
道路情報学習装置
【課題】 道路情報の学習を効率よく確実に行うことを可能とした道路情報学習装置を提供する。
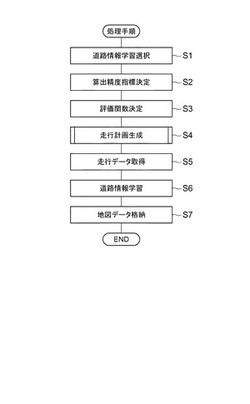
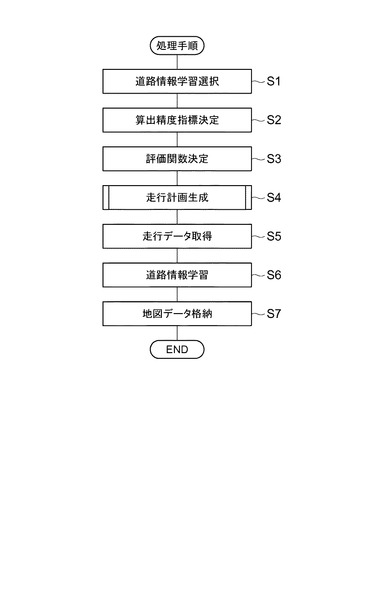
【解決手段】 学習する道路情報を選択し(ステップS1)、走行状態に応じた道路情報の算出精度を定め、指標化する(ステップS2)。指標に基づいて評価関数を求め(ステップS4)、それに基づいて道路情報推定に適した走行計画を生成する(ステップS4)。走行計画にしたがった走行時の走行情報を取得し(ステップS5)、道路情報を推定して、学習し(ステップS6)、地図情報データベース3にデータを格納する(ステップS7)。
【解決手段】 学習する道路情報を選択し(ステップS1)、走行状態に応じた道路情報の算出精度を定め、指標化する(ステップS2)。指標に基づいて評価関数を求め(ステップS4)、それに基づいて道路情報推定に適した走行計画を生成する(ステップS4)。走行計画にしたがった走行時の走行情報を取得し(ステップS5)、道路情報を推定して、学習し(ステップS6)、地図情報データベース3にデータを格納する(ステップS7)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カーブ半径、道路幅、道路勾配といった道路に関する情報を取得して学習する道路情報学習装置に関する。
【背景技術】
【0002】
低燃費、安全性、快適性等の目的に応じて最適な走行軌跡を設定して、それに応じた走行を支援する技術が知られている(例えば、特許文献1参照)。このような走行軌跡を設定するためには、予めカーブ半径、道路幅、道路勾配といった道路に関する情報(以下、「道路情報」と称する。)を精度よく取得しておく必要がある。しかしながら、現実には限定的な地域であっても全ての道路について必要な精度のデータを提供することは困難であり、仮に特定の地域について提供が可能であるとしても全ての地域についてデータを提供することは現実的ではない。そこで、少なくとも自車両が走行した道路についてその道路情報を検出、学習し、次回同一の道路を走行する際には、学習した道路情報をも用いてこの種の走行支援を行うことが提案されている。特許文献2は、そうした道路情報の学習手段を開示するものであり、自車両のカーブ通過状態がカーブ形状を推定するのに適した状態であるか否かを判定し、適している場合にのみ学習を行う技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−115465号公報
【特許文献2】特開2009−288844号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献2の技術では、通過後に通過した道路の道路情報を学習するのに適していたか否かを判定しているため、結果的に学習に適さない走行を行ったとして学習ができないことがあり、学習できる機会が少なく、学習結果を活かした走行支援を十分に活用することができないという欠点がある。
【0005】
そこで本発明は、道路情報の学習を効率よく確実に行うことを可能とした道路情報学習装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明にかかる道路情報学習装置は、走行している道路の情報を取得して学習する道路情報学習装置において、(1)取得する道路情報の取得精度を評価する評価手段と、(2)評価に基づいて道路情報取得に適した走行計画を求める走行計画立案手段と、を備えていることを特徴とする。
【0007】
すなわち、本発明にかかる道路情報学習装置は、学習したい道路情報の取得精度の評価に基づいて道路情報取得のために適した走行計画を求めるものである。
【0008】
評価手段は、走行状態に応じて道路情報の取得精度を評価するとよい。さらに、走行状態の算出精度に基づいて道路情報の取得精度を評価するとよい。
【0009】
ここで、走行情報とは、走行時に検出し、道路情報の算定に用いられる各種の車両情報であり、走行状態とは、走行計画立案にあたって用いられる走行条件候補である。
【発明の効果】
【0010】
本発明によれば、精度よく道路情報が学習できるよう走行計画を立案したうえで、その走行計画に沿った走行を誘導、案内して道路情報を求めている。このため、確実に高精度の道路情報を取得することができるので、道路情報学習の効率が向上し、学習の機会を逸することがなく、道路情報の活用機会も増加し、各種の走行支援の支援精度も向上する。
【図面の簡単な説明】
【0011】
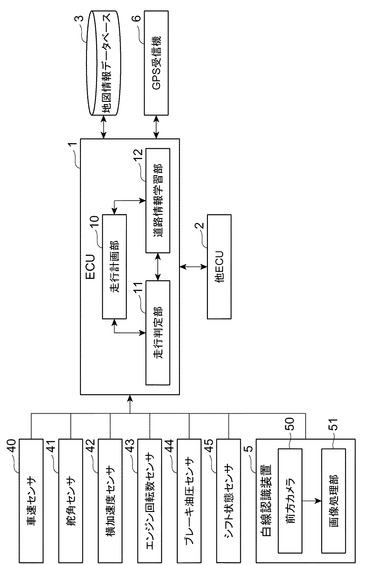
【図1】本発明にかかる道路情報学習装置を含む走行支援装置の構成を示すブロック図である。
【図2】図1の装置における道路情報学習動作を示すフローチャートである。
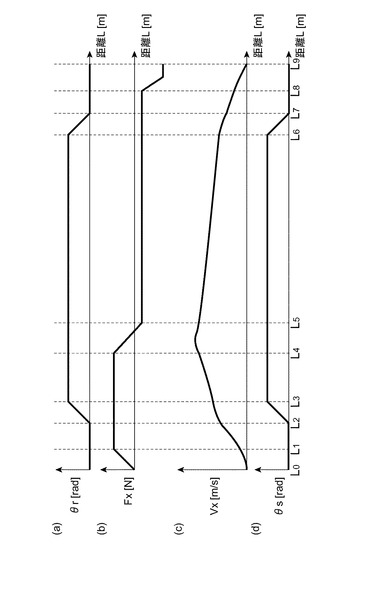
【図3】道路情報学習時の走行距離に対する走行情報、学習道路情報を示すグラフである。
【発明を実施するための形態】
【0012】
以下、添付図面を参照して本発明の好適な実施の形態について詳細に説明する。説明の理解を容易にするため、各図面において同一の構成要素に対しては可能な限り同一の参照番号を附し、重複する説明は省略する。
【0013】
図1は、本発明にかかる道路情報学習装置を含む走行支援装置の構成を示すブロック図である。この走行支援装置は、CPU、ROM、RAM等によって構成されるECU(Electrical Control Unit)1を制御装置として備える。ECU1には、内部に走行計画を立案する走行計画部10、走行情報の判定を行う走行判定部11、走行情報から道路情報を学習する道路情報学習部12を備える。
【0014】
ECU1には、また、車速センサ40、舵角センサ41、横加速度センサ42、エンジン回転数センサ43、ブレーキ油圧センサ44、シフト状態センサ45、白線認識装置5、GPS受信機6の各出力が入力されるほか、車両の挙動制御を行う他ECU2と相互通信を行う。また、地図情報データベース3のデータベースを更新、参照する機能を有している。白線認識装置5は、例えば、前方カメラ50で取得した画像情報を画像処理部51で処理することにより車両が走行しているレーンを区画する白線等を認識するものである。
【0015】
ECU1は、各センサ40〜45、GPS受信機6、白線認識装置5で取得した走行情報(車両の現在位置、車速、舵角、前後加速度、横加速度、駆動力、制動力、白線位置)に基づいて、道路情報であるカーブ半径、道路幅、道路勾配を推定して学習する機能を有する。
【0016】
以下、図2、図3を参照して、この道路情報学習動作について具体的に説明する。図2は、この道路情報学習動作のフローチャートであり、図3は、道路情報学習時の走行距離に対する走行情報、学習道路情報を示すグラフである。
【0017】
最初に道路情報のうち、ECU1の道路情報学習部12は、システムに必要な学習すべき情報を選択する(ステップS1)。最初に、道路勾配θについて学習する場合を説明する。
【0018】
続く、ステップS2では、学習すべき道路情報の走行状態に応じた取得精度を求める。道路勾配θの場合、車両の制駆動力をFx、車重をm、加減速度をa、走行抵抗をRとすると、下記の式(1)により求めることができる。
【数1】

このうち、加減速度aは、車速センサ40で検出した車速Vxから精度よく検出することができ、車重m、走行抵抗Rについても車速Vx等から比較的一様に算出することが可能である。一方、制駆動力Fxについては、エンジン回転数やシフト状態、ブレーキ油圧から算出可能であるが、車両走行状態に応じて算出精度は大きく異なってくる。そのため、道路勾配θの取得においては、制駆動力Fxの算出精度変化の影響が支配的になるので、走行状態(車両状態)に応じてFx算出精度を指標化し、これに基づいて道路勾配θの取得精度を求める。表1は、Fx算出精度指標Aの例である。ここで、Aは表記載の車両状態の関数であり、5が最も精度が高く、1は精度の低いことを示す。
【表1】
【0019】
ステップS3では、評価関数Jを定める。ここでは、評価関数Jは下記の式(2)により表される。ここで、Lは、道路位置である。
【数2】
【0020】
ステップS4では、走行計画部10が、設定した評価関数Jに基づいて、最適化処理により走行計画を定める。この最適化処理としては、既知の各種の数値解法アルゴリズム、例えば、Sequential Conjugate Gradient Restoration Algorithm (SCGRA)等を用いることができる。
【0021】
例えば、図3(a)に示されるような現在位置L0から位置L9までの道路勾配θr(未知)を求める場合、制駆動力Fxを図3(b)に示されるように変化させる走行計画を設定する。具体的には、位置L0からL1まで、停車状態から制駆動力Fxを増大させ、位置L1以降L4まで、制駆動力Fxを一定に維持する定常走行を行い、位置L4からL5まで制駆動力Fxを減少させて、位置L5からL8まではNレンジで惰行し、位置L8以降は、エンジンブレーキ、油圧ブレーキにより減速し、位置L9で停車に至るという走行計画である。
【0022】
ステップS5では、走行判定部11が、立案した走行計画に基づいて、車両を走行させるよう誘導、案内を行い、走行中の走行情報を取得する。この誘導、案内は、駆動系を自動制御して自動走行を行う方法のほか、図示していないディスプレイ装置、計器パネルやスピーカー等を用いて音声、映像等により運転者に適切な操作を案内することで走行計画に合致した走行を誘導してもよい。
【0023】
次に、道路情報学習部12が、走行データ情報に基づいて、道路情報を算出する(ステップS6)。図3(b)に示される走行計画に基づいて車速(Vx)変化として図3(c)に示される結果が得られた場合には、図3(d)に示される道路勾配取得値θsを得ることができる。道路情報学習部12は、得られた学習情報、ここでは、道路勾配取得値θsを位置情報と関連づけて地図情報データベース3に記録する(ステップS6)。
【0024】
学習情報に基づいた評価関数の設定処理(ステップS1〜S3)は予め行っていてもよく、評価関数、評価手法を予めECU1の道路情報学習部12または走行計画部10内に記憶しておいてもよい。また、走行データ取得から地図データ格納までの処理(ステップS5〜S7)は、上述した処理方法のほかに、一定区間を走行後にまとめて処理を行う方法のほか、随時処理を行ってもよい。また、走行中の走行情報に応じて走行計画を修正することも可能である。
【0025】
本実施形態によれば、精度の高い道路情報データを取得するのに適した走行計画を立案し、その走行計画に基づいた走行時に取得した走行情報に基づいて道路情報を算出するので、学習に適した道路情報を取得することができる。
【0026】
学習する道路情報が異なる場合には、ステップS2の処理が変更される。具体例としてまず道路半径rを学習する場合について説明する。道路半径rは、横加速度センサ42で検出した横加速度Gyと車速センサ40で検出した車速Vxから下記の式(3)により求めることができる。
【数3】
上述したように車速Vxは精度よく検出することができる一方、横加速度Gyは加速度が小さい領域ではノイズ成分が大きくなるため、その逆数である道路半径rの推定精度が低下する。そのため、道路半径rの算出精度指標Arは、Ar=Gyを用いることができる。こうして設定した算出精度指標Arを用いて評価関数Jを定義する。この評価関数は式(2)においてAに代えて上記算出精度指標Arを用いることになる。その他の処理は、基本的に上述した道路勾配θ推定の場合と同様である。
【0027】
走行計画立案時に用いる道路半径rとしては、地図情報データベース3に格納してある道路情報を利用するか、運転者が走行計画なしに走行した場合のデータに基づいて求めた道路情報を利用するとよい。また白線認識装置5で取得した道路情報に基づいてもよい。学習によりこれらのデータの更新を繰り返すことで、精度をより高めることができる。
【0028】
次に、道路幅wについて学習する場合を説明する。道路幅w自体は白線認識装置5の出力として求めることができるが、このとき、レーン中央位置を走行することができれば、前方カメラ50で撮像する画像に左右の不均等がなく、左右の白線(区画線)間の距離であるレーン幅をより高い精度で測定することができる。したがって、算出精度指標Awは、レーン内の位置y(中心位置を原点とする)と白線の延長方向に対する車両進行角度φから、下記の式(4)により定義できる。
【数4】
こうして設定した算出精度指標Awを用いて評価関数Jを定義する。この評価関数は式(2)においてAに代えて上記算出精度指標Awを用いることになる。その他の処理は、基本的に上述した道路勾配θ推定の場合と同様である。
【0029】
走行計画立案にあたって利用するレーン中央位置としては、白線認識装置5で道路幅を認識する位置より遠方の道路情報に基づいたレーン中央位置や、地図情報データベース3に格納されている道路幅情報、道路種別情報から算出したレーン中央位置、学習済みのレーン中央位置情報を利用するとよい。
【0030】
本発明によれば、運転支援に用いる道路情報を精度よく効率的に学習することができるため、道路情報を用いた運転支援の支援精度も向上する。
【0031】
ここでは、評価関数Jとして式(2)を用いたが、求めたい道路情報に応じて重み付けを行ったりするなど適宜変更してもよい。
【符号の説明】
【0032】
1、2…ECU、3…地図情報データベース、5…白線認識装置、6…受信機、10…走行計画部、11…走行判定部、12…道路情報学習部、40…車速センサ、41…舵角センサ、42…横加速度センサ、43…エンジン回転数センサ、44…ブレーキ油圧センサ、45…シフト状態センサ、50…前方カメラ、51…画像処理部。
【技術分野】
【0001】
本発明は、カーブ半径、道路幅、道路勾配といった道路に関する情報を取得して学習する道路情報学習装置に関する。
【背景技術】
【0002】
低燃費、安全性、快適性等の目的に応じて最適な走行軌跡を設定して、それに応じた走行を支援する技術が知られている(例えば、特許文献1参照)。このような走行軌跡を設定するためには、予めカーブ半径、道路幅、道路勾配といった道路に関する情報(以下、「道路情報」と称する。)を精度よく取得しておく必要がある。しかしながら、現実には限定的な地域であっても全ての道路について必要な精度のデータを提供することは困難であり、仮に特定の地域について提供が可能であるとしても全ての地域についてデータを提供することは現実的ではない。そこで、少なくとも自車両が走行した道路についてその道路情報を検出、学習し、次回同一の道路を走行する際には、学習した道路情報をも用いてこの種の走行支援を行うことが提案されている。特許文献2は、そうした道路情報の学習手段を開示するものであり、自車両のカーブ通過状態がカーブ形状を推定するのに適した状態であるか否かを判定し、適している場合にのみ学習を行う技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−115465号公報
【特許文献2】特開2009−288844号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献2の技術では、通過後に通過した道路の道路情報を学習するのに適していたか否かを判定しているため、結果的に学習に適さない走行を行ったとして学習ができないことがあり、学習できる機会が少なく、学習結果を活かした走行支援を十分に活用することができないという欠点がある。
【0005】
そこで本発明は、道路情報の学習を効率よく確実に行うことを可能とした道路情報学習装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明にかかる道路情報学習装置は、走行している道路の情報を取得して学習する道路情報学習装置において、(1)取得する道路情報の取得精度を評価する評価手段と、(2)評価に基づいて道路情報取得に適した走行計画を求める走行計画立案手段と、を備えていることを特徴とする。
【0007】
すなわち、本発明にかかる道路情報学習装置は、学習したい道路情報の取得精度の評価に基づいて道路情報取得のために適した走行計画を求めるものである。
【0008】
評価手段は、走行状態に応じて道路情報の取得精度を評価するとよい。さらに、走行状態の算出精度に基づいて道路情報の取得精度を評価するとよい。
【0009】
ここで、走行情報とは、走行時に検出し、道路情報の算定に用いられる各種の車両情報であり、走行状態とは、走行計画立案にあたって用いられる走行条件候補である。
【発明の効果】
【0010】
本発明によれば、精度よく道路情報が学習できるよう走行計画を立案したうえで、その走行計画に沿った走行を誘導、案内して道路情報を求めている。このため、確実に高精度の道路情報を取得することができるので、道路情報学習の効率が向上し、学習の機会を逸することがなく、道路情報の活用機会も増加し、各種の走行支援の支援精度も向上する。
【図面の簡単な説明】
【0011】
【図1】本発明にかかる道路情報学習装置を含む走行支援装置の構成を示すブロック図である。
【図2】図1の装置における道路情報学習動作を示すフローチャートである。
【図3】道路情報学習時の走行距離に対する走行情報、学習道路情報を示すグラフである。
【発明を実施するための形態】
【0012】
以下、添付図面を参照して本発明の好適な実施の形態について詳細に説明する。説明の理解を容易にするため、各図面において同一の構成要素に対しては可能な限り同一の参照番号を附し、重複する説明は省略する。
【0013】
図1は、本発明にかかる道路情報学習装置を含む走行支援装置の構成を示すブロック図である。この走行支援装置は、CPU、ROM、RAM等によって構成されるECU(Electrical Control Unit)1を制御装置として備える。ECU1には、内部に走行計画を立案する走行計画部10、走行情報の判定を行う走行判定部11、走行情報から道路情報を学習する道路情報学習部12を備える。
【0014】
ECU1には、また、車速センサ40、舵角センサ41、横加速度センサ42、エンジン回転数センサ43、ブレーキ油圧センサ44、シフト状態センサ45、白線認識装置5、GPS受信機6の各出力が入力されるほか、車両の挙動制御を行う他ECU2と相互通信を行う。また、地図情報データベース3のデータベースを更新、参照する機能を有している。白線認識装置5は、例えば、前方カメラ50で取得した画像情報を画像処理部51で処理することにより車両が走行しているレーンを区画する白線等を認識するものである。
【0015】
ECU1は、各センサ40〜45、GPS受信機6、白線認識装置5で取得した走行情報(車両の現在位置、車速、舵角、前後加速度、横加速度、駆動力、制動力、白線位置)に基づいて、道路情報であるカーブ半径、道路幅、道路勾配を推定して学習する機能を有する。
【0016】
以下、図2、図3を参照して、この道路情報学習動作について具体的に説明する。図2は、この道路情報学習動作のフローチャートであり、図3は、道路情報学習時の走行距離に対する走行情報、学習道路情報を示すグラフである。
【0017】
最初に道路情報のうち、ECU1の道路情報学習部12は、システムに必要な学習すべき情報を選択する(ステップS1)。最初に、道路勾配θについて学習する場合を説明する。
【0018】
続く、ステップS2では、学習すべき道路情報の走行状態に応じた取得精度を求める。道路勾配θの場合、車両の制駆動力をFx、車重をm、加減速度をa、走行抵抗をRとすると、下記の式(1)により求めることができる。
【数1】
このうち、加減速度aは、車速センサ40で検出した車速Vxから精度よく検出することができ、車重m、走行抵抗Rについても車速Vx等から比較的一様に算出することが可能である。一方、制駆動力Fxについては、エンジン回転数やシフト状態、ブレーキ油圧から算出可能であるが、車両走行状態に応じて算出精度は大きく異なってくる。そのため、道路勾配θの取得においては、制駆動力Fxの算出精度変化の影響が支配的になるので、走行状態(車両状態)に応じてFx算出精度を指標化し、これに基づいて道路勾配θの取得精度を求める。表1は、Fx算出精度指標Aの例である。ここで、Aは表記載の車両状態の関数であり、5が最も精度が高く、1は精度の低いことを示す。
【表1】
【0019】
ステップS3では、評価関数Jを定める。ここでは、評価関数Jは下記の式(2)により表される。ここで、Lは、道路位置である。
【数2】
【0020】
ステップS4では、走行計画部10が、設定した評価関数Jに基づいて、最適化処理により走行計画を定める。この最適化処理としては、既知の各種の数値解法アルゴリズム、例えば、Sequential Conjugate Gradient Restoration Algorithm (SCGRA)等を用いることができる。
【0021】
例えば、図3(a)に示されるような現在位置L0から位置L9までの道路勾配θr(未知)を求める場合、制駆動力Fxを図3(b)に示されるように変化させる走行計画を設定する。具体的には、位置L0からL1まで、停車状態から制駆動力Fxを増大させ、位置L1以降L4まで、制駆動力Fxを一定に維持する定常走行を行い、位置L4からL5まで制駆動力Fxを減少させて、位置L5からL8まではNレンジで惰行し、位置L8以降は、エンジンブレーキ、油圧ブレーキにより減速し、位置L9で停車に至るという走行計画である。
【0022】
ステップS5では、走行判定部11が、立案した走行計画に基づいて、車両を走行させるよう誘導、案内を行い、走行中の走行情報を取得する。この誘導、案内は、駆動系を自動制御して自動走行を行う方法のほか、図示していないディスプレイ装置、計器パネルやスピーカー等を用いて音声、映像等により運転者に適切な操作を案内することで走行計画に合致した走行を誘導してもよい。
【0023】
次に、道路情報学習部12が、走行データ情報に基づいて、道路情報を算出する(ステップS6)。図3(b)に示される走行計画に基づいて車速(Vx)変化として図3(c)に示される結果が得られた場合には、図3(d)に示される道路勾配取得値θsを得ることができる。道路情報学習部12は、得られた学習情報、ここでは、道路勾配取得値θsを位置情報と関連づけて地図情報データベース3に記録する(ステップS6)。
【0024】
学習情報に基づいた評価関数の設定処理(ステップS1〜S3)は予め行っていてもよく、評価関数、評価手法を予めECU1の道路情報学習部12または走行計画部10内に記憶しておいてもよい。また、走行データ取得から地図データ格納までの処理(ステップS5〜S7)は、上述した処理方法のほかに、一定区間を走行後にまとめて処理を行う方法のほか、随時処理を行ってもよい。また、走行中の走行情報に応じて走行計画を修正することも可能である。
【0025】
本実施形態によれば、精度の高い道路情報データを取得するのに適した走行計画を立案し、その走行計画に基づいた走行時に取得した走行情報に基づいて道路情報を算出するので、学習に適した道路情報を取得することができる。
【0026】
学習する道路情報が異なる場合には、ステップS2の処理が変更される。具体例としてまず道路半径rを学習する場合について説明する。道路半径rは、横加速度センサ42で検出した横加速度Gyと車速センサ40で検出した車速Vxから下記の式(3)により求めることができる。
【数3】
上述したように車速Vxは精度よく検出することができる一方、横加速度Gyは加速度が小さい領域ではノイズ成分が大きくなるため、その逆数である道路半径rの推定精度が低下する。そのため、道路半径rの算出精度指標Arは、Ar=Gyを用いることができる。こうして設定した算出精度指標Arを用いて評価関数Jを定義する。この評価関数は式(2)においてAに代えて上記算出精度指標Arを用いることになる。その他の処理は、基本的に上述した道路勾配θ推定の場合と同様である。
【0027】
走行計画立案時に用いる道路半径rとしては、地図情報データベース3に格納してある道路情報を利用するか、運転者が走行計画なしに走行した場合のデータに基づいて求めた道路情報を利用するとよい。また白線認識装置5で取得した道路情報に基づいてもよい。学習によりこれらのデータの更新を繰り返すことで、精度をより高めることができる。
【0028】
次に、道路幅wについて学習する場合を説明する。道路幅w自体は白線認識装置5の出力として求めることができるが、このとき、レーン中央位置を走行することができれば、前方カメラ50で撮像する画像に左右の不均等がなく、左右の白線(区画線)間の距離であるレーン幅をより高い精度で測定することができる。したがって、算出精度指標Awは、レーン内の位置y(中心位置を原点とする)と白線の延長方向に対する車両進行角度φから、下記の式(4)により定義できる。
【数4】
こうして設定した算出精度指標Awを用いて評価関数Jを定義する。この評価関数は式(2)においてAに代えて上記算出精度指標Awを用いることになる。その他の処理は、基本的に上述した道路勾配θ推定の場合と同様である。
【0029】
走行計画立案にあたって利用するレーン中央位置としては、白線認識装置5で道路幅を認識する位置より遠方の道路情報に基づいたレーン中央位置や、地図情報データベース3に格納されている道路幅情報、道路種別情報から算出したレーン中央位置、学習済みのレーン中央位置情報を利用するとよい。
【0030】
本発明によれば、運転支援に用いる道路情報を精度よく効率的に学習することができるため、道路情報を用いた運転支援の支援精度も向上する。
【0031】
ここでは、評価関数Jとして式(2)を用いたが、求めたい道路情報に応じて重み付けを行ったりするなど適宜変更してもよい。
【符号の説明】
【0032】
1、2…ECU、3…地図情報データベース、5…白線認識装置、6…受信機、10…走行計画部、11…走行判定部、12…道路情報学習部、40…車速センサ、41…舵角センサ、42…横加速度センサ、43…エンジン回転数センサ、44…ブレーキ油圧センサ、45…シフト状態センサ、50…前方カメラ、51…画像処理部。
【特許請求の範囲】
【請求項1】
走行している道路の情報を取得して学習する道路情報学習装置において、
取得する道路情報の取得精度を評価する評価手段と、
前記評価に基づいて道路情報取得に適した走行計画を求める走行計画立案手段と、
を備えていることを特徴とする道路情報学習装置。
【請求項2】
前記評価手段は、走行状態に応じて道路情報の取得精度を評価することを特徴とする請求項1記載の道路情報学習装置。
【請求項3】
前記評価手段は、前記走行状態の算出精度に基づいて前記道路情報の取得精度を評価することを特徴とする請求項2記載の道路情報学習装置。
【請求項1】
走行している道路の情報を取得して学習する道路情報学習装置において、
取得する道路情報の取得精度を評価する評価手段と、
前記評価に基づいて道路情報取得に適した走行計画を求める走行計画立案手段と、
を備えていることを特徴とする道路情報学習装置。
【請求項2】
前記評価手段は、走行状態に応じて道路情報の取得精度を評価することを特徴とする請求項1記載の道路情報学習装置。
【請求項3】
前記評価手段は、前記走行状態の算出精度に基づいて前記道路情報の取得精度を評価することを特徴とする請求項2記載の道路情報学習装置。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−173266(P2012−173266A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−38516(P2011−38516)
【出願日】平成23年2月24日(2011.2.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月24日(2011.2.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]