、最高走行速度(60km/h)が速度閾値(50km/h)超であるので、道路R24に沿って道路R34寄りの一端から他端まで第2伸長速度V2で伸長するように赤色の軌跡線K3を表示する(S210)。また、速度超過判定が「超過あり」で且つ回転数超過判定が「超過あり」であるので、道路R24上にエコマークEを表示しない(S220)(図11)。
【0054】
次に、道路R18上に軌跡線を表示する。このとき、当該道路R18において、速度超過判定が「超過あり」であり、且つ、最高走行速度(50km/h)が速度閾値(50km/h)以下であるので、道路R18に沿って道路R24寄りの一端から他端まで第1伸長速度V1で伸長するように赤色の軌跡線K4を表示する(S210)。また、速度超過判定が「超過あり」で且つ回転数超過判定が「超過なし」であるので、道路R18上にエコマークEを表示しない(S220)(図12)。
【0055】
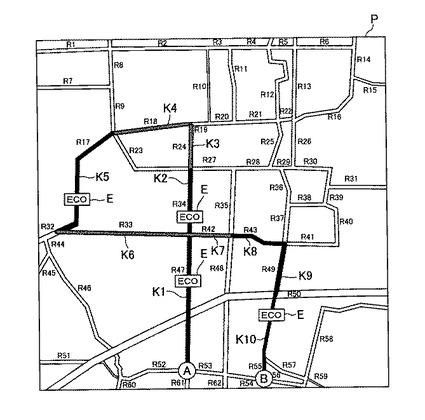
以降、同様にして、走行終点Bまで、軌跡線K5〜K10を表示して、走行軌跡の再生を終了する(S230でY)(図13)。
【0056】
以上より、本発明によれば、車載機Tにおいて収集された、車両の走行位置と当該走行位置を走行しているときの車両状態(走行速度及びエンジン回転数)を含む、車両情報J3をRAM53に記憶して、CPU51が、この車両情報J3に基づいて、走行位置により特定される地図画像上の走行道路Rに、当該走行道路Rにおける最高走行速度に対応して予め定められた表示色で、走行軌跡の区間である軌跡線Kを、時系列的に順次表示するので、軌跡線Kを時系列的に順次表示することで車両の走行ルートSを実際に走行した順路で再現できるとともに、当該各軌跡線区間における車両状況に応じて表示色を変えることができる。本実施形態においては、走行速度が所定の速度上限値以下のときの表示色を黒色と定め、速度上限値超のときの表示色を赤色と定めて、各軌跡線Kを走行速度に応じて色分けして表示することで、走行した順路とともに運転状況を同時に把握させることができ、そのため、車両の走行位置と当該走行位置における走行速度との関係を直感的に把握させることができる。
【0057】
また、車両状態には車両の走行速度が含まれており、この走行速度に対応して予め定められた伸長速度で軌跡線Kをその直前の軌跡線K寄りの一端から反対側の他端まで伸長して表示するので、車両の速度に応じて各軌跡線Kの伸長速度を変えることができる。本実施形態においては、その走行道路Rにおける最高走行速度が所定の速度閾値以下のときの伸長速度を第1伸長速度V1と定め、速度閾値超のときの伸長速度を第1伸長速度V1より速い第2伸長速度V2と定めて、各軌跡線Kを最高走行速度に応じてその伸長速度を変えて表示することで、よりリアルな走行感を演出することができ、そのため、車両の走行位置と当該走行位置における走行速度との関係をさらに直感的に把握させることができる。
【0058】
また、車両状態が所定の条件を満足するとき、軌跡線K上又はその近傍に、当該条件に対応して予め定められたマークを表示するので、当該マークによってその区間での運転状況を把握させることができる。本実施形態においては、上記条件を最高走行速度が所定の速度上限値以下(即ち、速度超過判定で「超過なし」)で且つエンジン回転数が所定の回転数上限値以下(即ち、回転数超過判定で「超過なし」)と定めて、この条件を満足するときに、軌跡線K上又はその近傍に所定のエコマークEを表示することで、当該軌跡線Kが表示された走行道路Rにおける運転状況を一目で把握させることができ、そのため、車両の走行位置と当該走行位置における最高走行速度及び最高エンジン回転数との関係をさらに直感的に把握させることができる。
【0059】
上述した本実施形態では、軌跡線Kの伸長速度が1組の第1伸長速度V1と第2伸長速度V2とで固定されているものであったが、これに限定されるものではなく、例えば、走行軌跡の再生処理において、再生速度の異なる複数の再生モード(例えば、低速再生モード、通常再生モード、高速再生モードなど)を備え、それぞれの再生モードにおいて第1伸長速度V1と第2伸長速度V2との関係を維持したまま、各再生モード間で再生速度を相対的に異ならせるように構成してもよい。一例を挙げると、通常再生モードの第1伸長速度V1を1.0(基準値)、第2伸長速度V2を2.0とし、低速再生モードの第1伸長速度V1を0.5、第2伸長速度V2を1.0とし、高速再生モードの第1伸長速度V1を2.0、第2伸長速度V2を4.0とする。また、再生モードの数も3つに限らず、構成などに応じて適宜定めても良い。また、1つのモードにおいて、第1伸長速度V1、第2伸長速度V2、第3伸長速度V3など3つ以上の伸長速度を定めてもよい。
【0060】
また、本実施形態では、地図画像P上の道路Rn(分岐点と分岐点との間の分岐のない部分)毎に軌跡線Kを表示するものであったが、これに限定されるものではない。例えば、地図画像P上の道路全体を単位距離(例えば、1km)毎に分割してそれぞれを区分道路とし、これら区分道路毎に速度上限値を定めるとともに、上記と同様にして、車両の走行位置から区分道路を特定して、各区分道路についての軌跡線Kを時系列的に順次表示するようにしてもよく、本発明の目的に反しない限り、軌跡線Kを表示する単位は任意である。
【0061】
また、本実施形態では、所定の条件を満足したときに、軌跡線K上又はその近傍にエコマークEを表示するものであったが、これ以外にも、例えば、速度超過、急加速、急減速、などの条件を定めて、これら条件を満足したときに、当該条件に対応して予め定められた速度超過マーク、急加速マーク、急減速マークなどを表示するようにしてもよい。このようにすることで、一目で運転状況を把握できるとともに、例えば、複数の運転者間において、同一箇所で急減速マークが表示された場合など、運転者以外の要因で危険な運転状況に陥ることが推測され、そのような箇所を予め運転者に通知して注意を促すことができ、事故を未然に防止できる。
【0062】
また、本実施形態では、メモリーカードCを用いて車載機Tから支援装置50のRAM53に車両情報J3を移す(コピーする)ものであったが、これに限定されるものではなく、例えば、車載機Tと支援装置50とを無線通信で接続し、当該無線通信によって車載機から支援装置50のRAM53に車両情報J3を移す構成としてもよい。または、メモリーカードCから支援装置50のRAM53に車両情報J3を移すことなく、支援装置50に装着されたメモリーカードCの車両情報J3をカードI/F57aを介してCPU51が直接アクセスするようにしてもよい。この場合、メモリーカードCが、請求項中の車両情報記憶手段に相当する。
【0063】
なお、前述した実施形態は本発明の代表的な形態を示したに過ぎず、本発明は、実施形態に限定されるものではない。即ち、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。
【符号の説明】
【0064】
50 運転状況解析支援装置
51 CPU(走行軌跡再生手段)
53 RAM(車両情報記憶手段 )
54 記憶装置
56 表示装置
T 車載機(外部機器)
P 地図画像
K 軌跡線(走行軌跡の区間)
Rn 道路(地図画像上の位置)
E エコマーク(マーク)
J1 速度上限値情報
J2 回転数上限値情報
J3 車両情報
J4 運転状況解析情報
V1 第1伸長速度(伸長速度)
V2 第2伸長速度(伸長速度)
【技術分野】
【0001】
本発明は、地図画像上に車両の走行軌跡を表示することにより運転状況の解析を支援する運転状況解析支援装置に関するものである。
【背景技術】
【0002】
例えば、タクシー、バス、トラック等の車両を用いて運送業務を行う運送業者においては、社内の各運転者に対して安全運転を促し、事故を未然に防止することが重要な課題となっている。
【0003】
そこで、各運転者が日常的に実際に安全運転を実施しているかどうかを、運送業者の社内等に配置される管理者が常時確認できるように、例えば「デジタルタコグラフ」と呼ばれる運行記録機器が実用化され利用されている。このデジタルタコグラフは、タクシー、バス、トラック等の車両毎に搭載され、一定時間(例えば0.5秒)毎に取得した走行速度やエンジン回転数等の車両状態を含む車両情報をメモリーカード等の記憶手段に自動的に記録するものである。
【0004】
そして、例えば、営業所等に設置された運転状況解析支援装置としてのパーソナルコンピュータを用いて、上記メモリーカード等に記録された車両情報等のデータを読み出して詳細に解析することにより、管理者が、その車両の走行時間、走行距離、最高速度、平均速度、速度オーバー時間、速度オーバー回数や、エンジン回転数オーバー時間や回転数オーバー回数、急発進、急加速、急減速、アイドリング時間等を運転者毎に把握することができ、この把握された結果に基づいて、その運転者毎に安全運転や経済的な運転を促すことが可能になる。
【0005】
また、近年では、衛星から車両の走行位置を取得するGPS(Global Positioning System)装置が普及し、GPS装置により取得された車両の走行位置と、当該走行位置を走行しているときの走行速度やエンジン回転数等の車両状態と、を関連づけ、これら走行位置と車両状態とを車両情報としてメモリーカード等に記録するものもある。
【0006】
そして、表示装置上に地図画像を表示すると共に、メモリーカードに記録された車両情報(走行位置)を用いて当該地図画像上に重ねて車両の走行軌跡を表示することにより、管理者は、車両の走行ルートを把握することができ、例えば、配送などの最適ルート設定や配送計画作成などの参考とすることができた。
【0007】
例えば、特許文献1に示される車両用表示装置は、図14に示すように、第1の表示エリア803a、第2の表示エリア803bを有する表示手段803を備えている。第1の表示エリア803aには、走行速度の変化を示すSPグラフ834とエンジン回転数の変化を示すTAグラフ835とが表示される。第2の表示エリア803bには、地図836と走行軌跡837とが表示される。そして、再生モードが実行されると、タイムバー838が所定速度で第1の表示エリア803aを横方向に移動して、再生時点における走行速度あるいはエンジン回転数を連続的に指示し、これに同期して車両位置マーク839が走行軌跡上を移動して前記再生時点における車両位置を連続的に指示する。このようにして、車両の走行ルートを車両位置マーク839の移動により再現するのと同時に、各走行位置での走行速度やエンジン回転数を把握させることができた。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2010−149668号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、上述した車両用表示装置では、走行速度やエンジン回転数等の車両状態と、車両の走行ルートの再現と、が別々の表示エリアに表示されているので、走行位置と車両状態との関係が直感的に把握しにくいという問題があった。
【0010】
本発明は、上記課題に係る問題を解決することを目的としている。即ち、本発明は、車両の走行位置と当該走行位置における走行速度やエンジン回転数等の車両状態との関係が直感的に把握できる運転状況解析支援装置を提供することを目的としている。
【課題を解決するための手段】
【0011】
請求項1に記載された発明は、上記目的を達成するために、地図画像上に車両の走行軌跡を表示する運転状況解析支援装置であって、外部機器において収集された、前記車両の走行位置と当該走行位置を走行しているときの車両状態とを含む、車両情報を記憶する車両情報記憶手段と、前記車両情報記憶手段に記憶した前記車両情報に基づいて、前記走行軌跡の各区間を前記走行位置により特定される前記地図画像上の位置に前記車両状態に対応して予め定められた表示色で時系列的に順次表示する走行軌跡再生手段と、を有していることを特徴とする運転状況解析支援装置である。
【0012】
請求項2に記載された発明は、請求項1に記載された発明において、前記車両状態には、前記車両の走行速度が含まれており、前記走行軌跡再生手段が、前記走行速度に対応して予め定められた伸長速度で前記走行軌跡の区間をその直前の区間寄りの一端から反対側の他端まで伸長して表示するように構成されていることを特徴とするものである。
【0013】
請求項3に記載された発明は、請求項1又は2に記載された発明において、前記走行軌跡再生手段が、前記車両状態が所定の条件を満足するとき、前記走行軌跡の区間上又はその近傍に、当該条件に対応して予め定められたマークを表示するように構成されていることを特徴とするものである。
【発明の効果】
【0014】
請求項1に記載された発明によれば、外部機器において収集された、車両の走行位置と当該走行位置を走行しているときの車両状態とを含む、車両情報を車両情報記憶手段に記憶して、走行軌跡再生手段が、この車両情報に基づいて、走行位置により特定される地図画像上の位置に車両状態に対応して予め定められた表示色で走行軌跡の各区間を時系列的に順次表示するので、走行軌跡の各区間を時系列的に順次表示することで車両の走行ルートを実際に走行した順路で再現できるとともに、当該位置における車両状況に応じて表示色を変えることができ、例えば、走行速度が所定の速度上限値以下のときの表示色を黒色と定め、速度上限値超のときの表示色を赤色などと定めて、走行軌跡の各区間を走行速度(車両状態)に応じて色分けして表示などすることで、走行した順路とともに運転状況を同時に把握させることができ、そのため、車両の走行位置と当該走行位置における走行速度やエンジン回転数等の車両状態との関係を直感的に把握させることができる。
【0015】
請求項2に記載された発明によれば、車両状態には車両の走行速度が含まれており、この走行速度に対応して予め定められた伸長速度で走行軌跡の区間をその直前の区間寄りの一端から反対側の他端まで伸長して表示するので、車両の速度に応じて走行軌跡の各区間の伸長速度を変えることができ、例えば、走行速度が所定の速度閾値以下のときの伸長速度を低速度と定め、速度閾値超のときの伸長速度を前記低速度より速い高速度等と定めて、走行軌跡の各区間を走行速度(車両状態)に応じてその伸長速度を変えて表示などすることで、よりリアルな走行感を演出することができ、そのため、車両の走行位置と当該走行位置における走行速度やエンジン回転数等の車両状態との関係をさらに直感的に把握させることができる。
【0016】
請求項3に記載された発明によれば、車両状態が所定の条件を満足するとき、走行軌跡の区間上又はその近傍に、当該条件に対応して予め定められたマークを表示するので、当該マークによってその区間での運転状況を把握させることができ、例えば、上記条件を走行速度が所定の速度上限値以下で且つエンジン回転数が所定の回転数上限値以下と定めて、この条件を満足するときに、走行軌跡の各区間上又はその近傍に所定のエコマークなどを表示などすることで、当該区間における運転状況を一目で把握させることができ、そのため、車両の走行位置と当該走行位置における走行速度やエンジン回転数等の車両状態との関係をさらに直感的に把握させることができる。
【図面の簡単な説明】
【0017】
【図1】本発明の運転状況解析支援装置の一実施形態のハードウェア構成を示す図である。
【図2】図1の運転状況解析支援装置の概略機能ブロック図である。
【図3】図1の運転状況解析支援装置の表示装置に表示される地図画像の一例を示す図である。
【図4】図1の運転状況解析支援装置の記憶装置に格納されるマスターデータであって、(a)は、速度上限値情報の一例を示す図であり、(b)は、回転数上限値情報の一例を示す図である。
【図5】図1の運転状況解析支援装置のRAMに記憶される車両情報の一例を示す図である。
【図6】図1の運転状況解析支援装置のCPUにおける本発明に係る処理(走行軌跡再生処理)の一例を示すフローチャートである。
【図7】図6のフローチャートに示す処理において生成される運転状況解析情報の一例を示す図である。
【図8】図3に示す地図画像上に車両の走行軌跡全体を重ねて表示した図である。
【図9】図3に示す地図画像上に車両の走行軌跡(軌跡線K1)が重ねて表示される動作を説明する図である。
【図10】図9に続いて地図画像上に車両の走行軌跡(軌跡線K2)が重ねて表示される動作を説明する図である。
【図11】図10に続いて地図画像上に車両の走行軌跡(軌跡線K3)が重ねて表示される動作を説明する図である。
【図12】図11に続いて地図画像上に車両の走行軌跡(軌跡線K4)が重ねて表示される動作を説明する図である。
【図13】図12に続いて地図画像上に車両の走行軌跡(軌跡線K5〜K10)が重ねて表示される動作を説明する図である。
【図14】従来の車両用表示装置の動作を説明する図である。
【発明を実施するための形態】
【0018】
以下、本発明の運転状況解析支援装置の一実施形態を、図1〜図13を参照して説明する。
【0019】
このような運転状況解析支援装置は、例えば、車両を用いて運送業務を行う運送業者の事務所などに設置されており、車両に搭載されたデジタルタコグラフ等の車載機により記録等された走行位置や車両状態(走行速度、エンジン回転数など)を含む車両情報に基づいて、当該車両の運転状況の解析を支援する。本実施形態の運転状況解析支援装置は、表示装置上に地図画像を表示するとともに当該地図画像上に重ねて車両の走行軌跡を表示することで、走行ルート及び運転状況等の解析を支援するものである。このような解析に用いられる車両情報は、例えば、車載機によってSDカードやCFカードなどのメモリーカードに記録され、このメモリーカードによって運転状況解析支援装置に移される。
【0020】
図1、図2に示す運転状況解析支援装置50(以下、支援装置50という)は、周知のパーソナルコンピュータなどで構成されている。支援装置50は、図1に示すように、予め定められたプログラムに従って支援装置50の全体の動作の制御などを行うCPU(中央演算処理装置)51を有している。このCPU51には、バスBを介してCPU51のための基本動作プログラム等を格納した読み出し専用のメモリであるROM52、CPU51の処理作業に必要な各種プログラム及び各種データを格納する作業エリア等を有する読み出し書き込み自在のメモリであるRAM53が接続されている。
【0021】
CPU51には、ハードディスク装置や大容量のメモリなどで構成された記憶装置54がバスBを介して接続されている。記憶装置54には、メモリーカードに記録された車両情報を解析して、安全運転及び低燃費運転(エコ運転)で走行しているかなどの運転状況を解析するための運転状況解析支援プログラムなどが格納されている。記憶装置54に格納された運転状況解析支援プログラムは、記憶装置54から読み出されたあとRAM53に格納(ロード)され、CPU51によって実行される。CPU51は、運転状況解析支援プログラムを実行することにより、走行軌跡再生手段などの各種手段として機能する。
【0022】
CPU51には、入力装置55、表示装置56、及び、外部I/F部57がバスBを介して接続されている。入力装置55は、キーボード、マウス等を有しており、利用者の操作に応じた入力情報をCPU51に出力する。表示装置56は、周知である液晶ディスプレイ、CRT等の各種表示器が用いられ、CPU51の制御によって、運転状況解析支援プログラムの操作画面や解析結果画面、走行軌跡再生画面などが表示される。
【0023】
外部I/F部57は、無線通信やメモリカードアクセス等のための各種インタフェースを備え、これらインタフェースを備える外部機器等が接続される部位である。本実施形態においては、外部I/F部57には、カードI/F57aと通信端末I/F57bとが設けられている。カードI/F57aにはメモリーカードCが装着され、通信端末I/F57bには無線通信を介して車両に搭載された車載機Tが接続される。
【0024】
記憶装置54には、図3に一例を示す地図画像Pを表示するための地図情報と、この地図画像P上の道路Rn(nは自然数を示す)と当該道路Rnにおいて許容される速度の上限値を示す速度上限値との関係を示す速度上限値情報J1(図4(a)に示す)と、車両の走行時において許容されるエンジン回転数の上限値を示す回転数上限値情報J2(図4(b)に示す)と、がマスターデータMとして記憶されている。上記地図情報には、各道路Rnの位置を示す緯度、経度の情報も含まれている。なお、本実施形態において、「道路」とは、網目状に互いに連続する道路全体のうち分岐点と分岐点との間の区間(分岐のない部分)のことを示している。また、記憶装置54には、車両の運行に係る各種情報(運転者管理情報、車両管理情報、車両運行情報など)がデータベースDとして格納されている。
【0025】
メモリーカードCには、車載機Tによって図5に示す車両情報J3が記録される。車載機Tは、車両の走行に応じて、当該車両に搭載されたGPS装置から一定時間(例えば0.5秒)毎に走行位置(例えば、緯度、経度)を取得し、それと同時に各種センサから走行速度及びエンジン回転数等の車両状態を取得して、これらを互いに関連付けた車両情報J3を生成して、時系列順に並べてメモリーカードCに記録する。
【0026】
CPU51は、(1)メモリーカードCからRAM53に車両情報J3を読み込むカード処理部、(2)記憶装置54からマスターデータMを読み込むデータ処理部、(3)車両情報J3及びマスターデータMに含まれる速度上限値情報J1、回転数上限値情報J2に基づいて、車両が走行した道路における運転状況を解析する安全運転処理部、(4)安全運転処理部の解析結果に基づいて車両の走行軌跡の再生を行う再生処理部(5)マスターデータMに含まれる地図情報が示す地図画像P上に再生処理部による走行軌跡の再生を重ね合わせて表示装置56に表示する画像処理部、等の各種機能ブロックとして機能する。
【0027】
次に、支援装置50のCPU51が行う本発明に係る動作(走行軌跡再生処理)の一例について、図6のフローチャートを参照して説明する。
【0028】
支援装置50の入力装置55に走行軌跡再生処理の実行を要求する所定操作が入力されると、CPU51は、図6のステップS110に処理を進める。
【0029】
ステップS110では、メモリーカードCから車両情報J3を読み込むとともに、RAM53に書き出してコピーする。このとき、RAM53に代えて記憶装置54にコピーしてもよい。そして、ステップS120に進む。
【0030】
ステップS120では、RAM53にコピーされた車両情報J3の先頭から順に走行位置を取り込んで、この走行位置が示す緯度及び経度から車両が走行した地図画像P上の1つの道路Rnを特定する。本実施形態において、走行位置は短い時間間隔(0.5秒)で記録されているので、複数の走行位置によって1つの道路が特定される。また、走行位置についてはGPS装置の計測誤差なども含まれるため、走行位置が地図画像P上の道路Rnから外れている場合は、当該走行位置に最も近い道路Rnを示すものとして取り扱うなど、適宜補正などを行う。そして、RAM53上に設けられた所定の領域に運転状況解析情報J4(図7に示す)として順次記憶する。そして、ステップS130に進む。
【0031】
ステップS130では、ステップS120で特定した道路(以下、「走行道路R」という)での最高走行速度を検出する。即ち、ステップS120において走行した道路の特定に用いられた走行位置と関連して記憶された走行速度の中から最も速い走行速度を、当該道路における最高走行速度として検出する。そして、この最高走行速度を、運転状況解析情報J4に走行道路Rと関連づけて記憶する。そして、ステップS140に進む。
【0032】
ステップS140では、記憶装置54に記憶された速度上限値情報J1から走行道路Rにおける速度上限値を読み出して、ステップS130で検出した最高走行速度と、比較して、速度超過判定を行う。そして、ステップS150に進む。
【0033】
ステップS150では、速度超過判定の判定結果に基づいて当該走行道路Rでの運転状況を記憶する。即ち、最高走行速度が速度上限値以下であれば、速度超過判定結果として「超過なし」を示す情報を、運転状況解析情報J4に走行道路Rと関連づけて記憶する。または、最高走行速度が速度上限値超であれば、速度超過判定結果として「超過あり」を示す情報を、運転状況解析情報J4に走行道路Rと関連づけて記憶する。そして、ステップS160に進む。
【0034】
ステップS160では、走行道路Rでの車両の最高エンジン回転数を検出する。即ち、ステップS120において走行した道路の特定に用いられた走行位置と関連して記憶されたエンジン回転数の中から最も速いエンジン回転数を、当該道路における最高エンジン回転数として検出する。そして、この最高エンジン回転数を、運転状況解析情報J4に走行道路Rと関連づけて記憶する。そして、ステップS170に進む。
【0035】
ステップS170では、記憶装置54に記憶された回転数上限値情報J2から回転数上限値を読み出して、ステップS160で検出した最高エンジン回転数と、比較して、回転数超過判定を行う。そして、ステップS180に進む。
【0036】
ステップS180では、回転数超過判定の判定結果に基づいて当該走行道路Rでの運転状況を記憶する。即ち、最高エンジン回転数が回転数上限値以下であれば、回転数超過判定結果として「超過なし」を示す情報を、運転状況解析情報J4に走行道路Rと関連づけて記憶する。または、最高エンジン回転数が回転数上限値超であれば、回転数超過判定結果として「超過あり」を示す情報を、運転状況解析情報J4に走行道路Rと関連づけて記憶する。そして、ステップS190に進む。
【0037】
ステップS190では、車両情報J3を全て処理したか否かを判定し、全て処理していた場合は、車両が走行した道路の全てについて運転状況の解析が終了したものとして、ステップS200に進み(S190でY)、全て処理していない場合は、車両が走行した道路の全てについて運転状況の解析が終了していないものとして、ステップS120に戻る(S190でN)。
【0038】
ステップS200では、記憶装置54に記憶された地図情報に基づいて、表示装置56に地図画像Pを表示する。そして、ステップS210に進む。
【0039】
ステップS210では、運転状況解析情報J4の先頭から順次1つの走行道路Rを読み出して、この走行道路Rに対応する地図画像P上の道路Rnに重ねて、当該道路Rnに沿ってその走行始点寄りの一端から他端まで所定の伸長速度で伸長するように軌跡線Kを表示装置56に表示する。この軌跡線Kの表示色は、当該走行道路Rにおける速度判定結果に応じた色で行い、また、軌跡線Kの伸長速度は、当該走行道路Rにおける最高走行速度に応じた伸長速度で行う。即ち、速度超過判定結果が「超過なし」のとき、軌跡線Kを黒色で表示し、「超過あり」のとき、軌跡線Kを赤色で表示する。また、最高走行速度が所定の速度閾値(例えば、50km/h)以下のとき、軌跡線Kを所定の第1伸長速度V1で伸長するように表示し、所定の速度閾値超のとき、軌跡線Kを第1伸長速度V1より速い第2伸長速度V2で伸長するように表示する。勿論、黒色と赤色との組み合わせは一例であり、これ以外の色の組み合わせであってもよい。そして、ステップS220に進む。
【0040】
ステップS220では、ステップS210で読み出した走行道路Rにおいて、速度判定結果が「超過なし」で且つ回転数超過判定結果が「超過なし」のときのみ、即ち、速度超過がなく且つエンジン回転数超過もない「エコ運転」のときのみ、この走行道路Rに対応する地図画像P上の道路Rn上又はその近傍に所定のエコマークE(例えば、図9などに示す)を表示装置56に表示する。そして、ステップS230に進む。
【0041】
ステップS230では、運転状況解析情報J4の走行道路Rについて全て処理(軌跡線Kを表示)したか否かを判定して、全て処理していた場合は、車両の走行軌跡の再生が終了したものとして本フローチャートを終了し(S230でY)、全て終了していないときは、ステップS210に戻り、走行軌跡の再生を継続する(S230でN)。
【0042】
上述したステップS110が、上述した機能ブロックである上記カード処理部に相当し、ステップS120〜S190が、上記安全運転処理部に相当し、ステップS200〜S230が、上記再生処理部に相当する。上記データ処理部は、上記安全運転処理部における速度上限値情報J1、回転数上限値情報J2を読み込む機能に含まれる。上記画像処理部は、上記再生処理部における画像表示を行う機能に含まれる。
【0043】
上述したフローチャートにおいて、ステップS220におけるエコマーク表示を省略した処理構成であってもよい。また、ステップS210において、軌跡線Kを一端から他端まで伸長するように表示する処理構成であったが、これに限定されるものではなく、軌跡線Kを一端から他端まで一時に表示する処理構成であってもよい。
【0044】
次に、上述した運転状況解析支援装置50における本発明に係る動作(作用)の一例について、図7〜図12を参照して説明する。
【0045】
車両は、図8の地図画像P上に示される走行ルートS(順に、道路R47、道路R34、道路R24、道路R18、道路R17、道路R33、道路R42、道路R43、道路R49、道路R55)を走行始点Aから走行終点Bまで走行し、当該車両に搭載された車載機Tによって、走行時の走行位置と当該走行位置を走行しているときの車両状態(走行速度及びエンジン回転数)を含む車両情報がメモリーカードCに記録されている。
【0046】
このメモリーカードCが支援装置50に装着されたのち、支援装置50の入力装置55に走行軌跡再生処理の実行を要求する所定操作が入力されると、まず、メモリーカードCからRAM53上に車両情報J3がコピーされる(S110)。そして、車両情報J3の走行位置から車両が走行した道路(走行道路R)を特定する。
【0047】
そして、車両情報J3の走行位置から、最初に道路R47が走行道路Rとして特定される(S120)。そして、道路R47における車両の最高走行速度30km/hを検出し(S130)、これを道路R47における速度上限値50km/hと比較して、当該道路R47においては走行速度の「超過なし」と判定する(S140、S150)。また、道路R47における車両の最高エンジン回転数1500rpmを検出し(S160)、これを車両における最高エンジン回転数2000rpmと比較して、当該道路R47においてはエンジン回転数の「超過なし」と判定する(S170、S180)。
【0048】
これに続いて、道路R34を走行道路Rとして特定し、当該道路R34においては最高走行速度50km/hで速度上限値50km/hであるので、走行速度の「超過なし」と判定し、最高エンジン回転数1800rpmで回転数上限値2000rpmであるので、エンジン回転数の「超過なし」と判定する。続いて、道路R24を走行道路Rとして特定し、当該道路R24においては最高走行速度60km/hで速度上限値50km/hであるので、走行速度の「超過あり」と判定し、最高エンジン回転数2100rpmで回転数上限値2000rpmであるので、エンジン回転数の「超過あり」と判定する。続いて、道路R18を走行道路Rとして特定し、当該道路R18においては最高走行速度50km/hで速度上限値30km/hであるので、走行速度の「超過あり」と判定し、最高エンジン回転数1800rpmで回転数上限値2000rpmであるので、エンジン回転数の「超過なし」と判定する。以降、同様にして、道路R55まで特定するとともに、当該道路R55における速度超過判定及びエンジン回転数超過判定を行う。
【0049】
そして、車両情報J3の全てについて解析を終えると(S190でY)、表示装置56に図3に示す地図画像Pを表示する(S200)。
【0050】
次に、走行した道路上に走行軌跡を表示する。
【0051】
まず、道路R47上に軌跡線を表示する。このとき、当該道路R47において、速度超過判定が「超過なし」であり、且つ、最高走行速度(30km/h)が速度閾値(50km/h)以下であるので、道路R47に沿ってその走行始点A寄りの一端から他端まで第1伸長速度V1で伸長するように黒色の軌跡線K1を表示する(S210)。また、速度超過判定が「超過なし」で且つ回転数超過判定が「超過なし」であるので、道路R47上にエコマークEを表示する(S220)(図9)。
【0052】
次に、道路R34上に軌跡線を表示する。このとき、当該道路R34において、速度超過判定が「超過なし」であり、且つ、最高走行速度(50km/h)が速度閾値(50km/h)以下であるので、道路R34に沿って道路R47寄りの一端から他端まで第1伸長速度V1で伸長するように黒色の軌跡線K2を表示する(S210)。また、速度超過判定が「超過なし」で且つ回転数超過判定が「超過なし」であるので、道路R34上にエコマークEを表示する(S220)(図10)。
【0053】
次に、道路R24上に軌跡線を表示する。このとき、当該道路R24において、速度超過判定が「超過あり」であり、且つ、最高走行速度(60km/h)が速度閾値(50km/h)超であるので、道路R24に沿って道路R34寄りの一端から他端まで第2伸長速度V2で伸長するように赤色の軌跡線K3を表示する(S210)。また、速度超過判定が「超過あり」で且つ回転数超過判定が「超過あり」であるので、道路R24上にエコマークEを表示しない(S220)(図11)。
【0054】
次に、道路R18上に軌跡線を表示する。このとき、当該道路R18において、速度超過判定が「超過あり」であり、且つ、最高走行速度(50km/h)が速度閾値(50km/h)以下であるので、道路R18に沿って道路R24寄りの一端から他端まで第1伸長速度V1で伸長するように赤色の軌跡線K4を表示する(S210)。また、速度超過判定が「超過あり」で且つ回転数超過判定が「超過なし」であるので、道路R18上にエコマークEを表示しない(S220)(図12)。
【0055】
以降、同様にして、走行終点Bまで、軌跡線K5〜K10を表示して、走行軌跡の再生を終了する(S230でY)(図13)。
【0056】
以上より、本発明によれば、車載機Tにおいて収集された、車両の走行位置と当該走行位置を走行しているときの車両状態(走行速度及びエンジン回転数)を含む、車両情報J3をRAM53に記憶して、CPU51が、この車両情報J3に基づいて、走行位置により特定される地図画像上の走行道路Rに、当該走行道路Rにおける最高走行速度に対応して予め定められた表示色で、走行軌跡の区間である軌跡線Kを、時系列的に順次表示するので、軌跡線Kを時系列的に順次表示することで車両の走行ルートSを実際に走行した順路で再現できるとともに、当該各軌跡線区間における車両状況に応じて表示色を変えることができる。本実施形態においては、走行速度が所定の速度上限値以下のときの表示色を黒色と定め、速度上限値超のときの表示色を赤色と定めて、各軌跡線Kを走行速度に応じて色分けして表示することで、走行した順路とともに運転状況を同時に把握させることができ、そのため、車両の走行位置と当該走行位置における走行速度との関係を直感的に把握させることができる。
【0057】
また、車両状態には車両の走行速度が含まれており、この走行速度に対応して予め定められた伸長速度で軌跡線Kをその直前の軌跡線K寄りの一端から反対側の他端まで伸長して表示するので、車両の速度に応じて各軌跡線Kの伸長速度を変えることができる。本実施形態においては、その走行道路Rにおける最高走行速度が所定の速度閾値以下のときの伸長速度を第1伸長速度V1と定め、速度閾値超のときの伸長速度を第1伸長速度V1より速い第2伸長速度V2と定めて、各軌跡線Kを最高走行速度に応じてその伸長速度を変えて表示することで、よりリアルな走行感を演出することができ、そのため、車両の走行位置と当該走行位置における走行速度との関係をさらに直感的に把握させることができる。
【0058】
また、車両状態が所定の条件を満足するとき、軌跡線K上又はその近傍に、当該条件に対応して予め定められたマークを表示するので、当該マークによってその区間での運転状況を把握させることができる。本実施形態においては、上記条件を最高走行速度が所定の速度上限値以下(即ち、速度超過判定で「超過なし」)で且つエンジン回転数が所定の回転数上限値以下(即ち、回転数超過判定で「超過なし」)と定めて、この条件を満足するときに、軌跡線K上又はその近傍に所定のエコマークEを表示することで、当該軌跡線Kが表示された走行道路Rにおける運転状況を一目で把握させることができ、そのため、車両の走行位置と当該走行位置における最高走行速度及び最高エンジン回転数との関係をさらに直感的に把握させることができる。
【0059】
上述した本実施形態では、軌跡線Kの伸長速度が1組の第1伸長速度V1と第2伸長速度V2とで固定されているものであったが、これに限定されるものではなく、例えば、走行軌跡の再生処理において、再生速度の異なる複数の再生モード(例えば、低速再生モード、通常再生モード、高速再生モードなど)を備え、それぞれの再生モードにおいて第1伸長速度V1と第2伸長速度V2との関係を維持したまま、各再生モード間で再生速度を相対的に異ならせるように構成してもよい。一例を挙げると、通常再生モードの第1伸長速度V1を1.0(基準値)、第2伸長速度V2を2.0とし、低速再生モードの第1伸長速度V1を0.5、第2伸長速度V2を1.0とし、高速再生モードの第1伸長速度V1を2.0、第2伸長速度V2を4.0とする。また、再生モードの数も3つに限らず、構成などに応じて適宜定めても良い。また、1つのモードにおいて、第1伸長速度V1、第2伸長速度V2、第3伸長速度V3など3つ以上の伸長速度を定めてもよい。
【0060】
また、本実施形態では、地図画像P上の道路Rn(分岐点と分岐点との間の分岐のない部分)毎に軌跡線Kを表示するものであったが、これに限定されるものではない。例えば、地図画像P上の道路全体を単位距離(例えば、1km)毎に分割してそれぞれを区分道路とし、これら区分道路毎に速度上限値を定めるとともに、上記と同様にして、車両の走行位置から区分道路を特定して、各区分道路についての軌跡線Kを時系列的に順次表示するようにしてもよく、本発明の目的に反しない限り、軌跡線Kを表示する単位は任意である。
【0061】
また、本実施形態では、所定の条件を満足したときに、軌跡線K上又はその近傍にエコマークEを表示するものであったが、これ以外にも、例えば、速度超過、急加速、急減速、などの条件を定めて、これら条件を満足したときに、当該条件に対応して予め定められた速度超過マーク、急加速マーク、急減速マークなどを表示するようにしてもよい。このようにすることで、一目で運転状況を把握できるとともに、例えば、複数の運転者間において、同一箇所で急減速マークが表示された場合など、運転者以外の要因で危険な運転状況に陥ることが推測され、そのような箇所を予め運転者に通知して注意を促すことができ、事故を未然に防止できる。
【0062】
また、本実施形態では、メモリーカードCを用いて車載機Tから支援装置50のRAM53に車両情報J3を移す(コピーする)ものであったが、これに限定されるものではなく、例えば、車載機Tと支援装置50とを無線通信で接続し、当該無線通信によって車載機から支援装置50のRAM53に車両情報J3を移す構成としてもよい。または、メモリーカードCから支援装置50のRAM53に車両情報J3を移すことなく、支援装置50に装着されたメモリーカードCの車両情報J3をカードI/F57aを介してCPU51が直接アクセスするようにしてもよい。この場合、メモリーカードCが、請求項中の車両情報記憶手段に相当する。
【0063】
なお、前述した実施形態は本発明の代表的な形態を示したに過ぎず、本発明は、実施形態に限定されるものではない。即ち、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。
【符号の説明】
【0064】
50 運転状況解析支援装置
51 CPU(走行軌跡再生手段)
53 RAM(車両情報記憶手段 )
54 記憶装置
56 表示装置
T 車載機(外部機器)
P 地図画像
K 軌跡線(走行軌跡の区間)
Rn 道路(地図画像上の位置)
E エコマーク(マーク)
J1 速度上限値情報
J2 回転数上限値情報
J3 車両情報
J4 運転状況解析情報
V1 第1伸長速度(伸長速度)
V2 第2伸長速度(伸長速度)
【特許請求の範囲】
【請求項1】
地図画像上に車両の走行軌跡を表示する運転状況解析支援装置であって、
外部機器において収集された、前記車両の走行位置と当該走行位置を走行しているときの車両状態とを含む、車両情報を記憶する車両情報記憶手段と、
前記車両情報記憶手段に記憶した前記車両情報に基づいて、前記走行軌跡の各区間を前記走行位置により特定される前記地図画像上の位置に前記車両状態に対応して予め定められた表示色で時系列的に順次表示する走行軌跡再生手段と、を有している
ことを特徴とする運転状況解析支援装置。
【請求項2】
前記車両状態には、前記車両の走行速度が含まれており、
前記走行軌跡再生手段が、前記走行速度に対応して予め定められた伸長速度で前記走行軌跡の区間をその直前の区間寄りの一端から反対側の他端まで伸長して表示するように構成されていることを特徴とする請求項1に記載の運転状況解析支援装置。
【請求項3】
前記走行軌跡再生手段が、前記車両状態が所定の条件を満足するとき、前記走行軌跡の区間上又はその近傍に、当該条件に対応して予め定められたマークを表示するように構成されていることを特徴とする請求項1又は2に記載された運転状況解析支援装置。
【請求項1】
地図画像上に車両の走行軌跡を表示する運転状況解析支援装置であって、
外部機器において収集された、前記車両の走行位置と当該走行位置を走行しているときの車両状態とを含む、車両情報を記憶する車両情報記憶手段と、
前記車両情報記憶手段に記憶した前記車両情報に基づいて、前記走行軌跡の各区間を前記走行位置により特定される前記地図画像上の位置に前記車両状態に対応して予め定められた表示色で時系列的に順次表示する走行軌跡再生手段と、を有している
ことを特徴とする運転状況解析支援装置。
【請求項2】
前記車両状態には、前記車両の走行速度が含まれており、
前記走行軌跡再生手段が、前記走行速度に対応して予め定められた伸長速度で前記走行軌跡の区間をその直前の区間寄りの一端から反対側の他端まで伸長して表示するように構成されていることを特徴とする請求項1に記載の運転状況解析支援装置。
【請求項3】
前記走行軌跡再生手段が、前記車両状態が所定の条件を満足するとき、前記走行軌跡の区間上又はその近傍に、当該条件に対応して予め定められたマークを表示するように構成されていることを特徴とする請求項1又は2に記載された運転状況解析支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−203662(P2012−203662A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2011−67871(P2011−67871)
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000006895)矢崎総業株式会社 (7,019)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000006895)矢崎総業株式会社 (7,019)
【Fターム(参考)】
[ Back to top ]