
道路判定装置
【課題】自車両の走行道路を正しく判定できる道路判定装置を提供することを課題とする。
【解決手段】
判定処理部11は、GPS信号から得る自車両位置情報に基づき、高架道路の下の高架下道路にある交差点を検知し、高架下道路の交差点の路上、又は、この交差点の上方の高架道路の路上をビデオカメラ17に撮影させる。判定処理部11は、撮影された画像を表す画像データに基づき、路上の区画線の不連続部の長さを所定の閾値と比較することにより、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定する。
【解決手段】
判定処理部11は、GPS信号から得る自車両位置情報に基づき、高架道路の下の高架下道路にある交差点を検知し、高架下道路の交差点の路上、又は、この交差点の上方の高架道路の路上をビデオカメラ17に撮影させる。判定処理部11は、撮影された画像を表す画像データに基づき、路上の区画線の不連続部の長さを所定の閾値と比較することにより、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両の走行道路を判定する道路判定装置に関する。
【背景技術】
【0002】
従来より、ナビゲーションシステムにおいて、高架道路と、この高架道路の下にある高架下道路とのいずれを走行しているかを判定するために、高架道路と高架下道路の接続道路の勾配情報を格納しておき、自車両が接続道路を走行しているときに、Gセンサ等から得る勾配情報によって、高架道路に上ったか否かを判定する手法があった(例えば、特許文献1参照)。
【0003】
また、高速道路の出入口の特徴的構造を予め格納しておき、画像認識により入り口又は出口を認識し、この認識結果に基づいて高速道路への進入を判定する手法があった(例えば、特許文献2参照)。
【特許文献1】特開平10−253373号公報
【特許文献2】特開2003−099890号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の判定手法では、判定できる地点は、ナビゲーション装置等に含まれる道路情報の範囲内に限られるため、接続道路の勾配情報や高速道路の出入口等の情報が登録されていない地点では、自車走行道路を正しく判定できないという課題があった。
【0005】
また、接続道路や高速道路の出入口以外の場所では判定できないため、接続道路や出入口等を判定できなかった場合や誤判定した場合には、自車走行道路を正しく判定できず、誤判定した状態が継続するという課題があった。
【0006】
そこで、本発明は、自車両の走行道路を正しく判定できる道路判定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一局面の道路判定装置は、衛星信号から得る自車両位置情報に基づき、高架道路の下の高架下道路にある交差点を検知する交差点検知手段と、前記高架下道路の交差点の路上、又は、当該交差点の上方の前記高架道路の路上を撮影する撮影手段と、前記撮影手段によって撮影される画像を表す画像データに基づき、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定する判定手段とを備える。
【0008】
また、前記判定手段は、前記画像データをパターン分析し、路上の区画線の不連続部の長さを所定の閾値と比較することにより、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定してもよい。
【0009】
また、高架下道路の交差点における区画線又は標識のパターン、又は、当該交差点上の高架道路の区画線又は標識のパターンを表すパターンデータを、当該交差点の位置情報と関連付けて登録するデータベースをさらに備え、前記判定手段は、前記画像データと、前記データベースに登録されたパターンデータとをパターンマッチングすることにより、前記区画線又は前記標識の一致性に基づいて、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定してもよい。
【0010】
また、高架下道路の交差点における区画線又は標識の欠損パターン、又は、当該交差点上の高架道路の区画線又は標識の欠損パターンを表す欠損パターンデータを、当該交差点の位置情報と関連付けて登録する欠損データベースをさらに備え、前記判定手段は、前記画像データと、前記欠損データベースに登録された欠損パターンデータとをパターンマッチングすることにより、前記欠損パターンの一致性に基づいて、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定してもよい。
【0011】
また、前記交差点検知手段は、道路リンク情報を有するナビゲーション装置に含まれており、前記交差点は、当該道路リンク情報から得られる交差点情報と前記自車両位置情報とに基づいて検知されるように構成してもよい。
【発明の効果】
【0012】
本発明によれば、自車両の走行道路を正しく判定できる道路判定装置を提供できるという特有の効果が得られる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の道路判定装置を適用した実施の形態について説明する。ここでは、本発明の道路判定装置がナビゲーション装置の一部の機能を利用するように構成される形態について説明する。また、「区画線」という語は、車道中央線、車線境界線、車道外側線、歩行者横断指導線、車道幅員の変更を表す線、導流帯を表す線等の道路の路面に道路鋲、ペイント又は石等によって描かれた線をいうものとして用い、「交差点」という語は任意の数の道路が任意の角度で交わる点をいうものとして用いる。
【0014】
[実施の形態1]
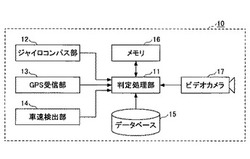
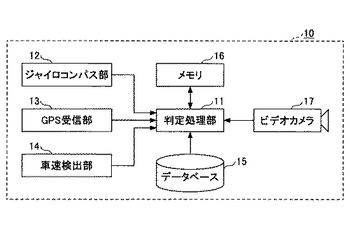
図1は、実施の形態1の道路判定装置の構成を示す図である。
【0015】
この道路判定装置10は、判定処理部11、ジャイロコンパス部12、現在位置検出部13、車速検出部14、データベース15、メモリ16及びビデオカメラ17を備える。
【0016】
判定処理部11は、図示しない演算処理装置やメモリ等を含み、例えば、ナビゲーション装置の主制御処理部で構成することができる。この判定処理部11は、現在位置検出部13から送られる位置データを用いて交差点を検知する交差点検知手段、及び、自車両の走行路を判定する判定手段としての機能を含む。
【0017】
ジャイロコンパス部12は、絶対方位を検出できるジャイロコンパスであればよく、例えば、ナビゲーション装置に含まれるジャイロコンパスであってもよい。検出された絶対方位は、判定処理部11に送られる。
【0018】
現在位置検出部13は、GPS(Global Positioning System)信号を受信し、自車両の現在位置を絶対位置で表す位置データを出力するように構成されていればよく、例えば、ナビゲーション装置に含まれる位置検出部であってもよい。このGPS信号は判定処理部11に送られる。
【0019】
車速検出部14は、図示しない車速センサから送られるパルス信号に基づき、車速を検出する。検出された車速を表す車速データは、判定処理部11に送られる。
【0020】
データベース15は、ナビゲーション装置のハードディスクメモリで構成することができる。このデータベース15は、ナビゲーション装置用の地図データを格納しており、判定処理部11がこの地図データを読み込み可能に構成されていればよい。この地図データは、例えば、交差点の位置データを含む道路リンク情報であればよい。なお、この地図データには、高架道路と高架下道路とが並走する区間であって、その区間内の高架下道路に交差点がある区間を表すデータが含まれている。
【0021】
メモリ16は、ビデオカメラ17から判定処理部11に送られる画像データを一時的に保存するためのメモリであり、例えば、ナビゲーション装置の内部メモリで構成することができる。
【0022】
ビデオカメラ17は、路上の区画線を撮影できる撮影手段であればよく、例えば、車室内のルームミラー付近に前方に向けて装着されるレーンキープ制御用のCCD(Charge Coupled Device)カメラ、又は、車両のテールゲート等に後方に向けて装着されるバックモニタ用のCCDカメラを用いてもよい。このビデオカメラ17で撮影された画像を表す画像データは、判定処理部に送られる。
【0023】
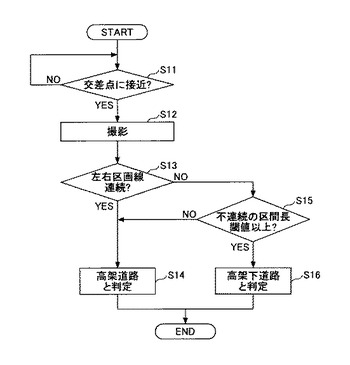
図2は、実施の形態1の道路判定処理装置の判定処理部11における処理手順を示す図である。この処理手順は、高架道路と、その高架道路の下を並走する高架下道路とがある場合に、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定するための処理を表す。このような処理を行うのは、自車両の位置を表す自車両位置データだけでは、走行路が高架道路又は高架下道路のいずれであるのか判定できないからである。
【0024】
判定処理部11は、高架道路が存在する区間への接近を検知すると、判定処理を開始する。なお、この処理は、高架道路が存在する区間を走行中であることを検知した場合に、開始されるようにしてもよい。処理開始後は、高架道路が存在する区間を自車両が走行している間に所定のタイミングで繰り返し実行するように構成してもよい。
【0025】
判定処理部11は、自車両が高架下道路の交差点に接近したか否かを判定する(ステップS11)。高架下道路の交差点の検知は、判定処理部11が現在位置検出部13から送られる位置データをデータベース15に格納されている地図データと照合することによって実行される。このステップS1は、自車両の高架下道路の交差点への接近を検出するまで所定時間毎に繰り返し行われる。このとき、自車両の走行路は高架下道路又は高架道路のいずれかである。
【0026】
次いで、判定処理部11は、ステップS11において検知された交差点がある位置において走行路の路上をビデオカメラ17に撮影させる(ステップS12)。このとき、高架下道路の交差点の路上、又は、交差点の上方の高架道路の路上が撮影される。撮影により得られた画像データは、判定処理部11に送られ、メモリ16に保持される。
【0027】
判定処理部11は、画像データに対してパターン認識処理を行い、画像に含まれる左右の区画線が連続しているか否かを判定する(ステップS13)。画像データは動画データであるため、この判定は、画像データに含まれる各フレームの画像を解析し、路上の左右の区画線が連続するか否かを判定することによって実行される。
【0028】
判定処理部11は、左右の区画線が連続していると判定した場合は、自車両の走行路が高架道路であると判定する(ステップS14)。これは、自車両が交差点の上方の高架道路を走行している場合である。
【0029】
判定処理部11は、ステップS13において左右の区画線が連続でないと判定した場合は、不連続区間の長さを導出し、この区間長が所定の閾値以上であるか否かを判定する(ステップS15)。この不連続区間の長さは、左右の区画線の少なくともいずれか一方が連続でない状態を表す画像のフレーム数と、車速検出部14から送られる車速とに基づいて導出される。所定の閾値は、例えば、10メートル程度に設定すればよい。
【0030】
このように、区画線の不連続区間の長さを検出することによって走行路の判定処理を行うのは、通常、交差点内には車道中央線や車線境界線等の区画線は存在しないため、自車両の位置が交差点上であるときに撮影した画像に、車道中央線や車線境界線の区画線が含まれれば、その画像は高架道路の路上を撮影したものであり、これらの区画線が含まれなければ、高架下道路の交差点の路上を撮影したものであると判別できるからである。
【0031】
判定処理部11は、不連続区間の長さが所定値以上であると判定した場合は、自車両の走行路は高架下道路であると判定する(ステップS16)。これは、高架下道路にある交差点を車両が通過した場合である。
【0032】
なお、判定処理部11は、ステップS15において、不連続区間の長さが所定の閾値より小さいと判定した場合は、ステップS14に進行し、自車両の走行路は高架道路であると判定する。これは、不連続区間が短い場合は、その短い不連続区間は交差点によるものではないと判定し、高架道路を走行していると判定した場合である。
【0033】
以上により、図2に示す処理手順が終了する。
【0034】
本実施の形態の道路判定処理装置によれば、高架道路と、その高架道路の下を並走する高架下道路とがあり、そのいずれかを車両が走行している場合に、車両の左右にある区画線の連続性に基づいて走行路内における交差点の有無を判定するので、自車両の走行路が高架道路又は高架下道路のいずれであるかを正しく判定できる。
【0035】
なお、以上では、道路の左右にある区画線の連続性に基づいて交差点の有無を判定する形態について説明したが、自車両の左側又は右側のいずれか一方の区画線の連続性に基づいて判定処理を行ってもよい。また、例えば、追い越し可能な車線では、区画線が断続線になる等、道路に含まれる車線の数や車線の種類(追い越し可能な車線、又は、追い越し禁止の車線の種別等)は千差万別である。このため、例えば、上述したステップS13では、画像データに含まれる区画線の面積比率で区画線の連続性の判定を行うように構成してもよい。
【0036】
[実施の形態2]
実施の形態2の道路判定装置は、交差点の路上、又は、その交差点の上方の高架道路の路上にある区画線のパターンを表す区画線データがデータベース15内に格納されており、このデータと画像データを判定処理部11が照合することによって、自車両の走行路が高架道路又はこの下を並走する高架下道路のいずれであるかを判定する点が実施の形態1の道路判定装置と異なる。
【0037】
この区画線データには、高架下道路の交差点の路上にある区画線のパターンを表す高架下区画線データと、高架道路の路上のうちの交差点の上方に位置する区間にある区画線のパターンを表す高架区画線データとがある。
【0038】
高架下区画線データは、高架下道路の複数の交差点について予め取得されており、各高架下区画線データは、それぞれの交差点の位置を表す位置データと関連付けられてデータベース15内に登録されている。
【0039】
また、同様に、高架区画線データは、高架下道路の複数の交差点の上方に位置する区間毎に予め取得されており、各高架区画線データは、それぞれの交差点の位置を表す位置データと関連付けられてデータベース15内に登録されている。
【0040】
なお、ここでは、高架下区画線データ及び高架区画線データが事前の撮影によって得られる画像データである形態について説明するが、区画線のパターンを表すデータであれば他の形式のデータであってもよい。また、高架下区画線データ及び高架区画線データは、交差点内だけではなく、交差点の前後の所定距離にわたって予め取得されていることが好ましい。
【0041】
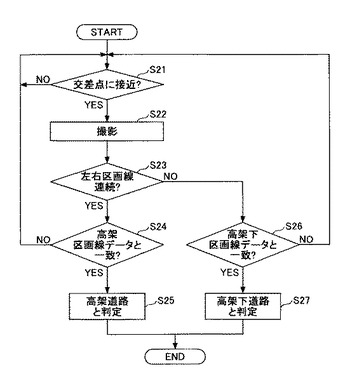
図3は、実施の形態2の道路判定装置における判定処理部11の処理手順を示す図である。この処理手順におけるステップS21からS23は、図2に示す実施の形態1におけるステップS11からS13と同一であるため、その説明を省略する。
【0042】
判定処理部11は、ステップS23において、左右の区画線が連続していると判定した場合は、その交差点の位置を表す位置データを用い、データベース15に格納されている高架区画線データを読み込み、その高架区画線データと画像データとをパターンマッチングし、区画線の一致性を判定する(ステップS24)。
【0043】
判定処理部11は、ステップS24において一致したと判定した場合は、自車両の走行路が高架道路であると判定する(ステップS25)。これは、例えば、自車両が交差点の上方の高架道路を走行しており、撮影された画像に車道中央線や車線境界線が含まれていて、その位置に対応する高架区画線データに含まれる区画線との一致性があると判定された場合である。なお、一致しないと判定した場合は、手順をステップS21にリターンさせる。
【0044】
判定処理部11は、ステップS23において、左右の区画線が連続していないと判定した場合は、その交差点の位置を表す位置データを用い、データベース15に格納されている高架下区画線データを読み込み、その高架下区画線データと画像データとをパターンマッチングし、区画線の一致性を判定する(ステップS26)。
【0045】
判定処理部11は、ステップS26において一致すると判定した場合は、自車両の走行路が高架下道路であると判定する(ステップS27)。これは、例えば、自車両が高架下道路を走行しており、交差点で撮影された画像に車道外側線や歩行者横断指導線が含まれており、その位置に対応する高架下区画線データに含まれる区画線との一致性があると判定された場合である。なお、判定処理部11が一致しないと判定した場合は、手順をステップS21にリターンさせる。
【0046】
以上により、図3に示す処理手順が終了する。
【0047】
本実施の形態の道路判定処理装置によれば、高架道路と、その高架道路の下を並走する高架下道路とがあり、そのいずれかを車両が走行している場合に、路上にある区画線のパターンを表す区画線データと画像データに含まれる区画線との一致性に基づいて走行路を判定するので、自車両の走行路が高架道路又は高架下道路のいずれであるかを正しく判定できる。
【0048】
なお、以上では、区画線の一致性に基づいて自車両の走行路が高架道路又は高架下道路のいずれであるかを判定する形態について説明したが、交差点の路上の標識のパターンを表す標識データを、その交差点の位置データと関連付けてデータベース15に登録しておき、標識の一致性に基づいて自車両の走行路を判定するように構成してもよい。
【0049】
さらに、区画線データと標識データの両方をデータベース15に登録しておき、画像データに応じて区画線データと標識データを使い分けて自車走行路の判定処理を行うようにしてもよい。
【0050】
[実施の形態3]
実施の形態3の道路判定装置は、データベース15内に、地図データ及び区画線群データに加えて欠損区画線データが格納されており、判定処理部11が欠損区画線データと画像データを照合することによって、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定する点が実施の形態1及び2の道路判定装置と異なる。ここでいう欠損とは、例えば、経年変化による区画線の部分的な剥離、タイヤ跡による区画線の欠損等を含む。
【0051】
この欠損区画線データには、高架下道路の交差点の路上にある区画線のパターンに欠損がある場合に、その欠損した区画線のパターンを表す高架下欠損区画線データと、高架道路の路上のうちの交差点の上方に位置する区間にある区画線のパターンに欠損がある場合に、その欠損した区画線のパターンを表す高架欠損区画線データとがある。
【0052】
高架下欠損区画線データは、高架下道路の複数の交差点について予め取得されており、各高架下欠損区画線データは、それぞれの交差点の位置を表す位置データと関連付けられてデータベース15内に登録されている。
【0053】
また、同様に、高架欠損区画線データは、高架下道路の複数の交差点の上方に位置する区間毎に予め取得されており、各高架欠損区画線データは、それぞれの交差点の位置を表す位置データと関連付けられてデータベース15内に登録されている。
【0054】
なお、ここでは、高架欠損下区画線データ及び高架欠損区画線データが事前の撮影によって得られる画像データである形態について説明するが、区画線の欠損パターンを表せるデータであれば、他の形式のデータであってもよい。また、高架欠損区画線データ及び高架下欠損区画線データは、交差点内だけではなく、交差点の前後の所定距離にわたって予め取得されていることが好ましい。
【0055】
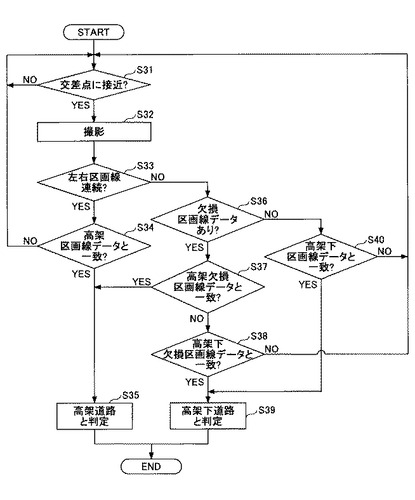
図4は、実施の形態3の道路判定装置における判定処理部11の処理手順を示す図である。この処理手順におけるステップS31からS35は、図3に示す実施の形態2におけるステップS21からS25と同一であるため、その説明を省略する。
【0056】
判定処理部11は、ステップS33において、左右の区画線が連続していないと判定した場合は、その交差点の位置を表す位置データに基づき、データベース15に、その交差点の位置に対応する欠損区画線データが含まれているか否かを判定する(ステップS36)。
【0057】
判定処理部11は、その交差点の位置データに関連付けられた欠損区画線データがあると判定した場合には、高架欠損区画線データと画像データとをパターンマッチングし、一致性を判定する(ステップS37)。
【0058】
判定処理部11は、ステップS37において一致すると判定した場合は、手順をステップS35に進行させ、自車両の走行路が高架道路であると判定する。これは、例えば、自車両が交差点の上方の高架道路を走行しており、撮影された画像に欠損のある車道中央線や車線境界線が含まれていて、その位置に対応する高架欠損区画線データに含まれる区画線との一致性があると判定された場合である。
【0059】
判定処理部11は、ステップS37において一致しないと判定した場合は、その交差点の位置データに関連付けられた高架下欠損区画線データと画像データとをパターンマッチングし、一致性を判定する(ステップS38)。
【0060】
判定処理部11は、ステップS38において一致すると判定した場合は、自車両の走行路が高架下道路であると判定する(ステップS39)。これは、例えば、自車両が高架下道路を走行しており、交差点で撮影された画像に欠損のある車道外側線や歩行者横断指導線が含まれており、その位置に対応する高架下区画線データに含まれる区画線との一致性があると判定された場合である。
【0061】
なお、ステップS36において、その交差点の位置データに関連付けられた欠損区画線データが登録されていないと判定した場合は、判定処理部11は、その交差点の位置を表す位置データを用い、データベース15に格納されている高架下区画線データを読み込み、その高架下区画線データと画像データとをパターンマッチングし、一致性を判定する(ステップS40)。このステップS40の処理は、実施の形態2におけるステップS26の処理と同一である。
【0062】
判定処理部11は、ステップS40において一致すると判定した場合は、手順をステップS39に進行させ、自車両の走行路が高架下道路であると判定する。なお、ステップS40において、判定処理部11が一致しないと判定した場合は、手順をステップS31にリターンさせる。
【0063】
以上により、図4に示す処理手順が終了する。
【0064】
本実施の形態の道路判定処理装置によれば、高架道路と、その高架道路に平行な高架下道路とがあり、そのいずれかを車両が走行している場合に、自車両の左右にある区画線のパターンを表す区画線データ又は欠損区画線データと画像データとをパターンマッチングし、区画線の一致性に基づいて走行路内を判定するので、区画線に欠損があって本来のパターンと異なっていても、自車両の走行路が高架道路又は高架下道路のどちらであるかを正しく判定できる。
【0065】
なお、以上では、欠損区画線データとして高架欠損区画線データと高架下欠損区画線データとの2つのデータが含まれる形態について説明したが、高架欠損区画線データ又は高架下欠損区画線データのいずれか一方が含まれるように構成してもよい。
【0066】
また、上述のように、ある交差点について、高架欠損区画線データと高架下欠損区画線データとの両方が必ずしも存在する必要はなく、交差点によっては一方のデータだけが登録されていてもよい。
【0067】
また、以上では、区画線の欠損パターンの一致性に基づいて自車両の走行路が高架道路又は高架下道路のいずれであるかを判定する形態について説明したが、交差点の路上の標識の欠損パターンを表す欠損標識データを、その交差点の位置データと関連付けた欠損標識データをデータベース15に登録しておき、標識の欠損パターンの一致性に基づいて自車両の走行路を判定するように構成してもよい。
【0068】
さらに、欠損区画線データ及び欠損標識データの両方のデータをデータベース15に登録しておき、画像データに応じて欠損区画線データ及び欠損標識データを使い分けて自車走行路の判定処理を行うようにしてもよい。
【0069】
以上、本発明の例示的な実施の形態の道路判定装置について説明したが、本発明は、具体的に開示された実施の形態に限定されるものではなく、特許請求の範囲から逸脱することなく、種々の変形や変更が可能である。
【産業上の利用可能性】
【0070】
本発明の道路判定装置は、ナビゲーション装置に利用可能である。
【図面の簡単な説明】
【0071】
【図1】実施の形態1の道路判定装置の構成を示す図である。
【図2】実施の形態1の道路判定処理装置の判定処理部11における処理手順を示す図である。
【図3】実施の形態2の道路判定処理装置の判定処理部11における処理手順を示す図である。
【図4】実施の形態3の道路判定処理装置の判定処理部11における処理手順を示す図である。
【符号の説明】
【0072】
10…道路判定装置
11…判定処理部
12…ジャイロコンパス部
13…現在位置検出部
14…車速検出部
15…データベース
16…メモリ
17…ビデオカメラ
【技術分野】
【0001】
本発明は、自車両の走行道路を判定する道路判定装置に関する。
【背景技術】
【0002】
従来より、ナビゲーションシステムにおいて、高架道路と、この高架道路の下にある高架下道路とのいずれを走行しているかを判定するために、高架道路と高架下道路の接続道路の勾配情報を格納しておき、自車両が接続道路を走行しているときに、Gセンサ等から得る勾配情報によって、高架道路に上ったか否かを判定する手法があった(例えば、特許文献1参照)。
【0003】
また、高速道路の出入口の特徴的構造を予め格納しておき、画像認識により入り口又は出口を認識し、この認識結果に基づいて高速道路への進入を判定する手法があった(例えば、特許文献2参照)。
【特許文献1】特開平10−253373号公報
【特許文献2】特開2003−099890号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の判定手法では、判定できる地点は、ナビゲーション装置等に含まれる道路情報の範囲内に限られるため、接続道路の勾配情報や高速道路の出入口等の情報が登録されていない地点では、自車走行道路を正しく判定できないという課題があった。
【0005】
また、接続道路や高速道路の出入口以外の場所では判定できないため、接続道路や出入口等を判定できなかった場合や誤判定した場合には、自車走行道路を正しく判定できず、誤判定した状態が継続するという課題があった。
【0006】
そこで、本発明は、自車両の走行道路を正しく判定できる道路判定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一局面の道路判定装置は、衛星信号から得る自車両位置情報に基づき、高架道路の下の高架下道路にある交差点を検知する交差点検知手段と、前記高架下道路の交差点の路上、又は、当該交差点の上方の前記高架道路の路上を撮影する撮影手段と、前記撮影手段によって撮影される画像を表す画像データに基づき、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定する判定手段とを備える。
【0008】
また、前記判定手段は、前記画像データをパターン分析し、路上の区画線の不連続部の長さを所定の閾値と比較することにより、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定してもよい。
【0009】
また、高架下道路の交差点における区画線又は標識のパターン、又は、当該交差点上の高架道路の区画線又は標識のパターンを表すパターンデータを、当該交差点の位置情報と関連付けて登録するデータベースをさらに備え、前記判定手段は、前記画像データと、前記データベースに登録されたパターンデータとをパターンマッチングすることにより、前記区画線又は前記標識の一致性に基づいて、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定してもよい。
【0010】
また、高架下道路の交差点における区画線又は標識の欠損パターン、又は、当該交差点上の高架道路の区画線又は標識の欠損パターンを表す欠損パターンデータを、当該交差点の位置情報と関連付けて登録する欠損データベースをさらに備え、前記判定手段は、前記画像データと、前記欠損データベースに登録された欠損パターンデータとをパターンマッチングすることにより、前記欠損パターンの一致性に基づいて、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定してもよい。
【0011】
また、前記交差点検知手段は、道路リンク情報を有するナビゲーション装置に含まれており、前記交差点は、当該道路リンク情報から得られる交差点情報と前記自車両位置情報とに基づいて検知されるように構成してもよい。
【発明の効果】
【0012】
本発明によれば、自車両の走行道路を正しく判定できる道路判定装置を提供できるという特有の効果が得られる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の道路判定装置を適用した実施の形態について説明する。ここでは、本発明の道路判定装置がナビゲーション装置の一部の機能を利用するように構成される形態について説明する。また、「区画線」という語は、車道中央線、車線境界線、車道外側線、歩行者横断指導線、車道幅員の変更を表す線、導流帯を表す線等の道路の路面に道路鋲、ペイント又は石等によって描かれた線をいうものとして用い、「交差点」という語は任意の数の道路が任意の角度で交わる点をいうものとして用いる。
【0014】
[実施の形態1]
図1は、実施の形態1の道路判定装置の構成を示す図である。
【0015】
この道路判定装置10は、判定処理部11、ジャイロコンパス部12、現在位置検出部13、車速検出部14、データベース15、メモリ16及びビデオカメラ17を備える。
【0016】
判定処理部11は、図示しない演算処理装置やメモリ等を含み、例えば、ナビゲーション装置の主制御処理部で構成することができる。この判定処理部11は、現在位置検出部13から送られる位置データを用いて交差点を検知する交差点検知手段、及び、自車両の走行路を判定する判定手段としての機能を含む。
【0017】
ジャイロコンパス部12は、絶対方位を検出できるジャイロコンパスであればよく、例えば、ナビゲーション装置に含まれるジャイロコンパスであってもよい。検出された絶対方位は、判定処理部11に送られる。
【0018】
現在位置検出部13は、GPS(Global Positioning System)信号を受信し、自車両の現在位置を絶対位置で表す位置データを出力するように構成されていればよく、例えば、ナビゲーション装置に含まれる位置検出部であってもよい。このGPS信号は判定処理部11に送られる。
【0019】
車速検出部14は、図示しない車速センサから送られるパルス信号に基づき、車速を検出する。検出された車速を表す車速データは、判定処理部11に送られる。
【0020】
データベース15は、ナビゲーション装置のハードディスクメモリで構成することができる。このデータベース15は、ナビゲーション装置用の地図データを格納しており、判定処理部11がこの地図データを読み込み可能に構成されていればよい。この地図データは、例えば、交差点の位置データを含む道路リンク情報であればよい。なお、この地図データには、高架道路と高架下道路とが並走する区間であって、その区間内の高架下道路に交差点がある区間を表すデータが含まれている。
【0021】
メモリ16は、ビデオカメラ17から判定処理部11に送られる画像データを一時的に保存するためのメモリであり、例えば、ナビゲーション装置の内部メモリで構成することができる。
【0022】
ビデオカメラ17は、路上の区画線を撮影できる撮影手段であればよく、例えば、車室内のルームミラー付近に前方に向けて装着されるレーンキープ制御用のCCD(Charge Coupled Device)カメラ、又は、車両のテールゲート等に後方に向けて装着されるバックモニタ用のCCDカメラを用いてもよい。このビデオカメラ17で撮影された画像を表す画像データは、判定処理部に送られる。
【0023】
図2は、実施の形態1の道路判定処理装置の判定処理部11における処理手順を示す図である。この処理手順は、高架道路と、その高架道路の下を並走する高架下道路とがある場合に、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定するための処理を表す。このような処理を行うのは、自車両の位置を表す自車両位置データだけでは、走行路が高架道路又は高架下道路のいずれであるのか判定できないからである。
【0024】
判定処理部11は、高架道路が存在する区間への接近を検知すると、判定処理を開始する。なお、この処理は、高架道路が存在する区間を走行中であることを検知した場合に、開始されるようにしてもよい。処理開始後は、高架道路が存在する区間を自車両が走行している間に所定のタイミングで繰り返し実行するように構成してもよい。
【0025】
判定処理部11は、自車両が高架下道路の交差点に接近したか否かを判定する(ステップS11)。高架下道路の交差点の検知は、判定処理部11が現在位置検出部13から送られる位置データをデータベース15に格納されている地図データと照合することによって実行される。このステップS1は、自車両の高架下道路の交差点への接近を検出するまで所定時間毎に繰り返し行われる。このとき、自車両の走行路は高架下道路又は高架道路のいずれかである。
【0026】
次いで、判定処理部11は、ステップS11において検知された交差点がある位置において走行路の路上をビデオカメラ17に撮影させる(ステップS12)。このとき、高架下道路の交差点の路上、又は、交差点の上方の高架道路の路上が撮影される。撮影により得られた画像データは、判定処理部11に送られ、メモリ16に保持される。
【0027】
判定処理部11は、画像データに対してパターン認識処理を行い、画像に含まれる左右の区画線が連続しているか否かを判定する(ステップS13)。画像データは動画データであるため、この判定は、画像データに含まれる各フレームの画像を解析し、路上の左右の区画線が連続するか否かを判定することによって実行される。
【0028】
判定処理部11は、左右の区画線が連続していると判定した場合は、自車両の走行路が高架道路であると判定する(ステップS14)。これは、自車両が交差点の上方の高架道路を走行している場合である。
【0029】
判定処理部11は、ステップS13において左右の区画線が連続でないと判定した場合は、不連続区間の長さを導出し、この区間長が所定の閾値以上であるか否かを判定する(ステップS15)。この不連続区間の長さは、左右の区画線の少なくともいずれか一方が連続でない状態を表す画像のフレーム数と、車速検出部14から送られる車速とに基づいて導出される。所定の閾値は、例えば、10メートル程度に設定すればよい。
【0030】
このように、区画線の不連続区間の長さを検出することによって走行路の判定処理を行うのは、通常、交差点内には車道中央線や車線境界線等の区画線は存在しないため、自車両の位置が交差点上であるときに撮影した画像に、車道中央線や車線境界線の区画線が含まれれば、その画像は高架道路の路上を撮影したものであり、これらの区画線が含まれなければ、高架下道路の交差点の路上を撮影したものであると判別できるからである。
【0031】
判定処理部11は、不連続区間の長さが所定値以上であると判定した場合は、自車両の走行路は高架下道路であると判定する(ステップS16)。これは、高架下道路にある交差点を車両が通過した場合である。
【0032】
なお、判定処理部11は、ステップS15において、不連続区間の長さが所定の閾値より小さいと判定した場合は、ステップS14に進行し、自車両の走行路は高架道路であると判定する。これは、不連続区間が短い場合は、その短い不連続区間は交差点によるものではないと判定し、高架道路を走行していると判定した場合である。
【0033】
以上により、図2に示す処理手順が終了する。
【0034】
本実施の形態の道路判定処理装置によれば、高架道路と、その高架道路の下を並走する高架下道路とがあり、そのいずれかを車両が走行している場合に、車両の左右にある区画線の連続性に基づいて走行路内における交差点の有無を判定するので、自車両の走行路が高架道路又は高架下道路のいずれであるかを正しく判定できる。
【0035】
なお、以上では、道路の左右にある区画線の連続性に基づいて交差点の有無を判定する形態について説明したが、自車両の左側又は右側のいずれか一方の区画線の連続性に基づいて判定処理を行ってもよい。また、例えば、追い越し可能な車線では、区画線が断続線になる等、道路に含まれる車線の数や車線の種類(追い越し可能な車線、又は、追い越し禁止の車線の種別等)は千差万別である。このため、例えば、上述したステップS13では、画像データに含まれる区画線の面積比率で区画線の連続性の判定を行うように構成してもよい。
【0036】
[実施の形態2]
実施の形態2の道路判定装置は、交差点の路上、又は、その交差点の上方の高架道路の路上にある区画線のパターンを表す区画線データがデータベース15内に格納されており、このデータと画像データを判定処理部11が照合することによって、自車両の走行路が高架道路又はこの下を並走する高架下道路のいずれであるかを判定する点が実施の形態1の道路判定装置と異なる。
【0037】
この区画線データには、高架下道路の交差点の路上にある区画線のパターンを表す高架下区画線データと、高架道路の路上のうちの交差点の上方に位置する区間にある区画線のパターンを表す高架区画線データとがある。
【0038】
高架下区画線データは、高架下道路の複数の交差点について予め取得されており、各高架下区画線データは、それぞれの交差点の位置を表す位置データと関連付けられてデータベース15内に登録されている。
【0039】
また、同様に、高架区画線データは、高架下道路の複数の交差点の上方に位置する区間毎に予め取得されており、各高架区画線データは、それぞれの交差点の位置を表す位置データと関連付けられてデータベース15内に登録されている。
【0040】
なお、ここでは、高架下区画線データ及び高架区画線データが事前の撮影によって得られる画像データである形態について説明するが、区画線のパターンを表すデータであれば他の形式のデータであってもよい。また、高架下区画線データ及び高架区画線データは、交差点内だけではなく、交差点の前後の所定距離にわたって予め取得されていることが好ましい。
【0041】
図3は、実施の形態2の道路判定装置における判定処理部11の処理手順を示す図である。この処理手順におけるステップS21からS23は、図2に示す実施の形態1におけるステップS11からS13と同一であるため、その説明を省略する。
【0042】
判定処理部11は、ステップS23において、左右の区画線が連続していると判定した場合は、その交差点の位置を表す位置データを用い、データベース15に格納されている高架区画線データを読み込み、その高架区画線データと画像データとをパターンマッチングし、区画線の一致性を判定する(ステップS24)。
【0043】
判定処理部11は、ステップS24において一致したと判定した場合は、自車両の走行路が高架道路であると判定する(ステップS25)。これは、例えば、自車両が交差点の上方の高架道路を走行しており、撮影された画像に車道中央線や車線境界線が含まれていて、その位置に対応する高架区画線データに含まれる区画線との一致性があると判定された場合である。なお、一致しないと判定した場合は、手順をステップS21にリターンさせる。
【0044】
判定処理部11は、ステップS23において、左右の区画線が連続していないと判定した場合は、その交差点の位置を表す位置データを用い、データベース15に格納されている高架下区画線データを読み込み、その高架下区画線データと画像データとをパターンマッチングし、区画線の一致性を判定する(ステップS26)。
【0045】
判定処理部11は、ステップS26において一致すると判定した場合は、自車両の走行路が高架下道路であると判定する(ステップS27)。これは、例えば、自車両が高架下道路を走行しており、交差点で撮影された画像に車道外側線や歩行者横断指導線が含まれており、その位置に対応する高架下区画線データに含まれる区画線との一致性があると判定された場合である。なお、判定処理部11が一致しないと判定した場合は、手順をステップS21にリターンさせる。
【0046】
以上により、図3に示す処理手順が終了する。
【0047】
本実施の形態の道路判定処理装置によれば、高架道路と、その高架道路の下を並走する高架下道路とがあり、そのいずれかを車両が走行している場合に、路上にある区画線のパターンを表す区画線データと画像データに含まれる区画線との一致性に基づいて走行路を判定するので、自車両の走行路が高架道路又は高架下道路のいずれであるかを正しく判定できる。
【0048】
なお、以上では、区画線の一致性に基づいて自車両の走行路が高架道路又は高架下道路のいずれであるかを判定する形態について説明したが、交差点の路上の標識のパターンを表す標識データを、その交差点の位置データと関連付けてデータベース15に登録しておき、標識の一致性に基づいて自車両の走行路を判定するように構成してもよい。
【0049】
さらに、区画線データと標識データの両方をデータベース15に登録しておき、画像データに応じて区画線データと標識データを使い分けて自車走行路の判定処理を行うようにしてもよい。
【0050】
[実施の形態3]
実施の形態3の道路判定装置は、データベース15内に、地図データ及び区画線群データに加えて欠損区画線データが格納されており、判定処理部11が欠損区画線データと画像データを照合することによって、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定する点が実施の形態1及び2の道路判定装置と異なる。ここでいう欠損とは、例えば、経年変化による区画線の部分的な剥離、タイヤ跡による区画線の欠損等を含む。
【0051】
この欠損区画線データには、高架下道路の交差点の路上にある区画線のパターンに欠損がある場合に、その欠損した区画線のパターンを表す高架下欠損区画線データと、高架道路の路上のうちの交差点の上方に位置する区間にある区画線のパターンに欠損がある場合に、その欠損した区画線のパターンを表す高架欠損区画線データとがある。
【0052】
高架下欠損区画線データは、高架下道路の複数の交差点について予め取得されており、各高架下欠損区画線データは、それぞれの交差点の位置を表す位置データと関連付けられてデータベース15内に登録されている。
【0053】
また、同様に、高架欠損区画線データは、高架下道路の複数の交差点の上方に位置する区間毎に予め取得されており、各高架欠損区画線データは、それぞれの交差点の位置を表す位置データと関連付けられてデータベース15内に登録されている。
【0054】
なお、ここでは、高架欠損下区画線データ及び高架欠損区画線データが事前の撮影によって得られる画像データである形態について説明するが、区画線の欠損パターンを表せるデータであれば、他の形式のデータであってもよい。また、高架欠損区画線データ及び高架下欠損区画線データは、交差点内だけではなく、交差点の前後の所定距離にわたって予め取得されていることが好ましい。
【0055】
図4は、実施の形態3の道路判定装置における判定処理部11の処理手順を示す図である。この処理手順におけるステップS31からS35は、図3に示す実施の形態2におけるステップS21からS25と同一であるため、その説明を省略する。
【0056】
判定処理部11は、ステップS33において、左右の区画線が連続していないと判定した場合は、その交差点の位置を表す位置データに基づき、データベース15に、その交差点の位置に対応する欠損区画線データが含まれているか否かを判定する(ステップS36)。
【0057】
判定処理部11は、その交差点の位置データに関連付けられた欠損区画線データがあると判定した場合には、高架欠損区画線データと画像データとをパターンマッチングし、一致性を判定する(ステップS37)。
【0058】
判定処理部11は、ステップS37において一致すると判定した場合は、手順をステップS35に進行させ、自車両の走行路が高架道路であると判定する。これは、例えば、自車両が交差点の上方の高架道路を走行しており、撮影された画像に欠損のある車道中央線や車線境界線が含まれていて、その位置に対応する高架欠損区画線データに含まれる区画線との一致性があると判定された場合である。
【0059】
判定処理部11は、ステップS37において一致しないと判定した場合は、その交差点の位置データに関連付けられた高架下欠損区画線データと画像データとをパターンマッチングし、一致性を判定する(ステップS38)。
【0060】
判定処理部11は、ステップS38において一致すると判定した場合は、自車両の走行路が高架下道路であると判定する(ステップS39)。これは、例えば、自車両が高架下道路を走行しており、交差点で撮影された画像に欠損のある車道外側線や歩行者横断指導線が含まれており、その位置に対応する高架下区画線データに含まれる区画線との一致性があると判定された場合である。
【0061】
なお、ステップS36において、その交差点の位置データに関連付けられた欠損区画線データが登録されていないと判定した場合は、判定処理部11は、その交差点の位置を表す位置データを用い、データベース15に格納されている高架下区画線データを読み込み、その高架下区画線データと画像データとをパターンマッチングし、一致性を判定する(ステップS40)。このステップS40の処理は、実施の形態2におけるステップS26の処理と同一である。
【0062】
判定処理部11は、ステップS40において一致すると判定した場合は、手順をステップS39に進行させ、自車両の走行路が高架下道路であると判定する。なお、ステップS40において、判定処理部11が一致しないと判定した場合は、手順をステップS31にリターンさせる。
【0063】
以上により、図4に示す処理手順が終了する。
【0064】
本実施の形態の道路判定処理装置によれば、高架道路と、その高架道路に平行な高架下道路とがあり、そのいずれかを車両が走行している場合に、自車両の左右にある区画線のパターンを表す区画線データ又は欠損区画線データと画像データとをパターンマッチングし、区画線の一致性に基づいて走行路内を判定するので、区画線に欠損があって本来のパターンと異なっていても、自車両の走行路が高架道路又は高架下道路のどちらであるかを正しく判定できる。
【0065】
なお、以上では、欠損区画線データとして高架欠損区画線データと高架下欠損区画線データとの2つのデータが含まれる形態について説明したが、高架欠損区画線データ又は高架下欠損区画線データのいずれか一方が含まれるように構成してもよい。
【0066】
また、上述のように、ある交差点について、高架欠損区画線データと高架下欠損区画線データとの両方が必ずしも存在する必要はなく、交差点によっては一方のデータだけが登録されていてもよい。
【0067】
また、以上では、区画線の欠損パターンの一致性に基づいて自車両の走行路が高架道路又は高架下道路のいずれであるかを判定する形態について説明したが、交差点の路上の標識の欠損パターンを表す欠損標識データを、その交差点の位置データと関連付けた欠損標識データをデータベース15に登録しておき、標識の欠損パターンの一致性に基づいて自車両の走行路を判定するように構成してもよい。
【0068】
さらに、欠損区画線データ及び欠損標識データの両方のデータをデータベース15に登録しておき、画像データに応じて欠損区画線データ及び欠損標識データを使い分けて自車走行路の判定処理を行うようにしてもよい。
【0069】
以上、本発明の例示的な実施の形態の道路判定装置について説明したが、本発明は、具体的に開示された実施の形態に限定されるものではなく、特許請求の範囲から逸脱することなく、種々の変形や変更が可能である。
【産業上の利用可能性】
【0070】
本発明の道路判定装置は、ナビゲーション装置に利用可能である。
【図面の簡単な説明】
【0071】
【図1】実施の形態1の道路判定装置の構成を示す図である。
【図2】実施の形態1の道路判定処理装置の判定処理部11における処理手順を示す図である。
【図3】実施の形態2の道路判定処理装置の判定処理部11における処理手順を示す図である。
【図4】実施の形態3の道路判定処理装置の判定処理部11における処理手順を示す図である。
【符号の説明】
【0072】
10…道路判定装置
11…判定処理部
12…ジャイロコンパス部
13…現在位置検出部
14…車速検出部
15…データベース
16…メモリ
17…ビデオカメラ
【特許請求の範囲】
【請求項1】
衛星信号から得る自車両位置情報に基づき、高架道路の下の高架下道路にある交差点を検知する交差点検知手段と、
前記高架下道路の交差点の路上、又は、当該交差点の上方の前記高架道路の路上を撮影する撮影手段と、
前記撮影手段によって撮影される画像を表す画像データに基づき、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定する判定手段と
を備える道路判定装置。
【請求項2】
前記判定手段は、前記画像データをパターン分析し、路上の区画線の不連続部の長さを所定の閾値と比較することにより、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定することを特徴とする請求項1に記載の道路判定装置。
【請求項3】
高架下道路の交差点における区画線又は標識のパターン、又は、当該交差点上の高架道路の区画線又は標識のパターンを表すパターンデータを、当該交差点の位置情報と関連付けて登録するデータベースをさらに備え、
前記判定手段は、前記画像データと、前記データベースに登録されたパターンデータとをパターンマッチングすることにより、前記区画線又は前記標識の一致性に基づいて、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定することを特徴とする請求項1又は2に記載の道路判定装置。
【請求項4】
高架下道路の交差点における区画線又は標識の欠損パターン、又は、当該交差点上の高架道路の区画線又は標識の欠損パターンを表す欠損パターンデータを、当該交差点の位置情報と関連付けて登録する欠損パターン用データベースをさらに備え、
前記判定手段は、前記画像データと、前記欠損パターン用データベースに登録された欠損パターンデータとをパターンマッチングすることにより、前記欠損パターンの一致性に基づいて、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定することを特徴とする請求項1乃至3のいずれかの項に記載の道路判定装置。
【請求項5】
前記交差点検知手段は、道路リンク情報を有するナビゲーション装置に含まれており、前記交差点は、当該道路リンク情報から得られる交差点情報と前記自車両位置情報とに基づいて検知されることを特徴とする請求項1乃至4のいずれかの項に記載の道路判定装置。
【請求項1】
衛星信号から得る自車両位置情報に基づき、高架道路の下の高架下道路にある交差点を検知する交差点検知手段と、
前記高架下道路の交差点の路上、又は、当該交差点の上方の前記高架道路の路上を撮影する撮影手段と、
前記撮影手段によって撮影される画像を表す画像データに基づき、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定する判定手段と
を備える道路判定装置。
【請求項2】
前記判定手段は、前記画像データをパターン分析し、路上の区画線の不連続部の長さを所定の閾値と比較することにより、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定することを特徴とする請求項1に記載の道路判定装置。
【請求項3】
高架下道路の交差点における区画線又は標識のパターン、又は、当該交差点上の高架道路の区画線又は標識のパターンを表すパターンデータを、当該交差点の位置情報と関連付けて登録するデータベースをさらに備え、
前記判定手段は、前記画像データと、前記データベースに登録されたパターンデータとをパターンマッチングすることにより、前記区画線又は前記標識の一致性に基づいて、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定することを特徴とする請求項1又は2に記載の道路判定装置。
【請求項4】
高架下道路の交差点における区画線又は標識の欠損パターン、又は、当該交差点上の高架道路の区画線又は標識の欠損パターンを表す欠損パターンデータを、当該交差点の位置情報と関連付けて登録する欠損パターン用データベースをさらに備え、
前記判定手段は、前記画像データと、前記欠損パターン用データベースに登録された欠損パターンデータとをパターンマッチングすることにより、前記欠損パターンの一致性に基づいて、自車両の走行路が高架道路又は高架下道路のいずれであるかを判定することを特徴とする請求項1乃至3のいずれかの項に記載の道路判定装置。
【請求項5】
前記交差点検知手段は、道路リンク情報を有するナビゲーション装置に含まれており、前記交差点は、当該道路リンク情報から得られる交差点情報と前記自車両位置情報とに基づいて検知されることを特徴とする請求項1乃至4のいずれかの項に記載の道路判定装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−164506(P2008−164506A)
【公開日】平成20年7月17日(2008.7.17)
【国際特許分類】
【出願番号】特願2006−356069(P2006−356069)
【出願日】平成18年12月28日(2006.12.28)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成20年7月17日(2008.7.17)
【国際特許分類】
【出願日】平成18年12月28日(2006.12.28)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]