
運転評価装置
【課題】運転者個人に適した運転評価を行うこと。
【解決手段】運転評価装置1は、車両の状態量を示す状態情報と該状態量における危険度とを含む目標情報を複数記憶する目標状態記憶部13と、許容危険度に基づいて当該複数の目標情報から一の目標情報を選択する目標状態選択部14と、自車両の状態量を検出する車両状態検出部12と、検出された自車両の状態量に基づいて現在の危険度を推定する運転推定部15と、選択手段により選択された一の目標情報の危険度と推定された危険度とを比較して自車両の運転状況を判定する判定部16と、許容危険度と推定された危険度とに基づいて該許容危険度を修正する修正部18と、を備える。
【解決手段】運転評価装置1は、車両の状態量を示す状態情報と該状態量における危険度とを含む目標情報を複数記憶する目標状態記憶部13と、許容危険度に基づいて当該複数の目標情報から一の目標情報を選択する目標状態選択部14と、自車両の状態量を検出する車両状態検出部12と、検出された自車両の状態量に基づいて現在の危険度を推定する運転推定部15と、選択手段により選択された一の目標情報の危険度と推定された危険度とを比較して自車両の運転状況を判定する判定部16と、許容危険度と推定された危険度とに基づいて該許容危険度を修正する修正部18と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転者の操作を評価あるいは判定する運転評価装置に関する。
【背景技術】
【0002】
従来から、運転者の操作を評価する手法が知られている。例えば下記特許文献1には、最も近似度が高い仮想ドライバの運転意図を実際のドライバの運転意図として推定し、推定された運転意図に基づいてリスクポテンシャル(潜在的な危険度)を補正する運転意図推定装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−20910号公報
【特許文献2】特開2008−179355号公報
【特許文献3】特開2008−146332号公報
【特許文献4】特開平7−159525号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載の手法では車両周囲の状況やドライバの運転傾向が考慮されていないので、運転者個人に適した運転評価を行うのは困難である。
【0005】
本発明は上記課題を解決するためになされたものであり、運転者個人に適した運転評価を行うことが可能な運転評価装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の運転評価装置は、車両の状態量を示す状態情報と該状態量における危険度とを含む目標情報を複数記憶する目標記憶手段と、危険度に関する所定の基準値に基づいて、目標記憶手段に記憶されている複数の目標情報から一の目標情報を選択する選択手段と、自車両の状態量を検出する検出手段と、検出手段により検出された自車両の状態量に基づいて該自車両の危険度を推定する推定手段と、選択手段により選択された一の目標情報の危険度と推定手段により推定された危険度とを比較して自車両の運転状況を判定する判定手段と、基準値と推定手段により推定された危険度とに基づいて該基準値を修正する基準値修正手段と、を備える。
【0007】
このような発明によれば、所定の基準値に基づいて選択された目標情報の危険度と実際の運転の危険度とが比較されて運転状況が判定されると共に、その基準値と実際の運転の危険度とに基づいて基準値が修正される。これにより、次回の判定は運転者の運転傾向がより反映された基準値に基づいて実行されるので、運転者個人に適した運転評価を行うことが可能になる。
【0008】
本発明の運転評価装置は、車両の状態量を示す状態情報と該状態量における危険度とを含む目標情報を複数記憶する目標記憶手段と、危険度に関する所定の基準値に基づいて、目標記憶手段に記憶されている複数の目標情報から一の目標情報を選択する選択手段と、自車両の状態量を検出する検出手段と、検出手段により検出された自車両の状態量に基づいて該自車両の危険度を推定する推定手段と、選択手段により選択された一の目標情報の危険度と推定手段により推定された危険度との差分を危険度差として算出し、該危険度差と所定の差分閾値とを比較して自車両の運転状況を判定する判定手段と、差分閾値と危険度差との差に基づいて該差分閾値を修正する差分閾値修正手段と、を備える。
【0009】
このような発明によれば、所定の基準値に基づいて選択された目標情報の危険度と実際の運転の危険度との差分(危険度差)を差分閾値と比較することで運転状況が判定されると共に、差分閾値と危険度差との差に基づいて差分閾値が修正される。これにより、次回の判定は運転者の運転傾向がより反映された差分閾値に基づいて実行されることになるので、運転者個人に適した運転評価を行うことが可能になる。
【0010】
本発明の運転評価装置では、基準値修正手段は、基準値が所定の最大値を超えないように該基準値を増加してもよい。これにより基準値の修正幅が抑えられるので、運転を適切に評価できる。
【0011】
本発明の運転評価装置は、自車両の交差点の通過形態を推定する通過形態推定手段を更に備え、基準値修正手段は、通過形態推定手段により推定された通過形態毎に基準値を修正してもよい。これにより、基準値が交差点の通過形態毎に細かく設定されるので、より詳細に運転を評価することが可能になる。
【0012】
本発明の運転評価装置では、差分閾値修正手段は、差分閾値が所定の最大値を越えないように該差分閾値を増加してもよい。これにより差分閾値の修正幅が抑えられるので、運転を適切に評価できる。
【0013】
本発明の運転評価装置は、自車両の交差点の通過形態を推定する通過形態推定手段を更に備え、差分閾値修正手段は、通過形態推定手段により推定された通過形態毎に差分閾値を修正してもよい。これにより、差分閾値が交差点の通過形態毎に細かく設定されるので、より詳細に運転を評価することが可能になる。
【0014】
本発明の運転評価装置では、推定手段は、目標記憶手段に記憶されている複数の目標情報から、検出手段により検出された自車両の状態量に最も近似する状態情報を有する目標情報を選択し、選択された目標情報の危険度を自車両の危険度としてもよい。この場合には、目標情報を用いて自車両の状態を推定でき、自車両の危険度には選択された目標情報の情報を用いればよいので、危険度を簡単に推定することができる。
【0015】
本発明の運転評価装置では、状態情報で示される車両の状態量、及び検出手段により検出される自車両の状態量が、速度及びヨー角速度のうちの少なくとも一つを含んでもよい。これにより、車両の走行状態、特に速度の高低に基づいて危険度を判定(評価)できる。
【0016】
本発明の運転評価装置では、状態情報で示される車両の状態量、及び検出手段により検出される自車両の状態量が、アクセル操作量、ブレーキ操作量、及びステアリング操舵角度のうちの少なくとも一つを含んでもよい。これにより、運転操作に基づいて危険度を判定(評価)できる。
【0017】
本発明の運転評価装置は、推定手段により推定された自車両の危険度を記憶する危険度記憶手段を更に備え、判定手段は、選択された一の目標情報の危険度と危険度記憶手段に記憶された複数の危険度に基づく統計値とに基づいて自車両の運転状況を判定してもよい。このように、推定された複数の危険度から得た統計値を用いることで、判定(評価)のばらつきを抑えてより適切な判定結果(評価結果)を得ることができる。
【0018】
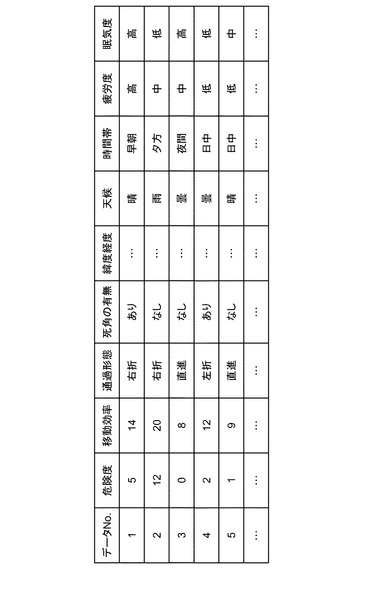
本発明の運転評価装置では、危険度記憶手段は、交差点の通過形態、運転者の生理状態、天候、及び時間帯のうちの少なくとも一つを自車両の危険度と関連付けて記憶してもよい。これにより、それらいずれかの情報を基準として危険度を判定することが可能になる。
【0019】
本発明の運転評価装置は、推定手段により推定された自車両の危険度を表示する表示手段を更に備えてもよい。これにより、運転者は自己の運転の危険度を把握することができる。
【0020】
本発明の運転評価装置では、表示手段は、推定手段により推定された自車両の危険度の履歴を時系列で表示してもよい。これにより、運転者はいつ危険な運転をしたか等を把握することができる。
【0021】
本発明の運転評価装置では、目標情報が車両の状態量における移動効率を更に含み、危険度に関する所定の基準値が危険度の閾値であり、選択手段は、危険度が閾値以下である目標情報のうち移動効率が最大である目標情報を選択し、基準値修正手段は、危険度の閾値と推定手段により推定された危険度との差に基づいて該閾値を修正してもよい。
【0022】
この場合、目標情報は危険度及び移動効率を考慮して選択される。具体的には、危険度が閾値以下である目標情報のうち移動効率が最大である目標情報が選択される。このような閾値を用いることで、望ましい目標情報を簡単に選択できる。また、次回の判定は運転者の運転傾向がより反映された閾値に基づいて実行されるので、運転者個人に適した運転評価を行うことが可能になる。
【0023】
本発明の運転評価装置では、目標情報が車両の状態量における移動効率を更に含み、基準値は、第1の係数で重み付けされた危険度と第2の係数で重み付けされた移動効率との和で表され、選択手段は、複数の目標情報から基準値が最大である目標情報を選択し、基準値修正手段は第1の係数又は第2の係数を修正してもよい。
【0024】
この場合、目標情報は危険度及び移動効率を考慮して選択され、具体的には危険度及び移動効率のそれぞれを重み付けして加算した値が最大となる目標情報が選択される。このような基準値を用いることで、望ましい目標情報を得ることができる。また、次回の判定では運転者の運転傾向がより反映された重み付け処理が実行されるので、運転者個人に適した運転評価を行うことが可能になる。
【0025】
本発明の運転評価装置では、状態情報が車両の状態量における移動効率を更に含み、基準値が、危険度を正規化した値をx、移動効率を正規化した値をyとして、a(1−x)及びbyのどちらか小さい方で表され(a,bは所定の定数)、選択手段は、複数の目標情報から基準値が最大である目標情報を選択し、基準値修正手段は定数a又はbを修正してもよい。
【0026】
この場合、目標情報は危険度及び移動効率を考慮して選択され、具体的には上記a(1−x)及びbyのどちらか小さい方が最大となる目標情報が選択される。このような基準値を用いることで、望ましい目標情報を得ることができる。また、次回の判定では運転者の運転傾向がより反映された係数に基づいて計算が実行されるので、運転者個人に適した運転評価を行うことが可能になる。
【発明の効果】
【0027】
このような運転評価装置によれば、運転状況の判定に用いられる基準値又は差分閾値が判定処理の度に調整されるので、運転者個人に適した運転評価を行うことができる。
【図面の簡単な説明】
【0028】
【図1】第1実施形態に係る運転評価装置の機能構成を示すブロック図である。
【図2】目標情報の例を示す図である。
【図3】目標情報を選択する方法を示す図である。
【図4】(a),(b)はそれぞれ、運転モデルの例を示す図である。
【図5】(a),(b)はそれぞれ、運転行動の推定方法を示す図である。
【図6】(a),(b)はそれぞれ、運転行動の別の推定方法を示す図である。
【図7】推定危険度の平均化を示す図である。
【図8】図1に示す運転評価装置の動作を示す図である。
【図9】図8に示す危険度推定処理の詳細を示す図である。
【図10】図8に示す許容危険度修正処理の詳細を示す図である。
【図11】許容危険度が修正されていく過程を示す図である。
【図12】第2実施形態に係る運転評価装置の機能構成を示すブロック図である。
【図13】図12に示す運転評価装置の動作を示す図である。
【図14】図13に示す差分閾値修正処理の詳細を示す図である。
【図15】第3実施形態に係る運転評価装置の機能構成を示すブロック図である。
【図16】図15に示す危険度記憶部に記憶されるデータの例を示す図である。
【図17】第4実施形態に係る運転評価装置の機能構成を示すブロック図である。
【図18】(a)〜(f)はそれぞれ、図17に示す表示部により表示される画面の例を示す図である。
【図19】図17に示す表示部により表示される画面の例を示す図である。
【図20】目標情報を選択する別の方法を示す図である。
【図21】目標情報を選択する更に別の方法を示す図である。
【発明を実施するための形態】
【0029】
以下、添付図面を参照しながら本発明の実施形態を詳細に説明する。なお、図面の説明において同一又は同等の要素には同一の符号を付し、重複する説明を省略する。
【0030】
(第1実施形態)
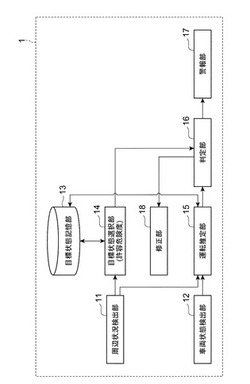
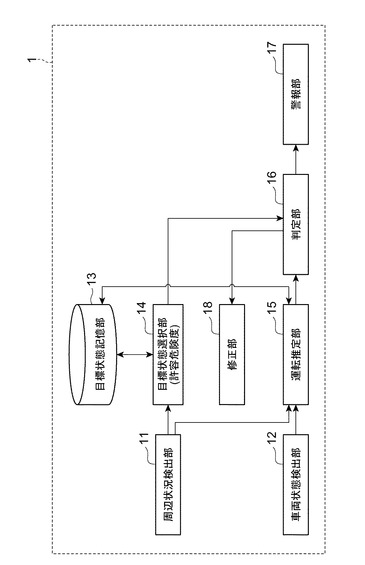
まず、図1〜7を用いて、第1実施形態に係る運転評価装置1の機能及び構成を説明する。運転評価装置1は、望ましい運転行動のモデルと実際の運転行動とを比較することで運転者の運転行動を評価する装置である。図1に示すように、運転評価装置1は機能的構成要素として周辺状況検出部11、車両状態検出部12、目標状態記憶部13、目標状態選択部14、運転推定部15、判定部16、警報部17、及び修正部18を備えている。
【0031】
周辺状況検出部11は、カメラやミリ波レーダ等の検出装置を含んで構成されており、車両周辺の障害物や道路上に描かれている白線などといった、車両周辺の状況(環境)を検出する手段である。周辺状況検出部11は所定の時間間隔で周辺状況を検出し、検出結果を周辺情報として目標状態選択部14及び運転推定部15に逐次出力する。なお、周辺環境を検出する具体的な装置・方法はカメラやミリ波レーダに限定されるものではなく、任意の装置・方法を用いてよい。
【0032】
車両状態検出部12は、車両の状態量を検出する手段である。車両状態検出部12は速度やヨー角速度などのような車両の走行状態を示す量を検出したり、アクセル操作量やブレーキ操作量、ステアリング操舵角度等のような運転者の操作状態を示す量を検出したりする。車両状態検出部12は所定の時間間隔で状態量を検出し、検出した状態量を逐次運転推定部15に出力する。車両状態検出部12は、検出する状態量に応じて、角速度センサやヨーレートセンサ、スロットルセンサ、ブレーキセンサ、操舵角センサ等の検出手段を含んでいるが、当然ながら、搭載される検出手段の種類や組合せはこれらに限定されない。
【0033】
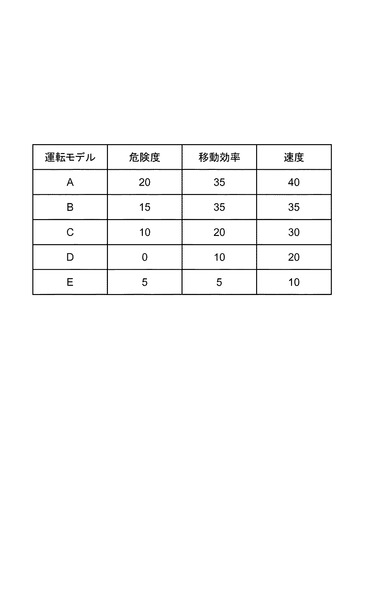
目標状態記憶部13は、メモリなどにより構成され、車両の状態量を示す状態情報とその状態量における危険度及び移動効率とを含む目標情報を複数記憶する手段である。この目標情報は、想定される運転行動をモデル化した情報であり、予め記憶されている。例として、5個の目標情報を図2に示す。危険度は、運転行動により何らかの危険(例えば衝突など)が運転者、同乗者、車両周辺にいる者、車両自体、あるいは周辺物に発生する可能性の大きさを示す指標である。移動効率は、単位時間当たりに車両が進む距離の大きさを示す指標である。目標情報は、運転行動を判定する場所(以下では「判定ポイント」という)の種類毎に複数用意される。例えば、目標状態記憶部13は交差点における運転行動を判定するための複数の目標情報や、急カーブにおける運転行動を判定するための複数の目標情報などを記憶する。
【0034】
図2の例ではモデルに関する状態量として速度が設定されているが、状態情報の構成はこれに限定されず、一又は複数の任意の状態量により構成されていてもよい。例えば、ヨー角速度やアクセル操作量、ブレーキ操作量、ステアリング操舵角度などを目標情報に含めて、これらの状態量に基づく評価を行うことができる。また、図2には判定ポイントの種類に関する情報が示されていないが、そのような情報が目標情報内に含まれていてもよい。
【0035】
目標状態選択部14は、電子制御ユニット(ECU)上で実現され、目標状態記憶部13に記憶されている複数の目標情報から、運転行動の判定に用いる一つの目標情報を選択する手段である。まず目標状態選択部14は、周辺状況検出部11から入力された周辺情報に基づいて、検出された判定ポイントに対応する目標情報を目標状態記憶部13から読み出す。例えば、入力された周辺情報が交差点を示していれば、目標状態選択部14は交差点での運転のモデルを示す目標情報を複数読み出す。続いて目標状態選択部14は、読み出した目標情報から一つの目標情報を選択し、判定部16に出力する。
【0036】
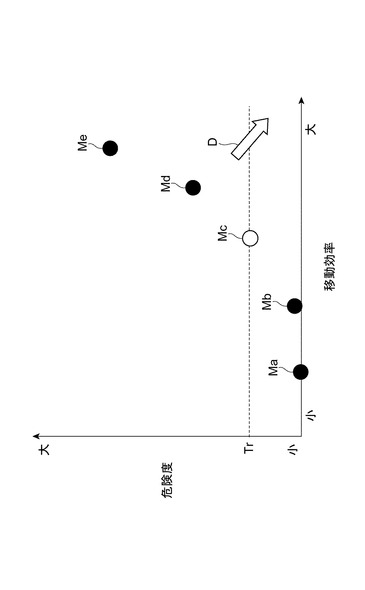
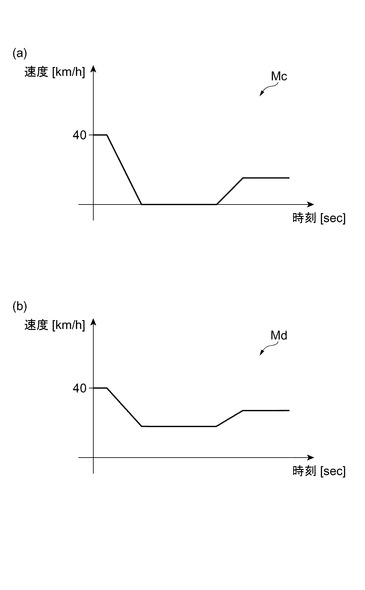
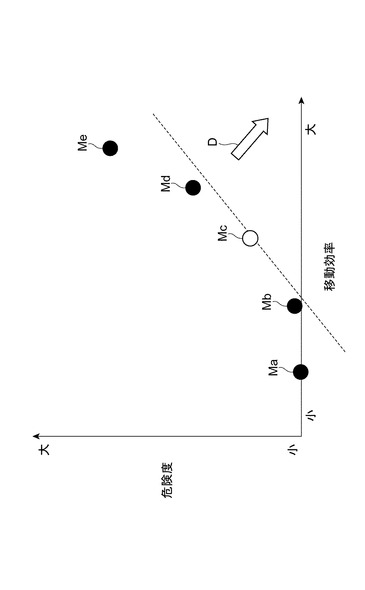
この選択処理について図3,4を参照しながら説明する。目標状態選択部14が交差点での運転モデルを示す5個の目標情報(モデル)Ma,Mb,…,Meを読み出したとすると、それらの目標情報は危険度及び移動効率に基づいて例えば図3のように配置される。また、目標情報Mc,Mdにより示される運転モデル(交差点内における速度変化の様子)を図4(a),(b)に示す。図4に示すように、交差点内での減速の度合いはモデルMcの方がモデルMdよりも大きいので、図3に示すように、モデルMcの方がモデルMdよりも危険度が小さいと言える。その一方で、移動効率に関してはモデルMdの方がモデルMcよりも優れていると言える。
【0037】
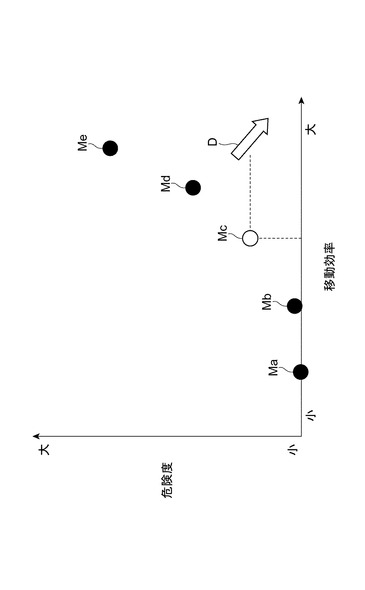
選択される目標情報は、危険度が低く且つ移動効率が大きいもの、すなわち図3の矢印Dで示される方向にある情報が好ましい。本実施形態において目標状態選択部14は、危険度に関する基準値である許容危険度を予め内部に保持しており、危険度がその閾値以下である目標情報のうち移動効率が最大である目標情報を選択する。許容危険度Trが図3のように設定されている場合には、目標状態選択部14は目標情報(モデル)Mcを選択する。なお、許容危険度は判定ポイントの種類毎に異なっていてもよいし、判定ポイントの種類にかかわらず共通であってもよい。
【0038】
運転推定部15は、ECU上で実現され、検出された車両状態に基づいて当該車両の現在の危険度を推定する手段である。まず運転推定部15は、目標状態選択部14と同様に、周辺状況検出部11から入力された周辺情報に対応する目標情報を目標状態記憶部13から読み出す。続いて、運転推定部15は各目標情報(各運転モデル)と車両状態検出部12から入力された状態量とを比較して、現在の運転行動に最も近い運転モデルを抽出する。
【0039】
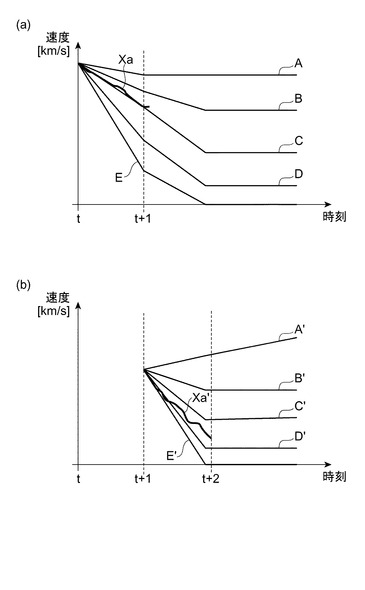
この抽出処理について図5を参照しながら説明する。図5(a)では、読み出された5個の運転モデル(交差点内における速度変化の様子を示す線)がA〜Eで示されており、時刻tからt+1にかけての実際の車両の速度変化が太線Xaで示されている。この場合、運転推定部15は運転モデルCが実際の速度変化Xに最も近いと判定し、時刻tにおいて運転者はモデルCで示される運転行動を取っていたと推定する。そして、運転推定部15は運転モデルCを示す目標情報の危険度を推定危険度として記憶する。その後、時刻t+1からt+2にかけて実際の車両の速度が図5(b)の太線Xa’に示すように変化した場合には、運転推定部15は対応する複数の目標情報を改めて目標状態記憶部13から抽出し、実際の速度変化と最も合致する運転モデルを現在の運転行動と推定する。図5(b)の例では、運転推定部15は、時刻t+1において運転者はモデルC’で示される運転行動を取っていたと推定し、当該モデルC’を示す目標情報の危険度を推定危険度として記憶する。
【0040】
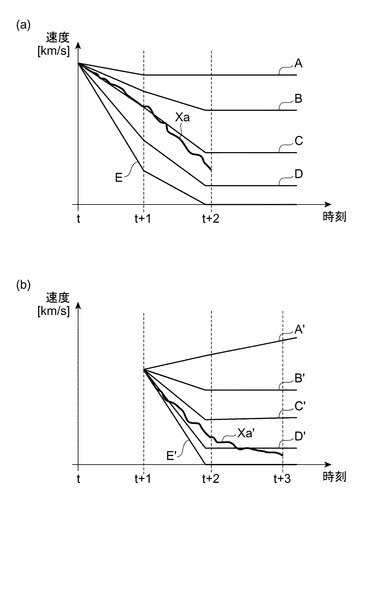
抽出処理において、運転推定部15は一つの推定危険度を得るための速度変化の観測時間を長く設定してもよい。具体的には、まず図6(a)に示すように、運転推定部15は、時刻tからt+2にかけての実際の速度変化Xaと運転モデルA〜Eとを比較して、時刻tにおいて運転者はモデルCで示される運転行動を取っていたと推定する。その後運転推定部15は、図6(b)に示すように、時刻t+1からt+3にかけての実際の速度変化Xa’と運転モデルA’〜E’とを比較して、時刻t+1において運転者はモデルD’で示される運転行動を取っていたと推定する。このように観測時間を長くすることで推定精度を高めることができる。
【0041】
なお、このような推定処理において、運転推定部15は実際の速度変化に近いモデルの目標情報を複数選択し、選択された目標情報の危険度に実際の速度変化への近似度に応じた重みを乗じて合算することで、推定危険度を求めてもよい。以下では、上記のような推定処理で得られた推定危険度を「推定危険度A」ともいう。運転推定部15は算出した推定危険度Aを内部に記憶し、且つ判定部16に出力する。
【0042】
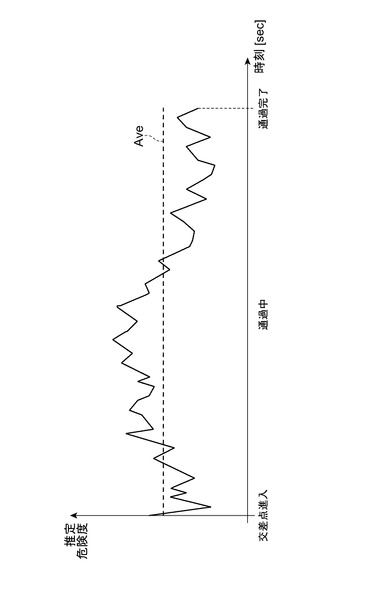
このような抽出処理を繰り返すことにより、ある一箇所の判定ポイントにおける推定危険度Aが運転推定部15内に蓄積される。蓄積された推定危険度Aはその都度瞬間的に求められているので、ばらつきが大きくなる。例えば、車両が交差点に入ってからそこを抜け出るまでの間における推定危険度Aは図7のように変わり得る。そこで運転推定部15は、判定ポイントを通過したか否かを周辺情報に基づいて判定し、通過したと判定した場合には推定危険度Aの平均値(図7の破線Ave参照)を算出する。そして、運転推定部15は算出した平均値をその判定ポイントでの推定危険度として判定部16に出力する。以下では、推定危険度Aの平均値を「推定危険度B」ともいう。
【0043】
判定部16は、ECU上で実現され、目標状態選択部14から入力された目標情報の危険度と運転推定部15から入力された推定危険度とを比較して現在の運転行動(車両の運転状況)を判定する手段である。
【0044】
判定部16は、例えば推定危険度Aが目標情報の危険度よりも大きい場合には警報部17を作動させ、そうでない場合には何も行わない。警報部17が作動することで、より安全な運転を促すための情報が運転者に向けて発せられる。また、判定部16は推定危険度Aに代えて推定危険度Bを用いて、上記と同様に警報の要否を判定してもよい。このような判定処理に加えて、判定部16は入力された推定危険度Bを修正部18に出力する。
【0045】
なお、警報部17の構成は任意であり、例えば音声情報やアラームを出力する装置や、警告灯を点灯・点滅させる装置などを含んで構成されてもよい。また、上記のように危険度を比較して警報部17を作動させることは、あくまでも警報処理の一例に過ぎず、危険度以外の条件に基づいて警報部17を作動させてもよい。
【0046】
修正部18は、ECU上で実現され、目標状態を選択する際に用いる許容危険度を修正(更新)する手段である。修正部18は推定危険度Bが一定量(例えば10個)蓄積されるのを待ってから、それらの推定危険度Bの平均値を算出する。すなわち、ここで算出される平均値は、複数の判定ポイントにおける推定危険度の平均値である。このような平均値を用いるのは、判定(評価)のばらつきを抑えてより適切な判定結果(評価結果)を得るためである。以下ではこの平均値を「推定危険度C」ともいう。続いて、修正部18はその推定ポイントに関する許容危険度を目標状態選択部14から読み出して推定危険度Cと許容危険度との差を算出し、その結果に応じて許容危険度を変更する。
【0047】
具体的には修正部18は、推定危険度Cの方が大きければ許容危険度を一定量だけ増やし、許容危険度の方が大きければ許容危険度を一定量だけ減らす。ただし、増加後の許容危険度が最大許容危険度を超えた場合には修正部18は許容危険度をその最大許容危険度に設定し、減少後の許容危険度が0未満となった場合には、修正部18は許容危険度を0に設定する。これは、許容危険度の修正幅を抑えて、実用的でない極端な評価基準が設定されることを防ぐためである。なお、最大許容危険度は予め設定されており、修正部18内に記憶されている。推定危険度Cと許容危険度とが等しい場合には、修正部18は許容危険度を変えない。修正部18は目標状態選択部14内の許容危険度を変更後の値で上書きする。
【0048】
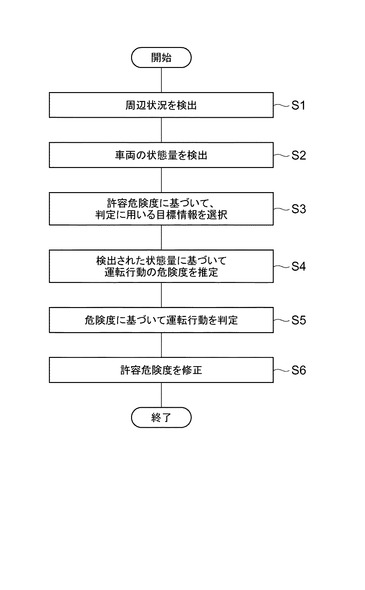
次に、図8〜10を用いて運転評価装置1の動作を説明する。動作の大きな流れは図8に示す通りである。まず、周辺状況検出部11が車両周辺の状況(環境)を検出し(ステップS1)、車両状態検出部12が速度などの状態量を検出する(ステップS2)。続いて、目標状態選択部14が許容危険度に基づいて、複数の目標情報の中から運転行動の判定に用いる一の目標情報を選択する(ステップS3)。また、運転推定部15が検出された車両の状態量と目標情報で示される運転モデルとを比較することで実際の運転行動の危険度(推定危険度A,B)を推定し、修正部18が危険度の平均(推定危険度C)を算出する(ステップS4)。続いて、判定部16が選択された目標情報の危険度と推定危険度とを比較することで運転行動を判定し、必要であれば警報部17を作動させる(ステップS5)。また、修正部18が許容危険度と推定危険度とを比較して当該許容危険度を修正する(ステップS6)。
【0049】
図8に示す処理は、車両が交差点などの判定ポイントを通過する度に繰り返し実行されるが、次のポイントで実行される上記ステップS1〜S5の処理では修正後の許容危険度が使用される。そして、図8の処理が繰り返されることで、許容危険度は最終的に運転者の運転傾向を反映した値に収束する。
【0050】
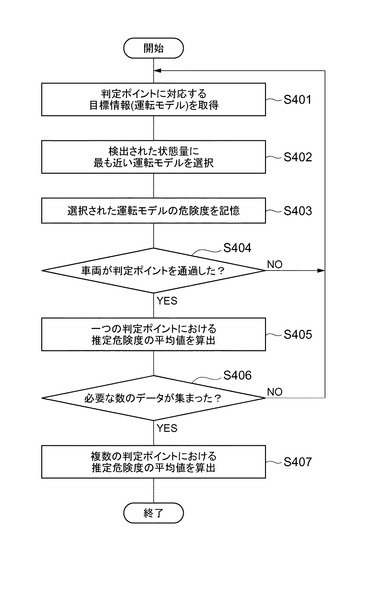
上記ステップS4の処理、すなわち運転推定部15が実際の運転行動の危険度を推定する処理は図9に示すように行われる。まず、判定ポイントに対応する複数の目標情報(運転モデル)が目標状態記憶部13から読み出され(ステップS401)、検出された状態量に最も近いモデルがその中から選択され(ステップS402)、選択されたモデルの危険度が推定危険度Aとして記憶される(ステップS403)。これらの処理は、車両が判定ポイントを通過するまで繰り返し実行される(ステップS404;NO)。そして、車両が判定ポイントを通過すると(ステップS404;YES)、その場所に関して蓄積された推定危険度の平均値(推定危険度B)が算出される(ステップS405)。
【0051】
上記ステップS401〜S405の処理は運転推定部15で実行されるものであり、車両が同種の判定ポイントを一定回数通過して推定危険度が一定量蓄積されるまで繰り返される(ステップS406;NO)。そして、修正部18において必要な数のデータが集まると(ステップS406)、複数の判定ポイントにおける推定危険度の平均値(推定危険度C)が算出される(ステップS407)。
【0052】
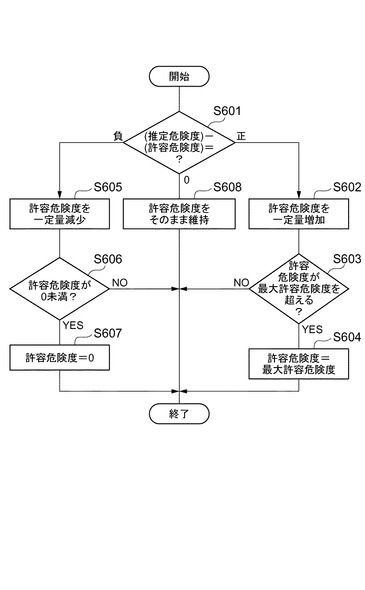
上記ステップS6の処理、すなわち修正部18が許容危険度を修正する処理は図10に示すように行われる。算出された推定危険度Cが許容危険度よりも大きい場合には(ステップS601;正)、許容危険度が一定量増やされる(ステップS602)。ただし、このとき修正後の許容危険度が最大許容危険度を超えているようであれば(ステップS603;YES)、許容危険度は最大許容危険度に修正される(ステップS604)。一方、推定危険度Cが許容危険度よりも小さい場合には(ステップS601;負)、許容危険度が一定量減らされる(ステップS605)。ただし、このとき修正後の許容危険度が0未満であれば(ステップS606;YES)、許容危険度は0に修正される(ステップS607)。以上に対して、推定危険度Cが許容危険度と等しければ(ステップS601;0)、許容危険度は修正されずにそのまま維持される(ステップS608)。
【0053】
以上説明したように、本実施形態によれば、許容危険度に基づいて選択された目標情報の危険度と実際の運転に基づく推定危険度とが比較されて運転状況が判定されると共に、許容危険度と推定危険度との差に基づいて許容危険度が修正される。これにより、次回の判定は運転者の運転傾向がより反映された許容危険度に基づいて実行されることになるので、運転者個人に適した運転評価を行うことが可能になる。また、許容危険度という閾値を用いることで、望ましい目標情報を簡単に選択できる。
【0054】
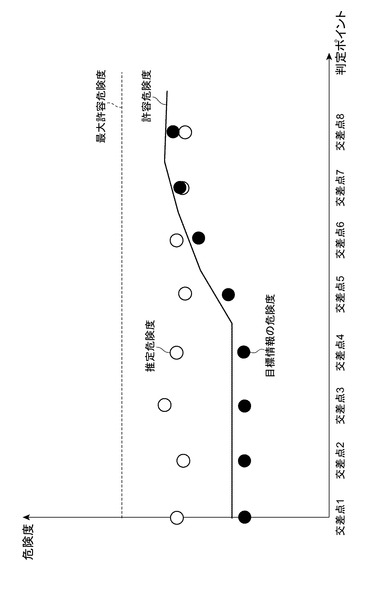
例えば、許容危険度は図11に示すように修正されていく。図11において、破線は最大許容危険度を示し、実線は許容危険度を示し、白丸は各交差点で算出される推定危険度を示し、黒丸は目標状態選択部14で選択される目標情報の危険度である。なお、図11の例では、同種の判定ポイントに関する直近の4個の推定危険度に基づいて許容危険度が修正されるものとし、車両が交差点1を通過する前において許容危険度には初期値が設定されているものとする。また、図11の例において、運転者は一貫して客観的に見て安全に運転しているものとする。
【0055】
車両が4箇所目の交差点4を通過して初めて許容危険度が修正されるので、交差点1〜4において判定に用いられる許容危険度は変わらず、したがって選択される目標情報も同じである。図11では、推定される危険度は常に目標情報の危険度よりも大きいので、車両が交差点4を通過した直後の修正処理では、許容危険度が増加する。
【0056】
車両が交差点5を通過した際には、上記処理により許容危険度が増加しているので、より危険度が高い目標情報が選択されて判定に用いられる。このときは推定危険度の方が目標情報の危険度よりも大きいので所定の警報処理が実行される。また、交差点2〜5における推定危険度に基づく修正処理により許容危険度が増加する。
【0057】
その後、車両が交差点6,7,8,…と通過する毎に許容危険度が修正されていき、実際の運転行動との乖離が解消されていく。これにより、評価基準である許容危険度が運転傾向に合ったレベルで安定し(図11の交差点7,8の箇所を参照)、本当に運転者に注意を促さなければならない場合にのみ警報が出されることになる。
【0058】
また本実施形態では、目標情報を用いて自車両の状態を推定でき、自車両の危険度には選択された目標情報の情報を用いればよいので、危険度を簡単に推定することができる。
【0059】
(第2実施形態)
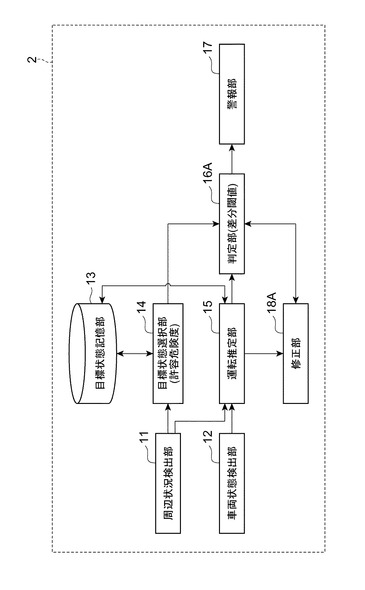
図12は、第2実施形態に係る運転評価装置2の機能構成を示すブロック図である。運転評価装置2は、第1実施形態における判定部16及び修正部18に代えて判定部16A及び修正部18Aを備える点で運転評価装置1と異なる。以下では、第1実施形態と同じ点については説明を省略し、異なる点のみを特に説明する。
【0060】
判定部16Aは、目標状態選択部14から入力された目標情報の危険度と運転推定部15から入力された推定危険度とを比較して現在の運転行動(車両の運転状況)を判定する手段である。判定部16Aは、推定危険度Aと目標情報の危険度との差分(危険度差)を算出する。続いて判定部16Aは、算出した危険度差と予め内部に記憶している差分閾値とを比較し、危険度差が差分閾値よりも大きい場合には警報部17を作動させ、そうでない場合には何も行わない。なお、差分閾値は判定ポイントの種類毎に異なっていてもよいし、判定ポイントの種類にかかわらず共通であってもよい。
【0061】
修正部18Aは、運転行動を判定する際に用いられる差分閾値を修正(更新)する手段である。修正部18Aは一定量蓄積された推定危険度Bに基づいて推定危険度Cを算出する。続いて、修正部18Aは対応する推定ポイントに関する許容危険度を目標状態選択部14から読み出して、推定危険度Cと許容危険度との差(危険度差)を算出する。続いて、修正部18Aは、当該推定ポイントに関する差分閾値を判定部16Aから読み出して危険度差と許容危険度との差を算出し、その結果に応じて差分閾値を変更する。
【0062】
具体的には修正部18Aは、危険度差の方が大きければ差分閾値を一定量だけ増やし、差分閾値の方が大きければ差分閾値を一定量だけ減らす。ただし、増加後の差分閾値が最大差分閾値を超えた場合には修正部18Aは差分閾値をその最大差分閾値に設定し、減少後の差分閾値が0未満となった場合には、修正部18Aは差分閾値を0に設定する。これは、差分閾値の修正幅を抑えて、実用的でない極端な評価基準が設定されることを防ぐためである。なお、最大差分閾値は予め設定されており、修正部18A内に記憶されている。危険度差と差分閾値とが等しい場合には、修正部18Aは差分閾値を変えない。修正部18Aは判定部16A内の差分閾値を変更後の値で上書きする。本実施形態では、目標状態選択部14内の許容危険度は修正されない。
【0063】
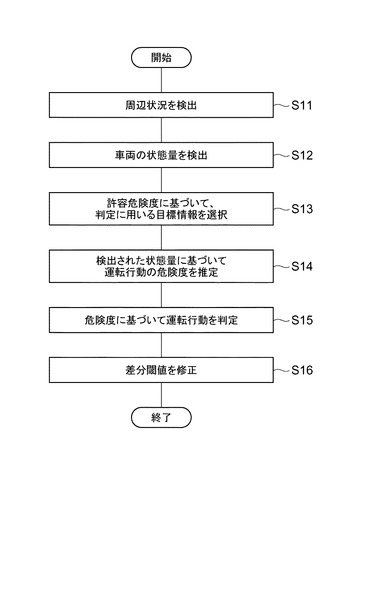
次に、図13,14を用いて運転評価装置2の動作を説明する。動作の大きな流れは図13に示す通りである。ステップS11〜S14の処理は、第1実施形態(図8)におけるステップS1〜S4の処理と同様である。続いて、判定部16Aが選択された目標情報の危険度と推定危険度との差を危険度差として算出し、その危険度差と差分閾値とを比較することで運転行動を判定し、必要であれば警報部17を作動させる(ステップS15)。また、修正部18Aが差分閾値と危険度差とを比較して当該差分閾値を修正する(ステップS16)。
【0064】
図13に示す処理は繰り返し実行されるが、次の判定ポイントで実行される上記ステップS1〜S5の処理では修正後の差分閾値が使用される。そして、図13の処理が繰り返されることで、差分閾値は最終的に運転者の運転傾向を反映した値に収束する。
【0065】
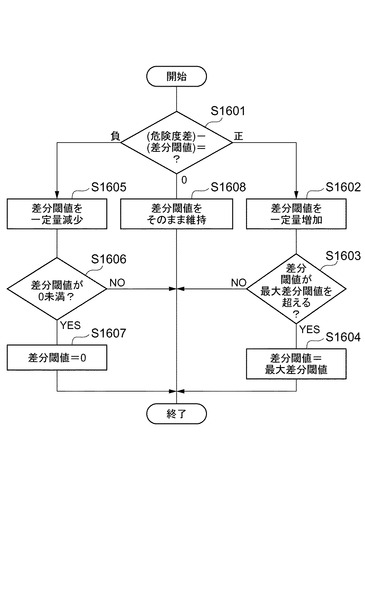
上記ステップS16の処理、すなわち修正部18Aが差分閾値を修正する処理は図14に示すように行われる。算出された危険度差が差分閾値よりも大きい場合には(ステップS1601;正)、差分閾値が一定量増やされる(ステップS1602)。ただし、このとき修正後の差分閾値が最大差分閾値を超えているようであれば(ステップS1603;YES)、差分閾値は最大差分閾値に修正される(ステップS1604)。一方、危険度差が差分閾値よりも小さい場合には(ステップS1601;負)、差分閾値が一定量減らされる(ステップS1605)。ただし、このとき修正後の差分閾値が0未満であれば(ステップS1606;YES)、差分閾値は0に修正される(ステップS1607)。以上に対して、危険度差が差分閾値と等しければ(ステップS1601;0)、差分閾値は修正されずにそのまま維持される(ステップS1608)。
【0066】
以上説明したように、本実施形態によれば、許容危険度に基づいて選択された目標情報の危険度と実際の運転の危険度との差分(危険度差)を差分閾値と比較することで運転状況が判定されると共に、差分閾値と危険度差との差に基づいて差分閾値が修正される。これにより、次回の判定は運転者の運転傾向がより反映された差分閾値に基づいて実行されることになるので、運転者個人に適した運転評価を行うことが可能になる。
【0067】
また、目標状態選択部14内の許容危険度ではなく、警報部17を制御する判定部16A内の差分閾値を調整することで、特定の報知処理又は特定の介入制御に対してのみ、評価基準を変えることができる。図12の例では分かりづらいが、例えば警報手段が複数種類存在したり運転操作に何らかの介入をする制御手段が更に加わるような場合には、所望の装置に対応する差分閾値のみを調整することで、一部の装置についてのみ評価基準を変えることができる。
【0068】
(第3実施形態)
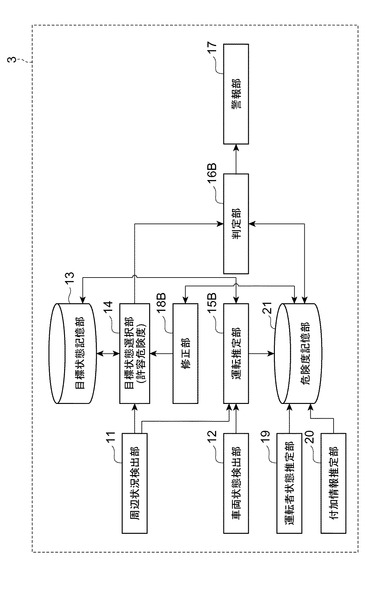
図15は、第3実施形態に係る運転評価装置3の機能構成を示すブロック図である。運転評価装置3は、運転者状態推定部19、付加情報推定部20、及び危険度記憶部21を備える点と、第1実施形態における運転推定部15、判定部16及び修正部18に代えて運転推定部15B、判定部16B、及び修正部18Bを備える点で、運転評価装置1と異なる。以下では、第1実施形態と同じ点については説明を省略し、異なる点のみを特に説明する。
【0069】
運転者状態推定部19は、運転者の生理状態を推定する手段である。運転者状態推定部19は公知の手法により疲労度や眠気度などの生理状態を推定し、運転者情報として危険度記憶部21に出力する。なお、運転者状態推定部19が推定する生理状態の種類は限定されない。
【0070】
付加情報推定部20は、交差点の通過形態、交差点における死角の有無、天候、時間帯、緯度経度などといった付加情報を推定する手段である。これらの付加情報も公知の手法により取得される。ここで、交差点の通過形態とは、車両が交差点内で進む方向を示し、例えば直進、右折、左折などの情報で示される。交差点の通過形態は、カーナビゲーションシステムや全地球測位システム(GPS)、慣性計測装置、マップマッチング技術、ステアリング角度、ウィンカの状態などから推定可能である。また、ベイジアンネットワークを用いて交差点の通過形態を推定することも可能である。付加情報推定部20は上記のような付加情報を生成して危険度記憶部21に出力する。なお、付加情報の内容は上記のものに限定されない。
【0071】
運転推定部15Bは、第1実施形態における運転推定部15と同様の手法で当該車両の現在の危険度及び移動効率を推定する手段である。運転推定部15Bは、判定ポイントである交差点を通過する度に、走行状態に最も近い運転モデル(目標情報)の危険度及び移動効率を求め、それらを推定危険度A及び推定移動効率として危険度記憶部21に出力する。
【0072】
危険度記憶部21は、運転推定部15Bから入力された推定危険度A及び推定移動効率を運転者情報及び付加情報と関連付けて記憶する手段である。危険度記憶部21の構成、及びそこに記憶されるデータの例を図16に示す。なお、データNOはデータを特定するための識別子である。データの表現方法は図16の例に限定されず、例えば時間帯や疲労度、眠気度を数値で表してもよい。
【0073】
判定部16Bは、目標状態選択部14から入力された目標情報の危険度と危険度記憶部21に記憶されている推定危険度とを比較して現在の運転行動(車両の運転状況)を判定する手段である。第1実施形態における判定部16と異なるのは、判定部16Bが特定の生理状態または付加情報についての推定危険度Aに基づいて警報の要否を判定する点である。判定の具体的な方法は第1実施形態と同様である。また、判定部16Bは推定危険度Aに代えて推定危険度Bを用いて警報の要否を判定してもよい。
【0074】
修正部18Bは、危険度記憶部21に記憶されている推定危険度に基づいて許容危険度を修正(更新)する手段である。修正部18Bは、推定ポイントに関する許容危険度を目標状態選択部14から読み出すと共に、特定の生理状態又は付加情報についての推定危険度Cを算出する。続いて修正部18Bは、推定危険度Cと許容危険度との差を算出し、第1実施形態における修正部18と同様に、算出結果に応じて許容危険度を変更する。ただし、このときに求まる許容危険度は特定の生理状態又は付加情報に対するものである。修正部18Bは目標状態選択部14内の許容危険度を変更後の値で上書き又は登録する。これにより、許容危険度は例えば交差点の通過形態や疲労度毎に細かく設定されることになる。
【0075】
以上説明したように、本実施形態によれば第1実施形態と同様の効果が得られる。また、許容危険度が運転者の生理状態や付加情報に基づいて細かく設定されるので、より詳細に運転を評価することが可能になる。なお、本実施形態と同様の機能構成を第2実施形態における運転評価装置2に適用すれば、差分閾値が同様に細かく設定されるので、より詳細に運転を評価することが可能になる。
【0076】
(第4実施形態)
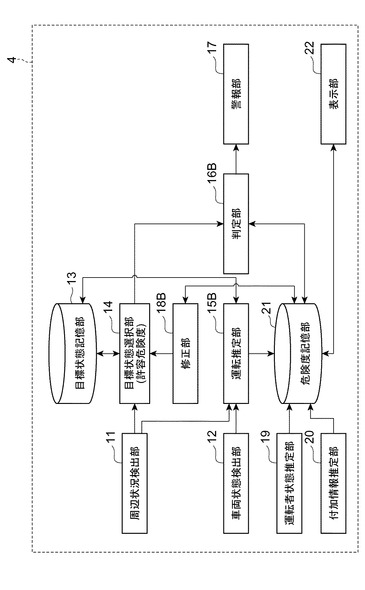
図17は、第4実施形態に係る運転評価装置4の機能構成を示すブロック図である。運転評価装置4は、第3実施形態における運転評価装置3に表示部22を追加したものである。そこで、以下では表示部22に関する機能について述べ、他の部分についての説明を省略する。
【0077】
表示部22は小型モニタを含んで構成され、運転推定部15で算出された推定危険度を表示する手段である。運転者等による入力や図示しない他の車載システムからの入力を契機として、表示部22は危険度記憶部21内のデータを読み出し、そのデータに基づいて表示画面を生成しモニタ上に映す。
【0078】
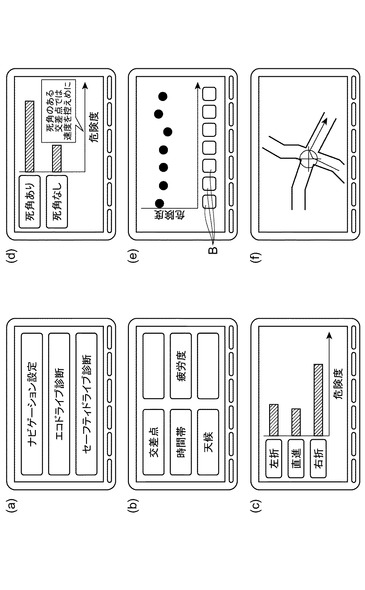
表示部22は例えば図18,19に示すような画面を表示する。図18は推定された危険度を診断結果として運転者に提示する画面の例である。図18(a)に示すメニュー画面において運転者が「セーフティドライブ診断」を選択すると、図18(b)に示す画面に切り替わる。この画面で、運転者は危険度を集計する基準となる詳細項目を選択する。詳細項目は、図16における運転者情報や付加情報に対応する。
【0079】
図18(b)の画面で例えば運転者が「交差点」を選択すると図18(c)に示す画面に切り替わり、交差点での通過形態毎に危険度が表示される。なお、このときに処理される推定危険度の時間的範囲は任意であり、例えば直近10箇所における危険度を処理したものであってもよいし、危険度の全履歴を処理したものであってもよい。例えば図18(c)の画面から、右折時にリスクを好む傾向が見て取れる。
【0080】
図18(c)の画面において例えば「右折」を選択すると図18(d)に示す画面に切り替わり、死角の有無と危険度との関係が表示されると共に、運転者に注意を促すコメントが表示される。また、図18(e)のように各交差点での推定危険度を時系列で表示してもよい。運転者は図18(e)の画面にあるボタンBを押すことで、対応する交差点の地図を見ることができる(図18(f)参照)。
【0081】
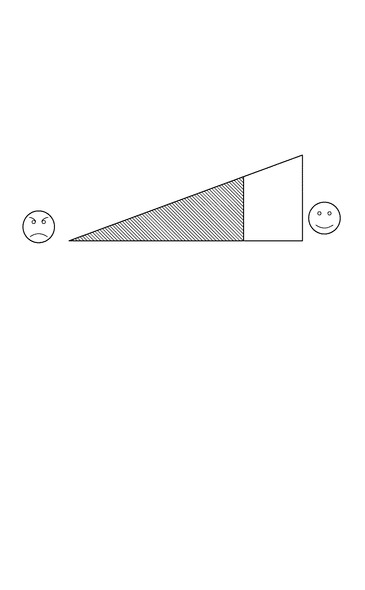
図19は推定危険度の履歴から算出された運転者の運転傾向を示すインジケータの例である。図19の例ではハッチングされている部分が表示値を示し、値が左側に位置するほどリスク選好の傾向が強く、右側であるほどリスク回避の傾向が強いことを示している。
【0082】
以上説明したように、本実施形態によれば第3実施形態と同様の効果が得られる。また本実施形態によれば運転者は自己の運転の危険度を把握することができる。具体的には運転者は、いつ危険な運転をしたかや、自身がどのような状態のときに危険な運転をしがちか等を把握できる。
【0083】
以上、本発明をその実施形態に基づいて詳細に説明した。しかし、本発明は上記実施形態に限定されるものではない。本発明は、その要旨を逸脱しない範囲で様々な変形が可能である。
【0084】
上記各実施形態では、目標状態選択部14が、危険度が許容危険度以下である目標情報のうち移動効率が最大である目標情報を選択したが、目標情報の選択方法はこれに限定されない。
【0085】
例えば選択手段は、危険度の−a倍と移動効率のb倍との和が最大となる目標状態、すなわち、危険度をx、移動効率をyとして基準値(−ax+by)が最大となる目標情報を選択してもよい。ここで、a,bは所定の定数であり、危険度及び移動効率を重み付けする役割を持つ。概念的には、図20に示す破線を方向Dに向けて移動させたときに最後にその線と接する運転モデルが選択される。この場合、基準値修正手段は、基準値と推定危険度とに基づいて定数a,bを修正する。
【0086】
また選択手段は、危険度を0から1の間で正規化した値をx、移動効率を0から1の間で正規化した値をyとして、a(1−x)及びbyのどちらか小さい方を基準値とし、当該基準値が最大となる目標情報を選択してもよい。ここで、a,bは所定の定数であり、危険度及び移動効率を重み付けする役割を持つ。概念的には、図21に示す破線を方向Dに向けて移動させたときに最後にその線と接する運転モデルが選択される。この場合、基準値修正手段は基準値と推定危険度とに基づいて定数a,bを修正する。
【0087】
これらの変形例においても、望ましい目標情報が得られ、次回の判定では運転者の運転傾向がより反映された係数a,bに基づいて計算が実行されるので、運転者個人に適した運転評価を行うことが可能になる。
【符号の説明】
【0088】
1,2,3,4…運転評価装置、11…周辺状況検出部、12…車両状態検出部(検出手段)、13…目標状態記憶部(目標記憶手段)、14…目標状態選択部(選択手段)、15,15B…運転推定部(推定手段)、16,16A,16B…判定部(判定手段)、17…警報部、18,18B…修正部(基準値修正手段)、18A…修正部(差分閾値修正手段)、19…運転者状態推定部、20…付加情報推定部(通過形態推定手段)、21…危険度記憶部(危険度記憶手段)、22…表示部(表示手段)。
【技術分野】
【0001】
本発明は、運転者の操作を評価あるいは判定する運転評価装置に関する。
【背景技術】
【0002】
従来から、運転者の操作を評価する手法が知られている。例えば下記特許文献1には、最も近似度が高い仮想ドライバの運転意図を実際のドライバの運転意図として推定し、推定された運転意図に基づいてリスクポテンシャル(潜在的な危険度)を補正する運転意図推定装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−20910号公報
【特許文献2】特開2008−179355号公報
【特許文献3】特開2008−146332号公報
【特許文献4】特開平7−159525号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載の手法では車両周囲の状況やドライバの運転傾向が考慮されていないので、運転者個人に適した運転評価を行うのは困難である。
【0005】
本発明は上記課題を解決するためになされたものであり、運転者個人に適した運転評価を行うことが可能な運転評価装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の運転評価装置は、車両の状態量を示す状態情報と該状態量における危険度とを含む目標情報を複数記憶する目標記憶手段と、危険度に関する所定の基準値に基づいて、目標記憶手段に記憶されている複数の目標情報から一の目標情報を選択する選択手段と、自車両の状態量を検出する検出手段と、検出手段により検出された自車両の状態量に基づいて該自車両の危険度を推定する推定手段と、選択手段により選択された一の目標情報の危険度と推定手段により推定された危険度とを比較して自車両の運転状況を判定する判定手段と、基準値と推定手段により推定された危険度とに基づいて該基準値を修正する基準値修正手段と、を備える。
【0007】
このような発明によれば、所定の基準値に基づいて選択された目標情報の危険度と実際の運転の危険度とが比較されて運転状況が判定されると共に、その基準値と実際の運転の危険度とに基づいて基準値が修正される。これにより、次回の判定は運転者の運転傾向がより反映された基準値に基づいて実行されるので、運転者個人に適した運転評価を行うことが可能になる。
【0008】
本発明の運転評価装置は、車両の状態量を示す状態情報と該状態量における危険度とを含む目標情報を複数記憶する目標記憶手段と、危険度に関する所定の基準値に基づいて、目標記憶手段に記憶されている複数の目標情報から一の目標情報を選択する選択手段と、自車両の状態量を検出する検出手段と、検出手段により検出された自車両の状態量に基づいて該自車両の危険度を推定する推定手段と、選択手段により選択された一の目標情報の危険度と推定手段により推定された危険度との差分を危険度差として算出し、該危険度差と所定の差分閾値とを比較して自車両の運転状況を判定する判定手段と、差分閾値と危険度差との差に基づいて該差分閾値を修正する差分閾値修正手段と、を備える。
【0009】
このような発明によれば、所定の基準値に基づいて選択された目標情報の危険度と実際の運転の危険度との差分(危険度差)を差分閾値と比較することで運転状況が判定されると共に、差分閾値と危険度差との差に基づいて差分閾値が修正される。これにより、次回の判定は運転者の運転傾向がより反映された差分閾値に基づいて実行されることになるので、運転者個人に適した運転評価を行うことが可能になる。
【0010】
本発明の運転評価装置では、基準値修正手段は、基準値が所定の最大値を超えないように該基準値を増加してもよい。これにより基準値の修正幅が抑えられるので、運転を適切に評価できる。
【0011】
本発明の運転評価装置は、自車両の交差点の通過形態を推定する通過形態推定手段を更に備え、基準値修正手段は、通過形態推定手段により推定された通過形態毎に基準値を修正してもよい。これにより、基準値が交差点の通過形態毎に細かく設定されるので、より詳細に運転を評価することが可能になる。
【0012】
本発明の運転評価装置では、差分閾値修正手段は、差分閾値が所定の最大値を越えないように該差分閾値を増加してもよい。これにより差分閾値の修正幅が抑えられるので、運転を適切に評価できる。
【0013】
本発明の運転評価装置は、自車両の交差点の通過形態を推定する通過形態推定手段を更に備え、差分閾値修正手段は、通過形態推定手段により推定された通過形態毎に差分閾値を修正してもよい。これにより、差分閾値が交差点の通過形態毎に細かく設定されるので、より詳細に運転を評価することが可能になる。
【0014】
本発明の運転評価装置では、推定手段は、目標記憶手段に記憶されている複数の目標情報から、検出手段により検出された自車両の状態量に最も近似する状態情報を有する目標情報を選択し、選択された目標情報の危険度を自車両の危険度としてもよい。この場合には、目標情報を用いて自車両の状態を推定でき、自車両の危険度には選択された目標情報の情報を用いればよいので、危険度を簡単に推定することができる。
【0015】
本発明の運転評価装置では、状態情報で示される車両の状態量、及び検出手段により検出される自車両の状態量が、速度及びヨー角速度のうちの少なくとも一つを含んでもよい。これにより、車両の走行状態、特に速度の高低に基づいて危険度を判定(評価)できる。
【0016】
本発明の運転評価装置では、状態情報で示される車両の状態量、及び検出手段により検出される自車両の状態量が、アクセル操作量、ブレーキ操作量、及びステアリング操舵角度のうちの少なくとも一つを含んでもよい。これにより、運転操作に基づいて危険度を判定(評価)できる。
【0017】
本発明の運転評価装置は、推定手段により推定された自車両の危険度を記憶する危険度記憶手段を更に備え、判定手段は、選択された一の目標情報の危険度と危険度記憶手段に記憶された複数の危険度に基づく統計値とに基づいて自車両の運転状況を判定してもよい。このように、推定された複数の危険度から得た統計値を用いることで、判定(評価)のばらつきを抑えてより適切な判定結果(評価結果)を得ることができる。
【0018】
本発明の運転評価装置では、危険度記憶手段は、交差点の通過形態、運転者の生理状態、天候、及び時間帯のうちの少なくとも一つを自車両の危険度と関連付けて記憶してもよい。これにより、それらいずれかの情報を基準として危険度を判定することが可能になる。
【0019】
本発明の運転評価装置は、推定手段により推定された自車両の危険度を表示する表示手段を更に備えてもよい。これにより、運転者は自己の運転の危険度を把握することができる。
【0020】
本発明の運転評価装置では、表示手段は、推定手段により推定された自車両の危険度の履歴を時系列で表示してもよい。これにより、運転者はいつ危険な運転をしたか等を把握することができる。
【0021】
本発明の運転評価装置では、目標情報が車両の状態量における移動効率を更に含み、危険度に関する所定の基準値が危険度の閾値であり、選択手段は、危険度が閾値以下である目標情報のうち移動効率が最大である目標情報を選択し、基準値修正手段は、危険度の閾値と推定手段により推定された危険度との差に基づいて該閾値を修正してもよい。
【0022】
この場合、目標情報は危険度及び移動効率を考慮して選択される。具体的には、危険度が閾値以下である目標情報のうち移動効率が最大である目標情報が選択される。このような閾値を用いることで、望ましい目標情報を簡単に選択できる。また、次回の判定は運転者の運転傾向がより反映された閾値に基づいて実行されるので、運転者個人に適した運転評価を行うことが可能になる。
【0023】
本発明の運転評価装置では、目標情報が車両の状態量における移動効率を更に含み、基準値は、第1の係数で重み付けされた危険度と第2の係数で重み付けされた移動効率との和で表され、選択手段は、複数の目標情報から基準値が最大である目標情報を選択し、基準値修正手段は第1の係数又は第2の係数を修正してもよい。
【0024】
この場合、目標情報は危険度及び移動効率を考慮して選択され、具体的には危険度及び移動効率のそれぞれを重み付けして加算した値が最大となる目標情報が選択される。このような基準値を用いることで、望ましい目標情報を得ることができる。また、次回の判定では運転者の運転傾向がより反映された重み付け処理が実行されるので、運転者個人に適した運転評価を行うことが可能になる。
【0025】
本発明の運転評価装置では、状態情報が車両の状態量における移動効率を更に含み、基準値が、危険度を正規化した値をx、移動効率を正規化した値をyとして、a(1−x)及びbyのどちらか小さい方で表され(a,bは所定の定数)、選択手段は、複数の目標情報から基準値が最大である目標情報を選択し、基準値修正手段は定数a又はbを修正してもよい。
【0026】
この場合、目標情報は危険度及び移動効率を考慮して選択され、具体的には上記a(1−x)及びbyのどちらか小さい方が最大となる目標情報が選択される。このような基準値を用いることで、望ましい目標情報を得ることができる。また、次回の判定では運転者の運転傾向がより反映された係数に基づいて計算が実行されるので、運転者個人に適した運転評価を行うことが可能になる。
【発明の効果】
【0027】
このような運転評価装置によれば、運転状況の判定に用いられる基準値又は差分閾値が判定処理の度に調整されるので、運転者個人に適した運転評価を行うことができる。
【図面の簡単な説明】
【0028】
【図1】第1実施形態に係る運転評価装置の機能構成を示すブロック図である。
【図2】目標情報の例を示す図である。
【図3】目標情報を選択する方法を示す図である。
【図4】(a),(b)はそれぞれ、運転モデルの例を示す図である。
【図5】(a),(b)はそれぞれ、運転行動の推定方法を示す図である。
【図6】(a),(b)はそれぞれ、運転行動の別の推定方法を示す図である。
【図7】推定危険度の平均化を示す図である。
【図8】図1に示す運転評価装置の動作を示す図である。
【図9】図8に示す危険度推定処理の詳細を示す図である。
【図10】図8に示す許容危険度修正処理の詳細を示す図である。
【図11】許容危険度が修正されていく過程を示す図である。
【図12】第2実施形態に係る運転評価装置の機能構成を示すブロック図である。
【図13】図12に示す運転評価装置の動作を示す図である。
【図14】図13に示す差分閾値修正処理の詳細を示す図である。
【図15】第3実施形態に係る運転評価装置の機能構成を示すブロック図である。
【図16】図15に示す危険度記憶部に記憶されるデータの例を示す図である。
【図17】第4実施形態に係る運転評価装置の機能構成を示すブロック図である。
【図18】(a)〜(f)はそれぞれ、図17に示す表示部により表示される画面の例を示す図である。
【図19】図17に示す表示部により表示される画面の例を示す図である。
【図20】目標情報を選択する別の方法を示す図である。
【図21】目標情報を選択する更に別の方法を示す図である。
【発明を実施するための形態】
【0029】
以下、添付図面を参照しながら本発明の実施形態を詳細に説明する。なお、図面の説明において同一又は同等の要素には同一の符号を付し、重複する説明を省略する。
【0030】
(第1実施形態)
まず、図1〜7を用いて、第1実施形態に係る運転評価装置1の機能及び構成を説明する。運転評価装置1は、望ましい運転行動のモデルと実際の運転行動とを比較することで運転者の運転行動を評価する装置である。図1に示すように、運転評価装置1は機能的構成要素として周辺状況検出部11、車両状態検出部12、目標状態記憶部13、目標状態選択部14、運転推定部15、判定部16、警報部17、及び修正部18を備えている。
【0031】
周辺状況検出部11は、カメラやミリ波レーダ等の検出装置を含んで構成されており、車両周辺の障害物や道路上に描かれている白線などといった、車両周辺の状況(環境)を検出する手段である。周辺状況検出部11は所定の時間間隔で周辺状況を検出し、検出結果を周辺情報として目標状態選択部14及び運転推定部15に逐次出力する。なお、周辺環境を検出する具体的な装置・方法はカメラやミリ波レーダに限定されるものではなく、任意の装置・方法を用いてよい。
【0032】
車両状態検出部12は、車両の状態量を検出する手段である。車両状態検出部12は速度やヨー角速度などのような車両の走行状態を示す量を検出したり、アクセル操作量やブレーキ操作量、ステアリング操舵角度等のような運転者の操作状態を示す量を検出したりする。車両状態検出部12は所定の時間間隔で状態量を検出し、検出した状態量を逐次運転推定部15に出力する。車両状態検出部12は、検出する状態量に応じて、角速度センサやヨーレートセンサ、スロットルセンサ、ブレーキセンサ、操舵角センサ等の検出手段を含んでいるが、当然ながら、搭載される検出手段の種類や組合せはこれらに限定されない。
【0033】
目標状態記憶部13は、メモリなどにより構成され、車両の状態量を示す状態情報とその状態量における危険度及び移動効率とを含む目標情報を複数記憶する手段である。この目標情報は、想定される運転行動をモデル化した情報であり、予め記憶されている。例として、5個の目標情報を図2に示す。危険度は、運転行動により何らかの危険(例えば衝突など)が運転者、同乗者、車両周辺にいる者、車両自体、あるいは周辺物に発生する可能性の大きさを示す指標である。移動効率は、単位時間当たりに車両が進む距離の大きさを示す指標である。目標情報は、運転行動を判定する場所(以下では「判定ポイント」という)の種類毎に複数用意される。例えば、目標状態記憶部13は交差点における運転行動を判定するための複数の目標情報や、急カーブにおける運転行動を判定するための複数の目標情報などを記憶する。
【0034】
図2の例ではモデルに関する状態量として速度が設定されているが、状態情報の構成はこれに限定されず、一又は複数の任意の状態量により構成されていてもよい。例えば、ヨー角速度やアクセル操作量、ブレーキ操作量、ステアリング操舵角度などを目標情報に含めて、これらの状態量に基づく評価を行うことができる。また、図2には判定ポイントの種類に関する情報が示されていないが、そのような情報が目標情報内に含まれていてもよい。
【0035】
目標状態選択部14は、電子制御ユニット(ECU)上で実現され、目標状態記憶部13に記憶されている複数の目標情報から、運転行動の判定に用いる一つの目標情報を選択する手段である。まず目標状態選択部14は、周辺状況検出部11から入力された周辺情報に基づいて、検出された判定ポイントに対応する目標情報を目標状態記憶部13から読み出す。例えば、入力された周辺情報が交差点を示していれば、目標状態選択部14は交差点での運転のモデルを示す目標情報を複数読み出す。続いて目標状態選択部14は、読み出した目標情報から一つの目標情報を選択し、判定部16に出力する。
【0036】
この選択処理について図3,4を参照しながら説明する。目標状態選択部14が交差点での運転モデルを示す5個の目標情報(モデル)Ma,Mb,…,Meを読み出したとすると、それらの目標情報は危険度及び移動効率に基づいて例えば図3のように配置される。また、目標情報Mc,Mdにより示される運転モデル(交差点内における速度変化の様子)を図4(a),(b)に示す。図4に示すように、交差点内での減速の度合いはモデルMcの方がモデルMdよりも大きいので、図3に示すように、モデルMcの方がモデルMdよりも危険度が小さいと言える。その一方で、移動効率に関してはモデルMdの方がモデルMcよりも優れていると言える。
【0037】
選択される目標情報は、危険度が低く且つ移動効率が大きいもの、すなわち図3の矢印Dで示される方向にある情報が好ましい。本実施形態において目標状態選択部14は、危険度に関する基準値である許容危険度を予め内部に保持しており、危険度がその閾値以下である目標情報のうち移動効率が最大である目標情報を選択する。許容危険度Trが図3のように設定されている場合には、目標状態選択部14は目標情報(モデル)Mcを選択する。なお、許容危険度は判定ポイントの種類毎に異なっていてもよいし、判定ポイントの種類にかかわらず共通であってもよい。
【0038】
運転推定部15は、ECU上で実現され、検出された車両状態に基づいて当該車両の現在の危険度を推定する手段である。まず運転推定部15は、目標状態選択部14と同様に、周辺状況検出部11から入力された周辺情報に対応する目標情報を目標状態記憶部13から読み出す。続いて、運転推定部15は各目標情報(各運転モデル)と車両状態検出部12から入力された状態量とを比較して、現在の運転行動に最も近い運転モデルを抽出する。
【0039】
この抽出処理について図5を参照しながら説明する。図5(a)では、読み出された5個の運転モデル(交差点内における速度変化の様子を示す線)がA〜Eで示されており、時刻tからt+1にかけての実際の車両の速度変化が太線Xaで示されている。この場合、運転推定部15は運転モデルCが実際の速度変化Xに最も近いと判定し、時刻tにおいて運転者はモデルCで示される運転行動を取っていたと推定する。そして、運転推定部15は運転モデルCを示す目標情報の危険度を推定危険度として記憶する。その後、時刻t+1からt+2にかけて実際の車両の速度が図5(b)の太線Xa’に示すように変化した場合には、運転推定部15は対応する複数の目標情報を改めて目標状態記憶部13から抽出し、実際の速度変化と最も合致する運転モデルを現在の運転行動と推定する。図5(b)の例では、運転推定部15は、時刻t+1において運転者はモデルC’で示される運転行動を取っていたと推定し、当該モデルC’を示す目標情報の危険度を推定危険度として記憶する。
【0040】
抽出処理において、運転推定部15は一つの推定危険度を得るための速度変化の観測時間を長く設定してもよい。具体的には、まず図6(a)に示すように、運転推定部15は、時刻tからt+2にかけての実際の速度変化Xaと運転モデルA〜Eとを比較して、時刻tにおいて運転者はモデルCで示される運転行動を取っていたと推定する。その後運転推定部15は、図6(b)に示すように、時刻t+1からt+3にかけての実際の速度変化Xa’と運転モデルA’〜E’とを比較して、時刻t+1において運転者はモデルD’で示される運転行動を取っていたと推定する。このように観測時間を長くすることで推定精度を高めることができる。
【0041】
なお、このような推定処理において、運転推定部15は実際の速度変化に近いモデルの目標情報を複数選択し、選択された目標情報の危険度に実際の速度変化への近似度に応じた重みを乗じて合算することで、推定危険度を求めてもよい。以下では、上記のような推定処理で得られた推定危険度を「推定危険度A」ともいう。運転推定部15は算出した推定危険度Aを内部に記憶し、且つ判定部16に出力する。
【0042】
このような抽出処理を繰り返すことにより、ある一箇所の判定ポイントにおける推定危険度Aが運転推定部15内に蓄積される。蓄積された推定危険度Aはその都度瞬間的に求められているので、ばらつきが大きくなる。例えば、車両が交差点に入ってからそこを抜け出るまでの間における推定危険度Aは図7のように変わり得る。そこで運転推定部15は、判定ポイントを通過したか否かを周辺情報に基づいて判定し、通過したと判定した場合には推定危険度Aの平均値(図7の破線Ave参照)を算出する。そして、運転推定部15は算出した平均値をその判定ポイントでの推定危険度として判定部16に出力する。以下では、推定危険度Aの平均値を「推定危険度B」ともいう。
【0043】
判定部16は、ECU上で実現され、目標状態選択部14から入力された目標情報の危険度と運転推定部15から入力された推定危険度とを比較して現在の運転行動(車両の運転状況)を判定する手段である。
【0044】
判定部16は、例えば推定危険度Aが目標情報の危険度よりも大きい場合には警報部17を作動させ、そうでない場合には何も行わない。警報部17が作動することで、より安全な運転を促すための情報が運転者に向けて発せられる。また、判定部16は推定危険度Aに代えて推定危険度Bを用いて、上記と同様に警報の要否を判定してもよい。このような判定処理に加えて、判定部16は入力された推定危険度Bを修正部18に出力する。
【0045】
なお、警報部17の構成は任意であり、例えば音声情報やアラームを出力する装置や、警告灯を点灯・点滅させる装置などを含んで構成されてもよい。また、上記のように危険度を比較して警報部17を作動させることは、あくまでも警報処理の一例に過ぎず、危険度以外の条件に基づいて警報部17を作動させてもよい。
【0046】
修正部18は、ECU上で実現され、目標状態を選択する際に用いる許容危険度を修正(更新)する手段である。修正部18は推定危険度Bが一定量(例えば10個)蓄積されるのを待ってから、それらの推定危険度Bの平均値を算出する。すなわち、ここで算出される平均値は、複数の判定ポイントにおける推定危険度の平均値である。このような平均値を用いるのは、判定(評価)のばらつきを抑えてより適切な判定結果(評価結果)を得るためである。以下ではこの平均値を「推定危険度C」ともいう。続いて、修正部18はその推定ポイントに関する許容危険度を目標状態選択部14から読み出して推定危険度Cと許容危険度との差を算出し、その結果に応じて許容危険度を変更する。
【0047】
具体的には修正部18は、推定危険度Cの方が大きければ許容危険度を一定量だけ増やし、許容危険度の方が大きければ許容危険度を一定量だけ減らす。ただし、増加後の許容危険度が最大許容危険度を超えた場合には修正部18は許容危険度をその最大許容危険度に設定し、減少後の許容危険度が0未満となった場合には、修正部18は許容危険度を0に設定する。これは、許容危険度の修正幅を抑えて、実用的でない極端な評価基準が設定されることを防ぐためである。なお、最大許容危険度は予め設定されており、修正部18内に記憶されている。推定危険度Cと許容危険度とが等しい場合には、修正部18は許容危険度を変えない。修正部18は目標状態選択部14内の許容危険度を変更後の値で上書きする。
【0048】
次に、図8〜10を用いて運転評価装置1の動作を説明する。動作の大きな流れは図8に示す通りである。まず、周辺状況検出部11が車両周辺の状況(環境)を検出し(ステップS1)、車両状態検出部12が速度などの状態量を検出する(ステップS2)。続いて、目標状態選択部14が許容危険度に基づいて、複数の目標情報の中から運転行動の判定に用いる一の目標情報を選択する(ステップS3)。また、運転推定部15が検出された車両の状態量と目標情報で示される運転モデルとを比較することで実際の運転行動の危険度(推定危険度A,B)を推定し、修正部18が危険度の平均(推定危険度C)を算出する(ステップS4)。続いて、判定部16が選択された目標情報の危険度と推定危険度とを比較することで運転行動を判定し、必要であれば警報部17を作動させる(ステップS5)。また、修正部18が許容危険度と推定危険度とを比較して当該許容危険度を修正する(ステップS6)。
【0049】
図8に示す処理は、車両が交差点などの判定ポイントを通過する度に繰り返し実行されるが、次のポイントで実行される上記ステップS1〜S5の処理では修正後の許容危険度が使用される。そして、図8の処理が繰り返されることで、許容危険度は最終的に運転者の運転傾向を反映した値に収束する。
【0050】
上記ステップS4の処理、すなわち運転推定部15が実際の運転行動の危険度を推定する処理は図9に示すように行われる。まず、判定ポイントに対応する複数の目標情報(運転モデル)が目標状態記憶部13から読み出され(ステップS401)、検出された状態量に最も近いモデルがその中から選択され(ステップS402)、選択されたモデルの危険度が推定危険度Aとして記憶される(ステップS403)。これらの処理は、車両が判定ポイントを通過するまで繰り返し実行される(ステップS404;NO)。そして、車両が判定ポイントを通過すると(ステップS404;YES)、その場所に関して蓄積された推定危険度の平均値(推定危険度B)が算出される(ステップS405)。
【0051】
上記ステップS401〜S405の処理は運転推定部15で実行されるものであり、車両が同種の判定ポイントを一定回数通過して推定危険度が一定量蓄積されるまで繰り返される(ステップS406;NO)。そして、修正部18において必要な数のデータが集まると(ステップS406)、複数の判定ポイントにおける推定危険度の平均値(推定危険度C)が算出される(ステップS407)。
【0052】
上記ステップS6の処理、すなわち修正部18が許容危険度を修正する処理は図10に示すように行われる。算出された推定危険度Cが許容危険度よりも大きい場合には(ステップS601;正)、許容危険度が一定量増やされる(ステップS602)。ただし、このとき修正後の許容危険度が最大許容危険度を超えているようであれば(ステップS603;YES)、許容危険度は最大許容危険度に修正される(ステップS604)。一方、推定危険度Cが許容危険度よりも小さい場合には(ステップS601;負)、許容危険度が一定量減らされる(ステップS605)。ただし、このとき修正後の許容危険度が0未満であれば(ステップS606;YES)、許容危険度は0に修正される(ステップS607)。以上に対して、推定危険度Cが許容危険度と等しければ(ステップS601;0)、許容危険度は修正されずにそのまま維持される(ステップS608)。
【0053】
以上説明したように、本実施形態によれば、許容危険度に基づいて選択された目標情報の危険度と実際の運転に基づく推定危険度とが比較されて運転状況が判定されると共に、許容危険度と推定危険度との差に基づいて許容危険度が修正される。これにより、次回の判定は運転者の運転傾向がより反映された許容危険度に基づいて実行されることになるので、運転者個人に適した運転評価を行うことが可能になる。また、許容危険度という閾値を用いることで、望ましい目標情報を簡単に選択できる。
【0054】
例えば、許容危険度は図11に示すように修正されていく。図11において、破線は最大許容危険度を示し、実線は許容危険度を示し、白丸は各交差点で算出される推定危険度を示し、黒丸は目標状態選択部14で選択される目標情報の危険度である。なお、図11の例では、同種の判定ポイントに関する直近の4個の推定危険度に基づいて許容危険度が修正されるものとし、車両が交差点1を通過する前において許容危険度には初期値が設定されているものとする。また、図11の例において、運転者は一貫して客観的に見て安全に運転しているものとする。
【0055】
車両が4箇所目の交差点4を通過して初めて許容危険度が修正されるので、交差点1〜4において判定に用いられる許容危険度は変わらず、したがって選択される目標情報も同じである。図11では、推定される危険度は常に目標情報の危険度よりも大きいので、車両が交差点4を通過した直後の修正処理では、許容危険度が増加する。
【0056】
車両が交差点5を通過した際には、上記処理により許容危険度が増加しているので、より危険度が高い目標情報が選択されて判定に用いられる。このときは推定危険度の方が目標情報の危険度よりも大きいので所定の警報処理が実行される。また、交差点2〜5における推定危険度に基づく修正処理により許容危険度が増加する。
【0057】
その後、車両が交差点6,7,8,…と通過する毎に許容危険度が修正されていき、実際の運転行動との乖離が解消されていく。これにより、評価基準である許容危険度が運転傾向に合ったレベルで安定し(図11の交差点7,8の箇所を参照)、本当に運転者に注意を促さなければならない場合にのみ警報が出されることになる。
【0058】
また本実施形態では、目標情報を用いて自車両の状態を推定でき、自車両の危険度には選択された目標情報の情報を用いればよいので、危険度を簡単に推定することができる。
【0059】
(第2実施形態)
図12は、第2実施形態に係る運転評価装置2の機能構成を示すブロック図である。運転評価装置2は、第1実施形態における判定部16及び修正部18に代えて判定部16A及び修正部18Aを備える点で運転評価装置1と異なる。以下では、第1実施形態と同じ点については説明を省略し、異なる点のみを特に説明する。
【0060】
判定部16Aは、目標状態選択部14から入力された目標情報の危険度と運転推定部15から入力された推定危険度とを比較して現在の運転行動(車両の運転状況)を判定する手段である。判定部16Aは、推定危険度Aと目標情報の危険度との差分(危険度差)を算出する。続いて判定部16Aは、算出した危険度差と予め内部に記憶している差分閾値とを比較し、危険度差が差分閾値よりも大きい場合には警報部17を作動させ、そうでない場合には何も行わない。なお、差分閾値は判定ポイントの種類毎に異なっていてもよいし、判定ポイントの種類にかかわらず共通であってもよい。
【0061】
修正部18Aは、運転行動を判定する際に用いられる差分閾値を修正(更新)する手段である。修正部18Aは一定量蓄積された推定危険度Bに基づいて推定危険度Cを算出する。続いて、修正部18Aは対応する推定ポイントに関する許容危険度を目標状態選択部14から読み出して、推定危険度Cと許容危険度との差(危険度差)を算出する。続いて、修正部18Aは、当該推定ポイントに関する差分閾値を判定部16Aから読み出して危険度差と許容危険度との差を算出し、その結果に応じて差分閾値を変更する。
【0062】
具体的には修正部18Aは、危険度差の方が大きければ差分閾値を一定量だけ増やし、差分閾値の方が大きければ差分閾値を一定量だけ減らす。ただし、増加後の差分閾値が最大差分閾値を超えた場合には修正部18Aは差分閾値をその最大差分閾値に設定し、減少後の差分閾値が0未満となった場合には、修正部18Aは差分閾値を0に設定する。これは、差分閾値の修正幅を抑えて、実用的でない極端な評価基準が設定されることを防ぐためである。なお、最大差分閾値は予め設定されており、修正部18A内に記憶されている。危険度差と差分閾値とが等しい場合には、修正部18Aは差分閾値を変えない。修正部18Aは判定部16A内の差分閾値を変更後の値で上書きする。本実施形態では、目標状態選択部14内の許容危険度は修正されない。
【0063】
次に、図13,14を用いて運転評価装置2の動作を説明する。動作の大きな流れは図13に示す通りである。ステップS11〜S14の処理は、第1実施形態(図8)におけるステップS1〜S4の処理と同様である。続いて、判定部16Aが選択された目標情報の危険度と推定危険度との差を危険度差として算出し、その危険度差と差分閾値とを比較することで運転行動を判定し、必要であれば警報部17を作動させる(ステップS15)。また、修正部18Aが差分閾値と危険度差とを比較して当該差分閾値を修正する(ステップS16)。
【0064】
図13に示す処理は繰り返し実行されるが、次の判定ポイントで実行される上記ステップS1〜S5の処理では修正後の差分閾値が使用される。そして、図13の処理が繰り返されることで、差分閾値は最終的に運転者の運転傾向を反映した値に収束する。
【0065】
上記ステップS16の処理、すなわち修正部18Aが差分閾値を修正する処理は図14に示すように行われる。算出された危険度差が差分閾値よりも大きい場合には(ステップS1601;正)、差分閾値が一定量増やされる(ステップS1602)。ただし、このとき修正後の差分閾値が最大差分閾値を超えているようであれば(ステップS1603;YES)、差分閾値は最大差分閾値に修正される(ステップS1604)。一方、危険度差が差分閾値よりも小さい場合には(ステップS1601;負)、差分閾値が一定量減らされる(ステップS1605)。ただし、このとき修正後の差分閾値が0未満であれば(ステップS1606;YES)、差分閾値は0に修正される(ステップS1607)。以上に対して、危険度差が差分閾値と等しければ(ステップS1601;0)、差分閾値は修正されずにそのまま維持される(ステップS1608)。
【0066】
以上説明したように、本実施形態によれば、許容危険度に基づいて選択された目標情報の危険度と実際の運転の危険度との差分(危険度差)を差分閾値と比較することで運転状況が判定されると共に、差分閾値と危険度差との差に基づいて差分閾値が修正される。これにより、次回の判定は運転者の運転傾向がより反映された差分閾値に基づいて実行されることになるので、運転者個人に適した運転評価を行うことが可能になる。
【0067】
また、目標状態選択部14内の許容危険度ではなく、警報部17を制御する判定部16A内の差分閾値を調整することで、特定の報知処理又は特定の介入制御に対してのみ、評価基準を変えることができる。図12の例では分かりづらいが、例えば警報手段が複数種類存在したり運転操作に何らかの介入をする制御手段が更に加わるような場合には、所望の装置に対応する差分閾値のみを調整することで、一部の装置についてのみ評価基準を変えることができる。
【0068】
(第3実施形態)
図15は、第3実施形態に係る運転評価装置3の機能構成を示すブロック図である。運転評価装置3は、運転者状態推定部19、付加情報推定部20、及び危険度記憶部21を備える点と、第1実施形態における運転推定部15、判定部16及び修正部18に代えて運転推定部15B、判定部16B、及び修正部18Bを備える点で、運転評価装置1と異なる。以下では、第1実施形態と同じ点については説明を省略し、異なる点のみを特に説明する。
【0069】
運転者状態推定部19は、運転者の生理状態を推定する手段である。運転者状態推定部19は公知の手法により疲労度や眠気度などの生理状態を推定し、運転者情報として危険度記憶部21に出力する。なお、運転者状態推定部19が推定する生理状態の種類は限定されない。
【0070】
付加情報推定部20は、交差点の通過形態、交差点における死角の有無、天候、時間帯、緯度経度などといった付加情報を推定する手段である。これらの付加情報も公知の手法により取得される。ここで、交差点の通過形態とは、車両が交差点内で進む方向を示し、例えば直進、右折、左折などの情報で示される。交差点の通過形態は、カーナビゲーションシステムや全地球測位システム(GPS)、慣性計測装置、マップマッチング技術、ステアリング角度、ウィンカの状態などから推定可能である。また、ベイジアンネットワークを用いて交差点の通過形態を推定することも可能である。付加情報推定部20は上記のような付加情報を生成して危険度記憶部21に出力する。なお、付加情報の内容は上記のものに限定されない。
【0071】
運転推定部15Bは、第1実施形態における運転推定部15と同様の手法で当該車両の現在の危険度及び移動効率を推定する手段である。運転推定部15Bは、判定ポイントである交差点を通過する度に、走行状態に最も近い運転モデル(目標情報)の危険度及び移動効率を求め、それらを推定危険度A及び推定移動効率として危険度記憶部21に出力する。
【0072】
危険度記憶部21は、運転推定部15Bから入力された推定危険度A及び推定移動効率を運転者情報及び付加情報と関連付けて記憶する手段である。危険度記憶部21の構成、及びそこに記憶されるデータの例を図16に示す。なお、データNOはデータを特定するための識別子である。データの表現方法は図16の例に限定されず、例えば時間帯や疲労度、眠気度を数値で表してもよい。
【0073】
判定部16Bは、目標状態選択部14から入力された目標情報の危険度と危険度記憶部21に記憶されている推定危険度とを比較して現在の運転行動(車両の運転状況)を判定する手段である。第1実施形態における判定部16と異なるのは、判定部16Bが特定の生理状態または付加情報についての推定危険度Aに基づいて警報の要否を判定する点である。判定の具体的な方法は第1実施形態と同様である。また、判定部16Bは推定危険度Aに代えて推定危険度Bを用いて警報の要否を判定してもよい。
【0074】
修正部18Bは、危険度記憶部21に記憶されている推定危険度に基づいて許容危険度を修正(更新)する手段である。修正部18Bは、推定ポイントに関する許容危険度を目標状態選択部14から読み出すと共に、特定の生理状態又は付加情報についての推定危険度Cを算出する。続いて修正部18Bは、推定危険度Cと許容危険度との差を算出し、第1実施形態における修正部18と同様に、算出結果に応じて許容危険度を変更する。ただし、このときに求まる許容危険度は特定の生理状態又は付加情報に対するものである。修正部18Bは目標状態選択部14内の許容危険度を変更後の値で上書き又は登録する。これにより、許容危険度は例えば交差点の通過形態や疲労度毎に細かく設定されることになる。
【0075】
以上説明したように、本実施形態によれば第1実施形態と同様の効果が得られる。また、許容危険度が運転者の生理状態や付加情報に基づいて細かく設定されるので、より詳細に運転を評価することが可能になる。なお、本実施形態と同様の機能構成を第2実施形態における運転評価装置2に適用すれば、差分閾値が同様に細かく設定されるので、より詳細に運転を評価することが可能になる。
【0076】
(第4実施形態)
図17は、第4実施形態に係る運転評価装置4の機能構成を示すブロック図である。運転評価装置4は、第3実施形態における運転評価装置3に表示部22を追加したものである。そこで、以下では表示部22に関する機能について述べ、他の部分についての説明を省略する。
【0077】
表示部22は小型モニタを含んで構成され、運転推定部15で算出された推定危険度を表示する手段である。運転者等による入力や図示しない他の車載システムからの入力を契機として、表示部22は危険度記憶部21内のデータを読み出し、そのデータに基づいて表示画面を生成しモニタ上に映す。
【0078】
表示部22は例えば図18,19に示すような画面を表示する。図18は推定された危険度を診断結果として運転者に提示する画面の例である。図18(a)に示すメニュー画面において運転者が「セーフティドライブ診断」を選択すると、図18(b)に示す画面に切り替わる。この画面で、運転者は危険度を集計する基準となる詳細項目を選択する。詳細項目は、図16における運転者情報や付加情報に対応する。
【0079】
図18(b)の画面で例えば運転者が「交差点」を選択すると図18(c)に示す画面に切り替わり、交差点での通過形態毎に危険度が表示される。なお、このときに処理される推定危険度の時間的範囲は任意であり、例えば直近10箇所における危険度を処理したものであってもよいし、危険度の全履歴を処理したものであってもよい。例えば図18(c)の画面から、右折時にリスクを好む傾向が見て取れる。
【0080】
図18(c)の画面において例えば「右折」を選択すると図18(d)に示す画面に切り替わり、死角の有無と危険度との関係が表示されると共に、運転者に注意を促すコメントが表示される。また、図18(e)のように各交差点での推定危険度を時系列で表示してもよい。運転者は図18(e)の画面にあるボタンBを押すことで、対応する交差点の地図を見ることができる(図18(f)参照)。
【0081】
図19は推定危険度の履歴から算出された運転者の運転傾向を示すインジケータの例である。図19の例ではハッチングされている部分が表示値を示し、値が左側に位置するほどリスク選好の傾向が強く、右側であるほどリスク回避の傾向が強いことを示している。
【0082】
以上説明したように、本実施形態によれば第3実施形態と同様の効果が得られる。また本実施形態によれば運転者は自己の運転の危険度を把握することができる。具体的には運転者は、いつ危険な運転をしたかや、自身がどのような状態のときに危険な運転をしがちか等を把握できる。
【0083】
以上、本発明をその実施形態に基づいて詳細に説明した。しかし、本発明は上記実施形態に限定されるものではない。本発明は、その要旨を逸脱しない範囲で様々な変形が可能である。
【0084】
上記各実施形態では、目標状態選択部14が、危険度が許容危険度以下である目標情報のうち移動効率が最大である目標情報を選択したが、目標情報の選択方法はこれに限定されない。
【0085】
例えば選択手段は、危険度の−a倍と移動効率のb倍との和が最大となる目標状態、すなわち、危険度をx、移動効率をyとして基準値(−ax+by)が最大となる目標情報を選択してもよい。ここで、a,bは所定の定数であり、危険度及び移動効率を重み付けする役割を持つ。概念的には、図20に示す破線を方向Dに向けて移動させたときに最後にその線と接する運転モデルが選択される。この場合、基準値修正手段は、基準値と推定危険度とに基づいて定数a,bを修正する。
【0086】
また選択手段は、危険度を0から1の間で正規化した値をx、移動効率を0から1の間で正規化した値をyとして、a(1−x)及びbyのどちらか小さい方を基準値とし、当該基準値が最大となる目標情報を選択してもよい。ここで、a,bは所定の定数であり、危険度及び移動効率を重み付けする役割を持つ。概念的には、図21に示す破線を方向Dに向けて移動させたときに最後にその線と接する運転モデルが選択される。この場合、基準値修正手段は基準値と推定危険度とに基づいて定数a,bを修正する。
【0087】
これらの変形例においても、望ましい目標情報が得られ、次回の判定では運転者の運転傾向がより反映された係数a,bに基づいて計算が実行されるので、運転者個人に適した運転評価を行うことが可能になる。
【符号の説明】
【0088】
1,2,3,4…運転評価装置、11…周辺状況検出部、12…車両状態検出部(検出手段)、13…目標状態記憶部(目標記憶手段)、14…目標状態選択部(選択手段)、15,15B…運転推定部(推定手段)、16,16A,16B…判定部(判定手段)、17…警報部、18,18B…修正部(基準値修正手段)、18A…修正部(差分閾値修正手段)、19…運転者状態推定部、20…付加情報推定部(通過形態推定手段)、21…危険度記憶部(危険度記憶手段)、22…表示部(表示手段)。
【特許請求の範囲】
【請求項1】
車両の状態量を示す状態情報と該状態量における危険度とを含む目標情報を複数記憶する目標記憶手段と、
前記危険度に関する所定の基準値に基づいて、前記目標記憶手段に記憶されている複数の目標情報から一の目標情報を選択する選択手段と、
自車両の状態量を検出する検出手段と、
前記検出手段により検出された自車両の状態量に基づいて該自車両の危険度を推定する推定手段と、
前記選択手段により選択された一の目標情報の危険度と前記推定手段により推定された危険度とを比較して前記自車両の運転状況を判定する判定手段と、
前記基準値と前記推定手段により推定された危険度とに基づいて該基準値を修正する基準値修正手段と、
を備える運転評価装置。
【請求項2】
車両の状態量を示す状態情報と該状態量における危険度とを含む目標情報を複数記憶する目標記憶手段と、
前記危険度に関する所定の基準値に基づいて、前記目標記憶手段に記憶されている複数の目標情報から一の目標情報を選択する選択手段と、
自車両の状態量を検出する検出手段と、
前記検出手段により検出された自車両の状態量に基づいて該自車両の危険度を推定する推定手段と、
前記選択手段により選択された一の目標情報の危険度と前記推定手段により推定された危険度との差分を危険度差として算出し、該危険度差と所定の差分閾値とを比較して前記自車両の運転状況を判定する判定手段と、
前記差分閾値と前記危険度差との差に基づいて該差分閾値を修正する差分閾値修正手段と、
を備える運転評価装置。
【請求項3】
前記基準値修正手段は、前記基準値が所定の最大値を超えないように該基準値を増加する、
請求項1に記載の運転評価装置。
【請求項4】
前記自車両の交差点の通過形態を推定する通過形態推定手段を更に備え、
前記基準値修正手段は、前記通過形態推定手段により推定された通過形態毎に前記基準値を修正する、
請求項1又は3に記載の運転評価装置。
【請求項5】
前記差分閾値修正手段は、前記差分閾値が所定の最大値を越えないように該差分閾値を増加する、
請求項2に記載の運転評価装置。
【請求項6】
前記自車両の交差点の通過形態を推定する通過形態推定手段を更に備え、
前記差分閾値修正手段は、前記通過形態推定手段により推定された通過形態毎に前記差分閾値を修正する、
請求項2又は5に記載の運転評価装置。
【請求項7】
前記推定手段は、前記目標記憶手段に記憶されている複数の目標情報から、前記検出手段により検出された自車両の状態量に最も近似する状態情報を有する目標情報を選択し、選択された目標情報の危険度を前記自車両の危険度とする、
請求項1〜6のいずれか一項に記載の運転評価装置。
【請求項8】
前記状態情報で示される車両の状態量、及び前記検出手段により検出される自車両の状態量が、速度及びヨー角速度のうちの少なくとも一つを含む、
請求項1〜7のいずれか一項に記載の運転評価装置。
【請求項9】
前記状態情報で示される車両の状態量、及び前記検出手段により検出される自車両の状態量が、アクセル操作量、ブレーキ操作量、及びステアリング操舵角度のうちの少なくとも一つを含む、
請求項1〜8のいずれか一項に記載の運転評価装置。
【請求項10】
前記推定手段により推定された自車両の危険度を記憶する危険度記憶手段を更に備え、
前記判定手段は、前記選択された一の目標情報の危険度と前記危険度記憶手段に記憶された複数の危険度に基づく統計値とに基づいて前記自車両の運転状況を判定する、
請求項1〜9のいずれか一項に記載の運転評価装置。
【請求項11】
前記危険度記憶手段は、交差点の通過形態、運転者の生理状態、天候、及び時間帯のうちの少なくとも一つを前記自車両の危険度と関連付けて記憶する、
請求項10に記載の運転評価装置。
【請求項12】
前記推定手段により推定された自車両の危険度を表示する表示手段を更に備える、
請求項1〜11のいずれか一項に記載の運転評価装置。
【請求項13】
前記表示手段は、前記推定手段により推定された自車両の危険度の履歴を時系列で表示する、
請求項12に記載の運転評価装置。
【請求項14】
前記目標情報が前記車両の状態量における移動効率を更に含み、
前記危険度に関する所定の基準値が危険度の閾値であり、
前記選択手段は、危険度が前記閾値以下である目標情報のうち移動効率が最大である目標情報を選択し、
前記基準値修正手段は、前記危険度の閾値と前記推定手段により推定された危険度との差に基づいて該閾値を修正する、
請求項1,3,4,7〜13のいずれか一項に記載の運転評価装置。
【請求項15】
前記目標情報が前記車両の状態量における移動効率を更に含み、
前記基準値は、第1の係数で重み付けされた危険度と第2の係数で重み付けされた移動効率との和で表され、
前記選択手段は、前記複数の目標情報から前記基準値が最大である目標情報を選択し、
前記基準値修正手段は前記第1の係数又は前記第2の係数を修正する、
請求項1,3,4,7〜13のいずれか一項に記載の運転評価装置。
【請求項16】
前記状態情報が前記車両の状態量における移動効率を更に含み、
前記基準値が、危険度を正規化した値をx、移動効率を正規化した値をyとして、a(1−x)及びbyのどちらか小さい方で表され、ここでa,bは所定の定数であり、
前記選択手段は、前記複数の目標情報から前記基準値が最大である目標情報を選択し、
前記基準値修正手段は前記定数a又はbを修正する、
請求項1,3,4,7〜13のいずれか一項に記載の運転評価装置。
【請求項1】
車両の状態量を示す状態情報と該状態量における危険度とを含む目標情報を複数記憶する目標記憶手段と、
前記危険度に関する所定の基準値に基づいて、前記目標記憶手段に記憶されている複数の目標情報から一の目標情報を選択する選択手段と、
自車両の状態量を検出する検出手段と、
前記検出手段により検出された自車両の状態量に基づいて該自車両の危険度を推定する推定手段と、
前記選択手段により選択された一の目標情報の危険度と前記推定手段により推定された危険度とを比較して前記自車両の運転状況を判定する判定手段と、
前記基準値と前記推定手段により推定された危険度とに基づいて該基準値を修正する基準値修正手段と、
を備える運転評価装置。
【請求項2】
車両の状態量を示す状態情報と該状態量における危険度とを含む目標情報を複数記憶する目標記憶手段と、
前記危険度に関する所定の基準値に基づいて、前記目標記憶手段に記憶されている複数の目標情報から一の目標情報を選択する選択手段と、
自車両の状態量を検出する検出手段と、
前記検出手段により検出された自車両の状態量に基づいて該自車両の危険度を推定する推定手段と、
前記選択手段により選択された一の目標情報の危険度と前記推定手段により推定された危険度との差分を危険度差として算出し、該危険度差と所定の差分閾値とを比較して前記自車両の運転状況を判定する判定手段と、
前記差分閾値と前記危険度差との差に基づいて該差分閾値を修正する差分閾値修正手段と、
を備える運転評価装置。
【請求項3】
前記基準値修正手段は、前記基準値が所定の最大値を超えないように該基準値を増加する、
請求項1に記載の運転評価装置。
【請求項4】
前記自車両の交差点の通過形態を推定する通過形態推定手段を更に備え、
前記基準値修正手段は、前記通過形態推定手段により推定された通過形態毎に前記基準値を修正する、
請求項1又は3に記載の運転評価装置。
【請求項5】
前記差分閾値修正手段は、前記差分閾値が所定の最大値を越えないように該差分閾値を増加する、
請求項2に記載の運転評価装置。
【請求項6】
前記自車両の交差点の通過形態を推定する通過形態推定手段を更に備え、
前記差分閾値修正手段は、前記通過形態推定手段により推定された通過形態毎に前記差分閾値を修正する、
請求項2又は5に記載の運転評価装置。
【請求項7】
前記推定手段は、前記目標記憶手段に記憶されている複数の目標情報から、前記検出手段により検出された自車両の状態量に最も近似する状態情報を有する目標情報を選択し、選択された目標情報の危険度を前記自車両の危険度とする、
請求項1〜6のいずれか一項に記載の運転評価装置。
【請求項8】
前記状態情報で示される車両の状態量、及び前記検出手段により検出される自車両の状態量が、速度及びヨー角速度のうちの少なくとも一つを含む、
請求項1〜7のいずれか一項に記載の運転評価装置。
【請求項9】
前記状態情報で示される車両の状態量、及び前記検出手段により検出される自車両の状態量が、アクセル操作量、ブレーキ操作量、及びステアリング操舵角度のうちの少なくとも一つを含む、
請求項1〜8のいずれか一項に記載の運転評価装置。
【請求項10】
前記推定手段により推定された自車両の危険度を記憶する危険度記憶手段を更に備え、
前記判定手段は、前記選択された一の目標情報の危険度と前記危険度記憶手段に記憶された複数の危険度に基づく統計値とに基づいて前記自車両の運転状況を判定する、
請求項1〜9のいずれか一項に記載の運転評価装置。
【請求項11】
前記危険度記憶手段は、交差点の通過形態、運転者の生理状態、天候、及び時間帯のうちの少なくとも一つを前記自車両の危険度と関連付けて記憶する、
請求項10に記載の運転評価装置。
【請求項12】
前記推定手段により推定された自車両の危険度を表示する表示手段を更に備える、
請求項1〜11のいずれか一項に記載の運転評価装置。
【請求項13】
前記表示手段は、前記推定手段により推定された自車両の危険度の履歴を時系列で表示する、
請求項12に記載の運転評価装置。
【請求項14】
前記目標情報が前記車両の状態量における移動効率を更に含み、
前記危険度に関する所定の基準値が危険度の閾値であり、
前記選択手段は、危険度が前記閾値以下である目標情報のうち移動効率が最大である目標情報を選択し、
前記基準値修正手段は、前記危険度の閾値と前記推定手段により推定された危険度との差に基づいて該閾値を修正する、
請求項1,3,4,7〜13のいずれか一項に記載の運転評価装置。
【請求項15】
前記目標情報が前記車両の状態量における移動効率を更に含み、
前記基準値は、第1の係数で重み付けされた危険度と第2の係数で重み付けされた移動効率との和で表され、
前記選択手段は、前記複数の目標情報から前記基準値が最大である目標情報を選択し、
前記基準値修正手段は前記第1の係数又は前記第2の係数を修正する、
請求項1,3,4,7〜13のいずれか一項に記載の運転評価装置。
【請求項16】
前記状態情報が前記車両の状態量における移動効率を更に含み、
前記基準値が、危険度を正規化した値をx、移動効率を正規化した値をyとして、a(1−x)及びbyのどちらか小さい方で表され、ここでa,bは所定の定数であり、
前記選択手段は、前記複数の目標情報から前記基準値が最大である目標情報を選択し、
前記基準値修正手段は前記定数a又はbを修正する、
請求項1,3,4,7〜13のいずれか一項に記載の運転評価装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2011−96086(P2011−96086A)
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願番号】特願2009−250784(P2009−250784)
【出願日】平成21年10月30日(2009.10.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願日】平成21年10月30日(2009.10.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]