
道路画像解析装置及び道路画像解析方法
【課題】道路標示とガードレールとを明確かつ高速に区別することができ、正確な位置情報を取得できる道路画像解析装置及び道路画像解析方法を提供する。
【解決手段】撮像部26が取得した主画像データに対して前処理部28がサブエリアを設定し、エッジ抽出部30がサブエリア毎にエッジ成分を抽出する。直線抽出部32は、上記抽出されたエッジ成分を解析して直線成分を抽出し、この直線成分を使用して直線成分解析部34が直線成分の中から連続成分を抽出する。マッチング処理部36は、上記連続成分の頂点と補助画像データとのマッチング処理を行い、各連続成分の3次元位置情報を取得する。識別部40は、3次元位置情報に含まれる各連続成分の高さ情報に基づき、連続成分が道路標示かガードレールかを識別する。
【解決手段】撮像部26が取得した主画像データに対して前処理部28がサブエリアを設定し、エッジ抽出部30がサブエリア毎にエッジ成分を抽出する。直線抽出部32は、上記抽出されたエッジ成分を解析して直線成分を抽出し、この直線成分を使用して直線成分解析部34が直線成分の中から連続成分を抽出する。マッチング処理部36は、上記連続成分の頂点と補助画像データとのマッチング処理を行い、各連続成分の3次元位置情報を取得する。識別部40は、3次元位置情報に含まれる各連続成分の高さ情報に基づき、連続成分が道路標示かガードレールかを識別する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路画像を解析して車道中央線や車道境界線、車道外側線等の道路標示、ガードレール等を抽出する道路画像解析装置及び道路画像解析方法に関する。
【背景技術】
【0002】
従来より、高精度の道路地図を作成するため、道路標示やガードレール等に関する正確な位置情報を取得する必要があった。この目的のため、例えば車載された単眼視カメラにより取得された2次元画像を用い、その輝度情報に基づいて解析を行う方法が知られている。このような技術の例が、下記特許文献1に開示されている。
【0003】
また、下記特許文献2には、ステレオカメラにより取得したステレオ画像から3次元位置データを算出してカードレール等の側壁を検出する技術が開示されている。
【特許文献1】特開平1−242916号公報
【特許文献2】特開平6−266828号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、上記従来の技術においては、単眼視カメラが取得する2次元画像を使用する場合、道路標示とガードレールとは共に直線状の画像となるので、その区別が困難であるという問題があった。
【0005】
また、ステレオカメラが取得するステレオ画像を使用する場合、画像全体に対してマッチング処理を行う必要があるため処理が重く、また画像を小領域に分割しマッチング処理を高速化した場合であっても、小領域内に距離の異なる複数の物体が混在することになるため十分な距離測定精度が得られないという問題があった。更に、得られた3次元位置情報だけでは道路標示とガードレールとの区別が困難であるという問題があった。
【0006】
本発明は、上記従来の課題に鑑みなされたものであり、その目的は、道路標示とガードレールとを明確かつ高速に区別することができ、正確な位置情報を取得できる道路画像解析装置及び道路画像解析方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明は、道路画像解析装置であって、同一位置を異なる方向から撮影する2台の撮像手段と、前記撮像手段の一方が取得した画像データから連続成分を抽出する連続成分抽出手段と、前記連続成分と前記撮像手段の他方が取得した画像データとを組合せ、前記連続成分の3次元位置情報を算出する3次元位置算出手段と、前記3次元位置算出手段が算出した3次元位置情報に基づいて前記連続成分を識別する識別手段と、を備えることを特徴とする。
【0008】
上記構成によれば、連続成分抽出手段が抽出した連続成分に画像解析処理の対象を絞った上で3次元位置算出手段及び識別手段により連続成分の内容を識別するので、簡易な構成で正確な道路画像解析を行うことができる。
【0009】
ここで、上記連続成分抽出手段は、前記撮像手段の一方が取得した画像データから直線成分を抽出し、この直線成分の位置、傾き及び直線間の関連性に基づいて前記連続成分を抽出することを特徴とする。
【0010】
また、上記3次元位置算出手段は、前記連続成分の端点と前記撮像手段の他方が取得した画像データとをマッチング処理することにより3次元位置情報を算出することを特徴とする。
【0011】
また、上記識別手段は、前記3次元位置情報に含まれる前記連続成分の高さ情報に基づいて前記連続成分を識別することを特徴とする。
【0012】
また、上記連続成分抽出手段、3次元位置算出手段及び識別手段は、道路の走行方向に対して直交する方向に設定されたサブエリアを処理単位とすることを特徴とする。
【0013】
また、本発明は、道路画像解析方法であって、同一位置を異なる2方向から撮影するステップと、前記撮影した一方の画像データから連続成分を抽出するステップと、前記連続成分と前記撮影した他方の画像データとを組合せ、前記連続成分の3次元位置情報を算出するステップと、前記算出した3次元位置情報に基づいて前記連続成分を識別するステップと、を備えることを特徴とする。
【0014】
ここで、上記連続成分を抽出するステップは、前記撮影した一方の画像データから直線成分を抽出し、この直線成分の位置、傾き及び直線間の関連性に基づいて前記連続成分を抽出することを特徴とする。
【0015】
また、上記連続成分の3次元位置情報を算出するステップは、前記連続成分の端点と前記撮影した他方の画像データとをマッチング処理することにより3次元位置情報を算出することを特徴とする。
【0016】
また、上記連続成分を識別するステップは、前記3次元位置情報に含まれる前記連続成分の高さ情報に基づいて前記連続成分を識別することを特徴とする。
【0017】
また、上記連続成分を抽出するステップ、連続成分の3次元位置情報を算出するステップ及び連続成分を識別するステップは、道路の走行方向に対して直交する方向に設定されたサブエリアを処理単位として実行されることを特徴とする。
【発明を実施するための最良の形態】
【0018】
以下、本発明を実施するための最良の形態(以下、実施形態という)を、図面に従って説明する。
【0019】
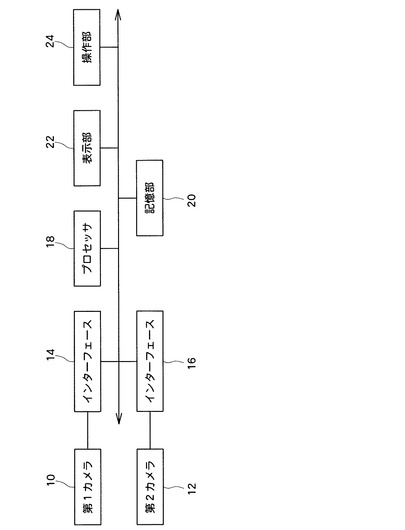
図1には、本発明にかかる道路画像解析装置の構成例のブロック図が示される。この道路画像解析装置は、例えばパーソナルコンピュータ等で実現することができる。図1において、道路画像解析装置は、第1カメラ10、第2カメラ12、インターフェース14、16、プロセッサ18、記憶部20、表示部22及び操作部24を含んで構成されている。
【0020】
第1カメラ10は、ステレオ画像を取得するために2台1組で設けられるステレオカメラの一方、例えば左カメラである。また、第2カメラ12は、上記ステレオカメラの他方、例えば右カメラである。これらの第1カメラ10及び第2カメラ12は、同一位置を異なる方向からカラー画像またはモノクロ画像を撮影し、本発明の撮像手段を構成する。
【0021】
インターフェース14、16は、それぞれ上記第1カメラ10、第2カメラ12が取得した画像データを受け取り、プロセッサ18等に転送する。
【0022】
プロセッサ18は、CPU(中央処理装置)等により構成され、インターフェース14、16、記憶部20、表示部22及び操作部24とデータのやり取りを行いながらこれらの動作を制御する。
【0023】
記憶部20は、プロセッサ18の作業用のRAM(ランダムアクセスメモリ)、プロセッサ18が実行するプログラム等が格納されたROM(リードオンリーメモリ)、不揮発性メモリとしてのフラッシュメモリ、磁気記憶媒体等で構成されたコンピュータ読み取り可能な記憶媒体である。また、本装置による解析結果である道路標示やガードレールの位置情報を記憶してもよい。
【0024】
表示部22は、例えば液晶ディスプレイ(LCD)等で構成され、道路画像解析装置の解析結果、ユーザが道路画像解析装置への動作指示等を入力するためのユーザインターフェース等を表示する。
【0025】
操作部24は、マウス等のポインティングデバイス、キーボード等の入力装置を含み、ユーザによるデータの入力等に使用する。
【0026】
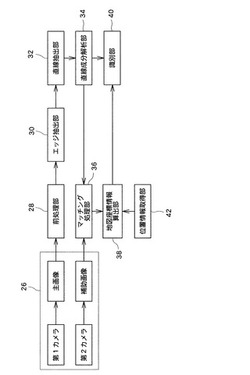
図2には、上記道路画像解析装置の各機能を表す機能ブロック図が示される。図2において、道路画像解析装置は、撮像部26、前処理部28、エッジ抽出部30、直線抽出部32、直線成分解析部34、マッチング処理部36、地図座標情報算出部38、識別部40及び位置情報取得部42を含んで構成されている。
【0027】
撮像部26は、第1カメラ10、第2カメラ12、インターフェース14、16により実現され、第1カメラ10で取得した画像データを主画像データとして、第2カメラ12で取得した画像データを補助画像データとしてそれぞれ出力する。
【0028】
前処理部28は、プロセッサ18により実現され、上記主画像データに対して画像強調処理等によりエッジ抽出処理を容易にするとともに、画像解析の基本単位である複数のサブエリアに画像を分割する処理を実行する。なお、サブエリアは道路の走行方向に直交するよう設定する。
【0029】
エッジ抽出部30は、プロセッサ18により実現され、上記各サブエリアにおいて、輝度や色が明−暗パターン及び暗−明パターンのエッジ成分の抽出を行う。ここで、エッジ成分とは、上記主画像データに含まれる、道路標示、ガードレール、電柱等の柱状構造物等の輪郭である。また、上記エッジ抽出には、例えば1次水平微分フィルタを使用することができる。
【0030】
直線抽出部32は、プロセッサ18により実現され、上記エッジ抽出部30が抽出したエッジ成分から直線成分を抽出する。この直線成分の抽出は、例えばハフ変換等を使用して行う。
【0031】
直線成分解析部34は、プロセッサ18により実現され、上記直線抽出部32が抽出した直線成分の位置や傾き、直線成分間の関連性等に基づき主画像データ中の連続成分を抽出する。ここで、連続成分とは、画像中で一定方向に繰り返し存在し、または一定方向に連続している直線成分である。例えば、道路上に所定長さで繰り返し描かれる車道境界線や道路端部に所定長さ毎に設けられる電柱等が前者の例であり、道路上に連続線として描かれる車道外側線やガードレール等が後者の例である。このような直線成分の連続性は、各サブエリア内及び各サブエリア相互における上記直線成分の位置関係により直線成分解析部34が判定する。また、電柱等の柱状構造物の直線成分は、その傾きにより除去し、直線解析の対象から除外することができる。さらに、上記直線成分間の関連性は、例えば直線成分相互の間の距離であり、道路上に描かれる道路標示を抽出するために使用される。すなわち、道路標示及び道路標示間の幅は予め分かっているので、上記幅より明らかに大きいまたは小さい距離をなす直線成分の組合わせは道路標示の直線成分ではないと判定することができる。
【0032】
なお、上述したエッジ抽出部30、直線抽出部32及び直線成分解析部34により、本発明の連続成分抽出手段が構成される。
【0033】
マッチング処理部36は、プロセッサ18により実現され、上記主画像データの連続成分の頂点と補助画像データとのマッチング処理を行い、対応点との視差及びカメラ位置などの情報を基に三角測量により各連続線分の相対的な3次元位置情報を算出する。
【0034】
地図座標情報算出部38は、プロセッサ18により実現され、位置情報取得部42が取得した座標情報とマッチング処理部36が求めた相対的な3次元位置情報とに基づき、地図上の座標情報を算出する。
【0035】
上記マッチング処理部36により、本発明の3次元位置算出手段が構成される。
【0036】
識別部40は、プロセッサ18により実現され、上記3次元位置情報に含まれる各連続成分の高さ情報に基づき、連続成分が道路標示であるかガードレールであるかを識別する。
【0037】
位置情報取得部42は、GPS(全地球測位システム)、ジャイロ等により実現され、撮像部26による撮像位置及び姿勢を求めて、対応する画像データの座標を決定し、座標情報として地図座標情報算出部38に出力する。
【0038】
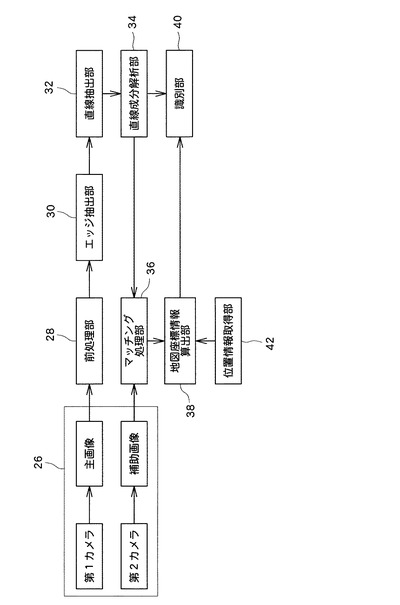
図3には、車載された撮像部26による撮影エリアの説明図が示される。なお、図3では、撮像部26の第1カメラ10及び第2カメラ12の並び方向がXで表され、撮影方向(車両の進行方向)がZで表されている。また、第1カメラ10としての左カメラによる撮影エリアがαで示され、第2カメラとしての右カメラによる撮影エリアがβで示されている。なお、カメラを車両の進行方向と逆向きに取り付けることも可能である。
【0039】
図3において、撮影エリアαの画像データが主画像データであり、撮影エリアβの画像データが補助画像データである。上記マッチング処理部36によるマッチング処理は、撮影エリアαと撮影エリアβとが重複する重複エリアγに存在する対象物の画像データについて行われる。
【0040】
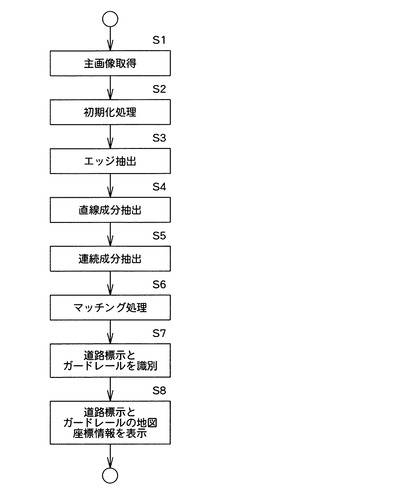
図4には、図1及び図2で説明した本実施形態にかかる道路画像解析装置の動作例のフローが示される。図4において、前処理部28が撮像部26から主画像データを取得する(S1)。ここで、図2では、第1カメラ10が撮像した画像データを主画像データとしているが、第2カメラ12が撮像した画像データを主画像データとしてもよい。
【0041】
前処理部28は、上記取得した主画像データに対して上述した初期化処理を実行し、複数のサブエリアを設定する(S2)。
【0042】
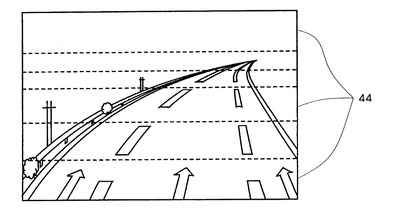
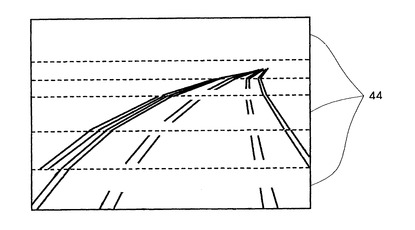
図5には、サブエリアが設定された主画像が示される。図5において、主画像には複数のサブエリア44が設定されており、それぞれ破線で区切られて示されている。
【0043】
次に、エッジ抽出部30が上記サブエリア44毎にエッジ成分を抽出する(S3)。このエッジ抽出処理は、初期化処理された主画像データの各サブエリアにおいて1次水平微分フィルタを使用して輝度や色の明−暗パターン及び暗−明パターンを認識することにより行われる。図5に示された主画像中の道路標示やガードレール、電柱等の柱状構造物は道路等の背景に対して輝度が高いので、明と暗との境界をエッジとして認識することができる。
【0044】
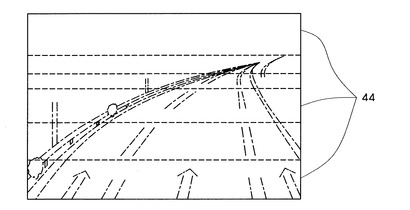
図6には、エッジ抽出処理の説明図が示される。図6において、エッジ抽出部30が抽出した各エッジ成分が一点鎖線で示されている。
【0045】
次に、直線抽出部32が上記抽出されたエッジ成分を解析し、直線成分を抽出する(S4)。
【0046】
図7には、抽出された直線成分の例が実線で示される。この段階では、抽出された直線成分が、道路標示、ガードレール、電柱等の柱状構造物のいずれであるかは区別されていない。
【0047】
そこで、直線成分解析部34は、上記直線成分の位置や傾き、直線間の関連性等に基づいて解析対象となる連続成分を抽出する(S5)。この連続成分を抽出する際には、直線成分の傾きや道路上の位置により電柱等の柱状構造物を除外するのが好適である。これにより、以後の処理を道路標示とガードレールに絞ることができ、処理を簡略化することができる。
【0048】
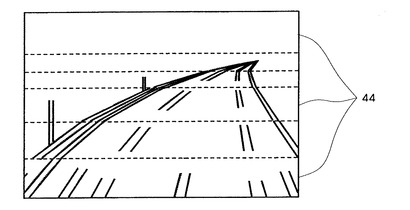
図8には、連続成分の抽出処理の結果の例が示される。図8において、画像中で一定方向に繰り返し存在し、または一定方向に連続している直線成分が抽出されている。
【0049】
次に、マッチング処理部36は、上記連続成分の頂点と補助画像データとのマッチング処理を行う(S6)。
【0050】
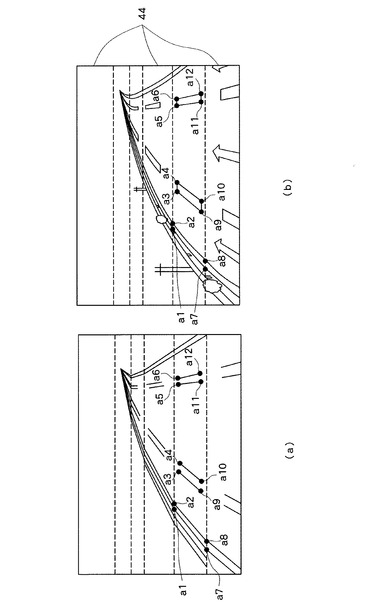
図9(a)、(b)には、マッチング処理の説明図が示される。ここで、図9(a)が直線成分解析部34が抽出した連続成分を示し、図9(b)が補助画像とのマッチング結果を示す。マッチング処理部36は、例えば面積相関法により図9(a)に示される連続成分の端点と補助画像データとのマッチングを行い、対応点との視差、カメラ位置及び姿勢などの情報を基に三角測量により各連続成分の相対的な3次元位置情報を算出する。図9(a)では、端点の例が12点(a1〜a12)示されている。なお、端点の数は上記12点に限定されず、さらに多くてもよい。以上の処理により、連続成分の全ての点ではなく端点のみで対応点探索を行うので、マッチング処理を高精度かつ高速に行うことができる。
【0051】
地図座標情報算出部38は、位置情報取得部42が取得した座標情報とマッチング処理部36が求めた相対的な3次元位置情報とに基づき、地図上の座標情報を算出する。また、識別部40は、上記地図上の座標情報に含まれる各連続成分の高さ情報に基づき、連続成分が道路標示であるかガードレールであるかを識別する(S7)。この処理は、上記高さ情報に所定の閾値を設定し、この閾値より高さが高い連続成分をガードレールとし、低い連続成分を道路標示とすることにより実行することができる。なお、上記識別処理を相対的な座標情報に基づいて行い、その後、位置情報取得部42が取得した座標情報から地図上の座標情報を算出してもよい。
【0052】
上述の解析動作により求められた道路標示及びガードレールの地図上の座標情報は、表示部22に表示される(S8)。図10には、この表示例が示される。図10では、道路標示及びガードレールの属性毎にX、Y、Zの各座標値が示されている。なお、上記座標情報をデータベースとして記憶部20に記憶してもよい。
【0053】
以上の各工程によれば、直線成分解析部34により、解析対象を道路標示とガードレールに絞った上でマッチング処理部36及び識別部40により道路標示とガードレールを識別している。これにより、道路標示とガードレールとを簡易な処理の組合せで明確に区別することができ、正確な位置情報を取得することもできる。
【図面の簡単な説明】
【0054】
【図1】本発明にかかる道路画像解析装置の構成例のブロック図である。
【図2】本発明にかかる道路画像解析装置の各機能を表す機能ブロック図である。
【図3】撮像部による撮影エリアの説明図である。
【図4】本発明にかかる道路画像解析装置の動作例のフロー図である。
【図5】サブエリアが設定された主画像の例を示す図である。
【図6】エッジ抽出処理の説明図である。
【図7】抽出された直線成分の例を示す図である。
【図8】連続成分の抽出処理の結果の例を示す図である。
【図9】マッチング処理の説明図である。
【図10】道路画像の解析結果の表示例を示す図である。
【符号の説明】
【0055】
10 第1カメラ、12 第2カメラ、14、16 インターフェース、18 プロセッサ、20 記憶部、22 表示部、24 操作部、26 撮像部、28 前処理部、30 エッジ抽出部、32 直線抽出部、34 直線成分解析部、36 マッチング処理部、38 地図座標情報算出部、40 識別部、42 位置情報取得部、44 サブエリア。
【技術分野】
【0001】
本発明は、道路画像を解析して車道中央線や車道境界線、車道外側線等の道路標示、ガードレール等を抽出する道路画像解析装置及び道路画像解析方法に関する。
【背景技術】
【0002】
従来より、高精度の道路地図を作成するため、道路標示やガードレール等に関する正確な位置情報を取得する必要があった。この目的のため、例えば車載された単眼視カメラにより取得された2次元画像を用い、その輝度情報に基づいて解析を行う方法が知られている。このような技術の例が、下記特許文献1に開示されている。
【0003】
また、下記特許文献2には、ステレオカメラにより取得したステレオ画像から3次元位置データを算出してカードレール等の側壁を検出する技術が開示されている。
【特許文献1】特開平1−242916号公報
【特許文献2】特開平6−266828号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、上記従来の技術においては、単眼視カメラが取得する2次元画像を使用する場合、道路標示とガードレールとは共に直線状の画像となるので、その区別が困難であるという問題があった。
【0005】
また、ステレオカメラが取得するステレオ画像を使用する場合、画像全体に対してマッチング処理を行う必要があるため処理が重く、また画像を小領域に分割しマッチング処理を高速化した場合であっても、小領域内に距離の異なる複数の物体が混在することになるため十分な距離測定精度が得られないという問題があった。更に、得られた3次元位置情報だけでは道路標示とガードレールとの区別が困難であるという問題があった。
【0006】
本発明は、上記従来の課題に鑑みなされたものであり、その目的は、道路標示とガードレールとを明確かつ高速に区別することができ、正確な位置情報を取得できる道路画像解析装置及び道路画像解析方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明は、道路画像解析装置であって、同一位置を異なる方向から撮影する2台の撮像手段と、前記撮像手段の一方が取得した画像データから連続成分を抽出する連続成分抽出手段と、前記連続成分と前記撮像手段の他方が取得した画像データとを組合せ、前記連続成分の3次元位置情報を算出する3次元位置算出手段と、前記3次元位置算出手段が算出した3次元位置情報に基づいて前記連続成分を識別する識別手段と、を備えることを特徴とする。
【0008】
上記構成によれば、連続成分抽出手段が抽出した連続成分に画像解析処理の対象を絞った上で3次元位置算出手段及び識別手段により連続成分の内容を識別するので、簡易な構成で正確な道路画像解析を行うことができる。
【0009】
ここで、上記連続成分抽出手段は、前記撮像手段の一方が取得した画像データから直線成分を抽出し、この直線成分の位置、傾き及び直線間の関連性に基づいて前記連続成分を抽出することを特徴とする。
【0010】
また、上記3次元位置算出手段は、前記連続成分の端点と前記撮像手段の他方が取得した画像データとをマッチング処理することにより3次元位置情報を算出することを特徴とする。
【0011】
また、上記識別手段は、前記3次元位置情報に含まれる前記連続成分の高さ情報に基づいて前記連続成分を識別することを特徴とする。
【0012】
また、上記連続成分抽出手段、3次元位置算出手段及び識別手段は、道路の走行方向に対して直交する方向に設定されたサブエリアを処理単位とすることを特徴とする。
【0013】
また、本発明は、道路画像解析方法であって、同一位置を異なる2方向から撮影するステップと、前記撮影した一方の画像データから連続成分を抽出するステップと、前記連続成分と前記撮影した他方の画像データとを組合せ、前記連続成分の3次元位置情報を算出するステップと、前記算出した3次元位置情報に基づいて前記連続成分を識別するステップと、を備えることを特徴とする。
【0014】
ここで、上記連続成分を抽出するステップは、前記撮影した一方の画像データから直線成分を抽出し、この直線成分の位置、傾き及び直線間の関連性に基づいて前記連続成分を抽出することを特徴とする。
【0015】
また、上記連続成分の3次元位置情報を算出するステップは、前記連続成分の端点と前記撮影した他方の画像データとをマッチング処理することにより3次元位置情報を算出することを特徴とする。
【0016】
また、上記連続成分を識別するステップは、前記3次元位置情報に含まれる前記連続成分の高さ情報に基づいて前記連続成分を識別することを特徴とする。
【0017】
また、上記連続成分を抽出するステップ、連続成分の3次元位置情報を算出するステップ及び連続成分を識別するステップは、道路の走行方向に対して直交する方向に設定されたサブエリアを処理単位として実行されることを特徴とする。
【発明を実施するための最良の形態】
【0018】
以下、本発明を実施するための最良の形態(以下、実施形態という)を、図面に従って説明する。
【0019】
図1には、本発明にかかる道路画像解析装置の構成例のブロック図が示される。この道路画像解析装置は、例えばパーソナルコンピュータ等で実現することができる。図1において、道路画像解析装置は、第1カメラ10、第2カメラ12、インターフェース14、16、プロセッサ18、記憶部20、表示部22及び操作部24を含んで構成されている。
【0020】
第1カメラ10は、ステレオ画像を取得するために2台1組で設けられるステレオカメラの一方、例えば左カメラである。また、第2カメラ12は、上記ステレオカメラの他方、例えば右カメラである。これらの第1カメラ10及び第2カメラ12は、同一位置を異なる方向からカラー画像またはモノクロ画像を撮影し、本発明の撮像手段を構成する。
【0021】
インターフェース14、16は、それぞれ上記第1カメラ10、第2カメラ12が取得した画像データを受け取り、プロセッサ18等に転送する。
【0022】
プロセッサ18は、CPU(中央処理装置)等により構成され、インターフェース14、16、記憶部20、表示部22及び操作部24とデータのやり取りを行いながらこれらの動作を制御する。
【0023】
記憶部20は、プロセッサ18の作業用のRAM(ランダムアクセスメモリ)、プロセッサ18が実行するプログラム等が格納されたROM(リードオンリーメモリ)、不揮発性メモリとしてのフラッシュメモリ、磁気記憶媒体等で構成されたコンピュータ読み取り可能な記憶媒体である。また、本装置による解析結果である道路標示やガードレールの位置情報を記憶してもよい。
【0024】
表示部22は、例えば液晶ディスプレイ(LCD)等で構成され、道路画像解析装置の解析結果、ユーザが道路画像解析装置への動作指示等を入力するためのユーザインターフェース等を表示する。
【0025】
操作部24は、マウス等のポインティングデバイス、キーボード等の入力装置を含み、ユーザによるデータの入力等に使用する。
【0026】
図2には、上記道路画像解析装置の各機能を表す機能ブロック図が示される。図2において、道路画像解析装置は、撮像部26、前処理部28、エッジ抽出部30、直線抽出部32、直線成分解析部34、マッチング処理部36、地図座標情報算出部38、識別部40及び位置情報取得部42を含んで構成されている。
【0027】
撮像部26は、第1カメラ10、第2カメラ12、インターフェース14、16により実現され、第1カメラ10で取得した画像データを主画像データとして、第2カメラ12で取得した画像データを補助画像データとしてそれぞれ出力する。
【0028】
前処理部28は、プロセッサ18により実現され、上記主画像データに対して画像強調処理等によりエッジ抽出処理を容易にするとともに、画像解析の基本単位である複数のサブエリアに画像を分割する処理を実行する。なお、サブエリアは道路の走行方向に直交するよう設定する。
【0029】
エッジ抽出部30は、プロセッサ18により実現され、上記各サブエリアにおいて、輝度や色が明−暗パターン及び暗−明パターンのエッジ成分の抽出を行う。ここで、エッジ成分とは、上記主画像データに含まれる、道路標示、ガードレール、電柱等の柱状構造物等の輪郭である。また、上記エッジ抽出には、例えば1次水平微分フィルタを使用することができる。
【0030】
直線抽出部32は、プロセッサ18により実現され、上記エッジ抽出部30が抽出したエッジ成分から直線成分を抽出する。この直線成分の抽出は、例えばハフ変換等を使用して行う。
【0031】
直線成分解析部34は、プロセッサ18により実現され、上記直線抽出部32が抽出した直線成分の位置や傾き、直線成分間の関連性等に基づき主画像データ中の連続成分を抽出する。ここで、連続成分とは、画像中で一定方向に繰り返し存在し、または一定方向に連続している直線成分である。例えば、道路上に所定長さで繰り返し描かれる車道境界線や道路端部に所定長さ毎に設けられる電柱等が前者の例であり、道路上に連続線として描かれる車道外側線やガードレール等が後者の例である。このような直線成分の連続性は、各サブエリア内及び各サブエリア相互における上記直線成分の位置関係により直線成分解析部34が判定する。また、電柱等の柱状構造物の直線成分は、その傾きにより除去し、直線解析の対象から除外することができる。さらに、上記直線成分間の関連性は、例えば直線成分相互の間の距離であり、道路上に描かれる道路標示を抽出するために使用される。すなわち、道路標示及び道路標示間の幅は予め分かっているので、上記幅より明らかに大きいまたは小さい距離をなす直線成分の組合わせは道路標示の直線成分ではないと判定することができる。
【0032】
なお、上述したエッジ抽出部30、直線抽出部32及び直線成分解析部34により、本発明の連続成分抽出手段が構成される。
【0033】
マッチング処理部36は、プロセッサ18により実現され、上記主画像データの連続成分の頂点と補助画像データとのマッチング処理を行い、対応点との視差及びカメラ位置などの情報を基に三角測量により各連続線分の相対的な3次元位置情報を算出する。
【0034】
地図座標情報算出部38は、プロセッサ18により実現され、位置情報取得部42が取得した座標情報とマッチング処理部36が求めた相対的な3次元位置情報とに基づき、地図上の座標情報を算出する。
【0035】
上記マッチング処理部36により、本発明の3次元位置算出手段が構成される。
【0036】
識別部40は、プロセッサ18により実現され、上記3次元位置情報に含まれる各連続成分の高さ情報に基づき、連続成分が道路標示であるかガードレールであるかを識別する。
【0037】
位置情報取得部42は、GPS(全地球測位システム)、ジャイロ等により実現され、撮像部26による撮像位置及び姿勢を求めて、対応する画像データの座標を決定し、座標情報として地図座標情報算出部38に出力する。
【0038】
図3には、車載された撮像部26による撮影エリアの説明図が示される。なお、図3では、撮像部26の第1カメラ10及び第2カメラ12の並び方向がXで表され、撮影方向(車両の進行方向)がZで表されている。また、第1カメラ10としての左カメラによる撮影エリアがαで示され、第2カメラとしての右カメラによる撮影エリアがβで示されている。なお、カメラを車両の進行方向と逆向きに取り付けることも可能である。
【0039】
図3において、撮影エリアαの画像データが主画像データであり、撮影エリアβの画像データが補助画像データである。上記マッチング処理部36によるマッチング処理は、撮影エリアαと撮影エリアβとが重複する重複エリアγに存在する対象物の画像データについて行われる。
【0040】
図4には、図1及び図2で説明した本実施形態にかかる道路画像解析装置の動作例のフローが示される。図4において、前処理部28が撮像部26から主画像データを取得する(S1)。ここで、図2では、第1カメラ10が撮像した画像データを主画像データとしているが、第2カメラ12が撮像した画像データを主画像データとしてもよい。
【0041】
前処理部28は、上記取得した主画像データに対して上述した初期化処理を実行し、複数のサブエリアを設定する(S2)。
【0042】
図5には、サブエリアが設定された主画像が示される。図5において、主画像には複数のサブエリア44が設定されており、それぞれ破線で区切られて示されている。
【0043】
次に、エッジ抽出部30が上記サブエリア44毎にエッジ成分を抽出する(S3)。このエッジ抽出処理は、初期化処理された主画像データの各サブエリアにおいて1次水平微分フィルタを使用して輝度や色の明−暗パターン及び暗−明パターンを認識することにより行われる。図5に示された主画像中の道路標示やガードレール、電柱等の柱状構造物は道路等の背景に対して輝度が高いので、明と暗との境界をエッジとして認識することができる。
【0044】
図6には、エッジ抽出処理の説明図が示される。図6において、エッジ抽出部30が抽出した各エッジ成分が一点鎖線で示されている。
【0045】
次に、直線抽出部32が上記抽出されたエッジ成分を解析し、直線成分を抽出する(S4)。
【0046】
図7には、抽出された直線成分の例が実線で示される。この段階では、抽出された直線成分が、道路標示、ガードレール、電柱等の柱状構造物のいずれであるかは区別されていない。
【0047】
そこで、直線成分解析部34は、上記直線成分の位置や傾き、直線間の関連性等に基づいて解析対象となる連続成分を抽出する(S5)。この連続成分を抽出する際には、直線成分の傾きや道路上の位置により電柱等の柱状構造物を除外するのが好適である。これにより、以後の処理を道路標示とガードレールに絞ることができ、処理を簡略化することができる。
【0048】
図8には、連続成分の抽出処理の結果の例が示される。図8において、画像中で一定方向に繰り返し存在し、または一定方向に連続している直線成分が抽出されている。
【0049】
次に、マッチング処理部36は、上記連続成分の頂点と補助画像データとのマッチング処理を行う(S6)。
【0050】
図9(a)、(b)には、マッチング処理の説明図が示される。ここで、図9(a)が直線成分解析部34が抽出した連続成分を示し、図9(b)が補助画像とのマッチング結果を示す。マッチング処理部36は、例えば面積相関法により図9(a)に示される連続成分の端点と補助画像データとのマッチングを行い、対応点との視差、カメラ位置及び姿勢などの情報を基に三角測量により各連続成分の相対的な3次元位置情報を算出する。図9(a)では、端点の例が12点(a1〜a12)示されている。なお、端点の数は上記12点に限定されず、さらに多くてもよい。以上の処理により、連続成分の全ての点ではなく端点のみで対応点探索を行うので、マッチング処理を高精度かつ高速に行うことができる。
【0051】
地図座標情報算出部38は、位置情報取得部42が取得した座標情報とマッチング処理部36が求めた相対的な3次元位置情報とに基づき、地図上の座標情報を算出する。また、識別部40は、上記地図上の座標情報に含まれる各連続成分の高さ情報に基づき、連続成分が道路標示であるかガードレールであるかを識別する(S7)。この処理は、上記高さ情報に所定の閾値を設定し、この閾値より高さが高い連続成分をガードレールとし、低い連続成分を道路標示とすることにより実行することができる。なお、上記識別処理を相対的な座標情報に基づいて行い、その後、位置情報取得部42が取得した座標情報から地図上の座標情報を算出してもよい。
【0052】
上述の解析動作により求められた道路標示及びガードレールの地図上の座標情報は、表示部22に表示される(S8)。図10には、この表示例が示される。図10では、道路標示及びガードレールの属性毎にX、Y、Zの各座標値が示されている。なお、上記座標情報をデータベースとして記憶部20に記憶してもよい。
【0053】
以上の各工程によれば、直線成分解析部34により、解析対象を道路標示とガードレールに絞った上でマッチング処理部36及び識別部40により道路標示とガードレールを識別している。これにより、道路標示とガードレールとを簡易な処理の組合せで明確に区別することができ、正確な位置情報を取得することもできる。
【図面の簡単な説明】
【0054】
【図1】本発明にかかる道路画像解析装置の構成例のブロック図である。
【図2】本発明にかかる道路画像解析装置の各機能を表す機能ブロック図である。
【図3】撮像部による撮影エリアの説明図である。
【図4】本発明にかかる道路画像解析装置の動作例のフロー図である。
【図5】サブエリアが設定された主画像の例を示す図である。
【図6】エッジ抽出処理の説明図である。
【図7】抽出された直線成分の例を示す図である。
【図8】連続成分の抽出処理の結果の例を示す図である。
【図9】マッチング処理の説明図である。
【図10】道路画像の解析結果の表示例を示す図である。
【符号の説明】
【0055】
10 第1カメラ、12 第2カメラ、14、16 インターフェース、18 プロセッサ、20 記憶部、22 表示部、24 操作部、26 撮像部、28 前処理部、30 エッジ抽出部、32 直線抽出部、34 直線成分解析部、36 マッチング処理部、38 地図座標情報算出部、40 識別部、42 位置情報取得部、44 サブエリア。
【特許請求の範囲】
【請求項1】
同一位置を異なる方向から撮影する2台の撮像手段と、
前記撮像手段の一方が取得した画像データから連続成分を抽出する連続成分抽出手段と、
前記連続成分と前記撮像手段の他方が取得した画像データとを組合せ、前記連続成分の3次元位置情報を算出する3次元位置算出手段と、
前記3次元位置算出手段が算出した3次元位置情報に基づいて前記連続成分を識別する識別手段と、
を備えることを特徴とする道路画像解析装置。
【請求項2】
請求項1記載の道路画像解析装置において、前記連続成分抽出手段は、前記撮像手段の一方が取得した画像データから直線成分を抽出し、この直線成分の位置、傾き及び直線間の関連性に基づいて前記連続成分を抽出することを特徴とする道路画像解析装置。
【請求項3】
請求項1または請求項2記載の道路画像解析装置において、前記3次元位置算出手段は、前記連続成分の端点と前記撮像手段の他方が取得した画像データとをマッチング処理することにより3次元位置情報を算出することを特徴とする道路画像解析装置。
【請求項4】
請求項1から請求項3のいずれか一項記載の道路画像解析装置において、前記識別手段は、前記3次元位置情報に含まれる前記連続成分の高さ情報に基づいて前記連続成分を識別することを特徴とする道路画像解析装置。
【請求項5】
請求項1から請求項4のいずれか一項記載の道路画像解析装置において、前記連続成分抽出手段、前記3次元位置算出手段及び前記識別手段は、道路の走行方向に対して直交する方向に設定されたサブエリアを処理単位とすることを特徴とする道路画像解析装置。
【請求項6】
同一位置を異なる2方向から撮影するステップと、
前記撮影した一方の画像データから連続成分を抽出するステップと、
前記連続成分と前記撮影した他方の画像データとを組合せ、前記連続成分の3次元位置情報を算出するステップと、
前記算出した3次元位置情報に基づいて前記連続成分を識別するステップと、
を備えることを特徴とする道路画像解析方法。
【請求項7】
請求項6記載の道路画像解析方法において、前記連続成分を抽出するステップは、前記撮影した一方の画像データから直線成分を抽出し、この直線成分の位置、傾き及び直線間の関連性に基づいて前記連続成分を抽出することを特徴とする道路画像解析方法。
【請求項8】
請求項6または請求項7記載の道路画像解析方法において、前記連続成分の3次元位置情報を算出するステップは、前記連続成分の端点と前記撮影した他方の画像データとをマッチング処理することにより3次元位置情報を算出することを特徴とする道路画像解析方法。
【請求項9】
請求項6から請求項8のいずれか一項記載の道路画像解析方法において、前記連続成分を識別するステップは、前記3次元位置情報に含まれる前記連続成分の高さ情報に基づいて前記連続成分を識別することを特徴とする道路画像解析方法。
【請求項10】
請求項6から請求項9のいずれか一項記載の道路画像解析方法において、前記連続成分を抽出するステップ、前記連続成分の3次元位置情報を算出するステップ及び前記連続成分を識別するステップは、道路の走行方向に対して直交する方向に設定されたサブエリアを処理単位として実行されることを特徴とする道路画像解析方法。
【請求項1】
同一位置を異なる方向から撮影する2台の撮像手段と、
前記撮像手段の一方が取得した画像データから連続成分を抽出する連続成分抽出手段と、
前記連続成分と前記撮像手段の他方が取得した画像データとを組合せ、前記連続成分の3次元位置情報を算出する3次元位置算出手段と、
前記3次元位置算出手段が算出した3次元位置情報に基づいて前記連続成分を識別する識別手段と、
を備えることを特徴とする道路画像解析装置。
【請求項2】
請求項1記載の道路画像解析装置において、前記連続成分抽出手段は、前記撮像手段の一方が取得した画像データから直線成分を抽出し、この直線成分の位置、傾き及び直線間の関連性に基づいて前記連続成分を抽出することを特徴とする道路画像解析装置。
【請求項3】
請求項1または請求項2記載の道路画像解析装置において、前記3次元位置算出手段は、前記連続成分の端点と前記撮像手段の他方が取得した画像データとをマッチング処理することにより3次元位置情報を算出することを特徴とする道路画像解析装置。
【請求項4】
請求項1から請求項3のいずれか一項記載の道路画像解析装置において、前記識別手段は、前記3次元位置情報に含まれる前記連続成分の高さ情報に基づいて前記連続成分を識別することを特徴とする道路画像解析装置。
【請求項5】
請求項1から請求項4のいずれか一項記載の道路画像解析装置において、前記連続成分抽出手段、前記3次元位置算出手段及び前記識別手段は、道路の走行方向に対して直交する方向に設定されたサブエリアを処理単位とすることを特徴とする道路画像解析装置。
【請求項6】
同一位置を異なる2方向から撮影するステップと、
前記撮影した一方の画像データから連続成分を抽出するステップと、
前記連続成分と前記撮影した他方の画像データとを組合せ、前記連続成分の3次元位置情報を算出するステップと、
前記算出した3次元位置情報に基づいて前記連続成分を識別するステップと、
を備えることを特徴とする道路画像解析方法。
【請求項7】
請求項6記載の道路画像解析方法において、前記連続成分を抽出するステップは、前記撮影した一方の画像データから直線成分を抽出し、この直線成分の位置、傾き及び直線間の関連性に基づいて前記連続成分を抽出することを特徴とする道路画像解析方法。
【請求項8】
請求項6または請求項7記載の道路画像解析方法において、前記連続成分の3次元位置情報を算出するステップは、前記連続成分の端点と前記撮影した他方の画像データとをマッチング処理することにより3次元位置情報を算出することを特徴とする道路画像解析方法。
【請求項9】
請求項6から請求項8のいずれか一項記載の道路画像解析方法において、前記連続成分を識別するステップは、前記3次元位置情報に含まれる前記連続成分の高さ情報に基づいて前記連続成分を識別することを特徴とする道路画像解析方法。
【請求項10】
請求項6から請求項9のいずれか一項記載の道路画像解析方法において、前記連続成分を抽出するステップ、前記連続成分の3次元位置情報を算出するステップ及び前記連続成分を識別するステップは、道路の走行方向に対して直交する方向に設定されたサブエリアを処理単位として実行されることを特徴とする道路画像解析方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−265038(P2007−265038A)
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願番号】特願2006−89496(P2006−89496)
【出願日】平成18年3月28日(2006.3.28)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願日】平成18年3月28日(2006.3.28)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
[ Back to top ]