
過渡時空燃比補正方法
【発明の詳細な説明】
【0001】
【産業上の利用分野】この発明は、電子制御燃料噴射式エンジンにおける過渡時空燃比補正方法に関する。
【0002】
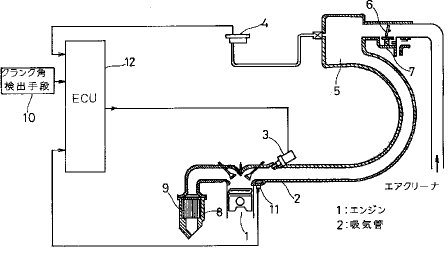
【従来の技術】図4は一般の電子制御燃料噴射式エンジンの概略図である。
【0003】図4において、1はエンジン、2は吸気管、3は吸気管2に設けられたインジェクタ、4は吸気管圧力に等しいサージタンク5の圧力を検出して検出信号を出力する圧力センサ、6はスロットルバルプ、7はエアバルブ、8はエグゾーストマニホールド、9はエグゾーストマニホールド8に収容された触媒、10は図示しないディストリビュータによる点火タイミングからクランク角を検出して検出信号を出力するクランク角検出手段、11は冷却水の水温を検出して検出信号を出力する水温センサ、12はECUである。
【0004】ところで、このような電子制御燃料噴射式エンジンでは、加減速時の応答性を良好にするために、吸気管圧力の変化量を検出し、この変化量に応じた補正係数に基づいて燃料を増量,減量する過渡時空燃比補正方法と呼ばれる補正が行われる。
【0005】そこで、ECU12に内蔵のメモリには、クランク角検出手段10が所定角度変化する間における吸気管圧力の変化量に対する補正係数FPの関係が予め求められて記憶され、更に水温センサ11による冷却水の水温に対する補正係数KTの関係も予め記憶され、クランク角検出手段10による検出クランク角が所定角度変化する間における圧力センサ4による検出圧力の変化量に応じた補正係数FPの値、及びそのときの冷却水の水温に対応した補正係数KTの値がメモリから読み出され、読み出された補正係数FPの値と補正係数KTの値との掛算から、加速増量補正係数FAA,減速減量補正係数FADが算出され、これら加速増量補正係数FAA,減速減量補正係数FADに基づき、ECU12によりインジェクタ3の有効噴射時間が算出され、算出された有効噴射時間に基づいてインジェクタ3の噴射時間が制御されて燃料噴射量が制御される。
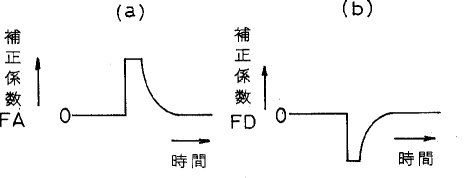
【0006】そして、加速増量の場合、通常図5(a)に示すように、補正係数を増大したのち所定の減衰率で減衰する補正が行われ、減速減量の場合、図5(b)に示すように、補正係数を減少したのち所定の回復率で回復する補正が行われる。
【0007】ところが、実際の運転においては、加速中に減速が行われたり、逆に減速中に加速が行われることがあり、この場合加速増量と減速減量とが重複する。
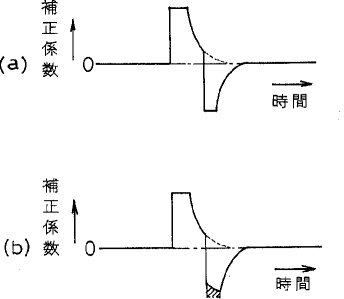
【0008】このように、加速増量と減速減量とが重複した場合の処理として特開昭58−150033号公報や特開昭58−150042号公報に記載の方法があり、前者は既に実行中の加速増量或いは減速減量を中止して、新たに実行要求のあった減速減量或いは加速増量を実行するというものであり、例えば加速増量の実行中に減速減量の実行要求があると、図6(a)に示すように、減速減量の要求があった時点で加速増量補正係数が補正途中で0になり、減速減量補正係数分による補正が行われることになる。
【0009】一方、後者は各々単独に求められた加速増量と減速減量の加算値に基づいて補正するというものであり、上記したように加速増量の実行中に減速減量の実行要求があった場合、図6(b)に示すように、減速減量への移行直後は、減速減量補正係数の大きさ(絶対値)が加速増量補正係数の加算によって本来値よりも小さくなる(図6(b)中のハッチング部分)。
【0010】
【発明が解決しようとする課題】しかし、上記した如く実行中の加速増量又は減速減量を中止して新たに要求のあった減速減量または加速増量を実行する場合、実行中の加速増量又は減速減量を中止するため、当初の加速増量又は減速減量の要求を満たすことができず、一方加速増量と減速減量の加算値に基づいて補正する場合には、加速増量中又は減速減量中に大きな減速減量又は加速増量の要求があると、新たに要求された減速減量又は加速増量が十分に行われないことがある。
【0011】そこでこの発明は、上記のような問題点を解消するためになされたもので、加速増量と減速減量とが重複しても、当初の加速増量又は減速減量の要求を満たし、新たな加速増量又は減速減量の要求にも十分応答できるようにすることを目的とする。
【0012】
【課題を解決するための手段】この発明に係る過渡時空燃比補正方法は、吸気管圧力の変化量に応じた補正係数に基づいて燃料を増量,減量する過渡時空燃比補正方法であって、加速時に補正係数を増大したのち減衰する加速増量と、減速時に補正係数を減少したのち回復する減速減量とを行う過渡時空燃比補正方法において、加速増量と減速減量とが重複した場合に、加速増量の補正係数の減衰率又は減速減量の補正係数の回復率を、減速又は加速の度合に応じて可変することを特徴としている。
【0013】
【作用】この発明においては、加速増量と減速減量の重複時に加速増量の補正係数の減衰率又は減速減量の補正係数の回復率を、減速又は加速の度合に応じて可変するため、当初の加速増量又は減速減量が従来のように途中で中止されずに十分にその要求が満たされ、加速増量中又は減速減量中に大きな減速減量又は加速増量の要求があると、加速増量又は減速減量の補正係数の減衰率又は回復率が大きくなる方向に可変され、大きな減速減量又は加速増量の要求に十分に応答することが可能になる。
【0014】
【実施例】図1及び図2はこの発明の過渡時空燃比補正方法の一実施例の動作説明図、図3はこの発明の原理説明図である。
【0015】まず、この発明の原理について説明する。
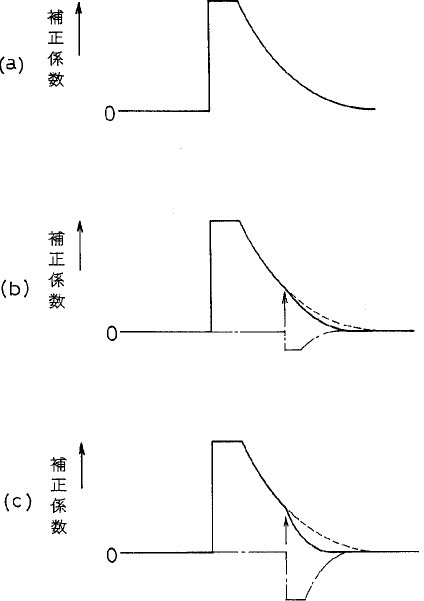
【0016】加速増量が行われる場合には、図3(a)に示すように、加速増量補正係数は急増したのち所定の減衰率で減衰し、このような加速増量補正係数に基づいて燃料噴射時間の補正が行われるが、加速増量の実行中に小さな減速減量の要求があると、減速減量補正係数に応じて実行中の加速増量補正係数の減衰率が可変され、加速増量補正係数の減衰率は減速減量の要求がない場合に比べて大きくなる。
【0017】ところで、要求される減速減量が小さいときには、図3(b)に示すように、減速減量の要求があった時点から加速増量補正係数の減衰率が可変され、図3R>3(b)中の破線に示す減速減量要求のない場合よりも大きな減衰率で加速増量補正係数が減衰し、一方、要求される減速減量が大きいときには、図3(c)に示すように、図3(b)に示す減速減量が小さい場合よりも更に大きな減衰率で加速増量補正係数が減衰するため、当初の加速増量の要求を満たしつつ、途中の大きな減速減量要求にも十分に応答することが可能になる。
【0018】つぎに、この発明の一実施例における一連の制御手順について図1を参照しつつ説明する。
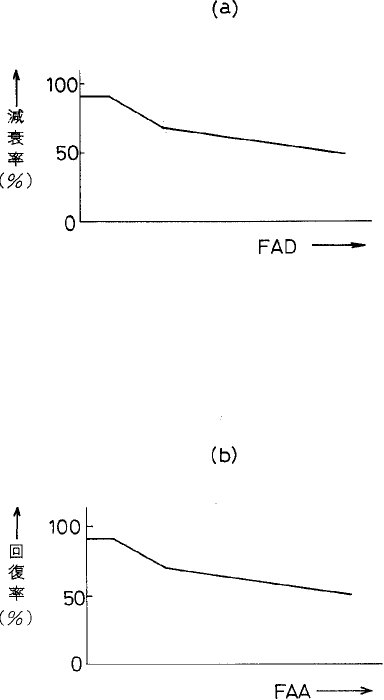
【0019】なお、この発明が適用されるシステムは図4R>4に示すものと同じであるため、重複した説明は避けるが、図4における説明と相違するのは、図2(a)に示すような減速減量補正係数の値に対する加速増量補正係数の減衰率の関係、及び図2(b)に示すような加速増量補正係数の値に対する減速減量補正係数の回復率の関係をECU12のメモリに記憶させていることである。
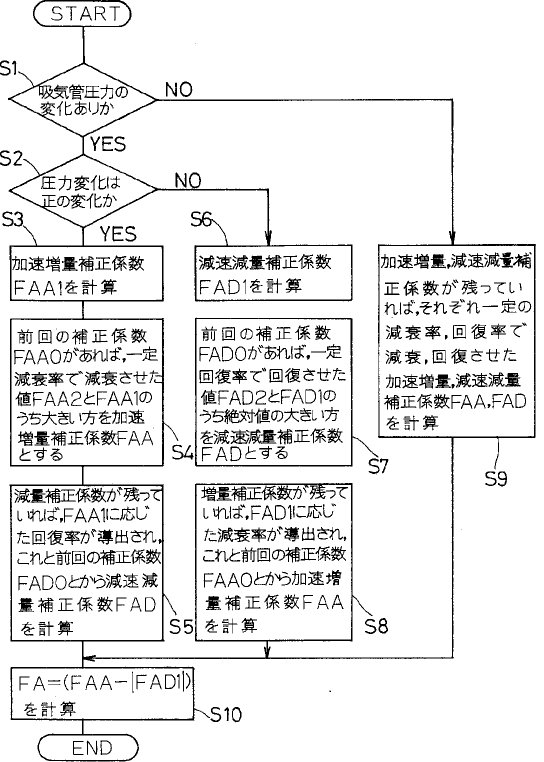
【0020】そして、図1に示すように、クランク角が所定角度変化する間に吸気管圧力が変化しているか否かの判定がなされ(ステップS1)、判定の結果がYESであれば、吸気管圧力の変化が正の変化であるか否かの判定がなされ(ステップS2)、この判定の結果がYESであれば、加速増量の計算処理が行われ、NOであれば減速減量の計算処理が行われる。
【0021】即ち、加速増量の計算処理の場合、まず吸気管圧力の変化量に応じた加速増量補正係数の値FAA1が計算され(ステップS3)、前回の加速増量補正係数があれば、その補正係数の値FAA0を一定の減衰率AAで減衰させた値FAA2とステップS3で計算した今回の値FAA1とが比較されて大きい方の値が採用され(ステップS4)、減速減量補正係数が残っているときには、ステップS3で求めた値FAA1に対する減速減量補正係数の回復率DBがメモリマップから導出され、この回復率DBと前回の減速減量補正係数の値FAD0との掛算によって減速減量補正係数FADが計算される(ステップS5)。
【0022】一方、減速減量の計算処理の場合、加速増量の場合と同様吸気管圧力の変化量に応じた減速減量補正係数の値FAD1が計算され(ステップS6)、前回の減速減量補正係数があれば、その補正係数の値FAD0を一定の回復率DAで回復させた値FAD2とステップS6で計算した今回の値FAD1とが比較されて絶対値の大きい方の値が採用され(ステップS7)、加速増量補正係数が残っているときには、ステップS6で求めた値FAD1に対する加速増量補正係数の減衰率ABがメモリマップから導出され、この減衰率ABと前回の加速増量補正係数の値FAA0との掛算によって加速増量補正係数FAAが計算される(ステップS8)。
【0023】ところで、ステップS1の判定の結果がNOであれば、特に新たな加速増量,減速減量の要求があったわけではないため、加速増量補正係数或いは減速減量補正係数が残っていれば、前回の加速増量補正係数の値FAA0,減速減量補正係数の値FAD0にそれぞれ一定の減衰率AA,回復率DAが掛算されて加速増量補正係数FAA或いは減速減量補正係数FADが計算される(ステップS9)。
【0024】そして、ステップS4,S5でそれぞれ得られた補正係数FAAとFAD、又はステップS7,S8で得られた補正係数FADとFAA、又はステップS9で得られた補正係数FAA,FADに基づき、(FAA−|FAD|)の計算により過渡時空燃比補正係数の値FAが得られ(ステップS10)、得られた値FAに基づいてインジェクタ3の有効噴射時間が算出されてインジェクタ3の噴射時間が制御され、燃料噴射量が制御され、一連の動作が終了し、クランク角が次に所定角度変化すると再び上記動作が繰り返し行われる。
【0025】こうして、例えば加速増量補正中に減速減量の要求があると、ステップS1,S2,S6,S7,S8,S10の処理により、現在実行中の加速増量の補正係数の減衰率が新たに要求された減速減量の大きさに応じて可変され、逆に減速減量補正中に加速増量の要求があると、ステップS1,S2,S3,S4,S5,S10の処理により現在実行中の減速減量の補正係数の回復率が新たに要求された加速増量の大きさに応じて可変され、従来のように当初の加速増量又は減速減量が途中で中止されることがない。
【0026】このとき、新たに要求された減速減量や加速増量が大きければ、加速増量補正係数の減衰率,減速減量補正係数の回復率が大きくなる方向に可変されるため、大きな減速減量,加速増量の要求に十分に応答できる。
【0027】従って、加速増量と減速減量とが重複した場合であっても、当初の加速増量又は減速減量が従来のように途中で中止されずに、十分に当初の補正要求を満たすことができ、しかも加速増量中又は減速減量中に大きな減速減量又は加速増量の要求があっても、加速増量の補正係数の減衰率又は減速減量補正係数の回復率が大きくなる方向に可変され、大きな減速減量又は加速増量の要求に十分に応答することが可能になる。
【0028】なお、マップとしてECUのメモリに記憶すべき減速減量補正係数,加速増量補正係数それぞれと加速増量補正係数の減衰率,減速減量補正係数の回復率との関係は、図2(a),(b)に示すものに限定されるものではない。
【0029】
【発明の効果】以上のように、この発明の過渡時空燃比補正方法によれば、加速増量と減速減量の重複時に加速増量の補正係数の減衰率又は減速減量の補正係数の回復率を、減速又は加速の度合に応じて可変するため、当初の加速増量又は減速減量が従来のように途中で中止されず十分に当初の要求を満たすことができ、補正中に大きな減速減量や加速増量の要求が新たにあっても、大きな減速減量,加速増量の要求に十分に応答することが可能になり、過渡時のエミッションやドライバビリティ等の向上を図ることができる。
【図面の簡単な説明】
【図1】この発明の過渡時空燃比補正方法の一実施例の動作説明用フローチャートである。
【図2】この発明の動作説明図である。
【図3】この発明の原理説明図である。
【図4】一般の電子制御燃料噴射式エンジンのシステム図である。
【図5】従来の過渡時空燃比補正方法の動作説明図である。
【図6】従来の過渡時空燃比補正方法の動作説明図である。
【符号の説明】
1 エンジン
2 吸気管
4 圧力センサ
12 ECU
【0001】
【産業上の利用分野】この発明は、電子制御燃料噴射式エンジンにおける過渡時空燃比補正方法に関する。
【0002】
【従来の技術】図4は一般の電子制御燃料噴射式エンジンの概略図である。
【0003】図4において、1はエンジン、2は吸気管、3は吸気管2に設けられたインジェクタ、4は吸気管圧力に等しいサージタンク5の圧力を検出して検出信号を出力する圧力センサ、6はスロットルバルプ、7はエアバルブ、8はエグゾーストマニホールド、9はエグゾーストマニホールド8に収容された触媒、10は図示しないディストリビュータによる点火タイミングからクランク角を検出して検出信号を出力するクランク角検出手段、11は冷却水の水温を検出して検出信号を出力する水温センサ、12はECUである。
【0004】ところで、このような電子制御燃料噴射式エンジンでは、加減速時の応答性を良好にするために、吸気管圧力の変化量を検出し、この変化量に応じた補正係数に基づいて燃料を増量,減量する過渡時空燃比補正方法と呼ばれる補正が行われる。
【0005】そこで、ECU12に内蔵のメモリには、クランク角検出手段10が所定角度変化する間における吸気管圧力の変化量に対する補正係数FPの関係が予め求められて記憶され、更に水温センサ11による冷却水の水温に対する補正係数KTの関係も予め記憶され、クランク角検出手段10による検出クランク角が所定角度変化する間における圧力センサ4による検出圧力の変化量に応じた補正係数FPの値、及びそのときの冷却水の水温に対応した補正係数KTの値がメモリから読み出され、読み出された補正係数FPの値と補正係数KTの値との掛算から、加速増量補正係数FAA,減速減量補正係数FADが算出され、これら加速増量補正係数FAA,減速減量補正係数FADに基づき、ECU12によりインジェクタ3の有効噴射時間が算出され、算出された有効噴射時間に基づいてインジェクタ3の噴射時間が制御されて燃料噴射量が制御される。
【0006】そして、加速増量の場合、通常図5(a)に示すように、補正係数を増大したのち所定の減衰率で減衰する補正が行われ、減速減量の場合、図5(b)に示すように、補正係数を減少したのち所定の回復率で回復する補正が行われる。
【0007】ところが、実際の運転においては、加速中に減速が行われたり、逆に減速中に加速が行われることがあり、この場合加速増量と減速減量とが重複する。
【0008】このように、加速増量と減速減量とが重複した場合の処理として特開昭58−150033号公報や特開昭58−150042号公報に記載の方法があり、前者は既に実行中の加速増量或いは減速減量を中止して、新たに実行要求のあった減速減量或いは加速増量を実行するというものであり、例えば加速増量の実行中に減速減量の実行要求があると、図6(a)に示すように、減速減量の要求があった時点で加速増量補正係数が補正途中で0になり、減速減量補正係数分による補正が行われることになる。
【0009】一方、後者は各々単独に求められた加速増量と減速減量の加算値に基づいて補正するというものであり、上記したように加速増量の実行中に減速減量の実行要求があった場合、図6(b)に示すように、減速減量への移行直後は、減速減量補正係数の大きさ(絶対値)が加速増量補正係数の加算によって本来値よりも小さくなる(図6(b)中のハッチング部分)。
【0010】
【発明が解決しようとする課題】しかし、上記した如く実行中の加速増量又は減速減量を中止して新たに要求のあった減速減量または加速増量を実行する場合、実行中の加速増量又は減速減量を中止するため、当初の加速増量又は減速減量の要求を満たすことができず、一方加速増量と減速減量の加算値に基づいて補正する場合には、加速増量中又は減速減量中に大きな減速減量又は加速増量の要求があると、新たに要求された減速減量又は加速増量が十分に行われないことがある。
【0011】そこでこの発明は、上記のような問題点を解消するためになされたもので、加速増量と減速減量とが重複しても、当初の加速増量又は減速減量の要求を満たし、新たな加速増量又は減速減量の要求にも十分応答できるようにすることを目的とする。
【0012】
【課題を解決するための手段】この発明に係る過渡時空燃比補正方法は、吸気管圧力の変化量に応じた補正係数に基づいて燃料を増量,減量する過渡時空燃比補正方法であって、加速時に補正係数を増大したのち減衰する加速増量と、減速時に補正係数を減少したのち回復する減速減量とを行う過渡時空燃比補正方法において、加速増量と減速減量とが重複した場合に、加速増量の補正係数の減衰率又は減速減量の補正係数の回復率を、減速又は加速の度合に応じて可変することを特徴としている。
【0013】
【作用】この発明においては、加速増量と減速減量の重複時に加速増量の補正係数の減衰率又は減速減量の補正係数の回復率を、減速又は加速の度合に応じて可変するため、当初の加速増量又は減速減量が従来のように途中で中止されずに十分にその要求が満たされ、加速増量中又は減速減量中に大きな減速減量又は加速増量の要求があると、加速増量又は減速減量の補正係数の減衰率又は回復率が大きくなる方向に可変され、大きな減速減量又は加速増量の要求に十分に応答することが可能になる。
【0014】
【実施例】図1及び図2はこの発明の過渡時空燃比補正方法の一実施例の動作説明図、図3はこの発明の原理説明図である。
【0015】まず、この発明の原理について説明する。
【0016】加速増量が行われる場合には、図3(a)に示すように、加速増量補正係数は急増したのち所定の減衰率で減衰し、このような加速増量補正係数に基づいて燃料噴射時間の補正が行われるが、加速増量の実行中に小さな減速減量の要求があると、減速減量補正係数に応じて実行中の加速増量補正係数の減衰率が可変され、加速増量補正係数の減衰率は減速減量の要求がない場合に比べて大きくなる。
【0017】ところで、要求される減速減量が小さいときには、図3(b)に示すように、減速減量の要求があった時点から加速増量補正係数の減衰率が可変され、図3R>3(b)中の破線に示す減速減量要求のない場合よりも大きな減衰率で加速増量補正係数が減衰し、一方、要求される減速減量が大きいときには、図3(c)に示すように、図3(b)に示す減速減量が小さい場合よりも更に大きな減衰率で加速増量補正係数が減衰するため、当初の加速増量の要求を満たしつつ、途中の大きな減速減量要求にも十分に応答することが可能になる。
【0018】つぎに、この発明の一実施例における一連の制御手順について図1を参照しつつ説明する。
【0019】なお、この発明が適用されるシステムは図4R>4に示すものと同じであるため、重複した説明は避けるが、図4における説明と相違するのは、図2(a)に示すような減速減量補正係数の値に対する加速増量補正係数の減衰率の関係、及び図2(b)に示すような加速増量補正係数の値に対する減速減量補正係数の回復率の関係をECU12のメモリに記憶させていることである。
【0020】そして、図1に示すように、クランク角が所定角度変化する間に吸気管圧力が変化しているか否かの判定がなされ(ステップS1)、判定の結果がYESであれば、吸気管圧力の変化が正の変化であるか否かの判定がなされ(ステップS2)、この判定の結果がYESであれば、加速増量の計算処理が行われ、NOであれば減速減量の計算処理が行われる。
【0021】即ち、加速増量の計算処理の場合、まず吸気管圧力の変化量に応じた加速増量補正係数の値FAA1が計算され(ステップS3)、前回の加速増量補正係数があれば、その補正係数の値FAA0を一定の減衰率AAで減衰させた値FAA2とステップS3で計算した今回の値FAA1とが比較されて大きい方の値が採用され(ステップS4)、減速減量補正係数が残っているときには、ステップS3で求めた値FAA1に対する減速減量補正係数の回復率DBがメモリマップから導出され、この回復率DBと前回の減速減量補正係数の値FAD0との掛算によって減速減量補正係数FADが計算される(ステップS5)。
【0022】一方、減速減量の計算処理の場合、加速増量の場合と同様吸気管圧力の変化量に応じた減速減量補正係数の値FAD1が計算され(ステップS6)、前回の減速減量補正係数があれば、その補正係数の値FAD0を一定の回復率DAで回復させた値FAD2とステップS6で計算した今回の値FAD1とが比較されて絶対値の大きい方の値が採用され(ステップS7)、加速増量補正係数が残っているときには、ステップS6で求めた値FAD1に対する加速増量補正係数の減衰率ABがメモリマップから導出され、この減衰率ABと前回の加速増量補正係数の値FAA0との掛算によって加速増量補正係数FAAが計算される(ステップS8)。
【0023】ところで、ステップS1の判定の結果がNOであれば、特に新たな加速増量,減速減量の要求があったわけではないため、加速増量補正係数或いは減速減量補正係数が残っていれば、前回の加速増量補正係数の値FAA0,減速減量補正係数の値FAD0にそれぞれ一定の減衰率AA,回復率DAが掛算されて加速増量補正係数FAA或いは減速減量補正係数FADが計算される(ステップS9)。
【0024】そして、ステップS4,S5でそれぞれ得られた補正係数FAAとFAD、又はステップS7,S8で得られた補正係数FADとFAA、又はステップS9で得られた補正係数FAA,FADに基づき、(FAA−|FAD|)の計算により過渡時空燃比補正係数の値FAが得られ(ステップS10)、得られた値FAに基づいてインジェクタ3の有効噴射時間が算出されてインジェクタ3の噴射時間が制御され、燃料噴射量が制御され、一連の動作が終了し、クランク角が次に所定角度変化すると再び上記動作が繰り返し行われる。
【0025】こうして、例えば加速増量補正中に減速減量の要求があると、ステップS1,S2,S6,S7,S8,S10の処理により、現在実行中の加速増量の補正係数の減衰率が新たに要求された減速減量の大きさに応じて可変され、逆に減速減量補正中に加速増量の要求があると、ステップS1,S2,S3,S4,S5,S10の処理により現在実行中の減速減量の補正係数の回復率が新たに要求された加速増量の大きさに応じて可変され、従来のように当初の加速増量又は減速減量が途中で中止されることがない。
【0026】このとき、新たに要求された減速減量や加速増量が大きければ、加速増量補正係数の減衰率,減速減量補正係数の回復率が大きくなる方向に可変されるため、大きな減速減量,加速増量の要求に十分に応答できる。
【0027】従って、加速増量と減速減量とが重複した場合であっても、当初の加速増量又は減速減量が従来のように途中で中止されずに、十分に当初の補正要求を満たすことができ、しかも加速増量中又は減速減量中に大きな減速減量又は加速増量の要求があっても、加速増量の補正係数の減衰率又は減速減量補正係数の回復率が大きくなる方向に可変され、大きな減速減量又は加速増量の要求に十分に応答することが可能になる。
【0028】なお、マップとしてECUのメモリに記憶すべき減速減量補正係数,加速増量補正係数それぞれと加速増量補正係数の減衰率,減速減量補正係数の回復率との関係は、図2(a),(b)に示すものに限定されるものではない。
【0029】
【発明の効果】以上のように、この発明の過渡時空燃比補正方法によれば、加速増量と減速減量の重複時に加速増量の補正係数の減衰率又は減速減量の補正係数の回復率を、減速又は加速の度合に応じて可変するため、当初の加速増量又は減速減量が従来のように途中で中止されず十分に当初の要求を満たすことができ、補正中に大きな減速減量や加速増量の要求が新たにあっても、大きな減速減量,加速増量の要求に十分に応答することが可能になり、過渡時のエミッションやドライバビリティ等の向上を図ることができる。
【図面の簡単な説明】
【図1】この発明の過渡時空燃比補正方法の一実施例の動作説明用フローチャートである。
【図2】この発明の動作説明図である。
【図3】この発明の原理説明図である。
【図4】一般の電子制御燃料噴射式エンジンのシステム図である。
【図5】従来の過渡時空燃比補正方法の動作説明図である。
【図6】従来の過渡時空燃比補正方法の動作説明図である。
【符号の説明】
1 エンジン
2 吸気管
4 圧力センサ
12 ECU
【特許請求の範囲】
【請求項1】 吸気管圧力の変化量に応じた補正係数に基づいて燃料を増量,減量する過渡時空燃比補正方法であって、加速時に補正係数を増大したのち減衰する加速増量と、減速時に補正係数を減少したのち回復する減速減量とを行う過渡時空燃比補正方法において、加速増量と減速減量とが重複した場合に、加速増量の補正係数の減衰率又は減速減量の補正係数の回復率を、減速又は加速の度合に応じて可変することを特徴とする過渡時空燃比補正方法。
【請求項1】 吸気管圧力の変化量に応じた補正係数に基づいて燃料を増量,減量する過渡時空燃比補正方法であって、加速時に補正係数を増大したのち減衰する加速増量と、減速時に補正係数を減少したのち回復する減速減量とを行う過渡時空燃比補正方法において、加速増量と減速減量とが重複した場合に、加速増量の補正係数の減衰率又は減速減量の補正係数の回復率を、減速又は加速の度合に応じて可変することを特徴とする過渡時空燃比補正方法。
【図4】


【図5】
【図1】
【図2】
【図3】
【図6】
【図5】
【図1】
【図2】
【図3】
【図6】
【特許番号】第2859009号
【登録日】平成10年(1998)12月4日
【発行日】平成11年(1999)2月17日
【国際特許分類】
【出願番号】特願平3−299823
【出願日】平成3年(1991)10月18日
【公開番号】特開平5−106483
【公開日】平成5年(1993)4月27日
【審査請求日】平成9年(1997)5月30日
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【参考文献】
【文献】特開 昭58−150033(JP,A)
【文献】特開 昭58−150042(JP,A)
【文献】特開 平3−264743(JP,A)
【文献】特開 昭58−150043(JP,A)
【文献】特開 昭58−144634(JP,A)
【登録日】平成10年(1998)12月4日
【発行日】平成11年(1999)2月17日
【国際特許分類】
【出願日】平成3年(1991)10月18日
【公開番号】特開平5−106483
【公開日】平成5年(1993)4月27日
【審査請求日】平成9年(1997)5月30日
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【参考文献】
【文献】特開 昭58−150033(JP,A)
【文献】特開 昭58−150042(JP,A)
【文献】特開 平3−264743(JP,A)
【文献】特開 昭58−150043(JP,A)
【文献】特開 昭58−144634(JP,A)
[ Back to top ]