
道のり推定装置及び方法及びプログラム
【課題】 大規模な記憶装置を必要とせず、高速に算出可能であって、しかも、都市内での現実的な移動実態を反映したより正確な道のりを算出する。
【解決手段】 本発明は、推定する道のりの2点を取得し、矩形単位に経路選択の自由度を表す交差点数または総道路距離を格納した記憶手段から該2点を対角線の2頂点とするような矩形に含まれるメッシュを取得し、2点を矩形とするメッシュを対象として、自由度の数値の和cと面積の和Sを求め、該面積の和Sが小さいほど、また、該自由度の数値の和cが大きいほど小さくなるパラメータpを算出し、入力された2点の座標とパラメータpを用いたLpノルムを用いて道のりを推定する。
【解決手段】 本発明は、推定する道のりの2点を取得し、矩形単位に経路選択の自由度を表す交差点数または総道路距離を格納した記憶手段から該2点を対角線の2頂点とするような矩形に含まれるメッシュを取得し、2点を矩形とするメッシュを対象として、自由度の数値の和cと面積の和Sを求め、該面積の和Sが小さいほど、また、該自由度の数値の和cが大きいほど小さくなるパラメータpを算出し、入力された2点の座標とパラメータpを用いたLpノルムを用いて道のりを推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道のり推定装置及び方法及びプログラムに係り、特に、都市内・都市間の指定された2点間の道のりを推定するための道のり推定装置及び方法及びプログラムに関する。
【背景技術】
【0002】
2点間の道のりを自動的に推定するための技術として、従来より、
1)カーナビゲーションシステムに見られるように、道路地図相当の情報を保持し、2点間を結ぶ様々な経路のうち最短のものを返す方法(例えば、特許文献1参照);
2)直線距離やマンハッタン距離を用いる方法;
という大きく2通りの方法が存在する。
【0003】
上記の1)の方法は、正確な道のりの算出を行うことができるため、カーナビゲーションのように正確さが要求される状況で用いられている。
【0004】
上記の2)の方法は、大きな記憶装置を必要とせず、より高速に算出を行えるため、道のりの算出を高頻度に行う必要がある状況、例えば、与えられた多数の地点の任意の2点間を結ぶ道のりを全て算出するような状況や、利用できる記憶資源が限られている状況などで用いられている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3076026号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、従来技術のうち、1)の方式によれば、膨大な地図データを必要とする上に、2点間での移動可能な各種経路の算出や、各経路を辿った場合の移動距離の算出を行う必要があった。すなわち、大規模な記憶装置が必要であるという課題と、計算のために必要な処理が大きいという問題があった。
【0007】
また、2)の方式によれば、都市内で現実的な移動実態を反映した正確な道のりの算出をすることができないという問題があった。
【0008】
本発明は、上記の点に鑑みなされたもので、大規模な記憶装置を必要とせず、高速に算出可能であって、しかも、都市内での現実的な移動実態を反映したより正確な道のりを算出することができるような道のり推定装置及び方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するため、本発明(請求項1)は、道のりを概算で推定するための道のり推定装置であって、
矩形単位に経路選択の自由度を表す交差点数または総道路距離を格納した記憶手段と、
推定する道のりの2点を取得し、該2点を対角線の2頂点とするような矩形に含まれるメッシュを前記記憶手段から取得するメッシュ取得手段と、
前記2点を矩形とするメッシュを対象として、自由度の数値の和cと面積の和Sを求め、該面積の和Sが小さいほど、また、該自由度の数値の和cが大きいほど小さくなるパラメータpを算出するパラメータ算出手段と、
入力された前記2点の座標と前記パラメータpを用いたLpノルムを用いて道のりを推定する推定手段と、を有する。
【0010】
また、本発明(請求項2)は、前記パラメータ算出手段において、
前記パラメータpを求める際に、
【0011】
【数1】

(但し、αは調整のためのパラメータ定数)
を用い、pの値が負となった場合はp=0とし、pの値が概ね1〜2の値となるように決定する手段を含む。
【0012】
また、本発明(請求項3)は、前記推定において、
前記道のりを求める際に、
【0013】
【数2】
(但し、βは事前に設定したパラメータ定数、x1,x2,y1,y2は前記入力された2点の座標)
を用い、2点が完全に一致であれば0、x座標とy座標のうち、いずれか1つが異なればβ、x座標、y座標ともに異なればβ×2であるとする手段を含む。
【発明の効果】
【0014】
本発明によれば、道のりの算出を直線距離ではなく、都市内での移動を反映した距離を用い、当該距離において、パラメータpを用いたLpノルムを用い、単位矩形内のメッシュ毎の交差点数を用いるため、大規模な記憶装置を必要とせずに、高速に、より正確な2点間の道のりの推定が可能となる。
【0015】
また、対象矩形内の総交差点数を取得した後には2つの数式のみであるので、高速に計算可能である。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施の形態における道のり推定装置の構成図である。
【図2】本発明の一実施の形態におけるメッシュ−交差点数データベースのデータ例である。
【図3】本発明の一実施の形態における概要動作のフローチャートである。
【発明を実施するための形態】
【0017】
以下図面と共に、本発明の実施の形態を説明する。
【0018】
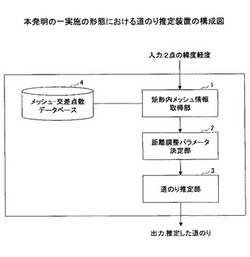
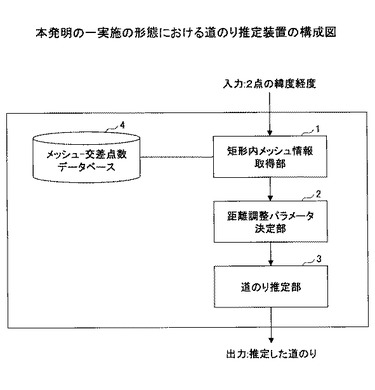
図1は、本発明の一実施の形態における道のり推定装置の構成を示す。
【0019】
同図に示す道のり推定装置は、矩形内メッシュ情報取得部1、距離調整パラメータ決定部2、道のり推定部3、メッシュ−交差点数データベース4から構成される。
【0020】
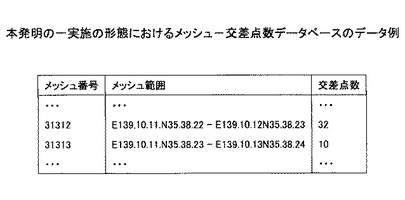
メッシュ−交差点数データベース4は、図2に示すように、各メッシュの番号、そのメッシュの範囲、そのメッシュ内に含まれる交差点の数長を記録したものであり、ハードディスク等の記憶媒体に設けられる。本装置が取り扱う緯度経度から一意にメッシュ番号を特定するように構成することも可能である。その場合は、メッシュ範囲を持たず、メッシュ番号と、交差点数だけで構成することも可能である。
【0021】
また、メッシュ−交差点数データベース4に格納する情報は、そのメッシュ範囲内で自由に移動のしやすさと相関にある情報であれば、必ずしも交差点数である必要はない。例えば、交差点数の代わりにメッシュ内での道路の総延長等を用いることも可能である。
【0022】
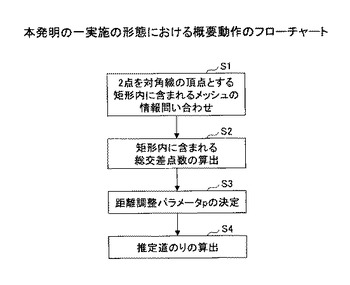
図3は、本発明の一実施の形態における概要動作のフローチャートである。
【0023】
ステップ1) 矩形内メッシュ情報取得部1は、装置に入力された2点の座標を入力として受け取り、この2点を対角線の2頂点とするような矩形に含まれる全てのメッシュの情報をメッシュ−交差点数データベース4に問い合わせる。
【0024】
ステップ2) 矩形メッシュ情報取得部1は、取得した矩形に含まれる全てのメッシュ情報について、メッシュ−交差点数データベース4を参照し、矩形内の総交差点数を得る。
【0025】
ステップ3) 距離調整パラメータ決定部2では、矩形内メッシュ情報取得部1で得られた総交差点数cと矩形の面積(すなわち、装置に入力された2点を対角線の2頂点とするような矩形の面積)Sを用いて、以下の式により非負の距離調整パラメータpを決定する。
【0026】
【数3】
もし、上記の式(1)により算出したpの値が負となった場合はp=0とする。ここで、αは調整のためのパラメータ定数であり、想定されるS,cにおいて、pの値が概ね1〜2の値となるように決定することが望ましい。このαの決定方法としては、例えば、標準的な都市において2点間を選択した場合に、本装置により算出した道のりと実際の道のりが一致するように調整することが可能である。
【0027】
ステップ4) 道のり推定部3では、装置へ入力された2点の座標(x1,y1),(x2,y2)と、距離調整パラメータ決定部2によって決定された距離調整パラメータpを用いて、以下の式(2)によって道のりを推定し、これを出力する。
【0028】
【数4】
ここで、βは事前に設定したパラメータ定数である。特に、p=0の場合は、2点間のx座標とy座標の値のうち、異なりの数とする。すなわち、2点が完全に一致であれば、0、x座標とy座標のうち、いずれか1つが異なればβ、x座標、y座標ともに異なれば、β×2である。
【0029】
上記のように本発明では、例えば、メッシュ−交差点数データベース4において、メッシュ範囲を持たない構成とした上で、総メッシュ数1万であるとき、交差点数を各10ビットで表現した場合は、10万ビットだけでよく、高速に2点間の道のりの推定が可能となる。
【0030】
なお、上記の図1の道のり推定装置の各構成要素の動作をプログラムとして構築し、道のり推定装置として利用されるコンピュータにインストールして実行させる、または、ネットワークを介して流通させることが可能である。
【0031】
本発明は、上記の実施の形態に限定されることなく、特許請求の範囲内において種々変更・応用が可能である。
【符号の説明】
【0032】
1 矩形内メッシュ情報取得部
2 距離調整パラメータ決定部
3 道のり推定部
4 メッシュ−交差点数データベース
【技術分野】
【0001】
本発明は、道のり推定装置及び方法及びプログラムに係り、特に、都市内・都市間の指定された2点間の道のりを推定するための道のり推定装置及び方法及びプログラムに関する。
【背景技術】
【0002】
2点間の道のりを自動的に推定するための技術として、従来より、
1)カーナビゲーションシステムに見られるように、道路地図相当の情報を保持し、2点間を結ぶ様々な経路のうち最短のものを返す方法(例えば、特許文献1参照);
2)直線距離やマンハッタン距離を用いる方法;
という大きく2通りの方法が存在する。
【0003】
上記の1)の方法は、正確な道のりの算出を行うことができるため、カーナビゲーションのように正確さが要求される状況で用いられている。
【0004】
上記の2)の方法は、大きな記憶装置を必要とせず、より高速に算出を行えるため、道のりの算出を高頻度に行う必要がある状況、例えば、与えられた多数の地点の任意の2点間を結ぶ道のりを全て算出するような状況や、利用できる記憶資源が限られている状況などで用いられている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3076026号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、従来技術のうち、1)の方式によれば、膨大な地図データを必要とする上に、2点間での移動可能な各種経路の算出や、各経路を辿った場合の移動距離の算出を行う必要があった。すなわち、大規模な記憶装置が必要であるという課題と、計算のために必要な処理が大きいという問題があった。
【0007】
また、2)の方式によれば、都市内で現実的な移動実態を反映した正確な道のりの算出をすることができないという問題があった。
【0008】
本発明は、上記の点に鑑みなされたもので、大規模な記憶装置を必要とせず、高速に算出可能であって、しかも、都市内での現実的な移動実態を反映したより正確な道のりを算出することができるような道のり推定装置及び方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するため、本発明(請求項1)は、道のりを概算で推定するための道のり推定装置であって、
矩形単位に経路選択の自由度を表す交差点数または総道路距離を格納した記憶手段と、
推定する道のりの2点を取得し、該2点を対角線の2頂点とするような矩形に含まれるメッシュを前記記憶手段から取得するメッシュ取得手段と、
前記2点を矩形とするメッシュを対象として、自由度の数値の和cと面積の和Sを求め、該面積の和Sが小さいほど、また、該自由度の数値の和cが大きいほど小さくなるパラメータpを算出するパラメータ算出手段と、
入力された前記2点の座標と前記パラメータpを用いたLpノルムを用いて道のりを推定する推定手段と、を有する。
【0010】
また、本発明(請求項2)は、前記パラメータ算出手段において、
前記パラメータpを求める際に、
【0011】
【数1】
(但し、αは調整のためのパラメータ定数)
を用い、pの値が負となった場合はp=0とし、pの値が概ね1〜2の値となるように決定する手段を含む。
【0012】
また、本発明(請求項3)は、前記推定において、
前記道のりを求める際に、
【0013】
【数2】
(但し、βは事前に設定したパラメータ定数、x1,x2,y1,y2は前記入力された2点の座標)
を用い、2点が完全に一致であれば0、x座標とy座標のうち、いずれか1つが異なればβ、x座標、y座標ともに異なればβ×2であるとする手段を含む。
【発明の効果】
【0014】
本発明によれば、道のりの算出を直線距離ではなく、都市内での移動を反映した距離を用い、当該距離において、パラメータpを用いたLpノルムを用い、単位矩形内のメッシュ毎の交差点数を用いるため、大規模な記憶装置を必要とせずに、高速に、より正確な2点間の道のりの推定が可能となる。
【0015】
また、対象矩形内の総交差点数を取得した後には2つの数式のみであるので、高速に計算可能である。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施の形態における道のり推定装置の構成図である。
【図2】本発明の一実施の形態におけるメッシュ−交差点数データベースのデータ例である。
【図3】本発明の一実施の形態における概要動作のフローチャートである。
【発明を実施するための形態】
【0017】
以下図面と共に、本発明の実施の形態を説明する。
【0018】
図1は、本発明の一実施の形態における道のり推定装置の構成を示す。
【0019】
同図に示す道のり推定装置は、矩形内メッシュ情報取得部1、距離調整パラメータ決定部2、道のり推定部3、メッシュ−交差点数データベース4から構成される。
【0020】
メッシュ−交差点数データベース4は、図2に示すように、各メッシュの番号、そのメッシュの範囲、そのメッシュ内に含まれる交差点の数長を記録したものであり、ハードディスク等の記憶媒体に設けられる。本装置が取り扱う緯度経度から一意にメッシュ番号を特定するように構成することも可能である。その場合は、メッシュ範囲を持たず、メッシュ番号と、交差点数だけで構成することも可能である。
【0021】
また、メッシュ−交差点数データベース4に格納する情報は、そのメッシュ範囲内で自由に移動のしやすさと相関にある情報であれば、必ずしも交差点数である必要はない。例えば、交差点数の代わりにメッシュ内での道路の総延長等を用いることも可能である。
【0022】
図3は、本発明の一実施の形態における概要動作のフローチャートである。
【0023】
ステップ1) 矩形内メッシュ情報取得部1は、装置に入力された2点の座標を入力として受け取り、この2点を対角線の2頂点とするような矩形に含まれる全てのメッシュの情報をメッシュ−交差点数データベース4に問い合わせる。
【0024】
ステップ2) 矩形メッシュ情報取得部1は、取得した矩形に含まれる全てのメッシュ情報について、メッシュ−交差点数データベース4を参照し、矩形内の総交差点数を得る。
【0025】
ステップ3) 距離調整パラメータ決定部2では、矩形内メッシュ情報取得部1で得られた総交差点数cと矩形の面積(すなわち、装置に入力された2点を対角線の2頂点とするような矩形の面積)Sを用いて、以下の式により非負の距離調整パラメータpを決定する。
【0026】
【数3】
もし、上記の式(1)により算出したpの値が負となった場合はp=0とする。ここで、αは調整のためのパラメータ定数であり、想定されるS,cにおいて、pの値が概ね1〜2の値となるように決定することが望ましい。このαの決定方法としては、例えば、標準的な都市において2点間を選択した場合に、本装置により算出した道のりと実際の道のりが一致するように調整することが可能である。
【0027】
ステップ4) 道のり推定部3では、装置へ入力された2点の座標(x1,y1),(x2,y2)と、距離調整パラメータ決定部2によって決定された距離調整パラメータpを用いて、以下の式(2)によって道のりを推定し、これを出力する。
【0028】
【数4】
ここで、βは事前に設定したパラメータ定数である。特に、p=0の場合は、2点間のx座標とy座標の値のうち、異なりの数とする。すなわち、2点が完全に一致であれば、0、x座標とy座標のうち、いずれか1つが異なればβ、x座標、y座標ともに異なれば、β×2である。
【0029】
上記のように本発明では、例えば、メッシュ−交差点数データベース4において、メッシュ範囲を持たない構成とした上で、総メッシュ数1万であるとき、交差点数を各10ビットで表現した場合は、10万ビットだけでよく、高速に2点間の道のりの推定が可能となる。
【0030】
なお、上記の図1の道のり推定装置の各構成要素の動作をプログラムとして構築し、道のり推定装置として利用されるコンピュータにインストールして実行させる、または、ネットワークを介して流通させることが可能である。
【0031】
本発明は、上記の実施の形態に限定されることなく、特許請求の範囲内において種々変更・応用が可能である。
【符号の説明】
【0032】
1 矩形内メッシュ情報取得部
2 距離調整パラメータ決定部
3 道のり推定部
4 メッシュ−交差点数データベース
【特許請求の範囲】
【請求項1】
道のりを概算で推定するための道のり推定装置であって、
矩形単位に経路選択の自由度を表す交差点数または総道路距離を格納した記憶手段と、
推定する道のりの2点を取得し、該2点を対角線の2頂点とするような矩形に含まれるメッシュを前記記憶手段から取得するメッシュ取得手段と、
前記2点を矩形とするメッシュを対象として、自由度の数値の和cと面積の和Sを求め、該面積の和Sが小さいほど、また、該自由度の数値の和cが大きいほど小さくなるパラメータpを算出するパラメータ算出手段と、
入力された前記2点の座標と前記パラメータpを用いたLpノルムを用いて道のりを推定する推定手段と、
を有することを特徴とする道のり推定装置。
【請求項2】
前記パラメータ算出手段は、
前記パラメータpを求める際に、
【数5】
(但し、αは調整のためのパラメータ定数)
を用い、pの値が負となった場合はp=0とし、pの値が概ね1〜2の値となるように決定する手段を含む
請求項1記載の道のり推定装置。
【請求項3】
前記推定手段は、
前記道のりを求める際に、
【数6】
(但し、βは事前に設定したパラメータ定数、x1,x2,y1,y2は前記入力された2点の座標)
を用い、2点が完全に一致であれば0、x座標とy座標のうち、いずれか1つが異なればβ、x座標、y座標ともに異なればβ×2であるとする手段を含む
請求項1記載の道のり推定装置。
【請求項4】
道のりを概算で推定するための道のり推定方法であって、
メッシュ取得手段が、推定する道のりの2点を取得し、矩形単位に経路選択の自由度を表す交差点数または総道路距離を格納した記憶手段から該2点を対角線の2頂点とするような矩形に含まれるメッシュを取得するメッシュ取得ステップと、
パラメータ算出手段が、前記2点を矩形とするメッシュを対象として、自由度の数値の和cと面積の和Sを求め、該面積の和Sが小さいほど、また、該自由度の数値の和cが大きいほど小さくなるパラメータpを算出するパラメータ算出ステップと、
推定手段が、入力された前記2点の座標と前記パラメータpを用いたLpノルムを用いて道のりを推定する推定ステップと、
を行うことを特徴とする道のり推定方法。
【請求項5】
前記パラメータ算出ステップにおいて、
前記パラメータpを求める際に、
【数7】
(但し、αは調整のためのパラメータ定数)
を用い、pの値が負となった場合はp=0とし、pの値が概ね1〜2の値となるように決定する
請求項4記載の道のり推定方法。
【請求項6】
前記推定ステップにおいて、
前記道のりを求める際に、
【数8】
(但し、βは事前に設定したパラメータ定数、x1,x2,y1,y2は前記入力された2点の座標)
を用い、2点が完全に一致であれば0、x座標とy座標のうち、いずれか1つが異なればβ、x座標、y座標ともに異なればβ×2であるとする
請求項4記載の道のり推定方法。
【請求項7】
コンピュータを、
請求項1乃至3のいずれか1項に記載の道のり推定装置の各手段として機能させる道のり推定プログラム。
【請求項1】
道のりを概算で推定するための道のり推定装置であって、
矩形単位に経路選択の自由度を表す交差点数または総道路距離を格納した記憶手段と、
推定する道のりの2点を取得し、該2点を対角線の2頂点とするような矩形に含まれるメッシュを前記記憶手段から取得するメッシュ取得手段と、
前記2点を矩形とするメッシュを対象として、自由度の数値の和cと面積の和Sを求め、該面積の和Sが小さいほど、また、該自由度の数値の和cが大きいほど小さくなるパラメータpを算出するパラメータ算出手段と、
入力された前記2点の座標と前記パラメータpを用いたLpノルムを用いて道のりを推定する推定手段と、
を有することを特徴とする道のり推定装置。
【請求項2】
前記パラメータ算出手段は、
前記パラメータpを求める際に、
【数5】
(但し、αは調整のためのパラメータ定数)
を用い、pの値が負となった場合はp=0とし、pの値が概ね1〜2の値となるように決定する手段を含む
請求項1記載の道のり推定装置。
【請求項3】
前記推定手段は、
前記道のりを求める際に、
【数6】
(但し、βは事前に設定したパラメータ定数、x1,x2,y1,y2は前記入力された2点の座標)
を用い、2点が完全に一致であれば0、x座標とy座標のうち、いずれか1つが異なればβ、x座標、y座標ともに異なればβ×2であるとする手段を含む
請求項1記載の道のり推定装置。
【請求項4】
道のりを概算で推定するための道のり推定方法であって、
メッシュ取得手段が、推定する道のりの2点を取得し、矩形単位に経路選択の自由度を表す交差点数または総道路距離を格納した記憶手段から該2点を対角線の2頂点とするような矩形に含まれるメッシュを取得するメッシュ取得ステップと、
パラメータ算出手段が、前記2点を矩形とするメッシュを対象として、自由度の数値の和cと面積の和Sを求め、該面積の和Sが小さいほど、また、該自由度の数値の和cが大きいほど小さくなるパラメータpを算出するパラメータ算出ステップと、
推定手段が、入力された前記2点の座標と前記パラメータpを用いたLpノルムを用いて道のりを推定する推定ステップと、
を行うことを特徴とする道のり推定方法。
【請求項5】
前記パラメータ算出ステップにおいて、
前記パラメータpを求める際に、
【数7】
(但し、αは調整のためのパラメータ定数)
を用い、pの値が負となった場合はp=0とし、pの値が概ね1〜2の値となるように決定する
請求項4記載の道のり推定方法。
【請求項6】
前記推定ステップにおいて、
前記道のりを求める際に、
【数8】
(但し、βは事前に設定したパラメータ定数、x1,x2,y1,y2は前記入力された2点の座標)
を用い、2点が完全に一致であれば0、x座標とy座標のうち、いずれか1つが異なればβ、x座標、y座標ともに異なればβ×2であるとする
請求項4記載の道のり推定方法。
【請求項7】
コンピュータを、
請求項1乃至3のいずれか1項に記載の道のり推定装置の各手段として機能させる道のり推定プログラム。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−92434(P2013−92434A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−234260(P2011−234260)
【出願日】平成23年10月25日(2011.10.25)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月25日(2011.10.25)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
[ Back to top ]