
運転行為分析警告システム及び方法

【課題】車両の運転過程においてドライバーの運転行為を分析し、ドライバーのそのときの運転行為に対して警告を与える、運転行為分析警告システムを開発すること。
【解決手段】本発明の運転行為分析警告システムは車両の走行過程に用い、ドライバーの運転行為を検出し、且つ前記運転行為に対応する警告信号を提供し、そのうち前記分析警告システムがデータ収集ユニットにより前記車両の外部及び(または)内部の走行データを取得し、内部にアルゴリズムが組み込まれた分析モジュールで分析・演算を行って安全運転信号を生成し、出力ユニットにより出力して前記ドライバーに前記ドライバー自身の前記運転行為が正常運転または異常運転の状態にあるか判断させ、危険運転による傷害を回避することができる。このほか、本発明は同時に運転行為の分析・警告方法も提出する。
【解決手段】本発明の運転行為分析警告システムは車両の走行過程に用い、ドライバーの運転行為を検出し、且つ前記運転行為に対応する警告信号を提供し、そのうち前記分析警告システムがデータ収集ユニットにより前記車両の外部及び(または)内部の走行データを取得し、内部にアルゴリズムが組み込まれた分析モジュールで分析・演算を行って安全運転信号を生成し、出力ユニットにより出力して前記ドライバーに前記ドライバー自身の前記運転行為が正常運転または異常運転の状態にあるか判断させ、危険運転による傷害を回避することができる。このほか、本発明は同時に運転行為の分析・警告方法も提出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は運転行為分析警告システム及び方法に関し、特に車両の外部及び(または)内部で収集した走行データからドライバーが自ら自身の運転行為を判断できるシステム及び方法に関する。
【背景技術】
【0002】
従来、高度道路交通システムの技術分野では、各国が大規模な計画で関連の研究を進めている。中でも、特にドライバーの運転行為を分析して走行の安全を実現するというテーマがあるが、この走行の安全はドライバーの正常な運転行為と異常な運転行為の分析に基づいている。現在市場ではすでにドライバーの運転行為を検出することに関する検出システムの販売が開始されており、検出の方法はドライバーの生理信号(例えば頭部の移動、心拍の変動、ハンドルの移動軌跡、眼部の移動等)の分析を含む。
【0003】
運転行為の状態の分析に関する研究文献のうち、多くが分析信号ソースから分類して2つの大きなカテゴリに区分することができ、1つはドライバーの生理信号及びそれから派生する生理状態を利用する生理信号分析法であり、もう1つがドライバーの走行表現を分析信号として利用する走行表現分析法である。その違いを以下で説明する。
【0004】
上述の生理信号分析法は、ドライバーの行為状態を直接生理信号上に反映させるもので、たとえば運転の疲労の例では、ドライバーがうたたねの徴候を現すと、脳で脳波(electroencephalogram、EEG)の変化が生じる。このほか、ドライバーに注意力分散状態が現れたとき、たとえばナビゲーション装置を使用するときに、視線がナビゲーション装置に移動し、前方の道路状況に注意が向かなくなるなどといった状況では、画像識別技術を使用することで、視線を分析してドライバーの現在の注意力散漫状態を識別することができる。しかしながら、上述の識別技術の実現は非常に困難である。脳波テスト法を例とすると、ドライバーは脳波測定装置を装着して運転したがらない。また、画像識別技術にも困難な点がある。関連文献においては、人の顔及び眼、表情、唇で識別・追跡する識別技術がよく見られるが、人の顔が昼間の走行時光と影によって変化する複雑な環境では、アルゴリズムの堅牢性が大きな試練に直面する。さらに、人の視線の識別を基礎とするシステムは、ドライバーが日差しの強いときにサングラスをかけてしまうと作用しなくなる。これらの生理信号分析法には測定が正確である等の利点があるものの、現実の生活の中でこれらの測定方法を実現することは難しい。
【0005】
さらに、上述の走行表現分析法はドライバーの状態によって生じる運転行為を走行分析の根拠とする。つまり、間接的な方式でそのドライバーの運転状態を判断する。運転の疲労を例とすると、通常運転の表現上では反応時間の増加やハンドル制御の敏捷さ不足などの反応として反映される。しかしながら、このような分析信号の欠点はドライバーの運転行為が通常いずれも定性的に描写され、定量的分析が少なく、定義をドライバーの判断に供することが難しい。
【0006】
このため、本発明の提供するシステム及び方法で、従来技術の欠点を解決する必要がある。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の目的は、車両の運転過程においてドライバーの運転行為を分析し、ドライバーのそのときの運転行為に対して警告を与える、運転行為分析警告システムを提供することにある。
【0008】
本発明の別の目的は、ドライバーの運転行為を分析し、ドライバーが自身の運転行為を自ら判断するために供する、運転行為の分析・警告方法を提供することにある。
【課題を解決するための手段】
【0009】
上述の目的及びその他目的を達するため、本発明の運転行為分析警告システムは、車両の運転過程中にドライバーの運転行為を検出するために用いられ、データ収集ユニット、分析モジュール、出力ユニットを含み、前記データ収集ユニットは前記車両に設置され、且つ前記車両の外部と内部の少なくともいずれか一方に関する走行データを収集し、前記分析モジュールは前記データ収集ユニットに接続され、前記走行データに基づいて安全運転信号を生成し、且つ前記安全運転信号は前記ドライバーの前記運転行為に関連する。前記出力ユニットは前記分析モジュールに接続され、前記安全運転信号を出力して前記ドライバーに提供し、自身の前記運転行為を判断させるために用いられる。
【0010】
上述の目的及びその他目的を達するため、本発明の運転行為の分析・警告方法は、車両の運転過程においてドライバーの運転行為を検出し、前記運転行為に対応する警告信号を提供するために用いられ、(a)前記車両の外部と内部の少なくともいずれか一方の発生する走行データを収集する工程と、続いて(b)前記走行データを分析し、前記運転行為に関する安全運転信号を生成する工程と、(c)示された前記安全運転信号を前記ドライバーに提供してそのときの自身の前記運転行為の状態を判断させる工程とを含む。
【0011】
従来技術と比較して、本発明の運転行為分析警告システム及び方法は、外部の走行データ(例えば前記走行データは車線逸脱警告システム(Lane Departure Warning Systems、LDWS)、前方衝突警告システム(Forward Collision Warning、FCW)、重力センサシステム(accelerometerまたはgravity(G)−sensor)とその他走行システム)、または内部の走行データ(例えばアクセルペダル使用データ、走行速度データ、ブレーキペダル使用データ、燃料消費データ、方向転換データ、方向指示器・その他ライトの使用データ等)が収集した関連走行データを受け取り、分析モジュールで前記走行データを分析し、且つ前記走行データから前記車線逸脱警告システムが受け取った車道の幅、前記車両の側縁と車線境界線の間の距離、前記車両が右側の前記車道に入った回数、前記車両の横方向速度の変化量と前記車両が前記車線境界線を越えた超過量、前記車両と前記車両の前方の車両間の距離と前記ドライバーが前記車両と前記前方の車両間の距離を維持するための反応時間と前記車両の走行速度の変化量等の関連データを取り出し、前記分析モジュール中に組み込まれたアルゴリズム(例えばファジー理論(Fuzzy theory))を備えた決定ユニットを通して上述の走行データを分析し、安全運転信号を生成して、前記安全運転信号をドライバーに提供し、自身の運転行為が正常運転に属するか否かを理解させることができる。
【0012】
一実施例において、本発明の出力する前記安全運転信号は、定量化した方式で表され、対応する複数の警告レンジとして示すことで、迅速に、直接的かつ明確にドライバーに現在の運転状態(例えば安全運転、疲労運転、注意力散漫運転、酒酔い運転等の状態)に注意するよう警告し、危険運転によって自身またはほかのドライバーの走行上の安全性が脅かされることがないよう回避する。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施例の運転行為分析警告システムのブロック図である。
【図2】図1の走行データの状態を示す概略図である。
【図3】図1の別の走行データの状態を示す概略図である。
【図4】図1のさらに別の走行データの状態を示す概略図である。
【図5】図1の別の一実施例の運転行為分析警告システムのブロック図である。
【図6】本発明の一実施例の運転行為の分析・警告方法のフローチャートである。
【発明を実施するための形態】
【0014】
本発明の目的、特徴、効果を充分に理解できるように、以下、具体的な実施例と図面を組み合わせ、本発明について詳細に説明する。
【0015】
図1に本発明の一実施例の運転行為分析警告システムのブロック図を示す。図1において、運転行為分析警告システム10は、車両の運転過程中にドライバーの運転行為を検出し、前記運転行為に対応する警告信号WSを提供するために用いられ、前記運転行為は例えば安全運転、疲労運転、注意力散漫運転、酒酔い運転とすることができる。ここで、前記疲労運転、前記注意力散漫運転、前記酒酔い運転を異常運転(危険運転とも呼ばれる)として定義し、また前記安全運転を正常運転として定義する。ただし、ここで定義する前記正常運転と前記異常運転は単なる事例の説明であり、実質上前記運転行為は前記ドライバーが行うあらゆる関連の運転行為を広く指すことに注意が必要である。
【0016】
さらに、前記運転行為分析警告システム10は、データ収集ユニット12、メモリユニット14、分析モジュール16、出力ユニット18を含む。そのうち、前記データ収集ユニット12は前記車両に設置され、且つ前記データ収集ユニット12が前記車両の外部及び(または)内部で関連の走行データDIを収集する。前記走行データDIはたとえば、自車線逸脱警告システム (Lane Departure Warning Systems、LDWS)が生成する車道偏移データ122、前方衝突警告システム (Forward Collision Warning、FCW)が生成する前方検出データ124、重力センサシステム (accelerometerまたはG−sensor)が生成する重力センサデータ126またはその他センサシステムが生成する走行データ128とすることができ、また前記走行データDIは前記車両の内部で収集したアクセルペダル使用データ130、走行速度データ132、ブレーキペダル使用データ134、燃料消費データ136、方向転換データ138、方向指示器・その他ライトの使用データ140としてもよい。さらに、前記走行データDIは以下でそれぞれ説明する。
【0017】
併せて図2を参照する。前記車線逸脱警告システムの前記車道偏移データ122は、前記車両Cが走行する関連の車道LANEと車線境界線LLのパラメータを提供する。そのうち、前記車線境界線LLは前記車道LANEの形成に用いられる。前記車線逸脱警告システムは、前記車道LANEの幅WD、前記車両Cの側縁CLと前記車線境界線LLの間の距離d1、前記車両Cが右側の車道LANE’に入った回数、前記車両Cの横方向速度変化量と前記車両Cが前記車線境界線LLを超えた超過量の前記車道偏移データ122を検出することができる。このため、前記データ収集ユニット12は前記車線逸脱警告システムを通して前記車道LANEと前記車線境界線LLに関する関連の前記車道偏移データ122を取得することができる。
【0018】
併せて図3を参照する。前記前方衝突警告システムの前記前方検出データ124は、前方車両C’との間の距離d2等の関連データを測定するために用いられ、且つ前記前方衝突警告システムにより前記ドライバーの疲労運転行為を判断することができる。そのうち、前記疲労運転行為は、前記ドライバーが安全な距離を維持するための反応時間である。さらに、前記反応時間は、前記車両Cと前記前方車両C’の距離が近過ぎて前記ドライバーが急いでブレーキを踏んだため引き起こされた前記車両速度の減速に必要とした反応の時間である。このため、前記データ収集ユニット12は前記前方衝突警告システムを通して前記車両Cと前記車両Cの前方車両C’間の距離、及び前記ドライバーが前記車両Cと前記前方車両C’間の距離を維持するための反応時間である前記走行データDIを受け取る。
【0019】
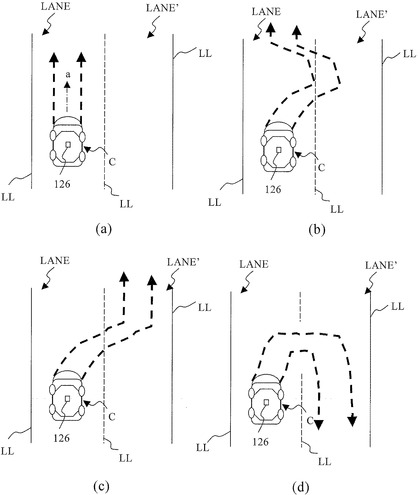
併せて図4を参照する。前記重力センサシステムの前記重力センサデータ126は前記車両Cの加速度aの状態を検知するために用いられる。一般に、前記ドライバーの運転行為の態様は、前記重力センサデータ126に基づいて、直線走行運転(図4(a)参照)、迂回走行運転(図4(b)参照)、正常方向転換(図4(c)参照)、異常方向転換(図4(d)参照)といういくつかの運転方式に区分される。前記ドライバーが前記車両Cを操作して前記直線走行運転を行なうと、前記重力センサシステム26は安定した状態を呈する。ドライバーが前記車両Cを操作して前記迂回走行運転を行なうと、前記重力センサシステムは往復するような対称の振動変化を呈する。前記ドライバーが前記車両Cを操作して前記正常方向転換を行なうと、前記重力センサシステムは安定した変化を呈する。そして前記ドライバーが前記車両Cを操作して前記異常方向転換を行なうと、前記重力センサシステムが激しい変化を呈する。このため、前記データ収集ユニット12は前記重力センサシステムを通して前記車両Cの走行速度変化量の前記走行データDIを受け取ることができ、且つ前記走行速度変化量に基づいて前記車両Cの運転行為が直線走行運転、迂回走行運転、正常方向転換、異常方向転換のどれであるかを判断することができる。
【0020】
再度図1を参照する。前記メモリユニット14は前記データ収集ユニット12に接続され、前記走行データDIを保存し、前回の走行データPDIを形成するために用いられる。ここで、前記メモリユニット14はオプションとすることができることに注意が必要であり、例えば前記警告システム10が動態的なリアルタイムの分析を行うように設計されている場合、前記メモリユニット14は必要なオプションではない。
【0021】
一般に、異常運転の行為は瞬間的に発生する状態ではなく、一定時間の段階的な変化過程である。このため、後続の前記分析モジュール16での分析に提供するために、本実施例においては、前記メモリユニット14を前回または毎回の前記走行データDIの記憶に用いる。前記メモリユニット14に保存された前記走行データDIはすでに発生済みの走行データであり、ここでは前回の走行データPDIと定義する。
【0022】
前記分析モジュール16は前記データ収集ユニット12に接続され、且つ前記走行データDIに基づいて安全運転信号DSSを生成する。前記安全運転信号DSSは前記ドライバーの前記運転行為に関連する。
【0023】
別の一実施例において、前記分析モジュール16は前記データ収集ユニット12と前記メモリユニット14に同時に接続し、且つ前記走行データDIと前記前回の走行データPDIの分析を行なった後、安全運転信号DSSを生成することができる。そのうち、前記安全運転信号DSSは前記ドライバーの運転の安全な行為に関連する。このほか、上述の前記データ収集ユニット12から収集した前記走行データDIは、アルゴリズムにより前記走行データDIの各項の内容パラメータを分析し、前記走行データDIが前記安全運転信号DSSを形成できるようにする。
【0024】
さらに、別の一実施例において、前記分析モジュール16’はさらに、図5に示すように、データ分析ユニット162と決定ユニット164を含む。そのうち、前記データ分析ユニット162は前記走行データDIと前記前回の走行データPDIの分析に用いられる。つまり、前記データ分析ユニット162により、前記走行データDIと前記前回の走行データPDI中の車道LANEの幅WD、前記車両Cの側縁CLと前記車線境界線LLの間の距離、前記車両Cが右側の車道LANE’に入った回数、前記車両Cの横方向速度変化量と前記車両Cが前記車線境界線LLを超えた超過量、前記車両Cと前記車両Cの前方の車両C’間の距離、前記ドライバーが前記車両Cと前記前方の車両C’間の距離を維持する反応時間、前記車両Cの走行速度変化量、アクセルペダル使用データ、走行速度データ、ブレーキペダル使用データ、燃料消費データ、方向転換データ、方向指示器・その他ライトの使用データに関する前記走行データDIを解析することができる。また、解析を終えた後の前記走行データDIは、アルゴリズムを組み込んだ前記決定ユニット162を通して、前記安全運転信号DSSの形成に用いられる。そのうち、前記アルゴリズムはファジー理論としてもよい。
【0025】
このほか、前記安全運転信号DSSは安全運転、疲労運転、注意力散漫運転、酒酔い運転等に対応して表示することができる。ここで、安全運転、疲労運転、注意力散漫運転、酒酔い運転を例として説明する。
【0026】
さらに、上述の前記安全運転信号DSSは、前記決定ユニット162の定量化(または非定量化)方式で複数の警告レンジWAに区分され、前記出力ユニット18での前記安全運転信号DSSに対応する前記警告信号WSの出力に用いることができる。ここで、前記安全運転信号DSSは定量化した方法で表示され、例えば、3つの異なる警告レンジWAとして示される。定量化後の前記安全運転信号DSSが80%以下の値であるとき、この警告レンジWAは異常運転を表す。定量化後の前記安全運転信号DSSが50%から80%の間の値であるとき、この警告レンジWAは警告運転を表す。そして、定量化後の前記安全運転信号DSSが50%以下の値であるとき、この警告レンジWAは危険運転を表す。別の一実施例において、前記運転行為分析警告システム10はさらに表示ユニット20を含むことができ、前記出力ユニット18に接続され、上述の前記警告レンジWAの表示に用いられる。
【0027】
別の一実施例において、前記表示ユニット20は複数のライト202、204、206から構成され、前記警告レンジWAが前記異常運転を表すとき、前記ライトの緑色ライト202が点灯、または消灯、あるいは点滅の方式で前記ドライバーに知らせ、前記警告レンジWAが前記警告運転を表すとき、前記ライトの黄色ライト204が点灯、または消灯、あるいは点滅の方式で前記ドライバーに知らせ、前記警告レンジWAが前記危険運転を表すとき、前記ライトの赤色ライト206が点灯、または消灯、あるいは点滅の方式で前記ドライバーに知らせるようにすることができる。このため、前記ドライバーに前記ライトの表示方式を通して知らせる効果を達する。
【0028】
図6に本発明の一実施例の運転行為の分析・警告方法のフローチャートを示す。本実施例において、前記運転行為の分析・警告方法は、車両の走行過程に用い、ドライバーの運転行為を分析して、前記運転行為に対応する警告信号を提供する。この方法は、工程S1で始まり、前記車両の外部と内部の少なくともいずれか一方で発生する走行データを収集する。例えば、前記走行データは、車道の幅、前記車両の側縁と前記車線境界線の間の距離、前記車両が右側の車道に入った回数、前記車両の横方向速度変化量、前記車両が前記車線境界線を超えた超過量の前記走行データ、前記前方衝突警告システムが受け取る前記車両と前記車両の前方の車両間の距離、前記ドライバーが前記車両と前記前方の車両間の距離を維持するための反応時間、前記車両の走行速度変化量、アクセルペダル使用データ、走行速度データ、ブレーキペダル使用データ、燃料消費データ、方向転換データ、方向指示器・その他ライトの使用データの前記走行データを測定し、計算するために用いることができる。そのうち、前記車線境界線は前記車道の形成に用いられる。さらに、上述で述べた前記走行速度変化量の測定は、前記車両の直線走行運転、迂回走行運転、正常方向転換、異常方向転換の判断に用いることができる。
【0029】
続いて工程S2では、前記走行データを分析し、前記運転行為に関する安全運転信号を生成する。例えば、前記安全運転信号は、安全運転、疲労運転、注意力散漫運転、酒酔い運転とする。一実施例において、アルゴリズムにより前記走行データを分析して前記安全運転信号を演算で得て、定量化または非定量化の方式で前記安全運転信号を定義し、前記ドライバーに知らせるために使用することができる。また別の一実施例において、異なる前記走行データに基づいて前記アルゴリズムで異なる重みを乗じ、前記安全運転信号を生成することができる。例えば、前記運転行為の分析・警告方法はさらに重み対応テーブルを確立する工程を含み、各前記走行データに対応する前記重みを設定し、異なる前記走行データに対して前記重み対応テーブルで対応する重みを選択することができる。
【0030】
続いて工程S3では、前記安全運転信号を前記ドライバーに対して表示し、ドライバーにそのときの自身の前記運転行為の状態を判断させる。一実施例において、前記運転行為の分析・警告方法は、複数の警告レンジを設定する工程を含み、前記安全運転信号に対して分類を行い、前記ドライバーに提供して前記運転行為の判断を行なわせることができる。そのうち、前記警告レンジは異常運転と正常運転を表示することができ、例えば、前記異常運転は前記ドライバーの酒酔い運転、疲労運転、注意力散漫運転の状態を表すことができる。前記異常運転の前記酒酔い運転、前記疲労運転、前記注意力散漫運転をさらに危険運転と警告運転に区分することができる。
【0031】
また、一実施例において、定量化後の前記安全運転信号が80%以下の値であるとき、この警告レンジは異常運転を表し、定量化後の前記安全運転信号が50%から80%の間の値であるとき、この警告レンジは警告運転を表し、定量化後の前記安全運転信号が50%以下の値であるとき、この警告レンジは危険運転を表すように設定することができる。しかしながら、前記警告レンジの数及び前記定量化の数値はさらに増減させて前記ドライバーの使用に合う警告の態様を設計することができることに注意が必要である。
【0032】
本発明の運転行為分析警告システム及び方法は、収集した外部の走行データ(例えば、車線逸脱警告システム(Lane Departure Warning Systems、LDWS)、前方衝突警告システム(Forward Collision Warning、FCW)、重力センサシステム(accelerometerまたはgravity(G)−sensor)とその他走行システムから得たデータ)または内部の走行データ(例えば、アクセルペダル使用データ、走行速度データ、ブレーキペダル使用データ、燃料消費データ、方向転換データ、方向指示器・その他ライトの使用データ等)など関連の走行データを受け取り、分析モジュールで前記走行データを分析し、且つ前記走行データから前記車線逸脱警告システムが受け取った車道の幅、前記車両の側縁と車線境界線の間の距離、前記車両が右側の前記車道に入った回数、前記車両の横方向速度の変化量と前記車両が前記車線境界線を越えた超過量、前記車両と前記車両の前方の車両間の距離と前記ドライバーが前記車両と前記前方の車両間の距離を維持するための反応時間と前記車両の走行速度の変化量等の関連データを取り出し、前記分析モジュール中に組み込まれたアルゴリズム(例えばファジー理論(Fuzzy theory))を備えた決定ユニットを通して上述の走行データを分析し、安全運転信号を生成して、前記安全運転信号をドライバーに提供し、自身の運転行為が正常運転に属するか否かを理解させることができる。
【符号の説明】
【0033】
10 運転行為分析警告システム
12 データ収集ユニット
122 車道偏移データ
124 前方検出データ
126 重力センサデータ
128 センサデータ
130 アクセルペダル使用データ
132 走行速度データ
134 ブレーキペダル使用データ
136 燃料消費データ
138 方向転換データ
140 方向指示器・その他ライトの使用データ
14 メモリユニット
16、16’ 分析モジュール
18 出力ユニット
WS 警告信号
LANE、LANE’ 車道
LL 車線境界線
WD 幅
CL 側縁
d1、d2 距離
DI 走行データ
PDI 前回の走行データ
C、C’ 車両
a 加速度
DSS 安全運転信号
WA 警告レンジ
【技術分野】
【0001】
本発明は運転行為分析警告システム及び方法に関し、特に車両の外部及び(または)内部で収集した走行データからドライバーが自ら自身の運転行為を判断できるシステム及び方法に関する。
【背景技術】
【0002】
従来、高度道路交通システムの技術分野では、各国が大規模な計画で関連の研究を進めている。中でも、特にドライバーの運転行為を分析して走行の安全を実現するというテーマがあるが、この走行の安全はドライバーの正常な運転行為と異常な運転行為の分析に基づいている。現在市場ではすでにドライバーの運転行為を検出することに関する検出システムの販売が開始されており、検出の方法はドライバーの生理信号(例えば頭部の移動、心拍の変動、ハンドルの移動軌跡、眼部の移動等)の分析を含む。
【0003】
運転行為の状態の分析に関する研究文献のうち、多くが分析信号ソースから分類して2つの大きなカテゴリに区分することができ、1つはドライバーの生理信号及びそれから派生する生理状態を利用する生理信号分析法であり、もう1つがドライバーの走行表現を分析信号として利用する走行表現分析法である。その違いを以下で説明する。
【0004】
上述の生理信号分析法は、ドライバーの行為状態を直接生理信号上に反映させるもので、たとえば運転の疲労の例では、ドライバーがうたたねの徴候を現すと、脳で脳波(electroencephalogram、EEG)の変化が生じる。このほか、ドライバーに注意力分散状態が現れたとき、たとえばナビゲーション装置を使用するときに、視線がナビゲーション装置に移動し、前方の道路状況に注意が向かなくなるなどといった状況では、画像識別技術を使用することで、視線を分析してドライバーの現在の注意力散漫状態を識別することができる。しかしながら、上述の識別技術の実現は非常に困難である。脳波テスト法を例とすると、ドライバーは脳波測定装置を装着して運転したがらない。また、画像識別技術にも困難な点がある。関連文献においては、人の顔及び眼、表情、唇で識別・追跡する識別技術がよく見られるが、人の顔が昼間の走行時光と影によって変化する複雑な環境では、アルゴリズムの堅牢性が大きな試練に直面する。さらに、人の視線の識別を基礎とするシステムは、ドライバーが日差しの強いときにサングラスをかけてしまうと作用しなくなる。これらの生理信号分析法には測定が正確である等の利点があるものの、現実の生活の中でこれらの測定方法を実現することは難しい。
【0005】
さらに、上述の走行表現分析法はドライバーの状態によって生じる運転行為を走行分析の根拠とする。つまり、間接的な方式でそのドライバーの運転状態を判断する。運転の疲労を例とすると、通常運転の表現上では反応時間の増加やハンドル制御の敏捷さ不足などの反応として反映される。しかしながら、このような分析信号の欠点はドライバーの運転行為が通常いずれも定性的に描写され、定量的分析が少なく、定義をドライバーの判断に供することが難しい。
【0006】
このため、本発明の提供するシステム及び方法で、従来技術の欠点を解決する必要がある。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の目的は、車両の運転過程においてドライバーの運転行為を分析し、ドライバーのそのときの運転行為に対して警告を与える、運転行為分析警告システムを提供することにある。
【0008】
本発明の別の目的は、ドライバーの運転行為を分析し、ドライバーが自身の運転行為を自ら判断するために供する、運転行為の分析・警告方法を提供することにある。
【課題を解決するための手段】
【0009】
上述の目的及びその他目的を達するため、本発明の運転行為分析警告システムは、車両の運転過程中にドライバーの運転行為を検出するために用いられ、データ収集ユニット、分析モジュール、出力ユニットを含み、前記データ収集ユニットは前記車両に設置され、且つ前記車両の外部と内部の少なくともいずれか一方に関する走行データを収集し、前記分析モジュールは前記データ収集ユニットに接続され、前記走行データに基づいて安全運転信号を生成し、且つ前記安全運転信号は前記ドライバーの前記運転行為に関連する。前記出力ユニットは前記分析モジュールに接続され、前記安全運転信号を出力して前記ドライバーに提供し、自身の前記運転行為を判断させるために用いられる。
【0010】
上述の目的及びその他目的を達するため、本発明の運転行為の分析・警告方法は、車両の運転過程においてドライバーの運転行為を検出し、前記運転行為に対応する警告信号を提供するために用いられ、(a)前記車両の外部と内部の少なくともいずれか一方の発生する走行データを収集する工程と、続いて(b)前記走行データを分析し、前記運転行為に関する安全運転信号を生成する工程と、(c)示された前記安全運転信号を前記ドライバーに提供してそのときの自身の前記運転行為の状態を判断させる工程とを含む。
【0011】
従来技術と比較して、本発明の運転行為分析警告システム及び方法は、外部の走行データ(例えば前記走行データは車線逸脱警告システム(Lane Departure Warning Systems、LDWS)、前方衝突警告システム(Forward Collision Warning、FCW)、重力センサシステム(accelerometerまたはgravity(G)−sensor)とその他走行システム)、または内部の走行データ(例えばアクセルペダル使用データ、走行速度データ、ブレーキペダル使用データ、燃料消費データ、方向転換データ、方向指示器・その他ライトの使用データ等)が収集した関連走行データを受け取り、分析モジュールで前記走行データを分析し、且つ前記走行データから前記車線逸脱警告システムが受け取った車道の幅、前記車両の側縁と車線境界線の間の距離、前記車両が右側の前記車道に入った回数、前記車両の横方向速度の変化量と前記車両が前記車線境界線を越えた超過量、前記車両と前記車両の前方の車両間の距離と前記ドライバーが前記車両と前記前方の車両間の距離を維持するための反応時間と前記車両の走行速度の変化量等の関連データを取り出し、前記分析モジュール中に組み込まれたアルゴリズム(例えばファジー理論(Fuzzy theory))を備えた決定ユニットを通して上述の走行データを分析し、安全運転信号を生成して、前記安全運転信号をドライバーに提供し、自身の運転行為が正常運転に属するか否かを理解させることができる。
【0012】
一実施例において、本発明の出力する前記安全運転信号は、定量化した方式で表され、対応する複数の警告レンジとして示すことで、迅速に、直接的かつ明確にドライバーに現在の運転状態(例えば安全運転、疲労運転、注意力散漫運転、酒酔い運転等の状態)に注意するよう警告し、危険運転によって自身またはほかのドライバーの走行上の安全性が脅かされることがないよう回避する。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施例の運転行為分析警告システムのブロック図である。
【図2】図1の走行データの状態を示す概略図である。
【図3】図1の別の走行データの状態を示す概略図である。
【図4】図1のさらに別の走行データの状態を示す概略図である。
【図5】図1の別の一実施例の運転行為分析警告システムのブロック図である。
【図6】本発明の一実施例の運転行為の分析・警告方法のフローチャートである。
【発明を実施するための形態】
【0014】
本発明の目的、特徴、効果を充分に理解できるように、以下、具体的な実施例と図面を組み合わせ、本発明について詳細に説明する。
【0015】
図1に本発明の一実施例の運転行為分析警告システムのブロック図を示す。図1において、運転行為分析警告システム10は、車両の運転過程中にドライバーの運転行為を検出し、前記運転行為に対応する警告信号WSを提供するために用いられ、前記運転行為は例えば安全運転、疲労運転、注意力散漫運転、酒酔い運転とすることができる。ここで、前記疲労運転、前記注意力散漫運転、前記酒酔い運転を異常運転(危険運転とも呼ばれる)として定義し、また前記安全運転を正常運転として定義する。ただし、ここで定義する前記正常運転と前記異常運転は単なる事例の説明であり、実質上前記運転行為は前記ドライバーが行うあらゆる関連の運転行為を広く指すことに注意が必要である。
【0016】
さらに、前記運転行為分析警告システム10は、データ収集ユニット12、メモリユニット14、分析モジュール16、出力ユニット18を含む。そのうち、前記データ収集ユニット12は前記車両に設置され、且つ前記データ収集ユニット12が前記車両の外部及び(または)内部で関連の走行データDIを収集する。前記走行データDIはたとえば、自車線逸脱警告システム (Lane Departure Warning Systems、LDWS)が生成する車道偏移データ122、前方衝突警告システム (Forward Collision Warning、FCW)が生成する前方検出データ124、重力センサシステム (accelerometerまたはG−sensor)が生成する重力センサデータ126またはその他センサシステムが生成する走行データ128とすることができ、また前記走行データDIは前記車両の内部で収集したアクセルペダル使用データ130、走行速度データ132、ブレーキペダル使用データ134、燃料消費データ136、方向転換データ138、方向指示器・その他ライトの使用データ140としてもよい。さらに、前記走行データDIは以下でそれぞれ説明する。
【0017】
併せて図2を参照する。前記車線逸脱警告システムの前記車道偏移データ122は、前記車両Cが走行する関連の車道LANEと車線境界線LLのパラメータを提供する。そのうち、前記車線境界線LLは前記車道LANEの形成に用いられる。前記車線逸脱警告システムは、前記車道LANEの幅WD、前記車両Cの側縁CLと前記車線境界線LLの間の距離d1、前記車両Cが右側の車道LANE’に入った回数、前記車両Cの横方向速度変化量と前記車両Cが前記車線境界線LLを超えた超過量の前記車道偏移データ122を検出することができる。このため、前記データ収集ユニット12は前記車線逸脱警告システムを通して前記車道LANEと前記車線境界線LLに関する関連の前記車道偏移データ122を取得することができる。
【0018】
併せて図3を参照する。前記前方衝突警告システムの前記前方検出データ124は、前方車両C’との間の距離d2等の関連データを測定するために用いられ、且つ前記前方衝突警告システムにより前記ドライバーの疲労運転行為を判断することができる。そのうち、前記疲労運転行為は、前記ドライバーが安全な距離を維持するための反応時間である。さらに、前記反応時間は、前記車両Cと前記前方車両C’の距離が近過ぎて前記ドライバーが急いでブレーキを踏んだため引き起こされた前記車両速度の減速に必要とした反応の時間である。このため、前記データ収集ユニット12は前記前方衝突警告システムを通して前記車両Cと前記車両Cの前方車両C’間の距離、及び前記ドライバーが前記車両Cと前記前方車両C’間の距離を維持するための反応時間である前記走行データDIを受け取る。
【0019】
併せて図4を参照する。前記重力センサシステムの前記重力センサデータ126は前記車両Cの加速度aの状態を検知するために用いられる。一般に、前記ドライバーの運転行為の態様は、前記重力センサデータ126に基づいて、直線走行運転(図4(a)参照)、迂回走行運転(図4(b)参照)、正常方向転換(図4(c)参照)、異常方向転換(図4(d)参照)といういくつかの運転方式に区分される。前記ドライバーが前記車両Cを操作して前記直線走行運転を行なうと、前記重力センサシステム26は安定した状態を呈する。ドライバーが前記車両Cを操作して前記迂回走行運転を行なうと、前記重力センサシステムは往復するような対称の振動変化を呈する。前記ドライバーが前記車両Cを操作して前記正常方向転換を行なうと、前記重力センサシステムは安定した変化を呈する。そして前記ドライバーが前記車両Cを操作して前記異常方向転換を行なうと、前記重力センサシステムが激しい変化を呈する。このため、前記データ収集ユニット12は前記重力センサシステムを通して前記車両Cの走行速度変化量の前記走行データDIを受け取ることができ、且つ前記走行速度変化量に基づいて前記車両Cの運転行為が直線走行運転、迂回走行運転、正常方向転換、異常方向転換のどれであるかを判断することができる。
【0020】
再度図1を参照する。前記メモリユニット14は前記データ収集ユニット12に接続され、前記走行データDIを保存し、前回の走行データPDIを形成するために用いられる。ここで、前記メモリユニット14はオプションとすることができることに注意が必要であり、例えば前記警告システム10が動態的なリアルタイムの分析を行うように設計されている場合、前記メモリユニット14は必要なオプションではない。
【0021】
一般に、異常運転の行為は瞬間的に発生する状態ではなく、一定時間の段階的な変化過程である。このため、後続の前記分析モジュール16での分析に提供するために、本実施例においては、前記メモリユニット14を前回または毎回の前記走行データDIの記憶に用いる。前記メモリユニット14に保存された前記走行データDIはすでに発生済みの走行データであり、ここでは前回の走行データPDIと定義する。
【0022】
前記分析モジュール16は前記データ収集ユニット12に接続され、且つ前記走行データDIに基づいて安全運転信号DSSを生成する。前記安全運転信号DSSは前記ドライバーの前記運転行為に関連する。
【0023】
別の一実施例において、前記分析モジュール16は前記データ収集ユニット12と前記メモリユニット14に同時に接続し、且つ前記走行データDIと前記前回の走行データPDIの分析を行なった後、安全運転信号DSSを生成することができる。そのうち、前記安全運転信号DSSは前記ドライバーの運転の安全な行為に関連する。このほか、上述の前記データ収集ユニット12から収集した前記走行データDIは、アルゴリズムにより前記走行データDIの各項の内容パラメータを分析し、前記走行データDIが前記安全運転信号DSSを形成できるようにする。
【0024】
さらに、別の一実施例において、前記分析モジュール16’はさらに、図5に示すように、データ分析ユニット162と決定ユニット164を含む。そのうち、前記データ分析ユニット162は前記走行データDIと前記前回の走行データPDIの分析に用いられる。つまり、前記データ分析ユニット162により、前記走行データDIと前記前回の走行データPDI中の車道LANEの幅WD、前記車両Cの側縁CLと前記車線境界線LLの間の距離、前記車両Cが右側の車道LANE’に入った回数、前記車両Cの横方向速度変化量と前記車両Cが前記車線境界線LLを超えた超過量、前記車両Cと前記車両Cの前方の車両C’間の距離、前記ドライバーが前記車両Cと前記前方の車両C’間の距離を維持する反応時間、前記車両Cの走行速度変化量、アクセルペダル使用データ、走行速度データ、ブレーキペダル使用データ、燃料消費データ、方向転換データ、方向指示器・その他ライトの使用データに関する前記走行データDIを解析することができる。また、解析を終えた後の前記走行データDIは、アルゴリズムを組み込んだ前記決定ユニット162を通して、前記安全運転信号DSSの形成に用いられる。そのうち、前記アルゴリズムはファジー理論としてもよい。
【0025】
このほか、前記安全運転信号DSSは安全運転、疲労運転、注意力散漫運転、酒酔い運転等に対応して表示することができる。ここで、安全運転、疲労運転、注意力散漫運転、酒酔い運転を例として説明する。
【0026】
さらに、上述の前記安全運転信号DSSは、前記決定ユニット162の定量化(または非定量化)方式で複数の警告レンジWAに区分され、前記出力ユニット18での前記安全運転信号DSSに対応する前記警告信号WSの出力に用いることができる。ここで、前記安全運転信号DSSは定量化した方法で表示され、例えば、3つの異なる警告レンジWAとして示される。定量化後の前記安全運転信号DSSが80%以下の値であるとき、この警告レンジWAは異常運転を表す。定量化後の前記安全運転信号DSSが50%から80%の間の値であるとき、この警告レンジWAは警告運転を表す。そして、定量化後の前記安全運転信号DSSが50%以下の値であるとき、この警告レンジWAは危険運転を表す。別の一実施例において、前記運転行為分析警告システム10はさらに表示ユニット20を含むことができ、前記出力ユニット18に接続され、上述の前記警告レンジWAの表示に用いられる。
【0027】
別の一実施例において、前記表示ユニット20は複数のライト202、204、206から構成され、前記警告レンジWAが前記異常運転を表すとき、前記ライトの緑色ライト202が点灯、または消灯、あるいは点滅の方式で前記ドライバーに知らせ、前記警告レンジWAが前記警告運転を表すとき、前記ライトの黄色ライト204が点灯、または消灯、あるいは点滅の方式で前記ドライバーに知らせ、前記警告レンジWAが前記危険運転を表すとき、前記ライトの赤色ライト206が点灯、または消灯、あるいは点滅の方式で前記ドライバーに知らせるようにすることができる。このため、前記ドライバーに前記ライトの表示方式を通して知らせる効果を達する。
【0028】
図6に本発明の一実施例の運転行為の分析・警告方法のフローチャートを示す。本実施例において、前記運転行為の分析・警告方法は、車両の走行過程に用い、ドライバーの運転行為を分析して、前記運転行為に対応する警告信号を提供する。この方法は、工程S1で始まり、前記車両の外部と内部の少なくともいずれか一方で発生する走行データを収集する。例えば、前記走行データは、車道の幅、前記車両の側縁と前記車線境界線の間の距離、前記車両が右側の車道に入った回数、前記車両の横方向速度変化量、前記車両が前記車線境界線を超えた超過量の前記走行データ、前記前方衝突警告システムが受け取る前記車両と前記車両の前方の車両間の距離、前記ドライバーが前記車両と前記前方の車両間の距離を維持するための反応時間、前記車両の走行速度変化量、アクセルペダル使用データ、走行速度データ、ブレーキペダル使用データ、燃料消費データ、方向転換データ、方向指示器・その他ライトの使用データの前記走行データを測定し、計算するために用いることができる。そのうち、前記車線境界線は前記車道の形成に用いられる。さらに、上述で述べた前記走行速度変化量の測定は、前記車両の直線走行運転、迂回走行運転、正常方向転換、異常方向転換の判断に用いることができる。
【0029】
続いて工程S2では、前記走行データを分析し、前記運転行為に関する安全運転信号を生成する。例えば、前記安全運転信号は、安全運転、疲労運転、注意力散漫運転、酒酔い運転とする。一実施例において、アルゴリズムにより前記走行データを分析して前記安全運転信号を演算で得て、定量化または非定量化の方式で前記安全運転信号を定義し、前記ドライバーに知らせるために使用することができる。また別の一実施例において、異なる前記走行データに基づいて前記アルゴリズムで異なる重みを乗じ、前記安全運転信号を生成することができる。例えば、前記運転行為の分析・警告方法はさらに重み対応テーブルを確立する工程を含み、各前記走行データに対応する前記重みを設定し、異なる前記走行データに対して前記重み対応テーブルで対応する重みを選択することができる。
【0030】
続いて工程S3では、前記安全運転信号を前記ドライバーに対して表示し、ドライバーにそのときの自身の前記運転行為の状態を判断させる。一実施例において、前記運転行為の分析・警告方法は、複数の警告レンジを設定する工程を含み、前記安全運転信号に対して分類を行い、前記ドライバーに提供して前記運転行為の判断を行なわせることができる。そのうち、前記警告レンジは異常運転と正常運転を表示することができ、例えば、前記異常運転は前記ドライバーの酒酔い運転、疲労運転、注意力散漫運転の状態を表すことができる。前記異常運転の前記酒酔い運転、前記疲労運転、前記注意力散漫運転をさらに危険運転と警告運転に区分することができる。
【0031】
また、一実施例において、定量化後の前記安全運転信号が80%以下の値であるとき、この警告レンジは異常運転を表し、定量化後の前記安全運転信号が50%から80%の間の値であるとき、この警告レンジは警告運転を表し、定量化後の前記安全運転信号が50%以下の値であるとき、この警告レンジは危険運転を表すように設定することができる。しかしながら、前記警告レンジの数及び前記定量化の数値はさらに増減させて前記ドライバーの使用に合う警告の態様を設計することができることに注意が必要である。
【0032】
本発明の運転行為分析警告システム及び方法は、収集した外部の走行データ(例えば、車線逸脱警告システム(Lane Departure Warning Systems、LDWS)、前方衝突警告システム(Forward Collision Warning、FCW)、重力センサシステム(accelerometerまたはgravity(G)−sensor)とその他走行システムから得たデータ)または内部の走行データ(例えば、アクセルペダル使用データ、走行速度データ、ブレーキペダル使用データ、燃料消費データ、方向転換データ、方向指示器・その他ライトの使用データ等)など関連の走行データを受け取り、分析モジュールで前記走行データを分析し、且つ前記走行データから前記車線逸脱警告システムが受け取った車道の幅、前記車両の側縁と車線境界線の間の距離、前記車両が右側の前記車道に入った回数、前記車両の横方向速度の変化量と前記車両が前記車線境界線を越えた超過量、前記車両と前記車両の前方の車両間の距離と前記ドライバーが前記車両と前記前方の車両間の距離を維持するための反応時間と前記車両の走行速度の変化量等の関連データを取り出し、前記分析モジュール中に組み込まれたアルゴリズム(例えばファジー理論(Fuzzy theory))を備えた決定ユニットを通して上述の走行データを分析し、安全運転信号を生成して、前記安全運転信号をドライバーに提供し、自身の運転行為が正常運転に属するか否かを理解させることができる。
【符号の説明】
【0033】
10 運転行為分析警告システム
12 データ収集ユニット
122 車道偏移データ
124 前方検出データ
126 重力センサデータ
128 センサデータ
130 アクセルペダル使用データ
132 走行速度データ
134 ブレーキペダル使用データ
136 燃料消費データ
138 方向転換データ
140 方向指示器・その他ライトの使用データ
14 メモリユニット
16、16’ 分析モジュール
18 出力ユニット
WS 警告信号
LANE、LANE’ 車道
LL 車線境界線
WD 幅
CL 側縁
d1、d2 距離
DI 走行データ
PDI 前回の走行データ
C、C’ 車両
a 加速度
DSS 安全運転信号
WA 警告レンジ
【特許請求の範囲】
【請求項1】
車両の運転過程においてドライバーの運転行為を検出する、運転行為分析警告システムであって、
前記車両に設置され、前記車両の外部と内部の少なくともいずれか一方の状況に関連する走行データを収集するデータ収集ユニットと、
前記データ収集ユニットに接続され、前記走行データに基づいて、前記ドライバーの前記運転行為に関する安全運転信号を生成する分析モジュールと、
前記分析モジュールに接続され、前記安全運転信号を出力して前記ドライバーに提供し、前記ドライバーが自身の前記運転行為を判断できるようにする出力ユニットと、
を含むことを特徴とする、運転行為分析警告システム。
【請求項2】
前記データ収集ユニットに接続されたメモリユニットを含み、前記メモリユニットが前記走行データを保存して前回の走行データを形成することを特徴とする、請求項1に記載の運転行為分析警告システム。
【請求項3】
前記走行データが、車道偏移データ、前方検出データ、重力感測データ、アクセルペダル使用データ、走行速度データ、ブレーキペダル使用データ、燃料消費データ、方向転換データ、方向指示器・その他ライトの使用データのうち少なくともいずれか1つを含むことを特徴とする、請求項1に記載の運転行為分析警告システム。
【請求項4】
前記データ収集ユニットが、前記車道偏移データから車道の幅、前記車両の側縁と車線境界線の間の距離、前記車両が右側の前記車道に入った回数、前記車両の横方向速度の変化量と前記車両が前記車線境界線を越えた超過量のうち少なくとも1つの前記走行データを収集し、そのうち前記車線境界線が前記車道の形成に用いられることを特徴とする、請求項3に記載の運転行為分析警告システム。
【請求項5】
前記データ収集ユニットが、前記前方検出データから、前記車両と前記車両の前方の車両間の距離、前記ドライバーが前記車両と前記前方の車両間の距離を維持するための反応時間のうち少なくとも1つの前記走行データを収集することを特徴とする、請求項3に記載の運転行為分析警告システム。
【請求項6】
前記データ収集ユニットが、前記重力センサシステムから前記車両の走行速度の変化量を収集し、且つ前記変化量に基づいて前記車両が直線走行運転、迂回走行運転、正常方向転換、異常方向転換のどれに該当するかを判断することを特徴とする、請求項3に記載の運転行為分析警告システム。
【請求項7】
前記分析モジュールが、現在の前記走行データと前記前回の走行データを分析するために用いられるデータ分析ユニットを含むことを特徴とする、請求項2に記載の運転行為分析警告システム。
【請求項8】
前記分析モジュールが、前記安全運転信号を生成するために現在の前記走行データと前記前回の走行データを演算するアルゴリズムを組み込んだ決定ユニットを含むことを特徴とする、請求項7に記載の運転行為分析警告システム。
【請求項9】
前記アルゴリズムがファジー理論であることを特徴とする、請求項8に記載の運転行為分析警告システム。
【請求項10】
前記安全運転信号が、前記決定ユニットによる定量化を経て複数の警告レンジに区分され、前記安全運転信号が前記警告レンジに対応する警告信号として出力されることを特徴とする、請求項7に記載の運転行為分析警告システム。
【請求項11】
前記出力ユニットに接続された表示ユニットを含み、前記表示ユニットが前記警告レンジを表示するために用いられることを特徴とする、請求項10に記載の運転行為分析警告システム。
【請求項12】
前記安全運転信号が、前記ドライバーの運転行為を安全運転、疲労運転、注意力散漫運転、酒酔い運転のいずれかとして示すことを特徴とする、請求項1に記載の運転行為分析警告システム。
【請求項13】
車両の運転過程においてドライバーの運転行為を検出し、前記運転行為に対応する警告信号を提供する運転行為の分析・警告方法であって、
前記車両の外部と内部の状況の少なくともいずれか一方に関連する走行データを収集する工程と、
前記走行データを分析し、前記運転行為に関する安全運転信号を生成する工程と、
前記安全運転信号を表示し、前記ドライバーが自身の前記運転行為の状態を判断できるように提供する工程と、
を含むことを特徴とする、運転行為の分析・警告方法。
【請求項14】
前記走行データを保存し、前回の走行データを形成する工程を含むことを特徴とする、請求項13に記載の運転行為の分析・警告方法。
【請求項15】
前記走行データの分析が、現在の前記走行データと前記前回の走行データの比較であることを特徴とする、請求項14に記載の運転行為の分析・警告方法。
【請求項16】
前記走行データを収集する工程で収集されるデータが、車道の幅、前記車両の側縁と車線境界線の間の距離、前記車両が右側の前記車道に入った回数、前記車両の横方向速度の変化量と前記車両が前記車線境界線を越えた超過量のうち少なくとも1つの前記走行データであり、そのうち前記車線境界線が前記車道の形成に用いられることを特徴とする、請求項13に記載の運転行為の分析・警告方法。
【請求項17】
前記走行データを収集する工程で収集されるデータが、前記車両と前方の車両の間の距離と前記ドライバーが前記車両と前記前方の車両間の距離を維持するための反応時間のうち少なくとも1つの前記走行データであることを特徴とする、請求項13に記載の運転行為の分析・警告方法。
【請求項18】
前記走行データを収集する工程で収集されるデータが、前記車両の走行速度の変化量であり、且つ前記走行速度の変化量に基づいて前記車両が直線走行運転、迂回走行運転、正常方向転換、異常方向転換のどれに該当するかを判断することを特徴とする、請求項13に記載の運転行為の分析・警告方法。
【請求項19】
前記走行データを収集する工程で収集されるデータが、前記車両のアクセルペダル使用データ、走行速度データ、ブレーキペダル使用データ、燃料消費データ、方向転換データ、方向指示器・その他ライトの使用データのうち少なくとも1つであることを特徴とする、請求項13に記載の運転行為の分析・警告方法。
【請求項20】
アルゴリズムにより前記走行データの演算を行い、前記安全運転信号を取得する工程を含むことを特徴とする、請求項13に記載の運転行為の分析・警告方法。
【請求項21】
前記アルゴリズムが、異なる前記走行データに基づいて異なる重みを提供し、前記安全運転信号を生成することを特徴とする、請求項20に記載の運転行為の分析・警告方法。
【請求項22】
前記走行データに対応する前記重みを設定する、重み対応テーブルを確立する工程を含むことを特徴とする、請求項21に記載の運転行為の分析・警告方法。
【請求項23】
前記安全運転信号に基づいて複数の警告レンジを設定する工程を含み、前記ドライバーが前記運転行為の判断を行なうために供することを特徴とする、請求項20に記載の運転行為の分析・警告方法。
【請求項24】
前記警告レンジが、異常運転と正常運転を表すことを特徴とする、請求項23に記載の運転行為の分析・警告方法。
【請求項25】
前記異常運転が、前記ドライバーの酒酔い運転、疲労運転、注意力散漫運転の状態を表すことを特徴とする、請求項24に記載の運転行為の分析・警告方法。
【請求項26】
前記異常運転がさらに、危険運転と警告運転に区分されることを特徴とする、請求項24に記載の運転行為の分析・警告方法。
【請求項27】
定量化後の前記安全運転信号が80%以下の値であるとき、前記警告レンジが前記異常運転を表すことを特徴とする、請求項24に記載の運転行為の分析・警告方法。
【請求項28】
定量化後の前記安全運転信号が50%と80%の間の値であるとき、前記警告レンジが前記警告運転を表すことを特徴とする、請求項26に記載の運転行為の分析・警告方法。
【請求項29】
定量化後の前記安全運転信号が50%以下の値であるとき、前記警告レンジが前記危険運転を表すことを特徴とする、請求項26に記載の運転行為の分析・警告方法。
【請求項1】
車両の運転過程においてドライバーの運転行為を検出する、運転行為分析警告システムであって、
前記車両に設置され、前記車両の外部と内部の少なくともいずれか一方の状況に関連する走行データを収集するデータ収集ユニットと、
前記データ収集ユニットに接続され、前記走行データに基づいて、前記ドライバーの前記運転行為に関する安全運転信号を生成する分析モジュールと、
前記分析モジュールに接続され、前記安全運転信号を出力して前記ドライバーに提供し、前記ドライバーが自身の前記運転行為を判断できるようにする出力ユニットと、
を含むことを特徴とする、運転行為分析警告システム。
【請求項2】
前記データ収集ユニットに接続されたメモリユニットを含み、前記メモリユニットが前記走行データを保存して前回の走行データを形成することを特徴とする、請求項1に記載の運転行為分析警告システム。
【請求項3】
前記走行データが、車道偏移データ、前方検出データ、重力感測データ、アクセルペダル使用データ、走行速度データ、ブレーキペダル使用データ、燃料消費データ、方向転換データ、方向指示器・その他ライトの使用データのうち少なくともいずれか1つを含むことを特徴とする、請求項1に記載の運転行為分析警告システム。
【請求項4】
前記データ収集ユニットが、前記車道偏移データから車道の幅、前記車両の側縁と車線境界線の間の距離、前記車両が右側の前記車道に入った回数、前記車両の横方向速度の変化量と前記車両が前記車線境界線を越えた超過量のうち少なくとも1つの前記走行データを収集し、そのうち前記車線境界線が前記車道の形成に用いられることを特徴とする、請求項3に記載の運転行為分析警告システム。
【請求項5】
前記データ収集ユニットが、前記前方検出データから、前記車両と前記車両の前方の車両間の距離、前記ドライバーが前記車両と前記前方の車両間の距離を維持するための反応時間のうち少なくとも1つの前記走行データを収集することを特徴とする、請求項3に記載の運転行為分析警告システム。
【請求項6】
前記データ収集ユニットが、前記重力センサシステムから前記車両の走行速度の変化量を収集し、且つ前記変化量に基づいて前記車両が直線走行運転、迂回走行運転、正常方向転換、異常方向転換のどれに該当するかを判断することを特徴とする、請求項3に記載の運転行為分析警告システム。
【請求項7】
前記分析モジュールが、現在の前記走行データと前記前回の走行データを分析するために用いられるデータ分析ユニットを含むことを特徴とする、請求項2に記載の運転行為分析警告システム。
【請求項8】
前記分析モジュールが、前記安全運転信号を生成するために現在の前記走行データと前記前回の走行データを演算するアルゴリズムを組み込んだ決定ユニットを含むことを特徴とする、請求項7に記載の運転行為分析警告システム。
【請求項9】
前記アルゴリズムがファジー理論であることを特徴とする、請求項8に記載の運転行為分析警告システム。
【請求項10】
前記安全運転信号が、前記決定ユニットによる定量化を経て複数の警告レンジに区分され、前記安全運転信号が前記警告レンジに対応する警告信号として出力されることを特徴とする、請求項7に記載の運転行為分析警告システム。
【請求項11】
前記出力ユニットに接続された表示ユニットを含み、前記表示ユニットが前記警告レンジを表示するために用いられることを特徴とする、請求項10に記載の運転行為分析警告システム。
【請求項12】
前記安全運転信号が、前記ドライバーの運転行為を安全運転、疲労運転、注意力散漫運転、酒酔い運転のいずれかとして示すことを特徴とする、請求項1に記載の運転行為分析警告システム。
【請求項13】
車両の運転過程においてドライバーの運転行為を検出し、前記運転行為に対応する警告信号を提供する運転行為の分析・警告方法であって、
前記車両の外部と内部の状況の少なくともいずれか一方に関連する走行データを収集する工程と、
前記走行データを分析し、前記運転行為に関する安全運転信号を生成する工程と、
前記安全運転信号を表示し、前記ドライバーが自身の前記運転行為の状態を判断できるように提供する工程と、
を含むことを特徴とする、運転行為の分析・警告方法。
【請求項14】
前記走行データを保存し、前回の走行データを形成する工程を含むことを特徴とする、請求項13に記載の運転行為の分析・警告方法。
【請求項15】
前記走行データの分析が、現在の前記走行データと前記前回の走行データの比較であることを特徴とする、請求項14に記載の運転行為の分析・警告方法。
【請求項16】
前記走行データを収集する工程で収集されるデータが、車道の幅、前記車両の側縁と車線境界線の間の距離、前記車両が右側の前記車道に入った回数、前記車両の横方向速度の変化量と前記車両が前記車線境界線を越えた超過量のうち少なくとも1つの前記走行データであり、そのうち前記車線境界線が前記車道の形成に用いられることを特徴とする、請求項13に記載の運転行為の分析・警告方法。
【請求項17】
前記走行データを収集する工程で収集されるデータが、前記車両と前方の車両の間の距離と前記ドライバーが前記車両と前記前方の車両間の距離を維持するための反応時間のうち少なくとも1つの前記走行データであることを特徴とする、請求項13に記載の運転行為の分析・警告方法。
【請求項18】
前記走行データを収集する工程で収集されるデータが、前記車両の走行速度の変化量であり、且つ前記走行速度の変化量に基づいて前記車両が直線走行運転、迂回走行運転、正常方向転換、異常方向転換のどれに該当するかを判断することを特徴とする、請求項13に記載の運転行為の分析・警告方法。
【請求項19】
前記走行データを収集する工程で収集されるデータが、前記車両のアクセルペダル使用データ、走行速度データ、ブレーキペダル使用データ、燃料消費データ、方向転換データ、方向指示器・その他ライトの使用データのうち少なくとも1つであることを特徴とする、請求項13に記載の運転行為の分析・警告方法。
【請求項20】
アルゴリズムにより前記走行データの演算を行い、前記安全運転信号を取得する工程を含むことを特徴とする、請求項13に記載の運転行為の分析・警告方法。
【請求項21】
前記アルゴリズムが、異なる前記走行データに基づいて異なる重みを提供し、前記安全運転信号を生成することを特徴とする、請求項20に記載の運転行為の分析・警告方法。
【請求項22】
前記走行データに対応する前記重みを設定する、重み対応テーブルを確立する工程を含むことを特徴とする、請求項21に記載の運転行為の分析・警告方法。
【請求項23】
前記安全運転信号に基づいて複数の警告レンジを設定する工程を含み、前記ドライバーが前記運転行為の判断を行なうために供することを特徴とする、請求項20に記載の運転行為の分析・警告方法。
【請求項24】
前記警告レンジが、異常運転と正常運転を表すことを特徴とする、請求項23に記載の運転行為の分析・警告方法。
【請求項25】
前記異常運転が、前記ドライバーの酒酔い運転、疲労運転、注意力散漫運転の状態を表すことを特徴とする、請求項24に記載の運転行為の分析・警告方法。
【請求項26】
前記異常運転がさらに、危険運転と警告運転に区分されることを特徴とする、請求項24に記載の運転行為の分析・警告方法。
【請求項27】
定量化後の前記安全運転信号が80%以下の値であるとき、前記警告レンジが前記異常運転を表すことを特徴とする、請求項24に記載の運転行為の分析・警告方法。
【請求項28】
定量化後の前記安全運転信号が50%と80%の間の値であるとき、前記警告レンジが前記警告運転を表すことを特徴とする、請求項26に記載の運転行為の分析・警告方法。
【請求項29】
定量化後の前記安全運転信号が50%以下の値であるとき、前記警告レンジが前記危険運転を表すことを特徴とする、請求項26に記載の運転行為の分析・警告方法。
【図1】



【図2】

【図3】

【図4】
【図5】

【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−114668(P2013−114668A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2012−60806(P2012−60806)
【出願日】平成24年3月16日(2012.3.16)
【出願人】(598139748)國立交通大學 (92)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成24年3月16日(2012.3.16)
【出願人】(598139748)國立交通大學 (92)
【Fターム(参考)】
[ Back to top ]