
遠心模型実験装置
【課題】遠心模型実験装置の回転アームに対して簡易且つ安価に動力を供給する。
【解決手段】遠心模型実験装置は、鉛直方向に立設される中心軸11と、中心軸11から水平方向且つ直線状に延びて形成される回転アーム21と、回転アーム21に傾動自在に設置され、回転アーム21が回転運動したときに重力加速度と遠心加速度の合成加速度の方向に振り上がるように構成されるプラットホーム31と、中心軸11に対して回転駆動力を及ぼす回転駆動源41とを備える。また、遠心模型実験装置は、オイルポンプ、ピニオンギア及びラックギアとから成る油圧発生機構51を備えており、回転アーム21に油圧を供給することができるようになっている。なお、オイルポンプを発電機や圧縮空気発生ポンプとすることによって、電力や圧縮空気を得ることもできる。
【解決手段】遠心模型実験装置は、鉛直方向に立設される中心軸11と、中心軸11から水平方向且つ直線状に延びて形成される回転アーム21と、回転アーム21に傾動自在に設置され、回転アーム21が回転運動したときに重力加速度と遠心加速度の合成加速度の方向に振り上がるように構成されるプラットホーム31と、中心軸11に対して回転駆動力を及ぼす回転駆動源41とを備える。また、遠心模型実験装置は、オイルポンプ、ピニオンギア及びラックギアとから成る油圧発生機構51を備えており、回転アーム21に油圧を供給することができるようになっている。なお、オイルポンプを発電機や圧縮空気発生ポンプとすることによって、電力や圧縮空気を得ることもできる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、実物の1/Nに縮小した小型模型に重力加速度のN倍の遠心加速度を与えることで小型模型に実物の応力状態を再現し、このとき小型模型に生じる静的あるいは動的な挙動を観察することによって、精度よく現場の挙動を把握することができる遠心模型実験装置の改良に関するものである。
【背景技術】
【0002】
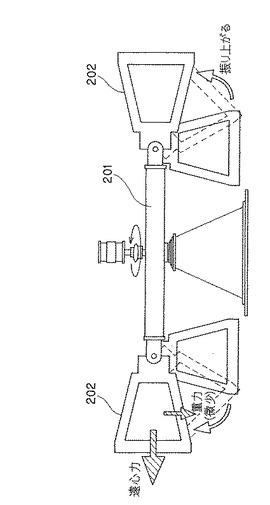
従来から、土質工学や地盤工学等の分野では、遠心模型実験装置を用いることによって、地盤の挙動を正確に予測しようとする試みが行われている。この遠心模型実験装置の概略構成は、図13に示すように、回転アーム201の両端に試料容器202を吊り下げて回転させるものであり、回転アーム201を高速(例えば、毎分20回転から150回転程度)で回転させることによって、地球の重力加速度と遠心加速度の合成加速度の方向に試料容器202が振り上がるようになっている。このとき、重力は遠心力よりも十分に小さいので、上記合成加速度はほぼ水平方向に働くことになり、回転アーム201が高速回転したときには、試料容器202の水平状態が維持されることとなる。そして、試料容器202の中に小型模型地盤を前もって作成しておけば、小型模型地盤の鉛直下向きに遠心力が作用することになり、実物の1/Nに縮小した小型模型地盤に重力加速度のN倍の遠心加速度を与えることで小型模型地盤に実物の応力状態を再現することができる。このときに小型模型地盤に生じる静的あるいは動的な挙動を観察することによって、精度よく現場の挙動を把握することが可能となる。
【0003】
上記のような遠心模型実験装置を用いた模型実験は、屋内で行うことができ、しかも現場での実験よりも安価で頻繁に行うことができるという利点を備えているので、例えば、支持力・安定問題、沈下問題、地震時挙動の解明などの多種多様な研究に用いられており、さらに近年では、波浪と構造物の相互作用、汚染物質の拡散問題、プレートテクトニクスなどの研究にも使用されている。
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところが、上述した従来の遠心模型実験装置は、高速回転する回転アーム201に対して、小型模型地盤中のミクロ的な挙動を測定する際に用いられるひずみゲージ等のセンサを動作させるための電力を供給したり、回転アーム201で消費される作動油を供給したり、さらにはセンサ等から得られたデータを外部に取り出して記録保持したりしなければならないという構造的な課題を有するものであった。
【0005】
そして従来、回転系の内と外の電力や情報のやりとりは、回転軸に取り付けてあるスリップリングを通して行われており、スリップリングは回転軸に取り付けられているリングの外側にブラシを接触させることによって結線し、回転系の内と外に電流や電気信号等を流す仕組みが採用されていた。
【0006】
しかしながら、外部から電力供給するためのスリップリングは高価であり、また、金属の滑動により電力を伝達する構造であるが故に、正常に動作させるための管理が大変であるという問題を有していた。さらに、スリップリングには、電流の流量の面での制約が存在していた。
【0007】
一方、回転アーム201で消費する油圧については、ロータリージョイントを介して外部から供給される方式が採用されていた。しかしながら、ロータリージョイントは、高圧の作動油を流す際に流量の面で制約があり、従来技術に係る遠心模型実験装置にあっては、外部の油圧源から回転アーム201に対する作動油の供給は、少量ずつしか行うことができないという問題があった。また、ロータリージョイントは、シール部を滑動させてシールする構造なので、維持管理が非常に面倒であるという問題点を有していた。
【0008】
このようなロータリージョイントの問題点を解消する方法として、従来技術では、回転アーム201にアキュムレータを用意し、このアキュムレータをチャージして瞬間的に大量の作動油を消費することが考えられるが、アキュムレータの設置は部品点数の増加によるコストアップを招くものであり、好ましくない。
【0009】
さらに別の対策として、回転アーム201に電動機とオイルポンプを設置し、回転系の内側だけで油圧の供給を実現することも考えられるが、この方式では電動機が遠心加速度に耐えられないという問題がある。
【0010】
本発明は、高速回転する回転アームで消費する動力を外部から供給することは非常に困難で制約をともなうものであるという上述した従来技術での課題の存在に鑑みて成されたものであって、その目的は、回転運動する回転アームの動力を利用することによって回転体で消費するための動力を得るという、まったく新しい遠心模型実験装置を提供することにある。
【課題を解決するための手段】
【0011】
本発明に係る遠心模型実験装置は、鉛直方向に立設されるとともに軸心を回転中心として回転駆動自在に設置される中心軸と、前記中心軸から水平方向且つ直線状に延びて形成されるとともに前記中心軸の回転駆動に従って回転運動する回転アームと、前記回転アームに傾動自在に設置され、前記回転アームが回転運動したときに重力加速度と遠心加速度の合成加速度の方向に振り上がるように構成されるプラットホームと、前記中心軸に対して回転駆動力を及ぼす回転駆動源と、を備える遠心模型実験装置であって、前記回転駆動源による前記中心軸の回転運動にともなって前記回転アームが回転運動したときに、この回転運動を利用して動力を発生させる動力発生手段を備えることを特徴とする。
【0012】
本発明に係る遠心模型実験装置において、前記動力発生手段が発生させる動力は、少なくとも油圧、電力又は圧縮空気であることとすることができる。
【0013】
本発明に係る他の遠心模型実験装置は、鉛直方向に立設されるとともに軸心を回転中心として回転駆動自在に設置される中心軸と、前記中心軸から水平方向且つ直線状に延びて形成されるとともに前記中心軸の回転駆動に従って回転運動する回転アームと、前記回転アームに傾動自在に設置され、前記回転アームが回転運動したときに重力加速度と遠心加速度の合成加速度の方向に振り上がるように構成されるプラットホームと、前記中心軸に対して回転駆動力を及ぼす回転駆動源と、を備える遠心模型実験装置であって、油圧を発生するオイルポンプと、前記オイルポンプに設置されるピニオンギアと、前記ピニオンギアと噛合する円環状のラックギアと、を備え、前記ラックギアの円環状の円中心と前記中心軸の軸心が合致するように構成されることにより、前記回転アームが回転運動したときに前記ピニオンギアが前記ラックギア上を回転して前記オイルポンプを駆動させることを特徴とする。
【0014】
本発明に係る他の遠心模型実験装置において、前記オイルポンプは前記回転アームに設置され、前記ラックギアは不動状態となるように設置されることにより、前記回転アームが回転運動したときに前記ピニオンギアが前記ラックギア上を自転しながら公転するように構成することが好適である。
【0015】
また、本発明に係る他の遠心模型実験装置は、前記合成加速度が略水平方向に働くことによって前記プラットホームが振り上がったときに、該プラットホームを前記回転アームに対して固定保持する固定手段を備え、前記固定手段は、前記オイルポンプによって発生する油圧を用いて駆動されることとすることができる。
【発明の効果】
【0016】
本発明によれば、高速回転する回転アームに対して簡易且つ安価な構成で内部消費動力を供給することが可能な、従来にない新たな遠心模型実験装置を提供することが可能である。この動力は、回転アームの回転運動を利用して得られるものであるために非常に効率が良い。また、得られる動力の種類は、油圧、電力、圧縮空気の少なくとも一つとすることができ、特に、油圧については、従来技術では実現困難であった大流量の作動油を供給することができるので、回転体である回転アームに対して所望の油圧供給を実現することが可能である。
【発明を実施するための最良の形態】
【0017】
以下、本発明を実施するための好適な実施形態について、図面を用いて説明する。なお、以下の各実施形態は、各請求項に係る発明を限定するものではなく、また、各実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【0018】
なお、以下で説明する各実施形態では、回転駆動源としてのモータによる中心軸の回転運動にともなって回転アームが回転運動したときに、この回転運動を利用して動力を発生させる動力発生手段が、オイルポンプ、ピニオンギア及びラックギアから成る油圧発生機構として構成される場合を例示して説明を行う。
【0019】
(第1の実施形態)
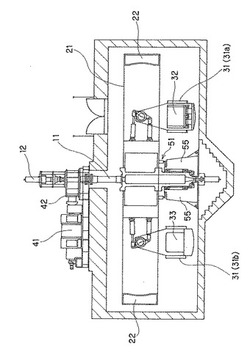
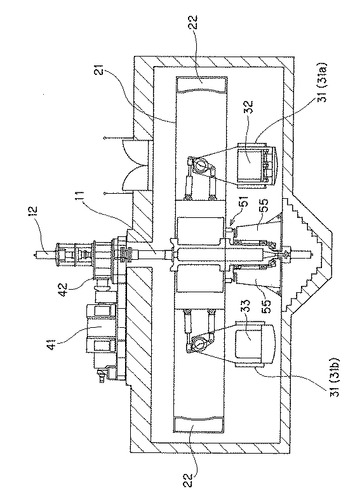
図1は、第1の実施形態に係る遠心模型実験装置の概略構成を例示する正面図であり、特に回転アームが回転していない状態を示している。一方、図2は、第1の実施形態に係る遠心模型実験装置の概略構成を例示する正面図であり、特に回転アームが高速回転することによってプラットホームが略水平方向に振り上がっている状態を示している。
【0020】
図1及び図2に示されるように、第1の実施形態に係る遠心模型実験装置は、その主要な構成部材として、中心軸11と回転アーム21、及び回転アーム21に傾動自在に設置されるプラットホーム31と中心軸11に対して回転駆動力を及ぼす回転駆動源としてのモータ41とを備えている。
【0021】
中心軸11は、鉛直方向に立設されるとともに軸心を回転中心として回転駆動自在に設置される部材であり、その回転駆動力は、減速器42を介して接続されるモータ41によって付与される。中心軸11の上方及び下方の軸端は、多数の軸受によって軸支されており、これらの軸受によって安定且つ確実な中心軸11の回転運動が実現されている。
【0022】
また、中心軸11の上方の軸端には、スリップリング12が設置されている。このスリップリング12は、回転体である回転アーム21に取り付けられたセンサやデバイスとの通信や、高速回転している回転アーム21への電力供給などを可能にする部材であり、中心軸11に取り付けてあるリングの外側にブラシを接触させることによって結線し、回転アーム21等の回転系の内と外の電気信号や電流等のやりとりを行うことができるようになっている。
【0023】
回転アーム21は、中心軸11から水平方向且つ直線状に延びて形成される部材であり、中心軸11の回転駆動に従って回転運動することができるようになっている。この回転運動は、非常に高速で行われるので、回転アーム21は大きな遠心力を十分に受容できるような剛性を備える構造体として構成されている。
【0024】
また、回転アーム21は、その両側に傾動自在に設置される一対のプラットホーム31a,31bを備えている。これらプラットホーム31a,31bは、回転アーム21が回転運動したときに重力加速度と遠心加速度の合成加速度の方向に振り上がるように構成される部材である。なお、重力は遠心力よりも十分に小さいので、上記合成加速度は略水平方向に働くことになる。したがって、回転アーム21が高速回転したときには、一対のプラットホーム31a,31bはいずれも図2において示すような水平状態を維持するように振り上がることとなる。
【0025】
そして、一方のプラットホーム31aには試料容器32が設置できるようになっており、このプラットホーム31aの水平状態が維持されることによって、試料容器32の中に形成される小型模型地盤の鉛直下向きに遠心力が作用することになり、例えば実物の1/Nに縮小した小型模型地盤に重力加速度のN倍の遠心加速度を与えることで、小型模型地盤に実物の応力状態を再現することが可能となる。
【0026】
また、他方のプラットホーム31bにはカウンターウエイト33が設置できるようになっており、高速回転する回転アーム21の重量バランスの均衡状態が維持できるようになっている。
【0027】
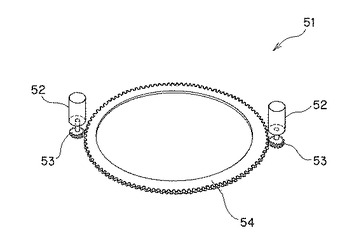
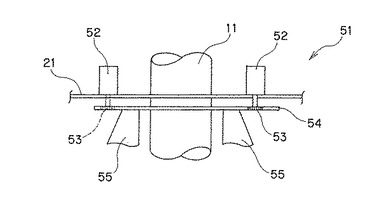
第1の実施形態に係る遠心模型実験装置は、以上説明したような概略構成を備えるものであるが、さらなる好適な特徴事項として、油圧発生機構51を備えている。この油圧発生機構51は、図1及び図2において例示するように、例えば回転アーム21の下方側に設置することが可能であり、この油圧発生機構51を用いることによって、高速回転する回転アーム21に対して簡易且つ安価な構成で大流量の作動油を供給し、所望の油圧供給を実現することができる。そこで、この油圧発生機構51の具体的な構成について、図3及び図4を用いて説明を行う。ここで、図3は、第1の実施形態に係る油圧発生機構の構成部材と作動原理を説明するための概念図であり、また、図4は、第1の実施形態に係る遠心模型実験装置に対する油圧発生機構の設置方法を例示する図である。
【0028】
図3及び図4においてより詳細に示すように、第1の実施形態に係る油圧発生機構51は、油圧を発生するためのオイルポンプ52と、このオイルポンプ52に設置されるピニオンギア53と、ピニオンギア53と噛合する円環状のラックギア54と、によって構成されている。
【0029】
オイルポンプ52は、高速回転する回転アーム21に設置され、回転アーム21の回転運動にともなって中心軸11の軸心を回転中心としてその周りを周回するように構成されている。また、オイルポンプ52にはピニオンギア53が回転自在な状態で設置されており、このピニオンギア53の回転運動にともなってオイルポンプ52が作動し、圧を持った作動油の流れが作られることになる。
【0030】
一方、円環状のラックギア54は、不動状態となるように固定設置される部材であり、例えば、中心軸11の下方の軸端を軸支する軸受箱等の安定したベース部分55に固定設置されることが好適である。また、ラックギア54は、その円環状の円中心と中心軸11の軸心とが合致するような位置関係で設置されている。このような構成を有することによって、回転アーム21が回転運動したとき、オイルポンプ52に接続されるピニオンギア53は、ラックギア54上を自転しながら公転することになる。すなわち、回転アーム21が回転運動すると、ピニオンギア53はラックギア54上を回転してオイルポンプ52を駆動させることになるので、油圧発生機構51は、回転アーム21の回転運動を利用するという非常に効率的な方式によって所望の油圧供給を実現することが可能となっている。
【0031】
なお、第1の実施形態に係る遠心模型実験装置では、合成加速度が略水平方向に働くことによってプラットホーム31が振り上がったときに、このプラットホーム31を回転アーム21に対して固定保持するための固定手段22を備えている。この固定手段22には、例えば油圧によって駆動し、プラットホーム31を回転中心方向に向かって押しつける押圧機構や、プラットホーム31を機械的に掴むチャック機構等を採用することが好適である。そして、この油圧駆動される固定手段22に対しては、上述したオイルポンプ52によって供給される作動油を用いることが好適である。このような機構の採用は、高速回転する回転アーム21に対して大流量の作動油を供給することができる油圧発生機構51の採用によって初めて実現可能となったものであり、プラットホーム31という大きな遠心加速度が加わる重量物を固定保持することは、ロータリージョイントを用いた従来の油圧供給機構では、非常に困難なことであったのである。
【0032】
以上、第1の実施形態に係る遠心模型実験装置の具体的な構成について説明した。次に、第1の実施形態に係る遠心模型実験装置を用いた小型模型地盤の観測方法について説明を行う。
【0033】
第1の実施形態に係る遠心模型実験装置は、図1及び図2において示すように、回転アーム21の回転半径とほぼ同じか僅かに大きい円柱形状の空間内に設置されており、この円柱形状の空間の側壁には、外部から観察するための図示しない小窓が設けられている。回転する試料容器32のマクロ的な挙動は、この小窓からカメラを用いて撮影することによって観察することができる。
【0034】
回転数が大きい場合には、カメラを回転アーム21に載置して、カメラと小型模型地盤を同時に回転させて撮影することも可能である。ただし、回転数が大きい場合にはカメラにも遠心力が働くので、遠心力が小さくて済む小型カメラを設置することが好適である。
【0035】
一方、小型模型のミクロ的な挙動を測定するためには、ひずみゲージ等のセンサを用いればよい。この場合は、小型模型に電流を流したとき、小型模型にひずみが生じると電気抵抗が変化し、それにともなって電圧が変化することになる。このときの電圧の変化を調べることによって、ひずみ、すなわち小型模型内の変形を間接的に測定することができる。したがって、第1の実施形態に係る遠心模型実験装置によれば、小型模型に生じる挙動を安定して観察することができるので、精度よく現場の挙動を把握することが可能である。
【0036】
(第2の実施形態)
上述した第1の実施形態では、土質工学や地盤工学等の分野の模型実験で用いられている一般的な遠心模型実験装置を改良したものについて説明した。次に説明する第2の実施形態では、プラットホームが略水平方向に振り上がったときに模型水路部が完成し、この模型水路部を用いて地震に起因する津波の影響等を模擬的に観察することができる地震津波実験装置として構成される遠心模型実験装置について説明を行う。なお、第1の実施形態で説明した部材と同一又は類似する部材については、同一符号を付して説明を省略する場合がある。
【0037】
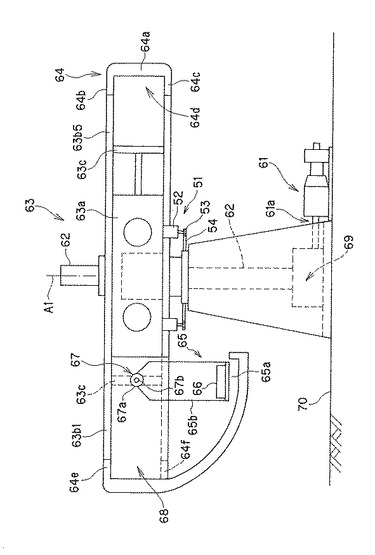
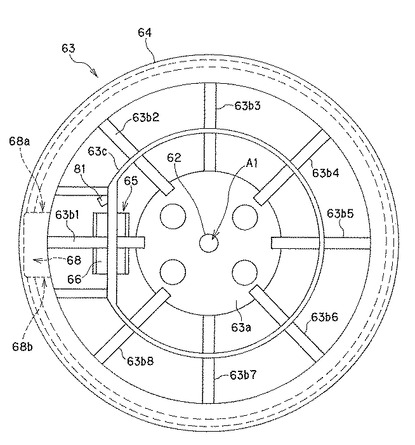
ここで、図5は、第2の実施形態に係る遠心模型実験装置の回転前の状態を示す正面図であり、また、図6は、第2の実施形態に係る遠心模型実験装置の回転前の状態を示す上面図である。
【0038】
図5及び図6に示されるように、第2の実施形態に係る遠心模型実験装置は、固定床70上に設置されており、モータ61と、中心軸62と、回転アーム63と、模型水路部64と、プラットホーム65と、模擬陸域部66とを備えている。
【0039】
モータ61には、図示しない電源が接続されており、モータ軸61aを回転駆動することができるようになっている。モータ軸61aは、減速機69に接続しており、中心軸62を回転中心線A1周りに回転させる。なお、回転中心線A1は、図5における鉛直方向の仮想直線である。
【0040】
中心軸62には、回転アーム63が取り付けられている。回転アーム63は、中心軸62により回転駆動される。回転アーム63の中央部には、略円盤形状をして中心軸62に取り付けられる中央支持部63aが設置されている。中央支持部63aの外周部からは、外側に向けて放射状に突出するように放射腕部63b1〜63b8が取り付けられている。なお、放射腕部の個数については、図6においては8個であるが、個数は限定されるものではなく、何個であってもよい。また、隣接する放射腕部同士を連結するようにして、略環状の支持リング部63cが設けられている。
【0041】
回転アーム63の外周部には、模型水路部64が取り付けられている。模型水路部64は、全体として略円環状に形成されている。また、模型水路部64の円対称中心線と、中心軸62の回転中心線A1は、一致するように設置されている。
【0042】
模型水路部64は、底板部64aと、一対の側板部64b,64cを有して構成されている。このような構成によって、底板部64aが下底部となるように見ると、断面形状が略樋状を成しており、内部に凹部64dが形成されている。
【0043】
なお、プラットホーム65に対応する箇所の模型水路部64においては、模型水路部64の上側の側板部64eの部分は側板部64bと同様に設けられているが、模型水路部64の下側の側板部64fの部分は、図示しない駆動機構によりスライド移動等により開閉可能な構成となっており、地震津波実験装置として構成される第2の実施形態に係る遠心模型実験装置の回転前の状態では、例えば図5における紙面手前側又は紙面奥側へスライド移動により引き込まれており、開口が形成され、その箇所の模型水路部の凹部は、陸域部収納空間68となっている。
【0044】
また、プラットホーム65は、板状の台板部65aの例えば左右両側、又は四隅を吊下部材65bによって吊り下げ支持し、吊下部材65bの上端が、回動ヒンジ部67によって回転アーム63、例えば支持リング部63cなどに、回動可能な状態で取り付けられている。回動ヒンジ部67は、例えば支持リング部63cの側に、円柱状の部材67bが固定され、部材67bに嵌合して回動可能となるように円筒状部材67aが取り付けられるなどして構成され、円筒状部材67aに吊下部材65bの上端が固定されるなどして構成される。なお、回動ヒンジ部67の構成は、上記と逆(回動する部分が中央の円柱部となる構成)であってもよい。
【0045】
このような構成により、プラットホーム65は、回動ヒンジ部67の回動中心線(図5における回動ヒンジ部67の中心点を通り、図5の紙面手前から紙面奥へ向かって延びる仮想直線)の周りに回動可能となっている。
【0046】
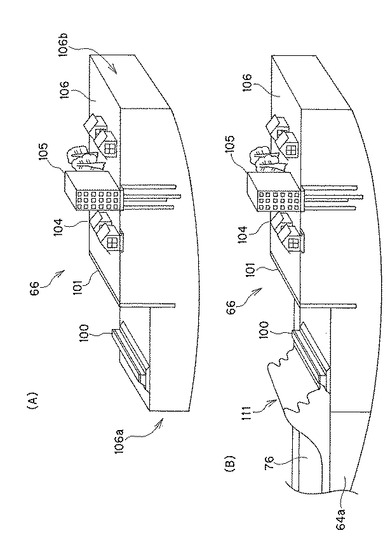
また、プラットホーム65の台板部65aの上には、模擬陸域部66が設置されている。模擬陸域部66は、例えば、図10中の(A)のような構成を有している。すなわち、土又は砂若しくはこれらの混合物が収容されて構成される模擬地盤部106を有し、模擬地盤部106の上に、防波堤模型100、岸壁模型101、家屋模型104、ビルディング模型105、あるいはこれらの適宜の組み合わせから成る構造物模型が配置されている。
【0047】
以上のような構成を有する第2の実施形態に係る遠心模型実験装置に対しても、第1の実施形態で説明したようなオイルポンプ52と、ピニオンギア53と、ラックギア54とから構成される油圧発生機構51を設けることが好適である。詳細な構成や作動原理については、図3及び図4等を用いて説明した第1の実施形態の場合と同様であるので再度の説明は省略するが、第2の実施形態に係る遠心模型実験装置においても、例えば図5において例示するように、回転アーム63の下方の位置に油圧発生機構51を設けることにより、非常に効率よく回転アーム63上の機器に対する所望の油圧供給を実現することが可能となる。
【0048】
なお、第2の実施形態に係る遠心模型実験装置は地震津波実験装置として機能するので、模擬水路部64には後に詳述する造波装置が設けられることになる。そして、この造波装置についてもその動力源として油圧を用いることができるので、油圧発生機構51が効果的な油圧供給源としての機能を発揮することになる。特に、油圧発生機構51によれば、大流量の作動油を供給することができるので、例えばこれを造波装置に用いることによって、従来では不可能であった実験条件を実現することができ、試験装置としての能力の向上を図ることが可能となる。
【0049】
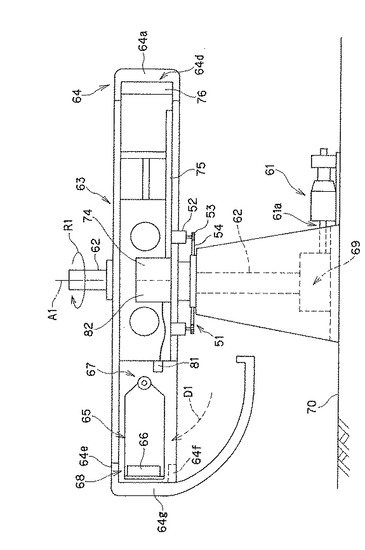
次に、第2の実施形態に係る遠心模型実験装置を用いて行う地震津波実験について説明する。
【0050】
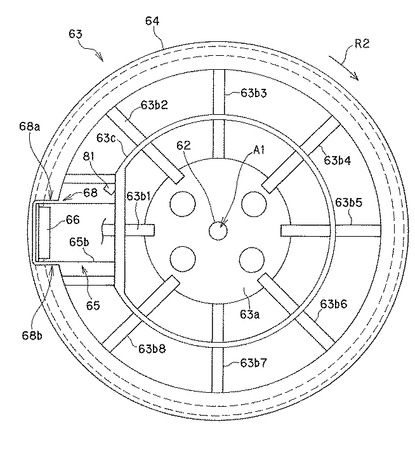
まず、モータ61に電力を供給し、回転駆動させる。これにより、中心軸62が、例えば図7における回転中心線A1の周りにR1の方向に回転する。この回転により、中心軸62は、図8においてはR2の方向に回転する。この中心軸62の運動にともない、回転アーム63及び模型水路部64も、中心軸62と同じ回転方向に回転する。
【0051】
この回転により、模型水路部64には、水平方向の遠心加速度が作用する。すなわち、図7においては、図7の紙面右端の模型水路部64には、図7における紙面左側から紙面右側に向かう方向の遠心加速度が作用し、図7の紙面左端の模型水路部64には、図7における紙面右側から紙面左側に向かう方向の遠心加速度が作用する。
【0052】
したがって、図7における紙面右端の模型水路部64において、底板部64aが下底部となるように見ると、模型水路部64に作用する遠心加速度(図7の紙面右端における紙面左側から紙面右側に向かう方向の遠心加速度)は、模型水路部64の底板部64aの上から下に向かう重力加速度に相当していることになる。また、底板部64gが下底部となるように見ると、模型水路部64に作用する遠心加速度(図7の紙面左端における紙面右側から紙面左側に向かう方向の遠心加速度)は、模型水路部64の底板部64gの上から下に向かう重力加速度に相当していることになる。
【0053】
また、回転アーム63の回転にともなう遠心力により、プラットホーム65は、回動ヒンジ部67を回動中心として図7におけるD1の方向に回動する。これにより、台板部65a上の模擬陸域部66もともに回動し、プラットホーム65の全体が略水平状態になったときに、台板部65aと模擬陸域部66は、陸域部収容空間68の中に収容される。この場合には、例えば、陸域部収容空間68の一方の端部68aの側に、模擬地盤部106(図10参照)の一方の端部106aが対向し、陸域部収容空間68の他方の端部68bの側に、模擬地盤部106の他方の端部106bが対向するような状態となる。
【0054】
この際、模型水路部64の下側の側板部64fの部分は、図示しない駆動機構によりスライド移動等により開閉可能な構成となっており、遠心模型実験装置の回転が行われ、模擬陸域部66が陸域部収容空間68の中に収容された後の状態では、例えば図7における紙面手前側又は奥側へスライド移動により移動して開口が閉塞される。
【0055】
また、例えば回転アーム63の内部には、給水装置74と給水管75が設けられている。給水装置74には、図示しない水を収容するタンクと、ポンプが内蔵されている。給水管75は、一端がポンプに接続されるとともに、他端が模型水路部64の凹部64aの付近に位置するように設置されている。このような構成により、遠心模型実験装置が回転し、所定の回転速度に達した後には、給水装置74と給水管75により、模型水路部64の略樋状の凹部64aに、水が供給される。
【0056】
この場合、模型水路部64には、上述したような遠心加速度が作用していることから、凹部64aに供給された水は、図7において符号76で示すように、凹部64aに密着する。これにより、遠心模型実験装置が所定速度で回転しているときには、図7の紙面右端の模型水路部64においては、底板部64aが下底部となり、その上に水76が存在し、あたかも水平遠心加速度が重力加速度に相当するような状態が形成される。この水76は、模型水路部64の凹部64aのうち、上記した模型陸域部66以外の部分に溜まることとなる。
【0057】
また、例えば模型水路部64には、造波装置が設けられており、遠心模型実験装置が回転して所定の回転速度に達した後に、地震による津波を模擬する波を、上記の模擬水域部の水76に発生させることができるようになっている。
【0058】
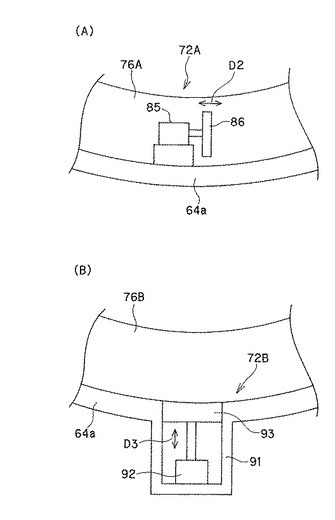
図9中の(A)は、造波装置の一構成例を示す図である。図9中の(A)で示される造波装置の場合、造波装置72Aは、駆動機構85と、移動板86を有している。駆動機構85としては、直線状の往復運動を行う機構、例えばシリンダとピストンを有し、油圧や空気圧等で直線状の往復運動を行う機構、回転駆動源とクランクとスライダを有する「スライダ・クランク機構」その他の公知の機構を使用することが可能である。
【0059】
このような構成により、移動板86は、図9中(A)の方向D2に移動可能となっている。これにより、造波装置72Aは、模擬水域部76Aの円の接線方向に水を複数回押圧し、地震津波を模擬した波を発生させることができる。
【0060】
また、別形態の造波装置として、図9中(B)に示すような構成のものを使用することも可能である。図9中(B)に示す造波装置72Bは、模型水路部64aに設けられた収納ボックス91と、駆動機構92と、移動板93を有している。駆動機構92としては、直線状の往復運動を行う機構、例えばシリンダとピストンを有し、油圧や空気圧等で直線状の往復運動を行う機構、回転駆動源とクランクとスライダを有する「スライダ・クランク機構」その他の公知の機構を使用することが可能である。
【0061】
このような構成により、移動板93は、図9中(B)の方向D3に移動可能となっている。これにより、造波装置72Bは、模擬水域部76Bの水底付近の陥没を模擬することにより、地震津波を模擬した波を発生させることができる。
【0062】
上記のようにして、地震による津波を模擬した波を、模擬水域部76A,76Bに発生させる。図10中(B)に示すように、この模擬津波111は、模擬陸域部66に到達し、模擬陸域部66に設けられた構造物模型、例えば、防波堤模型100、岸壁模型101、家屋模型104、ビルディング模型105、模擬地盤部106などに、模擬津波111による種々の作用を及ぼす。
【0063】
なお、図6及び図7に示すように、第2の実施形態に係る遠心模型実験装置には、ビデオカメラ81と、計測・記録部82が設けられている。計測・記録部82には、図示しない画像記録装置などが内蔵されている。このような構成によって、模擬津波111が襲来したときの模擬陸域部66の被害状況を観察することができ、また、画像情報として記録し、その後に解析を行うこともできる。
【0064】
また、図10に示す模擬陸域部66の構造物模型などには、ひずみゲージなどの種々の検出器類を設置しておくことが可能であり、模擬津波111が構造物模型に与える衝撃力などを検出することが可能である。
【0065】
上述した第2の実施形態に係る遠心模型実験装置は、模型水路部64が円環状に連続した構成となっている。したがって、発生する模擬津波111は、実際の津波をより忠実に再現した波となっている。このため、構造物模型に与える影響等についても、より実際の状況に近いものとなっており、地震津波が来襲した際の地盤や構造物の挙動をより詳細に解明することができる。
【0066】
以上、本発明の好適な実施形態について説明したが、本発明の技術的範囲は上記各実施形態に記載の範囲には限定されない。上記各実施形態には、多様な変更又は改良を加えることが可能である。
【0067】
例えば、第2の実施形態に係る遠心模型実験装置において、模型水路部64については、プラットホーム65が略水平方向に振り上げられ、模擬陸域部66が模型水路部64中にセットされて初めて実験可能となるが、この模型水路部64とプラットホーム65とは、遠心加速度を受ける状態において確実に連結され、しかも実験終了後には、確実に連結を解除する構成が求められる。
【0068】
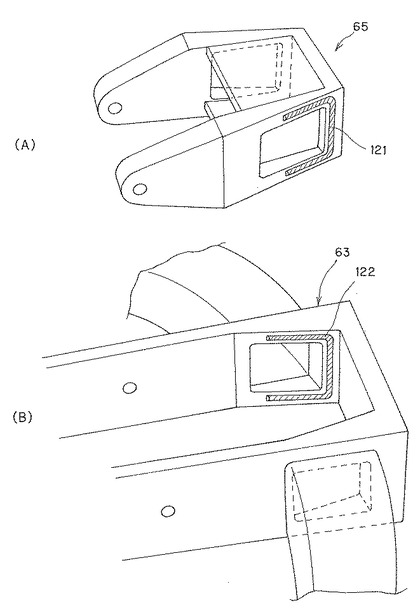
そこで、図11中の(A)において示すように、プラットホーム65の先端形状を先細の楔形状となるように角度を付けた傾斜面とし、しかもその傾斜面上に水を確実にシールする目的でパッキン121を設置する構成を採用する。一方、プラットホーム65の全体が略水平状態になったときに上記傾斜面と対向する回転アーム63側の面についても、パッキン122を設置しておく。そして、プラットホーム65の全体が略水平状態になったとき、図示しない油圧シリンダ等の押圧機構を用いることによってプラットホーム65を外周方向に押し出し、パッキン121,122同士のしっかりとした押し合いと、プラットホーム65の楔形状の効果とによって、水の確実なシールが実現する。
【0069】
実験は、上述したシール状態が成ったときに水を注入して行われ、また、実験終了後には、パッキン121,122同士の押し合いに用いた押圧機構を逆に作動させてパッキン121,122同士を引き離し、遠心模型実験装置の回転数を下げることによってプラットホーム65の傾動角度を下げ、最終的に遠心模型実験装置を停止させればよい。
【0070】
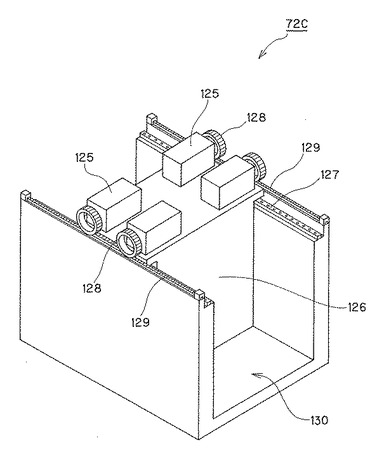
また、第2の実施形態に係る遠心模型実験装置では、図9を用いて造波装置に適用可能な種々の構成例を説明した。しかし、本発明の適用範囲は、上述したものには限られない。例えば、図12において示すような造波装置を適用することも可能である。すなわち、図12において例示する造波装置72Cは、水路130の上部にリニアガイドレール127とラック129を並列に配置する一方、この水路130に設置される造波板126には、リニアガイドレール127上を往復直線運動自在とされる図示しないガイドブロックと、ラック129に噛み合う歯車128を設置する構成とした。なお、造波板126に対するガイドブロック(不図示)の取り付けは、ボルト等の締結手段により行われており、歯車128の取り付けについては、造波板126上に設置されるオイルモータ125を介して行われている。
【0071】
したがって、図12において例示する造波装置72Cは、リニアガイドレール127とガイドブロック(不図示)とによって構成されるリニアガイド装置によって造波の際のモーメント反力を受け、ラック129とそれに噛合する歯車128とによって確実な駆動力の伝達が行われることになる。このような構成の造波装置72Cは、大きな遠心加速度を受けながらも正常に動作する必要のある造波装置にとって好適な構成であり、造波装置72Cの自重と水から受けることになる反力を水路130の上部でしっかり受けることができ、しかもスムーズな動作を実現可能としている。
【0072】
なお、図12において例示する造波装置72Cの駆動源となるオイルモータ125に関しても、上述した油圧発生機構51を用いて作動油を供給することが好適であり、大きな抵抗を受ける造波板126を駆動させて波を発生させるに十分な油圧を供給することができる。
【0073】
また、上述した第1及び第2の実施形態に係る遠心模型実験装置では、動力発生手段が、オイルポンプ52、ピニオンギア53及びラックギア54から成る油圧発生機構51として構成される場合を例示して説明を行ったが、本発明に係る動力発生手段の適用範囲は上述した油圧発生機構51に限られるものではない。
【0074】
例えば、上記オイルポンプ52を発電機に取り換えることによって、回転アーム21,63の回転運動から得られる回転動力をこの発電機を利用して電力に変換し、回転アーム21,63で利用することができる。また、上記オイルポンプ52を圧縮空気発生ポンプに取り換えることによって、回転アーム21,63の回転運動から得られる回転動力をこの圧縮空気発生ポンプを利用して圧縮空気に変換し、回転アーム21,63で利用することができる。なお、これらオイルポンプ52、発電機、圧縮空気発生ポンプについては、これらを単独で、あるいは組み合わせて用いることも可能である。そして、以上の様な変更又は改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。
【図面の簡単な説明】
【0075】
【図1】第1の実施形態に係る遠心模型実験装置の概略構成を例示する正面図であり、特に回転アームが回転していない状態を示している。
【図2】第1の実施形態に係る遠心模型実験装置の概略構成を例示する正面図であり、特に回転アームが高速回転することによってプラットホームが略水平方向に振り上がっている状態を示している。
【図3】第1の実施形態に係る油圧発生機構の構成部材と作動原理を説明するための概念図である。
【図4】第1の実施形態に係る遠心模型実験装置に対する油圧発生機構の設置方法を例示する図である。
【図5】第2の実施形態に係る遠心模型実験装置の回転前の状態を示す正面図である。
【図6】第2の実施形態に係る遠心模型実験装置の回転前の状態を示す上面図である。
【図7】第2の実施形態に係る遠心模型実験装置の回転中の状態を示す正面図である。
【図8】第2の実施形態に係る遠心模型実験装置の回転中の状態を示す上面図である。
【図9】第2の実施形態に係る遠心模型実験装置に適用可能な造波装置の構成例を示す図である。
【図10】第2の実施形態に係る遠心模型実験装置に適用可能な模擬陸域部の構成例を示す図であり、また、第2の実施形態に係る遠心模型実験装置の作用を説明するための図である。
【図11】本発明に適用可能なプラットホームの別の構成例を示す図である。
【図12】本発明に適用可能な造波装置の別の構成例を示す図である。
【図13】従来の遠心模型実験装置の概略構成を示す図である。
【符号の説明】
【0076】
11 中心軸、12 スリップリング、21 回転アーム、22 固定手段、31 プラットホーム、31a 一方のプラットホーム、31b 他方のプラットホーム、32 試料容器、33 カウンターウエイト、41 モータ、42 減速器、51 油圧発生機構、52 オイルポンプ、53 ピニオンギア、54 ラックギア、55 ベース部分、61 モータ、61a モータ軸、62 中心軸、63 回転アーム、63a 中央支持部、63b1〜63b8 放射腕部、63c 支持リング部、64 模型水路部、64a 底板部、64b,64c 側板部、64d 凹部、64e 上側の側板部、64f 下側の側板部、64g 底板部、65 プラットホーム、65a 台板部、65b 吊下部材、66 模擬陸域部、67 回動ヒンジ部、67a 円筒状部材、67b 部材、68 陸域部収納空間、68a (陸域部収容空間の)一方の端部、68b (陸域部収容空間の)他方の端部、69 減速機、70 固定床、72A,72B,72C 造波装置、74 給水装置、75 給水管、76 水、76A,76B 模擬水域部、81 ビデオカメラ、82 計測・記録部、85 駆動機構、86 移動板、91 収納ボックス、92 駆動機構、93 移動板、100 防波堤模型、101 岸壁模型、104 家屋模型、105 ビルディング模型、106 模擬地盤部、106a (模擬地盤部の)一方の端部、106b (模擬地盤部の)他方の端部、111 模擬津波、121,122 パッキン、125 オイルモータ、126 造波板、127 リニアガイドレール、128 歯車、129 ラック、130 水路、201 回転アーム、202 試料容器。
【技術分野】
【0001】
本発明は、例えば、実物の1/Nに縮小した小型模型に重力加速度のN倍の遠心加速度を与えることで小型模型に実物の応力状態を再現し、このとき小型模型に生じる静的あるいは動的な挙動を観察することによって、精度よく現場の挙動を把握することができる遠心模型実験装置の改良に関するものである。
【背景技術】
【0002】
従来から、土質工学や地盤工学等の分野では、遠心模型実験装置を用いることによって、地盤の挙動を正確に予測しようとする試みが行われている。この遠心模型実験装置の概略構成は、図13に示すように、回転アーム201の両端に試料容器202を吊り下げて回転させるものであり、回転アーム201を高速(例えば、毎分20回転から150回転程度)で回転させることによって、地球の重力加速度と遠心加速度の合成加速度の方向に試料容器202が振り上がるようになっている。このとき、重力は遠心力よりも十分に小さいので、上記合成加速度はほぼ水平方向に働くことになり、回転アーム201が高速回転したときには、試料容器202の水平状態が維持されることとなる。そして、試料容器202の中に小型模型地盤を前もって作成しておけば、小型模型地盤の鉛直下向きに遠心力が作用することになり、実物の1/Nに縮小した小型模型地盤に重力加速度のN倍の遠心加速度を与えることで小型模型地盤に実物の応力状態を再現することができる。このときに小型模型地盤に生じる静的あるいは動的な挙動を観察することによって、精度よく現場の挙動を把握することが可能となる。
【0003】
上記のような遠心模型実験装置を用いた模型実験は、屋内で行うことができ、しかも現場での実験よりも安価で頻繁に行うことができるという利点を備えているので、例えば、支持力・安定問題、沈下問題、地震時挙動の解明などの多種多様な研究に用いられており、さらに近年では、波浪と構造物の相互作用、汚染物質の拡散問題、プレートテクトニクスなどの研究にも使用されている。
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところが、上述した従来の遠心模型実験装置は、高速回転する回転アーム201に対して、小型模型地盤中のミクロ的な挙動を測定する際に用いられるひずみゲージ等のセンサを動作させるための電力を供給したり、回転アーム201で消費される作動油を供給したり、さらにはセンサ等から得られたデータを外部に取り出して記録保持したりしなければならないという構造的な課題を有するものであった。
【0005】
そして従来、回転系の内と外の電力や情報のやりとりは、回転軸に取り付けてあるスリップリングを通して行われており、スリップリングは回転軸に取り付けられているリングの外側にブラシを接触させることによって結線し、回転系の内と外に電流や電気信号等を流す仕組みが採用されていた。
【0006】
しかしながら、外部から電力供給するためのスリップリングは高価であり、また、金属の滑動により電力を伝達する構造であるが故に、正常に動作させるための管理が大変であるという問題を有していた。さらに、スリップリングには、電流の流量の面での制約が存在していた。
【0007】
一方、回転アーム201で消費する油圧については、ロータリージョイントを介して外部から供給される方式が採用されていた。しかしながら、ロータリージョイントは、高圧の作動油を流す際に流量の面で制約があり、従来技術に係る遠心模型実験装置にあっては、外部の油圧源から回転アーム201に対する作動油の供給は、少量ずつしか行うことができないという問題があった。また、ロータリージョイントは、シール部を滑動させてシールする構造なので、維持管理が非常に面倒であるという問題点を有していた。
【0008】
このようなロータリージョイントの問題点を解消する方法として、従来技術では、回転アーム201にアキュムレータを用意し、このアキュムレータをチャージして瞬間的に大量の作動油を消費することが考えられるが、アキュムレータの設置は部品点数の増加によるコストアップを招くものであり、好ましくない。
【0009】
さらに別の対策として、回転アーム201に電動機とオイルポンプを設置し、回転系の内側だけで油圧の供給を実現することも考えられるが、この方式では電動機が遠心加速度に耐えられないという問題がある。
【0010】
本発明は、高速回転する回転アームで消費する動力を外部から供給することは非常に困難で制約をともなうものであるという上述した従来技術での課題の存在に鑑みて成されたものであって、その目的は、回転運動する回転アームの動力を利用することによって回転体で消費するための動力を得るという、まったく新しい遠心模型実験装置を提供することにある。
【課題を解決するための手段】
【0011】
本発明に係る遠心模型実験装置は、鉛直方向に立設されるとともに軸心を回転中心として回転駆動自在に設置される中心軸と、前記中心軸から水平方向且つ直線状に延びて形成されるとともに前記中心軸の回転駆動に従って回転運動する回転アームと、前記回転アームに傾動自在に設置され、前記回転アームが回転運動したときに重力加速度と遠心加速度の合成加速度の方向に振り上がるように構成されるプラットホームと、前記中心軸に対して回転駆動力を及ぼす回転駆動源と、を備える遠心模型実験装置であって、前記回転駆動源による前記中心軸の回転運動にともなって前記回転アームが回転運動したときに、この回転運動を利用して動力を発生させる動力発生手段を備えることを特徴とする。
【0012】
本発明に係る遠心模型実験装置において、前記動力発生手段が発生させる動力は、少なくとも油圧、電力又は圧縮空気であることとすることができる。
【0013】
本発明に係る他の遠心模型実験装置は、鉛直方向に立設されるとともに軸心を回転中心として回転駆動自在に設置される中心軸と、前記中心軸から水平方向且つ直線状に延びて形成されるとともに前記中心軸の回転駆動に従って回転運動する回転アームと、前記回転アームに傾動自在に設置され、前記回転アームが回転運動したときに重力加速度と遠心加速度の合成加速度の方向に振り上がるように構成されるプラットホームと、前記中心軸に対して回転駆動力を及ぼす回転駆動源と、を備える遠心模型実験装置であって、油圧を発生するオイルポンプと、前記オイルポンプに設置されるピニオンギアと、前記ピニオンギアと噛合する円環状のラックギアと、を備え、前記ラックギアの円環状の円中心と前記中心軸の軸心が合致するように構成されることにより、前記回転アームが回転運動したときに前記ピニオンギアが前記ラックギア上を回転して前記オイルポンプを駆動させることを特徴とする。
【0014】
本発明に係る他の遠心模型実験装置において、前記オイルポンプは前記回転アームに設置され、前記ラックギアは不動状態となるように設置されることにより、前記回転アームが回転運動したときに前記ピニオンギアが前記ラックギア上を自転しながら公転するように構成することが好適である。
【0015】
また、本発明に係る他の遠心模型実験装置は、前記合成加速度が略水平方向に働くことによって前記プラットホームが振り上がったときに、該プラットホームを前記回転アームに対して固定保持する固定手段を備え、前記固定手段は、前記オイルポンプによって発生する油圧を用いて駆動されることとすることができる。
【発明の効果】
【0016】
本発明によれば、高速回転する回転アームに対して簡易且つ安価な構成で内部消費動力を供給することが可能な、従来にない新たな遠心模型実験装置を提供することが可能である。この動力は、回転アームの回転運動を利用して得られるものであるために非常に効率が良い。また、得られる動力の種類は、油圧、電力、圧縮空気の少なくとも一つとすることができ、特に、油圧については、従来技術では実現困難であった大流量の作動油を供給することができるので、回転体である回転アームに対して所望の油圧供給を実現することが可能である。
【発明を実施するための最良の形態】
【0017】
以下、本発明を実施するための好適な実施形態について、図面を用いて説明する。なお、以下の各実施形態は、各請求項に係る発明を限定するものではなく、また、各実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【0018】
なお、以下で説明する各実施形態では、回転駆動源としてのモータによる中心軸の回転運動にともなって回転アームが回転運動したときに、この回転運動を利用して動力を発生させる動力発生手段が、オイルポンプ、ピニオンギア及びラックギアから成る油圧発生機構として構成される場合を例示して説明を行う。
【0019】
(第1の実施形態)
図1は、第1の実施形態に係る遠心模型実験装置の概略構成を例示する正面図であり、特に回転アームが回転していない状態を示している。一方、図2は、第1の実施形態に係る遠心模型実験装置の概略構成を例示する正面図であり、特に回転アームが高速回転することによってプラットホームが略水平方向に振り上がっている状態を示している。
【0020】
図1及び図2に示されるように、第1の実施形態に係る遠心模型実験装置は、その主要な構成部材として、中心軸11と回転アーム21、及び回転アーム21に傾動自在に設置されるプラットホーム31と中心軸11に対して回転駆動力を及ぼす回転駆動源としてのモータ41とを備えている。
【0021】
中心軸11は、鉛直方向に立設されるとともに軸心を回転中心として回転駆動自在に設置される部材であり、その回転駆動力は、減速器42を介して接続されるモータ41によって付与される。中心軸11の上方及び下方の軸端は、多数の軸受によって軸支されており、これらの軸受によって安定且つ確実な中心軸11の回転運動が実現されている。
【0022】
また、中心軸11の上方の軸端には、スリップリング12が設置されている。このスリップリング12は、回転体である回転アーム21に取り付けられたセンサやデバイスとの通信や、高速回転している回転アーム21への電力供給などを可能にする部材であり、中心軸11に取り付けてあるリングの外側にブラシを接触させることによって結線し、回転アーム21等の回転系の内と外の電気信号や電流等のやりとりを行うことができるようになっている。
【0023】
回転アーム21は、中心軸11から水平方向且つ直線状に延びて形成される部材であり、中心軸11の回転駆動に従って回転運動することができるようになっている。この回転運動は、非常に高速で行われるので、回転アーム21は大きな遠心力を十分に受容できるような剛性を備える構造体として構成されている。
【0024】
また、回転アーム21は、その両側に傾動自在に設置される一対のプラットホーム31a,31bを備えている。これらプラットホーム31a,31bは、回転アーム21が回転運動したときに重力加速度と遠心加速度の合成加速度の方向に振り上がるように構成される部材である。なお、重力は遠心力よりも十分に小さいので、上記合成加速度は略水平方向に働くことになる。したがって、回転アーム21が高速回転したときには、一対のプラットホーム31a,31bはいずれも図2において示すような水平状態を維持するように振り上がることとなる。
【0025】
そして、一方のプラットホーム31aには試料容器32が設置できるようになっており、このプラットホーム31aの水平状態が維持されることによって、試料容器32の中に形成される小型模型地盤の鉛直下向きに遠心力が作用することになり、例えば実物の1/Nに縮小した小型模型地盤に重力加速度のN倍の遠心加速度を与えることで、小型模型地盤に実物の応力状態を再現することが可能となる。
【0026】
また、他方のプラットホーム31bにはカウンターウエイト33が設置できるようになっており、高速回転する回転アーム21の重量バランスの均衡状態が維持できるようになっている。
【0027】
第1の実施形態に係る遠心模型実験装置は、以上説明したような概略構成を備えるものであるが、さらなる好適な特徴事項として、油圧発生機構51を備えている。この油圧発生機構51は、図1及び図2において例示するように、例えば回転アーム21の下方側に設置することが可能であり、この油圧発生機構51を用いることによって、高速回転する回転アーム21に対して簡易且つ安価な構成で大流量の作動油を供給し、所望の油圧供給を実現することができる。そこで、この油圧発生機構51の具体的な構成について、図3及び図4を用いて説明を行う。ここで、図3は、第1の実施形態に係る油圧発生機構の構成部材と作動原理を説明するための概念図であり、また、図4は、第1の実施形態に係る遠心模型実験装置に対する油圧発生機構の設置方法を例示する図である。
【0028】
図3及び図4においてより詳細に示すように、第1の実施形態に係る油圧発生機構51は、油圧を発生するためのオイルポンプ52と、このオイルポンプ52に設置されるピニオンギア53と、ピニオンギア53と噛合する円環状のラックギア54と、によって構成されている。
【0029】
オイルポンプ52は、高速回転する回転アーム21に設置され、回転アーム21の回転運動にともなって中心軸11の軸心を回転中心としてその周りを周回するように構成されている。また、オイルポンプ52にはピニオンギア53が回転自在な状態で設置されており、このピニオンギア53の回転運動にともなってオイルポンプ52が作動し、圧を持った作動油の流れが作られることになる。
【0030】
一方、円環状のラックギア54は、不動状態となるように固定設置される部材であり、例えば、中心軸11の下方の軸端を軸支する軸受箱等の安定したベース部分55に固定設置されることが好適である。また、ラックギア54は、その円環状の円中心と中心軸11の軸心とが合致するような位置関係で設置されている。このような構成を有することによって、回転アーム21が回転運動したとき、オイルポンプ52に接続されるピニオンギア53は、ラックギア54上を自転しながら公転することになる。すなわち、回転アーム21が回転運動すると、ピニオンギア53はラックギア54上を回転してオイルポンプ52を駆動させることになるので、油圧発生機構51は、回転アーム21の回転運動を利用するという非常に効率的な方式によって所望の油圧供給を実現することが可能となっている。
【0031】
なお、第1の実施形態に係る遠心模型実験装置では、合成加速度が略水平方向に働くことによってプラットホーム31が振り上がったときに、このプラットホーム31を回転アーム21に対して固定保持するための固定手段22を備えている。この固定手段22には、例えば油圧によって駆動し、プラットホーム31を回転中心方向に向かって押しつける押圧機構や、プラットホーム31を機械的に掴むチャック機構等を採用することが好適である。そして、この油圧駆動される固定手段22に対しては、上述したオイルポンプ52によって供給される作動油を用いることが好適である。このような機構の採用は、高速回転する回転アーム21に対して大流量の作動油を供給することができる油圧発生機構51の採用によって初めて実現可能となったものであり、プラットホーム31という大きな遠心加速度が加わる重量物を固定保持することは、ロータリージョイントを用いた従来の油圧供給機構では、非常に困難なことであったのである。
【0032】
以上、第1の実施形態に係る遠心模型実験装置の具体的な構成について説明した。次に、第1の実施形態に係る遠心模型実験装置を用いた小型模型地盤の観測方法について説明を行う。
【0033】
第1の実施形態に係る遠心模型実験装置は、図1及び図2において示すように、回転アーム21の回転半径とほぼ同じか僅かに大きい円柱形状の空間内に設置されており、この円柱形状の空間の側壁には、外部から観察するための図示しない小窓が設けられている。回転する試料容器32のマクロ的な挙動は、この小窓からカメラを用いて撮影することによって観察することができる。
【0034】
回転数が大きい場合には、カメラを回転アーム21に載置して、カメラと小型模型地盤を同時に回転させて撮影することも可能である。ただし、回転数が大きい場合にはカメラにも遠心力が働くので、遠心力が小さくて済む小型カメラを設置することが好適である。
【0035】
一方、小型模型のミクロ的な挙動を測定するためには、ひずみゲージ等のセンサを用いればよい。この場合は、小型模型に電流を流したとき、小型模型にひずみが生じると電気抵抗が変化し、それにともなって電圧が変化することになる。このときの電圧の変化を調べることによって、ひずみ、すなわち小型模型内の変形を間接的に測定することができる。したがって、第1の実施形態に係る遠心模型実験装置によれば、小型模型に生じる挙動を安定して観察することができるので、精度よく現場の挙動を把握することが可能である。
【0036】
(第2の実施形態)
上述した第1の実施形態では、土質工学や地盤工学等の分野の模型実験で用いられている一般的な遠心模型実験装置を改良したものについて説明した。次に説明する第2の実施形態では、プラットホームが略水平方向に振り上がったときに模型水路部が完成し、この模型水路部を用いて地震に起因する津波の影響等を模擬的に観察することができる地震津波実験装置として構成される遠心模型実験装置について説明を行う。なお、第1の実施形態で説明した部材と同一又は類似する部材については、同一符号を付して説明を省略する場合がある。
【0037】
ここで、図5は、第2の実施形態に係る遠心模型実験装置の回転前の状態を示す正面図であり、また、図6は、第2の実施形態に係る遠心模型実験装置の回転前の状態を示す上面図である。
【0038】
図5及び図6に示されるように、第2の実施形態に係る遠心模型実験装置は、固定床70上に設置されており、モータ61と、中心軸62と、回転アーム63と、模型水路部64と、プラットホーム65と、模擬陸域部66とを備えている。
【0039】
モータ61には、図示しない電源が接続されており、モータ軸61aを回転駆動することができるようになっている。モータ軸61aは、減速機69に接続しており、中心軸62を回転中心線A1周りに回転させる。なお、回転中心線A1は、図5における鉛直方向の仮想直線である。
【0040】
中心軸62には、回転アーム63が取り付けられている。回転アーム63は、中心軸62により回転駆動される。回転アーム63の中央部には、略円盤形状をして中心軸62に取り付けられる中央支持部63aが設置されている。中央支持部63aの外周部からは、外側に向けて放射状に突出するように放射腕部63b1〜63b8が取り付けられている。なお、放射腕部の個数については、図6においては8個であるが、個数は限定されるものではなく、何個であってもよい。また、隣接する放射腕部同士を連結するようにして、略環状の支持リング部63cが設けられている。
【0041】
回転アーム63の外周部には、模型水路部64が取り付けられている。模型水路部64は、全体として略円環状に形成されている。また、模型水路部64の円対称中心線と、中心軸62の回転中心線A1は、一致するように設置されている。
【0042】
模型水路部64は、底板部64aと、一対の側板部64b,64cを有して構成されている。このような構成によって、底板部64aが下底部となるように見ると、断面形状が略樋状を成しており、内部に凹部64dが形成されている。
【0043】
なお、プラットホーム65に対応する箇所の模型水路部64においては、模型水路部64の上側の側板部64eの部分は側板部64bと同様に設けられているが、模型水路部64の下側の側板部64fの部分は、図示しない駆動機構によりスライド移動等により開閉可能な構成となっており、地震津波実験装置として構成される第2の実施形態に係る遠心模型実験装置の回転前の状態では、例えば図5における紙面手前側又は紙面奥側へスライド移動により引き込まれており、開口が形成され、その箇所の模型水路部の凹部は、陸域部収納空間68となっている。
【0044】
また、プラットホーム65は、板状の台板部65aの例えば左右両側、又は四隅を吊下部材65bによって吊り下げ支持し、吊下部材65bの上端が、回動ヒンジ部67によって回転アーム63、例えば支持リング部63cなどに、回動可能な状態で取り付けられている。回動ヒンジ部67は、例えば支持リング部63cの側に、円柱状の部材67bが固定され、部材67bに嵌合して回動可能となるように円筒状部材67aが取り付けられるなどして構成され、円筒状部材67aに吊下部材65bの上端が固定されるなどして構成される。なお、回動ヒンジ部67の構成は、上記と逆(回動する部分が中央の円柱部となる構成)であってもよい。
【0045】
このような構成により、プラットホーム65は、回動ヒンジ部67の回動中心線(図5における回動ヒンジ部67の中心点を通り、図5の紙面手前から紙面奥へ向かって延びる仮想直線)の周りに回動可能となっている。
【0046】
また、プラットホーム65の台板部65aの上には、模擬陸域部66が設置されている。模擬陸域部66は、例えば、図10中の(A)のような構成を有している。すなわち、土又は砂若しくはこれらの混合物が収容されて構成される模擬地盤部106を有し、模擬地盤部106の上に、防波堤模型100、岸壁模型101、家屋模型104、ビルディング模型105、あるいはこれらの適宜の組み合わせから成る構造物模型が配置されている。
【0047】
以上のような構成を有する第2の実施形態に係る遠心模型実験装置に対しても、第1の実施形態で説明したようなオイルポンプ52と、ピニオンギア53と、ラックギア54とから構成される油圧発生機構51を設けることが好適である。詳細な構成や作動原理については、図3及び図4等を用いて説明した第1の実施形態の場合と同様であるので再度の説明は省略するが、第2の実施形態に係る遠心模型実験装置においても、例えば図5において例示するように、回転アーム63の下方の位置に油圧発生機構51を設けることにより、非常に効率よく回転アーム63上の機器に対する所望の油圧供給を実現することが可能となる。
【0048】
なお、第2の実施形態に係る遠心模型実験装置は地震津波実験装置として機能するので、模擬水路部64には後に詳述する造波装置が設けられることになる。そして、この造波装置についてもその動力源として油圧を用いることができるので、油圧発生機構51が効果的な油圧供給源としての機能を発揮することになる。特に、油圧発生機構51によれば、大流量の作動油を供給することができるので、例えばこれを造波装置に用いることによって、従来では不可能であった実験条件を実現することができ、試験装置としての能力の向上を図ることが可能となる。
【0049】
次に、第2の実施形態に係る遠心模型実験装置を用いて行う地震津波実験について説明する。
【0050】
まず、モータ61に電力を供給し、回転駆動させる。これにより、中心軸62が、例えば図7における回転中心線A1の周りにR1の方向に回転する。この回転により、中心軸62は、図8においてはR2の方向に回転する。この中心軸62の運動にともない、回転アーム63及び模型水路部64も、中心軸62と同じ回転方向に回転する。
【0051】
この回転により、模型水路部64には、水平方向の遠心加速度が作用する。すなわち、図7においては、図7の紙面右端の模型水路部64には、図7における紙面左側から紙面右側に向かう方向の遠心加速度が作用し、図7の紙面左端の模型水路部64には、図7における紙面右側から紙面左側に向かう方向の遠心加速度が作用する。
【0052】
したがって、図7における紙面右端の模型水路部64において、底板部64aが下底部となるように見ると、模型水路部64に作用する遠心加速度(図7の紙面右端における紙面左側から紙面右側に向かう方向の遠心加速度)は、模型水路部64の底板部64aの上から下に向かう重力加速度に相当していることになる。また、底板部64gが下底部となるように見ると、模型水路部64に作用する遠心加速度(図7の紙面左端における紙面右側から紙面左側に向かう方向の遠心加速度)は、模型水路部64の底板部64gの上から下に向かう重力加速度に相当していることになる。
【0053】
また、回転アーム63の回転にともなう遠心力により、プラットホーム65は、回動ヒンジ部67を回動中心として図7におけるD1の方向に回動する。これにより、台板部65a上の模擬陸域部66もともに回動し、プラットホーム65の全体が略水平状態になったときに、台板部65aと模擬陸域部66は、陸域部収容空間68の中に収容される。この場合には、例えば、陸域部収容空間68の一方の端部68aの側に、模擬地盤部106(図10参照)の一方の端部106aが対向し、陸域部収容空間68の他方の端部68bの側に、模擬地盤部106の他方の端部106bが対向するような状態となる。
【0054】
この際、模型水路部64の下側の側板部64fの部分は、図示しない駆動機構によりスライド移動等により開閉可能な構成となっており、遠心模型実験装置の回転が行われ、模擬陸域部66が陸域部収容空間68の中に収容された後の状態では、例えば図7における紙面手前側又は奥側へスライド移動により移動して開口が閉塞される。
【0055】
また、例えば回転アーム63の内部には、給水装置74と給水管75が設けられている。給水装置74には、図示しない水を収容するタンクと、ポンプが内蔵されている。給水管75は、一端がポンプに接続されるとともに、他端が模型水路部64の凹部64aの付近に位置するように設置されている。このような構成により、遠心模型実験装置が回転し、所定の回転速度に達した後には、給水装置74と給水管75により、模型水路部64の略樋状の凹部64aに、水が供給される。
【0056】
この場合、模型水路部64には、上述したような遠心加速度が作用していることから、凹部64aに供給された水は、図7において符号76で示すように、凹部64aに密着する。これにより、遠心模型実験装置が所定速度で回転しているときには、図7の紙面右端の模型水路部64においては、底板部64aが下底部となり、その上に水76が存在し、あたかも水平遠心加速度が重力加速度に相当するような状態が形成される。この水76は、模型水路部64の凹部64aのうち、上記した模型陸域部66以外の部分に溜まることとなる。
【0057】
また、例えば模型水路部64には、造波装置が設けられており、遠心模型実験装置が回転して所定の回転速度に達した後に、地震による津波を模擬する波を、上記の模擬水域部の水76に発生させることができるようになっている。
【0058】
図9中の(A)は、造波装置の一構成例を示す図である。図9中の(A)で示される造波装置の場合、造波装置72Aは、駆動機構85と、移動板86を有している。駆動機構85としては、直線状の往復運動を行う機構、例えばシリンダとピストンを有し、油圧や空気圧等で直線状の往復運動を行う機構、回転駆動源とクランクとスライダを有する「スライダ・クランク機構」その他の公知の機構を使用することが可能である。
【0059】
このような構成により、移動板86は、図9中(A)の方向D2に移動可能となっている。これにより、造波装置72Aは、模擬水域部76Aの円の接線方向に水を複数回押圧し、地震津波を模擬した波を発生させることができる。
【0060】
また、別形態の造波装置として、図9中(B)に示すような構成のものを使用することも可能である。図9中(B)に示す造波装置72Bは、模型水路部64aに設けられた収納ボックス91と、駆動機構92と、移動板93を有している。駆動機構92としては、直線状の往復運動を行う機構、例えばシリンダとピストンを有し、油圧や空気圧等で直線状の往復運動を行う機構、回転駆動源とクランクとスライダを有する「スライダ・クランク機構」その他の公知の機構を使用することが可能である。
【0061】
このような構成により、移動板93は、図9中(B)の方向D3に移動可能となっている。これにより、造波装置72Bは、模擬水域部76Bの水底付近の陥没を模擬することにより、地震津波を模擬した波を発生させることができる。
【0062】
上記のようにして、地震による津波を模擬した波を、模擬水域部76A,76Bに発生させる。図10中(B)に示すように、この模擬津波111は、模擬陸域部66に到達し、模擬陸域部66に設けられた構造物模型、例えば、防波堤模型100、岸壁模型101、家屋模型104、ビルディング模型105、模擬地盤部106などに、模擬津波111による種々の作用を及ぼす。
【0063】
なお、図6及び図7に示すように、第2の実施形態に係る遠心模型実験装置には、ビデオカメラ81と、計測・記録部82が設けられている。計測・記録部82には、図示しない画像記録装置などが内蔵されている。このような構成によって、模擬津波111が襲来したときの模擬陸域部66の被害状況を観察することができ、また、画像情報として記録し、その後に解析を行うこともできる。
【0064】
また、図10に示す模擬陸域部66の構造物模型などには、ひずみゲージなどの種々の検出器類を設置しておくことが可能であり、模擬津波111が構造物模型に与える衝撃力などを検出することが可能である。
【0065】
上述した第2の実施形態に係る遠心模型実験装置は、模型水路部64が円環状に連続した構成となっている。したがって、発生する模擬津波111は、実際の津波をより忠実に再現した波となっている。このため、構造物模型に与える影響等についても、より実際の状況に近いものとなっており、地震津波が来襲した際の地盤や構造物の挙動をより詳細に解明することができる。
【0066】
以上、本発明の好適な実施形態について説明したが、本発明の技術的範囲は上記各実施形態に記載の範囲には限定されない。上記各実施形態には、多様な変更又は改良を加えることが可能である。
【0067】
例えば、第2の実施形態に係る遠心模型実験装置において、模型水路部64については、プラットホーム65が略水平方向に振り上げられ、模擬陸域部66が模型水路部64中にセットされて初めて実験可能となるが、この模型水路部64とプラットホーム65とは、遠心加速度を受ける状態において確実に連結され、しかも実験終了後には、確実に連結を解除する構成が求められる。
【0068】
そこで、図11中の(A)において示すように、プラットホーム65の先端形状を先細の楔形状となるように角度を付けた傾斜面とし、しかもその傾斜面上に水を確実にシールする目的でパッキン121を設置する構成を採用する。一方、プラットホーム65の全体が略水平状態になったときに上記傾斜面と対向する回転アーム63側の面についても、パッキン122を設置しておく。そして、プラットホーム65の全体が略水平状態になったとき、図示しない油圧シリンダ等の押圧機構を用いることによってプラットホーム65を外周方向に押し出し、パッキン121,122同士のしっかりとした押し合いと、プラットホーム65の楔形状の効果とによって、水の確実なシールが実現する。
【0069】
実験は、上述したシール状態が成ったときに水を注入して行われ、また、実験終了後には、パッキン121,122同士の押し合いに用いた押圧機構を逆に作動させてパッキン121,122同士を引き離し、遠心模型実験装置の回転数を下げることによってプラットホーム65の傾動角度を下げ、最終的に遠心模型実験装置を停止させればよい。
【0070】
また、第2の実施形態に係る遠心模型実験装置では、図9を用いて造波装置に適用可能な種々の構成例を説明した。しかし、本発明の適用範囲は、上述したものには限られない。例えば、図12において示すような造波装置を適用することも可能である。すなわち、図12において例示する造波装置72Cは、水路130の上部にリニアガイドレール127とラック129を並列に配置する一方、この水路130に設置される造波板126には、リニアガイドレール127上を往復直線運動自在とされる図示しないガイドブロックと、ラック129に噛み合う歯車128を設置する構成とした。なお、造波板126に対するガイドブロック(不図示)の取り付けは、ボルト等の締結手段により行われており、歯車128の取り付けについては、造波板126上に設置されるオイルモータ125を介して行われている。
【0071】
したがって、図12において例示する造波装置72Cは、リニアガイドレール127とガイドブロック(不図示)とによって構成されるリニアガイド装置によって造波の際のモーメント反力を受け、ラック129とそれに噛合する歯車128とによって確実な駆動力の伝達が行われることになる。このような構成の造波装置72Cは、大きな遠心加速度を受けながらも正常に動作する必要のある造波装置にとって好適な構成であり、造波装置72Cの自重と水から受けることになる反力を水路130の上部でしっかり受けることができ、しかもスムーズな動作を実現可能としている。
【0072】
なお、図12において例示する造波装置72Cの駆動源となるオイルモータ125に関しても、上述した油圧発生機構51を用いて作動油を供給することが好適であり、大きな抵抗を受ける造波板126を駆動させて波を発生させるに十分な油圧を供給することができる。
【0073】
また、上述した第1及び第2の実施形態に係る遠心模型実験装置では、動力発生手段が、オイルポンプ52、ピニオンギア53及びラックギア54から成る油圧発生機構51として構成される場合を例示して説明を行ったが、本発明に係る動力発生手段の適用範囲は上述した油圧発生機構51に限られるものではない。
【0074】
例えば、上記オイルポンプ52を発電機に取り換えることによって、回転アーム21,63の回転運動から得られる回転動力をこの発電機を利用して電力に変換し、回転アーム21,63で利用することができる。また、上記オイルポンプ52を圧縮空気発生ポンプに取り換えることによって、回転アーム21,63の回転運動から得られる回転動力をこの圧縮空気発生ポンプを利用して圧縮空気に変換し、回転アーム21,63で利用することができる。なお、これらオイルポンプ52、発電機、圧縮空気発生ポンプについては、これらを単独で、あるいは組み合わせて用いることも可能である。そして、以上の様な変更又は改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。
【図面の簡単な説明】
【0075】
【図1】第1の実施形態に係る遠心模型実験装置の概略構成を例示する正面図であり、特に回転アームが回転していない状態を示している。
【図2】第1の実施形態に係る遠心模型実験装置の概略構成を例示する正面図であり、特に回転アームが高速回転することによってプラットホームが略水平方向に振り上がっている状態を示している。
【図3】第1の実施形態に係る油圧発生機構の構成部材と作動原理を説明するための概念図である。
【図4】第1の実施形態に係る遠心模型実験装置に対する油圧発生機構の設置方法を例示する図である。
【図5】第2の実施形態に係る遠心模型実験装置の回転前の状態を示す正面図である。
【図6】第2の実施形態に係る遠心模型実験装置の回転前の状態を示す上面図である。
【図7】第2の実施形態に係る遠心模型実験装置の回転中の状態を示す正面図である。
【図8】第2の実施形態に係る遠心模型実験装置の回転中の状態を示す上面図である。
【図9】第2の実施形態に係る遠心模型実験装置に適用可能な造波装置の構成例を示す図である。
【図10】第2の実施形態に係る遠心模型実験装置に適用可能な模擬陸域部の構成例を示す図であり、また、第2の実施形態に係る遠心模型実験装置の作用を説明するための図である。
【図11】本発明に適用可能なプラットホームの別の構成例を示す図である。
【図12】本発明に適用可能な造波装置の別の構成例を示す図である。
【図13】従来の遠心模型実験装置の概略構成を示す図である。
【符号の説明】
【0076】
11 中心軸、12 スリップリング、21 回転アーム、22 固定手段、31 プラットホーム、31a 一方のプラットホーム、31b 他方のプラットホーム、32 試料容器、33 カウンターウエイト、41 モータ、42 減速器、51 油圧発生機構、52 オイルポンプ、53 ピニオンギア、54 ラックギア、55 ベース部分、61 モータ、61a モータ軸、62 中心軸、63 回転アーム、63a 中央支持部、63b1〜63b8 放射腕部、63c 支持リング部、64 模型水路部、64a 底板部、64b,64c 側板部、64d 凹部、64e 上側の側板部、64f 下側の側板部、64g 底板部、65 プラットホーム、65a 台板部、65b 吊下部材、66 模擬陸域部、67 回動ヒンジ部、67a 円筒状部材、67b 部材、68 陸域部収納空間、68a (陸域部収容空間の)一方の端部、68b (陸域部収容空間の)他方の端部、69 減速機、70 固定床、72A,72B,72C 造波装置、74 給水装置、75 給水管、76 水、76A,76B 模擬水域部、81 ビデオカメラ、82 計測・記録部、85 駆動機構、86 移動板、91 収納ボックス、92 駆動機構、93 移動板、100 防波堤模型、101 岸壁模型、104 家屋模型、105 ビルディング模型、106 模擬地盤部、106a (模擬地盤部の)一方の端部、106b (模擬地盤部の)他方の端部、111 模擬津波、121,122 パッキン、125 オイルモータ、126 造波板、127 リニアガイドレール、128 歯車、129 ラック、130 水路、201 回転アーム、202 試料容器。
【特許請求の範囲】
【請求項1】
鉛直方向に立設されるとともに軸心を回転中心として回転駆動自在に設置される中心軸と、
前記中心軸から水平方向且つ直線状に延びて形成されるとともに前記中心軸の回転駆動に従って回転運動する回転アームと、
前記回転アームに傾動自在に設置され、前記回転アームが回転運動したときに重力加速度と遠心加速度の合成加速度の方向に振り上がるように構成されるプラットホームと、
前記中心軸に対して回転駆動力を及ぼす回転駆動源と、
を備える遠心模型実験装置であって、
前記回転駆動源による前記中心軸の回転運動にともなって前記回転アームが回転運動したときに、この回転運動を利用して動力を発生させる動力発生手段を備えることを特徴とする遠心模型実験装置。
【請求項2】
請求項1に記載の遠心模型実験装置において、
前記動力発生手段が発生させる動力は、少なくとも油圧、電力又は圧縮空気であることを特徴とする遠心模型実験装置。
【請求項3】
鉛直方向に立設されるとともに軸心を回転中心として回転駆動自在に設置される中心軸と、
前記中心軸から水平方向且つ直線状に延びて形成されるとともに前記中心軸の回転駆動に従って回転運動する回転アームと、
前記回転アームに傾動自在に設置され、前記回転アームが回転運動したときに重力加速度と遠心加速度の合成加速度の方向に振り上がるように構成されるプラットホームと、
前記中心軸に対して回転駆動力を及ぼす回転駆動源と、
を備える遠心模型実験装置であって、
油圧を発生するオイルポンプと、
前記オイルポンプに設置されるピニオンギアと、
前記ピニオンギアと噛合する円環状のラックギアと、
を備え、
前記ラックギアの円環状の円中心と前記中心軸の軸心が合致するように構成されることにより、前記回転アームが回転運動したときに前記ピニオンギアが前記ラックギア上を回転して前記オイルポンプを駆動させることを特徴とする遠心模型実験装置。
【請求項4】
請求項3に記載の遠心模型実験装置において、
前記オイルポンプは前記回転アームに設置され、
前記ラックギアは不動状態となるように設置されることにより、
前記回転アームが回転運動したときに前記ピニオンギアが前記ラックギア上を自転しながら公転するように構成されていることを特徴とする遠心模型実験装置。
【請求項5】
請求項3又は4に記載の遠心模型実験装置において、
前記合成加速度が略水平方向に働くことによって前記プラットホームが振り上がったときに、該プラットホームを前記回転アームに対して固定保持する固定手段を備え、
前記固定手段は、前記オイルポンプによって発生する油圧を用いて駆動されることを特徴とする遠心模型実験装置。
【請求項1】
鉛直方向に立設されるとともに軸心を回転中心として回転駆動自在に設置される中心軸と、
前記中心軸から水平方向且つ直線状に延びて形成されるとともに前記中心軸の回転駆動に従って回転運動する回転アームと、
前記回転アームに傾動自在に設置され、前記回転アームが回転運動したときに重力加速度と遠心加速度の合成加速度の方向に振り上がるように構成されるプラットホームと、
前記中心軸に対して回転駆動力を及ぼす回転駆動源と、
を備える遠心模型実験装置であって、
前記回転駆動源による前記中心軸の回転運動にともなって前記回転アームが回転運動したときに、この回転運動を利用して動力を発生させる動力発生手段を備えることを特徴とする遠心模型実験装置。
【請求項2】
請求項1に記載の遠心模型実験装置において、
前記動力発生手段が発生させる動力は、少なくとも油圧、電力又は圧縮空気であることを特徴とする遠心模型実験装置。
【請求項3】
鉛直方向に立設されるとともに軸心を回転中心として回転駆動自在に設置される中心軸と、
前記中心軸から水平方向且つ直線状に延びて形成されるとともに前記中心軸の回転駆動に従って回転運動する回転アームと、
前記回転アームに傾動自在に設置され、前記回転アームが回転運動したときに重力加速度と遠心加速度の合成加速度の方向に振り上がるように構成されるプラットホームと、
前記中心軸に対して回転駆動力を及ぼす回転駆動源と、
を備える遠心模型実験装置であって、
油圧を発生するオイルポンプと、
前記オイルポンプに設置されるピニオンギアと、
前記ピニオンギアと噛合する円環状のラックギアと、
を備え、
前記ラックギアの円環状の円中心と前記中心軸の軸心が合致するように構成されることにより、前記回転アームが回転運動したときに前記ピニオンギアが前記ラックギア上を回転して前記オイルポンプを駆動させることを特徴とする遠心模型実験装置。
【請求項4】
請求項3に記載の遠心模型実験装置において、
前記オイルポンプは前記回転アームに設置され、
前記ラックギアは不動状態となるように設置されることにより、
前記回転アームが回転運動したときに前記ピニオンギアが前記ラックギア上を自転しながら公転するように構成されていることを特徴とする遠心模型実験装置。
【請求項5】
請求項3又は4に記載の遠心模型実験装置において、
前記合成加速度が略水平方向に働くことによって前記プラットホームが振り上がったときに、該プラットホームを前記回転アームに対して固定保持する固定手段を備え、
前記固定手段は、前記オイルポンプによって発生する油圧を用いて駆動されることを特徴とする遠心模型実験装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2008−185410(P2008−185410A)
【公開日】平成20年8月14日(2008.8.14)
【国際特許分類】
【出願番号】特願2007−18060(P2007−18060)
【出願日】平成19年1月29日(2007.1.29)
【出願人】(501241911)独立行政法人港湾空港技術研究所 (84)
【Fターム(参考)】
【公開日】平成20年8月14日(2008.8.14)
【国際特許分類】
【出願日】平成19年1月29日(2007.1.29)
【出願人】(501241911)独立行政法人港湾空港技術研究所 (84)
【Fターム(参考)】
[ Back to top ]