
道路状況把握装置
【課題】非監視対象車線を走行する車両の誤判定を防止し、監視対象車線に対する道路状況を正確に判定することが可能となる道路状況把握装置を提供することである。
【解決手段】実施形態に係る道路状況把握装置は、車両が走行する複数の車線からなる道路上の画像を撮像手段により撮像し、この撮像された画像に基づき前記道路の状況を判定する道路状況把握装置において、前記撮像された画像から移動ベクトル画像を作成し、この作成された移動ベクトル画像の方向性とあらかじめ与えられる車両の進行方向情報とから非監視対象車線を走行する車両を検出し、この検出された非監視対象車線を走行する車両の画像を前記撮像された画像から除外することを特徴としている。
【解決手段】実施形態に係る道路状況把握装置は、車両が走行する複数の車線からなる道路上の画像を撮像手段により撮像し、この撮像された画像に基づき前記道路の状況を判定する道路状況把握装置において、前記撮像された画像から移動ベクトル画像を作成し、この作成された移動ベクトル画像の方向性とあらかじめ与えられる車両の進行方向情報とから非監視対象車線を走行する車両を検出し、この検出された非監視対象車線を走行する車両の画像を前記撮像された画像から除外することを特徴としている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、道路の状況を判定する道路状況把握装置に関する。
【背景技術】
【0002】
高速道路等の有料道路上などにおいて、路側に設置されたカメラで道路上の画像を撮像し、撮像された画像から画像処理等によって道路上を走行する車両を検出し、検出した車両の位置、速度等の情報から現在の道路状況(道路渋滞、停止車両、低速車両等)を判定する道路状況把握装置が知られている。
【0003】
このような道路状況把握装置では、カメラの設置位置による非監視対象車線の画像内への写り込みを想定していないため、非監視対象車線を走行する車両の一部が監視対象車線上に投影された場合に、道路状況を誤判定する可能性がある。
【0004】
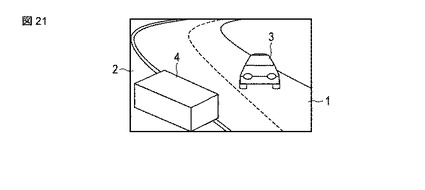
すなわち、カメラの設置位置によっては、たとえば、図21に示すように、車両3が走行する監視対象車線1の画像内に非監視対象車線2が写りこみ、場合によっては非監視対象車線2を走行する車両4の一部が監視対象車線1に投影されることにより、道路状況を誤判定する可能性がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平6−274786号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、非監視対象車線を走行する車両の誤判定を防止し、監視対象車線に対する道路状況を正確に判定することが可能となる道路状況把握装置を提供することである。
【課題を解決するための手段】
【0007】
実施形態に係る道路状況把握装置は、車両が走行する複数の車線からなる道路上の画像を撮像手段により撮像し、この撮像された画像に基づき前記道路の状況を判定する道路状況把握装置において、前記撮像された画像から移動ベクトル画像を作成し、この作成された移動ベクトル画像の方向性とあらかじめ与えられる車両の進行方向情報とから非監視対象車線を走行する車両を検出し、この検出された非監視対象車線を走行する車両の画像を前記撮像された画像から除外することを特徴としている。
【図面の簡単な説明】
【0008】
【図1】実施形態に係る道路状況把握装置の構成を概略的に示す模式図。
【図2】実施形態に係る道路状況把握装置の動作を説明するフローチャート。
【図3】実施形態に係る道路状況把握装置の動作を説明するフローチャート。
【図4】あらかじめ登録される監視対象車線画像の一例を示す模式図。
【図5】あらかじめ登録される背景画像の一例を示す模式図。
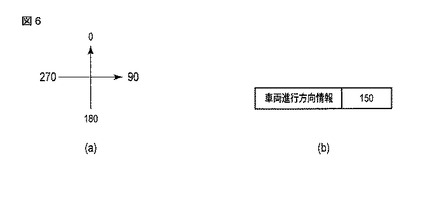
【図6】あらかじめ登録される車両の進行方向情報の一例を示す図。
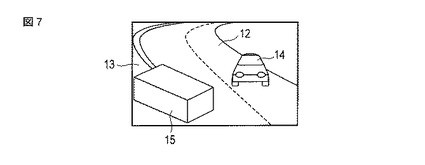
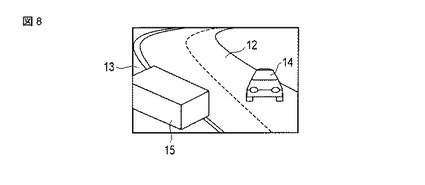
【図7】入力された撮像画像の一例を示す模式図。
【図8】入力された撮像画像の一例を示す模式図。
【図9】作成された移動ベクトル画像の一例を示す模式図。
【図10】作成された車両領域画像の一例を示す模式図。
【図11】作成された車両領域移動ベクトル画像の一例を示す模式図。
【図12】抽出された車両領域ベクトルの一例を示す模式図。
【図13】ベクトル履歴保持部の具体的な内容例を示す模式図。
【図14】誤検出された非監視対象車線を走行する車両の画像を除外した車両領域画像の一例を示す模式図。
【図15】作成された背景差分画像の一例を示す模式図。
【図16】作成された停止車両領域画像の一例を示す模式図。
【図17】抽出された停止車両領域重心の一例を示す模式図。
【図18】誤検出された非監視対象車線に停止する車両の画像を除外した車両領域画像の一例を示す模式図。
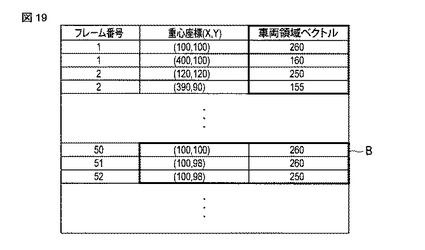
【図19】ベクトル履歴保持部の具体的な内容例を示す模式図。
【図20】登録された進行方向情報および停止車両領域重心座標の一例を示す模式図。
【図21】非監視対象車線の車両が監視対象車線の画像内に写りこむ一例を説明する模式図。
【発明を実施するための形態】
【0009】
以下、実施形態に係る道路状況把握装置について図面を参照して説明する。
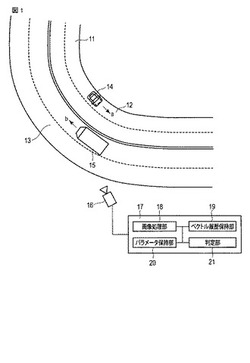
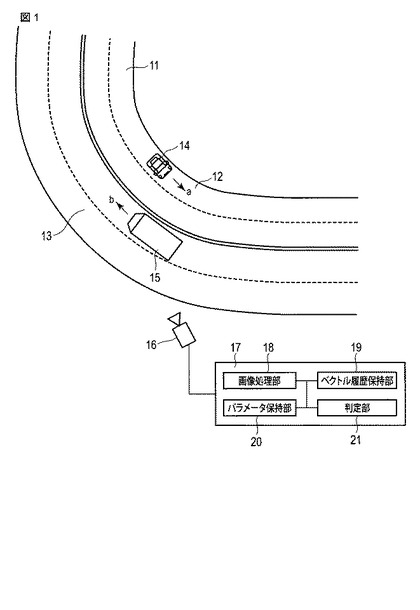
図1は、本実施形態に係る道路状況把握装置の構成を概略的に示すものである。図1において、道路11は例えば高速道路等の有料道路で、監視対象車線12と非監視対象車線13とが並設されていて、監視対象車線12を車両(たとえば、乗用車)14が図示矢印a方向に走行し、非監視対象車線13を車両(たとえば、トラック)15が図示矢印b方向(監視対象車線12とは逆方向)に走行するものとする。なお、監視対象車線12および非監視対象車線13は、図示のようにカーブしているものとする。
【0010】
道路11のカーブ部分近傍の側部には、撮像手段としてのビデオカメラ(以降、単にカメラと略称する)16が設置されている。カメラ16は、監視対象車線12のカーブ部分を通過する車両14を含む所定エリア内の画像を常時一定間隔(たとえば、33msごと)で撮像してフレーム画像として出力するもので、出力されたフレーム画像は順次、処理装置17に送られる。
【0011】
処理装置17は、カメラ16により撮像された画像に対し所定の画像処理を行なうことにより車両を検出し、車両検出結果から監視対象車線12における交通事象および異常車両などの状況を判定するもので、画像処理を実行する画像処理部18、画像処理により得られる移動ベクトル情報を保持するベクトル履歴保持部19、画像処理に使用する各種パラメータを保持するパラメータ保持部20、画像処理結果から最終的な道路状況の判定を行なう判定部21によって構成される。
【0012】
ここで、判定部21により判定する道路状況とは、たとえば、「道路渋滞」、「停止車両」、「低速車両」、「通常状態」の4状態とする。「道路渋滞」とは監視対象車線12が車両14で渋滞している状態、「停止車両」とは監視対象車線12上に停止している車両14が存在する状態、「低速車両」とは監視対象車線12上にあらかじめ定められた所定値以下の速度で走行する車両14が存在する状態を示すものとする。なお、道路状況が上記4状態ではない場合は「通常状態」とする。
【0013】
次に、このような構成において、図2および図3に示すフローチャートを参照して本実施形態に係る道路状況把握装置の動作を説明する。
【0014】
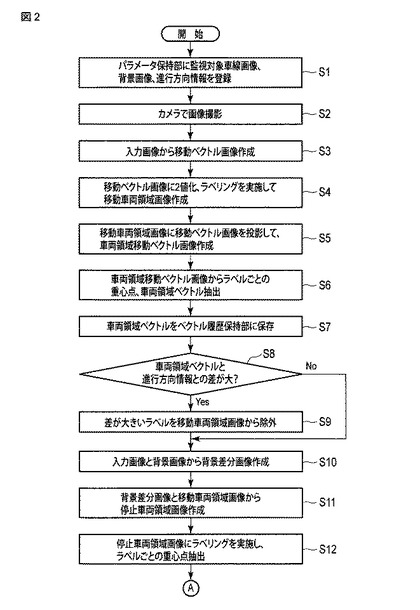
まず、あらかじめパラメータ保持部20に、たとえば、図4に示すような監視対象車線画像(監視対象車線12を示す画像)、図5に示すような背景画像(車両14が存在しない監視対象車線12上の画像)、および、図6に示すような車両の進行方向情報(監視対象車線12を走行する車両14の進行方向情報)を保持(登録)しておく(ステップS1)。
【0015】
なお、進行方向情報は、たとえば、図6(a)に示すように真上を0°とした進行方向を情報として保持するもので、その具体例を図6(b)に示す。図6(b)の例は進行方向情報が「150」の場合である。
【0016】
カメラ16は、監視対象車線12上に設定された所定エリア内の画像を常時一定間隔で撮像し、撮像したフレーム画像を処理装置17の画像処理部18へ順次送る(ステップS2)。
【0017】
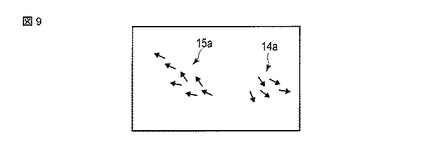
画像処理部18は、カメラ16で時系列に撮影された複数枚のフレーム画像から画像処理により移動ベクトル画像を作成する(ステップS3)。すなわち、たとえば、図7、図8に示すような時刻tのフレーム画像と時刻t+Δtのフレーム画像とから、フレーム間における移動ベクトルを求めて移動ベクトル画像(図9参照)として作成する。図9において、14a部が車両14に対応し、15a部が車両15に対応している。
【0018】
移動ベクトル画像の作成する範囲は、ステップS1で登録された監視対象車線画像で定義された領域とする。なお、移動ベクトル画像の作成方法には種々の方法があるが、ここでは濃淡パターンマッチング法を用いるものとする。
【0019】
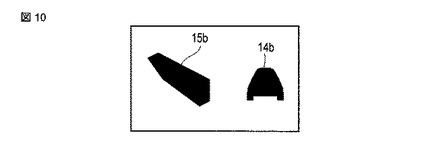
次に、画像処理部18は、ステップS3で作成した図9の移動ベクトル画像に対して、移動ベクトルの有無による2値化処理を行なうことにより、移動ベクトルを持つ画素を抽出し、さらにラベリング処理を実施して移動車両領域画像(図10参照)を作成する(ステップS4)。図10において、14b部が車両14に対応し、15b部が車両15に対応している。
【0020】
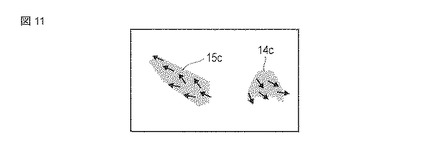
次に、画像処理部18は、ステップS4で作成された図10の移動車両領域画像に対しステップS3で作成した図9の移動ベクトル画像を投影することにより、図11に示すような車両領域ラベルごとの移動ベクトル画像(車両領域移動ベクトル画像)を作成する(ステップS5)。図11において、14c部が車両14に対応し、15c部が車両15に対応している。
【0021】
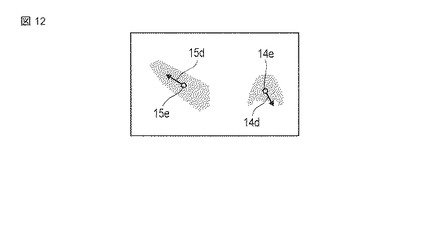
次に、画像処理部18は、ステップS5で作成された図11の車両領域移動ベクトル画像に対して、車両領域ラベルごとに各画素の平均値算出および重心点算出を実施し、最終的に車両領域ベクトル(図12参照)として抽出する(ステップS6)。図12において、14d部が車両14に対応し、15d部が車両15に対応し、14e,15eがそれぞれの重心点を示している。
【0022】
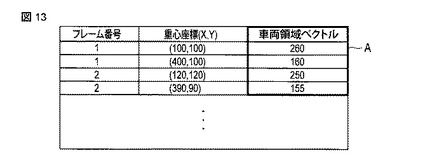
次に、画像処理部18は、ステップS6で抽出した図12の車両領域ベクトルおよび重心点の座標値(X,Y)をベクトル履歴保持部19に時系列に保持(登録)する(ステップS7)。図13に、ベクトル履歴保持部19の具体的な内容例を示す。
【0023】
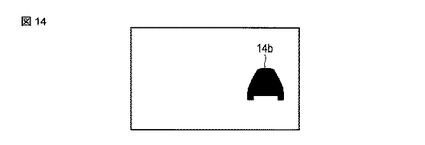
次に、画像処理部18は、ステップS7で登録した車両領域ベクトルと、ステップS1で登録された進行方向情報とを比較し(ステップS8)、車両領域ベクトルが進行方向情報と大きく異なる場合、非監視対象車線13の車両15を誤検出したと判断し、図10に示した移動車両領域画像から車両15に対応する画像15bの除去を行ない(ステップS9)、図14に示すような車両14に対応する画像14bだけの移動車両領域画像を作成する。
【0024】
具体例に基づき説明すると、ベクトル履歴保持部19に登録された車両領域ベクトルが図13の枠A内の値であった場合、これらの車両領域ベクトルと進行方向情報とを比較し、差が大きい(たとえば、90以上等)場合は、非監視対象車線13を走行する車両15を誤検出したと判断し、移動車両領域画像から車両15に対応する画像15bを除外する。
【0025】
なお、ステップS8において、車両領域ベクトルと進行方向情報との差が小さい場合は、誤検出なしと判断し、ステップS9を飛び越してステップS10に進む。
【0026】
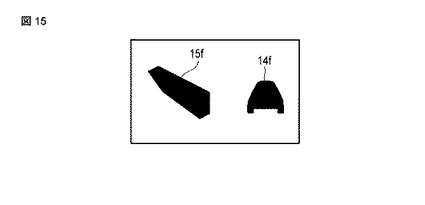
次に、画像処理部18は、ステップS2で得られた撮影画像とステップS1で登録された背景画像とから背景差分画像を作成する(ステップS10)。すなわち、図8に示した時刻t+Δtの画像と図5に示した背景画像とから、図15に示すような背景差分画像を作成する。図15において、14f部が車両14に対応し、15f部が車両15に対応している。
【0027】
次に、画像処理部18は、ステップS10で作成された図15の背景差分画像と図14に示した移動車両領域画像との差分を求めることにより、図16に示すような停止車両領域画像を作成する(ステップS11)。
【0028】
次に、画像処理部18は、ステップS11で作成された図16の停止車両領域画像に対しラベリング処理を実施し、さらにラベルごとに重心点算出を実施し、停止車両領域の重心点15g(図17参照)を抽出する(ステップS12)。
【0029】
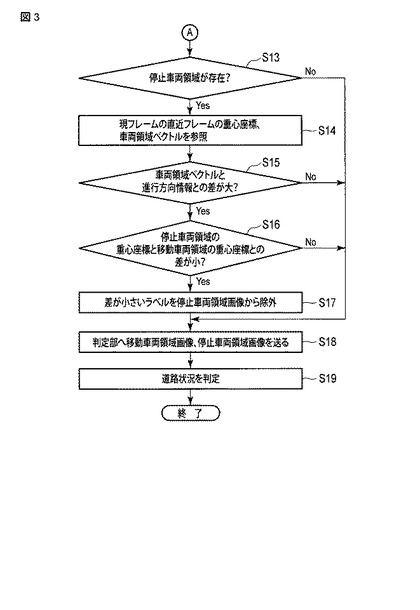
次に、画像処理部18は、ステップS12で重心点を抽出した場合(すなわち、停止車両領域が存在する場合、ステップS13)、当該フレーム直近(たとえば、当該フレームから3フレーム前まで)のベクトル履歴をベクトル履歴保持部19から参照する(ステップS14)。ここで、当該フレーム直近の車両領域ベクトルとステップS1で登録された進行方向情報との差分が大きい場合で(ステップS15)、かつ、ステップS12で抽出された停止車両領域の重心点と、当該フレーム直近の移動車両領域の重心点との差分が少ない場合(ステップS16)、非監視対象車線13の車両15が停止しているのを誤検出しているものと判断し、図16に示した停止車両領域画像から車両15に対応する画像15fの除去を行ない、図18に示すような停止車両領域画像を作成する(ステップS17)。
【0030】
具体例に基づき説明すると、ベクトル履歴保持部19に登録された移動車両領域の重心点座標(X,Y)および車両領域ベクトルが図19の枠B内の値であり、ステップS12で抽出された停止車両領域の重心座標(X,Y)およびあらかじめ登録された進行方向情報が図20に示す値であった場合、図19の車両領域ベクトルと図20の進行方向情報とを比較し、差が大きい(たとえば、90以上等)場合で、かつ、図20の停止車両領域の重心座標と図19の移動車両領域の重心座標とを比較し、差が小さい場合(たとえば、50未満等)は、非監視対象車線13に停止している車両15を誤検出したと判断し、停止車両領域画像から車両15に対応する画像15fを除外する。
【0031】
なお、ステップS13において、重心点を抽出しなかった場合(すなわち、停止車両領域が存在しない場合)、あるいは、ステップS15において、車両領域ベクトルと進行方向情報との差分が小さい場合、あるいは、ステップS16において、停止車両領域の重心点と移動車両領域の重心点との差分が大きい場合は、誤検出なしと判断し、ステップS18に進む。
【0032】
次に、画像処理部18は、上記のようにして求めた図14の移動車両領域画像および図18の停止車両領域画像を判定部21へ送り(ステップS18)、判定部21で最終的な道路状況の判定を実施する(ステップS19)。
【0033】
以下、判定部21により行なわれる道路状況の判定処理の一例について簡単に説明する。移動車両領域画像から監視対象車線12で走行する車両14が検出されているか認識でき、停止車両領域画像から監視対象車線12で停止している車両14が検出されているか認識できるので、たとえば、検出した車両領域の座標値をあらかじめメモリに保持された変換テーブルを用いて絶対距離に変換することにより、検出された車両14(領域)の位置、車両面積、走行速度を求める。
【0034】
次に、このようにして検出された車両情報に基づき監視対象車線12の状況として少なくとも道路渋滞、停止車両、低速車両、通常状態の4状態を判定する。具体的に説明すると、たとえば、上記のようにして取得された車両14の位置、車両面積、走行速度に基づき監視対象車線12が渋滞しているか否かの判定を行なうとともに、取得された走行速度に基づき停止車両、低速車両の判定を行なう。
【0035】
なお、このような道路状況判定処理の詳細については、たとえば、特願2008−207034号に記載されているので、それを参照されたい。
【0036】
以上説明した動作は1つのフレーム画像に対する動作であり、したがって各フレーム画像ごとに上記動作が繰り返される。
【0037】
以上述べた少なくとも1つの実施形態の道路状況把握装置によれば、非監視対象車線13の車両15を誤検出しても、それを除外することができる。これにより、非監視対象車線13を走行する車両15の誤判定を防止し、監視対象車線12に対する道路状況を正確に判定することが可能となる。
【0038】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行なうことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0039】
11…道路、12…監視対象車線、13…非監視対象車線、14,15…車両、16…ビデオカメラ(撮像手段)、17…処理装置、18…画像処理部、19…ベクトル履歴保持部、20…パラメータ保持部、21…判定部。
【技術分野】
【0001】
本発明の実施形態は、道路の状況を判定する道路状況把握装置に関する。
【背景技術】
【0002】
高速道路等の有料道路上などにおいて、路側に設置されたカメラで道路上の画像を撮像し、撮像された画像から画像処理等によって道路上を走行する車両を検出し、検出した車両の位置、速度等の情報から現在の道路状況(道路渋滞、停止車両、低速車両等)を判定する道路状況把握装置が知られている。
【0003】
このような道路状況把握装置では、カメラの設置位置による非監視対象車線の画像内への写り込みを想定していないため、非監視対象車線を走行する車両の一部が監視対象車線上に投影された場合に、道路状況を誤判定する可能性がある。
【0004】
すなわち、カメラの設置位置によっては、たとえば、図21に示すように、車両3が走行する監視対象車線1の画像内に非監視対象車線2が写りこみ、場合によっては非監視対象車線2を走行する車両4の一部が監視対象車線1に投影されることにより、道路状況を誤判定する可能性がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平6−274786号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、非監視対象車線を走行する車両の誤判定を防止し、監視対象車線に対する道路状況を正確に判定することが可能となる道路状況把握装置を提供することである。
【課題を解決するための手段】
【0007】
実施形態に係る道路状況把握装置は、車両が走行する複数の車線からなる道路上の画像を撮像手段により撮像し、この撮像された画像に基づき前記道路の状況を判定する道路状況把握装置において、前記撮像された画像から移動ベクトル画像を作成し、この作成された移動ベクトル画像の方向性とあらかじめ与えられる車両の進行方向情報とから非監視対象車線を走行する車両を検出し、この検出された非監視対象車線を走行する車両の画像を前記撮像された画像から除外することを特徴としている。
【図面の簡単な説明】
【0008】
【図1】実施形態に係る道路状況把握装置の構成を概略的に示す模式図。
【図2】実施形態に係る道路状況把握装置の動作を説明するフローチャート。
【図3】実施形態に係る道路状況把握装置の動作を説明するフローチャート。
【図4】あらかじめ登録される監視対象車線画像の一例を示す模式図。
【図5】あらかじめ登録される背景画像の一例を示す模式図。
【図6】あらかじめ登録される車両の進行方向情報の一例を示す図。
【図7】入力された撮像画像の一例を示す模式図。
【図8】入力された撮像画像の一例を示す模式図。
【図9】作成された移動ベクトル画像の一例を示す模式図。
【図10】作成された車両領域画像の一例を示す模式図。
【図11】作成された車両領域移動ベクトル画像の一例を示す模式図。
【図12】抽出された車両領域ベクトルの一例を示す模式図。
【図13】ベクトル履歴保持部の具体的な内容例を示す模式図。
【図14】誤検出された非監視対象車線を走行する車両の画像を除外した車両領域画像の一例を示す模式図。
【図15】作成された背景差分画像の一例を示す模式図。
【図16】作成された停止車両領域画像の一例を示す模式図。
【図17】抽出された停止車両領域重心の一例を示す模式図。
【図18】誤検出された非監視対象車線に停止する車両の画像を除外した車両領域画像の一例を示す模式図。
【図19】ベクトル履歴保持部の具体的な内容例を示す模式図。
【図20】登録された進行方向情報および停止車両領域重心座標の一例を示す模式図。
【図21】非監視対象車線の車両が監視対象車線の画像内に写りこむ一例を説明する模式図。
【発明を実施するための形態】
【0009】
以下、実施形態に係る道路状況把握装置について図面を参照して説明する。
図1は、本実施形態に係る道路状況把握装置の構成を概略的に示すものである。図1において、道路11は例えば高速道路等の有料道路で、監視対象車線12と非監視対象車線13とが並設されていて、監視対象車線12を車両(たとえば、乗用車)14が図示矢印a方向に走行し、非監視対象車線13を車両(たとえば、トラック)15が図示矢印b方向(監視対象車線12とは逆方向)に走行するものとする。なお、監視対象車線12および非監視対象車線13は、図示のようにカーブしているものとする。
【0010】
道路11のカーブ部分近傍の側部には、撮像手段としてのビデオカメラ(以降、単にカメラと略称する)16が設置されている。カメラ16は、監視対象車線12のカーブ部分を通過する車両14を含む所定エリア内の画像を常時一定間隔(たとえば、33msごと)で撮像してフレーム画像として出力するもので、出力されたフレーム画像は順次、処理装置17に送られる。
【0011】
処理装置17は、カメラ16により撮像された画像に対し所定の画像処理を行なうことにより車両を検出し、車両検出結果から監視対象車線12における交通事象および異常車両などの状況を判定するもので、画像処理を実行する画像処理部18、画像処理により得られる移動ベクトル情報を保持するベクトル履歴保持部19、画像処理に使用する各種パラメータを保持するパラメータ保持部20、画像処理結果から最終的な道路状況の判定を行なう判定部21によって構成される。
【0012】
ここで、判定部21により判定する道路状況とは、たとえば、「道路渋滞」、「停止車両」、「低速車両」、「通常状態」の4状態とする。「道路渋滞」とは監視対象車線12が車両14で渋滞している状態、「停止車両」とは監視対象車線12上に停止している車両14が存在する状態、「低速車両」とは監視対象車線12上にあらかじめ定められた所定値以下の速度で走行する車両14が存在する状態を示すものとする。なお、道路状況が上記4状態ではない場合は「通常状態」とする。
【0013】
次に、このような構成において、図2および図3に示すフローチャートを参照して本実施形態に係る道路状況把握装置の動作を説明する。
【0014】
まず、あらかじめパラメータ保持部20に、たとえば、図4に示すような監視対象車線画像(監視対象車線12を示す画像)、図5に示すような背景画像(車両14が存在しない監視対象車線12上の画像)、および、図6に示すような車両の進行方向情報(監視対象車線12を走行する車両14の進行方向情報)を保持(登録)しておく(ステップS1)。
【0015】
なお、進行方向情報は、たとえば、図6(a)に示すように真上を0°とした進行方向を情報として保持するもので、その具体例を図6(b)に示す。図6(b)の例は進行方向情報が「150」の場合である。
【0016】
カメラ16は、監視対象車線12上に設定された所定エリア内の画像を常時一定間隔で撮像し、撮像したフレーム画像を処理装置17の画像処理部18へ順次送る(ステップS2)。
【0017】
画像処理部18は、カメラ16で時系列に撮影された複数枚のフレーム画像から画像処理により移動ベクトル画像を作成する(ステップS3)。すなわち、たとえば、図7、図8に示すような時刻tのフレーム画像と時刻t+Δtのフレーム画像とから、フレーム間における移動ベクトルを求めて移動ベクトル画像(図9参照)として作成する。図9において、14a部が車両14に対応し、15a部が車両15に対応している。
【0018】
移動ベクトル画像の作成する範囲は、ステップS1で登録された監視対象車線画像で定義された領域とする。なお、移動ベクトル画像の作成方法には種々の方法があるが、ここでは濃淡パターンマッチング法を用いるものとする。
【0019】
次に、画像処理部18は、ステップS3で作成した図9の移動ベクトル画像に対して、移動ベクトルの有無による2値化処理を行なうことにより、移動ベクトルを持つ画素を抽出し、さらにラベリング処理を実施して移動車両領域画像(図10参照)を作成する(ステップS4)。図10において、14b部が車両14に対応し、15b部が車両15に対応している。
【0020】
次に、画像処理部18は、ステップS4で作成された図10の移動車両領域画像に対しステップS3で作成した図9の移動ベクトル画像を投影することにより、図11に示すような車両領域ラベルごとの移動ベクトル画像(車両領域移動ベクトル画像)を作成する(ステップS5)。図11において、14c部が車両14に対応し、15c部が車両15に対応している。
【0021】
次に、画像処理部18は、ステップS5で作成された図11の車両領域移動ベクトル画像に対して、車両領域ラベルごとに各画素の平均値算出および重心点算出を実施し、最終的に車両領域ベクトル(図12参照)として抽出する(ステップS6)。図12において、14d部が車両14に対応し、15d部が車両15に対応し、14e,15eがそれぞれの重心点を示している。
【0022】
次に、画像処理部18は、ステップS6で抽出した図12の車両領域ベクトルおよび重心点の座標値(X,Y)をベクトル履歴保持部19に時系列に保持(登録)する(ステップS7)。図13に、ベクトル履歴保持部19の具体的な内容例を示す。
【0023】
次に、画像処理部18は、ステップS7で登録した車両領域ベクトルと、ステップS1で登録された進行方向情報とを比較し(ステップS8)、車両領域ベクトルが進行方向情報と大きく異なる場合、非監視対象車線13の車両15を誤検出したと判断し、図10に示した移動車両領域画像から車両15に対応する画像15bの除去を行ない(ステップS9)、図14に示すような車両14に対応する画像14bだけの移動車両領域画像を作成する。
【0024】
具体例に基づき説明すると、ベクトル履歴保持部19に登録された車両領域ベクトルが図13の枠A内の値であった場合、これらの車両領域ベクトルと進行方向情報とを比較し、差が大きい(たとえば、90以上等)場合は、非監視対象車線13を走行する車両15を誤検出したと判断し、移動車両領域画像から車両15に対応する画像15bを除外する。
【0025】
なお、ステップS8において、車両領域ベクトルと進行方向情報との差が小さい場合は、誤検出なしと判断し、ステップS9を飛び越してステップS10に進む。
【0026】
次に、画像処理部18は、ステップS2で得られた撮影画像とステップS1で登録された背景画像とから背景差分画像を作成する(ステップS10)。すなわち、図8に示した時刻t+Δtの画像と図5に示した背景画像とから、図15に示すような背景差分画像を作成する。図15において、14f部が車両14に対応し、15f部が車両15に対応している。
【0027】
次に、画像処理部18は、ステップS10で作成された図15の背景差分画像と図14に示した移動車両領域画像との差分を求めることにより、図16に示すような停止車両領域画像を作成する(ステップS11)。
【0028】
次に、画像処理部18は、ステップS11で作成された図16の停止車両領域画像に対しラベリング処理を実施し、さらにラベルごとに重心点算出を実施し、停止車両領域の重心点15g(図17参照)を抽出する(ステップS12)。
【0029】
次に、画像処理部18は、ステップS12で重心点を抽出した場合(すなわち、停止車両領域が存在する場合、ステップS13)、当該フレーム直近(たとえば、当該フレームから3フレーム前まで)のベクトル履歴をベクトル履歴保持部19から参照する(ステップS14)。ここで、当該フレーム直近の車両領域ベクトルとステップS1で登録された進行方向情報との差分が大きい場合で(ステップS15)、かつ、ステップS12で抽出された停止車両領域の重心点と、当該フレーム直近の移動車両領域の重心点との差分が少ない場合(ステップS16)、非監視対象車線13の車両15が停止しているのを誤検出しているものと判断し、図16に示した停止車両領域画像から車両15に対応する画像15fの除去を行ない、図18に示すような停止車両領域画像を作成する(ステップS17)。
【0030】
具体例に基づき説明すると、ベクトル履歴保持部19に登録された移動車両領域の重心点座標(X,Y)および車両領域ベクトルが図19の枠B内の値であり、ステップS12で抽出された停止車両領域の重心座標(X,Y)およびあらかじめ登録された進行方向情報が図20に示す値であった場合、図19の車両領域ベクトルと図20の進行方向情報とを比較し、差が大きい(たとえば、90以上等)場合で、かつ、図20の停止車両領域の重心座標と図19の移動車両領域の重心座標とを比較し、差が小さい場合(たとえば、50未満等)は、非監視対象車線13に停止している車両15を誤検出したと判断し、停止車両領域画像から車両15に対応する画像15fを除外する。
【0031】
なお、ステップS13において、重心点を抽出しなかった場合(すなわち、停止車両領域が存在しない場合)、あるいは、ステップS15において、車両領域ベクトルと進行方向情報との差分が小さい場合、あるいは、ステップS16において、停止車両領域の重心点と移動車両領域の重心点との差分が大きい場合は、誤検出なしと判断し、ステップS18に進む。
【0032】
次に、画像処理部18は、上記のようにして求めた図14の移動車両領域画像および図18の停止車両領域画像を判定部21へ送り(ステップS18)、判定部21で最終的な道路状況の判定を実施する(ステップS19)。
【0033】
以下、判定部21により行なわれる道路状況の判定処理の一例について簡単に説明する。移動車両領域画像から監視対象車線12で走行する車両14が検出されているか認識でき、停止車両領域画像から監視対象車線12で停止している車両14が検出されているか認識できるので、たとえば、検出した車両領域の座標値をあらかじめメモリに保持された変換テーブルを用いて絶対距離に変換することにより、検出された車両14(領域)の位置、車両面積、走行速度を求める。
【0034】
次に、このようにして検出された車両情報に基づき監視対象車線12の状況として少なくとも道路渋滞、停止車両、低速車両、通常状態の4状態を判定する。具体的に説明すると、たとえば、上記のようにして取得された車両14の位置、車両面積、走行速度に基づき監視対象車線12が渋滞しているか否かの判定を行なうとともに、取得された走行速度に基づき停止車両、低速車両の判定を行なう。
【0035】
なお、このような道路状況判定処理の詳細については、たとえば、特願2008−207034号に記載されているので、それを参照されたい。
【0036】
以上説明した動作は1つのフレーム画像に対する動作であり、したがって各フレーム画像ごとに上記動作が繰り返される。
【0037】
以上述べた少なくとも1つの実施形態の道路状況把握装置によれば、非監視対象車線13の車両15を誤検出しても、それを除外することができる。これにより、非監視対象車線13を走行する車両15の誤判定を防止し、監視対象車線12に対する道路状況を正確に判定することが可能となる。
【0038】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行なうことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0039】
11…道路、12…監視対象車線、13…非監視対象車線、14,15…車両、16…ビデオカメラ(撮像手段)、17…処理装置、18…画像処理部、19…ベクトル履歴保持部、20…パラメータ保持部、21…判定部。
【特許請求の範囲】
【請求項1】
車両が走行する複数の車線からなる道路上の画像を撮像手段により撮像し、この撮像された画像に基づき前記道路の状況を判定する道路状況把握装置において、前記撮像された画像から移動ベクトル画像を作成し、この作成された移動ベクトル画像の方向性とあらかじめ与えられる車両の進行方向情報とから非監視対象車線を走行する車両を検出し、この検出された非監視対象車線を走行する車両の画像を前記撮像された画像から除外することを特徴とする道路状況把握装置。
【請求項2】
監視対象車線と非監視対象車線とが並設された道路において、前記監視対象車線上の画像を撮像手段により撮像し、この撮像された画像に対し所定の画像処理を施すことにより前記監視対象車線の状況を判定する道路状況把握装置であって、
前記撮像された画像から移動ベクトル画像を作成する移動ベクトル画像作成手段と、
この移動ベクトル画像作成手段により作成された移動ベクトル画像の方向性とあらかじめ与えられる車両の進行方向情報とから前記非監視対象車線を走行する車両を検出する車両検出手段と、
この車両検出手段により検出された非監視対象車線を走行する車両の画像を前記撮像された画像から除外する画像除外手段と、
を具備したことを特徴とする道路状況把握装置。
【請求項3】
車両が走行する複数の車線からなる道路上の画像を撮像手段により撮像し、この撮像された画像に基づき前記道路の状況を判定する道路状況把握装置において、前記撮像された画像から移動ベクトル画像を作成するとともに、前記撮像された画像から車両が停止している停止車両領域画像を作成し、この作成された停止車両領域画像の重心座標および当該停止車両領域画像直近の前記作成された移動ベクトル画像の方向性および重心座標およびあらかじめ与えられる車両の進行方向情報から非監視対象車線にて停止する車両を検出し、この検出された非監視対象車線にて停止する車両の画像を前記撮像された画像から除外することを特徴とする道路状況把握装置。
【請求項4】
監視対象車線と非監視対象車線とが並設された道路において、前記監視対象車線上の画像を撮像手段により撮像し、この撮像された画像に対し所定の画像処理を施すことにより前記監視対象車線の状況を判定する道路状況把握装置であって、
前記撮像された画像から移動ベクトル画像を作成する移動ベクトル画像作成手段と、
前記撮像された画像から車両が停止している停止車両領域画像を作成する停止車両領域画像作成手段と、
この停止車両領域画像作成手段により抽出された停止車両領域画像の重心座標および当該停止車両領域画像直近の前記作成された移動ベクトル画像の方向性および重心座標およびあらかじめ与えられる車両の進行方向情報から前記非監視対象車線にて停止する車両を検出する車両検出手段と、
この車両検出手段により検出された非監視対象車線にて停止する車両の画像を前記撮像された画像から除外する画像除外手段と、
を具備したことを特徴とする道路状況把握装置。
【請求項1】
車両が走行する複数の車線からなる道路上の画像を撮像手段により撮像し、この撮像された画像に基づき前記道路の状況を判定する道路状況把握装置において、前記撮像された画像から移動ベクトル画像を作成し、この作成された移動ベクトル画像の方向性とあらかじめ与えられる車両の進行方向情報とから非監視対象車線を走行する車両を検出し、この検出された非監視対象車線を走行する車両の画像を前記撮像された画像から除外することを特徴とする道路状況把握装置。
【請求項2】
監視対象車線と非監視対象車線とが並設された道路において、前記監視対象車線上の画像を撮像手段により撮像し、この撮像された画像に対し所定の画像処理を施すことにより前記監視対象車線の状況を判定する道路状況把握装置であって、
前記撮像された画像から移動ベクトル画像を作成する移動ベクトル画像作成手段と、
この移動ベクトル画像作成手段により作成された移動ベクトル画像の方向性とあらかじめ与えられる車両の進行方向情報とから前記非監視対象車線を走行する車両を検出する車両検出手段と、
この車両検出手段により検出された非監視対象車線を走行する車両の画像を前記撮像された画像から除外する画像除外手段と、
を具備したことを特徴とする道路状況把握装置。
【請求項3】
車両が走行する複数の車線からなる道路上の画像を撮像手段により撮像し、この撮像された画像に基づき前記道路の状況を判定する道路状況把握装置において、前記撮像された画像から移動ベクトル画像を作成するとともに、前記撮像された画像から車両が停止している停止車両領域画像を作成し、この作成された停止車両領域画像の重心座標および当該停止車両領域画像直近の前記作成された移動ベクトル画像の方向性および重心座標およびあらかじめ与えられる車両の進行方向情報から非監視対象車線にて停止する車両を検出し、この検出された非監視対象車線にて停止する車両の画像を前記撮像された画像から除外することを特徴とする道路状況把握装置。
【請求項4】
監視対象車線と非監視対象車線とが並設された道路において、前記監視対象車線上の画像を撮像手段により撮像し、この撮像された画像に対し所定の画像処理を施すことにより前記監視対象車線の状況を判定する道路状況把握装置であって、
前記撮像された画像から移動ベクトル画像を作成する移動ベクトル画像作成手段と、
前記撮像された画像から車両が停止している停止車両領域画像を作成する停止車両領域画像作成手段と、
この停止車両領域画像作成手段により抽出された停止車両領域画像の重心座標および当該停止車両領域画像直近の前記作成された移動ベクトル画像の方向性および重心座標およびあらかじめ与えられる車両の進行方向情報から前記非監視対象車線にて停止する車両を検出する車両検出手段と、
この車両検出手段により検出された非監視対象車線にて停止する車両の画像を前記撮像された画像から除外する画像除外手段と、
を具備したことを特徴とする道路状況把握装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】

【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2013−47878(P2013−47878A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2011−185810(P2011−185810)
【出願日】平成23年8月29日(2011.8.29)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願日】平成23年8月29日(2011.8.29)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]