
遠心分離機
【課題】恒温槽やヒータ等の熱器具を要することなく、ロータを所望の温度に効率良く予熱することができる遠心分離機を提供すること。
【解決手段】試料を収容するロータ7と、該ロータ7を回転駆動するモータ4と、前記ロータ7を収容するロータ室3と、該ロータ室3の温度を検出する温度センサ12と、前記ロータ7の設定回転数と設定温度を入力するための操作パネル14を備えた遠心分離機1において、前記温度センサ12からフィードバックされる検出温度に基づいて前記ロータ7の温度が設定温度となるよう前記モータ4の回転数を制御する制御装置13を設ける。
【解決手段】試料を収容するロータ7と、該ロータ7を回転駆動するモータ4と、前記ロータ7を収容するロータ室3と、該ロータ室3の温度を検出する温度センサ12と、前記ロータ7の設定回転数と設定温度を入力するための操作パネル14を備えた遠心分離機1において、前記温度センサ12からフィードバックされる検出温度に基づいて前記ロータ7の温度が設定温度となるよう前記モータ4の回転数を制御する制御装置13を設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、試料を遠心分離する前にロータを所望の温度に予熱する方式を採用した遠心分離機に関するものである。
【背景技術】
【0002】
例えば家畜のBSE検査等を行う場合、検体試料が遠心分離機によって遠心分離されるが、この場合、検体試料を遠心分離する前にロータを所望の温度(例えば37℃)に予熱することが必要である。
【0003】
従来、遠心運転する前のロータ温度を所定の温度に予熱する方法には、予めロータを恒温槽等に入れてロータを所定の温度に保つ方法があるが、この方法では恒温槽等の特別な装置が必要であった。
【0004】
又、別の方法として、検体試料をセットする前に予備運転を行い、ロータを所定の温度に予熱する方法も知られている。この方法では、所望のロータ温度が室温よりも低い場合には、遠心分離機に備えた冷凍機を用いて温度制御を実行してロータを予冷する手法が採られていた。逆に、所望のロータ温度が室温よりも高い場合には、ロータ室の外周に巻き付けたエバポレータの周囲にヒータを設け、このヒータによる加熱に加えてロータを所定の回転数で回転させながら冷凍機のオン/オフ温度制御を実行する方法が採られていた。そして、このときの温度のオーバーシュート/アンダーシュートを小さくするため、ヒータをオン/オフ制御して熱容量が大きなエバポレータの温度変化を小さく抑え、ロータを所定の温度に制御する加温手法が採られていた(例えば、特許文献1参照)。
【特許文献1】特開平5−301059号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところが、上記後者の方法では、特にロータを加温する場合にロータを短時間で所定の温度に予熱するためにエバポレータの周囲にヒータを設ける必要があった。又、エバポレータの温度変化を小さく抑えるためにヒータのオン/オフ制御を実行していたため、複雑な温度制御となっていた。
【0006】
本発明は上記問題に鑑みてなされたもので、その目的とする処は、恒温槽やヒータ等の熱器具を要することなく、ロータを所望の温度に効率良く予熱することができる遠心分離機を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するため、請求項1記載の発明は、試料を収容するロータと、該ロータを回転駆動するモータと、前記ロータを収容するロータ室と、該ロータ室の温度を検出する温度センサと、前記ロータの設定回転数と設定温度を入力するための操作パネルを備えた遠心分離機において、前記温度センサからフィードバックされる検出温度に基づいて前記ロータの温度が設定温度となるよう前記モータの回転数を制御する制御装置を設けたことを特徴とする。
【0008】
請求項2記載の発明は、請求項1記載の発明において、前記制御装置は、前記モータを回転加速させて前記ロータを所定の回転数で制御する回転数制御工程と、前記ロータが所定の温度に達すると制御モードを切り替えるモード切替工程と、目標温度と検出温度との差を求める温度差算出工程と、求められた温度差から目標回転数を算出する目標回転数算出工程を経て前記ロータの温度が設定温度となるよう前記モータの回転数を制御することを特徴とする。
【発明の効果】
【0009】
本発明によれば、ロータを高速回転させることによって発生するロータ室内の空気との摩擦熱を利用してロータを加熱し、そのロータ室内の温度を温度センサにより検出し、その温度が所望の温度になるようにモータの回転数を制御するようにしたため、ロータを予熱するための恒温槽やヒータ等の熱器具を要することなく、ロータを所望の温度に効率良く予熱することができ、コスト及び省エネルギーの面で有利な遠心分離機を得ることができる。
【発明を実施するための最良の形態】
【0010】
以下に本発明の実施形態を添付図面に基づいて説明する。
【0011】
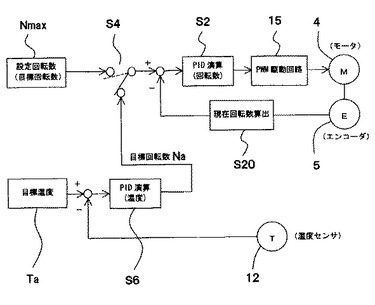
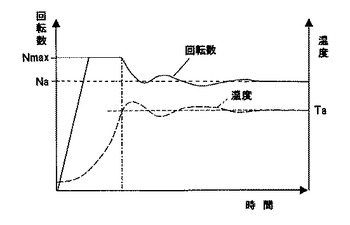
図1は本発明に係る遠心分離機の正断面図、図2は同遠心分離機のロータをモータ回転数制御によって温度制御する手順を示すフローチャート、図3は同ロータをモータ回転数制御によって温度制御する方法を示すブロック図、図4は同温度制御におけるロータ回転数とロータ温度の時間変化を示す図である。
【0012】
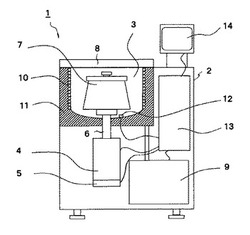
図1に遠心分離機1は、本体2内にロータ室3を備え、該ロータ室3の下方には駆動源であるモータ4と該モータ4の回数数を検出するためのエンコーダ5が設けられている。モータ4から上方へ延びる出力軸(モータ軸)6はロータ室3内に臨んでおり、その先端部にはロータ7が着脱可能に装着されている。又、ロータ室3の上面開口部はドア8によって開閉され、ロータ室3の外周には冷凍機9より配管されたエバポレータ10が巻装されており、その周囲は断熱材11で覆われている。更に、ロータ室3の底部には、該ロータ室3内の温度を検出するための温度センサ12が設けられている。
【0013】
又、遠心分離機本体2内の冷凍機9の上方には制御装置13が設けられ、本体2の上部には操作パネル14が設置されており、制御装置13には、前記モータ4、エンコーダ5、冷凍機9、温度センサ12及び操作パネル14が電気的に接続されている。
【0014】
而して、ロータ7内に収容された不図示の検体試料は、モータ4によってロータ7がロータ室3内で所定の速度で回転駆動されることによって遠心分離されるが、遠心分離に先立ちロータ7は回転数制御によって所定の温度(例えば、37℃)に予熱される。
【0015】
即ち、操作パネル14からロータ7の回転数と温度の設定値が入力されると、制御装置13は、入力された回転数と温度の設定値に基づきエンコーダ5によって検出された回転数信号のフィードバックを受けてモータ3の回転数制御を実行する。又、制御装置13は、ロータ7が収容されているロータ室3の底部に設けた前記温度センサ12からロータ室3の検出温度のフィードバックを受け、検体試料を遠心分離する際に該検体試料の温度が設定された温度になるよう冷凍機9をオン/オフ制御する。
【0016】
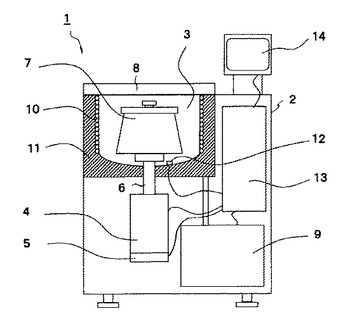
以下、本発明に係る遠心分離機1の温度制御方法を図2〜図4に基づいて具体的に説明する。尚、図2において、(a)は温度制御手順の全体の流れを示すフローチャート、(b)はモータの回転数制御を示すサブルーチンである。
【0017】
オペレータによって、検体試料が入っていない予熱すべきロータ7が予めセットされ、ロータ7の番号情報、予熱すべき目標温度Taを設定する。ロータ7の番号情報には、そのロータ7の許容最高回転数等が設定されており、オペレータによって予熱運転スタート操作がなされると(ステップS0)、制御装置13は、ロータ7の許容最高回転数である設定回転数Nmaxまでモータ4を回転加速させる(ステップS1、図4参照)。そして、制御装置6は、ロータ7の回転数が設定回転数Nmax付近になると、エンコーダ5からの検出信号をフィードバックする回転数制御を実行する(ステップS2:回転数制御工程)。
【0018】
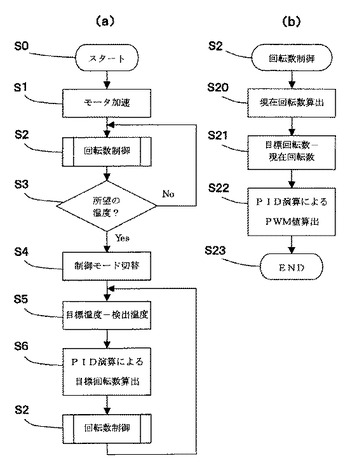
回転数制御工程(ステップS2)においては、先ずエンコーダ5の出力パルス信号から現在回転数Nを算出する(ステップS20)。この現在回転数Nの算出は、或る単位時間当りの移動パルス数から回転数を換算することによってなされる。そして、目標となる設定回転数Nmaxと現在回転数Nの差を求め(ステップS21)、その差の比例・積分・微分の項から成る所謂PID演算を行ってパルス・ワイド・モジュレーションと称されるPWM値を算出し(ステップS22)、演算を終了する(ステップS23)。ここで、PWM値は、モータ4に印加する電圧を図3に示すPWM駆動回路15によってコントロールする(パルスのデューティ比を変える)。この手法はモータ4の回転数を制御する一般的な手法であるため、これについての詳細な説明は省略する。
【0019】
而して、ロータ7は、高速で回転するためにロータ室3内の空気との摩擦で加熱され、該ロータ7とロータ室3及びエバポレータ10の温度は次第に上昇する。ロータ室3の底部に設けた温度センサ12の検出温度が所望の温度Ta(例えば37℃)に達したか否かが判断され(ステップS3)、所望の温度Taに未だ達していない場合(ステップS3での判断結果がNoである場合)にはロータ7を設定回転数Nmaxで回転させる(ステップS2)。
【0020】
そして、温度センサ12の検出温度が所望の温度Taに達すると(ステップS3での判断結果がYesとなると)、制御モードを切り替える(ステップS4:モード切替工程)。尚、本実施の形態では、検出温度が所望の温度Taに達するか否かで説明したが、或る範囲を許容して切り替えるようにしても構わない。
【0021】
制御モードを切り替えた後、検出温度が所望の目標温度Taとなるようにモータ3の回転数を以下のように制御する。
【0022】
即ち、所望の目標温度Taと温度センサ12の検出温度Tとの差を求め(ステップS5:温度差算出工程)、その差から比例・積分・微分の項から成るPID演算を実行し、検出温度Tが目標温度Taよりも高いとき(T>Ta)には目標回転数Naが低くなるよう、逆に検出温度Tが目標温度Taよりも低いとき(T<Ta)には目標回転数Naが高くなるように目標回転数Naを算出する(ステップS6:目標回転数算出工程)。そして、実際の回転数Nが算出された目標回転数Naになるようにする回転数制御(ステップS2:回転数制御工程)においてモータ4の回転数を制御し、ステップS5→ステップS6→ステップS2の処理ステップを順次繰返し実行する。一般的にロータ7の回転数Nが高くなると発熱量も増え、ロータ7の温度は回転数Nの2乗〜3乗のカーブで上昇する。つまり、僅かな回転数の差で発熱量の変化が大きくなる。このため、温度制御精度を高めるためには、温度の差分をPID演算して目標回転数Naを算出する手法が好ましい。
【0023】
而して、温度センサ12の検出温度Tが所望の目標温度Taになると、操作パネル14より予熱完了を表示したり、不図示のブザーを鳴らせてそのことをオペレータに知らせる。そして、オペレータによって停止の指示操作がなされるまで、検出温度Tが所望の目標温度Taを維持するようにモータ3の回転数制御(ステップS2)が実行される(図4参照)。
【0024】
又、予熱完了の表示、ブザー音或いはメロディー音を鳴らしながら一旦運転を停止し、オペレータからの予熱完了の指示操作(停止スイッチONや、運転時間、設定速度等の運転条件の入力等)が無い場合には、所望の目標範囲外(例えば設定温度から5℃外れた場合)になった場合には、再び検出温度Tが所望の目標温度(設定温度)Taになるようにモータ3の回転数制御を実行しても良い。
【0025】
尚、以上説明した温度フィードバックによる回転数制御においては、特にロータ7を加温する際は冷凍機9を駆動しないため、電気エネルギーの消費量を極めて低く抑えることができる。
【0026】
以上のように、本実施の形態では、ロータ7を高速回転させることによって発生するロータ室3内でのロータ7と空気との摩擦熱を利用してロータ7を加熱し、ロータ室3内の温度を温度センサ12によって検出して制御装置13にフィードバックし、ロータ室3内の温度が所望の目標温度Taとなるようにモータ4の回転数を制御するようにしたため、ロータ7を加温するための恒温槽やヒータ等の熱器具が不要となり、ロータ7を効率良く加温して該ロータ7を所望の目標温度Taに予熱することができ、コスト及び省エネルギーの面で有利となる。
【0027】
又、熱容量の大きなエバポレータ10も所望の温度になるために保温効果があり、モータ4を減速して停止した後もロータ7を所望の温度に保持することができる。
【0028】
尚、本発明は上記実施の形態に適用が限定されるものではなく、その要旨を逸脱しない範囲内で種々の変更が可能である。
【図面の簡単な説明】
【0029】
【図1】本発明に係る遠心分離機の正断面図である。
【図2】本発明に係る遠心分離機のロータをモータ回転数制御によって温度制御する手順を示すフローチャートである。
【図3】本発明に係る遠心分離機のロータをモータ回転数制御によって温度制御する方法を示すブロック図である。
【図4】本発明に係る遠心分離機でのモータ回転数制御による温度制御におけるロータ回転数とロータ温度の時間変化を示す図である。
【符号の説明】
【0030】
1 遠心分離機
2 遠心分離機本体
3 ロータ室
4 モータ
5 エンコーダ
6 モータ軸
7 ロータ
8 ドア
9 冷凍機
10 エバポレータ
11 断熱材
12 温度センサ
13 制御装置
14 操作パネル
15 PWM駆動回路
Na
目標回転数
Nmax
設定回転数
Ta
目標温度
【技術分野】
【0001】
本発明は、試料を遠心分離する前にロータを所望の温度に予熱する方式を採用した遠心分離機に関するものである。
【背景技術】
【0002】
例えば家畜のBSE検査等を行う場合、検体試料が遠心分離機によって遠心分離されるが、この場合、検体試料を遠心分離する前にロータを所望の温度(例えば37℃)に予熱することが必要である。
【0003】
従来、遠心運転する前のロータ温度を所定の温度に予熱する方法には、予めロータを恒温槽等に入れてロータを所定の温度に保つ方法があるが、この方法では恒温槽等の特別な装置が必要であった。
【0004】
又、別の方法として、検体試料をセットする前に予備運転を行い、ロータを所定の温度に予熱する方法も知られている。この方法では、所望のロータ温度が室温よりも低い場合には、遠心分離機に備えた冷凍機を用いて温度制御を実行してロータを予冷する手法が採られていた。逆に、所望のロータ温度が室温よりも高い場合には、ロータ室の外周に巻き付けたエバポレータの周囲にヒータを設け、このヒータによる加熱に加えてロータを所定の回転数で回転させながら冷凍機のオン/オフ温度制御を実行する方法が採られていた。そして、このときの温度のオーバーシュート/アンダーシュートを小さくするため、ヒータをオン/オフ制御して熱容量が大きなエバポレータの温度変化を小さく抑え、ロータを所定の温度に制御する加温手法が採られていた(例えば、特許文献1参照)。
【特許文献1】特開平5−301059号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところが、上記後者の方法では、特にロータを加温する場合にロータを短時間で所定の温度に予熱するためにエバポレータの周囲にヒータを設ける必要があった。又、エバポレータの温度変化を小さく抑えるためにヒータのオン/オフ制御を実行していたため、複雑な温度制御となっていた。
【0006】
本発明は上記問題に鑑みてなされたもので、その目的とする処は、恒温槽やヒータ等の熱器具を要することなく、ロータを所望の温度に効率良く予熱することができる遠心分離機を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するため、請求項1記載の発明は、試料を収容するロータと、該ロータを回転駆動するモータと、前記ロータを収容するロータ室と、該ロータ室の温度を検出する温度センサと、前記ロータの設定回転数と設定温度を入力するための操作パネルを備えた遠心分離機において、前記温度センサからフィードバックされる検出温度に基づいて前記ロータの温度が設定温度となるよう前記モータの回転数を制御する制御装置を設けたことを特徴とする。
【0008】
請求項2記載の発明は、請求項1記載の発明において、前記制御装置は、前記モータを回転加速させて前記ロータを所定の回転数で制御する回転数制御工程と、前記ロータが所定の温度に達すると制御モードを切り替えるモード切替工程と、目標温度と検出温度との差を求める温度差算出工程と、求められた温度差から目標回転数を算出する目標回転数算出工程を経て前記ロータの温度が設定温度となるよう前記モータの回転数を制御することを特徴とする。
【発明の効果】
【0009】
本発明によれば、ロータを高速回転させることによって発生するロータ室内の空気との摩擦熱を利用してロータを加熱し、そのロータ室内の温度を温度センサにより検出し、その温度が所望の温度になるようにモータの回転数を制御するようにしたため、ロータを予熱するための恒温槽やヒータ等の熱器具を要することなく、ロータを所望の温度に効率良く予熱することができ、コスト及び省エネルギーの面で有利な遠心分離機を得ることができる。
【発明を実施するための最良の形態】
【0010】
以下に本発明の実施形態を添付図面に基づいて説明する。
【0011】
図1は本発明に係る遠心分離機の正断面図、図2は同遠心分離機のロータをモータ回転数制御によって温度制御する手順を示すフローチャート、図3は同ロータをモータ回転数制御によって温度制御する方法を示すブロック図、図4は同温度制御におけるロータ回転数とロータ温度の時間変化を示す図である。
【0012】
図1に遠心分離機1は、本体2内にロータ室3を備え、該ロータ室3の下方には駆動源であるモータ4と該モータ4の回数数を検出するためのエンコーダ5が設けられている。モータ4から上方へ延びる出力軸(モータ軸)6はロータ室3内に臨んでおり、その先端部にはロータ7が着脱可能に装着されている。又、ロータ室3の上面開口部はドア8によって開閉され、ロータ室3の外周には冷凍機9より配管されたエバポレータ10が巻装されており、その周囲は断熱材11で覆われている。更に、ロータ室3の底部には、該ロータ室3内の温度を検出するための温度センサ12が設けられている。
【0013】
又、遠心分離機本体2内の冷凍機9の上方には制御装置13が設けられ、本体2の上部には操作パネル14が設置されており、制御装置13には、前記モータ4、エンコーダ5、冷凍機9、温度センサ12及び操作パネル14が電気的に接続されている。
【0014】
而して、ロータ7内に収容された不図示の検体試料は、モータ4によってロータ7がロータ室3内で所定の速度で回転駆動されることによって遠心分離されるが、遠心分離に先立ちロータ7は回転数制御によって所定の温度(例えば、37℃)に予熱される。
【0015】
即ち、操作パネル14からロータ7の回転数と温度の設定値が入力されると、制御装置13は、入力された回転数と温度の設定値に基づきエンコーダ5によって検出された回転数信号のフィードバックを受けてモータ3の回転数制御を実行する。又、制御装置13は、ロータ7が収容されているロータ室3の底部に設けた前記温度センサ12からロータ室3の検出温度のフィードバックを受け、検体試料を遠心分離する際に該検体試料の温度が設定された温度になるよう冷凍機9をオン/オフ制御する。
【0016】
以下、本発明に係る遠心分離機1の温度制御方法を図2〜図4に基づいて具体的に説明する。尚、図2において、(a)は温度制御手順の全体の流れを示すフローチャート、(b)はモータの回転数制御を示すサブルーチンである。
【0017】
オペレータによって、検体試料が入っていない予熱すべきロータ7が予めセットされ、ロータ7の番号情報、予熱すべき目標温度Taを設定する。ロータ7の番号情報には、そのロータ7の許容最高回転数等が設定されており、オペレータによって予熱運転スタート操作がなされると(ステップS0)、制御装置13は、ロータ7の許容最高回転数である設定回転数Nmaxまでモータ4を回転加速させる(ステップS1、図4参照)。そして、制御装置6は、ロータ7の回転数が設定回転数Nmax付近になると、エンコーダ5からの検出信号をフィードバックする回転数制御を実行する(ステップS2:回転数制御工程)。
【0018】
回転数制御工程(ステップS2)においては、先ずエンコーダ5の出力パルス信号から現在回転数Nを算出する(ステップS20)。この現在回転数Nの算出は、或る単位時間当りの移動パルス数から回転数を換算することによってなされる。そして、目標となる設定回転数Nmaxと現在回転数Nの差を求め(ステップS21)、その差の比例・積分・微分の項から成る所謂PID演算を行ってパルス・ワイド・モジュレーションと称されるPWM値を算出し(ステップS22)、演算を終了する(ステップS23)。ここで、PWM値は、モータ4に印加する電圧を図3に示すPWM駆動回路15によってコントロールする(パルスのデューティ比を変える)。この手法はモータ4の回転数を制御する一般的な手法であるため、これについての詳細な説明は省略する。
【0019】
而して、ロータ7は、高速で回転するためにロータ室3内の空気との摩擦で加熱され、該ロータ7とロータ室3及びエバポレータ10の温度は次第に上昇する。ロータ室3の底部に設けた温度センサ12の検出温度が所望の温度Ta(例えば37℃)に達したか否かが判断され(ステップS3)、所望の温度Taに未だ達していない場合(ステップS3での判断結果がNoである場合)にはロータ7を設定回転数Nmaxで回転させる(ステップS2)。
【0020】
そして、温度センサ12の検出温度が所望の温度Taに達すると(ステップS3での判断結果がYesとなると)、制御モードを切り替える(ステップS4:モード切替工程)。尚、本実施の形態では、検出温度が所望の温度Taに達するか否かで説明したが、或る範囲を許容して切り替えるようにしても構わない。
【0021】
制御モードを切り替えた後、検出温度が所望の目標温度Taとなるようにモータ3の回転数を以下のように制御する。
【0022】
即ち、所望の目標温度Taと温度センサ12の検出温度Tとの差を求め(ステップS5:温度差算出工程)、その差から比例・積分・微分の項から成るPID演算を実行し、検出温度Tが目標温度Taよりも高いとき(T>Ta)には目標回転数Naが低くなるよう、逆に検出温度Tが目標温度Taよりも低いとき(T<Ta)には目標回転数Naが高くなるように目標回転数Naを算出する(ステップS6:目標回転数算出工程)。そして、実際の回転数Nが算出された目標回転数Naになるようにする回転数制御(ステップS2:回転数制御工程)においてモータ4の回転数を制御し、ステップS5→ステップS6→ステップS2の処理ステップを順次繰返し実行する。一般的にロータ7の回転数Nが高くなると発熱量も増え、ロータ7の温度は回転数Nの2乗〜3乗のカーブで上昇する。つまり、僅かな回転数の差で発熱量の変化が大きくなる。このため、温度制御精度を高めるためには、温度の差分をPID演算して目標回転数Naを算出する手法が好ましい。
【0023】
而して、温度センサ12の検出温度Tが所望の目標温度Taになると、操作パネル14より予熱完了を表示したり、不図示のブザーを鳴らせてそのことをオペレータに知らせる。そして、オペレータによって停止の指示操作がなされるまで、検出温度Tが所望の目標温度Taを維持するようにモータ3の回転数制御(ステップS2)が実行される(図4参照)。
【0024】
又、予熱完了の表示、ブザー音或いはメロディー音を鳴らしながら一旦運転を停止し、オペレータからの予熱完了の指示操作(停止スイッチONや、運転時間、設定速度等の運転条件の入力等)が無い場合には、所望の目標範囲外(例えば設定温度から5℃外れた場合)になった場合には、再び検出温度Tが所望の目標温度(設定温度)Taになるようにモータ3の回転数制御を実行しても良い。
【0025】
尚、以上説明した温度フィードバックによる回転数制御においては、特にロータ7を加温する際は冷凍機9を駆動しないため、電気エネルギーの消費量を極めて低く抑えることができる。
【0026】
以上のように、本実施の形態では、ロータ7を高速回転させることによって発生するロータ室3内でのロータ7と空気との摩擦熱を利用してロータ7を加熱し、ロータ室3内の温度を温度センサ12によって検出して制御装置13にフィードバックし、ロータ室3内の温度が所望の目標温度Taとなるようにモータ4の回転数を制御するようにしたため、ロータ7を加温するための恒温槽やヒータ等の熱器具が不要となり、ロータ7を効率良く加温して該ロータ7を所望の目標温度Taに予熱することができ、コスト及び省エネルギーの面で有利となる。
【0027】
又、熱容量の大きなエバポレータ10も所望の温度になるために保温効果があり、モータ4を減速して停止した後もロータ7を所望の温度に保持することができる。
【0028】
尚、本発明は上記実施の形態に適用が限定されるものではなく、その要旨を逸脱しない範囲内で種々の変更が可能である。
【図面の簡単な説明】
【0029】
【図1】本発明に係る遠心分離機の正断面図である。
【図2】本発明に係る遠心分離機のロータをモータ回転数制御によって温度制御する手順を示すフローチャートである。
【図3】本発明に係る遠心分離機のロータをモータ回転数制御によって温度制御する方法を示すブロック図である。
【図4】本発明に係る遠心分離機でのモータ回転数制御による温度制御におけるロータ回転数とロータ温度の時間変化を示す図である。
【符号の説明】
【0030】
1 遠心分離機
2 遠心分離機本体
3 ロータ室
4 モータ
5 エンコーダ
6 モータ軸
7 ロータ
8 ドア
9 冷凍機
10 エバポレータ
11 断熱材
12 温度センサ
13 制御装置
14 操作パネル
15 PWM駆動回路
Na
目標回転数
Nmax
設定回転数
Ta
目標温度
【特許請求の範囲】
【請求項1】
試料を収容するロータと、該ロータを回転駆動するモータと、前記ロータを収容するロータ室と、該ロータ室の温度を検出する温度センサと、前記ロータの設定回転数と設定温度を入力するための操作パネルを備えた遠心分離機において、
前記温度センサからフィードバックされる検出温度に基づいて前記ロータの温度が設定温度となるよう前記モータの回転数を制御する制御装置を設けたことを特徴とする遠心分離機。
【請求項2】
前記制御装置は、前記モータを回転加速させて前記ロータを所定の回転数で制御する回転数制御工程と、前記ロータが所定の温度に達すると制御モードを切り替えるモード切替工程と、目標温度と検出温度との差を求める温度差算出工程と、求められた温度差から目標回転数を算出する目標回転数算出工程を経て前記ロータの温度が設定温度となるよう前記モータの回転数を制御することを特徴とする請求項1記載の遠心分離機。
【請求項1】
試料を収容するロータと、該ロータを回転駆動するモータと、前記ロータを収容するロータ室と、該ロータ室の温度を検出する温度センサと、前記ロータの設定回転数と設定温度を入力するための操作パネルを備えた遠心分離機において、
前記温度センサからフィードバックされる検出温度に基づいて前記ロータの温度が設定温度となるよう前記モータの回転数を制御する制御装置を設けたことを特徴とする遠心分離機。
【請求項2】
前記制御装置は、前記モータを回転加速させて前記ロータを所定の回転数で制御する回転数制御工程と、前記ロータが所定の温度に達すると制御モードを切り替えるモード切替工程と、目標温度と検出温度との差を求める温度差算出工程と、求められた温度差から目標回転数を算出する目標回転数算出工程を経て前記ロータの温度が設定温度となるよう前記モータの回転数を制御することを特徴とする請求項1記載の遠心分離機。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2009−581(P2009−581A)
【公開日】平成21年1月8日(2009.1.8)
【国際特許分類】
【出願番号】特願2007−160899(P2007−160899)
【出願日】平成19年6月19日(2007.6.19)
【出願人】(000005094)日立工機株式会社 (1,861)
【Fターム(参考)】
【公開日】平成21年1月8日(2009.1.8)
【国際特許分類】
【出願日】平成19年6月19日(2007.6.19)
【出願人】(000005094)日立工機株式会社 (1,861)
【Fターム(参考)】
[ Back to top ]