
道路情報取得装置
【課題】自車両の走行経路の道路情報を精度よく取得することのできる道路情報取得装置を提供する。
【解決手段】自車両が走行する走行経路の道路標高や道路勾配を取得する際、通常の道路については地表標高に基づいて第一道路情報を演算する一方、トンネル、高架、橋、盛土道路、切土道路などの構造物が存在すると判定された場合の道路については、予め蓄積された第一道路情報とは異なる第二道路情報を取得する。構造物は、道路が地表に沿っておらず、地表標高と道路標高の差が大きくなってしまうため、地表標高に基づいて演算した場合は正確な第一道路情報を取得することはできないが、当該構造物の道路については予め蓄積された第二道路情報で補間することによって、自車両の走行経路の道路情報を精度よく取得する。
【解決手段】自車両が走行する走行経路の道路標高や道路勾配を取得する際、通常の道路については地表標高に基づいて第一道路情報を演算する一方、トンネル、高架、橋、盛土道路、切土道路などの構造物が存在すると判定された場合の道路については、予め蓄積された第一道路情報とは異なる第二道路情報を取得する。構造物は、道路が地表に沿っておらず、地表標高と道路標高の差が大きくなってしまうため、地表標高に基づいて演算した場合は正確な第一道路情報を取得することはできないが、当該構造物の道路については予め蓄積された第二道路情報で補間することによって、自車両の走行経路の道路情報を精度よく取得する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行経路における道路標高や道路勾配などの道路情報を取得する道路情報取得装置に関する。
【背景技術】
【0002】
従来、道路情報を取得するものとして、例えば特開2004−37141号公報に記載されるように、道路上の複数地点の緯度経度を記憶した道路情報記憶手段と、地図上の複数地点の地表標高情報を記憶した地表標高記憶手段と、地図上の複数地点の地表標高データを用いて道路上の複数地点の道路標高値を演算する補間標高値演算手段と、道路情報または地表標高値情報から、演算した道路標高値の確からしさを演算する確からしさ演算手段を備えたものが知られている。このような道路情報取得装置では、道路標高を推定することによって、走行経路での道路標高や道路勾配を考慮して消費燃料を抑えることのできる車両走行制御を行う。
【特許文献1】特開2004−37141号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ここで、トンネル、高架、橋、盛土道路、切土道路など、道路が地表に沿っていない構造物については、地表標高と道路標高の差が大きくなってしまう。従って、地表標高情報に基づいて道路標高を演算している上述の道路情報取得装置では、構造物での道路標高を精度よく取得することができない場合があった。更に、上述の道路情報取得装置では、構造物での道路標高は確からしさが低い区間であるとして、演算値の影響が小さくなるようにフィルタ処理を行って道路標高を推定し、あるいは構造物入口と出口の地表標高に基づいて道路標高を推定してるが、車両制御に用いるための精度としては十分でなく、誤制御によって逆に消費燃料が大きくなってしまうと共に、運転者に違和感を与えるような車両走行制御を行う場合があった。
【0004】
本発明は、このような問題を解決するためになされたものであり、自車両の走行経路の道路情報を精度よく取得することのできる道路情報取得装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明に係る道路情報取得装置は、地表標高を取得する地表標高取得手段と、地表標高に基づいて、自車両が走行する走行経路についての第一道路情報を演算する道路情報取得手段と、走行経路上に構造物が存在するか否かを判定する構造物判定手段と、を備え、道路情報取得手段は、構造物判定手段によって走行経路上に構造物が存在すると判定された場合に、構造物が存在する位置について第一道路情報と異なる第二道路情報を取得することを特徴とする。
【0006】
この道路情報取得装置では、自車両が走行する走行経路の道路標高や道路勾配を取得する際、通常の道路については地表標高に基づいて第一道路情報を演算する一方、トンネル、高架、橋、盛土道路、切土道路などの構造物が存在すると判定された場合の道路については、第一道路情報とは異なる第二道路情報、すなわち地表標高に基づいて演算したものではない第二道路情報を取得する。構造物は、道路が地表に沿っておらず、地表標高と道路標高の差が大きくなってしまうため、地表標高に基づいて演算した場合は正確な第一道路情報を取得することはできないが、当該構造物の道路については、例えばデータベースやセンターに蓄積された第二道路情報で補間することによって、自車両の走行経路の道路情報を精度よく取得することができる。
【0007】
本発明に係る道路情報取得装置において、道路情報取得手段は、自車両が有するデータベースから第二道路情報を取得することが好ましい。外部通信を行って取得する場合、何らかの理由で通信ができない状態になったときは情報を取得することができないが、自車両が有するデータベースから第二道路情報を取得することによって確実に道路情報を取得することができる。
【0008】
本発明に係る道路情報取得装置において、道路情報取得手段は、自車両の外部に存在する情報蓄積手段から第二道路情報を取得することが好ましい。自車両の外部に存在する情報蓄積手段に対しては、例えば、他の車両が学習した第二道路情報も蓄積させることができるため、自車両が有する情報記憶媒体に比べてより新しい情報を取得することができる。
【0009】
本発明に係る道路情報取得装置において、道路情報取得手段は、構造物判定手段によって走行経路上に構造物が存在すると判定された場合に、構造物が存在する位置について第一道路情報を演算しないことが好ましい。すなわち、仮に、所定の構造物における第二道路情報がデータベースやセンターなどに予め蓄積されていなかった場合であっても、地表標高に基づいては第一道路情報を演算しない。これによって、誤った道路情報に基づいて制御計画を行うことによる誤制御を防止することができる。
【0010】
本発明に係る道路情報取得装置において、自車両の走行中に、走行経路についての第二道路情報を学習する道路情報学習手段を更に備えることが好ましい。道路情報学習手段で走行経路の第二道路情報を学習することによって、次に同じ道路を走行するときのために第二道路情報をデータベースやセンターに蓄積しておくことができる。これによって、次回の走行時において、道路情報を更に精度よく取得することができる。
【0011】
本発明に係る道路情報取得装置において、第一及び第二道路情報は、具体的には、道路標高あるいは道路勾配である。
【発明の効果】
【0012】
本発明によれば、自車両の走行経路の道路標高を精度よく取得することができる。
【発明を実施するための最良の形態】
【0013】
以下、図面を参照して、本発明に係る道路情報取得装置の好適な実施形態について詳細に説明する。
【0014】
[第一実施形態]
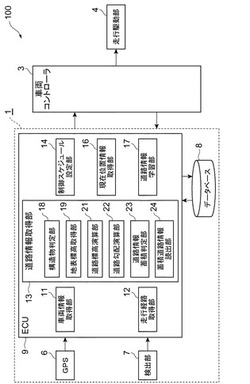
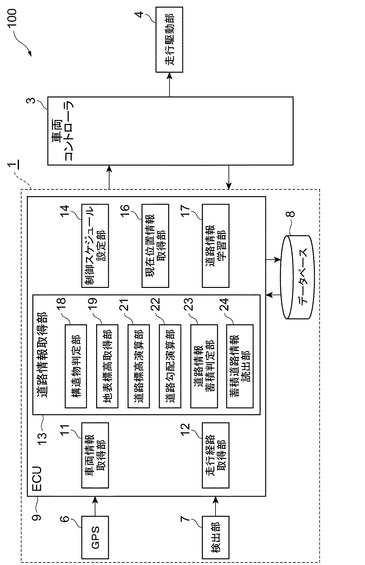
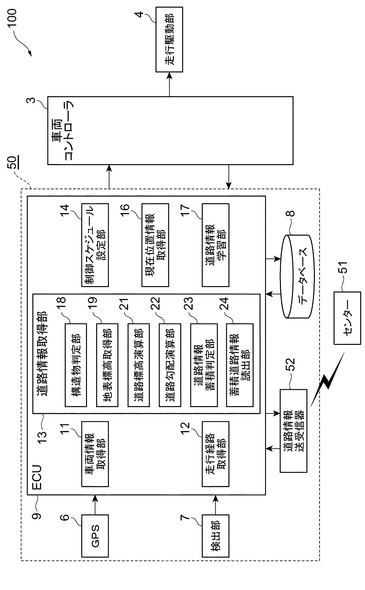
まず、本発明の第一実施形態に係る道路情報取得装置1を備える車両走行支援装置100の構成を説明する。図1は、本実施形態に係る道路情報取得装置1を備える車両走行支援装置100のブロック構成を示した図である。車両走行支援装置100は、自車両が走行する予定の走行経路における道路標高や道路勾配などの道路情報を取得すると共に、取得した道路情報に基づいて、消費燃料が少なくなるような効率のよい走行制御やハイブリッド電気自動車のバッテリの充放電を効率的に行うことのできる走行制御を計画し、当該計画に従って車両走行を制御する機能を有している。図1に示すように、車両走行支援装置100は、道路情報取得装置1、車両コントローラ3、及び走行駆動部4を備えている。
【0015】
車両コントローラ3は、自車両の走行に関する制御を行う電子制御ユニットであり、例えばCPUを主体として構成され、ROM、RAM、入力信号回路、出力信号回路、電源回路などを備えている。この車両コントローラ3は、道路情報取得装置1から受信した走行経路情報や制御スケジュール情報に基づいて走行駆動部4に走行駆動信号を発信する機能を有している。また、車両ECU3は、バッテリ残量に関する情報や自車両のHV/EV走行モードに関する情報を道路情報取得装置1に発信する機能を有している。
【0016】
走行駆動部4は、車両の走行駆動を行う機能を有し、例えばスロットルモータやインジェクタ、ハイブリッド電気自動車用のモータなどにより構成される。この走行駆動部4は、車両ECU3の走行駆動信号を受けて作動し、その走行駆動信号に応じた車両走行駆動を実行する機能を有する。
【0017】
道路情報取得装置1は、自車両の現在位置情報と運転者から入力された目的地情報とに基づき、自車両が走行する走行経路を設定すると共に、設定した走行経路における道路標高や道路勾配などの道路情報を取得することにより、自車両の最適な制御スケジュールを設定する機能を有している。また、道路情報取得装置1は、GPS6、検出部7、データベース8、及びECU(Electronic Control Unit)9を備えて構成されている。
【0018】
GPS6は、自車両の現在の走行位置における位置情報や、自車両の走行方向に関する情報を取得する機能を有し、例えば、衛星から発信された電波を受信するGPS受信機から構成される。GPS6は、取得した位置情報をECU9へ出力する機能を有する。
【0019】
検出部7は、自車両が走行している道路の道路標高や道路勾配を演算するための各種情報を検出する機能を有し、例えば、道路標高を演算するための気圧を検出する気圧センサや、道路勾配を演算するための傾斜を検出する傾斜センサ、あるいは加速度を検出する加速度センサなどの各種センサから構成されている。検出部7は、検出した各種情報をECU9へ出力する機能を有している。
【0020】
データベース8は、道路情報を取得するのに必要とされる各種情報を予め蓄積する機能を有しており、例えば、装置に内蔵されたHDDやDVD−ROMなどの情報記憶媒体によって構成されている。具体的には、データベース8は、道路種別、車線数、道路曲率半径、交差点、トンネル、橋、高架、踏切、料金所、盛土道路などの有無に関する情報、制限速度などの規制情報、市街路、山岳路などの地域情報、日本地図の地表標高メッシュデータなどを蓄積している。ここで、地表標高メッシュデータは、例えば、国土地理院より提供されるメッシュ標高データなどが用いられる。メッシュ標高データは、全国の地図を一辺50m程度の正方形の領域に細かく区分した上で、各領域の中心の標高がそれぞれ記憶されたものである。また、データベース8には、地図中の道路の道路標高データや道路勾配データなどの第二道路情報も蓄積されている。このデータベース8に蓄積された情報は、必要なタイミングで読み出すことができると共に、更に新たな情報を蓄積及び更新することもできる。ここで、第一道路情報とは、地表標高に基づいて演算することによって得られた道路情報である。一方、第二道路情報とは、第一道路情報とは異なり地表標高に基づいて演算したものではない道路情報であり、プローブカーなどにより収集された道路情報データや、自車両が過去に構造物の道路を走行したときに学習した道路情報データである。
【0021】
ECU9は、道路情報取得装置1全体の制御を行う電子制御ユニットであり、例えばCPUを主体として構成され、ROM、RAM、入力信号回路、出力信号回路、電源回路などを備えている。このECU9は、車両情報取得部11、走行経路取得部12、道路情報取得部(道路情報取得手段)13、制御スケジュール設定部14、現在位置情報取得部16、及び道路情報学習部(道路情報学習手段)17から構成されている。
【0022】
車両情報取得部11は、車両コントローラ3から入力されることによって自車両に関する情報を取得する機能を有している。車両情報取得部11は、具体的には、自車両の速度や加速度などの情報を取得すると共に、バッテリ残量に関する情報や自車両のHV/EV走行モードに関する情報を取得する。また、車両情報取得部11は、取得した車両情報を走行経路取得部12及び制御スケジュール設定部14へ出力する機能を有している。
【0023】
走行経路取得部12は、自車両が走行する設定された走行経路や推定により求められた走行経路を取得する機能を有している。走行経路取得部12は、具体的には、GPS6から入力された自車両の現在の走行位置に関する位置情報と目的地に基づいて、自車両が走行する走行経路を演算する機能を有している。なお、目的地は、車内に設けられたタッチパネルの運転者の操作によって取得することができる。走行経路取得部12は、取得した走行経路を車内のディスプレイに表示すると共に、制御スケジュール設定部14へ出力する機能を有している。
【0024】
制御スケジュール設定部14は、走行経路を走行する際における最適な制御スケジュールを設定する機能を有している。制御スケジュール設定部14は、走行経路についての道路標高や道路勾配に基づいて、消費燃料が少なくなるような効率のよい走行制御の計画や、ハイブリッド電気自動車のバッテリの充放電を効率的に行うことのできる走行制御の計画を行い、制御スケジュールを設定する。制御スケジュール設定部14は、設定した制御スケジュールを車両コントローラ3へ出力する機能を有している。
【0025】
現在位置情報取得部16は、自車両が走行経路を走行している際に、走行経路中のどの位置を走行しているかの現在位置情報を取得する機能を有している。現在位置情報取得部16は、GPS6から入力された位置情報に基づいて、設定した走行経路のうち、自車両がどの位置を走行しているかを地図上で特定する。現在位置情報取得部16は、取得した現在位置情報を車両コントローラ3へ出力する機能を有している。
【0026】
道路情報学習部17は、自車両が走行経路を走行している際に、走行中の道路の第二道路情報を取得して学習する機能を有している。道路情報学習部17は、具体的には、検出部7の気圧センサから入力された気圧情報やGPS6から入力された情報に基づいて走行中の道路の道路標高を取得し、検出部7の傾斜センサや加速度センサから入力された情報に基づいて走行中の道路の道路勾配を演算して学習する機能を有している。また、道路情報学習部17は、データベース8に第二道路情報が蓄積されていない道路を走行しているときは、当該道路についての第二道路情報をデータベース8に出力して蓄積し、あるいは、すでに蓄積されていた場合でも、最新のデータとしてデータベース8内の第二道路情報を更新する機能を有している。本実施形態では、特にトンネル、高架、橋、盛土道路、切土道路などの地表に沿ってない道路を有する構造物についての第二道路情報を学習する。
【0027】
道路情報取得部13は、自車両が走行する予定の走行経路における道路標高や道路勾配などの道路情報を取得する機能を有している。道路情報取得部13は、具体的には、走行経路のうち、地表に沿った通常の道路の道路情報は地表標高メッシュデータの地表標高に基づいて第一道路情報を演算し、構造物のように地表に沿っていない道路の道路情報はデータベースに蓄積された第二道路情報を読み出すことによって取得する。道路情報取得部13は、取得した道路情報を制御スケジュール設定部14へ出力する機能を有している。また、道路情報取得部13は、構造物判定部(構造物判定手段)18、地表標高取得部(地表標高取得手段)19、道路標高演算部21、道路勾配演算部22、道路情報蓄積判定部23、及び蓄積道路情報読出部24を備えている。
【0028】
構造物判定部18は、自車両が走行する予定の走行経路上に構造物が存在するか否かを判定する機能を有している。構造物判定部18は、データベース8に格納された情報に基づいて、走行経路にトンネル、高架、橋、盛土道路、切土道路などの構造物があるか否かを判定する。構造物判定部18は、判定結果を道路標高演算部21、道路勾配演算部22、道路情報蓄積判定部23へ出力する機能を有している。
【0029】
地表標高取得部19は、データベース8に蓄積された地表標高メッシュデータから、走行経路付近の地表標高情報を取得する機能を有している。地表標高取得部19は、取得した地表標高情報を道路標高演算部21へ出力する機能を有している。
【0030】
道路標高演算部21は、地表標高取得部19から入力された地表標高情報に基づいて、自車両が走行する予定の走行経路の各座標点における道路標高を演算する機能を有している。道路標高演算部21は、走行経路の座標点のうち、構造物判定部18によって構造物が存在しないと判定された座標点について道路標高を演算し、構造物が存在すると判定された座標点については道路標高を演算しない。道路標高演算部21は、演算した道路標高を道路勾配演算部22及び制御スケジュール設定部14へ出力する機能を有している。
【0031】
道路勾配演算部22は、道路標高演算部21から入力された道路標高に基づいて、自車両が走行する予定の走行経路の各座標点における道路勾配を演算する機能を有している。道路勾配演算部22は、走行経路の座標点のうち、構造物判定部18によって構造物が存在しないと判定された座標点について道路勾配を演算し、構造物が存在すると判定された座標点については道路勾配を演算しない。道路勾配演算部22は、演算した道路勾配を制御スケジュール設定部14へ出力する機能を有している。
【0032】
道路情報蓄積判定部23は、自車両が走行する予定の走行経路のうち、構造物が存在する座標点における道路標高及び道路勾配のデータがデータベース8に蓄積されているか否かを判定する機能を有している。道路情報蓄積判定部23は、地表標高取得部19によって構造物が存在すると判定された座標点について、データの蓄積の有無を判定する。道路情報蓄積判定部23は、判定結果を蓄積道路情報読出部24へ出力する機能を有している。
【0033】
蓄積道路情報読出部24は、自車両が走行する予定の走行経路のうち、構造物が存在する座標点における道路標高及び道路勾配のデータをデータベース8から読み出す機能を有している。蓄積道路情報読出部24は、地表標高取得部19によって構造物が存在すると判定された座標点について、道路情報蓄積判定部23によってデータベース8にデータが蓄積されていると判定された場合に各データを読み出す。
【0034】
次に、図2〜図5を参照して、本実施形態に係る道路情報取得装置1の動作について説明する。図2は、本実施形態に係る道路情報取得装置1における運転支援処理を示すフローチャートである。図3は、本実施形態に係る道路情報取得装置1における道路情報取得処理のうち、道路標高取得処理を示すフローチャートである。図4は、本実施形態に係る道路情報取得装置1における道路情報取得処理のうち、道路勾配取得処理を示すフローチャートである。図5は、本実施形態に係る道路情報学習処理を示すフローチャートである。
【0035】
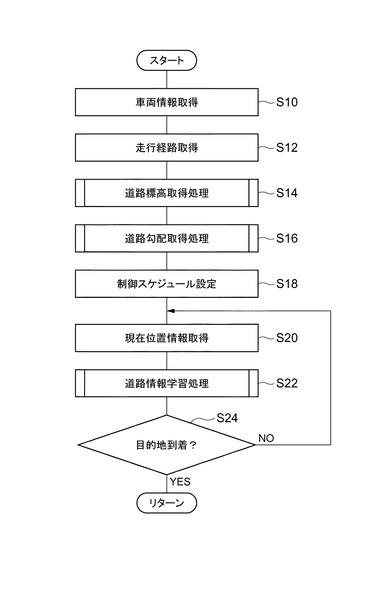
本実施形態においては、自車両がHV走行モードに設定されている場合に、出発地点でカーナビゲーションの設定画面で目的地を設定して走行を行う場合の処理について説明する。この処理は、ECU9において、目的地を設定してから出発し、目的地に到着するまでの間に行われる。なお、図2におけるS10〜S18までの処理は出発時における目的地設定直後に行われ、S20〜S24までの処理は自車両が設定された走行経路に従って走行している間に行われる。
【0036】
図2に示すように、道路情報取得装置1は、車両情報取得処理から処理を開始する(S10)。S10の処理は、車両情報取得部11で実行され、自車両の速度や加速度などの情報を取得すると共に、バッテリ残量に関する情報や自車両の走行モードに関する情報を取得する処理である。S10の処理が終了すると、走行経路取得処理へ移行する(S12)。
【0037】
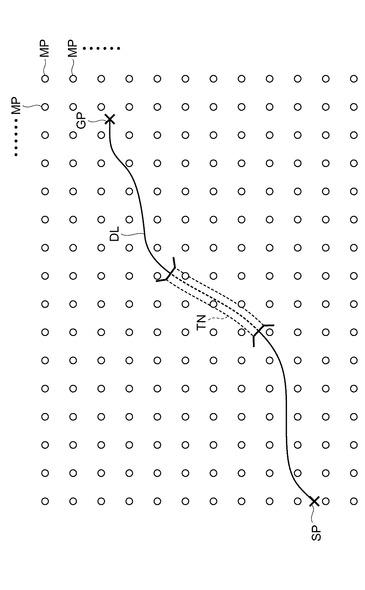
S12の処理は、走行経路取得部12で実行され、GPS6から入力された自車両の出発地点に関する位置情報と運転者によって設定された目的地に基づいて、自車両が走行する走行経路を演算する処理である。具体的には、図6に示すように、出発地点SPと目的地GPとの間に走行経路DLが設定される。S12の処理が終了すると、道路標高取得処理へ移行する(S14)。また、S14の処理が終了すると道路勾配取得処理へ移行する(S16)。
【0038】
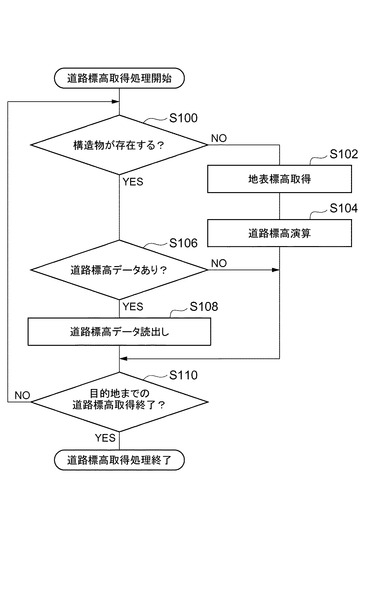
S14及びS16の処理は、道路情報取得部13で実行され、S12で取得された走行経路における道路標高及び道路勾配のような道路情報を取得する処理である。この道路標高取得処理及び道路勾配取得処理の詳細を図3及び図4を参照して説明する。道路標高取得処理及び道路勾配取得処理は、S12で取得された走行経路の出発位置における座標点と目的地における座標点との間に存在する各座標点の全てについて行われ、出発位置の座標点についての道路情報取得から開始され、目的地の座標点についての道路情報が取得されるまでの間に実行される。
【0039】
図3に示すように、道路情報取得部13は、構造物判定処理から道路標高取得処理を開始する(S100)。S100の処理は、構造物判定部18で実行され、S12で取得された走行経路上に構造物が存在するか否かを判定する処理である。例えば、図6では、走行経路DLのうち、トンネルTNを通過する位置において、構造物が存在すると判定される。S100において、対象座標点に構造物が存在しないと判定された場合は、地表標高取得処理へ移行する(S102)。
【0040】
S102の処理は、地表標高取得部19で実行され、データベース8に蓄積された地表標高メッシュデータから、走行経路付近の地表標高情報を取得する処理である。図6において、メッシュ位置はMPで示される。S102の処理が終了すると、道路標高演算処理へ移行する(S104)。
【0041】
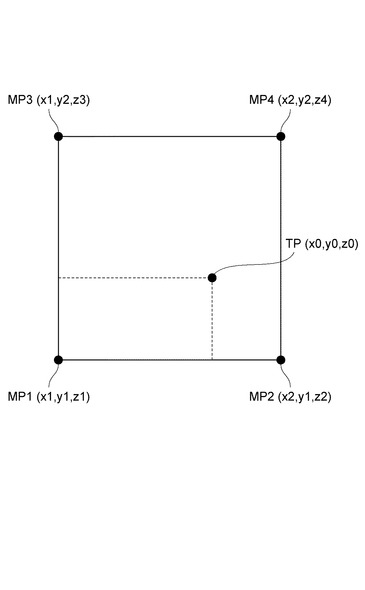
S104の処理は、道路標高演算部21で実行され、S102で取得された地表標高情報に基づいて、対象座標点における道路標高を演算する処理である。道路標高は、地表標高情報に基づいてバイリニア法によって演算される。図7を参照して道路標高演算処理について説明する。図7は、道路標高を演算する対象座標点TPと地表標高メッシュデータ上のメッシュ位置MP1〜P4を示す図である。図7に示すように対象座標点TPにおける座標を(x0,y0,z0)、メッシュ位置MP1における座標を(x1,y1,z1)、メッシュ位置MP2における座標を(x2,y1,z2)、メッシュ位置MP3における座標を(x1,y2,z3)、メッシュ位置MP4における座標を(x2,y2,z4)とした場合、対象座標点TPの道路標高、すなわちz0は以下の式(1)〜式(3)で演算される。S104の処理が終了すると、取得終了判定処理へ移行する(S110)。なお、構造物での道路勾配は演算しない。
【0042】
【数1】

【0043】
一方、S100において、対象座標点に構造物が存在すると判定された場合は道路標高蓄積判定部へ移行する(S106)。S106の処理は、道路情報蓄積判定部23で実行され、S100において構造物が存在すると判定された座標点における道路標高データがデータベース8に蓄積されているか否かを判定する処理である。S106において、道路標高データが存在しないと判定されると、道路標高の取得は行わずに取得終了判定処理へ移行する(S110)。一方、S106において、道路標高データが存在すると判定されると、道路標高データ読出処理へ移行する(S108)。
【0044】
S108の処理は蓄積道路情報読出部24で実行され、S100において構造物が存在すると判断された対象座標点における道路標高データをデータベース8から読み出す処理である。S108の処理が終了すると、取得終了判定処理へ移行する(S110)。
【0045】
S110の処理は道路情報取得部13で実行され、対象座標点が目的地まで到達したか否かを判定する処理である。S110において、対象座標点が目的地まで到達したと判定された場合は、構造物における座標点を除く走行経路の全ての座標点の道路標高を取得したとして、図3の処理を終了する。一方、S110において、対象座標点が目的地まで到達していないと判定された場合は、走行経路上の次の座標点を対象座標点として、再びS100の処理へ戻る。
【0046】
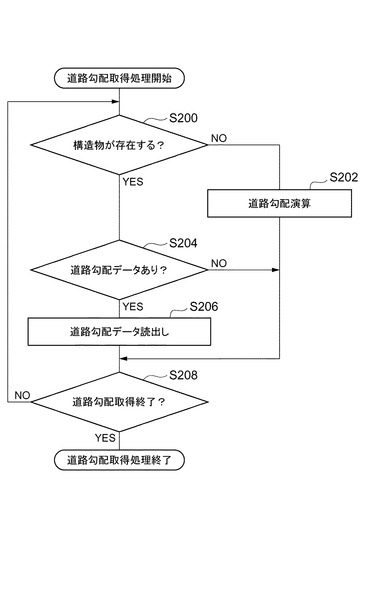
図4に示すように、道路情報取得部13は、構造物判定処理から道路勾配取得処理を開始する(S200)。S200の処理は、構造物判定部18で実行され、S12で取得された走行経路上に構造物が存在するか否かを判定する処理である。S200において、対象座標点に構造物が存在しないと判定された場合は、道路勾配演算処理へ移行する(S202)。
【0047】
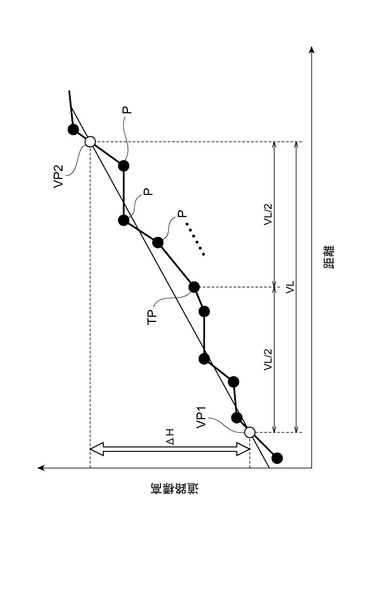
S202の処理は、道路勾配演算部22で実行され、S14の道路標高取得処理で取得された道路標高に基づいて、対象座標点における道路勾配を演算する処理である。道路勾配演算処理の具体的な道路勾配の演算について図8を参照して説明する。図8は、対象座標点とその前後に存在する座標点の道路標高と距離の関係を示す線図である。図8においては、S14で取得された各座標点Pにおける道路標高がプロットされている。図8に示すように、まず、勾配仮想距離VLを設定し、対象座標点TPから前後にVL/2離間した位置に仮想点VP1及びVP2を設定する。この仮想点VP1,VP2は、線形補間により演算することができる。次に、仮想点VP1と仮想点VP2の間の標高差ΔHを演算する。これによって、対象座標点TPの道路勾配は、[標高差ΔH(m)/勾配仮想距離VL]×100(%)で演算することができる。なお、構造物での道路勾配は演算しない。
【0048】
一方、S200において、対象座標点に構造物が存在すると判定された場合は道路勾配蓄積判定部へ移行する(S204)。S204の処理は、道路情報蓄積判定部23で実行され、S200において構造物が存在すると判定された座標点における道路勾配データがデータベース8に蓄積されているか否かを判定する処理である。S204において、道路勾配データが存在しないと判定されると、道路勾配の取得は行わずに取得終了判定処理へ移行する(S208)。一方、S204において、道路勾配データが存在すると判定されると、道路勾配データ読出処理へ移行する(S206)。
【0049】
S206の処理は蓄積道路情報読出部24で実行され、S200において構造物が存在すると判断された対象座標点における道路勾配データをデータベース8から読み出す処理である。S206の処理が終了すると、取得終了判定処理へ移行する(S208)。
【0050】
S208の処理は道路情報取得部13で実行され、対象座標点が目的地まで到達したか否かを判定する処理である。S208において、対象座標点が目的地まで到達したと判定された場合は、構造物における座標点を除く走行経路の全ての座標点の道路勾配を取得したとして、図3の処理を終了する。一方、S208において、対象座標点が目的地まで到達していないと判定された場合は、走行経路上の次の座標点を対象座標点として、再びS200の処理へ戻る。
【0051】
以上の処理が終了すると、図2へ戻り、S16の処理が終了し、制御スケジュール設定処理へ移行する(S18)。S18の処理は、制御スケジュール設定部14で実行され、S12で設定された走行経路を走行する際における最適な制御スケジュールを設定する処理である。具体的には、S18では、S14で取得した道路標高及びS16で取得した道路勾配に基づいて、ハイブリッド電気自動車のバッテリの充放電を効率的に行うことのできる走行制御の計画を行い、制御スケジュールを設定する。S18において、制御スケジュールを設定した後は、当該制御スケジュールを車両コントローラ3に出力する。S18の処理が終了すると、現在位置情報取得処理へ移行する(S20)。なお、S20の処理は、自車両が走行を開始してから実行される。
【0052】
S20の処理は、自車両の走行経路の走行中において、現在位置情報取得部16で実行され、走行経路中のどの位置を走行しているかの現在位置情報を取得する処理である。S20において、現在位置情報を取得した後は、当該現在位置情報を車両コントローラ3に出力する。現在位置情報を入力された車両コントローラ3は、S18で入力された制御スケジュールと現在位置情報とを照らし合わせて、制御スケジュールに従って走行制御を行う。S20の処理が終了すると、道路情報学習処理へ移行する(S22)。
【0053】
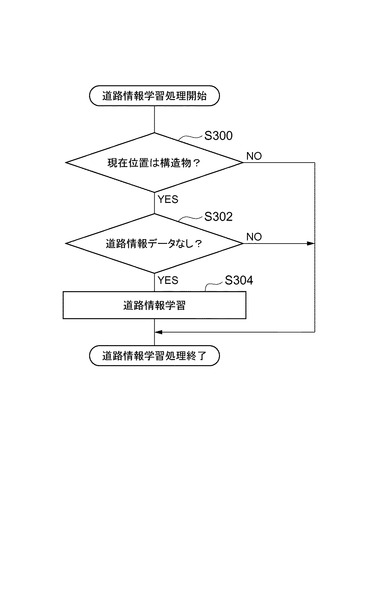
S22の処理は、道路情報学習部17で実行され、自車両が走行経路を走行している際に、走行中の道路の道路標高及び道路勾配を取得して学習する処理である。この道路情報学習処理を図5を参照して詳細に説明する。図5に示すように、道路情報学習処理は、構造物判定処理から道路情報学習処理を開始する(S300)。S300の処理は、自車両が走行している現在位置が構造物での道路であるか否かを判定する処理である。S300において、現在位置が構造物での道路ではないと判定されると、図5の処理を終了する。一方、S300において、現在位置が構造物での道路であると判定されると、道路情報蓄積判定処理へ移行する(S302)。
【0054】
S302の処理は、データベース8に自車両の現在位置における道路標高データあるいは道路勾配データが蓄積されているか否かを判定する処理である。S302において、道路標高データ及び道路勾配データがデータベース8に蓄積されていると判定されると、図5の処理を終了する。一方、S302において、道路標高データ及び道路勾配データがいずれも、あるいはいずれか一方がデータベース8に蓄積されていないと判定されると、道路情報学習処理へ移行する(S304)。
【0055】
S304の処理は、現在走行中の道路の道路標高及び道路勾配を学習し、データベース8に出力して道路情報データとして蓄積する処理である。S304の処理が終了すると、図5の処理を終了する。
【0056】
図2へ戻り、S22の処理が終了すると、目的地到達判定処理へ移行する(S24)。S24は、自車両が目的地に到達したか否かを判定する処理である。具体的には、S20で取得した現在位置と目的地とを照らし合わせて、一致する場合は目的地に到達したと判定し、一致しない場合は到達していないと判定する。S24において、目的地に到達していないと判定された場合は、再び現在位置情報取得処理へ移行し(S20)、自車両は制御スケジュールに従うと共に、第二道路情報を学習しながら走行する。一方、S24において、目的地に到達したと判定された場合は、図2の処理が終了する。
【0057】
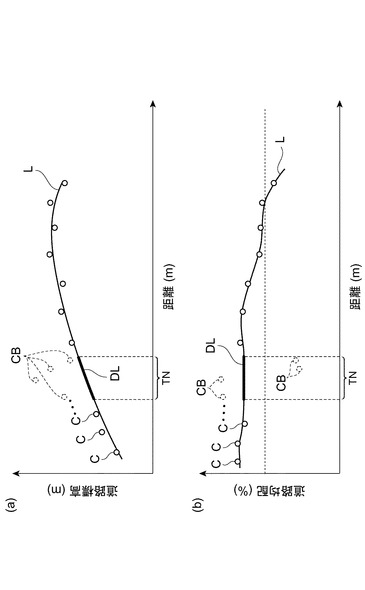
上述のような処理を行うことによって、例えば、図9に示すような道路標高及び道路勾配を取得することができる。図9(a)は、取得した各座標点の道路標高と各座標点の走行経路における距離との関係を示す線図である。また、図9(b)は、取得した各座標点の道路勾配と各座標点の走行経路における距離との関係を示す線図である。図9(a)及び図9(b)において、実際の道路標高及び道路勾配は実線の線図Lで示されている。また、地表標高から演算することによって取得された道路標高及び道路勾配は点Cで示され、データベース8から取得した道路標高及び道路勾配は太線の線図DLで示されている。構造物が存在する区間TNにおいては、演算された道路標高及び道路勾配は点線で描かれた点CBで示されるように、実際の道路標高及び道路勾配から大きくはずれたものとなる。従って、走行経路の全区間について演算された道路標高及び道路勾配を用いて制御スケジュールを設定した場合、適切な制御を行うことができず、かえって効率の悪い誤制御を行ってしまう可能性がある。このような誤制御は、区間TNにおける第一道路情報に一定の係数を掛けて影響を弱くしたとしても、生じるおそれがある。一方、構造物が存在する区間TNのみについてデータベース8から取得した道路標高及び道路勾配を用いた場合、適切な制御スケジュールを設定することができる。
【0058】
以上のように、本実施形態に係る道路情報取得装置1によれば、自車両が走行する走行経路の道路標高や道路勾配を取得する際、通常の道路については地表標高に基づいて演算する一方、トンネル、高架、橋、盛土道路、切土道路などの構造物が存在すると判定された場合の道路については、予めデータベース8に蓄積された第二道路情報を取得する。構造物は、道路が地表に沿っておらず、地表標高と道路標高の差が大きくなってしまうため、地表標高に基づいて演算した場合は正確な第一道路情報を取得することはできないが、当該構造物の道路については予め蓄積された第二道路情報で補間することによって、自車両の走行経路の道路情報を精度よく取得することができる。
【0059】
また、本実施形態に係る道路情報取得装置1において、道路標高演算部21及び道路勾配演算部22は、構造物判定部18によって構造物が存在すると判定された場合に、第一道路情報を演算しない。すなわち、仮に、所定の構造物における第二道路情報がデータベース8に予め蓄積されていなかった場合であっても、地表標高に基づいては第一道路情報を演算しない。これによって、誤った道路情報に基づいて制御計画を行うことによる誤制御を防止することができる。
【0060】
また、本実施形態に係る道路情報取得装置1において、自車両の走行中に、走行経路についての第二道路情報を学習する道路情報学習部17を備えることによって、次に同じ道路を走行するときのために第二道路情報を蓄積しておくことができる。これによって、次回の走行時において、道路情報を更に精度よく取得することができる。
【0061】
[第二実施形態]
第二実施形態に係る道路情報取得装置50が第一実施形態に係る道路情報取得装置1と異なる点は、図10に示すように、データベース8に加えて、第二道路情報が予め蓄積されているセンター(情報蓄積手段)51からも第二道路情報の読み出しが可能とされている点である。具体的には、道路情報取得装置50は、データベース8に加えて、自車両の外部に設置されているセンター51からの信号を受信することによって第二道路情報を取得することのできる道路情報送受信器52を備えている。
【0062】
次に、図11及び図12を参照して、第二実施形態に係る道路情報取得装置50の動作について説明する。図11は、第二実施形態に係る道路情報取得装置50における道路情報取得処理のうち、道路標高取得処理を示すフローチャートである。図12は、第二実施形態に係る道路情報取得装置50における道路情報取得処理のうち、道路勾配取得処理を示すフローチャートである。なお、第二実施形態に係る道路情報取得装置50の動作は、道路標高取得処理、道路勾配取得処理、及び道路情報学習処理のみが第一実施形態に係る各処理と異なっており、その他の処理については、第一実施形態と同じく、図2に示すS10〜S24の処理を行う。
【0063】
第二実施形態に係る道路情報取得装置50においては、道路標高取得処理では、図11に示すように、S106の処理において、データベース8に道路標高が蓄積されていないと判定された場合は、道路標高蓄積判定部へ移行する(S400)。S400の処理は、道路情報蓄積判定部23で実行され、S100において構造物が存在すると判定された座標点における道路標高データがセンター51に蓄積されているか否かを判定する処理である。S400において、道路標高データが存在しないと判定されると、道路標高の取得は行わずに取得終了判定処理へ移行する(S110)。一方、S400において、道路標高データが存在すると判定されると、道路標高データ読出処理へ移行する(S402)。
【0064】
S402の処理は蓄積道路情報読出部24で実行され、S100において構造物が存在すると判断された対象座標点における道路標高データをセンター51から読み出す処理である。S402の処理が終了すると、取得終了判定処理へ移行する(S110)。
【0065】
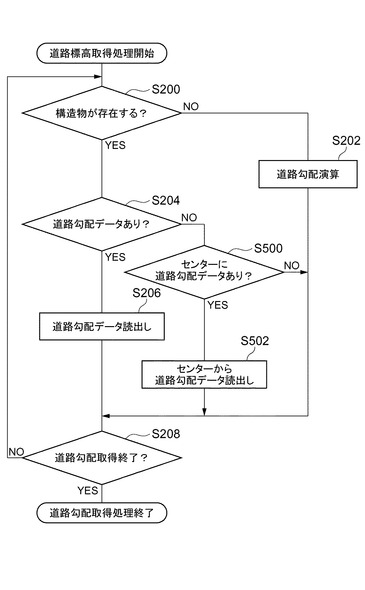
また、第二実施形態に係る道路情報取得装置50においては、道路勾配取得処理では、図12に示すように、S204において、道路勾配データが存在しないと判定されると、道路勾配蓄積判定処理へ移行する(S500)。S500の処理は、道路情報蓄積判定部23で実行され、S200において構造物が存在すると判定された座標点における道路勾配データがセンター51に蓄積されているか否かを判定する処理である。S500において、道路勾配データが存在しないと判定されると、道路勾配の取得は行わずに取得終了判定処理へ移行する(S208)。一方、S500において、道路勾配データが存在すると判定されると、道路勾配データ読出処理へ移行する(S502)。
【0066】
S502の処理は蓄積道路情報読出部24で実行され、S200において構造物が存在すると判断された対象座標点における道路勾配データをセンター51から読み出す処理である。S502の処理が終了すると、取得終了判定処理へ移行する(S208)。
【0067】
また、第二実施形態に係る道路情報取得装置50においては、道路情報学習処理では、図5に示す道路情報蓄積判定処理(S302)において、データベース8に第二道路情報が存在するか否かを判定すると共に、センター51に第二道路情報が存在するか否かも判定する。また、道路情報学習処理(S304)において、現在走行中の道路の道路標高及び道路勾配を取得し、データベース8に出力して道路情報データとして蓄積すると共に、センター51にも出力して蓄積する。
【0068】
このように、第二実施形態に係る道路情報取得装置50では、自車両の外部に存在するセンター51から第二道路情報を取得することができるため、例えば、他の車両が学習した第二道路情報も蓄積させることができ、自車両が有するデータベース8のみを利用する場合に比べてより新しい情報を取得することができる。
【0069】
一方、自車両が有するデータベース8から第二道路情報を取得すると、何らかの理由でセンター51と通信ができない状態になった場合であっても、自車両が有するデータベースから第二道路情報を取得することによって確実に道路情報を取得することができる。
【0070】
本発明は、上述した各実施形態に限定されるものではない。
【0071】
例えば、上述の実施形態では、道路情報学習処理においてデータベース8あるいはセンター51に道路情報データが存在しない場合にのみ第二道路情報を学習していたが、道路情報データが存在する場合にも学習してよい。このように、繰り返し学習することによって精度が向上する。更に、構造物における第二道路情報のみ学習していたが、構造物以外の場所も学習してよい。
【0072】
また、上述した実施形態では、道路情報を取得して効率のよい走行制御の制御スケジュールを設定していたが、その他、道路情報に基づいて消費燃料の計算を行い、運転者に通知するようにしてもよい。
【図面の簡単な説明】
【0073】
【図1】第一実施形態に係る道路情報取得装置を備える車両走行支援装置のブロック構成を示した図である。
【図2】第一実施形態に係る道路情報取得装置における運転支援処理を示すフローチャートである。
【図3】第一実施形態に係る道路情報取得装置における道路情報取得処理のうち、道路標高取得処理を示すフローチャートである。
【図4】第一実施形態に係る道路情報取得装置における道路情報取得処理のうち、道路勾配取得処理を示すフローチャートである。
【図5】第一実施形態に係る道路情報取得装置における道路情報学習処理を示すフローチャートである。
【図6】地表標高メッシュデータ中に設定された走行経路の一例を示す図である。
【図7】道路標高を演算する方法を説明するための図である。
【図8】対象座標点とその前後に存在する座標点の道路標高と距離の関係を示す線図である。
【図9】対象座標点とその前後に存在する座標点の道路標高と距離の関係を示す線図である。
【図10】第二実施形態に係る道路情報取得装置を備える車両走行支援装置のブロック構成を示した図である。
【図11】第二実施形態に係る道路情報取得装置における道路情報取得処理のうち、道路標高取得処理を示すフローチャートである。
【図12】第二実施形態に係る道路情報取得装置における道路情報取得処理のうち、道路勾配取得処理を示すフローチャートである。
【符号の説明】
【0074】
1,50…道路情報取得装置、8…データベース、13…道路情報取得部(道路情報取得手段)、17…道路情報学習部(道路情報学習手段)、18…構造物判定部(構造物判定手段)、19…地表標高取得部(地表標高取得手段)、51…センター(情報蓄積手段)。
【技術分野】
【0001】
本発明は、車両の走行経路における道路標高や道路勾配などの道路情報を取得する道路情報取得装置に関する。
【背景技術】
【0002】
従来、道路情報を取得するものとして、例えば特開2004−37141号公報に記載されるように、道路上の複数地点の緯度経度を記憶した道路情報記憶手段と、地図上の複数地点の地表標高情報を記憶した地表標高記憶手段と、地図上の複数地点の地表標高データを用いて道路上の複数地点の道路標高値を演算する補間標高値演算手段と、道路情報または地表標高値情報から、演算した道路標高値の確からしさを演算する確からしさ演算手段を備えたものが知られている。このような道路情報取得装置では、道路標高を推定することによって、走行経路での道路標高や道路勾配を考慮して消費燃料を抑えることのできる車両走行制御を行う。
【特許文献1】特開2004−37141号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ここで、トンネル、高架、橋、盛土道路、切土道路など、道路が地表に沿っていない構造物については、地表標高と道路標高の差が大きくなってしまう。従って、地表標高情報に基づいて道路標高を演算している上述の道路情報取得装置では、構造物での道路標高を精度よく取得することができない場合があった。更に、上述の道路情報取得装置では、構造物での道路標高は確からしさが低い区間であるとして、演算値の影響が小さくなるようにフィルタ処理を行って道路標高を推定し、あるいは構造物入口と出口の地表標高に基づいて道路標高を推定してるが、車両制御に用いるための精度としては十分でなく、誤制御によって逆に消費燃料が大きくなってしまうと共に、運転者に違和感を与えるような車両走行制御を行う場合があった。
【0004】
本発明は、このような問題を解決するためになされたものであり、自車両の走行経路の道路情報を精度よく取得することのできる道路情報取得装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明に係る道路情報取得装置は、地表標高を取得する地表標高取得手段と、地表標高に基づいて、自車両が走行する走行経路についての第一道路情報を演算する道路情報取得手段と、走行経路上に構造物が存在するか否かを判定する構造物判定手段と、を備え、道路情報取得手段は、構造物判定手段によって走行経路上に構造物が存在すると判定された場合に、構造物が存在する位置について第一道路情報と異なる第二道路情報を取得することを特徴とする。
【0006】
この道路情報取得装置では、自車両が走行する走行経路の道路標高や道路勾配を取得する際、通常の道路については地表標高に基づいて第一道路情報を演算する一方、トンネル、高架、橋、盛土道路、切土道路などの構造物が存在すると判定された場合の道路については、第一道路情報とは異なる第二道路情報、すなわち地表標高に基づいて演算したものではない第二道路情報を取得する。構造物は、道路が地表に沿っておらず、地表標高と道路標高の差が大きくなってしまうため、地表標高に基づいて演算した場合は正確な第一道路情報を取得することはできないが、当該構造物の道路については、例えばデータベースやセンターに蓄積された第二道路情報で補間することによって、自車両の走行経路の道路情報を精度よく取得することができる。
【0007】
本発明に係る道路情報取得装置において、道路情報取得手段は、自車両が有するデータベースから第二道路情報を取得することが好ましい。外部通信を行って取得する場合、何らかの理由で通信ができない状態になったときは情報を取得することができないが、自車両が有するデータベースから第二道路情報を取得することによって確実に道路情報を取得することができる。
【0008】
本発明に係る道路情報取得装置において、道路情報取得手段は、自車両の外部に存在する情報蓄積手段から第二道路情報を取得することが好ましい。自車両の外部に存在する情報蓄積手段に対しては、例えば、他の車両が学習した第二道路情報も蓄積させることができるため、自車両が有する情報記憶媒体に比べてより新しい情報を取得することができる。
【0009】
本発明に係る道路情報取得装置において、道路情報取得手段は、構造物判定手段によって走行経路上に構造物が存在すると判定された場合に、構造物が存在する位置について第一道路情報を演算しないことが好ましい。すなわち、仮に、所定の構造物における第二道路情報がデータベースやセンターなどに予め蓄積されていなかった場合であっても、地表標高に基づいては第一道路情報を演算しない。これによって、誤った道路情報に基づいて制御計画を行うことによる誤制御を防止することができる。
【0010】
本発明に係る道路情報取得装置において、自車両の走行中に、走行経路についての第二道路情報を学習する道路情報学習手段を更に備えることが好ましい。道路情報学習手段で走行経路の第二道路情報を学習することによって、次に同じ道路を走行するときのために第二道路情報をデータベースやセンターに蓄積しておくことができる。これによって、次回の走行時において、道路情報を更に精度よく取得することができる。
【0011】
本発明に係る道路情報取得装置において、第一及び第二道路情報は、具体的には、道路標高あるいは道路勾配である。
【発明の効果】
【0012】
本発明によれば、自車両の走行経路の道路標高を精度よく取得することができる。
【発明を実施するための最良の形態】
【0013】
以下、図面を参照して、本発明に係る道路情報取得装置の好適な実施形態について詳細に説明する。
【0014】
[第一実施形態]
まず、本発明の第一実施形態に係る道路情報取得装置1を備える車両走行支援装置100の構成を説明する。図1は、本実施形態に係る道路情報取得装置1を備える車両走行支援装置100のブロック構成を示した図である。車両走行支援装置100は、自車両が走行する予定の走行経路における道路標高や道路勾配などの道路情報を取得すると共に、取得した道路情報に基づいて、消費燃料が少なくなるような効率のよい走行制御やハイブリッド電気自動車のバッテリの充放電を効率的に行うことのできる走行制御を計画し、当該計画に従って車両走行を制御する機能を有している。図1に示すように、車両走行支援装置100は、道路情報取得装置1、車両コントローラ3、及び走行駆動部4を備えている。
【0015】
車両コントローラ3は、自車両の走行に関する制御を行う電子制御ユニットであり、例えばCPUを主体として構成され、ROM、RAM、入力信号回路、出力信号回路、電源回路などを備えている。この車両コントローラ3は、道路情報取得装置1から受信した走行経路情報や制御スケジュール情報に基づいて走行駆動部4に走行駆動信号を発信する機能を有している。また、車両ECU3は、バッテリ残量に関する情報や自車両のHV/EV走行モードに関する情報を道路情報取得装置1に発信する機能を有している。
【0016】
走行駆動部4は、車両の走行駆動を行う機能を有し、例えばスロットルモータやインジェクタ、ハイブリッド電気自動車用のモータなどにより構成される。この走行駆動部4は、車両ECU3の走行駆動信号を受けて作動し、その走行駆動信号に応じた車両走行駆動を実行する機能を有する。
【0017】
道路情報取得装置1は、自車両の現在位置情報と運転者から入力された目的地情報とに基づき、自車両が走行する走行経路を設定すると共に、設定した走行経路における道路標高や道路勾配などの道路情報を取得することにより、自車両の最適な制御スケジュールを設定する機能を有している。また、道路情報取得装置1は、GPS6、検出部7、データベース8、及びECU(Electronic Control Unit)9を備えて構成されている。
【0018】
GPS6は、自車両の現在の走行位置における位置情報や、自車両の走行方向に関する情報を取得する機能を有し、例えば、衛星から発信された電波を受信するGPS受信機から構成される。GPS6は、取得した位置情報をECU9へ出力する機能を有する。
【0019】
検出部7は、自車両が走行している道路の道路標高や道路勾配を演算するための各種情報を検出する機能を有し、例えば、道路標高を演算するための気圧を検出する気圧センサや、道路勾配を演算するための傾斜を検出する傾斜センサ、あるいは加速度を検出する加速度センサなどの各種センサから構成されている。検出部7は、検出した各種情報をECU9へ出力する機能を有している。
【0020】
データベース8は、道路情報を取得するのに必要とされる各種情報を予め蓄積する機能を有しており、例えば、装置に内蔵されたHDDやDVD−ROMなどの情報記憶媒体によって構成されている。具体的には、データベース8は、道路種別、車線数、道路曲率半径、交差点、トンネル、橋、高架、踏切、料金所、盛土道路などの有無に関する情報、制限速度などの規制情報、市街路、山岳路などの地域情報、日本地図の地表標高メッシュデータなどを蓄積している。ここで、地表標高メッシュデータは、例えば、国土地理院より提供されるメッシュ標高データなどが用いられる。メッシュ標高データは、全国の地図を一辺50m程度の正方形の領域に細かく区分した上で、各領域の中心の標高がそれぞれ記憶されたものである。また、データベース8には、地図中の道路の道路標高データや道路勾配データなどの第二道路情報も蓄積されている。このデータベース8に蓄積された情報は、必要なタイミングで読み出すことができると共に、更に新たな情報を蓄積及び更新することもできる。ここで、第一道路情報とは、地表標高に基づいて演算することによって得られた道路情報である。一方、第二道路情報とは、第一道路情報とは異なり地表標高に基づいて演算したものではない道路情報であり、プローブカーなどにより収集された道路情報データや、自車両が過去に構造物の道路を走行したときに学習した道路情報データである。
【0021】
ECU9は、道路情報取得装置1全体の制御を行う電子制御ユニットであり、例えばCPUを主体として構成され、ROM、RAM、入力信号回路、出力信号回路、電源回路などを備えている。このECU9は、車両情報取得部11、走行経路取得部12、道路情報取得部(道路情報取得手段)13、制御スケジュール設定部14、現在位置情報取得部16、及び道路情報学習部(道路情報学習手段)17から構成されている。
【0022】
車両情報取得部11は、車両コントローラ3から入力されることによって自車両に関する情報を取得する機能を有している。車両情報取得部11は、具体的には、自車両の速度や加速度などの情報を取得すると共に、バッテリ残量に関する情報や自車両のHV/EV走行モードに関する情報を取得する。また、車両情報取得部11は、取得した車両情報を走行経路取得部12及び制御スケジュール設定部14へ出力する機能を有している。
【0023】
走行経路取得部12は、自車両が走行する設定された走行経路や推定により求められた走行経路を取得する機能を有している。走行経路取得部12は、具体的には、GPS6から入力された自車両の現在の走行位置に関する位置情報と目的地に基づいて、自車両が走行する走行経路を演算する機能を有している。なお、目的地は、車内に設けられたタッチパネルの運転者の操作によって取得することができる。走行経路取得部12は、取得した走行経路を車内のディスプレイに表示すると共に、制御スケジュール設定部14へ出力する機能を有している。
【0024】
制御スケジュール設定部14は、走行経路を走行する際における最適な制御スケジュールを設定する機能を有している。制御スケジュール設定部14は、走行経路についての道路標高や道路勾配に基づいて、消費燃料が少なくなるような効率のよい走行制御の計画や、ハイブリッド電気自動車のバッテリの充放電を効率的に行うことのできる走行制御の計画を行い、制御スケジュールを設定する。制御スケジュール設定部14は、設定した制御スケジュールを車両コントローラ3へ出力する機能を有している。
【0025】
現在位置情報取得部16は、自車両が走行経路を走行している際に、走行経路中のどの位置を走行しているかの現在位置情報を取得する機能を有している。現在位置情報取得部16は、GPS6から入力された位置情報に基づいて、設定した走行経路のうち、自車両がどの位置を走行しているかを地図上で特定する。現在位置情報取得部16は、取得した現在位置情報を車両コントローラ3へ出力する機能を有している。
【0026】
道路情報学習部17は、自車両が走行経路を走行している際に、走行中の道路の第二道路情報を取得して学習する機能を有している。道路情報学習部17は、具体的には、検出部7の気圧センサから入力された気圧情報やGPS6から入力された情報に基づいて走行中の道路の道路標高を取得し、検出部7の傾斜センサや加速度センサから入力された情報に基づいて走行中の道路の道路勾配を演算して学習する機能を有している。また、道路情報学習部17は、データベース8に第二道路情報が蓄積されていない道路を走行しているときは、当該道路についての第二道路情報をデータベース8に出力して蓄積し、あるいは、すでに蓄積されていた場合でも、最新のデータとしてデータベース8内の第二道路情報を更新する機能を有している。本実施形態では、特にトンネル、高架、橋、盛土道路、切土道路などの地表に沿ってない道路を有する構造物についての第二道路情報を学習する。
【0027】
道路情報取得部13は、自車両が走行する予定の走行経路における道路標高や道路勾配などの道路情報を取得する機能を有している。道路情報取得部13は、具体的には、走行経路のうち、地表に沿った通常の道路の道路情報は地表標高メッシュデータの地表標高に基づいて第一道路情報を演算し、構造物のように地表に沿っていない道路の道路情報はデータベースに蓄積された第二道路情報を読み出すことによって取得する。道路情報取得部13は、取得した道路情報を制御スケジュール設定部14へ出力する機能を有している。また、道路情報取得部13は、構造物判定部(構造物判定手段)18、地表標高取得部(地表標高取得手段)19、道路標高演算部21、道路勾配演算部22、道路情報蓄積判定部23、及び蓄積道路情報読出部24を備えている。
【0028】
構造物判定部18は、自車両が走行する予定の走行経路上に構造物が存在するか否かを判定する機能を有している。構造物判定部18は、データベース8に格納された情報に基づいて、走行経路にトンネル、高架、橋、盛土道路、切土道路などの構造物があるか否かを判定する。構造物判定部18は、判定結果を道路標高演算部21、道路勾配演算部22、道路情報蓄積判定部23へ出力する機能を有している。
【0029】
地表標高取得部19は、データベース8に蓄積された地表標高メッシュデータから、走行経路付近の地表標高情報を取得する機能を有している。地表標高取得部19は、取得した地表標高情報を道路標高演算部21へ出力する機能を有している。
【0030】
道路標高演算部21は、地表標高取得部19から入力された地表標高情報に基づいて、自車両が走行する予定の走行経路の各座標点における道路標高を演算する機能を有している。道路標高演算部21は、走行経路の座標点のうち、構造物判定部18によって構造物が存在しないと判定された座標点について道路標高を演算し、構造物が存在すると判定された座標点については道路標高を演算しない。道路標高演算部21は、演算した道路標高を道路勾配演算部22及び制御スケジュール設定部14へ出力する機能を有している。
【0031】
道路勾配演算部22は、道路標高演算部21から入力された道路標高に基づいて、自車両が走行する予定の走行経路の各座標点における道路勾配を演算する機能を有している。道路勾配演算部22は、走行経路の座標点のうち、構造物判定部18によって構造物が存在しないと判定された座標点について道路勾配を演算し、構造物が存在すると判定された座標点については道路勾配を演算しない。道路勾配演算部22は、演算した道路勾配を制御スケジュール設定部14へ出力する機能を有している。
【0032】
道路情報蓄積判定部23は、自車両が走行する予定の走行経路のうち、構造物が存在する座標点における道路標高及び道路勾配のデータがデータベース8に蓄積されているか否かを判定する機能を有している。道路情報蓄積判定部23は、地表標高取得部19によって構造物が存在すると判定された座標点について、データの蓄積の有無を判定する。道路情報蓄積判定部23は、判定結果を蓄積道路情報読出部24へ出力する機能を有している。
【0033】
蓄積道路情報読出部24は、自車両が走行する予定の走行経路のうち、構造物が存在する座標点における道路標高及び道路勾配のデータをデータベース8から読み出す機能を有している。蓄積道路情報読出部24は、地表標高取得部19によって構造物が存在すると判定された座標点について、道路情報蓄積判定部23によってデータベース8にデータが蓄積されていると判定された場合に各データを読み出す。
【0034】
次に、図2〜図5を参照して、本実施形態に係る道路情報取得装置1の動作について説明する。図2は、本実施形態に係る道路情報取得装置1における運転支援処理を示すフローチャートである。図3は、本実施形態に係る道路情報取得装置1における道路情報取得処理のうち、道路標高取得処理を示すフローチャートである。図4は、本実施形態に係る道路情報取得装置1における道路情報取得処理のうち、道路勾配取得処理を示すフローチャートである。図5は、本実施形態に係る道路情報学習処理を示すフローチャートである。
【0035】
本実施形態においては、自車両がHV走行モードに設定されている場合に、出発地点でカーナビゲーションの設定画面で目的地を設定して走行を行う場合の処理について説明する。この処理は、ECU9において、目的地を設定してから出発し、目的地に到着するまでの間に行われる。なお、図2におけるS10〜S18までの処理は出発時における目的地設定直後に行われ、S20〜S24までの処理は自車両が設定された走行経路に従って走行している間に行われる。
【0036】
図2に示すように、道路情報取得装置1は、車両情報取得処理から処理を開始する(S10)。S10の処理は、車両情報取得部11で実行され、自車両の速度や加速度などの情報を取得すると共に、バッテリ残量に関する情報や自車両の走行モードに関する情報を取得する処理である。S10の処理が終了すると、走行経路取得処理へ移行する(S12)。
【0037】
S12の処理は、走行経路取得部12で実行され、GPS6から入力された自車両の出発地点に関する位置情報と運転者によって設定された目的地に基づいて、自車両が走行する走行経路を演算する処理である。具体的には、図6に示すように、出発地点SPと目的地GPとの間に走行経路DLが設定される。S12の処理が終了すると、道路標高取得処理へ移行する(S14)。また、S14の処理が終了すると道路勾配取得処理へ移行する(S16)。
【0038】
S14及びS16の処理は、道路情報取得部13で実行され、S12で取得された走行経路における道路標高及び道路勾配のような道路情報を取得する処理である。この道路標高取得処理及び道路勾配取得処理の詳細を図3及び図4を参照して説明する。道路標高取得処理及び道路勾配取得処理は、S12で取得された走行経路の出発位置における座標点と目的地における座標点との間に存在する各座標点の全てについて行われ、出発位置の座標点についての道路情報取得から開始され、目的地の座標点についての道路情報が取得されるまでの間に実行される。
【0039】
図3に示すように、道路情報取得部13は、構造物判定処理から道路標高取得処理を開始する(S100)。S100の処理は、構造物判定部18で実行され、S12で取得された走行経路上に構造物が存在するか否かを判定する処理である。例えば、図6では、走行経路DLのうち、トンネルTNを通過する位置において、構造物が存在すると判定される。S100において、対象座標点に構造物が存在しないと判定された場合は、地表標高取得処理へ移行する(S102)。
【0040】
S102の処理は、地表標高取得部19で実行され、データベース8に蓄積された地表標高メッシュデータから、走行経路付近の地表標高情報を取得する処理である。図6において、メッシュ位置はMPで示される。S102の処理が終了すると、道路標高演算処理へ移行する(S104)。
【0041】
S104の処理は、道路標高演算部21で実行され、S102で取得された地表標高情報に基づいて、対象座標点における道路標高を演算する処理である。道路標高は、地表標高情報に基づいてバイリニア法によって演算される。図7を参照して道路標高演算処理について説明する。図7は、道路標高を演算する対象座標点TPと地表標高メッシュデータ上のメッシュ位置MP1〜P4を示す図である。図7に示すように対象座標点TPにおける座標を(x0,y0,z0)、メッシュ位置MP1における座標を(x1,y1,z1)、メッシュ位置MP2における座標を(x2,y1,z2)、メッシュ位置MP3における座標を(x1,y2,z3)、メッシュ位置MP4における座標を(x2,y2,z4)とした場合、対象座標点TPの道路標高、すなわちz0は以下の式(1)〜式(3)で演算される。S104の処理が終了すると、取得終了判定処理へ移行する(S110)。なお、構造物での道路勾配は演算しない。
【0042】
【数1】
【0043】
一方、S100において、対象座標点に構造物が存在すると判定された場合は道路標高蓄積判定部へ移行する(S106)。S106の処理は、道路情報蓄積判定部23で実行され、S100において構造物が存在すると判定された座標点における道路標高データがデータベース8に蓄積されているか否かを判定する処理である。S106において、道路標高データが存在しないと判定されると、道路標高の取得は行わずに取得終了判定処理へ移行する(S110)。一方、S106において、道路標高データが存在すると判定されると、道路標高データ読出処理へ移行する(S108)。
【0044】
S108の処理は蓄積道路情報読出部24で実行され、S100において構造物が存在すると判断された対象座標点における道路標高データをデータベース8から読み出す処理である。S108の処理が終了すると、取得終了判定処理へ移行する(S110)。
【0045】
S110の処理は道路情報取得部13で実行され、対象座標点が目的地まで到達したか否かを判定する処理である。S110において、対象座標点が目的地まで到達したと判定された場合は、構造物における座標点を除く走行経路の全ての座標点の道路標高を取得したとして、図3の処理を終了する。一方、S110において、対象座標点が目的地まで到達していないと判定された場合は、走行経路上の次の座標点を対象座標点として、再びS100の処理へ戻る。
【0046】
図4に示すように、道路情報取得部13は、構造物判定処理から道路勾配取得処理を開始する(S200)。S200の処理は、構造物判定部18で実行され、S12で取得された走行経路上に構造物が存在するか否かを判定する処理である。S200において、対象座標点に構造物が存在しないと判定された場合は、道路勾配演算処理へ移行する(S202)。
【0047】
S202の処理は、道路勾配演算部22で実行され、S14の道路標高取得処理で取得された道路標高に基づいて、対象座標点における道路勾配を演算する処理である。道路勾配演算処理の具体的な道路勾配の演算について図8を参照して説明する。図8は、対象座標点とその前後に存在する座標点の道路標高と距離の関係を示す線図である。図8においては、S14で取得された各座標点Pにおける道路標高がプロットされている。図8に示すように、まず、勾配仮想距離VLを設定し、対象座標点TPから前後にVL/2離間した位置に仮想点VP1及びVP2を設定する。この仮想点VP1,VP2は、線形補間により演算することができる。次に、仮想点VP1と仮想点VP2の間の標高差ΔHを演算する。これによって、対象座標点TPの道路勾配は、[標高差ΔH(m)/勾配仮想距離VL]×100(%)で演算することができる。なお、構造物での道路勾配は演算しない。
【0048】
一方、S200において、対象座標点に構造物が存在すると判定された場合は道路勾配蓄積判定部へ移行する(S204)。S204の処理は、道路情報蓄積判定部23で実行され、S200において構造物が存在すると判定された座標点における道路勾配データがデータベース8に蓄積されているか否かを判定する処理である。S204において、道路勾配データが存在しないと判定されると、道路勾配の取得は行わずに取得終了判定処理へ移行する(S208)。一方、S204において、道路勾配データが存在すると判定されると、道路勾配データ読出処理へ移行する(S206)。
【0049】
S206の処理は蓄積道路情報読出部24で実行され、S200において構造物が存在すると判断された対象座標点における道路勾配データをデータベース8から読み出す処理である。S206の処理が終了すると、取得終了判定処理へ移行する(S208)。
【0050】
S208の処理は道路情報取得部13で実行され、対象座標点が目的地まで到達したか否かを判定する処理である。S208において、対象座標点が目的地まで到達したと判定された場合は、構造物における座標点を除く走行経路の全ての座標点の道路勾配を取得したとして、図3の処理を終了する。一方、S208において、対象座標点が目的地まで到達していないと判定された場合は、走行経路上の次の座標点を対象座標点として、再びS200の処理へ戻る。
【0051】
以上の処理が終了すると、図2へ戻り、S16の処理が終了し、制御スケジュール設定処理へ移行する(S18)。S18の処理は、制御スケジュール設定部14で実行され、S12で設定された走行経路を走行する際における最適な制御スケジュールを設定する処理である。具体的には、S18では、S14で取得した道路標高及びS16で取得した道路勾配に基づいて、ハイブリッド電気自動車のバッテリの充放電を効率的に行うことのできる走行制御の計画を行い、制御スケジュールを設定する。S18において、制御スケジュールを設定した後は、当該制御スケジュールを車両コントローラ3に出力する。S18の処理が終了すると、現在位置情報取得処理へ移行する(S20)。なお、S20の処理は、自車両が走行を開始してから実行される。
【0052】
S20の処理は、自車両の走行経路の走行中において、現在位置情報取得部16で実行され、走行経路中のどの位置を走行しているかの現在位置情報を取得する処理である。S20において、現在位置情報を取得した後は、当該現在位置情報を車両コントローラ3に出力する。現在位置情報を入力された車両コントローラ3は、S18で入力された制御スケジュールと現在位置情報とを照らし合わせて、制御スケジュールに従って走行制御を行う。S20の処理が終了すると、道路情報学習処理へ移行する(S22)。
【0053】
S22の処理は、道路情報学習部17で実行され、自車両が走行経路を走行している際に、走行中の道路の道路標高及び道路勾配を取得して学習する処理である。この道路情報学習処理を図5を参照して詳細に説明する。図5に示すように、道路情報学習処理は、構造物判定処理から道路情報学習処理を開始する(S300)。S300の処理は、自車両が走行している現在位置が構造物での道路であるか否かを判定する処理である。S300において、現在位置が構造物での道路ではないと判定されると、図5の処理を終了する。一方、S300において、現在位置が構造物での道路であると判定されると、道路情報蓄積判定処理へ移行する(S302)。
【0054】
S302の処理は、データベース8に自車両の現在位置における道路標高データあるいは道路勾配データが蓄積されているか否かを判定する処理である。S302において、道路標高データ及び道路勾配データがデータベース8に蓄積されていると判定されると、図5の処理を終了する。一方、S302において、道路標高データ及び道路勾配データがいずれも、あるいはいずれか一方がデータベース8に蓄積されていないと判定されると、道路情報学習処理へ移行する(S304)。
【0055】
S304の処理は、現在走行中の道路の道路標高及び道路勾配を学習し、データベース8に出力して道路情報データとして蓄積する処理である。S304の処理が終了すると、図5の処理を終了する。
【0056】
図2へ戻り、S22の処理が終了すると、目的地到達判定処理へ移行する(S24)。S24は、自車両が目的地に到達したか否かを判定する処理である。具体的には、S20で取得した現在位置と目的地とを照らし合わせて、一致する場合は目的地に到達したと判定し、一致しない場合は到達していないと判定する。S24において、目的地に到達していないと判定された場合は、再び現在位置情報取得処理へ移行し(S20)、自車両は制御スケジュールに従うと共に、第二道路情報を学習しながら走行する。一方、S24において、目的地に到達したと判定された場合は、図2の処理が終了する。
【0057】
上述のような処理を行うことによって、例えば、図9に示すような道路標高及び道路勾配を取得することができる。図9(a)は、取得した各座標点の道路標高と各座標点の走行経路における距離との関係を示す線図である。また、図9(b)は、取得した各座標点の道路勾配と各座標点の走行経路における距離との関係を示す線図である。図9(a)及び図9(b)において、実際の道路標高及び道路勾配は実線の線図Lで示されている。また、地表標高から演算することによって取得された道路標高及び道路勾配は点Cで示され、データベース8から取得した道路標高及び道路勾配は太線の線図DLで示されている。構造物が存在する区間TNにおいては、演算された道路標高及び道路勾配は点線で描かれた点CBで示されるように、実際の道路標高及び道路勾配から大きくはずれたものとなる。従って、走行経路の全区間について演算された道路標高及び道路勾配を用いて制御スケジュールを設定した場合、適切な制御を行うことができず、かえって効率の悪い誤制御を行ってしまう可能性がある。このような誤制御は、区間TNにおける第一道路情報に一定の係数を掛けて影響を弱くしたとしても、生じるおそれがある。一方、構造物が存在する区間TNのみについてデータベース8から取得した道路標高及び道路勾配を用いた場合、適切な制御スケジュールを設定することができる。
【0058】
以上のように、本実施形態に係る道路情報取得装置1によれば、自車両が走行する走行経路の道路標高や道路勾配を取得する際、通常の道路については地表標高に基づいて演算する一方、トンネル、高架、橋、盛土道路、切土道路などの構造物が存在すると判定された場合の道路については、予めデータベース8に蓄積された第二道路情報を取得する。構造物は、道路が地表に沿っておらず、地表標高と道路標高の差が大きくなってしまうため、地表標高に基づいて演算した場合は正確な第一道路情報を取得することはできないが、当該構造物の道路については予め蓄積された第二道路情報で補間することによって、自車両の走行経路の道路情報を精度よく取得することができる。
【0059】
また、本実施形態に係る道路情報取得装置1において、道路標高演算部21及び道路勾配演算部22は、構造物判定部18によって構造物が存在すると判定された場合に、第一道路情報を演算しない。すなわち、仮に、所定の構造物における第二道路情報がデータベース8に予め蓄積されていなかった場合であっても、地表標高に基づいては第一道路情報を演算しない。これによって、誤った道路情報に基づいて制御計画を行うことによる誤制御を防止することができる。
【0060】
また、本実施形態に係る道路情報取得装置1において、自車両の走行中に、走行経路についての第二道路情報を学習する道路情報学習部17を備えることによって、次に同じ道路を走行するときのために第二道路情報を蓄積しておくことができる。これによって、次回の走行時において、道路情報を更に精度よく取得することができる。
【0061】
[第二実施形態]
第二実施形態に係る道路情報取得装置50が第一実施形態に係る道路情報取得装置1と異なる点は、図10に示すように、データベース8に加えて、第二道路情報が予め蓄積されているセンター(情報蓄積手段)51からも第二道路情報の読み出しが可能とされている点である。具体的には、道路情報取得装置50は、データベース8に加えて、自車両の外部に設置されているセンター51からの信号を受信することによって第二道路情報を取得することのできる道路情報送受信器52を備えている。
【0062】
次に、図11及び図12を参照して、第二実施形態に係る道路情報取得装置50の動作について説明する。図11は、第二実施形態に係る道路情報取得装置50における道路情報取得処理のうち、道路標高取得処理を示すフローチャートである。図12は、第二実施形態に係る道路情報取得装置50における道路情報取得処理のうち、道路勾配取得処理を示すフローチャートである。なお、第二実施形態に係る道路情報取得装置50の動作は、道路標高取得処理、道路勾配取得処理、及び道路情報学習処理のみが第一実施形態に係る各処理と異なっており、その他の処理については、第一実施形態と同じく、図2に示すS10〜S24の処理を行う。
【0063】
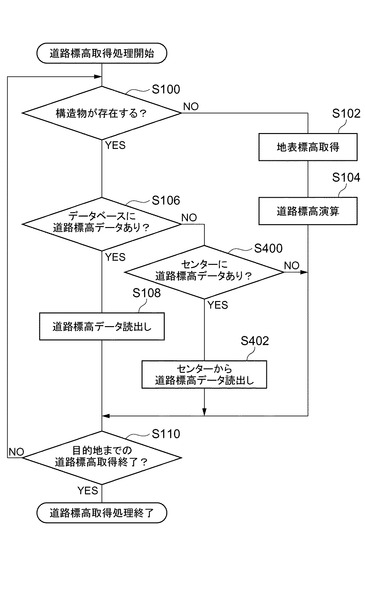
第二実施形態に係る道路情報取得装置50においては、道路標高取得処理では、図11に示すように、S106の処理において、データベース8に道路標高が蓄積されていないと判定された場合は、道路標高蓄積判定部へ移行する(S400)。S400の処理は、道路情報蓄積判定部23で実行され、S100において構造物が存在すると判定された座標点における道路標高データがセンター51に蓄積されているか否かを判定する処理である。S400において、道路標高データが存在しないと判定されると、道路標高の取得は行わずに取得終了判定処理へ移行する(S110)。一方、S400において、道路標高データが存在すると判定されると、道路標高データ読出処理へ移行する(S402)。
【0064】
S402の処理は蓄積道路情報読出部24で実行され、S100において構造物が存在すると判断された対象座標点における道路標高データをセンター51から読み出す処理である。S402の処理が終了すると、取得終了判定処理へ移行する(S110)。
【0065】
また、第二実施形態に係る道路情報取得装置50においては、道路勾配取得処理では、図12に示すように、S204において、道路勾配データが存在しないと判定されると、道路勾配蓄積判定処理へ移行する(S500)。S500の処理は、道路情報蓄積判定部23で実行され、S200において構造物が存在すると判定された座標点における道路勾配データがセンター51に蓄積されているか否かを判定する処理である。S500において、道路勾配データが存在しないと判定されると、道路勾配の取得は行わずに取得終了判定処理へ移行する(S208)。一方、S500において、道路勾配データが存在すると判定されると、道路勾配データ読出処理へ移行する(S502)。
【0066】
S502の処理は蓄積道路情報読出部24で実行され、S200において構造物が存在すると判断された対象座標点における道路勾配データをセンター51から読み出す処理である。S502の処理が終了すると、取得終了判定処理へ移行する(S208)。
【0067】
また、第二実施形態に係る道路情報取得装置50においては、道路情報学習処理では、図5に示す道路情報蓄積判定処理(S302)において、データベース8に第二道路情報が存在するか否かを判定すると共に、センター51に第二道路情報が存在するか否かも判定する。また、道路情報学習処理(S304)において、現在走行中の道路の道路標高及び道路勾配を取得し、データベース8に出力して道路情報データとして蓄積すると共に、センター51にも出力して蓄積する。
【0068】
このように、第二実施形態に係る道路情報取得装置50では、自車両の外部に存在するセンター51から第二道路情報を取得することができるため、例えば、他の車両が学習した第二道路情報も蓄積させることができ、自車両が有するデータベース8のみを利用する場合に比べてより新しい情報を取得することができる。
【0069】
一方、自車両が有するデータベース8から第二道路情報を取得すると、何らかの理由でセンター51と通信ができない状態になった場合であっても、自車両が有するデータベースから第二道路情報を取得することによって確実に道路情報を取得することができる。
【0070】
本発明は、上述した各実施形態に限定されるものではない。
【0071】
例えば、上述の実施形態では、道路情報学習処理においてデータベース8あるいはセンター51に道路情報データが存在しない場合にのみ第二道路情報を学習していたが、道路情報データが存在する場合にも学習してよい。このように、繰り返し学習することによって精度が向上する。更に、構造物における第二道路情報のみ学習していたが、構造物以外の場所も学習してよい。
【0072】
また、上述した実施形態では、道路情報を取得して効率のよい走行制御の制御スケジュールを設定していたが、その他、道路情報に基づいて消費燃料の計算を行い、運転者に通知するようにしてもよい。
【図面の簡単な説明】
【0073】
【図1】第一実施形態に係る道路情報取得装置を備える車両走行支援装置のブロック構成を示した図である。
【図2】第一実施形態に係る道路情報取得装置における運転支援処理を示すフローチャートである。
【図3】第一実施形態に係る道路情報取得装置における道路情報取得処理のうち、道路標高取得処理を示すフローチャートである。
【図4】第一実施形態に係る道路情報取得装置における道路情報取得処理のうち、道路勾配取得処理を示すフローチャートである。
【図5】第一実施形態に係る道路情報取得装置における道路情報学習処理を示すフローチャートである。
【図6】地表標高メッシュデータ中に設定された走行経路の一例を示す図である。
【図7】道路標高を演算する方法を説明するための図である。
【図8】対象座標点とその前後に存在する座標点の道路標高と距離の関係を示す線図である。
【図9】対象座標点とその前後に存在する座標点の道路標高と距離の関係を示す線図である。
【図10】第二実施形態に係る道路情報取得装置を備える車両走行支援装置のブロック構成を示した図である。
【図11】第二実施形態に係る道路情報取得装置における道路情報取得処理のうち、道路標高取得処理を示すフローチャートである。
【図12】第二実施形態に係る道路情報取得装置における道路情報取得処理のうち、道路勾配取得処理を示すフローチャートである。
【符号の説明】
【0074】
1,50…道路情報取得装置、8…データベース、13…道路情報取得部(道路情報取得手段)、17…道路情報学習部(道路情報学習手段)、18…構造物判定部(構造物判定手段)、19…地表標高取得部(地表標高取得手段)、51…センター(情報蓄積手段)。
【特許請求の範囲】
【請求項1】
地表標高を取得する地表標高取得手段と、
前記地表標高に基づいて、自車両が走行する走行経路についての第一道路情報を演算する道路情報取得手段と、
前記走行経路上に構造物が存在するか否かを判定する構造物判定手段と、を備え、
前記道路情報取得手段は、前記構造物判定手段によって前記走行経路上に前記構造物が存在すると判定された場合に、前記構造物が存在する位置について前記第一道路情報と異なる第二道路情報を取得することを特徴とする道路情報取得装置。
【請求項2】
前記道路情報取得手段は、前記自車両が有するデータベースから前記第二道路情報を取得することを特徴とする請求項1記載の道路情報取得装置。
【請求項3】
前記道路情報取得手段は、前記自車両の外部に存在する情報蓄積手段から前記第二道路情報を取得することを特徴とする請求項1記載の道路情報取得装置。
【請求項4】
前記道路情報取得手段は、前記構造物判定手段によって前記走行経路上に前記構造物が存在すると判定された場合に、前記構造物が存在する位置について前記第一道路情報を演算しないことを特徴とする請求項1〜3のいずれか一項記載の道路情報取得装置。
【請求項5】
前記自車両の走行中に、前記走行経路についての前記第二道路情報を学習する道路情報学習手段を更に備えることを特徴とする請求項1〜4のいずれか一項記載の道路情報取得装置。
【請求項6】
前記第一及び第二道路情報は、道路標高であることを特徴とする請求項1〜5のいずれか一項記載の道路情報取得装置。
【請求項7】
前記第一及び第二道路情報は、道路勾配であることを特徴とする請求項1〜5のいずれか一項記載の道路情報取得装置。
【請求項1】
地表標高を取得する地表標高取得手段と、
前記地表標高に基づいて、自車両が走行する走行経路についての第一道路情報を演算する道路情報取得手段と、
前記走行経路上に構造物が存在するか否かを判定する構造物判定手段と、を備え、
前記道路情報取得手段は、前記構造物判定手段によって前記走行経路上に前記構造物が存在すると判定された場合に、前記構造物が存在する位置について前記第一道路情報と異なる第二道路情報を取得することを特徴とする道路情報取得装置。
【請求項2】
前記道路情報取得手段は、前記自車両が有するデータベースから前記第二道路情報を取得することを特徴とする請求項1記載の道路情報取得装置。
【請求項3】
前記道路情報取得手段は、前記自車両の外部に存在する情報蓄積手段から前記第二道路情報を取得することを特徴とする請求項1記載の道路情報取得装置。
【請求項4】
前記道路情報取得手段は、前記構造物判定手段によって前記走行経路上に前記構造物が存在すると判定された場合に、前記構造物が存在する位置について前記第一道路情報を演算しないことを特徴とする請求項1〜3のいずれか一項記載の道路情報取得装置。
【請求項5】
前記自車両の走行中に、前記走行経路についての前記第二道路情報を学習する道路情報学習手段を更に備えることを特徴とする請求項1〜4のいずれか一項記載の道路情報取得装置。
【請求項6】
前記第一及び第二道路情報は、道路標高であることを特徴とする請求項1〜5のいずれか一項記載の道路情報取得装置。
【請求項7】
前記第一及び第二道路情報は、道路勾配であることを特徴とする請求項1〜5のいずれか一項記載の道路情報取得装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−107371(P2010−107371A)
【公開日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願番号】特願2008−280024(P2008−280024)
【出願日】平成20年10月30日(2008.10.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願日】平成20年10月30日(2008.10.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]