
道路走行情報通知システム、道路走行情報通知方法及びプログラム
【課題】自車位置より前方に走行上の制約がある場合に、操作者に走行制約情報を通知し、車両を目的地まで円滑に走行させることができるようにする。
【解決手段】自車位置を検出する現在地検出部と、地図データを取得する基本情報取得処理手段と、地図データを参照し、自車位置より前方に、所定の方向に向けた走行が制約される走行制約区間があるかどうかを判断する走行制約区間判定処理手段と、走行制約区間がある場合に、走行制約区間の走行制約情報を操作者に通知する通知処理手段とを有する。自車位置より前方に走行制約区間がある場合に、走行制約区間の走行制約情報が操作者に通知されるので、目的地に到達するのに非常に遠回りをしなければならなかったり、運転者がストレスを感じたりしてしまうことがなく、車両を目的地まで円滑に走行させることができる。
【解決手段】自車位置を検出する現在地検出部と、地図データを取得する基本情報取得処理手段と、地図データを参照し、自車位置より前方に、所定の方向に向けた走行が制約される走行制約区間があるかどうかを判断する走行制約区間判定処理手段と、走行制約区間がある場合に、走行制約区間の走行制約情報を操作者に通知する通知処理手段とを有する。自車位置より前方に走行制約区間がある場合に、走行制約区間の走行制約情報が操作者に通知されるので、目的地に到達するのに非常に遠回りをしなければならなかったり、運転者がストレスを感じたりしてしまうことがなく、車両を目的地まで円滑に走行させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路走行情報通知システム、道路走行情報通知方法及びプログラムに関するものである。
【背景技術】
【0002】
従来、ナビゲーション装置においては、操作者である運転者が目的地の名称、住所、電話番号等を入力すると、目的地設定処理が行われ、続いて、運転者が探索条件を設定すると、該探索条件に基づいて、経路探索処理が行われ、地図データに基づいて現在地で表される出発地から目的地までの経路が探索される。そして、表示部に形成された地図画面に、探索された経路、すなわち、探索経路が、車両の現在地である自車位置と共に表示され、探索経路の案内、すなわち、経路案内が行われる。また、地図画面上の探索経路の表示のほかに、音声出力による経路案内も行われる(例えば、特許文献1参照。)。
【0003】
ところで、目的地の方角だけが分かっている場合に、運転者が目的地を入力することなく、地図画面を見て、標識、建物等を目安にして目的地の情報を模索しながら目的地まで車両を走行させることがある。
【特許文献1】特開平10−260054号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、前記従来のナビゲーション装置においては、目的地の周辺で、目的地が車両を走行させている道路より右方又は左方にあることが分かると、自車位置より前方における所定の交差点で車両を右折又は左折させることになるが、車両を走行させている道路が、高架道路、バイパス道路等のように、所定の区間交差点がない等の走行が制約される道路(以下「走行制約道路」という。)である場合、所望の箇所で車両を右折又は左折させることができず、目的地に到達するのに非常に遠回りをしなければならなかったり、運転者がストレスを感じたりしてしまう。したがって、車両を目的地まで円滑に走行させることができない。
【0005】
本発明は、前記従来のナビゲーション装置の問題点を解決して、自車位置より前方において走行が制約される場合に、操作者に走行制約情報を通知し、車両を目的地まで円滑に走行させることができる道路走行情報通知システム、道路走行情報通知方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
そのために、本発明の道路走行情報通知システムにおいては、自車位置を検出する現在地検出部と、地図データを取得する基本情報取得処理手段と、前記地図データを参照し、自車位置より前方に、所定の方向に向けた走行が制約される走行制約区間があるかどうかを判断する走行制約区間判定処理手段と、走行制約区間がある場合に、走行制約区間の走行制約情報を操作者に通知する通知処理手段とを有する。
【発明の効果】
【0007】
本発明によれば、自車位置より前方に、所定の方向に向けた走行が制約される走行制約区間があるがある場合に、走行制約区間の走行制約情報が操作者に通知されるので、目的地に到達するのに非常に遠回りをしなければならなかったり、運転者がストレスを感じたりしてしまうことがなく、車両を目的地まで円滑に走行させることができる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。この場合、道路走行情報通知システムとしてのナビゲーションシステムについて説明する。
【0009】
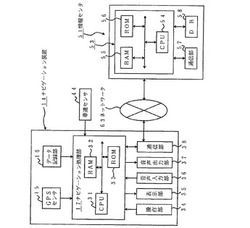
図1は本発明の第1の実施の形態におけるナビゲーションシステムを示すブロック図である。
【0010】
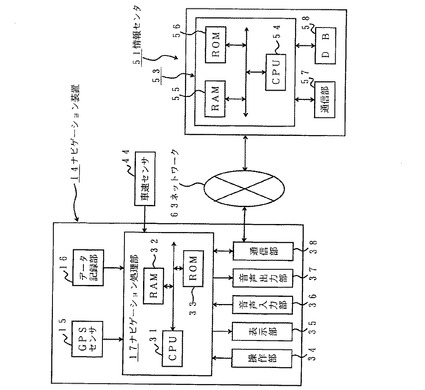
図において、14は情報端末、例えば、車両に搭載された車載装置としてのナビゲーション装置、63はネットワーク、51は情報提供者としての情報センタであり、前記ナビゲーション装置14、ネットワーク63、情報センタ51等によってナビゲーションシステムが構成される。
【0011】
前記ナビゲーション装置14は、車両の現在地を自車位置として、また、車両の方位を自車方位として検出する現在地検出部としてのGPSセンサ15、地図データのほかに各種の情報が記録された情報記録部としてのデータ記録部16、入力された情報に基づいて、ナビゲーション処理等の各種の演算処理を行うナビゲーション処理部17、操作者である運転者が操作することによって所定の入力を行うための第1の入力部としての操作部34、図示されない画面によって各種の表示を行い、運転者に対して通知を行うための第1の出力部としての表示部35、音声によって所定の入力を行うための第2の入力部としての音声入力部36、音声によって運転者に対して通知を行うための第2の出力部としての音声出力部37、及び通信端末として機能する送受信部としての通信部38を備え、前記ナビゲーション処理部17に、GPSセンサ15、データ記録部16、操作部34、表示部35、音声入力部36、音声出力部37及び通信部38が接続される。また、前記ナビゲーション処理部17には、車速を検出する車速検出部としての車速センサ44が接続される。
【0012】
なお、本実施の形態においては、GPSセンサ15によって自車方位を検出するようになっているが、自車方位を検出するために方位検出部としての方位センサを独立させて配設することができる。また、前記GPSセンサ15は、併せて時刻を検出する。
【0013】
前記データ記録部16には、地図データが記録され、該地図データには、交差点(分岐点を含む。)に関する交差点データ、各交差点間を結ぶ道路に関する道路データ、道路の端点(始点及び終点)を表すノードに関するノードデータ、探索用に加工された探索データ、施設に関する施設データ、所定の情報を音声出力部37によって出力するためのデータ、統計データ、走行履歴データ等が記録される。
【0014】
そして、前記交差点データとして、交差点の名称、交差点の座標(緯度及び経度)、交差点の形状、交差点に隣接する主要な施設、交差点の先の主要な地名、連続交差点における交差点間距離等を表すデータが記録される。また、前記交差点データとして、車両の走行が制約される交差点、例えば、立体交差点、一方通行出口の交差点、中央分離帯がある交差点等のように、右折又は左折が制約される交差点については、制約の内容を表すデータが記録される。
【0015】
さらに、交差点データとして、交差点に進入する道路、すなわち、進入道路の方位を表す進入角度、交差点から退出する道路、すなわち、退出道路の方位を表す退出角度等が記録される。
【0016】
また、前記道路データとして、前記道路の始点から終点までの道路リンクを表す道路リンクデータ、及び道路リンク上において、道路形状を表すために道路に沿って設定された複数の設定点としての形状補間点のデータ(以下「補間点データ」という。)が記録される。補間点データには、各形状補間点の番号、座標、方位角(セグメント角度)等が含まれる。該方位角は、当該形状補間点と一つ前側の形状補間点とを結ぶセグメントを前方セグメントとし、当該形状補間点と一つ後側の形状補間点とを結ぶセグメントを後方セグメントとしたときの、前方セグメントに対する後方セグメントの成す角度をいう。
【0017】
そして、前記道路データとして、道路自体に関して、幅員、勾(こう)配、カント、バンク、路面の状態、道路の車線数、車線数の減少する箇所、幅員の狭くなる箇所、踏切り等を表すデータが、コーナに関して、曲率半径、交差点、T字路、コーナの入口及び出口等を表すデータが、道路属性に関して、降坂路、登坂路等を表すデータが、道路種別に関して、国道、県道、細街路等の一般道のほか、高速道路、都市高速道路、有料道路等の高速・有料道を表すデータがそれぞれ記録される。さらに、高速・有料道に関して、入口及び出口の取付道(ランプウェイ)、料金所等を表すデータが記録される。
【0018】
さらに、前記道路データとして、道路上において、所定の方向に向けた走行、本実施の形態においては、目的地の方向に向けた走行が制約される区間が走行制約区間として記録される。
【0019】
該走行制約区間には、少なくとも第1の所定距離、例えば、500〔m〕にわたって、右折及び左折のうちの少なくとも一方の走行が制約される区間が含まれる。したがって、前記走行制約区間には、右折及び左折のいずれも可能な、すなわち、進行方向の変更が可能な交差点がない区間が含まれる。そして、前記走行制約区間が連続する道路、例えば、高架道路、バイパス道路等が走行制約道路として記録される。
【0020】
さらに、前記走行制約区間には、少なくとも第2の所定距離、例えば、300〔m〕にわたって進行方向の変更が可能な交差点がなく、かつ、大きくカーブしている区間も含まれる。前記区間の開始点となる形状補間点から終了点の一つ前の形状補間点までの各形状補間点の方位角を加算することによって得られる角度(以下「道路偏向角度」という。)が所定の閾(しきい)値、本実施の形態においては、45〔°〕以上であるかどうかが判断され、道路偏向角度が45〔°〕以上である場合、前記区間は走行制約区間とされる。
【0021】
すなわち、形状補間点で表される第1の地点から形状補間点で表される第2の地点までの距離が300〔m〕以上であるときの、前記第1の地点の前方セグメント、すなわち、第1の地点の直前の道路に対して、前記第2の地点の前方セグメント、すなわち、第2の地点の直前の道路の成す角度は、前記道路偏向角度になる。そして、第1の地点が所定の交差点であり、第2の地点が次の交差点である場合、所定の交差点と次の交差点との間の距離が300〔m〕以上であるときの、前記所定の交差点への進入道路に対して次の交差点への進入道路の成す角度は、前記道路偏向角度になる。
【0022】
なお、走行制約区間を表すデータとしては、走行制約区間の開始点となるノード、走行制約区間の終了点となるノード、走行制約区間の距離等が記録され、走行制約道路を表すデータとしては、走行制約道路の開始点となるノード、走行制約道路の終了点となるノード、走行制約道路の距離等が記録される。
【0023】
前記データ記録部16は、前記各種のデータを記録するための、ハードディスク、CD、DVD、光ディスク等の図示されないディスクのほかに、各種のデータを読み出したり、書き込んだりするための読出・書込ヘッド等の図示されないヘッドを備える。なお、前記データ記録部16にメモリカード等を使用することができる。
【0024】
また、前記ナビゲーション処理部17は、ナビゲーション装置14の全体の制御を行う制御装置としての、かつ、演算装置としてのCPU31、該CPU31が各種の演算処理を行うに当たってワーキングメモリとして使用されるRAM32、制御用のプログラムのほかに、目的地までの経路の探索、探索経路の案内、すなわち、経路案内等を行うための各種のプログラムが記録されたROM33、各種のデータ、プログラム等を記録するために使用される図示されないフラッシュメモリ等を備える。
【0025】
前記操作部34は、運転者が操作することによってナビゲーション装置14において各種の機能を実現させるためのものであり、ナビゲーション装置14とは独立させて配設されたリモコン、キーボード、マウス等のほかに、ナビゲーション装置14の筐(きょう)体等に操作要素として配設されたスイッチ、ボタン、キー、ダイヤル等から成る。また、前記表示部35としてはディスプレイが使用される。本実施の形態においては、操作部34及び表示部35として、操作部の機能を併せて有するタッチパネルを使用することができ、該タッチパネルにおいては、画面に画像による操作要素としてキー、スイッチ、ボタン等が表示され、キー、スイッチ、ボタン等をタッチすることによって、所定の入力操作を行うことができる。
【0026】
また、音声入力部36は、図示されないマイクロホン等によって構成され、音声によって必要な情報を入力することができる。さらに、音声出力部37は、図示されない音声合成装置及びスピーカを備え、音声出力部37から各種の情報が音声で出力される。
【0027】
前記通信部38は、情報提供者としてのVICS(登録商標)センタ等の図示されない道路交通情報センタ等から送られた交通情報、一般情報等の各種の情報を、道路に沿って配設された電波ビーコン装置、光ビーコン装置等を介して電波ビーコン、光ビーコン等として受信するためのビーコンレシーバ、ラジオ局を介してラジオ放送、例えば、FM多重放送を受信するためのラジオ受信機等を備える。なお、前記交通情報には、渋滞情報、規制情報、駐車場情報、交通事故情報、サービスエリアの混雑状況情報等が含まれ、一般情報には、ニュース、天気予報等が含まれる。なお、前記通信部38は、前記情報センタ51から交通情報、一般情報等の各種の情報を受信することもできる。そのために、前記情報センタ51は、サーバ53、該サーバ53に接続された通信部57及び情報記録部としてのデータベース(DB)58を備え、前記サーバ53は、制御装置としての、かつ、演算装置としてのCPU54、RAM55、ROM56等を備える。また、前記データベース58に、前記データ記録部16に記録された各種のデータと同様のデータが記録される。さらに、情報センタ51は、複数の車両(自車又は他車)から収集した走行履歴データをリアルタイムに提供することができる。
【0028】
なお、前記ナビゲーションシステム、ナビゲーション処理部17、CPU31、54、サーバ53等は、各種のプログラム、データ等に基づいてコンピュータとして機能する。また、データ記録部16、RAM32、55、ROM33、56、データベース58、フラッシュメモリ等によって記憶装置又は記録媒体が構成される。そして、演算装置として、CPU31、54に代えてMPU等を使用することもできる。
【0029】
次に、前記構成のナビゲーションシステムの基本動作について説明する。
【0030】
まず、運転者によって操作部34が操作され、ナビゲーション装置14が起動されると、CPU31の図示されない初期化処理手段は、初期化処理を行い、GPSセンサ15によって検出された自車位置及び自車方位を読み込むとともに、各種のデータを初期化する。なお、前記CPU31の図示されないマッチング処理手段は、マッチング処理を行い、読み込まれた自車位置の軌跡、及び自車位置の周辺の道路を構成する各道路リンクの形状、配列等に基づいて、自車位置がいずれの道路リンク上に位置するかの判定を行うことによって、自車位置を特定する。
【0031】
続いて、CPU31の図示されない基本情報取得処理手段は、基本情報取得処理を行い、前記地図データを、データ記録部16から読み出して取得するか、又は通信部38を介して情報センタ51等から受信して取得する。
【0032】
そして、前記CPU31の図示されない表示処理手段は、表示処理を行い、前記表示部35に地図画面を形成し、該地図画面に自車位置、自車位置の周辺の地図及び自車方位を表示する。したがって、運転者は、前記自車位置、自車位置の周辺の地図及び自車方位に従って車両を走行させることができる。
【0033】
また、運転者が操作部34を操作して所定の地点を目的地として入力すると、CPU31の図示されない目的地設定処理手段は、目的地設定処理を行い、目的地を設定する。なお、必要に応じて出発地を入力し、設定することもできる。また、あらかじめ所定の地点を登録地点として登録しておき、登録地点を目的地として設定することができる。
【0034】
続いて、運転者が操作部34を操作して探索条件を入力すると、CPU31の図示されない経路探索処理手段は、経路探索処理を行い、前記自車位置、目的地、探索条件等を読み込むとともに、データ記録部16から探索データ等を読み出し、自車位置、目的地及び探索データに基づいて、自車位置で表される出発地から目的地までの経路を前記探索条件で探索し、探索経路を表す経路データを出力する。この場合、各道路リンクごとに付与されたリンクコストの合計が最も小さい経路が探索経路とされる。
【0035】
そして、前記CPU31の図示されない案内処理手段は、案内処理を行い、経路案内を行う。そのために、前記案内処理手段の経路表示処理手段は、経路表示処理を行い、前記経路データを読み込み、該経路データに従って前記地図画面に探索経路を表示する。この場合、必要に応じて、前記案内処理手段の音声出力処理手段は、音声出力処理を行い、音声出力部37から探索経路を音声で出力して経路案内を行う。
【0036】
また、前記表示処理手段は、通信部38を介して交通情報を受信すると、交通情報を交通状況指標としての渋滞帯に変換し、該渋滞帯を前記地図画面上の道路に沿って表示する。この場合、前記渋滞帯は、渋滞の始点から終点まで延在させて表示され、かつ、渋滞の度合いに応じて赤、橙(だいだい)、緑等の色で表示される。このようにして、運転者は、車両を走行させる予定の経路、探索経路等における道路の渋滞状況を知ることができる。
【0037】
ところで、前記経路案内においては、所定の交差点で探索経路の案内をする必要がある場合、前記交差点が案内交差点として設定される。そのために、前記案内処理手段の案内交差点設定処理手段は、案内交差点設定処理を行い、経路データに従って、すなわち、前記探索経路に基づいて、車両を左折、右折又は直進させる必要がある交差点があるかどうかを判断し、車両を左折、右折又は直進させる必要がある交差点がある場合、該交差点を案内交差点として設定する。
【0038】
続いて、前記案内処理手段の案内点拡大図形成処理手段は、案内点拡大図形成処理を行い、車両が案内交差点に到達する前に、地図画面の所定の領域に案内交差点の拡大図、すなわち、案内点拡大図としての交差点拡大図を形成し、交差点拡大図による経路案内を行う。そのために、探索経路上の前記案内交差点より手前(自車位置側)の、設定された距離だけ離れた箇所に、案内点拡大図表示地点が設定され、車両が案内点拡大図表示地点に到達すると、前記交差点拡大図が表示される。
【0039】
この場合、該交差点拡大図に、案内交差点の周辺の地図、探索経路、案内交差点において目印になる施設等の陸標が表示される。なお、高速道路、都市高速道路、有料道路等の自動車専用の有料道において、ジャンクション等と合流したり分岐したりする交差点も案内交差点として設定される。
【0040】
そして、前記案内処理手段の経路案内地点設定処理手段は、経路案内地点設定処理を行い、探索経路上の前記案内交差点より手前の、各設定された距離だけ離れた箇所に、一つ以上、本実施の形態においては、複数の経路案内地点を設定し、各経路案内地点に車両が到達すると、前記音声出力処理手段は、案内交差点について、経路案内地点ごとにあらかじめ設定された内容の経路案内を音声出力部37からの音声、すなわち、案内フレーズで出力する。
【0041】
ところで、目的地の方角だけが分かっている場合に、運転者が目的地を入力することなく、地図画面を見て、標識、建物等を目安にして、目的地の情報を模索しながら目的地まで車両を走行させることがある。
【0042】
その場合、目的地の周辺で、目的地が車両を走行させている道路より右方又は左方にあることが分かると、自車位置より前方における所定の交差点で車両を右折又は左折させることになるが、車両を走行させている道路が、高架道路、バイパス道路等の走行制約道路である場合、そのまま走行制約道路に沿って車両を走行させると、前記所定の交差点で右折又は左折をすることができず、目的地に到達するのに非常に遠回りをしなければならなかったり、運転者がストレスを感じたりしてしまう。したがって、車両を目的地まで円滑に走行させることができない。
【0043】
そこで、本実施の形態においては、CPU31の図示されない走行制約情報通知処理手段によって、走行制約情報通知処理を行い、自車位置の周辺の走行制約道路における走行上の制約の情報、すなわち、走行制約情報を運転者に通知するようにしている。
【0044】
図2は本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示すフローチャート、図3は本発明の第1の実施の形態における自車位置の周辺を表す図、図4は本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第1の図、図5は本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第2の図、図6は本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第3の図、図7は本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第4の図である。
【0045】
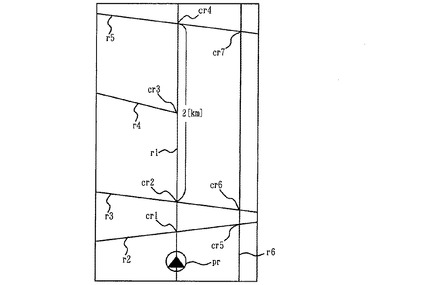
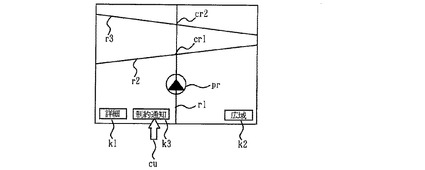
図において、prは自車位置、ri(i=1、2、…)は道路、crj(j=1、2、…)は交差点、km(m=1、2、…)は地図画面上に形成された操作要素としてのキー、cuは地図画面上の操作箇所を表すカーソルである。
【0046】
この場合、各道路riのうちの道路r1は走行制約道路、前記道路r1上の交差点cr2〜cr4の区間は、2〔km〕にわたって右折が制約される走行制約区間である。また、道路r1と道路r2〜r5とは、交差点cr1〜cr4で交差し、道路r6と道路r2、r3、r5とは交差点cr5〜cr7で交差する。
【0047】
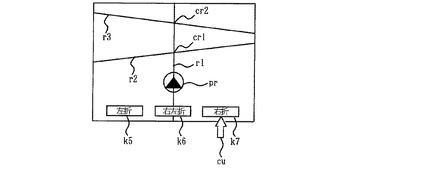
また、キーk1は、地図画面に詳細地図を表示するための詳細キー、キーk2は、地図画面に広域地図を表示するための広域キー、キーk3は地図画面上において走行制約情報が通知されるのを要求するための制約通知要求キー、キーk5は通知される走行制約情報を特定し、左折が制約される走行制約区間の走行制約情報を指定するための左折キー、キーk6は通知される走行制約情報を特定し、右折及び左折が制約される走行制約区間の走行制約情報を指定するための右左折キー、キーk7は通知される走行制約情報を特定し、右折が制約される走行制約区間を指定するための右折キー、キーk8は走行制約情報の通知の解除を要求するための通知解除要求キーである。なお、前記キーk5は、車両を走行させている道路より左方に目的地がある場合に、前記キーk6は、車両を走行させている道路の左方又は右方の近傍に目的地がある場合に、前記キーk7は、車両を走行させている道路より右方に目的地がある場合に押下するために表示される。
【0048】
この場合、運転者が目的地の情報を模索しながら車両を走行させているときに、走行制約情報通知処理手段の操作判断処理手段は、操作判断処理を行い、運転者によってキーk3が押下されるのを待機する。
【0049】
そして、車両が目的地の周辺に到達し、目的地が車両を走行させている道路より右方にあることが分かり、図4に示されるように、運転者がキーk3を押下し、走行制約情報が通知されるのを要求すると、走行制約情報通知処理手段のモード切換処理手段は、モード切換処理を行い、走行が制約されない道路に沿って車両を走行させる標準モードから、走行制約情報を運転者に通知する走行制約情報通知モードにモードを切り換える。
【0050】
続いて、前記走行制約情報通知処理手段の走行制約情報設定処理手段は、走行制約情報設定処理を行い、図5に示されるように、地図画面上にキーk5〜k7を表示し、運転者に走行制約情報を特定するように促す。これに対して、運転者が、車両を走行させている道路からみて、目的地が左方にあるか、左方又は右方の近傍にあるか、又は右方にあるかを判断し、キーk5〜7を押下する。そして、例えば、運転者がキーk7を押下し、走行制約情報を特定し、右折が制約される走行制約区間の走行制約情報を指定すると、前記走行制約情報通知処理手段の走行制約区間判定処理手段は、走行制約区間判定処理を行い、自車位置prを読み込み、道路データを参照し、自車位置prより前方に、本実施の形態においては、自車位置prより前方における周辺、例えば、自車位置prを中心とする所定の半径内の領域に走行制約区間があるかどうかを判断し、走行制約区間がある場合に、前記走行制約情報通知処理手段の走行制約情報取得処理手段は、走行制約情報取得処理を行い、右折が制約される走行制約区間の走行制約情報を読み出す。また、高架道路、バイパス道路等の走行制約道路以外の、車両が走行している道路において、所定の区間が、右折が制約される場合には、前記区間の情報を走行制約区間の走行制約情報として読み出すことができる。
【0051】
さらに、前記走行制約区間判定処理手段は、自車位置prを読み込み、交差点データ及び道路データを参照し、車両が走行している道路上の各交差点において、車両の右折が制約されるかどうかを判断し、自車位置prより前方の所定の区間、例えば、交差点cr2、cr4間のように、設定された距離、本実施の形態においては、500〔m〕以上にわたって各交差点において車両の右折が制約される場合、前記所定の区間を、走行制約区間とすることができる。
【0052】
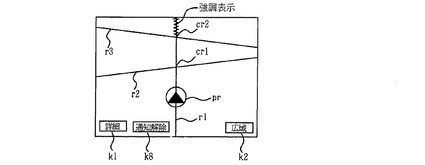
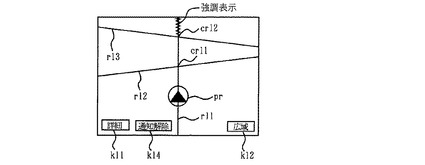
続いて、前記走行制約情報通知処理手段の第1の通知処理手段としての走行制約区間表示処理手段は、第1の通知処理としての走行制約区間表示処理を行い、図6に示されるように、走行制約区間を強調表示することによって、運転者に走行制約情報を通知する。前記強調表示は、道路の色を変更したり、道路を点滅させたりすることによって行われる。
【0053】
次に、前記走行制約情報通知処理手段の走行道路判断処理手段は、走行道路判断処理を行い、車両が走行制約道路上を走行しているかどうかを判断する。車両が走行制約道路上を走行している場合、前記走行制約情報通知処理手段の最終交差点設定処理手段は、最終交差点設定処理を行い、走行が制約されない道路における最終の交差点、すなわち、最終交差点を設定する。なお、本実施の形態において、最終交差点は、走行制約区間が開始される交差点でもある。
【0054】
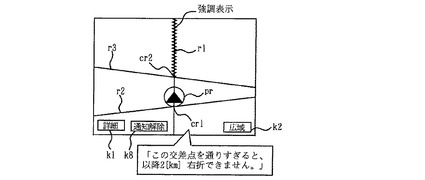
そして、前記走行制約情報通知処理手段の最終交差点予告地点設定処理手段は、最終交差点予告地点設定処理を行い、最終交差点より手前(自車位置側)の、設定された距離だけ離れた箇所に、最終交差点予告地点を設定する。そして、車両が最終交差点予告地点に到達すると、前記走行制約情報通知処理手段の第2の通知処理手段としての音声出力処理手段は、第2の通知処理としての音声出力処理を行い、最終交差点について、図7に示されるように、あらかじめ設定された内容の経路案内を音声出力部37からの音声、すなわち、「この交差点を通りすぎると、以降2〔km〕右折できません。」等の案内フレーズで出力することによって、運転者に、走行制約区間を回避するように走行制約情報を通知する。
【0055】
このように、運転者に走行制約区間についての経路案内が音声出力部37からの案内フレーズで出力される。なお、前記走行制約区間を、距離でレベル分けし、レベルごとに案内フレーズを異ならせることができる。
【0056】
続いて、前記操作判断処理手段は、運転者によってキーk3が再度押下されるのを待機する。
【0057】
このように、本実施の形態においては、自車位置prの周辺に走行制約区間がある場合、地図画面上で走行制約区間が強調表示されるので、運転者は、走行制約区間を使用することなく、車両を走行させることができる。
【0058】
また、車両を走行制約道路上で走行させているときに、走行制約区間において走行が制約される旨の通知が運転者にされるので、目的地に到達するのに非常に遠回りをしなければならなかったり、運転者がストレスを感じたりしてしまうことがなく、目的地まで車両を円滑に走行させることができる。
【0059】
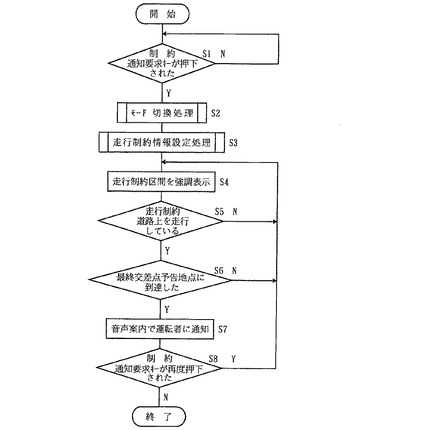
次に、フローチャートについて説明する。
ステップS1 制約通知要求キーが押下されるのを待機し、制約通知要求キーが押下された場合はステップS2に進む。
ステップS2 モード切換処理を行う。
ステップS3 走行制約情報設定処理を行う。
ステップS4 走行制約区間を強調表示する。
ステップS5 走行制約道路上を走行しているかどうかを判断する。走行制約道路上を走行している場合はステップS6に進み、走行制約道路上を走行していない場合はステップS4に戻る。
ステップS6 最終交差点予告地点に到達したかどうかを判断する。最終交差点予告地点到達した場合はステップS7に進み、到達していない場合はステップS4に戻る。
ステップS7 音声案内で運転者に通知する。
ステップS8 制約通知要求キーが再度押下されたかどうかを判断する。制約通知要求キーが再度押下された場合はステップS4に戻り、押下されなかった場合は処理を終了する。
【0060】
ところで、目的地に向けて車両を走行させているときに、運転者は車両を目的地の方向に向けて走行させることになるが、自車位置より前方において目的地の方向と異なる方向に道路がカーブ(湾曲)することがある。その場合、カーブした先の交差点で車両を右折又は左折させて再び車両を目的地の方向に向けて走行させることになるが、それに伴って、運転者が方向感覚を失ったり、目的地に到達するのに非常に遠回りをしなければならなかったり、運転者がストレスを感じたりして、車両を目的地まで円滑に走行させることができなくなってしまう。
【0061】
そこで、自車位置より前方において道路がカーブする場合に、その旨を運転者に通知することができるようにした本発明の第2の実施の形態について説明する。なお、第1の実施の形態と同じ構造を有するものについては、同じ符号を付与し、同じ構造を有することによる発明の効果については同実施の形態の効果を援用する。
【0062】
図8は本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示すフローチャート、図9は本発明の第2の実施の形態における自車位置の周辺を表す図、図10は本発明の第2の実施の形態における交差点における進入角度の説明図、図11は本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示す第1の図、図12は本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示す第2の図、図13は本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示す第3の図である。
【0063】
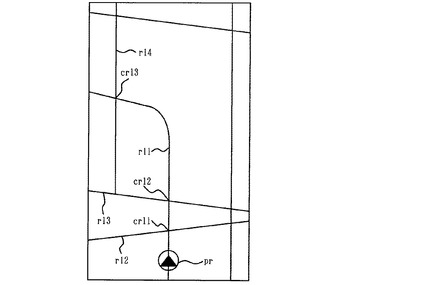
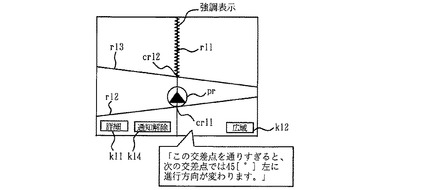
図において、prは自車位置、ri’(i’=11、12、…)は道路、crj’(j’=11、12、…)は交差点、km’(m’=11、12、…)は地図画面上に形成された操作要素としてのキー、cuは地図画面上の操作箇所を表すカーソルである。前記道路r11と道路r12〜r14とは、交差点cr11〜cr13で交差する。
【0064】
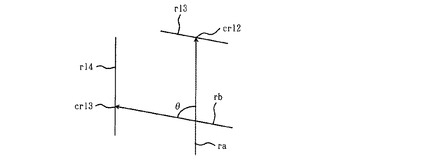
この場合、図10に示されるように、前記道路r11上の、交差点cr12の進入道路をraとし、交差点cr12より一つ先の交差点cr13の進入道路をrbとしたとき、進入道路ra、rbが成す角度を道路湾曲角度θで表すことができ、道路データを作成するにあたり道路湾曲角度θが45〔°〕以上であるかどうかがあらかじめ判断され、道路湾曲角度θが45〔°〕以上である場合、交差点cr12、cr13の区間は、車両の走行が制約される走行制約区間とされ、情報記録部としてのデータ記録部16に記録される。なお、図9においては、道路r1が左方にカーブしているが、道路r1が右方にカーブしていても、走行制約区間とされる。
【0065】
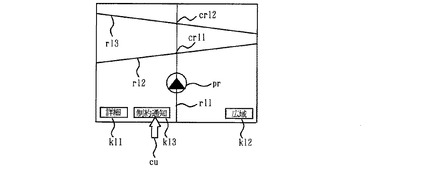
また、キーk11は、地図画面に詳細地図を表示するための詳細キー、キーk12は、地図画面に広域地図を表示するための広域キー、キーk13は地図画面上において走行制約情報が通知されるのを要求するための制約通知要求キー、キーk14は走行制約情報の通知の解除を要求するための通知解除要求キーである。
【0066】
この場合、運転者が目的地の情報を模索しながら車両を所定の方向、本実施の形態においては、目的地の方向に向けて走行させているときに、前記走行制約情報通知処理手段の操作判断処理手段は、運転者によってキーk13が押下されるのを待機する。
【0067】
そして、図11に示されるように、運転者がキーk13を押下し、走行制約情報が通知されるのを要求すると、前記モード切換処理手段は、走行が制約されない道路に沿って車両を走行させる標準モードから、走行制約情報を運転者に通知する走行制約情報通知モードにモードを切り換える。
【0068】
続いて、前記走行制約区間判定処理手段は、自車位置prを読み込み、道路データを参照し、自車位置prより前方に、本実施の形態においては、自車位置prより前方における周辺、例えば、自車位置prを中心とする所定の半径内の領域に走行制約区間があるかどうかを判断し、走行制約区間がある場合に、前記走行制約情報取得処理手段は、走行制約区間の走行制約情報を読み出す。
【0069】
さらに、前記走行制約区間判定処理手段は、自車位置prを読み込み、交差点データ及び道路データを参照し、車両が走行している道路上における所定の区間において、少なくとも第2の所定距離、例えば、300〔m〕にわたって進行方向の変更が可能な交差点がなく、かつ、前記区間が大きくカーブしているかどうかを判断し、300〔m〕にわたって進行方向の変更が可能な交差点がなく、かつ、前記区間が大きくカーブしている場合に、前記所定の区間を走行制約区間とする。
【0070】
そして、前記走行制約区間表示処理手段は、図12に示されるように、走行制約区間(道路r11上の交差点cr12から交差点cr13までの区間)を強調表示することによって、運転者に走行制約情報を通知する。前記強調表示は、道路の色を変更したり、道路を点滅させたりすることによって行われる。
【0071】
次に、前記最終交差点設定処理手段は、走行が制約されない道路における最終の交差点、すなわち、最終交差点(交差点cr12)を設定する。なお、本実施の形態において、最終交差点は、走行制約区間が開始される交差点でもある。
【0072】
そして、前記最終交差点予告地点設定処理手段は、最終交差点より手前(自車位置側)の、設定された距離だけ離れた箇所に、最終交差点予告地点を設定する。そして、車両が最終交差点予告地点に到達すると、前記音声出力処理手段は、最終交差点について、図13に示されるように、あらかじめ設定された内容の経路案内を第2の出力部としての音声出力部37からの音声、すなわち、「この交差点を通りすぎると、次の交差点では45〔°〕左に進行方向が変わります。」等の案内フレーズで出力することによって、運転者に、走行制約区間を回避するように走行制約情報を通知する。
【0073】
このように、運転者に走行制約区間についての経路案内が音声出力部37からの案内フレーズで出力される。なお、前記走行制約区間を、距離でレベル分けし、レベルごとに案内フレーズを異ならせることができる。
【0074】
続いて、前記操作判断処理手段は、運転者によってキーk13が再度押下されるのを待機する。
【0075】
このように、本実施の形態においては、自車位置prの周辺に走行制約区間がある場合、地図画面上で走行制約区間が強調表示されるので、運転者は、走行制約区間を使用することなく、車両を走行させることができる。
【0076】
また、車両を走行させているときに、自車位置prの前方に走行制約区間がある場合、走行制約区間における走行制約情報が案内フレーズで運転者に通知されるので、運転者が方向感覚を失ったり、目的地に到達するのに非常に遠回りをしなければならなかったり、運転者がストレスを感じたりしてしまうことがなく、目的地まで車両を円滑に走行させることができる。
【0077】
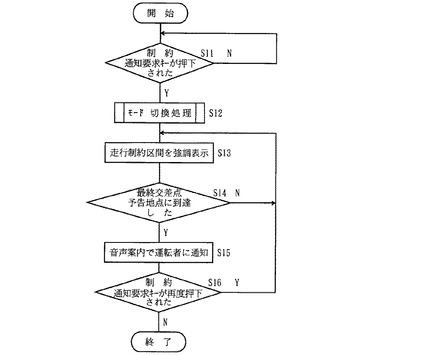
次に、フローチャートについて説明する。
ステップS11 制約通知要求キーが押下されるのを待機し、制約通知要求キーが押下された場合はステップS12に進む。
ステップS12 モード切換処理を行う。
ステップS13 走行制約区間を強調表示する。
ステップS14 最終交差点予告地点に到達したかどうかを判断する。最終交差点予告地点に到達した場合はステップS15に進み、到達していない場合はステップS13に戻る。
ステップS15 音声案内で運転者に通知する。
ステップS16 制約通知要求キーが再度押下されたかどうかを判断する。制約通知要求キーが再度押下された場合はステップS13に戻り、再度押下されなかった場合は処理を終了する。
【0078】
本実施の形態においては、少なくとも第2の所定距離、例えば、300〔m〕にわたって進行方向の変更が可能な交差点がなく、かつ、大きくカーブしている区間が走行制約区間に含まれるようになっているが、少なくとも第2の所定距離、例えば、300〔m〕にわたって右折することができる交差点がなく、かつ、大きく左方にカーブしている区間、及び少なくとも第1の所定距離、例えば、500〔m〕にわたって左折することができる交差点がなく、かつ、大きく右方にカーブしている区間を走行制約区間に含むことができる。
【0079】
また、本実施の形態においては、走行制約区間の走行制約情報を指定することができないようになっているが、第1の実施の形態と同様に、走行制約区間の走行制約情報を指定し、大きく左方にカーブしている走行制約区間の走行制約情報を指定したり、大きく右方にカーブしている走行制約区間の走行制約情報を指定したりすることができる。その場合、地図画面に走行制約情報を指定するための左方カーブキー、右方カーブキー等が表示される。
【0080】
また、第1の実施の形態においては、少なくとも第1の所定距離、例えば、500〔m〕以上にわたって左折又は右折が制約される区間が走行制約区間とされ、第2の実施の形態においては、少なくとも第2の所定距離、例えば、300〔m〕以上にわたって進行方向の変更が可能な交差点がなく、かつ、大きくカーブしている区間が走行制約区間にされるが、第1、第2の実施の形態を組み合わせ、少なくとも第1の所定距離、例えば、500〔m〕以上にわたり、左折又は右折が制約される区間、若しくは、少なくとも第2の所定距離、例えば、300〔m〕以上にわたって進行方向の変更が可能な交差点がなく、かつ、大きくカーブしている区間を走行制約区間とすることができる。そして、少なくとも第2の所定距離、例えば、300〔m〕以上にわたって進行方向の変更が可能な交差点がなく、かつ、その先が行き止まりである区間を走行制約区間とすることもできる。
【0081】
さらに、距離に関係なく左折又は右折が制約される区間、若しくは、少なくとも第2の所定距離、例えば、300〔m〕以上にわたって進行方向の変更が可能な交差点がなく、かつ、大きくカーブしている区間を走行制約区間とすることすることができる。
【0082】
なお、本発明は前記各実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【図面の簡単な説明】
【0083】
【図1】本発明の第1の実施の形態におけるナビゲーションシステムを示すブロック図である。
【図2】本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示すフローチャートである。
【図3】本発明の第1の実施の形態における自車位置の周辺を表す図である。
【図4】本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第1の図である。
【図5】本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第2の図である。
【図6】本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第3の図である。
【図7】本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第4の図である。
【図8】本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示すフローチャートである。
【図9】本発明の第2の実施の形態における自車位置の周辺を表す図である。
【図10】本発明の第2の実施の形態における交差点における進入角度の説明図である。
【図11】本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示す第1の図である。
【図12】本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示す第2の図である。
【図13】本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示す第3の図である。
【符号の説明】
【0084】
14 ナビゲーション装置
15 GPSセンサ
31 CPU
51 情報センタ
63 ネットワーク
pr 自車位置
【技術分野】
【0001】
本発明は、道路走行情報通知システム、道路走行情報通知方法及びプログラムに関するものである。
【背景技術】
【0002】
従来、ナビゲーション装置においては、操作者である運転者が目的地の名称、住所、電話番号等を入力すると、目的地設定処理が行われ、続いて、運転者が探索条件を設定すると、該探索条件に基づいて、経路探索処理が行われ、地図データに基づいて現在地で表される出発地から目的地までの経路が探索される。そして、表示部に形成された地図画面に、探索された経路、すなわち、探索経路が、車両の現在地である自車位置と共に表示され、探索経路の案内、すなわち、経路案内が行われる。また、地図画面上の探索経路の表示のほかに、音声出力による経路案内も行われる(例えば、特許文献1参照。)。
【0003】
ところで、目的地の方角だけが分かっている場合に、運転者が目的地を入力することなく、地図画面を見て、標識、建物等を目安にして目的地の情報を模索しながら目的地まで車両を走行させることがある。
【特許文献1】特開平10−260054号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、前記従来のナビゲーション装置においては、目的地の周辺で、目的地が車両を走行させている道路より右方又は左方にあることが分かると、自車位置より前方における所定の交差点で車両を右折又は左折させることになるが、車両を走行させている道路が、高架道路、バイパス道路等のように、所定の区間交差点がない等の走行が制約される道路(以下「走行制約道路」という。)である場合、所望の箇所で車両を右折又は左折させることができず、目的地に到達するのに非常に遠回りをしなければならなかったり、運転者がストレスを感じたりしてしまう。したがって、車両を目的地まで円滑に走行させることができない。
【0005】
本発明は、前記従来のナビゲーション装置の問題点を解決して、自車位置より前方において走行が制約される場合に、操作者に走行制約情報を通知し、車両を目的地まで円滑に走行させることができる道路走行情報通知システム、道路走行情報通知方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
そのために、本発明の道路走行情報通知システムにおいては、自車位置を検出する現在地検出部と、地図データを取得する基本情報取得処理手段と、前記地図データを参照し、自車位置より前方に、所定の方向に向けた走行が制約される走行制約区間があるかどうかを判断する走行制約区間判定処理手段と、走行制約区間がある場合に、走行制約区間の走行制約情報を操作者に通知する通知処理手段とを有する。
【発明の効果】
【0007】
本発明によれば、自車位置より前方に、所定の方向に向けた走行が制約される走行制約区間があるがある場合に、走行制約区間の走行制約情報が操作者に通知されるので、目的地に到達するのに非常に遠回りをしなければならなかったり、運転者がストレスを感じたりしてしまうことがなく、車両を目的地まで円滑に走行させることができる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。この場合、道路走行情報通知システムとしてのナビゲーションシステムについて説明する。
【0009】
図1は本発明の第1の実施の形態におけるナビゲーションシステムを示すブロック図である。
【0010】
図において、14は情報端末、例えば、車両に搭載された車載装置としてのナビゲーション装置、63はネットワーク、51は情報提供者としての情報センタであり、前記ナビゲーション装置14、ネットワーク63、情報センタ51等によってナビゲーションシステムが構成される。
【0011】
前記ナビゲーション装置14は、車両の現在地を自車位置として、また、車両の方位を自車方位として検出する現在地検出部としてのGPSセンサ15、地図データのほかに各種の情報が記録された情報記録部としてのデータ記録部16、入力された情報に基づいて、ナビゲーション処理等の各種の演算処理を行うナビゲーション処理部17、操作者である運転者が操作することによって所定の入力を行うための第1の入力部としての操作部34、図示されない画面によって各種の表示を行い、運転者に対して通知を行うための第1の出力部としての表示部35、音声によって所定の入力を行うための第2の入力部としての音声入力部36、音声によって運転者に対して通知を行うための第2の出力部としての音声出力部37、及び通信端末として機能する送受信部としての通信部38を備え、前記ナビゲーション処理部17に、GPSセンサ15、データ記録部16、操作部34、表示部35、音声入力部36、音声出力部37及び通信部38が接続される。また、前記ナビゲーション処理部17には、車速を検出する車速検出部としての車速センサ44が接続される。
【0012】
なお、本実施の形態においては、GPSセンサ15によって自車方位を検出するようになっているが、自車方位を検出するために方位検出部としての方位センサを独立させて配設することができる。また、前記GPSセンサ15は、併せて時刻を検出する。
【0013】
前記データ記録部16には、地図データが記録され、該地図データには、交差点(分岐点を含む。)に関する交差点データ、各交差点間を結ぶ道路に関する道路データ、道路の端点(始点及び終点)を表すノードに関するノードデータ、探索用に加工された探索データ、施設に関する施設データ、所定の情報を音声出力部37によって出力するためのデータ、統計データ、走行履歴データ等が記録される。
【0014】
そして、前記交差点データとして、交差点の名称、交差点の座標(緯度及び経度)、交差点の形状、交差点に隣接する主要な施設、交差点の先の主要な地名、連続交差点における交差点間距離等を表すデータが記録される。また、前記交差点データとして、車両の走行が制約される交差点、例えば、立体交差点、一方通行出口の交差点、中央分離帯がある交差点等のように、右折又は左折が制約される交差点については、制約の内容を表すデータが記録される。
【0015】
さらに、交差点データとして、交差点に進入する道路、すなわち、進入道路の方位を表す進入角度、交差点から退出する道路、すなわち、退出道路の方位を表す退出角度等が記録される。
【0016】
また、前記道路データとして、前記道路の始点から終点までの道路リンクを表す道路リンクデータ、及び道路リンク上において、道路形状を表すために道路に沿って設定された複数の設定点としての形状補間点のデータ(以下「補間点データ」という。)が記録される。補間点データには、各形状補間点の番号、座標、方位角(セグメント角度)等が含まれる。該方位角は、当該形状補間点と一つ前側の形状補間点とを結ぶセグメントを前方セグメントとし、当該形状補間点と一つ後側の形状補間点とを結ぶセグメントを後方セグメントとしたときの、前方セグメントに対する後方セグメントの成す角度をいう。
【0017】
そして、前記道路データとして、道路自体に関して、幅員、勾(こう)配、カント、バンク、路面の状態、道路の車線数、車線数の減少する箇所、幅員の狭くなる箇所、踏切り等を表すデータが、コーナに関して、曲率半径、交差点、T字路、コーナの入口及び出口等を表すデータが、道路属性に関して、降坂路、登坂路等を表すデータが、道路種別に関して、国道、県道、細街路等の一般道のほか、高速道路、都市高速道路、有料道路等の高速・有料道を表すデータがそれぞれ記録される。さらに、高速・有料道に関して、入口及び出口の取付道(ランプウェイ)、料金所等を表すデータが記録される。
【0018】
さらに、前記道路データとして、道路上において、所定の方向に向けた走行、本実施の形態においては、目的地の方向に向けた走行が制約される区間が走行制約区間として記録される。
【0019】
該走行制約区間には、少なくとも第1の所定距離、例えば、500〔m〕にわたって、右折及び左折のうちの少なくとも一方の走行が制約される区間が含まれる。したがって、前記走行制約区間には、右折及び左折のいずれも可能な、すなわち、進行方向の変更が可能な交差点がない区間が含まれる。そして、前記走行制約区間が連続する道路、例えば、高架道路、バイパス道路等が走行制約道路として記録される。
【0020】
さらに、前記走行制約区間には、少なくとも第2の所定距離、例えば、300〔m〕にわたって進行方向の変更が可能な交差点がなく、かつ、大きくカーブしている区間も含まれる。前記区間の開始点となる形状補間点から終了点の一つ前の形状補間点までの各形状補間点の方位角を加算することによって得られる角度(以下「道路偏向角度」という。)が所定の閾(しきい)値、本実施の形態においては、45〔°〕以上であるかどうかが判断され、道路偏向角度が45〔°〕以上である場合、前記区間は走行制約区間とされる。
【0021】
すなわち、形状補間点で表される第1の地点から形状補間点で表される第2の地点までの距離が300〔m〕以上であるときの、前記第1の地点の前方セグメント、すなわち、第1の地点の直前の道路に対して、前記第2の地点の前方セグメント、すなわち、第2の地点の直前の道路の成す角度は、前記道路偏向角度になる。そして、第1の地点が所定の交差点であり、第2の地点が次の交差点である場合、所定の交差点と次の交差点との間の距離が300〔m〕以上であるときの、前記所定の交差点への進入道路に対して次の交差点への進入道路の成す角度は、前記道路偏向角度になる。
【0022】
なお、走行制約区間を表すデータとしては、走行制約区間の開始点となるノード、走行制約区間の終了点となるノード、走行制約区間の距離等が記録され、走行制約道路を表すデータとしては、走行制約道路の開始点となるノード、走行制約道路の終了点となるノード、走行制約道路の距離等が記録される。
【0023】
前記データ記録部16は、前記各種のデータを記録するための、ハードディスク、CD、DVD、光ディスク等の図示されないディスクのほかに、各種のデータを読み出したり、書き込んだりするための読出・書込ヘッド等の図示されないヘッドを備える。なお、前記データ記録部16にメモリカード等を使用することができる。
【0024】
また、前記ナビゲーション処理部17は、ナビゲーション装置14の全体の制御を行う制御装置としての、かつ、演算装置としてのCPU31、該CPU31が各種の演算処理を行うに当たってワーキングメモリとして使用されるRAM32、制御用のプログラムのほかに、目的地までの経路の探索、探索経路の案内、すなわち、経路案内等を行うための各種のプログラムが記録されたROM33、各種のデータ、プログラム等を記録するために使用される図示されないフラッシュメモリ等を備える。
【0025】
前記操作部34は、運転者が操作することによってナビゲーション装置14において各種の機能を実現させるためのものであり、ナビゲーション装置14とは独立させて配設されたリモコン、キーボード、マウス等のほかに、ナビゲーション装置14の筐(きょう)体等に操作要素として配設されたスイッチ、ボタン、キー、ダイヤル等から成る。また、前記表示部35としてはディスプレイが使用される。本実施の形態においては、操作部34及び表示部35として、操作部の機能を併せて有するタッチパネルを使用することができ、該タッチパネルにおいては、画面に画像による操作要素としてキー、スイッチ、ボタン等が表示され、キー、スイッチ、ボタン等をタッチすることによって、所定の入力操作を行うことができる。
【0026】
また、音声入力部36は、図示されないマイクロホン等によって構成され、音声によって必要な情報を入力することができる。さらに、音声出力部37は、図示されない音声合成装置及びスピーカを備え、音声出力部37から各種の情報が音声で出力される。
【0027】
前記通信部38は、情報提供者としてのVICS(登録商標)センタ等の図示されない道路交通情報センタ等から送られた交通情報、一般情報等の各種の情報を、道路に沿って配設された電波ビーコン装置、光ビーコン装置等を介して電波ビーコン、光ビーコン等として受信するためのビーコンレシーバ、ラジオ局を介してラジオ放送、例えば、FM多重放送を受信するためのラジオ受信機等を備える。なお、前記交通情報には、渋滞情報、規制情報、駐車場情報、交通事故情報、サービスエリアの混雑状況情報等が含まれ、一般情報には、ニュース、天気予報等が含まれる。なお、前記通信部38は、前記情報センタ51から交通情報、一般情報等の各種の情報を受信することもできる。そのために、前記情報センタ51は、サーバ53、該サーバ53に接続された通信部57及び情報記録部としてのデータベース(DB)58を備え、前記サーバ53は、制御装置としての、かつ、演算装置としてのCPU54、RAM55、ROM56等を備える。また、前記データベース58に、前記データ記録部16に記録された各種のデータと同様のデータが記録される。さらに、情報センタ51は、複数の車両(自車又は他車)から収集した走行履歴データをリアルタイムに提供することができる。
【0028】
なお、前記ナビゲーションシステム、ナビゲーション処理部17、CPU31、54、サーバ53等は、各種のプログラム、データ等に基づいてコンピュータとして機能する。また、データ記録部16、RAM32、55、ROM33、56、データベース58、フラッシュメモリ等によって記憶装置又は記録媒体が構成される。そして、演算装置として、CPU31、54に代えてMPU等を使用することもできる。
【0029】
次に、前記構成のナビゲーションシステムの基本動作について説明する。
【0030】
まず、運転者によって操作部34が操作され、ナビゲーション装置14が起動されると、CPU31の図示されない初期化処理手段は、初期化処理を行い、GPSセンサ15によって検出された自車位置及び自車方位を読み込むとともに、各種のデータを初期化する。なお、前記CPU31の図示されないマッチング処理手段は、マッチング処理を行い、読み込まれた自車位置の軌跡、及び自車位置の周辺の道路を構成する各道路リンクの形状、配列等に基づいて、自車位置がいずれの道路リンク上に位置するかの判定を行うことによって、自車位置を特定する。
【0031】
続いて、CPU31の図示されない基本情報取得処理手段は、基本情報取得処理を行い、前記地図データを、データ記録部16から読み出して取得するか、又は通信部38を介して情報センタ51等から受信して取得する。
【0032】
そして、前記CPU31の図示されない表示処理手段は、表示処理を行い、前記表示部35に地図画面を形成し、該地図画面に自車位置、自車位置の周辺の地図及び自車方位を表示する。したがって、運転者は、前記自車位置、自車位置の周辺の地図及び自車方位に従って車両を走行させることができる。
【0033】
また、運転者が操作部34を操作して所定の地点を目的地として入力すると、CPU31の図示されない目的地設定処理手段は、目的地設定処理を行い、目的地を設定する。なお、必要に応じて出発地を入力し、設定することもできる。また、あらかじめ所定の地点を登録地点として登録しておき、登録地点を目的地として設定することができる。
【0034】
続いて、運転者が操作部34を操作して探索条件を入力すると、CPU31の図示されない経路探索処理手段は、経路探索処理を行い、前記自車位置、目的地、探索条件等を読み込むとともに、データ記録部16から探索データ等を読み出し、自車位置、目的地及び探索データに基づいて、自車位置で表される出発地から目的地までの経路を前記探索条件で探索し、探索経路を表す経路データを出力する。この場合、各道路リンクごとに付与されたリンクコストの合計が最も小さい経路が探索経路とされる。
【0035】
そして、前記CPU31の図示されない案内処理手段は、案内処理を行い、経路案内を行う。そのために、前記案内処理手段の経路表示処理手段は、経路表示処理を行い、前記経路データを読み込み、該経路データに従って前記地図画面に探索経路を表示する。この場合、必要に応じて、前記案内処理手段の音声出力処理手段は、音声出力処理を行い、音声出力部37から探索経路を音声で出力して経路案内を行う。
【0036】
また、前記表示処理手段は、通信部38を介して交通情報を受信すると、交通情報を交通状況指標としての渋滞帯に変換し、該渋滞帯を前記地図画面上の道路に沿って表示する。この場合、前記渋滞帯は、渋滞の始点から終点まで延在させて表示され、かつ、渋滞の度合いに応じて赤、橙(だいだい)、緑等の色で表示される。このようにして、運転者は、車両を走行させる予定の経路、探索経路等における道路の渋滞状況を知ることができる。
【0037】
ところで、前記経路案内においては、所定の交差点で探索経路の案内をする必要がある場合、前記交差点が案内交差点として設定される。そのために、前記案内処理手段の案内交差点設定処理手段は、案内交差点設定処理を行い、経路データに従って、すなわち、前記探索経路に基づいて、車両を左折、右折又は直進させる必要がある交差点があるかどうかを判断し、車両を左折、右折又は直進させる必要がある交差点がある場合、該交差点を案内交差点として設定する。
【0038】
続いて、前記案内処理手段の案内点拡大図形成処理手段は、案内点拡大図形成処理を行い、車両が案内交差点に到達する前に、地図画面の所定の領域に案内交差点の拡大図、すなわち、案内点拡大図としての交差点拡大図を形成し、交差点拡大図による経路案内を行う。そのために、探索経路上の前記案内交差点より手前(自車位置側)の、設定された距離だけ離れた箇所に、案内点拡大図表示地点が設定され、車両が案内点拡大図表示地点に到達すると、前記交差点拡大図が表示される。
【0039】
この場合、該交差点拡大図に、案内交差点の周辺の地図、探索経路、案内交差点において目印になる施設等の陸標が表示される。なお、高速道路、都市高速道路、有料道路等の自動車専用の有料道において、ジャンクション等と合流したり分岐したりする交差点も案内交差点として設定される。
【0040】
そして、前記案内処理手段の経路案内地点設定処理手段は、経路案内地点設定処理を行い、探索経路上の前記案内交差点より手前の、各設定された距離だけ離れた箇所に、一つ以上、本実施の形態においては、複数の経路案内地点を設定し、各経路案内地点に車両が到達すると、前記音声出力処理手段は、案内交差点について、経路案内地点ごとにあらかじめ設定された内容の経路案内を音声出力部37からの音声、すなわち、案内フレーズで出力する。
【0041】
ところで、目的地の方角だけが分かっている場合に、運転者が目的地を入力することなく、地図画面を見て、標識、建物等を目安にして、目的地の情報を模索しながら目的地まで車両を走行させることがある。
【0042】
その場合、目的地の周辺で、目的地が車両を走行させている道路より右方又は左方にあることが分かると、自車位置より前方における所定の交差点で車両を右折又は左折させることになるが、車両を走行させている道路が、高架道路、バイパス道路等の走行制約道路である場合、そのまま走行制約道路に沿って車両を走行させると、前記所定の交差点で右折又は左折をすることができず、目的地に到達するのに非常に遠回りをしなければならなかったり、運転者がストレスを感じたりしてしまう。したがって、車両を目的地まで円滑に走行させることができない。
【0043】
そこで、本実施の形態においては、CPU31の図示されない走行制約情報通知処理手段によって、走行制約情報通知処理を行い、自車位置の周辺の走行制約道路における走行上の制約の情報、すなわち、走行制約情報を運転者に通知するようにしている。
【0044】
図2は本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示すフローチャート、図3は本発明の第1の実施の形態における自車位置の周辺を表す図、図4は本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第1の図、図5は本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第2の図、図6は本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第3の図、図7は本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第4の図である。
【0045】
図において、prは自車位置、ri(i=1、2、…)は道路、crj(j=1、2、…)は交差点、km(m=1、2、…)は地図画面上に形成された操作要素としてのキー、cuは地図画面上の操作箇所を表すカーソルである。
【0046】
この場合、各道路riのうちの道路r1は走行制約道路、前記道路r1上の交差点cr2〜cr4の区間は、2〔km〕にわたって右折が制約される走行制約区間である。また、道路r1と道路r2〜r5とは、交差点cr1〜cr4で交差し、道路r6と道路r2、r3、r5とは交差点cr5〜cr7で交差する。
【0047】
また、キーk1は、地図画面に詳細地図を表示するための詳細キー、キーk2は、地図画面に広域地図を表示するための広域キー、キーk3は地図画面上において走行制約情報が通知されるのを要求するための制約通知要求キー、キーk5は通知される走行制約情報を特定し、左折が制約される走行制約区間の走行制約情報を指定するための左折キー、キーk6は通知される走行制約情報を特定し、右折及び左折が制約される走行制約区間の走行制約情報を指定するための右左折キー、キーk7は通知される走行制約情報を特定し、右折が制約される走行制約区間を指定するための右折キー、キーk8は走行制約情報の通知の解除を要求するための通知解除要求キーである。なお、前記キーk5は、車両を走行させている道路より左方に目的地がある場合に、前記キーk6は、車両を走行させている道路の左方又は右方の近傍に目的地がある場合に、前記キーk7は、車両を走行させている道路より右方に目的地がある場合に押下するために表示される。
【0048】
この場合、運転者が目的地の情報を模索しながら車両を走行させているときに、走行制約情報通知処理手段の操作判断処理手段は、操作判断処理を行い、運転者によってキーk3が押下されるのを待機する。
【0049】
そして、車両が目的地の周辺に到達し、目的地が車両を走行させている道路より右方にあることが分かり、図4に示されるように、運転者がキーk3を押下し、走行制約情報が通知されるのを要求すると、走行制約情報通知処理手段のモード切換処理手段は、モード切換処理を行い、走行が制約されない道路に沿って車両を走行させる標準モードから、走行制約情報を運転者に通知する走行制約情報通知モードにモードを切り換える。
【0050】
続いて、前記走行制約情報通知処理手段の走行制約情報設定処理手段は、走行制約情報設定処理を行い、図5に示されるように、地図画面上にキーk5〜k7を表示し、運転者に走行制約情報を特定するように促す。これに対して、運転者が、車両を走行させている道路からみて、目的地が左方にあるか、左方又は右方の近傍にあるか、又は右方にあるかを判断し、キーk5〜7を押下する。そして、例えば、運転者がキーk7を押下し、走行制約情報を特定し、右折が制約される走行制約区間の走行制約情報を指定すると、前記走行制約情報通知処理手段の走行制約区間判定処理手段は、走行制約区間判定処理を行い、自車位置prを読み込み、道路データを参照し、自車位置prより前方に、本実施の形態においては、自車位置prより前方における周辺、例えば、自車位置prを中心とする所定の半径内の領域に走行制約区間があるかどうかを判断し、走行制約区間がある場合に、前記走行制約情報通知処理手段の走行制約情報取得処理手段は、走行制約情報取得処理を行い、右折が制約される走行制約区間の走行制約情報を読み出す。また、高架道路、バイパス道路等の走行制約道路以外の、車両が走行している道路において、所定の区間が、右折が制約される場合には、前記区間の情報を走行制約区間の走行制約情報として読み出すことができる。
【0051】
さらに、前記走行制約区間判定処理手段は、自車位置prを読み込み、交差点データ及び道路データを参照し、車両が走行している道路上の各交差点において、車両の右折が制約されるかどうかを判断し、自車位置prより前方の所定の区間、例えば、交差点cr2、cr4間のように、設定された距離、本実施の形態においては、500〔m〕以上にわたって各交差点において車両の右折が制約される場合、前記所定の区間を、走行制約区間とすることができる。
【0052】
続いて、前記走行制約情報通知処理手段の第1の通知処理手段としての走行制約区間表示処理手段は、第1の通知処理としての走行制約区間表示処理を行い、図6に示されるように、走行制約区間を強調表示することによって、運転者に走行制約情報を通知する。前記強調表示は、道路の色を変更したり、道路を点滅させたりすることによって行われる。
【0053】
次に、前記走行制約情報通知処理手段の走行道路判断処理手段は、走行道路判断処理を行い、車両が走行制約道路上を走行しているかどうかを判断する。車両が走行制約道路上を走行している場合、前記走行制約情報通知処理手段の最終交差点設定処理手段は、最終交差点設定処理を行い、走行が制約されない道路における最終の交差点、すなわち、最終交差点を設定する。なお、本実施の形態において、最終交差点は、走行制約区間が開始される交差点でもある。
【0054】
そして、前記走行制約情報通知処理手段の最終交差点予告地点設定処理手段は、最終交差点予告地点設定処理を行い、最終交差点より手前(自車位置側)の、設定された距離だけ離れた箇所に、最終交差点予告地点を設定する。そして、車両が最終交差点予告地点に到達すると、前記走行制約情報通知処理手段の第2の通知処理手段としての音声出力処理手段は、第2の通知処理としての音声出力処理を行い、最終交差点について、図7に示されるように、あらかじめ設定された内容の経路案内を音声出力部37からの音声、すなわち、「この交差点を通りすぎると、以降2〔km〕右折できません。」等の案内フレーズで出力することによって、運転者に、走行制約区間を回避するように走行制約情報を通知する。
【0055】
このように、運転者に走行制約区間についての経路案内が音声出力部37からの案内フレーズで出力される。なお、前記走行制約区間を、距離でレベル分けし、レベルごとに案内フレーズを異ならせることができる。
【0056】
続いて、前記操作判断処理手段は、運転者によってキーk3が再度押下されるのを待機する。
【0057】
このように、本実施の形態においては、自車位置prの周辺に走行制約区間がある場合、地図画面上で走行制約区間が強調表示されるので、運転者は、走行制約区間を使用することなく、車両を走行させることができる。
【0058】
また、車両を走行制約道路上で走行させているときに、走行制約区間において走行が制約される旨の通知が運転者にされるので、目的地に到達するのに非常に遠回りをしなければならなかったり、運転者がストレスを感じたりしてしまうことがなく、目的地まで車両を円滑に走行させることができる。
【0059】
次に、フローチャートについて説明する。
ステップS1 制約通知要求キーが押下されるのを待機し、制約通知要求キーが押下された場合はステップS2に進む。
ステップS2 モード切換処理を行う。
ステップS3 走行制約情報設定処理を行う。
ステップS4 走行制約区間を強調表示する。
ステップS5 走行制約道路上を走行しているかどうかを判断する。走行制約道路上を走行している場合はステップS6に進み、走行制約道路上を走行していない場合はステップS4に戻る。
ステップS6 最終交差点予告地点に到達したかどうかを判断する。最終交差点予告地点到達した場合はステップS7に進み、到達していない場合はステップS4に戻る。
ステップS7 音声案内で運転者に通知する。
ステップS8 制約通知要求キーが再度押下されたかどうかを判断する。制約通知要求キーが再度押下された場合はステップS4に戻り、押下されなかった場合は処理を終了する。
【0060】
ところで、目的地に向けて車両を走行させているときに、運転者は車両を目的地の方向に向けて走行させることになるが、自車位置より前方において目的地の方向と異なる方向に道路がカーブ(湾曲)することがある。その場合、カーブした先の交差点で車両を右折又は左折させて再び車両を目的地の方向に向けて走行させることになるが、それに伴って、運転者が方向感覚を失ったり、目的地に到達するのに非常に遠回りをしなければならなかったり、運転者がストレスを感じたりして、車両を目的地まで円滑に走行させることができなくなってしまう。
【0061】
そこで、自車位置より前方において道路がカーブする場合に、その旨を運転者に通知することができるようにした本発明の第2の実施の形態について説明する。なお、第1の実施の形態と同じ構造を有するものについては、同じ符号を付与し、同じ構造を有することによる発明の効果については同実施の形態の効果を援用する。
【0062】
図8は本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示すフローチャート、図9は本発明の第2の実施の形態における自車位置の周辺を表す図、図10は本発明の第2の実施の形態における交差点における進入角度の説明図、図11は本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示す第1の図、図12は本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示す第2の図、図13は本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示す第3の図である。
【0063】
図において、prは自車位置、ri’(i’=11、12、…)は道路、crj’(j’=11、12、…)は交差点、km’(m’=11、12、…)は地図画面上に形成された操作要素としてのキー、cuは地図画面上の操作箇所を表すカーソルである。前記道路r11と道路r12〜r14とは、交差点cr11〜cr13で交差する。
【0064】
この場合、図10に示されるように、前記道路r11上の、交差点cr12の進入道路をraとし、交差点cr12より一つ先の交差点cr13の進入道路をrbとしたとき、進入道路ra、rbが成す角度を道路湾曲角度θで表すことができ、道路データを作成するにあたり道路湾曲角度θが45〔°〕以上であるかどうかがあらかじめ判断され、道路湾曲角度θが45〔°〕以上である場合、交差点cr12、cr13の区間は、車両の走行が制約される走行制約区間とされ、情報記録部としてのデータ記録部16に記録される。なお、図9においては、道路r1が左方にカーブしているが、道路r1が右方にカーブしていても、走行制約区間とされる。
【0065】
また、キーk11は、地図画面に詳細地図を表示するための詳細キー、キーk12は、地図画面に広域地図を表示するための広域キー、キーk13は地図画面上において走行制約情報が通知されるのを要求するための制約通知要求キー、キーk14は走行制約情報の通知の解除を要求するための通知解除要求キーである。
【0066】
この場合、運転者が目的地の情報を模索しながら車両を所定の方向、本実施の形態においては、目的地の方向に向けて走行させているときに、前記走行制約情報通知処理手段の操作判断処理手段は、運転者によってキーk13が押下されるのを待機する。
【0067】
そして、図11に示されるように、運転者がキーk13を押下し、走行制約情報が通知されるのを要求すると、前記モード切換処理手段は、走行が制約されない道路に沿って車両を走行させる標準モードから、走行制約情報を運転者に通知する走行制約情報通知モードにモードを切り換える。
【0068】
続いて、前記走行制約区間判定処理手段は、自車位置prを読み込み、道路データを参照し、自車位置prより前方に、本実施の形態においては、自車位置prより前方における周辺、例えば、自車位置prを中心とする所定の半径内の領域に走行制約区間があるかどうかを判断し、走行制約区間がある場合に、前記走行制約情報取得処理手段は、走行制約区間の走行制約情報を読み出す。
【0069】
さらに、前記走行制約区間判定処理手段は、自車位置prを読み込み、交差点データ及び道路データを参照し、車両が走行している道路上における所定の区間において、少なくとも第2の所定距離、例えば、300〔m〕にわたって進行方向の変更が可能な交差点がなく、かつ、前記区間が大きくカーブしているかどうかを判断し、300〔m〕にわたって進行方向の変更が可能な交差点がなく、かつ、前記区間が大きくカーブしている場合に、前記所定の区間を走行制約区間とする。
【0070】
そして、前記走行制約区間表示処理手段は、図12に示されるように、走行制約区間(道路r11上の交差点cr12から交差点cr13までの区間)を強調表示することによって、運転者に走行制約情報を通知する。前記強調表示は、道路の色を変更したり、道路を点滅させたりすることによって行われる。
【0071】
次に、前記最終交差点設定処理手段は、走行が制約されない道路における最終の交差点、すなわち、最終交差点(交差点cr12)を設定する。なお、本実施の形態において、最終交差点は、走行制約区間が開始される交差点でもある。
【0072】
そして、前記最終交差点予告地点設定処理手段は、最終交差点より手前(自車位置側)の、設定された距離だけ離れた箇所に、最終交差点予告地点を設定する。そして、車両が最終交差点予告地点に到達すると、前記音声出力処理手段は、最終交差点について、図13に示されるように、あらかじめ設定された内容の経路案内を第2の出力部としての音声出力部37からの音声、すなわち、「この交差点を通りすぎると、次の交差点では45〔°〕左に進行方向が変わります。」等の案内フレーズで出力することによって、運転者に、走行制約区間を回避するように走行制約情報を通知する。
【0073】
このように、運転者に走行制約区間についての経路案内が音声出力部37からの案内フレーズで出力される。なお、前記走行制約区間を、距離でレベル分けし、レベルごとに案内フレーズを異ならせることができる。
【0074】
続いて、前記操作判断処理手段は、運転者によってキーk13が再度押下されるのを待機する。
【0075】
このように、本実施の形態においては、自車位置prの周辺に走行制約区間がある場合、地図画面上で走行制約区間が強調表示されるので、運転者は、走行制約区間を使用することなく、車両を走行させることができる。
【0076】
また、車両を走行させているときに、自車位置prの前方に走行制約区間がある場合、走行制約区間における走行制約情報が案内フレーズで運転者に通知されるので、運転者が方向感覚を失ったり、目的地に到達するのに非常に遠回りをしなければならなかったり、運転者がストレスを感じたりしてしまうことがなく、目的地まで車両を円滑に走行させることができる。
【0077】
次に、フローチャートについて説明する。
ステップS11 制約通知要求キーが押下されるのを待機し、制約通知要求キーが押下された場合はステップS12に進む。
ステップS12 モード切換処理を行う。
ステップS13 走行制約区間を強調表示する。
ステップS14 最終交差点予告地点に到達したかどうかを判断する。最終交差点予告地点に到達した場合はステップS15に進み、到達していない場合はステップS13に戻る。
ステップS15 音声案内で運転者に通知する。
ステップS16 制約通知要求キーが再度押下されたかどうかを判断する。制約通知要求キーが再度押下された場合はステップS13に戻り、再度押下されなかった場合は処理を終了する。
【0078】
本実施の形態においては、少なくとも第2の所定距離、例えば、300〔m〕にわたって進行方向の変更が可能な交差点がなく、かつ、大きくカーブしている区間が走行制約区間に含まれるようになっているが、少なくとも第2の所定距離、例えば、300〔m〕にわたって右折することができる交差点がなく、かつ、大きく左方にカーブしている区間、及び少なくとも第1の所定距離、例えば、500〔m〕にわたって左折することができる交差点がなく、かつ、大きく右方にカーブしている区間を走行制約区間に含むことができる。
【0079】
また、本実施の形態においては、走行制約区間の走行制約情報を指定することができないようになっているが、第1の実施の形態と同様に、走行制約区間の走行制約情報を指定し、大きく左方にカーブしている走行制約区間の走行制約情報を指定したり、大きく右方にカーブしている走行制約区間の走行制約情報を指定したりすることができる。その場合、地図画面に走行制約情報を指定するための左方カーブキー、右方カーブキー等が表示される。
【0080】
また、第1の実施の形態においては、少なくとも第1の所定距離、例えば、500〔m〕以上にわたって左折又は右折が制約される区間が走行制約区間とされ、第2の実施の形態においては、少なくとも第2の所定距離、例えば、300〔m〕以上にわたって進行方向の変更が可能な交差点がなく、かつ、大きくカーブしている区間が走行制約区間にされるが、第1、第2の実施の形態を組み合わせ、少なくとも第1の所定距離、例えば、500〔m〕以上にわたり、左折又は右折が制約される区間、若しくは、少なくとも第2の所定距離、例えば、300〔m〕以上にわたって進行方向の変更が可能な交差点がなく、かつ、大きくカーブしている区間を走行制約区間とすることができる。そして、少なくとも第2の所定距離、例えば、300〔m〕以上にわたって進行方向の変更が可能な交差点がなく、かつ、その先が行き止まりである区間を走行制約区間とすることもできる。
【0081】
さらに、距離に関係なく左折又は右折が制約される区間、若しくは、少なくとも第2の所定距離、例えば、300〔m〕以上にわたって進行方向の変更が可能な交差点がなく、かつ、大きくカーブしている区間を走行制約区間とすることすることができる。
【0082】
なお、本発明は前記各実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【図面の簡単な説明】
【0083】
【図1】本発明の第1の実施の形態におけるナビゲーションシステムを示すブロック図である。
【図2】本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示すフローチャートである。
【図3】本発明の第1の実施の形態における自車位置の周辺を表す図である。
【図4】本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第1の図である。
【図5】本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第2の図である。
【図6】本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第3の図である。
【図7】本発明の第1の実施の形態における走行制約情報通知処理手段の動作を示す第4の図である。
【図8】本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示すフローチャートである。
【図9】本発明の第2の実施の形態における自車位置の周辺を表す図である。
【図10】本発明の第2の実施の形態における交差点における進入角度の説明図である。
【図11】本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示す第1の図である。
【図12】本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示す第2の図である。
【図13】本発明の第2の実施の形態における走行制約情報通知処理手段の動作を示す第3の図である。
【符号の説明】
【0084】
14 ナビゲーション装置
15 GPSセンサ
31 CPU
51 情報センタ
63 ネットワーク
pr 自車位置
【特許請求の範囲】
【請求項1】
自車位置を検出する現在地検出部と、地図データを取得する基本情報取得処理手段と、前記地図データを参照し、自車位置より前方に、所定の方向に向けた走行が制約される走行制約区間があるかどうかを判断する走行制約区間判定処理手段と、走行制約区間がある場合に、走行制約区間の走行制約情報を操作者に通知する通知処理手段とを有することを特徴とする道路走行情報通知システム。
【請求項2】
前記走行制約区間判定処理手段は、自車位置より前方に、少なくとも所定距離にわたって進行方向の変更が可能な交差点がない場合に、走行制約区間があると判断する請求項1に記載の道路走行情報通知システム。
【請求項3】
前記走行制約区間判定処理手段は、自車位置より前方に、少なくとも所定距離にわたって進行方向の変更が可能な交差点がなく、かつ、前記所定距離内の道路において第1の地点の直前の道路に対して第2の地点の直前の道路の成す角度が閾値以上である場合に、走行制約区間があると判断する請求項1に記載の道路走行情報通知システム。
【請求項4】
前記第1の地点は所定の交差点であり、前記第2の地点は前記所定の交差点の次の交差点であり、前記走行制約区間判定処理手段は、所定の交差点の進入道路に対して次の交差点の進入道路の成す角度が閾値以上である場合に、走行制約区間があると判断する請求項3に記載の道路走行情報通知システム。
【請求項5】
自車位置を検出する現在地検出部と、地図データを取得する基本情報取得処理手段と、前記地図データを参照し、自車位置より前方に、所定の方向に向けた走行が制約される走行制約区間があるかどうかを判断する走行制約区間判定処理手段と、走行制約区間がある場合に、走行制約区間の走行制約情報を操作者に通知する通知処理手段とを有するとともに、前記走行制約区間判定処理手段は、自車位置より前方に、第1の所定距離にわたって進行方向の変更が可能な交差点がない場合、又は前記第1の所定距離より短い第2の所定距離にわたって進行方向の変更が可能な交差点がなく、かつ、前記第2の所定距離内の道路における該道路の角度の変化が閾値以上である場合に、走行制約区間があると判断することを特徴とする道路走行情報通知システム。
【請求項6】
前記通知処理手段は、前記走行制約区間を強調表示する請求項1〜5のいずれか1項に記載の道路走行情報通知システム。
【請求項7】
前記通知処理手段は、走行制約区間の開始点となる交差点より手前に設定された最終交差点予告地点に到達すると、走行制約情報を操作者に通知する請求項1〜5のいずれか1項に記載の道路走行情報通知システム。
【請求項8】
自車位置を検出し、地図データを取得し、該地図データを参照し、自車位置より前方に、所定の方向に向けた走行が制約される走行制約区間があるかどうかを判断し、走行制約区間がある場合に、走行制約区間の走行制約情報を操作者に通知することを特徴とする道路走行情報通知方法。
【請求項9】
コンピュータを、地図データを取得する基本情報取得処理手段、前記地図データを参照し、現在地検出部によって検出された自車位置より前方に、所定の方向に向けた走行が制約される走行制約区間があるかどうかを判断する走行制約区間判定処理手段、及び走行制約区間がある場合に、走行制約区間の走行制約情報を操作者に通知する通知処理手段として機能させることを特徴とするプログラム。
【請求項1】
自車位置を検出する現在地検出部と、地図データを取得する基本情報取得処理手段と、前記地図データを参照し、自車位置より前方に、所定の方向に向けた走行が制約される走行制約区間があるかどうかを判断する走行制約区間判定処理手段と、走行制約区間がある場合に、走行制約区間の走行制約情報を操作者に通知する通知処理手段とを有することを特徴とする道路走行情報通知システム。
【請求項2】
前記走行制約区間判定処理手段は、自車位置より前方に、少なくとも所定距離にわたって進行方向の変更が可能な交差点がない場合に、走行制約区間があると判断する請求項1に記載の道路走行情報通知システム。
【請求項3】
前記走行制約区間判定処理手段は、自車位置より前方に、少なくとも所定距離にわたって進行方向の変更が可能な交差点がなく、かつ、前記所定距離内の道路において第1の地点の直前の道路に対して第2の地点の直前の道路の成す角度が閾値以上である場合に、走行制約区間があると判断する請求項1に記載の道路走行情報通知システム。
【請求項4】
前記第1の地点は所定の交差点であり、前記第2の地点は前記所定の交差点の次の交差点であり、前記走行制約区間判定処理手段は、所定の交差点の進入道路に対して次の交差点の進入道路の成す角度が閾値以上である場合に、走行制約区間があると判断する請求項3に記載の道路走行情報通知システム。
【請求項5】
自車位置を検出する現在地検出部と、地図データを取得する基本情報取得処理手段と、前記地図データを参照し、自車位置より前方に、所定の方向に向けた走行が制約される走行制約区間があるかどうかを判断する走行制約区間判定処理手段と、走行制約区間がある場合に、走行制約区間の走行制約情報を操作者に通知する通知処理手段とを有するとともに、前記走行制約区間判定処理手段は、自車位置より前方に、第1の所定距離にわたって進行方向の変更が可能な交差点がない場合、又は前記第1の所定距離より短い第2の所定距離にわたって進行方向の変更が可能な交差点がなく、かつ、前記第2の所定距離内の道路における該道路の角度の変化が閾値以上である場合に、走行制約区間があると判断することを特徴とする道路走行情報通知システム。
【請求項6】
前記通知処理手段は、前記走行制約区間を強調表示する請求項1〜5のいずれか1項に記載の道路走行情報通知システム。
【請求項7】
前記通知処理手段は、走行制約区間の開始点となる交差点より手前に設定された最終交差点予告地点に到達すると、走行制約情報を操作者に通知する請求項1〜5のいずれか1項に記載の道路走行情報通知システム。
【請求項8】
自車位置を検出し、地図データを取得し、該地図データを参照し、自車位置より前方に、所定の方向に向けた走行が制約される走行制約区間があるかどうかを判断し、走行制約区間がある場合に、走行制約区間の走行制約情報を操作者に通知することを特徴とする道路走行情報通知方法。
【請求項9】
コンピュータを、地図データを取得する基本情報取得処理手段、前記地図データを参照し、現在地検出部によって検出された自車位置より前方に、所定の方向に向けた走行が制約される走行制約区間があるかどうかを判断する走行制約区間判定処理手段、及び走行制約区間がある場合に、走行制約区間の走行制約情報を操作者に通知する通知処理手段として機能させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−48794(P2010−48794A)
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願番号】特願2008−332905(P2008−332905)
【出願日】平成20年12月26日(2008.12.26)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願日】平成20年12月26日(2008.12.26)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]