
運転記録装置および地図作成システム
【課題】ヒヤリハット事例が発生した場合の対象や事象を解析するための情報を取得することが可能な運転記録装置およびヒヤリハット地図を作成する地図作成システムを提供する。
【解決手段】時系列の画像データから2次元オプティカルフローを算出する3次元計測部1と、2次元オプティカルフローに基づいて、自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出する障害物検出部2と、障害物判定候補領域に対して、距離情報に基づいて、自車両と障害物判定候補領域に写し出されている物体とが衝突するか否かを判定し、衝突までの時間が、回避可能時間に比較して余裕がない場合にはトリガ信号を発する衝突可能性判定部3と、トリガ信号のタイミングで、画像データを記録する記録部4と、画像データが記録された時点での位置情報を記録部4に与える位置情報取得部5とを備えている。
【解決手段】時系列の画像データから2次元オプティカルフローを算出する3次元計測部1と、2次元オプティカルフローに基づいて、自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出する障害物検出部2と、障害物判定候補領域に対して、距離情報に基づいて、自車両と障害物判定候補領域に写し出されている物体とが衝突するか否かを判定し、衝突までの時間が、回避可能時間に比較して余裕がない場合にはトリガ信号を発する衝突可能性判定部3と、トリガ信号のタイミングで、画像データを記録する記録部4と、画像データが記録された時点での位置情報を記録部4に与える位置情報取得部5とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ステレオカメラを用いて得られた3次元情報に基づいて算出された速度情報、車間距離情報等を用いて進路上の障害物を検出し、当該障害物との衝突の可能性を判定して、ヒヤリハット情報として記録する運転記録装置、および運転記録装置に蓄積されたヒヤリハット情報に基づいて状況を解析し、ヒヤリハット地図を作成する地図作成システムに関する。
【背景技術】
【0002】
交通事故の削減は陸運業界において重要な課題である。運転者教育に際しては、事故に至る寸前の事例、いわゆるヒヤリハット事例に基づいて作成されたヒヤリハット地図が重要との認識が広がっている。これは、ヒヤリハット地点では、どのような対象に対して、どのような配慮をした運転を行うのが良いかを事前に把握しておくことが、事故防止に有効と考えられているからである。
【0003】
例えば 特許文献1では、運転者による車両の操作情報に基づき、運転者が運転中にヒヤリハット事例に遭遇して緊急的に行われた操作が発生したと推定した場合は、当該情報および車両の走行情報および位置情報を情報センターに送信し、情報センターにおいてそれらの情報に基づいてヒヤリハット地図を作成する構成が開示されている。
【0004】
また、特許文献2においては、車両に搭載されたドライブレコーダーにヒヤリハット事例が発生した地点の情報を保存しておき、GPS(Global Positioning System)からの位置信号に基づいて車両がヒヤリハット地点に接近していると判断された場合には、運転者に警告を与える構成が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−323281号公報
【特許文献2】特開2008−65541号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述した何れの先行技術においても、車両の走行情報および位置情報はヒヤリハット地図に含まれてはいるが、ヒヤリハット事例の対象や事象は含まれていない。これは、位置情報はGPSにより自動的に地図上に記録することができるが、ヒヤリハット事例が発生した対象や事象については、記録された画像や、運転者からの聞き取りに基づいて、人手により解析して地図上に記録しなければならず、自動化が難しかったからである。ヒヤリハット事例の対象や事象が含まれていないヒヤリハット地図では、運転者は何に注意すべきかが判らず、効果が半減する。
【0007】
本発明は上記のような問題点を解消するためになされたもので、ヒヤリハット事例が発生した場合の対象や事象を解析するための情報を取得することが可能な運転記録装置およびヒヤリハット地図を作成する地図作成システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る運転記録装置の第1の態様は、車両に搭載されたステレオカメラで撮影された画像データから3次元画像情報を取得する3次元計測部と、前記3次元計測部で算出された3次元画像情報に基づいて、自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出する障害物検出部と、前記障害物検出部で検出された前記障害物判定候補領域に対して、距離情報に基づいて、自車両と障害物判定候補領域内の物体とが衝突する可能性があるか否かを判定する衝突可能性判定部と、前記衝突可能性判定部で、前記自車両が前記物体と衝突する可能性があると判定された場合に、その時点の前後の前記画像データを少なくとも記録する記録部とを備えている。
【0009】
本発明に係る運転記録装置の第2の態様は、前記記録部には、前記衝突可能性判定部で、前記自車両が前記物体と衝突する可能性があると判定された時点での前記自車両の位置情報が記録される。
【0010】
本発明に係る運転記録装置の第3の態様は、前記記録部には、前記物体の大きさの情報、動きの情報および速度情報がさらに記録される。
【0011】
本発明に係る運転記録装置の第4の態様は、前記障害物検出部は、第1画像内の所定の領域に対し、予め設定された所定値と現在の2次元オプティカルフローとの差を求め、この求めた差が所定の第1閾値以上である場合に、前記第1画像内の前記所定の領域を障害物判定候補領域として抽出する。
【0012】
本発明に係る運転記録装置の第5の態様は、前記障害物検出部における前記予め設定された所定値は、過去の2次元オプティカルフローである。
【0013】
本発明に係る運転記録装置の第6の態様は、前記障害物検出部における前記予め設定された所定値は、前記画像データに写し出された道路面の2次元オプティカルフローである。
【0014】
本発明に係る運転記録装置の第7の態様は、前記衝突可能性判定部は、前記障害物検出部で抽出された前記障害物判定候補領域に対し、前記2次元オプティカルフローおよび前記3次元画像情報に含まれる距離情報に基づいて、3次元オプティカルフローを求め、前記障害物判定候補領域に対し、前記3次元オプティカルフローに基づいて、前記自車両と前記物体との衝突の可能性を判定する。
【0015】
本発明に係る運転記録装置の第8の態様は、前記衝突可能性判定部は、前記自車両を含む立体を仮想した場合に、前記3次元オプティカルフローを含む線分と前記立体の境界面とが交差するか否かを判定することによって、前記自車両と前記物体とが衝突するか否かを判定する。
【0016】
本発明に係る地図作成システムの第1の態様は、運転記録装置の第3の態様の前記記録部に記録された情報を取り込み、ヒヤリハット事例を解析してヒヤリハット地図を作成する地図作成システムであって、前記記録部に記録された前記情報に基づいてヒヤリハット事例を解析し、ヒヤリハット対象およびヒヤリハット事象を分類する判定部と、前記判定部で分類した前記ヒヤリハット対象および前記ヒヤリハット事象を、前記自車両の前記位置情報に基づいて地図上に書き込むことで前記ヒヤリハット地図を作成する地図作成部とを備えている。
【0017】
本発明に係る地図作成システムの第2の態様は、前記判定部は、前記障害物判定候補領域内の前記物体の前記大きさの情報に基づいて、前記ヒヤリハット対象が、自動車、自動二輪車、自転車および人の何れであるかの分類を行うとともに、前記障害物判定候補領域内の前記物体の前記動きの情報および前記速度の情報に基づいて、前記自車両および前記物体の予測進路を取得し、前記自車両および前記物体のそれぞれの前記予測進路の交差角度と前記ヒヤリハット対象の分類結果とに基づいて、前記ヒヤリハット事象を分類する。
【0018】
本発明に係る地図作成システムの第3の態様は、前記判定部は、前記自車両および前記物体のそれぞれの前記予測進路の前記交差角度が60゜以上90゜未満である場合に、前記ヒヤリハット対象が前記自動車であれば、出会い頭によるヒヤリハット事象と分類し、前記ヒヤリハット対象が前記自動二輪車、前記自転車および前記人の何れかである場合は飛び出しによるヒヤリハット事象と分類し、前記交差角度が20゜以上600゜未満である場合に、前記ヒヤリハット対象が前記自動車、前記自動二輪車および前記自転車の何れかである場合は割り込みによるヒヤリハット事象と分類し、前記交差角度が20゜未満である場合に、前記ヒヤリハット対象が前記自動車、前記自動二輪車および前記自転車の何れかである場合は追突によるヒヤリハット事象と分類する。
【発明の効果】
【0019】
本発明に係る運転記録装置の第1の態様によれば、記録部には、衝突可能性判定部で、自車両が物体と衝突する可能性があると判定された場合に、その時点の前後の画像データが記録されているので、記録部の情報に基づいてヒヤリハット事例を解析することができる。
【0020】
本発明に係る運転記録装置の第2の態様によれば、記録部には、衝突可能性判定部で、自車両が物体と衝突する可能性があると判定された時点での自車両の位置情報が記録されているので、ヒヤリハット事例の発生位置を特定することができる。
【0021】
本発明に係る運転記録装置の第3の態様によれば、記録部には、物体の大きさの情報、動きの情報および速度情報も記録されているので、これらの情報を用いてヒヤリハット事例を自動的に解析することができる。
【0022】
本発明に係る運転記録装置の第4の態様によれば、2次元オプティカルフローは、画像中の注目点がどの方向にどれだけ移動しているかを表す速度ベクトルであるので、第1画像内の所定の領域における2次元オプティカルフローを用いることによって、障害物判定候補領域を抽出することができる。
【0023】
本発明に係る運転記録装置の第5の態様によれば、第1画像内の所定の領域に対し、過去の2次元オプティカルフローと現在の2次元オプティカルフローとを比較することによって、障害物判定候補領域を抽出することができる。
【0024】
本発明に係る運転記録装置の第6の態様によれば、道路面は、自車両と衝突の可能性のない物体であるので、障害物判定候補領域を漏れなく抽出することができる。
【0025】
本発明に係る運転記録装置の第7の態様によれば、衝突判定が3次元オプティカルフローによって行われるので、より正確に衝突判定を行うことができる。
【0026】
本発明に係る運転記録装置の第8の態様によれば、3次元オプティカルフローを含む線分と立体の境界面とが交差するか否かという比較的簡易な情報処理で、衝突判定を行うことができる。
【0027】
本発明に係る地図作成システムの第1の態様によれば、ヒヤリハット対象およびヒヤリハット事象が書き込まれたヒヤリハット地図を得ることができる。
【0028】
本発明に係る地図作成システムの第2の態様によれば、ヒヤリハット対象およびヒヤリハット事象の解析を自動的に行うことができる。
【0029】
本発明に係る地図作成システムの第3の態様によれば、比較的簡単な処理でヒヤリハット対象およびヒヤリハット事象の解析を行うことができる。
【図面の簡単な説明】
【0030】
【図1】一般的なヒヤリハット地図の一例を示す図である。
【図2】本発明に係る運転記録装置および地図作成システムの構成を示すブロック図である。
【図3】本発明に係る運転記録装置の動作を説明するフローチャートである。
【図4】時系列ステレオ画像における対応点探索について説明するための図である。
【図5】位相限定相関法により得られた結果を示す図である。
【図6】所定の基準面における2次元オプティカルフローを説明するための図である。
【図7】所定の基準面上に存在する物体における2次元オプティカルフローを説明するための図である。
【図8】領域分割を行って候補領域の抽出を実行する場合における領域分割の仕方を説明するための図である。
【図9】撮影カメラの位置と撮影条件との関係を説明するための図である。
【図10】視差の2乗とオプティカルフローの垂直成分との関係を示す図である。
【図11】視差の2乗とオプティカルフローの垂直成分との関係から得られる直線を示す図である。
【図12】3次元オプティカルフローの算出処理を説明するための図である。
【図13】第1の衝突可能性判定処理を説明するための図である。
【図14】第2の衝突可能性判定処理を説明するための図である。
【図15】画素ブロックに距離情報を振り当てた立体物マップを示す図である。
【図16】ヒヤリハット対象、事象判定部での解析例を示す図である。
【図17】ヒヤリハット対象、事象判定部での解析例を示す図である。
【図18】ヒヤリハット対象、事象判定部での解析例を示す図である。
【図19】ヒヤリハット対象、事象判定部での解析例を示す図である。
【図20】本発明に係る地図作成システムにより得られたヒヤリハット地図の一例を示す図である。
【図21】本発明に係る運転記録装置の変形例の構成を示すブロック図である。
【図22】本発明に係る運転記録装置の変形例の構成を示すブロック図である。
【発明を実施するための形態】
【0031】
<一般的なヒヤリハット地図の一例>
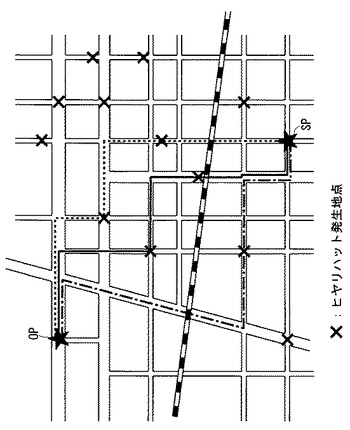
図1に、一般的なヒヤリハット地図の一例を示す。一般的なヒヤリハット地図は、車両の運行領域において過去にどこでヒヤリハット事例が生じたかを示しており、図1においては、出発地点SPと目的地点OPとの間における、車両のこれからの予想運行ルート(複数)を破線で重畳した図となっている。運転者に、このような地図を事前にチェックさせ、記憶させておくことで運転に際して注意を払うべき地点を認識させることができ、有効な安全運転教育ができる。
【0032】
ところが、図1の地図においては、ヒヤリハット事例の発生点は把握できても、どのような対象に対して、どのような配慮をした運転を行うのが良いかが判らない。
【0033】
一般的なドライブレコーダーにおいては、加速度情報などを用いてヒヤリハット事例の発生を判定し、ヒヤリハット事例が発生した場合には、GPSからの位置情報とともにヒヤリハット事例の画像を記録することが可能であるので、それらの情報を用いることで、図1のようなヒヤリハット地図を自動的に作成することができる。しかし、従来のドライブレコーダーからの情報では、発生したヒヤリハット事例の対象や事象を自動的に特定することは困難であり、人手による解析では手間がかかり過ぎ、地図への記録がなされていないというのが実状である。
【0034】
<実施の形態>
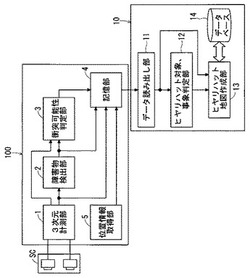
図2は、本発明に係る運転記録装置100および地図作成システム10の構成を示すブロック図である。
【0035】
<運転記録装置の構成>
図2に示すように、運転記録装置100は、車両に搭載されたステレオカメラSCで撮影されたステレオ画像から基準画像の画素ブロックごとに参照画像上の対応点探索を行い、視差を算出して得られる画素ブロックごとの3次元座標から、距離情報を含む3次元画像情報を取得するとともに、時系列の画像データから2次元オプティカルフローを算出する3次元計測部1と、3次元計測部1で得られた2次元オプティカルフローに基づいて、自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出する障害物検出部2と、障害物検出部2で検出された障害物判定候補領域に対して、距離情報に基づいて、自車両と障害物判定候補領域に写し出されている物体とが衝突するか否かを判定し、衝突までの時間が、回避可能時間に比較して余裕がない場合にはトリガ信号を発する衝突可能性判定部3と、衝突可能性判定部3がトリガ信号を発するタイミングで、3次元計測部1を介して与えられる、その時の画像データを記録する記録部4と、自車両の位置情報を取得し、記録部4での画像データが記録された時点での位置情報を記録部4に与える位置情報取得部5とを備えている。次に、各構成について説明する。
【0036】
<ステレオカメラ>
ステレオカメラSCは、車両等の自車両に搭載され、ステレオ時系列画像を取得するものである。ステレオカメラSCは、例えばCCD(Charge-Coupled Devices)等の撮像素子を有するカメラであり、適当な距離だけ離間させて左右に設置された2つのカメラを備えて構成される。ステレオカメラSCにおける左右それぞれのカメラは、被写体を同じタイミングで撮像し、左右一対の画像を得る。なお、左右のカメラの収差は良好に補正されており、かつ、これらは相互に平行に設置されていることが好ましい。このように、ステレオカメラにおいて、各カメラが平行に設置されることで、平行化された画像が得られ、これら画像から容易に3次元画像情報を得ることができる。なお、3次元画像情報とは、ステレオ時系列画像から得ることができる、カメラの位置を基準とした3次元座標、2次元および3次元動きベクトル等をいう。このステレオカメラSCは、一定周期で随時撮像を繰り返している。また、ステレオカメラSCが被写体を撮像し、生成するステレオ画像は、立体情報を含んでいる。
【0037】
なお、例えば、ステレオカメラの代わりに単眼カメラを用いる場合は、3次元情報の取のために、3次元計測ができる機器、例えば、レーザやミリ波による計測器を備える構成とし、この計測器により、立体情報を取得すれば良い。
【0038】
<3次元計測部>
3次元計測部1は、ステレオカメラで得られた画像の3次元画像情報を算出する。具体的には、3次元計測部1は、画像上における点の撮像位置を基準とする3次元座標および動きベクトル等を求める。時系列ステレオ画像をもとに、3次元画像情報(前記3次元座標および動きベクトル等)を得る方法は公知の方法を用いれば良い。
【0039】
具体的には、ステレオ画像における3次元画像情報は、ある画像上の点に対応する点を、その画像に対応する画像上から探索する(対応点探索)ことで得られる。例えば、一対のステレオ画像どうしにおいて、対応点探索を行うことで、その時刻における3次元座標が得られる。
【0040】
また、例えば、同一のカメラで撮像した、撮像時間の異なる被写体の画像どうしにおいて、対応点探索を行うことで、その点の動きベクトルが求められる。なお、ステレオカメラSCがステレオカメラでなく、単眼カメラである場合には、レーザやミリ波による3次元計測器等を備える。そして、3次元計測部1は、これらの測定器による計測値および、単眼カメラにより被写体が撮像されて生成された時系列画像を関連づけて、3次元画像情報を得る。例えば、この単眼カメラの光軸と同一方向に出射された、レーザまたはミリ波による3次元計測により求められた立体情報を、単眼カメラにより撮像された被写体の画像と関連づければ良い。
【0041】
対応点探索法として、基準画像上の任意の注目点に対応する参照画像上の点(対応点)を探索して求める相関法がある。なお、参照画像は、基準画像に対応する画像である。 具体的には、ステレオ画像においては、同時刻に撮像した一対の画像のうち一方が基準画像であり、他方は参照画像である。また、時系列画像においては、同一のカメラで撮影された画像のうち、時間的に前の画像が基準画像であり、時間的に後の画像が参照画像である。この基準画像上の注目点に対してテンプレートが設定され、このテンプレートと対応する参照画像上のウィンドウが探索され、この探索されたウィンドウから対応点が求められる。
【0042】
以下に、3次元計測部1により行われる、具体的な対応点探索について説明する。ステレオカメラSCにより生成されたステレオ画像の一方は基準画像とされ、その基準画像に注目点が設定され、基準画像上に注目点を含むテンプレートが設定される。ここで、テンプレートとは基準画像において一定の領域で区切られた範囲であって、その範囲内における各画素の輝度値等の情報(画像パターン)を有している。そして、このテンプレートと、当該基準画像と対応する参照画像(前記ステレオ画像における他方の画像)において複数設定されたウィンドウとの相関値(類似度)が算出され、相関値に基づいて、これらテンプレートとウィンドウとが対応しているか否かが判断される。
【0043】
なお、ウィンドウとは参照画像において複数生成された、テンプレートと同一の大きさの範囲の領域であって、その範囲内における各画素の輝度値等の情報(画像パターン)を有している。上述のように、テンプレートとウィンドウとの画像パターンから相関値が求められる。例えば、テンプレートと何れかのウィンドウとの相関値が求められ、仮に、これらの相関値が低いことから、これらが対応しないと判断されれば、例えば1画素何れかの方向にずれた位置に生成されたウィンドウとテンプレートとの相関値が求められる。このようにして、順次ウィンドウが変更されながら相関値が求められ、相関値がピークの値をとるウィンドウが探索される。そして、テンプレートの画像パターンと相関値がピークである画像パターンを有するウィンドウが、テンプレートに対応するウィンドウであると求められる。
【0044】
次に、相関値の具体的な算出方法について説明する。具体的には、関数を用いて相関値を求める。その方法としては、例えば、SAD(Sum of Absolute Difference)法、SSD(Sum of Squared Difference)法(2乗残差法)、NCC(Normalize cross Correlation)法(正規化相互相関法)等が知られている。
【0045】
SAD法は、テンプレートおよびウィンドウの輝度値の絶対値による総和を求める関数を用いる方法であって、この関数を用いてテンプレートおよびウィンドウごとの相関値が求められる。また、上記SAD法等に比べてロバスト性を有する相関値演算の方法もある。具体的には、この方法は、画像パターンの周波数分解信号から、振幅成分を抑制した位相成分のみの信号を用いて類似度演算を行う方法である。そして、この方法を用いることで、ステレオ画像における左右カメラの撮影条件の差や、ノイズなどの影響を受けにくく、ロバスト性を有する相関値演算が実現可能である。
【0046】
なお、画像パターンの周波数分解信号を計算する手法は、例えば高速フーリエ変換(FFT)、離散フーリエ変換(DFT)、離散コサイン変換(DCT)、離散サイン変換(DST)、ウエーブレット変換、アダマール変換などが知られている。ここでは、このようなロバスト性を有する相関値演算のうち位相限定相関法(以下、POC法という)について簡単に説明する。
【0047】
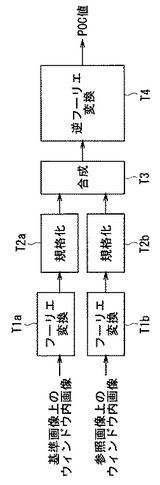
POC法においても、基準画像上にテンプレートが設定され、参照画像上に同じ大きさを持つウィンドウが設定される。そして、テンプレートと各ウィンドウとの相関値(POC値)が計算され、その相関値からテンプレートに対応するウィンドウが求められる。まず、基準画像のテンプレートおよび参照画像のウィンドウは、それぞれ2次元離散フーリエ変換され、規格化された後、合成され、2次元逆離散フーリエ変換される。このようにして、相関値であるPOC値が求められる。また、POC値はウィンドウ内における画素ごとに離散的に求まるため、画素ごとの相関値を求めることができる。この点が、ウィンドウごとの相関値を求める、上述のSAD法等とは異なる。このように、POC法においては、ウィンドウ内における画素ごとに相関値を求めることができるので、ウィンドウの設定範囲を絞り込むことが容易であり、対応点を求める処理が高速でできるという効果を奏する。また、上記POC法等のロバスト性を有する相関値演算方法においては、ウィンドウ内における画素ごとに相関値を求めることができるため、SAD法等のようにウィンドウを1画素ずつずらして相関値を求めなくても、対応するウィンドウを探索することができる。
【0048】
POC法においては、テンプレートとの相関値を求める際に、ウィンドウを複数画素分ずらしながら、相関値の算出を行っても良い。具体的に、どれだけずらすことができるかは、対応点の探索可能範囲に依存するが、一般的には、ウィンドウサイズの半分くらいであるといわれている。つまり、例えば、ずらされたウィンドウと、ずらされる前のウィンドウとが、ウィンドウサイズの半分程度において重なるように設定されれば良い。例えば、基準画像と参照画像との視差の最大を128画素とし、ウィンドウサイズを31×31とし、POC法により探索できる範囲をウィンドウの重心位置に対して±8画素と仮定すると、この視差を探索するためには、ウィンドウは16画素ずつずらされれば良いので、8個のウィンドウが設定されれば良い。
【0049】
3次元計測部1では、時系列画像における所定の第1時刻tに取得された第1画像、および、前記時系列画像における所定の第1時刻tと異なる第2時刻t+△tに取得された第2画像に対して、上述した対応点探索により対応点を求め、対応点どうしの差によって2次元オプティカルフローを算出する。
【0050】
<障害物検出部>
障害物検出部2では、3次元計測部1で求めた2次元オプティカルフローに基づいて、自車両と衝突する可能性のある第1画像内の点または領域を障害物判定候補領域(候補領域)として抽出するものである。より具体的には、例えば、第1画像内の所定の領域に対し、予め設定された所定値と現在の2次元オプティカルフローとの差を求め、この求めた差が予め設定された所定の第1閾値以上である場合に、第1画像内の所定の領域を候補領域として抽出する。そして、この予め設定された所定値は、例えば、過去の2次元オプティカルフローを用いても良いし、時系列画像の何れか1つの画像に写し出された道路面の2次元オプティカルフローであっても良い。そして、この道路面の2次元オプティカルフローは、ステレオカメラSCの設置条件に基づいて求められたものであっても良い。
【0051】
また、障害物検出部2では、抽出された候補領域に対し、自車両と候補領域に写し出されている物体までの距離を取得する。本実施形態では、撮影にステレオカメラSCを用いることから、距離情報は、このステレオカメラSCによって取得された1組のステレオ画像に基づいて、抽出された候補領域におけるステレオ画像間の対応点を対応点探索処理によって抽出することで、自車両と候補領域に写し出されている物体までの距離情報を取得する。
【0052】
<衝突可能性判定部>
衝突可能性判定部3では、障害物検出部2で抽出された候補領域に対し、障害物検出部2で取得した距離情報に基づいて、自車両と候補領域に写し出されている物体とが衝突するか否かを判定する。
【0053】
例えば、障害物検出部2で抽出された候補領域に対し、2次元オプティカルフローおよび距離情報に基づいて、3次元オプティカルフローを求め、抽出された候補領域に対して3次元オプティカルフローに基づいて、自車両と候補領域に写し出されている物体とが衝突するか否かを判定する。
【0054】
この判定は、例えば、自車両を含む立体を仮想した場合に、3次元オプティカルフローを含む線分と立体の境界面とが交差するか否かを判定することによって、自車両と候補領域に写し出されている物体とが衝突するか否かを判定する。
【0055】
そして、衝突すると判定した場合は、物体までの距離と、自車両の速度に基づいて算出した衝突までの時間が、回避可能時間に比較して余裕がない場合には、ヒヤリハット事例が発生したとしてトリガ信号を記録部4に向けて出力する。
【0056】
<記録部>
記録部4では、衝突可能性判定部3からトリガ信号が与えられた場合、当該トリガ信号が与えられる前後に相当する時間Δtf前から、時間Δta後の画像データと、トリガ信号が与えられた時点での位置情報を位置情報取得部5から取得して記録する。なお、画像データは、ステレオカメラで得られた画像データが3次元計測部1を介して与えられるものであり、常時、記録部4に与えられ所定時間だけ記録され、所定時間経過後は上書きされるものである。従って、この所定時間を、Δtfに設定しておけば、トリガ信号が与えられた時点よりΔtf前の画像データは記録部4に残っており、それをΔtf前の画像データとして使用することができる。
【0057】
ここで、位置情報取得部5はGPSの情報を受ける受信部であり、トリガ信号が与えられるタイミングでGPSから受信した位置情報を、ヒヤリハット事例が発生した地点の位置情報として記録部4に与える。
【0058】
また、記録部4には、衝突可能性判定部3で得られた、衝突の可能性のある物体の大きさ、および物体の移動方向、移動速度などの情報も記録される。
【0059】
<運転記録装置の動作>
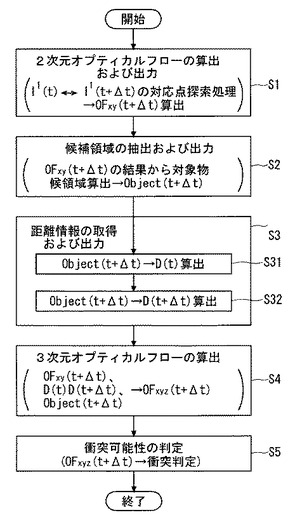
次に、運転記録装置100の動作について、図3に示すフローチャートを用いて説明する。
【0060】
運転記録装置100の動作が開始されると、ステレオカメラSCの2つのカメラがタイミングを合わせて(同期して)所定の時間間隔で撮影を行い、それぞれのカメラで撮影された時系列画像(時系列画像データ)が3次元計測部1に与えられる。
【0061】
3次元計測部1では、ステレオカメラSCによって取得された時間的に異なる2つの時系列画像データI(t)、I(t+△t)において対応点探索処理を行って、対応点を探索し、対応点どうしの差を求めることによって、2次元オプティカルフローOFxy(t+△t)を算出し、この算出した2次元オプティカルフローOFxy(t+△t)を障害物検出部2および衝突可能性判定部3にそれぞれ出力する(ステップS1)。
【0062】
ここで、時系列画像データI(t)、I(t+△t)は、ステレオカメラSCの2つのカメラのどちらで撮影された時系列画像の何れであっても良い。以下では、一方のカメラで撮影された時系列画像I1(t)、I1(t+△t)を用いるものとする。なお、添え字の「1」は一方のカメラで撮影されたことを表し、他方のカメラで撮影された場合は添え字として「2」を用いる。
【0063】
続いて、障害物検出部2において、3次元計測部1によって算出された2次元オプティカルフローOFxy(t+△t)に基づいて、衝突可能性判定部3によって衝突の可能性の有無を判定すべき点または領域を衝突可能性判定候補領域(候補領域)DAob(t+△t)として抽出し、この抽出した候補領域DAob(t+△t)を衝突可能性判定部3に出力する(ステップS2)。
【0064】
また、障害物検出部2では、距離情報を取得するステップS3において、抽出した候補領域DAob(t+△t)に対し、ステレオカメラSC(すなわち、自車両)から候補領域DAob(t+△t)に撮像されている物体までの距離を距離情報D(t)として時刻tについて取得し(ステップS31)、また、時刻t+△tについて距離情報D(t+△t)取得し(ステップS32)、これらの距離情報D(t)およびD(t+△t)を衝突可能性判定部3に出力する。
【0065】
次に、衝突可能性判定部3は、障害物検出部2によって抽出された候補領域DAob(t+△t)に対し、3次元計測部1で算出された2次元オプティカルフローOFxy(t+△t)および障害物検出部2によって取得された距離情報D(t)、D(t+△t)に基づいて、3次元オプティカルフローOFxyz(t+△t)を算出する(ステップS4)。
【0066】
その後、衝突可能性判定部3では、候補領域DAob(t+△t)に対し、この算出した3次元オプティカルフローOFxyz(t+△t)に基づいて衝突の可能性があるか否かを判定する。
【0067】
そして、判定の結果、衝突の可能性があると判定された場合には、衝突可能性判定部3は、その旨とともに、衝突の可能性がある物体までの距離、その大きさおよび衝突までの時間等を記録部4に出力する。なお、これらの情報を車載の表示装置に表示し、併せてブザー等によって運転者に警告を与える構成としても良い。
【0068】
次に、図3に示した各ステップをより具体的に説明する。
【0069】
<ステップS1:2次元オプティカルフローの算出処理>
先に説明したように、3次元計測部1では、2つの時系列画像データにおいて対応点探索処理を行い、対応点どうしの差によって2次元オプティカルフローOFxy(t+△t)を算出するが、以下においては、この対応点探索処理に位相限定相関法(POC)を用いる場合について説明する。
【0070】
図4は、位相限定相関法を用いた対応点探索処理を説明するための図である。位相限定相関法を用いた対応点探索処理では、まず基準画像上のウィンドウ内の画像と、参照画像上のウィンドウ内の画像とが抽出される。これらの画像については、次の数式のように表されるものとする。
【0071】
【数1】

【0072】
ここで、上記の数式におけるf(n1,n2)およびg(n1,n2)は、基準画像上のウィンドウ内の画像および参照画像上のウィンドウ内の画像を示している。また、N1およびN2は、例えばN1=2M1+1、N2=2M2+1と設定されている。
【0073】
次に、基準画像および参照画像のウィンドウ内の各画像に対し、次の数式に示す演算式を用いた2次元のフーリエ変換処理T1a、T1bを行う。
【0074】
【数2】
【0075】
なお、上記の数式のただし書におけるWの添え字Pには、N1、N2が代入され、またkの添え字sには、1、2が代入される。
【0076】
このようなフーリエ変換処理T1a、T1bが施された各画像に対しては、次の数式に示す演算式を用いて、画像の振幅成分を除去するための規格化処理T2a、T2bが行われる。
【0077】
【数3】
【0078】
規格化処理T2a、T2bが完了すると、次の数式に示す演算式を用いた合成処理T3が行われる。
【0079】
【数4】
【0080】
合成処理T3とともに、次の数式に示す演算式を用いた2次元の逆フーリエ変換処理T4が行われる。これにより、各画像間の相関演算が実施されることとなり、その結果(POC値)が出力される。
【0081】
【数5】
【0082】
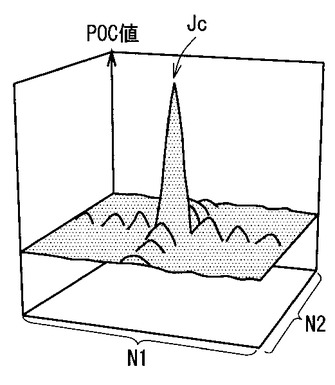
以上の位相限定相関法を用いた処理により、例えば図5に示すような結果が得られる。この図5においては、ウィンドウ(N1×N2)内で相関が高い箇所のPOC値が大きくなっており、POC値のピークJcに対応する参照画像上のウィンドウ内の位置が、基準画像上のウィンドウの中心点(指定点)に対応した参照画像上の対応点に相当することとなる。
【0083】
このような対応点探索によって求められた対応点に基づいて得られた2次元オプティカルフローは、輝度値が比較的急激に変化する部分でも誤差が少なく、ノイズにも強いという特徴がある。
【0084】
<ステップS2:衝突可能性判定候補領域の抽出処理)
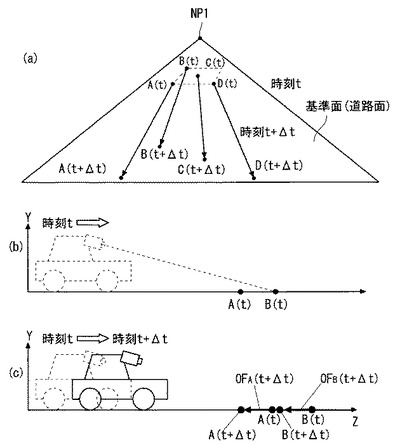
図6は、所定の基準面における2次元オプティカルフローを説明する図である。図6の(a)部には、2次元オプティカルフローを示し、図6の(b)部には、基準面上の点Aおよび点Bについて、進行方向zにおける時刻tの位置を示し、図6の(c)部には、基準面上の点Aおよび点Bについて、進行方向zにおける時刻t+△tの位置を示す。
【0085】
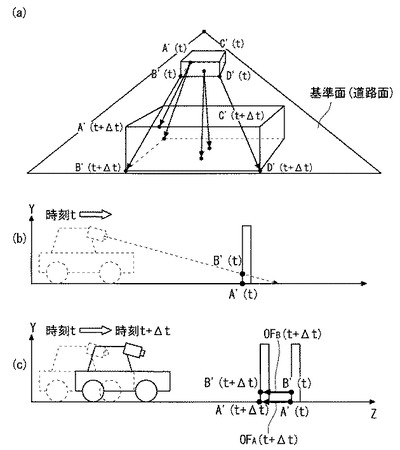
図7は、所定の基準面上に存在する物体における2次元オプティカルフローを説明する図である。図7の(a)部には、2次元オプティカルフローを示し、図7の(b)部には、物体上の点A’および点B’について、進行方向zにおける時刻tの位置を示し、図7(c)部には、物体上の点A’および点B’について、進行方向zにおける時刻t+△tの位置を示す。
【0086】
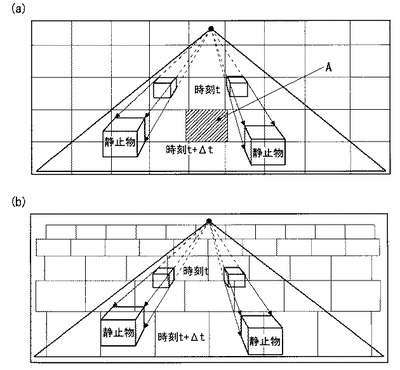
図8は、領域分割を行って候補領域の抽出を実行する場合における領域分割の仕方を説明する図である。図8の(a)部には、等面積で分割する場合における各領域を示し、図8の(b)部には、不等面積で分割する場合における各領域を示す。
【0087】
一般に、自車両が移動方向を変えずに移動した場合(例えば、直進移動した場合)、静止物体の2次元オプティカルフローは、所定の消失点に向かうが、高さが異なる2点では、その向かう消失点が互いにずれる(異なる)。このため、例えば、図6の(a)部に示す点A、B、C、Dは、共通な所定の平面(例えば、道路面)上にある点であるため、それら各A、B、C、Dの点2次元オプティカルフローは、図6の(a)部に示すように、互いに共通な1つの消失点NP1に向かい、この消失点NP1から放射状に延びる。一方、所定の平面(この例では道路面)上に存在する物体上における所定の平面からある高さにある点、例えば、図7の(a)部に示す点A’および点C’は、高さが異なって、高さ方向Yの成分があり、これら点A’および点C’の各2次元オプティカルフローは、図7の(a)部に示すように、所定の平面上の点の2次元オプティカルフローにおける消失点NP1と異なる消失点(図示せず)に向かい、消失点NP1とは異なる。
【0088】
従って、障害物検出部2は、予め設定された所定の基準面における2次元オプティカルフローと基準面上に存在する物体における2次元オプティカルフローとが互いに異なることから、3次元計測部1で算出された2次元オプティカルフローOFxy(t+△t)に基づいて、候補領域DAob(t+△t)を抽出することができる。
【0089】
より具体的には、所定の基準面として道路面が用いられ、微小時間△tの間において自車両の速度がほぼ変化しないと仮定した場合、図6の(b)部および図6の(c)部に示すように、基準面(道路面)上の点の2次元オプティカルフローは、同じ移動量を持つとして算出されるが(OFxy(t+△t)−OFxy(t)=0)、基準面(道路面)上にない物体上の点の2次元オプティカルフローは、図7の(b)部および図7の(c)部に示すように、同じ移動量を持つものとしては算出されない(OFxy(t+△t)−OFxy(t)≠0)。
【0090】
このため、障害物検出部2は、予め設定された所定の画素に対し、時刻t−△tの画像データと時刻tの画像データから2次元オプティカルフローOFxy(t)を求めると共に、時刻tの画像データと時刻t+△tの画像データから2次元オプティカルフローOFxy(t+△t)を求め、これら2次元オプティカルフローの差(OFxy(t+△t)−OFxy(t))を求め、この結果の絶対値が予め設定された所定の閾値Th1以下であるか否かを判定することによって、候補領域DAob(t+△t)を抽出することができる。結果の絶対値が所定の閾値Th1以下である場合には、その画素は、候補領域DAob(t+△t)内の画素ではないと判定され、前記結果の絶対値が所定の閾値Th1を超える場合には、その画素は、候補領域DAob(t+△t)内の画素であると判定される。
【0091】
すなわち、障害物検出部2は、第1画像内の所定の領域に対し、過去の2次元オプティカルフローと現在の2次元オプティカルフローとの差を求め、この求めた差の絶対値が所定の閾値Th1以上であるか否かを判定することによって、候補領域DAob(t+△t)を抽出することができる。
【0092】
ここで、所定の閾値Th1は、画像上の領域ごとに変更しても良い。画像の上部領域は、自車両から比較的遠い位置にある物体の画像であり、画像の下部領域は、自車両から比較的近い位置にある物体の画像である。このため、所定の閾値Th1は、画像の下部領域から上部領域に行くに従って小さくなっても良い。このように所定の閾値Th1を変更することによって、計測誤差に強く、ロバスト性が向上する。
【0093】
また、障害物検出部2によって候補領域DAob(t+△t)内の画素であるか否かが判定される所定の画素は、画像データの全画素(計測点)であっても良く、また、図8に示すように、画像データを複数の画素を持った領域に分割し、各領域内の各画素(局所領域の計測点)であっても良い。すなわち、所定の画素は、所定の間隔で間引かれた画素であっても良い。図8には、各領域が矩形である場合が示されている。
【0094】
そして、この領域は、図8の(a)部に示すように、互いに等面積であっても良いが、図8の(b)部に示すように、互いに異なる面積であっても良い。この場合において、各分割領域(局所領域)の面積は、画像の下部領域から上部領域に行くに従って狭くなっても良い。このように分割領域(局所領域)の面積を変更することによって、計測誤差に強く、ロバスト性が向上する。
【0095】
なお、この判定手法によれば、判定対象の画素が、自車両の進行方向と同じ方向に進行しており等速運動している物体上の画素である場合や、遠距離に存在しており消失点付近に存在している画素である場合は、OFxy(t+△t)=0、OFxy(t)=0となることから、衝突可能性判定候補領域DAob(t+△t)として抽出されないが、この画素は、衝突の可能性のない物体を捉えた画素であるため、衝突可能性判定候補領域DAob(t+△t)として抽出されなくても問題とならない。
【0096】
また、道路面の2次元オプティカルフローは、実際に道路面を予め計測しておきデータとして保持しておいても良いが、例えば、次のように撮影カメラ2の設置条件から求めることもできる。
【0097】
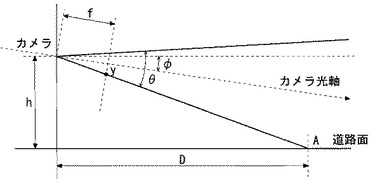
図9は、撮影カメラの位置と撮影条件との関係を説明するための図である。図9に示すように、焦点距離fで画角θであるカメラが、路面から高さhの位置に、前進方向Zに対しピッチ方向の傾きφで自車両に取り付けられ、パン方向およびロール方向の傾きが実質的に0であるとする。このような場合では、画像上の座標yと道路面までの距離Dとの関係は、下記の数式のように表される。
【0098】
【数6】
【0099】
従って、2次元オプティカルフローの垂直成分△yは、下記の数式のように表され、そして、2次元オプティカルフローの水平成分△xは、下記の数式のように表される。
【0100】
【数7】
【0101】
【数8】
【0102】
ここで、vは、自車両の速度であり、△tは、2つの画像間の撮影時間間隔(フレーム周期)であり、yは、カメラからZ方向に離れた路面上の点Aを表す画像上の点の垂直成分であり、xは、カメラからZ方向に離れた路面上の点Aを表す画像上の点の水平成分であり、αは、画素ピッチをpとし画素数をNとすると、α=f/p=N/(2θ)である。
【0103】
なお、速度vは、以下の工程(a-1)〜(a-5)が順次に実行されることで算出することができる。
【0104】
(a-1)フレーム周期分の時間差を有して撮影されるステレオ画像から各注目点に係る視差dの2乗とオプティカルフローの垂直成分Δyとが求められる。
【0105】
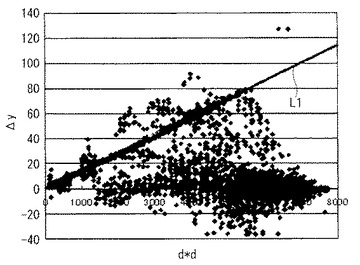
(a-2)視差dの2乗とオプティカルフローの垂直成分Δyとを座標軸とする2次元座標空間に各注目点に係る数値がプロットされる。図10は、各注目点に係る視差dの2乗とオプティカルフローの垂直成分Δyとの関係を示す図である。図10では、横軸が視差dの2乗を示し、縦軸がオプティカルフローの垂直成分Δyを示す2次元座標空間に各注目点に係る数値がプロットされた状態が示されている。
【0106】
(a-3)最小二乗法、ハフ変換等の直線算出手法が用いられて、図10で示されるようにプロットされた各点によって描かれる直線L1が検出される。
【0107】
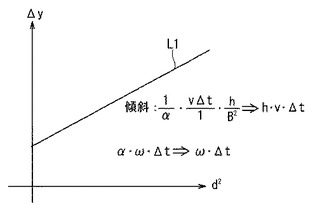
(a-4)直線L1の傾きおよび切片が検出される。
【0108】
(a-5)上記工程(a-4)において検出された直線L1の傾きから自車両の走行速度(前進速度)vが算出されるとともに、上記工程(a-4)において検出された直線L1の切片から自車両のピッチ方向における角速度ωが算出される。ここで、直線L1は、図11で示されるように、Δyおよびd2を変数とし、(1/α)・(v・Δt/1)・(h/B2)を傾きとし、−α・ω・Δtを切片とする直線である。なお、カメラパラメータα、基線長B、およびフレーム周期Δtは、ステレオカメラSCの設計によって決まる定数である。従って、直線L1の傾きと切片とが検出されれば、定数α,B,Δtが用いられて、h・vの値と角速度ωの値とが算出される。そして、道路面を基準としたステレオカメラSCの高さhとして、予め設定された初期値が採用されれば、自車両の走行速度vが求められる。
【0109】
なお、上記のようにステレオ画像から速度を検出する方法以外に、車載の速度センサからの情報を用いても良い。
【0110】
<ステップS3:距離情報の算出処理>
障害物検出部2では、抽出された候補領域DAob(t+△t)に対し、自車両から候補領域DAob(t+△t)に撮像されている物体までの距離情報をステレオカメラによるステレオ画像によって取得する。
【0111】
すなわち、ステレオ画像から候補領域DAob(t+△t)およびこれに対応する時刻tの領域の対応点がそれぞれ対応点探索処理によって探索され、これら探索された対応点の視差から距離情報D(t+△t)および距離情報D(t)が求められる。ステレオカメラSCの2つのカメラの中央位置から物体までの距離と視差とは、三角測量の原理に基づいて一義的に対応付けられる。なお、対応点探索を行うに当たって、収差補正および平均化処理が実行されても良い。この平均化処理は、各カメラの光軸方向および光軸周りの回転角および視点の高さを揃えた画像に変換する処理である。
【0112】
<ステップS4:3次元オプティカルフローの算出処理)
衝突可能性判定部3は、障害物検出部2で抽出された衝突可能性判定候補領域DAob(t+△t)に対し、2次元オプティカルフローOFxy(t+△t)および距離情報D(t)、D(t+△t)に基づいて、3次元オプティカルフローOFxyz(t+△t)を算出する。
【0113】
2次元オプティカルフローは、画像中の注目点(所定の点)が2次元画像上でどの方向にどれだけ移動しているかを表す速度ベクトルであるが、3次元オプティカルフローは、画像に奥行き方向(自車両の進行方向)の成分を加えた実空間上での速度ベクトルである。
【0114】
図12は、3次元オプティカルフローの算出処理を説明する図である。障害物検出部2によって抽出された候補領域DAob(t+△t)内における所定の画素(計測点)に対し、以下の処理が実行され、3次元オプティカルフローOFxyz(t+△t)が算出される。
【0115】
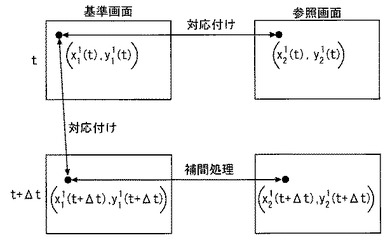
図12に示すように、まず、時刻tにおける基準画像I1の点PBASE,t(x1(t)、y1(t))に対応する、時刻t+△tにおける基準画像I1の点PBASE,t+△t(x1(t+△t)、y1(t+△t))が求められ、時刻tにおける基準画像I1の点PBASE,t(x1(t)、y1(t))に対応する、時刻tにおける参照画像I2の点PREF,t(x2(t)、y2(t))が求められる。次に、時刻t+△tにおける基準画像I1の点PBASE,t+△t(x1(t+△t)、y1(t+△t))に対応する、時刻t+△tにおける参照画像I2の点PREF,t+△t(x2(t+△t)、y2(t+△t))が求められる。
【0116】
ここで、各対応点の探索において、ピクセルレベル(画素レベル)で対応点が存在しない場合がある。このような場合では、ピクセルレベルで対応点を含む画素が4点探索され、これら4点の画素の画素値と対応点の画素値との比率に応じてこれら4点の画素から対応点までの距離を決定する補間処理を行うことによって、対応点の位置がサブピクセルレベルで探索される。
【0117】
次に、時刻tにおける基準画像I1の点PBASE,t(x1(t)、y1(t))と、これに対応する、時刻tにおける参照画像I2の点PREF,t(x2(t)、y2(t))とから、3次元再構成によって、計測点に対する時刻tの実空間における位置(X(t)、Y(t)、Z(t))が求められ、時刻t+△tにおける基準画像I1の点PBASE,t+△t(x1(t+△t)、y1(t+△t))と、これに対応する、時刻t+△tにおける参照画像I2の点PREF,t+△t(x2(t+△t)、y2(t+△t))とから、3次元再構成によって、計測点に対する時刻t+△tの実空間におけるステレオカメラを基準とした3次元位置(X(t+△t)、Y(t+△t)、Z(t+△t))が求められる。
【0118】
この3次元再構成は、例えば、いわゆるピンホールカメラモデルが用いられ、3次元空間上と2次元画像上の対応する点を行列で結びつけるキャリブレーションにより各カメラにおける射影行列P1、P2を求め、注目点の左右画像上の座標から最小二乗法を用いて算出することができる。
【0119】
そして、これらの差(X(t)−X(t+△t)、Y(t)−Y(t+△t)、Z(t)−Z(t+△t))として、3次元オプティカルフローOFxyz(t+△t)が算出される。
【0120】
<ステップS5:衝突可能性の判定処理>
衝突可能性判定部3は、障害物検出部2で抽出された候補領域DAob(t+△t)に対し、算出した3次元オプティカルフローOFxyz(t+△t)に基づいて衝突の可能性があるか否かを判定する。
【0121】
図13は、第1の衝突可能性判定処理を説明する図である。図13において、自車両MVを含む立体、ここでは、移動体を囲む立方体CCが仮想され、まず、この立方体CCを構成する各平面(立体の境界面)に対し、3次元オプティカルフローOFxyz(t+△t)を含む線分が交差する交点PCROSS(X,Y,Z)がそれぞれ求められ、各平面の各交点に対し、所定の範囲に含まれる平面があるか否かが判定される。この判定の結果、所定の範囲に含まれる平面が1つでも存在する場合には、障害物検出部2で抽出された候補領域DAob(t+△t)は、衝突の可能性がある物体を撮影している領域であると判定される。
【0122】
ここで、所定の範囲は、ステレオカメラの位置、すなわち、自車両の位置を座標原点(0,0,0)として、X方向判定が−((W+αAREA1)/2)≦PCROSS(X)≦((W+αAREA)/2)であり、Y方向判定が−h+β1≦PCROSS(Y)≦(H−h)+αAREA2であり、そして、Z方向判定がF+αAREA3≦PCROSS(Z)≦B+αAREA3である。ここで、Wは、自車両の幅であり、αAREA1は、衝突をより確実に回避すべく自車両の幅Wに多少余裕を持たせた領域(危険判定領域)であり、Hは、自車両の高さであり、β1は、道路面からの車輪の高さであり、αAREA2は、衝突をより確実に回避すべく自車両の高さHに多少余裕を持たせた領域(危険判定領域)であり、hは、ステレオカメラの設置高さであり、Fは、カメラ設置位置を基準としてフロント側(前方側)における自車両の長さであり、Bは、カメラ設置位置を基準としてリア側(後方側)における自車両の長さであり、そして、αAREA3は、衝突をより確実に回避すべく自車両の長さF、Bに多少余裕を持たせた領域(危険判定領域)である。
【0123】
図14は、第2の衝突可能性判定処理を説明するための図である。図14の(a)部には、時刻tにおける衝突の可能性のある領域を示し、図14の(b)部には、時刻t+△tにおける衝突の可能性のある領域を示す。衝突の可能性の或る領域は、自車両の速度および物体の速度が変化しない場合では、図14に示すように、自車両の進行方向と自車両から物体へ向かう方向、すなわち、物体の3次元オプティカルフローOFxyz(t+△t)とのなす角θは、一定であり、変化しない。このため、衝突可能性判定部3は、障害物検出部2によって抽出された候補領域DAob(t+△t)に対し、自車両の進行方向と物体の3次元オプティカルフローOFxyz(t+△t)とから角θを求め、この角θを各フレーム間で比較することで、衝突の可能性を判定しても良い。
【0124】
また、衝突可能性判定部3では、衝突の可能性がある物体の大きさも算出して、記録部に記録する。すなわち、障害物検出部2で抽出した候補領域について対応点探索処理によって探索された対応点の視差から距離情報が得られているので、当該距離情報に基づいて候補領域内の物体の大きさを算出することができる。
【0125】
図15は画像を例えば4×4画素で1画素ブロックとしてブロック化し、各画素ブロックに距離情報を振り当てた立体物マップである。
【0126】
図15においては、距離情報を0または1で表しており、1が与えられた領域が立体物の輪郭を示している。自車両が衝突する可能性を判定するには、立体物の高さ(Y方向の長さ)よりも幅(X方向の長さ)が重要となるので、候補領域内の物体の大きさとして、幅を算出する。
【0127】
例えば、図15において、高さ方向(Y方向)の位置が近い画素ブロックに着目し、(X1,Y1,Z1)の座標の画素ブロックと(X4,Y4,Z4)の座標の画素ブロックとの組と、(X2,Y2,Z2)の座標の画素ブロックと(X3,Y3,Z3)の座標の画素ブロックとの組との比較を行い、最大値を与える方を立体物の幅W(W=max(X3−X2,X4−X1))として算出する。
【0128】
また、最大のX座標から最小のX座標を差し引くことで立体物の幅W(W=max(X1,X2)−min(X3,X4))を算出しても良い。
【0129】
なお、上記は2次元座標を使用したが、3次元座標を使用して算出しても良い。
【0130】
このようにして算出された立体物の幅のデータを集め、類似する幅を有する立体物どうしでグループ化し、各グループがどのような幅の分布を有するかを分析することで、検出した立体物が何であるかを判定することができる。
【0131】
例えば、検出した立体物の幅が、ある立体物グループの幅の分布に含まれていれば、そのグループに含まれる立体物であると判定することができ、例えば、立体物が人間であるか、あるいは自動車であるかの判定を行うことができる。
【0132】
また、衝突可能性判定部3では、得られた3次元オプティカルフローに基づいて、衝突の可能性がある物体の実空間上での速度ベクトルから、当該物体の移動方向も算出し、動き情報として記録部4に記録する。なお、物体が静止している場合には、静止していることを動き情報として記録部4に記録する。
【0133】
<地図作成システムの構成>
次に、図2に示す地図作成システム10の構成について説明する。図2に示すように地図作成システム10は、データ読み出し部11、ヒヤリハット対象、事象判定部12、ヒヤリハット地図作成部13およびデータベース14を備えている。
【0134】
地図作成システム10は、例えば、タクシーやトラックの営業所等に配置された運行管理を行うコンピュータシステム内に構築される。また、各社の運行管理を行うコンピュータシステムや車載の運転記録装置100から無線通信によりデータを受け取り、各社のデータを一括処理する解析センターのような施設がある場合には、そこのサーバーコンピュータ内に構築しても良い。
【0135】
データ読み出し部11は、運転記録装置100の記録部4が着脱自在のメモリーカードなどの記録メディアである場合は、当該記録メディアを差し込むスロットを有し、当該記録メディアからのデータを読み出してヒヤリハット対象、事象判定部12に与える。
【0136】
ヒヤリハット対象、事象判定部12では、データ読み出し部11で読み出した、運転記録装置100の記録部4のデータに基づいて、どのような対象に対して、どのようなヒヤリハット事象が起きたかの解析を行う。
【0137】
ヒヤリハット地図作成部13では、ヒヤリハット対象、事象判定部12での解析結果に基づいて、ヒヤリハット事例の対象および事象を、データ読み出し部11で運転記録装置100から読み出した位置情報に基づいて地図上に記号等を用いて書き込む。
【0138】
データベース14は、各ドライバーが日々に経験したヒヤリハット事例について、ヒヤリハット対象、事象判定部12で解析した結果を記録し、管理するシステムであり、コンピュータ内の記憶装置が利用される。
【0139】
<解析動作>
次に、ヒヤリハット対象、事象判定部12での解析例について図16〜図19を用いて説明する。
【0140】
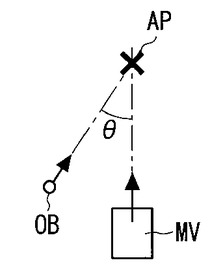
図16〜図19には、自車両MVと対象物OBとが示され、自車両MVおよび対象物OBの速度を実線の矢印で示し、矢印の延長線として破線で予測進路を示している。そして、自車両MVおよび対象物OBの予測進路上で、速度を考慮した所定時間内に衝突する可能性がある地点を衝突推定地点APとして示している。なお、時間が所定時間を越える場合には、回避動作を取る余地があるものとして、ヒヤリハット事例にはならない。
【0141】
図16は、対象物OBが自車両MVの予測進路にほぼ直交する方向から進入してきた事例を示しており、互いの予測進路のなす角度θは60゜以上90゜未満である。これは、対象物OBが自動車である場合は「出会い頭によるヒヤリハット事象」と解析し、対象物OBが自転車、自動二輪車、人である場合は「飛び出しによるヒヤリハット事象」と解析する。
【0142】
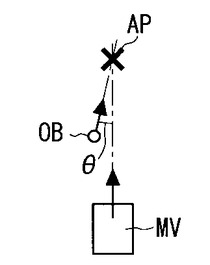
図17は、対象物OBが自車両MVの予測進路に対して20゜以上60゜未満の角度で進入してきた事例を示しており、これは、対象物OBが自動車、自転車、自動二輪車等の車両である場合は「割り込みによるヒヤリハット事象」と解析する。
【0143】
図18は、対象物OBが自車両MVの予測進路に対して平行に近い20゜未満の角度で進入してきた事例を示しており、これは、対象物OBが自動車、自転車、自動二輪車等の車両である場合は「追突によるヒヤリハット事象」と解析する。なお、対象物OBが停止状態で動きベクトルを持たない場合も、これに属するものと解析する。
【0144】
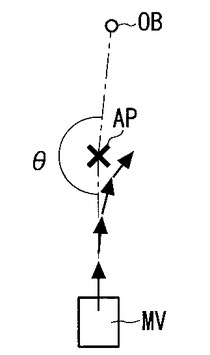
また、運転記録装置100の記録部4には、ヒヤリハット事例発生時の前後の所定時間に渡る自車両の動きベクトルも記録されている。この時系列の動きベクトルの変化をチェックすれば、自車両が直進中か、左折中か、あるいは右折中の事象であるかも判別できる。例えば、図19は、対象物OBと自車両MVの進行方向が真反対であり、互いの予測進路のなす角度θが180゜に近い角度をなす事例を示しており、これは、対象物OBが自動車、自転車、自動二輪車である場合は、自車両MVが「右折中の場合の対向車とのヒヤリハット事象」と解析する。
【0145】
ヒヤリハット対象、事象判定部12での解析結果は、ヒヤリハット地図作成部13に与えられて、ヒヤリハット事例が発生した地点の位置情報に基づいて地図上に書き込まれる。
【0146】
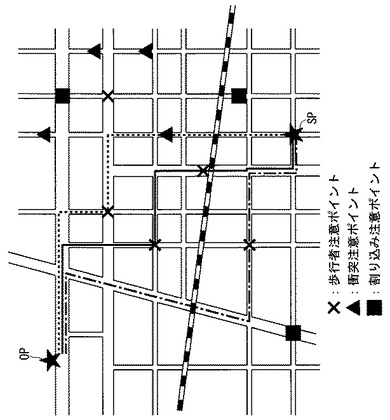
図20に、ヒヤリハット事例の対象および事象を記録したヒヤリハット地図の一例を示す。
【0147】
図20においては、車両の運行領域において過去にどのようなヒヤリハット事例が生じたかを、発生地点のマークを変えることで示している。すなわち、歩行者の飛び出しによるヒヤリハット事象については×印で発生地点を示し、車両との追突によるヒヤリハット事象については▲(塗りつぶし三角)印で発生地点を示し、車両の割り込みによるヒヤリハット事象については■(塗りつぶし四角)印で発生地点を示すことで、ヒヤリハットの注意ポイントを一目瞭然に示している。
【0148】
なお、図20においては、出発地点SPと目的地点OPとの間における、車両のこれからの予想運行ルート(複数)を破線で重畳しており、運転者は、この地図から複数の予想運行ルートのうち、ヒヤリハット事例の少ないルートを選ぶことができ、また、この地図を事前にチェックすることで、注意を払うべき地点を認識することができる。
【0149】
データベース14では、このような地図を蓄積し、また、日々更新することで、運転者の安全運転教育をより有効なものとすることができる。
【0150】
<変形例1>
以上説明した実施の形態に係る運転記録装置100は、障害物の検出や将来の接触の可能性を判定し、障害物との相対速度や、障害物の大きさの情報とともに記録することを主眼とする構成であり、発生したヒヤリハット事例の対象や事象の解析は地図作成システム10で行うものとして説明した。
【0151】
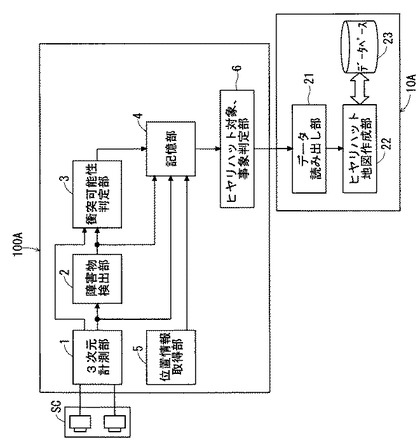
しかし、発生したヒヤリハット事例の対象や事象の解析も運転記録装置で行う構成とし、地図作成システムでは運転記録装置での解析結果を受けてヒヤリハット地図を作成するだけの構成としても良い。図21にはその一例として、運転記録装置100Aを示す。
【0152】
なお、図21において、図2に示した運転記録装置100と同一の構成については同一の符号を付し、重複する説明は省略する。
【0153】
図21に示す運転記録装置100Aにおいては、記録部4に記録された、障害物との接触の可能性や、障害物との相対速度や、障害物の大きさの情報がヒヤリハット対象、事象判定部6に与えられる構成となっており、ヒヤリハット対象、事象判定部6での解析結果および、記録部4に記録された位置情報が地図作成システム10Aに与えられる構成となっている。なお、ヒヤリハット対象、事象判定部6の機能は、図2に示したヒヤリハット対象、事象判定部6の機能と同じである。
【0154】
図21に示すように地図作成システム10Aは、データ読み出し部21、ヒヤリハット地図作成部22およびデータベース23を備えている。
【0155】
データ読み出し部21は、ヒヤリハット対象、事象判定部6の出力を受ける入力インタフェースを有し、データ読み出し部21を介して得られたヒヤリハット対象、事象判定部6での解析結果および位置情報に基づいて、ヒヤリハット地図作成部22でヒヤリハット地図の作成を行う。なお、ヒヤリハット地図作成部22の機能は、図2に示したヒヤリハット地図作成部13の機能と同じである。
【0156】
<変形例2>
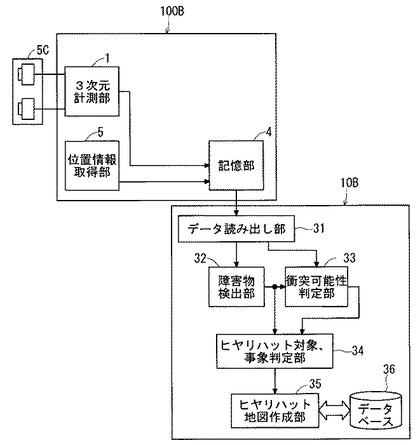
以上説明した実施の形態に係る運転記録装置100は、障害物の検出や将来の接触の可能性を判定し、障害物との相対速度や、障害物の大きさの情報とともに記録することを主眼とする構成として説明したが、障害物の検出や将来の接触の可能性の判定は、地図作成システムで行う構成としても良い。図22にはその一例として、運転記録装置100Bを示す。
【0157】
なお、図22において、図2に示した運転記録装置100と同一の構成については同一の符号を付し、重複する説明は省略する。
【0158】
図22に示す運転記録装置100Bにおいては、3次元計測部1、記録部4および位置情報取得部5を備え、3次元計測部1で得られた2次元オプティカルフローや、3次元画像情報は、位置情報とともに記録部4に記録されるだけの構成となっている。
【0159】
一方、地図作成システム10Bにおいては、データ読み出し部31、障害物検出部32、衝突可能性判定部33、ヒヤリハット対象、事象判定部34、ヒヤリハット地図作成部35およびデータベース36を備えている。
【0160】
データ読み出し部31では、運転記録装置100Bの記録部4に記録された、2次元オプティカルフローや、3次元画像情報を読み出し、障害物検出部32において自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出し、衝突可能性判定部33では、障害物検出部32で検出された障害物判定候補領域に対して、自車両との相対速度を算出し、相対速度および立体物の大きさに基づいて、接触の可能性を判定し、接触までの時間が、回避可能時間に比較して余裕がない場合にはトリガ信号を発し、トリガ信号を発するタイミングで、3次元計測部1を介して与えられ記録部4に記録された画像データと、位置情報取得部5で取得され記録部4に記録された位置情報とに基づいて、ヒヤリハット対象、事象判定部34で、ヒヤリハット事例の対象および事象の解析を行う構成となっている。なお、ヒヤリハット対象、事象判定部34の機能は、図2に示したヒヤリハット対象、事象判定部6の機能と同じである。
【0161】
そして、ヒヤリハット対象、事象判定部34での解析結果および位置情報に基づいて、ヒヤリハット地図作成部35でヒヤリハット地図の作成を行う。なお、ヒヤリハット地図作成部35の機能およびデータベース36の機能は、図2に示したヒヤリハット地図作成部13およびデータベース14の機能と同じである。
【0162】
このように、障害物検出や接触の可能性の判定を地図作成システム10Bで行うので、車載装置である運転記録装置100Bに要求される機能を低減でき、車載装置のコストを低減することができる。
【0163】
<応用例>
本発明に係る運転記録装置および地図作成システムでは、ヒヤリハット事例の対象および事象の解析を自動的に行い、位置情報と対応させることでヒヤリハット地図を作成するものとして説明したが、位置情報と組み合わせるのではなく、ヒヤリハット事例の解析結果を、運転者個人の運転傾向解析に使用することも可能である。
【0164】
すなわち、本願装置を使用することで、各運転者が、どのようなヒヤリハット事例に遭遇したかを統計的に解析することができ、例えば、割り込み事象に対して注意が不足しているという統計結果となった運転者には、運行管理者が注意を促すなどの、教育的配慮を行うことができ、有効な安全運転教育を行うことができる。
【符号の説明】
【0165】
1 3次元計測部
2 障害物検出部
3 衝突可能性判定部
4 記録部
5 位置情報取得部
11 データ読み出し部
12 ヒヤリハット対象、事象判定部
13 ヒヤリハット地図作成部
14 データベース
SC ステレオカメラ
【技術分野】
【0001】
本発明は、ステレオカメラを用いて得られた3次元情報に基づいて算出された速度情報、車間距離情報等を用いて進路上の障害物を検出し、当該障害物との衝突の可能性を判定して、ヒヤリハット情報として記録する運転記録装置、および運転記録装置に蓄積されたヒヤリハット情報に基づいて状況を解析し、ヒヤリハット地図を作成する地図作成システムに関する。
【背景技術】
【0002】
交通事故の削減は陸運業界において重要な課題である。運転者教育に際しては、事故に至る寸前の事例、いわゆるヒヤリハット事例に基づいて作成されたヒヤリハット地図が重要との認識が広がっている。これは、ヒヤリハット地点では、どのような対象に対して、どのような配慮をした運転を行うのが良いかを事前に把握しておくことが、事故防止に有効と考えられているからである。
【0003】
例えば 特許文献1では、運転者による車両の操作情報に基づき、運転者が運転中にヒヤリハット事例に遭遇して緊急的に行われた操作が発生したと推定した場合は、当該情報および車両の走行情報および位置情報を情報センターに送信し、情報センターにおいてそれらの情報に基づいてヒヤリハット地図を作成する構成が開示されている。
【0004】
また、特許文献2においては、車両に搭載されたドライブレコーダーにヒヤリハット事例が発生した地点の情報を保存しておき、GPS(Global Positioning System)からの位置信号に基づいて車両がヒヤリハット地点に接近していると判断された場合には、運転者に警告を与える構成が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−323281号公報
【特許文献2】特開2008−65541号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述した何れの先行技術においても、車両の走行情報および位置情報はヒヤリハット地図に含まれてはいるが、ヒヤリハット事例の対象や事象は含まれていない。これは、位置情報はGPSにより自動的に地図上に記録することができるが、ヒヤリハット事例が発生した対象や事象については、記録された画像や、運転者からの聞き取りに基づいて、人手により解析して地図上に記録しなければならず、自動化が難しかったからである。ヒヤリハット事例の対象や事象が含まれていないヒヤリハット地図では、運転者は何に注意すべきかが判らず、効果が半減する。
【0007】
本発明は上記のような問題点を解消するためになされたもので、ヒヤリハット事例が発生した場合の対象や事象を解析するための情報を取得することが可能な運転記録装置およびヒヤリハット地図を作成する地図作成システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る運転記録装置の第1の態様は、車両に搭載されたステレオカメラで撮影された画像データから3次元画像情報を取得する3次元計測部と、前記3次元計測部で算出された3次元画像情報に基づいて、自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出する障害物検出部と、前記障害物検出部で検出された前記障害物判定候補領域に対して、距離情報に基づいて、自車両と障害物判定候補領域内の物体とが衝突する可能性があるか否かを判定する衝突可能性判定部と、前記衝突可能性判定部で、前記自車両が前記物体と衝突する可能性があると判定された場合に、その時点の前後の前記画像データを少なくとも記録する記録部とを備えている。
【0009】
本発明に係る運転記録装置の第2の態様は、前記記録部には、前記衝突可能性判定部で、前記自車両が前記物体と衝突する可能性があると判定された時点での前記自車両の位置情報が記録される。
【0010】
本発明に係る運転記録装置の第3の態様は、前記記録部には、前記物体の大きさの情報、動きの情報および速度情報がさらに記録される。
【0011】
本発明に係る運転記録装置の第4の態様は、前記障害物検出部は、第1画像内の所定の領域に対し、予め設定された所定値と現在の2次元オプティカルフローとの差を求め、この求めた差が所定の第1閾値以上である場合に、前記第1画像内の前記所定の領域を障害物判定候補領域として抽出する。
【0012】
本発明に係る運転記録装置の第5の態様は、前記障害物検出部における前記予め設定された所定値は、過去の2次元オプティカルフローである。
【0013】
本発明に係る運転記録装置の第6の態様は、前記障害物検出部における前記予め設定された所定値は、前記画像データに写し出された道路面の2次元オプティカルフローである。
【0014】
本発明に係る運転記録装置の第7の態様は、前記衝突可能性判定部は、前記障害物検出部で抽出された前記障害物判定候補領域に対し、前記2次元オプティカルフローおよび前記3次元画像情報に含まれる距離情報に基づいて、3次元オプティカルフローを求め、前記障害物判定候補領域に対し、前記3次元オプティカルフローに基づいて、前記自車両と前記物体との衝突の可能性を判定する。
【0015】
本発明に係る運転記録装置の第8の態様は、前記衝突可能性判定部は、前記自車両を含む立体を仮想した場合に、前記3次元オプティカルフローを含む線分と前記立体の境界面とが交差するか否かを判定することによって、前記自車両と前記物体とが衝突するか否かを判定する。
【0016】
本発明に係る地図作成システムの第1の態様は、運転記録装置の第3の態様の前記記録部に記録された情報を取り込み、ヒヤリハット事例を解析してヒヤリハット地図を作成する地図作成システムであって、前記記録部に記録された前記情報に基づいてヒヤリハット事例を解析し、ヒヤリハット対象およびヒヤリハット事象を分類する判定部と、前記判定部で分類した前記ヒヤリハット対象および前記ヒヤリハット事象を、前記自車両の前記位置情報に基づいて地図上に書き込むことで前記ヒヤリハット地図を作成する地図作成部とを備えている。
【0017】
本発明に係る地図作成システムの第2の態様は、前記判定部は、前記障害物判定候補領域内の前記物体の前記大きさの情報に基づいて、前記ヒヤリハット対象が、自動車、自動二輪車、自転車および人の何れであるかの分類を行うとともに、前記障害物判定候補領域内の前記物体の前記動きの情報および前記速度の情報に基づいて、前記自車両および前記物体の予測進路を取得し、前記自車両および前記物体のそれぞれの前記予測進路の交差角度と前記ヒヤリハット対象の分類結果とに基づいて、前記ヒヤリハット事象を分類する。
【0018】
本発明に係る地図作成システムの第3の態様は、前記判定部は、前記自車両および前記物体のそれぞれの前記予測進路の前記交差角度が60゜以上90゜未満である場合に、前記ヒヤリハット対象が前記自動車であれば、出会い頭によるヒヤリハット事象と分類し、前記ヒヤリハット対象が前記自動二輪車、前記自転車および前記人の何れかである場合は飛び出しによるヒヤリハット事象と分類し、前記交差角度が20゜以上600゜未満である場合に、前記ヒヤリハット対象が前記自動車、前記自動二輪車および前記自転車の何れかである場合は割り込みによるヒヤリハット事象と分類し、前記交差角度が20゜未満である場合に、前記ヒヤリハット対象が前記自動車、前記自動二輪車および前記自転車の何れかである場合は追突によるヒヤリハット事象と分類する。
【発明の効果】
【0019】
本発明に係る運転記録装置の第1の態様によれば、記録部には、衝突可能性判定部で、自車両が物体と衝突する可能性があると判定された場合に、その時点の前後の画像データが記録されているので、記録部の情報に基づいてヒヤリハット事例を解析することができる。
【0020】
本発明に係る運転記録装置の第2の態様によれば、記録部には、衝突可能性判定部で、自車両が物体と衝突する可能性があると判定された時点での自車両の位置情報が記録されているので、ヒヤリハット事例の発生位置を特定することができる。
【0021】
本発明に係る運転記録装置の第3の態様によれば、記録部には、物体の大きさの情報、動きの情報および速度情報も記録されているので、これらの情報を用いてヒヤリハット事例を自動的に解析することができる。
【0022】
本発明に係る運転記録装置の第4の態様によれば、2次元オプティカルフローは、画像中の注目点がどの方向にどれだけ移動しているかを表す速度ベクトルであるので、第1画像内の所定の領域における2次元オプティカルフローを用いることによって、障害物判定候補領域を抽出することができる。
【0023】
本発明に係る運転記録装置の第5の態様によれば、第1画像内の所定の領域に対し、過去の2次元オプティカルフローと現在の2次元オプティカルフローとを比較することによって、障害物判定候補領域を抽出することができる。
【0024】
本発明に係る運転記録装置の第6の態様によれば、道路面は、自車両と衝突の可能性のない物体であるので、障害物判定候補領域を漏れなく抽出することができる。
【0025】
本発明に係る運転記録装置の第7の態様によれば、衝突判定が3次元オプティカルフローによって行われるので、より正確に衝突判定を行うことができる。
【0026】
本発明に係る運転記録装置の第8の態様によれば、3次元オプティカルフローを含む線分と立体の境界面とが交差するか否かという比較的簡易な情報処理で、衝突判定を行うことができる。
【0027】
本発明に係る地図作成システムの第1の態様によれば、ヒヤリハット対象およびヒヤリハット事象が書き込まれたヒヤリハット地図を得ることができる。
【0028】
本発明に係る地図作成システムの第2の態様によれば、ヒヤリハット対象およびヒヤリハット事象の解析を自動的に行うことができる。
【0029】
本発明に係る地図作成システムの第3の態様によれば、比較的簡単な処理でヒヤリハット対象およびヒヤリハット事象の解析を行うことができる。
【図面の簡単な説明】
【0030】
【図1】一般的なヒヤリハット地図の一例を示す図である。
【図2】本発明に係る運転記録装置および地図作成システムの構成を示すブロック図である。
【図3】本発明に係る運転記録装置の動作を説明するフローチャートである。
【図4】時系列ステレオ画像における対応点探索について説明するための図である。
【図5】位相限定相関法により得られた結果を示す図である。
【図6】所定の基準面における2次元オプティカルフローを説明するための図である。
【図7】所定の基準面上に存在する物体における2次元オプティカルフローを説明するための図である。
【図8】領域分割を行って候補領域の抽出を実行する場合における領域分割の仕方を説明するための図である。
【図9】撮影カメラの位置と撮影条件との関係を説明するための図である。
【図10】視差の2乗とオプティカルフローの垂直成分との関係を示す図である。
【図11】視差の2乗とオプティカルフローの垂直成分との関係から得られる直線を示す図である。
【図12】3次元オプティカルフローの算出処理を説明するための図である。
【図13】第1の衝突可能性判定処理を説明するための図である。
【図14】第2の衝突可能性判定処理を説明するための図である。
【図15】画素ブロックに距離情報を振り当てた立体物マップを示す図である。
【図16】ヒヤリハット対象、事象判定部での解析例を示す図である。
【図17】ヒヤリハット対象、事象判定部での解析例を示す図である。
【図18】ヒヤリハット対象、事象判定部での解析例を示す図である。
【図19】ヒヤリハット対象、事象判定部での解析例を示す図である。
【図20】本発明に係る地図作成システムにより得られたヒヤリハット地図の一例を示す図である。
【図21】本発明に係る運転記録装置の変形例の構成を示すブロック図である。
【図22】本発明に係る運転記録装置の変形例の構成を示すブロック図である。
【発明を実施するための形態】
【0031】
<一般的なヒヤリハット地図の一例>
図1に、一般的なヒヤリハット地図の一例を示す。一般的なヒヤリハット地図は、車両の運行領域において過去にどこでヒヤリハット事例が生じたかを示しており、図1においては、出発地点SPと目的地点OPとの間における、車両のこれからの予想運行ルート(複数)を破線で重畳した図となっている。運転者に、このような地図を事前にチェックさせ、記憶させておくことで運転に際して注意を払うべき地点を認識させることができ、有効な安全運転教育ができる。
【0032】
ところが、図1の地図においては、ヒヤリハット事例の発生点は把握できても、どのような対象に対して、どのような配慮をした運転を行うのが良いかが判らない。
【0033】
一般的なドライブレコーダーにおいては、加速度情報などを用いてヒヤリハット事例の発生を判定し、ヒヤリハット事例が発生した場合には、GPSからの位置情報とともにヒヤリハット事例の画像を記録することが可能であるので、それらの情報を用いることで、図1のようなヒヤリハット地図を自動的に作成することができる。しかし、従来のドライブレコーダーからの情報では、発生したヒヤリハット事例の対象や事象を自動的に特定することは困難であり、人手による解析では手間がかかり過ぎ、地図への記録がなされていないというのが実状である。
【0034】
<実施の形態>
図2は、本発明に係る運転記録装置100および地図作成システム10の構成を示すブロック図である。
【0035】
<運転記録装置の構成>
図2に示すように、運転記録装置100は、車両に搭載されたステレオカメラSCで撮影されたステレオ画像から基準画像の画素ブロックごとに参照画像上の対応点探索を行い、視差を算出して得られる画素ブロックごとの3次元座標から、距離情報を含む3次元画像情報を取得するとともに、時系列の画像データから2次元オプティカルフローを算出する3次元計測部1と、3次元計測部1で得られた2次元オプティカルフローに基づいて、自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出する障害物検出部2と、障害物検出部2で検出された障害物判定候補領域に対して、距離情報に基づいて、自車両と障害物判定候補領域に写し出されている物体とが衝突するか否かを判定し、衝突までの時間が、回避可能時間に比較して余裕がない場合にはトリガ信号を発する衝突可能性判定部3と、衝突可能性判定部3がトリガ信号を発するタイミングで、3次元計測部1を介して与えられる、その時の画像データを記録する記録部4と、自車両の位置情報を取得し、記録部4での画像データが記録された時点での位置情報を記録部4に与える位置情報取得部5とを備えている。次に、各構成について説明する。
【0036】
<ステレオカメラ>
ステレオカメラSCは、車両等の自車両に搭載され、ステレオ時系列画像を取得するものである。ステレオカメラSCは、例えばCCD(Charge-Coupled Devices)等の撮像素子を有するカメラであり、適当な距離だけ離間させて左右に設置された2つのカメラを備えて構成される。ステレオカメラSCにおける左右それぞれのカメラは、被写体を同じタイミングで撮像し、左右一対の画像を得る。なお、左右のカメラの収差は良好に補正されており、かつ、これらは相互に平行に設置されていることが好ましい。このように、ステレオカメラにおいて、各カメラが平行に設置されることで、平行化された画像が得られ、これら画像から容易に3次元画像情報を得ることができる。なお、3次元画像情報とは、ステレオ時系列画像から得ることができる、カメラの位置を基準とした3次元座標、2次元および3次元動きベクトル等をいう。このステレオカメラSCは、一定周期で随時撮像を繰り返している。また、ステレオカメラSCが被写体を撮像し、生成するステレオ画像は、立体情報を含んでいる。
【0037】
なお、例えば、ステレオカメラの代わりに単眼カメラを用いる場合は、3次元情報の取のために、3次元計測ができる機器、例えば、レーザやミリ波による計測器を備える構成とし、この計測器により、立体情報を取得すれば良い。
【0038】
<3次元計測部>
3次元計測部1は、ステレオカメラで得られた画像の3次元画像情報を算出する。具体的には、3次元計測部1は、画像上における点の撮像位置を基準とする3次元座標および動きベクトル等を求める。時系列ステレオ画像をもとに、3次元画像情報(前記3次元座標および動きベクトル等)を得る方法は公知の方法を用いれば良い。
【0039】
具体的には、ステレオ画像における3次元画像情報は、ある画像上の点に対応する点を、その画像に対応する画像上から探索する(対応点探索)ことで得られる。例えば、一対のステレオ画像どうしにおいて、対応点探索を行うことで、その時刻における3次元座標が得られる。
【0040】
また、例えば、同一のカメラで撮像した、撮像時間の異なる被写体の画像どうしにおいて、対応点探索を行うことで、その点の動きベクトルが求められる。なお、ステレオカメラSCがステレオカメラでなく、単眼カメラである場合には、レーザやミリ波による3次元計測器等を備える。そして、3次元計測部1は、これらの測定器による計測値および、単眼カメラにより被写体が撮像されて生成された時系列画像を関連づけて、3次元画像情報を得る。例えば、この単眼カメラの光軸と同一方向に出射された、レーザまたはミリ波による3次元計測により求められた立体情報を、単眼カメラにより撮像された被写体の画像と関連づければ良い。
【0041】
対応点探索法として、基準画像上の任意の注目点に対応する参照画像上の点(対応点)を探索して求める相関法がある。なお、参照画像は、基準画像に対応する画像である。 具体的には、ステレオ画像においては、同時刻に撮像した一対の画像のうち一方が基準画像であり、他方は参照画像である。また、時系列画像においては、同一のカメラで撮影された画像のうち、時間的に前の画像が基準画像であり、時間的に後の画像が参照画像である。この基準画像上の注目点に対してテンプレートが設定され、このテンプレートと対応する参照画像上のウィンドウが探索され、この探索されたウィンドウから対応点が求められる。
【0042】
以下に、3次元計測部1により行われる、具体的な対応点探索について説明する。ステレオカメラSCにより生成されたステレオ画像の一方は基準画像とされ、その基準画像に注目点が設定され、基準画像上に注目点を含むテンプレートが設定される。ここで、テンプレートとは基準画像において一定の領域で区切られた範囲であって、その範囲内における各画素の輝度値等の情報(画像パターン)を有している。そして、このテンプレートと、当該基準画像と対応する参照画像(前記ステレオ画像における他方の画像)において複数設定されたウィンドウとの相関値(類似度)が算出され、相関値に基づいて、これらテンプレートとウィンドウとが対応しているか否かが判断される。
【0043】
なお、ウィンドウとは参照画像において複数生成された、テンプレートと同一の大きさの範囲の領域であって、その範囲内における各画素の輝度値等の情報(画像パターン)を有している。上述のように、テンプレートとウィンドウとの画像パターンから相関値が求められる。例えば、テンプレートと何れかのウィンドウとの相関値が求められ、仮に、これらの相関値が低いことから、これらが対応しないと判断されれば、例えば1画素何れかの方向にずれた位置に生成されたウィンドウとテンプレートとの相関値が求められる。このようにして、順次ウィンドウが変更されながら相関値が求められ、相関値がピークの値をとるウィンドウが探索される。そして、テンプレートの画像パターンと相関値がピークである画像パターンを有するウィンドウが、テンプレートに対応するウィンドウであると求められる。
【0044】
次に、相関値の具体的な算出方法について説明する。具体的には、関数を用いて相関値を求める。その方法としては、例えば、SAD(Sum of Absolute Difference)法、SSD(Sum of Squared Difference)法(2乗残差法)、NCC(Normalize cross Correlation)法(正規化相互相関法)等が知られている。
【0045】
SAD法は、テンプレートおよびウィンドウの輝度値の絶対値による総和を求める関数を用いる方法であって、この関数を用いてテンプレートおよびウィンドウごとの相関値が求められる。また、上記SAD法等に比べてロバスト性を有する相関値演算の方法もある。具体的には、この方法は、画像パターンの周波数分解信号から、振幅成分を抑制した位相成分のみの信号を用いて類似度演算を行う方法である。そして、この方法を用いることで、ステレオ画像における左右カメラの撮影条件の差や、ノイズなどの影響を受けにくく、ロバスト性を有する相関値演算が実現可能である。
【0046】
なお、画像パターンの周波数分解信号を計算する手法は、例えば高速フーリエ変換(FFT)、離散フーリエ変換(DFT)、離散コサイン変換(DCT)、離散サイン変換(DST)、ウエーブレット変換、アダマール変換などが知られている。ここでは、このようなロバスト性を有する相関値演算のうち位相限定相関法(以下、POC法という)について簡単に説明する。
【0047】
POC法においても、基準画像上にテンプレートが設定され、参照画像上に同じ大きさを持つウィンドウが設定される。そして、テンプレートと各ウィンドウとの相関値(POC値)が計算され、その相関値からテンプレートに対応するウィンドウが求められる。まず、基準画像のテンプレートおよび参照画像のウィンドウは、それぞれ2次元離散フーリエ変換され、規格化された後、合成され、2次元逆離散フーリエ変換される。このようにして、相関値であるPOC値が求められる。また、POC値はウィンドウ内における画素ごとに離散的に求まるため、画素ごとの相関値を求めることができる。この点が、ウィンドウごとの相関値を求める、上述のSAD法等とは異なる。このように、POC法においては、ウィンドウ内における画素ごとに相関値を求めることができるので、ウィンドウの設定範囲を絞り込むことが容易であり、対応点を求める処理が高速でできるという効果を奏する。また、上記POC法等のロバスト性を有する相関値演算方法においては、ウィンドウ内における画素ごとに相関値を求めることができるため、SAD法等のようにウィンドウを1画素ずつずらして相関値を求めなくても、対応するウィンドウを探索することができる。
【0048】
POC法においては、テンプレートとの相関値を求める際に、ウィンドウを複数画素分ずらしながら、相関値の算出を行っても良い。具体的に、どれだけずらすことができるかは、対応点の探索可能範囲に依存するが、一般的には、ウィンドウサイズの半分くらいであるといわれている。つまり、例えば、ずらされたウィンドウと、ずらされる前のウィンドウとが、ウィンドウサイズの半分程度において重なるように設定されれば良い。例えば、基準画像と参照画像との視差の最大を128画素とし、ウィンドウサイズを31×31とし、POC法により探索できる範囲をウィンドウの重心位置に対して±8画素と仮定すると、この視差を探索するためには、ウィンドウは16画素ずつずらされれば良いので、8個のウィンドウが設定されれば良い。
【0049】
3次元計測部1では、時系列画像における所定の第1時刻tに取得された第1画像、および、前記時系列画像における所定の第1時刻tと異なる第2時刻t+△tに取得された第2画像に対して、上述した対応点探索により対応点を求め、対応点どうしの差によって2次元オプティカルフローを算出する。
【0050】
<障害物検出部>
障害物検出部2では、3次元計測部1で求めた2次元オプティカルフローに基づいて、自車両と衝突する可能性のある第1画像内の点または領域を障害物判定候補領域(候補領域)として抽出するものである。より具体的には、例えば、第1画像内の所定の領域に対し、予め設定された所定値と現在の2次元オプティカルフローとの差を求め、この求めた差が予め設定された所定の第1閾値以上である場合に、第1画像内の所定の領域を候補領域として抽出する。そして、この予め設定された所定値は、例えば、過去の2次元オプティカルフローを用いても良いし、時系列画像の何れか1つの画像に写し出された道路面の2次元オプティカルフローであっても良い。そして、この道路面の2次元オプティカルフローは、ステレオカメラSCの設置条件に基づいて求められたものであっても良い。
【0051】
また、障害物検出部2では、抽出された候補領域に対し、自車両と候補領域に写し出されている物体までの距離を取得する。本実施形態では、撮影にステレオカメラSCを用いることから、距離情報は、このステレオカメラSCによって取得された1組のステレオ画像に基づいて、抽出された候補領域におけるステレオ画像間の対応点を対応点探索処理によって抽出することで、自車両と候補領域に写し出されている物体までの距離情報を取得する。
【0052】
<衝突可能性判定部>
衝突可能性判定部3では、障害物検出部2で抽出された候補領域に対し、障害物検出部2で取得した距離情報に基づいて、自車両と候補領域に写し出されている物体とが衝突するか否かを判定する。
【0053】
例えば、障害物検出部2で抽出された候補領域に対し、2次元オプティカルフローおよび距離情報に基づいて、3次元オプティカルフローを求め、抽出された候補領域に対して3次元オプティカルフローに基づいて、自車両と候補領域に写し出されている物体とが衝突するか否かを判定する。
【0054】
この判定は、例えば、自車両を含む立体を仮想した場合に、3次元オプティカルフローを含む線分と立体の境界面とが交差するか否かを判定することによって、自車両と候補領域に写し出されている物体とが衝突するか否かを判定する。
【0055】
そして、衝突すると判定した場合は、物体までの距離と、自車両の速度に基づいて算出した衝突までの時間が、回避可能時間に比較して余裕がない場合には、ヒヤリハット事例が発生したとしてトリガ信号を記録部4に向けて出力する。
【0056】
<記録部>
記録部4では、衝突可能性判定部3からトリガ信号が与えられた場合、当該トリガ信号が与えられる前後に相当する時間Δtf前から、時間Δta後の画像データと、トリガ信号が与えられた時点での位置情報を位置情報取得部5から取得して記録する。なお、画像データは、ステレオカメラで得られた画像データが3次元計測部1を介して与えられるものであり、常時、記録部4に与えられ所定時間だけ記録され、所定時間経過後は上書きされるものである。従って、この所定時間を、Δtfに設定しておけば、トリガ信号が与えられた時点よりΔtf前の画像データは記録部4に残っており、それをΔtf前の画像データとして使用することができる。
【0057】
ここで、位置情報取得部5はGPSの情報を受ける受信部であり、トリガ信号が与えられるタイミングでGPSから受信した位置情報を、ヒヤリハット事例が発生した地点の位置情報として記録部4に与える。
【0058】
また、記録部4には、衝突可能性判定部3で得られた、衝突の可能性のある物体の大きさ、および物体の移動方向、移動速度などの情報も記録される。
【0059】
<運転記録装置の動作>
次に、運転記録装置100の動作について、図3に示すフローチャートを用いて説明する。
【0060】
運転記録装置100の動作が開始されると、ステレオカメラSCの2つのカメラがタイミングを合わせて(同期して)所定の時間間隔で撮影を行い、それぞれのカメラで撮影された時系列画像(時系列画像データ)が3次元計測部1に与えられる。
【0061】
3次元計測部1では、ステレオカメラSCによって取得された時間的に異なる2つの時系列画像データI(t)、I(t+△t)において対応点探索処理を行って、対応点を探索し、対応点どうしの差を求めることによって、2次元オプティカルフローOFxy(t+△t)を算出し、この算出した2次元オプティカルフローOFxy(t+△t)を障害物検出部2および衝突可能性判定部3にそれぞれ出力する(ステップS1)。
【0062】
ここで、時系列画像データI(t)、I(t+△t)は、ステレオカメラSCの2つのカメラのどちらで撮影された時系列画像の何れであっても良い。以下では、一方のカメラで撮影された時系列画像I1(t)、I1(t+△t)を用いるものとする。なお、添え字の「1」は一方のカメラで撮影されたことを表し、他方のカメラで撮影された場合は添え字として「2」を用いる。
【0063】
続いて、障害物検出部2において、3次元計測部1によって算出された2次元オプティカルフローOFxy(t+△t)に基づいて、衝突可能性判定部3によって衝突の可能性の有無を判定すべき点または領域を衝突可能性判定候補領域(候補領域)DAob(t+△t)として抽出し、この抽出した候補領域DAob(t+△t)を衝突可能性判定部3に出力する(ステップS2)。
【0064】
また、障害物検出部2では、距離情報を取得するステップS3において、抽出した候補領域DAob(t+△t)に対し、ステレオカメラSC(すなわち、自車両)から候補領域DAob(t+△t)に撮像されている物体までの距離を距離情報D(t)として時刻tについて取得し(ステップS31)、また、時刻t+△tについて距離情報D(t+△t)取得し(ステップS32)、これらの距離情報D(t)およびD(t+△t)を衝突可能性判定部3に出力する。
【0065】
次に、衝突可能性判定部3は、障害物検出部2によって抽出された候補領域DAob(t+△t)に対し、3次元計測部1で算出された2次元オプティカルフローOFxy(t+△t)および障害物検出部2によって取得された距離情報D(t)、D(t+△t)に基づいて、3次元オプティカルフローOFxyz(t+△t)を算出する(ステップS4)。
【0066】
その後、衝突可能性判定部3では、候補領域DAob(t+△t)に対し、この算出した3次元オプティカルフローOFxyz(t+△t)に基づいて衝突の可能性があるか否かを判定する。
【0067】
そして、判定の結果、衝突の可能性があると判定された場合には、衝突可能性判定部3は、その旨とともに、衝突の可能性がある物体までの距離、その大きさおよび衝突までの時間等を記録部4に出力する。なお、これらの情報を車載の表示装置に表示し、併せてブザー等によって運転者に警告を与える構成としても良い。
【0068】
次に、図3に示した各ステップをより具体的に説明する。
【0069】
<ステップS1:2次元オプティカルフローの算出処理>
先に説明したように、3次元計測部1では、2つの時系列画像データにおいて対応点探索処理を行い、対応点どうしの差によって2次元オプティカルフローOFxy(t+△t)を算出するが、以下においては、この対応点探索処理に位相限定相関法(POC)を用いる場合について説明する。
【0070】
図4は、位相限定相関法を用いた対応点探索処理を説明するための図である。位相限定相関法を用いた対応点探索処理では、まず基準画像上のウィンドウ内の画像と、参照画像上のウィンドウ内の画像とが抽出される。これらの画像については、次の数式のように表されるものとする。
【0071】
【数1】
【0072】
ここで、上記の数式におけるf(n1,n2)およびg(n1,n2)は、基準画像上のウィンドウ内の画像および参照画像上のウィンドウ内の画像を示している。また、N1およびN2は、例えばN1=2M1+1、N2=2M2+1と設定されている。
【0073】
次に、基準画像および参照画像のウィンドウ内の各画像に対し、次の数式に示す演算式を用いた2次元のフーリエ変換処理T1a、T1bを行う。
【0074】
【数2】
【0075】
なお、上記の数式のただし書におけるWの添え字Pには、N1、N2が代入され、またkの添え字sには、1、2が代入される。
【0076】
このようなフーリエ変換処理T1a、T1bが施された各画像に対しては、次の数式に示す演算式を用いて、画像の振幅成分を除去するための規格化処理T2a、T2bが行われる。
【0077】
【数3】
【0078】
規格化処理T2a、T2bが完了すると、次の数式に示す演算式を用いた合成処理T3が行われる。
【0079】
【数4】
【0080】
合成処理T3とともに、次の数式に示す演算式を用いた2次元の逆フーリエ変換処理T4が行われる。これにより、各画像間の相関演算が実施されることとなり、その結果(POC値)が出力される。
【0081】
【数5】
【0082】
以上の位相限定相関法を用いた処理により、例えば図5に示すような結果が得られる。この図5においては、ウィンドウ(N1×N2)内で相関が高い箇所のPOC値が大きくなっており、POC値のピークJcに対応する参照画像上のウィンドウ内の位置が、基準画像上のウィンドウの中心点(指定点)に対応した参照画像上の対応点に相当することとなる。
【0083】
このような対応点探索によって求められた対応点に基づいて得られた2次元オプティカルフローは、輝度値が比較的急激に変化する部分でも誤差が少なく、ノイズにも強いという特徴がある。
【0084】
<ステップS2:衝突可能性判定候補領域の抽出処理)
図6は、所定の基準面における2次元オプティカルフローを説明する図である。図6の(a)部には、2次元オプティカルフローを示し、図6の(b)部には、基準面上の点Aおよび点Bについて、進行方向zにおける時刻tの位置を示し、図6の(c)部には、基準面上の点Aおよび点Bについて、進行方向zにおける時刻t+△tの位置を示す。
【0085】
図7は、所定の基準面上に存在する物体における2次元オプティカルフローを説明する図である。図7の(a)部には、2次元オプティカルフローを示し、図7の(b)部には、物体上の点A’および点B’について、進行方向zにおける時刻tの位置を示し、図7(c)部には、物体上の点A’および点B’について、進行方向zにおける時刻t+△tの位置を示す。
【0086】
図8は、領域分割を行って候補領域の抽出を実行する場合における領域分割の仕方を説明する図である。図8の(a)部には、等面積で分割する場合における各領域を示し、図8の(b)部には、不等面積で分割する場合における各領域を示す。
【0087】
一般に、自車両が移動方向を変えずに移動した場合(例えば、直進移動した場合)、静止物体の2次元オプティカルフローは、所定の消失点に向かうが、高さが異なる2点では、その向かう消失点が互いにずれる(異なる)。このため、例えば、図6の(a)部に示す点A、B、C、Dは、共通な所定の平面(例えば、道路面)上にある点であるため、それら各A、B、C、Dの点2次元オプティカルフローは、図6の(a)部に示すように、互いに共通な1つの消失点NP1に向かい、この消失点NP1から放射状に延びる。一方、所定の平面(この例では道路面)上に存在する物体上における所定の平面からある高さにある点、例えば、図7の(a)部に示す点A’および点C’は、高さが異なって、高さ方向Yの成分があり、これら点A’および点C’の各2次元オプティカルフローは、図7の(a)部に示すように、所定の平面上の点の2次元オプティカルフローにおける消失点NP1と異なる消失点(図示せず)に向かい、消失点NP1とは異なる。
【0088】
従って、障害物検出部2は、予め設定された所定の基準面における2次元オプティカルフローと基準面上に存在する物体における2次元オプティカルフローとが互いに異なることから、3次元計測部1で算出された2次元オプティカルフローOFxy(t+△t)に基づいて、候補領域DAob(t+△t)を抽出することができる。
【0089】
より具体的には、所定の基準面として道路面が用いられ、微小時間△tの間において自車両の速度がほぼ変化しないと仮定した場合、図6の(b)部および図6の(c)部に示すように、基準面(道路面)上の点の2次元オプティカルフローは、同じ移動量を持つとして算出されるが(OFxy(t+△t)−OFxy(t)=0)、基準面(道路面)上にない物体上の点の2次元オプティカルフローは、図7の(b)部および図7の(c)部に示すように、同じ移動量を持つものとしては算出されない(OFxy(t+△t)−OFxy(t)≠0)。
【0090】
このため、障害物検出部2は、予め設定された所定の画素に対し、時刻t−△tの画像データと時刻tの画像データから2次元オプティカルフローOFxy(t)を求めると共に、時刻tの画像データと時刻t+△tの画像データから2次元オプティカルフローOFxy(t+△t)を求め、これら2次元オプティカルフローの差(OFxy(t+△t)−OFxy(t))を求め、この結果の絶対値が予め設定された所定の閾値Th1以下であるか否かを判定することによって、候補領域DAob(t+△t)を抽出することができる。結果の絶対値が所定の閾値Th1以下である場合には、その画素は、候補領域DAob(t+△t)内の画素ではないと判定され、前記結果の絶対値が所定の閾値Th1を超える場合には、その画素は、候補領域DAob(t+△t)内の画素であると判定される。
【0091】
すなわち、障害物検出部2は、第1画像内の所定の領域に対し、過去の2次元オプティカルフローと現在の2次元オプティカルフローとの差を求め、この求めた差の絶対値が所定の閾値Th1以上であるか否かを判定することによって、候補領域DAob(t+△t)を抽出することができる。
【0092】
ここで、所定の閾値Th1は、画像上の領域ごとに変更しても良い。画像の上部領域は、自車両から比較的遠い位置にある物体の画像であり、画像の下部領域は、自車両から比較的近い位置にある物体の画像である。このため、所定の閾値Th1は、画像の下部領域から上部領域に行くに従って小さくなっても良い。このように所定の閾値Th1を変更することによって、計測誤差に強く、ロバスト性が向上する。
【0093】
また、障害物検出部2によって候補領域DAob(t+△t)内の画素であるか否かが判定される所定の画素は、画像データの全画素(計測点)であっても良く、また、図8に示すように、画像データを複数の画素を持った領域に分割し、各領域内の各画素(局所領域の計測点)であっても良い。すなわち、所定の画素は、所定の間隔で間引かれた画素であっても良い。図8には、各領域が矩形である場合が示されている。
【0094】
そして、この領域は、図8の(a)部に示すように、互いに等面積であっても良いが、図8の(b)部に示すように、互いに異なる面積であっても良い。この場合において、各分割領域(局所領域)の面積は、画像の下部領域から上部領域に行くに従って狭くなっても良い。このように分割領域(局所領域)の面積を変更することによって、計測誤差に強く、ロバスト性が向上する。
【0095】
なお、この判定手法によれば、判定対象の画素が、自車両の進行方向と同じ方向に進行しており等速運動している物体上の画素である場合や、遠距離に存在しており消失点付近に存在している画素である場合は、OFxy(t+△t)=0、OFxy(t)=0となることから、衝突可能性判定候補領域DAob(t+△t)として抽出されないが、この画素は、衝突の可能性のない物体を捉えた画素であるため、衝突可能性判定候補領域DAob(t+△t)として抽出されなくても問題とならない。
【0096】
また、道路面の2次元オプティカルフローは、実際に道路面を予め計測しておきデータとして保持しておいても良いが、例えば、次のように撮影カメラ2の設置条件から求めることもできる。
【0097】
図9は、撮影カメラの位置と撮影条件との関係を説明するための図である。図9に示すように、焦点距離fで画角θであるカメラが、路面から高さhの位置に、前進方向Zに対しピッチ方向の傾きφで自車両に取り付けられ、パン方向およびロール方向の傾きが実質的に0であるとする。このような場合では、画像上の座標yと道路面までの距離Dとの関係は、下記の数式のように表される。
【0098】
【数6】
【0099】
従って、2次元オプティカルフローの垂直成分△yは、下記の数式のように表され、そして、2次元オプティカルフローの水平成分△xは、下記の数式のように表される。
【0100】
【数7】
【0101】
【数8】
【0102】
ここで、vは、自車両の速度であり、△tは、2つの画像間の撮影時間間隔(フレーム周期)であり、yは、カメラからZ方向に離れた路面上の点Aを表す画像上の点の垂直成分であり、xは、カメラからZ方向に離れた路面上の点Aを表す画像上の点の水平成分であり、αは、画素ピッチをpとし画素数をNとすると、α=f/p=N/(2θ)である。
【0103】
なお、速度vは、以下の工程(a-1)〜(a-5)が順次に実行されることで算出することができる。
【0104】
(a-1)フレーム周期分の時間差を有して撮影されるステレオ画像から各注目点に係る視差dの2乗とオプティカルフローの垂直成分Δyとが求められる。
【0105】
(a-2)視差dの2乗とオプティカルフローの垂直成分Δyとを座標軸とする2次元座標空間に各注目点に係る数値がプロットされる。図10は、各注目点に係る視差dの2乗とオプティカルフローの垂直成分Δyとの関係を示す図である。図10では、横軸が視差dの2乗を示し、縦軸がオプティカルフローの垂直成分Δyを示す2次元座標空間に各注目点に係る数値がプロットされた状態が示されている。
【0106】
(a-3)最小二乗法、ハフ変換等の直線算出手法が用いられて、図10で示されるようにプロットされた各点によって描かれる直線L1が検出される。
【0107】
(a-4)直線L1の傾きおよび切片が検出される。
【0108】
(a-5)上記工程(a-4)において検出された直線L1の傾きから自車両の走行速度(前進速度)vが算出されるとともに、上記工程(a-4)において検出された直線L1の切片から自車両のピッチ方向における角速度ωが算出される。ここで、直線L1は、図11で示されるように、Δyおよびd2を変数とし、(1/α)・(v・Δt/1)・(h/B2)を傾きとし、−α・ω・Δtを切片とする直線である。なお、カメラパラメータα、基線長B、およびフレーム周期Δtは、ステレオカメラSCの設計によって決まる定数である。従って、直線L1の傾きと切片とが検出されれば、定数α,B,Δtが用いられて、h・vの値と角速度ωの値とが算出される。そして、道路面を基準としたステレオカメラSCの高さhとして、予め設定された初期値が採用されれば、自車両の走行速度vが求められる。
【0109】
なお、上記のようにステレオ画像から速度を検出する方法以外に、車載の速度センサからの情報を用いても良い。
【0110】
<ステップS3:距離情報の算出処理>
障害物検出部2では、抽出された候補領域DAob(t+△t)に対し、自車両から候補領域DAob(t+△t)に撮像されている物体までの距離情報をステレオカメラによるステレオ画像によって取得する。
【0111】
すなわち、ステレオ画像から候補領域DAob(t+△t)およびこれに対応する時刻tの領域の対応点がそれぞれ対応点探索処理によって探索され、これら探索された対応点の視差から距離情報D(t+△t)および距離情報D(t)が求められる。ステレオカメラSCの2つのカメラの中央位置から物体までの距離と視差とは、三角測量の原理に基づいて一義的に対応付けられる。なお、対応点探索を行うに当たって、収差補正および平均化処理が実行されても良い。この平均化処理は、各カメラの光軸方向および光軸周りの回転角および視点の高さを揃えた画像に変換する処理である。
【0112】
<ステップS4:3次元オプティカルフローの算出処理)
衝突可能性判定部3は、障害物検出部2で抽出された衝突可能性判定候補領域DAob(t+△t)に対し、2次元オプティカルフローOFxy(t+△t)および距離情報D(t)、D(t+△t)に基づいて、3次元オプティカルフローOFxyz(t+△t)を算出する。
【0113】
2次元オプティカルフローは、画像中の注目点(所定の点)が2次元画像上でどの方向にどれだけ移動しているかを表す速度ベクトルであるが、3次元オプティカルフローは、画像に奥行き方向(自車両の進行方向)の成分を加えた実空間上での速度ベクトルである。
【0114】
図12は、3次元オプティカルフローの算出処理を説明する図である。障害物検出部2によって抽出された候補領域DAob(t+△t)内における所定の画素(計測点)に対し、以下の処理が実行され、3次元オプティカルフローOFxyz(t+△t)が算出される。
【0115】
図12に示すように、まず、時刻tにおける基準画像I1の点PBASE,t(x1(t)、y1(t))に対応する、時刻t+△tにおける基準画像I1の点PBASE,t+△t(x1(t+△t)、y1(t+△t))が求められ、時刻tにおける基準画像I1の点PBASE,t(x1(t)、y1(t))に対応する、時刻tにおける参照画像I2の点PREF,t(x2(t)、y2(t))が求められる。次に、時刻t+△tにおける基準画像I1の点PBASE,t+△t(x1(t+△t)、y1(t+△t))に対応する、時刻t+△tにおける参照画像I2の点PREF,t+△t(x2(t+△t)、y2(t+△t))が求められる。
【0116】
ここで、各対応点の探索において、ピクセルレベル(画素レベル)で対応点が存在しない場合がある。このような場合では、ピクセルレベルで対応点を含む画素が4点探索され、これら4点の画素の画素値と対応点の画素値との比率に応じてこれら4点の画素から対応点までの距離を決定する補間処理を行うことによって、対応点の位置がサブピクセルレベルで探索される。
【0117】
次に、時刻tにおける基準画像I1の点PBASE,t(x1(t)、y1(t))と、これに対応する、時刻tにおける参照画像I2の点PREF,t(x2(t)、y2(t))とから、3次元再構成によって、計測点に対する時刻tの実空間における位置(X(t)、Y(t)、Z(t))が求められ、時刻t+△tにおける基準画像I1の点PBASE,t+△t(x1(t+△t)、y1(t+△t))と、これに対応する、時刻t+△tにおける参照画像I2の点PREF,t+△t(x2(t+△t)、y2(t+△t))とから、3次元再構成によって、計測点に対する時刻t+△tの実空間におけるステレオカメラを基準とした3次元位置(X(t+△t)、Y(t+△t)、Z(t+△t))が求められる。
【0118】
この3次元再構成は、例えば、いわゆるピンホールカメラモデルが用いられ、3次元空間上と2次元画像上の対応する点を行列で結びつけるキャリブレーションにより各カメラにおける射影行列P1、P2を求め、注目点の左右画像上の座標から最小二乗法を用いて算出することができる。
【0119】
そして、これらの差(X(t)−X(t+△t)、Y(t)−Y(t+△t)、Z(t)−Z(t+△t))として、3次元オプティカルフローOFxyz(t+△t)が算出される。
【0120】
<ステップS5:衝突可能性の判定処理>
衝突可能性判定部3は、障害物検出部2で抽出された候補領域DAob(t+△t)に対し、算出した3次元オプティカルフローOFxyz(t+△t)に基づいて衝突の可能性があるか否かを判定する。
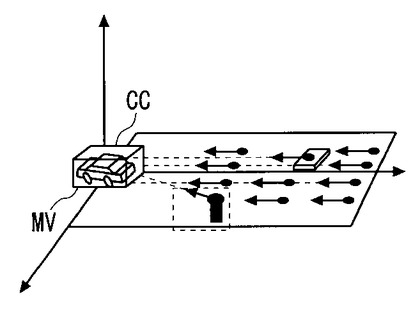
【0121】
図13は、第1の衝突可能性判定処理を説明する図である。図13において、自車両MVを含む立体、ここでは、移動体を囲む立方体CCが仮想され、まず、この立方体CCを構成する各平面(立体の境界面)に対し、3次元オプティカルフローOFxyz(t+△t)を含む線分が交差する交点PCROSS(X,Y,Z)がそれぞれ求められ、各平面の各交点に対し、所定の範囲に含まれる平面があるか否かが判定される。この判定の結果、所定の範囲に含まれる平面が1つでも存在する場合には、障害物検出部2で抽出された候補領域DAob(t+△t)は、衝突の可能性がある物体を撮影している領域であると判定される。
【0122】
ここで、所定の範囲は、ステレオカメラの位置、すなわち、自車両の位置を座標原点(0,0,0)として、X方向判定が−((W+αAREA1)/2)≦PCROSS(X)≦((W+αAREA)/2)であり、Y方向判定が−h+β1≦PCROSS(Y)≦(H−h)+αAREA2であり、そして、Z方向判定がF+αAREA3≦PCROSS(Z)≦B+αAREA3である。ここで、Wは、自車両の幅であり、αAREA1は、衝突をより確実に回避すべく自車両の幅Wに多少余裕を持たせた領域(危険判定領域)であり、Hは、自車両の高さであり、β1は、道路面からの車輪の高さであり、αAREA2は、衝突をより確実に回避すべく自車両の高さHに多少余裕を持たせた領域(危険判定領域)であり、hは、ステレオカメラの設置高さであり、Fは、カメラ設置位置を基準としてフロント側(前方側)における自車両の長さであり、Bは、カメラ設置位置を基準としてリア側(後方側)における自車両の長さであり、そして、αAREA3は、衝突をより確実に回避すべく自車両の長さF、Bに多少余裕を持たせた領域(危険判定領域)である。
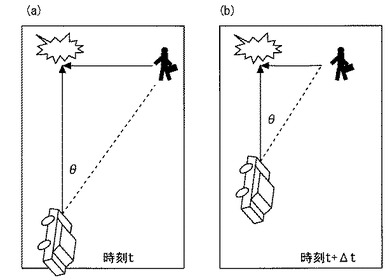
【0123】
図14は、第2の衝突可能性判定処理を説明するための図である。図14の(a)部には、時刻tにおける衝突の可能性のある領域を示し、図14の(b)部には、時刻t+△tにおける衝突の可能性のある領域を示す。衝突の可能性の或る領域は、自車両の速度および物体の速度が変化しない場合では、図14に示すように、自車両の進行方向と自車両から物体へ向かう方向、すなわち、物体の3次元オプティカルフローOFxyz(t+△t)とのなす角θは、一定であり、変化しない。このため、衝突可能性判定部3は、障害物検出部2によって抽出された候補領域DAob(t+△t)に対し、自車両の進行方向と物体の3次元オプティカルフローOFxyz(t+△t)とから角θを求め、この角θを各フレーム間で比較することで、衝突の可能性を判定しても良い。
【0124】
また、衝突可能性判定部3では、衝突の可能性がある物体の大きさも算出して、記録部に記録する。すなわち、障害物検出部2で抽出した候補領域について対応点探索処理によって探索された対応点の視差から距離情報が得られているので、当該距離情報に基づいて候補領域内の物体の大きさを算出することができる。
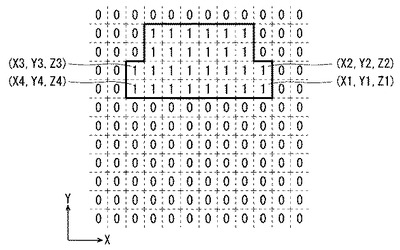
【0125】
図15は画像を例えば4×4画素で1画素ブロックとしてブロック化し、各画素ブロックに距離情報を振り当てた立体物マップである。
【0126】
図15においては、距離情報を0または1で表しており、1が与えられた領域が立体物の輪郭を示している。自車両が衝突する可能性を判定するには、立体物の高さ(Y方向の長さ)よりも幅(X方向の長さ)が重要となるので、候補領域内の物体の大きさとして、幅を算出する。
【0127】
例えば、図15において、高さ方向(Y方向)の位置が近い画素ブロックに着目し、(X1,Y1,Z1)の座標の画素ブロックと(X4,Y4,Z4)の座標の画素ブロックとの組と、(X2,Y2,Z2)の座標の画素ブロックと(X3,Y3,Z3)の座標の画素ブロックとの組との比較を行い、最大値を与える方を立体物の幅W(W=max(X3−X2,X4−X1))として算出する。
【0128】
また、最大のX座標から最小のX座標を差し引くことで立体物の幅W(W=max(X1,X2)−min(X3,X4))を算出しても良い。
【0129】
なお、上記は2次元座標を使用したが、3次元座標を使用して算出しても良い。
【0130】
このようにして算出された立体物の幅のデータを集め、類似する幅を有する立体物どうしでグループ化し、各グループがどのような幅の分布を有するかを分析することで、検出した立体物が何であるかを判定することができる。
【0131】
例えば、検出した立体物の幅が、ある立体物グループの幅の分布に含まれていれば、そのグループに含まれる立体物であると判定することができ、例えば、立体物が人間であるか、あるいは自動車であるかの判定を行うことができる。
【0132】
また、衝突可能性判定部3では、得られた3次元オプティカルフローに基づいて、衝突の可能性がある物体の実空間上での速度ベクトルから、当該物体の移動方向も算出し、動き情報として記録部4に記録する。なお、物体が静止している場合には、静止していることを動き情報として記録部4に記録する。
【0133】
<地図作成システムの構成>
次に、図2に示す地図作成システム10の構成について説明する。図2に示すように地図作成システム10は、データ読み出し部11、ヒヤリハット対象、事象判定部12、ヒヤリハット地図作成部13およびデータベース14を備えている。
【0134】
地図作成システム10は、例えば、タクシーやトラックの営業所等に配置された運行管理を行うコンピュータシステム内に構築される。また、各社の運行管理を行うコンピュータシステムや車載の運転記録装置100から無線通信によりデータを受け取り、各社のデータを一括処理する解析センターのような施設がある場合には、そこのサーバーコンピュータ内に構築しても良い。
【0135】
データ読み出し部11は、運転記録装置100の記録部4が着脱自在のメモリーカードなどの記録メディアである場合は、当該記録メディアを差し込むスロットを有し、当該記録メディアからのデータを読み出してヒヤリハット対象、事象判定部12に与える。
【0136】
ヒヤリハット対象、事象判定部12では、データ読み出し部11で読み出した、運転記録装置100の記録部4のデータに基づいて、どのような対象に対して、どのようなヒヤリハット事象が起きたかの解析を行う。
【0137】
ヒヤリハット地図作成部13では、ヒヤリハット対象、事象判定部12での解析結果に基づいて、ヒヤリハット事例の対象および事象を、データ読み出し部11で運転記録装置100から読み出した位置情報に基づいて地図上に記号等を用いて書き込む。
【0138】
データベース14は、各ドライバーが日々に経験したヒヤリハット事例について、ヒヤリハット対象、事象判定部12で解析した結果を記録し、管理するシステムであり、コンピュータ内の記憶装置が利用される。
【0139】
<解析動作>
次に、ヒヤリハット対象、事象判定部12での解析例について図16〜図19を用いて説明する。
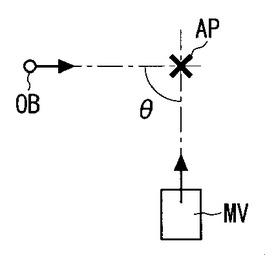
【0140】
図16〜図19には、自車両MVと対象物OBとが示され、自車両MVおよび対象物OBの速度を実線の矢印で示し、矢印の延長線として破線で予測進路を示している。そして、自車両MVおよび対象物OBの予測進路上で、速度を考慮した所定時間内に衝突する可能性がある地点を衝突推定地点APとして示している。なお、時間が所定時間を越える場合には、回避動作を取る余地があるものとして、ヒヤリハット事例にはならない。
【0141】
図16は、対象物OBが自車両MVの予測進路にほぼ直交する方向から進入してきた事例を示しており、互いの予測進路のなす角度θは60゜以上90゜未満である。これは、対象物OBが自動車である場合は「出会い頭によるヒヤリハット事象」と解析し、対象物OBが自転車、自動二輪車、人である場合は「飛び出しによるヒヤリハット事象」と解析する。
【0142】
図17は、対象物OBが自車両MVの予測進路に対して20゜以上60゜未満の角度で進入してきた事例を示しており、これは、対象物OBが自動車、自転車、自動二輪車等の車両である場合は「割り込みによるヒヤリハット事象」と解析する。
【0143】
図18は、対象物OBが自車両MVの予測進路に対して平行に近い20゜未満の角度で進入してきた事例を示しており、これは、対象物OBが自動車、自転車、自動二輪車等の車両である場合は「追突によるヒヤリハット事象」と解析する。なお、対象物OBが停止状態で動きベクトルを持たない場合も、これに属するものと解析する。
【0144】
また、運転記録装置100の記録部4には、ヒヤリハット事例発生時の前後の所定時間に渡る自車両の動きベクトルも記録されている。この時系列の動きベクトルの変化をチェックすれば、自車両が直進中か、左折中か、あるいは右折中の事象であるかも判別できる。例えば、図19は、対象物OBと自車両MVの進行方向が真反対であり、互いの予測進路のなす角度θが180゜に近い角度をなす事例を示しており、これは、対象物OBが自動車、自転車、自動二輪車である場合は、自車両MVが「右折中の場合の対向車とのヒヤリハット事象」と解析する。
【0145】
ヒヤリハット対象、事象判定部12での解析結果は、ヒヤリハット地図作成部13に与えられて、ヒヤリハット事例が発生した地点の位置情報に基づいて地図上に書き込まれる。
【0146】
図20に、ヒヤリハット事例の対象および事象を記録したヒヤリハット地図の一例を示す。
【0147】
図20においては、車両の運行領域において過去にどのようなヒヤリハット事例が生じたかを、発生地点のマークを変えることで示している。すなわち、歩行者の飛び出しによるヒヤリハット事象については×印で発生地点を示し、車両との追突によるヒヤリハット事象については▲(塗りつぶし三角)印で発生地点を示し、車両の割り込みによるヒヤリハット事象については■(塗りつぶし四角)印で発生地点を示すことで、ヒヤリハットの注意ポイントを一目瞭然に示している。
【0148】
なお、図20においては、出発地点SPと目的地点OPとの間における、車両のこれからの予想運行ルート(複数)を破線で重畳しており、運転者は、この地図から複数の予想運行ルートのうち、ヒヤリハット事例の少ないルートを選ぶことができ、また、この地図を事前にチェックすることで、注意を払うべき地点を認識することができる。
【0149】
データベース14では、このような地図を蓄積し、また、日々更新することで、運転者の安全運転教育をより有効なものとすることができる。
【0150】
<変形例1>
以上説明した実施の形態に係る運転記録装置100は、障害物の検出や将来の接触の可能性を判定し、障害物との相対速度や、障害物の大きさの情報とともに記録することを主眼とする構成であり、発生したヒヤリハット事例の対象や事象の解析は地図作成システム10で行うものとして説明した。
【0151】
しかし、発生したヒヤリハット事例の対象や事象の解析も運転記録装置で行う構成とし、地図作成システムでは運転記録装置での解析結果を受けてヒヤリハット地図を作成するだけの構成としても良い。図21にはその一例として、運転記録装置100Aを示す。
【0152】
なお、図21において、図2に示した運転記録装置100と同一の構成については同一の符号を付し、重複する説明は省略する。
【0153】
図21に示す運転記録装置100Aにおいては、記録部4に記録された、障害物との接触の可能性や、障害物との相対速度や、障害物の大きさの情報がヒヤリハット対象、事象判定部6に与えられる構成となっており、ヒヤリハット対象、事象判定部6での解析結果および、記録部4に記録された位置情報が地図作成システム10Aに与えられる構成となっている。なお、ヒヤリハット対象、事象判定部6の機能は、図2に示したヒヤリハット対象、事象判定部6の機能と同じである。
【0154】
図21に示すように地図作成システム10Aは、データ読み出し部21、ヒヤリハット地図作成部22およびデータベース23を備えている。
【0155】
データ読み出し部21は、ヒヤリハット対象、事象判定部6の出力を受ける入力インタフェースを有し、データ読み出し部21を介して得られたヒヤリハット対象、事象判定部6での解析結果および位置情報に基づいて、ヒヤリハット地図作成部22でヒヤリハット地図の作成を行う。なお、ヒヤリハット地図作成部22の機能は、図2に示したヒヤリハット地図作成部13の機能と同じである。
【0156】
<変形例2>
以上説明した実施の形態に係る運転記録装置100は、障害物の検出や将来の接触の可能性を判定し、障害物との相対速度や、障害物の大きさの情報とともに記録することを主眼とする構成として説明したが、障害物の検出や将来の接触の可能性の判定は、地図作成システムで行う構成としても良い。図22にはその一例として、運転記録装置100Bを示す。
【0157】
なお、図22において、図2に示した運転記録装置100と同一の構成については同一の符号を付し、重複する説明は省略する。
【0158】
図22に示す運転記録装置100Bにおいては、3次元計測部1、記録部4および位置情報取得部5を備え、3次元計測部1で得られた2次元オプティカルフローや、3次元画像情報は、位置情報とともに記録部4に記録されるだけの構成となっている。
【0159】
一方、地図作成システム10Bにおいては、データ読み出し部31、障害物検出部32、衝突可能性判定部33、ヒヤリハット対象、事象判定部34、ヒヤリハット地図作成部35およびデータベース36を備えている。
【0160】
データ読み出し部31では、運転記録装置100Bの記録部4に記録された、2次元オプティカルフローや、3次元画像情報を読み出し、障害物検出部32において自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出し、衝突可能性判定部33では、障害物検出部32で検出された障害物判定候補領域に対して、自車両との相対速度を算出し、相対速度および立体物の大きさに基づいて、接触の可能性を判定し、接触までの時間が、回避可能時間に比較して余裕がない場合にはトリガ信号を発し、トリガ信号を発するタイミングで、3次元計測部1を介して与えられ記録部4に記録された画像データと、位置情報取得部5で取得され記録部4に記録された位置情報とに基づいて、ヒヤリハット対象、事象判定部34で、ヒヤリハット事例の対象および事象の解析を行う構成となっている。なお、ヒヤリハット対象、事象判定部34の機能は、図2に示したヒヤリハット対象、事象判定部6の機能と同じである。
【0161】
そして、ヒヤリハット対象、事象判定部34での解析結果および位置情報に基づいて、ヒヤリハット地図作成部35でヒヤリハット地図の作成を行う。なお、ヒヤリハット地図作成部35の機能およびデータベース36の機能は、図2に示したヒヤリハット地図作成部13およびデータベース14の機能と同じである。
【0162】
このように、障害物検出や接触の可能性の判定を地図作成システム10Bで行うので、車載装置である運転記録装置100Bに要求される機能を低減でき、車載装置のコストを低減することができる。
【0163】
<応用例>
本発明に係る運転記録装置および地図作成システムでは、ヒヤリハット事例の対象および事象の解析を自動的に行い、位置情報と対応させることでヒヤリハット地図を作成するものとして説明したが、位置情報と組み合わせるのではなく、ヒヤリハット事例の解析結果を、運転者個人の運転傾向解析に使用することも可能である。
【0164】
すなわち、本願装置を使用することで、各運転者が、どのようなヒヤリハット事例に遭遇したかを統計的に解析することができ、例えば、割り込み事象に対して注意が不足しているという統計結果となった運転者には、運行管理者が注意を促すなどの、教育的配慮を行うことができ、有効な安全運転教育を行うことができる。
【符号の説明】
【0165】
1 3次元計測部
2 障害物検出部
3 衝突可能性判定部
4 記録部
5 位置情報取得部
11 データ読み出し部
12 ヒヤリハット対象、事象判定部
13 ヒヤリハット地図作成部
14 データベース
SC ステレオカメラ
【特許請求の範囲】
【請求項1】
車両に搭載されたステレオカメラで撮影された画像データから3次元画像情報を取得する3次元計測部と、
前記3次元計測部で算出された3次元画像情報に基づいて、自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出する障害物検出部と、
前記障害物検出部で検出された前記障害物判定候補領域に対して、距離情報に基づいて、自車両と障害物判定候補領域内の物体とが衝突する可能性があるか否かを判定する衝突可能性判定部と、
前記衝突可能性判定部で、前記自車両が前記物体と衝突する可能性があると判定された場合に、その時点の前後の前記画像データを少なくとも記録する記録部とを備える、運転記録装置。
【請求項2】
前記記録部には、
前記衝突可能性判定部で、前記自車両が前記物体と衝突する可能性があると判定された時点での前記自車両の位置情報が記録される、請求項1記載の運転記録装置。
【請求項3】
前記記録部には、前記物体の大きさの情報、動きの情報および速度情報がさらに記録される、請求項2記載の運転記録装置。
【請求項4】
前記障害物検出部は、第1画像内の所定の領域に対し、予め設定された所定値と現在の2次元オプティカルフローとの差を求め、この求めた差が所定の第1閾値以上である場合に、前記第1画像内の前記所定の領域を障害物判定候補領域として抽出する、請求項1記載の運転記録装置。
【請求項5】
前記障害物検出部における前記予め設定された所定値は、過去の2次元オプティカルフローである、請求項4記載の運転記録装置。
【請求項6】
前記障害物検出部における前記予め設定された所定値は、前記画像データに写し出された道路面の2次元オプティカルフローである、請求項4記載の運転記録装置。
【請求項7】
前記衝突可能性判定部は、
前記障害物検出部で抽出された前記障害物判定候補領域に対し、前記2次元オプティカルフローおよび前記3次元画像情報に含まれる距離情報に基づいて、3次元オプティカルフローを求め、前記障害物判定候補領域に対し、前記3次元オプティカルフローに基づいて、前記自車両と前記物体との衝突の可能性を判定する、請求項6記載の運転記録装置。
【請求項8】
前記衝突可能性判定部は、
前記自車両を含む立体を仮想した場合に、前記3次元オプティカルフローを含む線分と前記立体の境界面とが交差するか否かを判定することによって、前記自車両と前記物体とが衝突するか否かを判定する、請求項7記載の運転記録装置。
【請求項9】
請求項3記載の運転記録装置の前記記録部に記録された情報を取り込み、ヒヤリハット事例を解析してヒヤリハット地図を作成する地図作成システムであって、
前記記録部に記録された前記情報に基づいてヒヤリハット事例を解析し、ヒヤリハット対象およびヒヤリハット事象を分類する判定部と、
前記判定部で分類した前記ヒヤリハット対象および前記ヒヤリハット事象を、前記自車両の前記位置情報に基づいて地図上に書き込むことで前記ヒヤリハット地図を作成する地図作成部とを備える、地図作成システム。
【請求項10】
前記判定部は、
前記障害物判定候補領域内の前記物体の前記大きさの情報に基づいて、前記ヒヤリハット対象が、自動車、自動二輪車、自転車および人の何れであるかの分類を行うとともに、
前記障害物判定候補領域内の前記物体の前記動きの情報および前記速度の情報に基づいて、前記自車両および前記物体の予測進路を取得し、前記自車両および前記物体のそれぞれの前記予測進路の交差角度と前記ヒヤリハット対象の分類結果とに基づいて、前記ヒヤリハット事象を分類する、請求項9記載の地図作成システム。
【請求項11】
前記判定部は、
前記自車両および前記物体のそれぞれの前記予測進路の前記交差角度が60゜以上90゜未満である場合に、前記ヒヤリハット対象が前記自動車であれば、出会い頭によるヒヤリハット事象と分類し、前記ヒヤリハット対象が前記自動二輪車、前記自転車および前記人の何れかである場合は飛び出しによるヒヤリハット事象と分類し、
前記交差角度が20゜以上600゜未満である場合に、前記ヒヤリハット対象が前記自動車、前記自動二輪車および前記自転車の何れかである場合は割り込みによるヒヤリハット事象と分類し、
前記交差角度が20゜未満である場合に、前記ヒヤリハット対象が前記自動車、前記自動二輪車および前記自転車の何れかである場合は追突によるヒヤリハット事象と分類する、請求項10記載の地図作成システム。
【請求項1】
車両に搭載されたステレオカメラで撮影された画像データから3次元画像情報を取得する3次元計測部と、
前記3次元計測部で算出された3次元画像情報に基づいて、自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出する障害物検出部と、
前記障害物検出部で検出された前記障害物判定候補領域に対して、距離情報に基づいて、自車両と障害物判定候補領域内の物体とが衝突する可能性があるか否かを判定する衝突可能性判定部と、
前記衝突可能性判定部で、前記自車両が前記物体と衝突する可能性があると判定された場合に、その時点の前後の前記画像データを少なくとも記録する記録部とを備える、運転記録装置。
【請求項2】
前記記録部には、
前記衝突可能性判定部で、前記自車両が前記物体と衝突する可能性があると判定された時点での前記自車両の位置情報が記録される、請求項1記載の運転記録装置。
【請求項3】
前記記録部には、前記物体の大きさの情報、動きの情報および速度情報がさらに記録される、請求項2記載の運転記録装置。
【請求項4】
前記障害物検出部は、第1画像内の所定の領域に対し、予め設定された所定値と現在の2次元オプティカルフローとの差を求め、この求めた差が所定の第1閾値以上である場合に、前記第1画像内の前記所定の領域を障害物判定候補領域として抽出する、請求項1記載の運転記録装置。
【請求項5】
前記障害物検出部における前記予め設定された所定値は、過去の2次元オプティカルフローである、請求項4記載の運転記録装置。
【請求項6】
前記障害物検出部における前記予め設定された所定値は、前記画像データに写し出された道路面の2次元オプティカルフローである、請求項4記載の運転記録装置。
【請求項7】
前記衝突可能性判定部は、
前記障害物検出部で抽出された前記障害物判定候補領域に対し、前記2次元オプティカルフローおよび前記3次元画像情報に含まれる距離情報に基づいて、3次元オプティカルフローを求め、前記障害物判定候補領域に対し、前記3次元オプティカルフローに基づいて、前記自車両と前記物体との衝突の可能性を判定する、請求項6記載の運転記録装置。
【請求項8】
前記衝突可能性判定部は、
前記自車両を含む立体を仮想した場合に、前記3次元オプティカルフローを含む線分と前記立体の境界面とが交差するか否かを判定することによって、前記自車両と前記物体とが衝突するか否かを判定する、請求項7記載の運転記録装置。
【請求項9】
請求項3記載の運転記録装置の前記記録部に記録された情報を取り込み、ヒヤリハット事例を解析してヒヤリハット地図を作成する地図作成システムであって、
前記記録部に記録された前記情報に基づいてヒヤリハット事例を解析し、ヒヤリハット対象およびヒヤリハット事象を分類する判定部と、
前記判定部で分類した前記ヒヤリハット対象および前記ヒヤリハット事象を、前記自車両の前記位置情報に基づいて地図上に書き込むことで前記ヒヤリハット地図を作成する地図作成部とを備える、地図作成システム。
【請求項10】
前記判定部は、
前記障害物判定候補領域内の前記物体の前記大きさの情報に基づいて、前記ヒヤリハット対象が、自動車、自動二輪車、自転車および人の何れであるかの分類を行うとともに、
前記障害物判定候補領域内の前記物体の前記動きの情報および前記速度の情報に基づいて、前記自車両および前記物体の予測進路を取得し、前記自車両および前記物体のそれぞれの前記予測進路の交差角度と前記ヒヤリハット対象の分類結果とに基づいて、前記ヒヤリハット事象を分類する、請求項9記載の地図作成システム。
【請求項11】
前記判定部は、
前記自車両および前記物体のそれぞれの前記予測進路の前記交差角度が60゜以上90゜未満である場合に、前記ヒヤリハット対象が前記自動車であれば、出会い頭によるヒヤリハット事象と分類し、前記ヒヤリハット対象が前記自動二輪車、前記自転車および前記人の何れかである場合は飛び出しによるヒヤリハット事象と分類し、
前記交差角度が20゜以上600゜未満である場合に、前記ヒヤリハット対象が前記自動車、前記自動二輪車および前記自転車の何れかである場合は割り込みによるヒヤリハット事象と分類し、
前記交差角度が20゜未満である場合に、前記ヒヤリハット対象が前記自動車、前記自動二輪車および前記自転車の何れかである場合は追突によるヒヤリハット事象と分類する、請求項10記載の地図作成システム。
【図1】

【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2011−134207(P2011−134207A)
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願番号】特願2009−294565(P2009−294565)
【出願日】平成21年12月25日(2009.12.25)
【出願人】(000001270)コニカミノルタホールディングス株式会社 (4,463)
【Fターム(参考)】
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願日】平成21年12月25日(2009.12.25)
【出願人】(000001270)コニカミノルタホールディングス株式会社 (4,463)
【Fターム(参考)】
[ Back to top ]