
道路標示測量方法及び道路線形情報生成方法
【課題】道路標示を測量する際に測量精度を確保しつつ道路標示を効率良く測量することができる道路標示測量方法及び道路線形情報生成方法を提供する。
【解決手段】道路1に標示された車線境界線22における四角形状の矩形部22aの三次元位置をトータルステーション8により測量する際に、矩形部22aの四つ角のうち対角となる一対の角部22a1,22a2がトータルステーション8から鋭角として観測される位置にトータルステーション8を設置し、角部22a1,22a2を視準点としてトータルステーション8による測量を行う。
【解決手段】道路1に標示された車線境界線22における四角形状の矩形部22aの三次元位置をトータルステーション8により測量する際に、矩形部22aの四つ角のうち対角となる一対の角部22a1,22a2がトータルステーション8から鋭角として観測される位置にトータルステーション8を設置し、角部22a1,22a2を視準点としてトータルステーション8による測量を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に提供される道路線形情報を生成するために行われる道路標示測量方法及び道路線形情報生成方法に関する。
【背景技術】
【0002】
従来、交差点内及びその近傍での車両による交通事故を防ぐために、例えば交差点の上流側に設置された光ビーコンの通信領域から交差点の停止線までの距離情報、及び灯色の切替タイミングに関する信号情報を車両に搭載された車載機に提供し、車載機がその情報に基づいて前記交差点の手前で安全に停止できるか否か、前記交差点を安全に通過できるか否かを判断し、運転手に音声などで注意を促したり、その判断に基づいて車両のブレーキ介入を実行したりする安全運転の支援制御を行う装置がある(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−293660号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
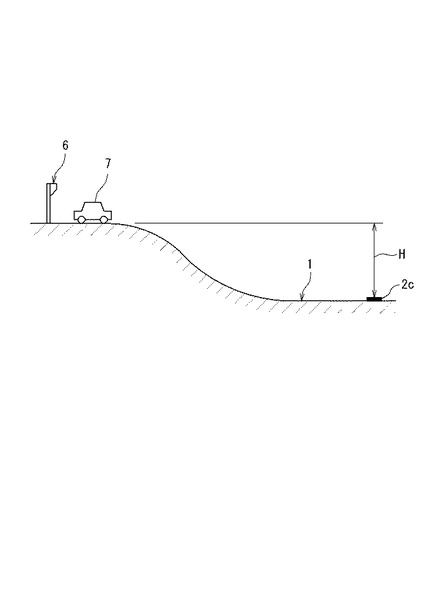
前記支援制御を正確に行うためには、交差点の停止線までの距離情報が正確である必要がある。この場合、停止線までの距離を市販の平面地図データに基づいて算出することもできるが、この平面距離は、道路の高低差H(図2参照)を考慮してないので、車両が交差点の停止線まで実際に走行する道のり距離を正確に反映していない。
【0005】
そこで、測量機器のトータルステーションを用いて道路における車線境界線等の道路標示の三次元位置を実際に測量し、この測量データに基づいて光ビーコンの通信領域から停止線までの正確な道のり距離を算出する必要がある。その際、道路標示の測量箇所を多くすればするほど正確な測量データを得ることはできるが、その反面、作業効率が低下するという問題が生じる。
【0006】
本発明は、前記問題点に鑑みてなされたものであり、道路標示を測量する際に測量精度を確保しつつ道路標示を効率良く測量することができる道路標示測量方法及び道路線形情報生成方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明の道路標示測量方法は、道路に標示された複数の角部を有する道路標示の三次元位置をトータルステーションにより測量する道路標示の測量方法であって、前記トータルステーションを、前記道路標示の角部のうち対角となる一対の角部が当該トータルステーションから鋭角として観測される位置に設置し、前記一対の角部を視準点として前記トータルステーションによる測量を行うことを特徴とする。
【0008】
本発明の道路標示測量方法によれば、複数の角部を有する道路標示の三次元位置をトータルステーションにより測量する際に、前記複数の角度のうち対角となる一対の角部を視準点としてトータルステーションによる測量を行うようにしたので、道路標示の全ての角部を視準点として測量を行う場合に比べて作業工数を低減することができる。また、トータルステーションを、前記一対の角部が鋭角として観測される位置に設置したので、トータルステーションから一対の角部を視準し易くなり、測量誤差を抑制することができる。したがって、道路標示を測量する際に測量精度を確保しつつ道路標示を効率良く測量することができる。
【0009】
(2)また、前記測量方法により測量する前記道路標示は、道路縦断方向に沿って所定間隔おきに並ぶ車線境界線であることが好ましい。この場合は、所定間隔おきに並ぶ車線境界線を効率良く測量することができる。
【0010】
(3)また、前記トータルステーションは、ノンプリズム方式での測距機能を有することが好ましい。この場合は、道路標示を測量する際に視準点として反射プリズムを設置する必要がないため、道路標示をさらに効率良く測量することができる。
【0011】
(4)また、前記トータルステーションの測量範囲は、当該トータルステーションが設置される観測点を中心として半径50m以内であることが好ましい。この場合は、トータルステーションによる測量誤差を効果的に抑制することができる。
【0012】
(5)本発明の道路線形情報生成方法は、前述の測量方法により得られた前記角部の座標に基づいて道路線形情報を生成することを特徴とする。
本発明によれば、前述した測量方法により測量された道路標示の座標に基づいて道路線形情報を正確に生成することができる。
【発明の効果】
【0013】
本発明によれば、道路標示の三次元位置をトータルステーションにより測量する際に、作業工数を低減することができるとともに、測量誤差を抑制することができる。したがって、道路標示を測量する際に測量精度を確保しつつ道路標示を効率良く測量することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る道路標示測量方法により測量が行われる道路の平面図である。
【図2】図1の道路の側断面図である。
【図3】トータルステーションから観測される車線境界線の形状を示す斜視図である。
【図4】車線境界線の矩形部の測量箇所を示す平面図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態を図面に基づいて説明する。
図1は本発明の一実施形態に係る道路標示測量方法により測量が行われる道路の平面図であり、図2は図1の道路の側断面図である。図1において、道路1には、道路交通の円滑化を図るために道路標示2が描かれている。例えば、図1に示す片側二車線道路には、道路標示2として中央線21、車線境界線22及び停止線23等が塗料等により描かれている。
【0016】
中央線21は、進行方向が異なる対向車線との境界線を示しており、実線状に描かれている。車線境界線22は、片側二車線の第1車線11と第2車線12との境界線を示しており、道路縦断方向に沿って所定間隔おきに並ぶ複数の矩形部22aにより破線状に描かれている。矩形部22aは、四角形状に形成され、複数の角部を有している。また、停止線23は、信号機3が設置された交差点4の手前に描かれており、第1及び第2車線11,12を走行する車両7が停止する停止位置を示している。道路1の幅方向両側には歩道5が設けられている。
【0017】
交差点4の上流側には、停止線23から所定距離を空けて光ビーコン6が設置されている。光ビーコン6は、第1車線11及び第2車線12にそれぞれ配置されており、車両7とその直下よりやや上流側の通信領域において、静的情報と動的情報とを含むダウンリンク信号を車両7に搭載された車載機7aへ送信する。ここで、静的情報とは、時間の経過とともに内容が変動しない情報であり、動的情報とは、時間の経過とともに内容が変動する情報である。静的情報としては、例えば道路の形状に関する道路形状情報が挙げられる。道路形状情報とは、例えば、光ビーコン6よりも少し上流側にある光ビーコン6と車載機7aとの路車間通信領域の上流端から停止線23までの道路の車線数、道路の道のり距離(前記高低差Hを考慮した距離)L1,L2等を含む情報である。この道路線形情報は、例えば各光ビーコン6に記憶されている。動的情報としては、例えば信号情報が挙げられる。信号情報とは、例えば、信号機3の黄信号開始時点、黄信号時間、赤信号時間等の信号灯色の切替タイミングに関する情報を指す。
【0018】
車載機7aは、光ビーコン6から受信した道路線形情報に基づいて、現走行位置から車両進行方向前方の停止線23までの距離Lcを求める。そして、この距離Lcと前記信号情報に基づいて、交差点4を安全に通過若しくは停止できるか否かを車載機7aが判断し、その判断に基づいて車両7に対してブレーキ介入を実行する安全運転の支援制御を行う。例えば、交差点4の手前で安全に停止できると判断した場合には、停止線23までの距離Lcに基づいて、車両7を徐々に減速させ、前記距離Lcを進んだ時点で車両7の速度がゼロとなるように支援制御する。
【0019】
次に、光ビーコン6から道路線形情報として提供される第1及び第2車線11,12の道のり距離L1,L2を算出するために行われる道路標示2の測量方法について、図面を参照しながら説明する。本実施形態では、図1に示すように、光ビーコン6よりも少し上流側にある光ビーコン6と車載機7aとの路車間通信領域の上流端から停止線23までの道路1上に描かれている車線境界線22の三次元位置を、測量機器であるトータルステーション8を用いて測量する場合について説明する。ここで、トータルステーションとは、光波測角儀(トランシット)と光波測距儀の機能を併せ持つ光波測距測角儀であり、内蔵のコンピュータにより測量データの記録、座標の計算、出力までを自動的に行うものである。本実施形態のトータルステーション8は、視準点として反射プリズムの設置を必要としない所謂ノンプリズム方式の測距機能を有している。
【0020】
図1において、まずトータルステーション8を、光ビーコン6に近い歩道5上に設置する。その際、トータルステーション8は、後述するように車線境界線22の矩形部22aの角部22a1,22a2がトータルステーション8から鋭角として観測されるように観測点Aに設置する(図3参照)。なお、観測点Aの位置座標は、光ビーコン6近傍に(好ましくは最も近くに)設置されている公共基準点Pの位置座標に基づいて求めることができる。
【0021】
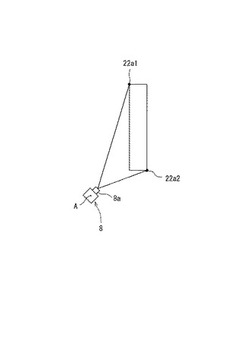
次に、観測点Aに設置されたトータルステーション8の望遠鏡8aから、車線境界線22の測量対象となる矩形部22aを測量する。図3は、望遠鏡8aから観測される矩形部22aの形状を示す斜視図である。図3に示すように、望遠鏡8aから観測される矩形部22aの形状は、長手方向両端に対角となる一対の角部22a1及び22a2があり、これらの角部22a1,22a2が鋭角となる菱形状となっている。
【0022】
図4は、車線境界線22の矩形部22aの測量箇所を示す平面図である。矩形部22aの測量は、図4に示すように、矩形部22aの四つ角のうち前記一対の角部22a1,22a2のみを視準点として前述のノンプリズム方式で測量を行う。
【0023】
具体的には、トータルステーション8の望遠鏡8aから鋭角に観測される各角部22a1,22a2を直接視準する。視準が完了すると、望遠鏡8aから各角部22a1,22a2に向けて赤外レーザ光を出射し、各角部22a1,22a2において反射した反射光を受光して測距・測角する。測距・測角後は、これによって得られた角度及び距離から各角部22a1,22a2の三次元位置の座標を計算し、この座標データを測量結果としてトータルステーション8に記録する。
【0024】
観測点Aでの測量が終了すると、トータルステーション8を観測点Aより下流側(停止線23側)に位置する観測点B,C及びDへ順次移動させて、上述と同様の手順で、各観測点B〜Dに設置されたトータルステーション8により未測量の矩形部22aを測量する。その際、観測点Bの位置座標は観測点Aの位置座標、観測点Cの位置座標は観測点Bの位置座標、観測点Dの位置座標は観測点Cの位置座標に基づいてそれぞれ求めることができる。なお、観測点B〜Dは、すべて歩道5上に設けられている。
【0025】
各観測点A〜Dにおけるトータルステーション8の測量範囲は、トータルステーション8が設置される各観測点A〜Dを中心として半径50m以内としている。したがって、各観測点A〜Dの位置は、前記測量範囲に基づいて定められる。なお、各観測点A〜Dに設置されたトータルステーション8により、矩形部22aの測量とともに、第1車線11と歩道5との境界(歩道縁)等も測量する。
【0026】
トータルステーション8により道路1の光ビーコン6から停止線23までの間の測量が完了すると、トータルステーション8に記録された座標データに基づいて、道路線形情報を生成する。具体的には、トータルステーション8に記憶された各矩形部22aの角部22a1,22a2の三次元位置に基づいて、コンピュータ上で各矩形部22aの形状を再現する。そして、再現された各矩形部22aによって特定される各車線を区切る境界線や別途測量された路肩や中央線21に関するデータに基づいてコンピュータ上に道路形状を再現させる。
そして、再現させた道路形状の各車線の左右両端の位置から車線中央を通る中心線を求め、その中心線上に設けた離散点に関する情報(離散点間の距離等)を道路線形情報に含める。
道路線形情報を受信した車両7の車載機7aは、自己が走行している車線の番号を光ビーコン6との路車間通信によって取得することができるので、受信した道路線形情報のうち、自己が走行している車線番号に対応する道路線形情報を読み出すことが可能である。従って、走行車線に対応する前記中心線上の離散点に関する情報を順番に読み込んで、それらの離散点間の距離を合計することで停止線23までの道のりを精度よく把握することが可能になる。
【0027】
以上、本発明の実施形態に係る道路標示測量方法によれば、車線境界線22における四角形状の矩形部22aの三次元位置をトータルステーション8により測量する際に、矩形部22aの四つ角のうち対角となる一対の角部22a1,22a2のみを視準点としてトータルステーション8による測量を行うようにしたので、矩形部22aの四つ角すべてを視準点として測量を行う場合に比べて作業工数を低減することができる。また、トータルステーション8を、前記角部22a1,22a2が鋭角として観測される位置に設置したので、トータルステーション8から各角部22a1,22a2を視準し易くなり、測量誤差が生じるのを抑制することができる。したがって、道路縦断方向に沿って所定間隔おきに並ぶ車線境界線22を測量する際に測量精度を確保しつつ車線境界線22を効率良く測量することができる。
【0028】
また、トータルステーション8は、ノンプリズム方式での測距機能を有しているため、車線境界線22を測量する際に、視準点として反射プリズムを設置する必要がないため、車線境界線22をさらに効率良く測量することができる。また、観測点A〜Dは全て歩道5上に設けられているため、トータルステーション8を歩道5側に設置して測量することができる。したがって、交通規制をすることなく車線境界線22を測量することができる。
【0029】
また、トータルステーション8の測量範囲は、トータルステーション8を中心として半径50m以内としているため、トータルステーション8による測量誤差を効果的に抑制することができる。
【0030】
また、本発明の実施形態に係る道路線形情報生成方法によれば、前述の道路標示測量方法により測量された車線境界線22の三次元位置の座標データに基づいて道路線形情報が生成されるため、道路線形情報を正確に生成することができる。
【0031】
なお、今回開示された実施の形態はすべての点で例示であって制限的なものでないと考えられるべきである。本発明の範囲は、上記した意味ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味、及び範囲内でのすべての変更が含まれることが意図される。
【0032】
例えば、道路標示2の測量方法は、破線状の車線境界線22以外に、停止線23や他の複数の角部を有する道路標示(例えば「横断歩道又は自転車横断帯あり」を示す菱形状のマーク等)の測量にも適用することができる。
また、トータルステーション8による測量は、ノンプリズム方式以外に、反射プリズムを使用するプリズム方式で行うことも可能である。
【0033】
さらに、本発明の道路標示測量方法により測量された測量結果に基づいて生成された道路線形情報は、車両6に対してブレーキ介入を実行する支援制御に用いられているが、車両6を運転しているドライバに停止や減速を促す警告を音声によって出力したり、車内に搭載したモニタに表示させる支援制御に用いられてもよい。
【符号の説明】
【0034】
1 道路
2 道路標示
8 トータルステーション
22 車線境界線
22a1,22a2 角部
A〜D 観測点
【技術分野】
【0001】
本発明は、車両に提供される道路線形情報を生成するために行われる道路標示測量方法及び道路線形情報生成方法に関する。
【背景技術】
【0002】
従来、交差点内及びその近傍での車両による交通事故を防ぐために、例えば交差点の上流側に設置された光ビーコンの通信領域から交差点の停止線までの距離情報、及び灯色の切替タイミングに関する信号情報を車両に搭載された車載機に提供し、車載機がその情報に基づいて前記交差点の手前で安全に停止できるか否か、前記交差点を安全に通過できるか否かを判断し、運転手に音声などで注意を促したり、その判断に基づいて車両のブレーキ介入を実行したりする安全運転の支援制御を行う装置がある(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−293660号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記支援制御を正確に行うためには、交差点の停止線までの距離情報が正確である必要がある。この場合、停止線までの距離を市販の平面地図データに基づいて算出することもできるが、この平面距離は、道路の高低差H(図2参照)を考慮してないので、車両が交差点の停止線まで実際に走行する道のり距離を正確に反映していない。
【0005】
そこで、測量機器のトータルステーションを用いて道路における車線境界線等の道路標示の三次元位置を実際に測量し、この測量データに基づいて光ビーコンの通信領域から停止線までの正確な道のり距離を算出する必要がある。その際、道路標示の測量箇所を多くすればするほど正確な測量データを得ることはできるが、その反面、作業効率が低下するという問題が生じる。
【0006】
本発明は、前記問題点に鑑みてなされたものであり、道路標示を測量する際に測量精度を確保しつつ道路標示を効率良く測量することができる道路標示測量方法及び道路線形情報生成方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明の道路標示測量方法は、道路に標示された複数の角部を有する道路標示の三次元位置をトータルステーションにより測量する道路標示の測量方法であって、前記トータルステーションを、前記道路標示の角部のうち対角となる一対の角部が当該トータルステーションから鋭角として観測される位置に設置し、前記一対の角部を視準点として前記トータルステーションによる測量を行うことを特徴とする。
【0008】
本発明の道路標示測量方法によれば、複数の角部を有する道路標示の三次元位置をトータルステーションにより測量する際に、前記複数の角度のうち対角となる一対の角部を視準点としてトータルステーションによる測量を行うようにしたので、道路標示の全ての角部を視準点として測量を行う場合に比べて作業工数を低減することができる。また、トータルステーションを、前記一対の角部が鋭角として観測される位置に設置したので、トータルステーションから一対の角部を視準し易くなり、測量誤差を抑制することができる。したがって、道路標示を測量する際に測量精度を確保しつつ道路標示を効率良く測量することができる。
【0009】
(2)また、前記測量方法により測量する前記道路標示は、道路縦断方向に沿って所定間隔おきに並ぶ車線境界線であることが好ましい。この場合は、所定間隔おきに並ぶ車線境界線を効率良く測量することができる。
【0010】
(3)また、前記トータルステーションは、ノンプリズム方式での測距機能を有することが好ましい。この場合は、道路標示を測量する際に視準点として反射プリズムを設置する必要がないため、道路標示をさらに効率良く測量することができる。
【0011】
(4)また、前記トータルステーションの測量範囲は、当該トータルステーションが設置される観測点を中心として半径50m以内であることが好ましい。この場合は、トータルステーションによる測量誤差を効果的に抑制することができる。
【0012】
(5)本発明の道路線形情報生成方法は、前述の測量方法により得られた前記角部の座標に基づいて道路線形情報を生成することを特徴とする。
本発明によれば、前述した測量方法により測量された道路標示の座標に基づいて道路線形情報を正確に生成することができる。
【発明の効果】
【0013】
本発明によれば、道路標示の三次元位置をトータルステーションにより測量する際に、作業工数を低減することができるとともに、測量誤差を抑制することができる。したがって、道路標示を測量する際に測量精度を確保しつつ道路標示を効率良く測量することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る道路標示測量方法により測量が行われる道路の平面図である。
【図2】図1の道路の側断面図である。
【図3】トータルステーションから観測される車線境界線の形状を示す斜視図である。
【図4】車線境界線の矩形部の測量箇所を示す平面図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態を図面に基づいて説明する。
図1は本発明の一実施形態に係る道路標示測量方法により測量が行われる道路の平面図であり、図2は図1の道路の側断面図である。図1において、道路1には、道路交通の円滑化を図るために道路標示2が描かれている。例えば、図1に示す片側二車線道路には、道路標示2として中央線21、車線境界線22及び停止線23等が塗料等により描かれている。
【0016】
中央線21は、進行方向が異なる対向車線との境界線を示しており、実線状に描かれている。車線境界線22は、片側二車線の第1車線11と第2車線12との境界線を示しており、道路縦断方向に沿って所定間隔おきに並ぶ複数の矩形部22aにより破線状に描かれている。矩形部22aは、四角形状に形成され、複数の角部を有している。また、停止線23は、信号機3が設置された交差点4の手前に描かれており、第1及び第2車線11,12を走行する車両7が停止する停止位置を示している。道路1の幅方向両側には歩道5が設けられている。
【0017】
交差点4の上流側には、停止線23から所定距離を空けて光ビーコン6が設置されている。光ビーコン6は、第1車線11及び第2車線12にそれぞれ配置されており、車両7とその直下よりやや上流側の通信領域において、静的情報と動的情報とを含むダウンリンク信号を車両7に搭載された車載機7aへ送信する。ここで、静的情報とは、時間の経過とともに内容が変動しない情報であり、動的情報とは、時間の経過とともに内容が変動する情報である。静的情報としては、例えば道路の形状に関する道路形状情報が挙げられる。道路形状情報とは、例えば、光ビーコン6よりも少し上流側にある光ビーコン6と車載機7aとの路車間通信領域の上流端から停止線23までの道路の車線数、道路の道のり距離(前記高低差Hを考慮した距離)L1,L2等を含む情報である。この道路線形情報は、例えば各光ビーコン6に記憶されている。動的情報としては、例えば信号情報が挙げられる。信号情報とは、例えば、信号機3の黄信号開始時点、黄信号時間、赤信号時間等の信号灯色の切替タイミングに関する情報を指す。
【0018】
車載機7aは、光ビーコン6から受信した道路線形情報に基づいて、現走行位置から車両進行方向前方の停止線23までの距離Lcを求める。そして、この距離Lcと前記信号情報に基づいて、交差点4を安全に通過若しくは停止できるか否かを車載機7aが判断し、その判断に基づいて車両7に対してブレーキ介入を実行する安全運転の支援制御を行う。例えば、交差点4の手前で安全に停止できると判断した場合には、停止線23までの距離Lcに基づいて、車両7を徐々に減速させ、前記距離Lcを進んだ時点で車両7の速度がゼロとなるように支援制御する。
【0019】
次に、光ビーコン6から道路線形情報として提供される第1及び第2車線11,12の道のり距離L1,L2を算出するために行われる道路標示2の測量方法について、図面を参照しながら説明する。本実施形態では、図1に示すように、光ビーコン6よりも少し上流側にある光ビーコン6と車載機7aとの路車間通信領域の上流端から停止線23までの道路1上に描かれている車線境界線22の三次元位置を、測量機器であるトータルステーション8を用いて測量する場合について説明する。ここで、トータルステーションとは、光波測角儀(トランシット)と光波測距儀の機能を併せ持つ光波測距測角儀であり、内蔵のコンピュータにより測量データの記録、座標の計算、出力までを自動的に行うものである。本実施形態のトータルステーション8は、視準点として反射プリズムの設置を必要としない所謂ノンプリズム方式の測距機能を有している。
【0020】
図1において、まずトータルステーション8を、光ビーコン6に近い歩道5上に設置する。その際、トータルステーション8は、後述するように車線境界線22の矩形部22aの角部22a1,22a2がトータルステーション8から鋭角として観測されるように観測点Aに設置する(図3参照)。なお、観測点Aの位置座標は、光ビーコン6近傍に(好ましくは最も近くに)設置されている公共基準点Pの位置座標に基づいて求めることができる。
【0021】
次に、観測点Aに設置されたトータルステーション8の望遠鏡8aから、車線境界線22の測量対象となる矩形部22aを測量する。図3は、望遠鏡8aから観測される矩形部22aの形状を示す斜視図である。図3に示すように、望遠鏡8aから観測される矩形部22aの形状は、長手方向両端に対角となる一対の角部22a1及び22a2があり、これらの角部22a1,22a2が鋭角となる菱形状となっている。
【0022】
図4は、車線境界線22の矩形部22aの測量箇所を示す平面図である。矩形部22aの測量は、図4に示すように、矩形部22aの四つ角のうち前記一対の角部22a1,22a2のみを視準点として前述のノンプリズム方式で測量を行う。
【0023】
具体的には、トータルステーション8の望遠鏡8aから鋭角に観測される各角部22a1,22a2を直接視準する。視準が完了すると、望遠鏡8aから各角部22a1,22a2に向けて赤外レーザ光を出射し、各角部22a1,22a2において反射した反射光を受光して測距・測角する。測距・測角後は、これによって得られた角度及び距離から各角部22a1,22a2の三次元位置の座標を計算し、この座標データを測量結果としてトータルステーション8に記録する。
【0024】
観測点Aでの測量が終了すると、トータルステーション8を観測点Aより下流側(停止線23側)に位置する観測点B,C及びDへ順次移動させて、上述と同様の手順で、各観測点B〜Dに設置されたトータルステーション8により未測量の矩形部22aを測量する。その際、観測点Bの位置座標は観測点Aの位置座標、観測点Cの位置座標は観測点Bの位置座標、観測点Dの位置座標は観測点Cの位置座標に基づいてそれぞれ求めることができる。なお、観測点B〜Dは、すべて歩道5上に設けられている。
【0025】
各観測点A〜Dにおけるトータルステーション8の測量範囲は、トータルステーション8が設置される各観測点A〜Dを中心として半径50m以内としている。したがって、各観測点A〜Dの位置は、前記測量範囲に基づいて定められる。なお、各観測点A〜Dに設置されたトータルステーション8により、矩形部22aの測量とともに、第1車線11と歩道5との境界(歩道縁)等も測量する。
【0026】
トータルステーション8により道路1の光ビーコン6から停止線23までの間の測量が完了すると、トータルステーション8に記録された座標データに基づいて、道路線形情報を生成する。具体的には、トータルステーション8に記憶された各矩形部22aの角部22a1,22a2の三次元位置に基づいて、コンピュータ上で各矩形部22aの形状を再現する。そして、再現された各矩形部22aによって特定される各車線を区切る境界線や別途測量された路肩や中央線21に関するデータに基づいてコンピュータ上に道路形状を再現させる。
そして、再現させた道路形状の各車線の左右両端の位置から車線中央を通る中心線を求め、その中心線上に設けた離散点に関する情報(離散点間の距離等)を道路線形情報に含める。
道路線形情報を受信した車両7の車載機7aは、自己が走行している車線の番号を光ビーコン6との路車間通信によって取得することができるので、受信した道路線形情報のうち、自己が走行している車線番号に対応する道路線形情報を読み出すことが可能である。従って、走行車線に対応する前記中心線上の離散点に関する情報を順番に読み込んで、それらの離散点間の距離を合計することで停止線23までの道のりを精度よく把握することが可能になる。
【0027】
以上、本発明の実施形態に係る道路標示測量方法によれば、車線境界線22における四角形状の矩形部22aの三次元位置をトータルステーション8により測量する際に、矩形部22aの四つ角のうち対角となる一対の角部22a1,22a2のみを視準点としてトータルステーション8による測量を行うようにしたので、矩形部22aの四つ角すべてを視準点として測量を行う場合に比べて作業工数を低減することができる。また、トータルステーション8を、前記角部22a1,22a2が鋭角として観測される位置に設置したので、トータルステーション8から各角部22a1,22a2を視準し易くなり、測量誤差が生じるのを抑制することができる。したがって、道路縦断方向に沿って所定間隔おきに並ぶ車線境界線22を測量する際に測量精度を確保しつつ車線境界線22を効率良く測量することができる。
【0028】
また、トータルステーション8は、ノンプリズム方式での測距機能を有しているため、車線境界線22を測量する際に、視準点として反射プリズムを設置する必要がないため、車線境界線22をさらに効率良く測量することができる。また、観測点A〜Dは全て歩道5上に設けられているため、トータルステーション8を歩道5側に設置して測量することができる。したがって、交通規制をすることなく車線境界線22を測量することができる。
【0029】
また、トータルステーション8の測量範囲は、トータルステーション8を中心として半径50m以内としているため、トータルステーション8による測量誤差を効果的に抑制することができる。
【0030】
また、本発明の実施形態に係る道路線形情報生成方法によれば、前述の道路標示測量方法により測量された車線境界線22の三次元位置の座標データに基づいて道路線形情報が生成されるため、道路線形情報を正確に生成することができる。
【0031】
なお、今回開示された実施の形態はすべての点で例示であって制限的なものでないと考えられるべきである。本発明の範囲は、上記した意味ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味、及び範囲内でのすべての変更が含まれることが意図される。
【0032】
例えば、道路標示2の測量方法は、破線状の車線境界線22以外に、停止線23や他の複数の角部を有する道路標示(例えば「横断歩道又は自転車横断帯あり」を示す菱形状のマーク等)の測量にも適用することができる。
また、トータルステーション8による測量は、ノンプリズム方式以外に、反射プリズムを使用するプリズム方式で行うことも可能である。
【0033】
さらに、本発明の道路標示測量方法により測量された測量結果に基づいて生成された道路線形情報は、車両6に対してブレーキ介入を実行する支援制御に用いられているが、車両6を運転しているドライバに停止や減速を促す警告を音声によって出力したり、車内に搭載したモニタに表示させる支援制御に用いられてもよい。
【符号の説明】
【0034】
1 道路
2 道路標示
8 トータルステーション
22 車線境界線
22a1,22a2 角部
A〜D 観測点
【特許請求の範囲】
【請求項1】
道路に標示された複数の角部を有する道路標示の三次元位置をトータルステーションにより測量する道路標示の測量方法であって、
前記トータルステーションを、前記道路標示の角部のうち対角となる一対の角部が当該トータルステーションから鋭角として観測される位置に設置し、
前記一対の角部を視準点として前記トータルステーションによる測量を行うことを特徴とする道路標示測量方法。
【請求項2】
前記道路標示が、道路縦断方向に沿って所定間隔おきに並ぶ車線境界線である請求項1に記載の道路標示測量方法。
【請求項3】
前記トータルステーションは、ノンプリズム方式での測距機能を有する請求項1又は2に記載の道路標示測量方法。
【請求項4】
前記トータルステーションの測量範囲が、当該トータルステーションが設置される観測点を中心として半径50m以内である請求項3に記載の道路標示測量方法。
【請求項5】
請求項1〜4のいずれか一項に記載の測量方法により得られた前記角部の座標に基づいて道路線形情報を生成することを特徴とする道路線形情報生成方法。
【請求項1】
道路に標示された複数の角部を有する道路標示の三次元位置をトータルステーションにより測量する道路標示の測量方法であって、
前記トータルステーションを、前記道路標示の角部のうち対角となる一対の角部が当該トータルステーションから鋭角として観測される位置に設置し、
前記一対の角部を視準点として前記トータルステーションによる測量を行うことを特徴とする道路標示測量方法。
【請求項2】
前記道路標示が、道路縦断方向に沿って所定間隔おきに並ぶ車線境界線である請求項1に記載の道路標示測量方法。
【請求項3】
前記トータルステーションは、ノンプリズム方式での測距機能を有する請求項1又は2に記載の道路標示測量方法。
【請求項4】
前記トータルステーションの測量範囲が、当該トータルステーションが設置される観測点を中心として半径50m以内である請求項3に記載の道路標示測量方法。
【請求項5】
請求項1〜4のいずれか一項に記載の測量方法により得られた前記角部の座標に基づいて道路線形情報を生成することを特徴とする道路線形情報生成方法。
【図1】



【図2】
【図3】

【図4】

【図2】
【図3】
【図4】
【公開番号】特開2011−242151(P2011−242151A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2010−111861(P2010−111861)
【出願日】平成22年5月14日(2010.5.14)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成22年5月14日(2010.5.14)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]