
道路状況把握装置及び道路状況把握方法
【課題】
道路状況把握装置を構成するカメラ及び無線装置の検出異常を相互に判定することができる道路状況把握装置及び道路状況把握方法を提供することである。
【解決手段】
上記課題を達成するために、実施形態の道路状況把握装置は、監視区域を撮影するカメラと、前記カメラで撮影された画像から車両を検出する第1の車両検出手段と、監視区域内に進入した車両との無線通信を行う通信装置と、前記通信装置による車両との無線通信により車両を検出する第2の車両検出手段と、前記第1の車両検出手段と前記第2の車両検出手段の検出結果に基づいて道路状況を把握する手段と、前記把握手段で把握した道路状況を前記通信装置によって車両に報知する報知手段と、前記第1の車両検出手段と前記第2の車両検出手段の車両の検出結果に基づいて前記カメラの検出異常と前記通信装置の検出異常とを、相互に判定する検出異常判定手段と、を有することを特徴とする。
道路状況把握装置を構成するカメラ及び無線装置の検出異常を相互に判定することができる道路状況把握装置及び道路状況把握方法を提供することである。
【解決手段】
上記課題を達成するために、実施形態の道路状況把握装置は、監視区域を撮影するカメラと、前記カメラで撮影された画像から車両を検出する第1の車両検出手段と、監視区域内に進入した車両との無線通信を行う通信装置と、前記通信装置による車両との無線通信により車両を検出する第2の車両検出手段と、前記第1の車両検出手段と前記第2の車両検出手段の検出結果に基づいて道路状況を把握する手段と、前記把握手段で把握した道路状況を前記通信装置によって車両に報知する報知手段と、前記第1の車両検出手段と前記第2の車両検出手段の車両の検出結果に基づいて前記カメラの検出異常と前記通信装置の検出異常とを、相互に判定する検出異常判定手段と、を有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、道路状況把握装置及び道路状況把握方法に関する。
【背景技術】
【0002】
道路状況把握装置とは、高速道路の見通しの悪いカーブ等において、カメラを1台または複数台設置し、当該位置の道路状況をカメラで撮影して、車両通過情報や渋滞情報等を検出し、無線装置による車両との送受信によりカーブへの進入車両にそれらの情報を伝達するものである。
【0003】
この道路状況把握装置に用いられるカメラの故障やカメラからのデータ通信異常は、現状でもカメラを制御及び監視する上位の装置側で検出することが可能である。
【0004】
しかしながら、例えばカメラが布で覆われてしまった場合等、カメラ自体やデータ通信系に異常がない状態では、カーブ等の画像データを得られないにもかかわらず、画像データの検出異常と判定することができず、車両通過情報や渋滞情報等の検出処理を続けるという問題があった。
【0005】
また、無線装置でも無線装置の故障を診断する機能が正常であれば、無線の送信は継続する。しかしながら、無線装置に何らかの検出異常が発生して、車両からの通信情報を受信できなくなっても、車両が通過していないのか、または車両からの通信情報を受信できなくなっているのかを判定することは困難であった。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−44502号公報
【特許文献2】特開2010−61435号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明が解決しようとする課題は、道路状況把握装置を構成するカメラ及び無線装置の検出異常を相互に判定することができる道路状況把握装置及び道路状況把握方法を提供することである。
【課題を解決するための手段】
【0008】
上記課題を達成するために、実施形態の道路状況把握装置は、道路上の監視区域の近傍に設けられ、監視区域を撮影するカメラと、前記カメラで撮影された画像の画像処理により車両を検出する第1の車両検出手段と、道路上の監視区域の近傍に設けられ、監視区域内に進入した車両との無線通信を行う通信装置と、前記通信装置による車両との無線通信により前記監視区域内への車両の進入状況を検出する第2の車両検出手段と、前記第1の車両検出手段の車両の検出結果と前記第2の車両検出手段の車両の検出結果とに基づいて道路状況を把握する手段と、前記把握手段で把握した道路状況を前記通信装置によって車両に報知する報知手段と、前記第1の車両検出手段の車両の検出結果と前記第2の車両検出手段の車両の検出結果とに基づいて前記カメラの検出異常と前記通信装置の検出異常とを、相互に判定する検出異常判定手段と、を有することを特徴とする。
【0009】
また、実施形態の道路状況把握方法は、監視区域の近傍に設置されたカメラで道路上の監視区域を撮影し、前記カメラで撮影された画像の画像処理により車両を検出し、通信装置により道路上の監視区域内に進入した車両との無線通信を行い、前記通信装置による車両との無線通信により車両の進入状況を検出し、前記カメラによる車両の検出結果と前記通信装置による車両の検出結果とに基づいて道路状況を把握して、前記通信装置により道路状況を車両に報知し、前記カメラによる車両の検出結果と前記通信装置による車両の検出結果とに基づいて前記カメラの検出異常と前記通信装置の検出異常とを相互に判定することを特徴とする。
【図面の簡単な説明】
【0010】
【図1】実施形態の道路状況把握装置のシステム構成図。
【図2】実施形態のカメラで撮影した画像から道路上の監視区域の交通状況を判別する手段のフローチャート。
【図3】実施形態のカメラ及び無線装置の検出異常を相互に判定する手段のフローチャート。
【図4】実施形態のカメラの検出異常を示すシステム構成図。
【発明を実施するための形態】
【0011】
以下、実施形態の道路状況把握装置を図1から図4を参照して説明する。
【0012】
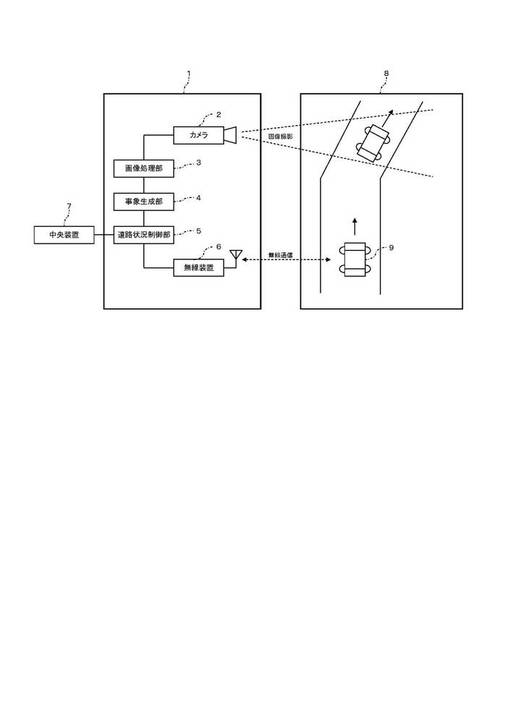
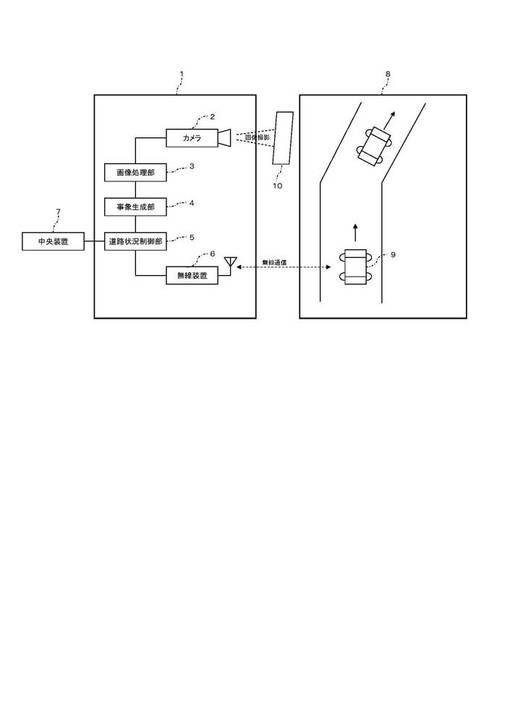
図1は、実施形態の道路状況把握装置のシステム構成図である。
【0013】
図1に示すように、道路状況把握装置1は、道路上の監視区域8の近傍(車両の通行を妨害しない道路上の位置)に設置され、監視区域内を撮影するカメラ2、カメラ2からの撮影画像が入力され、その撮影画像を記録したり、画像処理を行うことにより車両9を検出する画像処理部3(車両検出手段)を有している。また道路状況把握装置1は、カメラ2からの撮影画像及び画像処理部3が記録している撮影画像が入力され、それらの画像処理により交通状況の判別処理を行う車両検出手段としての事象生成部4を有している。
【0014】
さらに、道路状況把握装置1には、監視区域8の近傍(車両の通行を妨害しない道路上の位置)に設置され、監視区域内に車両9が進入したときに車両9との無線通信により監視区域内への車両9の進入状況を検出する車両検出手段としての無線装置6が設けられている。そして、事象生成部4による車両9の検出結果及び無線装置6による車両9の検出結果が道路状況制御部5に入力され、それらの車両9の検出結果に基づいて道路状況制御部5は車両通過情報や渋滞情報等の道路状況を把握する。道路状況制御部5は、この把握した道路状況を無線装置6によって車両9に報知するようになっている。
【0015】
さらに道路状況制御部5は、事象生成部4による車両9の検出結果と無線装置6による車両9の検出結果とを比較し、それら検出結果の差異を検出することにより、カメラ2及び無線装置6の検出異常を相互に判定する(検出異常判定手段)。
【0016】
道路状況把握装置1には、道路状況制御部5の検出結果が送信される中央装置7が接続され、道路全体の状況が管理されるようになっている。
【0017】
このような道路状況把握装置1は、例えば交差点のような交通量が多い場所や高速道路の見通しの悪いカーブ等に設置され、これらの場所の交通状況、例えば渋滞状態、停止車両の有無、落下物等による危険の有無等を監視するようになっている。
【0018】
[画像処理による車両検出]
次に、画像処理による車両検出(第1の車両検出手段)について図2を参照して説明する。
【0019】
カメラ2は、道路状況把握装置1によって交通状況を監視する監視区域8の近傍に設置され、道路上の監視区域8及び車両9等を撮影する。
【0020】
画像処理部3には、監視区域8の交通状況を判別するために用いられる背景画像が予め記録(格納)される。また、画像処理部3には、カメラ2の状態を判別するための基準となる基準画像が予め記録(格納)される。
【0021】
この背景画像及び基準画像は、例えば一定時間前にカメラ2によって撮影された複数の画像(映像)を用いて作成される。背景画像及び基準画像は、同一座標における複数の画像の輝度を、当該輝度の高低によりソートし、当該ソート順位が中間の輝度を出力するメディアン処理を画素毎に実行することにより作成される。また、背景画像及び基準画像は、例えば通行車両または落下物等を含まない画像である。
【0022】
また、画像処理部3には、カメラ2によって撮影される画像における座標(画像座標)を、当該カメラ2からの絶対距離(実際の距離)に変換するために用いられる変換テーブルが記録されている。
【0023】
事象生成部4は、カメラ2によって撮影された画像(映像)及び画像処理部3に記録されている背景画像に基づいて、監視区域8の交通状況、例えば渋滞、停止車両または落下物の有無等を判別する。
【0024】
事象生成部4は、画像処理部3に記録されている背景画像及びカメラ2によって撮影された画像(以下、監視画像という)を比較し、画像間の輝度差を算出した差分画像を生成する。差分画像は、比較された背景画像及び監視画像において異なる箇所を含む画像である。
【0025】
事象生成部4は、生成された差分画像の値(輝度差)が予め定められている閾値以上の領域を抽出する。この抽出された領域が例えば車両9(領域)として認知される。これにより、事象生成部4は、道路上の監視区域8の交通状況を判別する。
【0026】
事象生成部4は、この判別した車両9の検出結果を道路状況制御部5に出力する。
【0027】
また、事象生成部4は、監視画像と画像処理部3に記録されている基準画像との差を求める。すなわち、監視画像及び基準画像間の輝度差を算出することによって差分画像を取得する。
【0028】
事象生成部4は、取得された差分画像に基づいて、カメラ2の状態を判別する。事象生成部4は、カメラ2の状態として、例えばカメラ2の設置位置が変化しているか、画像の明るさが変化しているか、またはカメラ2のレンズに付着物が付着しているか等を判別する。
【0029】
道路状況制御部5は、事象生成部4によって判別されたカメラ2の状態に基づいて、当該カメラ2を管理する。
【0030】
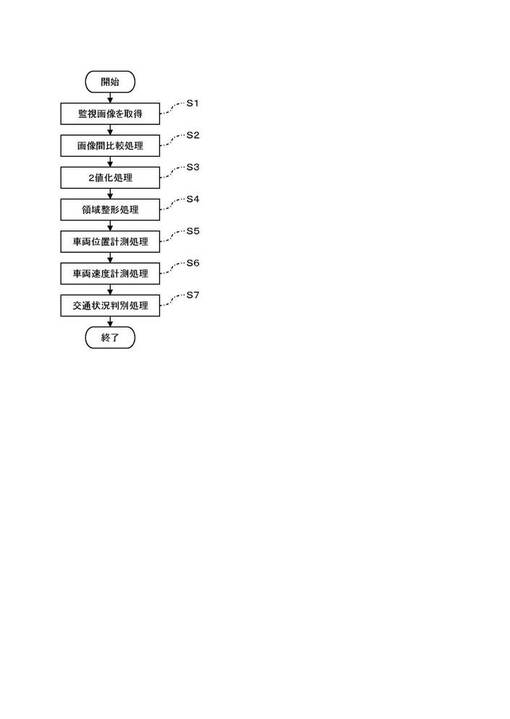
次に、図1に示す道路状況把握装置1に備えられる事象生成部4による、カメラ2で撮影した画像から道路上の監視区域8の交通状況を判別する手段の処理手順について図2のフローチャートを参照して説明する。
【0031】
まず、事象生成部4は、監視画像を取得する(ステップS1)、とともに、事象生成部4は、画像処理部3に記録されている背景画像を取得する。
【0032】
次に、事象生成部4は、取得された監視画像及び背景画像を比較する処理(画像間比較処理)を実行する(ステップS2)。これにより、事象生成部4は、監視画像及び背景画像の画像間の輝度差を算出した差分画像を取得する(求める)。
【0033】
事象生成部4は、取得された差分画像の値(輝度差)が予め定められた閾値(任意の閾値)以上の領域を抽出する処理(2値化処理)を実行する(ステップS3)。
【0034】
次に、事象生成部4は、抽出された領域に対して膨張処理または縮小処理を施す。これにより、事象生成部4は、抽出された領域の形を整える処理(領域整形処理)を実行する(ステップS4)。
【0035】
事象生成部4では、上記したように抽出された領域が例えば車両領域として認知される。つまり、事象生成部4においては、抽出された領域に基づいて道路上の監視区域8の交通状況が判別される。
【0036】
事象生成部4は、画像処理部3に記録されている変換テーブルを用いて、車両領域の画像座標をカメラ2からの絶対距離に変換する。これにより、事象生成部4は、車両9の位置を計測する処理(車両位置計測処理)を実行する(ステップS5)。
【0037】
次に、事象生成部4は、計測された時系列の車両位置と、その時間間隔から車両速度を計測する処理(車両速度計測処理)を実行する(ステップS6)。
【0038】
事象生成部4は、計測された車両9(領域)の位置、車両速度及び抽出された領域が道路に対して占める割合に基づいて、例えば渋滞、停止車両または落下物の有無のような交通状況を判別する処理(交通状況判別処理)を実行する(ステップS7)。これにより、道路上の監視区域8の道路状況を検出する。
【0039】
[無線通信による車両検出]
次に、無線通信による車両検出(第2の車両検出手段)について説明する。
【0040】
無線装置6(通信装置)は、アンテナ、送信装置、受信装置及び付属装置などから構成され、道路状況把握装置1によって交通状況が監視される監視区域8の近傍に設置されている。この無線装置6は監視区域内へ進入した車両9と無線通信を行い、車両9からの識別情報などを受信することにより監視区域内への車両9の進入状況を検出する。
【0041】
無線装置6は、検出した進入状況を道路状況制御部5に出力する。
【0042】
無線装置6と車両9との無線通信の方式の一例としては、無線装置6(基地局)と車両9(移動局)との間を、フレーム毎に時分割多元接続方式(TDMA:Time Division Multiple Access)で行われる。
【0043】
TDMA方式で伝送されるフレームは、FCMS(フレームコントロールメッセージスロット)、MDS(メッセージデータスロット)、ACTS(アクチベーションスロット)、WCNS(ワイヤレスコールナンバースロット)等から構成される。
【0044】
FCMSは、無線装置6がフレーム制御情報と後続するスロット(例えば、ACTS、MDS、WCNS)の割付情報とから構成されるFCMC(フレームコントロールメッセージチャネル) を送信するための通信制御用スロットである。
【0045】
ACTSは、車両9から送信される接続要求を受信するための要求受信スロットである。MDSは、接続要求の送信元の車両9との間でデータを送受信するスロットである。WCNSは、車両9の車載器を識別するためのWCN(ワイヤレスコールナンバー: ETCの車載器等に付された車両番号)を取得するためのスロットである。
【0046】
WCNは、車載器を固有に識別するための固有識別番号(車載器ID)として用いられるため、無線装置6は、WCNを識別情報などの無線通信情報として受信することで車両9を固有に識別し、車両9を検出する。この無線通信により、例えば監視区域8の車両通過の情報や、車両9の車載器に蓄積された位置・時刻等のデータを得る。これらの無線通信による情報やカメラ2の撮像画像による交通状況の判別により道路状況制御部5は、渋滞情報等の道路状況を把握する(道路状況を把握する手段)。
【0047】
道路状況把握装置1は、道路状況制御部5で把握した道路状況を無線装置6から車両9に報知する(通信装置によって車両に報知する報知手段)。
【0048】
[検出異常判定]
次に、検出異常判定手段を説明する。
【0049】
道路状況制御部5は、画像処理による事象生成部4からの車両9の検出結果と無線通信による無線装置6からの車両9の検出結果とを比較して、車両9の検出結果の差異を検出する。これにより、カメラ2及び無線装置6の検出異常を相互に判定する。
【0050】
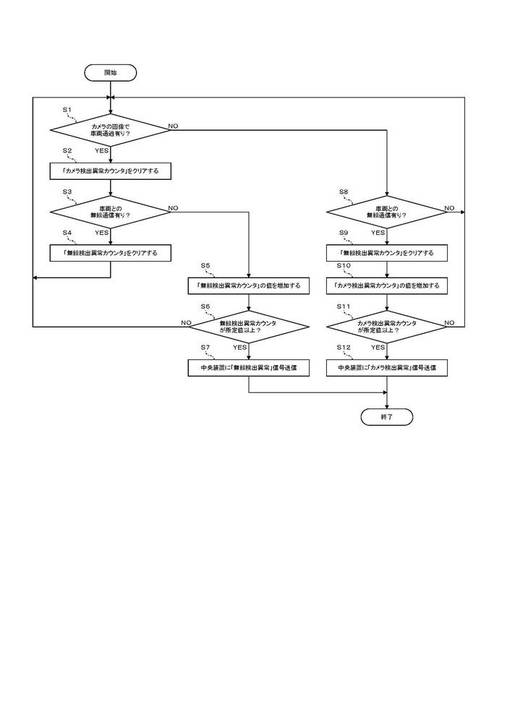
次に、図3を参照してカメラ2の検出異常と無線装置6の検出異常を相互に判定することについて説明する。
【0051】
まず、カメラ2で車両9が通過しているかを判断する(ステップS1)。この判断の結果、カメラ2で車両9の通過を検出していないときは、車両9との無線通信があるか否かを判断する(ステップS8)。この無線装置6による車両9との無線通信も無いときはステップS1とステップS8による車両9の通過の判断を繰り返す。
【0052】
ステップS1でカメラ2より車両9の通過が判断されたときは「カメラ検出異常カウンタ」をクリアする(ステップS2)。その後、無線装置6により車両9との無線通信があるかを判断する(ステップS3)。この判断の結果、車両9との無線通信があるときは「無線検出異常カウンタ」をクリアする(ステップS4)。その後、ステップS1に戻りカメラ2による車両9の通過を判断する。
【0053】
このように、カメラ2でも無線装置6でも車両9を検出しているときは「カメラ検出異常カウンタ」及び「無線検出異常カウンタ」がクリアされている状態である。
【0054】
例えば、ステップS1でカメラ2により車両通過を判断していないにも関わらず、ステップS8で車両9との無線通信があったときは「無線検出異常カウンタ」をクリアして(ステップS9)、「カメラ検出異常カウンタ」を1増加させる(ステップS10)。その後、「カメラ検出異常カウンタ」が所定値以上になっているかが判断される(ステップS11)。ステップS11で「カメラ検出異常カウンタ」が所定値以上になっていなければ、ステップS1に戻りカメラ2による車両通過の判断が行われる。
【0055】
ステップS11で「カメラ検出異常カウンタ」が所定値以上になっていると判断されたときは、カメラ2では車両9の通過が判断されていないにも関わらず、無線装置6によって所定台数の車両9との無線通信がなされたということでありカメラ2の検出異常であると判断して、中央装置7に「カメラ検出異常」信号を送信する(ステップS12)。
【0056】
一方、例えば、ステップS1ではカメラ2により車両通過を判断しているにも関わらず、ステップS3で車両9との無線通信が無かったときは「無線検出異常カウンタ」を1増加させる(ステップS5)。その後、「無線検出異常カウンタ」が所定値以上になっているかが判断される(ステップS6)。ステップS6で「無線検出異常カウンタ」が所定値以上になっていなければ、ステップS1に戻りカメラ2による車両通過の判断が行われる。
【0057】
ステップS6で「カメラ検出異常カウンタ」が所定値以上になっていると判断されたときは、カメラ2では所定台数の車両9の通過が判断されているが、無線装置6によっては車両9との無線通信がなされなかったということであり無線装置6の検出異常であると判定して、中央装置7に「無線検出異常」信号を送信する(ステップS7)。
【0058】
次に、カメラ2が検出異常で、無線装置6は正常である場合の道路状況制御部5での検出異常判定の実施例を示す。
【0059】
実施例は、図3に示すカメラ2及び無線装置6の検出異常を相互に判定する手段のフローチャートを参照して、図4に示すようにカメラ2が布10で覆われた場合のカメラ2の検出異常を判定する処理手順について説明する。なお、この実施例ではカメラ2が布10で覆われた場合の例を示すが、必ずしもこの場合に限定されるものではない。カメラ2のレンズへの付着物の付着やカメラ2の劣化、設置位置ずれ等のカメラ2の故障を診断する機能では検出異常を判定できない状態であるにもかかわらず、カメラ2で撮影した画像の画像処理による車両9の検出を低下させる状態などの場合も含むものである。
【0060】
まず、監視区域8を車両9が通過するが、カメラ2が布10で覆われているため、カメラ2で撮影した画像(データ)からは車両9を検出することが不可能になる。これにより、事象生成部4から道路状況制御部5に車両9の通過が無いことを示す車両9の検出結果が出力される。この検出結果により道路状況制御部5は、カメラ2で撮影した画像(データ)では、車両9の通過が無いと判断する(ステップS1:NO)。
【0061】
無線装置6による車両9との無線通信では車両9を検出することが可能である。これにより、無線装置6から道路状況制御部5に車両9の通過が有ったことを示す車両9の検出結果が出力される。この検出結果により道路状況制御部5は、無線装置6による無線通信では、車両9の通過が有ると判断する(ステップS8:YES)。
【0062】
このとき、道路状況制御部5の計算手段による「無線検出異常カウンタ」の値は、無線装置6から道路状況制御部5への車両9の通過が有ったことを示す検出結果の入力によりクリア(例えば無線検出異常カウンタの値を0にする)される(ステップS9)。
【0063】
以上の道路状況制御部5での処理(ステップS1:NO及びステップS8:YES)を比較する(車両通過比較手段)。これにより、事象生成部4では車両9を検出していないにも関わらず、無線装置6では車両9を検出している比較結果となるため道路状況制御部5の計算手段による「カメラ検出異常カウンタ」の値を増加(例えばカメラ検出異常カウンタの値を1増加)する(ステップS10)。
【0064】
この道路状況制御部5の「カメラ検出異常カウンタ」の値が所定値N(Nは設定による少なくとも1以上の整数)以上になった時(ステップS11:YES)は、カメラ2を検出異常と判定(カメラを検出異常と判定する手段)する。このとき、道路状況制御部5から中央装置7に「カメラ検出異常」を示す信号を送信する(ステップS12)。
【0065】
また、道路状況制御部5の「カメラ検出異常カウンタ」の値が所定値N(Nは設定による少なくとも1以上の整数)未満の時(ステップS11:NO)は、カメラ2で撮影した画像(データ)で車両9の通過の判断を行う処理(ステップS1)に戻る。
【0066】
道路状況制御部5の「カメラ検出異常カウンタ」の値は、事象生成部4から道路状況制御部5に車両9の通過が有ったことを示す検出結果(ステップS1:YES)が一度でも入力されるとクリア(例えばカメラ検出異常カウンタの値を0にする)される(ステップS2)。
【0067】
次に、カメラ2が正常で、無線装置6は検出異常である場合の道路状況制御部5での検出異常判定の実施例を示す。
【0068】
実施例は、図3に示すカメラ2及び無線装置6の検出異常を相互に判定する手段のフローチャートを参照して、無線装置6に検出異常が起こった場合の検出異常を判定する処理手順について説明する。なお、この実施例では無線装置6の検出異常として、無線装置6の故障を診断する機能では検出異常を判定できない状態であるにもかかわらず、無線の送信は可能であるが受信は不可能である状態などの無線装置6の故障以外の検出異常が発生して車両9からの受信ができない等の無線装置6から車両9の検出結果が、道路状況制御部5に出力されない原因をも含むものである。
【0069】
まず、監視区域8を車両9が通過すると、カメラ2で撮影した画像(データ)からは車両9を検出することが可能である。これにより、事象生成部4から道路状況制御部5に車両9の通過が有ったことを示す車両9の検出結果が出力される。この検出結果により道路状況制御部5は、カメラ2で撮影した画像(データ)では、車両9の通過が有ると判断する(ステップS1:YES)。
【0070】
このとき、道路状況制御部5の計算手段による「カメラ検出異常カウンタ」の値は、事象生成部4から道路状況制御部5への車両9の通過が有ったことを示す検出結果の入力によりクリア(例えばカメラ検出異常カウンタの値を0にする)される(ステップS2)。
【0071】
無線装置6に検出異常があるため、無線装置6による無線通信からは車両9を検出することが不可能になる。これにより、無線装置6から道路状況制御部5に車両9の通過が無いことを示す車両9の検出結果が出力される。この検出結果により道路状況制御部5は、無線装置6による無線通信では、車両9の通過が無いと判断する(ステップS3:NO)。
【0072】
以上の道路状況制御部5での処理(ステップS1:YES及びステップS3:NO)を比較する(車両通過比較手段)。これにより、事象生成部4では車両9を検出しているにも関わらず、無線装置6では車両9を検出していない比較結果となるため道路状況制御部5の計算手段による「無線検出異常カウンタ」の値を増加(例えば無線検出異常カウンタの値を1増加)する(ステップS5)。
【0073】
この道路状況制御部5の「無線検出異常カウンタ」の値が所定値N(Nは設定による少なくとも1以上の整数)以上になった時(ステップS6:YES)は、無線装置6を検出異常と判定(通信装置を検出異常と判定する手段)する。このとき、道路状況制御部5から中央装置7に「無線検出異常」を示す信号を送信する(ステップS7)。
【0074】
また、道路状況制御部5の「無線検出異常カウンタ」の値が所定値N(Nは設定による少なくとも1以上の整数)未満の時(ステップS6:NO)は、無線装置6による無線通信で車両9の通過の判断を行う処理(ステップS1)に戻る。
【0075】
道路状況制御部5の「無線検出異常カウンタ」の値は、無線装置6から道路状況制御部5に車両9の通過が有ったことを示す検出結果(ステップS3:YES又はステップS8:YES)が一度でも入力されるとクリア(例えば無線検出異常カウンタの値を0にする)される(ステップS4又はステップS9)。
【0076】
事象生成部4と無線装置6から道路状況制御部5に車両9の通過が無かったことを示す車両9の検出結果が出力された場合(ステップS1:NO及びステップS8:NO)、道路状況制御部5は、カメラ2で撮影した画像(データ)で車両9の通過の判断を行う処理(ステップS1)に戻る。
【0077】
事象生成部4と無線装置6から道路状況制御部5に車両9の通過が有ったことを示す車両9の検出結果が出力された場合(ステップS1:YES及びステップS3:YES)、道路状況制御部5の「カメラ検出異常カウンタ」及び「無線検出異常カウンタ」の値をクリア(例えばカメラ検出異常カウンタ及び無線検出異常カウンタの値を0にする)する。次に、道路状況制御部5は、カメラ2で撮影した画像(データ)で車両9の通過の判断を行う処理(ステップS1)に戻る。
【0078】
以上説明した本実施形態によれば、道路状況把握装置1は、カメラ2、画像処理部3、事象生成部4、道路状況制御部5及び無線装置6を用いた検出異常判定手段を有することにより、カメラ2及び無線装置6の検出異常を相互に判定することが可能となる。これにより、カメラ2及び無線装置6の装置自体の故障ではないために、上位の装置側による故障を診断する機能で判定できない検出異常であっても、道路状況把握装置1は検出異常を判定することが可能となる。
【0079】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0080】
1…道路状況把握装置
2…カメラ
3…画像処理部
4…事象生成部
5…道路状況制御部
6…無線装置
7…中央装置
8…監視区域
9…車両
10…布
【技術分野】
【0001】
本発明の実施形態は、道路状況把握装置及び道路状況把握方法に関する。
【背景技術】
【0002】
道路状況把握装置とは、高速道路の見通しの悪いカーブ等において、カメラを1台または複数台設置し、当該位置の道路状況をカメラで撮影して、車両通過情報や渋滞情報等を検出し、無線装置による車両との送受信によりカーブへの進入車両にそれらの情報を伝達するものである。
【0003】
この道路状況把握装置に用いられるカメラの故障やカメラからのデータ通信異常は、現状でもカメラを制御及び監視する上位の装置側で検出することが可能である。
【0004】
しかしながら、例えばカメラが布で覆われてしまった場合等、カメラ自体やデータ通信系に異常がない状態では、カーブ等の画像データを得られないにもかかわらず、画像データの検出異常と判定することができず、車両通過情報や渋滞情報等の検出処理を続けるという問題があった。
【0005】
また、無線装置でも無線装置の故障を診断する機能が正常であれば、無線の送信は継続する。しかしながら、無線装置に何らかの検出異常が発生して、車両からの通信情報を受信できなくなっても、車両が通過していないのか、または車両からの通信情報を受信できなくなっているのかを判定することは困難であった。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−44502号公報
【特許文献2】特開2010−61435号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明が解決しようとする課題は、道路状況把握装置を構成するカメラ及び無線装置の検出異常を相互に判定することができる道路状況把握装置及び道路状況把握方法を提供することである。
【課題を解決するための手段】
【0008】
上記課題を達成するために、実施形態の道路状況把握装置は、道路上の監視区域の近傍に設けられ、監視区域を撮影するカメラと、前記カメラで撮影された画像の画像処理により車両を検出する第1の車両検出手段と、道路上の監視区域の近傍に設けられ、監視区域内に進入した車両との無線通信を行う通信装置と、前記通信装置による車両との無線通信により前記監視区域内への車両の進入状況を検出する第2の車両検出手段と、前記第1の車両検出手段の車両の検出結果と前記第2の車両検出手段の車両の検出結果とに基づいて道路状況を把握する手段と、前記把握手段で把握した道路状況を前記通信装置によって車両に報知する報知手段と、前記第1の車両検出手段の車両の検出結果と前記第2の車両検出手段の車両の検出結果とに基づいて前記カメラの検出異常と前記通信装置の検出異常とを、相互に判定する検出異常判定手段と、を有することを特徴とする。
【0009】
また、実施形態の道路状況把握方法は、監視区域の近傍に設置されたカメラで道路上の監視区域を撮影し、前記カメラで撮影された画像の画像処理により車両を検出し、通信装置により道路上の監視区域内に進入した車両との無線通信を行い、前記通信装置による車両との無線通信により車両の進入状況を検出し、前記カメラによる車両の検出結果と前記通信装置による車両の検出結果とに基づいて道路状況を把握して、前記通信装置により道路状況を車両に報知し、前記カメラによる車両の検出結果と前記通信装置による車両の検出結果とに基づいて前記カメラの検出異常と前記通信装置の検出異常とを相互に判定することを特徴とする。
【図面の簡単な説明】
【0010】
【図1】実施形態の道路状況把握装置のシステム構成図。
【図2】実施形態のカメラで撮影した画像から道路上の監視区域の交通状況を判別する手段のフローチャート。
【図3】実施形態のカメラ及び無線装置の検出異常を相互に判定する手段のフローチャート。
【図4】実施形態のカメラの検出異常を示すシステム構成図。
【発明を実施するための形態】
【0011】
以下、実施形態の道路状況把握装置を図1から図4を参照して説明する。
【0012】
図1は、実施形態の道路状況把握装置のシステム構成図である。
【0013】
図1に示すように、道路状況把握装置1は、道路上の監視区域8の近傍(車両の通行を妨害しない道路上の位置)に設置され、監視区域内を撮影するカメラ2、カメラ2からの撮影画像が入力され、その撮影画像を記録したり、画像処理を行うことにより車両9を検出する画像処理部3(車両検出手段)を有している。また道路状況把握装置1は、カメラ2からの撮影画像及び画像処理部3が記録している撮影画像が入力され、それらの画像処理により交通状況の判別処理を行う車両検出手段としての事象生成部4を有している。
【0014】
さらに、道路状況把握装置1には、監視区域8の近傍(車両の通行を妨害しない道路上の位置)に設置され、監視区域内に車両9が進入したときに車両9との無線通信により監視区域内への車両9の進入状況を検出する車両検出手段としての無線装置6が設けられている。そして、事象生成部4による車両9の検出結果及び無線装置6による車両9の検出結果が道路状況制御部5に入力され、それらの車両9の検出結果に基づいて道路状況制御部5は車両通過情報や渋滞情報等の道路状況を把握する。道路状況制御部5は、この把握した道路状況を無線装置6によって車両9に報知するようになっている。
【0015】
さらに道路状況制御部5は、事象生成部4による車両9の検出結果と無線装置6による車両9の検出結果とを比較し、それら検出結果の差異を検出することにより、カメラ2及び無線装置6の検出異常を相互に判定する(検出異常判定手段)。
【0016】
道路状況把握装置1には、道路状況制御部5の検出結果が送信される中央装置7が接続され、道路全体の状況が管理されるようになっている。
【0017】
このような道路状況把握装置1は、例えば交差点のような交通量が多い場所や高速道路の見通しの悪いカーブ等に設置され、これらの場所の交通状況、例えば渋滞状態、停止車両の有無、落下物等による危険の有無等を監視するようになっている。
【0018】
[画像処理による車両検出]
次に、画像処理による車両検出(第1の車両検出手段)について図2を参照して説明する。
【0019】
カメラ2は、道路状況把握装置1によって交通状況を監視する監視区域8の近傍に設置され、道路上の監視区域8及び車両9等を撮影する。
【0020】
画像処理部3には、監視区域8の交通状況を判別するために用いられる背景画像が予め記録(格納)される。また、画像処理部3には、カメラ2の状態を判別するための基準となる基準画像が予め記録(格納)される。
【0021】
この背景画像及び基準画像は、例えば一定時間前にカメラ2によって撮影された複数の画像(映像)を用いて作成される。背景画像及び基準画像は、同一座標における複数の画像の輝度を、当該輝度の高低によりソートし、当該ソート順位が中間の輝度を出力するメディアン処理を画素毎に実行することにより作成される。また、背景画像及び基準画像は、例えば通行車両または落下物等を含まない画像である。
【0022】
また、画像処理部3には、カメラ2によって撮影される画像における座標(画像座標)を、当該カメラ2からの絶対距離(実際の距離)に変換するために用いられる変換テーブルが記録されている。
【0023】
事象生成部4は、カメラ2によって撮影された画像(映像)及び画像処理部3に記録されている背景画像に基づいて、監視区域8の交通状況、例えば渋滞、停止車両または落下物の有無等を判別する。
【0024】
事象生成部4は、画像処理部3に記録されている背景画像及びカメラ2によって撮影された画像(以下、監視画像という)を比較し、画像間の輝度差を算出した差分画像を生成する。差分画像は、比較された背景画像及び監視画像において異なる箇所を含む画像である。
【0025】
事象生成部4は、生成された差分画像の値(輝度差)が予め定められている閾値以上の領域を抽出する。この抽出された領域が例えば車両9(領域)として認知される。これにより、事象生成部4は、道路上の監視区域8の交通状況を判別する。
【0026】
事象生成部4は、この判別した車両9の検出結果を道路状況制御部5に出力する。
【0027】
また、事象生成部4は、監視画像と画像処理部3に記録されている基準画像との差を求める。すなわち、監視画像及び基準画像間の輝度差を算出することによって差分画像を取得する。
【0028】
事象生成部4は、取得された差分画像に基づいて、カメラ2の状態を判別する。事象生成部4は、カメラ2の状態として、例えばカメラ2の設置位置が変化しているか、画像の明るさが変化しているか、またはカメラ2のレンズに付着物が付着しているか等を判別する。
【0029】
道路状況制御部5は、事象生成部4によって判別されたカメラ2の状態に基づいて、当該カメラ2を管理する。
【0030】
次に、図1に示す道路状況把握装置1に備えられる事象生成部4による、カメラ2で撮影した画像から道路上の監視区域8の交通状況を判別する手段の処理手順について図2のフローチャートを参照して説明する。
【0031】
まず、事象生成部4は、監視画像を取得する(ステップS1)、とともに、事象生成部4は、画像処理部3に記録されている背景画像を取得する。
【0032】
次に、事象生成部4は、取得された監視画像及び背景画像を比較する処理(画像間比較処理)を実行する(ステップS2)。これにより、事象生成部4は、監視画像及び背景画像の画像間の輝度差を算出した差分画像を取得する(求める)。
【0033】
事象生成部4は、取得された差分画像の値(輝度差)が予め定められた閾値(任意の閾値)以上の領域を抽出する処理(2値化処理)を実行する(ステップS3)。
【0034】
次に、事象生成部4は、抽出された領域に対して膨張処理または縮小処理を施す。これにより、事象生成部4は、抽出された領域の形を整える処理(領域整形処理)を実行する(ステップS4)。
【0035】
事象生成部4では、上記したように抽出された領域が例えば車両領域として認知される。つまり、事象生成部4においては、抽出された領域に基づいて道路上の監視区域8の交通状況が判別される。
【0036】
事象生成部4は、画像処理部3に記録されている変換テーブルを用いて、車両領域の画像座標をカメラ2からの絶対距離に変換する。これにより、事象生成部4は、車両9の位置を計測する処理(車両位置計測処理)を実行する(ステップS5)。
【0037】
次に、事象生成部4は、計測された時系列の車両位置と、その時間間隔から車両速度を計測する処理(車両速度計測処理)を実行する(ステップS6)。
【0038】
事象生成部4は、計測された車両9(領域)の位置、車両速度及び抽出された領域が道路に対して占める割合に基づいて、例えば渋滞、停止車両または落下物の有無のような交通状況を判別する処理(交通状況判別処理)を実行する(ステップS7)。これにより、道路上の監視区域8の道路状況を検出する。
【0039】
[無線通信による車両検出]
次に、無線通信による車両検出(第2の車両検出手段)について説明する。
【0040】
無線装置6(通信装置)は、アンテナ、送信装置、受信装置及び付属装置などから構成され、道路状況把握装置1によって交通状況が監視される監視区域8の近傍に設置されている。この無線装置6は監視区域内へ進入した車両9と無線通信を行い、車両9からの識別情報などを受信することにより監視区域内への車両9の進入状況を検出する。
【0041】
無線装置6は、検出した進入状況を道路状況制御部5に出力する。
【0042】
無線装置6と車両9との無線通信の方式の一例としては、無線装置6(基地局)と車両9(移動局)との間を、フレーム毎に時分割多元接続方式(TDMA:Time Division Multiple Access)で行われる。
【0043】
TDMA方式で伝送されるフレームは、FCMS(フレームコントロールメッセージスロット)、MDS(メッセージデータスロット)、ACTS(アクチベーションスロット)、WCNS(ワイヤレスコールナンバースロット)等から構成される。
【0044】
FCMSは、無線装置6がフレーム制御情報と後続するスロット(例えば、ACTS、MDS、WCNS)の割付情報とから構成されるFCMC(フレームコントロールメッセージチャネル) を送信するための通信制御用スロットである。
【0045】
ACTSは、車両9から送信される接続要求を受信するための要求受信スロットである。MDSは、接続要求の送信元の車両9との間でデータを送受信するスロットである。WCNSは、車両9の車載器を識別するためのWCN(ワイヤレスコールナンバー: ETCの車載器等に付された車両番号)を取得するためのスロットである。
【0046】
WCNは、車載器を固有に識別するための固有識別番号(車載器ID)として用いられるため、無線装置6は、WCNを識別情報などの無線通信情報として受信することで車両9を固有に識別し、車両9を検出する。この無線通信により、例えば監視区域8の車両通過の情報や、車両9の車載器に蓄積された位置・時刻等のデータを得る。これらの無線通信による情報やカメラ2の撮像画像による交通状況の判別により道路状況制御部5は、渋滞情報等の道路状況を把握する(道路状況を把握する手段)。
【0047】
道路状況把握装置1は、道路状況制御部5で把握した道路状況を無線装置6から車両9に報知する(通信装置によって車両に報知する報知手段)。
【0048】
[検出異常判定]
次に、検出異常判定手段を説明する。
【0049】
道路状況制御部5は、画像処理による事象生成部4からの車両9の検出結果と無線通信による無線装置6からの車両9の検出結果とを比較して、車両9の検出結果の差異を検出する。これにより、カメラ2及び無線装置6の検出異常を相互に判定する。
【0050】
次に、図3を参照してカメラ2の検出異常と無線装置6の検出異常を相互に判定することについて説明する。
【0051】
まず、カメラ2で車両9が通過しているかを判断する(ステップS1)。この判断の結果、カメラ2で車両9の通過を検出していないときは、車両9との無線通信があるか否かを判断する(ステップS8)。この無線装置6による車両9との無線通信も無いときはステップS1とステップS8による車両9の通過の判断を繰り返す。
【0052】
ステップS1でカメラ2より車両9の通過が判断されたときは「カメラ検出異常カウンタ」をクリアする(ステップS2)。その後、無線装置6により車両9との無線通信があるかを判断する(ステップS3)。この判断の結果、車両9との無線通信があるときは「無線検出異常カウンタ」をクリアする(ステップS4)。その後、ステップS1に戻りカメラ2による車両9の通過を判断する。
【0053】
このように、カメラ2でも無線装置6でも車両9を検出しているときは「カメラ検出異常カウンタ」及び「無線検出異常カウンタ」がクリアされている状態である。
【0054】
例えば、ステップS1でカメラ2により車両通過を判断していないにも関わらず、ステップS8で車両9との無線通信があったときは「無線検出異常カウンタ」をクリアして(ステップS9)、「カメラ検出異常カウンタ」を1増加させる(ステップS10)。その後、「カメラ検出異常カウンタ」が所定値以上になっているかが判断される(ステップS11)。ステップS11で「カメラ検出異常カウンタ」が所定値以上になっていなければ、ステップS1に戻りカメラ2による車両通過の判断が行われる。
【0055】
ステップS11で「カメラ検出異常カウンタ」が所定値以上になっていると判断されたときは、カメラ2では車両9の通過が判断されていないにも関わらず、無線装置6によって所定台数の車両9との無線通信がなされたということでありカメラ2の検出異常であると判断して、中央装置7に「カメラ検出異常」信号を送信する(ステップS12)。
【0056】
一方、例えば、ステップS1ではカメラ2により車両通過を判断しているにも関わらず、ステップS3で車両9との無線通信が無かったときは「無線検出異常カウンタ」を1増加させる(ステップS5)。その後、「無線検出異常カウンタ」が所定値以上になっているかが判断される(ステップS6)。ステップS6で「無線検出異常カウンタ」が所定値以上になっていなければ、ステップS1に戻りカメラ2による車両通過の判断が行われる。
【0057】
ステップS6で「カメラ検出異常カウンタ」が所定値以上になっていると判断されたときは、カメラ2では所定台数の車両9の通過が判断されているが、無線装置6によっては車両9との無線通信がなされなかったということであり無線装置6の検出異常であると判定して、中央装置7に「無線検出異常」信号を送信する(ステップS7)。
【0058】
次に、カメラ2が検出異常で、無線装置6は正常である場合の道路状況制御部5での検出異常判定の実施例を示す。
【0059】
実施例は、図3に示すカメラ2及び無線装置6の検出異常を相互に判定する手段のフローチャートを参照して、図4に示すようにカメラ2が布10で覆われた場合のカメラ2の検出異常を判定する処理手順について説明する。なお、この実施例ではカメラ2が布10で覆われた場合の例を示すが、必ずしもこの場合に限定されるものではない。カメラ2のレンズへの付着物の付着やカメラ2の劣化、設置位置ずれ等のカメラ2の故障を診断する機能では検出異常を判定できない状態であるにもかかわらず、カメラ2で撮影した画像の画像処理による車両9の検出を低下させる状態などの場合も含むものである。
【0060】
まず、監視区域8を車両9が通過するが、カメラ2が布10で覆われているため、カメラ2で撮影した画像(データ)からは車両9を検出することが不可能になる。これにより、事象生成部4から道路状況制御部5に車両9の通過が無いことを示す車両9の検出結果が出力される。この検出結果により道路状況制御部5は、カメラ2で撮影した画像(データ)では、車両9の通過が無いと判断する(ステップS1:NO)。
【0061】
無線装置6による車両9との無線通信では車両9を検出することが可能である。これにより、無線装置6から道路状況制御部5に車両9の通過が有ったことを示す車両9の検出結果が出力される。この検出結果により道路状況制御部5は、無線装置6による無線通信では、車両9の通過が有ると判断する(ステップS8:YES)。
【0062】
このとき、道路状況制御部5の計算手段による「無線検出異常カウンタ」の値は、無線装置6から道路状況制御部5への車両9の通過が有ったことを示す検出結果の入力によりクリア(例えば無線検出異常カウンタの値を0にする)される(ステップS9)。
【0063】
以上の道路状況制御部5での処理(ステップS1:NO及びステップS8:YES)を比較する(車両通過比較手段)。これにより、事象生成部4では車両9を検出していないにも関わらず、無線装置6では車両9を検出している比較結果となるため道路状況制御部5の計算手段による「カメラ検出異常カウンタ」の値を増加(例えばカメラ検出異常カウンタの値を1増加)する(ステップS10)。
【0064】
この道路状況制御部5の「カメラ検出異常カウンタ」の値が所定値N(Nは設定による少なくとも1以上の整数)以上になった時(ステップS11:YES)は、カメラ2を検出異常と判定(カメラを検出異常と判定する手段)する。このとき、道路状況制御部5から中央装置7に「カメラ検出異常」を示す信号を送信する(ステップS12)。
【0065】
また、道路状況制御部5の「カメラ検出異常カウンタ」の値が所定値N(Nは設定による少なくとも1以上の整数)未満の時(ステップS11:NO)は、カメラ2で撮影した画像(データ)で車両9の通過の判断を行う処理(ステップS1)に戻る。
【0066】
道路状況制御部5の「カメラ検出異常カウンタ」の値は、事象生成部4から道路状況制御部5に車両9の通過が有ったことを示す検出結果(ステップS1:YES)が一度でも入力されるとクリア(例えばカメラ検出異常カウンタの値を0にする)される(ステップS2)。
【0067】
次に、カメラ2が正常で、無線装置6は検出異常である場合の道路状況制御部5での検出異常判定の実施例を示す。
【0068】
実施例は、図3に示すカメラ2及び無線装置6の検出異常を相互に判定する手段のフローチャートを参照して、無線装置6に検出異常が起こった場合の検出異常を判定する処理手順について説明する。なお、この実施例では無線装置6の検出異常として、無線装置6の故障を診断する機能では検出異常を判定できない状態であるにもかかわらず、無線の送信は可能であるが受信は不可能である状態などの無線装置6の故障以外の検出異常が発生して車両9からの受信ができない等の無線装置6から車両9の検出結果が、道路状況制御部5に出力されない原因をも含むものである。
【0069】
まず、監視区域8を車両9が通過すると、カメラ2で撮影した画像(データ)からは車両9を検出することが可能である。これにより、事象生成部4から道路状況制御部5に車両9の通過が有ったことを示す車両9の検出結果が出力される。この検出結果により道路状況制御部5は、カメラ2で撮影した画像(データ)では、車両9の通過が有ると判断する(ステップS1:YES)。
【0070】
このとき、道路状況制御部5の計算手段による「カメラ検出異常カウンタ」の値は、事象生成部4から道路状況制御部5への車両9の通過が有ったことを示す検出結果の入力によりクリア(例えばカメラ検出異常カウンタの値を0にする)される(ステップS2)。
【0071】
無線装置6に検出異常があるため、無線装置6による無線通信からは車両9を検出することが不可能になる。これにより、無線装置6から道路状況制御部5に車両9の通過が無いことを示す車両9の検出結果が出力される。この検出結果により道路状況制御部5は、無線装置6による無線通信では、車両9の通過が無いと判断する(ステップS3:NO)。
【0072】
以上の道路状況制御部5での処理(ステップS1:YES及びステップS3:NO)を比較する(車両通過比較手段)。これにより、事象生成部4では車両9を検出しているにも関わらず、無線装置6では車両9を検出していない比較結果となるため道路状況制御部5の計算手段による「無線検出異常カウンタ」の値を増加(例えば無線検出異常カウンタの値を1増加)する(ステップS5)。
【0073】
この道路状況制御部5の「無線検出異常カウンタ」の値が所定値N(Nは設定による少なくとも1以上の整数)以上になった時(ステップS6:YES)は、無線装置6を検出異常と判定(通信装置を検出異常と判定する手段)する。このとき、道路状況制御部5から中央装置7に「無線検出異常」を示す信号を送信する(ステップS7)。
【0074】
また、道路状況制御部5の「無線検出異常カウンタ」の値が所定値N(Nは設定による少なくとも1以上の整数)未満の時(ステップS6:NO)は、無線装置6による無線通信で車両9の通過の判断を行う処理(ステップS1)に戻る。
【0075】
道路状況制御部5の「無線検出異常カウンタ」の値は、無線装置6から道路状況制御部5に車両9の通過が有ったことを示す検出結果(ステップS3:YES又はステップS8:YES)が一度でも入力されるとクリア(例えば無線検出異常カウンタの値を0にする)される(ステップS4又はステップS9)。
【0076】
事象生成部4と無線装置6から道路状況制御部5に車両9の通過が無かったことを示す車両9の検出結果が出力された場合(ステップS1:NO及びステップS8:NO)、道路状況制御部5は、カメラ2で撮影した画像(データ)で車両9の通過の判断を行う処理(ステップS1)に戻る。
【0077】
事象生成部4と無線装置6から道路状況制御部5に車両9の通過が有ったことを示す車両9の検出結果が出力された場合(ステップS1:YES及びステップS3:YES)、道路状況制御部5の「カメラ検出異常カウンタ」及び「無線検出異常カウンタ」の値をクリア(例えばカメラ検出異常カウンタ及び無線検出異常カウンタの値を0にする)する。次に、道路状況制御部5は、カメラ2で撮影した画像(データ)で車両9の通過の判断を行う処理(ステップS1)に戻る。
【0078】
以上説明した本実施形態によれば、道路状況把握装置1は、カメラ2、画像処理部3、事象生成部4、道路状況制御部5及び無線装置6を用いた検出異常判定手段を有することにより、カメラ2及び無線装置6の検出異常を相互に判定することが可能となる。これにより、カメラ2及び無線装置6の装置自体の故障ではないために、上位の装置側による故障を診断する機能で判定できない検出異常であっても、道路状況把握装置1は検出異常を判定することが可能となる。
【0079】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0080】
1…道路状況把握装置
2…カメラ
3…画像処理部
4…事象生成部
5…道路状況制御部
6…無線装置
7…中央装置
8…監視区域
9…車両
10…布
【特許請求の範囲】
【請求項1】
道路上の監視区域の近傍に設けられ、監視区域を撮影するカメラと、
前記カメラで撮影された画像の画像処理により車両を検出する第1の車両検出手段と、
道路上の監視区域の近傍に設けられ、監視区域内に進入した車両との無線通信を行う通信装置と、
前記通信装置による車両との無線通信により前記監視区域内への車両の進入状況を検出する第2の車両検出手段と、
前記第1の車両検出手段の車両の検出結果と前記第2の車両検出手段の車両の検出結果とに基づいて道路状況を把握する手段と、
前記把握手段で把握した道路状況を前記通信装置によって車両に報知する報知手段と、
前記第1の車両検出手段の車両の検出結果と前記第2の車両検出手段の車両の検出結果とに基づいて前記カメラの検出異常と前記通信装置の検出異常とを相互に判定する検出異常判定手段と、
を有することを特徴とする道路状況把握装置。
【請求項2】
前記検出異常判定手段は、
前記第1の車両検出手段による車両の通過と前記第2の車両検出手段による車両の通過とを比較して、前記第1の車両検出手段と前記第2の車両検出手段との車両の通過の差異を検出する車両通過比較手段と、
前記車両通過比較手段で前記第1の車両検出手段又は前記第2の車両検出手段の一方の検出結果が他方の検出結果よりも所定の台数以上となったとき、他方の車両検出手段の検出異常と判定する手段と、
を有することを特徴とする請求項1に記載の道路状況把握装置。
【請求項3】
監視区域の近傍に設置されたカメラで道路上の監視区域を撮影し、
前記カメラで撮影された画像の画像処理により車両を検出し、
通信装置により道路上の監視区域内に進入した車両との無線通信を行い、
前記通信装置による車両との無線通信により車両の進入状況を検出し、
前記カメラによる車両の検出結果と前記通信装置による車両の検出結果とに基づいて道路状況を把握して、前記通信装置により道路状況を車両に報知し、
前記カメラによる車両の検出結果と前記通信装置による車両の検出結果とに基づいて前記カメラの検出異常と前記通信装置の検出異常とを相互に判定することを特徴とする道路状況把握方法。
【請求項4】
前記相互に判定するステップは、
前記カメラによる車両の検出結果と通信装置による車両の検出結果とを比較し、
一方の検出結果が他方の検出結果よりも所定の台数以上の差となったとき、カメラ又は通信装置の他方が検出異常と判定することを特徴とする請求項3に記載の道路状況把握方法。
【請求項1】
道路上の監視区域の近傍に設けられ、監視区域を撮影するカメラと、
前記カメラで撮影された画像の画像処理により車両を検出する第1の車両検出手段と、
道路上の監視区域の近傍に設けられ、監視区域内に進入した車両との無線通信を行う通信装置と、
前記通信装置による車両との無線通信により前記監視区域内への車両の進入状況を検出する第2の車両検出手段と、
前記第1の車両検出手段の車両の検出結果と前記第2の車両検出手段の車両の検出結果とに基づいて道路状況を把握する手段と、
前記把握手段で把握した道路状況を前記通信装置によって車両に報知する報知手段と、
前記第1の車両検出手段の車両の検出結果と前記第2の車両検出手段の車両の検出結果とに基づいて前記カメラの検出異常と前記通信装置の検出異常とを相互に判定する検出異常判定手段と、
を有することを特徴とする道路状況把握装置。
【請求項2】
前記検出異常判定手段は、
前記第1の車両検出手段による車両の通過と前記第2の車両検出手段による車両の通過とを比較して、前記第1の車両検出手段と前記第2の車両検出手段との車両の通過の差異を検出する車両通過比較手段と、
前記車両通過比較手段で前記第1の車両検出手段又は前記第2の車両検出手段の一方の検出結果が他方の検出結果よりも所定の台数以上となったとき、他方の車両検出手段の検出異常と判定する手段と、
を有することを特徴とする請求項1に記載の道路状況把握装置。
【請求項3】
監視区域の近傍に設置されたカメラで道路上の監視区域を撮影し、
前記カメラで撮影された画像の画像処理により車両を検出し、
通信装置により道路上の監視区域内に進入した車両との無線通信を行い、
前記通信装置による車両との無線通信により車両の進入状況を検出し、
前記カメラによる車両の検出結果と前記通信装置による車両の検出結果とに基づいて道路状況を把握して、前記通信装置により道路状況を車両に報知し、
前記カメラによる車両の検出結果と前記通信装置による車両の検出結果とに基づいて前記カメラの検出異常と前記通信装置の検出異常とを相互に判定することを特徴とする道路状況把握方法。
【請求項4】
前記相互に判定するステップは、
前記カメラによる車両の検出結果と通信装置による車両の検出結果とを比較し、
一方の検出結果が他方の検出結果よりも所定の台数以上の差となったとき、カメラ又は通信装置の他方が検出異常と判定することを特徴とする請求項3に記載の道路状況把握方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−68851(P2012−68851A)
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願番号】特願2010−212562(P2010−212562)
【出願日】平成22年9月22日(2010.9.22)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願日】平成22年9月22日(2010.9.22)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]