
道路形状推定装置
【課題】 不定間隔で存在する路側の立体物を利用して道路形状を精度良く推定する。
【解決手段】 撮像手段Cで自車前方の画像を撮像し、立体物抽出手段M1で画像内に存在する立体物を抽出し、特徴点抽出手段M2で立体が地表面に接する特徴点を抽出し、走行状態検出手段Sで検出した自車の走行状態に応じて特徴点補正手段M3で特徴点の位置ずれを補正し、残像生成手段M4で前記位置ずれ補正後の特徴点と自車の走行状態とから該特徴点の残像を生成し、消失点算出手段M5で相互に対応する特徴点および残像を通る複数の直線が交差する消失点を算出し、道路形状推定手段M6で消失点を通る直線のうちで自車の左右両側に最も近いものに基づいて道路形状を推定するので、道路に白線が存在しない場合や、立体物がまばらな場合であっても、道路形状を精度良く推定することができる。
【解決手段】 撮像手段Cで自車前方の画像を撮像し、立体物抽出手段M1で画像内に存在する立体物を抽出し、特徴点抽出手段M2で立体が地表面に接する特徴点を抽出し、走行状態検出手段Sで検出した自車の走行状態に応じて特徴点補正手段M3で特徴点の位置ずれを補正し、残像生成手段M4で前記位置ずれ補正後の特徴点と自車の走行状態とから該特徴点の残像を生成し、消失点算出手段M5で相互に対応する特徴点および残像を通る複数の直線が交差する消失点を算出し、道路形状推定手段M6で消失点を通る直線のうちで自車の左右両側に最も近いものに基づいて道路形状を推定するので、道路に白線が存在しない場合や、立体物がまばらな場合であっても、道路形状を精度良く推定することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、所定の時間間隔で自車前方の画像を撮像する撮像手段と、前記画像内に存在する立体物を抽出する立体物抽出手段と、前記立体物に基づいて道路形状を推定する道路形状推定手段とを備えた道路形状推定装置に関する。
【背景技術】
【0002】
例えばテレビカメラで撮像した自車前方の画像から道路の白線を検出し、左右の白線に挟まれたレーンから自車が逸脱しないように運転者のステアリング操作をアシストするレーンキーピングシステムが知られている。
【0003】
また路側に沿って等間隔で配置された円形反射板を有する標識(デリニエータ)を車載のテレビカメラで撮像することで、自車前方の道路形状や道路勾配を認識するものが、下記特許文献1により公知である。
【特許文献1】特開平11−203458号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、白線を検出して道路形状を認識するものでは、白線が存在しない道路や白線がかすれた道路では道路形状を認識することができず、またデリニエータを検出して道路形状を認識するものでは、デリニエータが存在しない道路では道路形状を認識することができないという問題があった。そこで、種々の路側物をテレビカメラで検出して道路形状を認識することが考えられるが、路側物は一定の間隔で存在するとは限らず、その間隔がまばらな部分で道路形状の認識が不可能になる可能性がある。
【0005】
本発明は前述の事情に鑑みてなされたもので、不定間隔で存在する路側の立体物を利用して道路形状を精度良く推定することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、請求項1に記載された発明によれば、所定の時間間隔で自車前方の画像を撮像する撮像手段と、前記画像内に存在する立体物を抽出する立体物抽出手段と、前記立体物に基づいて道路形状を推定する道路形状推定手段とを備えた道路形状推定装置において、自車の走行状態を検出する走行状態検出手段と、前記立体物の特徴点を抽出する特徴点抽出手段と、自車の走行状態に応じた前記特徴点の位置ずれを補正する特徴点補正手段と、前回撮像した画像から抽出した位置ずれ補正後の特徴点と自車の走行状態とから前記特徴点の残像を生成する残像生成手段と、相互に対応する前記特徴点および前記残像を通る複数の直線が交差する消失点を算出する消失点算出手段とを備え、前記道路形状推定手段は前記消失点を通る線分のうちで自車の左右両側に最も近いものに基づいて道路形状を推定することを特徴とする道路形状推定装置が提案される。
【0007】
また請求項2に記載された発明によれば、請求項1の構成に加えて、前記特徴点抽出手段は、前記立体物が路面に接する位置を特徴点として抽出することを特徴とする道路形状推定装置が提案される。
【発明の効果】
【0008】
請求項1の構成によれば、撮像手段で所定の時間間隔で自車前方の画像を撮像し、立体物抽出手段で前記画像内に存在する立体物を抽出し、特徴点抽出手段で前記立体物の特徴点を抽出し、走行状態検出手段で検出した自車の走行状態に応じて特徴点補正手段で前記特徴点の位置ずれを補正し、残像生成手段で前記位置ずれ補正後の特徴点と自車の走行状態とから該特徴点の残像を生成し、消失点算出手段で相互に対応する前記特徴点および前記残像を通る複数の直線が交差する消失点を算出し、道路形状推定手段で前記消失点を通る線分のうちで自車の左右両側に最も近いものに基づいて道路形状を推定するので、道路に白線が存在しない場合や前記白線が不明瞭な場合、あるいは立体物の間隔がまばらな場合であっても、道路形状を精度良く推定することができる。
【0009】
また請求項2の構成によれば、特徴点抽出手段は立体物が路面に接する位置を特徴点として抽出するので、道路形状をより高精度に推定することができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施の形態を添付図面に基づいて説明する。
【0011】
図1〜図7は本発明の実施の形態を示すもので、図1は道路形状推定装置の電子制御ユニットのブロック図、図2は特徴点補正手段の作用説明図、図3は残像生成手段および消失点算出手段の作用説明図、図4は撮像から領域設定までの作用説明図、図5は複数の直線から消失点を算出する手法を示す図、図6は各領域において道路の輪郭を示す直線を選択する手法を示す図、図7は選択した直線から道路の形状を推定する手法を示す図である。
【0012】
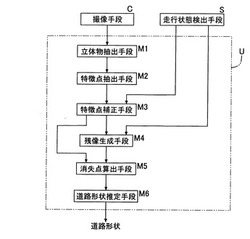
図1に示すように、道路形状推定装置の電子制御ユニットUは、立体物抽出手段M1と、特徴点抽出手段M2と、特徴点補正手段M3と、残像生成手段M4と、消失点算出手段M5と、道路形状推定手段M6とを備える。
【0013】
立体物抽出手段M1には、所定の時間間隔で自車前方の画像を撮像するテレビカメラ等で構成される撮像手段Cが接続される。立体物抽出手段M1は、撮像手段Cで撮像した自車の進行方向周辺の画像から路側に沿って離散的に存在する照明灯のポール、電柱、ガードレール、植栽、建築物等の立体物を抽出する。立体物は路面が存在する地表面に対して高さを有する物体であり、路面に引かれた白線等は除外される。特徴点抽出手段M2は、高さを有する立体物が地表面に接する部分を特徴点として抽出する。立体物の抽出および立体物の特徴点の抽出は、自車の走行に伴う撮像手段Cと被写体との位置関係の変化を利用する、公知のモーションステレオの技法を用いて行われる。
【0014】
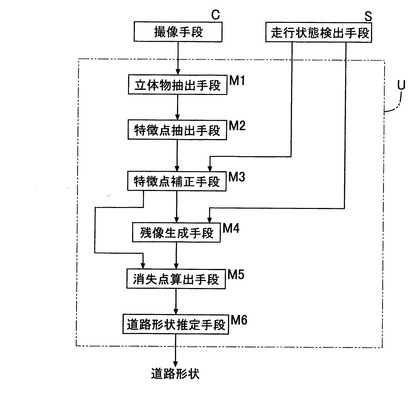
特徴点補正手段M3は、自車が車線の中央から左右方向に平行移動した場合や、自車が車線の方向に対して傾斜した場合の、撮像手段Cの画像のずれを補正する。自車が直線的な道路の左車線の中央を真っ直ぐ走っているとき、図2(A)に示すように、道路は無限遠方において自車軸線上に重なり、かつ道路の左側の白線とセンターラインとは自車軸線の左右に対称に写ることになる。
【0015】
この状態から、図2(B)に示すように、自車が左車線の中央からセンターラインに向かって右方向に平行移動したと仮定すると、自車に搭載した撮像手段Cの位置も右方向に平行移動するため、その画像における左右の白線およびセンターラインの位置が自車軸線に対して相対的に左側にずれることになる。従って、この場合には、画像における左右の白線およびセンターラインの位置を右側に移動させ、図2(A)の状態に補正する必要がある。
【0016】
また図2(C)に示すように、自車軸線が道路の方向に対して右方向に傾斜したと仮定すると、撮像手段Cの画像は左方向に回転することになる。従って、この場合には、撮像手段Cの画像を右方向に回転させて図2(A)の状態に補正する必要がある。上述した特徴点補正手段M3による補正により、自車が蛇行しながら走行した場合でも、得られる画像は自車が左車線の中央を真っ直ぐに走行した場合の画像(図2(A)参照)と同等のものとなる。
【0017】
このような特徴点補正手段M3による補正には、車線上における自車の左右方向位置やヨー角のデータが必要となるが、そのデータは特徴点補正手段M3に接続された走行状態検出手段Sで検出した自車の走行状態、つまり車速、ヨーレート、操舵角等から得ることができる。
【0018】
自車が走行する道路に沿って多数の立体物が短い間隔で整列していれば、それらの立体物から道路形状を検出することができるが、実際には利用できる立体物の間隔がまばらなため、道路形状を検出するのが困難な場合が多い。そこで、残像生成手段M4は、撮像手段Cで撮像した画像上に、各立体物の特徴点に加えて、その特徴点の残像を生成する。
【0019】
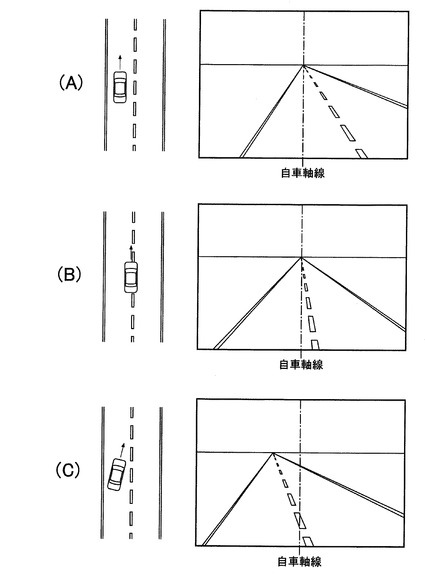
図3(A)は、自車が一定速度で走行する直線路の左右の路側にポールよりなる立体物Oが存在する場合を示している。撮像手段Cは所定時間間隔で撮像を行うもので、図3(A)は今回画像であるとする。図3(B)は前回画像を示すもので、立体物Oは今回画像よりも遠くに写っている。図3(C)は前々回画像を示すもので、立体物Oは前回画像よりも更に遠くに写っている。
【0020】
つまり、自車が道路を走行すると、立体物Oは遠方から自車に向かって相対的に接近してくる。立体物Oが地表面に接する点である特徴点Pが写った今回画像上に、前回画像の特徴点Pおよび前々回画像の特徴点Pを残像P′として重ね合わせたものが、図3(D)に示される。但し、今回画像、前回画像、前々回画像…が撮像された間に自車は一定速度で直線走行しているとは限らず加減速や旋回をするため、走行状態検出手段Sで検出した自車の運動状態に応じて今回画像上の残像P′の位置は補正される。
【0021】
つまり、図3では自車が直線路を一定速度で走行している例を示したが、道路がカーブしている場合や、自車が加減速している場合には、今回画像の特徴点Pと前回画像の特徴点Pとの位置関係に、車速、ヨーレート、操舵角のような自車の走行状態を考慮することで、今回画像上の残像P′の位置が決定される。
【0022】
Xを入力(特徴点)、Yを出力(残像)、tを画像のフレームナンバーの今回、t−1を画像のフレームナンバーの前回、ωを定数とすると、残像P′は次式により算出される。
【0023】
Yt =ωXt +(1−ω)Yt-1
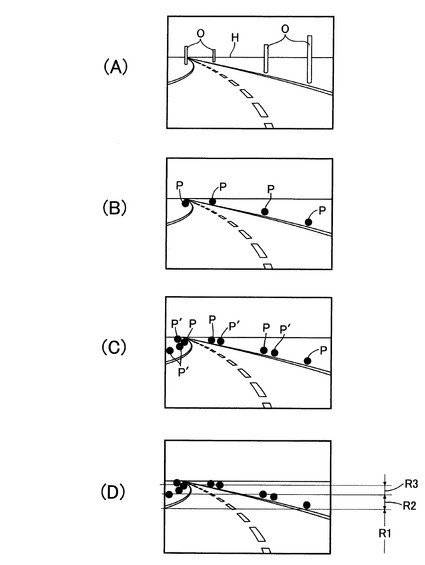
ここまでの説明を纏めると、図4(A)は、撮像手段Cにより撮像した自車前方の画像であって、左にカーブする道路は地平線Hに向かって延びており、その所々に存在するポールよりなる立体物Oが立体物抽出手段M1により抽出される。図4(B)は、特徴点抽出手段M2で画像中の立体物Oの下端の特徴点Pを抽出し、特徴点補正手段M3で自車の蛇行の影響を補償すべく前記特徴点Pの位置を補正したものである。図4(C)は、残像生成手段M4で生成した残像P′を特徴点Pに重ね合わせたものである。
【0024】
続いて、図4(D)に示すように、図4(C)の画像を、水平方向に延びる複数本(実施の形態の3本)の横線で複数(実施の形態では3個)の領域R1,R2,R3に分割する。
【0025】
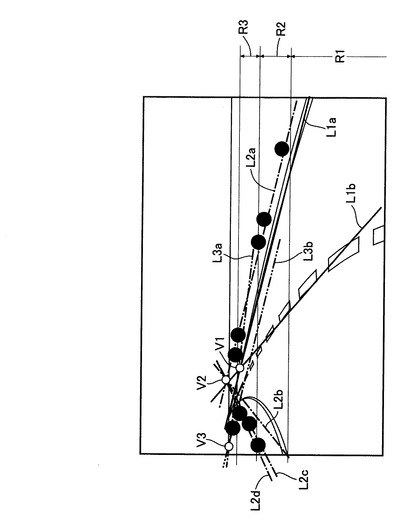
道路がカーブしているときには、画像上の道路を複数の横線により複数の領域R1,R2,R3に分割すると、各領域R1,R2,R3に含まれる道路は直線であると見做すことができる。図5に示すように、消失点算出手段M5が、各領域R1,R2,R3に含まれる道路の右側および左側の各々において、相互に対応する特徴点Pおよび残像P′を結ぶ複数の直線を引くと、それらの直線は同一点で交差し、その交差点が消失点V1,V2,V3として定義される。検出誤差等によって前記複数の直線が同一点で交差しない場合は、最も交差の頻度が高い点を消失点V1,V2,V3として選択する。
【0026】
最も手前の領域R1では、実線で示す2本の直線L1a,L1bが引かれ、それら2本の直線L1a,L1bは消失点V1で交差する。手前から2番めの領域R2では、一点鎖線で示す4本の直線L2a,L2b,L2c,L2dが引かれ、それら4本の直線L2a,L2b,L2c,L2dは消失点V2で交差する。手前から3番めの領域R3では、二点鎖線で示す2本の直線L3a,L3bが引かれ、それら2本の直線L3a,L3bは消失点V3で交差する。
【0027】
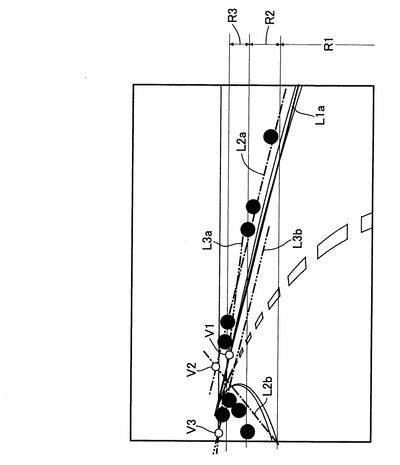
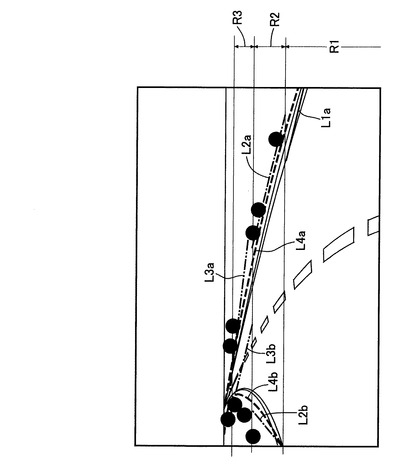
画像を分割した各領域R1,R2,R3において、相互に対応する特徴点Pおよび残像P′を結ぶ直線には、道路の側縁に近い立体物Oに対応する直線や、道路の側縁から遠い立体物Oに対応する直線が含まれるが、図6に示すように、道路形状推定手段M6は、それらの直線のうち道路の右側および左側で道路の側縁に最も近いものを選択する。具体的には、領域R1では2本の直線L1a,L1bのうちの直線L1aが選択されて直線L1bが削除され、領域R2では4本の直線L2a,L2b,L2c,L2dのうちの直線L2a,L2bが選択されて直線L2c,L2dが削除され、領域R3では2本の直線L3a,L3bの両方が選択される。
【0028】
そして、各領域R1,R2,R3において選択された直線L1a,L2a,L2b,L3a,L3bを、Hough変換や最小二乗法を用いて滑らかに繋ぎ合わせることにより、図7に破線で示すように、道路全体の形状を推定することができる。
【0029】
以上のように、道路に車線を仕切る白線が引かれていない場合や、白線がかすれて検知不可能な場合であっても、路側の立体物Oを利用して道路形状を支障なく推定することができる。しかも立体物Oの間隔がまばらな場合であっても、その立体物Oの特徴点Pが過去に検知された残像P′を算出し、それら特徴点Pおよび残像P′の両方を利用して道路形状を推定するので、どのような環境の道路であっても、その形状を精度良く推定することができる。しかも特徴点抽出手段M2は立体物Oが路面に接する位置を特徴点Pとして抽出するので、道路形状をより高精度に推定することができる。
【0030】
以上、本発明の実施の形態を詳述したが、本発明はその要旨を逸脱しない範囲で種々の設計変更を行うことが可能である。
【0031】
例えば、実施の形態では画像を3つの領域R1,R2,R3に分割しているが、領域の数は3つに限定されるものではない。
【図面の簡単な説明】
【0032】
【図1】道路形状推定装置の電子制御ユニットのブロック図
【図2】特徴点補正手段の作用説明図
【図3】残像生成手段および消失点算出手段の作用説明図
【図4】撮像から領域設定までの作用説明図
【図5】複数の直線から消失点を算出する手法を示す図
【図6】各領域において道路の輪郭を示す直線を選択する手法を示す図
【図7】選択した直線から道路の形状を推定する手法を示す図
【符号の説明】
【0033】
C 撮像手段
M1 立体物抽出手段
M2 特徴点抽出手段
M3 特徴点補正手段
M4 残像生成手段
M5 消失点算出手段
M6 道路形状推定手段
O 立体物
P 特徴点
P′ 残像
S 走行状態検出手段
V1〜V3 消失点
【技術分野】
【0001】
本発明は、所定の時間間隔で自車前方の画像を撮像する撮像手段と、前記画像内に存在する立体物を抽出する立体物抽出手段と、前記立体物に基づいて道路形状を推定する道路形状推定手段とを備えた道路形状推定装置に関する。
【背景技術】
【0002】
例えばテレビカメラで撮像した自車前方の画像から道路の白線を検出し、左右の白線に挟まれたレーンから自車が逸脱しないように運転者のステアリング操作をアシストするレーンキーピングシステムが知られている。
【0003】
また路側に沿って等間隔で配置された円形反射板を有する標識(デリニエータ)を車載のテレビカメラで撮像することで、自車前方の道路形状や道路勾配を認識するものが、下記特許文献1により公知である。
【特許文献1】特開平11−203458号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、白線を検出して道路形状を認識するものでは、白線が存在しない道路や白線がかすれた道路では道路形状を認識することができず、またデリニエータを検出して道路形状を認識するものでは、デリニエータが存在しない道路では道路形状を認識することができないという問題があった。そこで、種々の路側物をテレビカメラで検出して道路形状を認識することが考えられるが、路側物は一定の間隔で存在するとは限らず、その間隔がまばらな部分で道路形状の認識が不可能になる可能性がある。
【0005】
本発明は前述の事情に鑑みてなされたもので、不定間隔で存在する路側の立体物を利用して道路形状を精度良く推定することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、請求項1に記載された発明によれば、所定の時間間隔で自車前方の画像を撮像する撮像手段と、前記画像内に存在する立体物を抽出する立体物抽出手段と、前記立体物に基づいて道路形状を推定する道路形状推定手段とを備えた道路形状推定装置において、自車の走行状態を検出する走行状態検出手段と、前記立体物の特徴点を抽出する特徴点抽出手段と、自車の走行状態に応じた前記特徴点の位置ずれを補正する特徴点補正手段と、前回撮像した画像から抽出した位置ずれ補正後の特徴点と自車の走行状態とから前記特徴点の残像を生成する残像生成手段と、相互に対応する前記特徴点および前記残像を通る複数の直線が交差する消失点を算出する消失点算出手段とを備え、前記道路形状推定手段は前記消失点を通る線分のうちで自車の左右両側に最も近いものに基づいて道路形状を推定することを特徴とする道路形状推定装置が提案される。
【0007】
また請求項2に記載された発明によれば、請求項1の構成に加えて、前記特徴点抽出手段は、前記立体物が路面に接する位置を特徴点として抽出することを特徴とする道路形状推定装置が提案される。
【発明の効果】
【0008】
請求項1の構成によれば、撮像手段で所定の時間間隔で自車前方の画像を撮像し、立体物抽出手段で前記画像内に存在する立体物を抽出し、特徴点抽出手段で前記立体物の特徴点を抽出し、走行状態検出手段で検出した自車の走行状態に応じて特徴点補正手段で前記特徴点の位置ずれを補正し、残像生成手段で前記位置ずれ補正後の特徴点と自車の走行状態とから該特徴点の残像を生成し、消失点算出手段で相互に対応する前記特徴点および前記残像を通る複数の直線が交差する消失点を算出し、道路形状推定手段で前記消失点を通る線分のうちで自車の左右両側に最も近いものに基づいて道路形状を推定するので、道路に白線が存在しない場合や前記白線が不明瞭な場合、あるいは立体物の間隔がまばらな場合であっても、道路形状を精度良く推定することができる。
【0009】
また請求項2の構成によれば、特徴点抽出手段は立体物が路面に接する位置を特徴点として抽出するので、道路形状をより高精度に推定することができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施の形態を添付図面に基づいて説明する。
【0011】
図1〜図7は本発明の実施の形態を示すもので、図1は道路形状推定装置の電子制御ユニットのブロック図、図2は特徴点補正手段の作用説明図、図3は残像生成手段および消失点算出手段の作用説明図、図4は撮像から領域設定までの作用説明図、図5は複数の直線から消失点を算出する手法を示す図、図6は各領域において道路の輪郭を示す直線を選択する手法を示す図、図7は選択した直線から道路の形状を推定する手法を示す図である。
【0012】
図1に示すように、道路形状推定装置の電子制御ユニットUは、立体物抽出手段M1と、特徴点抽出手段M2と、特徴点補正手段M3と、残像生成手段M4と、消失点算出手段M5と、道路形状推定手段M6とを備える。
【0013】
立体物抽出手段M1には、所定の時間間隔で自車前方の画像を撮像するテレビカメラ等で構成される撮像手段Cが接続される。立体物抽出手段M1は、撮像手段Cで撮像した自車の進行方向周辺の画像から路側に沿って離散的に存在する照明灯のポール、電柱、ガードレール、植栽、建築物等の立体物を抽出する。立体物は路面が存在する地表面に対して高さを有する物体であり、路面に引かれた白線等は除外される。特徴点抽出手段M2は、高さを有する立体物が地表面に接する部分を特徴点として抽出する。立体物の抽出および立体物の特徴点の抽出は、自車の走行に伴う撮像手段Cと被写体との位置関係の変化を利用する、公知のモーションステレオの技法を用いて行われる。
【0014】
特徴点補正手段M3は、自車が車線の中央から左右方向に平行移動した場合や、自車が車線の方向に対して傾斜した場合の、撮像手段Cの画像のずれを補正する。自車が直線的な道路の左車線の中央を真っ直ぐ走っているとき、図2(A)に示すように、道路は無限遠方において自車軸線上に重なり、かつ道路の左側の白線とセンターラインとは自車軸線の左右に対称に写ることになる。
【0015】
この状態から、図2(B)に示すように、自車が左車線の中央からセンターラインに向かって右方向に平行移動したと仮定すると、自車に搭載した撮像手段Cの位置も右方向に平行移動するため、その画像における左右の白線およびセンターラインの位置が自車軸線に対して相対的に左側にずれることになる。従って、この場合には、画像における左右の白線およびセンターラインの位置を右側に移動させ、図2(A)の状態に補正する必要がある。
【0016】
また図2(C)に示すように、自車軸線が道路の方向に対して右方向に傾斜したと仮定すると、撮像手段Cの画像は左方向に回転することになる。従って、この場合には、撮像手段Cの画像を右方向に回転させて図2(A)の状態に補正する必要がある。上述した特徴点補正手段M3による補正により、自車が蛇行しながら走行した場合でも、得られる画像は自車が左車線の中央を真っ直ぐに走行した場合の画像(図2(A)参照)と同等のものとなる。
【0017】
このような特徴点補正手段M3による補正には、車線上における自車の左右方向位置やヨー角のデータが必要となるが、そのデータは特徴点補正手段M3に接続された走行状態検出手段Sで検出した自車の走行状態、つまり車速、ヨーレート、操舵角等から得ることができる。
【0018】
自車が走行する道路に沿って多数の立体物が短い間隔で整列していれば、それらの立体物から道路形状を検出することができるが、実際には利用できる立体物の間隔がまばらなため、道路形状を検出するのが困難な場合が多い。そこで、残像生成手段M4は、撮像手段Cで撮像した画像上に、各立体物の特徴点に加えて、その特徴点の残像を生成する。
【0019】
図3(A)は、自車が一定速度で走行する直線路の左右の路側にポールよりなる立体物Oが存在する場合を示している。撮像手段Cは所定時間間隔で撮像を行うもので、図3(A)は今回画像であるとする。図3(B)は前回画像を示すもので、立体物Oは今回画像よりも遠くに写っている。図3(C)は前々回画像を示すもので、立体物Oは前回画像よりも更に遠くに写っている。
【0020】
つまり、自車が道路を走行すると、立体物Oは遠方から自車に向かって相対的に接近してくる。立体物Oが地表面に接する点である特徴点Pが写った今回画像上に、前回画像の特徴点Pおよび前々回画像の特徴点Pを残像P′として重ね合わせたものが、図3(D)に示される。但し、今回画像、前回画像、前々回画像…が撮像された間に自車は一定速度で直線走行しているとは限らず加減速や旋回をするため、走行状態検出手段Sで検出した自車の運動状態に応じて今回画像上の残像P′の位置は補正される。
【0021】
つまり、図3では自車が直線路を一定速度で走行している例を示したが、道路がカーブしている場合や、自車が加減速している場合には、今回画像の特徴点Pと前回画像の特徴点Pとの位置関係に、車速、ヨーレート、操舵角のような自車の走行状態を考慮することで、今回画像上の残像P′の位置が決定される。
【0022】
Xを入力(特徴点)、Yを出力(残像)、tを画像のフレームナンバーの今回、t−1を画像のフレームナンバーの前回、ωを定数とすると、残像P′は次式により算出される。
【0023】
Yt =ωXt +(1−ω)Yt-1
ここまでの説明を纏めると、図4(A)は、撮像手段Cにより撮像した自車前方の画像であって、左にカーブする道路は地平線Hに向かって延びており、その所々に存在するポールよりなる立体物Oが立体物抽出手段M1により抽出される。図4(B)は、特徴点抽出手段M2で画像中の立体物Oの下端の特徴点Pを抽出し、特徴点補正手段M3で自車の蛇行の影響を補償すべく前記特徴点Pの位置を補正したものである。図4(C)は、残像生成手段M4で生成した残像P′を特徴点Pに重ね合わせたものである。
【0024】
続いて、図4(D)に示すように、図4(C)の画像を、水平方向に延びる複数本(実施の形態の3本)の横線で複数(実施の形態では3個)の領域R1,R2,R3に分割する。
【0025】
道路がカーブしているときには、画像上の道路を複数の横線により複数の領域R1,R2,R3に分割すると、各領域R1,R2,R3に含まれる道路は直線であると見做すことができる。図5に示すように、消失点算出手段M5が、各領域R1,R2,R3に含まれる道路の右側および左側の各々において、相互に対応する特徴点Pおよび残像P′を結ぶ複数の直線を引くと、それらの直線は同一点で交差し、その交差点が消失点V1,V2,V3として定義される。検出誤差等によって前記複数の直線が同一点で交差しない場合は、最も交差の頻度が高い点を消失点V1,V2,V3として選択する。
【0026】
最も手前の領域R1では、実線で示す2本の直線L1a,L1bが引かれ、それら2本の直線L1a,L1bは消失点V1で交差する。手前から2番めの領域R2では、一点鎖線で示す4本の直線L2a,L2b,L2c,L2dが引かれ、それら4本の直線L2a,L2b,L2c,L2dは消失点V2で交差する。手前から3番めの領域R3では、二点鎖線で示す2本の直線L3a,L3bが引かれ、それら2本の直線L3a,L3bは消失点V3で交差する。
【0027】
画像を分割した各領域R1,R2,R3において、相互に対応する特徴点Pおよび残像P′を結ぶ直線には、道路の側縁に近い立体物Oに対応する直線や、道路の側縁から遠い立体物Oに対応する直線が含まれるが、図6に示すように、道路形状推定手段M6は、それらの直線のうち道路の右側および左側で道路の側縁に最も近いものを選択する。具体的には、領域R1では2本の直線L1a,L1bのうちの直線L1aが選択されて直線L1bが削除され、領域R2では4本の直線L2a,L2b,L2c,L2dのうちの直線L2a,L2bが選択されて直線L2c,L2dが削除され、領域R3では2本の直線L3a,L3bの両方が選択される。
【0028】
そして、各領域R1,R2,R3において選択された直線L1a,L2a,L2b,L3a,L3bを、Hough変換や最小二乗法を用いて滑らかに繋ぎ合わせることにより、図7に破線で示すように、道路全体の形状を推定することができる。
【0029】
以上のように、道路に車線を仕切る白線が引かれていない場合や、白線がかすれて検知不可能な場合であっても、路側の立体物Oを利用して道路形状を支障なく推定することができる。しかも立体物Oの間隔がまばらな場合であっても、その立体物Oの特徴点Pが過去に検知された残像P′を算出し、それら特徴点Pおよび残像P′の両方を利用して道路形状を推定するので、どのような環境の道路であっても、その形状を精度良く推定することができる。しかも特徴点抽出手段M2は立体物Oが路面に接する位置を特徴点Pとして抽出するので、道路形状をより高精度に推定することができる。
【0030】
以上、本発明の実施の形態を詳述したが、本発明はその要旨を逸脱しない範囲で種々の設計変更を行うことが可能である。
【0031】
例えば、実施の形態では画像を3つの領域R1,R2,R3に分割しているが、領域の数は3つに限定されるものではない。
【図面の簡単な説明】
【0032】
【図1】道路形状推定装置の電子制御ユニットのブロック図
【図2】特徴点補正手段の作用説明図
【図3】残像生成手段および消失点算出手段の作用説明図
【図4】撮像から領域設定までの作用説明図
【図5】複数の直線から消失点を算出する手法を示す図
【図6】各領域において道路の輪郭を示す直線を選択する手法を示す図
【図7】選択した直線から道路の形状を推定する手法を示す図
【符号の説明】
【0033】
C 撮像手段
M1 立体物抽出手段
M2 特徴点抽出手段
M3 特徴点補正手段
M4 残像生成手段
M5 消失点算出手段
M6 道路形状推定手段
O 立体物
P 特徴点
P′ 残像
S 走行状態検出手段
V1〜V3 消失点
【特許請求の範囲】
【請求項1】
所定の時間間隔で自車前方の画像を撮像する撮像手段(C)と、
前記画像内に存在する立体物(O)を抽出する立体物抽出手段(M1)と、
前記立体物(O)に基づいて道路形状を推定する道路形状推定手段(M6)と、
を備えた道路形状推定装置において、
自車の走行状態を検出する走行状態検出手段(S)と、
前記立体物(O)の特徴点(P)を抽出する特徴点抽出手段(M2)と、
自車の走行状態に応じた前記特徴点(P)の位置ずれを補正する特徴点補正手段(M3)と、
前回撮像した画像から抽出した位置ずれ補正後の特徴点(P)と自車の走行状態とから前記特徴点(P)の残像(P′)を生成する残像生成手段(M4)と、 相互に対応する前記特徴点(P)および前記残像(P′)を通る複数の直線が交差する消失点(V1,V2,V3)を算出する消失点算出手段(M5)と、
を備え、
前記道路形状推定手段(M6)は前記消失点(V1,V2,V3)を通る直線のうちで自車の左右両側に最も近いものに基づいて道路形状を推定することを特徴とする道路形状推定装置。
【請求項2】
前記特徴点抽出手段(M2)は、前記立体物(O)が地表面に接する位置を特徴点(P)として抽出することを特徴とする、請求項1に記載の道路形状推定装置。
【請求項1】
所定の時間間隔で自車前方の画像を撮像する撮像手段(C)と、
前記画像内に存在する立体物(O)を抽出する立体物抽出手段(M1)と、
前記立体物(O)に基づいて道路形状を推定する道路形状推定手段(M6)と、
を備えた道路形状推定装置において、
自車の走行状態を検出する走行状態検出手段(S)と、
前記立体物(O)の特徴点(P)を抽出する特徴点抽出手段(M2)と、
自車の走行状態に応じた前記特徴点(P)の位置ずれを補正する特徴点補正手段(M3)と、
前回撮像した画像から抽出した位置ずれ補正後の特徴点(P)と自車の走行状態とから前記特徴点(P)の残像(P′)を生成する残像生成手段(M4)と、 相互に対応する前記特徴点(P)および前記残像(P′)を通る複数の直線が交差する消失点(V1,V2,V3)を算出する消失点算出手段(M5)と、
を備え、
前記道路形状推定手段(M6)は前記消失点(V1,V2,V3)を通る直線のうちで自車の左右両側に最も近いものに基づいて道路形状を推定することを特徴とする道路形状推定装置。
【請求項2】
前記特徴点抽出手段(M2)は、前記立体物(O)が地表面に接する位置を特徴点(P)として抽出することを特徴とする、請求項1に記載の道路形状推定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−75938(P2009−75938A)
【公開日】平成21年4月9日(2009.4.9)
【国際特許分類】
【出願番号】特願2007−245450(P2007−245450)
【出願日】平成19年9月21日(2007.9.21)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成21年4月9日(2009.4.9)
【国際特許分類】
【出願日】平成19年9月21日(2007.9.21)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]