
遠心力付与装置および検体液分析装置
【課題】 チップの姿勢を正確に変更することができるとともに、配線構造の簡素化を図り、チップ保持部の破損等の障害が発生した場合を判定することができる遠心力付与装置を提供する。
【解決手段】 チップ保持部26の回転軸方向に鍔状に突出してチップ保持部26の外周の異なる箇所に設けられた2つの被検出部26c、26dと、姿勢検出回転角度位置において、マイクロチップ200の姿勢が正姿勢回転角度位置であるときに被検出部26cに、マイクロチップ200の姿勢が左姿勢回転角度位置であるときに被検出部26dにレーザ光を照射しかつその反射光を受光可能な姿勢センサ13と、姿勢検出回転角度位置において、マイクロチップ200の姿勢が右姿勢回転角度位置であるときに被検出部26cに、マイクロチップ200の姿勢が正姿勢回転角度位置であるときに被検出部26dにレーザ光を照射しかつその反射光を受光可能な姿勢センサ14とを備える。
【解決手段】 チップ保持部26の回転軸方向に鍔状に突出してチップ保持部26の外周の異なる箇所に設けられた2つの被検出部26c、26dと、姿勢検出回転角度位置において、マイクロチップ200の姿勢が正姿勢回転角度位置であるときに被検出部26cに、マイクロチップ200の姿勢が左姿勢回転角度位置であるときに被検出部26dにレーザ光を照射しかつその反射光を受光可能な姿勢センサ13と、姿勢検出回転角度位置において、マイクロチップ200の姿勢が右姿勢回転角度位置であるときに被検出部26cに、マイクロチップ200の姿勢が正姿勢回転角度位置であるときに被検出部26dにレーザ光を照射しかつその反射光を受光可能な姿勢センサ14とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、チップに遠心力を付与する装置および検体液を分析する装置に係り、特に、チップの姿勢を正確に変更することができるとともに、配線構造の簡素化を図り、チップ保持部の破損等の障害が発生した場合を判定することができる遠心力付与装置および検体液分析装置に関する。
【背景技術】
【0002】
検体液として血液を採取し、採取した血液を遠心分離して、血液中の赤血球、白血球、リンパ球、血小板、血液凝固因子等を分離し、分離によって得られた血清等の成分のpH値、酸素あるいは二酸化炭素等の濃度を測定する分析方法がある。
測定方法としては、例えば、血清等の被検査液に試薬を加えることによって得られた吸光成分を含有する測定対象液に対して光源から放射された光を照射し、これにより測定対象液を透過した光を受光部に受光させることによって得られる吸光度から被検査液中の検出対象成分の濃度を算出する。
【0003】
また、近年、μ−TAS(Total Analysis System)やLab.on.Chip(マイクロ全分析システムやチップ上研究室)と称されるマイクロチップを使用した分析方法が注目されている。
例えば、数cm角のチップ上にマイクロキャピラリと呼ばれる微細な溝状構造物を形成し、これに蓋をして流路を構成したマイクロチップを使用する。そして、DNAを中性ゲル中にいれ、DNAは電荷を有するので電気泳動によりマイクロキャピラリ流路中を移動させ、分子量の相違による総電荷相違により分離する。また、マイクロキャピラリ中を移動する物質に途中から他の試薬を入れ、吸光度の分析等、試薬による反応を検出する研究も盛んに行われている。
【0004】
従来、検体液の分析に用いるマイクロチップとしては、例えば、特許文献1記載の検査チップが知られている。
特許文献1記載の検査チップは、試料中の対象成分を定量する少なくとも1つの定量部を有し、定量部は、検査チップを所定の回転軸を中心として回転させることにより、試料から対象成分を遠心分離する遠心分離管と、遠心分離管の一方の端部に接続され、回転軸を中心とした回転により対象成分を秤量するための秤量管と、秤量管に接続され、対象成分を遠心分離管から秤量管に移送する移送手段と、試薬が貯蔵される少なくとも1つの試薬溜と、試薬溜および秤量管に接続されており、回転軸を中心とした再度の回転により秤量管から導入される対象成分が、対象成分が回転軸を中心とした回転により試薬溜から導入された試薬と混合される混合部と混合部に接続され、試薬および対象成分が混合された混合物質を通過させる光検出路と、光検出路に接続され、光検出路に光を導入するための光導入口と、光検出路に接続され、光検出路内を通過後の光を取り出すための光導出口とを有している。
【0005】
また、特許文献1記載の検査チップを遠心分離する装置として、例えば、特許文献2記載のマイクロチップ用遠心分離機が知られている。
特許文献2記載のマイクロチップ用遠心分離機は、分離部、秤量部、混合部を有するマイクロチップを、所定の回転角度に保持して分離を行うマイクロチップ用遠心分離装置において、遠心分離装置は、モータによって回転される第1回転体と、マイクロチップを保持し、第1回転体の回転軸を中心に回転可能に設けられた1個または複数個の第2回転体とを備え、所定の回転角度の状態で、モータが回転される時、第1回転体、第2回転体およびマイクロチップが一体に回転されて遠心分離が行われる第1の態様と、モータの回転を停止している状態で、第2回転体を回転させ、マイクロチップを他の所定の回転角度に保持する第2の態様とを有する。
【0006】
第2の態様において、マイクロチップを時計回りに90[°]回転させる場合は、作業者が回転レバーをスプリングバンドのバネ力に抗して上部に持ち上げ、回転規制溝と主軸連結ピンとの係合を解除し、回転レバーを反時計回りに180[°]回転させる。その結果、回転レバーに設けられた係合ピンは副回転ギアと係合された状態にあるので、副回転ギアも反時計回りに180[°]回転し、さらに副回転ギアと歯合している第2回転体が時計回りに90[°]回転し、マイクロチップが時計回りに90[°]回転する(同文献〔0017〕)。
【特許文献1】特開2005−114438号公報
【特許文献2】特開2006−110491号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献2記載の技術にあっては、マイクロチップを時計回りに90[°]回転させるには、回転レバーを反時計回りに180[°]回転させる必要があるため、作業者は、回転レバーを回転させながらマイクロチップがどれぐらい回転したかを目視により確認し位置決めを行わなければならず、マイクロチップの姿勢を所定の回転角度位置に正確に変更することが困難であるという問題があった。正確な回転が実現できない場合は、十分な測定結果が得られないばかりか、チップ保持部の破損やマイクロチップの脱落といった障害につながる可能性がある。
【0008】
そこで、第2回転体の回転軸にレゾルバ等の回転センサを設け、作業者は、回転センサの検出結果を見ながらマイクロチップを回転させる構成が考えられる。
しかしながら、このような構成にあっては、第2回転体が第1回転体上に設けられているため、回転センサの配線を第1回転体の回転軸内を通して外部に取り出さなければならず、配線構造が複雑となるという問題がある。また、遠心分離中にチップ保持部の破損やマイクロチップの脱落といった障害が生じた場合は、回転センサでは破損等までは検出することができないという問題がある。
【0009】
そこで、本発明は、このような従来の技術の有する未解決の課題に着目してなされたものであって、チップの姿勢を正確に変更することができるとともに、配線構造の簡素化を図り、チップ保持部の破損等の障害が発生した場合を判定することができる遠心力付与装置および検体液分析装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
〔発明1〕 上記目的を達成するために、発明1の遠心力付与装置は、所定方向に付与される遠心力に応じて、検体液の成分を分離し、分離後の成分を当該チップの所定位置に案内可能な検体液分析用のチップを、前記所定方向に遠心力が付与される姿勢で保持し回転させることにより、前記チップに対して前記所定方向に遠心力を付与する遠心力付与装置であって、前記所定方向と直交する軸回りに回転可能な第1回転体と、前記第1回転体を回転させる第1回転手段と、前記チップを保持するためのチップ保持部と、前記第1回転体におけるその回転中心から離れた位置に設けられ、前記直交する軸回りに前記チップ保持部を回転可能な第2回転体と、前記第2回転体を回転させる第2回転手段と、前記チップの姿勢を保持し前記第1回転手段により回転を行う第1遠心分離制御、および前記第1遠心分離制御時とは異なる前記第2回転体の回転角度位置で前記チップの姿勢を保持し前記第1回転手段により回転を行う第2遠心分離制御を行う遠心分離制御手段と、前記チップ保持部に設けられ、光反射特性を有する被検出部と、前記チップの姿勢を検出するための前記第1回転体の回転角度位置である姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第1回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第1姿勢センサと、前記姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第2回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第2姿勢センサとを備える。
【0011】
このような構成であれば、チップ保持部にチップを保持し、遠心分離制御手段により、チップの姿勢を保持し第1回転手段により回転を行う第1遠心分離制御が行われる。その結果、第1回転手段により、所定方向と直交する軸回りに第1回転体が回転するが、第2回転体は、第1回転体におけるその回転中心から離れた位置に設けられているので、第1回転体と一体に回転する。そして、チップ保持部も第2回転体と一体に回転する。したがって、チップには、第1回転体の回転により所定方向の遠心力が付与される。
【0012】
第1遠心分離制御が終了すると、第2回転手段により、姿勢検出回転角度位置において、例えば、第1回転角度位置または第2回転角度位置まで第2回転体を回転させる。
このとき、チップの姿勢が第1回転角度位置であると、第1姿勢センサにより、照射された光がチップ保持部の被検出部で反射し、その反射光を受光することができるので、チップの姿勢が第1回転角度位置であることを検出することができる。
【0013】
また、チップの姿勢が第2回転角度位置であると、第2姿勢センサにより、照射された光がチップ保持部の被検出部で反射し、その反射光を受光することができるので、チップの姿勢が第2回転角度位置であることを検出することができる。
さらに、チップ保持部の破損やチップの脱落といった障害が生じた場合は、第2回転手段により、第1回転角度位置または第2回転角度位置の前後を回転させても、第1姿勢センサまたは第2姿勢センサで反射光を受光できず被検出部を検出できないことがあるので、障害が生じたことを判定することができる。
【0014】
その後、遠心分離制御手段により、第1回転角度位置または第2回転角度位置でチップの姿勢を保持し第1回転手段により回転を行う第2遠心分離制御が行われる。その結果、第1回転手段により、所定方向と直交する軸回りに第1回転体が回転し、第2回転体が第1回転体と一体に回転する。そして、チップ保持部も第2回転体と一体に回転する。したがって、チップには、第1回転体の回転により所定方向の遠心力が付与される。
【0015】
所定方向への遠心力の付与により、チップ内では、検体液の成分が分離され、分離後の成分が所定位置に案内される。この状態で、所定位置に対して測定処理を行うことができる。
なお、姿勢検出回転角度位置においてチップの姿勢が第1回転角度位置および第2回転角度位置のいずれでもないと、第1姿勢センサおよび第2姿勢センサで反射光を受光できないので、第1回転角度位置および第2回転角度位置以外の回転角度位置であることを判定することもできる。例えば、第2回転手段が、第1回転角度位置、第2回転角度位置および第3回転角度位置に所定順序で第2回転体を回転させる構成であれば、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて第3回転角度位置を特定することができる。
【0016】
ここで、チップ保持部は、チップを保持するためのものであり、実際にチップを保持していることまでは要しない。以下、発明2の検体液分析装置において同じである。
また、被検出部は、例えば、ミラー、色彩、模様または起伏形状により光反射特性を実現することができる。以下、発明2の検体液分析装置において同じである。
また、第2回転手段は、アクチュエータ等により第2回転体を自動で回転させる構成となっていてもよいし、回転レバー等により第2回転体を手動で回転させる構成となっていてもよい。後者の場合は、第1姿勢センサおよび第2姿勢センサの検出結果を見ながら回転させればよい。以下、発明2の検体液分析装置において同じである。
【0017】
また、第1回転体および第2回転体は、例えば、アームであってもよいし、テーブルやステージであってもよい。また、その形状は、板のように平面的であってもよいし、筐体のように立体的であってもよい。以下、発明2の検体液分析装置において同じである。
また、第1回転手段は、第1回転体の重心位置を回転中心として回転させてもよいし、第1回転体の偏心位置を回転中心として回転させてもよい。以下、発明2の検体液分析装置において同じである。
また、第2回転手段は、第2回転体の重心位置を回転中心として回転させてもよいし、第2回転体の偏心位置を回転中心として回転させてもよい。以下、発明2の検体液分析装置において同じである。
【0018】
〔発明2〕 一方、上記目的を達成するために、発明2の検体液分析装置は、光学的な測定処理を行う測定部を有し、所定方向に付与される遠心力に応じて、検体液の成分を分離し、分離後の成分と試薬とを混合し、試薬混合後の成分を前記測定部に案内可能な検体液分析用のチップを、前記所定方向に遠心力が付与される姿勢で保持し回転させることにより、前記チップに対して前記所定方向に遠心力を付与し、前記測定部に対して前記測定処理を行う検体液分析装置であって、前記所定方向と直交する軸回りに回転可能な第1回転体と、前記第1回転体を回転させる第1回転手段と、前記チップを保持するためのチップ保持部と、前記第1回転体におけるその回転中心から離れた位置に設けられ、前記直交する軸回りに前記チップ保持部を回転可能な第2回転体と、前記第2回転体を回転させる第2回転手段と、前記チップの姿勢を保持し前記第1回転手段により回転を行う第1遠心分離制御、および前記第1遠心分離制御時とは異なる前記第2回転体の回転角度位置で前記チップの姿勢を保持し前記第1回転手段により回転を行う第2遠心分離制御を行う遠心分離制御手段と、前記チップを測定するための前記第1回転体の回転角度位置である測定回転角度位置において前記チップ保持部に保持されたチップの前記測定部に光を照射しかつその透過光を受光可能な測定センサと、前記チップ保持部に設けられ、光反射特性を有する被検出部と、前記チップの姿勢を検出するための前記第1回転体の回転角度位置である姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第1回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第1姿勢センサと、前記姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第2回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第2姿勢センサとを備える。
【0019】
このような構成であれば、チップ保持部にチップを保持し、遠心分離制御手段により、チップの姿勢を保持し第1回転手段により回転を行う第1遠心分離制御が行われる。その結果、第1回転手段により、所定方向と直交する軸回りに第1回転体が回転するが、第2回転体は、第1回転体におけるその回転中心から離れた位置に設けられているので、第1回転体と一体に回転する。そして、チップ保持部も第2回転体と一体に回転する。したがって、チップには、第1回転体の回転により所定方向の遠心力が付与される。
【0020】
第1遠心分離制御が終了すると、第2回転手段により、姿勢検出回転角度位置において、例えば、第1回転角度位置または第2回転角度位置まで第2回転体を回転させる。
このとき、チップの姿勢が第1回転角度位置であると、第1姿勢センサにより、照射された光がチップ保持部の被検出部で反射し、その反射光を受光することができるので、チップの姿勢が第1回転角度位置であることを検出することができる。
【0021】
また、チップの姿勢が第2回転角度位置であると、第2姿勢センサにより、照射された光がチップ保持部の被検出部で反射し、その反射光を受光することができるので、チップの姿勢が第2回転角度位置であることを検出することができる。
さらに、チップ保持部の破損やチップの脱落といった障害が生じた場合は、第2回転手段により、第1回転角度位置または第2回転角度位置の前後を回転させても、第1姿勢センサまたは第2姿勢センサで反射光を受光できず被検出部を検出できないことがあるので、障害が生じたことを判定することができる。
【0022】
その後、遠心分離制御手段により、第1回転角度位置または第2回転角度位置でチップの姿勢を保持し第1回転手段により回転を行う第2遠心分離制御が行われる。その結果、第1回転手段により、所定方向と直交する軸回りに第1回転体が回転し、第2回転体が第1回転体と一体に回転する。そして、チップ保持部も第2回転体と一体に回転する。したがって、チップには、第1回転体の回転により所定方向の遠心力が付与される。
【0023】
所定方向への遠心力の付与により、チップ内では、検体液の成分が分離され、分離後の成分と試薬とが混合され、試薬混合後の成分が測定部に案内される。この状態で、第1回転手段により測定回転角度位置まで回転させると、測定センサにより、照射された光がチップの測定部を透過し、その透過光を受光することができるので、測定部に対して測定処理を行うことができる。
【0024】
なお、姿勢検出回転角度位置においてチップの姿勢が第1回転角度位置および第2回転角度位置のいずれでもないと、第1姿勢センサおよび第2姿勢センサで反射光を受光できないので、第1回転角度位置および第2回転角度位置以外の回転角度位置であることを判定することもできる。例えば、第2回転手段が、第1回転角度位置、第2回転角度位置および第3回転角度位置に所定順序で第2回転体を回転させる構成であれば、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて第3回転角度位置を特定することができる。
【0025】
また、第2遠心分離制御のために、第1回転角度位置または第2回転角度位置まで第2回転体を回転させる場合に限らず、例えば、測定回転角度位置において測定センサの測定範囲に測定部が属することとなるように、第2回転手段により、姿勢検出回転角度位置において第1回転角度位置または第2回転角度位置まで第2回転体を回転させてもよい。
【0026】
〔発明3〕 さらに、発明3の検体液分析装置は、発明2の検体液分析装置において、前記チップ保持部の回転軸方向に鍔状に突出して前記チップ保持部の外周の異なる箇所に設けられた2つの前記被検出部を備え、前記第1姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第1回転角度位置であるときに一方の前記被検出部に、前記チップの姿勢が前記第2回転体の第3回転角度位置であるときに他方の前記被検出部に光を照射しかつその反射光を受光可能であり、前記第2姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第2回転角度位置であるときに前記一方の被検出部に、前記チップの姿勢が前記第1回転角度位置であるときに前記他方の被検出部に光を照射しかつその反射光を受光可能である。
【0027】
このような構成であれば、姿勢検出回転角度位置においてチップの姿勢が第1回転角度位置であると、第1姿勢センサにより、照射された光が一方の被検出部で反射し、その反射光を受光することができるとともに、第2姿勢センサにより、照射された光が他方の被検出部で反射し、その反射光を受光することができるので、チップの姿勢が第1回転角度位置であることを検出することができる。
【0028】
また、姿勢検出回転角度位置においてチップの姿勢が第2回転角度位置であると、第2姿勢センサにより、照射された光が一方の被検出部で反射し、その反射光を受光することができるが、第1姿勢センサでは反射光を受光できないので、チップの姿勢が第2回転角度位置であることを検出することができる。
また、姿勢検出回転角度位置においてチップの姿勢が第3回転角度位置であると、第1姿勢センサにより、照射された光が他方の被検出部で反射し、その反射光を受光することができるが、第2姿勢センサでは反射光を受光できないので、チップの姿勢が第3回転角度位置であることを検出することができる。
【0029】
なお、姿勢検出回転角度位置においてチップの姿勢が第1回転角度位置、第2回転角度位置および第3回転角度位置のいずれでもないと、第1姿勢センサおよび第2姿勢センサで反射光を受光できないので、第1回転角度位置、第2回転角度位置および第3回転角度位置以外の回転角度位置であることを判定することもできる。例えば、第2回転手段が、第1回転角度位置、第2回転角度位置、第3回転角度位置および第4回転角度位置に所定順序で第2回転体を回転させる構成であれば、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて第4回転角度位置を特定することができる。
【0030】
〔発明4〕 さらに、発明4の検体液分析装置は、発明2の検体液分析装置において、前記チップ保持部の回転軸方向に鍔状に突出して前記チップ保持部の外周の異なる箇所に設けられた2つの前記被検出部を備え、前記第1姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第1回転角度位置であるときに一方の前記被検出部に、前記チップの姿勢が前記第2回転角度位置であるときに他方の前記被検出部に光を照射しかつその反射光を受光可能であり、前記第2姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第2回転角度位置であるときに前記一方の被検出部に、前記チップの姿勢が前記第2回転体の第3回転角度位置であるときに前記他方の被検出部に光を照射しかつその反射光を受光可能である。
【0031】
このような構成であれば、姿勢検出回転角度位置においてチップの姿勢が第1回転角度位置であると、第1姿勢センサにより、照射された光が一方の被検出部で反射し、その反射光を受光することができるが、第2姿勢センサでは反射光を受光できないので、チップの姿勢が第1回転角度位置であることを検出することができる。
また、姿勢検出回転角度位置においてチップの姿勢が第2回転角度位置であると、第1姿勢センサにより、照射された光が他方の被検出部で反射し、その反射光を受光することができるとともに、第2姿勢センサにより、照射された光が一方の被検出部で反射し、その反射光を受光することができるので、チップの姿勢が第2回転角度位置であることを検出することができる。
【0032】
また、姿勢検出回転角度位置においてチップの姿勢が第3回転角度位置であると、第2姿勢センサにより、照射された光が他方の被検出部で反射し、その反射光を受光することができるが、第1姿勢センサでは反射光を受光できないので、チップの姿勢が第3回転角度位置であることを検出することができる。
なお、姿勢検出回転角度位置においてチップの姿勢が第1回転角度位置、第2回転角度位置および第3回転角度位置のいずれでもないと、第1姿勢センサおよび第2姿勢センサで反射光を受光できないので、第1回転角度位置、第2回転角度位置および第3回転角度位置以外の回転角度位置であることを判定することもできる。例えば、第2回転手段が、第1回転角度位置、第2回転角度位置、第3回転角度位置および第4回転角度位置に所定順序で第2回転体を回転させる構成であれば、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて第4回転角度位置を特定することができる。
【0033】
〔発明5〕 さらに、発明5の検体液分析装置は、発明3および4のいずれか1の検体液分析装置において、前記第1遠心分離制御は、前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のいずれかで前記チップの姿勢を保持し前記第1回転手段により前記第1回転体を所定回数回転させる第1分離回転制御からなり、前記第2遠心分離制御は、前記第1回転手段により前記姿勢検出回転角度位置まで前記第1回転体を回転させ、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記第2回転手段により、前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のうち前記第1分離回転制御時とは異なる回転角度位置に前記チップの姿勢を変更する姿勢制御と、前記姿勢制御で変更後の姿勢を保持し前記第1回転手段により前記第1回転体を所定回数回転させる第2分離回転制御とからなる。
【0034】
このような構成であれば、遠心分離制御手段により、第1遠心分離制御として第1分離回転制御が行われる。
第1分離回転制御では、第1回転角度位置、第2回転角度位置および第3回転角度位置のいずれかでチップの姿勢が保持されて第1回転手段により第1回転体が所定回数回転する。
【0035】
次いで、遠心分離制御手段により、第2遠心分離制御として姿勢制御および第2分離回転制御が行われる。
姿勢制御では、第1回転手段により姿勢検出回転角度位置まで第1回転体が回転し、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて、第2回転手段により、第1回転角度位置、第2回転角度位置および第3回転角度位置のうち第1分離回転制御時とは異なる回転角度位置にチップの姿勢が変更される。
そして、第2分離回転制御では、変更後の姿勢が保持されて第1回転手段により第1回転体が所定回数回転する。
【0036】
〔発明6〕 さらに、発明6の検体液分析装置は、発明5の検体液分析装置において、前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のうちいずれか2つは、前記測定回転角度位置において前記測定センサの第1測定範囲に前記測定部が属することとなる第1測定姿勢回転角度位置と、前記測定回転角度位置において前記測定センサの第2測定範囲に前記測定部が属することとなる第2測定姿勢回転角度位置とであり、さらに、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記第2回転手段により前記第1測定姿勢回転角度位置に前記チップの姿勢を変更し、前記第1回転手段により前記測定回転角度位置まで前記第1回転体を回転させ、前記測定センサにより前記測定処理を行う第1測定制御、並びに、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記第2回転手段により前記第2測定姿勢回転角度位置に前記チップの姿勢を変更し、前記第1回転手段により前記測定回転角度位置まで前記第1回転体を回転させ、前記測定センサにより前記測定処理を行う第2測定制御を行う測定制御手段を備える。
このような構成であれば、測定制御手段により第1測定制御が行われる。
【0037】
第1測定制御では、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて、第2回転手段により第1測定姿勢回転角度位置にチップの姿勢が変更され、第1回転手段により測定回転角度位置まで第1回転体が回転する。測定回転角度位置では、測定センサの第1測定範囲に測定部が属することとなるので、測定センサの第1測定範囲で測定部に対して1回目の測定処理が行われる。
次いで、測定制御手段により第2測定制御が行われる。
【0038】
第2測定制御では、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて、第2回転手段により第2測定姿勢回転角度位置にチップの姿勢が変更され、第1回転手段により測定回転角度位置まで第1回転体が回転する。測定回転角度位置では、測定センサの第2測定範囲に測定部が属することとなるので、測定センサの第2測定範囲で測定部に対して2回目の測定処理が行われる。このとき、測定センサにおいて、例えば、第1測定範囲および第2測定範囲でセンサ特性を異ならせておけば、第2測定制御では、第1測定制御とは異なる測定結果を得ることができる。
【0039】
〔発明7〕 さらに、発明7の検体液分析装置は、発明5および6のいずれか1の検体液分析装置において、前記遠心分離制御手段は、前記第1姿勢センサまたは前記第2姿勢センサの検出結果に基づいて前記姿勢検出回転角度位置で前記第1回転体を停止させる。
このような構成であれば、遠心分離制御手段により、第1姿勢センサまたは第2姿勢センサの検出結果に基づいて姿勢検出回転角度位置で第1回転体が停止する。
【0040】
〔発明8〕 さらに、発明8の検体液分析装置は、発明5ないし7のいずれか1の検体液分析装置において、さらに、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記チップの姿勢が、前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のいずれかであることを判定できないときは、前記第1遠心分離制御または前記第2遠心分離制御を禁止する制御禁止手段を備える。
【0041】
このような構成であれば、チップ保持部の破損やチップの脱落といった障害が生じた場合は、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて、チップの姿勢が、第1回転角度位置、第2回転角度位置および第3回転角度位置のいずれかであることを判定できないので、制御禁止手段により、第1遠心分離制御または第2遠心分離制御が禁止される。
【0042】
ここで、制御の禁止には、第1遠心分離制御または第2遠心分離制御を中断すること、および第1遠心分離処理または第2遠心分離制御を開始しないことを含む。
また、制御の禁止は、受動的または能動的に禁止することが含まれる。受動的な禁止とは、第1遠心分離制御または第2遠心分離制御を中断する場合、例えば、第1遠心分離制御または第2遠心分離制御を行うことを示す制御信号を与えないようにすることをいう。能動的な禁止とは、第1遠心分離制御または第2遠心分離制御を中断する場合、例えば、第1遠心分離制御または第2遠心分離制御を中断することを示す制御信号を与えることをいう。
【0043】
〔発明9〕 さらに、発明9の検体液分析装置は、発明2ないし8のいずれか1の検体液分析装置において、さらに、前記第2回転手段に駆動力を伝達する駆動力伝達手段を備え、前記駆動力伝達手段は、回転駆動手段と、前記回転駆動手段の回転駆動により回転するカムと、前記カムに従動して直線方向に変位可能なシャフトと、前記シャフトの先端に取り付けられたプッシャとを有し、前記第2回転手段は、前記プッシャの直進移動を回転運動に変換することにより前記第2回転体を回転させる。
【0044】
このような構成であれば、回転駆動手段が駆動すると、回転駆動手段の駆動力によりカムが回転し、カムに従動してシャフトが直進移動する。これに伴って、プッシャが直進移動し、第2回転手段により、プッシャの直進移動が回転運動に変換されて第2回転体が回転する。
【0045】
〔発明10〕 さらに、発明10の検体液分析装置は、発明2ないし9のいずれか1の検体液分析装置において、さらに、前記チップ保持部の回転軌跡外の位置から前記測定回転角度位置まで前記測定センサを移動させる移動手段を備え、前記移動手段は、回転駆動手段と、前記回転駆動手段の回転駆動により回転する円盤と、前記円盤の盤面上に一端が固定されたコネクティングロッドと、前記コネクティングロッドの他端に連結し前記測定センサの移動方向に変位可能なシャフトと、前記シャフトの先端に取り付けられた伝達部材とを有し、前記伝達部材の直進移動により前記測定センサを移動させる。
【0046】
このような構成であれば、回転駆動手段が駆動すると、回転駆動手段の駆動力により円盤が回転し、円盤に従動してコネクティングロッドの一端が回転する。これに伴って、シャフトおよび伝達部材が一体に測定センサの移動方向に直進移動し、伝達部材の直進移動により、チップ保持部の回転軌跡外の位置から測定回転角度位置まで測定センサが移動する。
【発明の効果】
【0047】
以上説明したように、発明1の遠心力付与装置、または発明2の検体液分析装置によれば、第1姿勢センサまたは第2姿勢センサにより、チップの姿勢が第1回転角度位置または第2回転角度位置であることを検出することができるので、従来に比して、チップの姿勢を正確に変更することができるという効果が得られる。また、第1姿勢センサおよび第2姿勢センサは、チップ保持部の被検出部に光を照射してその反射光を受光する構成となっているので、第1回転体および第2回転体の外部に設置することができ、配線構造の簡素化を図ることができるという効果も得られる。さらに、チップ保持部の破損やチップの脱落といった障害が生じた場合は、第2回転手段により、第1回転角度位置または第2回転角度位置の前後を回転させても、第1姿勢センサまたは第2姿勢センサで反射光を受光できず被検出部を検出できないことがあるので、障害が生じたことを判定することができるという効果も得られる。
【0048】
一方、発明2の検体液分析装置によれば、チップの姿勢を正確に変更することができるので、測定結果が不十分となる可能性を低減することができるという効果が得られる。
さらに、発明3または4の検体液分析装置によれば、第1回転角度位置、第2回転角度位置および第3回転角度位置を検出することができるので、第1回転角度位置、第2回転角度位置および第3回転角度位置のいずれかにチップの姿勢を正確に変更することができるという効果が得られる。
【0049】
さらに、発明5の検体液分析装置によれば、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて、第2回転手段により、第1回転角度位置、第2回転角度位置および第3回転角度位置のいずれかにチップの姿勢が変更されるので、チップの姿勢をさらに正確に変更することができるという効果が得られる。
さらに、発明6の検体液分析装置によれば、測定回転角度位置において測定センサの測定範囲に測定部が属することとなる回転角度位置にチップの姿勢が変更され、測定回転角度位置まで第1回転体が回転し、測定センサにより測定処理が行われるので、測定処理を行うためにチップの姿勢を手動で変更しなくてもすむという効果が得られる。
【0050】
さらに、発明7の検体液分析装置によれば、第1姿勢センサまたは第2姿勢センサを併用して第1回転体の位置決めを行うことができるので、第1回転体に回転センサを別途設けなくてもすむという効果が得られる。
さらに、発明8の検体液分析装置によれば、チップ保持部の破損やチップの脱落といった障害が生じた場合は、第1遠心分離制御または第2遠心分離制御が禁止されるので、安全性を向上することができるという効果が得られる。
【0051】
さらに、発明9の検体液分析装置によれば、プッシャの直進速度の調整が可能となり、チップの回転時の衝撃を低減することができるという効果が得られる。
さらに、発明10の検体液分析装置によれば、測定センサの移動時にのみ回転駆動手段を駆動すればよいので、発熱を抑えることができ、装置内温度管理を精密に行うことができるという効果が得られる。
【発明を実施するための最良の形態】
【0052】
〔第1の実施の形態〕
以下、本発明の第1の実施の形態を図面を参照しながら説明する。図1ないし図28は、本発明に係る遠心力付与装置および検体液分析装置の第1の実施の形態を示す図である。
本実施の形態は、本発明に係る遠心力付与装置および検体液分析装置を、検体液を遠心分離し分析する場合について適用したものである。
【0053】
まず、検体液分析装置100の概略構成を説明する。
図1は、検体液分析装置100の概略構成を示す斜視図である。
図2は、検体液分析装置100の概略構成を示す平面図である。
検体液分析装置100は、図1(a)、(b)に示すように、中空構造の基台1と、基台1に配設された、マイクロチップ200に遠心力を付与する遠心力付与装置2と、基台1に配設された、マイクロチップ200の測定部200aに対してレーザ光を照射しかつ測定部200aを透過したレーザ光(以下、透過光という。)を受光する光学式測定装置3と、基台1の垂直方向の下部に基台1と内部空間を共有して装着された、装置内の温度を一定となるように調整する温度調整装置4と、基台1の上面部を覆う、上面部に対して外界からの光を遮断する遮光カバー5とを有して構成されている。
【0054】
また、図2に示すように、基台1の上面部を形成するプレート(以下、上部プレートという。)には、その長尺方向を左右方向とし、短尺方向を前後方向とすると、左寄りに遠心力付与装置2が配設され、その右隣に光学式測定装置3が配設されている。さらに、上部プレートの前方側の辺に沿って温度調整用の通風口10(矩形)、16(円形)がそれぞれ設けられ、上部プレートの後方側の辺に沿って温度調整用の通風口11(矩形)、17(矩形)がそれぞれ設けられている。
【0055】
また、基台1の内部に面した上部プレートの下面における通風口10の近傍には、通風口10を覆う矩形のプレートが開閉可能に取り付けられた構成の開閉シャッタ15が設けられており、開閉シャッタ15を開閉させることで、通風口10の開口部の面積を変化させて、基台1の上面部へと流入する空気の通風量を調整することが可能となっている。
さらに、上部プレートには、遠心力付与装置2の後方側に、センサ設置用のプレート12が立設されており、プレート12には、フォトリフレクタ等の反射型の光学式の姿勢センサ13、14が、その検出方向を遠心力付与装置2側に向けて取り付けられている。
【0056】
次に、遠心力付与装置2の構成を説明する。
図3は、遠心力付与装置2の概略構成を示す正面図である。
遠心力付与装置2は、図3に示すように、板面矩形の板状部材から構成される回転アーム20と、回転アーム20の回転軸であるアーム回転軸21と、アーム回転軸21に回転駆動力を付与するアーム回転機構22とを有して構成されている。
【0057】
アーム回転軸21は、上部プレートに設けられた垂直方向の軸穴に軸受(例えば、転がり軸受)を介して挿通され、上部プレートに対して、垂直方向の軸回りに回転可能に支持されている。アーム回転軸21の上端には、その軸心位置と回転アーム20の重心位置とを一致させて回転アーム20が接合され、アーム回転軸21の下端には、アーム回転機構22を構成する回転駆動源の出力軸が連結されている。
【0058】
遠心力付与装置2は、さらに、回転アーム20の長尺方向の一端および他端に貫通して設けられた垂直方向の軸穴に、それぞれ、チップ回転台23の回転軸である回転台回転軸24が、軸受(不図示)を介して垂直方向の軸回りに回転可能にかつ垂直方向に移動不能に貫装されている。回転台回転軸24の上端には、その軸心位置とチップ回転台23の重心位置とを一致させてチップ回転台23が接合されている。また、回転台回転軸24の下端側の一部は、回転台回転軸24を回転駆動する回転台回転機構25のケース内に挿入されている。
【0059】
チップ回転台23上には、マイクロチップ200を保持するチップ保持部26がチップ回転台23とともに回転可能に設けられている。
遠心力付与装置2は、さらに、回転台回転機構25に回転台回転軸24の回転力を発生させるための動力を伝達する回転台駆動力伝達機構27を有して構成されている。
回転台駆動力伝達機構27は、ソレノイドの駆動力によりプッシャ27gを上方へと直進移動させ、回転アーム20の長尺方向と上部プレートの長尺方向とが直交する回転角度位置(以下、姿勢検出回転角度位置という。)に停止している回転台回転機構25の伝達部25cを突き上げることで、回転台回転機構25に上方向の直進運動力を伝達する構成を有している。
【0060】
図4は、遠心力付与装置2の遠心力付与時の回転バランスを均衡させる構成を示す図である。同図(a)は、遠心力付与装置2の平面図であり、同図(b)、(c)は、遠心力付与装置2の正面図である。
遠心力付与装置2は、図4(a)に示すように、回転アーム20の長尺方向の両端における回転アーム20の重心位置に対して左右対称の位置に、チップ回転台23、回転台回転軸24、回転台回転機構25およびチップ保持部26を含むマイクロチップ200の姿勢を変更するチップ回転機構部をそれぞれ設けて構成されている。両方のチップ回転機構部は、同じ重量に調整されている。
【0061】
これにより、遠心力付与装置2は、図4(b)、(c)に示すように、回転アーム20の両端にあるチップ保持部26にマイクロチップ200をそれぞれ装着することで、両端にかかる重量を略同一にすることができ、重量的なバランスを平衡に保つことができる。したがって、回転アーム20をバランスの安定した状態で高速に回転させることができる。
【0062】
また、2つのマイクロチップ200に対して同時に遠心力を付与することができるので、大量のマイクロチップ200に対して効率よく遠心力の付与処理を行うことができる。
なお、2つ同時に遠心力を付与する構成にする必要がないときは、例えば、一方のチップ回転機構部を、他方の分析を行う側のチップ回転機構部と重量を合わせるだけで簡易な構成としてもよい。この場合は、例えば、様々な種類の(例えば、形状は同じで重量は異なる)マイクロチップに適用することを想定するならば、一方のチップ回転機構部には、チップ保持部26だけは設け、チップ保持部26に対して、マイクロチップ200と同じ重量のダミーチップを装着させることで、他方のチップ回転機構部と重量バランスをとる構成とする。また、一定重量のマイクロチップ専用とする場合は、マイクロチップの重さも含んだ重量で一方のチップ回転機構部を構成してもよい。これにより、より簡易な構成とすることができる。
【0063】
これらの構成により、重量バランスを平衡に保つことができるとともに、マイクロチップに対して遠心力の付与を行わない側のチップ回転機構部にかかるコストを低減することができる。
【0064】
次に、アーム回転機構22の構成を説明する。
図5は、アーム回転機構22の構成を示すブロック図である。
アーム回転機構22は、図5に示すように、アーム回転軸21の回転駆動源であるステッピングモータ22aと、ステッピングモータ22aを駆動する駆動回路22bとを有して構成されている。
ステッピングモータ22aは、HB型(Hybrid Type)の2相励磁方式のモータであり、駆動回路22bから供給される相電流によって各極を構成する2つのコイルを順次励磁し、モータ出力軸(回転子)を回転駆動する。
【0065】
ステッピングモータ22aは、さらに、マイクロチップ200の姿勢変更時や光学式測定装置3による測定処理時等において、所定の回転角度位置で停止した状態を保持する保持トルクを発生させるために、保持電流を流す機能を有している。
駆動回路22bは、スイッチング回路から構成され、基台1の内部に配設されたモータ電源(不図示)から電力を得るとともに、基台1の内部に配設された制御基板(後述)から供給される制御信号(パルス信号)に応じて回路をON/OFFし、ONの時に、ステッピングモータ22aの極を構成する2つのコイルに対して回転アーム20の回転に必要な相電流を供給する。
【0066】
また、モータ出力軸(モータ外部に減速機構を有する場合は減速後の出力軸)とアーム回転軸21とはカップリング等により直結されており、モータ出力軸の回転力はアーム回転軸21にダイレクトに伝達される。
以上の構成により、遠心力付与装置2は、ステッピングモータ22aがモータ出力軸を回転駆動して、モータ出力軸の回転力がアーム回転軸21に伝達されると、アーム回転軸21が回転し、この回転に連動して、回転アーム20がその重心位置を回転中心として垂直方向の軸回りに回転する。
なお、遠心力付与装置2は、回転アーム20を時計回り方向に回転して、マイクロチップ200に遠心力を付与するように制御される。
【0067】
次に、マイクロチップ200の構成を説明する。
図6は、マイクロチップ200の形状例を示す図である。
マイクロチップ200は、図6に示すように、平面視すると正方形状となっており、検体液溜め、試薬溜め、秤量部、試薬混合部、測定部200a、遠心分離用および検体液の案内用のマイクロキャピラリ流路等が形成された複数の基板を積層して構成されている。
【0068】
マイクロチップ200は、レーザ光を透過させる特性を有した材料を用いて形成されている。例えば、ポリエチレン(PE)、ポリプロピレン(PP)等のオレフィン樹脂、ポリエチレンテレフタレート(PET)、ポリブチレンテレフタレート(PBT)等のポリエステル樹脂、ナイロン6、ナイロン66等のポリアミド樹脂、塩化ビニル樹脂、フッ素樹脂等の公知の樹脂で形成されている。
測定部200aは、マイクロチップ200の右辺に沿って設けられ、光学式測定装置3において試薬と混合された分離成分に対して測定処理を行うための3つの測定ポイントを有する。
【0069】
次に、チップ保持部26の構成を説明する。
図7は、チップ保持部26の構造例を示す図である。同図(a)は、チップ保持部26の平面図であり、同図(b)は、チップ保持部26の側面図である。
チップ保持部26は、図7(a)、(b)に示すように、マイクロチップ200を内嵌可能な枠部26aを有し、枠部26aの辺上(図7(a)では左辺中央)に、チップ押さえ部26bが設けられた構成となっている。
【0070】
チップ押さえ部26bは、図7(b)に示すように、押さえ部材26b1に矩形の板ばね26b2の長尺方向の一端を支持(例えば、ネジ止め)し、板ばね26b2の長尺方向の他端がチップ回転台23に支持された構造となっている。そして、マイクロチップ200の装着時に、押さえ部材26b1の下端部が、マイクロチップ200の上面の一部を上方から押さえ付けるようになっている。
【0071】
チップ保持部26には、枠部26aの第1辺(図7(a)では後方側の辺右方)の外周面に鍔状の被検出部26cが、枠部26aの第1辺の右隣の第2辺(図7(a)では右辺下方)の外周面に鍔状の被検出部26dが上方向に突出して設けられている。被検出部26c、26dは、光反射特性を有する。
被検出部26c、26dは、姿勢センサ13、14の検出対象であり、姿勢検出回転角度位置に回転アーム20が停止しているときに、姿勢センサ13、14によって検出され、制御基板(後述)において、その検出結果に基づいて、回転アーム20の回転角度位置やマイクロチップ200の姿勢が判定され、回転アーム20の位置決めやマイクロチップ200の姿勢変更等の各種制御が行われる。ここで、マイクロチップ200の姿勢とは、チップ保持部26に保持された状態においてチップ保持部26の回転軸回りの姿勢をいう。
したがって、プレート12は、被検出部26c、26dの高さよりも高く形成されており、姿勢センサ13、14は、被検出部26c、26dと同一の高さに設けられている。
【0072】
次に、姿勢センサ13、14によりマイクロチップ200の姿勢を検出する場合の構成を説明する。
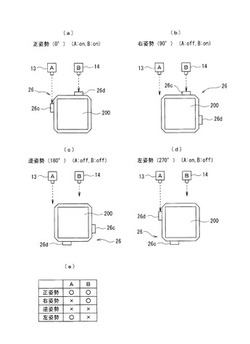
図8は、姿勢センサ13、14の検出動作を示す図である。
マイクロチップ200は、チップ保持部26の回転により、垂直方向の軸回りに0[°]、90[°]、180[°]、270[°]の4つの姿勢をとり得る。以下、それら回転角度位置を、正姿勢回転角度位置、右姿勢回転角度位置、逆姿勢回転角度位置および左姿勢回転角度位置と定義する。
【0073】
姿勢検出回転角度位置においてマイクロチップ200の姿勢が正姿勢回転角度位置(0[°])であるときは、図8(a)に示すように、姿勢センサ13は、被検出部26cにレーザ光を照射しかつその反射光を受光することができるとともに、姿勢センサ14は、被検出部26dにレーザ光を照射しかつその反射光を受光することができる。そのため、姿勢センサ13、14はいずれもONのセンサ信号を出力する。したがって、図8(e)に示すように、姿勢センサ13、14のセンサ信号がいずれもONのときは、マイクロチップ200の姿勢が正姿勢回転角度位置であることを検出することができる。
【0074】
姿勢検出回転角度位置においてマイクロチップ200の姿勢が右姿勢回転角度位置(90[°])であるときは、図8(b)に示すように、姿勢センサ13は、その光軸上に被検出部26c、26dが存在しないため反射光を受光できないが、姿勢センサ14は、被検出部26cにレーザ光を照射しかつその反射光を受光することができる。そのため、姿勢センサ13はOFFのセンサ信号を、姿勢センサ14はONのセンサ信号を出力する。したがって、図8(e)に示すように、姿勢センサ13のセンサ信号がOFFで、姿勢センサ14のセンサ信号がONのときは、マイクロチップ200の姿勢が右姿勢回転角度位置であることを検出することができる。
【0075】
姿勢検出回転角度位置においてマイクロチップ200の姿勢が逆姿勢回転角度位置(180[°])であるときは、図8(c)に示すように、姿勢センサ13、14はいずれも、その光軸上に被検出部26c、26dが存在しないため反射光を受光できない。そのため、姿勢センサ13、14はいずれもOFFのセンサ信号を出力する。したがって、図8(e)に示すように、姿勢センサ13、14のセンサ信号がいずれもOFFのときは、マイクロチップ200の姿勢が逆姿勢回転角度位置であることを検出することができる。
【0076】
姿勢検出回転角度位置においてマイクロチップ200の姿勢が左姿勢回転角度位置(270[°])であるときは、図8(d)に示すように、姿勢センサ13は、被検出部26dにレーザ光を照射しかつその反射光を受光することができるが、姿勢センサ14は、その光軸上に被検出部26c、26dが存在しないため反射光を受光できない。そのため、姿勢センサ13はONのセンサ信号を、姿勢センサ14はOFFのセンサ信号を出力する。したがって、図8(e)に示すように、姿勢センサ13のセンサ信号がONで、姿勢センサ14のセンサ信号がOFFのときは、マイクロチップ200の姿勢が左姿勢回転角度位置であることを検出することができる。
【0077】
次に、マイクロチップ200の装着方法を説明する。
図9は、マイクロチップ200の装着例を示す図である。同図(a)、(b)は、マイクロチップ200およびチップ保持部26の側面図であり、同図(c)は、マイクロチップ200およびチップ保持部26の平面図である。
マイクロチップ200をチップ保持部26に装着するときは、図9(a)に示すように、板ばね26b2を外側に弓なりに弾性変形させ、マイクロチップ200を枠部26aと平行に枠部26aの上部に持っていき、図9(b)に示すように、全体を枠部26aの枠内へと垂直に押し込み、その後、板ばね26b2の弾性変形を解除する。
【0078】
これにより、マイクロチップ200は、図9(c)に示すように、枠部26aの内周に嵌合するとともに、チップ押さえ部26bにより上方から押圧された状態でチップ保持部26に固定される。したがって、マイクロチップ200がどのような回転角度位置にあっても、遠心力の付与中に遠心力によってマイクロチップ200がチップ保持部26から脱離するのを防止でき、かつ、振動等によって浮上方向に力が発生しても、押さえ部材26bによってマイクロチップ200を浮上し難くできる。
【0079】
次に、回転台回転機構25の構成を説明する。
図10は、回転台回転機構25の構成を示す側面図である。
回転台回転機構25は、図10に示すように、チップ回転台23の下方、回転アーム20の下面に固定支持されており、内周が円筒形状のケース内に、回転台回転軸24の一部が上方から挿入された構成となっている。ケースの上面は回転アーム20の下面部で蓋をした構成となっており、ケースの下面部には開口部が設けられている。
【0080】
ケース内には、回転台回転軸24を回転させる円筒形状のカム25aが設けられている。カム25aは、その内周に回転台回転軸24の一部を挿通し、回転台回転軸24に沿って摺動可能に設けられている。
ケース内の壁には、垂直方向に延びる2つのガイド部25bが水平方向に互いに対向する位置に形成されている。
【0081】
次に、カム25aの構成を説明する。
図11は、カム25aの構成を示す図である。同図(a)は、カム25aの正面図であり、同図(b)は、カム25aの底面図である。
カム25aの円筒形状の上端面には、図11(a)に示すように、円周方向に沿って連続して形成された8つの傾斜面25mと、各傾斜面25mの背面を形成する8つの壁25nとからなる上端カム面25jが形成されている。傾斜面25mは、壁25nの上端を傾斜の頂上とし、この頂上から上端面の時計回り方向に向かって下っていく傾斜を有している。
【0082】
カム25aの円筒形状の下端面には、図11(a)、(b)に示すように、円周方向に沿って連続して形成された8つの傾斜面25pと、後述する下側カム用ピン25eを嵌合する8つのピン嵌合溝25qと、各傾斜面25pの背面を形成する8つの壁25rとからなる下端カム面25oが形成されている。傾斜面25pは、図11(b)に示すように、底面側から見て、図中の「山」の部分が傾斜の頂上となり、そこからピン嵌合溝25qの傾斜側の下端位置を傾斜の終わりとして時計回り方向に変位する傾斜を有している。つまり、下端カム面25oは、上下逆さまに見ると、上端カム面25jの傾斜面25mの向きとは逆の傾斜方向の傾斜面25pが形成されている。なお、図11(a)の視点で見ると、図11(b)に示す「山」の部分は、下端カム面25oの最も下方に位置することになる。
【0083】
ピン嵌合溝25qは、各傾斜面25pとその隣の傾斜面25pの背面となる壁25rとの間に、壁25rの壁面に沿って真っ直ぐ上に向かって形成されたストレートの窪みである。
また、上端カム面25jの各傾斜面25mの傾斜角度と、下端カム面25oの各傾斜面25pの傾斜角度とは、上端カム面25jの方が下端カム面25oよりも大きい角度(傾斜が急になる角度)に形成されている。そのため、上端カム面25jの壁25nの高さは、下端カム面25oの壁25rの高さよりも高くなっている。
【0084】
さらに、カム25aは、各傾斜面25mの頂上となる壁25nの頂上の位置と、各傾斜面25pの頂上となる壁25rの頂上の位置とを、それぞれ所定円周角度(例えば、22.5[°])ずつ周方向にずらして配設している。
さらに、図11(a)、(b)に示すように、カム25aの下端部にはその外周に沿って、円環形状の伝達部25cがカム25aと一体に形成されている。伝達部25cは、その径方向に互いに対向する位置に、ケースの内壁に設けられたガイド部25bと係合する2つの係合溝25tが形成されている。また、伝達部25cの径の長さは、ケース内周の径の長さよりもわずかに短い長さ(略同じ長さ)となっている。
【0085】
そして、図10に示すように、カム25aと一体形成された伝達部25cは、ケースの内壁に設けられた2つのガイド部25bを、伝達部25cの2つの係合溝25tにそれぞれ係合して、カム25aおよび伝達部25cがガイド部25bおよび回転台回転軸24に沿って上下方向に摺動可能にケース内に配設されている。つまり、ガイド部25bによって、カム25aおよび伝達部25cを、これらが回転台回転軸24の軸回りに回転するのを防止しながら上下動させることができる。
【0086】
一方、ケース内に挿入された回転台回転軸24の挿入部分の外周面には、上端カム面25jの上方向の移動範囲内の高さ位置に、2本の上側カム用ピン25dが、回転台回転軸24の円周方向に沿って等間隔にかつ同じ高さ位置に設けられている。さらに、ケース内に挿入された回転台回転軸24の挿入部分の外周面には、下端カム面25oの下方向の移動範囲内の高さ位置に、4本の下側カム用ピン25eが、円周方向にそれぞれ等間隔にかつ同じ高さ位置に設けられている。
【0087】
上側カム用ピン25dは、カム25aが最下端の位置にあるときに、少なくともその上端カム面25jの各傾斜面25mと上側カム用ピン25dとが当接しない高さ位置に設けられている。また、下側カム用ピン25eは、カム25aが最上端の位置に移動したときに、少なくともその下端カム面25oの各傾斜面25pと下側カム用ピン25eとが当接しない高さ位置に設けられ、かつカム25aが最下端の位置に移動したときに、下側カム用ピン25eが、下端カム面25oのピン嵌合溝25qに嵌合する高さ位置に設けられている。つまり、カム25aが最下端の位置にあるときは、図11(b)に示すように、4本の下側カム用ピン25eが、ピン嵌合溝25qに嵌合した状態となる。
【0088】
回転台回転機構25は、図10に示すように、さらに、ケース内に、コイルばね25fと、コイルばね25fの伸縮時の回転による両端部の摺動抵抗を小さくするためのリング状の低摺動部材25g(例えば、フッ素樹脂等の樹脂材料によって作製されたリング形状のスペーサ)とが配設されている。
コイルばね25fは、カム25aおよび伝達部25cをケース内に配設する際に、回転台回転軸24の下端側の一部とカム25aとを内側に挿通して、その上端部を回転アーム20の下面に、下端部を伝達部25cの上面に向けた状態でケース内に配設される。
【0089】
また、コイルばね25fは、コイルばね25fの縮み時の捩れ力による回転方向とばね25fの巻き方向とが同じで、かつばね25fの縮んだ状態から復元時の回転方向とばね25fの巻き方向とは逆の方向とが同じ方向となる構造を有している。これにより、コイルばね25fの両端部の摺動抵抗を低減することができ、滑らかな伸縮動作を行うことができる。
【0090】
低摺動部材25gは、コイルばね25fを設ける際に、回転台回転軸24を内側に挿通して、コイルばね25fの上端部と回転アーム20の下面との間と、コイルばね25fの下端部と伝達部25cの上面との間にそれぞれ介装される部材である。低摺動部材25gを介装することにより、コイルばね25fの巻き方向による摺動抵抗の低減に加え、さらにコイルばね25fの両端部の摺動抵抗を低減することができ、より滑らかな伸縮動作を行うことができるようになる。
【0091】
カム25a、上側カム用ピン25d、下側カム用ピン25eおよび回転台回転軸24を形成する部材は、かじりの発生し難くなる材質の組み合わせで構成している。これら部材の材質の組み合わせとしては、例えば、以下の(A)〜(D)に示す4通りのいずれかを採用することができる。
(A)ナイロンで形成したカム25aと、焼き入れしたS45C等の炭素鋼で形成した上側カム用ピン25dおよび下側カム用ピン25eと、鉄で形成した回転台回転軸24との組み合わせ。
【0092】
(B)SUS304等のステンレスで形成したカム25aと、焼き入れしたS45C等の炭素鋼で形成した上側カム用ピン25dおよび下側カム用ピン25eと、鉄で形成した回転台回転軸24との組み合わせ。
(C)SUS304等のステンレスで形成したカム25aと、焼き入れしたS45C等の炭素鋼で形成した上側カム用ピン25dおよび下側カム用ピン25eと、黄銅(真鍮)で形成した回転台回転軸24との組み合わせ。
(D)FC200等の鋳鉄で形成したカム25aと、焼き入れしたS45C等の炭素鋼で形成した上側カム用ピン25dおよび下側カム用ピン25eと、鉄で形成した回転台回転軸24との組み合わせ。
【0093】
つまり、同じ材質の金属同士を摺動させると、両者の親和性が高くなり「かじり(焼付)」が発生しやすくなるので、カム25a、上側カム用ピン25d、下側カム用ピン25eおよび回転台回転軸24の材質を、上記(A)〜(D)のいずれかの組み合わせとすることで、摺動する部品同士による「かじり」の発生を起こし難くすることができる。
【0094】
次に、回転台駆動力伝達機構27の構成を説明する。
図12は、回転台駆動力伝達機構27の構成を示す垂直方向の断面図である。
回転台駆動力伝達機構27は、図12に示すように、ソレノイド本体27aと、ソレノイドシャフト27bと、ショックアブソーバ27cと、ショックアブソーバ27cを基台1に対して固定支持する支持ブラケット27dと、ソレノイドシャフト27bの下端部と結合された衝撃吸収ブラケット27eと、ソレノイドシャフト27bの先端部に取り付けられた緩衝部材27f(例えば、ゴムスポンジ)と、ソレノイドシャフト27bの先端部に連結されたプッシャ27gとを有して構成されている。
【0095】
ソレノイド本体27aは、非磁性材料で形成されたハウジング内に、コイルと、コイル内に挿入された固定鉄心と、固定鉄心と磁気的に接続されていてコイルを囲む磁性材製の磁気フレームと、ハウジング内に固定鉄心に対して接近および離間移動可能に設けられた可動鉄心とを有して構成されている。
ソレノイドシャフト27bは、ソレノイド本体27aの可動鉄心に設けられた貫通孔に挿通して可動鉄心に対して軸方向に相対移動不能に取り付けられた構成となっている。したがって、コイルに通電して磁束を発生させると、この磁束が可動鉄心を磁化して、可動鉄心を固定鉄心側に引き寄せ、可動鉄心に取り付けられたソレノイドシャフト27bが可動鉄心とともに引き寄せられる。つまり、ソレノイド本体27aの磁気吸引力により、ソレノイドシャフト27bを直進運動させる。
【0096】
回転台駆動力伝達機構27は、基台1の内部に、ソレノイドシャフト27bの先端が、上部プレートに対して直交する方向に上方向を向けて配設されており、ソレノイド本体27aによる磁気吸引力によってソレノイドシャフト27bを上方向に直進運動させ、その先端部に連結されたプッシャ27gによって、この直進運動力を伝達部25cに伝達する。
【0097】
ソレノイドシャフト27bは、力の伝達体であり、その上端側にプッシャ27gが、その下端側に衝撃吸収ブラケット27eが結合されており、ソレノイド本体27aの駆動により、ソレノイドシャフト27bが上方向に直進移動すると、これとともにプッシャ27gおよび衝撃吸収ブラケット27eも上方向に直進移動する。
ショックアブソーバ27cは、シリンダと、シリンダに設けられたロッド穴に挿通されたピストンロッドと、ピストンロッドの後端部が固着され、シリンダ内に往復動可能に設けられたピストン部と、ピストン部の後端部に一端が支持され、他端がシリンダ内後端部に支持された戻り用のコイルばねとを有して構成されている。
【0098】
ショックアブソーバ27cは、さらに、支持ブラケット27dを介して、ピストンロッドの先端を衝撃吸収ブラケット27eに向けた状態で基台1に固定支持されている。
ピストン部は、その周囲をOリング等のリング状のシール部材でシールされており、シリンダ内を移動時に自己の周囲とシリンダ内壁との間を液体が通り抜けるのを防止している。なお、ロッド穴についても外部に液体が漏れないようにOリング等のシール部材でシールしている。
【0099】
ピストン部には、その往復動の方向に常時開通される貫通穴と、ピストン部の移動方向に応じて開通される弁付貫通穴とが設けられている。
弁付貫通穴は、ピストン部がシリンダ内部方向に移動するときに弁を開いて貫通穴内を液体が通り抜けられる状態にし、シリンダ内部方向とは逆方向に移動するときに弁を閉じて液体が通り抜けられない状態にする構造となっている。
【0100】
これにより、ピストン部がシリンダ内部方向に移動するときは、常時開通している貫通穴と弁付貫通穴とを、シリンダ内に封入された液体を通り抜けさせながら移動し、液体が両貫通穴を通り抜けるときの抵抗力によってピストンロッドに加えられた衝撃を吸収する。
また、ピストンロッドのシリンダ内部方向への移動によってピストン部がシリンダ内を移動すると、その力を受けて戻り用のコイルばねが縮む。そして、ピストンロッドに加わる力がなくなると、コイルばねの復元力によって、ピストン部が逆方向へと押され、これにより弁付貫通穴の弁が閉じるので、ピストン部は、常時開通している貫通穴のみに液体を通り抜けさせながらシリンダ内を移動し、ピストンロッドおよびピストン部を初期位置へと復帰させる。
【0101】
衝撃吸収ブラケット27eは、ソレノイドシャフト27bの上方向への直進移動とともに、基台1側に固定支持されたショックアブソーバ27cのピストンロッドの先端に向かって直進移動し、かつピストンロッドの先端に衝突するように構成されている。
ソレノイドシャフト27bの先端部には、緩衝部材27fが取り付けられており、プッシャ27gが伝達部25cに衝突したときに、その衝突による衝撃を吸収する。
【0102】
プッシャ27gは、その先端部に円筒形状の凸部が形成されており、突き上げ動作時には、円筒形状の凸部における円環状の上端面が伝達部25cの円環状の下面と当接して伝達部25cを突き上げる。これにより、伝達部25cと一体形成されたカム25aに上方向の直進移動力を伝達する。また、プッシャ27gは、その先端部の外径が伝達部25cの径と同じまたは略同じ大きさで構成され、内径が少なくとも回転台回転軸24の径より大きく構成されている。
【0103】
以上の構成により、ソレノイドシャフト27bが直進移動すると、衝撃吸収ブラケット27eがピストンロッドの先端部に衝突し、この衝突力によってピストン部が貫通穴に液体を通しながらシリンダ内を移動する。このときの抵抗力によって、衝突による衝撃が吸収され、ソレノイドシャフト27bは、衝撃の吸収された状態で、ソレノイドシャフト27bを上方向に直進移動させて、その先端のプッシャ27gを、伝達部25cに衝突させる。このとき、緩衝部材27fによって衝突時の衝撃が緩和される。また、プッシャ27gの先端部における凸部の内側に形成される窪みによって、突き上げ動作時に、窪み内に回転台回転軸24の下端部を逃がすことができ、プッシャ27gと回転台回転軸24の下端部とを接触させずに、伝達部25cに力を伝達することができる。
【0104】
また、姿勢検出回転角度位置で回転アーム20を停止させたときの、上部プレートにおける、回転アーム20の後端側の回転台回転機構25のケース下面に形成された開口部の真下の位置には、プッシャ27gが往復動可能な径の貫通穴が設けられている。この貫通穴は、回転台回転軸24の軸心を円の中心とした円筒形状を有している。そして、回転台駆動力伝達機構27は、プッシャ27gの中心と貫通穴の中心とを一致させた状態でプッシャ27gを貫通穴に挿通して、上部プレートにおける姿勢検出回転角度位置の下面側に配設されている。なお、ソレノイドシャフト27bおよびプッシャ27gは、ソレノイド本体27aの停止時の初期位置において、プッシャ27gの全体が、姿勢検出回転角度位置に設けられた貫通穴内に収まるように配設されている。
【0105】
図13は、プッシャ27gで突き上げ時の回転台回転機構25の動作を示す図である。
上記構成によって、回転アーム20が姿勢検出回転角度位置で停止した状態において、制御基板(後述)からの制御信号が入力されると、回転台駆動力伝達機構27は、制御信号に応じてソレノイド本体27aを駆動する。これにより、ソレノイドシャフト27bが上方向に直進移動し、その上端部に連結されたプッシャ27gを上方向に移動させる。このとき、ショックアブソーバ27cのピストンロッドに衝撃吸収ブラケット27eが衝突し、ソレノイドシャフト27bの直進移動時の衝撃が一部吸収される。ソレノイドシャフト27bは、ショックアブソーバ27cにおいて衝撃が吸収された状態で、上部プレートに設けられた貫通穴を通り、回転台回転機構25のケース下面の開口部を通って、伝達部25cの下面部へと到達する。
【0106】
一方、回転台回転機構25は、図13(a)に示すように、4本の下側カム用ピン25eが下端カム面25oのピン嵌合溝25qにそれぞれ嵌合した状態となっている。すなわち、カム25aは伝達部25cとともに最下端に位置した状態となっている。
この状態において、ソレノイドシャフト27bの直進移動により、プッシャ27gの円環状の凸部端面が、伝達部25cの円環状の下面に上方向に向かって衝突すると、その突き上げ力が伝達部25cと一体形成されたカム25aに伝達され、図13(b)に示すように、ガイド部25bに沿って、伝達部25cとともにカム25aを、回転させることなく回転台回転軸24に沿って上方向へと直進移動させる。この直進移動によって、2本の上側カム用ピン25dが、上端カム面25jに形成された8つの傾斜面25mのうち対応する2つの傾斜面25mにそれぞれ当接する。一方、プッシャ27gが伝達部25cに衝突したときの衝撃は、ソレノイドシャフト27bの先端部に取り付けられた緩衝部材27fによって緩和される。
【0107】
また、図13(b)に示すように、カム25aの上方向への直進移動によって、回転アーム20と伝達部25cとの間に介装されたコイルばね25fがその力を受けて縮む。
引き続き、図13(b)に示す状態から、カム25aが上方向に移動すると、図13(c)に示すように、カム25aから上側カム用ピン25dへと伝達された上方向の力によって、上側カム用ピン25dが、上端カム面25jに形成された傾斜面25mに沿ってその当接位置から傾斜の麓方向に向かって摺動する。つまり、カム25aの上方向への直進移動力は、上端カム面25jの傾斜面25mによって、上側カム用ピン25dの回転駆動力、すなわち回転台回転軸24の回転駆動力へと変換される。これにより、回転台回転軸24は、時計回り方向に回転する。
【0108】
図14は、プッシャ27gで突き上げ後の回転台回転機構25の動作を示す図である。
回転台回転軸24は、図14(a)に示すように、傾斜面25mに沿って移動する上側カム用ピン25dが、隣の傾斜面25mの背面を形成する壁25nに衝突するまで回転し、壁25nに衝突して移動を停止するとそこで回転を停止する。つまり、カム25aの突き上げ動作時においては、上側カム用ピン25dが傾斜面25mに当接してから摺動して壁25nに衝突して停止するまでの移動距離に応じた回転角度だけ回転台回転軸24が時計回り方向に回転する。これにより、チップ回転台23およびチップ保持部26が時計回り方向に回転する。
【0109】
なお、本実施の形態において、回転台回転軸24の外周面に、上側カム用ピン25dの代わりにカムフォロアを用いたり、上側カム用ピン25dにベアリングを設けたりすることで、摺動時の抵抗を低くし、より回転しやすくすることも可能である。
一方、上側カム用ピン25dが壁25nに衝突している状態のとき(傾斜の付け根部分に位置するとき)に、回転台駆動力伝達機構27において、ソレノイド本体27aの駆動を停止すると、回転台回転機構25においては、プッシャ27gの突き上げ力が除去されるため、カム25aの上方向の移動によって縮んでいたコイルばね25fの復元力によって、カム25aが伝達部25cとともに、図14(b)に示すように、ガイド部25bに沿って、回転することなく下方向へと直進移動する。
【0110】
このとき、回転台回転軸24は、突き上げ時の回転によって、初期状態ではピン嵌合溝25qに嵌合していた4本の下側カム用ピン25eも時計回り方向に位置がずれているため、カム25aの下方向への直進移動によって、4本の下側カム用ピン25eが、下端カム面25oに形成された8つの傾斜面25pのうちの対応する4つにそれぞれ当接する。
また、ソレノイドシャフト27bは、プッシャ27gが、コイルばね25fの復元力で下方向に移動する伝達部25cに押されるため、この力と自重とによって下方向に移動する。
【0111】
引き続き、コイルばね25fの復元力によって、図14(b)に示す状態から、さらにカム25aが下方向に移動すると、図14(c)に示すように、カム25aから下側カム用ピン25eへと伝達された下方向の力によって、下側カム用ピン25eが、下端カム面25oを構成する傾斜面25pに沿ってその当接位置から傾斜の麓方向(ピン嵌合溝25qに向かって登る方向)に向かって移動する。つまり、カム25aの下方向への直進移動力は、傾斜面25pによって、下側カム用ピン25eの回転駆動力、すなわち回転台回転軸24の回転駆動力へと変換され、回転台回転軸24を時計回り方向に回転させる。これにより、チップ回転台23およびチップ保持部26が時計回りに回転し、チップ保持部26に保持されたマイクロチップの回転角度位置をさらに変更する。
【0112】
そして、下側カム用ピン25eは、ピン嵌合溝25qを形成する壁に衝突するまで回転し、壁に衝突するとそこで回転を停止する。カム25aは、壁に衝突した後も下方向に移動し、下側カム用ピン25eは、壁に沿って移動してピン嵌合溝25qに嵌合する。下側カム用ピン25eがピン嵌合溝25qに嵌合することによってカム25aの下方向の移動も停止する。これにより、回転台回転軸24は、下側カム用ピン25eが傾斜面25pに接触してからピン嵌合溝25qの壁に衝突するまでの移動距離に応じた回転角度だけ時計回り方向に回転することになる。
【0113】
なお、本実施の形態において、回転台回転軸24の外周面に、下側カム用ピン25eの代わりにカムフォロアを設けたり、下側カム用ピン25eにベアリングを設けたりすることで、摺動時の抵抗を低くし、より回転しやすくすることも可能である。
このようにして、遠心力付与装置2は、回転台駆動力伝達機構27の突き上げ動作によって、回転台回転軸24を時計回り方向に回転させることでチップ保持部26に保持されたマイクロチップ200の姿勢を変更することができる。
【0114】
また、下端カム面25oを構成する傾斜面25pの傾斜方向を回転台回転軸24を時計回りに回転させる方向(右下から左上に延びる傾斜)とし、さらに遠心力の付与時における回転アーム20の回転方向を時計回り方向としたので、回転アーム20を時計回り方向に高速回転させたときに、下側カム用ピン25eには、ピン嵌合溝25qを形成する壁に向かって押し付けられる方向に力が加わる。これにより、回転アーム20を回転させて遠心力を付与した時に、遠心力によって回転台回転軸24が回転してしまうのを防止することができるので、マイクロチップ200の姿勢がずれて不適切な方向に遠心力が加わるのを防止することができる。
【0115】
また、カム25aを、上端カム面25jの傾斜面25mの傾斜角度が、下端カム面25oの傾斜面25pの傾斜角度よりも急角度となるように両者を構成したので、上側カム用ピン25dを傾斜面25mに沿って摺動させるときに必要な力を、下側カム用ピン25eを傾斜面25pに沿って摺動させるときに必要な力よりも小さくできる。
ショックアブソーバ27cによる制動によって、突き上げ時にカム25aにかかる力よりも、コイルばね25fの復元力によってカム25aにかかる力の方が大きくなるため、傾斜面25mの傾斜角度を傾斜面25pよりも急角度にすることで上側カム用ピン25dの摺動に必要な力を小さくしている。
【0116】
一方、カム25aが下方向に移動時は、突き上げ時よりも大きな力が加わることから、傾斜面25mほどの傾斜角度がなくても、下側カム用ピン25eを傾斜面25pに沿って摺動させることができるので、傾斜面25pの傾斜角度を傾斜面25mの傾斜角度よりも小さくして、その分、背面を形成する壁の高さを壁25nよりも低く構成している。
つまり、壁の高さ(傾斜の頂点位置)を低くできることから、カム25aの高さをその分だけ低く構成することができる。さらに壁の高さを低くした分だけ、ソレノイドシャフト27bのストローク距離を短くすることができるので、傾斜面25mの背面を形成する壁25nの高さと、傾斜面25pの背面を形成する壁25rの高さとを同じにした場合と比較して、回転台駆動力伝達機構27を小型化することができる。
【0117】
また、カム25aを、その円筒形状の上端に上端カム面25jを、下端に下端カム面25oを設けた構成としたので、いずれか一方だけにカム面を設けた構成のものよりも、ソレノイドシャフト27bのストローク距離を短くすることができる。例えば、上端だけにカム面を設けた構成では、傾斜面の傾斜の長さが倍になると、ソレノイドシャフト27bのストローク距離が倍になり、ソレノイドシャフト27bを長くする等の装置の大型化につながる措置が必要となる。
【0118】
また、回転台回転機構25と回転台駆動力伝達機構27とを別体とし、回転台回転軸24に沿ったカム25aの上下動によって、回転台駆動力伝達機構27の突き上げ力を回転台回転軸24の回転力へと変換する構成としたので、回転台回転軸24を回転させるのに、回転台回転軸24を上下動させる必要がないため、チップ回転台23およびチップ保持部26を上下動させずにその場で回転させることができる。これにより、チップ回転台23、回転台回転軸24およびチップ保持部26を上下動させる構造にしなくてもすむ(固定支持できる)ので、例えば、アーム回転軸21の回転がアンバランスとなって、これらの構成部に上方向の力が加わっても、構成部が浮上することを防止することができる。
【0119】
次に、光学式測定装置3の構成を説明する。
図15は、光学式測定装置3の構成を示す図である。同図(a)は、光学式測定装置3の平面図であり、同図(b)、(c)は、光学式測定装置3の側面図である。
光学式測定装置3は、図15(a)〜(c)に示すように、センサヘッド30と、スライドレール32と、スライドレール33と、スライダ34と、スライダ35と、スライド補助部材36とを有して構成されている。
【0120】
スライドレール32、33は、直線形状のスライドレールであり、姿勢検出回転角度位置に対して時計回り方向に90°回転した回転角度位置(以下、測定回転角度位置という。)で回転アーム20が停止しているときに、チップ回転機構部の停止位置に対して、チップ回転機構部の右隣に、前後方向に所定距離を空けて両者が平行に基台1に固定支持されている。
【0121】
さらに、スライドレール32、33には、そのレール部に沿って摺動可能にスライダ34、35が装着されている。スライダ34、35は、スライドレール32、33の上方にセンサヘッド30が配されるように、高さ方向に伸びた取付部分を有している。この取付部分を介して、スライダ34、35が、センサヘッド30に固着されている。そして、スライダ34、35をレール部に沿って往復動させることで、センサヘッド30を、チップ回転機構部に対して接近および離間する方向に直進移動させる。なお、スライドレール32、33は、センサヘッド30をチップ回転機構部に最も接近させたときに、チップ保持部26に保持されたマイクロチップ200に対して測定処理が行える位置に設けられている。
【0122】
スライド補助部材36は、2本の角柱部材36a、36bの一端同士を結合(例えば、ネジ止め)したL字形状を有しており、L字を上下逆さまにした下方側角柱部材36bの他端部が、上方側角柱部材36aがスライドレール32、33の間を通ってこれらと平行にかつ上方側角柱部材36aが上部プレートよりも高い位置に配されるように基台1に固定支持されている。これにより、上方側角柱部材36aは、その他端部をセンサヘッド30を接近させる方向に真っ直ぐに向けた状態で基台1に固定支持される。
【0123】
センサヘッド30は、自己に固着されたスライダ34、35をスライドレール32、33に対してそれぞれレール部に沿って摺動可能に装着するとともに、自己に設けられた嵌合口に上方側角柱部材36aを、上方側角柱部材36aに沿って自己を摺動可能に嵌合させることで上部プレート上に配されている。
したがって、スライダ34、35がレール部に沿ってスライドすると、センサヘッド30もスライド部および上方側角柱部材36aに沿って、スライダ34、35と同じ移動方向にスライドする。
【0124】
なお、スライドレール32、33によるスライド移動機構およびスライド補助部材36によって、センサヘッド30の接近および離間移動時の上下動を抑えることができ、センサヘッド30を基台1の上面と平行に保ちながらチップ回転機構部に対して接近および離間する方向に確実に直進移動させることができる。これにより、チップ保持部260とセンサヘッド30との位置決めを精度よく行うことができ、測定回転角度位置においてチップ保持部26にセンサヘッド30が当接する位置(以下、測定処理位置という。)への正確な移動に対する再現性を確保することができる。
【0125】
光学式測定装置3は、さらに、心棒37と、戻り用ばね部38と、ソレノイド39と、ソレノイドシャフト40と、伝達部材41とを有して構成されている。
心棒37は、戻り用ばね部38のコイルばね38a、38bの心棒であり、先端部にばねのストッパを有し、上方側角柱部材36aの下方に、上方側角柱部材36aの長尺方向の直線と心棒37の長尺方向の直線とが平行となるように、後端部が下方側角柱部材36bに固定支持されている。
【0126】
戻り用ばね部38は、コイルばね38a、38bと、リング形状の連結部材38cとを有して構成されている。
2本のコイルばね38a、38bは、連結部材38cを介して連結され、この連結された2本のばねの内側に、下方側角柱部材36bに固定支持された心棒37が挿通されている。また、心棒37の先端にはストッパが設けられており、このストッパによってばねの抜けを防止する。さらに、連結部材38cは、心棒37に沿って摺動可能に設けられており、外力を受けると、コイルばね38a、38bを伸縮させながら心棒37に沿って移動する。
【0127】
ソレノイド39は、回転台駆動力伝達機構27のソレノイドと同様の構成となっており、内部のコイルを通電することで磁束を発生して可動鉄心を磁化し、この磁力によって可動鉄心を固定鉄心側に引き寄せることで、可動鉄心をセンサヘッド30のスライド方向と同じ方向に直進移動させる(直進運動力を発生させる)。
ソレノイドシャフト40は、ソレノイド39の可動鉄心に設けられた貫通孔に挿通して可動鉄心に対して軸方向に相対移動不能に取り付けられ、ソレノイド39のコイルの通電により発生した磁気吸引力によって可動鉄心とともに直進移動する。
【0128】
伝達部材41は、ソレノイドシャフト40の先端部、連結部材38c、センサヘッド30の結合部(不図示)とそれぞれ同じ直線上で結合され、ソレノイドシャフト40の直進移動力を、戻り用ばね部38およびセンサヘッド30に略同時に伝達する。
【0129】
図16は、センサヘッド30のスライド移動動作の一例を示す図である。
上記構成により、光学式測定装置3は、図16(a)に示すように、ソレノイド39が駆動して、ソレノイドシャフト40を直進移動させると、この直進移動力は、伝達部材41および連結部材38cを介してコイルばね38a、38bに伝達されるとともに、センサヘッド30の結合部を介してセンサヘッド30に伝達される。これにより、図16(b)に示すように、連結部材38cを介して伝達された直進移動力によって、コイルばね38aが縮むとともにコイルばね38bが伸びる。一方、センサヘッド30の結合部を介して伝達された直進移動力によって、スライダ34、35がセンサヘッド30とともに、スライドレール32、33のレール部に沿ってチップ回転機構部に接近する。
【0130】
また、図16(b)に示す状態で、ソレノイド39の駆動を停止して、センサヘッド30の結合部および連結部材38cから接近方向への直進移動力を除去すると、コイルばね38a、38bの復元力によってセンサヘッド30がチップ回転機構部から離間する方向に直進移動力が発生し、センサヘッド30をスライドレール32、33のレール部に沿って離間方向へと直進移動させる。これにより、センサヘッド30は、コイルばね38a、38bが伸縮した状態から元の長さに戻るまでの距離を離間方向に移動する。
【0131】
次に、センサヘッド30の構成を説明する。
図17は、センサヘッド30の構成を示す図である。同図(a)、(b)は、測定処理位置に移動時のセンサヘッド30の平面図であり、同図(c)は、受光ヘッド30fの平面図であり、同図(d)、(e)は、測定処理位置に移動時のセンサヘッド30の側面図である。
【0132】
センサヘッド30は、図17(a)、(b)に示すように、ナイロン等の樹脂部材(絶縁部材)から形成された、略ユ字形状の発光ヘッド30aおよび受光ヘッド30fを有し、両者を互いの形状が重なる位置で垂直方向に対向させて、発光ヘッド30aを受光ヘッド30fの上方に配設した構成となっている。
発光ヘッド30aには、その略ユ字形状の窪みを挟んで前後に位置する部位のうち、後方側の部位の左端に3つの発光素子が前後方向に一直線状に配列された構成のレーザ発光部30b(図中の丸で囲った部分(上側))が設けられている。
【0133】
発光ヘッド30aには、さらに、その略ユ字形状の窪みを挟んで前後に位置する部位のうち、前方側の部位の左寄りに、レーザ発光部30bの配列方向と直交する方向に3つの発光素子が一直線上に配列された構成のレーザ発光部30c(図中の丸で囲った部分(下側))が設けられている。
レーザ発光部30b、30cの各発光素子は、一端にレーザ光の入力口を、他端にレーザ光の照射口を有し、発光素子ごとに、発光ヘッド30aに垂直方向に形成された貫通穴の内部に配設されている。レーザ光の入力口は貫通穴の上側に向け、レーザ光の照射口は貫通穴の下側に向けて配設されている。
【0134】
レーザ発光部30b、30cは、入力口および照射口の形成された両端を除く各発光素子の周囲が絶縁部材で囲まれた構成となっている。
レーザ光の入力口側には、レーザ光の伝達路である光ファイバ(不図示)が接続されている。そして、レーザ発光部30b、30cは、基台1の内部に配設されたレーザ光源(例えば、半導体レーザ)からのレーザ光が、光ファイバを介してレーザ発光部30b、30cの入力口から入力されると、入力されたレーザ光を照射口から照射する。
【0135】
なお、レーザ発光部30b、30cは、照射するレーザ光の波長がそれぞれ異なるように構成されている。この場合、レーザ光の波長を調整可能に構成されていてもよい。
レーザ光の波長は、例えば、検体液が血液であれば、700〜1200[nm]の範囲(近赤外光の範囲)で設定する。これにより、例えば、遠心分離されかつ吸光度成分を有する試薬と混合された血漿成分に対して、波長が異なるレーザ光を照射した場合に、その透過光または反射光から、血中における、酸素化ヘモグロビン量、脱酸素化ヘモグロビン量、総ヘモグロビン量、酸素化ミオグロビン量、脱酸素化ミオグロビン量、総ミオグロビン量等を測定することができる。
【0136】
レーザ発光部30b、30cを構成する各発光素子は、図17(a)、(b)に示すように、その照射口の中心が、マイクロチップ200の測定部200aの3つの測定ポイントの中心と同じ間隔で配設されており、センサヘッド30が測定処理位置でかつマイクロチップ200の姿勢が正姿勢回転角度位置であるときは、測定部200aの測定ポイントと、レーザ発光部30bの発光素子とは垂直方向に対向する位置関係となるように配設されている。また、センサヘッド30が測定処理位置でかつマイクロチップ200の姿勢が右姿勢回転角度位置であるときは、測定部200aの測定ポイントと、レーザ発光部30cの発光素子とは垂直方向に対向する位置関係となるように配設されている。
【0137】
つまり、測定回転角度位置においてセンサヘッド30が測定処理位置にある場合に、マイクロチップ200の姿勢が正姿勢回転角度位置であるときは、図17(a)に示すように、レーザ発光部30bの3つの照射口が測定部200aの3つの測定ポイントとそれぞれ垂直方向に対向し、マイクロチップ200の姿勢が右姿勢回転角度位置であるときは、図17(b)に示すように、レーザ発光部30cの3つの照射口が測定部200aの3つの測定ポイントとそれぞれ垂直方向に対向する。
【0138】
一方、受光ヘッド30fには、図17(c)に示すように、その略ユ字形状の窪みを挟んで前後に位置する部位のうち、後方側の部位の左端に、3つの受光素子が前後方向に一直線状に配列された構成のレーザ受光部30g(図中の丸で囲った部分(上側))が設けられている。
受光ヘッド30fには、さらに、その略ユ字形状の窪みを挟んで前後に位置する部位のうち、前方側の部位の左寄りに、レーザ受光部30gの配列方向と直交する方向に3つの受光素子が一直線上に配列された構成のレーザ受光部30h(図中の丸で囲った部分(下側))が設けられている。
【0139】
具体的には、レーザ発光部30b、30cの各発光素子と垂直方向に対向する位置に各受光素子が設けられている。
レーザ受光部30g、30hの各受光素子は、フォトダイオード等の受光素子から構成されており、一端に透過光の受光部を、他端に受光した光の光量に応じた電気信号の出力部を有し、受光素子ごとに、受光ヘッド30fに垂直方向に形成された貫通穴の内部に配設されている。受光部は貫通穴の上側に向け、出力部は貫通穴の下側に向けて配設されている。
【0140】
レーザ受光部30g、30hは、受光部および出力部の形成された両端を除く各受光素子の周囲が絶縁部材で囲まれた構成となっている。
出力部には、信号線(不図示)が接続されている。そして、レーザ受光部30g、30hは、信号線を介して受光部からのセンサ信号を制御基板(後述)に伝達する。
センサヘッド30は、さらに、図17(a)、(b)に示すように、測定処理位置に移動したときに、水平方向に対向するチップ保持部26の外周部における右辺後方側の角部に角部の傾斜に合わせた傾斜面を接触してマイクロチップ200の位置とセンサヘッド30との位置を固定する支持部材30dと、同じく水平方向に対向するチップ保持部26の外周部における右辺前方側の角部に角部の傾斜に合わせた傾斜面を接触して支持部材30dとともにマイクロチップ200の位置とセンサヘッド30との位置を固定する支持部材30eとを有している。
【0141】
発光ヘッド30aおよび受光ヘッド30fは、図17(d)、(e)に示すように、両者を互いに同じ形状位置で隙間を空けて垂直方向に対向させ、後端側において支持部材30dが、前端側において支持部材30eが、発光ヘッド30aおよび受光ヘッド30fを挟持することで、隙間を保持した状態で両者を固定支持する構成となっている。
ここで、上記隙間は、測定処理時において、チップ保持部26に保持されたマイクロチップ200における測定部200aの上側に発光素子を、下側に受光素子を位置させるために設けたものであり、測定処理時には、チップ保持部26に保持されたマイクロチップ200をチップ保持部26ごと挟みこむようになっている。そのため、発光ヘッド30aと受光ヘッド30fとの間には、少なくとも、チップ保持部26に保持されたマイクロチップ200と、チップ保持部26と、チップ回転台23とが形成する垂直方向の厚み以上の隙間が形成されている。
【0142】
また、センサヘッド30には、回転アーム20の中心から径方向にみてチップ保持部26の左遠端の角部の位置に合わせて支持部材30dが、チップ保持部26の右遠端の角部の位置に合わせて支持部材30eが取り付けられており、センサヘッド30をチップ回転機構部に接近させたときに、支持部材30eの各傾斜面がチップ保持部26の各角部を押さえ付け、これによりチップ保持部26を正確な測定処理位置に固定支持する。
【0143】
また、発光ヘッド30aおよび受光ヘッド30fに形成された略ユ字形状の窪みの部分は、図17(a)、(b)に示すように、センサヘッド30を測定処理位置に移動時に、チップ保持部26に形成された被検出部26c、26dとセンサヘッド30との接触を回避させる役割を果たす。つまり、センサヘッド30をチップ回転機構部に接近させたときに、被検出部26c、26dがセンサヘッド30に接触することなく窪み内に進入し、測定処理位置に到達時において窪み内において停止する。
【0144】
上記構成により、測定回転角度位置に回転アーム20が停止しているときに、センサヘッド30を測定処理位置まで接近させると、発光ヘッド30aと受光ヘッド30fとの間に形成された隙間に、マイクロチップ200の装着されたチップ保持部26およびチップ回転台23の一部が挟み込まれるとともに、支持部材30d、30eの各傾斜面がチップ保持部26の角部と当接し、支持部材30d、30eが、ソレノイド39から伝達された力によってチップ保持部26の角部を押さえ付ける。これにより、チップ保持部26とセンサヘッド30とが測定処理位置に正確に固定支持される。
【0145】
センサヘッド30は、さらに、制御基板(後述)による制御により、マイクロチップ200の姿勢が正姿勢回転角度位置であるときに、レーザ発光部30bによって測定部200aにレーザ光を照射し、マイクロチップ200の姿勢が右姿勢回転角度位置であるときに、レーザ発光部30cによって測定部200aにレーザ光を照射するように構成されている。
【0146】
したがって、レーザ発光部30bの3つの照射口から照射されたレーザ光は、測定部200aの3つの測定ポイントを透過して、レーザ受光部30gの3つの受光部で受光され、レーザ発光部30cの3つの照射口から照射されたレーザ光は、測定部200aの3つの測定ポイントを透過して、レーザ受光部30hの3つの受光部で受光される。
このような構成であれば、遠心力付与装置2において、マイクロチップ200の姿勢を90°変更するだけで、測定回転角度位置に停止したマイクロチップ200に対して、波長が異なる2種類のレーザ光による測定処理を行うことができる。なお、マイクロチップ200のレーザ発光部30b、30cに対応する位置にそれぞれ測定部を設けることで、同時に2箇所の測定部に対して測定処理を行う構成とすることもできる。
【0147】
図18は、黒色の絶縁部材を用いて形成されたセンサヘッド30の一例を示す図である。
センサヘッド30は、さらに、図18(a)〜(c)に示すように、発光ヘッド30aと受光ヘッド30fの略ユ字形状のボディを形成する部材にレーザ光を吸収する機能を有する光吸収部材を用いている。
【0148】
光吸収部材は、発光ヘッド30aと受光ヘッド30fのボディを形成する部材に、近赤外領域(波長:780〜3000nm)に波長をもつ光を吸収する性質の機能性色素を添加することで生成することができる。
例えば、樹脂材料中に、以下の顔料、あるいは色素を添加することにより、レーザ光を吸収することが可能である。例えば、セラミックブラック、酸化鉄(無機顔料)、カーボンブラック、ボーンブラック(有機顔料)等の黒色顔料、クロムエロー、セラミックエロー、ジンククロメートエロー(無機顔料)、ニッケルアゾグリーンエロー(有機顔料)等の黄色顔料、ハイドロクロムオキサイドグリーン、クロムグリーン(無機顔料)、クロミウムオキサイドダルグリーン、フタロシアニングリーン(有機顔料)等の緑色顔料、色素としては黒色顔料、シアニン系色素、フタロシアニン系、チオールニッケル錯体系、インドフェノール金属錯体系、ナフトキノン系、アゾ系、トリアゾールメタン系、分子間型CT色素等の色素を使用することができる。
【0149】
具体的に、発光ヘッド30aと受光ヘッド30fのボディを形成するナイロン等の絶縁体の樹脂材料に、セラミックブラック等の黒色顔料を添加して、光吸収機能を付加している。この光吸収機能によって、発光ヘッド30aの各発光素子から照射されたレーザ光の散乱光は、発光ヘッド30aと受光ヘッド30fのボディ表面で殆ど反射されずに吸収されるため、反射光による誤動作の発生等を低減することができる。
【0150】
なお、発光ヘッド30aと受光ヘッド30fだけではなく、支持部材30d、30eについても、これらの材料に光吸収機能を付加することが可能である。これにより、支持部材30d、30eからの反射光も低減することができるので、レーザ光の散乱光による誤作動の発生等をより低減することができる。
また、先述したように、発光ヘッド30aと受光ヘッド30fとは、絶縁体で形成されているので、発光ヘッド30aに設けられた発光素子同士の電気的な干渉を低減することができる。これにより、電気的干渉によるレーザ光への不具合(波長の変化等)の発生を低減することができる。
【0151】
さらに、受光ヘッド30fに設けられた複数の受光素子を形成する金属部材にノイズが乗るのを防止しまたはノイズが乗る量を低減することもできる。これにより、ノイズによる測定結果の誤差の発生を防止しまたは誤差量を低減することができる。
【0152】
次に、温度調整装置4の構成を説明する。
図19は、温度調整装置4の内部構成を示す図である。
温度調整装置4は、図19に示すように、筐体54と、筐体54の側部に設けられた調温部50と、筐体54の内部に設けられ、筐体54内部の温度を測定する温度センサ51と、ファン52と、電気エネルギを熱に変換する発熱体53と、受光ヘッド30fの近傍に配設された温度センサ55とを有して構成されている。
調温部50は、温度センサ51、55から入力された電圧値に基づいて筐体54の内部の温度および受光ヘッド30fの近傍の温度をそれぞれ測定する温度測定部と、温度測定部の測定温度に応じて発熱体53の発熱量を制御する発熱量制御部とを有して構成されている。
【0153】
通常は、受光素子から安定したセンサ信号を得るために、温度センサ55からの入力に基づいて受光ヘッド30fの近傍の温度を一定に保つように発熱量を制御する。一方、温度センサ51からの入力によって、筐体54の内部の温度が著しく上昇したと判定されたとき等に、発熱体53への電気エネルギの供給を停止する等の特別な制御を行う。
温度センサ51、55は、熱電対から構成されており、それぞれ配設位置近傍の温度差に応じた電圧信号を調温部50に出力する。
【0154】
ファン52は、モータによって駆動する送風用のファンであり、発熱体53の近傍に、発熱体53に向かって風を吹き付ける方向に向けて配設されている。なお、調温部50において、発熱体53の発熱量だけでなく、ファン52の回転数等も制御して、温度制御を行う構成とすることも可能である。
発熱体53は、抵抗発熱体等の電気エネルギを熱に変換する部材から構成されており、調温部50から供給される電気エネルギを熱に変換し、この熱によって筐体54の内部の空気を暖める。
【0155】
図20は、検体液分析装置100の内部における空気の流れの一例を示す図である。
温度調整装置4によって、調温部50が電気エネルギを発熱体53に供給すると、発熱体53において電気エネルギが熱に変換され、この熱によって筐体54の内部の空気が暖められる。一方、ファン52は常に一定の回転速度で回転しており、発熱体53の発熱によって暖められた空気は、ファン52の発生する風によって、図20に示すように、基台1の内部を通って上部プレートへと向かって上方に移動する。
【0156】
図21は、基台1の上面部における空気の流れの一例を示す図である。
そして、図21に示すように、上部プレートの下面に到達した空気は、上部プレートに設けられた通風口10を通って、基台1の上面部と遮光カバー5とから形成される空間内へと流入する。また、空間内に流入した空気は、遠心力付与装置2および光学式測定装置3の周辺の空気を暖めるとともに、通風口11を通って基台1内部へと移動し、基台1内部を通って筐体54の内部へと戻ることで検体液分析装置100の内部を循環する。
【0157】
このようにして、温度調整装置4で発生した暖かい空気を適宜循環させることで、基台1の上面部と遮光カバー5とから形成される空間内の温度を暖めるとともに、空間内の温度を一定に保つことができるので、マイクロチップ200内の検体液溜めに注入された検体液や試薬の温度を一定に保つことができる。さらに、受光ヘッド30fにおける、受光素子の温度変化に対する特性変化が原因で発生する誤差をなくすまたは低減することができる。
【0158】
また、通風口10に対して開閉シャッタ15が設けられており、開閉シャッタ15の開閉量を調整することで通風口10の開口部の大きさを調整し、基台1の上面部と遮光カバー5とから形成される空間内への暖められた空気の流入量を調整することができる。
【0159】
次に、制御基板300の構成を説明する。
図22は、制御基板300の構成を示すブロック図である。
制御基板300は、図22に示すように、制御プログラムに基づいて演算およびシステム全体を制御するCPU302と、所定領域にあらかじめCPU302の制御プログラム等を格納しているROM304と、ROM304等から読み出したデータやCPU302の演算過程で必要な演算結果を格納するためのRAM306と、外部装置に対してデータの入出力を媒介する駆動指令出力I/F308、センサ入力I/F310および通信I/F312とで構成されており、これらは、データを転送するための信号線であるバスで相互にかつデータ授受可能に接続されている。
【0160】
駆動指令出力I/F308には、駆動回路22bと、回転台駆動力伝達機構27のソレノイド28と、ソレノイド39とが接続されている。したがって、CPU302は、駆動指令出力I/F308を介して駆動回路22bおよびソレノイド28、39に制御信号を出力する。
センサ入力I/F310には、姿勢センサ13、14と、レーザ発光部30bおよびレーザ受光部30gからなる測定センサ31aと、レーザ発光部30cおよびレーザ受光部30hからなる測定センサ31bとが接続されている。したがって、CPU302は、センサ入力I/F310を介して姿勢センサ13、14および測定センサ31a、31bからセンサ信号を入力する。
【0161】
通信I/F312には、外部コンピュータ(不図示)が接続されている。したがって、CPU302は、通信I/F312を介して外部コンピュータと通信を行う。
CPU302は、ROM304等の所定領域に格納されている制御プログラムを起動させ、その制御プログラムに従って、図23ないし図25のフローチャートに示すチップセット処理、モータ原点確定処理および検体液分析処理を実行する。
【0162】
初めに、チップセット処理を説明する。
図23は、チップセット処理を示すフローチャートである。
チップセット処理は、マイクロチップ200をチップ保持部26に装着した場合に測定可能であるか否かを確認する処理であって、CPU302において実行されると、図23に示すように、まず、ステップS100に移行する。
【0163】
ステップS100では、遮光カバー5に設けられた開閉センサ(不図示)からのセンサ信号に基づいて遮光カバー5が開放されているか否かを判定し、遮光カバー5が開放されていないと判定したとき(No)は、ステップS102に移行する。
ステップS102では、各種センサ13、14、31a、31b等が安全であることを示す安全サインを出力しているか否かを判定し、安全サインを出力していると判定したとき(Yes)は、ステップS104に移行する。
【0164】
ステップS104では、駆動回路22bからALC信号を入力し、ALC信号を入力してから所定時間(例えば、10[ms]以上)待機し、ステップS106に移行して、入力したALC信号に基づいてALCが正常であるか否かを判定し、ALCが正常であると判定したとき(Yes)は、ステップS108に移行する。
ステップS108では、マイクロチップ200の装着が完了し測定が可能である旨のメッセージを液晶ディスプレイ等の表示装置(不図示)に表示し、一連の処理を終了して元の処理に復帰させる。
【0165】
一方、ステップS106で、ACLが正常でないと判定したとき(No)は、ステップS104に移行する。
一方、ステップS102で、各種センサ13、14、31a、31b等が安全サインを出力しないと判定したとき(No)は、ステップS110に移行して、ソレノイド28、39の位置を確認すべき旨のエラーメッセージを表示装置に表示し、ステップS102に移行する。
【0166】
一方、ステップS100で、遮光カバー5が開放されていると判定したとき(Yes)は、ステップS112に移行して、マイクロチップ200を装着し遮光カバー5を閉じるべき旨のエラーメッセージを表示装置に表示し、ステップS100に移行する。
【0167】
次に、モータ原点確定処理を説明する。
図24は、モータ原点確定処理を示すフローチャートである。
モータ原点確定処理は、ステッピングモータ22aおよびソレノイド39を駆動し、原点が確定できるか否かを確認する処理であって、CPU302において実行されると、図24に示すように、まず、ステップS200に移行する。
ステップS200では、遮光カバー5に設けられた開閉センサからのセンサ信号に基づいて遮光カバー5が開放されているか否かを判定し、遮光カバー5が開放されていないと判定したとき(No)は、ステップS202に移行する。
【0168】
ステップS202では、各種センサ13、14、31a、31b等が安全であることを示す安全サインを出力しているか否かを判定し、安全サインを出力していると判定したとき(Yes)は、ステップS204に移行する。
ステップS204では、駆動回路22bからALC信号を入力し、ALC信号を入力してから所定時間(例えば、10[ms]以上)待機し、ステップS206に移行して、入力したALC信号に基づいてALCが正常であるか否かを判定し、ALCが正常であると判定したとき(Yes)は、ステップS208に移行する。
【0169】
ステップS208では、ステッピングモータ22aを低速で回転させることを示す制御信号を駆動回路22bに出力し、ステップS210に移行して、姿勢センサ13または姿勢センサ14からONのセンサ信号を入力したか否かを判定することにより姿勢センサ13、14で被検出部26c、26dを検出したか否かを判定し、姿勢センサ13、14で被検出部26c、26dを検出したと判定したとき(Yes)は、姿勢検出回転角度位置に回転アーム20が位置しているので、ステップS212に移行して、ステッピングモータ22aを停止させることを示す制御信号を駆動回路22bに出力し、ステップS214に移行する。
【0170】
ステップS214では、姿勢検出回転角度位置に停止している回転アーム20を測定回転角度位置まで回転させるため、ステッピングモータ22aを90[°]回転させることを示す制御信号を駆動回路22bに出力し、ステップS216に移行して、ステッピングモータ22aのサーボをOFFにすることを示す制御信号を駆動回路22bに出力し、ステップS218に移行する。
【0171】
ステップS218では、チップ保持部26に保持されたマイクロチップ200にセンサヘッド30を当接させて測定可能な状態に移行できるか否かを確認するため、センサヘッド30を測定処理位置まで接近させることを示す制御信号をソレノイド39に出力し、ステップS220に移行する。
ステップS220では、ステッピングモータ22aのサーボをONにすることを示す制御信号を駆動回路22bに出力し、ステップS222に移行して、原点が確定できた旨のメッセージを表示装置に表示し、一連の処理を終了して元の処理に復帰させる。
【0172】
一方、ステップS210で、姿勢センサ13、14で被検出部26c、26dを検出できないと判定したとき(No)は、姿勢検出回転角度位置に回転アーム20が位置していないので、ステップS208に移行する。
一方、ステップS206で、ACLが正常でないと判定したとき(No)は、ステップS204に移行する。
【0173】
一方、ステップS202で、各種センサ13、14、31a、31b等が安全サインを出力しないと判定したとき(No)は、ステップS224に移行して、ソレノイド28、39の位置を確認すべき旨のエラーメッセージを表示装置に表示し、ステップS202に移行する。
一方、ステップS200で、遮光カバー5が開放されていると判定したとき(Yes)は、ステップS226に移行して、遮光カバー5を閉じるべき旨のエラーメッセージを表示装置に表示し、ステップS200に移行する。
【0174】
次に、検体液分析処理を説明する。
図25は、検体液分析処理を示すフローチャートである。
検体液分析処理は、チップ保持部26に保持されたマイクロチップ200に遠心力を付与することにより、検体液の成分を分離し、分離後の成分と試薬とを混合し、試薬混合後の成分を分析する処理であって、CPU302において実行されると、図25に示すように、まず、ステップS300に移行する。
【0175】
ステップS300では、ステッピングモータ22aを第1駆動パターンで回転させることを示す制御信号を駆動回路22bに出力する。駆動パターンとは、駆動速度プロフィールに基づいて駆動されるステッピングモータ22aの動作パターンをいう。駆動速度プロフィールは、ステッピングモータ22aの加速、減速、定常速度または停止のパターンを示すものであり、例えば、ステッピングモータ22aのトップスピードをどれぐらいに設定するか、加速や減速の度合いをどれぐらいに設定するかといった内容が規定されている。
【0176】
次いで、ステップS302に移行して、ステッピングモータ22aを第2駆動パターンで回転させることを示す制御信号を駆動回路22bに出力し、ステップS304に移行して、ステッピングモータ22aが停止したか否かを判定し、停止したと判定したとき(Yes)は、ステップS306に移行するが、そうでないと判定したとき(No)は、ステッピングモータ22aが停止するまでステップS304で待機する。
【0177】
次に、ステップS306〜S316の処理を説明する。ステップS306〜S316の処理は、姿勢検出回転角度位置まで回転アーム20を回転させるための仮原点移動処理である。
ステップS306では、ステッピングモータ22aを低速で回転させることを示す制御信号を駆動回路22bに出力し、ステップS308に移行して、姿勢センサ13または姿勢センサ14からONのセンサ信号を入力したか否かを判定することにより姿勢センサ13、14で被検出部26c、26dを検出したか否かを判定し、姿勢センサ13、14で被検出部26c、26dを検出したと判定したとき(Yes)は、姿勢検出回転角度位置に回転アーム20が位置しているので、ステップS310に移行して、ステッピングモータ22aを停止させることを示す制御信号を駆動回路22bに出力し、ステップS318に移行する。
【0178】
一方、ステップS308で、姿勢センサ13、14で被検出部26c、26dを検出できないと判定したとき(No)は、姿勢検出回転角度位置に回転アーム20が位置していないので、ステップS312に移行して、ステップS306で制御信号を出力してから回転アーム20が1回転するのに十分な所定時間が経過したか否かを判定し、所定時間が経過したと判定したとき(Yes)は、ステップS314に移行する。
【0179】
ステップS314では、チップ保持部26の破損やマイクロチップ200の脱落といった障害が発生した旨のエラーメッセージを表示装置に表示し、ステップS316に移行して、制御を中断し、一連の処理を終了して元の処理に復帰させる。
一方、ステップS312で、所定時間が経過しないと判定したとき(No)は、ステップS306に移行する。
【0180】
次に、ステップS318〜S324の処理を説明する。ステップS318〜S324の処理は、姿勢検出回転角度位置においてマイクロチップ200の姿勢を変更する姿勢変更処理である。
ステップS318では、プッシャ27gを上昇させることを示す制御信号をソレノイド28に出力し、ステップS320に移行して、プッシャ27gを下降させることを示す制御信号をソレノイド28に出力する。ステップS318、S320の1回の処理により、チップ回転台23およびチップ保持部26は、45[°]回転する。これに伴って、マイクロチップ200もチップ保持部26と一体に[°]45回転する。
【0181】
次いで、ステップS322に移行して、ステップS318、S320の処理を2回実行したか否かを判定し、2回実行したと判定したとき(Yes)は、ステップS324に移行する。
ステップS324では、姿勢センサ13または姿勢センサ14からのセンサ信号に基づいて、マイクロチップ200の姿勢が適切に90[°]回転したか否かを判定する。チップ回転台23およびチップ保持部26は、回転台駆動力伝達機構27の構造から時計回りに回転するため、回転前の姿勢センサ13、14からのセンサ信号と、回転後の姿勢センサ13、14からのセンサ信号とを対比し、その対比結果に基づいて、回転前後で位相が90[°]進んでいるか否かを判定する。例えば、マイクロチップ200の回転前の姿勢が正姿勢回転角度位置である場合は、回転後は、右姿勢回転角度位置となっているはずなので、回転後の姿勢センサ13、14からのセンサ信号に基づいて右姿勢回転角度位置でないと判定したときは、マイクロチップ200の姿勢が適切に90[°]回転していないと判定される。この場合は、回転中に、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じたと判定することができる。これに対し、右姿勢回転角度位置であると判定したときは、マイクロチップ200の姿勢が適切に90[°]回転したと判定される。
【0182】
ステップS324の結果、マイクロチップ200の姿勢が適切に90[°]回転したと判定したとき(Yes)は、ステップS326に移行するが、そうでないと判定したとき(No)は、ステップS314に移行する。
一方、ステップS322で、ステップS318、S320の処理を2回実行していないと判定したとき(No)は、ステップS318に移行する。
【0183】
一方、ステップS326では、ステッピングモータ22aを第3駆動パターンで回転させることを示す制御信号を駆動回路22bに出力し、ステップS328に移行して、ステッピングモータ22aを第4駆動パターンで回転させることを示す制御信号を駆動回路22bに出力し、ステップS330に移行する。
ステップS330では、ステッピングモータ22aを第5駆動パターンで回転させることを示す制御信号を駆動回路22bに出力し、ステップS332に移行して、ステッピングモータ22aを第6駆動パターンで回転させることを示す制御信号を駆動回路22bに出力し、ステップS334に移行する。
【0184】
ステップS334では、ステップS330、S332の処理を27回実行したか否かを判定し、27回実行したと判定したとき(Yes)は、ステップS336に移行する。
ステップS336では、ステッピングモータ22aを第7駆動パターンで回転させることを示す制御信号を駆動回路22bに出力し、ステップS338に移行して、ステップS306〜S316と同様の仮原点移動処理を実行し、ステップS340に移行する。
【0185】
ステップS340では、姿勢検出回転角度位置に停止している回転アーム20を測定回転角度位置まで回転させるため、ステッピングモータ22aを90[°]回転させることを示す制御信号を駆動回路22bに出力し、ステップS342に移行する。
ステップS342では、マイクロチップ200の測定部200aに対して1回目の測定処理を行う第1測定処理を実行する。第1測定処理では、センサヘッド30を測定処理位置まで接近させることを示す制御信号をソレノイド39に出力し、測定実行を示す制御信号を測定センサ31aに出力し、測定センサ31aからセンサ信号を入力し、センサヘッド30を測定処理位置から離間させることを示す制御信号をソレノイド39に出力する。
【0186】
次いで、ステップS344に移行して、入力したセンサ信号を示す第1測定結果データを外部コンピュータに出力し、ステップS346に移行して、ステップS306〜S316と同様の仮原点移動処理を実行し、ステップS348に移行して、ステップS318〜S324と同様の姿勢変更処理を実行し、ステップS350に移行する。
ステップS350では、姿勢検出回転角度位置に停止している回転アーム20を測定回転角度位置まで回転させるため、ステッピングモータ22aを90[°]回転させることを示す制御信号を駆動回路22bに出力し、ステップS352に移行する。
【0187】
ステップS352では、マイクロチップ200の測定部200aに対して2回目の測定処理を行う第2測定処理を実行する。第2測定処理では、センサヘッド30を測定処理位置まで接近させることを示す制御信号をソレノイド39に出力し、測定実行を示す制御信号を測定センサ31bに出力し、測定センサ31bからセンサ信号を入力し、センサヘッド30を測定処理位置から離間させることを示す制御信号をソレノイド39に出力する。
【0188】
次いで、ステップS354に移行して、入力したセンサ信号を示す第2測定結果データを外部コンピュータに出力し、ステップS356に移行して、測定が完了した旨のメッセージを表示装置に表示し、一連の処理を終了して元の処理に復帰させる。
一方、ステップS334で、ステップS330、S332の処理を27回実行していないと判定したとき(No)は、ステップS330に移行する。
【0189】
次に、本実施の形態の動作を説明する。
以下、測定対象の検体液を血液とし、血液分析用のマイクロチップ200を用いて、血液の吸光度測定を行う場合の検体液分析装置100の実際の動作を説明する。
血液分析用のマイクロチップ200には、少なくとも、測定対象者から採血した血液を溜める血液溜め、試薬を溜める3つの試薬溜め、第1遠心方向(マイクロチップ200の姿勢が左姿勢回転角度位置であるときの回転アーム20の長手方向外向きの方向)への遠心力の付与に応じて血液溜めの血液を血球成分と血漿成分とに遠心分離する構造を有したマイクロキャピラリ流路(例えば、U字状のマイクロキャピラリ流路)から形成される遠心分離部、第2遠心方向(マイクロチップ200の姿勢が正姿勢回転角度位置であるときの回転アーム20の長手方向外向きの方向)への遠心力の付与に応じて血漿成分を秤量する秤量部、秤量された血漿成分と試薬溜めの試薬とを混合する混合部、および試薬の混合された血漿成分に対して吸光度測定を行う3つの測定ポイントを有する測定部200aが形成されている。また、秤量部は、血漿成分を秤量して3つの測定対象成分を得られるように構成されており、混合部は、この3つの測定対象成分と試薬とを混合する。なお、混合する試薬は、通常、測定対象や測定内容に応じて異なり、3つの測定対象成分に対して同じ種類の試薬を混合する場合や、異なる試薬を混合する場合がある。ここでは、吸光度測定を行うので、測定対象に吸光機能を付加する試薬を3つの試薬溜めに溜めておく。
【0190】
また、検体液分析装置100は、制御基板300が制御プログラムを実行することで、各制御対象への制御信号を生成し、生成した制御信号によって各制御対象を制御して、(1)血液(全血)の遠心分離、(2)遠心分離後の分離成分(血漿)の秤量、分離成分と試薬との混合および試薬の混合された分離成分の測定部への移動、(3)測定部へと移動した分離成分に対する第1波長のレーザ光の照射および各透過光の受光、(4)第1波長による測定結果である第1測定結果データの外部コンピュータへの出力、(5)測定部へと移動した分離成分に対する第2波長のレーザ光の照射および各透過光の受光、(6)第2波長による測定結果である第2測定結果データの外部コンピュータへの出力、の6つの工程を自動的に行うようになっている。
【0191】
検体液分析装置100の電源を投入すると、まず、温度調整装置4が駆動し、調温部50からの電気エネルギの供給によって、発熱体53が発熱して周囲の空気を暖めるとともに、ファン52が駆動して、暖められた空気を基台1の内部へと送り込む。基台1の内部へと送り込まれた空気は、通風口10を通って、基台1の上面部と遮光カバー5とから形成される空間内へと流れ込み、空間内の温度を上昇させる。
【0192】
また、調温部50は、センサヘッド30の近傍に配設された温度センサ55からの入力電圧によって、空間内における受光ヘッド30fの近傍の温度を測定し、測定温度が設定温度に近づくようにかつ一定に保たれるように、発熱体53への供給電力量を調整する。
一方、マイクロチップ200に形成された血液溜めには、測定対象者の血液(例えば、20[μl])が注入される。血液溜めに血液の注入されたマイクロチップ200は、回転アーム20の一端にあるチップ保持部26に装着される。このとき、マイクロチップ200の姿勢は、左姿勢回転角度位置とする。なお、回転アーム20の他端にあるチップ保持部26には、未使用のマイクロチップ200(またはダミーチップ)を装着し、両端の重量バランスを均衡させる。
【0193】
図26は、遠心力付与時の動作を示す図である。
マイクロチップ200がチップ保持部26に装着され、開始ボタン(不図示)が押下されると、まず、ステップS300〜S304を経て、第1遠心分離制御を含む工程(1)が行われる。
工程(1)が開始されると、制御基板300において、駆動回路22bに供給する制御信号が生成され、生成された制御信号が駆動回路22bに供給される。駆動回路22bは、供給された制御信号に基づいてスイッチング回路のON/OFFを切り換え、ステッピングモータ22aに相電流を供給する。この相電流の供給によって、ステッピングモータ22aが回転駆動し、この回転駆動力は、アーム回転軸21へと伝達され、アーム回転軸21を回転させる。アーム回転軸21が回転すると、アーム回転軸21が結合された回転アーム20が、図26(a)に示すように、時計回りに回転する。ここでは、注入された血液(全血)を血球成分と血漿成分とに分離するのに十分な回転速度(例えば、3000[回/1分])および回転時間(例えば、15分間)で回転アーム20を高速回転させる。この回転によって第1遠心方向に遠心力が付与される。そして、回転アーム20を必要な時間分回転させると、工程(1)が完了し、マイクロチップ200の血液溜めに注入された全血は、血球成分と血漿成分とに遠心分離される。
【0194】
工程(1)が完了すると、引き続き、ステップS306〜S336を経て、第2遠心分離制御を含む工程(2)が行われる。
工程(2)が開始されると、制御基板300からの制御信号に応じて、まず、アーム回転機構22が駆動し、測定対象のマイクロチップ200が保持されたチップ保持部26が、図26(b)に示すように、姿勢検出回転角度位置で停止するように、姿勢検出回転角度位置まで回転アーム20を回転させ、その位置に停止させる。
【0195】
回転アーム20の回転角度位置の検出は、姿勢センサ13によって被検出部26dを検出することで行う。このとき、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じた場合は、姿勢センサ13、14の検出結果によっては姿勢検出回転角度位置を判定することができないので、ステップS316を経て、制御が中断される。
工程(2)においては、第2遠心方向に遠心力を付与する必要があるため、マイクロチップ200の姿勢を変更する。
【0196】
制御基板300は、まず、マイクロチップ200の姿勢を変更するために、回転台駆動力伝達機構27に制御信号を出力し、ソレノイド本体27aを駆動させて、ソレノイドシャフト27bをショックアブソーバ27cで衝撃を緩和させながら上方向に直進移動させ、プッシャ27gと垂直方向に対向する伝達部25cをプッシャ27gによって突き上げる。これにより、伝達部25cと一体形成されたカム25aが回転台回転軸24に沿って突き上げられる。
【0197】
カム25aが突き上げられると、上端カム面25jと、上側カム用ピン25dとによって、突き上げ力が回転台回転軸24の回転力へと変換され、回転台回転軸24が時計回りに回転する。その後、ソレノイド本体27aの駆動を停止すると、回転台回転機構25では、コイルばね25fの復元力によって、カム25aが回転台回転軸24に沿って下方向に直進移動し、下端カム面25oと、下側カム用ピン25eとによって、カム25aの下方向の移動力が回転台回転軸24の回転力へと変換され、回転台回転軸24がさらに時計回りに回転する。
【0198】
図27は、マイクロチップ200の姿勢変更時の動作を示す図である。
ここでは、カム25aの1回の上下方向の移動によって、回転台回転軸24を、時計回りに45[°]回転させるように、上端カム面25jの傾斜面25mおよび下端カム面25oの傾斜面25pが適宜の傾斜角度および数で構成され、上側カム用ピン25dおよび下側カム用ピン25eが適宜の数で構成されている。
【0199】
したがって、図27(a)に示すように、1回の突き上げ動作(カム25aの上下動)による回転台回転軸24の回転によって、チップ回転台23およびチップ保持部26を時計回りに45[°]回転する。すなわち、マイクロチップ200の姿勢を時計回りに45[°]回転させた姿勢へと変更する。
マイクロチップ200を第2遠心方向に向けるには、マイクロチップ200の姿勢を正姿勢回転角度位置にする必要があるので、突き上げ動作を同じ手順でもう1回行って、マイクロチップ200の姿勢をさらに時計回りに45[°]回転させた姿勢へと変更する。
【0200】
これにより、マイクロチップ200は、図27(b)に示すように、第1遠心方向に対応する図26(b)に示す姿勢に対して、時計回りに90[°]回転した姿勢となる。
マイクロチップ200の姿勢の検出は、姿勢センサ13、14によって被検出部26c、26dを検出することで行う。このとき、マイクロチップ200の姿勢が正姿勢回転角度位置であると、姿勢センサ13により、照射された光が被検出部26cで反射し、その反射光を受光することができるとともに、姿勢センサ14により、照射された光が被検出部26dで反射し、その反射光を受光することができるので、マイクロチップ200の姿勢が正姿勢回転角度位置であることを検出することができる。また、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じた場合は、姿勢センサ13、14の検出結果によっては、マイクロチップ200の姿勢が適切に90[°]回転したことを判定することができないので、ステップS316を経て、制御が中断される。
【0201】
マイクロチップ200の姿勢が正姿勢回転角度位置になると、制御基板300は、アーム回転機構22に制御信号を出力して、アーム回転機構22を駆動し、遠心分離後の血漿成分を秤量するのに十分な回転速度および回転時間で回転アーム20を高速回転させる。この回転によって第2遠心方向に遠心力が付与される。そして、回転アーム20を必要な時間分回転させると、工程(2)が完了し、血漿成分が秤量され3つの測定対象の血漿成分が3つの秤量部に溜まり、秤量された3箇所の血漿成分と3箇所の試薬溜めの試薬とがそれぞれ混合され、混合後の各血漿成分が測定部200aの3つの測定ポイントにおけるそれぞれ対応したポイントへと移動する。
【0202】
図28は、光学式測定装置3の測定処理時の動作を示す図である。
工程(2)が完了すると、引き続き、ステップS338〜S342を経て、第1測定処理を含む工程(3)が行われる。
工程(3)が開始されると、制御基板300は、測定部200aをセンサヘッド30と対向させるため、アーム回転機構22を駆動して、図28(a)に示すように、姿勢検出回転角度位置から時計回りに90[°]回転させた測定回転角度位置まで回転アーム20を回転させ、その位置に停止させる。
【0203】
回転アーム20が測定回転角度位置に停止すると、制御基板300は、ソレノイド39に対してソレノイド39を駆動する制御信号を出力する。これにより、ソレノイド39が駆動して、ソレノイドシャフト40が直進移動し、自己に結合された伝達部材41を直進移動させる。伝達部材41は、ソレノイドシャフト40の直進運動力を、連結部材38cを介して、戻り用ばね部38およびセンサヘッド30に略同時に伝達する。これにより、センサヘッド30の結合部を介して伝達された直進運動力によって、スライダ34、35の固着されたセンサヘッド30が、図28(b)に示すように、上方側角柱部材36a、スライドレール32、33のレール部に沿ってマイクロチップ200の保持されたチップ保持部26のある方向(左方向)に直進移動する。センサヘッド30は、支持部材30d、30eがチップ保持部26の角部に当接するまで直進移動する。そして、支持部材30d、30eによってチップ保持部26の角部を押さえ付けることで、測定処理位置においてチップ保持部26とセンサヘッド30との位置決めが行われかつその位置が固定支持される。
【0204】
センサヘッド30が測定処理位置に移動すると、制御基板300は、測定センサ31aに対して制御信号を出力して、レーザ発光部30bを駆動し、第1波長のレーザ光を3つの発光素子から、これらと垂直方向に対向する測定部200aの3つの測定ポイントに向けて照射する。照射された第1波長のレーザ光は、3つの測定ポイントにそれぞれ存在する試薬混合後の血漿成分を透過し、透過光がレーザ受光部30gの3つの受光素子で受光される。そして、この受光された透過光の光量に応じたセンサ信号が信号線を介して制御基板300へと出力される。さらに、制御基板300の制御によってソレノイド39がオフにされ、工程(3)が完了する。ソレノイド39がオフにされると、コイルばね38a、38bの復元力によってセンサヘッド30がチップ回転機構部から離間し、初期位置へと復帰する。
【0205】
工程(3)が完了すると、引き続き、ステップS344を経て、工程(4)が行われる。
工程(4)が開始されると、制御基板300は、受光素子からのセンサ信号を示す第1測定結果データを外部コンピュータへと出力して、工程(4)が完了する。
工程(4)が完了すると、引き続き、ステップS346〜S352を経て、第2測定処理を含む工程(5)が行われる。
【0206】
工程(5)が開始されると、制御基板300は、アーム回転機構22を駆動して、図27(b)に示すように、測定回転角度位置から反時計回りに90[°]回転させた姿勢検出回転角度位置まで回転アーム20を回転させ、その位置に停止させる。
回転アーム20の回転角度位置の検出は、姿勢センサ13、14によって被検出部26c、26dを検出することで行う。このとき、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じた場合は、姿勢センサ13、14の検出結果によっては姿勢検出回転角度位置を判定することができないので、ステップS316を経て、制御が中断される。
【0207】
さらに、制御基板300は、回転台駆動力伝達機構27を駆動して、突き上げ動作を2回行い、マイクロチップ200の姿勢を、現在の正姿勢回転角度位置から時計回りに90[°]回転させた右姿勢回転角度位置に変更する。
マイクロチップ200の姿勢の検出は、姿勢センサ13、14によって被検出部26c、26dを検出することで行う。このとき、マイクロチップ200の姿勢が右姿勢回転角度位置であると、姿勢センサ14により、照射された光が被検出部26cで反射し、その反射光を受光することができるが、姿勢センサ13では反射光を受光できないので、マイクロチップ200の姿勢が右姿勢回転角度位置であることを検出することができる。また、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じた場合は、姿勢センサ13、14の検出結果によっては、マイクロチップ200の姿勢が適切に90[°]回転したことを判定することができないので、ステップS316を経て、制御が中断される。
【0208】
次に、制御基板300は、測定部200aをセンサヘッド30と対向させるため、アーム回転機構22を駆動して、図28(c)に示すように、姿勢検出回転角度位置から時計回りに90[°]回転させた測定回転角度位置まで回転アーム20を回転させ、その位置に停止させる。
回転アーム20が測定回転角度位置に停止すると、制御基板300は、工程(3)と同様に、センサヘッド30を移動して、支持部材30d、30eによって、測定処理位置においてチップ保持部26とセンサヘッド30との位置決めが行われかつその位置が固定支持される。
【0209】
センサヘッド30が測定処理位置に移動すると、制御基板300は、測定センサ31bに対して制御信号を出力して、レーザ発光部30cを駆動し、第1波長とは異なる第2波長のレーザ光を3つの発光素子から、これらと垂直方向に対向する測定部200aの3つの測定ポイントに向けて照射する。照射された第2波長のレーザ光は、3つの測定ポイントにそれぞれ存在する試薬混合後の血漿成分を透過し、透過光がレーザ受光部30hの3つの受光素子で受光される。そして、この受光された透過光の光量に応じたセンサ信号が信号線を介して制御基板300へと出力される。さらに、制御基板300の制御によってソレノイド39がオフにされ、工程(5)が完了する。ソレノイド39がオフにされると、コイルばね38a、38bの復元力によってセンサヘッド30がチップ回転機構部から離間し、初期位置へと復帰する。
【0210】
工程(5)が完了すると、引き続き、ステップS354を経て、工程(6)が行われる。
工程(6)が開始されると、制御基板300は、受光素子からのセンサ信号を示す第2測定結果データを外部コンピュータへと出力して、工程(6)が完了する。
外部コンピュータでは、制御基板300からの第1測定結果データおよび第2測定結果データに基づいて、血漿中の酸素化ヘモグロビン量、脱酸素化ヘモグロビン量、総ヘモグロビン量等を分析する。
【0211】
このようにして、本実施の形態では、垂直方向の軸回りに回転可能な回転アーム20と、回転アーム20を回転させるアーム回転機構22と、マイクロチップ200を保持するためのチップ保持部26と、回転アーム20におけるその回転中心から離れた位置に設けられ、垂直方向の軸回りにチップ保持部26を回転可能なチップ回転台23と、チップ回転台23を回転させる回転台回転機構25と、測定回転角度位置においてチップ保持部26に保持されたマイクロチップ200の測定部200aにレーザ光を照射しかつその透過光を受光可能な測定センサ31a、31bと、チップ保持部26に設けられ、光反射特性を有する被検出部26cと、姿勢検出回転角度位置においてマイクロチップ200の姿勢が正姿勢回転角度位置であるときに被検出部26cにレーザ光を照射しかつその反射光を受光可能な姿勢センサ13と、姿勢検出回転角度位置においてマイクロチップ200の姿勢が右姿勢回転角度位置であるときに被検出部26cにレーザ光を照射しかつその反射光を受光可能な姿勢センサ14とを備え、左姿勢回転角度位置でマイクロチップ200の姿勢を保持しアーム回転機構22により回転を行う第1遠心分離制御、および正姿勢回転角度位置でマイクロチップ200の姿勢を保持しアーム回転機構22により回転を行う第2遠心分離制御を行う。
【0212】
これにより、姿勢センサ13、14により、マイクロチップ200の姿勢が正姿勢回転角度位置または右姿勢回転角度位置であることを検出することができるので、従来に比して、マイクロチップ200の姿勢を正確に変更することができる。また、姿勢センサ13、14は、チップ保持部26の被検出部26cにレーザ光を照射してその反射光を受光する構成となっているので、回転アーム20およびチップ回転台23の外部に設置することができ、配線構造の簡素化を図ることができる。さらに、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じた場合は、回転台回転機構25により、正姿勢回転角度位置または右姿勢回転角度位置の前後を回転させても、姿勢センサ13、14で反射光を受光できず被検出部26cを検出できないことがあるので、障害が生じたことを判定することができる。さらに、マイクロチップ200の姿勢を正確に変更することができるので、測定結果が不十分となる可能性を低減することができる。
【0213】
さらに、本実施の形態では、チップ保持部26の回転軸方向に鍔状に突出してチップ保持部26の外周の異なる箇所に設けられた2つの被検出部26c、26dを備え、姿勢センサ13は、姿勢検出回転角度位置において、マイクロチップ200の姿勢が正姿勢回転角度位置であるときに被検出部26cに、マイクロチップ200の姿勢が左姿勢回転角度位置であるときに被検出部26dにレーザ光を照射しかつその反射光を受光可能であり、姿勢センサ14は、姿勢検出回転角度位置において、マイクロチップ200の姿勢が右姿勢回転角度位置であるときに被検出部26cに、マイクロチップ200の姿勢が正姿勢回転角度位置であるときに被検出部26dにレーザ光を照射しかつその反射光を受光可能である。
【0214】
これにより、正姿勢回転角度位置、右姿勢回転角度位置および左姿勢回転角度位置を検出することができるので、正姿勢回転角度位置、右姿勢回転角度位置および左姿勢回転角度位置のいずれかにマイクロチップ200の姿勢を正確に変更することができる。
さらに、本実施の形態では、回転台回転機構25は、所定単位の制御により90[°]ごとにチップ回転台23を回転させる。
【0215】
これにより、さらに逆姿勢回転角度位置を検出することができるので、正姿勢回転角度位置、右姿勢回転角度位置、逆姿勢回転角度位置および左姿勢回転角度位置のいずれかにマイクロチップ200の姿勢を正確に変更することができる。
さらに、本実施の形態では、左姿勢回転角度位置でマイクロチップ200の姿勢を保持しアーム回転機構22により回転アーム20を所定回数回転させる第1分離回転制御を第1遠心分離制御として行い、アーム回転機構22により姿勢検出回転角度位置まで回転アーム20を回転させ、姿勢センサ13、14の検出結果に基づいて、回転台回転機構25により正姿勢回転角度位置にマイクロチップ200の姿勢を変更する姿勢制御と、姿勢制御で変更後の姿勢を保持しアーム回転機構22により回転アーム20を所定回数回転させる第2分離回転制御とを第2遠心分離制御として行う。
【0216】
これにより、姿勢センサ13、14の検出結果に基づいて、回転台回転機構25により正姿勢回転角度位置にマイクロチップ200の姿勢が変更されるので、マイクロチップ200の姿勢をさらに正確に変更することができる。
さらに、本実施の形態では、姿勢センサ13、14の検出結果に基づいて、回転台回転機構25により正姿勢回転角度位置にマイクロチップ200の姿勢を変更し、アーム回転機構22により測定回転角度位置まで回転アーム20を回転させ、測定センサ31aにより測定処理を行う第1測定制御、および、姿勢センサ13、14の検出結果に基づいて、回転台回転機構25により右姿勢回転角度位置にマイクロチップ200の姿勢を変更し、アーム回転機構22により測定回転角度位置まで回転アーム20を回転させ、測定センサ31bにより測定処理を行う第2測定制御を行う。
【0217】
これにより、測定回転角度位置において測定センサ31a、31bの測定範囲に測定部200aが属することとなる回転角度位置にマイクロチップ200の姿勢が変更され、測定回転角度位置まで回転アーム20が回転し、測定センサ31a、31bにより測定処理が行われるので、測定処理を行うためにマイクロチップ200の姿勢を手動で変更しなくてもすむ。
【0218】
さらに、本実施の形態では、姿勢センサ13、14の検出結果に基づいて姿勢検出回転角度位置で回転アーム20を停止させる。
これにより、姿勢センサ13、14を併用して回転アーム20の位置決めを行うことができるので、回転アーム20に回転センサを別途設けなくてもすむ。
さらに、本実施の形態では、姿勢センサ13、14の検出結果に基づいて、マイクロチップ200の姿勢が適切に90[°]回転しないと判定したときは、制御を中断する。
【0219】
これにより、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じた場合は、制御が中断されるので、安全性を向上することができる。
さらに、本実施の形態では、検体液分析装置100は、遠心力付与装置2において、アーム回転機構22により回転アーム20を回転駆動することができるとともに、駆動回路22bに供給する制御信号を制御する。
【0220】
これにより、回転アーム20を所望の回転角度位置に停止することができる。
さらに、本実施の形態では、遠心力付与装置2は、回転台駆動力伝達機構27を駆動してカム25aを上下動させる。
これにより、チップ保持部26に保持されたマイクロチップ200の姿勢を変更することができる。
【0221】
さらに、本実施の形態では、遠心力付与装置2は、回転アーム20の両端部に、その重心位置に対して長尺方向の対称位置にチップ回転機構部を設けた。
これにより、回転アーム20の両端の重量バランスを平衡に保つことができ、回転アーム20を安定したバランスで高速回転させることができる。
さらに、本実施の形態では、遠心力付与装置2は、回転台駆動力伝達機構27を、基台1側にショックアブソーバ27cを固定支持し、ソレノイド本体27aの駆動で直進運動するソレノイドシャフト27bの後端部に衝撃吸収ブラケット27eを結合し、ソレノイドシャフト27bが直進運動時に衝撃吸収ブラケット27eがピストンロッドの先端に衝突する構成とした。
【0222】
これにより、突き上げ動作におけるソレノイドシャフト27bの直進移動時の衝撃を吸収することができる。
さらに、本実施の形態では、遠心力付与装置2は、回転台駆動力伝達機構27を構成するソレノイドシャフト27bの先端部に、緩衝部材27fを介してプッシャ27gを連結した。
【0223】
これにより、プッシャ27gが伝達部25cに衝突したときの衝撃を吸収することができる。
さらに、本実施の形態では、遠心力付与装置2は、コイルばね25fを、コイルばね25fの縮み時の捩れ力による回転方向とばね25fの巻き方向とが同じで、かつばね25fの縮んだ状態から復元時の回転方向とばね25fの巻き方向とは逆の方向とが同じ方向となる構造とした。
【0224】
これにより、コイルばね25fの伸縮時における両端部の摺動抵抗を低減することができる。したがって、コイルばね25fの伸縮動作を滑らかにすることができるので、回転台回転軸24を滑らかに回転させることができる。
さらに、本実施の形態では、遠心力付与装置2は、回転台回転機構25を構成するコイルばね25fの上端部と回転アーム20との間と、コイルばね25fの下端部と伝達部25cとの間とに、リング形状の低摺動部材25gを設けた。
【0225】
これにより、コイルばね25fの両端部の摺動抵抗をさらに低減することができる。したがって、コイルばね25fの伸縮動作をより滑らかにすることができるので、回転台回転軸24をより滑らかに回転させることができる。
さらに、本実施の形態では、遠心力付与装置2は、回転台回転機構25を構成するカム25a、上側カム用ピン25d、下側カム用ピン25e、回転台回転軸24を形成する部品の材質の組み合わせを上記(A)〜(D)のいずれかの組み合わせで構成した。
【0226】
これにより、これらの部品の間でのかじりによって回転台回転軸24の回転が妨げられる状態が発生するのを防ぎまたは低減することができる。
さらに、本実施の形態では、遠心力付与装置2は、上端カム面25jの傾斜面25mを、垂直方向に右上から左下に向かう傾斜面とし、下端カム面25oの傾斜面25pを、垂直方向に右下から左上に向かう傾斜面とし、さらに回転アーム20の回転方向を時計回り方向とした。
【0227】
そのため、回転アーム20を時計回りに高速回転させて遠心力を付与したときに、下側カム用ピン25eには、下端カム面25oを構成するピン嵌合溝25qの壁に向かって押し付けられる方向に力が加わる。
これにより、遠心力付与時に、回転台回転軸24が回転するのを防止することができるので、遠心力の付与時に、マイクロチップ200の姿勢が変更するのを防止することができる。
【0228】
さらに、本実施の形態では、遠心力付与装置2は、チップ保持部26を、マイクロチップ200の外周全体を枠部26bで囲んで保持し、かつ押さえ部材26bによって、マイクロチップ200の一部を上から押さえる構成とした。
これにより、マイクロチップ200がどのような回転角度位置にあっても、遠心力の付与中に遠心力によってマイクロチップ200がチップ保持部26から脱離するのを防止でき、かつ、振動等によって上方向への力が発生しても、マイクロチップ200を浮上し難くできる。
【0229】
さらに、本実施の形態では、遠心力付与装置2は、回転台回転機構25と回転台駆動力伝達機構27とを別体とし、回転台回転軸24に沿ったカム25aの垂直方向の上下動によって、回転台駆動力伝達機構27の突き上げ力を回転台回転軸24の回転力へと変換する構成とした。
これにより、回転台回転軸24を回転させるのに、回転台回転軸24を垂直方向に上下動させる必要がないため、チップ回転台23およびチップ保持部26を上下動させずにその場で回転させることができる。したがって、チップ回転台23、回転台回転軸24およびチップ保持部26を垂直方向に上下動させる構造にしなくてもすむ(上下動不能に固定できる)ので、例えば、アーム回転軸21の回転がアンバランスとなって、これらの構成部に上方向の力が加わっても、構成部が浮上するのを確実に防止することができる。
【0230】
さらに、本実施の形態では、光学式測定装置3は、センサヘッド30を、上方側角柱部材36a、スライドレール32、33に沿ってチップ回転機構部に対して接近および離間移動する構成とした。
これにより、センサヘッド30の接近および離間方向への移動時の前後方向および上下方向の動きを抑えることができ、センサヘッド30を基台1の上面と平行に保ちながら接近および離間方向に確実に直進移動させることができる。したがって、チップ保持部26の位置決めを精度よく行うことができ、正確な測定処理位置への移動に対する再現性を確保することができる。
【0231】
さらに、本実施の形態では、光学式測定装置3は、2つのレーザ発光部30b、30cを設けるとともに、レーザ発光部30b、30cの互いの発光素子を、L字を左右逆にしたような配列とした。
これにより、マイクロチップ200の姿勢を90[°]変更することで、同じ測定回転角度位置で、波長が異なる2種類の測定を行うことができる。
【0232】
さらに、本実施の形態では、光学式測定装置3は、発光ヘッド30aと受光ヘッド30fとを形成する部材を黒色の絶縁部材とした。
これにより、発光ヘッド30aの各発光素子から照射されたレーザ光が受光ヘッド30fの表面で反射する反射量を大幅に低減することができる。したがって、反射光による誤動作の発生等を低減することができる。
【0233】
さらに、絶縁部材の性質によって、発光ヘッド30aに設けられた発光素子同士が電気的に干渉し合うのを低減することができる。これにより、電気的干渉によるレーザ光への不具合(波長の変化等)の発生を低減することができる。
さらに、受光ヘッド30fに設けられた複数の受光素子を形成する金属部材にノイズが乗るのを防ぎまたはノイズの乗る量を低減することもできる。これにより、ノイズによる測定結果の誤差の発生を防ぎまたは誤差量を低減することができる。
【0234】
さらに、本実施の形態では、光学式測定装置3は、発光ヘッド30aおよび受光ヘッド30fの後端側および前端側に支持部材30d、30eを設け、センサヘッド30を遠心力付与装置2側に移動させたときに、支持部材30d、30eの傾斜面がチップ保持部26の角部と接触する構成とした。
これにより、測定処理位置においてチップ保持部26とセンサヘッド30との位置決めを行いかつその位置を固定支持することができる。
【0235】
上記第1の実施の形態において、マイクロチップ200は、発明1ないし3、5、6または8のチップに対応し、回転アーム20は、発明1、2、5ないし7の第1回転体に対応し、アーム回転機構22は、発明1、2、5または6の第1回転手段に対応し、チップ回転台23は、発明1ないし3の第2回転体に対応している。また、回転台回転機構25は、発明1、2、5または6の第2回転手段に対応し、姿勢センサ13は、発明1ないし3、5ないし8の第1姿勢センサに対応し、姿勢センサ14は、発明1ないし3、5ないし8の第2姿勢センサに対応し、ステップS300〜S304は、発明1、2、5若しくは8の第1遠心分離制御、または発明5の第1分離回転制御に対応している。
【0236】
また、上記第1の実施の形態において、ステップS306〜S336は、発明1、2、5または8の第2遠心分離制御に対応し、ステップS306〜S324は、発明5の姿勢制御に対応し、ステップS326〜S336は、発明5の第2分離回転制御に対応し、ステップS300〜S336は、発明1、2または7の遠心分離制御手段に対応している。また、ステップS318〜S324、S338〜S342は、発明6の第1測定制御に対応し、ステップS348〜S352は、発明6の第2測定制御に対応し、ステップS318〜S324、S338〜S352は、発明6の測定制御手段に対応している。
【0237】
また、上記第1の実施の形態において、ステップS324、S316は、発明8の制御禁止手段に対応し、正姿勢回転角度位置は、発明1ないし3、5、6若しくは8の第1回転角度位置、または発明6の第1測定姿勢回転角度位置に対応し、右姿勢回転角度位置は、発明1ないし3、5、6若しくは8の第2回転角度位置、または発明6の第2測定姿勢回転角度位置に対応している。また、左姿勢回転角度位置は、発明3、5、6または8の第3回転角度位置に対応し、測定センサ31aの測定範囲は、発明6の第1測定範囲に対応し、測定センサ31bの測定範囲は、発明6の第2測定範囲に対応している。
〔第1の実施の形態の変形例〕
なお、上記第1の実施の形態において、被検出部26dは、被検出部26cが設けられた第1辺の右隣の第2辺の外周面に設けて構成したが、これに限らず、被検出部26cが設けられた第1辺の左隣の第3辺の外周面に設けて構成することもできる。
【0238】
このような構成であれば、姿勢検出回転角度位置においてマイクロチップ200の姿勢が正姿勢回転角度位置であるときは、姿勢センサ13は、被検出部26cにレーザ光を照射しかつその反射光を受光することができるが、姿勢センサ14は、その光軸上に被検出部26c、26dが存在しないため反射光を受光できない。そのため、姿勢センサ13はONのセンサ信号を、姿勢センサ14はOFFのセンサ信号を出力する。したがって、姿勢センサ13のセンサ信号がONで、姿勢センサ14のセンサ信号がOFFのときは、マイクロチップ200の姿勢が正姿勢回転角度位置であることを検出することができる。
【0239】
姿勢検出回転角度位置においてマイクロチップ200の姿勢が右姿勢回転角度位置であるときは、姿勢センサ13は、被検出部26dにレーザ光を照射しかつその反射光を受光することができるとともに、姿勢センサ14は、被検出部26cにレーザ光を照射しかつその反射光を受光することができる。そのため、姿勢センサ13、14はいずれもONのセンサ信号を出力する。したがって、姿勢センサ13、14のセンサ信号がいずれもONのときは、マイクロチップ200の姿勢が右姿勢回転角度位置であることを検出することができる。
【0240】
姿勢検出回転角度位置においてマイクロチップ200の姿勢が逆姿勢回転角度位置であるときは、姿勢センサ13は、その光軸上に被検出部26c、26dが存在しないため反射光を受光できないが、姿勢センサ14は、被検出部26dにレーザ光を照射しかつその反射光を受光することができる。そのため、姿勢センサ13はOFFのセンサ信号を、姿勢センサ14はONのセンサ信号を出力する。したがって、姿勢センサ13のセンサ信号がOFFで、姿勢センサ14のセンサ信号がONのときは、マイクロチップ200の姿勢が逆姿勢回転角度位置であることを検出することができる。
これにより、正姿勢回転角度位置、右姿勢回転角度位置および逆姿勢回転角度位置を検出することができるので、正姿勢回転角度位置、右姿勢回転角度位置および左姿勢回転角度位置のいずれかにマイクロチップ200の姿勢を正確に変更することができる。
【0241】
姿勢検出回転角度位置においてマイクロチップ200の姿勢が左姿勢回転角度位置であるときは、姿勢センサ13、14はいずれも、その光軸上に被検出部26c、26dが存在しないため反射光を受光できない。そのため、姿勢センサ13、14はいずれもOFFのセンサ信号を出力する。したがって、姿勢センサ13、14のセンサ信号がいずれもOFFのときは、マイクロチップ200の姿勢が左姿勢回転角度位置であることを検出することができる。この場合、姿勢センサ13、14のセンサ信号がいずれもOFFであるので、姿勢センサ13、14のセンサ信号からでは、マイクロチップ200の姿勢が左姿勢回転角度位置なのか、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じたのか区別がつかないことがある。そこで、例えば、左姿勢回転角度位置からチップ回転台23を1回転させることにより障害か否かを判定することができる。障害でない場合は、正姿勢回転角度位置、右姿勢回転角度位置および逆姿勢回転角度位置でONのセンサ信号を得ることができ、障害である場合は、いずれかの回転角度位置で正常なセンサ信号を得ることができないので、左姿勢回転角度位置なのか障害が生じたのかを区別することができる。なお、上記第1の実施の形態において、逆姿勢回転角度位置を判定する場合にも、姿勢センサ13、14のセンサ信号がいずれもOFFであるので、同様に適用することができる。
【0242】
これにより、さらに左姿勢回転角度位置を検出することができるので、正姿勢回転角度位置、右姿勢回転角度位置、逆姿勢回転角度位置および左姿勢回転角度位置のいずれかにマイクロチップ200の姿勢を正確に変更することができる。
【0243】
この場合において、マイクロチップ200は、発明4のチップに対応し、チップ回転台23は、発明4の第2回転体に対応し、姿勢センサ13は、発明4の第1姿勢センサに対応し、姿勢センサ14は、発明4の第2姿勢センサに対応し、正姿勢回転角度位置は、発明4の第1回転角度位置に対応している。また、右姿勢回転角度位置は、発明4の第2回転角度位置に対応し、逆姿勢回転角度位置は、発明4の第3回転角度位置に対応している。
【0244】
また、上記第1の実施の形態においては、回転アーム20の一端の側に2つの姿勢センサ13、14を設けて構成したが、これに限らず、図29に示すように、回転アーム20の一端の側に2つの姿勢センサ13a、14aを、回転アーム20の他端の側に2つの姿勢センサ13b、14bを設けて構成することもできる。
【0245】
図29は、回転アーム20の両端の側に姿勢センサ13a、14a、13b、14bを設けた場合を示す図である。
これにより、回転アーム20の両端のチップ保持部26に保持されたマイクロチップ200の姿勢をそれぞれ検出することができる。また、姿勢検出回転角度位置で回転アーム20を停止させる制御をさらに正確に行うことができる。
姿勢センサ13bは、図29に示すように、回転アーム20の回転中心に対して姿勢センサ13aと対称の位置に設けられているとともに、姿勢センサ14aの光軸上から外れた位置に設けられている。これにより、姿勢センサ13a、14aからのレーザ光の干渉を受けることなく検出を行うことができる。
【0246】
姿勢センサ14bは、回転アーム20の回転中心に対して姿勢センサ14aと対称の位置に設けられているとともに、姿勢センサ13aの光軸上から外れた位置に設けられている。これにより、姿勢センサ13a、14aからのレーザ光の干渉を受けることなく検出を行うことができる。
また、図29の構成においては、マイクロチップ200の姿勢が逆姿勢回転角度位置であるときは、姿勢センサ13a、14a、13b、14bのセンサ信号がいずれもOFFとなる。この場合、姿勢センサ13a、14a、13b、14bのセンサ信号からでは、マイクロチップ200の姿勢が逆姿勢回転角度位置なのか、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じたのか区別がつかないことがある。
【0247】
そこで、逆姿勢回転角度位置のときにONのセンサ信号が得られるように姿勢センサ13bを基台1の左内周面に設置する。具体的には、姿勢センサ13bは、マイクロチップ200の姿勢が右姿勢回転角度位置であるときに被検出部26dに、マイクロチップ200の姿勢が逆姿勢回転角度位置であるときに被検出部26cにレーザ光を照射しかつその反射光を受光可能とする。そして、例えば、姿勢検出回転角度位置においてマイクロチップ200の姿勢が逆姿勢回転角度位置であるときは、回転アーム20を180[°]回転させることにより障害か否かを判定することができる。障害でない場合は、姿勢センサ13bでONのセンサ信号を得ることができ、障害である場合は、正常なセンサ信号を得ることができないので、逆姿勢回転角度位置なのか障害が生じたのかを区別することができる。
【0248】
また、上記第1の実施の形態において、姿勢センサ13、14は、光軸が互いに平行となるように配置したが、これに限らず、光軸が互いに直交するように配置することもできる。例えば、姿勢センサ13の光軸が左右方向となるように姿勢センサ13を基台1の左内周面に設置すればよい。
また、上記第1の実施の形態においては、2つの被検出部26c、26dを設けて構成したが、これに限らず、被検出部26c、26dのいずれか一方のみを設けて構成することもできる。
【0249】
これにより、被検出部26cのみを設ける場合は、正姿勢回転角度位置および右姿勢回転角度位置を、被検出部26dのみを設ける場合は、正姿勢回転角度位置および左姿勢回転角度位置を検出することができる。
また、上記第1の実施の形態においては、チップ保持部26の回転軸方向に鍔状に突出してチップ保持部26の外周の異なる箇所に2つの被検出部26c、26dを設けて構成したが、これに限らず、チップ保持部26の外周面に形成され、外周面とは異なる光反射特性を有する被検出部を設けて構成することもできる。ここで、被検出部は、例えば、ミラー、外周面とは異なる色彩、外周面とは異なる模様、または外周面とは異なる起伏形状により実現することができる。
【0250】
また、上記第1の実施の形態において、図23ないし図25のフローチャートに示す処理を実行するにあたってはいずれも、ROM304にあらかじめ格納されている制御プログラムを実行する場合について説明したが、これに限らず、これらの手順を示したプログラムが記憶された記憶媒体から、そのプログラムをRAM306に読み込んで実行するようにしてもよい。
【0251】
ここで、記憶媒体とは、RAM、ROM等の半導体記憶媒体、FD、HD等の磁気記憶型記憶媒体、CD、CDV、LD、DVD等の光学的読取方式記憶媒体、MO等の磁気記憶型/光学的読取方式記憶媒体であって、電子的、磁気的、光学的等の読み取り方法のいかんにかかわらず、コンピュータで読み取り可能な記憶媒体であれば、あらゆる記憶媒体を含むものである。
【0252】
また、上記第1の実施の形態においては、本発明に係る遠心力付与装置および検体液分析装置を、検体液を遠心分離し分析する場合について適用したが、これに限らず、本発明の主旨を逸脱しない範囲で他の場合にも適用可能である。
【0253】
〔第2の実施の形態〕
次に、本発明の第2の実施の形態を図面を参照しながら説明する。図30ないし図32は、本発明に係る遠心力付与装置および検体液分析装置の第2の実施の形態を示す図である。
【0254】
上記第1の実施の形態では、図12に示すように、回転台駆動力伝達機構27としてソレノイド本体27aによる駆動機構を採用したのに対し、本実施の形態では、モータおよびカム機構による駆動機構を採用する点が異なる。なお、以下、上記第1の実施の形態と異なる部分についてのみ説明し、重複する部分については同一の符号を付して説明を省略する。
【0255】
上記第1の実施の形態のように、ショックアブソーバ27c付きソレノイドでは衝撃を完全には吸収できないため、マイクロチップ200内の液体が攪拌されてしまうという問題が想定される。この対策として、本実施の形態は、モータおよびカム機構による駆動機構を採用することにより、プッシャ27gの突き上げ速度の調整が可能となり、マイクロチップ200の回転時の衝撃を低減することを実現する。
【0256】
本実施の形態に係る回転台駆動力伝達機構27の構成を説明する。
図30は、遠心力付与装置2の正面図である。
図31は、遠心力付与装置2の側面図である。
回転台駆動力伝達機構27は、図30および図31に示すように、モータ27hと、モータ27hの回転駆動により回転する板カム27iと、板カム27iに従動して上下動する突き上げシャフト27jと、突き上げシャフト27jを軸支するリニアブッシュ27kと、突き上げシャフト27jの先端に取り付けられたプッシャ27gとを有して構成されている。
【0257】
モータ27hは、回転軸27lが水平となるように配置されている。モータ27hとしては、例えば、DCモータまたはステッピングモータを採用することができる。本実施の形態では、DCモータと減速機を組み合わせて構成した。これにより、小型モータで大きいトルクを得ることができ、装置の小型化が可能となる。また、モータ回転数(入力電圧)を制御することによりプッシャ27gの突き上げ速度を調整(例えば、遅く)することができるので、マイクロチップ200の回転時の衝撃を低減することができる。なお、モータ27hに代えて、回転の駆動力を得ることができるアクチュエータを採用することもできる。
【0258】
板カム27iは、モータ27hの回転軸27lに取り付けられている。なお、板カム27iに代えて、溝カム、円筒カム、斜板カム、端面カムまたは球面カム等のカム機構を採用することもできる。
突き上げシャフト27jは、垂直に配置され、その下端が板カム27iの外周面上端に当接している。突き上げシャフト27jには、コイルばね27mが巻き付けられているとともに、フランジ状のストッパ27nが形成されている。コイルばね27mは、ストッパ27nとリニアブッシュ27kの間に介挿され、その下端がストッパ27nにより係止される。突き上げシャフト27jは、コイルばね27mの付勢力によりその下端が板カム27iに押し付けられ、常に、その下端が板カム27iの外周面に接する状態となる。そのため、突き上げシャフト27jを板カム27iに従動させることができる。
【0259】
リニアブッシュ27kは、基台1の下面に取り付けられ、突き上げシャフト27jを軸支している。これにより、突き上げシャフト27jは、水平方向の移動が拘束され垂直方向にのみ変位可能となる。
同じ材料の金属同士を摺動させた場合に発生しやすいかじりを防止するために、板カム27i、突き上げシャフト27j、プッシャ27gは、それぞれ異なる材料で構成することが好ましい。例えば、ナイロン、S45C等の炭素鋼、SUS304等のステンレス、黄鋼、A5052のようなアルミ合金の組み合わせで構成することができる。本実施の形態では、板カム27iをS45C、突き上げシャフト27jをA5052、プッシャ27gをナイロンで構成した。
【0260】
回転台駆動力伝達機構27は、さらに、図示しないが、突き上げシャフト27jの上下方向の位置を検出する位置検出センサを有して構成されている。これにより、制御基板300では、位置検出センサからのセンサ信号に基づいて突き上げシャフト27jの位置を判定することができるので、入力パルス数によって位置決めを行うステッピングモータでなくても、オン・オフ制御のみを行うDCモータを使用し、突き上げシャフト27jの上下動を制御することができる。
【0261】
次に、本実施の形態の動作を説明する。
図32は、回転台駆動力伝達機構27の動作を示す図である。
制御基板300は、まず、マイクロチップ200の姿勢を変更するために、回転台駆動力伝達機構27に制御信号を出力し、モータ27hを駆動させる。モータ27hが駆動すると、モータ27hの駆動力により板カム27iが回転し、図32(c)、同図(a)の順に状態が遷移し、板カム27iに従動して突き上げシャフト27jが上方に直進移動する。これに伴って、プッシャ27gが上方に直進移動し、姿勢検出回転角度位置に停止している回転台回転機構25の伝達部25cを突き上げる。これにより、伝達部25cと一体形成されたカム25aが回転台回転軸24に沿って突き上げられる。
【0262】
カム25aが突き上げられると、上端カム面25jと、上側カム用ピン25dとによって、突き上げ力が回転台回転軸24の回転力へと変換され、回転台回転軸24が時計回りに回転する。
その後、モータ27hをさらに駆動させると、モータ27hの駆動力により板カム27iが回転し、同図(a)、同図(b)、同図(c)の順に状態が遷移し、板カム27iに従動して突き上げシャフト27jが下方に直進移動する。これに伴って、プッシャ27gが下方に直進移動し、伝達部25cから離間する。回転台回転機構25では、カム25aが回転台回転軸24に沿って下方向に直進移動し、下端カム面25oと、下側カム用ピン25eとによって、カム25aの下方向の移動力が回転台回転軸24の回転力へと変換され、回転台回転軸24がさらに時計回りに回転する。
【0263】
このようにして、本実施の形態では、モータ27hと、モータ27hの回転駆動により回転する板カム27iと、板カム27iに従動して上下動する突き上げシャフト27jと、突き上げシャフト27jの先端に取り付けられたプッシャ27gとを備える。
これにより、プッシャ27gの突き上げ速度の調整が可能となり、マイクロチップ200の回転時の衝撃を低減することができる。
【0264】
上記第2の実施の形態において、チップ回転台23は、発明9の第2回転体に対応し、回転台回転機構25は、発明9の第2回転手段に対応し、回転台駆動力伝達機構27は、発明9の駆動力伝達手段に対応し、モータ27hは、発明9の回転駆動手段に対応している。
【0265】
〔第3の実施の形態〕
次に、本発明の第3の実施の形態を図面を参照しながら説明する。図33ないし図35は、本発明に係る遠心力付与装置および検体液分析装置の第3の実施の形態を示す図である。
【0266】
上記第1の実施の形態では、図15に示すように、センサヘッド30の移動機構としてソレノイド39による駆動機構を採用したのに対し、本実施の形態では、モータおよびクランク機構による駆動機構を採用する点が異なる。なお、以下、上記第1の実施の形態と異なる部分についてのみ説明し、重複する部分については同一の符号を付して説明を省略する。
【0267】
上記第1の実施の形態のように、ソレノイド39による駆動機構の場合、センサヘッド30をチップ回転機構部に接近させ測定を行う場合、測定中常にソレノイド39に電流を流しておく必要がある。そのため、ソレノイド39が発熱源となり、装置内温度管理が困難であった。検体液分析装置100では、精度保障のため装置内温度を細かく制御する必要があり、発熱の少ない機構への変更が求められる。この対策として、本実施の形態は、モータ駆動およびクランク機構を採用することにより、センサヘッド30の移動時にのみモータを駆動すればよいので、発熱を抑えることができ、装置内温度管理を精密に行うことを実現する。
【0268】
本実施の形態に係るセンサヘッド30の移動機構を説明する。
図33は、光学式測定装置3の正面図である。
図34は、光学式測定装置3の側面図である。
光学式測定装置3は、図33および図34に示すように、モータ39aと、モータ39aの回転駆動により回転するクランク円盤39bと、クランク円盤39bの盤面上に一端が固定されたコネクティングロッド39cと、コネクティングロッド39cの他端に連結しセンサヘッド30の移動方向に変位可能な伝達シャフト39dと、伝達シャフト39dの先端に取り付けられた伝達部材41とを有して構成されている。
【0269】
モータ39aは、回転軸39eが水平でかつセンサヘッド30の移動方向に直交するように配置されている。モータ39aとしては、例えば、DCモータまたはステッピングモータを採用することができる。なお、モータ39aに代えて、回転の駆動力を得ることができるアクチュエータを採用することもできる。
コネクティングロッド39cの一端は、クランク円盤39bの盤面上に、クランクピン39fによりその軸回りに回転自在に固定されている。また、コネクティングロッド39cの他端は、伝達シャフト39dの末端に、クランクピン39gによりその軸回りに回転自在に固定されている。
【0270】
伝達シャフト39dは、図示しない支持部材により垂直方向の移動が拘束されセンサヘッド30の移動方向にのみ変位可能となっている。伝達シャフト39dには、所定間隔をあけて2つのフランジ39h、39iが形成されている。そして、フランジ39h、39iの間には伝達部材41が外嵌され、伝達部材41とフランジ39iの間にはコイルばね39jが巻き付けられている。
【0271】
光学式測定装置3は、さらに、図示しないが、コネクティングロッド39cの一端がチップ回転機構部に最も接近したときの伝達部材41の位置を検出する第1位置検出センサを有して構成されている。これにより、制御基板300では、第1位置検出センサからのセンサ信号に基づいてセンサヘッド30がチップ保持部26に当接したことを判定することができるので、そのタイミングでモータ39aを停止させることにより、センサヘッド30をチップ保持部26に固定した状態で保持することができる。
【0272】
光学式測定装置3は、さらに、図示しないが、コネクティングロッド39cの一端がチップ回転機構部から最も離間したとき(図33、図34の状態)の伝達部材41の位置を検出する第2位置検出センサを有して構成されている。これにより、制御基板300では、第2位置検出センサからのセンサ信号に基づいてセンサヘッド30が初期位置に復帰したことを判定することができるので、そのタイミングでモータ39aを停止させることにより、センサヘッド30を初期状態に保持することができる。
【0273】
次に、本実施の形態の動作を説明する。
図35は、光学式測定装置3の動作を示す図である。
初期状態では、図35(a)の状態となり、伝達部材41は、フランジ39hによってチップ回転機構部とは反対の方向に押されるので、センサヘッド30をチップ回転機構部から離間させることができる。これにより、アーム回転機構22により回転アーム20を回転させることができる。
【0274】
回転アーム20が測定回転角度位置に停止すると、制御基板300は、モータ39aに制御信号を出力し、モータ39aを駆動させる。モータ39aが駆動すると、モータ39aの駆動力によりクランク円盤39bが回転し、同図(a)、同図(b)、同図(c)の順に状態が遷移し、クランク円盤39bに従動してコネクティングロッド39cの一端が回転する。これに伴って、伝達シャフト39dがチップ回転機構部の方向に直進移動する。伝達部材41は、伝達シャフト39dの直進運動力を、連結部材38cを介して、センサヘッド30に略同時に伝達する。これにより、センサヘッド30の結合部を介して伝達された直進運動力によって、スライダ34、35の固着されたセンサヘッド30が、上方側角柱部材36a、スライドレール32、33のレール部に沿ってチップ回転機構部の方向に直進移動する。センサヘッド30は、支持部材30d、30eがチップ保持部26の角部に当接するまで直進移動する。当接後、チップ回転機構部の方向への移動量は、伝達部材41とフランジ39iの間に設けられたコイルばね39jによって吸収される。そして、支持部材30d、30eによってチップ保持部26の角部を押さえ付けることで、測定処理位置においてチップ保持部26とセンサヘッド30との位置決めが行われかつその位置が固定支持される。
【0275】
センサヘッド30が測定処理位置に移動すると、制御基板300は、上記第1の実施の形態と同様に、測定センサ31aに制御信号を出力してレーザ発光部30bにより測定を行う。
測定が完了すると、制御基板300は、モータ39aに制御信号を出力し、モータ39aを再度駆動させる。モータ39aが駆動すると、モータ39aの駆動力によりクランク円盤39bが回転し、同図(c)、同図(a)の順に状態が遷移し、クランク円盤39bに従動してコネクティングロッド39cの一端が回転する。これに伴って、伝達シャフト39dがチップ回転機構部とは反対の方向に直進移動し、センサヘッド30がチップ回転機構部から離間し、初期位置へと復帰する。
【0276】
このようにして、本実施の形態では、モータ39aと、モータ39aの回転駆動により回転するクランク円盤39bと、クランク円盤39bの盤面上に一端が固定されたコネクティングロッド39cと、コネクティングロッド39cの他端に連結しセンサヘッド30の移動方向に変位可能な伝達シャフト39dと、伝達シャフト39dの先端に取り付けられた伝達部材41とを備える。
【0277】
これにより、センサヘッド30の移動時にのみモータ39aを駆動すればよいので、発熱を抑えることができ、装置内温度管理を精密に行うことができる。
上記第3の実施の形態において、スライドレール32、33、スライダ34、35およびモータ39aは、発明10の移動手段に対応し、モータ39aは、発明10の回転駆動手段に対応している。
【0278】
〔第2および第3の実施の形態の変形例〕
なお、上記第2の実施の形態に対して上記第3の実施の形態を適用することもできる。
また、上記第2の実施の形態における回転台駆動力伝達機構27に対して上記第3の実施の形態のクランク機構を適用することもできる。
【0279】
また、上記第3の実施の形態におけるセンサヘッド30の移動機構に対して上記第2の実施の形態のカム機構を適用することもできる。
また、上記第2および第3の実施の形態に対して上記第1の実施の形態の変形例を適用することもできる。
【図面の簡単な説明】
【0280】
【図1】検体液分析装置100の概略構成を示す斜視図である。
【図2】検体液分析装置100の概略構成を示す平面図である。
【図3】遠心力付与装置2の概略構成を示す正面図である。
【図4】遠心力付与装置2の遠心力付与時の回転バランスを均衡させる構成を示す図である。
【図5】アーム回転機構22の構成を示すブロック図である。
【図6】マイクロチップ200の形状例を示す図である。
【図7】チップ保持部26の構造例を示す図である。
【図8】姿勢センサ13、14の検出動作を示す図である。
【図9】マイクロチップ200の装着例を示す図である。
【図10】回転台回転機構25の構成を示す側面図である。
【図11】カム25aの構成を示す図である。
【図12】回転台駆動力伝達機構27の構成を示す垂直方向の断面図である。
【図13】プッシャ27gで突き上げ時の回転台回転機構25の動作を示す図である。
【図14】プッシャ27gで突き上げ後の回転台回転機構25の動作を示す図である。
【図15】光学式測定装置3の構成を示す図である。
【図16】センサヘッド30のスライド移動動作の一例を示す図である。
【図17】センサヘッド30の構成を示す図である。
【図18】黒色の絶縁部材を用いて形成されたセンサヘッド30の一例を示す図である。
【図19】温度調整装置4の内部構成を示す図である。
【図20】検体液分析装置100の内部における空気の流れの一例を示す図である。
【図21】基台1の上面部における空気の流れの一例を示す図である。
【図22】制御基板300の構成を示すブロック図である。
【図23】チップセット処理を示すフローチャートである。
【図24】モータ原点確定処理を示すフローチャートである。
【図25】検体液分析処理を示すフローチャートである。
【図26】遠心力付与時の動作を示す図である。
【図27】マイクロチップ200の姿勢変更時の動作を示す図である。
【図28】光学式測定装置3の測定処理時の動作を示す図である。
【図29】回転アーム20の両端の側に姿勢センサ13a、14a、13b、14bを設けた場合を示す図である。
【図30】遠心力付与装置2の正面図である。
【図31】遠心力付与装置2の側面図である。
【図32】回転台駆動力伝達機構27の動作を示す図である。
【図33】光学式測定装置3の正面図である。
【図34】光学式測定装置3の側面図である。
【図35】光学式測定装置3の動作を示す図である。
【符号の説明】
【0281】
100…検体液分析装置、 200…マイクロチップ、 200a…測定部、 1…基台、 2…遠心力付与装置、 3…光学式測定装置、 4…温度調整装置、 5…遮光カバー、 12…プレート、 13、13a、13b、14、14a、14b…姿勢センサ、 10、11、16、17…通風口、 15…開閉シャッタ、 20…回転アーム、 21…アーム回転軸、 22…アーム回転機構、 23…チップ回転台、 24…回転台回転軸、 25…回転台回転機構、 26…チップ保持部、 22a…ステッピングモータ、 22b…駆動回路、 25a…カム、 25b…ガイド部、 25c…伝達部、 25d…上側カム用ピン、 25e…下側カム用ピン、 25f…コイルばね、 25g…低摺動部材、 25j…上端カム面、 25m、25p…傾斜面、 25n、25r…壁、 25q…ピン嵌合溝、 25t…係合溝、 25o…下端カム面、 26a…枠部、 26b…チップ押さえ部、 26c、26d…被検出部、 27…回転台駆動力伝達機構、 27a…ソレノイド本体、 27b、40…ソレノイドシャフト、 27c…ショックアブソーバ、 27d…支持ブラケット、 27e…衝撃吸収ブラケット、 27f…緩衝部材、 27g…プッシャ、 28、39…ソレノイド、 30…センサヘッド、 30a…発光ヘッド、 30b、30c…レーザ発光部、 30d、30e…支持部材、 30f…受光ヘッド、 30g、30h…レーザ受光部、 38a、38b…コイルばね、 38c…連結部材、 32、33…スライドレール、 34、35…スライダ、 36…スライド補助部材、 37…心棒、 38…戻り用ばね部、 41…伝達部材、 50…調温部、 51、55…温度センサ、 52…ファン、 53…発熱体、 54…筐体、 300…制御基板、 302…CPU、 304…ROM、 306…RAM、 308…駆動指令出力I/F、 310…センサ入力I/F、 312…通信I/F、 27h、39a…モータ、 27i…板カム、 27j…突き上げシャフト、 27k…リニアブッシュ、 27l、39e…回転軸、 27m、39j…コイルばね、 ストッパ27n、 39b…クランク円盤、 39c…コネクティングロッド、 39d…伝達シャフト、 39f、39g…クランクピン、 39h、39i…フランジ
【技術分野】
【0001】
本発明は、チップに遠心力を付与する装置および検体液を分析する装置に係り、特に、チップの姿勢を正確に変更することができるとともに、配線構造の簡素化を図り、チップ保持部の破損等の障害が発生した場合を判定することができる遠心力付与装置および検体液分析装置に関する。
【背景技術】
【0002】
検体液として血液を採取し、採取した血液を遠心分離して、血液中の赤血球、白血球、リンパ球、血小板、血液凝固因子等を分離し、分離によって得られた血清等の成分のpH値、酸素あるいは二酸化炭素等の濃度を測定する分析方法がある。
測定方法としては、例えば、血清等の被検査液に試薬を加えることによって得られた吸光成分を含有する測定対象液に対して光源から放射された光を照射し、これにより測定対象液を透過した光を受光部に受光させることによって得られる吸光度から被検査液中の検出対象成分の濃度を算出する。
【0003】
また、近年、μ−TAS(Total Analysis System)やLab.on.Chip(マイクロ全分析システムやチップ上研究室)と称されるマイクロチップを使用した分析方法が注目されている。
例えば、数cm角のチップ上にマイクロキャピラリと呼ばれる微細な溝状構造物を形成し、これに蓋をして流路を構成したマイクロチップを使用する。そして、DNAを中性ゲル中にいれ、DNAは電荷を有するので電気泳動によりマイクロキャピラリ流路中を移動させ、分子量の相違による総電荷相違により分離する。また、マイクロキャピラリ中を移動する物質に途中から他の試薬を入れ、吸光度の分析等、試薬による反応を検出する研究も盛んに行われている。
【0004】
従来、検体液の分析に用いるマイクロチップとしては、例えば、特許文献1記載の検査チップが知られている。
特許文献1記載の検査チップは、試料中の対象成分を定量する少なくとも1つの定量部を有し、定量部は、検査チップを所定の回転軸を中心として回転させることにより、試料から対象成分を遠心分離する遠心分離管と、遠心分離管の一方の端部に接続され、回転軸を中心とした回転により対象成分を秤量するための秤量管と、秤量管に接続され、対象成分を遠心分離管から秤量管に移送する移送手段と、試薬が貯蔵される少なくとも1つの試薬溜と、試薬溜および秤量管に接続されており、回転軸を中心とした再度の回転により秤量管から導入される対象成分が、対象成分が回転軸を中心とした回転により試薬溜から導入された試薬と混合される混合部と混合部に接続され、試薬および対象成分が混合された混合物質を通過させる光検出路と、光検出路に接続され、光検出路に光を導入するための光導入口と、光検出路に接続され、光検出路内を通過後の光を取り出すための光導出口とを有している。
【0005】
また、特許文献1記載の検査チップを遠心分離する装置として、例えば、特許文献2記載のマイクロチップ用遠心分離機が知られている。
特許文献2記載のマイクロチップ用遠心分離機は、分離部、秤量部、混合部を有するマイクロチップを、所定の回転角度に保持して分離を行うマイクロチップ用遠心分離装置において、遠心分離装置は、モータによって回転される第1回転体と、マイクロチップを保持し、第1回転体の回転軸を中心に回転可能に設けられた1個または複数個の第2回転体とを備え、所定の回転角度の状態で、モータが回転される時、第1回転体、第2回転体およびマイクロチップが一体に回転されて遠心分離が行われる第1の態様と、モータの回転を停止している状態で、第2回転体を回転させ、マイクロチップを他の所定の回転角度に保持する第2の態様とを有する。
【0006】
第2の態様において、マイクロチップを時計回りに90[°]回転させる場合は、作業者が回転レバーをスプリングバンドのバネ力に抗して上部に持ち上げ、回転規制溝と主軸連結ピンとの係合を解除し、回転レバーを反時計回りに180[°]回転させる。その結果、回転レバーに設けられた係合ピンは副回転ギアと係合された状態にあるので、副回転ギアも反時計回りに180[°]回転し、さらに副回転ギアと歯合している第2回転体が時計回りに90[°]回転し、マイクロチップが時計回りに90[°]回転する(同文献〔0017〕)。
【特許文献1】特開2005−114438号公報
【特許文献2】特開2006−110491号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献2記載の技術にあっては、マイクロチップを時計回りに90[°]回転させるには、回転レバーを反時計回りに180[°]回転させる必要があるため、作業者は、回転レバーを回転させながらマイクロチップがどれぐらい回転したかを目視により確認し位置決めを行わなければならず、マイクロチップの姿勢を所定の回転角度位置に正確に変更することが困難であるという問題があった。正確な回転が実現できない場合は、十分な測定結果が得られないばかりか、チップ保持部の破損やマイクロチップの脱落といった障害につながる可能性がある。
【0008】
そこで、第2回転体の回転軸にレゾルバ等の回転センサを設け、作業者は、回転センサの検出結果を見ながらマイクロチップを回転させる構成が考えられる。
しかしながら、このような構成にあっては、第2回転体が第1回転体上に設けられているため、回転センサの配線を第1回転体の回転軸内を通して外部に取り出さなければならず、配線構造が複雑となるという問題がある。また、遠心分離中にチップ保持部の破損やマイクロチップの脱落といった障害が生じた場合は、回転センサでは破損等までは検出することができないという問題がある。
【0009】
そこで、本発明は、このような従来の技術の有する未解決の課題に着目してなされたものであって、チップの姿勢を正確に変更することができるとともに、配線構造の簡素化を図り、チップ保持部の破損等の障害が発生した場合を判定することができる遠心力付与装置および検体液分析装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
〔発明1〕 上記目的を達成するために、発明1の遠心力付与装置は、所定方向に付与される遠心力に応じて、検体液の成分を分離し、分離後の成分を当該チップの所定位置に案内可能な検体液分析用のチップを、前記所定方向に遠心力が付与される姿勢で保持し回転させることにより、前記チップに対して前記所定方向に遠心力を付与する遠心力付与装置であって、前記所定方向と直交する軸回りに回転可能な第1回転体と、前記第1回転体を回転させる第1回転手段と、前記チップを保持するためのチップ保持部と、前記第1回転体におけるその回転中心から離れた位置に設けられ、前記直交する軸回りに前記チップ保持部を回転可能な第2回転体と、前記第2回転体を回転させる第2回転手段と、前記チップの姿勢を保持し前記第1回転手段により回転を行う第1遠心分離制御、および前記第1遠心分離制御時とは異なる前記第2回転体の回転角度位置で前記チップの姿勢を保持し前記第1回転手段により回転を行う第2遠心分離制御を行う遠心分離制御手段と、前記チップ保持部に設けられ、光反射特性を有する被検出部と、前記チップの姿勢を検出するための前記第1回転体の回転角度位置である姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第1回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第1姿勢センサと、前記姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第2回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第2姿勢センサとを備える。
【0011】
このような構成であれば、チップ保持部にチップを保持し、遠心分離制御手段により、チップの姿勢を保持し第1回転手段により回転を行う第1遠心分離制御が行われる。その結果、第1回転手段により、所定方向と直交する軸回りに第1回転体が回転するが、第2回転体は、第1回転体におけるその回転中心から離れた位置に設けられているので、第1回転体と一体に回転する。そして、チップ保持部も第2回転体と一体に回転する。したがって、チップには、第1回転体の回転により所定方向の遠心力が付与される。
【0012】
第1遠心分離制御が終了すると、第2回転手段により、姿勢検出回転角度位置において、例えば、第1回転角度位置または第2回転角度位置まで第2回転体を回転させる。
このとき、チップの姿勢が第1回転角度位置であると、第1姿勢センサにより、照射された光がチップ保持部の被検出部で反射し、その反射光を受光することができるので、チップの姿勢が第1回転角度位置であることを検出することができる。
【0013】
また、チップの姿勢が第2回転角度位置であると、第2姿勢センサにより、照射された光がチップ保持部の被検出部で反射し、その反射光を受光することができるので、チップの姿勢が第2回転角度位置であることを検出することができる。
さらに、チップ保持部の破損やチップの脱落といった障害が生じた場合は、第2回転手段により、第1回転角度位置または第2回転角度位置の前後を回転させても、第1姿勢センサまたは第2姿勢センサで反射光を受光できず被検出部を検出できないことがあるので、障害が生じたことを判定することができる。
【0014】
その後、遠心分離制御手段により、第1回転角度位置または第2回転角度位置でチップの姿勢を保持し第1回転手段により回転を行う第2遠心分離制御が行われる。その結果、第1回転手段により、所定方向と直交する軸回りに第1回転体が回転し、第2回転体が第1回転体と一体に回転する。そして、チップ保持部も第2回転体と一体に回転する。したがって、チップには、第1回転体の回転により所定方向の遠心力が付与される。
【0015】
所定方向への遠心力の付与により、チップ内では、検体液の成分が分離され、分離後の成分が所定位置に案内される。この状態で、所定位置に対して測定処理を行うことができる。
なお、姿勢検出回転角度位置においてチップの姿勢が第1回転角度位置および第2回転角度位置のいずれでもないと、第1姿勢センサおよび第2姿勢センサで反射光を受光できないので、第1回転角度位置および第2回転角度位置以外の回転角度位置であることを判定することもできる。例えば、第2回転手段が、第1回転角度位置、第2回転角度位置および第3回転角度位置に所定順序で第2回転体を回転させる構成であれば、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて第3回転角度位置を特定することができる。
【0016】
ここで、チップ保持部は、チップを保持するためのものであり、実際にチップを保持していることまでは要しない。以下、発明2の検体液分析装置において同じである。
また、被検出部は、例えば、ミラー、色彩、模様または起伏形状により光反射特性を実現することができる。以下、発明2の検体液分析装置において同じである。
また、第2回転手段は、アクチュエータ等により第2回転体を自動で回転させる構成となっていてもよいし、回転レバー等により第2回転体を手動で回転させる構成となっていてもよい。後者の場合は、第1姿勢センサおよび第2姿勢センサの検出結果を見ながら回転させればよい。以下、発明2の検体液分析装置において同じである。
【0017】
また、第1回転体および第2回転体は、例えば、アームであってもよいし、テーブルやステージであってもよい。また、その形状は、板のように平面的であってもよいし、筐体のように立体的であってもよい。以下、発明2の検体液分析装置において同じである。
また、第1回転手段は、第1回転体の重心位置を回転中心として回転させてもよいし、第1回転体の偏心位置を回転中心として回転させてもよい。以下、発明2の検体液分析装置において同じである。
また、第2回転手段は、第2回転体の重心位置を回転中心として回転させてもよいし、第2回転体の偏心位置を回転中心として回転させてもよい。以下、発明2の検体液分析装置において同じである。
【0018】
〔発明2〕 一方、上記目的を達成するために、発明2の検体液分析装置は、光学的な測定処理を行う測定部を有し、所定方向に付与される遠心力に応じて、検体液の成分を分離し、分離後の成分と試薬とを混合し、試薬混合後の成分を前記測定部に案内可能な検体液分析用のチップを、前記所定方向に遠心力が付与される姿勢で保持し回転させることにより、前記チップに対して前記所定方向に遠心力を付与し、前記測定部に対して前記測定処理を行う検体液分析装置であって、前記所定方向と直交する軸回りに回転可能な第1回転体と、前記第1回転体を回転させる第1回転手段と、前記チップを保持するためのチップ保持部と、前記第1回転体におけるその回転中心から離れた位置に設けられ、前記直交する軸回りに前記チップ保持部を回転可能な第2回転体と、前記第2回転体を回転させる第2回転手段と、前記チップの姿勢を保持し前記第1回転手段により回転を行う第1遠心分離制御、および前記第1遠心分離制御時とは異なる前記第2回転体の回転角度位置で前記チップの姿勢を保持し前記第1回転手段により回転を行う第2遠心分離制御を行う遠心分離制御手段と、前記チップを測定するための前記第1回転体の回転角度位置である測定回転角度位置において前記チップ保持部に保持されたチップの前記測定部に光を照射しかつその透過光を受光可能な測定センサと、前記チップ保持部に設けられ、光反射特性を有する被検出部と、前記チップの姿勢を検出するための前記第1回転体の回転角度位置である姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第1回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第1姿勢センサと、前記姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第2回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第2姿勢センサとを備える。
【0019】
このような構成であれば、チップ保持部にチップを保持し、遠心分離制御手段により、チップの姿勢を保持し第1回転手段により回転を行う第1遠心分離制御が行われる。その結果、第1回転手段により、所定方向と直交する軸回りに第1回転体が回転するが、第2回転体は、第1回転体におけるその回転中心から離れた位置に設けられているので、第1回転体と一体に回転する。そして、チップ保持部も第2回転体と一体に回転する。したがって、チップには、第1回転体の回転により所定方向の遠心力が付与される。
【0020】
第1遠心分離制御が終了すると、第2回転手段により、姿勢検出回転角度位置において、例えば、第1回転角度位置または第2回転角度位置まで第2回転体を回転させる。
このとき、チップの姿勢が第1回転角度位置であると、第1姿勢センサにより、照射された光がチップ保持部の被検出部で反射し、その反射光を受光することができるので、チップの姿勢が第1回転角度位置であることを検出することができる。
【0021】
また、チップの姿勢が第2回転角度位置であると、第2姿勢センサにより、照射された光がチップ保持部の被検出部で反射し、その反射光を受光することができるので、チップの姿勢が第2回転角度位置であることを検出することができる。
さらに、チップ保持部の破損やチップの脱落といった障害が生じた場合は、第2回転手段により、第1回転角度位置または第2回転角度位置の前後を回転させても、第1姿勢センサまたは第2姿勢センサで反射光を受光できず被検出部を検出できないことがあるので、障害が生じたことを判定することができる。
【0022】
その後、遠心分離制御手段により、第1回転角度位置または第2回転角度位置でチップの姿勢を保持し第1回転手段により回転を行う第2遠心分離制御が行われる。その結果、第1回転手段により、所定方向と直交する軸回りに第1回転体が回転し、第2回転体が第1回転体と一体に回転する。そして、チップ保持部も第2回転体と一体に回転する。したがって、チップには、第1回転体の回転により所定方向の遠心力が付与される。
【0023】
所定方向への遠心力の付与により、チップ内では、検体液の成分が分離され、分離後の成分と試薬とが混合され、試薬混合後の成分が測定部に案内される。この状態で、第1回転手段により測定回転角度位置まで回転させると、測定センサにより、照射された光がチップの測定部を透過し、その透過光を受光することができるので、測定部に対して測定処理を行うことができる。
【0024】
なお、姿勢検出回転角度位置においてチップの姿勢が第1回転角度位置および第2回転角度位置のいずれでもないと、第1姿勢センサおよび第2姿勢センサで反射光を受光できないので、第1回転角度位置および第2回転角度位置以外の回転角度位置であることを判定することもできる。例えば、第2回転手段が、第1回転角度位置、第2回転角度位置および第3回転角度位置に所定順序で第2回転体を回転させる構成であれば、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて第3回転角度位置を特定することができる。
【0025】
また、第2遠心分離制御のために、第1回転角度位置または第2回転角度位置まで第2回転体を回転させる場合に限らず、例えば、測定回転角度位置において測定センサの測定範囲に測定部が属することとなるように、第2回転手段により、姿勢検出回転角度位置において第1回転角度位置または第2回転角度位置まで第2回転体を回転させてもよい。
【0026】
〔発明3〕 さらに、発明3の検体液分析装置は、発明2の検体液分析装置において、前記チップ保持部の回転軸方向に鍔状に突出して前記チップ保持部の外周の異なる箇所に設けられた2つの前記被検出部を備え、前記第1姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第1回転角度位置であるときに一方の前記被検出部に、前記チップの姿勢が前記第2回転体の第3回転角度位置であるときに他方の前記被検出部に光を照射しかつその反射光を受光可能であり、前記第2姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第2回転角度位置であるときに前記一方の被検出部に、前記チップの姿勢が前記第1回転角度位置であるときに前記他方の被検出部に光を照射しかつその反射光を受光可能である。
【0027】
このような構成であれば、姿勢検出回転角度位置においてチップの姿勢が第1回転角度位置であると、第1姿勢センサにより、照射された光が一方の被検出部で反射し、その反射光を受光することができるとともに、第2姿勢センサにより、照射された光が他方の被検出部で反射し、その反射光を受光することができるので、チップの姿勢が第1回転角度位置であることを検出することができる。
【0028】
また、姿勢検出回転角度位置においてチップの姿勢が第2回転角度位置であると、第2姿勢センサにより、照射された光が一方の被検出部で反射し、その反射光を受光することができるが、第1姿勢センサでは反射光を受光できないので、チップの姿勢が第2回転角度位置であることを検出することができる。
また、姿勢検出回転角度位置においてチップの姿勢が第3回転角度位置であると、第1姿勢センサにより、照射された光が他方の被検出部で反射し、その反射光を受光することができるが、第2姿勢センサでは反射光を受光できないので、チップの姿勢が第3回転角度位置であることを検出することができる。
【0029】
なお、姿勢検出回転角度位置においてチップの姿勢が第1回転角度位置、第2回転角度位置および第3回転角度位置のいずれでもないと、第1姿勢センサおよび第2姿勢センサで反射光を受光できないので、第1回転角度位置、第2回転角度位置および第3回転角度位置以外の回転角度位置であることを判定することもできる。例えば、第2回転手段が、第1回転角度位置、第2回転角度位置、第3回転角度位置および第4回転角度位置に所定順序で第2回転体を回転させる構成であれば、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて第4回転角度位置を特定することができる。
【0030】
〔発明4〕 さらに、発明4の検体液分析装置は、発明2の検体液分析装置において、前記チップ保持部の回転軸方向に鍔状に突出して前記チップ保持部の外周の異なる箇所に設けられた2つの前記被検出部を備え、前記第1姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第1回転角度位置であるときに一方の前記被検出部に、前記チップの姿勢が前記第2回転角度位置であるときに他方の前記被検出部に光を照射しかつその反射光を受光可能であり、前記第2姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第2回転角度位置であるときに前記一方の被検出部に、前記チップの姿勢が前記第2回転体の第3回転角度位置であるときに前記他方の被検出部に光を照射しかつその反射光を受光可能である。
【0031】
このような構成であれば、姿勢検出回転角度位置においてチップの姿勢が第1回転角度位置であると、第1姿勢センサにより、照射された光が一方の被検出部で反射し、その反射光を受光することができるが、第2姿勢センサでは反射光を受光できないので、チップの姿勢が第1回転角度位置であることを検出することができる。
また、姿勢検出回転角度位置においてチップの姿勢が第2回転角度位置であると、第1姿勢センサにより、照射された光が他方の被検出部で反射し、その反射光を受光することができるとともに、第2姿勢センサにより、照射された光が一方の被検出部で反射し、その反射光を受光することができるので、チップの姿勢が第2回転角度位置であることを検出することができる。
【0032】
また、姿勢検出回転角度位置においてチップの姿勢が第3回転角度位置であると、第2姿勢センサにより、照射された光が他方の被検出部で反射し、その反射光を受光することができるが、第1姿勢センサでは反射光を受光できないので、チップの姿勢が第3回転角度位置であることを検出することができる。
なお、姿勢検出回転角度位置においてチップの姿勢が第1回転角度位置、第2回転角度位置および第3回転角度位置のいずれでもないと、第1姿勢センサおよび第2姿勢センサで反射光を受光できないので、第1回転角度位置、第2回転角度位置および第3回転角度位置以外の回転角度位置であることを判定することもできる。例えば、第2回転手段が、第1回転角度位置、第2回転角度位置、第3回転角度位置および第4回転角度位置に所定順序で第2回転体を回転させる構成であれば、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて第4回転角度位置を特定することができる。
【0033】
〔発明5〕 さらに、発明5の検体液分析装置は、発明3および4のいずれか1の検体液分析装置において、前記第1遠心分離制御は、前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のいずれかで前記チップの姿勢を保持し前記第1回転手段により前記第1回転体を所定回数回転させる第1分離回転制御からなり、前記第2遠心分離制御は、前記第1回転手段により前記姿勢検出回転角度位置まで前記第1回転体を回転させ、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記第2回転手段により、前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のうち前記第1分離回転制御時とは異なる回転角度位置に前記チップの姿勢を変更する姿勢制御と、前記姿勢制御で変更後の姿勢を保持し前記第1回転手段により前記第1回転体を所定回数回転させる第2分離回転制御とからなる。
【0034】
このような構成であれば、遠心分離制御手段により、第1遠心分離制御として第1分離回転制御が行われる。
第1分離回転制御では、第1回転角度位置、第2回転角度位置および第3回転角度位置のいずれかでチップの姿勢が保持されて第1回転手段により第1回転体が所定回数回転する。
【0035】
次いで、遠心分離制御手段により、第2遠心分離制御として姿勢制御および第2分離回転制御が行われる。
姿勢制御では、第1回転手段により姿勢検出回転角度位置まで第1回転体が回転し、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて、第2回転手段により、第1回転角度位置、第2回転角度位置および第3回転角度位置のうち第1分離回転制御時とは異なる回転角度位置にチップの姿勢が変更される。
そして、第2分離回転制御では、変更後の姿勢が保持されて第1回転手段により第1回転体が所定回数回転する。
【0036】
〔発明6〕 さらに、発明6の検体液分析装置は、発明5の検体液分析装置において、前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のうちいずれか2つは、前記測定回転角度位置において前記測定センサの第1測定範囲に前記測定部が属することとなる第1測定姿勢回転角度位置と、前記測定回転角度位置において前記測定センサの第2測定範囲に前記測定部が属することとなる第2測定姿勢回転角度位置とであり、さらに、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記第2回転手段により前記第1測定姿勢回転角度位置に前記チップの姿勢を変更し、前記第1回転手段により前記測定回転角度位置まで前記第1回転体を回転させ、前記測定センサにより前記測定処理を行う第1測定制御、並びに、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記第2回転手段により前記第2測定姿勢回転角度位置に前記チップの姿勢を変更し、前記第1回転手段により前記測定回転角度位置まで前記第1回転体を回転させ、前記測定センサにより前記測定処理を行う第2測定制御を行う測定制御手段を備える。
このような構成であれば、測定制御手段により第1測定制御が行われる。
【0037】
第1測定制御では、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて、第2回転手段により第1測定姿勢回転角度位置にチップの姿勢が変更され、第1回転手段により測定回転角度位置まで第1回転体が回転する。測定回転角度位置では、測定センサの第1測定範囲に測定部が属することとなるので、測定センサの第1測定範囲で測定部に対して1回目の測定処理が行われる。
次いで、測定制御手段により第2測定制御が行われる。
【0038】
第2測定制御では、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて、第2回転手段により第2測定姿勢回転角度位置にチップの姿勢が変更され、第1回転手段により測定回転角度位置まで第1回転体が回転する。測定回転角度位置では、測定センサの第2測定範囲に測定部が属することとなるので、測定センサの第2測定範囲で測定部に対して2回目の測定処理が行われる。このとき、測定センサにおいて、例えば、第1測定範囲および第2測定範囲でセンサ特性を異ならせておけば、第2測定制御では、第1測定制御とは異なる測定結果を得ることができる。
【0039】
〔発明7〕 さらに、発明7の検体液分析装置は、発明5および6のいずれか1の検体液分析装置において、前記遠心分離制御手段は、前記第1姿勢センサまたは前記第2姿勢センサの検出結果に基づいて前記姿勢検出回転角度位置で前記第1回転体を停止させる。
このような構成であれば、遠心分離制御手段により、第1姿勢センサまたは第2姿勢センサの検出結果に基づいて姿勢検出回転角度位置で第1回転体が停止する。
【0040】
〔発明8〕 さらに、発明8の検体液分析装置は、発明5ないし7のいずれか1の検体液分析装置において、さらに、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記チップの姿勢が、前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のいずれかであることを判定できないときは、前記第1遠心分離制御または前記第2遠心分離制御を禁止する制御禁止手段を備える。
【0041】
このような構成であれば、チップ保持部の破損やチップの脱落といった障害が生じた場合は、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて、チップの姿勢が、第1回転角度位置、第2回転角度位置および第3回転角度位置のいずれかであることを判定できないので、制御禁止手段により、第1遠心分離制御または第2遠心分離制御が禁止される。
【0042】
ここで、制御の禁止には、第1遠心分離制御または第2遠心分離制御を中断すること、および第1遠心分離処理または第2遠心分離制御を開始しないことを含む。
また、制御の禁止は、受動的または能動的に禁止することが含まれる。受動的な禁止とは、第1遠心分離制御または第2遠心分離制御を中断する場合、例えば、第1遠心分離制御または第2遠心分離制御を行うことを示す制御信号を与えないようにすることをいう。能動的な禁止とは、第1遠心分離制御または第2遠心分離制御を中断する場合、例えば、第1遠心分離制御または第2遠心分離制御を中断することを示す制御信号を与えることをいう。
【0043】
〔発明9〕 さらに、発明9の検体液分析装置は、発明2ないし8のいずれか1の検体液分析装置において、さらに、前記第2回転手段に駆動力を伝達する駆動力伝達手段を備え、前記駆動力伝達手段は、回転駆動手段と、前記回転駆動手段の回転駆動により回転するカムと、前記カムに従動して直線方向に変位可能なシャフトと、前記シャフトの先端に取り付けられたプッシャとを有し、前記第2回転手段は、前記プッシャの直進移動を回転運動に変換することにより前記第2回転体を回転させる。
【0044】
このような構成であれば、回転駆動手段が駆動すると、回転駆動手段の駆動力によりカムが回転し、カムに従動してシャフトが直進移動する。これに伴って、プッシャが直進移動し、第2回転手段により、プッシャの直進移動が回転運動に変換されて第2回転体が回転する。
【0045】
〔発明10〕 さらに、発明10の検体液分析装置は、発明2ないし9のいずれか1の検体液分析装置において、さらに、前記チップ保持部の回転軌跡外の位置から前記測定回転角度位置まで前記測定センサを移動させる移動手段を備え、前記移動手段は、回転駆動手段と、前記回転駆動手段の回転駆動により回転する円盤と、前記円盤の盤面上に一端が固定されたコネクティングロッドと、前記コネクティングロッドの他端に連結し前記測定センサの移動方向に変位可能なシャフトと、前記シャフトの先端に取り付けられた伝達部材とを有し、前記伝達部材の直進移動により前記測定センサを移動させる。
【0046】
このような構成であれば、回転駆動手段が駆動すると、回転駆動手段の駆動力により円盤が回転し、円盤に従動してコネクティングロッドの一端が回転する。これに伴って、シャフトおよび伝達部材が一体に測定センサの移動方向に直進移動し、伝達部材の直進移動により、チップ保持部の回転軌跡外の位置から測定回転角度位置まで測定センサが移動する。
【発明の効果】
【0047】
以上説明したように、発明1の遠心力付与装置、または発明2の検体液分析装置によれば、第1姿勢センサまたは第2姿勢センサにより、チップの姿勢が第1回転角度位置または第2回転角度位置であることを検出することができるので、従来に比して、チップの姿勢を正確に変更することができるという効果が得られる。また、第1姿勢センサおよび第2姿勢センサは、チップ保持部の被検出部に光を照射してその反射光を受光する構成となっているので、第1回転体および第2回転体の外部に設置することができ、配線構造の簡素化を図ることができるという効果も得られる。さらに、チップ保持部の破損やチップの脱落といった障害が生じた場合は、第2回転手段により、第1回転角度位置または第2回転角度位置の前後を回転させても、第1姿勢センサまたは第2姿勢センサで反射光を受光できず被検出部を検出できないことがあるので、障害が生じたことを判定することができるという効果も得られる。
【0048】
一方、発明2の検体液分析装置によれば、チップの姿勢を正確に変更することができるので、測定結果が不十分となる可能性を低減することができるという効果が得られる。
さらに、発明3または4の検体液分析装置によれば、第1回転角度位置、第2回転角度位置および第3回転角度位置を検出することができるので、第1回転角度位置、第2回転角度位置および第3回転角度位置のいずれかにチップの姿勢を正確に変更することができるという効果が得られる。
【0049】
さらに、発明5の検体液分析装置によれば、第1姿勢センサおよび第2姿勢センサの検出結果に基づいて、第2回転手段により、第1回転角度位置、第2回転角度位置および第3回転角度位置のいずれかにチップの姿勢が変更されるので、チップの姿勢をさらに正確に変更することができるという効果が得られる。
さらに、発明6の検体液分析装置によれば、測定回転角度位置において測定センサの測定範囲に測定部が属することとなる回転角度位置にチップの姿勢が変更され、測定回転角度位置まで第1回転体が回転し、測定センサにより測定処理が行われるので、測定処理を行うためにチップの姿勢を手動で変更しなくてもすむという効果が得られる。
【0050】
さらに、発明7の検体液分析装置によれば、第1姿勢センサまたは第2姿勢センサを併用して第1回転体の位置決めを行うことができるので、第1回転体に回転センサを別途設けなくてもすむという効果が得られる。
さらに、発明8の検体液分析装置によれば、チップ保持部の破損やチップの脱落といった障害が生じた場合は、第1遠心分離制御または第2遠心分離制御が禁止されるので、安全性を向上することができるという効果が得られる。
【0051】
さらに、発明9の検体液分析装置によれば、プッシャの直進速度の調整が可能となり、チップの回転時の衝撃を低減することができるという効果が得られる。
さらに、発明10の検体液分析装置によれば、測定センサの移動時にのみ回転駆動手段を駆動すればよいので、発熱を抑えることができ、装置内温度管理を精密に行うことができるという効果が得られる。
【発明を実施するための最良の形態】
【0052】
〔第1の実施の形態〕
以下、本発明の第1の実施の形態を図面を参照しながら説明する。図1ないし図28は、本発明に係る遠心力付与装置および検体液分析装置の第1の実施の形態を示す図である。
本実施の形態は、本発明に係る遠心力付与装置および検体液分析装置を、検体液を遠心分離し分析する場合について適用したものである。
【0053】
まず、検体液分析装置100の概略構成を説明する。
図1は、検体液分析装置100の概略構成を示す斜視図である。
図2は、検体液分析装置100の概略構成を示す平面図である。
検体液分析装置100は、図1(a)、(b)に示すように、中空構造の基台1と、基台1に配設された、マイクロチップ200に遠心力を付与する遠心力付与装置2と、基台1に配設された、マイクロチップ200の測定部200aに対してレーザ光を照射しかつ測定部200aを透過したレーザ光(以下、透過光という。)を受光する光学式測定装置3と、基台1の垂直方向の下部に基台1と内部空間を共有して装着された、装置内の温度を一定となるように調整する温度調整装置4と、基台1の上面部を覆う、上面部に対して外界からの光を遮断する遮光カバー5とを有して構成されている。
【0054】
また、図2に示すように、基台1の上面部を形成するプレート(以下、上部プレートという。)には、その長尺方向を左右方向とし、短尺方向を前後方向とすると、左寄りに遠心力付与装置2が配設され、その右隣に光学式測定装置3が配設されている。さらに、上部プレートの前方側の辺に沿って温度調整用の通風口10(矩形)、16(円形)がそれぞれ設けられ、上部プレートの後方側の辺に沿って温度調整用の通風口11(矩形)、17(矩形)がそれぞれ設けられている。
【0055】
また、基台1の内部に面した上部プレートの下面における通風口10の近傍には、通風口10を覆う矩形のプレートが開閉可能に取り付けられた構成の開閉シャッタ15が設けられており、開閉シャッタ15を開閉させることで、通風口10の開口部の面積を変化させて、基台1の上面部へと流入する空気の通風量を調整することが可能となっている。
さらに、上部プレートには、遠心力付与装置2の後方側に、センサ設置用のプレート12が立設されており、プレート12には、フォトリフレクタ等の反射型の光学式の姿勢センサ13、14が、その検出方向を遠心力付与装置2側に向けて取り付けられている。
【0056】
次に、遠心力付与装置2の構成を説明する。
図3は、遠心力付与装置2の概略構成を示す正面図である。
遠心力付与装置2は、図3に示すように、板面矩形の板状部材から構成される回転アーム20と、回転アーム20の回転軸であるアーム回転軸21と、アーム回転軸21に回転駆動力を付与するアーム回転機構22とを有して構成されている。
【0057】
アーム回転軸21は、上部プレートに設けられた垂直方向の軸穴に軸受(例えば、転がり軸受)を介して挿通され、上部プレートに対して、垂直方向の軸回りに回転可能に支持されている。アーム回転軸21の上端には、その軸心位置と回転アーム20の重心位置とを一致させて回転アーム20が接合され、アーム回転軸21の下端には、アーム回転機構22を構成する回転駆動源の出力軸が連結されている。
【0058】
遠心力付与装置2は、さらに、回転アーム20の長尺方向の一端および他端に貫通して設けられた垂直方向の軸穴に、それぞれ、チップ回転台23の回転軸である回転台回転軸24が、軸受(不図示)を介して垂直方向の軸回りに回転可能にかつ垂直方向に移動不能に貫装されている。回転台回転軸24の上端には、その軸心位置とチップ回転台23の重心位置とを一致させてチップ回転台23が接合されている。また、回転台回転軸24の下端側の一部は、回転台回転軸24を回転駆動する回転台回転機構25のケース内に挿入されている。
【0059】
チップ回転台23上には、マイクロチップ200を保持するチップ保持部26がチップ回転台23とともに回転可能に設けられている。
遠心力付与装置2は、さらに、回転台回転機構25に回転台回転軸24の回転力を発生させるための動力を伝達する回転台駆動力伝達機構27を有して構成されている。
回転台駆動力伝達機構27は、ソレノイドの駆動力によりプッシャ27gを上方へと直進移動させ、回転アーム20の長尺方向と上部プレートの長尺方向とが直交する回転角度位置(以下、姿勢検出回転角度位置という。)に停止している回転台回転機構25の伝達部25cを突き上げることで、回転台回転機構25に上方向の直進運動力を伝達する構成を有している。
【0060】
図4は、遠心力付与装置2の遠心力付与時の回転バランスを均衡させる構成を示す図である。同図(a)は、遠心力付与装置2の平面図であり、同図(b)、(c)は、遠心力付与装置2の正面図である。
遠心力付与装置2は、図4(a)に示すように、回転アーム20の長尺方向の両端における回転アーム20の重心位置に対して左右対称の位置に、チップ回転台23、回転台回転軸24、回転台回転機構25およびチップ保持部26を含むマイクロチップ200の姿勢を変更するチップ回転機構部をそれぞれ設けて構成されている。両方のチップ回転機構部は、同じ重量に調整されている。
【0061】
これにより、遠心力付与装置2は、図4(b)、(c)に示すように、回転アーム20の両端にあるチップ保持部26にマイクロチップ200をそれぞれ装着することで、両端にかかる重量を略同一にすることができ、重量的なバランスを平衡に保つことができる。したがって、回転アーム20をバランスの安定した状態で高速に回転させることができる。
【0062】
また、2つのマイクロチップ200に対して同時に遠心力を付与することができるので、大量のマイクロチップ200に対して効率よく遠心力の付与処理を行うことができる。
なお、2つ同時に遠心力を付与する構成にする必要がないときは、例えば、一方のチップ回転機構部を、他方の分析を行う側のチップ回転機構部と重量を合わせるだけで簡易な構成としてもよい。この場合は、例えば、様々な種類の(例えば、形状は同じで重量は異なる)マイクロチップに適用することを想定するならば、一方のチップ回転機構部には、チップ保持部26だけは設け、チップ保持部26に対して、マイクロチップ200と同じ重量のダミーチップを装着させることで、他方のチップ回転機構部と重量バランスをとる構成とする。また、一定重量のマイクロチップ専用とする場合は、マイクロチップの重さも含んだ重量で一方のチップ回転機構部を構成してもよい。これにより、より簡易な構成とすることができる。
【0063】
これらの構成により、重量バランスを平衡に保つことができるとともに、マイクロチップに対して遠心力の付与を行わない側のチップ回転機構部にかかるコストを低減することができる。
【0064】
次に、アーム回転機構22の構成を説明する。
図5は、アーム回転機構22の構成を示すブロック図である。
アーム回転機構22は、図5に示すように、アーム回転軸21の回転駆動源であるステッピングモータ22aと、ステッピングモータ22aを駆動する駆動回路22bとを有して構成されている。
ステッピングモータ22aは、HB型(Hybrid Type)の2相励磁方式のモータであり、駆動回路22bから供給される相電流によって各極を構成する2つのコイルを順次励磁し、モータ出力軸(回転子)を回転駆動する。
【0065】
ステッピングモータ22aは、さらに、マイクロチップ200の姿勢変更時や光学式測定装置3による測定処理時等において、所定の回転角度位置で停止した状態を保持する保持トルクを発生させるために、保持電流を流す機能を有している。
駆動回路22bは、スイッチング回路から構成され、基台1の内部に配設されたモータ電源(不図示)から電力を得るとともに、基台1の内部に配設された制御基板(後述)から供給される制御信号(パルス信号)に応じて回路をON/OFFし、ONの時に、ステッピングモータ22aの極を構成する2つのコイルに対して回転アーム20の回転に必要な相電流を供給する。
【0066】
また、モータ出力軸(モータ外部に減速機構を有する場合は減速後の出力軸)とアーム回転軸21とはカップリング等により直結されており、モータ出力軸の回転力はアーム回転軸21にダイレクトに伝達される。
以上の構成により、遠心力付与装置2は、ステッピングモータ22aがモータ出力軸を回転駆動して、モータ出力軸の回転力がアーム回転軸21に伝達されると、アーム回転軸21が回転し、この回転に連動して、回転アーム20がその重心位置を回転中心として垂直方向の軸回りに回転する。
なお、遠心力付与装置2は、回転アーム20を時計回り方向に回転して、マイクロチップ200に遠心力を付与するように制御される。
【0067】
次に、マイクロチップ200の構成を説明する。
図6は、マイクロチップ200の形状例を示す図である。
マイクロチップ200は、図6に示すように、平面視すると正方形状となっており、検体液溜め、試薬溜め、秤量部、試薬混合部、測定部200a、遠心分離用および検体液の案内用のマイクロキャピラリ流路等が形成された複数の基板を積層して構成されている。
【0068】
マイクロチップ200は、レーザ光を透過させる特性を有した材料を用いて形成されている。例えば、ポリエチレン(PE)、ポリプロピレン(PP)等のオレフィン樹脂、ポリエチレンテレフタレート(PET)、ポリブチレンテレフタレート(PBT)等のポリエステル樹脂、ナイロン6、ナイロン66等のポリアミド樹脂、塩化ビニル樹脂、フッ素樹脂等の公知の樹脂で形成されている。
測定部200aは、マイクロチップ200の右辺に沿って設けられ、光学式測定装置3において試薬と混合された分離成分に対して測定処理を行うための3つの測定ポイントを有する。
【0069】
次に、チップ保持部26の構成を説明する。
図7は、チップ保持部26の構造例を示す図である。同図(a)は、チップ保持部26の平面図であり、同図(b)は、チップ保持部26の側面図である。
チップ保持部26は、図7(a)、(b)に示すように、マイクロチップ200を内嵌可能な枠部26aを有し、枠部26aの辺上(図7(a)では左辺中央)に、チップ押さえ部26bが設けられた構成となっている。
【0070】
チップ押さえ部26bは、図7(b)に示すように、押さえ部材26b1に矩形の板ばね26b2の長尺方向の一端を支持(例えば、ネジ止め)し、板ばね26b2の長尺方向の他端がチップ回転台23に支持された構造となっている。そして、マイクロチップ200の装着時に、押さえ部材26b1の下端部が、マイクロチップ200の上面の一部を上方から押さえ付けるようになっている。
【0071】
チップ保持部26には、枠部26aの第1辺(図7(a)では後方側の辺右方)の外周面に鍔状の被検出部26cが、枠部26aの第1辺の右隣の第2辺(図7(a)では右辺下方)の外周面に鍔状の被検出部26dが上方向に突出して設けられている。被検出部26c、26dは、光反射特性を有する。
被検出部26c、26dは、姿勢センサ13、14の検出対象であり、姿勢検出回転角度位置に回転アーム20が停止しているときに、姿勢センサ13、14によって検出され、制御基板(後述)において、その検出結果に基づいて、回転アーム20の回転角度位置やマイクロチップ200の姿勢が判定され、回転アーム20の位置決めやマイクロチップ200の姿勢変更等の各種制御が行われる。ここで、マイクロチップ200の姿勢とは、チップ保持部26に保持された状態においてチップ保持部26の回転軸回りの姿勢をいう。
したがって、プレート12は、被検出部26c、26dの高さよりも高く形成されており、姿勢センサ13、14は、被検出部26c、26dと同一の高さに設けられている。
【0072】
次に、姿勢センサ13、14によりマイクロチップ200の姿勢を検出する場合の構成を説明する。
図8は、姿勢センサ13、14の検出動作を示す図である。
マイクロチップ200は、チップ保持部26の回転により、垂直方向の軸回りに0[°]、90[°]、180[°]、270[°]の4つの姿勢をとり得る。以下、それら回転角度位置を、正姿勢回転角度位置、右姿勢回転角度位置、逆姿勢回転角度位置および左姿勢回転角度位置と定義する。
【0073】
姿勢検出回転角度位置においてマイクロチップ200の姿勢が正姿勢回転角度位置(0[°])であるときは、図8(a)に示すように、姿勢センサ13は、被検出部26cにレーザ光を照射しかつその反射光を受光することができるとともに、姿勢センサ14は、被検出部26dにレーザ光を照射しかつその反射光を受光することができる。そのため、姿勢センサ13、14はいずれもONのセンサ信号を出力する。したがって、図8(e)に示すように、姿勢センサ13、14のセンサ信号がいずれもONのときは、マイクロチップ200の姿勢が正姿勢回転角度位置であることを検出することができる。
【0074】
姿勢検出回転角度位置においてマイクロチップ200の姿勢が右姿勢回転角度位置(90[°])であるときは、図8(b)に示すように、姿勢センサ13は、その光軸上に被検出部26c、26dが存在しないため反射光を受光できないが、姿勢センサ14は、被検出部26cにレーザ光を照射しかつその反射光を受光することができる。そのため、姿勢センサ13はOFFのセンサ信号を、姿勢センサ14はONのセンサ信号を出力する。したがって、図8(e)に示すように、姿勢センサ13のセンサ信号がOFFで、姿勢センサ14のセンサ信号がONのときは、マイクロチップ200の姿勢が右姿勢回転角度位置であることを検出することができる。
【0075】
姿勢検出回転角度位置においてマイクロチップ200の姿勢が逆姿勢回転角度位置(180[°])であるときは、図8(c)に示すように、姿勢センサ13、14はいずれも、その光軸上に被検出部26c、26dが存在しないため反射光を受光できない。そのため、姿勢センサ13、14はいずれもOFFのセンサ信号を出力する。したがって、図8(e)に示すように、姿勢センサ13、14のセンサ信号がいずれもOFFのときは、マイクロチップ200の姿勢が逆姿勢回転角度位置であることを検出することができる。
【0076】
姿勢検出回転角度位置においてマイクロチップ200の姿勢が左姿勢回転角度位置(270[°])であるときは、図8(d)に示すように、姿勢センサ13は、被検出部26dにレーザ光を照射しかつその反射光を受光することができるが、姿勢センサ14は、その光軸上に被検出部26c、26dが存在しないため反射光を受光できない。そのため、姿勢センサ13はONのセンサ信号を、姿勢センサ14はOFFのセンサ信号を出力する。したがって、図8(e)に示すように、姿勢センサ13のセンサ信号がONで、姿勢センサ14のセンサ信号がOFFのときは、マイクロチップ200の姿勢が左姿勢回転角度位置であることを検出することができる。
【0077】
次に、マイクロチップ200の装着方法を説明する。
図9は、マイクロチップ200の装着例を示す図である。同図(a)、(b)は、マイクロチップ200およびチップ保持部26の側面図であり、同図(c)は、マイクロチップ200およびチップ保持部26の平面図である。
マイクロチップ200をチップ保持部26に装着するときは、図9(a)に示すように、板ばね26b2を外側に弓なりに弾性変形させ、マイクロチップ200を枠部26aと平行に枠部26aの上部に持っていき、図9(b)に示すように、全体を枠部26aの枠内へと垂直に押し込み、その後、板ばね26b2の弾性変形を解除する。
【0078】
これにより、マイクロチップ200は、図9(c)に示すように、枠部26aの内周に嵌合するとともに、チップ押さえ部26bにより上方から押圧された状態でチップ保持部26に固定される。したがって、マイクロチップ200がどのような回転角度位置にあっても、遠心力の付与中に遠心力によってマイクロチップ200がチップ保持部26から脱離するのを防止でき、かつ、振動等によって浮上方向に力が発生しても、押さえ部材26bによってマイクロチップ200を浮上し難くできる。
【0079】
次に、回転台回転機構25の構成を説明する。
図10は、回転台回転機構25の構成を示す側面図である。
回転台回転機構25は、図10に示すように、チップ回転台23の下方、回転アーム20の下面に固定支持されており、内周が円筒形状のケース内に、回転台回転軸24の一部が上方から挿入された構成となっている。ケースの上面は回転アーム20の下面部で蓋をした構成となっており、ケースの下面部には開口部が設けられている。
【0080】
ケース内には、回転台回転軸24を回転させる円筒形状のカム25aが設けられている。カム25aは、その内周に回転台回転軸24の一部を挿通し、回転台回転軸24に沿って摺動可能に設けられている。
ケース内の壁には、垂直方向に延びる2つのガイド部25bが水平方向に互いに対向する位置に形成されている。
【0081】
次に、カム25aの構成を説明する。
図11は、カム25aの構成を示す図である。同図(a)は、カム25aの正面図であり、同図(b)は、カム25aの底面図である。
カム25aの円筒形状の上端面には、図11(a)に示すように、円周方向に沿って連続して形成された8つの傾斜面25mと、各傾斜面25mの背面を形成する8つの壁25nとからなる上端カム面25jが形成されている。傾斜面25mは、壁25nの上端を傾斜の頂上とし、この頂上から上端面の時計回り方向に向かって下っていく傾斜を有している。
【0082】
カム25aの円筒形状の下端面には、図11(a)、(b)に示すように、円周方向に沿って連続して形成された8つの傾斜面25pと、後述する下側カム用ピン25eを嵌合する8つのピン嵌合溝25qと、各傾斜面25pの背面を形成する8つの壁25rとからなる下端カム面25oが形成されている。傾斜面25pは、図11(b)に示すように、底面側から見て、図中の「山」の部分が傾斜の頂上となり、そこからピン嵌合溝25qの傾斜側の下端位置を傾斜の終わりとして時計回り方向に変位する傾斜を有している。つまり、下端カム面25oは、上下逆さまに見ると、上端カム面25jの傾斜面25mの向きとは逆の傾斜方向の傾斜面25pが形成されている。なお、図11(a)の視点で見ると、図11(b)に示す「山」の部分は、下端カム面25oの最も下方に位置することになる。
【0083】
ピン嵌合溝25qは、各傾斜面25pとその隣の傾斜面25pの背面となる壁25rとの間に、壁25rの壁面に沿って真っ直ぐ上に向かって形成されたストレートの窪みである。
また、上端カム面25jの各傾斜面25mの傾斜角度と、下端カム面25oの各傾斜面25pの傾斜角度とは、上端カム面25jの方が下端カム面25oよりも大きい角度(傾斜が急になる角度)に形成されている。そのため、上端カム面25jの壁25nの高さは、下端カム面25oの壁25rの高さよりも高くなっている。
【0084】
さらに、カム25aは、各傾斜面25mの頂上となる壁25nの頂上の位置と、各傾斜面25pの頂上となる壁25rの頂上の位置とを、それぞれ所定円周角度(例えば、22.5[°])ずつ周方向にずらして配設している。
さらに、図11(a)、(b)に示すように、カム25aの下端部にはその外周に沿って、円環形状の伝達部25cがカム25aと一体に形成されている。伝達部25cは、その径方向に互いに対向する位置に、ケースの内壁に設けられたガイド部25bと係合する2つの係合溝25tが形成されている。また、伝達部25cの径の長さは、ケース内周の径の長さよりもわずかに短い長さ(略同じ長さ)となっている。
【0085】
そして、図10に示すように、カム25aと一体形成された伝達部25cは、ケースの内壁に設けられた2つのガイド部25bを、伝達部25cの2つの係合溝25tにそれぞれ係合して、カム25aおよび伝達部25cがガイド部25bおよび回転台回転軸24に沿って上下方向に摺動可能にケース内に配設されている。つまり、ガイド部25bによって、カム25aおよび伝達部25cを、これらが回転台回転軸24の軸回りに回転するのを防止しながら上下動させることができる。
【0086】
一方、ケース内に挿入された回転台回転軸24の挿入部分の外周面には、上端カム面25jの上方向の移動範囲内の高さ位置に、2本の上側カム用ピン25dが、回転台回転軸24の円周方向に沿って等間隔にかつ同じ高さ位置に設けられている。さらに、ケース内に挿入された回転台回転軸24の挿入部分の外周面には、下端カム面25oの下方向の移動範囲内の高さ位置に、4本の下側カム用ピン25eが、円周方向にそれぞれ等間隔にかつ同じ高さ位置に設けられている。
【0087】
上側カム用ピン25dは、カム25aが最下端の位置にあるときに、少なくともその上端カム面25jの各傾斜面25mと上側カム用ピン25dとが当接しない高さ位置に設けられている。また、下側カム用ピン25eは、カム25aが最上端の位置に移動したときに、少なくともその下端カム面25oの各傾斜面25pと下側カム用ピン25eとが当接しない高さ位置に設けられ、かつカム25aが最下端の位置に移動したときに、下側カム用ピン25eが、下端カム面25oのピン嵌合溝25qに嵌合する高さ位置に設けられている。つまり、カム25aが最下端の位置にあるときは、図11(b)に示すように、4本の下側カム用ピン25eが、ピン嵌合溝25qに嵌合した状態となる。
【0088】
回転台回転機構25は、図10に示すように、さらに、ケース内に、コイルばね25fと、コイルばね25fの伸縮時の回転による両端部の摺動抵抗を小さくするためのリング状の低摺動部材25g(例えば、フッ素樹脂等の樹脂材料によって作製されたリング形状のスペーサ)とが配設されている。
コイルばね25fは、カム25aおよび伝達部25cをケース内に配設する際に、回転台回転軸24の下端側の一部とカム25aとを内側に挿通して、その上端部を回転アーム20の下面に、下端部を伝達部25cの上面に向けた状態でケース内に配設される。
【0089】
また、コイルばね25fは、コイルばね25fの縮み時の捩れ力による回転方向とばね25fの巻き方向とが同じで、かつばね25fの縮んだ状態から復元時の回転方向とばね25fの巻き方向とは逆の方向とが同じ方向となる構造を有している。これにより、コイルばね25fの両端部の摺動抵抗を低減することができ、滑らかな伸縮動作を行うことができる。
【0090】
低摺動部材25gは、コイルばね25fを設ける際に、回転台回転軸24を内側に挿通して、コイルばね25fの上端部と回転アーム20の下面との間と、コイルばね25fの下端部と伝達部25cの上面との間にそれぞれ介装される部材である。低摺動部材25gを介装することにより、コイルばね25fの巻き方向による摺動抵抗の低減に加え、さらにコイルばね25fの両端部の摺動抵抗を低減することができ、より滑らかな伸縮動作を行うことができるようになる。
【0091】
カム25a、上側カム用ピン25d、下側カム用ピン25eおよび回転台回転軸24を形成する部材は、かじりの発生し難くなる材質の組み合わせで構成している。これら部材の材質の組み合わせとしては、例えば、以下の(A)〜(D)に示す4通りのいずれかを採用することができる。
(A)ナイロンで形成したカム25aと、焼き入れしたS45C等の炭素鋼で形成した上側カム用ピン25dおよび下側カム用ピン25eと、鉄で形成した回転台回転軸24との組み合わせ。
【0092】
(B)SUS304等のステンレスで形成したカム25aと、焼き入れしたS45C等の炭素鋼で形成した上側カム用ピン25dおよび下側カム用ピン25eと、鉄で形成した回転台回転軸24との組み合わせ。
(C)SUS304等のステンレスで形成したカム25aと、焼き入れしたS45C等の炭素鋼で形成した上側カム用ピン25dおよび下側カム用ピン25eと、黄銅(真鍮)で形成した回転台回転軸24との組み合わせ。
(D)FC200等の鋳鉄で形成したカム25aと、焼き入れしたS45C等の炭素鋼で形成した上側カム用ピン25dおよび下側カム用ピン25eと、鉄で形成した回転台回転軸24との組み合わせ。
【0093】
つまり、同じ材質の金属同士を摺動させると、両者の親和性が高くなり「かじり(焼付)」が発生しやすくなるので、カム25a、上側カム用ピン25d、下側カム用ピン25eおよび回転台回転軸24の材質を、上記(A)〜(D)のいずれかの組み合わせとすることで、摺動する部品同士による「かじり」の発生を起こし難くすることができる。
【0094】
次に、回転台駆動力伝達機構27の構成を説明する。
図12は、回転台駆動力伝達機構27の構成を示す垂直方向の断面図である。
回転台駆動力伝達機構27は、図12に示すように、ソレノイド本体27aと、ソレノイドシャフト27bと、ショックアブソーバ27cと、ショックアブソーバ27cを基台1に対して固定支持する支持ブラケット27dと、ソレノイドシャフト27bの下端部と結合された衝撃吸収ブラケット27eと、ソレノイドシャフト27bの先端部に取り付けられた緩衝部材27f(例えば、ゴムスポンジ)と、ソレノイドシャフト27bの先端部に連結されたプッシャ27gとを有して構成されている。
【0095】
ソレノイド本体27aは、非磁性材料で形成されたハウジング内に、コイルと、コイル内に挿入された固定鉄心と、固定鉄心と磁気的に接続されていてコイルを囲む磁性材製の磁気フレームと、ハウジング内に固定鉄心に対して接近および離間移動可能に設けられた可動鉄心とを有して構成されている。
ソレノイドシャフト27bは、ソレノイド本体27aの可動鉄心に設けられた貫通孔に挿通して可動鉄心に対して軸方向に相対移動不能に取り付けられた構成となっている。したがって、コイルに通電して磁束を発生させると、この磁束が可動鉄心を磁化して、可動鉄心を固定鉄心側に引き寄せ、可動鉄心に取り付けられたソレノイドシャフト27bが可動鉄心とともに引き寄せられる。つまり、ソレノイド本体27aの磁気吸引力により、ソレノイドシャフト27bを直進運動させる。
【0096】
回転台駆動力伝達機構27は、基台1の内部に、ソレノイドシャフト27bの先端が、上部プレートに対して直交する方向に上方向を向けて配設されており、ソレノイド本体27aによる磁気吸引力によってソレノイドシャフト27bを上方向に直進運動させ、その先端部に連結されたプッシャ27gによって、この直進運動力を伝達部25cに伝達する。
【0097】
ソレノイドシャフト27bは、力の伝達体であり、その上端側にプッシャ27gが、その下端側に衝撃吸収ブラケット27eが結合されており、ソレノイド本体27aの駆動により、ソレノイドシャフト27bが上方向に直進移動すると、これとともにプッシャ27gおよび衝撃吸収ブラケット27eも上方向に直進移動する。
ショックアブソーバ27cは、シリンダと、シリンダに設けられたロッド穴に挿通されたピストンロッドと、ピストンロッドの後端部が固着され、シリンダ内に往復動可能に設けられたピストン部と、ピストン部の後端部に一端が支持され、他端がシリンダ内後端部に支持された戻り用のコイルばねとを有して構成されている。
【0098】
ショックアブソーバ27cは、さらに、支持ブラケット27dを介して、ピストンロッドの先端を衝撃吸収ブラケット27eに向けた状態で基台1に固定支持されている。
ピストン部は、その周囲をOリング等のリング状のシール部材でシールされており、シリンダ内を移動時に自己の周囲とシリンダ内壁との間を液体が通り抜けるのを防止している。なお、ロッド穴についても外部に液体が漏れないようにOリング等のシール部材でシールしている。
【0099】
ピストン部には、その往復動の方向に常時開通される貫通穴と、ピストン部の移動方向に応じて開通される弁付貫通穴とが設けられている。
弁付貫通穴は、ピストン部がシリンダ内部方向に移動するときに弁を開いて貫通穴内を液体が通り抜けられる状態にし、シリンダ内部方向とは逆方向に移動するときに弁を閉じて液体が通り抜けられない状態にする構造となっている。
【0100】
これにより、ピストン部がシリンダ内部方向に移動するときは、常時開通している貫通穴と弁付貫通穴とを、シリンダ内に封入された液体を通り抜けさせながら移動し、液体が両貫通穴を通り抜けるときの抵抗力によってピストンロッドに加えられた衝撃を吸収する。
また、ピストンロッドのシリンダ内部方向への移動によってピストン部がシリンダ内を移動すると、その力を受けて戻り用のコイルばねが縮む。そして、ピストンロッドに加わる力がなくなると、コイルばねの復元力によって、ピストン部が逆方向へと押され、これにより弁付貫通穴の弁が閉じるので、ピストン部は、常時開通している貫通穴のみに液体を通り抜けさせながらシリンダ内を移動し、ピストンロッドおよびピストン部を初期位置へと復帰させる。
【0101】
衝撃吸収ブラケット27eは、ソレノイドシャフト27bの上方向への直進移動とともに、基台1側に固定支持されたショックアブソーバ27cのピストンロッドの先端に向かって直進移動し、かつピストンロッドの先端に衝突するように構成されている。
ソレノイドシャフト27bの先端部には、緩衝部材27fが取り付けられており、プッシャ27gが伝達部25cに衝突したときに、その衝突による衝撃を吸収する。
【0102】
プッシャ27gは、その先端部に円筒形状の凸部が形成されており、突き上げ動作時には、円筒形状の凸部における円環状の上端面が伝達部25cの円環状の下面と当接して伝達部25cを突き上げる。これにより、伝達部25cと一体形成されたカム25aに上方向の直進移動力を伝達する。また、プッシャ27gは、その先端部の外径が伝達部25cの径と同じまたは略同じ大きさで構成され、内径が少なくとも回転台回転軸24の径より大きく構成されている。
【0103】
以上の構成により、ソレノイドシャフト27bが直進移動すると、衝撃吸収ブラケット27eがピストンロッドの先端部に衝突し、この衝突力によってピストン部が貫通穴に液体を通しながらシリンダ内を移動する。このときの抵抗力によって、衝突による衝撃が吸収され、ソレノイドシャフト27bは、衝撃の吸収された状態で、ソレノイドシャフト27bを上方向に直進移動させて、その先端のプッシャ27gを、伝達部25cに衝突させる。このとき、緩衝部材27fによって衝突時の衝撃が緩和される。また、プッシャ27gの先端部における凸部の内側に形成される窪みによって、突き上げ動作時に、窪み内に回転台回転軸24の下端部を逃がすことができ、プッシャ27gと回転台回転軸24の下端部とを接触させずに、伝達部25cに力を伝達することができる。
【0104】
また、姿勢検出回転角度位置で回転アーム20を停止させたときの、上部プレートにおける、回転アーム20の後端側の回転台回転機構25のケース下面に形成された開口部の真下の位置には、プッシャ27gが往復動可能な径の貫通穴が設けられている。この貫通穴は、回転台回転軸24の軸心を円の中心とした円筒形状を有している。そして、回転台駆動力伝達機構27は、プッシャ27gの中心と貫通穴の中心とを一致させた状態でプッシャ27gを貫通穴に挿通して、上部プレートにおける姿勢検出回転角度位置の下面側に配設されている。なお、ソレノイドシャフト27bおよびプッシャ27gは、ソレノイド本体27aの停止時の初期位置において、プッシャ27gの全体が、姿勢検出回転角度位置に設けられた貫通穴内に収まるように配設されている。
【0105】
図13は、プッシャ27gで突き上げ時の回転台回転機構25の動作を示す図である。
上記構成によって、回転アーム20が姿勢検出回転角度位置で停止した状態において、制御基板(後述)からの制御信号が入力されると、回転台駆動力伝達機構27は、制御信号に応じてソレノイド本体27aを駆動する。これにより、ソレノイドシャフト27bが上方向に直進移動し、その上端部に連結されたプッシャ27gを上方向に移動させる。このとき、ショックアブソーバ27cのピストンロッドに衝撃吸収ブラケット27eが衝突し、ソレノイドシャフト27bの直進移動時の衝撃が一部吸収される。ソレノイドシャフト27bは、ショックアブソーバ27cにおいて衝撃が吸収された状態で、上部プレートに設けられた貫通穴を通り、回転台回転機構25のケース下面の開口部を通って、伝達部25cの下面部へと到達する。
【0106】
一方、回転台回転機構25は、図13(a)に示すように、4本の下側カム用ピン25eが下端カム面25oのピン嵌合溝25qにそれぞれ嵌合した状態となっている。すなわち、カム25aは伝達部25cとともに最下端に位置した状態となっている。
この状態において、ソレノイドシャフト27bの直進移動により、プッシャ27gの円環状の凸部端面が、伝達部25cの円環状の下面に上方向に向かって衝突すると、その突き上げ力が伝達部25cと一体形成されたカム25aに伝達され、図13(b)に示すように、ガイド部25bに沿って、伝達部25cとともにカム25aを、回転させることなく回転台回転軸24に沿って上方向へと直進移動させる。この直進移動によって、2本の上側カム用ピン25dが、上端カム面25jに形成された8つの傾斜面25mのうち対応する2つの傾斜面25mにそれぞれ当接する。一方、プッシャ27gが伝達部25cに衝突したときの衝撃は、ソレノイドシャフト27bの先端部に取り付けられた緩衝部材27fによって緩和される。
【0107】
また、図13(b)に示すように、カム25aの上方向への直進移動によって、回転アーム20と伝達部25cとの間に介装されたコイルばね25fがその力を受けて縮む。
引き続き、図13(b)に示す状態から、カム25aが上方向に移動すると、図13(c)に示すように、カム25aから上側カム用ピン25dへと伝達された上方向の力によって、上側カム用ピン25dが、上端カム面25jに形成された傾斜面25mに沿ってその当接位置から傾斜の麓方向に向かって摺動する。つまり、カム25aの上方向への直進移動力は、上端カム面25jの傾斜面25mによって、上側カム用ピン25dの回転駆動力、すなわち回転台回転軸24の回転駆動力へと変換される。これにより、回転台回転軸24は、時計回り方向に回転する。
【0108】
図14は、プッシャ27gで突き上げ後の回転台回転機構25の動作を示す図である。
回転台回転軸24は、図14(a)に示すように、傾斜面25mに沿って移動する上側カム用ピン25dが、隣の傾斜面25mの背面を形成する壁25nに衝突するまで回転し、壁25nに衝突して移動を停止するとそこで回転を停止する。つまり、カム25aの突き上げ動作時においては、上側カム用ピン25dが傾斜面25mに当接してから摺動して壁25nに衝突して停止するまでの移動距離に応じた回転角度だけ回転台回転軸24が時計回り方向に回転する。これにより、チップ回転台23およびチップ保持部26が時計回り方向に回転する。
【0109】
なお、本実施の形態において、回転台回転軸24の外周面に、上側カム用ピン25dの代わりにカムフォロアを用いたり、上側カム用ピン25dにベアリングを設けたりすることで、摺動時の抵抗を低くし、より回転しやすくすることも可能である。
一方、上側カム用ピン25dが壁25nに衝突している状態のとき(傾斜の付け根部分に位置するとき)に、回転台駆動力伝達機構27において、ソレノイド本体27aの駆動を停止すると、回転台回転機構25においては、プッシャ27gの突き上げ力が除去されるため、カム25aの上方向の移動によって縮んでいたコイルばね25fの復元力によって、カム25aが伝達部25cとともに、図14(b)に示すように、ガイド部25bに沿って、回転することなく下方向へと直進移動する。
【0110】
このとき、回転台回転軸24は、突き上げ時の回転によって、初期状態ではピン嵌合溝25qに嵌合していた4本の下側カム用ピン25eも時計回り方向に位置がずれているため、カム25aの下方向への直進移動によって、4本の下側カム用ピン25eが、下端カム面25oに形成された8つの傾斜面25pのうちの対応する4つにそれぞれ当接する。
また、ソレノイドシャフト27bは、プッシャ27gが、コイルばね25fの復元力で下方向に移動する伝達部25cに押されるため、この力と自重とによって下方向に移動する。
【0111】
引き続き、コイルばね25fの復元力によって、図14(b)に示す状態から、さらにカム25aが下方向に移動すると、図14(c)に示すように、カム25aから下側カム用ピン25eへと伝達された下方向の力によって、下側カム用ピン25eが、下端カム面25oを構成する傾斜面25pに沿ってその当接位置から傾斜の麓方向(ピン嵌合溝25qに向かって登る方向)に向かって移動する。つまり、カム25aの下方向への直進移動力は、傾斜面25pによって、下側カム用ピン25eの回転駆動力、すなわち回転台回転軸24の回転駆動力へと変換され、回転台回転軸24を時計回り方向に回転させる。これにより、チップ回転台23およびチップ保持部26が時計回りに回転し、チップ保持部26に保持されたマイクロチップの回転角度位置をさらに変更する。
【0112】
そして、下側カム用ピン25eは、ピン嵌合溝25qを形成する壁に衝突するまで回転し、壁に衝突するとそこで回転を停止する。カム25aは、壁に衝突した後も下方向に移動し、下側カム用ピン25eは、壁に沿って移動してピン嵌合溝25qに嵌合する。下側カム用ピン25eがピン嵌合溝25qに嵌合することによってカム25aの下方向の移動も停止する。これにより、回転台回転軸24は、下側カム用ピン25eが傾斜面25pに接触してからピン嵌合溝25qの壁に衝突するまでの移動距離に応じた回転角度だけ時計回り方向に回転することになる。
【0113】
なお、本実施の形態において、回転台回転軸24の外周面に、下側カム用ピン25eの代わりにカムフォロアを設けたり、下側カム用ピン25eにベアリングを設けたりすることで、摺動時の抵抗を低くし、より回転しやすくすることも可能である。
このようにして、遠心力付与装置2は、回転台駆動力伝達機構27の突き上げ動作によって、回転台回転軸24を時計回り方向に回転させることでチップ保持部26に保持されたマイクロチップ200の姿勢を変更することができる。
【0114】
また、下端カム面25oを構成する傾斜面25pの傾斜方向を回転台回転軸24を時計回りに回転させる方向(右下から左上に延びる傾斜)とし、さらに遠心力の付与時における回転アーム20の回転方向を時計回り方向としたので、回転アーム20を時計回り方向に高速回転させたときに、下側カム用ピン25eには、ピン嵌合溝25qを形成する壁に向かって押し付けられる方向に力が加わる。これにより、回転アーム20を回転させて遠心力を付与した時に、遠心力によって回転台回転軸24が回転してしまうのを防止することができるので、マイクロチップ200の姿勢がずれて不適切な方向に遠心力が加わるのを防止することができる。
【0115】
また、カム25aを、上端カム面25jの傾斜面25mの傾斜角度が、下端カム面25oの傾斜面25pの傾斜角度よりも急角度となるように両者を構成したので、上側カム用ピン25dを傾斜面25mに沿って摺動させるときに必要な力を、下側カム用ピン25eを傾斜面25pに沿って摺動させるときに必要な力よりも小さくできる。
ショックアブソーバ27cによる制動によって、突き上げ時にカム25aにかかる力よりも、コイルばね25fの復元力によってカム25aにかかる力の方が大きくなるため、傾斜面25mの傾斜角度を傾斜面25pよりも急角度にすることで上側カム用ピン25dの摺動に必要な力を小さくしている。
【0116】
一方、カム25aが下方向に移動時は、突き上げ時よりも大きな力が加わることから、傾斜面25mほどの傾斜角度がなくても、下側カム用ピン25eを傾斜面25pに沿って摺動させることができるので、傾斜面25pの傾斜角度を傾斜面25mの傾斜角度よりも小さくして、その分、背面を形成する壁の高さを壁25nよりも低く構成している。
つまり、壁の高さ(傾斜の頂点位置)を低くできることから、カム25aの高さをその分だけ低く構成することができる。さらに壁の高さを低くした分だけ、ソレノイドシャフト27bのストローク距離を短くすることができるので、傾斜面25mの背面を形成する壁25nの高さと、傾斜面25pの背面を形成する壁25rの高さとを同じにした場合と比較して、回転台駆動力伝達機構27を小型化することができる。
【0117】
また、カム25aを、その円筒形状の上端に上端カム面25jを、下端に下端カム面25oを設けた構成としたので、いずれか一方だけにカム面を設けた構成のものよりも、ソレノイドシャフト27bのストローク距離を短くすることができる。例えば、上端だけにカム面を設けた構成では、傾斜面の傾斜の長さが倍になると、ソレノイドシャフト27bのストローク距離が倍になり、ソレノイドシャフト27bを長くする等の装置の大型化につながる措置が必要となる。
【0118】
また、回転台回転機構25と回転台駆動力伝達機構27とを別体とし、回転台回転軸24に沿ったカム25aの上下動によって、回転台駆動力伝達機構27の突き上げ力を回転台回転軸24の回転力へと変換する構成としたので、回転台回転軸24を回転させるのに、回転台回転軸24を上下動させる必要がないため、チップ回転台23およびチップ保持部26を上下動させずにその場で回転させることができる。これにより、チップ回転台23、回転台回転軸24およびチップ保持部26を上下動させる構造にしなくてもすむ(固定支持できる)ので、例えば、アーム回転軸21の回転がアンバランスとなって、これらの構成部に上方向の力が加わっても、構成部が浮上することを防止することができる。
【0119】
次に、光学式測定装置3の構成を説明する。
図15は、光学式測定装置3の構成を示す図である。同図(a)は、光学式測定装置3の平面図であり、同図(b)、(c)は、光学式測定装置3の側面図である。
光学式測定装置3は、図15(a)〜(c)に示すように、センサヘッド30と、スライドレール32と、スライドレール33と、スライダ34と、スライダ35と、スライド補助部材36とを有して構成されている。
【0120】
スライドレール32、33は、直線形状のスライドレールであり、姿勢検出回転角度位置に対して時計回り方向に90°回転した回転角度位置(以下、測定回転角度位置という。)で回転アーム20が停止しているときに、チップ回転機構部の停止位置に対して、チップ回転機構部の右隣に、前後方向に所定距離を空けて両者が平行に基台1に固定支持されている。
【0121】
さらに、スライドレール32、33には、そのレール部に沿って摺動可能にスライダ34、35が装着されている。スライダ34、35は、スライドレール32、33の上方にセンサヘッド30が配されるように、高さ方向に伸びた取付部分を有している。この取付部分を介して、スライダ34、35が、センサヘッド30に固着されている。そして、スライダ34、35をレール部に沿って往復動させることで、センサヘッド30を、チップ回転機構部に対して接近および離間する方向に直進移動させる。なお、スライドレール32、33は、センサヘッド30をチップ回転機構部に最も接近させたときに、チップ保持部26に保持されたマイクロチップ200に対して測定処理が行える位置に設けられている。
【0122】
スライド補助部材36は、2本の角柱部材36a、36bの一端同士を結合(例えば、ネジ止め)したL字形状を有しており、L字を上下逆さまにした下方側角柱部材36bの他端部が、上方側角柱部材36aがスライドレール32、33の間を通ってこれらと平行にかつ上方側角柱部材36aが上部プレートよりも高い位置に配されるように基台1に固定支持されている。これにより、上方側角柱部材36aは、その他端部をセンサヘッド30を接近させる方向に真っ直ぐに向けた状態で基台1に固定支持される。
【0123】
センサヘッド30は、自己に固着されたスライダ34、35をスライドレール32、33に対してそれぞれレール部に沿って摺動可能に装着するとともに、自己に設けられた嵌合口に上方側角柱部材36aを、上方側角柱部材36aに沿って自己を摺動可能に嵌合させることで上部プレート上に配されている。
したがって、スライダ34、35がレール部に沿ってスライドすると、センサヘッド30もスライド部および上方側角柱部材36aに沿って、スライダ34、35と同じ移動方向にスライドする。
【0124】
なお、スライドレール32、33によるスライド移動機構およびスライド補助部材36によって、センサヘッド30の接近および離間移動時の上下動を抑えることができ、センサヘッド30を基台1の上面と平行に保ちながらチップ回転機構部に対して接近および離間する方向に確実に直進移動させることができる。これにより、チップ保持部260とセンサヘッド30との位置決めを精度よく行うことができ、測定回転角度位置においてチップ保持部26にセンサヘッド30が当接する位置(以下、測定処理位置という。)への正確な移動に対する再現性を確保することができる。
【0125】
光学式測定装置3は、さらに、心棒37と、戻り用ばね部38と、ソレノイド39と、ソレノイドシャフト40と、伝達部材41とを有して構成されている。
心棒37は、戻り用ばね部38のコイルばね38a、38bの心棒であり、先端部にばねのストッパを有し、上方側角柱部材36aの下方に、上方側角柱部材36aの長尺方向の直線と心棒37の長尺方向の直線とが平行となるように、後端部が下方側角柱部材36bに固定支持されている。
【0126】
戻り用ばね部38は、コイルばね38a、38bと、リング形状の連結部材38cとを有して構成されている。
2本のコイルばね38a、38bは、連結部材38cを介して連結され、この連結された2本のばねの内側に、下方側角柱部材36bに固定支持された心棒37が挿通されている。また、心棒37の先端にはストッパが設けられており、このストッパによってばねの抜けを防止する。さらに、連結部材38cは、心棒37に沿って摺動可能に設けられており、外力を受けると、コイルばね38a、38bを伸縮させながら心棒37に沿って移動する。
【0127】
ソレノイド39は、回転台駆動力伝達機構27のソレノイドと同様の構成となっており、内部のコイルを通電することで磁束を発生して可動鉄心を磁化し、この磁力によって可動鉄心を固定鉄心側に引き寄せることで、可動鉄心をセンサヘッド30のスライド方向と同じ方向に直進移動させる(直進運動力を発生させる)。
ソレノイドシャフト40は、ソレノイド39の可動鉄心に設けられた貫通孔に挿通して可動鉄心に対して軸方向に相対移動不能に取り付けられ、ソレノイド39のコイルの通電により発生した磁気吸引力によって可動鉄心とともに直進移動する。
【0128】
伝達部材41は、ソレノイドシャフト40の先端部、連結部材38c、センサヘッド30の結合部(不図示)とそれぞれ同じ直線上で結合され、ソレノイドシャフト40の直進移動力を、戻り用ばね部38およびセンサヘッド30に略同時に伝達する。
【0129】
図16は、センサヘッド30のスライド移動動作の一例を示す図である。
上記構成により、光学式測定装置3は、図16(a)に示すように、ソレノイド39が駆動して、ソレノイドシャフト40を直進移動させると、この直進移動力は、伝達部材41および連結部材38cを介してコイルばね38a、38bに伝達されるとともに、センサヘッド30の結合部を介してセンサヘッド30に伝達される。これにより、図16(b)に示すように、連結部材38cを介して伝達された直進移動力によって、コイルばね38aが縮むとともにコイルばね38bが伸びる。一方、センサヘッド30の結合部を介して伝達された直進移動力によって、スライダ34、35がセンサヘッド30とともに、スライドレール32、33のレール部に沿ってチップ回転機構部に接近する。
【0130】
また、図16(b)に示す状態で、ソレノイド39の駆動を停止して、センサヘッド30の結合部および連結部材38cから接近方向への直進移動力を除去すると、コイルばね38a、38bの復元力によってセンサヘッド30がチップ回転機構部から離間する方向に直進移動力が発生し、センサヘッド30をスライドレール32、33のレール部に沿って離間方向へと直進移動させる。これにより、センサヘッド30は、コイルばね38a、38bが伸縮した状態から元の長さに戻るまでの距離を離間方向に移動する。
【0131】
次に、センサヘッド30の構成を説明する。
図17は、センサヘッド30の構成を示す図である。同図(a)、(b)は、測定処理位置に移動時のセンサヘッド30の平面図であり、同図(c)は、受光ヘッド30fの平面図であり、同図(d)、(e)は、測定処理位置に移動時のセンサヘッド30の側面図である。
【0132】
センサヘッド30は、図17(a)、(b)に示すように、ナイロン等の樹脂部材(絶縁部材)から形成された、略ユ字形状の発光ヘッド30aおよび受光ヘッド30fを有し、両者を互いの形状が重なる位置で垂直方向に対向させて、発光ヘッド30aを受光ヘッド30fの上方に配設した構成となっている。
発光ヘッド30aには、その略ユ字形状の窪みを挟んで前後に位置する部位のうち、後方側の部位の左端に3つの発光素子が前後方向に一直線状に配列された構成のレーザ発光部30b(図中の丸で囲った部分(上側))が設けられている。
【0133】
発光ヘッド30aには、さらに、その略ユ字形状の窪みを挟んで前後に位置する部位のうち、前方側の部位の左寄りに、レーザ発光部30bの配列方向と直交する方向に3つの発光素子が一直線上に配列された構成のレーザ発光部30c(図中の丸で囲った部分(下側))が設けられている。
レーザ発光部30b、30cの各発光素子は、一端にレーザ光の入力口を、他端にレーザ光の照射口を有し、発光素子ごとに、発光ヘッド30aに垂直方向に形成された貫通穴の内部に配設されている。レーザ光の入力口は貫通穴の上側に向け、レーザ光の照射口は貫通穴の下側に向けて配設されている。
【0134】
レーザ発光部30b、30cは、入力口および照射口の形成された両端を除く各発光素子の周囲が絶縁部材で囲まれた構成となっている。
レーザ光の入力口側には、レーザ光の伝達路である光ファイバ(不図示)が接続されている。そして、レーザ発光部30b、30cは、基台1の内部に配設されたレーザ光源(例えば、半導体レーザ)からのレーザ光が、光ファイバを介してレーザ発光部30b、30cの入力口から入力されると、入力されたレーザ光を照射口から照射する。
【0135】
なお、レーザ発光部30b、30cは、照射するレーザ光の波長がそれぞれ異なるように構成されている。この場合、レーザ光の波長を調整可能に構成されていてもよい。
レーザ光の波長は、例えば、検体液が血液であれば、700〜1200[nm]の範囲(近赤外光の範囲)で設定する。これにより、例えば、遠心分離されかつ吸光度成分を有する試薬と混合された血漿成分に対して、波長が異なるレーザ光を照射した場合に、その透過光または反射光から、血中における、酸素化ヘモグロビン量、脱酸素化ヘモグロビン量、総ヘモグロビン量、酸素化ミオグロビン量、脱酸素化ミオグロビン量、総ミオグロビン量等を測定することができる。
【0136】
レーザ発光部30b、30cを構成する各発光素子は、図17(a)、(b)に示すように、その照射口の中心が、マイクロチップ200の測定部200aの3つの測定ポイントの中心と同じ間隔で配設されており、センサヘッド30が測定処理位置でかつマイクロチップ200の姿勢が正姿勢回転角度位置であるときは、測定部200aの測定ポイントと、レーザ発光部30bの発光素子とは垂直方向に対向する位置関係となるように配設されている。また、センサヘッド30が測定処理位置でかつマイクロチップ200の姿勢が右姿勢回転角度位置であるときは、測定部200aの測定ポイントと、レーザ発光部30cの発光素子とは垂直方向に対向する位置関係となるように配設されている。
【0137】
つまり、測定回転角度位置においてセンサヘッド30が測定処理位置にある場合に、マイクロチップ200の姿勢が正姿勢回転角度位置であるときは、図17(a)に示すように、レーザ発光部30bの3つの照射口が測定部200aの3つの測定ポイントとそれぞれ垂直方向に対向し、マイクロチップ200の姿勢が右姿勢回転角度位置であるときは、図17(b)に示すように、レーザ発光部30cの3つの照射口が測定部200aの3つの測定ポイントとそれぞれ垂直方向に対向する。
【0138】
一方、受光ヘッド30fには、図17(c)に示すように、その略ユ字形状の窪みを挟んで前後に位置する部位のうち、後方側の部位の左端に、3つの受光素子が前後方向に一直線状に配列された構成のレーザ受光部30g(図中の丸で囲った部分(上側))が設けられている。
受光ヘッド30fには、さらに、その略ユ字形状の窪みを挟んで前後に位置する部位のうち、前方側の部位の左寄りに、レーザ受光部30gの配列方向と直交する方向に3つの受光素子が一直線上に配列された構成のレーザ受光部30h(図中の丸で囲った部分(下側))が設けられている。
【0139】
具体的には、レーザ発光部30b、30cの各発光素子と垂直方向に対向する位置に各受光素子が設けられている。
レーザ受光部30g、30hの各受光素子は、フォトダイオード等の受光素子から構成されており、一端に透過光の受光部を、他端に受光した光の光量に応じた電気信号の出力部を有し、受光素子ごとに、受光ヘッド30fに垂直方向に形成された貫通穴の内部に配設されている。受光部は貫通穴の上側に向け、出力部は貫通穴の下側に向けて配設されている。
【0140】
レーザ受光部30g、30hは、受光部および出力部の形成された両端を除く各受光素子の周囲が絶縁部材で囲まれた構成となっている。
出力部には、信号線(不図示)が接続されている。そして、レーザ受光部30g、30hは、信号線を介して受光部からのセンサ信号を制御基板(後述)に伝達する。
センサヘッド30は、さらに、図17(a)、(b)に示すように、測定処理位置に移動したときに、水平方向に対向するチップ保持部26の外周部における右辺後方側の角部に角部の傾斜に合わせた傾斜面を接触してマイクロチップ200の位置とセンサヘッド30との位置を固定する支持部材30dと、同じく水平方向に対向するチップ保持部26の外周部における右辺前方側の角部に角部の傾斜に合わせた傾斜面を接触して支持部材30dとともにマイクロチップ200の位置とセンサヘッド30との位置を固定する支持部材30eとを有している。
【0141】
発光ヘッド30aおよび受光ヘッド30fは、図17(d)、(e)に示すように、両者を互いに同じ形状位置で隙間を空けて垂直方向に対向させ、後端側において支持部材30dが、前端側において支持部材30eが、発光ヘッド30aおよび受光ヘッド30fを挟持することで、隙間を保持した状態で両者を固定支持する構成となっている。
ここで、上記隙間は、測定処理時において、チップ保持部26に保持されたマイクロチップ200における測定部200aの上側に発光素子を、下側に受光素子を位置させるために設けたものであり、測定処理時には、チップ保持部26に保持されたマイクロチップ200をチップ保持部26ごと挟みこむようになっている。そのため、発光ヘッド30aと受光ヘッド30fとの間には、少なくとも、チップ保持部26に保持されたマイクロチップ200と、チップ保持部26と、チップ回転台23とが形成する垂直方向の厚み以上の隙間が形成されている。
【0142】
また、センサヘッド30には、回転アーム20の中心から径方向にみてチップ保持部26の左遠端の角部の位置に合わせて支持部材30dが、チップ保持部26の右遠端の角部の位置に合わせて支持部材30eが取り付けられており、センサヘッド30をチップ回転機構部に接近させたときに、支持部材30eの各傾斜面がチップ保持部26の各角部を押さえ付け、これによりチップ保持部26を正確な測定処理位置に固定支持する。
【0143】
また、発光ヘッド30aおよび受光ヘッド30fに形成された略ユ字形状の窪みの部分は、図17(a)、(b)に示すように、センサヘッド30を測定処理位置に移動時に、チップ保持部26に形成された被検出部26c、26dとセンサヘッド30との接触を回避させる役割を果たす。つまり、センサヘッド30をチップ回転機構部に接近させたときに、被検出部26c、26dがセンサヘッド30に接触することなく窪み内に進入し、測定処理位置に到達時において窪み内において停止する。
【0144】
上記構成により、測定回転角度位置に回転アーム20が停止しているときに、センサヘッド30を測定処理位置まで接近させると、発光ヘッド30aと受光ヘッド30fとの間に形成された隙間に、マイクロチップ200の装着されたチップ保持部26およびチップ回転台23の一部が挟み込まれるとともに、支持部材30d、30eの各傾斜面がチップ保持部26の角部と当接し、支持部材30d、30eが、ソレノイド39から伝達された力によってチップ保持部26の角部を押さえ付ける。これにより、チップ保持部26とセンサヘッド30とが測定処理位置に正確に固定支持される。
【0145】
センサヘッド30は、さらに、制御基板(後述)による制御により、マイクロチップ200の姿勢が正姿勢回転角度位置であるときに、レーザ発光部30bによって測定部200aにレーザ光を照射し、マイクロチップ200の姿勢が右姿勢回転角度位置であるときに、レーザ発光部30cによって測定部200aにレーザ光を照射するように構成されている。
【0146】
したがって、レーザ発光部30bの3つの照射口から照射されたレーザ光は、測定部200aの3つの測定ポイントを透過して、レーザ受光部30gの3つの受光部で受光され、レーザ発光部30cの3つの照射口から照射されたレーザ光は、測定部200aの3つの測定ポイントを透過して、レーザ受光部30hの3つの受光部で受光される。
このような構成であれば、遠心力付与装置2において、マイクロチップ200の姿勢を90°変更するだけで、測定回転角度位置に停止したマイクロチップ200に対して、波長が異なる2種類のレーザ光による測定処理を行うことができる。なお、マイクロチップ200のレーザ発光部30b、30cに対応する位置にそれぞれ測定部を設けることで、同時に2箇所の測定部に対して測定処理を行う構成とすることもできる。
【0147】
図18は、黒色の絶縁部材を用いて形成されたセンサヘッド30の一例を示す図である。
センサヘッド30は、さらに、図18(a)〜(c)に示すように、発光ヘッド30aと受光ヘッド30fの略ユ字形状のボディを形成する部材にレーザ光を吸収する機能を有する光吸収部材を用いている。
【0148】
光吸収部材は、発光ヘッド30aと受光ヘッド30fのボディを形成する部材に、近赤外領域(波長:780〜3000nm)に波長をもつ光を吸収する性質の機能性色素を添加することで生成することができる。
例えば、樹脂材料中に、以下の顔料、あるいは色素を添加することにより、レーザ光を吸収することが可能である。例えば、セラミックブラック、酸化鉄(無機顔料)、カーボンブラック、ボーンブラック(有機顔料)等の黒色顔料、クロムエロー、セラミックエロー、ジンククロメートエロー(無機顔料)、ニッケルアゾグリーンエロー(有機顔料)等の黄色顔料、ハイドロクロムオキサイドグリーン、クロムグリーン(無機顔料)、クロミウムオキサイドダルグリーン、フタロシアニングリーン(有機顔料)等の緑色顔料、色素としては黒色顔料、シアニン系色素、フタロシアニン系、チオールニッケル錯体系、インドフェノール金属錯体系、ナフトキノン系、アゾ系、トリアゾールメタン系、分子間型CT色素等の色素を使用することができる。
【0149】
具体的に、発光ヘッド30aと受光ヘッド30fのボディを形成するナイロン等の絶縁体の樹脂材料に、セラミックブラック等の黒色顔料を添加して、光吸収機能を付加している。この光吸収機能によって、発光ヘッド30aの各発光素子から照射されたレーザ光の散乱光は、発光ヘッド30aと受光ヘッド30fのボディ表面で殆ど反射されずに吸収されるため、反射光による誤動作の発生等を低減することができる。
【0150】
なお、発光ヘッド30aと受光ヘッド30fだけではなく、支持部材30d、30eについても、これらの材料に光吸収機能を付加することが可能である。これにより、支持部材30d、30eからの反射光も低減することができるので、レーザ光の散乱光による誤作動の発生等をより低減することができる。
また、先述したように、発光ヘッド30aと受光ヘッド30fとは、絶縁体で形成されているので、発光ヘッド30aに設けられた発光素子同士の電気的な干渉を低減することができる。これにより、電気的干渉によるレーザ光への不具合(波長の変化等)の発生を低減することができる。
【0151】
さらに、受光ヘッド30fに設けられた複数の受光素子を形成する金属部材にノイズが乗るのを防止しまたはノイズが乗る量を低減することもできる。これにより、ノイズによる測定結果の誤差の発生を防止しまたは誤差量を低減することができる。
【0152】
次に、温度調整装置4の構成を説明する。
図19は、温度調整装置4の内部構成を示す図である。
温度調整装置4は、図19に示すように、筐体54と、筐体54の側部に設けられた調温部50と、筐体54の内部に設けられ、筐体54内部の温度を測定する温度センサ51と、ファン52と、電気エネルギを熱に変換する発熱体53と、受光ヘッド30fの近傍に配設された温度センサ55とを有して構成されている。
調温部50は、温度センサ51、55から入力された電圧値に基づいて筐体54の内部の温度および受光ヘッド30fの近傍の温度をそれぞれ測定する温度測定部と、温度測定部の測定温度に応じて発熱体53の発熱量を制御する発熱量制御部とを有して構成されている。
【0153】
通常は、受光素子から安定したセンサ信号を得るために、温度センサ55からの入力に基づいて受光ヘッド30fの近傍の温度を一定に保つように発熱量を制御する。一方、温度センサ51からの入力によって、筐体54の内部の温度が著しく上昇したと判定されたとき等に、発熱体53への電気エネルギの供給を停止する等の特別な制御を行う。
温度センサ51、55は、熱電対から構成されており、それぞれ配設位置近傍の温度差に応じた電圧信号を調温部50に出力する。
【0154】
ファン52は、モータによって駆動する送風用のファンであり、発熱体53の近傍に、発熱体53に向かって風を吹き付ける方向に向けて配設されている。なお、調温部50において、発熱体53の発熱量だけでなく、ファン52の回転数等も制御して、温度制御を行う構成とすることも可能である。
発熱体53は、抵抗発熱体等の電気エネルギを熱に変換する部材から構成されており、調温部50から供給される電気エネルギを熱に変換し、この熱によって筐体54の内部の空気を暖める。
【0155】
図20は、検体液分析装置100の内部における空気の流れの一例を示す図である。
温度調整装置4によって、調温部50が電気エネルギを発熱体53に供給すると、発熱体53において電気エネルギが熱に変換され、この熱によって筐体54の内部の空気が暖められる。一方、ファン52は常に一定の回転速度で回転しており、発熱体53の発熱によって暖められた空気は、ファン52の発生する風によって、図20に示すように、基台1の内部を通って上部プレートへと向かって上方に移動する。
【0156】
図21は、基台1の上面部における空気の流れの一例を示す図である。
そして、図21に示すように、上部プレートの下面に到達した空気は、上部プレートに設けられた通風口10を通って、基台1の上面部と遮光カバー5とから形成される空間内へと流入する。また、空間内に流入した空気は、遠心力付与装置2および光学式測定装置3の周辺の空気を暖めるとともに、通風口11を通って基台1内部へと移動し、基台1内部を通って筐体54の内部へと戻ることで検体液分析装置100の内部を循環する。
【0157】
このようにして、温度調整装置4で発生した暖かい空気を適宜循環させることで、基台1の上面部と遮光カバー5とから形成される空間内の温度を暖めるとともに、空間内の温度を一定に保つことができるので、マイクロチップ200内の検体液溜めに注入された検体液や試薬の温度を一定に保つことができる。さらに、受光ヘッド30fにおける、受光素子の温度変化に対する特性変化が原因で発生する誤差をなくすまたは低減することができる。
【0158】
また、通風口10に対して開閉シャッタ15が設けられており、開閉シャッタ15の開閉量を調整することで通風口10の開口部の大きさを調整し、基台1の上面部と遮光カバー5とから形成される空間内への暖められた空気の流入量を調整することができる。
【0159】
次に、制御基板300の構成を説明する。
図22は、制御基板300の構成を示すブロック図である。
制御基板300は、図22に示すように、制御プログラムに基づいて演算およびシステム全体を制御するCPU302と、所定領域にあらかじめCPU302の制御プログラム等を格納しているROM304と、ROM304等から読み出したデータやCPU302の演算過程で必要な演算結果を格納するためのRAM306と、外部装置に対してデータの入出力を媒介する駆動指令出力I/F308、センサ入力I/F310および通信I/F312とで構成されており、これらは、データを転送するための信号線であるバスで相互にかつデータ授受可能に接続されている。
【0160】
駆動指令出力I/F308には、駆動回路22bと、回転台駆動力伝達機構27のソレノイド28と、ソレノイド39とが接続されている。したがって、CPU302は、駆動指令出力I/F308を介して駆動回路22bおよびソレノイド28、39に制御信号を出力する。
センサ入力I/F310には、姿勢センサ13、14と、レーザ発光部30bおよびレーザ受光部30gからなる測定センサ31aと、レーザ発光部30cおよびレーザ受光部30hからなる測定センサ31bとが接続されている。したがって、CPU302は、センサ入力I/F310を介して姿勢センサ13、14および測定センサ31a、31bからセンサ信号を入力する。
【0161】
通信I/F312には、外部コンピュータ(不図示)が接続されている。したがって、CPU302は、通信I/F312を介して外部コンピュータと通信を行う。
CPU302は、ROM304等の所定領域に格納されている制御プログラムを起動させ、その制御プログラムに従って、図23ないし図25のフローチャートに示すチップセット処理、モータ原点確定処理および検体液分析処理を実行する。
【0162】
初めに、チップセット処理を説明する。
図23は、チップセット処理を示すフローチャートである。
チップセット処理は、マイクロチップ200をチップ保持部26に装着した場合に測定可能であるか否かを確認する処理であって、CPU302において実行されると、図23に示すように、まず、ステップS100に移行する。
【0163】
ステップS100では、遮光カバー5に設けられた開閉センサ(不図示)からのセンサ信号に基づいて遮光カバー5が開放されているか否かを判定し、遮光カバー5が開放されていないと判定したとき(No)は、ステップS102に移行する。
ステップS102では、各種センサ13、14、31a、31b等が安全であることを示す安全サインを出力しているか否かを判定し、安全サインを出力していると判定したとき(Yes)は、ステップS104に移行する。
【0164】
ステップS104では、駆動回路22bからALC信号を入力し、ALC信号を入力してから所定時間(例えば、10[ms]以上)待機し、ステップS106に移行して、入力したALC信号に基づいてALCが正常であるか否かを判定し、ALCが正常であると判定したとき(Yes)は、ステップS108に移行する。
ステップS108では、マイクロチップ200の装着が完了し測定が可能である旨のメッセージを液晶ディスプレイ等の表示装置(不図示)に表示し、一連の処理を終了して元の処理に復帰させる。
【0165】
一方、ステップS106で、ACLが正常でないと判定したとき(No)は、ステップS104に移行する。
一方、ステップS102で、各種センサ13、14、31a、31b等が安全サインを出力しないと判定したとき(No)は、ステップS110に移行して、ソレノイド28、39の位置を確認すべき旨のエラーメッセージを表示装置に表示し、ステップS102に移行する。
【0166】
一方、ステップS100で、遮光カバー5が開放されていると判定したとき(Yes)は、ステップS112に移行して、マイクロチップ200を装着し遮光カバー5を閉じるべき旨のエラーメッセージを表示装置に表示し、ステップS100に移行する。
【0167】
次に、モータ原点確定処理を説明する。
図24は、モータ原点確定処理を示すフローチャートである。
モータ原点確定処理は、ステッピングモータ22aおよびソレノイド39を駆動し、原点が確定できるか否かを確認する処理であって、CPU302において実行されると、図24に示すように、まず、ステップS200に移行する。
ステップS200では、遮光カバー5に設けられた開閉センサからのセンサ信号に基づいて遮光カバー5が開放されているか否かを判定し、遮光カバー5が開放されていないと判定したとき(No)は、ステップS202に移行する。
【0168】
ステップS202では、各種センサ13、14、31a、31b等が安全であることを示す安全サインを出力しているか否かを判定し、安全サインを出力していると判定したとき(Yes)は、ステップS204に移行する。
ステップS204では、駆動回路22bからALC信号を入力し、ALC信号を入力してから所定時間(例えば、10[ms]以上)待機し、ステップS206に移行して、入力したALC信号に基づいてALCが正常であるか否かを判定し、ALCが正常であると判定したとき(Yes)は、ステップS208に移行する。
【0169】
ステップS208では、ステッピングモータ22aを低速で回転させることを示す制御信号を駆動回路22bに出力し、ステップS210に移行して、姿勢センサ13または姿勢センサ14からONのセンサ信号を入力したか否かを判定することにより姿勢センサ13、14で被検出部26c、26dを検出したか否かを判定し、姿勢センサ13、14で被検出部26c、26dを検出したと判定したとき(Yes)は、姿勢検出回転角度位置に回転アーム20が位置しているので、ステップS212に移行して、ステッピングモータ22aを停止させることを示す制御信号を駆動回路22bに出力し、ステップS214に移行する。
【0170】
ステップS214では、姿勢検出回転角度位置に停止している回転アーム20を測定回転角度位置まで回転させるため、ステッピングモータ22aを90[°]回転させることを示す制御信号を駆動回路22bに出力し、ステップS216に移行して、ステッピングモータ22aのサーボをOFFにすることを示す制御信号を駆動回路22bに出力し、ステップS218に移行する。
【0171】
ステップS218では、チップ保持部26に保持されたマイクロチップ200にセンサヘッド30を当接させて測定可能な状態に移行できるか否かを確認するため、センサヘッド30を測定処理位置まで接近させることを示す制御信号をソレノイド39に出力し、ステップS220に移行する。
ステップS220では、ステッピングモータ22aのサーボをONにすることを示す制御信号を駆動回路22bに出力し、ステップS222に移行して、原点が確定できた旨のメッセージを表示装置に表示し、一連の処理を終了して元の処理に復帰させる。
【0172】
一方、ステップS210で、姿勢センサ13、14で被検出部26c、26dを検出できないと判定したとき(No)は、姿勢検出回転角度位置に回転アーム20が位置していないので、ステップS208に移行する。
一方、ステップS206で、ACLが正常でないと判定したとき(No)は、ステップS204に移行する。
【0173】
一方、ステップS202で、各種センサ13、14、31a、31b等が安全サインを出力しないと判定したとき(No)は、ステップS224に移行して、ソレノイド28、39の位置を確認すべき旨のエラーメッセージを表示装置に表示し、ステップS202に移行する。
一方、ステップS200で、遮光カバー5が開放されていると判定したとき(Yes)は、ステップS226に移行して、遮光カバー5を閉じるべき旨のエラーメッセージを表示装置に表示し、ステップS200に移行する。
【0174】
次に、検体液分析処理を説明する。
図25は、検体液分析処理を示すフローチャートである。
検体液分析処理は、チップ保持部26に保持されたマイクロチップ200に遠心力を付与することにより、検体液の成分を分離し、分離後の成分と試薬とを混合し、試薬混合後の成分を分析する処理であって、CPU302において実行されると、図25に示すように、まず、ステップS300に移行する。
【0175】
ステップS300では、ステッピングモータ22aを第1駆動パターンで回転させることを示す制御信号を駆動回路22bに出力する。駆動パターンとは、駆動速度プロフィールに基づいて駆動されるステッピングモータ22aの動作パターンをいう。駆動速度プロフィールは、ステッピングモータ22aの加速、減速、定常速度または停止のパターンを示すものであり、例えば、ステッピングモータ22aのトップスピードをどれぐらいに設定するか、加速や減速の度合いをどれぐらいに設定するかといった内容が規定されている。
【0176】
次いで、ステップS302に移行して、ステッピングモータ22aを第2駆動パターンで回転させることを示す制御信号を駆動回路22bに出力し、ステップS304に移行して、ステッピングモータ22aが停止したか否かを判定し、停止したと判定したとき(Yes)は、ステップS306に移行するが、そうでないと判定したとき(No)は、ステッピングモータ22aが停止するまでステップS304で待機する。
【0177】
次に、ステップS306〜S316の処理を説明する。ステップS306〜S316の処理は、姿勢検出回転角度位置まで回転アーム20を回転させるための仮原点移動処理である。
ステップS306では、ステッピングモータ22aを低速で回転させることを示す制御信号を駆動回路22bに出力し、ステップS308に移行して、姿勢センサ13または姿勢センサ14からONのセンサ信号を入力したか否かを判定することにより姿勢センサ13、14で被検出部26c、26dを検出したか否かを判定し、姿勢センサ13、14で被検出部26c、26dを検出したと判定したとき(Yes)は、姿勢検出回転角度位置に回転アーム20が位置しているので、ステップS310に移行して、ステッピングモータ22aを停止させることを示す制御信号を駆動回路22bに出力し、ステップS318に移行する。
【0178】
一方、ステップS308で、姿勢センサ13、14で被検出部26c、26dを検出できないと判定したとき(No)は、姿勢検出回転角度位置に回転アーム20が位置していないので、ステップS312に移行して、ステップS306で制御信号を出力してから回転アーム20が1回転するのに十分な所定時間が経過したか否かを判定し、所定時間が経過したと判定したとき(Yes)は、ステップS314に移行する。
【0179】
ステップS314では、チップ保持部26の破損やマイクロチップ200の脱落といった障害が発生した旨のエラーメッセージを表示装置に表示し、ステップS316に移行して、制御を中断し、一連の処理を終了して元の処理に復帰させる。
一方、ステップS312で、所定時間が経過しないと判定したとき(No)は、ステップS306に移行する。
【0180】
次に、ステップS318〜S324の処理を説明する。ステップS318〜S324の処理は、姿勢検出回転角度位置においてマイクロチップ200の姿勢を変更する姿勢変更処理である。
ステップS318では、プッシャ27gを上昇させることを示す制御信号をソレノイド28に出力し、ステップS320に移行して、プッシャ27gを下降させることを示す制御信号をソレノイド28に出力する。ステップS318、S320の1回の処理により、チップ回転台23およびチップ保持部26は、45[°]回転する。これに伴って、マイクロチップ200もチップ保持部26と一体に[°]45回転する。
【0181】
次いで、ステップS322に移行して、ステップS318、S320の処理を2回実行したか否かを判定し、2回実行したと判定したとき(Yes)は、ステップS324に移行する。
ステップS324では、姿勢センサ13または姿勢センサ14からのセンサ信号に基づいて、マイクロチップ200の姿勢が適切に90[°]回転したか否かを判定する。チップ回転台23およびチップ保持部26は、回転台駆動力伝達機構27の構造から時計回りに回転するため、回転前の姿勢センサ13、14からのセンサ信号と、回転後の姿勢センサ13、14からのセンサ信号とを対比し、その対比結果に基づいて、回転前後で位相が90[°]進んでいるか否かを判定する。例えば、マイクロチップ200の回転前の姿勢が正姿勢回転角度位置である場合は、回転後は、右姿勢回転角度位置となっているはずなので、回転後の姿勢センサ13、14からのセンサ信号に基づいて右姿勢回転角度位置でないと判定したときは、マイクロチップ200の姿勢が適切に90[°]回転していないと判定される。この場合は、回転中に、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じたと判定することができる。これに対し、右姿勢回転角度位置であると判定したときは、マイクロチップ200の姿勢が適切に90[°]回転したと判定される。
【0182】
ステップS324の結果、マイクロチップ200の姿勢が適切に90[°]回転したと判定したとき(Yes)は、ステップS326に移行するが、そうでないと判定したとき(No)は、ステップS314に移行する。
一方、ステップS322で、ステップS318、S320の処理を2回実行していないと判定したとき(No)は、ステップS318に移行する。
【0183】
一方、ステップS326では、ステッピングモータ22aを第3駆動パターンで回転させることを示す制御信号を駆動回路22bに出力し、ステップS328に移行して、ステッピングモータ22aを第4駆動パターンで回転させることを示す制御信号を駆動回路22bに出力し、ステップS330に移行する。
ステップS330では、ステッピングモータ22aを第5駆動パターンで回転させることを示す制御信号を駆動回路22bに出力し、ステップS332に移行して、ステッピングモータ22aを第6駆動パターンで回転させることを示す制御信号を駆動回路22bに出力し、ステップS334に移行する。
【0184】
ステップS334では、ステップS330、S332の処理を27回実行したか否かを判定し、27回実行したと判定したとき(Yes)は、ステップS336に移行する。
ステップS336では、ステッピングモータ22aを第7駆動パターンで回転させることを示す制御信号を駆動回路22bに出力し、ステップS338に移行して、ステップS306〜S316と同様の仮原点移動処理を実行し、ステップS340に移行する。
【0185】
ステップS340では、姿勢検出回転角度位置に停止している回転アーム20を測定回転角度位置まで回転させるため、ステッピングモータ22aを90[°]回転させることを示す制御信号を駆動回路22bに出力し、ステップS342に移行する。
ステップS342では、マイクロチップ200の測定部200aに対して1回目の測定処理を行う第1測定処理を実行する。第1測定処理では、センサヘッド30を測定処理位置まで接近させることを示す制御信号をソレノイド39に出力し、測定実行を示す制御信号を測定センサ31aに出力し、測定センサ31aからセンサ信号を入力し、センサヘッド30を測定処理位置から離間させることを示す制御信号をソレノイド39に出力する。
【0186】
次いで、ステップS344に移行して、入力したセンサ信号を示す第1測定結果データを外部コンピュータに出力し、ステップS346に移行して、ステップS306〜S316と同様の仮原点移動処理を実行し、ステップS348に移行して、ステップS318〜S324と同様の姿勢変更処理を実行し、ステップS350に移行する。
ステップS350では、姿勢検出回転角度位置に停止している回転アーム20を測定回転角度位置まで回転させるため、ステッピングモータ22aを90[°]回転させることを示す制御信号を駆動回路22bに出力し、ステップS352に移行する。
【0187】
ステップS352では、マイクロチップ200の測定部200aに対して2回目の測定処理を行う第2測定処理を実行する。第2測定処理では、センサヘッド30を測定処理位置まで接近させることを示す制御信号をソレノイド39に出力し、測定実行を示す制御信号を測定センサ31bに出力し、測定センサ31bからセンサ信号を入力し、センサヘッド30を測定処理位置から離間させることを示す制御信号をソレノイド39に出力する。
【0188】
次いで、ステップS354に移行して、入力したセンサ信号を示す第2測定結果データを外部コンピュータに出力し、ステップS356に移行して、測定が完了した旨のメッセージを表示装置に表示し、一連の処理を終了して元の処理に復帰させる。
一方、ステップS334で、ステップS330、S332の処理を27回実行していないと判定したとき(No)は、ステップS330に移行する。
【0189】
次に、本実施の形態の動作を説明する。
以下、測定対象の検体液を血液とし、血液分析用のマイクロチップ200を用いて、血液の吸光度測定を行う場合の検体液分析装置100の実際の動作を説明する。
血液分析用のマイクロチップ200には、少なくとも、測定対象者から採血した血液を溜める血液溜め、試薬を溜める3つの試薬溜め、第1遠心方向(マイクロチップ200の姿勢が左姿勢回転角度位置であるときの回転アーム20の長手方向外向きの方向)への遠心力の付与に応じて血液溜めの血液を血球成分と血漿成分とに遠心分離する構造を有したマイクロキャピラリ流路(例えば、U字状のマイクロキャピラリ流路)から形成される遠心分離部、第2遠心方向(マイクロチップ200の姿勢が正姿勢回転角度位置であるときの回転アーム20の長手方向外向きの方向)への遠心力の付与に応じて血漿成分を秤量する秤量部、秤量された血漿成分と試薬溜めの試薬とを混合する混合部、および試薬の混合された血漿成分に対して吸光度測定を行う3つの測定ポイントを有する測定部200aが形成されている。また、秤量部は、血漿成分を秤量して3つの測定対象成分を得られるように構成されており、混合部は、この3つの測定対象成分と試薬とを混合する。なお、混合する試薬は、通常、測定対象や測定内容に応じて異なり、3つの測定対象成分に対して同じ種類の試薬を混合する場合や、異なる試薬を混合する場合がある。ここでは、吸光度測定を行うので、測定対象に吸光機能を付加する試薬を3つの試薬溜めに溜めておく。
【0190】
また、検体液分析装置100は、制御基板300が制御プログラムを実行することで、各制御対象への制御信号を生成し、生成した制御信号によって各制御対象を制御して、(1)血液(全血)の遠心分離、(2)遠心分離後の分離成分(血漿)の秤量、分離成分と試薬との混合および試薬の混合された分離成分の測定部への移動、(3)測定部へと移動した分離成分に対する第1波長のレーザ光の照射および各透過光の受光、(4)第1波長による測定結果である第1測定結果データの外部コンピュータへの出力、(5)測定部へと移動した分離成分に対する第2波長のレーザ光の照射および各透過光の受光、(6)第2波長による測定結果である第2測定結果データの外部コンピュータへの出力、の6つの工程を自動的に行うようになっている。
【0191】
検体液分析装置100の電源を投入すると、まず、温度調整装置4が駆動し、調温部50からの電気エネルギの供給によって、発熱体53が発熱して周囲の空気を暖めるとともに、ファン52が駆動して、暖められた空気を基台1の内部へと送り込む。基台1の内部へと送り込まれた空気は、通風口10を通って、基台1の上面部と遮光カバー5とから形成される空間内へと流れ込み、空間内の温度を上昇させる。
【0192】
また、調温部50は、センサヘッド30の近傍に配設された温度センサ55からの入力電圧によって、空間内における受光ヘッド30fの近傍の温度を測定し、測定温度が設定温度に近づくようにかつ一定に保たれるように、発熱体53への供給電力量を調整する。
一方、マイクロチップ200に形成された血液溜めには、測定対象者の血液(例えば、20[μl])が注入される。血液溜めに血液の注入されたマイクロチップ200は、回転アーム20の一端にあるチップ保持部26に装着される。このとき、マイクロチップ200の姿勢は、左姿勢回転角度位置とする。なお、回転アーム20の他端にあるチップ保持部26には、未使用のマイクロチップ200(またはダミーチップ)を装着し、両端の重量バランスを均衡させる。
【0193】
図26は、遠心力付与時の動作を示す図である。
マイクロチップ200がチップ保持部26に装着され、開始ボタン(不図示)が押下されると、まず、ステップS300〜S304を経て、第1遠心分離制御を含む工程(1)が行われる。
工程(1)が開始されると、制御基板300において、駆動回路22bに供給する制御信号が生成され、生成された制御信号が駆動回路22bに供給される。駆動回路22bは、供給された制御信号に基づいてスイッチング回路のON/OFFを切り換え、ステッピングモータ22aに相電流を供給する。この相電流の供給によって、ステッピングモータ22aが回転駆動し、この回転駆動力は、アーム回転軸21へと伝達され、アーム回転軸21を回転させる。アーム回転軸21が回転すると、アーム回転軸21が結合された回転アーム20が、図26(a)に示すように、時計回りに回転する。ここでは、注入された血液(全血)を血球成分と血漿成分とに分離するのに十分な回転速度(例えば、3000[回/1分])および回転時間(例えば、15分間)で回転アーム20を高速回転させる。この回転によって第1遠心方向に遠心力が付与される。そして、回転アーム20を必要な時間分回転させると、工程(1)が完了し、マイクロチップ200の血液溜めに注入された全血は、血球成分と血漿成分とに遠心分離される。
【0194】
工程(1)が完了すると、引き続き、ステップS306〜S336を経て、第2遠心分離制御を含む工程(2)が行われる。
工程(2)が開始されると、制御基板300からの制御信号に応じて、まず、アーム回転機構22が駆動し、測定対象のマイクロチップ200が保持されたチップ保持部26が、図26(b)に示すように、姿勢検出回転角度位置で停止するように、姿勢検出回転角度位置まで回転アーム20を回転させ、その位置に停止させる。
【0195】
回転アーム20の回転角度位置の検出は、姿勢センサ13によって被検出部26dを検出することで行う。このとき、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じた場合は、姿勢センサ13、14の検出結果によっては姿勢検出回転角度位置を判定することができないので、ステップS316を経て、制御が中断される。
工程(2)においては、第2遠心方向に遠心力を付与する必要があるため、マイクロチップ200の姿勢を変更する。
【0196】
制御基板300は、まず、マイクロチップ200の姿勢を変更するために、回転台駆動力伝達機構27に制御信号を出力し、ソレノイド本体27aを駆動させて、ソレノイドシャフト27bをショックアブソーバ27cで衝撃を緩和させながら上方向に直進移動させ、プッシャ27gと垂直方向に対向する伝達部25cをプッシャ27gによって突き上げる。これにより、伝達部25cと一体形成されたカム25aが回転台回転軸24に沿って突き上げられる。
【0197】
カム25aが突き上げられると、上端カム面25jと、上側カム用ピン25dとによって、突き上げ力が回転台回転軸24の回転力へと変換され、回転台回転軸24が時計回りに回転する。その後、ソレノイド本体27aの駆動を停止すると、回転台回転機構25では、コイルばね25fの復元力によって、カム25aが回転台回転軸24に沿って下方向に直進移動し、下端カム面25oと、下側カム用ピン25eとによって、カム25aの下方向の移動力が回転台回転軸24の回転力へと変換され、回転台回転軸24がさらに時計回りに回転する。
【0198】
図27は、マイクロチップ200の姿勢変更時の動作を示す図である。
ここでは、カム25aの1回の上下方向の移動によって、回転台回転軸24を、時計回りに45[°]回転させるように、上端カム面25jの傾斜面25mおよび下端カム面25oの傾斜面25pが適宜の傾斜角度および数で構成され、上側カム用ピン25dおよび下側カム用ピン25eが適宜の数で構成されている。
【0199】
したがって、図27(a)に示すように、1回の突き上げ動作(カム25aの上下動)による回転台回転軸24の回転によって、チップ回転台23およびチップ保持部26を時計回りに45[°]回転する。すなわち、マイクロチップ200の姿勢を時計回りに45[°]回転させた姿勢へと変更する。
マイクロチップ200を第2遠心方向に向けるには、マイクロチップ200の姿勢を正姿勢回転角度位置にする必要があるので、突き上げ動作を同じ手順でもう1回行って、マイクロチップ200の姿勢をさらに時計回りに45[°]回転させた姿勢へと変更する。
【0200】
これにより、マイクロチップ200は、図27(b)に示すように、第1遠心方向に対応する図26(b)に示す姿勢に対して、時計回りに90[°]回転した姿勢となる。
マイクロチップ200の姿勢の検出は、姿勢センサ13、14によって被検出部26c、26dを検出することで行う。このとき、マイクロチップ200の姿勢が正姿勢回転角度位置であると、姿勢センサ13により、照射された光が被検出部26cで反射し、その反射光を受光することができるとともに、姿勢センサ14により、照射された光が被検出部26dで反射し、その反射光を受光することができるので、マイクロチップ200の姿勢が正姿勢回転角度位置であることを検出することができる。また、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じた場合は、姿勢センサ13、14の検出結果によっては、マイクロチップ200の姿勢が適切に90[°]回転したことを判定することができないので、ステップS316を経て、制御が中断される。
【0201】
マイクロチップ200の姿勢が正姿勢回転角度位置になると、制御基板300は、アーム回転機構22に制御信号を出力して、アーム回転機構22を駆動し、遠心分離後の血漿成分を秤量するのに十分な回転速度および回転時間で回転アーム20を高速回転させる。この回転によって第2遠心方向に遠心力が付与される。そして、回転アーム20を必要な時間分回転させると、工程(2)が完了し、血漿成分が秤量され3つの測定対象の血漿成分が3つの秤量部に溜まり、秤量された3箇所の血漿成分と3箇所の試薬溜めの試薬とがそれぞれ混合され、混合後の各血漿成分が測定部200aの3つの測定ポイントにおけるそれぞれ対応したポイントへと移動する。
【0202】
図28は、光学式測定装置3の測定処理時の動作を示す図である。
工程(2)が完了すると、引き続き、ステップS338〜S342を経て、第1測定処理を含む工程(3)が行われる。
工程(3)が開始されると、制御基板300は、測定部200aをセンサヘッド30と対向させるため、アーム回転機構22を駆動して、図28(a)に示すように、姿勢検出回転角度位置から時計回りに90[°]回転させた測定回転角度位置まで回転アーム20を回転させ、その位置に停止させる。
【0203】
回転アーム20が測定回転角度位置に停止すると、制御基板300は、ソレノイド39に対してソレノイド39を駆動する制御信号を出力する。これにより、ソレノイド39が駆動して、ソレノイドシャフト40が直進移動し、自己に結合された伝達部材41を直進移動させる。伝達部材41は、ソレノイドシャフト40の直進運動力を、連結部材38cを介して、戻り用ばね部38およびセンサヘッド30に略同時に伝達する。これにより、センサヘッド30の結合部を介して伝達された直進運動力によって、スライダ34、35の固着されたセンサヘッド30が、図28(b)に示すように、上方側角柱部材36a、スライドレール32、33のレール部に沿ってマイクロチップ200の保持されたチップ保持部26のある方向(左方向)に直進移動する。センサヘッド30は、支持部材30d、30eがチップ保持部26の角部に当接するまで直進移動する。そして、支持部材30d、30eによってチップ保持部26の角部を押さえ付けることで、測定処理位置においてチップ保持部26とセンサヘッド30との位置決めが行われかつその位置が固定支持される。
【0204】
センサヘッド30が測定処理位置に移動すると、制御基板300は、測定センサ31aに対して制御信号を出力して、レーザ発光部30bを駆動し、第1波長のレーザ光を3つの発光素子から、これらと垂直方向に対向する測定部200aの3つの測定ポイントに向けて照射する。照射された第1波長のレーザ光は、3つの測定ポイントにそれぞれ存在する試薬混合後の血漿成分を透過し、透過光がレーザ受光部30gの3つの受光素子で受光される。そして、この受光された透過光の光量に応じたセンサ信号が信号線を介して制御基板300へと出力される。さらに、制御基板300の制御によってソレノイド39がオフにされ、工程(3)が完了する。ソレノイド39がオフにされると、コイルばね38a、38bの復元力によってセンサヘッド30がチップ回転機構部から離間し、初期位置へと復帰する。
【0205】
工程(3)が完了すると、引き続き、ステップS344を経て、工程(4)が行われる。
工程(4)が開始されると、制御基板300は、受光素子からのセンサ信号を示す第1測定結果データを外部コンピュータへと出力して、工程(4)が完了する。
工程(4)が完了すると、引き続き、ステップS346〜S352を経て、第2測定処理を含む工程(5)が行われる。
【0206】
工程(5)が開始されると、制御基板300は、アーム回転機構22を駆動して、図27(b)に示すように、測定回転角度位置から反時計回りに90[°]回転させた姿勢検出回転角度位置まで回転アーム20を回転させ、その位置に停止させる。
回転アーム20の回転角度位置の検出は、姿勢センサ13、14によって被検出部26c、26dを検出することで行う。このとき、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じた場合は、姿勢センサ13、14の検出結果によっては姿勢検出回転角度位置を判定することができないので、ステップS316を経て、制御が中断される。
【0207】
さらに、制御基板300は、回転台駆動力伝達機構27を駆動して、突き上げ動作を2回行い、マイクロチップ200の姿勢を、現在の正姿勢回転角度位置から時計回りに90[°]回転させた右姿勢回転角度位置に変更する。
マイクロチップ200の姿勢の検出は、姿勢センサ13、14によって被検出部26c、26dを検出することで行う。このとき、マイクロチップ200の姿勢が右姿勢回転角度位置であると、姿勢センサ14により、照射された光が被検出部26cで反射し、その反射光を受光することができるが、姿勢センサ13では反射光を受光できないので、マイクロチップ200の姿勢が右姿勢回転角度位置であることを検出することができる。また、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じた場合は、姿勢センサ13、14の検出結果によっては、マイクロチップ200の姿勢が適切に90[°]回転したことを判定することができないので、ステップS316を経て、制御が中断される。
【0208】
次に、制御基板300は、測定部200aをセンサヘッド30と対向させるため、アーム回転機構22を駆動して、図28(c)に示すように、姿勢検出回転角度位置から時計回りに90[°]回転させた測定回転角度位置まで回転アーム20を回転させ、その位置に停止させる。
回転アーム20が測定回転角度位置に停止すると、制御基板300は、工程(3)と同様に、センサヘッド30を移動して、支持部材30d、30eによって、測定処理位置においてチップ保持部26とセンサヘッド30との位置決めが行われかつその位置が固定支持される。
【0209】
センサヘッド30が測定処理位置に移動すると、制御基板300は、測定センサ31bに対して制御信号を出力して、レーザ発光部30cを駆動し、第1波長とは異なる第2波長のレーザ光を3つの発光素子から、これらと垂直方向に対向する測定部200aの3つの測定ポイントに向けて照射する。照射された第2波長のレーザ光は、3つの測定ポイントにそれぞれ存在する試薬混合後の血漿成分を透過し、透過光がレーザ受光部30hの3つの受光素子で受光される。そして、この受光された透過光の光量に応じたセンサ信号が信号線を介して制御基板300へと出力される。さらに、制御基板300の制御によってソレノイド39がオフにされ、工程(5)が完了する。ソレノイド39がオフにされると、コイルばね38a、38bの復元力によってセンサヘッド30がチップ回転機構部から離間し、初期位置へと復帰する。
【0210】
工程(5)が完了すると、引き続き、ステップS354を経て、工程(6)が行われる。
工程(6)が開始されると、制御基板300は、受光素子からのセンサ信号を示す第2測定結果データを外部コンピュータへと出力して、工程(6)が完了する。
外部コンピュータでは、制御基板300からの第1測定結果データおよび第2測定結果データに基づいて、血漿中の酸素化ヘモグロビン量、脱酸素化ヘモグロビン量、総ヘモグロビン量等を分析する。
【0211】
このようにして、本実施の形態では、垂直方向の軸回りに回転可能な回転アーム20と、回転アーム20を回転させるアーム回転機構22と、マイクロチップ200を保持するためのチップ保持部26と、回転アーム20におけるその回転中心から離れた位置に設けられ、垂直方向の軸回りにチップ保持部26を回転可能なチップ回転台23と、チップ回転台23を回転させる回転台回転機構25と、測定回転角度位置においてチップ保持部26に保持されたマイクロチップ200の測定部200aにレーザ光を照射しかつその透過光を受光可能な測定センサ31a、31bと、チップ保持部26に設けられ、光反射特性を有する被検出部26cと、姿勢検出回転角度位置においてマイクロチップ200の姿勢が正姿勢回転角度位置であるときに被検出部26cにレーザ光を照射しかつその反射光を受光可能な姿勢センサ13と、姿勢検出回転角度位置においてマイクロチップ200の姿勢が右姿勢回転角度位置であるときに被検出部26cにレーザ光を照射しかつその反射光を受光可能な姿勢センサ14とを備え、左姿勢回転角度位置でマイクロチップ200の姿勢を保持しアーム回転機構22により回転を行う第1遠心分離制御、および正姿勢回転角度位置でマイクロチップ200の姿勢を保持しアーム回転機構22により回転を行う第2遠心分離制御を行う。
【0212】
これにより、姿勢センサ13、14により、マイクロチップ200の姿勢が正姿勢回転角度位置または右姿勢回転角度位置であることを検出することができるので、従来に比して、マイクロチップ200の姿勢を正確に変更することができる。また、姿勢センサ13、14は、チップ保持部26の被検出部26cにレーザ光を照射してその反射光を受光する構成となっているので、回転アーム20およびチップ回転台23の外部に設置することができ、配線構造の簡素化を図ることができる。さらに、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じた場合は、回転台回転機構25により、正姿勢回転角度位置または右姿勢回転角度位置の前後を回転させても、姿勢センサ13、14で反射光を受光できず被検出部26cを検出できないことがあるので、障害が生じたことを判定することができる。さらに、マイクロチップ200の姿勢を正確に変更することができるので、測定結果が不十分となる可能性を低減することができる。
【0213】
さらに、本実施の形態では、チップ保持部26の回転軸方向に鍔状に突出してチップ保持部26の外周の異なる箇所に設けられた2つの被検出部26c、26dを備え、姿勢センサ13は、姿勢検出回転角度位置において、マイクロチップ200の姿勢が正姿勢回転角度位置であるときに被検出部26cに、マイクロチップ200の姿勢が左姿勢回転角度位置であるときに被検出部26dにレーザ光を照射しかつその反射光を受光可能であり、姿勢センサ14は、姿勢検出回転角度位置において、マイクロチップ200の姿勢が右姿勢回転角度位置であるときに被検出部26cに、マイクロチップ200の姿勢が正姿勢回転角度位置であるときに被検出部26dにレーザ光を照射しかつその反射光を受光可能である。
【0214】
これにより、正姿勢回転角度位置、右姿勢回転角度位置および左姿勢回転角度位置を検出することができるので、正姿勢回転角度位置、右姿勢回転角度位置および左姿勢回転角度位置のいずれかにマイクロチップ200の姿勢を正確に変更することができる。
さらに、本実施の形態では、回転台回転機構25は、所定単位の制御により90[°]ごとにチップ回転台23を回転させる。
【0215】
これにより、さらに逆姿勢回転角度位置を検出することができるので、正姿勢回転角度位置、右姿勢回転角度位置、逆姿勢回転角度位置および左姿勢回転角度位置のいずれかにマイクロチップ200の姿勢を正確に変更することができる。
さらに、本実施の形態では、左姿勢回転角度位置でマイクロチップ200の姿勢を保持しアーム回転機構22により回転アーム20を所定回数回転させる第1分離回転制御を第1遠心分離制御として行い、アーム回転機構22により姿勢検出回転角度位置まで回転アーム20を回転させ、姿勢センサ13、14の検出結果に基づいて、回転台回転機構25により正姿勢回転角度位置にマイクロチップ200の姿勢を変更する姿勢制御と、姿勢制御で変更後の姿勢を保持しアーム回転機構22により回転アーム20を所定回数回転させる第2分離回転制御とを第2遠心分離制御として行う。
【0216】
これにより、姿勢センサ13、14の検出結果に基づいて、回転台回転機構25により正姿勢回転角度位置にマイクロチップ200の姿勢が変更されるので、マイクロチップ200の姿勢をさらに正確に変更することができる。
さらに、本実施の形態では、姿勢センサ13、14の検出結果に基づいて、回転台回転機構25により正姿勢回転角度位置にマイクロチップ200の姿勢を変更し、アーム回転機構22により測定回転角度位置まで回転アーム20を回転させ、測定センサ31aにより測定処理を行う第1測定制御、および、姿勢センサ13、14の検出結果に基づいて、回転台回転機構25により右姿勢回転角度位置にマイクロチップ200の姿勢を変更し、アーム回転機構22により測定回転角度位置まで回転アーム20を回転させ、測定センサ31bにより測定処理を行う第2測定制御を行う。
【0217】
これにより、測定回転角度位置において測定センサ31a、31bの測定範囲に測定部200aが属することとなる回転角度位置にマイクロチップ200の姿勢が変更され、測定回転角度位置まで回転アーム20が回転し、測定センサ31a、31bにより測定処理が行われるので、測定処理を行うためにマイクロチップ200の姿勢を手動で変更しなくてもすむ。
【0218】
さらに、本実施の形態では、姿勢センサ13、14の検出結果に基づいて姿勢検出回転角度位置で回転アーム20を停止させる。
これにより、姿勢センサ13、14を併用して回転アーム20の位置決めを行うことができるので、回転アーム20に回転センサを別途設けなくてもすむ。
さらに、本実施の形態では、姿勢センサ13、14の検出結果に基づいて、マイクロチップ200の姿勢が適切に90[°]回転しないと判定したときは、制御を中断する。
【0219】
これにより、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じた場合は、制御が中断されるので、安全性を向上することができる。
さらに、本実施の形態では、検体液分析装置100は、遠心力付与装置2において、アーム回転機構22により回転アーム20を回転駆動することができるとともに、駆動回路22bに供給する制御信号を制御する。
【0220】
これにより、回転アーム20を所望の回転角度位置に停止することができる。
さらに、本実施の形態では、遠心力付与装置2は、回転台駆動力伝達機構27を駆動してカム25aを上下動させる。
これにより、チップ保持部26に保持されたマイクロチップ200の姿勢を変更することができる。
【0221】
さらに、本実施の形態では、遠心力付与装置2は、回転アーム20の両端部に、その重心位置に対して長尺方向の対称位置にチップ回転機構部を設けた。
これにより、回転アーム20の両端の重量バランスを平衡に保つことができ、回転アーム20を安定したバランスで高速回転させることができる。
さらに、本実施の形態では、遠心力付与装置2は、回転台駆動力伝達機構27を、基台1側にショックアブソーバ27cを固定支持し、ソレノイド本体27aの駆動で直進運動するソレノイドシャフト27bの後端部に衝撃吸収ブラケット27eを結合し、ソレノイドシャフト27bが直進運動時に衝撃吸収ブラケット27eがピストンロッドの先端に衝突する構成とした。
【0222】
これにより、突き上げ動作におけるソレノイドシャフト27bの直進移動時の衝撃を吸収することができる。
さらに、本実施の形態では、遠心力付与装置2は、回転台駆動力伝達機構27を構成するソレノイドシャフト27bの先端部に、緩衝部材27fを介してプッシャ27gを連結した。
【0223】
これにより、プッシャ27gが伝達部25cに衝突したときの衝撃を吸収することができる。
さらに、本実施の形態では、遠心力付与装置2は、コイルばね25fを、コイルばね25fの縮み時の捩れ力による回転方向とばね25fの巻き方向とが同じで、かつばね25fの縮んだ状態から復元時の回転方向とばね25fの巻き方向とは逆の方向とが同じ方向となる構造とした。
【0224】
これにより、コイルばね25fの伸縮時における両端部の摺動抵抗を低減することができる。したがって、コイルばね25fの伸縮動作を滑らかにすることができるので、回転台回転軸24を滑らかに回転させることができる。
さらに、本実施の形態では、遠心力付与装置2は、回転台回転機構25を構成するコイルばね25fの上端部と回転アーム20との間と、コイルばね25fの下端部と伝達部25cとの間とに、リング形状の低摺動部材25gを設けた。
【0225】
これにより、コイルばね25fの両端部の摺動抵抗をさらに低減することができる。したがって、コイルばね25fの伸縮動作をより滑らかにすることができるので、回転台回転軸24をより滑らかに回転させることができる。
さらに、本実施の形態では、遠心力付与装置2は、回転台回転機構25を構成するカム25a、上側カム用ピン25d、下側カム用ピン25e、回転台回転軸24を形成する部品の材質の組み合わせを上記(A)〜(D)のいずれかの組み合わせで構成した。
【0226】
これにより、これらの部品の間でのかじりによって回転台回転軸24の回転が妨げられる状態が発生するのを防ぎまたは低減することができる。
さらに、本実施の形態では、遠心力付与装置2は、上端カム面25jの傾斜面25mを、垂直方向に右上から左下に向かう傾斜面とし、下端カム面25oの傾斜面25pを、垂直方向に右下から左上に向かう傾斜面とし、さらに回転アーム20の回転方向を時計回り方向とした。
【0227】
そのため、回転アーム20を時計回りに高速回転させて遠心力を付与したときに、下側カム用ピン25eには、下端カム面25oを構成するピン嵌合溝25qの壁に向かって押し付けられる方向に力が加わる。
これにより、遠心力付与時に、回転台回転軸24が回転するのを防止することができるので、遠心力の付与時に、マイクロチップ200の姿勢が変更するのを防止することができる。
【0228】
さらに、本実施の形態では、遠心力付与装置2は、チップ保持部26を、マイクロチップ200の外周全体を枠部26bで囲んで保持し、かつ押さえ部材26bによって、マイクロチップ200の一部を上から押さえる構成とした。
これにより、マイクロチップ200がどのような回転角度位置にあっても、遠心力の付与中に遠心力によってマイクロチップ200がチップ保持部26から脱離するのを防止でき、かつ、振動等によって上方向への力が発生しても、マイクロチップ200を浮上し難くできる。
【0229】
さらに、本実施の形態では、遠心力付与装置2は、回転台回転機構25と回転台駆動力伝達機構27とを別体とし、回転台回転軸24に沿ったカム25aの垂直方向の上下動によって、回転台駆動力伝達機構27の突き上げ力を回転台回転軸24の回転力へと変換する構成とした。
これにより、回転台回転軸24を回転させるのに、回転台回転軸24を垂直方向に上下動させる必要がないため、チップ回転台23およびチップ保持部26を上下動させずにその場で回転させることができる。したがって、チップ回転台23、回転台回転軸24およびチップ保持部26を垂直方向に上下動させる構造にしなくてもすむ(上下動不能に固定できる)ので、例えば、アーム回転軸21の回転がアンバランスとなって、これらの構成部に上方向の力が加わっても、構成部が浮上するのを確実に防止することができる。
【0230】
さらに、本実施の形態では、光学式測定装置3は、センサヘッド30を、上方側角柱部材36a、スライドレール32、33に沿ってチップ回転機構部に対して接近および離間移動する構成とした。
これにより、センサヘッド30の接近および離間方向への移動時の前後方向および上下方向の動きを抑えることができ、センサヘッド30を基台1の上面と平行に保ちながら接近および離間方向に確実に直進移動させることができる。したがって、チップ保持部26の位置決めを精度よく行うことができ、正確な測定処理位置への移動に対する再現性を確保することができる。
【0231】
さらに、本実施の形態では、光学式測定装置3は、2つのレーザ発光部30b、30cを設けるとともに、レーザ発光部30b、30cの互いの発光素子を、L字を左右逆にしたような配列とした。
これにより、マイクロチップ200の姿勢を90[°]変更することで、同じ測定回転角度位置で、波長が異なる2種類の測定を行うことができる。
【0232】
さらに、本実施の形態では、光学式測定装置3は、発光ヘッド30aと受光ヘッド30fとを形成する部材を黒色の絶縁部材とした。
これにより、発光ヘッド30aの各発光素子から照射されたレーザ光が受光ヘッド30fの表面で反射する反射量を大幅に低減することができる。したがって、反射光による誤動作の発生等を低減することができる。
【0233】
さらに、絶縁部材の性質によって、発光ヘッド30aに設けられた発光素子同士が電気的に干渉し合うのを低減することができる。これにより、電気的干渉によるレーザ光への不具合(波長の変化等)の発生を低減することができる。
さらに、受光ヘッド30fに設けられた複数の受光素子を形成する金属部材にノイズが乗るのを防ぎまたはノイズの乗る量を低減することもできる。これにより、ノイズによる測定結果の誤差の発生を防ぎまたは誤差量を低減することができる。
【0234】
さらに、本実施の形態では、光学式測定装置3は、発光ヘッド30aおよび受光ヘッド30fの後端側および前端側に支持部材30d、30eを設け、センサヘッド30を遠心力付与装置2側に移動させたときに、支持部材30d、30eの傾斜面がチップ保持部26の角部と接触する構成とした。
これにより、測定処理位置においてチップ保持部26とセンサヘッド30との位置決めを行いかつその位置を固定支持することができる。
【0235】
上記第1の実施の形態において、マイクロチップ200は、発明1ないし3、5、6または8のチップに対応し、回転アーム20は、発明1、2、5ないし7の第1回転体に対応し、アーム回転機構22は、発明1、2、5または6の第1回転手段に対応し、チップ回転台23は、発明1ないし3の第2回転体に対応している。また、回転台回転機構25は、発明1、2、5または6の第2回転手段に対応し、姿勢センサ13は、発明1ないし3、5ないし8の第1姿勢センサに対応し、姿勢センサ14は、発明1ないし3、5ないし8の第2姿勢センサに対応し、ステップS300〜S304は、発明1、2、5若しくは8の第1遠心分離制御、または発明5の第1分離回転制御に対応している。
【0236】
また、上記第1の実施の形態において、ステップS306〜S336は、発明1、2、5または8の第2遠心分離制御に対応し、ステップS306〜S324は、発明5の姿勢制御に対応し、ステップS326〜S336は、発明5の第2分離回転制御に対応し、ステップS300〜S336は、発明1、2または7の遠心分離制御手段に対応している。また、ステップS318〜S324、S338〜S342は、発明6の第1測定制御に対応し、ステップS348〜S352は、発明6の第2測定制御に対応し、ステップS318〜S324、S338〜S352は、発明6の測定制御手段に対応している。
【0237】
また、上記第1の実施の形態において、ステップS324、S316は、発明8の制御禁止手段に対応し、正姿勢回転角度位置は、発明1ないし3、5、6若しくは8の第1回転角度位置、または発明6の第1測定姿勢回転角度位置に対応し、右姿勢回転角度位置は、発明1ないし3、5、6若しくは8の第2回転角度位置、または発明6の第2測定姿勢回転角度位置に対応している。また、左姿勢回転角度位置は、発明3、5、6または8の第3回転角度位置に対応し、測定センサ31aの測定範囲は、発明6の第1測定範囲に対応し、測定センサ31bの測定範囲は、発明6の第2測定範囲に対応している。
〔第1の実施の形態の変形例〕
なお、上記第1の実施の形態において、被検出部26dは、被検出部26cが設けられた第1辺の右隣の第2辺の外周面に設けて構成したが、これに限らず、被検出部26cが設けられた第1辺の左隣の第3辺の外周面に設けて構成することもできる。
【0238】
このような構成であれば、姿勢検出回転角度位置においてマイクロチップ200の姿勢が正姿勢回転角度位置であるときは、姿勢センサ13は、被検出部26cにレーザ光を照射しかつその反射光を受光することができるが、姿勢センサ14は、その光軸上に被検出部26c、26dが存在しないため反射光を受光できない。そのため、姿勢センサ13はONのセンサ信号を、姿勢センサ14はOFFのセンサ信号を出力する。したがって、姿勢センサ13のセンサ信号がONで、姿勢センサ14のセンサ信号がOFFのときは、マイクロチップ200の姿勢が正姿勢回転角度位置であることを検出することができる。
【0239】
姿勢検出回転角度位置においてマイクロチップ200の姿勢が右姿勢回転角度位置であるときは、姿勢センサ13は、被検出部26dにレーザ光を照射しかつその反射光を受光することができるとともに、姿勢センサ14は、被検出部26cにレーザ光を照射しかつその反射光を受光することができる。そのため、姿勢センサ13、14はいずれもONのセンサ信号を出力する。したがって、姿勢センサ13、14のセンサ信号がいずれもONのときは、マイクロチップ200の姿勢が右姿勢回転角度位置であることを検出することができる。
【0240】
姿勢検出回転角度位置においてマイクロチップ200の姿勢が逆姿勢回転角度位置であるときは、姿勢センサ13は、その光軸上に被検出部26c、26dが存在しないため反射光を受光できないが、姿勢センサ14は、被検出部26dにレーザ光を照射しかつその反射光を受光することができる。そのため、姿勢センサ13はOFFのセンサ信号を、姿勢センサ14はONのセンサ信号を出力する。したがって、姿勢センサ13のセンサ信号がOFFで、姿勢センサ14のセンサ信号がONのときは、マイクロチップ200の姿勢が逆姿勢回転角度位置であることを検出することができる。
これにより、正姿勢回転角度位置、右姿勢回転角度位置および逆姿勢回転角度位置を検出することができるので、正姿勢回転角度位置、右姿勢回転角度位置および左姿勢回転角度位置のいずれかにマイクロチップ200の姿勢を正確に変更することができる。
【0241】
姿勢検出回転角度位置においてマイクロチップ200の姿勢が左姿勢回転角度位置であるときは、姿勢センサ13、14はいずれも、その光軸上に被検出部26c、26dが存在しないため反射光を受光できない。そのため、姿勢センサ13、14はいずれもOFFのセンサ信号を出力する。したがって、姿勢センサ13、14のセンサ信号がいずれもOFFのときは、マイクロチップ200の姿勢が左姿勢回転角度位置であることを検出することができる。この場合、姿勢センサ13、14のセンサ信号がいずれもOFFであるので、姿勢センサ13、14のセンサ信号からでは、マイクロチップ200の姿勢が左姿勢回転角度位置なのか、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じたのか区別がつかないことがある。そこで、例えば、左姿勢回転角度位置からチップ回転台23を1回転させることにより障害か否かを判定することができる。障害でない場合は、正姿勢回転角度位置、右姿勢回転角度位置および逆姿勢回転角度位置でONのセンサ信号を得ることができ、障害である場合は、いずれかの回転角度位置で正常なセンサ信号を得ることができないので、左姿勢回転角度位置なのか障害が生じたのかを区別することができる。なお、上記第1の実施の形態において、逆姿勢回転角度位置を判定する場合にも、姿勢センサ13、14のセンサ信号がいずれもOFFであるので、同様に適用することができる。
【0242】
これにより、さらに左姿勢回転角度位置を検出することができるので、正姿勢回転角度位置、右姿勢回転角度位置、逆姿勢回転角度位置および左姿勢回転角度位置のいずれかにマイクロチップ200の姿勢を正確に変更することができる。
【0243】
この場合において、マイクロチップ200は、発明4のチップに対応し、チップ回転台23は、発明4の第2回転体に対応し、姿勢センサ13は、発明4の第1姿勢センサに対応し、姿勢センサ14は、発明4の第2姿勢センサに対応し、正姿勢回転角度位置は、発明4の第1回転角度位置に対応している。また、右姿勢回転角度位置は、発明4の第2回転角度位置に対応し、逆姿勢回転角度位置は、発明4の第3回転角度位置に対応している。
【0244】
また、上記第1の実施の形態においては、回転アーム20の一端の側に2つの姿勢センサ13、14を設けて構成したが、これに限らず、図29に示すように、回転アーム20の一端の側に2つの姿勢センサ13a、14aを、回転アーム20の他端の側に2つの姿勢センサ13b、14bを設けて構成することもできる。
【0245】
図29は、回転アーム20の両端の側に姿勢センサ13a、14a、13b、14bを設けた場合を示す図である。
これにより、回転アーム20の両端のチップ保持部26に保持されたマイクロチップ200の姿勢をそれぞれ検出することができる。また、姿勢検出回転角度位置で回転アーム20を停止させる制御をさらに正確に行うことができる。
姿勢センサ13bは、図29に示すように、回転アーム20の回転中心に対して姿勢センサ13aと対称の位置に設けられているとともに、姿勢センサ14aの光軸上から外れた位置に設けられている。これにより、姿勢センサ13a、14aからのレーザ光の干渉を受けることなく検出を行うことができる。
【0246】
姿勢センサ14bは、回転アーム20の回転中心に対して姿勢センサ14aと対称の位置に設けられているとともに、姿勢センサ13aの光軸上から外れた位置に設けられている。これにより、姿勢センサ13a、14aからのレーザ光の干渉を受けることなく検出を行うことができる。
また、図29の構成においては、マイクロチップ200の姿勢が逆姿勢回転角度位置であるときは、姿勢センサ13a、14a、13b、14bのセンサ信号がいずれもOFFとなる。この場合、姿勢センサ13a、14a、13b、14bのセンサ信号からでは、マイクロチップ200の姿勢が逆姿勢回転角度位置なのか、チップ保持部26の破損やマイクロチップ200の脱落といった障害が生じたのか区別がつかないことがある。
【0247】
そこで、逆姿勢回転角度位置のときにONのセンサ信号が得られるように姿勢センサ13bを基台1の左内周面に設置する。具体的には、姿勢センサ13bは、マイクロチップ200の姿勢が右姿勢回転角度位置であるときに被検出部26dに、マイクロチップ200の姿勢が逆姿勢回転角度位置であるときに被検出部26cにレーザ光を照射しかつその反射光を受光可能とする。そして、例えば、姿勢検出回転角度位置においてマイクロチップ200の姿勢が逆姿勢回転角度位置であるときは、回転アーム20を180[°]回転させることにより障害か否かを判定することができる。障害でない場合は、姿勢センサ13bでONのセンサ信号を得ることができ、障害である場合は、正常なセンサ信号を得ることができないので、逆姿勢回転角度位置なのか障害が生じたのかを区別することができる。
【0248】
また、上記第1の実施の形態において、姿勢センサ13、14は、光軸が互いに平行となるように配置したが、これに限らず、光軸が互いに直交するように配置することもできる。例えば、姿勢センサ13の光軸が左右方向となるように姿勢センサ13を基台1の左内周面に設置すればよい。
また、上記第1の実施の形態においては、2つの被検出部26c、26dを設けて構成したが、これに限らず、被検出部26c、26dのいずれか一方のみを設けて構成することもできる。
【0249】
これにより、被検出部26cのみを設ける場合は、正姿勢回転角度位置および右姿勢回転角度位置を、被検出部26dのみを設ける場合は、正姿勢回転角度位置および左姿勢回転角度位置を検出することができる。
また、上記第1の実施の形態においては、チップ保持部26の回転軸方向に鍔状に突出してチップ保持部26の外周の異なる箇所に2つの被検出部26c、26dを設けて構成したが、これに限らず、チップ保持部26の外周面に形成され、外周面とは異なる光反射特性を有する被検出部を設けて構成することもできる。ここで、被検出部は、例えば、ミラー、外周面とは異なる色彩、外周面とは異なる模様、または外周面とは異なる起伏形状により実現することができる。
【0250】
また、上記第1の実施の形態において、図23ないし図25のフローチャートに示す処理を実行するにあたってはいずれも、ROM304にあらかじめ格納されている制御プログラムを実行する場合について説明したが、これに限らず、これらの手順を示したプログラムが記憶された記憶媒体から、そのプログラムをRAM306に読み込んで実行するようにしてもよい。
【0251】
ここで、記憶媒体とは、RAM、ROM等の半導体記憶媒体、FD、HD等の磁気記憶型記憶媒体、CD、CDV、LD、DVD等の光学的読取方式記憶媒体、MO等の磁気記憶型/光学的読取方式記憶媒体であって、電子的、磁気的、光学的等の読み取り方法のいかんにかかわらず、コンピュータで読み取り可能な記憶媒体であれば、あらゆる記憶媒体を含むものである。
【0252】
また、上記第1の実施の形態においては、本発明に係る遠心力付与装置および検体液分析装置を、検体液を遠心分離し分析する場合について適用したが、これに限らず、本発明の主旨を逸脱しない範囲で他の場合にも適用可能である。
【0253】
〔第2の実施の形態〕
次に、本発明の第2の実施の形態を図面を参照しながら説明する。図30ないし図32は、本発明に係る遠心力付与装置および検体液分析装置の第2の実施の形態を示す図である。
【0254】
上記第1の実施の形態では、図12に示すように、回転台駆動力伝達機構27としてソレノイド本体27aによる駆動機構を採用したのに対し、本実施の形態では、モータおよびカム機構による駆動機構を採用する点が異なる。なお、以下、上記第1の実施の形態と異なる部分についてのみ説明し、重複する部分については同一の符号を付して説明を省略する。
【0255】
上記第1の実施の形態のように、ショックアブソーバ27c付きソレノイドでは衝撃を完全には吸収できないため、マイクロチップ200内の液体が攪拌されてしまうという問題が想定される。この対策として、本実施の形態は、モータおよびカム機構による駆動機構を採用することにより、プッシャ27gの突き上げ速度の調整が可能となり、マイクロチップ200の回転時の衝撃を低減することを実現する。
【0256】
本実施の形態に係る回転台駆動力伝達機構27の構成を説明する。
図30は、遠心力付与装置2の正面図である。
図31は、遠心力付与装置2の側面図である。
回転台駆動力伝達機構27は、図30および図31に示すように、モータ27hと、モータ27hの回転駆動により回転する板カム27iと、板カム27iに従動して上下動する突き上げシャフト27jと、突き上げシャフト27jを軸支するリニアブッシュ27kと、突き上げシャフト27jの先端に取り付けられたプッシャ27gとを有して構成されている。
【0257】
モータ27hは、回転軸27lが水平となるように配置されている。モータ27hとしては、例えば、DCモータまたはステッピングモータを採用することができる。本実施の形態では、DCモータと減速機を組み合わせて構成した。これにより、小型モータで大きいトルクを得ることができ、装置の小型化が可能となる。また、モータ回転数(入力電圧)を制御することによりプッシャ27gの突き上げ速度を調整(例えば、遅く)することができるので、マイクロチップ200の回転時の衝撃を低減することができる。なお、モータ27hに代えて、回転の駆動力を得ることができるアクチュエータを採用することもできる。
【0258】
板カム27iは、モータ27hの回転軸27lに取り付けられている。なお、板カム27iに代えて、溝カム、円筒カム、斜板カム、端面カムまたは球面カム等のカム機構を採用することもできる。
突き上げシャフト27jは、垂直に配置され、その下端が板カム27iの外周面上端に当接している。突き上げシャフト27jには、コイルばね27mが巻き付けられているとともに、フランジ状のストッパ27nが形成されている。コイルばね27mは、ストッパ27nとリニアブッシュ27kの間に介挿され、その下端がストッパ27nにより係止される。突き上げシャフト27jは、コイルばね27mの付勢力によりその下端が板カム27iに押し付けられ、常に、その下端が板カム27iの外周面に接する状態となる。そのため、突き上げシャフト27jを板カム27iに従動させることができる。
【0259】
リニアブッシュ27kは、基台1の下面に取り付けられ、突き上げシャフト27jを軸支している。これにより、突き上げシャフト27jは、水平方向の移動が拘束され垂直方向にのみ変位可能となる。
同じ材料の金属同士を摺動させた場合に発生しやすいかじりを防止するために、板カム27i、突き上げシャフト27j、プッシャ27gは、それぞれ異なる材料で構成することが好ましい。例えば、ナイロン、S45C等の炭素鋼、SUS304等のステンレス、黄鋼、A5052のようなアルミ合金の組み合わせで構成することができる。本実施の形態では、板カム27iをS45C、突き上げシャフト27jをA5052、プッシャ27gをナイロンで構成した。
【0260】
回転台駆動力伝達機構27は、さらに、図示しないが、突き上げシャフト27jの上下方向の位置を検出する位置検出センサを有して構成されている。これにより、制御基板300では、位置検出センサからのセンサ信号に基づいて突き上げシャフト27jの位置を判定することができるので、入力パルス数によって位置決めを行うステッピングモータでなくても、オン・オフ制御のみを行うDCモータを使用し、突き上げシャフト27jの上下動を制御することができる。
【0261】
次に、本実施の形態の動作を説明する。
図32は、回転台駆動力伝達機構27の動作を示す図である。
制御基板300は、まず、マイクロチップ200の姿勢を変更するために、回転台駆動力伝達機構27に制御信号を出力し、モータ27hを駆動させる。モータ27hが駆動すると、モータ27hの駆動力により板カム27iが回転し、図32(c)、同図(a)の順に状態が遷移し、板カム27iに従動して突き上げシャフト27jが上方に直進移動する。これに伴って、プッシャ27gが上方に直進移動し、姿勢検出回転角度位置に停止している回転台回転機構25の伝達部25cを突き上げる。これにより、伝達部25cと一体形成されたカム25aが回転台回転軸24に沿って突き上げられる。
【0262】
カム25aが突き上げられると、上端カム面25jと、上側カム用ピン25dとによって、突き上げ力が回転台回転軸24の回転力へと変換され、回転台回転軸24が時計回りに回転する。
その後、モータ27hをさらに駆動させると、モータ27hの駆動力により板カム27iが回転し、同図(a)、同図(b)、同図(c)の順に状態が遷移し、板カム27iに従動して突き上げシャフト27jが下方に直進移動する。これに伴って、プッシャ27gが下方に直進移動し、伝達部25cから離間する。回転台回転機構25では、カム25aが回転台回転軸24に沿って下方向に直進移動し、下端カム面25oと、下側カム用ピン25eとによって、カム25aの下方向の移動力が回転台回転軸24の回転力へと変換され、回転台回転軸24がさらに時計回りに回転する。
【0263】
このようにして、本実施の形態では、モータ27hと、モータ27hの回転駆動により回転する板カム27iと、板カム27iに従動して上下動する突き上げシャフト27jと、突き上げシャフト27jの先端に取り付けられたプッシャ27gとを備える。
これにより、プッシャ27gの突き上げ速度の調整が可能となり、マイクロチップ200の回転時の衝撃を低減することができる。
【0264】
上記第2の実施の形態において、チップ回転台23は、発明9の第2回転体に対応し、回転台回転機構25は、発明9の第2回転手段に対応し、回転台駆動力伝達機構27は、発明9の駆動力伝達手段に対応し、モータ27hは、発明9の回転駆動手段に対応している。
【0265】
〔第3の実施の形態〕
次に、本発明の第3の実施の形態を図面を参照しながら説明する。図33ないし図35は、本発明に係る遠心力付与装置および検体液分析装置の第3の実施の形態を示す図である。
【0266】
上記第1の実施の形態では、図15に示すように、センサヘッド30の移動機構としてソレノイド39による駆動機構を採用したのに対し、本実施の形態では、モータおよびクランク機構による駆動機構を採用する点が異なる。なお、以下、上記第1の実施の形態と異なる部分についてのみ説明し、重複する部分については同一の符号を付して説明を省略する。
【0267】
上記第1の実施の形態のように、ソレノイド39による駆動機構の場合、センサヘッド30をチップ回転機構部に接近させ測定を行う場合、測定中常にソレノイド39に電流を流しておく必要がある。そのため、ソレノイド39が発熱源となり、装置内温度管理が困難であった。検体液分析装置100では、精度保障のため装置内温度を細かく制御する必要があり、発熱の少ない機構への変更が求められる。この対策として、本実施の形態は、モータ駆動およびクランク機構を採用することにより、センサヘッド30の移動時にのみモータを駆動すればよいので、発熱を抑えることができ、装置内温度管理を精密に行うことを実現する。
【0268】
本実施の形態に係るセンサヘッド30の移動機構を説明する。
図33は、光学式測定装置3の正面図である。
図34は、光学式測定装置3の側面図である。
光学式測定装置3は、図33および図34に示すように、モータ39aと、モータ39aの回転駆動により回転するクランク円盤39bと、クランク円盤39bの盤面上に一端が固定されたコネクティングロッド39cと、コネクティングロッド39cの他端に連結しセンサヘッド30の移動方向に変位可能な伝達シャフト39dと、伝達シャフト39dの先端に取り付けられた伝達部材41とを有して構成されている。
【0269】
モータ39aは、回転軸39eが水平でかつセンサヘッド30の移動方向に直交するように配置されている。モータ39aとしては、例えば、DCモータまたはステッピングモータを採用することができる。なお、モータ39aに代えて、回転の駆動力を得ることができるアクチュエータを採用することもできる。
コネクティングロッド39cの一端は、クランク円盤39bの盤面上に、クランクピン39fによりその軸回りに回転自在に固定されている。また、コネクティングロッド39cの他端は、伝達シャフト39dの末端に、クランクピン39gによりその軸回りに回転自在に固定されている。
【0270】
伝達シャフト39dは、図示しない支持部材により垂直方向の移動が拘束されセンサヘッド30の移動方向にのみ変位可能となっている。伝達シャフト39dには、所定間隔をあけて2つのフランジ39h、39iが形成されている。そして、フランジ39h、39iの間には伝達部材41が外嵌され、伝達部材41とフランジ39iの間にはコイルばね39jが巻き付けられている。
【0271】
光学式測定装置3は、さらに、図示しないが、コネクティングロッド39cの一端がチップ回転機構部に最も接近したときの伝達部材41の位置を検出する第1位置検出センサを有して構成されている。これにより、制御基板300では、第1位置検出センサからのセンサ信号に基づいてセンサヘッド30がチップ保持部26に当接したことを判定することができるので、そのタイミングでモータ39aを停止させることにより、センサヘッド30をチップ保持部26に固定した状態で保持することができる。
【0272】
光学式測定装置3は、さらに、図示しないが、コネクティングロッド39cの一端がチップ回転機構部から最も離間したとき(図33、図34の状態)の伝達部材41の位置を検出する第2位置検出センサを有して構成されている。これにより、制御基板300では、第2位置検出センサからのセンサ信号に基づいてセンサヘッド30が初期位置に復帰したことを判定することができるので、そのタイミングでモータ39aを停止させることにより、センサヘッド30を初期状態に保持することができる。
【0273】
次に、本実施の形態の動作を説明する。
図35は、光学式測定装置3の動作を示す図である。
初期状態では、図35(a)の状態となり、伝達部材41は、フランジ39hによってチップ回転機構部とは反対の方向に押されるので、センサヘッド30をチップ回転機構部から離間させることができる。これにより、アーム回転機構22により回転アーム20を回転させることができる。
【0274】
回転アーム20が測定回転角度位置に停止すると、制御基板300は、モータ39aに制御信号を出力し、モータ39aを駆動させる。モータ39aが駆動すると、モータ39aの駆動力によりクランク円盤39bが回転し、同図(a)、同図(b)、同図(c)の順に状態が遷移し、クランク円盤39bに従動してコネクティングロッド39cの一端が回転する。これに伴って、伝達シャフト39dがチップ回転機構部の方向に直進移動する。伝達部材41は、伝達シャフト39dの直進運動力を、連結部材38cを介して、センサヘッド30に略同時に伝達する。これにより、センサヘッド30の結合部を介して伝達された直進運動力によって、スライダ34、35の固着されたセンサヘッド30が、上方側角柱部材36a、スライドレール32、33のレール部に沿ってチップ回転機構部の方向に直進移動する。センサヘッド30は、支持部材30d、30eがチップ保持部26の角部に当接するまで直進移動する。当接後、チップ回転機構部の方向への移動量は、伝達部材41とフランジ39iの間に設けられたコイルばね39jによって吸収される。そして、支持部材30d、30eによってチップ保持部26の角部を押さえ付けることで、測定処理位置においてチップ保持部26とセンサヘッド30との位置決めが行われかつその位置が固定支持される。
【0275】
センサヘッド30が測定処理位置に移動すると、制御基板300は、上記第1の実施の形態と同様に、測定センサ31aに制御信号を出力してレーザ発光部30bにより測定を行う。
測定が完了すると、制御基板300は、モータ39aに制御信号を出力し、モータ39aを再度駆動させる。モータ39aが駆動すると、モータ39aの駆動力によりクランク円盤39bが回転し、同図(c)、同図(a)の順に状態が遷移し、クランク円盤39bに従動してコネクティングロッド39cの一端が回転する。これに伴って、伝達シャフト39dがチップ回転機構部とは反対の方向に直進移動し、センサヘッド30がチップ回転機構部から離間し、初期位置へと復帰する。
【0276】
このようにして、本実施の形態では、モータ39aと、モータ39aの回転駆動により回転するクランク円盤39bと、クランク円盤39bの盤面上に一端が固定されたコネクティングロッド39cと、コネクティングロッド39cの他端に連結しセンサヘッド30の移動方向に変位可能な伝達シャフト39dと、伝達シャフト39dの先端に取り付けられた伝達部材41とを備える。
【0277】
これにより、センサヘッド30の移動時にのみモータ39aを駆動すればよいので、発熱を抑えることができ、装置内温度管理を精密に行うことができる。
上記第3の実施の形態において、スライドレール32、33、スライダ34、35およびモータ39aは、発明10の移動手段に対応し、モータ39aは、発明10の回転駆動手段に対応している。
【0278】
〔第2および第3の実施の形態の変形例〕
なお、上記第2の実施の形態に対して上記第3の実施の形態を適用することもできる。
また、上記第2の実施の形態における回転台駆動力伝達機構27に対して上記第3の実施の形態のクランク機構を適用することもできる。
【0279】
また、上記第3の実施の形態におけるセンサヘッド30の移動機構に対して上記第2の実施の形態のカム機構を適用することもできる。
また、上記第2および第3の実施の形態に対して上記第1の実施の形態の変形例を適用することもできる。
【図面の簡単な説明】
【0280】
【図1】検体液分析装置100の概略構成を示す斜視図である。
【図2】検体液分析装置100の概略構成を示す平面図である。
【図3】遠心力付与装置2の概略構成を示す正面図である。
【図4】遠心力付与装置2の遠心力付与時の回転バランスを均衡させる構成を示す図である。
【図5】アーム回転機構22の構成を示すブロック図である。
【図6】マイクロチップ200の形状例を示す図である。
【図7】チップ保持部26の構造例を示す図である。
【図8】姿勢センサ13、14の検出動作を示す図である。
【図9】マイクロチップ200の装着例を示す図である。
【図10】回転台回転機構25の構成を示す側面図である。
【図11】カム25aの構成を示す図である。
【図12】回転台駆動力伝達機構27の構成を示す垂直方向の断面図である。
【図13】プッシャ27gで突き上げ時の回転台回転機構25の動作を示す図である。
【図14】プッシャ27gで突き上げ後の回転台回転機構25の動作を示す図である。
【図15】光学式測定装置3の構成を示す図である。
【図16】センサヘッド30のスライド移動動作の一例を示す図である。
【図17】センサヘッド30の構成を示す図である。
【図18】黒色の絶縁部材を用いて形成されたセンサヘッド30の一例を示す図である。
【図19】温度調整装置4の内部構成を示す図である。
【図20】検体液分析装置100の内部における空気の流れの一例を示す図である。
【図21】基台1の上面部における空気の流れの一例を示す図である。
【図22】制御基板300の構成を示すブロック図である。
【図23】チップセット処理を示すフローチャートである。
【図24】モータ原点確定処理を示すフローチャートである。
【図25】検体液分析処理を示すフローチャートである。
【図26】遠心力付与時の動作を示す図である。
【図27】マイクロチップ200の姿勢変更時の動作を示す図である。
【図28】光学式測定装置3の測定処理時の動作を示す図である。
【図29】回転アーム20の両端の側に姿勢センサ13a、14a、13b、14bを設けた場合を示す図である。
【図30】遠心力付与装置2の正面図である。
【図31】遠心力付与装置2の側面図である。
【図32】回転台駆動力伝達機構27の動作を示す図である。
【図33】光学式測定装置3の正面図である。
【図34】光学式測定装置3の側面図である。
【図35】光学式測定装置3の動作を示す図である。
【符号の説明】
【0281】
100…検体液分析装置、 200…マイクロチップ、 200a…測定部、 1…基台、 2…遠心力付与装置、 3…光学式測定装置、 4…温度調整装置、 5…遮光カバー、 12…プレート、 13、13a、13b、14、14a、14b…姿勢センサ、 10、11、16、17…通風口、 15…開閉シャッタ、 20…回転アーム、 21…アーム回転軸、 22…アーム回転機構、 23…チップ回転台、 24…回転台回転軸、 25…回転台回転機構、 26…チップ保持部、 22a…ステッピングモータ、 22b…駆動回路、 25a…カム、 25b…ガイド部、 25c…伝達部、 25d…上側カム用ピン、 25e…下側カム用ピン、 25f…コイルばね、 25g…低摺動部材、 25j…上端カム面、 25m、25p…傾斜面、 25n、25r…壁、 25q…ピン嵌合溝、 25t…係合溝、 25o…下端カム面、 26a…枠部、 26b…チップ押さえ部、 26c、26d…被検出部、 27…回転台駆動力伝達機構、 27a…ソレノイド本体、 27b、40…ソレノイドシャフト、 27c…ショックアブソーバ、 27d…支持ブラケット、 27e…衝撃吸収ブラケット、 27f…緩衝部材、 27g…プッシャ、 28、39…ソレノイド、 30…センサヘッド、 30a…発光ヘッド、 30b、30c…レーザ発光部、 30d、30e…支持部材、 30f…受光ヘッド、 30g、30h…レーザ受光部、 38a、38b…コイルばね、 38c…連結部材、 32、33…スライドレール、 34、35…スライダ、 36…スライド補助部材、 37…心棒、 38…戻り用ばね部、 41…伝達部材、 50…調温部、 51、55…温度センサ、 52…ファン、 53…発熱体、 54…筐体、 300…制御基板、 302…CPU、 304…ROM、 306…RAM、 308…駆動指令出力I/F、 310…センサ入力I/F、 312…通信I/F、 27h、39a…モータ、 27i…板カム、 27j…突き上げシャフト、 27k…リニアブッシュ、 27l、39e…回転軸、 27m、39j…コイルばね、 ストッパ27n、 39b…クランク円盤、 39c…コネクティングロッド、 39d…伝達シャフト、 39f、39g…クランクピン、 39h、39i…フランジ
【特許請求の範囲】
【請求項1】
所定方向に付与される遠心力に応じて、検体液の成分を分離し、分離後の成分を当該チップの所定位置に案内可能な検体液分析用のチップを、前記所定方向に遠心力が付与される姿勢で保持し回転させることにより、前記チップに対して前記所定方向に遠心力を付与する遠心力付与装置であって、
前記所定方向と直交する軸回りに回転可能な第1回転体と、
前記第1回転体を回転させる第1回転手段と、
前記チップを保持するためのチップ保持部と、
前記第1回転体におけるその回転中心から離れた位置に設けられ、前記直交する軸回りに前記チップ保持部を回転可能な第2回転体と、
前記第2回転体を回転させる第2回転手段と、
前記チップの姿勢を保持し前記第1回転手段により回転を行う第1遠心分離制御、および前記第1遠心分離制御時とは異なる前記第2回転体の回転角度位置で前記チップの姿勢を保持し前記第1回転手段により回転を行う第2遠心分離制御を行う遠心分離制御手段と、
前記チップ保持部に設けられ、光反射特性を有する被検出部と、
前記チップの姿勢を検出するための前記第1回転体の回転角度位置である姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第1回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第1姿勢センサと、
前記姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第2回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第2姿勢センサとを備えることを特徴とする遠心力付与装置。
【請求項2】
光学的な測定処理を行う測定部を有し、所定方向に付与される遠心力に応じて、検体液の成分を分離し、分離後の成分と試薬とを混合し、試薬混合後の成分を前記測定部に案内可能な検体液分析用のチップを、前記所定方向に遠心力が付与される姿勢で保持し回転させることにより、前記チップに対して前記所定方向に遠心力を付与し、前記測定部に対して前記測定処理を行う検体液分析装置であって、
前記所定方向と直交する軸回りに回転可能な第1回転体と、
前記第1回転体を回転させる第1回転手段と、
前記チップを保持するためのチップ保持部と、
前記第1回転体におけるその回転中心から離れた位置に設けられ、前記直交する軸回りに前記チップ保持部を回転可能な第2回転体と、
前記第2回転体を回転させる第2回転手段と、
前記チップの姿勢を保持し前記第1回転手段により回転を行う第1遠心分離制御、および前記第1遠心分離制御時とは異なる前記第2回転体の回転角度位置で前記チップの姿勢を保持し前記第1回転手段により回転を行う第2遠心分離制御を行う遠心分離制御手段と、
前記チップを測定するための前記第1回転体の回転角度位置である測定回転角度位置において前記チップ保持部に保持されたチップの前記測定部に光を照射しかつその透過光を受光可能な測定センサと、
前記チップ保持部に設けられ、光反射特性を有する被検出部と、
前記チップの姿勢を検出するための前記第1回転体の回転角度位置である姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第1回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第1姿勢センサと、
前記姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第2回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第2姿勢センサとを備えることを特徴とする検体液分析装置。
【請求項3】
請求項2において、
前記チップ保持部の回転軸方向に鍔状に突出して前記チップ保持部の外周の異なる箇所に設けられた2つの前記被検出部を備え、
前記第1姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第1回転角度位置であるときに一方の前記被検出部に、前記チップの姿勢が前記第2回転体の第3回転角度位置であるときに他方の前記被検出部に光を照射しかつその反射光を受光可能であり、
前記第2姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第2回転角度位置であるときに前記一方の被検出部に、前記チップの姿勢が前記第1回転角度位置であるときに前記他方の被検出部に光を照射しかつその反射光を受光可能であることを特徴とする検体液分析装置。
【請求項4】
請求項2において、
前記チップ保持部の回転軸方向に鍔状に突出して前記チップ保持部の外周の異なる箇所に設けられた2つの前記被検出部を備え、
前記第1姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第1回転角度位置であるときに一方の前記被検出部に、前記チップの姿勢が前記第2回転角度位置であるときに他方の前記被検出部に光を照射しかつその反射光を受光可能であり、
前記第2姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第2回転角度位置であるときに前記一方の被検出部に、前記チップの姿勢が前記第2回転体の第3回転角度位置であるときに前記他方の被検出部に光を照射しかつその反射光を受光可能であることを特徴とする検体液分析装置。
【請求項5】
請求項3および4のいずれか1項において、
前記第1遠心分離制御は、前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のいずれかで前記チップの姿勢を保持し前記第1回転手段により前記第1回転体を所定回数回転させる第1分離回転制御からなり、
前記第2遠心分離制御は、前記第1回転手段により前記姿勢検出回転角度位置まで前記第1回転体を回転させ、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記第2回転手段により、前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のうち前記第1分離回転制御時とは異なる回転角度位置に前記チップの姿勢を変更する姿勢制御と、前記姿勢制御で変更後の姿勢を保持し前記第1回転手段により前記第1回転体を所定回数回転させる第2分離回転制御とからなることを特徴とする検体液分析装置。
【請求項6】
請求項5において、
前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のうちいずれか2つは、前記測定回転角度位置において前記測定センサの第1測定範囲に前記測定部が属することとなる第1測定姿勢回転角度位置と、前記測定回転角度位置において前記測定センサの第2測定範囲に前記測定部が属することとなる第2測定姿勢回転角度位置とであり、
さらに、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記第2回転手段により前記第1測定姿勢回転角度位置に前記チップの姿勢を変更し、前記第1回転手段により前記測定回転角度位置まで前記第1回転体を回転させ、前記測定センサにより前記測定処理を行う第1測定制御、並びに、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記第2回転手段により前記第2測定姿勢回転角度位置に前記チップの姿勢を変更し、前記第1回転手段により前記測定回転角度位置まで前記第1回転体を回転させ、前記測定センサにより前記測定処理を行う第2測定制御を行う測定制御手段を備えることを特徴とする検体液分析装置。
【請求項7】
請求項5および6のいずれか1項において、
前記遠心分離制御手段は、前記第1姿勢センサまたは前記第2姿勢センサの検出結果に基づいて前記姿勢検出回転角度位置で前記第1回転体を停止させることを特徴とする検体液分析装置。
【請求項8】
請求項5ないし7のいずれか1項において、
さらに、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記チップの姿勢が、前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のいずれかであることを判定できないときは、前記第1遠心分離制御または前記第2遠心分離制御を禁止する制御禁止手段を備えることを特徴とする検体液分析装置。
【請求項9】
請求項2ないし8のいずれか1項において、
さらに、前記第2回転手段に駆動力を伝達する駆動力伝達手段を備え、
前記駆動力伝達手段は、
回転駆動手段と、
前記回転駆動手段の回転駆動により回転するカムと、
前記カムに従動して直線方向に変位可能なシャフトと、
前記シャフトの先端に取り付けられたプッシャとを有し、
前記第2回転手段は、前記プッシャの直進移動を回転運動に変換することにより前記第2回転体を回転させることを特徴とする検体液分析装置。
【請求項10】
請求項2ないし9のいずれか1項において、
さらに、前記チップ保持部の回転軌跡外の位置から前記測定回転角度位置まで前記測定センサを移動させる移動手段を備え、
前記移動手段は、
回転駆動手段と、
前記回転駆動手段の回転駆動により回転する円盤と、
前記円盤の盤面上に一端が固定されたコネクティングロッドと、
前記コネクティングロッドの他端に連結し前記測定センサの移動方向に変位可能なシャフトと、
前記シャフトの先端に取り付けられた伝達部材とを有し、
前記伝達部材の直進移動により前記測定センサを移動させることを特徴とする検体液分析装置。
【請求項1】
所定方向に付与される遠心力に応じて、検体液の成分を分離し、分離後の成分を当該チップの所定位置に案内可能な検体液分析用のチップを、前記所定方向に遠心力が付与される姿勢で保持し回転させることにより、前記チップに対して前記所定方向に遠心力を付与する遠心力付与装置であって、
前記所定方向と直交する軸回りに回転可能な第1回転体と、
前記第1回転体を回転させる第1回転手段と、
前記チップを保持するためのチップ保持部と、
前記第1回転体におけるその回転中心から離れた位置に設けられ、前記直交する軸回りに前記チップ保持部を回転可能な第2回転体と、
前記第2回転体を回転させる第2回転手段と、
前記チップの姿勢を保持し前記第1回転手段により回転を行う第1遠心分離制御、および前記第1遠心分離制御時とは異なる前記第2回転体の回転角度位置で前記チップの姿勢を保持し前記第1回転手段により回転を行う第2遠心分離制御を行う遠心分離制御手段と、
前記チップ保持部に設けられ、光反射特性を有する被検出部と、
前記チップの姿勢を検出するための前記第1回転体の回転角度位置である姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第1回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第1姿勢センサと、
前記姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第2回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第2姿勢センサとを備えることを特徴とする遠心力付与装置。
【請求項2】
光学的な測定処理を行う測定部を有し、所定方向に付与される遠心力に応じて、検体液の成分を分離し、分離後の成分と試薬とを混合し、試薬混合後の成分を前記測定部に案内可能な検体液分析用のチップを、前記所定方向に遠心力が付与される姿勢で保持し回転させることにより、前記チップに対して前記所定方向に遠心力を付与し、前記測定部に対して前記測定処理を行う検体液分析装置であって、
前記所定方向と直交する軸回りに回転可能な第1回転体と、
前記第1回転体を回転させる第1回転手段と、
前記チップを保持するためのチップ保持部と、
前記第1回転体におけるその回転中心から離れた位置に設けられ、前記直交する軸回りに前記チップ保持部を回転可能な第2回転体と、
前記第2回転体を回転させる第2回転手段と、
前記チップの姿勢を保持し前記第1回転手段により回転を行う第1遠心分離制御、および前記第1遠心分離制御時とは異なる前記第2回転体の回転角度位置で前記チップの姿勢を保持し前記第1回転手段により回転を行う第2遠心分離制御を行う遠心分離制御手段と、
前記チップを測定するための前記第1回転体の回転角度位置である測定回転角度位置において前記チップ保持部に保持されたチップの前記測定部に光を照射しかつその透過光を受光可能な測定センサと、
前記チップ保持部に設けられ、光反射特性を有する被検出部と、
前記チップの姿勢を検出するための前記第1回転体の回転角度位置である姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第1回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第1姿勢センサと、
前記姿勢検出回転角度位置において前記チップの姿勢が前記第2回転体の第2回転角度位置であるときに前記被検出部に光を照射しかつその反射光を受光可能な第2姿勢センサとを備えることを特徴とする検体液分析装置。
【請求項3】
請求項2において、
前記チップ保持部の回転軸方向に鍔状に突出して前記チップ保持部の外周の異なる箇所に設けられた2つの前記被検出部を備え、
前記第1姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第1回転角度位置であるときに一方の前記被検出部に、前記チップの姿勢が前記第2回転体の第3回転角度位置であるときに他方の前記被検出部に光を照射しかつその反射光を受光可能であり、
前記第2姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第2回転角度位置であるときに前記一方の被検出部に、前記チップの姿勢が前記第1回転角度位置であるときに前記他方の被検出部に光を照射しかつその反射光を受光可能であることを特徴とする検体液分析装置。
【請求項4】
請求項2において、
前記チップ保持部の回転軸方向に鍔状に突出して前記チップ保持部の外周の異なる箇所に設けられた2つの前記被検出部を備え、
前記第1姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第1回転角度位置であるときに一方の前記被検出部に、前記チップの姿勢が前記第2回転角度位置であるときに他方の前記被検出部に光を照射しかつその反射光を受光可能であり、
前記第2姿勢センサは、前記姿勢検出回転角度位置において、前記チップの姿勢が前記第2回転角度位置であるときに前記一方の被検出部に、前記チップの姿勢が前記第2回転体の第3回転角度位置であるときに前記他方の被検出部に光を照射しかつその反射光を受光可能であることを特徴とする検体液分析装置。
【請求項5】
請求項3および4のいずれか1項において、
前記第1遠心分離制御は、前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のいずれかで前記チップの姿勢を保持し前記第1回転手段により前記第1回転体を所定回数回転させる第1分離回転制御からなり、
前記第2遠心分離制御は、前記第1回転手段により前記姿勢検出回転角度位置まで前記第1回転体を回転させ、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記第2回転手段により、前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のうち前記第1分離回転制御時とは異なる回転角度位置に前記チップの姿勢を変更する姿勢制御と、前記姿勢制御で変更後の姿勢を保持し前記第1回転手段により前記第1回転体を所定回数回転させる第2分離回転制御とからなることを特徴とする検体液分析装置。
【請求項6】
請求項5において、
前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のうちいずれか2つは、前記測定回転角度位置において前記測定センサの第1測定範囲に前記測定部が属することとなる第1測定姿勢回転角度位置と、前記測定回転角度位置において前記測定センサの第2測定範囲に前記測定部が属することとなる第2測定姿勢回転角度位置とであり、
さらに、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記第2回転手段により前記第1測定姿勢回転角度位置に前記チップの姿勢を変更し、前記第1回転手段により前記測定回転角度位置まで前記第1回転体を回転させ、前記測定センサにより前記測定処理を行う第1測定制御、並びに、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記第2回転手段により前記第2測定姿勢回転角度位置に前記チップの姿勢を変更し、前記第1回転手段により前記測定回転角度位置まで前記第1回転体を回転させ、前記測定センサにより前記測定処理を行う第2測定制御を行う測定制御手段を備えることを特徴とする検体液分析装置。
【請求項7】
請求項5および6のいずれか1項において、
前記遠心分離制御手段は、前記第1姿勢センサまたは前記第2姿勢センサの検出結果に基づいて前記姿勢検出回転角度位置で前記第1回転体を停止させることを特徴とする検体液分析装置。
【請求項8】
請求項5ないし7のいずれか1項において、
さらに、前記第1姿勢センサおよび前記第2姿勢センサの検出結果に基づいて、前記チップの姿勢が、前記第1回転角度位置、前記第2回転角度位置および前記第3回転角度位置のいずれかであることを判定できないときは、前記第1遠心分離制御または前記第2遠心分離制御を禁止する制御禁止手段を備えることを特徴とする検体液分析装置。
【請求項9】
請求項2ないし8のいずれか1項において、
さらに、前記第2回転手段に駆動力を伝達する駆動力伝達手段を備え、
前記駆動力伝達手段は、
回転駆動手段と、
前記回転駆動手段の回転駆動により回転するカムと、
前記カムに従動して直線方向に変位可能なシャフトと、
前記シャフトの先端に取り付けられたプッシャとを有し、
前記第2回転手段は、前記プッシャの直進移動を回転運動に変換することにより前記第2回転体を回転させることを特徴とする検体液分析装置。
【請求項10】
請求項2ないし9のいずれか1項において、
さらに、前記チップ保持部の回転軌跡外の位置から前記測定回転角度位置まで前記測定センサを移動させる移動手段を備え、
前記移動手段は、
回転駆動手段と、
前記回転駆動手段の回転駆動により回転する円盤と、
前記円盤の盤面上に一端が固定されたコネクティングロッドと、
前記コネクティングロッドの他端に連結し前記測定センサの移動方向に変位可能なシャフトと、
前記シャフトの先端に取り付けられた伝達部材とを有し、
前記伝達部材の直進移動により前記測定センサを移動させることを特徴とする検体液分析装置。
【図1】


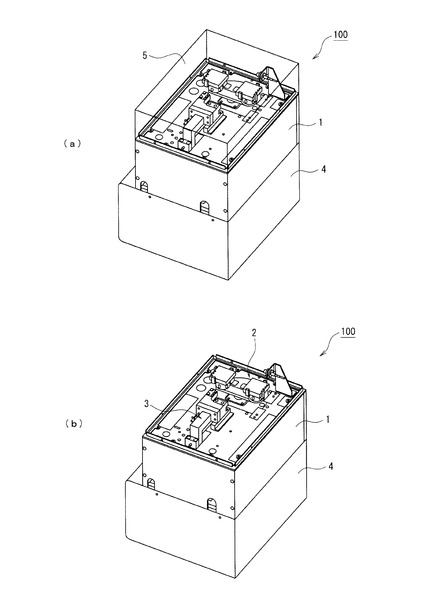
【図2】
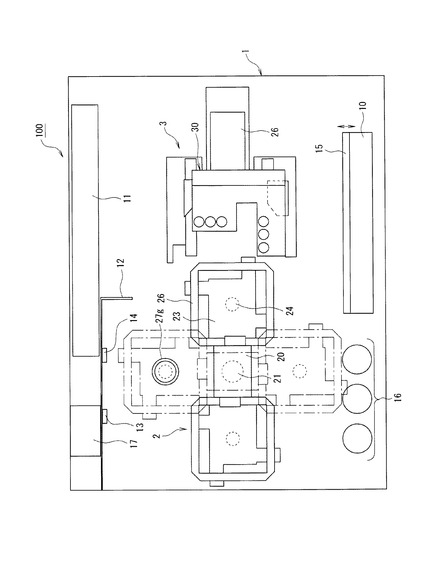
【図3】

【図4】
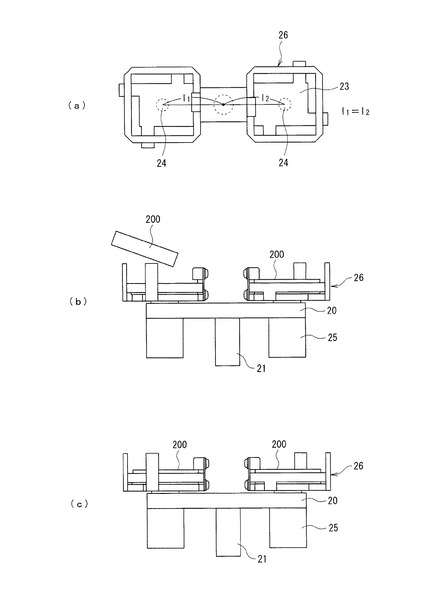
【図5】
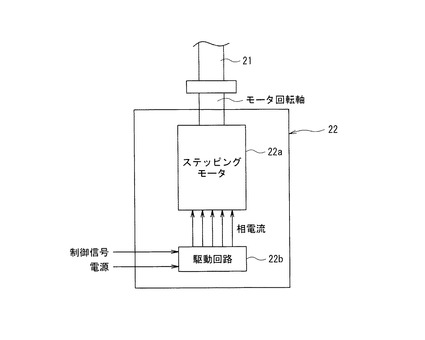
【図6】
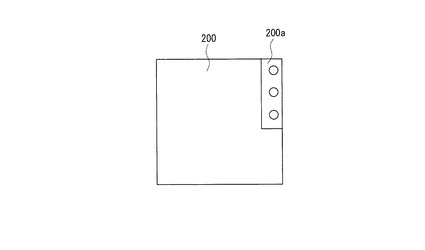
【図7】
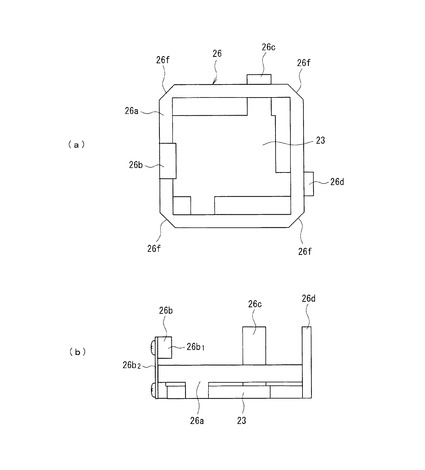
【図8】
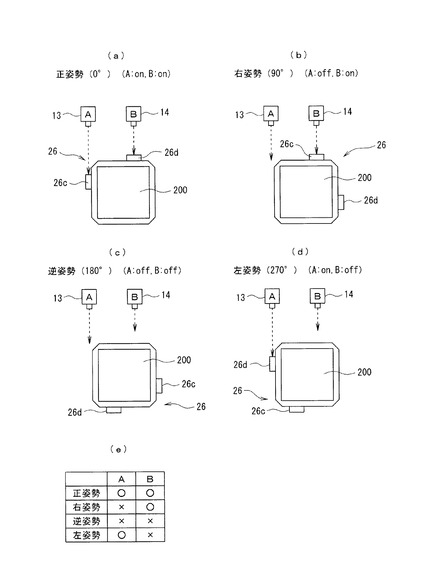
【図9】
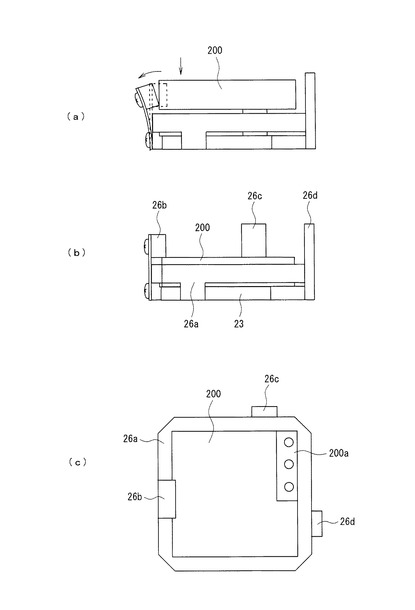
【図10】
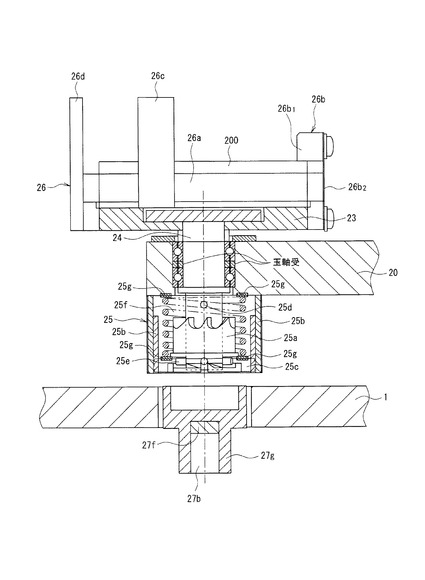
【図11】
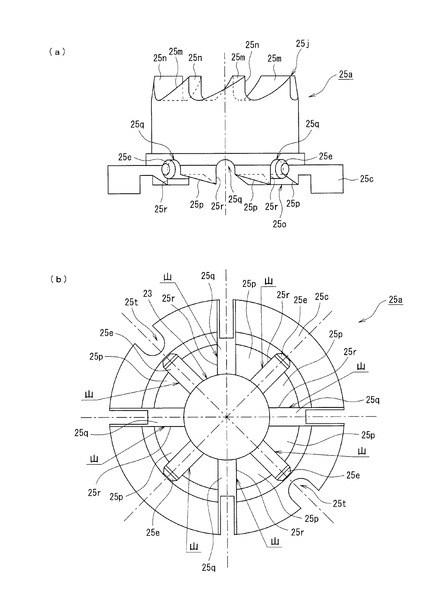
【図12】
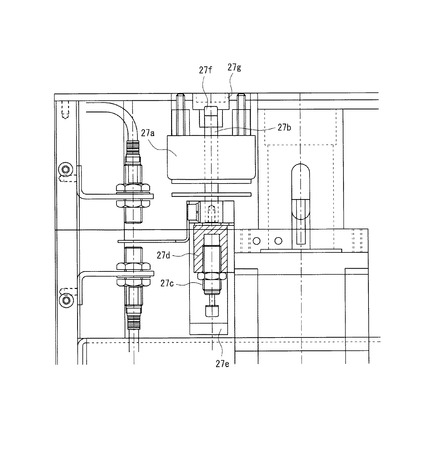
【図13】
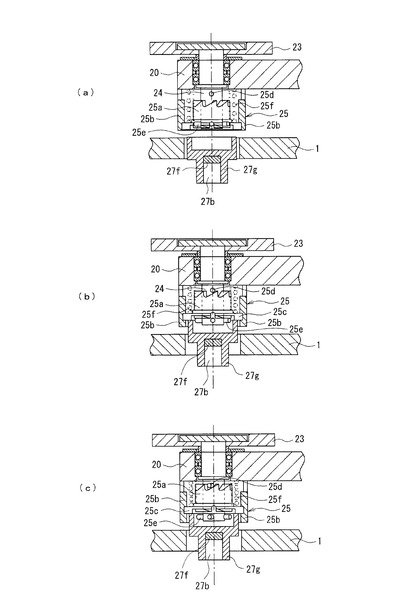
【図14】
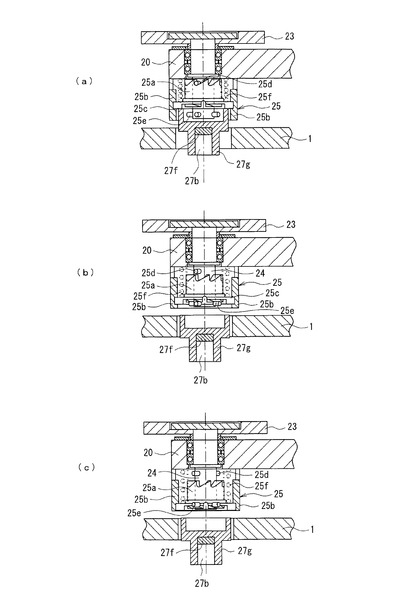
【図15】

【図16】
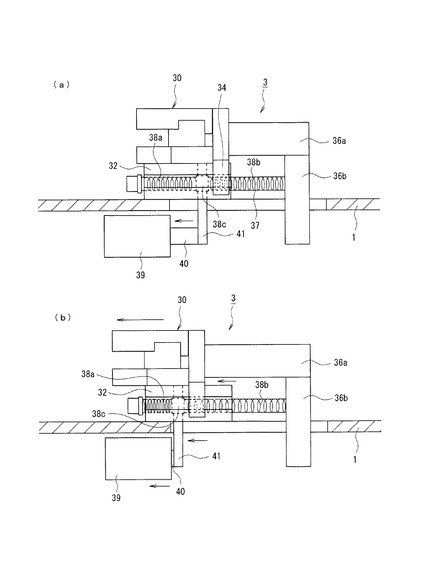
【図17】

【図18】
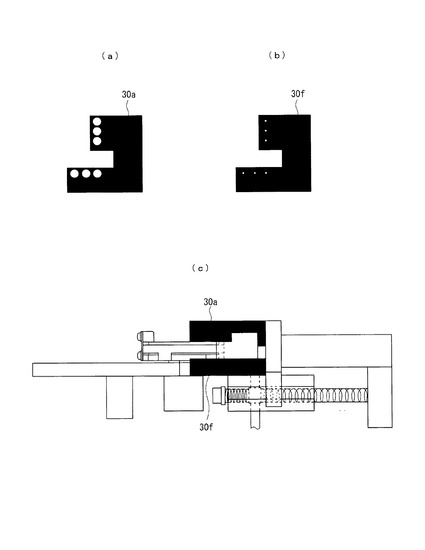
【図19】
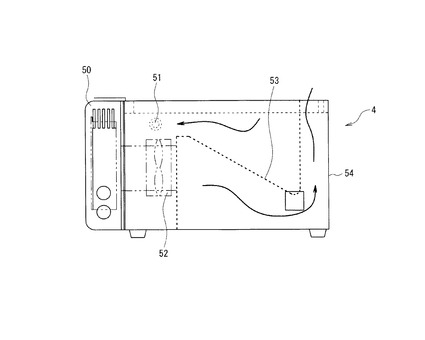
【図20】
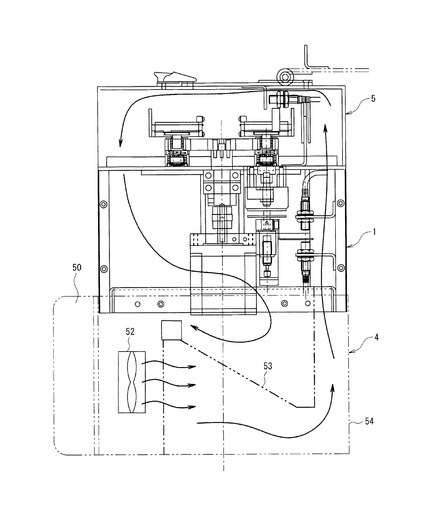
【図21】
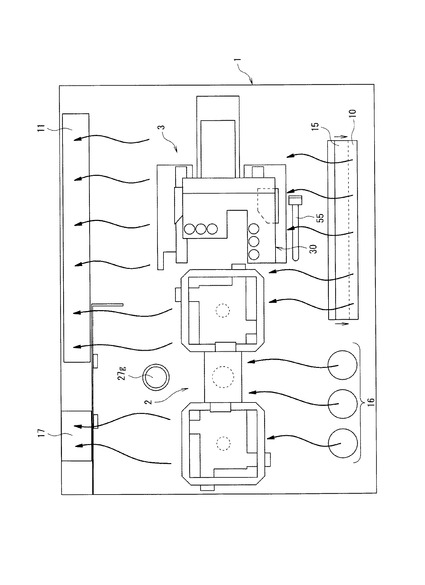
【図22】
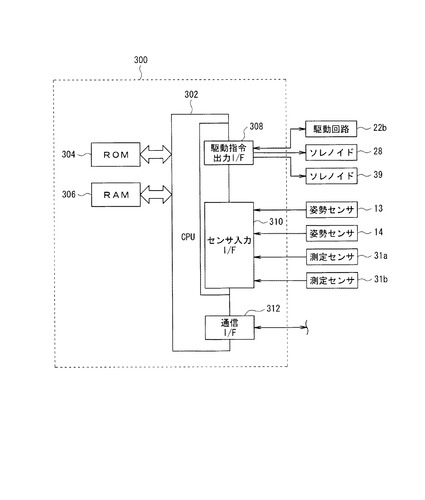
【図23】
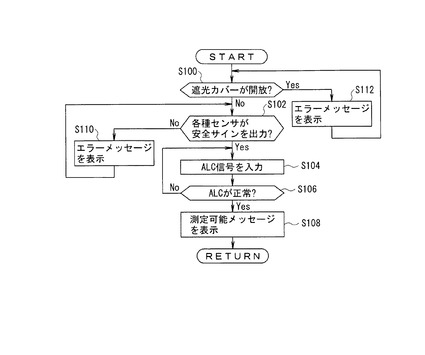
【図24】
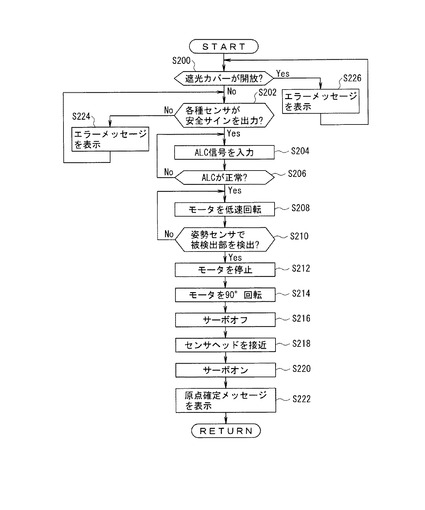
【図25】
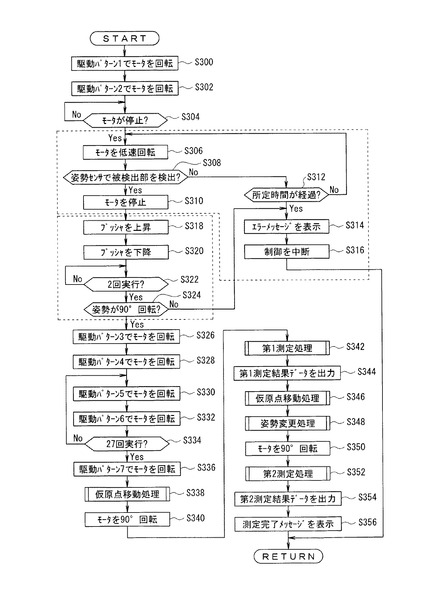
【図26】
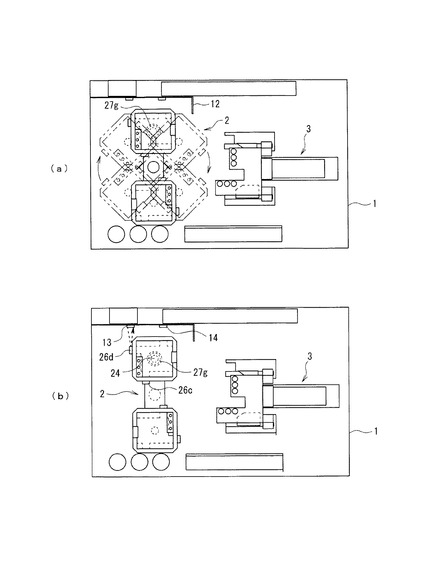
【図27】
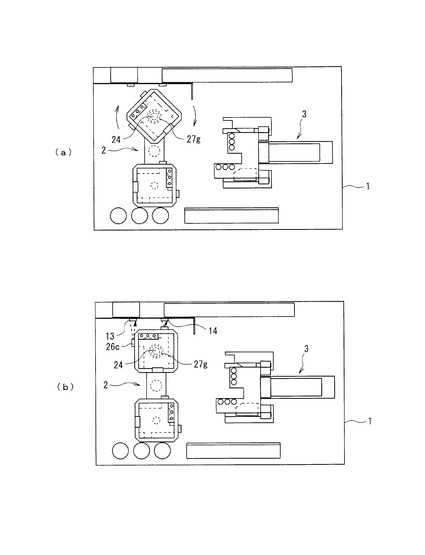
【図28】
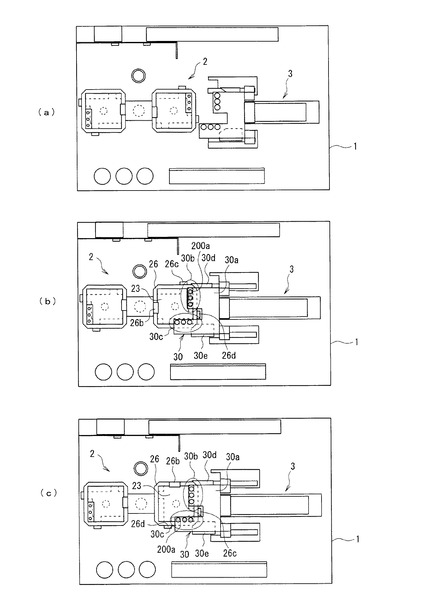
【図29】
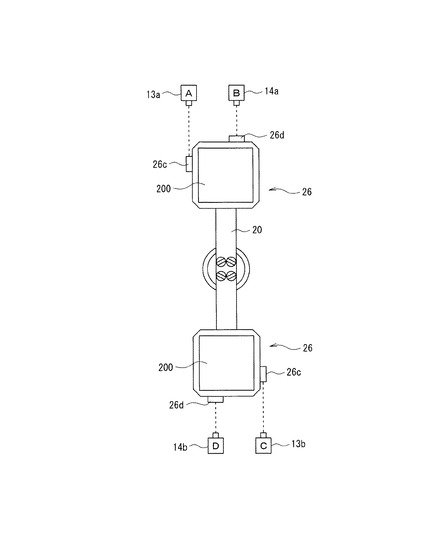
【図30】
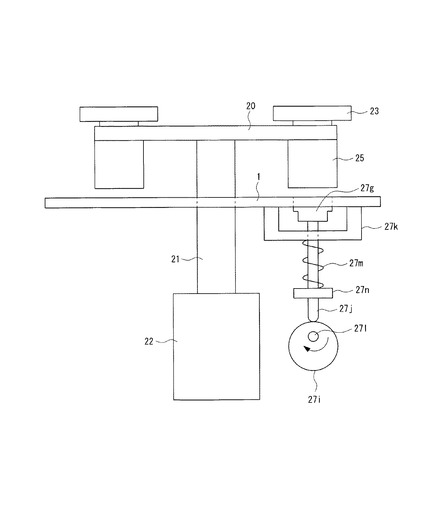
【図31】
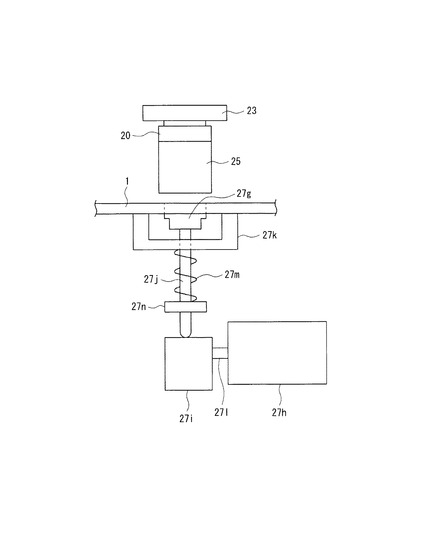
【図32】
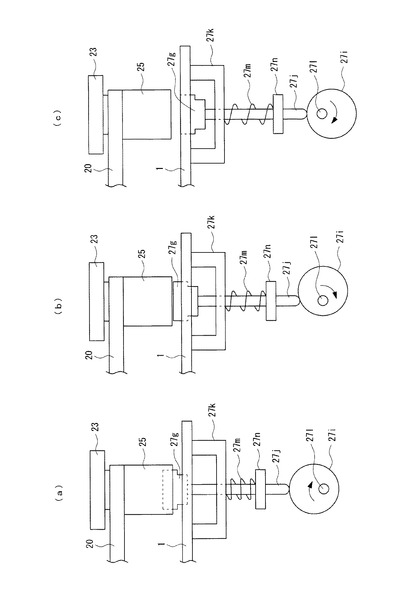
【図33】
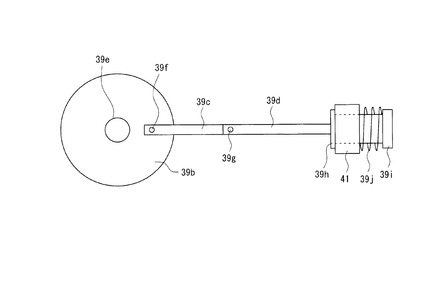
【図34】
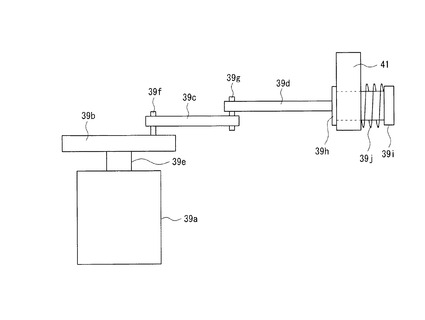
【図35】
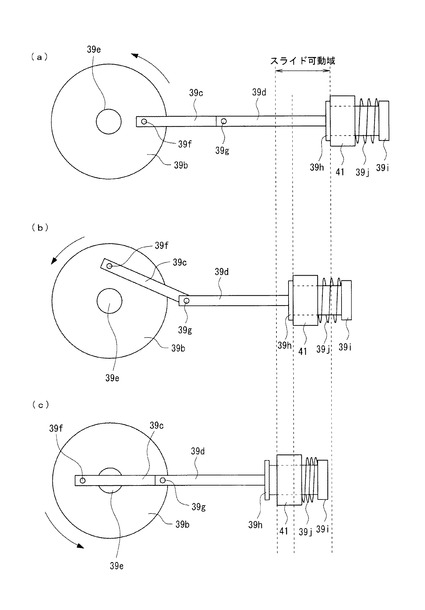
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【公開番号】特開2009−133816(P2009−133816A)
【公開日】平成21年6月18日(2009.6.18)
【国際特許分類】
【出願番号】特願2008−155405(P2008−155405)
【出願日】平成20年6月13日(2008.6.13)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成21年6月18日(2009.6.18)
【国際特許分類】
【出願日】平成20年6月13日(2008.6.13)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]