
運転監視システム
【課題】走行パターンが変化する自動車での走行に対応した運転監視システムを提供する。
【解決手段】自動車の走行する位置と時刻を検出する車両位置検出部10と、検出した走行位置と時刻を走行履歴として蓄積するとともに、走行履歴から自動車の走行パターンを推定する推定部20と、走行位置と時刻の情報をもとに自動車の走行状態を認識するとともに、認識した走行状態と推定部で推定された走行パターンとを比較して走行状態と走行パターンとの乖離を判断する判定部30と、判断結果を所定の通信端末に対し送信する通信部40とを備える。
【解決手段】自動車の走行する位置と時刻を検出する車両位置検出部10と、検出した走行位置と時刻を走行履歴として蓄積するとともに、走行履歴から自動車の走行パターンを推定する推定部20と、走行位置と時刻の情報をもとに自動車の走行状態を認識するとともに、認識した走行状態と推定部で推定された走行パターンとを比較して走行状態と走行パターンとの乖離を判断する判定部30と、判断結果を所定の通信端末に対し送信する通信部40とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、自動車の位置と時間情報を取得してその走行状態を監視する運転監視システムに関する。
【背景技術】
【0002】
近年、遠隔地にいる家族や親戚等が日々安全に行動しているかを見守りたいというニーズが増えてきており、そのニーズにこたえるものとして、例えば公共交通機関等を利用して通学する子供に異常が発生していないか等を携帯電話のGPS機能等を用いて取得する監視システムが存在する。(例えば、特許文献1参照。)
【0003】
この監視システムでは、移動経路を監視システムに予め設定し、子供には携帯端末を持たせている。そして、予め定めた移動経路からの逸脱に加え、移動方向や移動速度をも監視対象とすることで、間違った列車に乗ったり不審者に車で連れ去られたりするといった異常状態の検出を可能としている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−252798号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一方、近年の高齢化社会においては、高齢者の生活の見守りについても重要となっており、例えば一人暮らしの高齢者の住宅内に設置したセンサーからの情報を元に在宅状態等を把握し、遠隔地に離れた家族にメール等で通知する、あるいは状態応じてガードマンが急行するといったサービスが存在する。
【0006】
高齢者の生活においては家庭内だけでなく、屋外での移動についても危険を伴う場合があり、特に身体能力、判断能力が低下した高齢者ドライバーの運転による事故は社会問題化している。
【0007】
特に、交通の便が良くない地方に住む一人暮らしの高齢者は、自身の運転技術に不安を覚えながらも通院や買い物のためにやむを得ず運転を続ける場合もあり、問題の解決を困難にしている。
【0008】
高齢者ドライバーの日常的な生活における行動としては、例えば、勤務場所、複数のスーパー、飲食店、病院、友人・知人宅等への定期的な移動が考えられ、一般的なドライバーに比べて走行範囲は限られるものの、児童の通学に比べると走行パターンのばらつきが多い。
【0009】
しかしながら、上記特許文献1の監視システムは、前記の通り公共交通機関等を利用して移動する児童等の見守りを対象とし、通学時間帯において特定の通学ルートを通っているかなど限定された移動パターンからの逸脱の監視に特化している。
【0010】
このため、上記特許文献1のように単に予め固定的に設定した経路(場所、時間)からの逸脱を監視する方法だけでは、高齢者ドライバーの日常的な行動や走行範囲からの逸脱の監視には十分でないというという課題があった。
【0011】
本発明は、上記の課題を解決するためになされたものであって、自動車での走行に対応可能な運転監視システムを提供することにある。
【課題を解決するための手段】
【0012】
本発明にかかる運転監視システムは、自動車の走行状態と、自動車の走行履歴から(自動的に)推定した走行パターンとを対比して、対比した結果を例えば遠隔地にある所定の通信端末に通知することを特徴とする。
【0013】
具体的には、自動車に搭載する運転監視システムであって、自動車の走行位置および走行時刻を検出する車両位置検出部と、車両位置検出部が検出した走行位置および走行時刻の情報を走行履歴情報として記憶する記憶手段を有し、走行履歴情報をもとに自動車の走行パターンを推定する推定部と、車両位置検出部が取得した走行位置および走行時刻の情報をもとに自動車の走行状態を認識し、認識した自動車の走行状態が推定部で推定した走行パターンと乖離(合致)した走行状態かどうかを判断する判定部と、判定部の判断結果を所定の通信端末に対し送信する通信部を備えたものである。
【発明の効果】
【0014】
この発明によれば、自動車の走行状態と、自動車の走行履歴から(自動的に)推定した走行パターンを対比に用いてその結果を通信端末に通知するように構成したので、移動経路などの監視条件を予め設定あるいは登録するための手間が少なくて済む。
【0015】
また、自動的に走行パターンを推定するため、走行パターンの変化に柔軟に対応することができ、監視条件を修正する手間が少なくて済む。
【図面の簡単な説明】
【0016】
【図1】この発明の実施の形態1にかかる運転監視システムを示す概要図である。
【図2】この発明の実施の形態1にかかる運転監視システムの推定部における動作フローを示す図である。
【図3】この発明の実施の形態1にかかる走行履歴の情報を示す図である。
【図4】この発明の実施の形態1にかかる自宅と目的地の推定結果の情報を示す図である。
【図5】この発明の実施の形態1にかかる自宅と目的地の間の走行経路の情報を示す図である。
【図6】この発明の実施の形態2にかかる運転監視システムを示す概要図である。
【図7】この発明の実施の形態3にかかる運転監視システムを示す概要図である。
【図8】この発明の実施の形態4にかかる運転監視システムを示す概要図である。
【図9】この発明の実施の形態4にかかる通知及び応答の情報を示す図である。
【発明を実施するための形態】
【0017】
以下に、本発明にかかる運転監視システムの実施の形態を図面に基づいて詳細に説明する。
【0018】
なお、以下の各実施の形態における説明および各図において、同一ないしは同様の構成部分には同一ないしは同様の符号を付する。また、本発明の要旨の説明に不要な詳細な構成および従来技術等についてはその説明の一部を省略する。
【0019】
実施の形態1.
まず、本実施の形態における運転監視システムの構成について説明する。
【0020】
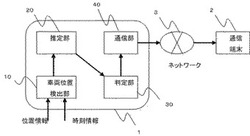
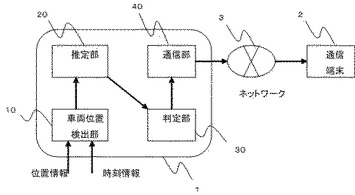
図1は、本実施の形態にかかる運転監視システムを示す概要図である。
図において、1は自動車(監視対象車両)、2は通信端末、3は通信ネットワーク、10は車両位置検出部、20は推定部、30は判定部、40は通信部を示す。また、図中の矢印は情報、各種信号などの流れを示す。
【0021】
車両位置検出部10、推定部20、判定部30、通信部40は自動車1に搭載される。
【0022】
車両位置検出部10は、自動車1の最新または現在の位置、及びその位置における時刻の情報を取得する。各情報の取得は、車両位置検出部10の外部、例えばGPS(GLOBAL Positioning System)装置、時計などから各情報を入手する。また、車両位置検出部10は、取得した情報を、推定部20に出力する。
【0023】
情報の取得は(1)自動車の走行状態(走行、停車など)によらず常時取得する、(2)推定部の指示に基づき取得を開始および停止する、など各種想定が可能である。本実施の形態では常時取得する場合を想定して説明する。
【0024】
なお、車両位置検出部10に上記GPSの機能を有するなどして、車両位置検出部10自体が自動車1の位置及び時刻を測定するようにしてもよい。
【0025】
推定部20は、車両位置検出部10において取得した自動車1の最新(または現在)の位置及びその位置における時刻の情報を入力し、自動車1の走行履歴として、順次、情報を推定部20内の図示しない記憶手段へ記憶する。
【0026】
また、推定部20は、上記走行履歴をもとに、自動車1の走行履歴の特徴を抽出し、自動車1の走行パターン(類型)を自動的に推定するとともに、推定された走行パターンを図示しない記憶手段へ記憶する。推定するパターンは監視目的に応じて各種設定可能であり、また推定または記憶するパターンの数は1つであっても複数であってもよい。
【0027】
本実施の形態において推定部20は、位置および時刻に関係する走行パターンを推定する。また、走行履歴の例については図3を用いて、走行パターンの例については図4及び図5を用いて後述する。
【0028】
また、推定部20は、入力した最新または現在の位置の情報及びその位置における時刻の情報と、推定した走行パターンの情報とを、判定部30に出力する。
【0029】
判定部30は、推定部20から入力した自動車の位置及び時刻の情報をもとに、自動車の最新または現在の走行状態を認識し、前記最新または現在の走行状態が過去の走行履歴から推定した走行パターンと対比して、走行パターンと乖離(合致)した走行状態かどうかを判定する。
【0030】
また、判定部30は、上記判定の結果をもとに通信端末2へ通知を行なうかを判断し、判断結果の情報と通知動作の要否の情報を通信部40へ出力する。
【0031】
以下の説明においては、走行パターンと乖離した走行状態にあるかどうかを判定し、乖離している場合に通信端末2に通知する場合の例を説明する。
【0032】
通信部40は、判定部30から入力した要否の情報をもとに、判定結果を、通知メッセージとして通信ネットワーク2を介し通信端末2に向けて送信する。
【0033】
通信端末2としては、例えば携帯電話、パーソナルコンピュータ、PDAといった端末で通信機能を有するものが使用可能である。なお、通信部40から通信端末2への通信は、ネットワーク上のサーバ等を介して行なうことも可能である。
【0034】
次に、本実施の形態の運転監視システムの動作を説明する。
【0035】
まず、車両位置検出部10は、例えばGPSや時計等からの情報を元に、最新または現在の自動車1の位置及び時刻を検出し、検出結果の情報を推定部20へ出力する。検出および出力は、例えば(1)固定時間間隔で行なう、(2)可変時間間隔で行なう、(3)固定時間間隔と可変時間間隔の組合せで行なう、(4)監視システム内の他の構成要素の制御に従って行なう、(5)自動車の走行状態(走行、停車など)に応じて異なる設定で行なう、(6)走行パターンの推定前と推定後で異なる設定で行なう、(7)検出および出力を別々のタイミング設定で行なう、(8)など、推定部20における推定動作や通信部40における通信動作と独立にあるいは動作に応じて各種のタイミング設定が適用可能である。
【0036】
次に、推定部20は、走行履歴をもとに自動車1の走行パターンの推定動作を行うとともに、推定された走行パターンを記憶する。
【0037】
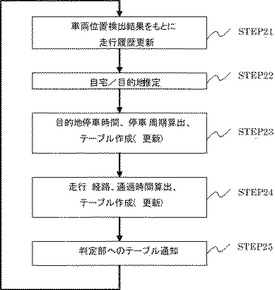
図2は、本実施の形態にかかる運転監視システムの推定部20における動作フローを示す図である。
【0038】
まず、推定部20は、車両位置検出部10から入力した最新または現在の位置及び時刻の情報を、走行履歴の追加分として記憶手段に記憶し、これまでの走行により記憶された走行履歴の情報を更新する。(STEP21)
【0039】
図3は、本実施の形態にかかる走行履歴の情報を示す図である。
図においては、走行履歴の情報として、走行位置(緯度、経度)、停車開始日時、停車終了日時の3つが規定されている。また、停車開始日時および停車終了日時が1分の精度で記憶されているのがわかる。なお、本発明において「走行」の語は、停車状態も含むものとする。
【0040】
停車開始日時および停車終了日時は、例えば、自動車1の位置の無変化時間を、推定動作および監視動作に必要な精度で決まる時間単位で計算することにより求める。
【0041】
なお、走行履歴の情報としては、位置と時刻の組合せ、あるいは上記走行位置(緯度、経度)、停車開始日時、停車終了日時のうちの一部または全部との組合せ、など各種の規定方法が可能である。
【0042】
また、図においてはテーブル形式で示しているが特に限定されない。
【0043】
次に、推定部20は、走行履歴の情報から、走行パターンとして、自動車1のドライバーの生活拠点である「自宅」と、自動車1の走行先である「目的地」とを推定する。(STEP22)
さらに、新たに自宅または目的地が推定された場合は、推定した目的地における停車時間、停車周期を推定し、新たな走行パターンとして、図4に示すテーブルを作成または更新し記憶する。(STEP23)
一方、自宅または目的地が推定されない場合は、テーブルは作成されないか、更新されずそのままとする。
【0044】
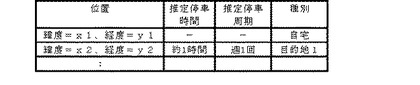
図4は、本実施の形態にかかる自宅と目的地の推定結果を示す図である。
図においては、自宅と、1つめの目的地である目的地1とが、走行パターンとして示されている。また、自宅と目的地1に関する情報として、位置情報(緯度、経度)、推定停車時間、推定停車周期が示されている。
【0045】
図4に示す例では、緯度=x1、経度=y1が「自宅」として推定されているのがわかる。
【0046】
自宅の推定方法としては、監視システムの最初の立上げ時、または、走行履歴の情報が推定動作に必要な量にまで蓄積されるまでは、例えば、監視システムの立ち上げ時に車両位置検出部10が(1)最初に検出した位置、(2)走行開始地点の位置、(3)最初に所定時間以上停車した位置、など、各種の方法が適用可能である。
【0047】
また、走行履歴が蓄積されてきた場合は、例えば走行履歴として図3に示す位置、停車開始日時、停車終了日時を蓄積した場合、(1)走行履歴の中で日を跨いで最も長時間停車している位置を求めその位置を自宅とする、(2)最も頻繁に長時間停車している位置を求めその位置を自宅とする、(3)一連の走行において走行開始時と走行終了時の位置が重なる場合の位置、など各種の推定方法が適用可能である。
【0048】
一方、目的地は日常的にドライバーが通う場所であると考えることができるので、目的地の推定方法としては、例えば(1)定期的に同じ場所に行き所定時間停車する位置、(2)走行パターンとして自宅または既に推定されている別の目的地との間で往復の走行経路が推定でき所定時間停車する位置、など各種の推定方法が可能である。
【0049】
図4に示す例では、緯度=x2、経度=y2の地点に週に1回の頻度で停車していることから、目的地の1つであると判断でき、推定部20はその地点を目的地1として推定したことがわかる。
【0050】
なお、図4においては、自宅の場合は停車時間と停車周期は記録しないが、目的地の場合は停車時間や停車周期を記録するようにしている。これにより記憶する情報の量を低減できる。
【0051】
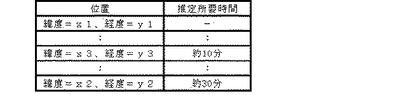
次に、推定部20は、自宅と目的地、あるいは目的地間、における走行経路と走行に必要な所要時間を推定し、新たな走行経路が推定された場合は、その走行経路と所要時間とを新たな走行パターンであるとしてテーブルを更新するか、別途テーブルを作成する。一方、新たに推定されない場合は、テーブルはそのままとする。(STEP24)
【0052】
走行パターンとして、例えば、自宅と目的地、または異なる目的地同士、で区別された走行経路と所要時間を推定する。
【0053】
例えば図3に示す走行履歴のうち11月2日の履歴を見ると、自宅(緯度=x1、経度=y1)を10:00に出発し、途中の地点または別の目的地(緯度=x3、経度=y3)を10:10に経由して目的地1(緯度=x2、経度=y2)に10:30に到着していることがわかる。自宅から途中の地点または別の目的地(緯度=x3、経度=y3)への移動の時間差から走行時間が10分と推定される。また、目的地1(緯度=x2、経度=y2)から自宅への移動の時間差から走行時間が30分と推定される。
【0054】
以上のようにして自宅から目的地への走行経路と所要時間を推定し、走行パターンとして図5に示すようなテーブルを作成又は更新する。
図5は、本実施の形態1にかかる自宅と目的地の間の走行経路の情報を示す図である。
【0055】
図5においては、自宅(緯度=x1、経度=y1)から目的地1(緯度=x2、経度=y2)へ走行する途中に、途中の地点または別の目的地(緯度=x3、経度=y3)を経由して走行するという走行パターンが示され、自宅から各地点までの所要時間が示されているのがわかる。
なお、走行履歴を時間的に逆に見るようにして各走行時間を別途推定してもよい。
【0056】
次に、推定部20は、判定部30へ推定結果を出力する。(STEP25)
判定部30へ出力した後は、走行履歴の更新動作(STEP21)へ移行し、上記処理を繰り返す。
【0057】
なお、図4、図5に示したテーブル以外の走行パターンの形態として、(1)図4と図5の要素を組合せた走行パターン、(2)自宅、目的地、停車時間、停車周期、走行経路、走行の所要時間など、位置、時刻、時間に関するものまたはそれらの組合せの走行パターン、(3)(1)と(2)を組合せた走行パターン、など各種形態が適用可能である。また、推定する走行パターンの種類に応じてテーブルを複数作成するなどしてもよい。
【0058】
また、走行経路の観点から見た走行パターンの種類としては、(1)ある目的地まで自宅から直接走行する場合の経路、(2)ある目的地までに途中の目的地を経由する場合の経路、(3)ある目的地へ走行し別の経路を走行して自宅に戻る経路、(4)自宅と目的地の間ごとに分けた走行パターン、などでもよく、さらに、複数種類のパターンを推定するようにしてもよい。
【0059】
また、時間的な観点から見た走行パターンの種類としては、例えば停車時間などの(1)平均値、(2)最頻値、(3)分散値、(4)周期、(5)走行経路の走行の所要時間、(6)日時または時刻、(7)上記(1)から(7)の組合せ、などでもよく、複数種類のパターンを推定するようにしてもよい。
【0060】
また、走行パターンの推定の手法においては、例えば、平均などの各種統計計算、パラメータフィッティング、いわゆる学習モデルにおける各種推定方法、など各種の方法が適用可能である。
【0061】
また、各処理動作は図に示すように行なっても、並列的に行なってもよい。
【0062】
以上のように、推定部20において、図2に示す走行履歴の更新、走行パターンの推定、走行パターンを表すテーブルの作成または更新という一連の動作が繰り返されることにより、推定部20に走行パターンの情報が蓄積される。
【0063】
以下、図1の説明に戻る。
判定部30は、最新または現在の位置と時刻の情報を少なくとも含む情報を推定部20から入力し、自動車1の最新または現在の走行状態を認識する。
【0064】
自動車1の走行状態としては、例えば、(1)走行している状態、(2)停車している状態、(3)その他の状態、などに分けることができる。
【0065】
また、走行パターンの情報と組み合わせることにより、(1)自宅から目的地へ走行している状態、(2)目的地から自宅へ走行している状態、(3)目的地から別の目的地へ走行している状態、などにさらに分けてもよい。同様に、停車している状態を、(1)自宅で停車している状態、(2)目的地で停車している状態、(3)新たな地点で停車している状態、などにさらに分けてもよい。
【0066】
また、判定部30は、推定結果(ここでは図4、図5に示したテーブルの情報)を推定部20から入力し、自動車1の現在または現在の走行状態が、走行パターンと乖離した走行状態にあるかどうかを判定する。
【0067】
例えば、走行パターンとして約1時間の停車を推定していた目的地1において、1時間を大きく超過して停車していることが判明した場合を考える。
【0068】
この場合、判定部30は、最新または現在の走行状態が、走行パターンと乖離した走行状態にあると判定し、判定結果と、通信端末2への通知の指示とを、通信部40に出力する。
【0069】
また、例えば、最新または現在の走行状態が「自宅を出発し目的地1へ走行している状態」であると推定される場合に、本来自宅を出発してから推定所要時間を経過するまでに到達していなければならない途中の地点または目的地に到達していない場合に、走行パターンと乖離した走行状態にあると判定し、判定結果と通信端末2への通知の指示とを通信部40に出力する。
【0070】
図5に示す走行パターンでは、自宅(緯度=x1、経度=y1)を出発して約10分後に経路上の地点(緯度=x3、経度=y3)に到達していなければならないが、推定所要時間を大きく超過しても到達していない場合、乖離した走行状態と判定する。
【0071】
一方、走行パターンとの乖離を判定するための基準としては、停車時間、通過時刻のほか、走行経路の乖離を監視対象とすることができる。
【0072】
例えば、図5に示されたような走行経路を通らず、別の位置における走行を認識した場合に、走行パターンと乖離した走行状態にあると判定する。
【0073】
なお、乖離しているかどうかの判定基準としては、(1)走行経路の一部における乖離、(2)経路の全部の乖離、(3)目的地までの途中の経路における乖離、(4)最新の位置における乖離、など各種の判定基準が適用可能であり、また、(4)単独の基準で判定する、(5)複数の基準の各々に関し判定する、(6)複数の基準の組合せに対し判定する、(7)単独の基準と組み合わせた基準との場合に対し各々判定する、(8)上記(1)〜(7)の組合せ、など各種の判定基準を適用可能である。
【0074】
例えば(1)の場合としては、途中の地点まで走行パターンに従っていたがその後の走行における位置が走行パターンから乖離した場合が考えられる。
【0075】
次に、通信部40は、判定部30からの判定結果および通知動作の指示を入力し、通知が必要な場合は、入力した判定結果を表す情報に対し通信ネットワーク3との通信の方式に応じた変調等の加工を行い、通信ネットワーク3経由で所定の通信端末2に対し判定結果を通知する。
【0076】
なお、推定部20における走行パターンの推定において、走行パターンが推定可能になるまでは、走行状態が走行パターンと乖離していると判定した場合でも通信端末2に対し通知をしないようにしてもよい。
【0077】
以上のように、本実施の形態1に示す運転監視システムにおいては、自動車の走行履歴から走行パターンを推定するようにしているので、固定的でない経路を走行する可能性が高い自動車の走行の監視に対応することができる。
【0078】
また、自動車の走行履歴から自動的に走行パターンを推定し、自動車の最新又は現在の走行状態が推定された走行パターンと乖離しているかを判定し、判定結果を所定の通信端末に通知するようにしたので、運転監視システムの通知条件の初期設定・初期登録などにかかる手間が少なくて済む。
【0079】
また、自動的に走行パターンを推定するため、新たに目的地が増えるなど走行パターンに変化が生じた場合においても、通信端末の所有者である見守り者が通知条件をメンテナンスする手間が少なくて済む。
【0080】
また、検出、推定、通知に必要な構成を全て自動車内に備えているので、通信ネットワーク3上の情報のやり取りが少なくて済む。
【0081】
なお、本実施の形態においては、車両検出部10で検出した最新または現在の位置および時刻の情報を推定部20を介し判定部30へ入力しているが、車両検出部10から直接判定部30へ入力するようにしてもよい。
【0082】
また、本実施の形態においては、通知の要否を判定部30から通信部へ出力して通知するようにしているが、判定結果から自動的に通知の要否を通信部で判断して通知するようにするなど、各種の等価的な動作が可能である。
【0083】
また、本各実施の形態においては、図4に示したテーブルは、目的地に関する推定周期を1つの欄で表現しているが、例えば(1)曜日ごと、(2)平日と休日、などに分けて走行パターンを推定するようにしてもよい。これにより、走行パターンの推定精度が向上する。
【0084】
実施の形態2.
以下に、本発明の実施の形態2について説明する。
【0085】
なお、実施の形態1の図と同一または同様の機能を有する構成要素は同一の符号を付し、上記実施の形態1との差異を中心に説明する。
【0086】
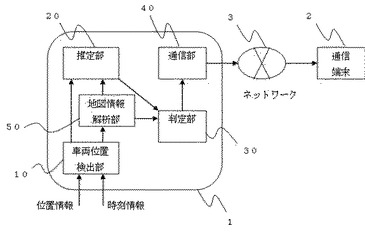
図6は、本実施の形態にかかる運転監視システムを示す概要図である。
実施の形態1の図1との主な違いは、地図情報解析部50が追加されている点である。
【0087】
地図情報解析部50は、例えば商業施設、公共施設、病院、駐車場などの施設の情報を含む地図情報を記憶している。地図情報は、外部から入力して記憶したものでも、予め記憶させたものでもよい。
【0088】
また、地図情報解析部50は、車両位置検出部10が取得した自動車1の最新または現在の位置の情報を入力し、地図情報と比較して比較結果を判定部30に出力する。
【0089】
また、地図情報解析部50は、推定部20に対しても判定結果を出力する。
【0090】
次に、本実施の形態における運転監視システムの動作について説明する。
地図情報解析部40は、商業施設等の施設情報を含む地図情報を、車両位置検出部10から入力した位置情報と比較する。
【0091】
判定部30では、地図情報解析部40から比較結果を入力することで、自動車1の最新又は現在の位置に施設があるかどうかを判定する。
【0092】
例えば、上記実施の形態1で説明した図3、図4、図5において緯度と経度の座標で示される位置が、スーパー、コンビニエンスストア、飲食店、病院等の施設の位置であると判定する。
【0093】
一方、推定部20では、地図情報解析部40から入力した判定結果を用いて走行パターンを推定する。なお、推定部20における推定動作は、実施の形態1における推定動作でもよく、地図情報解析部50からの判定結果を用いることは本実施の形態において必須ではない。
【0094】
判定部30では、自動車1の走行状態と走行パターンとの乖離について判定する際に、自動車1が走行パターンと異なる位置において長時間停車状態にあると認識したが、飲食店など何らかの商業施設と一致するとの判定結果が入力されている場合は、ドライバーはその施設に立ち寄っていると考えられ、走行パターンと乖離しているとは判定しない。
【0095】
一方、地図情報解析部40から施設情報と一致するとの判定結果が入力されない場合には、走行パターンと乖離していると判定する。
【0096】
なお、施設情報と一致するとの判定結果が入力された場合に、判定部30から推定部に対し通知を行い、推定部20における新たな目的地の推定に利用してもよい。
【0097】
以上のように、本実施の形態の運転監視システムにおいては、地図情報を活用する事で、自動車がある施設で停車しているかどうかを判断できるので、自動車の走行状態と走行パターンとの乖離についての誤判定や不要な通知を減らすことができる。
【0098】
なお、本実施の形態では、図6において、地図情報解析部50から推定部20に判定結果を出力しているが、地図情報そのものを出力するなどしてもよい。
【0099】
また、推定部20における走行パターンの推定の際に、位置座標(X,Y)の代わりや地図情報(例えば商業施設名)を用いるようにしてもよい。
【0100】
また、判定部30において、走行パターンとの乖離が所定の範囲内かどうかを判定する際に、目的地の種別を識別することにより、種別に応じて判定基準を切り替えてもよい。例えばスーパーや飲食店等の滞在時間はばらつきが大きいと考えられるからである。
【0101】
また、上記ばらつきを推定部20に通知し、走行パターンに用いてもよく、それにより推定精度が向上する。
【0102】
また、走行パターンとの乖離の判定は施設情報の有無に関わらず同じ基準で実施した上で、施設情報が得られる場合には、通信端末2への通知の際に当該施設情報を通知するようにしてもよい。
【0103】
これにより、通信端末2のユーザー(または遠隔地の見守り者)が、自動車1の走行状態がドライバーの日常的な生活行動の範疇において生じたものであるかどうかを容易に判断することができる。
【0104】
実施の形態3.
以下に、本発明の実施の形態3について説明する。
【0105】
なお、実施の形態1の図と同一または同様の機能を有する構成要素は同一の符号を付し、上記実施の形態1との差異を中心に説明する。
【0106】
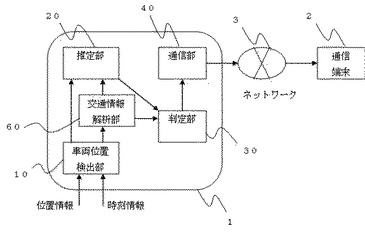
図7は、本実施の形態にかかる運転監視システムを示す概要図である。
実施の形態1の図1との主な違いは、交通情報解析部60が追加されている点である。
【0107】
交通報解析部60は、交通報解析部60の外部より渋滞情報、工事情報といった交通情報を取得とする。取得方法としては、例えば(1)VICS(Vehicle Information and Communication)等でビーコンやFM多重等により提供されているものを受信する、(2)民営のサービス情報を受信する、など各種の方法が適用可能である。
【0108】
また、交通報解析部60は、自動車1の最新または現在の位置および時刻の情報を車両位置検出部10から入力し、上記渋滞や工事が自動車1の位置及び時刻と合致するかどうかを判定し、判定部30へ判定結果を出力する。
【0109】
判定部30は、交通情報解析部60から「交通情報と合致する」との判断結果を入力した場合は、自動車1の走行状態が走行パターンと乖離していても、判定結果としては、乖離は生じていないとする。
【0110】
また、交通情報解析部60は、推定部20に対しても判定結果を出力する。
【0111】
推定部20は、交通情報解析部6からの判定結果を用いて走行パターンを推定する。
【0112】
なお、交通情報解析部6からの判定結果の入力及び推定部20における判定結果を用いた走行パターンの推定は、上記実施の形態1に記載の推定方法でもよく、本実施の形態において必須ではない。
【0113】
以上のように、本実施の形態の運転監視システムにおいては、交通情報を考慮して自動車の走行状態が走行パターンと乖離しているかを判定しているので、渋滞や工事に伴い走行経路や所要時間が変わった場合に、通信端末に対する不必要な通知を低減することができる。
【0114】
また、走行パターンの推定において交通情報を考慮した判定結果を用いることで、渋滞による遅れといった例外的な走行履歴を除外して走行パターンを推定することができるので、推定精度が向上する。
【0115】
実施の形態4.
以下に、本発明の実施の形態4について説明する。
【0116】
なお、実施の形態1の図と同一または同様の機能を有する構成要素は同一の符号を付し、上記実施の形態1との差異を中心に説明する。
【0117】
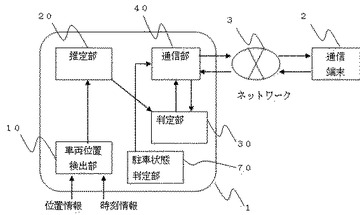
図8は、本実施の形態にかかる運転監視システムを示す概要図である。
実施の形態1の図1との主な違いは、通信部40と通信端末2との間で双方向の通信(情報伝送または通知)が可能となるよう通信端末2、通信ネットワーク3、通信部40、判定部30が構成されている点と、駐車状態判定部70が追加されている点である。
【0118】
駐車場状態判定部70は、自動車1が駐車状態にあるかどうかを判定し、判定結果を通信部に出力する。
【0119】
次に、本実施の形態における運転監視システムの動作について説明する。
ここでは、通信部40が判定部30における判定結果を通信端末2に通知した後に、通信端末2のユーザーまたは遠隔地の見守り者が、通知された内容をもとに様々な行動を起こす場合を想定する。
【0120】
例えば、自動車1の走行状態が走行パターンと乖離しているとの判定結果を通知されたとしても、ドライバーの行動や予定を通信端末2のユーザーまたは遠隔地の見守り者が予め知らされている場合は、走行パターンと異なる位置を走行していても問題があるとは判断せず、通知を無視することが想定される。
【0121】
このような状況に対応するため、通信部40は、通知を受信した通信端末2から送信される応答情報を受信する機能と、通信端末2からの応答情報を、通信部40を経由して判定部30に通知する機能を有する。
【0122】
判定部30は、自動車1の走行状態が走行パターンから乖離しているとの判定結果を通信端末2に対し所定回数通知したにも関わらず、通信端末2から応答がない場合には、通信端末2のユーザーまたは遠隔地の見守り者が問題視していないと判断し、それ以降の通知は行わないよう通信部40に対し指示する。
【0123】
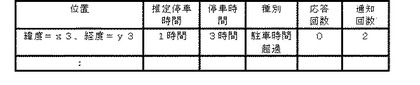
図9は、本実施の形態の通知及び応答の情報を示す図である。
【0124】
具体的には、例えば目的地における停車時間が推定停車時間を大幅に超過している場合に、判定部30は、「走行パターンから乖離している」と判定して通知を行う一方で、図9のテーブルを作成し、通知や応答の回数を記憶する。
【0125】
そして、所定回数の通知に対して応答が得られない場合、通知回数に通知の無効(まはたは不要)を表すカウント値を設定する。
【0126】
判定部30は、一旦「乖離している」と判定した場合でも、通知の指示を行なう前にテーブル中の通知回数の情報を参照し、無効値なら通知を行わないようにする。一方、有効な値ならその値をインクリメントして通知を実施するよう通信部へ指示する。
【0127】
また例えば、通信端末2のユーザーまたは遠隔地の見守り者が、通知があってもそれを問題視していないという意思を表示する手段として、通知を無視する(または応答情報を送信しない)という方法以外に、例えば応答情報の中に明示的に示す場合を想定する。
【0128】
このような状況に対応するため、判定部30は、通信端末2からの応答情報を通信部40を介して入力すると、図9の応答回数のカウント値とは無関係に、通知回数の値を無効値に設定し、以降の通信端末2への通知を行わないようにする。
【0129】
また例えば、通信端末2に対し「走行パターンから乖離している」との判定結果が通知された場合に、通信端末2のユーザーまたは遠隔地の見守り者が、自動車1のドライバーに対し状況の確認のための問合せ等をしようとすることが想定される。
【0130】
その際の一般的な連絡手段として携帯電話等による通話が考えられる。
しかし、走行中のドライバーは通話できないことは当然として、さらに、電話の着信があること自体が安全運転に支障をきたす可能性がある。
【0131】
このよう状況に対応するため、駐車状態判定部70は、例えば自動車1のパーキングブレーキに設置した図示しないセンサからのパーキングブレーキの状態を示す信号、あるいは駐車状態を検出するために使用可能なその他の信号や情報、をもとに自動車1が停車状態にあるか駐車状態にあるかを判定する。
【0132】
なお、確実に駐車状態にあると判断するためには、少なくともパーキングブレーキの信号を使用することが望ましい。
【0133】
駐車場状態判定部70は、自動車1が駐車状態であると判定した場合に、「自動車1のドライバーに対し通話等が可能な状態である」ことを表す情報を、通信部40を介して通信端末2に通知する。
【0134】
以上のように、本実施の形態では、判定結果の通知に対して通信端末のユーザーまたは遠隔地の見守り者が「問題視していない」と判断していると想定し、以後の同一の通知を行わないようにすることができる。
【0135】
これにより、同一の通知が多数行なわれることで他の重要な通知などが見落とされるリスクを低減することができる。
【0136】
また、本実施の形態では、自動車1が駐車状態にあるかどうかを判定しその判定結果をもとに通信端末2に対し通知するようにしたので、通知された通信端末2のユーザーまたは遠隔地の見守り者が自動車1のドライバーに電話等で確認をとりたい場合に、ドライバーが安全に通話等が可能な状態にあることを確認したうえで電話等を行うことが可能になる。
【0137】
なお、本実施の形態においては、走行状態の判定結果と、通話等が可能な状態にあるかどうかの判定結果とを、通信端末2に対し別々に通知するようにしているが、同時に通知してもよく、また、1つの通知情報としてまとめて通知するようにしてもよい。
【0138】
また、駐車状態にあるかどうかなどの自動車1の走行状態の情報を、単独でまたは上記情報と組合せて、通信端末2に通知するようにしてもよい。
【0139】
さらに、上記各実施の形態においては、自動車1の位置を緯度と経度とを用いて示しているが、位置の表現方法、精度は図に示したものに限定されない。
【0140】
また、上記各実施の形態において、位置を示す値(X、Y)としては、(1)推定または判定のマージンを考慮した値、(2)例えば商業施設などでは地図上の位置とその施設の駐車場の位置が異なる場合が考えられることから、所定の範囲の領域やその施設を代表する位置の値、などであってもよい。
【0141】
また、上記各実施の形態において、運転監視システムを、車両位置検出部10、推定部20、判定部30、通信部40のみを用いて説明しているが、自動車1、通信端末2、通信ネットワーク3などの他の構成要素をさらに含んでもよい。
【0142】
また、上記各実施の形態において、走行中の渋滞などによる位置の無変化状態と駐車状態とを区別するようにしてもよく、そのために例えば自動車1のパーキングブレーキの状態を車両位置検出部10または判定部30に入力するようにしても良い。
【0143】
また、上記各実施の形態において、位置や時刻の情報の取得、あるいは地図情報の取得・解析は、既存のカーナビゲーション装置が有する機能であることから、これらの情報をカーナビゲーション装置から取得するようにしてもよい。
【0144】
また、上記カーナビと連携する場合には、地図上の交差点等の特徴点を取得し、その特徴点ごとの通過時間、または滞留時間を記録するように走行パターンを推定しても良い。
【0145】
また、上記各実施の形態において、実際の停車時間が推定停車時間と乖離しており、その時間差が「走行状態と走行パターンとが乖離している状態」と判定するために誤差判定用のマージンを設定する場合、停車時間のばらつきに応じたマージンの値がつけられるようにしてもよい。
【0146】
また、上記各実施の形態において、運転監視システムの実際の運用においては、推定した目的地のテーブルへの追加だけでなく、推定した目的地を削除する機能を備えてもよい。
【0147】
例えば、定期的に、一定期間通っていない目的地、または一定期間通過していない経由地を抽出し、それを削除する機能を。これにより、長らく行っていない目的地への走行を、走行パターンと乖離していると判定することが可能となる。
【0148】
また、上記各実施の形態において、走行パターンとの乖離の判定において、自動車1の位置、時刻、時間と異なる情報を加味してもよい。
【0149】
例えば、推定部20あるいは判定部30において、自動車1の速度、加速または減速といった速度変化量等の状態を、車内のネットワークであるCAN(Control Area Network)を通じて取得し、例えばこれらの値が一定のしきい値を超えるかどうかをパラメータあるいは判定要素として用い、走行状態または走行範囲に大きな乖離が無くても、走行パターンと乖離していると判定するようにしてもよい。
【0150】
また、上記各実施の形態において、自動車1の周囲の距離を測るセンサー等を搭載し、それらのセンサーにより、他の自動車やバイク、歩行者、壁、ガードレール、電信柱などの前後左右の障害物との距離情報を取得し、推定あるいは判定に用いてもよい。
【0151】
また、上記各実施の形態において、走行パターンが天候により変化することを考慮し、例えば、ワイパーやフォグランプ、エアコンの稼動状態、または車内および外気温のセンサー値、等の車内のネットワークから得られる天候と相関のあるパラメータを抽出し、推定あるいは判定に用いてもよい。
【0152】
これにより、例えば雨天の際の目的地での長時間の停車や、目的地までの所要時間の推定時間との乖離を検出した際には、判定部30における判定の判定基準を緩めるといったことが可能となる。
【0153】
また、上記各実施の形態においては、推定部20は、車両位置検出部10において取得した自動車1の最新の位置及びその位置における時刻の情報を入力し、自動車1の走行履歴として情報を記憶しているが、例えば入力後の情報を間引いて記憶するなど、実施の形態に限定されない。
【0154】
また、上記各実施の形態においては、判定部30において自動車1の最新または現在の走行状態と走行パターンとを比較し走行パターンと「乖離しているか」を判定しているが、自動車1の最新(または現在)の走行状態が、例えば買い物行動など日常的な生活行動に基づく走行状態を表す「日常状態」かどうか、あるいは、非日常的な生活行動にもとづく走行状態を表す「非日常状態」かどうかを判定するようにしてもよい。
【0155】
例えば、自動車1の走行中の位置が走行パターンから乖離しており、かつ、通知が必要な場合を、「非日常状態」と看做し、その場合に「非日常状態である」と通知するようにすることができる。
【0156】
これにより、自動車の走行の背景にあるドライバーの行動を考慮した通知を行なうことができる。
【0157】
また、上記各実施の形態においては、判定部30において自動車1の最新または現在の走行状態と走行パターンとを比較し走行パターンと「乖離している」と判定した場合に通知するようにしているが、(1)「合致している」場合に通知する、(2)「乖離していない」場合に通知する、(3)「合致していない」場合に通知する、(4)上記各種の場合を1つ以上組合せた通知状件にする、など監視の目的に応じて各種の変形が可能である。
【0158】
また、上記各実施の形態においては、(1)乖離しているかどうかと通知の要否を別々に判定する、(2)最終的に通知が必要かどうかのみを判定する、(3)通知が必要な乖離かどうかを判定するなど、各種の判定方法を適用することができる。
【0159】
また、乖離している状態における乖離の程度または過去からの状態の変化を考慮し、乖離の程度が大きくなる場合に通知を行い、程度が小さくなる場合には通知を行なわないようにしてもよい。
また、自動車の走行状態として、(1)認識する最新または現在の走行状態に繋がる過去の走行状態の情報、(2)認識した最新または現在の走行状態から予想される将来に走行状態、などを組み合わせてもよい。
【0160】
また、上記各実施の形態において、各図は、構成、構造、機能、手段、動作を分かりやすく説明するためのものであり、本発明の運転監視システムの実装においては、図に記載した特定の構成および名称に依存しない。従って、例えば図に示した1つまたは複数の「・・・部」は発明の実施のための手段と看做すことができ「・・・手段」と置き換えることが可能である。同様に、図に示した1つまたは複数の「・・・部」を「・・・機能エンティティ」と置き換えることができる。
【0161】
また、各部の配置関係、数、相互関係は、図に記載の構成や構成要素の動作の分割範囲に限定されず、重複やさらなる分割も可能である。
【0162】
また、各図における構成要素の実装及び動作は、(1)CPU及びメモリなどのハードウェアのみ、(2)ソフトウェアのみ、(3)ハードウェアとソフトウェアの混合など、各種の実施形態が可能である。
【0163】
さらに、上記各実施の形態は例示であり、本発明をその範囲内に限定するためのものではない。上記各実施の形態の組合せを含め、当該技術分野の通常の知識をもつ者により本発明の技術的思想を外れない範囲内で各部の配置、位置関係、動作条件など種々の変形が可能である。
【符号の説明】
【0164】
1 自動車(監視対象車両)
2 通信端末
3 通信ネットワーク
10 車両位置検出部
20 推定部
30 判定部
40 通信部
50 地図情報解析部
60 交通情報解析部
70 駐車状態判定部
【技術分野】
【0001】
この発明は、自動車の位置と時間情報を取得してその走行状態を監視する運転監視システムに関する。
【背景技術】
【0002】
近年、遠隔地にいる家族や親戚等が日々安全に行動しているかを見守りたいというニーズが増えてきており、そのニーズにこたえるものとして、例えば公共交通機関等を利用して通学する子供に異常が発生していないか等を携帯電話のGPS機能等を用いて取得する監視システムが存在する。(例えば、特許文献1参照。)
【0003】
この監視システムでは、移動経路を監視システムに予め設定し、子供には携帯端末を持たせている。そして、予め定めた移動経路からの逸脱に加え、移動方向や移動速度をも監視対象とすることで、間違った列車に乗ったり不審者に車で連れ去られたりするといった異常状態の検出を可能としている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−252798号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一方、近年の高齢化社会においては、高齢者の生活の見守りについても重要となっており、例えば一人暮らしの高齢者の住宅内に設置したセンサーからの情報を元に在宅状態等を把握し、遠隔地に離れた家族にメール等で通知する、あるいは状態応じてガードマンが急行するといったサービスが存在する。
【0006】
高齢者の生活においては家庭内だけでなく、屋外での移動についても危険を伴う場合があり、特に身体能力、判断能力が低下した高齢者ドライバーの運転による事故は社会問題化している。
【0007】
特に、交通の便が良くない地方に住む一人暮らしの高齢者は、自身の運転技術に不安を覚えながらも通院や買い物のためにやむを得ず運転を続ける場合もあり、問題の解決を困難にしている。
【0008】
高齢者ドライバーの日常的な生活における行動としては、例えば、勤務場所、複数のスーパー、飲食店、病院、友人・知人宅等への定期的な移動が考えられ、一般的なドライバーに比べて走行範囲は限られるものの、児童の通学に比べると走行パターンのばらつきが多い。
【0009】
しかしながら、上記特許文献1の監視システムは、前記の通り公共交通機関等を利用して移動する児童等の見守りを対象とし、通学時間帯において特定の通学ルートを通っているかなど限定された移動パターンからの逸脱の監視に特化している。
【0010】
このため、上記特許文献1のように単に予め固定的に設定した経路(場所、時間)からの逸脱を監視する方法だけでは、高齢者ドライバーの日常的な行動や走行範囲からの逸脱の監視には十分でないというという課題があった。
【0011】
本発明は、上記の課題を解決するためになされたものであって、自動車での走行に対応可能な運転監視システムを提供することにある。
【課題を解決するための手段】
【0012】
本発明にかかる運転監視システムは、自動車の走行状態と、自動車の走行履歴から(自動的に)推定した走行パターンとを対比して、対比した結果を例えば遠隔地にある所定の通信端末に通知することを特徴とする。
【0013】
具体的には、自動車に搭載する運転監視システムであって、自動車の走行位置および走行時刻を検出する車両位置検出部と、車両位置検出部が検出した走行位置および走行時刻の情報を走行履歴情報として記憶する記憶手段を有し、走行履歴情報をもとに自動車の走行パターンを推定する推定部と、車両位置検出部が取得した走行位置および走行時刻の情報をもとに自動車の走行状態を認識し、認識した自動車の走行状態が推定部で推定した走行パターンと乖離(合致)した走行状態かどうかを判断する判定部と、判定部の判断結果を所定の通信端末に対し送信する通信部を備えたものである。
【発明の効果】
【0014】
この発明によれば、自動車の走行状態と、自動車の走行履歴から(自動的に)推定した走行パターンを対比に用いてその結果を通信端末に通知するように構成したので、移動経路などの監視条件を予め設定あるいは登録するための手間が少なくて済む。
【0015】
また、自動的に走行パターンを推定するため、走行パターンの変化に柔軟に対応することができ、監視条件を修正する手間が少なくて済む。
【図面の簡単な説明】
【0016】
【図1】この発明の実施の形態1にかかる運転監視システムを示す概要図である。
【図2】この発明の実施の形態1にかかる運転監視システムの推定部における動作フローを示す図である。
【図3】この発明の実施の形態1にかかる走行履歴の情報を示す図である。
【図4】この発明の実施の形態1にかかる自宅と目的地の推定結果の情報を示す図である。
【図5】この発明の実施の形態1にかかる自宅と目的地の間の走行経路の情報を示す図である。
【図6】この発明の実施の形態2にかかる運転監視システムを示す概要図である。
【図7】この発明の実施の形態3にかかる運転監視システムを示す概要図である。
【図8】この発明の実施の形態4にかかる運転監視システムを示す概要図である。
【図9】この発明の実施の形態4にかかる通知及び応答の情報を示す図である。
【発明を実施するための形態】
【0017】
以下に、本発明にかかる運転監視システムの実施の形態を図面に基づいて詳細に説明する。
【0018】
なお、以下の各実施の形態における説明および各図において、同一ないしは同様の構成部分には同一ないしは同様の符号を付する。また、本発明の要旨の説明に不要な詳細な構成および従来技術等についてはその説明の一部を省略する。
【0019】
実施の形態1.
まず、本実施の形態における運転監視システムの構成について説明する。
【0020】
図1は、本実施の形態にかかる運転監視システムを示す概要図である。
図において、1は自動車(監視対象車両)、2は通信端末、3は通信ネットワーク、10は車両位置検出部、20は推定部、30は判定部、40は通信部を示す。また、図中の矢印は情報、各種信号などの流れを示す。
【0021】
車両位置検出部10、推定部20、判定部30、通信部40は自動車1に搭載される。
【0022】
車両位置検出部10は、自動車1の最新または現在の位置、及びその位置における時刻の情報を取得する。各情報の取得は、車両位置検出部10の外部、例えばGPS(GLOBAL Positioning System)装置、時計などから各情報を入手する。また、車両位置検出部10は、取得した情報を、推定部20に出力する。
【0023】
情報の取得は(1)自動車の走行状態(走行、停車など)によらず常時取得する、(2)推定部の指示に基づき取得を開始および停止する、など各種想定が可能である。本実施の形態では常時取得する場合を想定して説明する。
【0024】
なお、車両位置検出部10に上記GPSの機能を有するなどして、車両位置検出部10自体が自動車1の位置及び時刻を測定するようにしてもよい。
【0025】
推定部20は、車両位置検出部10において取得した自動車1の最新(または現在)の位置及びその位置における時刻の情報を入力し、自動車1の走行履歴として、順次、情報を推定部20内の図示しない記憶手段へ記憶する。
【0026】
また、推定部20は、上記走行履歴をもとに、自動車1の走行履歴の特徴を抽出し、自動車1の走行パターン(類型)を自動的に推定するとともに、推定された走行パターンを図示しない記憶手段へ記憶する。推定するパターンは監視目的に応じて各種設定可能であり、また推定または記憶するパターンの数は1つであっても複数であってもよい。
【0027】
本実施の形態において推定部20は、位置および時刻に関係する走行パターンを推定する。また、走行履歴の例については図3を用いて、走行パターンの例については図4及び図5を用いて後述する。
【0028】
また、推定部20は、入力した最新または現在の位置の情報及びその位置における時刻の情報と、推定した走行パターンの情報とを、判定部30に出力する。
【0029】
判定部30は、推定部20から入力した自動車の位置及び時刻の情報をもとに、自動車の最新または現在の走行状態を認識し、前記最新または現在の走行状態が過去の走行履歴から推定した走行パターンと対比して、走行パターンと乖離(合致)した走行状態かどうかを判定する。
【0030】
また、判定部30は、上記判定の結果をもとに通信端末2へ通知を行なうかを判断し、判断結果の情報と通知動作の要否の情報を通信部40へ出力する。
【0031】
以下の説明においては、走行パターンと乖離した走行状態にあるかどうかを判定し、乖離している場合に通信端末2に通知する場合の例を説明する。
【0032】
通信部40は、判定部30から入力した要否の情報をもとに、判定結果を、通知メッセージとして通信ネットワーク2を介し通信端末2に向けて送信する。
【0033】
通信端末2としては、例えば携帯電話、パーソナルコンピュータ、PDAといった端末で通信機能を有するものが使用可能である。なお、通信部40から通信端末2への通信は、ネットワーク上のサーバ等を介して行なうことも可能である。
【0034】
次に、本実施の形態の運転監視システムの動作を説明する。
【0035】
まず、車両位置検出部10は、例えばGPSや時計等からの情報を元に、最新または現在の自動車1の位置及び時刻を検出し、検出結果の情報を推定部20へ出力する。検出および出力は、例えば(1)固定時間間隔で行なう、(2)可変時間間隔で行なう、(3)固定時間間隔と可変時間間隔の組合せで行なう、(4)監視システム内の他の構成要素の制御に従って行なう、(5)自動車の走行状態(走行、停車など)に応じて異なる設定で行なう、(6)走行パターンの推定前と推定後で異なる設定で行なう、(7)検出および出力を別々のタイミング設定で行なう、(8)など、推定部20における推定動作や通信部40における通信動作と独立にあるいは動作に応じて各種のタイミング設定が適用可能である。
【0036】
次に、推定部20は、走行履歴をもとに自動車1の走行パターンの推定動作を行うとともに、推定された走行パターンを記憶する。
【0037】
図2は、本実施の形態にかかる運転監視システムの推定部20における動作フローを示す図である。
【0038】
まず、推定部20は、車両位置検出部10から入力した最新または現在の位置及び時刻の情報を、走行履歴の追加分として記憶手段に記憶し、これまでの走行により記憶された走行履歴の情報を更新する。(STEP21)
【0039】
図3は、本実施の形態にかかる走行履歴の情報を示す図である。
図においては、走行履歴の情報として、走行位置(緯度、経度)、停車開始日時、停車終了日時の3つが規定されている。また、停車開始日時および停車終了日時が1分の精度で記憶されているのがわかる。なお、本発明において「走行」の語は、停車状態も含むものとする。
【0040】
停車開始日時および停車終了日時は、例えば、自動車1の位置の無変化時間を、推定動作および監視動作に必要な精度で決まる時間単位で計算することにより求める。
【0041】
なお、走行履歴の情報としては、位置と時刻の組合せ、あるいは上記走行位置(緯度、経度)、停車開始日時、停車終了日時のうちの一部または全部との組合せ、など各種の規定方法が可能である。
【0042】
また、図においてはテーブル形式で示しているが特に限定されない。
【0043】
次に、推定部20は、走行履歴の情報から、走行パターンとして、自動車1のドライバーの生活拠点である「自宅」と、自動車1の走行先である「目的地」とを推定する。(STEP22)
さらに、新たに自宅または目的地が推定された場合は、推定した目的地における停車時間、停車周期を推定し、新たな走行パターンとして、図4に示すテーブルを作成または更新し記憶する。(STEP23)
一方、自宅または目的地が推定されない場合は、テーブルは作成されないか、更新されずそのままとする。
【0044】
図4は、本実施の形態にかかる自宅と目的地の推定結果を示す図である。
図においては、自宅と、1つめの目的地である目的地1とが、走行パターンとして示されている。また、自宅と目的地1に関する情報として、位置情報(緯度、経度)、推定停車時間、推定停車周期が示されている。
【0045】
図4に示す例では、緯度=x1、経度=y1が「自宅」として推定されているのがわかる。
【0046】
自宅の推定方法としては、監視システムの最初の立上げ時、または、走行履歴の情報が推定動作に必要な量にまで蓄積されるまでは、例えば、監視システムの立ち上げ時に車両位置検出部10が(1)最初に検出した位置、(2)走行開始地点の位置、(3)最初に所定時間以上停車した位置、など、各種の方法が適用可能である。
【0047】
また、走行履歴が蓄積されてきた場合は、例えば走行履歴として図3に示す位置、停車開始日時、停車終了日時を蓄積した場合、(1)走行履歴の中で日を跨いで最も長時間停車している位置を求めその位置を自宅とする、(2)最も頻繁に長時間停車している位置を求めその位置を自宅とする、(3)一連の走行において走行開始時と走行終了時の位置が重なる場合の位置、など各種の推定方法が適用可能である。
【0048】
一方、目的地は日常的にドライバーが通う場所であると考えることができるので、目的地の推定方法としては、例えば(1)定期的に同じ場所に行き所定時間停車する位置、(2)走行パターンとして自宅または既に推定されている別の目的地との間で往復の走行経路が推定でき所定時間停車する位置、など各種の推定方法が可能である。
【0049】
図4に示す例では、緯度=x2、経度=y2の地点に週に1回の頻度で停車していることから、目的地の1つであると判断でき、推定部20はその地点を目的地1として推定したことがわかる。
【0050】
なお、図4においては、自宅の場合は停車時間と停車周期は記録しないが、目的地の場合は停車時間や停車周期を記録するようにしている。これにより記憶する情報の量を低減できる。
【0051】
次に、推定部20は、自宅と目的地、あるいは目的地間、における走行経路と走行に必要な所要時間を推定し、新たな走行経路が推定された場合は、その走行経路と所要時間とを新たな走行パターンであるとしてテーブルを更新するか、別途テーブルを作成する。一方、新たに推定されない場合は、テーブルはそのままとする。(STEP24)
【0052】
走行パターンとして、例えば、自宅と目的地、または異なる目的地同士、で区別された走行経路と所要時間を推定する。
【0053】
例えば図3に示す走行履歴のうち11月2日の履歴を見ると、自宅(緯度=x1、経度=y1)を10:00に出発し、途中の地点または別の目的地(緯度=x3、経度=y3)を10:10に経由して目的地1(緯度=x2、経度=y2)に10:30に到着していることがわかる。自宅から途中の地点または別の目的地(緯度=x3、経度=y3)への移動の時間差から走行時間が10分と推定される。また、目的地1(緯度=x2、経度=y2)から自宅への移動の時間差から走行時間が30分と推定される。
【0054】
以上のようにして自宅から目的地への走行経路と所要時間を推定し、走行パターンとして図5に示すようなテーブルを作成又は更新する。
図5は、本実施の形態1にかかる自宅と目的地の間の走行経路の情報を示す図である。
【0055】
図5においては、自宅(緯度=x1、経度=y1)から目的地1(緯度=x2、経度=y2)へ走行する途中に、途中の地点または別の目的地(緯度=x3、経度=y3)を経由して走行するという走行パターンが示され、自宅から各地点までの所要時間が示されているのがわかる。
なお、走行履歴を時間的に逆に見るようにして各走行時間を別途推定してもよい。
【0056】
次に、推定部20は、判定部30へ推定結果を出力する。(STEP25)
判定部30へ出力した後は、走行履歴の更新動作(STEP21)へ移行し、上記処理を繰り返す。
【0057】
なお、図4、図5に示したテーブル以外の走行パターンの形態として、(1)図4と図5の要素を組合せた走行パターン、(2)自宅、目的地、停車時間、停車周期、走行経路、走行の所要時間など、位置、時刻、時間に関するものまたはそれらの組合せの走行パターン、(3)(1)と(2)を組合せた走行パターン、など各種形態が適用可能である。また、推定する走行パターンの種類に応じてテーブルを複数作成するなどしてもよい。
【0058】
また、走行経路の観点から見た走行パターンの種類としては、(1)ある目的地まで自宅から直接走行する場合の経路、(2)ある目的地までに途中の目的地を経由する場合の経路、(3)ある目的地へ走行し別の経路を走行して自宅に戻る経路、(4)自宅と目的地の間ごとに分けた走行パターン、などでもよく、さらに、複数種類のパターンを推定するようにしてもよい。
【0059】
また、時間的な観点から見た走行パターンの種類としては、例えば停車時間などの(1)平均値、(2)最頻値、(3)分散値、(4)周期、(5)走行経路の走行の所要時間、(6)日時または時刻、(7)上記(1)から(7)の組合せ、などでもよく、複数種類のパターンを推定するようにしてもよい。
【0060】
また、走行パターンの推定の手法においては、例えば、平均などの各種統計計算、パラメータフィッティング、いわゆる学習モデルにおける各種推定方法、など各種の方法が適用可能である。
【0061】
また、各処理動作は図に示すように行なっても、並列的に行なってもよい。
【0062】
以上のように、推定部20において、図2に示す走行履歴の更新、走行パターンの推定、走行パターンを表すテーブルの作成または更新という一連の動作が繰り返されることにより、推定部20に走行パターンの情報が蓄積される。
【0063】
以下、図1の説明に戻る。
判定部30は、最新または現在の位置と時刻の情報を少なくとも含む情報を推定部20から入力し、自動車1の最新または現在の走行状態を認識する。
【0064】
自動車1の走行状態としては、例えば、(1)走行している状態、(2)停車している状態、(3)その他の状態、などに分けることができる。
【0065】
また、走行パターンの情報と組み合わせることにより、(1)自宅から目的地へ走行している状態、(2)目的地から自宅へ走行している状態、(3)目的地から別の目的地へ走行している状態、などにさらに分けてもよい。同様に、停車している状態を、(1)自宅で停車している状態、(2)目的地で停車している状態、(3)新たな地点で停車している状態、などにさらに分けてもよい。
【0066】
また、判定部30は、推定結果(ここでは図4、図5に示したテーブルの情報)を推定部20から入力し、自動車1の現在または現在の走行状態が、走行パターンと乖離した走行状態にあるかどうかを判定する。
【0067】
例えば、走行パターンとして約1時間の停車を推定していた目的地1において、1時間を大きく超過して停車していることが判明した場合を考える。
【0068】
この場合、判定部30は、最新または現在の走行状態が、走行パターンと乖離した走行状態にあると判定し、判定結果と、通信端末2への通知の指示とを、通信部40に出力する。
【0069】
また、例えば、最新または現在の走行状態が「自宅を出発し目的地1へ走行している状態」であると推定される場合に、本来自宅を出発してから推定所要時間を経過するまでに到達していなければならない途中の地点または目的地に到達していない場合に、走行パターンと乖離した走行状態にあると判定し、判定結果と通信端末2への通知の指示とを通信部40に出力する。
【0070】
図5に示す走行パターンでは、自宅(緯度=x1、経度=y1)を出発して約10分後に経路上の地点(緯度=x3、経度=y3)に到達していなければならないが、推定所要時間を大きく超過しても到達していない場合、乖離した走行状態と判定する。
【0071】
一方、走行パターンとの乖離を判定するための基準としては、停車時間、通過時刻のほか、走行経路の乖離を監視対象とすることができる。
【0072】
例えば、図5に示されたような走行経路を通らず、別の位置における走行を認識した場合に、走行パターンと乖離した走行状態にあると判定する。
【0073】
なお、乖離しているかどうかの判定基準としては、(1)走行経路の一部における乖離、(2)経路の全部の乖離、(3)目的地までの途中の経路における乖離、(4)最新の位置における乖離、など各種の判定基準が適用可能であり、また、(4)単独の基準で判定する、(5)複数の基準の各々に関し判定する、(6)複数の基準の組合せに対し判定する、(7)単独の基準と組み合わせた基準との場合に対し各々判定する、(8)上記(1)〜(7)の組合せ、など各種の判定基準を適用可能である。
【0074】
例えば(1)の場合としては、途中の地点まで走行パターンに従っていたがその後の走行における位置が走行パターンから乖離した場合が考えられる。
【0075】
次に、通信部40は、判定部30からの判定結果および通知動作の指示を入力し、通知が必要な場合は、入力した判定結果を表す情報に対し通信ネットワーク3との通信の方式に応じた変調等の加工を行い、通信ネットワーク3経由で所定の通信端末2に対し判定結果を通知する。
【0076】
なお、推定部20における走行パターンの推定において、走行パターンが推定可能になるまでは、走行状態が走行パターンと乖離していると判定した場合でも通信端末2に対し通知をしないようにしてもよい。
【0077】
以上のように、本実施の形態1に示す運転監視システムにおいては、自動車の走行履歴から走行パターンを推定するようにしているので、固定的でない経路を走行する可能性が高い自動車の走行の監視に対応することができる。
【0078】
また、自動車の走行履歴から自動的に走行パターンを推定し、自動車の最新又は現在の走行状態が推定された走行パターンと乖離しているかを判定し、判定結果を所定の通信端末に通知するようにしたので、運転監視システムの通知条件の初期設定・初期登録などにかかる手間が少なくて済む。
【0079】
また、自動的に走行パターンを推定するため、新たに目的地が増えるなど走行パターンに変化が生じた場合においても、通信端末の所有者である見守り者が通知条件をメンテナンスする手間が少なくて済む。
【0080】
また、検出、推定、通知に必要な構成を全て自動車内に備えているので、通信ネットワーク3上の情報のやり取りが少なくて済む。
【0081】
なお、本実施の形態においては、車両検出部10で検出した最新または現在の位置および時刻の情報を推定部20を介し判定部30へ入力しているが、車両検出部10から直接判定部30へ入力するようにしてもよい。
【0082】
また、本実施の形態においては、通知の要否を判定部30から通信部へ出力して通知するようにしているが、判定結果から自動的に通知の要否を通信部で判断して通知するようにするなど、各種の等価的な動作が可能である。
【0083】
また、本各実施の形態においては、図4に示したテーブルは、目的地に関する推定周期を1つの欄で表現しているが、例えば(1)曜日ごと、(2)平日と休日、などに分けて走行パターンを推定するようにしてもよい。これにより、走行パターンの推定精度が向上する。
【0084】
実施の形態2.
以下に、本発明の実施の形態2について説明する。
【0085】
なお、実施の形態1の図と同一または同様の機能を有する構成要素は同一の符号を付し、上記実施の形態1との差異を中心に説明する。
【0086】
図6は、本実施の形態にかかる運転監視システムを示す概要図である。
実施の形態1の図1との主な違いは、地図情報解析部50が追加されている点である。
【0087】
地図情報解析部50は、例えば商業施設、公共施設、病院、駐車場などの施設の情報を含む地図情報を記憶している。地図情報は、外部から入力して記憶したものでも、予め記憶させたものでもよい。
【0088】
また、地図情報解析部50は、車両位置検出部10が取得した自動車1の最新または現在の位置の情報を入力し、地図情報と比較して比較結果を判定部30に出力する。
【0089】
また、地図情報解析部50は、推定部20に対しても判定結果を出力する。
【0090】
次に、本実施の形態における運転監視システムの動作について説明する。
地図情報解析部40は、商業施設等の施設情報を含む地図情報を、車両位置検出部10から入力した位置情報と比較する。
【0091】
判定部30では、地図情報解析部40から比較結果を入力することで、自動車1の最新又は現在の位置に施設があるかどうかを判定する。
【0092】
例えば、上記実施の形態1で説明した図3、図4、図5において緯度と経度の座標で示される位置が、スーパー、コンビニエンスストア、飲食店、病院等の施設の位置であると判定する。
【0093】
一方、推定部20では、地図情報解析部40から入力した判定結果を用いて走行パターンを推定する。なお、推定部20における推定動作は、実施の形態1における推定動作でもよく、地図情報解析部50からの判定結果を用いることは本実施の形態において必須ではない。
【0094】
判定部30では、自動車1の走行状態と走行パターンとの乖離について判定する際に、自動車1が走行パターンと異なる位置において長時間停車状態にあると認識したが、飲食店など何らかの商業施設と一致するとの判定結果が入力されている場合は、ドライバーはその施設に立ち寄っていると考えられ、走行パターンと乖離しているとは判定しない。
【0095】
一方、地図情報解析部40から施設情報と一致するとの判定結果が入力されない場合には、走行パターンと乖離していると判定する。
【0096】
なお、施設情報と一致するとの判定結果が入力された場合に、判定部30から推定部に対し通知を行い、推定部20における新たな目的地の推定に利用してもよい。
【0097】
以上のように、本実施の形態の運転監視システムにおいては、地図情報を活用する事で、自動車がある施設で停車しているかどうかを判断できるので、自動車の走行状態と走行パターンとの乖離についての誤判定や不要な通知を減らすことができる。
【0098】
なお、本実施の形態では、図6において、地図情報解析部50から推定部20に判定結果を出力しているが、地図情報そのものを出力するなどしてもよい。
【0099】
また、推定部20における走行パターンの推定の際に、位置座標(X,Y)の代わりや地図情報(例えば商業施設名)を用いるようにしてもよい。
【0100】
また、判定部30において、走行パターンとの乖離が所定の範囲内かどうかを判定する際に、目的地の種別を識別することにより、種別に応じて判定基準を切り替えてもよい。例えばスーパーや飲食店等の滞在時間はばらつきが大きいと考えられるからである。
【0101】
また、上記ばらつきを推定部20に通知し、走行パターンに用いてもよく、それにより推定精度が向上する。
【0102】
また、走行パターンとの乖離の判定は施設情報の有無に関わらず同じ基準で実施した上で、施設情報が得られる場合には、通信端末2への通知の際に当該施設情報を通知するようにしてもよい。
【0103】
これにより、通信端末2のユーザー(または遠隔地の見守り者)が、自動車1の走行状態がドライバーの日常的な生活行動の範疇において生じたものであるかどうかを容易に判断することができる。
【0104】
実施の形態3.
以下に、本発明の実施の形態3について説明する。
【0105】
なお、実施の形態1の図と同一または同様の機能を有する構成要素は同一の符号を付し、上記実施の形態1との差異を中心に説明する。
【0106】
図7は、本実施の形態にかかる運転監視システムを示す概要図である。
実施の形態1の図1との主な違いは、交通情報解析部60が追加されている点である。
【0107】
交通報解析部60は、交通報解析部60の外部より渋滞情報、工事情報といった交通情報を取得とする。取得方法としては、例えば(1)VICS(Vehicle Information and Communication)等でビーコンやFM多重等により提供されているものを受信する、(2)民営のサービス情報を受信する、など各種の方法が適用可能である。
【0108】
また、交通報解析部60は、自動車1の最新または現在の位置および時刻の情報を車両位置検出部10から入力し、上記渋滞や工事が自動車1の位置及び時刻と合致するかどうかを判定し、判定部30へ判定結果を出力する。
【0109】
判定部30は、交通情報解析部60から「交通情報と合致する」との判断結果を入力した場合は、自動車1の走行状態が走行パターンと乖離していても、判定結果としては、乖離は生じていないとする。
【0110】
また、交通情報解析部60は、推定部20に対しても判定結果を出力する。
【0111】
推定部20は、交通情報解析部6からの判定結果を用いて走行パターンを推定する。
【0112】
なお、交通情報解析部6からの判定結果の入力及び推定部20における判定結果を用いた走行パターンの推定は、上記実施の形態1に記載の推定方法でもよく、本実施の形態において必須ではない。
【0113】
以上のように、本実施の形態の運転監視システムにおいては、交通情報を考慮して自動車の走行状態が走行パターンと乖離しているかを判定しているので、渋滞や工事に伴い走行経路や所要時間が変わった場合に、通信端末に対する不必要な通知を低減することができる。
【0114】
また、走行パターンの推定において交通情報を考慮した判定結果を用いることで、渋滞による遅れといった例外的な走行履歴を除外して走行パターンを推定することができるので、推定精度が向上する。
【0115】
実施の形態4.
以下に、本発明の実施の形態4について説明する。
【0116】
なお、実施の形態1の図と同一または同様の機能を有する構成要素は同一の符号を付し、上記実施の形態1との差異を中心に説明する。
【0117】
図8は、本実施の形態にかかる運転監視システムを示す概要図である。
実施の形態1の図1との主な違いは、通信部40と通信端末2との間で双方向の通信(情報伝送または通知)が可能となるよう通信端末2、通信ネットワーク3、通信部40、判定部30が構成されている点と、駐車状態判定部70が追加されている点である。
【0118】
駐車場状態判定部70は、自動車1が駐車状態にあるかどうかを判定し、判定結果を通信部に出力する。
【0119】
次に、本実施の形態における運転監視システムの動作について説明する。
ここでは、通信部40が判定部30における判定結果を通信端末2に通知した後に、通信端末2のユーザーまたは遠隔地の見守り者が、通知された内容をもとに様々な行動を起こす場合を想定する。
【0120】
例えば、自動車1の走行状態が走行パターンと乖離しているとの判定結果を通知されたとしても、ドライバーの行動や予定を通信端末2のユーザーまたは遠隔地の見守り者が予め知らされている場合は、走行パターンと異なる位置を走行していても問題があるとは判断せず、通知を無視することが想定される。
【0121】
このような状況に対応するため、通信部40は、通知を受信した通信端末2から送信される応答情報を受信する機能と、通信端末2からの応答情報を、通信部40を経由して判定部30に通知する機能を有する。
【0122】
判定部30は、自動車1の走行状態が走行パターンから乖離しているとの判定結果を通信端末2に対し所定回数通知したにも関わらず、通信端末2から応答がない場合には、通信端末2のユーザーまたは遠隔地の見守り者が問題視していないと判断し、それ以降の通知は行わないよう通信部40に対し指示する。
【0123】
図9は、本実施の形態の通知及び応答の情報を示す図である。
【0124】
具体的には、例えば目的地における停車時間が推定停車時間を大幅に超過している場合に、判定部30は、「走行パターンから乖離している」と判定して通知を行う一方で、図9のテーブルを作成し、通知や応答の回数を記憶する。
【0125】
そして、所定回数の通知に対して応答が得られない場合、通知回数に通知の無効(まはたは不要)を表すカウント値を設定する。
【0126】
判定部30は、一旦「乖離している」と判定した場合でも、通知の指示を行なう前にテーブル中の通知回数の情報を参照し、無効値なら通知を行わないようにする。一方、有効な値ならその値をインクリメントして通知を実施するよう通信部へ指示する。
【0127】
また例えば、通信端末2のユーザーまたは遠隔地の見守り者が、通知があってもそれを問題視していないという意思を表示する手段として、通知を無視する(または応答情報を送信しない)という方法以外に、例えば応答情報の中に明示的に示す場合を想定する。
【0128】
このような状況に対応するため、判定部30は、通信端末2からの応答情報を通信部40を介して入力すると、図9の応答回数のカウント値とは無関係に、通知回数の値を無効値に設定し、以降の通信端末2への通知を行わないようにする。
【0129】
また例えば、通信端末2に対し「走行パターンから乖離している」との判定結果が通知された場合に、通信端末2のユーザーまたは遠隔地の見守り者が、自動車1のドライバーに対し状況の確認のための問合せ等をしようとすることが想定される。
【0130】
その際の一般的な連絡手段として携帯電話等による通話が考えられる。
しかし、走行中のドライバーは通話できないことは当然として、さらに、電話の着信があること自体が安全運転に支障をきたす可能性がある。
【0131】
このよう状況に対応するため、駐車状態判定部70は、例えば自動車1のパーキングブレーキに設置した図示しないセンサからのパーキングブレーキの状態を示す信号、あるいは駐車状態を検出するために使用可能なその他の信号や情報、をもとに自動車1が停車状態にあるか駐車状態にあるかを判定する。
【0132】
なお、確実に駐車状態にあると判断するためには、少なくともパーキングブレーキの信号を使用することが望ましい。
【0133】
駐車場状態判定部70は、自動車1が駐車状態であると判定した場合に、「自動車1のドライバーに対し通話等が可能な状態である」ことを表す情報を、通信部40を介して通信端末2に通知する。
【0134】
以上のように、本実施の形態では、判定結果の通知に対して通信端末のユーザーまたは遠隔地の見守り者が「問題視していない」と判断していると想定し、以後の同一の通知を行わないようにすることができる。
【0135】
これにより、同一の通知が多数行なわれることで他の重要な通知などが見落とされるリスクを低減することができる。
【0136】
また、本実施の形態では、自動車1が駐車状態にあるかどうかを判定しその判定結果をもとに通信端末2に対し通知するようにしたので、通知された通信端末2のユーザーまたは遠隔地の見守り者が自動車1のドライバーに電話等で確認をとりたい場合に、ドライバーが安全に通話等が可能な状態にあることを確認したうえで電話等を行うことが可能になる。
【0137】
なお、本実施の形態においては、走行状態の判定結果と、通話等が可能な状態にあるかどうかの判定結果とを、通信端末2に対し別々に通知するようにしているが、同時に通知してもよく、また、1つの通知情報としてまとめて通知するようにしてもよい。
【0138】
また、駐車状態にあるかどうかなどの自動車1の走行状態の情報を、単独でまたは上記情報と組合せて、通信端末2に通知するようにしてもよい。
【0139】
さらに、上記各実施の形態においては、自動車1の位置を緯度と経度とを用いて示しているが、位置の表現方法、精度は図に示したものに限定されない。
【0140】
また、上記各実施の形態において、位置を示す値(X、Y)としては、(1)推定または判定のマージンを考慮した値、(2)例えば商業施設などでは地図上の位置とその施設の駐車場の位置が異なる場合が考えられることから、所定の範囲の領域やその施設を代表する位置の値、などであってもよい。
【0141】
また、上記各実施の形態において、運転監視システムを、車両位置検出部10、推定部20、判定部30、通信部40のみを用いて説明しているが、自動車1、通信端末2、通信ネットワーク3などの他の構成要素をさらに含んでもよい。
【0142】
また、上記各実施の形態において、走行中の渋滞などによる位置の無変化状態と駐車状態とを区別するようにしてもよく、そのために例えば自動車1のパーキングブレーキの状態を車両位置検出部10または判定部30に入力するようにしても良い。
【0143】
また、上記各実施の形態において、位置や時刻の情報の取得、あるいは地図情報の取得・解析は、既存のカーナビゲーション装置が有する機能であることから、これらの情報をカーナビゲーション装置から取得するようにしてもよい。
【0144】
また、上記カーナビと連携する場合には、地図上の交差点等の特徴点を取得し、その特徴点ごとの通過時間、または滞留時間を記録するように走行パターンを推定しても良い。
【0145】
また、上記各実施の形態において、実際の停車時間が推定停車時間と乖離しており、その時間差が「走行状態と走行パターンとが乖離している状態」と判定するために誤差判定用のマージンを設定する場合、停車時間のばらつきに応じたマージンの値がつけられるようにしてもよい。
【0146】
また、上記各実施の形態において、運転監視システムの実際の運用においては、推定した目的地のテーブルへの追加だけでなく、推定した目的地を削除する機能を備えてもよい。
【0147】
例えば、定期的に、一定期間通っていない目的地、または一定期間通過していない経由地を抽出し、それを削除する機能を。これにより、長らく行っていない目的地への走行を、走行パターンと乖離していると判定することが可能となる。
【0148】
また、上記各実施の形態において、走行パターンとの乖離の判定において、自動車1の位置、時刻、時間と異なる情報を加味してもよい。
【0149】
例えば、推定部20あるいは判定部30において、自動車1の速度、加速または減速といった速度変化量等の状態を、車内のネットワークであるCAN(Control Area Network)を通じて取得し、例えばこれらの値が一定のしきい値を超えるかどうかをパラメータあるいは判定要素として用い、走行状態または走行範囲に大きな乖離が無くても、走行パターンと乖離していると判定するようにしてもよい。
【0150】
また、上記各実施の形態において、自動車1の周囲の距離を測るセンサー等を搭載し、それらのセンサーにより、他の自動車やバイク、歩行者、壁、ガードレール、電信柱などの前後左右の障害物との距離情報を取得し、推定あるいは判定に用いてもよい。
【0151】
また、上記各実施の形態において、走行パターンが天候により変化することを考慮し、例えば、ワイパーやフォグランプ、エアコンの稼動状態、または車内および外気温のセンサー値、等の車内のネットワークから得られる天候と相関のあるパラメータを抽出し、推定あるいは判定に用いてもよい。
【0152】
これにより、例えば雨天の際の目的地での長時間の停車や、目的地までの所要時間の推定時間との乖離を検出した際には、判定部30における判定の判定基準を緩めるといったことが可能となる。
【0153】
また、上記各実施の形態においては、推定部20は、車両位置検出部10において取得した自動車1の最新の位置及びその位置における時刻の情報を入力し、自動車1の走行履歴として情報を記憶しているが、例えば入力後の情報を間引いて記憶するなど、実施の形態に限定されない。
【0154】
また、上記各実施の形態においては、判定部30において自動車1の最新または現在の走行状態と走行パターンとを比較し走行パターンと「乖離しているか」を判定しているが、自動車1の最新(または現在)の走行状態が、例えば買い物行動など日常的な生活行動に基づく走行状態を表す「日常状態」かどうか、あるいは、非日常的な生活行動にもとづく走行状態を表す「非日常状態」かどうかを判定するようにしてもよい。
【0155】
例えば、自動車1の走行中の位置が走行パターンから乖離しており、かつ、通知が必要な場合を、「非日常状態」と看做し、その場合に「非日常状態である」と通知するようにすることができる。
【0156】
これにより、自動車の走行の背景にあるドライバーの行動を考慮した通知を行なうことができる。
【0157】
また、上記各実施の形態においては、判定部30において自動車1の最新または現在の走行状態と走行パターンとを比較し走行パターンと「乖離している」と判定した場合に通知するようにしているが、(1)「合致している」場合に通知する、(2)「乖離していない」場合に通知する、(3)「合致していない」場合に通知する、(4)上記各種の場合を1つ以上組合せた通知状件にする、など監視の目的に応じて各種の変形が可能である。
【0158】
また、上記各実施の形態においては、(1)乖離しているかどうかと通知の要否を別々に判定する、(2)最終的に通知が必要かどうかのみを判定する、(3)通知が必要な乖離かどうかを判定するなど、各種の判定方法を適用することができる。
【0159】
また、乖離している状態における乖離の程度または過去からの状態の変化を考慮し、乖離の程度が大きくなる場合に通知を行い、程度が小さくなる場合には通知を行なわないようにしてもよい。
また、自動車の走行状態として、(1)認識する最新または現在の走行状態に繋がる過去の走行状態の情報、(2)認識した最新または現在の走行状態から予想される将来に走行状態、などを組み合わせてもよい。
【0160】
また、上記各実施の形態において、各図は、構成、構造、機能、手段、動作を分かりやすく説明するためのものであり、本発明の運転監視システムの実装においては、図に記載した特定の構成および名称に依存しない。従って、例えば図に示した1つまたは複数の「・・・部」は発明の実施のための手段と看做すことができ「・・・手段」と置き換えることが可能である。同様に、図に示した1つまたは複数の「・・・部」を「・・・機能エンティティ」と置き換えることができる。
【0161】
また、各部の配置関係、数、相互関係は、図に記載の構成や構成要素の動作の分割範囲に限定されず、重複やさらなる分割も可能である。
【0162】
また、各図における構成要素の実装及び動作は、(1)CPU及びメモリなどのハードウェアのみ、(2)ソフトウェアのみ、(3)ハードウェアとソフトウェアの混合など、各種の実施形態が可能である。
【0163】
さらに、上記各実施の形態は例示であり、本発明をその範囲内に限定するためのものではない。上記各実施の形態の組合せを含め、当該技術分野の通常の知識をもつ者により本発明の技術的思想を外れない範囲内で各部の配置、位置関係、動作条件など種々の変形が可能である。
【符号の説明】
【0164】
1 自動車(監視対象車両)
2 通信端末
3 通信ネットワーク
10 車両位置検出部
20 推定部
30 判定部
40 通信部
50 地図情報解析部
60 交通情報解析部
70 駐車状態判定部
【特許請求の範囲】
【請求項1】
自動車に搭載する運転監視システムであって、
前記自動車の走行位置および走行時刻を検出する車両位置検出部と、
前記車両位置検出部が検出した前記走行位置および走行時刻の情報を走行履歴情報として記憶する記憶手段を有し、前記走行履歴情報をもとに前記自動車の走行パターンを推定する推定部と、
前記車両位置検出部が検出した前記走行位置および走行時刻の情報をもとに前記自動車の走行状態を認識し、認識した前記走行状態と前記推定部が推定した前記走行パターンとを比較して前記走行状態と前記走行パターンとの乖離を判断する判定部と、
前記判定部の前記判断結果を所定の通信端末に対し送信する通信部と、
を備えたことを特徴とする運転監視システム。
【請求項2】
前記推定部は、
前記走行パターンとして、前記自動車のドライバーの自宅および前記自動車の走行先地点である1以上の目的地を推定する、
ことを特徴とする請求項1に記載の運転監視システム。
【請求項3】
前記推定部は、
前記走行パターンとして、前記自宅と前記1以上の目的地との間の経路、前記自宅と前記1以上の目的地の間の走行所要時間、複数の前記目的地の間の経路、複数の前記目的地の間の走行所要時間、前記自動車の停車時間の少なくとも1つを推定する、
ことを特徴とする請求項2に記載の運転監視システム。
【請求項4】
前記判定部は、
前記走行状態における走行位置と前記走行パターンにおける前記経路とを比較し、
前記走行状態における走行位置と前記走行パターンにおける前記経路とが乖離すると判断した場合に、前記走行状態は前記走行パターンと乖離した走行状態にあると判断する、
ことを特徴とする請求項3に記載の運転監視システム
【請求項5】
前記判定部は、
前記走行状態が停車状態であり、かつ、前記停車状態における停車時間が前記走行パターンにおける前記自動車の停車時間と乖離する場合に、
前記走行状態は前記走行パターンと乖離した走行状態にあると判定する、
ことを特徴とする請求項3または請求項4に記載の運転監視システム。
【請求項6】
施設の情報を含む地図情報を記憶する記憶手段を有し、前記車両位置検出部が取得した前記走行位置と前記記憶手段に記憶した地図情報とを比較する地図情報解析部をさらに備え、
前記判定部は、
前記走行状態が停車状態であり、かつ、前記停車状態における停車時間が前記走行パターンにおける前記自動車の停車時間と乖離する場合において、
前記地図情報解析部における比較結果をもとに前記停車状態における走行位置が前記施設の位置に相当すると判断した場合は、前記走行状態は前記走行パターンと乖離した走行状態にないと判定する、
ことを特徴とする請求項2ないしは請求項5のいずれかに記載の運転監視システム。
【請求項7】
道路の通行可否または渋滞に関する位置および時刻を含む交通情報を取得する情報取得手段を有し、前記車両位置検出部が取得した前記走行位置および前記走行時刻と、前記情報取得手段が取得した前記交通情報とを比較する交通情報解析部をさらに備え、
前記判定部は、
前記走行状態における走行位置と前記走行パターンにおける前記経路とが乖離し、かつ、前記交通情報解析部における比較結果をもとに前記交通情報と前記走行状態における位置および時刻とが合致すると判断した場合、
前記走行状態は前記走行パターンと乖離した走行状態にないと判定する、
ことを特徴とする請求項2ないし請求項6のいずれかに記載の運転監視システム。
【請求項8】
前記通信部は、前記判断結果を送信した後に前記判断結果に対する応答メッセージを前記通信端末から受信する受信機能をさらに備える、
ことを特徴とする請求項1ないし請求項7のいずれかに記載の運転監視システム。
【請求項9】
前記判定部は、
前記通信部における前記応答メッセージの受信の有無を把握し、
同一の前記判断結果の送信を所定回数繰返しても前記応答を受信しない場合、前記判断結果の送信を中止するよう前記通信部へ指示する、
ことを特徴とする請求項8に記載の運転監視システム。
【請求項10】
前記応答メッセージは、前記自動車のドライバーに対し前記通信端末への連絡を要求する情報を含む、
ことを特徴とする請求項8または請求項9に記載の運転監視システム。
【請求項11】
前記自動車の走行状態が駐車状態であるかどうかを判断する駐車状態判定部をさらに備え、
前記判定部は、
受信した前記応答メッセージに前記通信端末への連絡を要求する情報が含まれており、かつ、前記駐車状態判定部の判断結果が駐車状態である場合、
前記自動車のドライバーが連絡可能な状態にあることを示す情報を、前記通信端末に送信する、
ことを特徴とする請求項10に記載の運転監視システム。
【請求項1】
自動車に搭載する運転監視システムであって、
前記自動車の走行位置および走行時刻を検出する車両位置検出部と、
前記車両位置検出部が検出した前記走行位置および走行時刻の情報を走行履歴情報として記憶する記憶手段を有し、前記走行履歴情報をもとに前記自動車の走行パターンを推定する推定部と、
前記車両位置検出部が検出した前記走行位置および走行時刻の情報をもとに前記自動車の走行状態を認識し、認識した前記走行状態と前記推定部が推定した前記走行パターンとを比較して前記走行状態と前記走行パターンとの乖離を判断する判定部と、
前記判定部の前記判断結果を所定の通信端末に対し送信する通信部と、
を備えたことを特徴とする運転監視システム。
【請求項2】
前記推定部は、
前記走行パターンとして、前記自動車のドライバーの自宅および前記自動車の走行先地点である1以上の目的地を推定する、
ことを特徴とする請求項1に記載の運転監視システム。
【請求項3】
前記推定部は、
前記走行パターンとして、前記自宅と前記1以上の目的地との間の経路、前記自宅と前記1以上の目的地の間の走行所要時間、複数の前記目的地の間の経路、複数の前記目的地の間の走行所要時間、前記自動車の停車時間の少なくとも1つを推定する、
ことを特徴とする請求項2に記載の運転監視システム。
【請求項4】
前記判定部は、
前記走行状態における走行位置と前記走行パターンにおける前記経路とを比較し、
前記走行状態における走行位置と前記走行パターンにおける前記経路とが乖離すると判断した場合に、前記走行状態は前記走行パターンと乖離した走行状態にあると判断する、
ことを特徴とする請求項3に記載の運転監視システム
【請求項5】
前記判定部は、
前記走行状態が停車状態であり、かつ、前記停車状態における停車時間が前記走行パターンにおける前記自動車の停車時間と乖離する場合に、
前記走行状態は前記走行パターンと乖離した走行状態にあると判定する、
ことを特徴とする請求項3または請求項4に記載の運転監視システム。
【請求項6】
施設の情報を含む地図情報を記憶する記憶手段を有し、前記車両位置検出部が取得した前記走行位置と前記記憶手段に記憶した地図情報とを比較する地図情報解析部をさらに備え、
前記判定部は、
前記走行状態が停車状態であり、かつ、前記停車状態における停車時間が前記走行パターンにおける前記自動車の停車時間と乖離する場合において、
前記地図情報解析部における比較結果をもとに前記停車状態における走行位置が前記施設の位置に相当すると判断した場合は、前記走行状態は前記走行パターンと乖離した走行状態にないと判定する、
ことを特徴とする請求項2ないしは請求項5のいずれかに記載の運転監視システム。
【請求項7】
道路の通行可否または渋滞に関する位置および時刻を含む交通情報を取得する情報取得手段を有し、前記車両位置検出部が取得した前記走行位置および前記走行時刻と、前記情報取得手段が取得した前記交通情報とを比較する交通情報解析部をさらに備え、
前記判定部は、
前記走行状態における走行位置と前記走行パターンにおける前記経路とが乖離し、かつ、前記交通情報解析部における比較結果をもとに前記交通情報と前記走行状態における位置および時刻とが合致すると判断した場合、
前記走行状態は前記走行パターンと乖離した走行状態にないと判定する、
ことを特徴とする請求項2ないし請求項6のいずれかに記載の運転監視システム。
【請求項8】
前記通信部は、前記判断結果を送信した後に前記判断結果に対する応答メッセージを前記通信端末から受信する受信機能をさらに備える、
ことを特徴とする請求項1ないし請求項7のいずれかに記載の運転監視システム。
【請求項9】
前記判定部は、
前記通信部における前記応答メッセージの受信の有無を把握し、
同一の前記判断結果の送信を所定回数繰返しても前記応答を受信しない場合、前記判断結果の送信を中止するよう前記通信部へ指示する、
ことを特徴とする請求項8に記載の運転監視システム。
【請求項10】
前記応答メッセージは、前記自動車のドライバーに対し前記通信端末への連絡を要求する情報を含む、
ことを特徴とする請求項8または請求項9に記載の運転監視システム。
【請求項11】
前記自動車の走行状態が駐車状態であるかどうかを判断する駐車状態判定部をさらに備え、
前記判定部は、
受信した前記応答メッセージに前記通信端末への連絡を要求する情報が含まれており、かつ、前記駐車状態判定部の判断結果が駐車状態である場合、
前記自動車のドライバーが連絡可能な状態にあることを示す情報を、前記通信端末に送信する、
ことを特徴とする請求項10に記載の運転監視システム。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−174185(P2012−174185A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−38360(P2011−38360)
【出願日】平成23年2月24日(2011.2.24)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月24日(2011.2.24)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]