
道路ノード位置管理システム
【課題】道路情報から読み出される合流・退出ノードの位置と、実際に合流・退出走行が開始される地点との違いを補償する。
【解決手段】道路ノード位置管理システムは、車両の現在位置を表す車両位置情報を取得する車両位置情報取得部と、複数のリンク及びノードの接続関係により道路を表す道路情報を取得する道路情報取得部と、本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する前記車両の跨ぎ走行の検知時の車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として前記道路情報と関連付けて記憶する合流・退出ノード位置学習部とを備えている。
【解決手段】道路ノード位置管理システムは、車両の現在位置を表す車両位置情報を取得する車両位置情報取得部と、複数のリンク及びノードの接続関係により道路を表す道路情報を取得する道路情報取得部と、本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する前記車両の跨ぎ走行の検知時の車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として前記道路情報と関連付けて記憶する合流・退出ノード位置学習部とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路情報に含まれている道路ノードを管理する道路ノード位置管理システムに関する。この道路ノード位置管理システムは、目的地へ到達するための走行経路上に存在する本線道路と合流・退出道路との間の移行領域を基準点として、経路案内、マップマッチング、車両制御などの処理を行う車両用ナビゲーション装置に適用することができる。
【背景技術】
【0002】
例えば、特許文献1には、高速道路や幹線道路などの本線レーンから導入レーンを経て分岐路に至る導入レーン付き分岐点を有する特別区間での分岐路に対する走行案内を行う車両用ナビゲーションシステムが記載されている。このシステムでは、車両位置を検出する車両位置情報取得手段と、前記車両位置と設定された目的地とから案内経路を算定する案内経路算定手段と、本線から導入レーンを通じて分岐路へ分岐する導入レーン付き分岐点を有する特別区間を前記車両位置の前方の案内経路から検出する特別区間検出手段と、車両が本線から前記特別区間の導入レーンに移行したことを検知する導入レーン移行検知手段と、前記導入レーン付き分岐点に対する分岐案内を行うとともに、前記導入レーン移行検知手段が車両の導入レーンへの移行を検出したことに応答して、前記分岐路に対する走行案内を行う分岐案内手段とが備えられている。そのため、車両の現実の導入レーンへの移行を検知したことに応答して、その後に続く導入レーン付き分岐点を実際に通過する前に、分岐路の走行案内を行ことができるので、分岐路に対する正しい走行案内を十分な余裕をもって運転者に与えることができる。しかしながら、この技術では、導入レーン移行検知手段が車両の導入レーンへの移行を検出したということを基準点にして次にやるべき処理が行われるので、この次にやるべき処理は適切に行われるとしても、車両が導入レーンに移行する前に行われるべき処理のための開始基準としては役に立たない。
【0003】
また、交差点領域などでは交差点特有の標示線などが地物情報として存在しておりこれを利用して、車両位置を適切に補正する車両位置認識装置が特許文献2に記載されている。この装置では、車両の現在位置を表す車両位置情報を取得する車両位置情報取得手段と、道路情報を取得する道路情報取得手段と、取得された車両の周辺の画像情報に含まれる対象地物の画像認識処理を行う画像認識手段と、進路変更学習情報が記憶された進路変更学習情報記憶手段と、進路変更学習情報に基づいて前記車両位置情報を補正する車両位置補正手段とが備えられている。前記進路変更学習情報には、車両の過去の進路変更動作を学習して生成され、車両の進路変更動作が行われた交差点である進路変更交差点を特定可能な進路変更情報と、当該進路変更動作より前に画像認識された対象地物について当該対象地物の認識位置から車両の進路変更動作が行われた位置までの距離情報とが含まれている。具体的には、車両位置補正手段は、前記画像認識手段により前記対象地物が認識された場合に、当該対象地物についての前記進路変更学習情報に基づいて、前記車両位置情報に基づく当該対象地物の認識位置から前記距離情報に示される距離だけ進行した位置が、前記進路変更情報により特定される進路変更交差点の前記道路情報中の位置と一致するように前記車両位置情報を補正する。つまり、車両の過去の進路変更動作の検出結果と当該検出前の対象地物の画像認識結果とを学習した情報を用いて、車両位置情報を適切に補正することができる。しかしながら、この装置では、進路変更交差点での車両位置情報の補正は可能であるが、道路情報に含まれるノード位置は変わらない。このため、例えば、交差点での進路変更操作の開始タイミングなどが運転者によって異なっていても、同じタイミングで、その進路変更操作に付随する案内や制御が行われる。つまり、道路情報におけるノード位置が普遍的に正しいものとして利用されている。
【0004】
さらに、近接した交差点が存在する場合、道路情報から得られる交差点間の距離と実際の交差点間の距離との誤差により、適切な経路案内ができないという問題を解決するために道路情報から抽出された近接案内地点間の距離を算出し、算出した距離が所定距離以下の場合に、道路情報における近接案内地点間の距離を実際の近接案内地点間の距離に補正し、補正した距離を用いて案内情報を作成して誘導案内を行うナビゲーション装置が特許文献3に記載されている。この装置における補正は、道路情報から得られる交差点間の距離と実際の交差点間の距離との誤差をなくす補正であるので、事情に応じて異なる種々な走行軌跡で走行する各車両に対して適切な補正を行うことは困難である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−109340号公報(段落番号0005−0014、図1、図2)
【特許文献2】特開2009−8591号公報(段落番号0008−0029、図1)
【特許文献3】特開2008−286750号公報(段落番号0004−0015、図3)
【発明の概要】
【発明が解決しようとする課題】
【0006】
例えば、本線レーンと合流・退出レーンとの間の領域に設けられている合流・退出ノードが、この合流・退出走行のための案内制御やその後の制御の基準点として用いられる場合には、実際に合流・退出走行が開始される地点が道路情報における合流・退出ノードの位置より重要となる。このような合流・退出走行が開始される地点は、道路形状や運転者の運転傾向などによっても変化する。また、方位センサや距離センサなどから算出した走行軌跡を、道路情報によって示される道路形状(リンクとノードとで規定される)と比較して、最も合致する道路リンクとそのリンク上の位置を求めるマップマッチングにおいても、実際の走行軌跡と道路形状との関係が重要となる。
【0007】
そこで、道路情報から読み出される合流・退出ノードの位置と、実際に合流・退出走行が開始される地点との位置の差を補償できる技術が望まれる。
【課題を解決するための手段】
【0008】
本発明に係る道路ノード位置管理システムの特徴構成は、車両の現在位置を表す車両位置情報を取得する車両位置情報取得部と、複数のリンク及びノードの接続関係により道路を表す道路情報を取得する道路情報取得部と、本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する前記車両の跨ぎ走行を検知する識別線跨ぎ検知部と、前記跨ぎ走行の検知時の前記車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として前記道路情報と関連付けて記憶する合流・退出ノード位置学習部とを備えた点にある。
【0009】
この構成によれば、車両が本線レーンと合流・退出レーンとの間に設けられている区域識別線を跨いで走行したことが検知されると、その検知時の車両位置、つまり車両の走行軌跡と区域識別線との交点位置を求める。そして、この交点位置に基づいて、対応する合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードのより適切な位置を演算して導出する。この導出された位置は、実際の跨ぎ走行(本線レーンと合流・退出レーンとの間の合流走行又は退出走行)に適合する合流・退出ノードの位置である。従ってこの位置を学習ノード位置として道路情報と関連付けて記憶しておく。これにより、次回の走行時に当該合流・退出ノードが抽出されたときには、この学習ノード位置も読み出して、利用可能となる。従って、道路情報に含まれている合流・退出ノードの位置に代えて、学習ノード位置を利用することができ、過去の合流・退出のための走行軌跡に適合する位置を基準として経路案内やマップマッチングを行うことができる。
【0010】
好適な実施形態の1つでは、前記学習ノード位置を用いて、当該学習ノード位置が演算された前記本線レーンと前記合流・退出レーンとの接続部に対応する前記道路情報中のノード位置を補正するノード位置補正部をさらに備えている。この構成により、実際の合流走行又は退出走行に適合する合流・退出ノードの位置としての学習ノード位置を用いて、当該学習ノード位置に対応する前記道路情報中のノード位置を補正する。つまり、道路情報中における本線リンクと合流・退出リンクを接続している点である合流・退出ノードの位置を、前記本線レーンと前記合流・退出レーンとの間での実際の車両の合流・退出走行に基づいて得られた前記本線レーンと前記合流・退出レーンとの間での車両の移行地点、すなわち跨ぎ走行の検知時の前記車両位置に合わせて補正する。このような補正によって、より適切な経路案内やマップマッチングなどの処理が可能となる。
【0011】
学習ノード位置のより効果的な利用の1つとして、学習によって得られた学習ノード位置を、その学習時の本線レーン及び合流・退出レーンの道路形状と類似する本線レーン及び合流・退出レーンに対しても、その合流・退出ノードの位置と学習ノード位置との関係を移し変えることで、未走行の合流・退出ノードに対しても同様な学習ノード位置を適用することが挙げられる。そのような道路ノード位置管理システムの合流・退出ノード位置学習部は、前記学習ノード位置を、当該学習ノード位置に対応している本線レーン及び合流・退出レーンの道路形状に関連付けて記憶し、前記ノード位置補正部は、前記学習ノード位置と前記道路形状とに基づいて、当該学習ノード位置に対応する合流・退出ノードとは別の合流・退出ノードの位置を補正するように構成されている。これにより、まだ未走行の合流・退出ノードが出現しても、適切な経路案内やマップマッチングなどの処理が可能となる。
【0012】
実際の合流走行又は退出走行における走行軌跡は、その走行時の道路の混み具合によって大きな影響を受ける。言い換えると、道路の渋滞状況がその走行軌跡を決定する要因となる。このことから、本発明の好適な実施形態の1つでは、前記合流・退出ノード位置学習部は、前記学習ノード位置を当該学習ノード位置に対応している本線レーンまたは合流・退出レーンあるいはそれら両方のレーンの渋滞状況と関連付けて記憶するよう構成されている。これにより、渋滞状況に適合する合流・退出ノード位置が設定可能となる。
【0013】
本発明においては、跨ぎ走行の検知時の車両位置に基づいて、この跨ぎ走行に適合する合流・退出ノードの位置としての学習ノード位置が導出されるが、その具体例の1つは、その検知された跨ぎ走行の開始点となる位置を学習ノード位置とすることである。この開始点ではステアリング操作が行われるという観点から、本発明の好適な実施形態の1つでは、前記学習ノード位置は、前記識別線跨ぎ検知部によって検知された、対応する跨ぎ走行の起因となるステアリング操作開始地点に対応する位置として演算される。
【0014】
区域識別線に対する跨ぎ走行の検知は、道路面の撮影画像に区域識別線が含まれるかどうかを公知の画像認識技術で調べることにより可能である。ただし、その画像認識を効果的に行うためには、ステアリング操作履歴を参照すると好適である。例えば、ステアリング操作履歴から区域識別線が撮影画像に出現する可能性を推定することができるので、画像認識処理すべき撮影画像を絞り込むことができる。このためには、前記識別線跨ぎ検知部が、前記画像認識に加えて、ステアリング操作履歴を参照して前記跨ぎ走行の検知を行うように構成されるとよい。
【0015】
さらに、本発明は、道路情報から読み出される合流・退出ノードの位置と、実際に合流・退出走行が開始される地点との位置の差を補償するための道路ノード位置管理方法や道路ノード位置管理プログラムも権利対象としている。例えば、そのような道路ノード位置管理方法は、車両の現在位置を表す車両位置情報を取得するステップと、複数のリンク及びノードの接続関係により道路を表す道路情報を取得するステップと、本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する前記車両の跨ぎ走行を検知するステップと、前記跨ぎ走行の検知時の前記車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として前記道路情報と関連付けて記憶する合流・退出ノード位置学習ステップとを備えている。
また、そのような道路ノード位置管理プログラムは、車両の現在位置を表す車両位置情報を取得する機能と、複数のリンク及びノードの接続関係により道路を表す道路情報を取得する機能と、本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する前記車両の跨ぎ走行を検知する機能と、前記跨ぎ走行の検知時の前記車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として前記道路情報と関連付けて記憶する合流・退出ノード位置学習機能とをコンピュータに実行させる。当然ながら、このような道路ノード位置管理方法や道路ノード位置管理プログラムも上述した道路ノード位置管理システムで述べた作用効果を得ることができ、さらにその好適な実施形態として述べたいくつかの付加的技術を組み込むことも可能である。
【図面の簡単な説明】
【0016】
【図1】本発明による道路ノード位置管理システムの基本的な原理を模式的に示している説明図である。
【図2】本発明による道路ノード位置管理システムの基本的な原理における学習ノード位置演算アルゴリズムを模式的に示している説明図である。
【図3】本発明による道路ノード位置管理システムで取り扱われる道路情報の一例を模式化した模式図である。
【図4】本発明の1つの実施形態に係る車両用ナビゲーション装置の機能ブロック図である。
【図5】合流・退出ノード学習ルーチンの一例を示すフローチャートである。−チャートである。
【図6】跨ぎ検知ルーチンの一例を示すフローチャートである。−チャートである。
【図7】合流・退出ノード位置学習ルーチンの一例を示すフローチャートである。−チャートである。
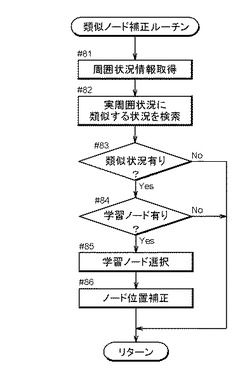
【図8】類似ノード補正ルーチンの一例を示すフローチャートである。−チャートである。
【発明を実施するための形態】
【0017】
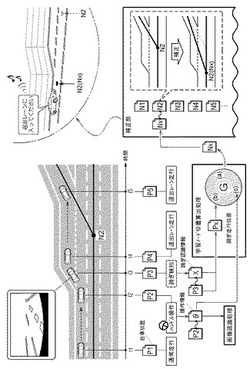
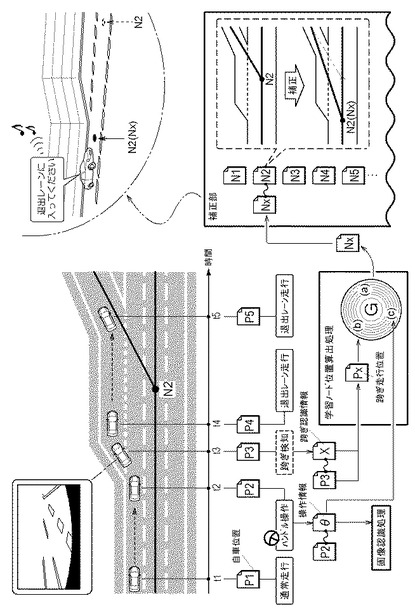
本発明による道路ノード位置管理システムの具体的な実施形態を説明する前に、その基本的な原理を、図1と図2とを用いて説明する。図1は、本発明による道路ノード位置管理システムの基本的な原理を模式的に示している説明図である。図2は、本発明による道路ノード位置管理システムで利用可能な学習ノード位置演算アルゴリズムの3つの例を図解している模式図である。
図1には、本線レーンと合流・退出レーンとの間で行われる合流・退出走行の一例として、高速道路や幹線道路などの本線から、退出レーンを通じて退出先の道路へ分岐する退出走行が示され、この退出走行において、本発明による道路ノード位置管理システムよって実行される種々の情報(データ)の流れが図解されている。
【0018】
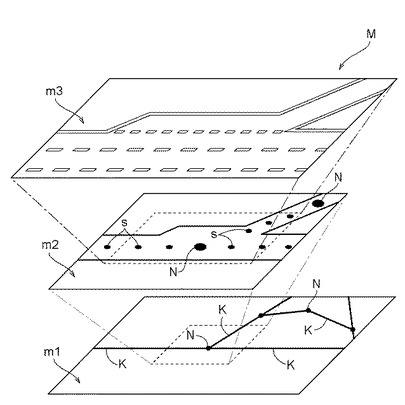
図3には、図1における道路領域の道路情報が模式的に表されており、通常、このような道路情報はデータベース化され、地図データベースに仕様に応じた形態で格納されている。ここでは、一例として、道路ネットワークレイヤm1、道路形状レイヤm2、道路属性レイヤm3の3つのレイヤに分けられて格納されている。
道路ネットワークレイヤm1は、道路間の接続情報を示すレイヤである。具体的には、緯度及び経度で表現された地図上の位置情報を有する多数のノードNの情報と、2つのノードNを接続して道路に対応する経路を構成する多数のリンクKの情報とを記録している。各リンクKは、そのリンク情報として、道路の種別(高速道路、有料道路、国道、県道等の種別)やリンク長さ等の情報を記録している。なお、分岐するリンクKと接続しているノードNは分岐ノードと呼ばれるが、この分岐ノードが車両の合流や退出の基準点となるので、ここでは合流・退出ノードとも呼ばれる。また、本線レーン(本線道路)を表すリンクである本線リンクに対して分岐ノードで接続しているリンクは、合流リンク又は退出リンクと呼ばれる。
【0019】
道路形状レイヤm2は、道路ネットワークレイヤm1に関連付けられて格納され、道路の形状などを示すレイヤである。具体的には、2つのノードNの間(リンクK上)に配置されてリンクKの詳細形状を表す形状補間点sの情報や、道路の詳細形状を表すための各形状補間点sでの道路幅の情報等を記録している。
道路属性レイヤm3は、道路ネットワークレイヤm1及び道路形状レイヤm2に関連付けられて構成され、道路に関する詳細な情報が記録されたレイヤである。この道路属性レイヤm3に記録される情報としては、例えば、分岐ノードに関する情報や各道路のレーン情報等が含まれる。ここで、レーン情報には、各道路のレーン数、各レーンのレーン幅、レーン長さなどの情報が含まれる。また、レーン情報には、分岐ノードで分岐して接続される複数の道路間での各レーンの位置関係や接続関係(リンク角度等)等の情報も含まれる。ここでは、道路情報は、上記各レイヤm1〜m3に格納された情報の総称であり、それに含まれるいずれの情報も意味するものである。
【0020】
図1には、本線レーンから退出レーンへ移行する退出走行経路としての、合流・退出ノード(以下の図1と図2とを用いた基本原理の説明では、単に退出ノードと称する)N2と、それに接続するリンクと、退出走行経路を走行する車両の車両軌跡とが図示されている。また、この退出走行を経時的に説明するために、時間経過を示す時点、t1からt5が設定されており、以下にその時点での状況を説明する。なお、図1と図2において退出ノードN2が黒点で示され、その退出ノードに接続している各リンクが太実線で示されている。
【0021】
(1)時点:t1
この時点:t1で示されている時間帯では、車両はまだ本線レーンを走行している。時点:t1は車両位置:P1が生成された時の時刻(タイムスタンプ)である。
(2)時点:t2
この時点:t2は本線レーンから退出レーンに移行するためにステアリング操作をして退出レーンに向かおうとしているときの時刻(タイムスタンプ)である。この時点:t2における車両位置:P2が取得されている。ステアリング操作はステアリング角度の変化で示されるが、この時点:t2で、所定のステアリング操作を示すステアリング角度:θが発生したとすると、このステアリング角度:θを含むステアリング操作情報が生成される。さらに、ステアリング操作履歴の一事象として、時点:t2における車両位置:P2と、ステアリング操作情報:θとが関連付けられる。このステアリング操作情報:θで表されるステアリング操作の検知をトリガーとして、本線レーンと退出レーンとの間の路面に描画されている区域識別線としての白色太破線の画像認識処理がスタートする。この画像認識処理は、車載カメラによる路面撮影画像に基づいて行われる。
【0022】
(3)時点:t3
この時点:t3では、車両が、本実施形態では白色太破線で道路面上に白色で描かれている区域識別線を跨ぎ走行する。車載カメラによる路面撮影画像に対する画像認識処理において区域識別線が認識され、このことを伝える跨ぎ認識情報:Xが発行される。この時点:t3を起動タイミングとして、以下の学習ノード位置算出処理がスタートする。
(3-1)
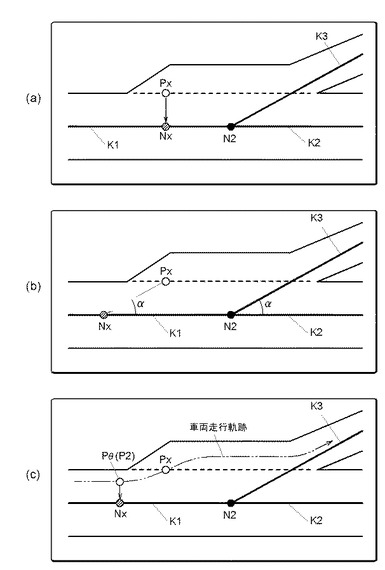
跨ぎ認識情報:Xが発行された時点:t3で取得された車両位置:P3が、区域識別線跨ぎ走行位置:Pxとみなされる。この跨ぎ走行位置を入力パラメータとして新たなノード位置である学習ノード位置が算定される。この算定アルゴリズム:Gとしては種々のものが考えられるが、本発明では特定のアルゴリズムに限定されない。ここでは図2で図解されている3つのアルゴリズムを取り上げて以下に説明する。
(a)跨ぎ走行が認識された跨ぎ走行位置:Pxから本線レーンのリンクK1に対して垂線を引いてその交点を学習ノード:Nxとする。
(b)跨ぎ走行位置:Pxからの直線が、本線レーンと退出レーンとがなす角度、つまりリンクK2とK3とのなす分岐リンク角度(単にリンク角とも呼ぶ):αでリンクK1と交わる点を学習ノード:Nxとする。
(c)本線レーンから退出レーンに移行するためにステアリング操作された車両位置:P2に最も近い本線レーンのリンク上の点を学習ノード:Nxとする。
(3-2)
算定された学習ノード:Nxの位置を退出ノード:N2の修正位置として、退出ノード:N2に関連付けて記憶する。算定アルゴリズムが異なるとしても算定された学習ノード:Nxの位置は、退出ノード:N2の位置より実際に退出走行を開始した位置に近いという可能性が高い。従って、次回走行時には、一旦記憶されたこの学習ノード:Nxを退出ノード:N2に代えて利用することにより、退出走行の前もっての案内のタイミングや退出走行後のマップマッチングの精度が向上する。
【0023】
(4)時点:t4
この時点:t4において、車両の退出レーンへの移行が完了しており、車両は退出レーンを走行している。
(5)時点:t5
この時点:t5において、車両が退出レーンに移行し、退出レーンに設定されているリンクに対するマップマッチングにより、車両位置が退出レーンの所定位置に設定される。
【0024】
〔学習ノード位置の利用〕
マップマッチングによって確定された走行予定経路に退出ノードN2が含まれていた場合、その退出ノードN2に学習ノードNxが関連付けられているかどうかチェックを行う。学習ノードNxが関連付けられていれば、その退出ノードN2の代わりに学習ノードNxの位置を利用して、経路案内処理やその後のマップマッチング処理を行う。
【0025】
この道路ノード位置管理システムの基本的な特徴は、車両の現在位置を表す車両位置情報と走行中の道路情報とを取得し、本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する車両の跨ぎ走行が検知された際の車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の位置が演算され、その演算結果を学習ノード位置として道路情報に関連付けて記憶されることである。
【0026】
ステアリング操作をして退出走行を開始するタイミングは、運転者の運転傾向によって大体決まっているが、状況によっては変化する。そのような変化の要因となる状況の種類として、例えば、本線レーン又は退出レーンの渋滞度、退出レーンの長さや幅、走行時間(夜又は昼)、天候などが挙げられる。従って、学習ノードの位置をそのような状況の種類ごとに記憶し、学習ノードの使用時には、状況に応じて使い分けると好適である。
【0027】
上記の原理説明では、退出走行を利用して退出ノードに対する学習ノードの算定を例としていたが、合流走行を利用して合流ノードに対する学習ノードの算定も同様な手順で行うことができる。従って、ここでは、退出ノードも合流モードも実質的に同一なものとみなして、退出・合流モードとして取り扱っている。
【0028】
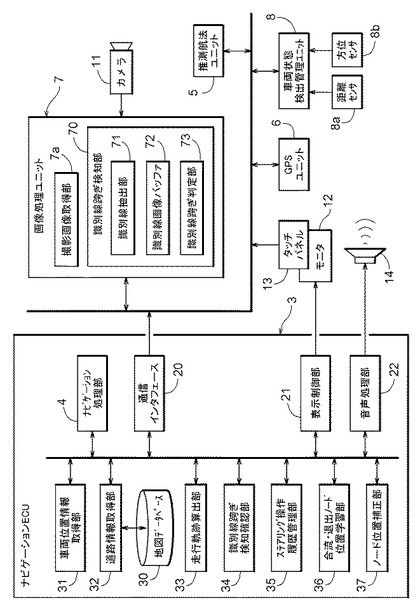
上述した基本原理に基づいて動作する道路ノード位置管理システムを採用した車両用ナビゲーション装置の一例を示す機能ブロック図が図4に示されている。このナビゲーション装置は、中核要素としてのナビゲーション電子制御ユニット(以下単にナビゲーションECUと略称する)3と、推測航法ユニット5、GPSユニット6と、画像処理ユニット7、車両状態検出管理ユニット8、車載カメラ11、タッチパネル13付きモニタ12、スピーカ14などから構築されている。
【0029】
推測航法ユニット5には、車両状態検出管理ユニット8を介して距離センサ8aと方位センサ8bからの信号が入力される。距離センサ8a及び方位センサ8bは、その検出信号を車両状態検出管理ユニット8を介して推測航法ユニット5に送る。推測航法ユニット5は、刻々と送られてくるこれらの移動距離に関する信号と方位に関する信号とに基づいて推測航法位置座標を演算し、推測航法による車両位置情報としてナビゲーションECU3に送る。
GPSユニット6にはGPS衛星からのGPS信号を受信するGPS測定ユニットが含まれている。GPSユニット6は、GPS測定ユニットで受信されたGPS衛星からの信号を解析し、車両の現在位置(緯度及び経度)を算定し、GPS位置座標に基づく車両位置情報としてナビゲーションECU3に送る。
【0030】
画像処理ユニット7は、撮影画像取得部7aと、識別線跨ぎ検知部70を備えている。
撮影画像取得部7aは、カメラ11により出力された撮影画像を取得し、歪み補正や濃度補正などの必要な前処理を行う。カメラ11は、レンズ光学系と撮像素子を備え、少なくとも車両の周辺の道路の区画線、例えば、車道中央線や車線境界線、あるいは本線レーンと合流・退出レーンとの間に設けられている区域識別線(本例では白色太破線)などを撮影可能な位置に設けられている。このようなカメラ11としては、例えば、車両に標準又はオプション装備されるバックカメラ等を用いると好適である。なお、撮影画像取得部7aは、カメラ11からの撮影画像を所定の時間間隔、例えば10〜50ms程度で取り込む。
【0031】
識別線跨ぎ検知部70は、ナビゲーションECU3からの指令により動作を開始し、車両が本線レーンから区域識別線を跨いで退出レーンに進入したことを検知する。この実施形態では、識別線跨ぎ検知部70は、カメラ11からの撮影画像の画像認識処理を通じて得られた区域識別線の認識に基づいて車両の識別線跨ぎを検知する。この目的のため識別線跨ぎ検知部70は、識別線抽出部71と、識別線画像バッファ72と、識別線跨ぎ判定部73を有する。識別線抽出部71は、撮影画像取得部7aから取り込まれた撮影画像に対して二値化処理やエッジ検出処理等を行い、当該撮影画像に含まれている区域識別線の輪郭を示す区画線画像を抽出する。識別線画像バッファ72は、生成された区画線画像を経時的な順序で一時的に格納する。識別線跨ぎ判定部73は、識別線画像バッファ72に経時的に格納された区画線画像を比較して、例えば区画線画像から動きベクトルを求めて、最終的に車両が区域識別線を跨いだことを判定する。車両の区域識別線跨ぎ走行が検知されると、識別線跨ぎ検知部70はナビゲーションECU3に識別線跨ぎ検知情報を送る。
【0032】
ナビゲーションECU3は、基本的なナビゲーション機能部として、地図データベース30と、車両位置情報取得部31と道路情報取得部32とナビゲーション処理部4を備えている。車両位置情報取得部31は、推測航法ユニット5やGPSユニット6から送られてくる車両位置情報から車両の現在位置を読み取る。道路情報取得部32は、車両位置情報取得部31で読み取られた車両の現在位置に基づいて、地図データベース30から必要な地図情報を含む道路情報を取得する。道路情報取得部32は、取得した道路情報を他のナビゲーションECU3の機能部に与える。また、道路情報取得部32は、ナビゲーション処理部4におけるナビゲーション処理の実行のために要求された領域の地図情報を地図データベース30から取得し、ナビゲーション処理部4に転送する。なお、この地図データベース30には、図3で模式的に示したように、道路ネットワークレイヤm1、道路形状レイヤm2、道路属性レイヤm3などのレイヤに分けられた形式のデータやリスト形式のデータで各種道路情報が格納されている。
【0033】
ナビゲーション処理部4は、車両位置表示、出発地から目的地までの経路探索、目的地までの進路案内、目的地検索等のナビゲーション機能を実行するためにインストールされているアプリケーションプログラムに従って動作する種々の演算処理機能部を有する。例えば、ナビゲーション処理ユニット4は、道路情報取得部32により取得された車両現在位置周辺の道路情報に含まれる地図イメージをモニタ12に表示するとともに、当該地図の画像上に、車両位置情報に基づいて車両位置マーク(シンボル)を重ね合わせて表示する処理を行う。さらには、ナビゲーション処理ユニット4は、公知の方法により計算された出発地から目的地までの案内経路と車両位置情報とに基づいて、モニタ12又はスピーカ14あるいはその両方を用いて分岐案内を含む進路案内を行う。さらには、ナビゲーション処理ユニット4は、車両位置情報取得部31から送られてきた車両位置が測定誤差等を含んでいるために道路上から外れた場合、車両位置を道路地図に示される道路上とする補正を行うマップマッチング機能部も備えている。マップマッチング処理を通じて補正され車両位置は、車両位置情報取得部31に与えられる。
【0034】
ナビゲーションECU3は、通信インタフェース20と、表示制御部21と、音声処理部22とを備えている。通信インタフェース20は、車載LANで接続された他のモジュールやECUとこのナビゲーションECU3とをデータ伝送可能に接続するものである。表示制御部21は、モニタ14における経路案内画像や撮影画像などの表示を制御する。音声処理部22は、経路案内情報などを音声化した音声信号を生成して、スピーカ14に出力する。
【0035】
さらに、このナビゲーションECU3は、上述した道路ノード位置管理システムを実現するために、走行軌跡算出部33と、識別線跨ぎ検知確認部34と、ステアリング操作履歴管理部35と、合流・退出ノード位置学習部36と、ノード位置補正部37とを備えている。走行軌跡算出部33は、要求された所定の開始タイミングからの車両の走行軌跡を、車両位置情報取得部31からの車両位置情報に基づいて算出して、一時的に記憶する。識別線跨ぎ検知確認部34は、上記識別線跨ぎ検知部70に対して、本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する車両の跨ぎ走行を検知する識別線跨ぎ走行検知処理を要請し、その結果に基づいて車両の識別線跨ぎ走行を確認する。また、識別線跨ぎ検知確認部34は、識別線跨ぎが発生した時点の車両位置情報を保持する。ステアリング操作履歴管理部35は、所定のタイミング、例えば、合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードが、車両の走行方向における前方に存在するときに、ステアリング操作履歴の記録を開始し、車両が合流または退出するためにステアリング操作する時点又は地点の把握を可能とする。
【0036】
合流・退出ノード位置学習部36は、識別線跨ぎ検知確認部34によって確認された跨ぎ走行の検知時の車両位置情報に基づいて、合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として道路情報、例えば元の合流・退出ノードと関連付けて記憶する。この修正位置の演算アルゴリズムとしては、図1と図2を用いた上記基礎原理の説明における(a)(b)(c)などを採用することができる。また、合流・退出ノード位置学習部36は、学習ノード位置を当該学習ノード位置に対応している本線レーンまたは合流・退出レーンあるいはそれら両方のレーンの渋滞状況と関連付けて記憶する機能も備えることが可能である。
【0037】
ノード位置補正部37、合流・退出ノード位置学習部36で求められた学習ノード位置を用いて、当該学習ノード位置が演算された前記本線レーンと前記合流・退出レーンとの接続部に対応する前記道路情報中のノード位置を補正する処理を行う。これにより、もともと地図データベース30に格納されていた道路情報における合流・退出ノード位置がこの学習ノード位置に合わせる補正が行われる。
【0038】
また、本線レーン及び合流・退出レーンの道路形状が実質的に同じであれば、運転者がその合流・退出走行時に同じような挙動を取ることが考えられる。このことから、この実施形態では、合流・退出ノード位置学習部36は、学習ノード位置を、学習ノード位置に対応している本線レーン及び合流・退出レーンの道路形状に関連付けて記憶しておき、ノード位置補正部37は、学習ノード位置と道路形状とに基づいて、当該学習ノード位置に対応する合流・退出ノードとは別の合流・退出ノードの位置を補正することも可能である。具体的には、道路形状が近似する場所の合流・退出ノードでは、車両の走行軌跡も近似するとみなして、そのような近似する合流・退出ノードにおいて既に記憶されている学習ノード位置を用いて他の合流・退出ノードの位置を補正する。その際に用いられる道路形状の近似判定条件パラメータとしては、区域識別線の長さ、本線レーンの道路幅、本線レーンのレーン数、合流・退出レーンの道路幅、本線レーンと合流・退出レーンとがなすリンク角度などである。本線レーンと合流・退出レーンとの接続区間が本願発明の接続部に相当する。ここでいう接続区間とは、本線レーンと合流・退出レーンとの間での車両のレーン移行が可能な区間であり、本線レーンと合流・退出レーンとが接している区間、より詳しくはこれらが互いに隣接して平行に延びている区間が接続区間となる。具体的には、図1及び図2に示すように、本線レーンと合流・退出レーンとの間の区域識別線が設けられている区間が接続区間となっている。
【0039】
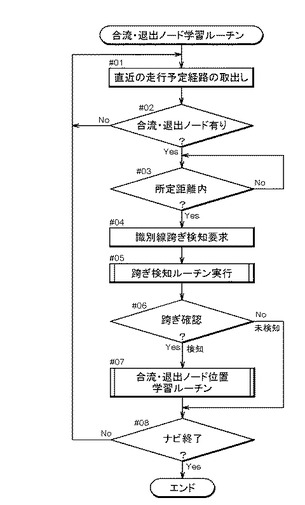
上述したように構成された道路ノード位置管理システムにおけるノード位置の学習管理の制御の流れを図5のフローチャートを用いて説明する。
タッチパネル13を通じて入力された目的地までの案内経路が算定され、走行が開始されると、その案内経路から走行にともなって順次取り出される直近の走行予定経路に対して、合流・退出ノード学習ルーチンが行われる。従って、まず、道路情報取得部32が直近の走行予定経路を取り出す(#01)。識別線跨ぎ検知確認部34が、取り出された走行予定経路に、合流レーンから本線レーンへの走行又は本線レーンから退出レーンへの走行が予定されている合流・退出ノードが含まれているかどうかをチェックする(#02)。そのような合流・退出ノードが含まれていなければ(#02No分岐)、次に新たな直近の走行予定経路が取り出されるのを待つ。そのような合流・退出ノードが含まれているならば(#02Yes分岐)、識別線跨ぎ検知確認部34は、さらにその合流・退出ノードが所定距離内に存在しているかどうかをチェックする(#03)。車両が合流・退出ノードから所定距離内に入るまで待機し、車両が合流・退出ノードから所定距離内に入ると(#03Yes分岐)、識別線跨ぎ検知確認部34は、画像処理ユニット7に識別線跨ぎ検知を要求する(#04)。画像処理ユニット7は識別線跨ぎ検知の要求を受けて、跨ぎ検知ルーチンを実行する(#05)。
【0040】
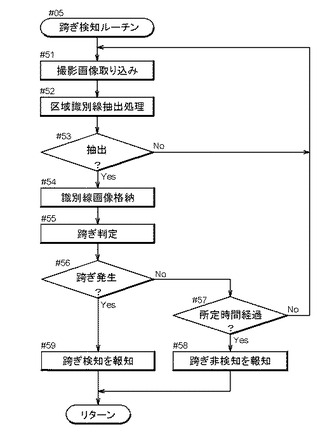
図6で示されている跨ぎ検知ルーチンが実行されると、撮影画像取得部7aが車載カメラ11の撮影画像を順次取り込み、必要な前処理を施してメモリに展開する(#51)。メモリに展開された撮影画像に対して識別線跨ぎ検知部70が以下のような跨ぎ検知処理を行う。まず、識別線抽出部71がエッジ検出フィルタなどを用いて本線レーンと合流・退出レーンとの間の太破線である区域識別線の抽出を行う(#52)。区域識別線が抽出されなかった場合(#53No分岐)、次の撮影画像に対する処理に進む。区域識別線が抽出された場合(#53Yes分岐)、抽出された区域識別線をマーキングするとともにこの識別線画像を識別線画像バッファ72に一時的に格納する(#54)。識別線跨ぎ判定部73は、識別線画像バッファ72に経時的な順序で格納されている識別線画像から車両が区域識別線を跨いだタイミングを判定する(#55)。車両の区域識別線跨ぎが判定されなければ(#56No分岐)、跨ぎ検知処理の経過時間がチェックされる(#57)。経過時間が所定時間内であれば(#57No分岐)、さらにこの跨ぎ検知処理を続行する。経過時間が所定時間を越えると(#57Yes分岐)、識別線跨ぎ検知部70は、「非検知」を内容とする跨ぎ検知情報をナビゲーションECU3に送り(#58)、このルーチンを終了する。ステップ#55で車両の区域識別線跨ぎが判定されると(#56Yes分岐)、識別線跨ぎ検知部70は、「検知」を内容とする跨ぎ検知情報をナビゲーションECU3に送り(#59)、このルーチンを終了する。
【0041】
跨ぎ検知ルーチンが終了すると、識別線跨ぎ検知確認部34が画像処理ユニット7から送られてきた跨ぎ検知情報から跨ぎ検知を確認する(#6)。識別線跨ぎが未検知であることが確認されると(#6No分岐)、ステップ#7の処理をジャンプしてステップ#8に移行する。識別線跨ぎが確認されると(#6Yes分岐)、識別線跨ぎが検知された時点の時刻(タイムスタンプ)、その時点の車両位置情報と、この合流・退出ノード学習処理の対象となっている合流・退出ノードの情報とを引数として合流・退出ノード位置学習部36による合流・退出ノード位置学習ルーチンに移行する(#7)。
【0042】
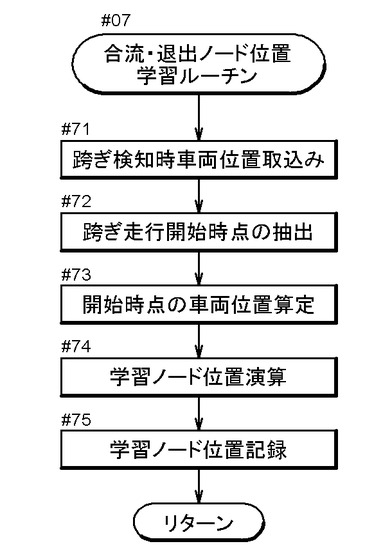
この合流・退出ノード位置学習ルーチンは図7に示され、その説明模式図が図2に示されている。なお、この実施形態では、図2を用いた基本原理の説明において例示された学習ノード位置算定アルゴリズムのうちの(c)、つまり本線レーンから退出レーンに移行するためにステアリング操作された車両位置に最も近い本線レーンのリンク上の点を学習ノードとする方法が採用されている。
まず、合流・退出ノード位置学習部36は、識別線跨ぎが検知された時点の車両位置情報を読み込む(#71)。さらに、合流・退出ノード位置学習部36は、ステアリング操作履歴管理部36が記録しているステアリング操作履歴から、識別線跨ぎが検知された時点を起点として遡り、識別線跨ぎ検知部70によって検知された、対応する跨ぎ走行の起因となるステアリング操作開始時点を抽出する(#72)。そして、合流・退出ノード位置学習部36は、抽出されたステアリング操作開始時点における車両位置を求める(#73)。次に、合流・退出ノード位置学習部36は、求められた車両位置であるステアリング操作開始地点に対応する道路情報におけるリンク上の位置を、学習ノード位置として演算する(#74)。ここではステアリング開始地点に最も近い本線レーンのリンク上の位置を学習モード位置とする。最後に、得られた学習ノード位置を、対応する合流・退出ノードに関連付けられた所定の学習ノード位置格納場所に記録して(#75)、このルーチンを終了する。
【0043】
ナビゲーションECU3により、合流・退出ノード位置学習ルーチンから戻ると、ナビゲーション処理の終了が指令されているかどうかチェックされ(#8)、終了が指令されていない限り(#8No分岐)、この合流・退出ノード学習ルーチンが繰り返され、終了が指令されると(#8Yes分岐)、ナビゲーション処理が終了する。
【0044】
上述した合流・退出ノード位置学習ルーチンを通じて生成され、記録された学習ノード位置は、ノード位置補正部37によって、当該学習ノード位置に関連付けられている合流・退出ノードの位置に代えて、利用できる。また、記録されている学習ノード位置の精度が所定レベルに達した場合には、地図データベース30における合流・退出ノードの位置を対応する学習ノード位置で書き換えることも可能である。
【0045】
さらには、合流・退出ノード位置学習ルーチンを通じて学習ノード位置が記録されていない合流・退出ノード位置であっても、当該合流・退出ノードの周囲状況が学習ノード位置を記録している合流・退出ノードの周囲状況と近似している場合には、その近似している合流・退出ノードの学習ノード位置を流用することも可能である。そのような処理のルーチンを図8のフローチャートを用いて説明する。なお、ここでは、合流・退出ノードがその合流・退出ノードに関する周囲状況情報に関連付けて記録された周囲状況・ノードテーブルが備えられているとする。
【0046】
まず、周囲状況情報が取得される(#81)。ここでの周囲状況情報とは、まずは道路形状であり、付加的には天候、時刻(明るさ)、道路渋滞度などである。道路形状に関する近似判定条件パラメータとしては、区域識別線の長さ、本線レーンの道路幅、本線レーンのレーン数、合流・退出レーンの道路幅、本線レーンと合流・退出レーンとがなすリンク角度などである。取得された周囲状況情報から走行予定の合流・退出ノードの周囲状況である実周囲状況に類似する周囲状況が記録されているかどうか周囲状況・ノードテーブルを検索する(#82)。検索結果がチェックされ(#83)、類似状況が存在する場合(#83Yes分岐)、さらにその類似状況に関連付けられた合流・退出ノードに学習ノード位置が関連付けられているかどうかチェックする(#84)。類似状況が存在しない場合(#83No分岐)、及び、合流・退出ノードに学習ノード位置が関連付けられていない場合(#84No分岐)、そのままこのルーチンを終了する。合流・退出ノードに学習ノード位置が関連付けられてる場合(#84Yes分岐)、より適切な学習ノード位置を選択する(#85)。そして、選択された学習ノード位置で走行予定の合流・退出ノードの位置を補正する(#86)。なお、ステップ#85での学習ノード選択において、学習ノード位置が1つだけの場合には、当該学習ノード位置と元の合流・退出ノードの位置とで適切な方が選択される。
【0047】
〔その他の実施形態〕
(1)上述した実施の形態では、車両が区域識別線を跨ぎ走行したことを検知する画像認識機能は画像処理ユニット7に備えられていたが、画像処理ユニット7は、画像認識の対象となる撮影画像の前処理だけを行い、実際の画像認識は、別のユニット、例えば、ナビゲーションECU3によって行うような構成を採用してもよい。
【0048】
(2)上述した実施の形態では、合流・退出ノード位置学習部36に、予め選択した学習ノード位置算出アルゴリズムを搭載する構成を採用していたが、複数の学習ノード位置算出アルゴリズムを用意しておいて、任意に選択できるようにしてもよい。
【0049】
(3)上述した実施の形態では、算出された学習ノード位置に基づく補正ノードは、対応する合流・退出ノードと関連付けて記憶されていた。しかしながら同じ合流・退出ノードであっても、道路状況や運転状況によって、合流ないしは退出のためにステアリング操作するタイミングは異なる可能性がある。したがって、同一合流・退出ノードであっても、そのような道路状況や運転状況が異なる毎に学習ノード位置を算定し、道路状況や運転状況別に、補正ノードを記憶してもよい。この構成では、学習ノード位置の利用時には、道路状況や運転状況に応じてより適切な補正ノードを用いることができる。このような学習ノード位置の利用は、当該学習ノード位置に対応する合流・退出ノードだけでなく、道路状況や運転状況が近似する他の合流・退出ノードに対しても行うことができる。
なお、道路状況としては、(1)本線レーンの渋滞度、(2) 合流・退出レーンの渋滞度、(3) 道路形状の一種としての区域識別線の長さ、つまり合流・退出レーンの長さ、(4) 道路形状の一種としての本線レーンや合流・退出レーンの道路幅、(5) 合流・退出が行われる時間帯、などが挙げられる。また、運転状況としては、(11)運転者の疲労度、(12) 合流・退出ノードに対する慣れ度(走行頻度)などが挙げられる。
【0050】
(4)上述した実施の形態では、車両が区域識別線を跨ぎ走行したことを検知するために車載カメラによる路面撮影画像に対する画像認識処理が採用されていた。しかしながら、悪天候時や夜間の走行を考慮して、跨ぎ検知の精度を高めるために、ステアリング操作履歴を参照して算定される走行軌跡から区域識別線の跨ぎ走行の検知を合わせて行い、画像認識の結果と照合するような技術を採用してもよい。
【0051】
(5)上述した実施の形態では、学習ノード位置を道路情報と関連付けるということを、道路情報に含まれている対応の合流・退出ノードに学習ノード位置を関連付けるということにしていたが、これに限定されるわけではなく、例えばリンクに関連付けてもよい。その他の道路情報に含まれているリンク、あるいは特定の地物やシンボルなどに関連付けられてもよい。
【産業上の利用可能性】
【0052】
本発明の道路ノード位置管理システムは、カーナビゲーションのみならず、道路情報に含まれているノードを基準として各種制御を実行するような技術分野に適用可能である。
【符号の説明】
【0053】
3:ナビゲーションECU
31:車両位置情報取得部
32:道路情報取得部
33:走行軌跡算出部
34:識別線跨ぎ検知確認部
35:ステアリング操作履歴管理部
36:合流・退出ノード位置学習部
37:ノード位置補正部
4:ナビゲーション処理部
5:推測航法ユニット
6:GPSユニット
7:画像処理ユニット
7a:撮影画像取得部
70:識別線跨ぎ検知部
71:識別線抽出部
72:識別線画像バッファ
73:識別線跨ぎ判定部
8:車両状態検出管理ユニット
【技術分野】
【0001】
本発明は、道路情報に含まれている道路ノードを管理する道路ノード位置管理システムに関する。この道路ノード位置管理システムは、目的地へ到達するための走行経路上に存在する本線道路と合流・退出道路との間の移行領域を基準点として、経路案内、マップマッチング、車両制御などの処理を行う車両用ナビゲーション装置に適用することができる。
【背景技術】
【0002】
例えば、特許文献1には、高速道路や幹線道路などの本線レーンから導入レーンを経て分岐路に至る導入レーン付き分岐点を有する特別区間での分岐路に対する走行案内を行う車両用ナビゲーションシステムが記載されている。このシステムでは、車両位置を検出する車両位置情報取得手段と、前記車両位置と設定された目的地とから案内経路を算定する案内経路算定手段と、本線から導入レーンを通じて分岐路へ分岐する導入レーン付き分岐点を有する特別区間を前記車両位置の前方の案内経路から検出する特別区間検出手段と、車両が本線から前記特別区間の導入レーンに移行したことを検知する導入レーン移行検知手段と、前記導入レーン付き分岐点に対する分岐案内を行うとともに、前記導入レーン移行検知手段が車両の導入レーンへの移行を検出したことに応答して、前記分岐路に対する走行案内を行う分岐案内手段とが備えられている。そのため、車両の現実の導入レーンへの移行を検知したことに応答して、その後に続く導入レーン付き分岐点を実際に通過する前に、分岐路の走行案内を行ことができるので、分岐路に対する正しい走行案内を十分な余裕をもって運転者に与えることができる。しかしながら、この技術では、導入レーン移行検知手段が車両の導入レーンへの移行を検出したということを基準点にして次にやるべき処理が行われるので、この次にやるべき処理は適切に行われるとしても、車両が導入レーンに移行する前に行われるべき処理のための開始基準としては役に立たない。
【0003】
また、交差点領域などでは交差点特有の標示線などが地物情報として存在しておりこれを利用して、車両位置を適切に補正する車両位置認識装置が特許文献2に記載されている。この装置では、車両の現在位置を表す車両位置情報を取得する車両位置情報取得手段と、道路情報を取得する道路情報取得手段と、取得された車両の周辺の画像情報に含まれる対象地物の画像認識処理を行う画像認識手段と、進路変更学習情報が記憶された進路変更学習情報記憶手段と、進路変更学習情報に基づいて前記車両位置情報を補正する車両位置補正手段とが備えられている。前記進路変更学習情報には、車両の過去の進路変更動作を学習して生成され、車両の進路変更動作が行われた交差点である進路変更交差点を特定可能な進路変更情報と、当該進路変更動作より前に画像認識された対象地物について当該対象地物の認識位置から車両の進路変更動作が行われた位置までの距離情報とが含まれている。具体的には、車両位置補正手段は、前記画像認識手段により前記対象地物が認識された場合に、当該対象地物についての前記進路変更学習情報に基づいて、前記車両位置情報に基づく当該対象地物の認識位置から前記距離情報に示される距離だけ進行した位置が、前記進路変更情報により特定される進路変更交差点の前記道路情報中の位置と一致するように前記車両位置情報を補正する。つまり、車両の過去の進路変更動作の検出結果と当該検出前の対象地物の画像認識結果とを学習した情報を用いて、車両位置情報を適切に補正することができる。しかしながら、この装置では、進路変更交差点での車両位置情報の補正は可能であるが、道路情報に含まれるノード位置は変わらない。このため、例えば、交差点での進路変更操作の開始タイミングなどが運転者によって異なっていても、同じタイミングで、その進路変更操作に付随する案内や制御が行われる。つまり、道路情報におけるノード位置が普遍的に正しいものとして利用されている。
【0004】
さらに、近接した交差点が存在する場合、道路情報から得られる交差点間の距離と実際の交差点間の距離との誤差により、適切な経路案内ができないという問題を解決するために道路情報から抽出された近接案内地点間の距離を算出し、算出した距離が所定距離以下の場合に、道路情報における近接案内地点間の距離を実際の近接案内地点間の距離に補正し、補正した距離を用いて案内情報を作成して誘導案内を行うナビゲーション装置が特許文献3に記載されている。この装置における補正は、道路情報から得られる交差点間の距離と実際の交差点間の距離との誤差をなくす補正であるので、事情に応じて異なる種々な走行軌跡で走行する各車両に対して適切な補正を行うことは困難である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−109340号公報(段落番号0005−0014、図1、図2)
【特許文献2】特開2009−8591号公報(段落番号0008−0029、図1)
【特許文献3】特開2008−286750号公報(段落番号0004−0015、図3)
【発明の概要】
【発明が解決しようとする課題】
【0006】
例えば、本線レーンと合流・退出レーンとの間の領域に設けられている合流・退出ノードが、この合流・退出走行のための案内制御やその後の制御の基準点として用いられる場合には、実際に合流・退出走行が開始される地点が道路情報における合流・退出ノードの位置より重要となる。このような合流・退出走行が開始される地点は、道路形状や運転者の運転傾向などによっても変化する。また、方位センサや距離センサなどから算出した走行軌跡を、道路情報によって示される道路形状(リンクとノードとで規定される)と比較して、最も合致する道路リンクとそのリンク上の位置を求めるマップマッチングにおいても、実際の走行軌跡と道路形状との関係が重要となる。
【0007】
そこで、道路情報から読み出される合流・退出ノードの位置と、実際に合流・退出走行が開始される地点との位置の差を補償できる技術が望まれる。
【課題を解決するための手段】
【0008】
本発明に係る道路ノード位置管理システムの特徴構成は、車両の現在位置を表す車両位置情報を取得する車両位置情報取得部と、複数のリンク及びノードの接続関係により道路を表す道路情報を取得する道路情報取得部と、本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する前記車両の跨ぎ走行を検知する識別線跨ぎ検知部と、前記跨ぎ走行の検知時の前記車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として前記道路情報と関連付けて記憶する合流・退出ノード位置学習部とを備えた点にある。
【0009】
この構成によれば、車両が本線レーンと合流・退出レーンとの間に設けられている区域識別線を跨いで走行したことが検知されると、その検知時の車両位置、つまり車両の走行軌跡と区域識別線との交点位置を求める。そして、この交点位置に基づいて、対応する合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードのより適切な位置を演算して導出する。この導出された位置は、実際の跨ぎ走行(本線レーンと合流・退出レーンとの間の合流走行又は退出走行)に適合する合流・退出ノードの位置である。従ってこの位置を学習ノード位置として道路情報と関連付けて記憶しておく。これにより、次回の走行時に当該合流・退出ノードが抽出されたときには、この学習ノード位置も読み出して、利用可能となる。従って、道路情報に含まれている合流・退出ノードの位置に代えて、学習ノード位置を利用することができ、過去の合流・退出のための走行軌跡に適合する位置を基準として経路案内やマップマッチングを行うことができる。
【0010】
好適な実施形態の1つでは、前記学習ノード位置を用いて、当該学習ノード位置が演算された前記本線レーンと前記合流・退出レーンとの接続部に対応する前記道路情報中のノード位置を補正するノード位置補正部をさらに備えている。この構成により、実際の合流走行又は退出走行に適合する合流・退出ノードの位置としての学習ノード位置を用いて、当該学習ノード位置に対応する前記道路情報中のノード位置を補正する。つまり、道路情報中における本線リンクと合流・退出リンクを接続している点である合流・退出ノードの位置を、前記本線レーンと前記合流・退出レーンとの間での実際の車両の合流・退出走行に基づいて得られた前記本線レーンと前記合流・退出レーンとの間での車両の移行地点、すなわち跨ぎ走行の検知時の前記車両位置に合わせて補正する。このような補正によって、より適切な経路案内やマップマッチングなどの処理が可能となる。
【0011】
学習ノード位置のより効果的な利用の1つとして、学習によって得られた学習ノード位置を、その学習時の本線レーン及び合流・退出レーンの道路形状と類似する本線レーン及び合流・退出レーンに対しても、その合流・退出ノードの位置と学習ノード位置との関係を移し変えることで、未走行の合流・退出ノードに対しても同様な学習ノード位置を適用することが挙げられる。そのような道路ノード位置管理システムの合流・退出ノード位置学習部は、前記学習ノード位置を、当該学習ノード位置に対応している本線レーン及び合流・退出レーンの道路形状に関連付けて記憶し、前記ノード位置補正部は、前記学習ノード位置と前記道路形状とに基づいて、当該学習ノード位置に対応する合流・退出ノードとは別の合流・退出ノードの位置を補正するように構成されている。これにより、まだ未走行の合流・退出ノードが出現しても、適切な経路案内やマップマッチングなどの処理が可能となる。
【0012】
実際の合流走行又は退出走行における走行軌跡は、その走行時の道路の混み具合によって大きな影響を受ける。言い換えると、道路の渋滞状況がその走行軌跡を決定する要因となる。このことから、本発明の好適な実施形態の1つでは、前記合流・退出ノード位置学習部は、前記学習ノード位置を当該学習ノード位置に対応している本線レーンまたは合流・退出レーンあるいはそれら両方のレーンの渋滞状況と関連付けて記憶するよう構成されている。これにより、渋滞状況に適合する合流・退出ノード位置が設定可能となる。
【0013】
本発明においては、跨ぎ走行の検知時の車両位置に基づいて、この跨ぎ走行に適合する合流・退出ノードの位置としての学習ノード位置が導出されるが、その具体例の1つは、その検知された跨ぎ走行の開始点となる位置を学習ノード位置とすることである。この開始点ではステアリング操作が行われるという観点から、本発明の好適な実施形態の1つでは、前記学習ノード位置は、前記識別線跨ぎ検知部によって検知された、対応する跨ぎ走行の起因となるステアリング操作開始地点に対応する位置として演算される。
【0014】
区域識別線に対する跨ぎ走行の検知は、道路面の撮影画像に区域識別線が含まれるかどうかを公知の画像認識技術で調べることにより可能である。ただし、その画像認識を効果的に行うためには、ステアリング操作履歴を参照すると好適である。例えば、ステアリング操作履歴から区域識別線が撮影画像に出現する可能性を推定することができるので、画像認識処理すべき撮影画像を絞り込むことができる。このためには、前記識別線跨ぎ検知部が、前記画像認識に加えて、ステアリング操作履歴を参照して前記跨ぎ走行の検知を行うように構成されるとよい。
【0015】
さらに、本発明は、道路情報から読み出される合流・退出ノードの位置と、実際に合流・退出走行が開始される地点との位置の差を補償するための道路ノード位置管理方法や道路ノード位置管理プログラムも権利対象としている。例えば、そのような道路ノード位置管理方法は、車両の現在位置を表す車両位置情報を取得するステップと、複数のリンク及びノードの接続関係により道路を表す道路情報を取得するステップと、本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する前記車両の跨ぎ走行を検知するステップと、前記跨ぎ走行の検知時の前記車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として前記道路情報と関連付けて記憶する合流・退出ノード位置学習ステップとを備えている。
また、そのような道路ノード位置管理プログラムは、車両の現在位置を表す車両位置情報を取得する機能と、複数のリンク及びノードの接続関係により道路を表す道路情報を取得する機能と、本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する前記車両の跨ぎ走行を検知する機能と、前記跨ぎ走行の検知時の前記車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として前記道路情報と関連付けて記憶する合流・退出ノード位置学習機能とをコンピュータに実行させる。当然ながら、このような道路ノード位置管理方法や道路ノード位置管理プログラムも上述した道路ノード位置管理システムで述べた作用効果を得ることができ、さらにその好適な実施形態として述べたいくつかの付加的技術を組み込むことも可能である。
【図面の簡単な説明】
【0016】
【図1】本発明による道路ノード位置管理システムの基本的な原理を模式的に示している説明図である。
【図2】本発明による道路ノード位置管理システムの基本的な原理における学習ノード位置演算アルゴリズムを模式的に示している説明図である。
【図3】本発明による道路ノード位置管理システムで取り扱われる道路情報の一例を模式化した模式図である。
【図4】本発明の1つの実施形態に係る車両用ナビゲーション装置の機能ブロック図である。
【図5】合流・退出ノード学習ルーチンの一例を示すフローチャートである。−チャートである。
【図6】跨ぎ検知ルーチンの一例を示すフローチャートである。−チャートである。
【図7】合流・退出ノード位置学習ルーチンの一例を示すフローチャートである。−チャートである。
【図8】類似ノード補正ルーチンの一例を示すフローチャートである。−チャートである。
【発明を実施するための形態】
【0017】
本発明による道路ノード位置管理システムの具体的な実施形態を説明する前に、その基本的な原理を、図1と図2とを用いて説明する。図1は、本発明による道路ノード位置管理システムの基本的な原理を模式的に示している説明図である。図2は、本発明による道路ノード位置管理システムで利用可能な学習ノード位置演算アルゴリズムの3つの例を図解している模式図である。
図1には、本線レーンと合流・退出レーンとの間で行われる合流・退出走行の一例として、高速道路や幹線道路などの本線から、退出レーンを通じて退出先の道路へ分岐する退出走行が示され、この退出走行において、本発明による道路ノード位置管理システムよって実行される種々の情報(データ)の流れが図解されている。
【0018】
図3には、図1における道路領域の道路情報が模式的に表されており、通常、このような道路情報はデータベース化され、地図データベースに仕様に応じた形態で格納されている。ここでは、一例として、道路ネットワークレイヤm1、道路形状レイヤm2、道路属性レイヤm3の3つのレイヤに分けられて格納されている。
道路ネットワークレイヤm1は、道路間の接続情報を示すレイヤである。具体的には、緯度及び経度で表現された地図上の位置情報を有する多数のノードNの情報と、2つのノードNを接続して道路に対応する経路を構成する多数のリンクKの情報とを記録している。各リンクKは、そのリンク情報として、道路の種別(高速道路、有料道路、国道、県道等の種別)やリンク長さ等の情報を記録している。なお、分岐するリンクKと接続しているノードNは分岐ノードと呼ばれるが、この分岐ノードが車両の合流や退出の基準点となるので、ここでは合流・退出ノードとも呼ばれる。また、本線レーン(本線道路)を表すリンクである本線リンクに対して分岐ノードで接続しているリンクは、合流リンク又は退出リンクと呼ばれる。
【0019】
道路形状レイヤm2は、道路ネットワークレイヤm1に関連付けられて格納され、道路の形状などを示すレイヤである。具体的には、2つのノードNの間(リンクK上)に配置されてリンクKの詳細形状を表す形状補間点sの情報や、道路の詳細形状を表すための各形状補間点sでの道路幅の情報等を記録している。
道路属性レイヤm3は、道路ネットワークレイヤm1及び道路形状レイヤm2に関連付けられて構成され、道路に関する詳細な情報が記録されたレイヤである。この道路属性レイヤm3に記録される情報としては、例えば、分岐ノードに関する情報や各道路のレーン情報等が含まれる。ここで、レーン情報には、各道路のレーン数、各レーンのレーン幅、レーン長さなどの情報が含まれる。また、レーン情報には、分岐ノードで分岐して接続される複数の道路間での各レーンの位置関係や接続関係(リンク角度等)等の情報も含まれる。ここでは、道路情報は、上記各レイヤm1〜m3に格納された情報の総称であり、それに含まれるいずれの情報も意味するものである。
【0020】
図1には、本線レーンから退出レーンへ移行する退出走行経路としての、合流・退出ノード(以下の図1と図2とを用いた基本原理の説明では、単に退出ノードと称する)N2と、それに接続するリンクと、退出走行経路を走行する車両の車両軌跡とが図示されている。また、この退出走行を経時的に説明するために、時間経過を示す時点、t1からt5が設定されており、以下にその時点での状況を説明する。なお、図1と図2において退出ノードN2が黒点で示され、その退出ノードに接続している各リンクが太実線で示されている。
【0021】
(1)時点:t1
この時点:t1で示されている時間帯では、車両はまだ本線レーンを走行している。時点:t1は車両位置:P1が生成された時の時刻(タイムスタンプ)である。
(2)時点:t2
この時点:t2は本線レーンから退出レーンに移行するためにステアリング操作をして退出レーンに向かおうとしているときの時刻(タイムスタンプ)である。この時点:t2における車両位置:P2が取得されている。ステアリング操作はステアリング角度の変化で示されるが、この時点:t2で、所定のステアリング操作を示すステアリング角度:θが発生したとすると、このステアリング角度:θを含むステアリング操作情報が生成される。さらに、ステアリング操作履歴の一事象として、時点:t2における車両位置:P2と、ステアリング操作情報:θとが関連付けられる。このステアリング操作情報:θで表されるステアリング操作の検知をトリガーとして、本線レーンと退出レーンとの間の路面に描画されている区域識別線としての白色太破線の画像認識処理がスタートする。この画像認識処理は、車載カメラによる路面撮影画像に基づいて行われる。
【0022】
(3)時点:t3
この時点:t3では、車両が、本実施形態では白色太破線で道路面上に白色で描かれている区域識別線を跨ぎ走行する。車載カメラによる路面撮影画像に対する画像認識処理において区域識別線が認識され、このことを伝える跨ぎ認識情報:Xが発行される。この時点:t3を起動タイミングとして、以下の学習ノード位置算出処理がスタートする。
(3-1)
跨ぎ認識情報:Xが発行された時点:t3で取得された車両位置:P3が、区域識別線跨ぎ走行位置:Pxとみなされる。この跨ぎ走行位置を入力パラメータとして新たなノード位置である学習ノード位置が算定される。この算定アルゴリズム:Gとしては種々のものが考えられるが、本発明では特定のアルゴリズムに限定されない。ここでは図2で図解されている3つのアルゴリズムを取り上げて以下に説明する。
(a)跨ぎ走行が認識された跨ぎ走行位置:Pxから本線レーンのリンクK1に対して垂線を引いてその交点を学習ノード:Nxとする。
(b)跨ぎ走行位置:Pxからの直線が、本線レーンと退出レーンとがなす角度、つまりリンクK2とK3とのなす分岐リンク角度(単にリンク角とも呼ぶ):αでリンクK1と交わる点を学習ノード:Nxとする。
(c)本線レーンから退出レーンに移行するためにステアリング操作された車両位置:P2に最も近い本線レーンのリンク上の点を学習ノード:Nxとする。
(3-2)
算定された学習ノード:Nxの位置を退出ノード:N2の修正位置として、退出ノード:N2に関連付けて記憶する。算定アルゴリズムが異なるとしても算定された学習ノード:Nxの位置は、退出ノード:N2の位置より実際に退出走行を開始した位置に近いという可能性が高い。従って、次回走行時には、一旦記憶されたこの学習ノード:Nxを退出ノード:N2に代えて利用することにより、退出走行の前もっての案内のタイミングや退出走行後のマップマッチングの精度が向上する。
【0023】
(4)時点:t4
この時点:t4において、車両の退出レーンへの移行が完了しており、車両は退出レーンを走行している。
(5)時点:t5
この時点:t5において、車両が退出レーンに移行し、退出レーンに設定されているリンクに対するマップマッチングにより、車両位置が退出レーンの所定位置に設定される。
【0024】
〔学習ノード位置の利用〕
マップマッチングによって確定された走行予定経路に退出ノードN2が含まれていた場合、その退出ノードN2に学習ノードNxが関連付けられているかどうかチェックを行う。学習ノードNxが関連付けられていれば、その退出ノードN2の代わりに学習ノードNxの位置を利用して、経路案内処理やその後のマップマッチング処理を行う。
【0025】
この道路ノード位置管理システムの基本的な特徴は、車両の現在位置を表す車両位置情報と走行中の道路情報とを取得し、本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する車両の跨ぎ走行が検知された際の車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の位置が演算され、その演算結果を学習ノード位置として道路情報に関連付けて記憶されることである。
【0026】
ステアリング操作をして退出走行を開始するタイミングは、運転者の運転傾向によって大体決まっているが、状況によっては変化する。そのような変化の要因となる状況の種類として、例えば、本線レーン又は退出レーンの渋滞度、退出レーンの長さや幅、走行時間(夜又は昼)、天候などが挙げられる。従って、学習ノードの位置をそのような状況の種類ごとに記憶し、学習ノードの使用時には、状況に応じて使い分けると好適である。
【0027】
上記の原理説明では、退出走行を利用して退出ノードに対する学習ノードの算定を例としていたが、合流走行を利用して合流ノードに対する学習ノードの算定も同様な手順で行うことができる。従って、ここでは、退出ノードも合流モードも実質的に同一なものとみなして、退出・合流モードとして取り扱っている。
【0028】
上述した基本原理に基づいて動作する道路ノード位置管理システムを採用した車両用ナビゲーション装置の一例を示す機能ブロック図が図4に示されている。このナビゲーション装置は、中核要素としてのナビゲーション電子制御ユニット(以下単にナビゲーションECUと略称する)3と、推測航法ユニット5、GPSユニット6と、画像処理ユニット7、車両状態検出管理ユニット8、車載カメラ11、タッチパネル13付きモニタ12、スピーカ14などから構築されている。
【0029】
推測航法ユニット5には、車両状態検出管理ユニット8を介して距離センサ8aと方位センサ8bからの信号が入力される。距離センサ8a及び方位センサ8bは、その検出信号を車両状態検出管理ユニット8を介して推測航法ユニット5に送る。推測航法ユニット5は、刻々と送られてくるこれらの移動距離に関する信号と方位に関する信号とに基づいて推測航法位置座標を演算し、推測航法による車両位置情報としてナビゲーションECU3に送る。
GPSユニット6にはGPS衛星からのGPS信号を受信するGPS測定ユニットが含まれている。GPSユニット6は、GPS測定ユニットで受信されたGPS衛星からの信号を解析し、車両の現在位置(緯度及び経度)を算定し、GPS位置座標に基づく車両位置情報としてナビゲーションECU3に送る。
【0030】
画像処理ユニット7は、撮影画像取得部7aと、識別線跨ぎ検知部70を備えている。
撮影画像取得部7aは、カメラ11により出力された撮影画像を取得し、歪み補正や濃度補正などの必要な前処理を行う。カメラ11は、レンズ光学系と撮像素子を備え、少なくとも車両の周辺の道路の区画線、例えば、車道中央線や車線境界線、あるいは本線レーンと合流・退出レーンとの間に設けられている区域識別線(本例では白色太破線)などを撮影可能な位置に設けられている。このようなカメラ11としては、例えば、車両に標準又はオプション装備されるバックカメラ等を用いると好適である。なお、撮影画像取得部7aは、カメラ11からの撮影画像を所定の時間間隔、例えば10〜50ms程度で取り込む。
【0031】
識別線跨ぎ検知部70は、ナビゲーションECU3からの指令により動作を開始し、車両が本線レーンから区域識別線を跨いで退出レーンに進入したことを検知する。この実施形態では、識別線跨ぎ検知部70は、カメラ11からの撮影画像の画像認識処理を通じて得られた区域識別線の認識に基づいて車両の識別線跨ぎを検知する。この目的のため識別線跨ぎ検知部70は、識別線抽出部71と、識別線画像バッファ72と、識別線跨ぎ判定部73を有する。識別線抽出部71は、撮影画像取得部7aから取り込まれた撮影画像に対して二値化処理やエッジ検出処理等を行い、当該撮影画像に含まれている区域識別線の輪郭を示す区画線画像を抽出する。識別線画像バッファ72は、生成された区画線画像を経時的な順序で一時的に格納する。識別線跨ぎ判定部73は、識別線画像バッファ72に経時的に格納された区画線画像を比較して、例えば区画線画像から動きベクトルを求めて、最終的に車両が区域識別線を跨いだことを判定する。車両の区域識別線跨ぎ走行が検知されると、識別線跨ぎ検知部70はナビゲーションECU3に識別線跨ぎ検知情報を送る。
【0032】
ナビゲーションECU3は、基本的なナビゲーション機能部として、地図データベース30と、車両位置情報取得部31と道路情報取得部32とナビゲーション処理部4を備えている。車両位置情報取得部31は、推測航法ユニット5やGPSユニット6から送られてくる車両位置情報から車両の現在位置を読み取る。道路情報取得部32は、車両位置情報取得部31で読み取られた車両の現在位置に基づいて、地図データベース30から必要な地図情報を含む道路情報を取得する。道路情報取得部32は、取得した道路情報を他のナビゲーションECU3の機能部に与える。また、道路情報取得部32は、ナビゲーション処理部4におけるナビゲーション処理の実行のために要求された領域の地図情報を地図データベース30から取得し、ナビゲーション処理部4に転送する。なお、この地図データベース30には、図3で模式的に示したように、道路ネットワークレイヤm1、道路形状レイヤm2、道路属性レイヤm3などのレイヤに分けられた形式のデータやリスト形式のデータで各種道路情報が格納されている。
【0033】
ナビゲーション処理部4は、車両位置表示、出発地から目的地までの経路探索、目的地までの進路案内、目的地検索等のナビゲーション機能を実行するためにインストールされているアプリケーションプログラムに従って動作する種々の演算処理機能部を有する。例えば、ナビゲーション処理ユニット4は、道路情報取得部32により取得された車両現在位置周辺の道路情報に含まれる地図イメージをモニタ12に表示するとともに、当該地図の画像上に、車両位置情報に基づいて車両位置マーク(シンボル)を重ね合わせて表示する処理を行う。さらには、ナビゲーション処理ユニット4は、公知の方法により計算された出発地から目的地までの案内経路と車両位置情報とに基づいて、モニタ12又はスピーカ14あるいはその両方を用いて分岐案内を含む進路案内を行う。さらには、ナビゲーション処理ユニット4は、車両位置情報取得部31から送られてきた車両位置が測定誤差等を含んでいるために道路上から外れた場合、車両位置を道路地図に示される道路上とする補正を行うマップマッチング機能部も備えている。マップマッチング処理を通じて補正され車両位置は、車両位置情報取得部31に与えられる。
【0034】
ナビゲーションECU3は、通信インタフェース20と、表示制御部21と、音声処理部22とを備えている。通信インタフェース20は、車載LANで接続された他のモジュールやECUとこのナビゲーションECU3とをデータ伝送可能に接続するものである。表示制御部21は、モニタ14における経路案内画像や撮影画像などの表示を制御する。音声処理部22は、経路案内情報などを音声化した音声信号を生成して、スピーカ14に出力する。
【0035】
さらに、このナビゲーションECU3は、上述した道路ノード位置管理システムを実現するために、走行軌跡算出部33と、識別線跨ぎ検知確認部34と、ステアリング操作履歴管理部35と、合流・退出ノード位置学習部36と、ノード位置補正部37とを備えている。走行軌跡算出部33は、要求された所定の開始タイミングからの車両の走行軌跡を、車両位置情報取得部31からの車両位置情報に基づいて算出して、一時的に記憶する。識別線跨ぎ検知確認部34は、上記識別線跨ぎ検知部70に対して、本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する車両の跨ぎ走行を検知する識別線跨ぎ走行検知処理を要請し、その結果に基づいて車両の識別線跨ぎ走行を確認する。また、識別線跨ぎ検知確認部34は、識別線跨ぎが発生した時点の車両位置情報を保持する。ステアリング操作履歴管理部35は、所定のタイミング、例えば、合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードが、車両の走行方向における前方に存在するときに、ステアリング操作履歴の記録を開始し、車両が合流または退出するためにステアリング操作する時点又は地点の把握を可能とする。
【0036】
合流・退出ノード位置学習部36は、識別線跨ぎ検知確認部34によって確認された跨ぎ走行の検知時の車両位置情報に基づいて、合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として道路情報、例えば元の合流・退出ノードと関連付けて記憶する。この修正位置の演算アルゴリズムとしては、図1と図2を用いた上記基礎原理の説明における(a)(b)(c)などを採用することができる。また、合流・退出ノード位置学習部36は、学習ノード位置を当該学習ノード位置に対応している本線レーンまたは合流・退出レーンあるいはそれら両方のレーンの渋滞状況と関連付けて記憶する機能も備えることが可能である。
【0037】
ノード位置補正部37、合流・退出ノード位置学習部36で求められた学習ノード位置を用いて、当該学習ノード位置が演算された前記本線レーンと前記合流・退出レーンとの接続部に対応する前記道路情報中のノード位置を補正する処理を行う。これにより、もともと地図データベース30に格納されていた道路情報における合流・退出ノード位置がこの学習ノード位置に合わせる補正が行われる。
【0038】
また、本線レーン及び合流・退出レーンの道路形状が実質的に同じであれば、運転者がその合流・退出走行時に同じような挙動を取ることが考えられる。このことから、この実施形態では、合流・退出ノード位置学習部36は、学習ノード位置を、学習ノード位置に対応している本線レーン及び合流・退出レーンの道路形状に関連付けて記憶しておき、ノード位置補正部37は、学習ノード位置と道路形状とに基づいて、当該学習ノード位置に対応する合流・退出ノードとは別の合流・退出ノードの位置を補正することも可能である。具体的には、道路形状が近似する場所の合流・退出ノードでは、車両の走行軌跡も近似するとみなして、そのような近似する合流・退出ノードにおいて既に記憶されている学習ノード位置を用いて他の合流・退出ノードの位置を補正する。その際に用いられる道路形状の近似判定条件パラメータとしては、区域識別線の長さ、本線レーンの道路幅、本線レーンのレーン数、合流・退出レーンの道路幅、本線レーンと合流・退出レーンとがなすリンク角度などである。本線レーンと合流・退出レーンとの接続区間が本願発明の接続部に相当する。ここでいう接続区間とは、本線レーンと合流・退出レーンとの間での車両のレーン移行が可能な区間であり、本線レーンと合流・退出レーンとが接している区間、より詳しくはこれらが互いに隣接して平行に延びている区間が接続区間となる。具体的には、図1及び図2に示すように、本線レーンと合流・退出レーンとの間の区域識別線が設けられている区間が接続区間となっている。
【0039】
上述したように構成された道路ノード位置管理システムにおけるノード位置の学習管理の制御の流れを図5のフローチャートを用いて説明する。
タッチパネル13を通じて入力された目的地までの案内経路が算定され、走行が開始されると、その案内経路から走行にともなって順次取り出される直近の走行予定経路に対して、合流・退出ノード学習ルーチンが行われる。従って、まず、道路情報取得部32が直近の走行予定経路を取り出す(#01)。識別線跨ぎ検知確認部34が、取り出された走行予定経路に、合流レーンから本線レーンへの走行又は本線レーンから退出レーンへの走行が予定されている合流・退出ノードが含まれているかどうかをチェックする(#02)。そのような合流・退出ノードが含まれていなければ(#02No分岐)、次に新たな直近の走行予定経路が取り出されるのを待つ。そのような合流・退出ノードが含まれているならば(#02Yes分岐)、識別線跨ぎ検知確認部34は、さらにその合流・退出ノードが所定距離内に存在しているかどうかをチェックする(#03)。車両が合流・退出ノードから所定距離内に入るまで待機し、車両が合流・退出ノードから所定距離内に入ると(#03Yes分岐)、識別線跨ぎ検知確認部34は、画像処理ユニット7に識別線跨ぎ検知を要求する(#04)。画像処理ユニット7は識別線跨ぎ検知の要求を受けて、跨ぎ検知ルーチンを実行する(#05)。
【0040】
図6で示されている跨ぎ検知ルーチンが実行されると、撮影画像取得部7aが車載カメラ11の撮影画像を順次取り込み、必要な前処理を施してメモリに展開する(#51)。メモリに展開された撮影画像に対して識別線跨ぎ検知部70が以下のような跨ぎ検知処理を行う。まず、識別線抽出部71がエッジ検出フィルタなどを用いて本線レーンと合流・退出レーンとの間の太破線である区域識別線の抽出を行う(#52)。区域識別線が抽出されなかった場合(#53No分岐)、次の撮影画像に対する処理に進む。区域識別線が抽出された場合(#53Yes分岐)、抽出された区域識別線をマーキングするとともにこの識別線画像を識別線画像バッファ72に一時的に格納する(#54)。識別線跨ぎ判定部73は、識別線画像バッファ72に経時的な順序で格納されている識別線画像から車両が区域識別線を跨いだタイミングを判定する(#55)。車両の区域識別線跨ぎが判定されなければ(#56No分岐)、跨ぎ検知処理の経過時間がチェックされる(#57)。経過時間が所定時間内であれば(#57No分岐)、さらにこの跨ぎ検知処理を続行する。経過時間が所定時間を越えると(#57Yes分岐)、識別線跨ぎ検知部70は、「非検知」を内容とする跨ぎ検知情報をナビゲーションECU3に送り(#58)、このルーチンを終了する。ステップ#55で車両の区域識別線跨ぎが判定されると(#56Yes分岐)、識別線跨ぎ検知部70は、「検知」を内容とする跨ぎ検知情報をナビゲーションECU3に送り(#59)、このルーチンを終了する。
【0041】
跨ぎ検知ルーチンが終了すると、識別線跨ぎ検知確認部34が画像処理ユニット7から送られてきた跨ぎ検知情報から跨ぎ検知を確認する(#6)。識別線跨ぎが未検知であることが確認されると(#6No分岐)、ステップ#7の処理をジャンプしてステップ#8に移行する。識別線跨ぎが確認されると(#6Yes分岐)、識別線跨ぎが検知された時点の時刻(タイムスタンプ)、その時点の車両位置情報と、この合流・退出ノード学習処理の対象となっている合流・退出ノードの情報とを引数として合流・退出ノード位置学習部36による合流・退出ノード位置学習ルーチンに移行する(#7)。
【0042】
この合流・退出ノード位置学習ルーチンは図7に示され、その説明模式図が図2に示されている。なお、この実施形態では、図2を用いた基本原理の説明において例示された学習ノード位置算定アルゴリズムのうちの(c)、つまり本線レーンから退出レーンに移行するためにステアリング操作された車両位置に最も近い本線レーンのリンク上の点を学習ノードとする方法が採用されている。
まず、合流・退出ノード位置学習部36は、識別線跨ぎが検知された時点の車両位置情報を読み込む(#71)。さらに、合流・退出ノード位置学習部36は、ステアリング操作履歴管理部36が記録しているステアリング操作履歴から、識別線跨ぎが検知された時点を起点として遡り、識別線跨ぎ検知部70によって検知された、対応する跨ぎ走行の起因となるステアリング操作開始時点を抽出する(#72)。そして、合流・退出ノード位置学習部36は、抽出されたステアリング操作開始時点における車両位置を求める(#73)。次に、合流・退出ノード位置学習部36は、求められた車両位置であるステアリング操作開始地点に対応する道路情報におけるリンク上の位置を、学習ノード位置として演算する(#74)。ここではステアリング開始地点に最も近い本線レーンのリンク上の位置を学習モード位置とする。最後に、得られた学習ノード位置を、対応する合流・退出ノードに関連付けられた所定の学習ノード位置格納場所に記録して(#75)、このルーチンを終了する。
【0043】
ナビゲーションECU3により、合流・退出ノード位置学習ルーチンから戻ると、ナビゲーション処理の終了が指令されているかどうかチェックされ(#8)、終了が指令されていない限り(#8No分岐)、この合流・退出ノード学習ルーチンが繰り返され、終了が指令されると(#8Yes分岐)、ナビゲーション処理が終了する。
【0044】
上述した合流・退出ノード位置学習ルーチンを通じて生成され、記録された学習ノード位置は、ノード位置補正部37によって、当該学習ノード位置に関連付けられている合流・退出ノードの位置に代えて、利用できる。また、記録されている学習ノード位置の精度が所定レベルに達した場合には、地図データベース30における合流・退出ノードの位置を対応する学習ノード位置で書き換えることも可能である。
【0045】
さらには、合流・退出ノード位置学習ルーチンを通じて学習ノード位置が記録されていない合流・退出ノード位置であっても、当該合流・退出ノードの周囲状況が学習ノード位置を記録している合流・退出ノードの周囲状況と近似している場合には、その近似している合流・退出ノードの学習ノード位置を流用することも可能である。そのような処理のルーチンを図8のフローチャートを用いて説明する。なお、ここでは、合流・退出ノードがその合流・退出ノードに関する周囲状況情報に関連付けて記録された周囲状況・ノードテーブルが備えられているとする。
【0046】
まず、周囲状況情報が取得される(#81)。ここでの周囲状況情報とは、まずは道路形状であり、付加的には天候、時刻(明るさ)、道路渋滞度などである。道路形状に関する近似判定条件パラメータとしては、区域識別線の長さ、本線レーンの道路幅、本線レーンのレーン数、合流・退出レーンの道路幅、本線レーンと合流・退出レーンとがなすリンク角度などである。取得された周囲状況情報から走行予定の合流・退出ノードの周囲状況である実周囲状況に類似する周囲状況が記録されているかどうか周囲状況・ノードテーブルを検索する(#82)。検索結果がチェックされ(#83)、類似状況が存在する場合(#83Yes分岐)、さらにその類似状況に関連付けられた合流・退出ノードに学習ノード位置が関連付けられているかどうかチェックする(#84)。類似状況が存在しない場合(#83No分岐)、及び、合流・退出ノードに学習ノード位置が関連付けられていない場合(#84No分岐)、そのままこのルーチンを終了する。合流・退出ノードに学習ノード位置が関連付けられてる場合(#84Yes分岐)、より適切な学習ノード位置を選択する(#85)。そして、選択された学習ノード位置で走行予定の合流・退出ノードの位置を補正する(#86)。なお、ステップ#85での学習ノード選択において、学習ノード位置が1つだけの場合には、当該学習ノード位置と元の合流・退出ノードの位置とで適切な方が選択される。
【0047】
〔その他の実施形態〕
(1)上述した実施の形態では、車両が区域識別線を跨ぎ走行したことを検知する画像認識機能は画像処理ユニット7に備えられていたが、画像処理ユニット7は、画像認識の対象となる撮影画像の前処理だけを行い、実際の画像認識は、別のユニット、例えば、ナビゲーションECU3によって行うような構成を採用してもよい。
【0048】
(2)上述した実施の形態では、合流・退出ノード位置学習部36に、予め選択した学習ノード位置算出アルゴリズムを搭載する構成を採用していたが、複数の学習ノード位置算出アルゴリズムを用意しておいて、任意に選択できるようにしてもよい。
【0049】
(3)上述した実施の形態では、算出された学習ノード位置に基づく補正ノードは、対応する合流・退出ノードと関連付けて記憶されていた。しかしながら同じ合流・退出ノードであっても、道路状況や運転状況によって、合流ないしは退出のためにステアリング操作するタイミングは異なる可能性がある。したがって、同一合流・退出ノードであっても、そのような道路状況や運転状況が異なる毎に学習ノード位置を算定し、道路状況や運転状況別に、補正ノードを記憶してもよい。この構成では、学習ノード位置の利用時には、道路状況や運転状況に応じてより適切な補正ノードを用いることができる。このような学習ノード位置の利用は、当該学習ノード位置に対応する合流・退出ノードだけでなく、道路状況や運転状況が近似する他の合流・退出ノードに対しても行うことができる。
なお、道路状況としては、(1)本線レーンの渋滞度、(2) 合流・退出レーンの渋滞度、(3) 道路形状の一種としての区域識別線の長さ、つまり合流・退出レーンの長さ、(4) 道路形状の一種としての本線レーンや合流・退出レーンの道路幅、(5) 合流・退出が行われる時間帯、などが挙げられる。また、運転状況としては、(11)運転者の疲労度、(12) 合流・退出ノードに対する慣れ度(走行頻度)などが挙げられる。
【0050】
(4)上述した実施の形態では、車両が区域識別線を跨ぎ走行したことを検知するために車載カメラによる路面撮影画像に対する画像認識処理が採用されていた。しかしながら、悪天候時や夜間の走行を考慮して、跨ぎ検知の精度を高めるために、ステアリング操作履歴を参照して算定される走行軌跡から区域識別線の跨ぎ走行の検知を合わせて行い、画像認識の結果と照合するような技術を採用してもよい。
【0051】
(5)上述した実施の形態では、学習ノード位置を道路情報と関連付けるということを、道路情報に含まれている対応の合流・退出ノードに学習ノード位置を関連付けるということにしていたが、これに限定されるわけではなく、例えばリンクに関連付けてもよい。その他の道路情報に含まれているリンク、あるいは特定の地物やシンボルなどに関連付けられてもよい。
【産業上の利用可能性】
【0052】
本発明の道路ノード位置管理システムは、カーナビゲーションのみならず、道路情報に含まれているノードを基準として各種制御を実行するような技術分野に適用可能である。
【符号の説明】
【0053】
3:ナビゲーションECU
31:車両位置情報取得部
32:道路情報取得部
33:走行軌跡算出部
34:識別線跨ぎ検知確認部
35:ステアリング操作履歴管理部
36:合流・退出ノード位置学習部
37:ノード位置補正部
4:ナビゲーション処理部
5:推測航法ユニット
6:GPSユニット
7:画像処理ユニット
7a:撮影画像取得部
70:識別線跨ぎ検知部
71:識別線抽出部
72:識別線画像バッファ
73:識別線跨ぎ判定部
8:車両状態検出管理ユニット
【特許請求の範囲】
【請求項1】
車両の現在位置を表す車両位置情報を取得する車両位置情報取得部と、
複数のリンク及びノードの接続関係により道路を表す道路情報を取得する道路情報取得部と、
本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する前記車両の跨ぎ走行を検知する識別線跨ぎ検知部と、
前記跨ぎ走行の検知時の前記車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として前記道路情報と関連付けて記憶する合流・退出ノード位置学習部と、
を備えた道路ノード位置管理システム。
【請求項2】
前記学習ノード位置を用いて、当該学習ノード位置が演算された前記本線レーンと前記合流・退出レーンとの接続部に対応する前記道路情報中のノード位置を補正するノード位置補正部をさらに備える請求項1に記載の道路ノード位置管理システム。
【請求項3】
前記合流・退出ノード位置学習部は、前記学習ノード位置を、当該学習ノード位置に対応している本線レーン及び合流・退出レーンの道路形状に関連付けて記憶し、前記ノード位置補正部は、前記学習ノード位置と前記道路形状とに基づいて、当該学習ノード位置に対応する合流・退出ノードとは別の合流・退出ノードの位置を補正する請求項2に記載の道路ノード位置管理システム。
【請求項4】
前記合流・退出ノード位置学習部は、前記学習ノード位置を当該学習ノード位置に対応している本線レーンまたは合流・退出レーンあるいはそれら両方のレーンの渋滞状況と関連付けて記憶する請求項1から3のいずれか一項に記載の道路ノード位置管理システム。
【請求項5】
前記学習ノード位置は、前記識別線跨ぎ検知部によって検知された、対応する跨ぎ走行の起因となるステアリング操作開始地点に対応する位置として演算される請求項1から4のいずれか一項に記載の道路ノード位置管理システム。
【請求項6】
前記識別線跨ぎ検知部は、前記画像認識に加えて、ステアリング操作履歴を参照して前記跨ぎ走行の検知を行う請求項1から5のいずれか一項に記載の道路ノード位置管理システム。
【請求項7】
車両の現在位置を表す車両位置情報を取得するステップと、
複数のリンク及びノードの接続関係により道路を表す道路情報を取得するステップと、
本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する前記車両の跨ぎ走行を検知するステップと、
前記跨ぎ走行の検知時の前記車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として前記道路情報と関連付けて記憶する合流・退出ノード位置学習ステップと、
を備えた道路ノード位置管理方法。
【請求項8】
車両の現在位置を表す車両位置情報を取得する機能と、
複数のリンク及びノードの接続関係により道路を表す道路情報を取得する機能と、
本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する前記車両の跨ぎ走行を検知する機能と、
前記跨ぎ走行の検知時の前記車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として前記道路情報と関連付けて記憶する合流・退出ノード位置学習機能と、
をコンピュータに実行させるための道路ノード位置管理プログラム。
【請求項1】
車両の現在位置を表す車両位置情報を取得する車両位置情報取得部と、
複数のリンク及びノードの接続関係により道路を表す道路情報を取得する道路情報取得部と、
本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する前記車両の跨ぎ走行を検知する識別線跨ぎ検知部と、
前記跨ぎ走行の検知時の前記車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として前記道路情報と関連付けて記憶する合流・退出ノード位置学習部と、
を備えた道路ノード位置管理システム。
【請求項2】
前記学習ノード位置を用いて、当該学習ノード位置が演算された前記本線レーンと前記合流・退出レーンとの接続部に対応する前記道路情報中のノード位置を補正するノード位置補正部をさらに備える請求項1に記載の道路ノード位置管理システム。
【請求項3】
前記合流・退出ノード位置学習部は、前記学習ノード位置を、当該学習ノード位置に対応している本線レーン及び合流・退出レーンの道路形状に関連付けて記憶し、前記ノード位置補正部は、前記学習ノード位置と前記道路形状とに基づいて、当該学習ノード位置に対応する合流・退出ノードとは別の合流・退出ノードの位置を補正する請求項2に記載の道路ノード位置管理システム。
【請求項4】
前記合流・退出ノード位置学習部は、前記学習ノード位置を当該学習ノード位置に対応している本線レーンまたは合流・退出レーンあるいはそれら両方のレーンの渋滞状況と関連付けて記憶する請求項1から3のいずれか一項に記載の道路ノード位置管理システム。
【請求項5】
前記学習ノード位置は、前記識別線跨ぎ検知部によって検知された、対応する跨ぎ走行の起因となるステアリング操作開始地点に対応する位置として演算される請求項1から4のいずれか一項に記載の道路ノード位置管理システム。
【請求項6】
前記識別線跨ぎ検知部は、前記画像認識に加えて、ステアリング操作履歴を参照して前記跨ぎ走行の検知を行う請求項1から5のいずれか一項に記載の道路ノード位置管理システム。
【請求項7】
車両の現在位置を表す車両位置情報を取得するステップと、
複数のリンク及びノードの接続関係により道路を表す道路情報を取得するステップと、
本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する前記車両の跨ぎ走行を検知するステップと、
前記跨ぎ走行の検知時の前記車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として前記道路情報と関連付けて記憶する合流・退出ノード位置学習ステップと、
を備えた道路ノード位置管理方法。
【請求項8】
車両の現在位置を表す車両位置情報を取得する機能と、
複数のリンク及びノードの接続関係により道路を表す道路情報を取得する機能と、
本線レーンと合流・退出レーンとの間に設けられている区域識別線の画像認識を通じて当該区域識別線に対する前記車両の跨ぎ走行を検知する機能と、
前記跨ぎ走行の検知時の前記車両位置情報に基づいて合流リンク又は退出リンクと本線リンクとの交点としての合流・退出ノードの道路上の修正位置を演算し、その演算結果を学習ノード位置として前記道路情報と関連付けて記憶する合流・退出ノード位置学習機能と、
をコンピュータに実行させるための道路ノード位置管理プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−118026(P2012−118026A)
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願番号】特願2010−270718(P2010−270718)
【出願日】平成22年12月3日(2010.12.3)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願日】平成22年12月3日(2010.12.3)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]