
道路学習装置
【課題】推測航法により算出された走行軌跡に基づいて道路学習する技術においては、車両の走行距離及び車両進行方向に基づいて走行軌跡を算出するため、その形状は道路らしく滑らかな軌跡となるものの、車両進行方向を検出するためのジャイロセンサから発生する電圧オフセットの影響により、走行距離が長くなればなるほど、その誤差が累積されてしまう。
【解決手段】新規道路22の更新を行う場合に、その新規道路を走行した際の推測航法による走行軌跡28に含まれる累積誤差を除去することで、より実際の新規道路の形状に即するようにして新規道路の更新を行うことができる。
【解決手段】新規道路22の更新を行う場合に、その新規道路を走行した際の推測航法による走行軌跡28に含まれる累積誤差を除去することで、より実際の新規道路の形状に即するようにして新規道路の更新を行うことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路地図データに記憶されていない道路を移動した際に、その軌跡を利用して、新たな道路を地図データに登録する道路学習装置に関する。
【背景技術】
【0002】
従来、新しく開通された道路等、既存の地図データに記憶されていない道路を車両が走行した場合に、その道路を地図データに自動的に変更、修正、追加等を行うことで既存の地図データを更新する技術が知られている。例えば、特許文献1に記載の技術では、新規道路を車両が走行した際の推測航法に基づく車両の走行軌跡を、地図データにおける新規道路が存在する始端地点と終端地点との間にはめ込むように、走行軌跡の形状を回転・拡大縮小することにより新規道路を学習し、地図データの更新を行っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−201392号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
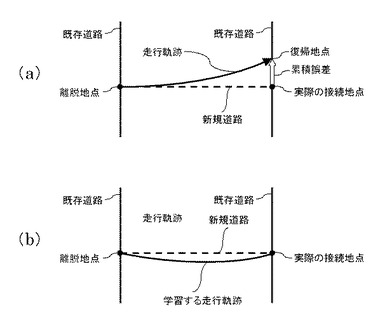
しかしながら、推測航法に基づく走行軌跡は、車両の走行距離及び車両進行方向に基づいて走行軌跡を算出するため、その形状は道路らしく滑らかな軌跡となるものの、車両進行方向を検出するためのジャイロセンサから発生する電圧オフセットの影響により、走行距離が長くなればなるほど、その誤差が累積される。そのため、図7(a)に示すように、車両の走行軌跡は実際の新規道路とは異なった形状となり、その結果、実際の新規道路と既存道路との接続地点と、車両の走行軌跡が既存道路に復帰する復帰地点との間にズレが生じてしまう。そして、特許文献1に記載のように地図データの更新を行うと、推測航法による誤差を考慮することなく、新規道路が存在する始端地点と終端地点との間にはめ込むように新規道路を学習するため、図7(b)に示すように、新規道路として学習する道路軌跡は実際の新規道路の形状と大きくずれてしまうといった問題があった。
【0005】
そこで、本発明は上記問題に鑑みてなされたものであり、推測航法に基づく車両の走行軌跡を新規道路として地図データに更新する際に、より実際の道路の形状に即するように新規道路の学習を行う道路学習装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、請求項1に記載の発明は、道路地図を記憶する地図データベースと、推測航法により自車両の位置を検出する自車位置検出部と、自車位置検出部により検出される自車位置が移動する走行軌跡を記憶する走行軌跡記憶部と、自車両が、地図データベース上に記憶されていない新規道路を走行していたか否かを判定する新規道路走行判定手段と、新規道路走行判定手段により、自車両が新規道路を走行していたと判定した場合に、走行軌跡記憶部に記憶される自車両の走行軌跡を新規道路として地図データベースに更新する新規道路更新手段とを備える道路学習装置であって、新規道路走行判定手段により、自車両が新規道路を走行していたと判定した場合に、自車両が、新規道路に相当する走行軌跡に、この新規道路を自車両が走行している間に累積される誤差を算出する累積誤差算出手段と、累積誤差算出手段により算出される累積誤差を補正する累積誤差補正手段とをさらに備え、新規道路更新手段にて、累積誤差補正手段により補正された後の走行軌跡を新規道路として地図データベースに更新することを特徴とする。
【0007】
請求項1に記載の発明によれば、自車が走行した新規道路に相当する走行軌跡を新たな道路として地図データに更新する際に、新規道路に相当する走行軌跡を車両が走行する間に新規道路に相当する走行軌跡に累積される誤差を算出し、その累積誤差を補正する。これにより、より実際の道路の形状に即するようにして走行軌跡を新規道路として更新することが可能となる。
【0008】
請求項2に記載の道路更新装置は、新規道路更新手段にて、新規道路走行判定手段により自車両が新規道路を走行し始めたと判定されるタイミングにおける走行軌跡上の点を始点とし、新規道路走行判定手段により自車両が新規道路を走行し終えたと判定されるタイミングにおける走行軌跡上の点を終点とし、始点及び前記終点の区間の走行軌跡を新規道路として前記地図データベースに更新することを特徴とする。これにより、車両の走行軌跡において、新規道路を走行した際の軌跡部分を特定することができる。
【0009】
請求項3に記載の道路更新装置は、自車位置検出部にて、少なくとも自車方向を検出する自車方向検出部を備え、自車方向検出部から出力される情報に基づいて推測航法により自車位置を検出し、累積誤差算出手段は、新規道路に相当する走行軌跡に、この新規道路を自車両が走行している間に累積される、自車方向検出部から出力される情報に含まれるオフセット電圧により生じる累積方向誤差を算出することを特徴とする。これにより、例えば、ジャイロセンサ等といった自車方向を検出する機器に生じるオフセット電圧により新規道路に相当する走行軌跡に累積される誤差を算出し、その累積誤差を補正することができる。従って、ジャイロセンサ等の機器にオフセット電圧による誤差が生じている場合においても、より実際の道路の形状に即するようにして走行軌跡を新規道路として更新することが可能となる。
【0010】
請求項4に記載の道路更新装置は、誤差補正手段にて、累積方向誤差算出手段により算出される累積方向誤差が、新規道路に相当する走行軌跡の距離に比例するものとして、新規道路に相当する走行軌跡に累積される方向誤差を補正することを特徴とする。これにより、新規道路に相当する走行軌跡に累積される方向誤差を補正できるため、より実際の道路の形状に即するようにして走行軌跡を新規道路として更新することが可能となる。
【0011】
請求項5に記載の道路更新装置は、自車位置検出部にて、自車が所定距離移動する度に推測航法により自車位置を検出し、誤差補正手段は、積方向誤差算出手段により算出される累積方向誤差と、新規道路に相当する走行軌跡を車両が走行する間に自車位置検出部にて検出される自車位置の検出回数とに基づいて単位方向誤差を算出し、この算出された単位方向誤差に基づいて累積方向誤差を補正することを特徴とする。これにより、新規道路に相当する走行軌跡に累積される方向誤差を補正できるため、より実際の道路の形状に即するようにして走行軌跡を新規道路として更新することが可能となる。
【0012】
請求項6に記載の道路更新装置は、自車位置検出部にて、走行距離を検出する走行距離検出部を備え、この走行距離検出部から出力される情報を用いた推測航法により自車位置を検出し、累積誤差算出手段にて、新規道路に相当する走行軌跡に含まれる前記方向累積誤差が補正された後の軌跡に累積される、走行距離検出部から出力される情報に含まれるオフセット電圧により生じる累積距離誤差を算出し、誤差補正手段にて、新規道路に相当する走行軌跡に含まれる累積方向誤差を補正した後の軌跡を回転・拡大縮小することにより、累積距離誤差を補正することを特徴とする。これにより、車両方向を検出する機器にオフセット電圧による誤差が生じている場合だけでなく、走行距離を検出する機器に生じるオフセット電圧により新規道路に相当する走行軌跡に累積される距離誤差を算出し、その累積誤差を補正することができる。従って、より実際の道路の形状に即するようにして走行軌跡を新規道路として更新することが可能となる。
【図面の簡単な説明】
【0013】
【図1】本実施例におけるカーナビゲーション装置の全体構成を示すブロック図である。
【図2】本実施例における新規道路を走行する際の車両の軌跡に生じる誤差を示した説明図である。
【図3】本実施例における新規道路可能性軌跡に生じる誤差の補正処理を示した説明図である。
【図4】本実施例における道路学習処理を示した説明図である。
【図5】本実施例における道路学習処理を示すフローチャートである。
【図6】本実施例における補正処理サブルーチンを示すフローチャートである。
【図7】推測航法による走行軌跡を利用した従来の道路学習を示した説明図である。
【発明を実施するための形態】
【0014】
以下に本発明の実施例について図面を用いて説明する。なお、本実施例では、本発明の道路学習装置を車両に搭載されるカーナビゲーション装置に適用した例について説明する。また、本発明は、下記の実施例に限定されることなく、本発明の技術的範囲に存在する限り、様々な形態を取り得る。
(実施例)
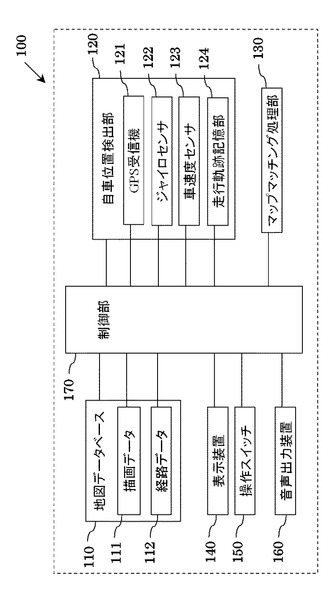
図1は本実施例のカーナビゲーション装置100の概略構成を示すブロック図である。カーナビゲーション装置100は、地図データベース110と、自車位置検出部120と、マップマッチング処理部130と、表示装置140と、操作スイッチ150と、音声出力装置160と、制御部170とを備えている。
【0015】
地図データベース110には、表示装置140に地図を描画するために地図情報をユニット化した描画データ111、経路探索等に用いる経路データ112、及び、図示しなかったが案内用の画像や音声データが格納されている。なお、地図データベース110の記憶媒体としては、ROM(Read Only Memoly)、ハードディスク、メモリ等を用いることができる。
【0016】
描画データ111には、道路や線路、建造物、私有地等といった施設のポリゴンデータや、海や河川等の地形を描画するための背景データ、及び、地図上に存在する各種施設に対するそれぞれの位置情報等を記憶する施設データが記憶されている。
【0017】
経路データ112には、道路地図情報が、接続点を示すノードと、このノード間を接続するリンクからなるネットワーク情報として記憶されている。各道路及び交差点に該当するリンク及びノードには、例えば、各リンクやノードに付与された識別番号や、高速道路、有料道路、主要幹線道路、細街路等の道路種別、右左折禁止、一方通行、制限速度等の交通規制、幅員の広狭、車線数の多寡数、勾配、道路の形状等の情報が付与されている。そして、各リンク、及びノードにはそれら情報に基づきコストが設定されている。この経路データ112に基づいて、制御部170が周知のダイクストラ法等を用いて最適な経路計算を行う。
【0018】
自車位置検出部120は、GPS受信機121、ジャイロセンサ122、車速度センサ123、走行軌跡記憶部124を備える。GPS受信機は121、GPS(Global Positioning System)の衛星からの送信電波を、GPSアンテナを介して受信することで自車位置情報(経度・緯度情報)と現在時刻情報を検知する。ジャイロセンサ122は、車両に加えられる回転運動の大きさを検知し車両の移動方向を算出する。速度センサ123は、車両の速度を検知する。なお、各センサ等121乃至123は、それぞれが特有の誤差を有する。
【0019】
自車位置検出部120は、これらセンサ等121乃至123から出力される信号に基づいて、推測航法により自車位置及び自車の走行軌跡を算出する。具体的には、GPS受信機121にて検知された自車位置情報に基づいて算出される車両が移動した距離、速度センサ123により検知された車速度、ジャイロセンサ122により検知された移動方向とに基づいて、相対的な自車位置を所定区間(例えば、2メートル)毎に検出する。車両が2メートル移動する毎に検出した自車位置をつなぎ合わせることで、自車の走行軌跡を算出する。この推測航法により走行軌跡を算出する際、各センサは互いに補完しながら自車位置の検出を行うように構成されている。ところが、ジャイロセンサが有する電圧オフセットによる誤差は補完されないため、推測航法により算出される自車の走行軌跡は、走行距離が長くなるほどにその誤差が累積され、実際の走行軌跡と推測航法により算出される走行軌跡との間の歪みは大きくなる。なお、自車位置検出部120は、上述したセンサの他に、地磁気から進行方位を検出するための地磁気センサ等を加えて構成されてもよい。
【0020】
走行軌跡記憶部124は、上述の推測航法により算出された自車の走行軌跡を記憶する。また、走行軌跡記憶部124は、マップマッチング処理部130にてマップマッチングが不可能な状態となった場合における自車の走行軌跡を、新規道路可能性軌跡として記憶する。
【0021】
マップマッチング処理部130では、走行経路記憶部124に記憶される推測航法により算出された自車の走行軌跡と、地図データベース110に記憶される地図上の道路が該当するリンクの形状とを照合し、自車位置を地図の道路上に位置付け(マップマッチング)する。具体的には、自車の走行軌跡における、現在の地点から所定区間(例えば、30メートル)遡った地点から現在の地点までの走行軌跡の形状と、GPS受信機121により検知される自車位置(経度・緯度情報)近辺の地図上に存在する各道路が該当するリンクの形状とを照合し、最も相関が高くなるリンクを有する道路を、車両が走行している道路として推定する。自車の走行軌跡の形状と、各道路の形状とを比較して、全ての道路において相関が、定められた閾値よりも低くなった場合は、車両は地図データベース110に記憶される道路を走行していないとして、マップマッチングが不可能な状態となる。なお、自車位置がマップマッチングされた道路上の各地点の位置情報(経度・緯度情報)は、マップマッチング履歴情報として記憶される。
【0022】
表示装置140は、カラー表示可能な液晶ディスプレイからなる。表示装置140の表示画面には、描画データ111に記憶されている背景データ、ポリゴンデータ等から構成される地図と、車両の現在位置を示すマークや、目的地までの誘導経路等がその地図に重ねて表示される。なお、各種施設の記号情報、名称、目印、渋滞情報等を地図に重ねて表示させてもよい。表示装置としては、液晶ディスプレイ以外にも、プラズマディスプレイ、有機ELディスプレイ等があるが、その何れを用いてもよい。
【0023】
操作スイッチ150は、表示装置140と一体に構成され、表示画面上に設置されるタッチパネル及び表示装置140の周囲に設けられた釦スイッチ等が用いられる。なおタッチパネルと表示装置140とは積層一体化されており、タッチパネルには、感圧方式、電磁誘導方式、静電容量方式、あるいはこれらを組み合わせた方式などがあるが、何れを用いてもよい。
【0024】
音声出力装置160は、スピーカーから成り、地図データベース110に記憶されている案内用の音声データ等に基づいて各種案内の音声を出力する。
【0025】
制御部170は、CPU、ROM、RAM、I/O及びこれらの構成を接続するバスライン等からなる周知のマイクロコンピュータを中心に構成されている。そして、ROM等に記憶されたプログラムに基づいて、操作スイッチ150による操作によって指示された範囲の地図等を表示装置140に表示する地図表示処理、現在位置から目的地までの最適な経路を自動的に計算して、経路案内を行う経路案内処理等を行う。
【0026】
なお、上記実施例における構成と特許請求の範囲の構成との対応関係について説明する。地図データベース110は地図データベース、自車位置検出部120は自車位置検出部、マップマッチング処理部130は新規道路走行判定手段に相当する。また、制御部170は、新規道路更新手段、累積誤差算出手段、及び累積誤差補正手段に相当する。
【0027】
続いて、制御部170で実行される、マップマッチングが不可能であった場合の走行軌跡(新規道路可能性軌跡)を、新たな道路として地図データベース110に更新する道路学習処理について説明する。
【0028】
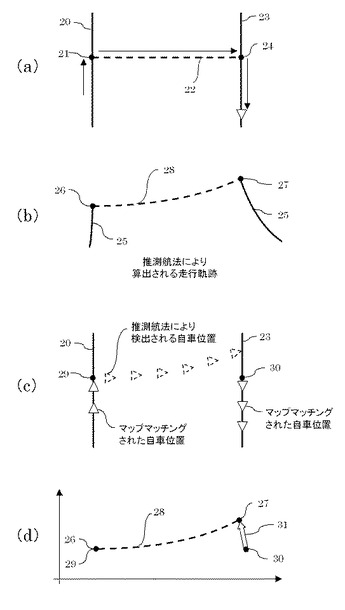
まず、新規道路可能性軌跡に生じる誤差について図2(a)乃至(d)を用いて説明する。図2(a)は、車両が既存道路20から新規交差点21にて離脱して新規道路22を走行し、新規道路22ともう1つの既存道路23との新規交差点24にて既存道路23に復帰するように走行した場合を示している。
【0029】
図2(b)は、図2(a)に矢印で示した経路を車両が走行した場合に、走行軌跡記憶部124に記憶される自車の走行軌跡を示している。自車の走行軌跡は、2メートル毎に推測航法にて検出された自車位置をつなぎ合わせた軌跡である。図2(a)における車両が実際に走行した経路と、図2(b)における推測航法に基づく自車の走行軌跡とを比較しても分かるように、推測航法に基づく自車の走行軌跡には、その形状に誤差が生じている。これは、ジャイロセンサ122の電圧オフセットにより車両の進行方向に対して一定の誤差が生じているためである。また、図2(b)において、自車の走行軌跡における実線はマップマッチングが可能であった走行軌跡25を示し、破線部分はマップマッチングが不可能であった走行軌跡(新規道路可能性軌跡28)を示している。マップマッチングが不可能であった走行軌跡の始点26は、マップマッチングが不可能となったタイミングにおける自車の走行軌跡上の点である。一方、終点27は、マップマッチングが再度可能となったタイミングにおける自車の走行軌跡上に検出される点である。自車の走行軌跡上における始点26及び終点27の区間の走行軌跡は、新規道路可能性軌跡28として走行軌跡記憶部124に記憶される。
【0030】
続いて、図2(c)は、図2(a)に矢印で示した経路を車両が走行した場合に、表示装置140に表示される表示画面を示している。既存道路20を走行している間はマップマッチング可能であるため、自車位置は地図の道路上に位置決めされる。ところが、新規交差点21に該当する離脱地点29から既存道路20を離脱し、新規道路22を走行している間は、車両は地図データベース110に記憶される道路を走行していないとして、マップマッチングが不可能な状態となる。従って、その間の自車位置は、推測航法により検出される自車位置が地図上に表示される。また、新規交差点24に該当する復帰地点30にて、既存道路23に復帰し、既存道路23を走行している間は、マップマッチング可能であるため、自車位置は地図の道路上に位置決めされる。このとき、離脱地点29は、既存道路20に該当するリンク上の地点となる。新規道路を地図データベース110に更新する場合、この離脱地点29は、新規交差点21に該当するノードとして地図データベース110に更新される。同様に、復帰地点30は、新規交差点24に該当するノードとして地図データベース110に更新される。
【0031】
そして、図2(d)は、離脱地点29、復帰地点30、及び、新規道路可能性軌跡28を同一平面座標上にプロットした図である。このとき、新規道路可能性軌跡28における始点26と、離脱地点29とが一致するように座標上にプロットする。また、離脱地点29にてマップマッチングが不可能となる直前のタイミングにおいて、推測航法により算出された軌跡における自車の進行方向と、実際の車両の進行方向との角度差が0度となるように平面座標上に新規道路可能性軌跡28をプロットする。実際の車両の進行方向は、車両が走行していた既存道路20に該当するリンクの向きに基づいて求められる。この平面座標上における終点27と復帰地点30とのズレが累積誤差31となる。
【0032】
次に、本実施例における新規道路可能性軌跡28に生じる誤差を補正するための処理について、図3(a)乃至(e)、図4(a)及び(b)を用いて説明する。まず、自車が新規道路可能性軌跡28を走行する間に累積される、ジャイロセンサ122の電圧オフセットによる自車の進行方向に生じている累積方向誤差を算出する。具体的には、累積方向誤差は、復帰地点30にて再度マップマッチングが可能となった直後のタイミングにおいて、図3(a)に示した推測航法により算出された軌跡における自車の進行方向40と、図3(b)に示した実際の車両の進行方向41との角度差から算出可能である。図3(c)は、その角度差42を示しており、この角度差42が、自車が新規道路可能性軌跡28を走行する間に累積される累積方向誤差となる。
【0033】
次に、図3(d)は、推測航法により所定区間(例えば、2メートル)毎に検出された自車位置32を示しており、それらをつなぎ合わせることにより新規道路可能性軌跡28となる。自車位置32の2点間をつなぐ軌跡33各々には、ジャイロセンサ122の電圧オフセットにより、一定の単位角度誤差θ34が生じている。従って、新規道路可能性軌跡28の距離が長くなるほど(自車位置32の検出点数が多くなるほど)単位角度誤差34が累積する累積方向誤差(角度差42)は比例して大きくなる。単位角度誤差34により車両の進行方向に誤差が生じるために車両の走行軌跡に累積される誤差が図2(d)における累積誤差31となる。
【0034】
ここで、新規道路可能性軌跡28がN個の自車位置32(軌跡点数)の集合であった場合、自車位置32の2点間をつなぐ軌跡33にはそれぞれに一定の単位角度誤差θ34が生じているため、累積角度誤差(角度差42)をNで割ることにより、単位角度誤差34の角度θを算出することができる。そして、単位角度誤差θ34を算出した後に、図3(e)に示すように、1番目からN−1番目の自車位置32の2点間をつなぐ軌跡33の誤差を回帰的に取り除いていくことで、誤差を補正する。
【0035】
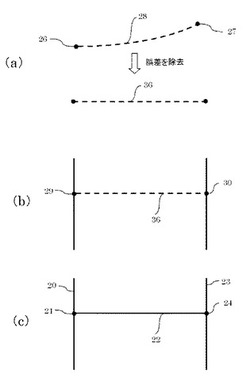
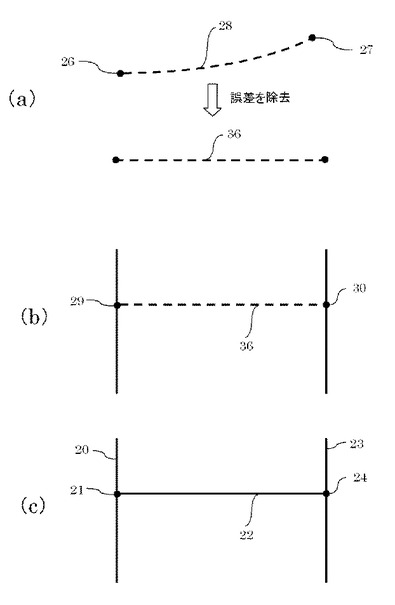
新規道路可能性軌跡28は上述した補正により含まれる誤差が除去され、図4(a)に示すように、更新用軌跡36として実際の道路形状のように補正される。この誤差が取り除かれた更新用軌跡36は、図4(b)に示すように、その始点及び終点が、地図上における離脱地点29及び復帰地点30に一致するように、その形状を回転、拡大縮小して補正される(以後、アフィン変換と呼ぶ)。
【0036】
そして、更新用軌跡36は、図4(c)に示すように、新規交差点21に該当するノード及び新規交差点24に該当するノードに接続する新規道路22に該当するリンクとして地図データベース110に更新される。また、そのリンクには、新規道路22の形状を地図上にて表現するための情報が併せて記憶される。具体的には、更新用軌跡36を所定の分解能毎(例えば、30メートル毎)における形状点を検出し、その情報がリンク情報として記憶される。なお、更新用軌跡36の形状がカーブしている場合、長距離である場合等は、新規道路に該当するリンクを複数設定してもよく、その複数のリンク同士を接続するノードを新たに作成する。
【0037】
続いて、上述した道路学習処理について、図5及び6のフローチャートを参照して説明する。なお、本フローチャートに示す処理は、制御部170に記憶されているコンピュータプログラムに従って実行される。
【0038】
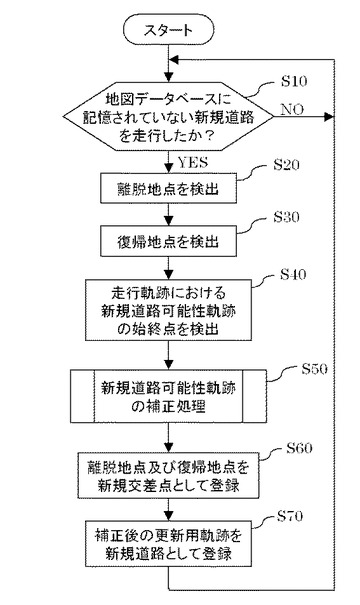
まず、本処理はイグニッションキーをオンすると開始される。初めに、ステップS10において、地図データベース110に記憶されていない新規道路を車両が走行したか否かを判定する。具体的な判定手段は、マップマッチング可能な状態からマップマッチングが不可能な経路を走行し、その後に再度マップマッチング可能となった場合に、車両が新規道路を走行したと判定する。このとき、マップマッチング不可能な経路を走行中の車両の平均速度、走行距離、また車外を撮像する映像等に基づいて、車両が新規道路を走行したか否かを判定するとよい。例えば、平均速度が遅い場合、走行距離が短い場合等は道路ではなく、施設内等を走行している可能性が高いため、このような場合は、車両が新規道路を走行したと判定することはない。車両が新規道路を走行したと判定された場合(ステップS10:YES)、ステップS20に移行する。ステップS10では、車両が新規道路を走行したと判定されるまで自己遷移を繰り返す。
【0039】
ステップS20では、マップマッチング処理部130に記憶される自車位置がマップマッチング不可能となった離脱地点29の位置情報を検出する。ステップS30では、マップマッチング処理部130に記憶される自車位置が再度マップマッチング可能となった復帰地点30の位置情報を検出する。
【0040】
ステップS40では、走行軌跡記憶部124に記憶される推測航法に基づく走行軌跡において、マップマッチングが不可能であった走行軌跡(新規道路可能性軌跡28)の始終点を検出する。
【0041】
ステップS50では、新規道路可能性軌跡28の補正処理サブルーチンを実行する。新規道路可能性軌跡28の補正処理サブルーチンの説明については後述する。
【0042】
ステップS60では、離脱地点29及び復帰地点30をそれぞれの位置情報に基づいて、新規交差点として地図データベース110に登録する。新規交差点は新規道路に該当するリンクと既存道路に該当するリンクとが接続されるノードとして地図データベース110に登録される。
【0043】
ステップS70では、ステップS50における補正処理後の更新用軌跡36を新規道路として地図データベース110に登録する。新規道路は新規交差点に該当するノード間を接続するリンクとして、その形状を保持して地図データベース110に登録される。
【0044】
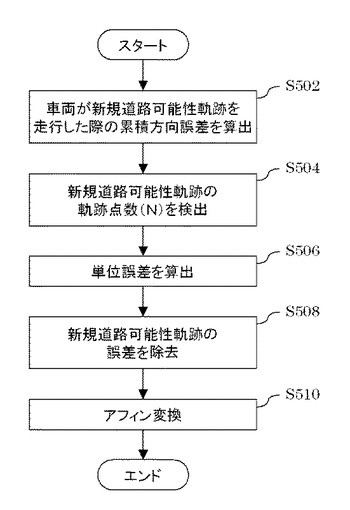
次に、ステップS50における新規道路可能性軌跡28の補正処理サブルーチンについて図7を参照して説明する。新規道路可能性軌跡28の補正処理サブルーチンが開始すると、ステップS502において、車両が新規道路可能性軌跡28を走行した際に生じた累積方向誤差を算出する。累積方向誤差を算出方法については上記にて説明した通りである。
【0045】
ステップS504では、新規道路可能性軌跡28の軌跡点数(N)を検出する。ステップS506では、ステップS502にて算出された累積方向誤差をステップS504にて検出されたNにて割ることにより、単位角度誤差34を算出する。ステップS508では、ステップS506にて算出された単位角度誤差34に基づいて新規道路可能性軌跡28に含まれる誤差を除去する。誤差の除去方法については上記にて説明した通りである。
【0046】
ステップS510では、ステップS508にて誤差を取り除いた軌跡の始点及び終点が、離脱地点29及び復帰地点30に一致するようにアフィン変換(誤差を取り除いた軌跡の形状を回転、拡大縮小)を行う。
【0047】
以上のように本実施例によれば、新規道路の更新を行う場合、新規道路の形状が推測航法による連続的な走行軌跡に基づくため、道路らしく滑らかな形状となりユーザーに違和感を生じさせることはない。また、新規道路を走行した際の推測航法による新規道路可能性軌跡28に含まれるジャイロセンサ122のオフセット電圧により生じる誤差を取り除くことにより、実際の新規道路の形状に、より即するように新規道路の更新を行うことができる。
【0048】
また、本実施例においては、新規道路可能性軌跡28に含まれる誤差はジャイロセンサ122のオフセット電圧により生じる方向誤差のみとした。しかしながら、新規道路可能性軌跡28に、方向誤差だけでなく距離に一定の誤差が含まれている場合においても本実施例と同様の処理にて取り除くことが可能である。例えば、GPS受信機121のオフセット電圧により生じる走行距離の誤差は、図5におけるステップS508にて方向誤差を取り除いた軌跡に対して、その始点及び終点が、離脱地点29及び復帰地点30に一致するようにアフィン変換(誤差を取り除いた軌跡の形状を回転、拡大縮小)を行う際に除去される。
【符号の説明】
【0049】
100 カーナビゲーション装置
110 地図データベース
120 自車位置検出部
130 マップマッチング処理部
170 制御部
20、23 既存道路
21、24 新規交差点
22 新規道路
28 新規道路可能性軌跡
29 離脱地点
30 復帰地点
31 累積誤差
36 更新用軌跡
【技術分野】
【0001】
本発明は、道路地図データに記憶されていない道路を移動した際に、その軌跡を利用して、新たな道路を地図データに登録する道路学習装置に関する。
【背景技術】
【0002】
従来、新しく開通された道路等、既存の地図データに記憶されていない道路を車両が走行した場合に、その道路を地図データに自動的に変更、修正、追加等を行うことで既存の地図データを更新する技術が知られている。例えば、特許文献1に記載の技術では、新規道路を車両が走行した際の推測航法に基づく車両の走行軌跡を、地図データにおける新規道路が存在する始端地点と終端地点との間にはめ込むように、走行軌跡の形状を回転・拡大縮小することにより新規道路を学習し、地図データの更新を行っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−201392号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、推測航法に基づく走行軌跡は、車両の走行距離及び車両進行方向に基づいて走行軌跡を算出するため、その形状は道路らしく滑らかな軌跡となるものの、車両進行方向を検出するためのジャイロセンサから発生する電圧オフセットの影響により、走行距離が長くなればなるほど、その誤差が累積される。そのため、図7(a)に示すように、車両の走行軌跡は実際の新規道路とは異なった形状となり、その結果、実際の新規道路と既存道路との接続地点と、車両の走行軌跡が既存道路に復帰する復帰地点との間にズレが生じてしまう。そして、特許文献1に記載のように地図データの更新を行うと、推測航法による誤差を考慮することなく、新規道路が存在する始端地点と終端地点との間にはめ込むように新規道路を学習するため、図7(b)に示すように、新規道路として学習する道路軌跡は実際の新規道路の形状と大きくずれてしまうといった問題があった。
【0005】
そこで、本発明は上記問題に鑑みてなされたものであり、推測航法に基づく車両の走行軌跡を新規道路として地図データに更新する際に、より実際の道路の形状に即するように新規道路の学習を行う道路学習装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、請求項1に記載の発明は、道路地図を記憶する地図データベースと、推測航法により自車両の位置を検出する自車位置検出部と、自車位置検出部により検出される自車位置が移動する走行軌跡を記憶する走行軌跡記憶部と、自車両が、地図データベース上に記憶されていない新規道路を走行していたか否かを判定する新規道路走行判定手段と、新規道路走行判定手段により、自車両が新規道路を走行していたと判定した場合に、走行軌跡記憶部に記憶される自車両の走行軌跡を新規道路として地図データベースに更新する新規道路更新手段とを備える道路学習装置であって、新規道路走行判定手段により、自車両が新規道路を走行していたと判定した場合に、自車両が、新規道路に相当する走行軌跡に、この新規道路を自車両が走行している間に累積される誤差を算出する累積誤差算出手段と、累積誤差算出手段により算出される累積誤差を補正する累積誤差補正手段とをさらに備え、新規道路更新手段にて、累積誤差補正手段により補正された後の走行軌跡を新規道路として地図データベースに更新することを特徴とする。
【0007】
請求項1に記載の発明によれば、自車が走行した新規道路に相当する走行軌跡を新たな道路として地図データに更新する際に、新規道路に相当する走行軌跡を車両が走行する間に新規道路に相当する走行軌跡に累積される誤差を算出し、その累積誤差を補正する。これにより、より実際の道路の形状に即するようにして走行軌跡を新規道路として更新することが可能となる。
【0008】
請求項2に記載の道路更新装置は、新規道路更新手段にて、新規道路走行判定手段により自車両が新規道路を走行し始めたと判定されるタイミングにおける走行軌跡上の点を始点とし、新規道路走行判定手段により自車両が新規道路を走行し終えたと判定されるタイミングにおける走行軌跡上の点を終点とし、始点及び前記終点の区間の走行軌跡を新規道路として前記地図データベースに更新することを特徴とする。これにより、車両の走行軌跡において、新規道路を走行した際の軌跡部分を特定することができる。
【0009】
請求項3に記載の道路更新装置は、自車位置検出部にて、少なくとも自車方向を検出する自車方向検出部を備え、自車方向検出部から出力される情報に基づいて推測航法により自車位置を検出し、累積誤差算出手段は、新規道路に相当する走行軌跡に、この新規道路を自車両が走行している間に累積される、自車方向検出部から出力される情報に含まれるオフセット電圧により生じる累積方向誤差を算出することを特徴とする。これにより、例えば、ジャイロセンサ等といった自車方向を検出する機器に生じるオフセット電圧により新規道路に相当する走行軌跡に累積される誤差を算出し、その累積誤差を補正することができる。従って、ジャイロセンサ等の機器にオフセット電圧による誤差が生じている場合においても、より実際の道路の形状に即するようにして走行軌跡を新規道路として更新することが可能となる。
【0010】
請求項4に記載の道路更新装置は、誤差補正手段にて、累積方向誤差算出手段により算出される累積方向誤差が、新規道路に相当する走行軌跡の距離に比例するものとして、新規道路に相当する走行軌跡に累積される方向誤差を補正することを特徴とする。これにより、新規道路に相当する走行軌跡に累積される方向誤差を補正できるため、より実際の道路の形状に即するようにして走行軌跡を新規道路として更新することが可能となる。
【0011】
請求項5に記載の道路更新装置は、自車位置検出部にて、自車が所定距離移動する度に推測航法により自車位置を検出し、誤差補正手段は、積方向誤差算出手段により算出される累積方向誤差と、新規道路に相当する走行軌跡を車両が走行する間に自車位置検出部にて検出される自車位置の検出回数とに基づいて単位方向誤差を算出し、この算出された単位方向誤差に基づいて累積方向誤差を補正することを特徴とする。これにより、新規道路に相当する走行軌跡に累積される方向誤差を補正できるため、より実際の道路の形状に即するようにして走行軌跡を新規道路として更新することが可能となる。
【0012】
請求項6に記載の道路更新装置は、自車位置検出部にて、走行距離を検出する走行距離検出部を備え、この走行距離検出部から出力される情報を用いた推測航法により自車位置を検出し、累積誤差算出手段にて、新規道路に相当する走行軌跡に含まれる前記方向累積誤差が補正された後の軌跡に累積される、走行距離検出部から出力される情報に含まれるオフセット電圧により生じる累積距離誤差を算出し、誤差補正手段にて、新規道路に相当する走行軌跡に含まれる累積方向誤差を補正した後の軌跡を回転・拡大縮小することにより、累積距離誤差を補正することを特徴とする。これにより、車両方向を検出する機器にオフセット電圧による誤差が生じている場合だけでなく、走行距離を検出する機器に生じるオフセット電圧により新規道路に相当する走行軌跡に累積される距離誤差を算出し、その累積誤差を補正することができる。従って、より実際の道路の形状に即するようにして走行軌跡を新規道路として更新することが可能となる。
【図面の簡単な説明】
【0013】
【図1】本実施例におけるカーナビゲーション装置の全体構成を示すブロック図である。
【図2】本実施例における新規道路を走行する際の車両の軌跡に生じる誤差を示した説明図である。
【図3】本実施例における新規道路可能性軌跡に生じる誤差の補正処理を示した説明図である。
【図4】本実施例における道路学習処理を示した説明図である。
【図5】本実施例における道路学習処理を示すフローチャートである。
【図6】本実施例における補正処理サブルーチンを示すフローチャートである。
【図7】推測航法による走行軌跡を利用した従来の道路学習を示した説明図である。
【発明を実施するための形態】
【0014】
以下に本発明の実施例について図面を用いて説明する。なお、本実施例では、本発明の道路学習装置を車両に搭載されるカーナビゲーション装置に適用した例について説明する。また、本発明は、下記の実施例に限定されることなく、本発明の技術的範囲に存在する限り、様々な形態を取り得る。
(実施例)
図1は本実施例のカーナビゲーション装置100の概略構成を示すブロック図である。カーナビゲーション装置100は、地図データベース110と、自車位置検出部120と、マップマッチング処理部130と、表示装置140と、操作スイッチ150と、音声出力装置160と、制御部170とを備えている。
【0015】
地図データベース110には、表示装置140に地図を描画するために地図情報をユニット化した描画データ111、経路探索等に用いる経路データ112、及び、図示しなかったが案内用の画像や音声データが格納されている。なお、地図データベース110の記憶媒体としては、ROM(Read Only Memoly)、ハードディスク、メモリ等を用いることができる。
【0016】
描画データ111には、道路や線路、建造物、私有地等といった施設のポリゴンデータや、海や河川等の地形を描画するための背景データ、及び、地図上に存在する各種施設に対するそれぞれの位置情報等を記憶する施設データが記憶されている。
【0017】
経路データ112には、道路地図情報が、接続点を示すノードと、このノード間を接続するリンクからなるネットワーク情報として記憶されている。各道路及び交差点に該当するリンク及びノードには、例えば、各リンクやノードに付与された識別番号や、高速道路、有料道路、主要幹線道路、細街路等の道路種別、右左折禁止、一方通行、制限速度等の交通規制、幅員の広狭、車線数の多寡数、勾配、道路の形状等の情報が付与されている。そして、各リンク、及びノードにはそれら情報に基づきコストが設定されている。この経路データ112に基づいて、制御部170が周知のダイクストラ法等を用いて最適な経路計算を行う。
【0018】
自車位置検出部120は、GPS受信機121、ジャイロセンサ122、車速度センサ123、走行軌跡記憶部124を備える。GPS受信機は121、GPS(Global Positioning System)の衛星からの送信電波を、GPSアンテナを介して受信することで自車位置情報(経度・緯度情報)と現在時刻情報を検知する。ジャイロセンサ122は、車両に加えられる回転運動の大きさを検知し車両の移動方向を算出する。速度センサ123は、車両の速度を検知する。なお、各センサ等121乃至123は、それぞれが特有の誤差を有する。
【0019】
自車位置検出部120は、これらセンサ等121乃至123から出力される信号に基づいて、推測航法により自車位置及び自車の走行軌跡を算出する。具体的には、GPS受信機121にて検知された自車位置情報に基づいて算出される車両が移動した距離、速度センサ123により検知された車速度、ジャイロセンサ122により検知された移動方向とに基づいて、相対的な自車位置を所定区間(例えば、2メートル)毎に検出する。車両が2メートル移動する毎に検出した自車位置をつなぎ合わせることで、自車の走行軌跡を算出する。この推測航法により走行軌跡を算出する際、各センサは互いに補完しながら自車位置の検出を行うように構成されている。ところが、ジャイロセンサが有する電圧オフセットによる誤差は補完されないため、推測航法により算出される自車の走行軌跡は、走行距離が長くなるほどにその誤差が累積され、実際の走行軌跡と推測航法により算出される走行軌跡との間の歪みは大きくなる。なお、自車位置検出部120は、上述したセンサの他に、地磁気から進行方位を検出するための地磁気センサ等を加えて構成されてもよい。
【0020】
走行軌跡記憶部124は、上述の推測航法により算出された自車の走行軌跡を記憶する。また、走行軌跡記憶部124は、マップマッチング処理部130にてマップマッチングが不可能な状態となった場合における自車の走行軌跡を、新規道路可能性軌跡として記憶する。
【0021】
マップマッチング処理部130では、走行経路記憶部124に記憶される推測航法により算出された自車の走行軌跡と、地図データベース110に記憶される地図上の道路が該当するリンクの形状とを照合し、自車位置を地図の道路上に位置付け(マップマッチング)する。具体的には、自車の走行軌跡における、現在の地点から所定区間(例えば、30メートル)遡った地点から現在の地点までの走行軌跡の形状と、GPS受信機121により検知される自車位置(経度・緯度情報)近辺の地図上に存在する各道路が該当するリンクの形状とを照合し、最も相関が高くなるリンクを有する道路を、車両が走行している道路として推定する。自車の走行軌跡の形状と、各道路の形状とを比較して、全ての道路において相関が、定められた閾値よりも低くなった場合は、車両は地図データベース110に記憶される道路を走行していないとして、マップマッチングが不可能な状態となる。なお、自車位置がマップマッチングされた道路上の各地点の位置情報(経度・緯度情報)は、マップマッチング履歴情報として記憶される。
【0022】
表示装置140は、カラー表示可能な液晶ディスプレイからなる。表示装置140の表示画面には、描画データ111に記憶されている背景データ、ポリゴンデータ等から構成される地図と、車両の現在位置を示すマークや、目的地までの誘導経路等がその地図に重ねて表示される。なお、各種施設の記号情報、名称、目印、渋滞情報等を地図に重ねて表示させてもよい。表示装置としては、液晶ディスプレイ以外にも、プラズマディスプレイ、有機ELディスプレイ等があるが、その何れを用いてもよい。
【0023】
操作スイッチ150は、表示装置140と一体に構成され、表示画面上に設置されるタッチパネル及び表示装置140の周囲に設けられた釦スイッチ等が用いられる。なおタッチパネルと表示装置140とは積層一体化されており、タッチパネルには、感圧方式、電磁誘導方式、静電容量方式、あるいはこれらを組み合わせた方式などがあるが、何れを用いてもよい。
【0024】
音声出力装置160は、スピーカーから成り、地図データベース110に記憶されている案内用の音声データ等に基づいて各種案内の音声を出力する。
【0025】
制御部170は、CPU、ROM、RAM、I/O及びこれらの構成を接続するバスライン等からなる周知のマイクロコンピュータを中心に構成されている。そして、ROM等に記憶されたプログラムに基づいて、操作スイッチ150による操作によって指示された範囲の地図等を表示装置140に表示する地図表示処理、現在位置から目的地までの最適な経路を自動的に計算して、経路案内を行う経路案内処理等を行う。
【0026】
なお、上記実施例における構成と特許請求の範囲の構成との対応関係について説明する。地図データベース110は地図データベース、自車位置検出部120は自車位置検出部、マップマッチング処理部130は新規道路走行判定手段に相当する。また、制御部170は、新規道路更新手段、累積誤差算出手段、及び累積誤差補正手段に相当する。
【0027】
続いて、制御部170で実行される、マップマッチングが不可能であった場合の走行軌跡(新規道路可能性軌跡)を、新たな道路として地図データベース110に更新する道路学習処理について説明する。
【0028】
まず、新規道路可能性軌跡に生じる誤差について図2(a)乃至(d)を用いて説明する。図2(a)は、車両が既存道路20から新規交差点21にて離脱して新規道路22を走行し、新規道路22ともう1つの既存道路23との新規交差点24にて既存道路23に復帰するように走行した場合を示している。
【0029】
図2(b)は、図2(a)に矢印で示した経路を車両が走行した場合に、走行軌跡記憶部124に記憶される自車の走行軌跡を示している。自車の走行軌跡は、2メートル毎に推測航法にて検出された自車位置をつなぎ合わせた軌跡である。図2(a)における車両が実際に走行した経路と、図2(b)における推測航法に基づく自車の走行軌跡とを比較しても分かるように、推測航法に基づく自車の走行軌跡には、その形状に誤差が生じている。これは、ジャイロセンサ122の電圧オフセットにより車両の進行方向に対して一定の誤差が生じているためである。また、図2(b)において、自車の走行軌跡における実線はマップマッチングが可能であった走行軌跡25を示し、破線部分はマップマッチングが不可能であった走行軌跡(新規道路可能性軌跡28)を示している。マップマッチングが不可能であった走行軌跡の始点26は、マップマッチングが不可能となったタイミングにおける自車の走行軌跡上の点である。一方、終点27は、マップマッチングが再度可能となったタイミングにおける自車の走行軌跡上に検出される点である。自車の走行軌跡上における始点26及び終点27の区間の走行軌跡は、新規道路可能性軌跡28として走行軌跡記憶部124に記憶される。
【0030】
続いて、図2(c)は、図2(a)に矢印で示した経路を車両が走行した場合に、表示装置140に表示される表示画面を示している。既存道路20を走行している間はマップマッチング可能であるため、自車位置は地図の道路上に位置決めされる。ところが、新規交差点21に該当する離脱地点29から既存道路20を離脱し、新規道路22を走行している間は、車両は地図データベース110に記憶される道路を走行していないとして、マップマッチングが不可能な状態となる。従って、その間の自車位置は、推測航法により検出される自車位置が地図上に表示される。また、新規交差点24に該当する復帰地点30にて、既存道路23に復帰し、既存道路23を走行している間は、マップマッチング可能であるため、自車位置は地図の道路上に位置決めされる。このとき、離脱地点29は、既存道路20に該当するリンク上の地点となる。新規道路を地図データベース110に更新する場合、この離脱地点29は、新規交差点21に該当するノードとして地図データベース110に更新される。同様に、復帰地点30は、新規交差点24に該当するノードとして地図データベース110に更新される。
【0031】
そして、図2(d)は、離脱地点29、復帰地点30、及び、新規道路可能性軌跡28を同一平面座標上にプロットした図である。このとき、新規道路可能性軌跡28における始点26と、離脱地点29とが一致するように座標上にプロットする。また、離脱地点29にてマップマッチングが不可能となる直前のタイミングにおいて、推測航法により算出された軌跡における自車の進行方向と、実際の車両の進行方向との角度差が0度となるように平面座標上に新規道路可能性軌跡28をプロットする。実際の車両の進行方向は、車両が走行していた既存道路20に該当するリンクの向きに基づいて求められる。この平面座標上における終点27と復帰地点30とのズレが累積誤差31となる。
【0032】
次に、本実施例における新規道路可能性軌跡28に生じる誤差を補正するための処理について、図3(a)乃至(e)、図4(a)及び(b)を用いて説明する。まず、自車が新規道路可能性軌跡28を走行する間に累積される、ジャイロセンサ122の電圧オフセットによる自車の進行方向に生じている累積方向誤差を算出する。具体的には、累積方向誤差は、復帰地点30にて再度マップマッチングが可能となった直後のタイミングにおいて、図3(a)に示した推測航法により算出された軌跡における自車の進行方向40と、図3(b)に示した実際の車両の進行方向41との角度差から算出可能である。図3(c)は、その角度差42を示しており、この角度差42が、自車が新規道路可能性軌跡28を走行する間に累積される累積方向誤差となる。
【0033】
次に、図3(d)は、推測航法により所定区間(例えば、2メートル)毎に検出された自車位置32を示しており、それらをつなぎ合わせることにより新規道路可能性軌跡28となる。自車位置32の2点間をつなぐ軌跡33各々には、ジャイロセンサ122の電圧オフセットにより、一定の単位角度誤差θ34が生じている。従って、新規道路可能性軌跡28の距離が長くなるほど(自車位置32の検出点数が多くなるほど)単位角度誤差34が累積する累積方向誤差(角度差42)は比例して大きくなる。単位角度誤差34により車両の進行方向に誤差が生じるために車両の走行軌跡に累積される誤差が図2(d)における累積誤差31となる。
【0034】
ここで、新規道路可能性軌跡28がN個の自車位置32(軌跡点数)の集合であった場合、自車位置32の2点間をつなぐ軌跡33にはそれぞれに一定の単位角度誤差θ34が生じているため、累積角度誤差(角度差42)をNで割ることにより、単位角度誤差34の角度θを算出することができる。そして、単位角度誤差θ34を算出した後に、図3(e)に示すように、1番目からN−1番目の自車位置32の2点間をつなぐ軌跡33の誤差を回帰的に取り除いていくことで、誤差を補正する。
【0035】
新規道路可能性軌跡28は上述した補正により含まれる誤差が除去され、図4(a)に示すように、更新用軌跡36として実際の道路形状のように補正される。この誤差が取り除かれた更新用軌跡36は、図4(b)に示すように、その始点及び終点が、地図上における離脱地点29及び復帰地点30に一致するように、その形状を回転、拡大縮小して補正される(以後、アフィン変換と呼ぶ)。
【0036】
そして、更新用軌跡36は、図4(c)に示すように、新規交差点21に該当するノード及び新規交差点24に該当するノードに接続する新規道路22に該当するリンクとして地図データベース110に更新される。また、そのリンクには、新規道路22の形状を地図上にて表現するための情報が併せて記憶される。具体的には、更新用軌跡36を所定の分解能毎(例えば、30メートル毎)における形状点を検出し、その情報がリンク情報として記憶される。なお、更新用軌跡36の形状がカーブしている場合、長距離である場合等は、新規道路に該当するリンクを複数設定してもよく、その複数のリンク同士を接続するノードを新たに作成する。
【0037】
続いて、上述した道路学習処理について、図5及び6のフローチャートを参照して説明する。なお、本フローチャートに示す処理は、制御部170に記憶されているコンピュータプログラムに従って実行される。
【0038】
まず、本処理はイグニッションキーをオンすると開始される。初めに、ステップS10において、地図データベース110に記憶されていない新規道路を車両が走行したか否かを判定する。具体的な判定手段は、マップマッチング可能な状態からマップマッチングが不可能な経路を走行し、その後に再度マップマッチング可能となった場合に、車両が新規道路を走行したと判定する。このとき、マップマッチング不可能な経路を走行中の車両の平均速度、走行距離、また車外を撮像する映像等に基づいて、車両が新規道路を走行したか否かを判定するとよい。例えば、平均速度が遅い場合、走行距離が短い場合等は道路ではなく、施設内等を走行している可能性が高いため、このような場合は、車両が新規道路を走行したと判定することはない。車両が新規道路を走行したと判定された場合(ステップS10:YES)、ステップS20に移行する。ステップS10では、車両が新規道路を走行したと判定されるまで自己遷移を繰り返す。
【0039】
ステップS20では、マップマッチング処理部130に記憶される自車位置がマップマッチング不可能となった離脱地点29の位置情報を検出する。ステップS30では、マップマッチング処理部130に記憶される自車位置が再度マップマッチング可能となった復帰地点30の位置情報を検出する。
【0040】
ステップS40では、走行軌跡記憶部124に記憶される推測航法に基づく走行軌跡において、マップマッチングが不可能であった走行軌跡(新規道路可能性軌跡28)の始終点を検出する。
【0041】
ステップS50では、新規道路可能性軌跡28の補正処理サブルーチンを実行する。新規道路可能性軌跡28の補正処理サブルーチンの説明については後述する。
【0042】
ステップS60では、離脱地点29及び復帰地点30をそれぞれの位置情報に基づいて、新規交差点として地図データベース110に登録する。新規交差点は新規道路に該当するリンクと既存道路に該当するリンクとが接続されるノードとして地図データベース110に登録される。
【0043】
ステップS70では、ステップS50における補正処理後の更新用軌跡36を新規道路として地図データベース110に登録する。新規道路は新規交差点に該当するノード間を接続するリンクとして、その形状を保持して地図データベース110に登録される。
【0044】
次に、ステップS50における新規道路可能性軌跡28の補正処理サブルーチンについて図7を参照して説明する。新規道路可能性軌跡28の補正処理サブルーチンが開始すると、ステップS502において、車両が新規道路可能性軌跡28を走行した際に生じた累積方向誤差を算出する。累積方向誤差を算出方法については上記にて説明した通りである。
【0045】
ステップS504では、新規道路可能性軌跡28の軌跡点数(N)を検出する。ステップS506では、ステップS502にて算出された累積方向誤差をステップS504にて検出されたNにて割ることにより、単位角度誤差34を算出する。ステップS508では、ステップS506にて算出された単位角度誤差34に基づいて新規道路可能性軌跡28に含まれる誤差を除去する。誤差の除去方法については上記にて説明した通りである。
【0046】
ステップS510では、ステップS508にて誤差を取り除いた軌跡の始点及び終点が、離脱地点29及び復帰地点30に一致するようにアフィン変換(誤差を取り除いた軌跡の形状を回転、拡大縮小)を行う。
【0047】
以上のように本実施例によれば、新規道路の更新を行う場合、新規道路の形状が推測航法による連続的な走行軌跡に基づくため、道路らしく滑らかな形状となりユーザーに違和感を生じさせることはない。また、新規道路を走行した際の推測航法による新規道路可能性軌跡28に含まれるジャイロセンサ122のオフセット電圧により生じる誤差を取り除くことにより、実際の新規道路の形状に、より即するように新規道路の更新を行うことができる。
【0048】
また、本実施例においては、新規道路可能性軌跡28に含まれる誤差はジャイロセンサ122のオフセット電圧により生じる方向誤差のみとした。しかしながら、新規道路可能性軌跡28に、方向誤差だけでなく距離に一定の誤差が含まれている場合においても本実施例と同様の処理にて取り除くことが可能である。例えば、GPS受信機121のオフセット電圧により生じる走行距離の誤差は、図5におけるステップS508にて方向誤差を取り除いた軌跡に対して、その始点及び終点が、離脱地点29及び復帰地点30に一致するようにアフィン変換(誤差を取り除いた軌跡の形状を回転、拡大縮小)を行う際に除去される。
【符号の説明】
【0049】
100 カーナビゲーション装置
110 地図データベース
120 自車位置検出部
130 マップマッチング処理部
170 制御部
20、23 既存道路
21、24 新規交差点
22 新規道路
28 新規道路可能性軌跡
29 離脱地点
30 復帰地点
31 累積誤差
36 更新用軌跡
【特許請求の範囲】
【請求項1】
道路地図を記憶する地図データベースと、
推測航法により自車両の位置を検出する自車位置検出部と、
前記自車位置検出部により検出される自車位置が移動する走行軌跡を記憶する走行軌跡記憶部と、
前記自車両が、前記地図データベース上に記憶されていない新規道路を走行していたか否かを判定する新規道路走行判定手段と、
前記新規道路走行判定手段により、自車両が新規道路を走行していたと判定した場合に、前記走行軌跡記憶部に記憶される自車両の走行軌跡を新規道路として前記地図データベースに更新する新規道路更新手段とを備える道路学習装置であって、
前記新規道路走行判定手段により、自車両が新規道路を走行していたと判定した場合に、前記自車両が、前記新規道路に相当する走行軌跡に該新規道路を自車両が走行している間に累積される誤差を算出する累積誤差算出手段と、
前記累積誤差算出手段により算出される累積誤差を補正する累積誤差補正手段とをさらに備え、
前記新規道路更新手段は、前記累積誤差補正手段により補正された後の走行軌跡を新規道路として前記地図データベースに更新することを特徴とする道路学習装置。
【請求項2】
請求項1に記載の道路学習装置において、
前記新規道路更新手段は、前記新規道路走行判定手段により自車両が新規道路を走行し始めたと判定されるタイミングにおける前記走行軌跡上の点を始点とし、前記新規道路走行判定手段により自車両が新規道路を走行し終えたと判定されるタイミングにおける前記走行軌跡上の点を終点とし、前記始点及び前記終点の区間の走行軌跡を新規道路として前記地図データベースに更新することを特徴とする道路学習装置。
【請求項3】
請求項1若しくは2に記載の道路学習装置において、
前記自車位置検出部は、少なくとも自車方向を検出する自車方向検出部を備え、該自車方向検出部から出力される情報に基づいて推測航法により自車位置を検出し、
前記累積誤差算出手段は、前記新規道路に相当する走行軌跡に、該新規道路を自車両が走行している間に累積される、前記自車方向検出部から出力される情報に含まれるオフセット電圧により生じる累積方向誤差を算出することを特徴とする道路学習装置。
【請求項4】
請求項3に記載の道路学習装置において、
前記誤差補正手段は、前記累積方向誤差算出手段により算出される累積方向誤差が、前記新規道路に相当する走行軌跡の距離に比例するものとして、前記新規道路に相当する走行軌跡に累積される方向誤差を補正することを特徴とする道路学習装置。
【請求項5】
請求項4に記載の道路学習装置において、
前記自車位置検出部は、自車が所定距離移動する度に推測航法により自車位置を検出し、
前記誤差補正手段は、前記累積方向誤差算出手段により算出される累積方向誤差と、前記新規道路に相当する走行軌跡を車両が走行する間に前記自車位置検出部にて検出される自車位置の検出回数とに基づいて単位方向誤差を算出し、該算出された単位方向誤差に基づいて前記累積方向誤差を補正することを特徴とする道路学習装置。
【請求項6】
請求項3乃至5に記載の道路学習装置において、
前記自車位置検出部は、走行距離を検出する走行距離検出部を備え、該走行距離検出部から出力される情報を用いた推測航法により自車位置を検出し、
前記累積誤差算出手段は、前記新規道路に相当する走行軌跡に含まれる前記方向累積誤差が補正された後の軌跡に累積される、前記走行距離検出部から出力される情報に含まれるオフセット電圧により生じる累積距離誤差を算出し、
前記誤差補正手段は、前記新規道路に相当する走行軌跡に含まれる前記累積方向誤差を補正した後の軌跡を回転・拡大縮小することにより、前記累積距離誤差を補正することを特徴とする道路学習装置。
【請求項1】
道路地図を記憶する地図データベースと、
推測航法により自車両の位置を検出する自車位置検出部と、
前記自車位置検出部により検出される自車位置が移動する走行軌跡を記憶する走行軌跡記憶部と、
前記自車両が、前記地図データベース上に記憶されていない新規道路を走行していたか否かを判定する新規道路走行判定手段と、
前記新規道路走行判定手段により、自車両が新規道路を走行していたと判定した場合に、前記走行軌跡記憶部に記憶される自車両の走行軌跡を新規道路として前記地図データベースに更新する新規道路更新手段とを備える道路学習装置であって、
前記新規道路走行判定手段により、自車両が新規道路を走行していたと判定した場合に、前記自車両が、前記新規道路に相当する走行軌跡に該新規道路を自車両が走行している間に累積される誤差を算出する累積誤差算出手段と、
前記累積誤差算出手段により算出される累積誤差を補正する累積誤差補正手段とをさらに備え、
前記新規道路更新手段は、前記累積誤差補正手段により補正された後の走行軌跡を新規道路として前記地図データベースに更新することを特徴とする道路学習装置。
【請求項2】
請求項1に記載の道路学習装置において、
前記新規道路更新手段は、前記新規道路走行判定手段により自車両が新規道路を走行し始めたと判定されるタイミングにおける前記走行軌跡上の点を始点とし、前記新規道路走行判定手段により自車両が新規道路を走行し終えたと判定されるタイミングにおける前記走行軌跡上の点を終点とし、前記始点及び前記終点の区間の走行軌跡を新規道路として前記地図データベースに更新することを特徴とする道路学習装置。
【請求項3】
請求項1若しくは2に記載の道路学習装置において、
前記自車位置検出部は、少なくとも自車方向を検出する自車方向検出部を備え、該自車方向検出部から出力される情報に基づいて推測航法により自車位置を検出し、
前記累積誤差算出手段は、前記新規道路に相当する走行軌跡に、該新規道路を自車両が走行している間に累積される、前記自車方向検出部から出力される情報に含まれるオフセット電圧により生じる累積方向誤差を算出することを特徴とする道路学習装置。
【請求項4】
請求項3に記載の道路学習装置において、
前記誤差補正手段は、前記累積方向誤差算出手段により算出される累積方向誤差が、前記新規道路に相当する走行軌跡の距離に比例するものとして、前記新規道路に相当する走行軌跡に累積される方向誤差を補正することを特徴とする道路学習装置。
【請求項5】
請求項4に記載の道路学習装置において、
前記自車位置検出部は、自車が所定距離移動する度に推測航法により自車位置を検出し、
前記誤差補正手段は、前記累積方向誤差算出手段により算出される累積方向誤差と、前記新規道路に相当する走行軌跡を車両が走行する間に前記自車位置検出部にて検出される自車位置の検出回数とに基づいて単位方向誤差を算出し、該算出された単位方向誤差に基づいて前記累積方向誤差を補正することを特徴とする道路学習装置。
【請求項6】
請求項3乃至5に記載の道路学習装置において、
前記自車位置検出部は、走行距離を検出する走行距離検出部を備え、該走行距離検出部から出力される情報を用いた推測航法により自車位置を検出し、
前記累積誤差算出手段は、前記新規道路に相当する走行軌跡に含まれる前記方向累積誤差が補正された後の軌跡に累積される、前記走行距離検出部から出力される情報に含まれるオフセット電圧により生じる累積距離誤差を算出し、
前記誤差補正手段は、前記新規道路に相当する走行軌跡に含まれる前記累積方向誤差を補正した後の軌跡を回転・拡大縮小することにより、前記累積距離誤差を補正することを特徴とする道路学習装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−145159(P2011−145159A)
【公開日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願番号】特願2010−5896(P2010−5896)
【出願日】平成22年1月14日(2010.1.14)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願日】平成22年1月14日(2010.1.14)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]