
遠隔区域における圧力を制御するシステム及び方法
iを1からNまでの整数としてi個の区域に管を介して接続可能なi個のラインを流れる流体フローを制御するシステムである。このシステムは、i個のラインのそれぞれにおける少なくとも1つの弁と圧力トランスデューサと、弁を制御する制御装置と、区域圧力評価計とを含む。区域圧力評価計は圧力トランスデューサに接続されており、i個の区域のそれぞれにおける評価された圧力を計算し、評価された圧力を制御装置に提供する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、広くは、圧力制御システムに関し、更に詳しくは、半導体処理装置において見られるような遠隔区域など、遠隔チャンバ又は区域を加圧及び真空化するシステム及び方法に関する。この場合の遠隔区域は、硬質又は可撓性の壁を有しており、結合されている又は結合されていない。
【背景技術】
【0002】
多くの機械及び機器は、その機器の動作の間に加圧される又は真空化されるチャンバ又は区域(ゾーン、zone)を含む。この出願では、区域とは、包囲された体積と等しい意味である。遠隔区域は、可撓性の壁又は硬質の壁を有しており、相互に結合されている場合と結合されていない場合とがある。
【0003】
様々な区域の間の結合には、区域の壁が可撓的であり一方の区域が膨張して別の区域を圧迫する時に生じる体積結合(volumetric coupling)が含まれる。区域ドリフトに接続された真空圧力により出口フローが変更され結果としてフローの変遷が生じる場合には、出口結合(outlet coupling)が生じる。マニホルドの中への著しく急激なフローが存在しその結果として同一の源によって与えられる他の区域すべてに影響を及ぼすライン圧力の低下(過渡現象)が生じるときには、入口結合が生じる。
【0004】
化学的機械的研磨(CMP)機械は、使用される間に加圧され真空化される区域を含む機械の例である。CMPとは、半導体製造プロセスの一部として、特にシリコン・ウエハなどの基板を平坦化する方法である。このような基板は、一般に、導電性、半導電性又は絶縁性の層をシーケンシャルに積層して、その後でそれらの層にエッチングを行い回路の形状を作成することによって形成される。一連の層がシーケンシャルに積層されエッチングされると、基板の外側又は最も上側の表面は、ますます非平坦になっていく。従って、そのような基板表面を周期的に平坦化する必要性が存在するのである。
【0005】
平坦化方法は、典型的には、基板がCMP機械のキャリア又は研磨ヘッドの上に搭載されていることを要求する。基板の露出された表面は、キャリア・ヘッドの回転している研磨パッドに接触するように配置され、キャリア・ヘッドは、制御可能な圧力を基板に対して提供し、基板を研磨パッドに押し付ける。少なくとも1つの化学的に反応性の薬剤を含み場合によっては研磨用の粒子を含むスラリが、回転している研磨パッドの表面に供給される。
【0006】
典型的なキャリア・ヘッドの内部チャンバ又は区域は、少なくとも部分的には、加圧されている区域の上に膨張し区域の内部の真空化によって生じる真空と接触する弾力性のブラダによって形成される。例えば、キャリア・ヘッドの中の区域への加圧は、基板を回転している研磨パッドに対して圧迫するのに用いることができ、他方で、区域の中に真空を生じさせることは、基板を研磨パッドとの間で転送する間に基板をキャリア・ヘッドに対して保持する吸引を提供するのに用いられる。それぞれの区域における圧力は、研磨パッドがキャリア・ヘッドによって保持されている基板に対して所望の力を加えるように制御することができる。
【0007】
キャリア・ヘッドの遠隔区域の中の圧力を制御する気圧制御システムは、圧力トランスデューサと制御可能な弁とを有するフロー制御ラインを含む。気圧制御システムのフロー制御ラインは、例えば1メートル以上の比較的長い管を介して、キャリア・ヘッドの区域に接続することができる。気圧制御システムは、キャリア・ヘッドの区域を、少なくとも1つの真空源と少なくとも1つの圧力源とに接続する。気圧制御システムは、また、圧力トランスデューサから測定値を受け取りキャリア・ヘッドの遠隔区域を真空源に接続することによってキャリア・ヘッドに気圧によって動力を与えることを弁に命令するようにプログラムされたコンピュータに適切に接続されている。
【0008】
従来技術による気圧制御システムに付随する問題点として、このシステムは、そのフロー制御ラインに配置されたトランスデューサによって測定された圧力にだけ依存するという点がある。その結果として、制御システムは、気圧制御システムにおける圧力はキャリア・ヘッドの遠隔的に接続された区域における圧力と同じであると仮定することになる。しかし、それは、明らかに正しくないのであって、局所的な圧力過渡状態が気圧制御システムに生じ、それによって、システムの性能の深刻な劣化が生じるのである。
【0009】
従って、依然として望まれるのは、これに限定されることは意味しないが、CMPキャリア・ヘッドのチャンバなどの遠隔的に接続された区域を加圧及び真空化し、その区域に遠隔的に接続されたラインにおいてなされた圧力測定値を補償することに用いることができる改良型の圧力制御システム及び方法である。
【発明の開示】
【0010】
本発明は、区域の数であるi=1からNまで変動する複数区域型のシステムのための任意の圧力制御ソリューションにおいて用いることができるモデル・ベースの圧力観測器を提供する。更に、これらの区域は、硬質又は可撓性の壁を有し、結合型又は非結合型である。
【0011】
本発明のある実施例によると、iを1からNまでの整数として、i個の区域に管を介してそれぞれが接続可能なi個のラインを通過する流体フローを制御するシステムが提供される。このシステムは、前記i個のラインのそれぞれにおける少なくとも1つの弁及び圧力トランスデューサと、前記弁を制御する制御手段と、前記i個の区域における圧力を評価する区域圧力評価手段と、を含む。
【0012】
前記区域圧力評価手段は、前記圧力トランスデューサと第1の入力手段とに接続されており、前記フロー・ラインにおける測定された圧力(Pb)を前記圧力トランスデューサから受け取り、前記第1の入力手段からは、前記ラインを前記区域に接続する管と関連する定数(Ctube,i及びτtube,i)と、それぞれの区域の体積(Vz,i)と、STP条件の下にあるそれぞれの区域の初期体積(Vz0,i)と、体積膨張/縮小時定数(τv)と、区域iの膨張/縮小係数(γii)と、区域iと区域jとの間の結合係数(γij)とを受け取り、前記区域iの評価された圧力のn番目のサンプルを計算する。ここで、nは時間に依存し、前記評価された圧力は後述する方程式に従って計算される。
【0013】
制御手段は、前記ラインの弁と前記区域圧力評価手段と前記第2の入力手段とに接続されている。この制御手段は、前記第2の入力手段から前記i個の区域のそれぞれに対するn番目の圧力設定点を受け取り、前記区域圧力評価手段から前記i個の区域のそれぞれに対する評価された圧力のn番目のサンプルを受け取るようにプログラムされている。更に、この制御手段は、前記i個の区域のそれぞれに対するn番目の圧力設定点と前記区域圧力評価のn番目のサンプルとを比較し、前記n番目のサンプルが前記設定点と等しくない場合には、前記サンプルが前記設定点と等しくなるまで前記の弁を動作させるようにプログラムされている。
【0014】
本発明のある側面によると、複数区域型のシステムのすべての区域は、単一の圧力源からの供給を受けて単一の真空排気口に排出され、これらの区域の体積は膨張及び収縮可能であり、区域の体積は相互作用を行う(相互に押し合う)。
【0015】
本発明のこれ以外の側面及び効果として、このシステムは、限定を意味しないが、CMPキャリア・ヘッドのチャンバなど遠隔的に接続された複数の区域の加圧及び真空化に用いることができる。このシステムは、区域に遠隔的に接続されたラインにおいて測定された圧力測定値を補償し、複数区域型のシステムの加圧及び真空化に用いることができる。この場合、区域の壁は硬質であったり可撓性であったりしうるし、結合型の場合も非結合型の場合もある。
【0016】
本発明のこれ以外の特徴及び効果は、本発明の実施例を例示的に示し説明している以下の詳細な説明を読めば、当業者であれば理解できるはずである。理解できるように、本発明は、本発明から離れることなく様々な明らかな点において修正が可能である。従って、添付の図面及び詳細な説明は、制限を意味せず、あくまで例示的な性質を有する。
【発明を実施するための最良の形態】
【0017】
以下の説明では添付の図面を参照するが、添付の図面において、同一の参照符号を有する要素は同じ要素を表している。
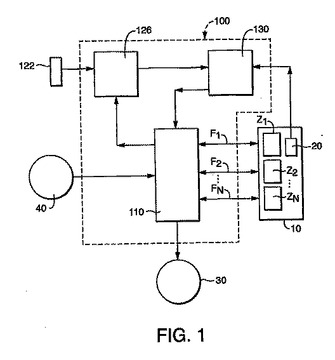
図1は、本発明に従って構築されたシステム100の実施例を示しており、このシステム100は、化学的機械的平坦化(CMP)機械10などの機械の遠隔的な区域Ziに真空源30と圧力源40とを接続する気圧マニホルド110を制御する。ここで、iは1からNまでの整数である。これら複数の区域Ziは、硬質の又は可撓性の壁を有し、結合型又は非結合型である。
【0018】
マニホルド110に加えて、図1のシステム100は、区域圧力評価計120と制御装置130とを含む。区域圧力評価計120と制御装置130とは、共に、別個に提供される又は一体のユニットとして提供されるコンピュータを含む。例えば、本発明の区域圧力評価計120は、別個の装置として提供されることもあるし、既存の圧力制御システムに「アフターマーケット」部品として追加されることもあり、更に、新規に製造される圧力制御システムにおいて制御装置130と一体化して提供されることもありうる。
【0019】
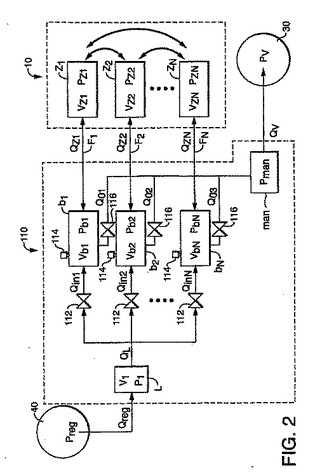
図2に示されているように、システム・マニホルド110は、フロー制御ラインbiを含む。ここでiは1からNまでの整数であり、遠隔区域Ziの数と対応している。フロー制御ラインbiは、入口マニホルド「L」とベンチュリを有するマニホルド「man」との間に接続されていて、真空源30と圧力源40とを遠隔区域Ziに接続する。それぞれのフロー制御ラインbiは、圧力源40を遠隔区域Ziに接続する入口弁112と、フロー制御ラインbiにおける圧力を測定する圧力トランスデューサ114と、遠隔区域Ziを真空源30に接続する出口弁116とを含む。
【0020】
図1の区域圧力評価計120は、図2に示されているように、システム・マニホルド110のトランスデューサ114からの圧力測定値を受け取り、システム100の物理パラメータを受け取るようにプログラムされている。これらの物理パラメータは、第1の入力装置122を介して、図1に示されているように、オペレータによって入力される。入力装置122は、例えば、キーボードとマウスとモニタとで構成される。区域圧力評価計120は、更に、これらの圧力測定値と物理パラメータとを用い、後で詳述するアルゴリズムを用いて、それぞれの区域Ziに対する圧力評価を計算して提供する。
【0021】
図1のシステム制御装置130は、図2に示されているように、区域圧力評価計120から区域圧力評価を受け取り、遠隔区域Ziのそれぞれに対する圧力設定点を受け取り、これらの区域圧力評価と圧力設定点とを用いてシステム・マニホルド110の弁112及び116を制御する。圧力設定点は、第2の入力装置(又は、上述した第1の入力装置)を用いてオペレータによって入力されるが、図1に示されているように、処理機械10の制御装置20によって入力されることもある。
【0022】
図2の実施例では、すべての区域Ziは、単一の圧力源呼吸センサ30からの供給を受け、単一の真空排気口30に排出がなされている。遠隔区域Ziは、膨張及び収縮可能な体積を有し、区域Ziの体積は相互作用(相互に押し合う)をする。
【0023】
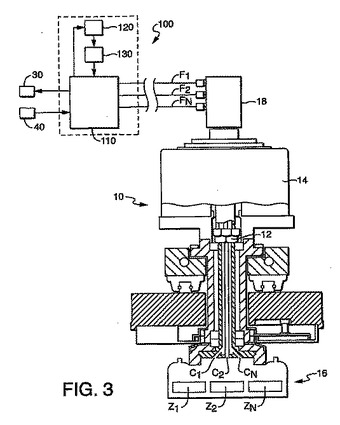
本発明のシステムの使用例として、図3に、図1の気圧制御システム100がCMP機械10のキャリア・ヘッド16のロータリ・ユニオンに接続された様子が示されている。キャリア・ヘッド16は、それ自体の軸の周囲を独立に回転し、回転モータ14をキャリア・ヘッド16に接続するキャリア駆動シャフト12を有している。駆動モータ14の上にあるロータリ・ユニオン18は、流体ラインFiを駆動シャフト12のチャネルCiに結合している。なおここで、iは1からNまでの整数であり、遠隔区域Ziの数に対応する。そして、チャネルCiは、それぞれが、キャリア・ヘッド16の中に含まれる遠隔区域Ziに接続される。
【0024】
明示的には示されていないが、キャリア・ヘッド16の遠隔区域Ziは、少なくとも部分的には、区域Ziが加圧されると膨張し区域Ziの内部に真空が形成されると収縮する弾力的なブラダによって形成されている。例えば、キャリア・ヘッド16の中の1つの区域Ziへの加圧は、基板を回転している研磨パッドに押し付けるのに用いられ、同じ区域Ziの中の真空形成は、基板を研磨パッドとの間で移動させる間に基板をキャリア・ヘッド16に対して保持する吸引を提供するのに用いられる。更に、それぞれの区域Ziにおける圧力は、研磨パッドがキャリア・ヘッド16によって保持された基板に所望の力を加えるように制御される。気圧制御システム100は、ロータリ結合部18から延長する流体ラインFiを真空源30と圧力源40とに接続する。システム100の制御装置130は、制御可能な弁112及び116を動作させて、キャリア・ヘッド16の遠隔区域Ziを真空源30と圧力源30とに選択的に接続し、従って、キャリア・ヘッド16に気圧的な動力を与える。
【0025】
従来技術の気圧制御システムに付随する問題として、システムが、マニホルド110のフロー制御ラインbiの中に配置されたトランスデューサ114によって測定された圧力だけに依存するという点がある。しかし、フロー制御ラインbiにおけるトランスデューサ114は、これらのラインの中の圧力を測定するだけであり、キャリア・ヘッド16の遠隔的に接続された区域Ziにおける圧力は測定しない。その結果として、制御システム130は、フロー制御ラインbiの中の圧力はキャリア・ヘッド16の遠隔的に接続された区域Ziにおける圧力と同じであると仮定することになる。しかし、フロー制御ラインbiにおいて局所的な圧力の過渡現象が生じると、これは必ずしも正しくなく、システム性能の深刻な低下につながる可能性がある。
【0026】
本発明は、新規で改良型の圧力制御システム100を提供する。この圧力制御システム100は、例えばCMPキャリア・ヘッド16などの半導体処理機器の遠隔的に接続された区域Ziを加圧し真空化するのに用いることができる。ただし、これに限定されるわけではない。更に、この圧力制御システム100は、区域Ziに遠隔的に接続されたフロー制御ラインbiにおいて得られた圧力測定値を補償する。この新規で改良型の気圧制御システム100は、区域Ziの数がi=1からi=Nまで変動する複数区域型のシステムを加圧し真空化するのに用いることができる。更に、この新規で改良型の気圧制御システム100は、硬質又は可撓性の壁を有し相互に結合された又は結合されていない遠隔的に接続された区域Ziと共に用いることができる。
【0027】
様々な区域Ziの間の結合は、3つの態様で生じうる。区域における体積結合(volumetric coupling)は、体積の膨張/収縮及び体積間の相互作用に起因して生じる。この相互作用は、例えば、一方の区域が膨張し別の区域を圧迫することにより第2の区域の内部圧力を上昇させることによって生じる。この場合には、区域の壁は可撓的(そして、膨張及び収縮可能)である。
【0028】
排気口における出口結合は、真空圧力レベルがドリフトし出口フローを変更させる場合に生じ、極端な場合には、結果的にフローが詰まった状態と詰まっていない状態との間で遷移する。これは、多くのフローがベンチュリ・ラインの中に投入されるベンチュリ・ポンプの場合に重要である。この場合には、区域の壁は、硬質でも可撓性でもありうる。
【0029】
入口結合は、ある区域の設定点が十分に高く設定されていてそのマニホルドの中への著しいフローの流入があり、結果的にライン圧力が降下する場合(過渡現象)に生じる。このライン圧力の低下は、圧力源によって圧力を供給されている他のすべての区域に影響する。この場合も、区域の壁は、硬質でも可撓性でもありうる。
【0030】
注意すべきであるが、ただ1つの区域と硬質の壁とを有するシステムは、「非結合型の単一区域システム」と考えられる。独立の入口によって供給され独立の排気口に排出がなされるそのような硬質区域は、多くの場合、「非結合型の複数区域システム」の例である。膨張及び収縮が可能な可撓性の壁を有する単一区域は、「結合型の単一区域システム」と考えられる。図1及び図2に図解されているシステム100は、「結合型の複数区域システム」であり、その結合のレベルは、入口、出口及び体積結合に基づいて数量化がなされる。
【0031】
区域圧力評価計120は、システム・マニホルド110におけるトランスデューサ114の圧力測定値とシステム100の物理パラメータとモデル・ベースのアルゴリズムとを用いて区域Ziの圧力を正確に評価することによって、区域Ziのそれぞれにおける圧力を評価するのに用いられる。直接的な結果として、閉ループにおいて区域圧力評価計120を用い区域Ziにおける圧力を制御する制御システム100は、区域Ziにおいて生じないシステム・マニホルド110における局所化された圧力過渡現象を克服し、従って、閉ループの制御性能を著しく向上させる。
【0032】
更に、区域圧力評価計120は、高度な制御システムの中への一体化が容易であり、入口圧力/フローと出口圧力/フローと区域容積相互作用との静的及び/又は動的な結合を示す複数の区域Ziを補償する。区域圧力評価計120は、遠隔区域Ziのサイズに対していかなる制約も課さない。区域圧力評価計120は、また、可撓性の壁を有する区域だけでなく、固定/硬質の壁を揺する区域Ziと共に用いることができる。区域圧力評価計120は、圧力設定点の異なる範囲に対して有効であり、高度な制御システムの中に一体化されると、一貫した過渡現象と定常現象とを保証する。
【0033】
区域圧力評価計120を動作させるのに用いられるモデル・ベースのアルゴリズムは、システム・マニホルド110の力学と、遠隔区域Ziの力学(dynamics)及び体積結合とに基づいている。
システム・マニホルド力学:
システム・マニホルド110のそれぞれのフロー・ラインbiの内部の有効圧力は、次の数式によって定義される。
【0034】
【数3】
【0035】
ここで、Pb,iはi番目の区域に対する測定チャンバの中のトランスデューサ114によって測定された圧力であり、PSTPは標準温度及び圧力(STP)状態における圧力であって、Qin,iは入力フローを意味し、Qo,i及びQz,iは出力フローを意味する。特に、Qo,iはi番目のフロー・ラインbiからベンチュリ・マニホルドへのフローであり、Qz,iはi番目の区域へのフローである。数式3では、Vb,iはi番目の区域に対するフロー・ラインbiの体積を意味する。
【0036】
ベンチュリ・マニホルド「man」への出力フローは、次の数式によって表すことができる。
【0037】
【数4】
【0038】
ここで、dorifice,iはベンチュリ・マニホルドに供給する測定フロー・ラインbiにおける固定オリフィスの直径であり、Pmanは真空ポンプ30に接続されたベンチュリ・マニホルドにおける圧力を意味する。注意すべきであるが、オリフィスを流れるフローは、固定されたオリフィスにおける圧力差に応じて、詰まる場合も詰まらない場合もある。
区域力学及び体積結合:
それぞれの区域へのフローは、次の力学方程式によって記述することができる(ナビエ・ストークス(Navier-Stokes)方程式から導かれる)。
【0039】
【数5】
【0040】
ここで、Qz,i及びPz,iはi番目の区域への入口フローとi番目の区域における圧力とをそれぞれ表し、Ctube,i及びτtube,iは測定フロー・ラインbから区域Ziへの管と関連する定数である。
【0041】
それぞれの区域Ziの中の圧力力学は、次の数式によって記述することができる。
【0042】
【数6】
【0043】
ここで、それぞれの区域Ziの体積はVz,iによって表され、複数の区域Ziの間の結合に起因する動的な体積相互作用は、次のように数学的に記述することができる。
【0044】
【数7】
【0045】
ここで、Vz0,iは標準温度及び圧力(STP)条件の下でのそれぞれの区域の初期体積であり、τvは体積膨張/収縮時定数であり、γiiは膨張/収縮係数であり、γijは区域iと区域jとの間の結合係数である。注意すべきであるが、質量/慣性効果は無視できると仮定する(従って、加速度項は存在しない)。
区域圧力評価計:
制御の目的は、遠隔区域Ziの中の圧力を調整することである。しかし、圧力トランスデューサ114は、システム・マニホルド110のフロー・ラインbの中に囲われている(区域Ziとは逆である)。図1に示されるように、システム・マニホルド110は、長い管Fiによって遠隔区域Ziから隔てられている。
【0046】
1つの解決策は、上述の区域フロー方程式(数式5)を、次のような離散形式に書き直すことである。
【0047】
【数8】
【0048】
ここで、Q(n)z,iΛ(実際の数式ではΛはQの真上に書かれているが、ここでは、入力の都合上、後に書かれている)は、i番目の区域へのフロー評価のn番目のサンプルである。なお、Pbはフロー・ライン圧力トランスデューサ114によって測定された圧力である。
【0049】
数式7による表現の離散的な解は、次のように得られる。
【0050】
【数9】
【0051】
ここで、V(n)z,iΛ(実際の数式ではΛはVの真上に書かれているが、ここでは、入力の都合上、後に書かれている)は、i番目の区域への体積評価のn番目のサンプルである。以上の数式6、8及び9に基づいて、区域圧力評価計120のアルゴリズムは、次のように構成される。
【0052】
【数10】
【0053】
ここで、P(n)z,iΛ(実際の数式ではΛはPの真上に書かれているが、ここでは、入力の都合上、後に書かれている)は、i番目の区域への圧力評価のn番目のサンプルである。Q(n)z,iΛ(実際の数式ではΛはQの真上に書かれているが、ここでは、入力の都合上、後に書かれている)は、数式8において定義されたフロー評価から得られるが、あるいは、直接的なフロー測定値Qzが得られるときにはQzによって代替することができる。V(n)z,iΛ(実際の数式ではΛはVの真上に書かれているが、ここでは、入力の都合上、後に書かれている)は数式9から得られる。
【0054】
構成上の理由から体積の膨張を示さず従って体積結合を示さない固定された体積(すなわち、硬質の壁)の場合には、1からNまでの任意の整数i及びjに対して、γij=0である。その結果、数式7の表現はVz,i=Vz0,iであり、任意のnに対してV(n)z,iΛ(実際の数式ではΛはVの真上に書かれているが、ここでは、入力の都合上、後に書かれている)=Vz0,iである。従って、数式10から、硬質の壁を有し固定された体積を有するP(n)z,iΛ(実際の数式ではΛはPの真上に書かれているが、ここでは、入力の都合上、後に書かれている)は、次のように書き直すことができる。
【0055】
【数11】
【0056】
注意すべきであるが、評価計方程式の離散的な実現は陽(explicit)の場合も陰(implicit)の場合もあり、この離散的な実現が周知の安定条件を満足する限りは、システムの性能に認識可能な影響を及ぼすことはない。
制御アルゴリズム:
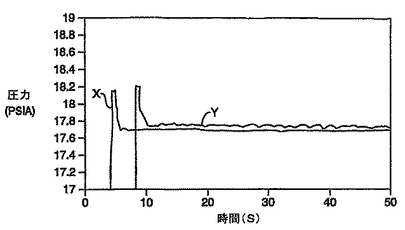
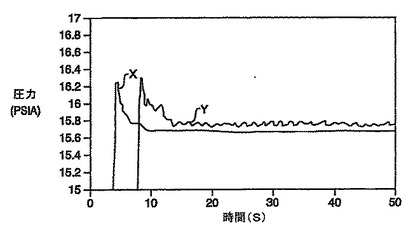
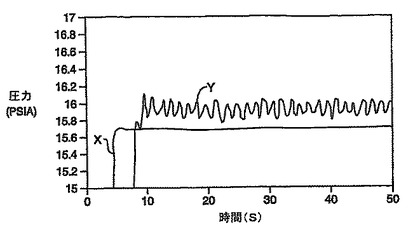
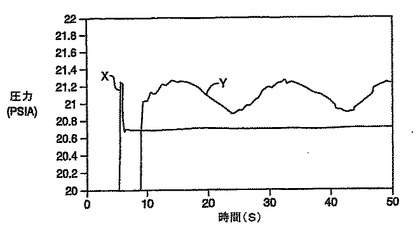
区域圧力評価計120の性能を有効にするためには、数式8、9及び10において定義された計算は区域圧力評価計120の中にプログラムされた制御アルゴリズムの中に一体化され、以下の実験が図1に示されたシステム100と、従来技術に従って構築されたシステム(つまり、区域圧力評価計120を含まない)とを用いて実行された。図4から図7を参照すると、図1の評価計ベースの制御装置100によるライン「X」によって表された定常状態の性能は、体積及び圧力の設定点の範囲において、評価計ベースの制御装置100は無視できる発振しか生じておらず、はるかに小さな定常状態オフセットしか生じていないという点において、従来技術に従って構築されたシステムによるライン「Y」によって表された定常状態の性能よりもはるかに優れている。
【0057】
N2(窒素)に対する長さが1.2mで内径が4mmの管によってそれぞれの測定チャンバに接続された遠隔区域Ziに対するシステム・パラメータの例を次に示す。
PSTP=14.7psia STP条件での圧力
ρSTP=1.16kg/m3 STP条件での密度
γ=1.4 比熱
TI=300度K 動作温度
R=297J/kg−K 理想気体定数
μ=1.77x10−4poise 粘度係数
Ctube=(ほぼ)65400kg/cc 管パラメータ
τtube=(ほぼ)3ms 管時定数
制御装置130は、CMP機械10のように、ラインbiの弁112及び116と区域圧力評価計120と第2の入力装置とに接続されている。一般に、制御装置130は、第2の入力装置20からi個の区域のそれぞれに対するn番目の圧力設定点を受け取り、区域圧力評価計120からi個の区域のそれぞれに対する区域圧力評価のn番目のサンプルを受け取り、i個の区域のそれぞれに対するn番目の圧力設定点と区域圧力評価のn番目のサンプルとを比較して、サンプルが設定点と等しくない場合には、サンプルが設定点と等しくなるまで、弁112及び116を動作させる。
【0058】
以上のように、本発明は、例えばCMPキャリア・ヘッドなどの半導体処理装置の遠隔的に接続された体積の加圧及び真空化に使用することができる新規で改良型の気圧制御システム100を提供する。ただし、この用途に限定はされない。そして、本発明によるシステム100は、体積に遠隔的に接続されたチャンバの中で得られた圧力測定値を補償する。更に、本発明による気圧制御システム100は、体積又は区域の数がi=1からi=Nまで変動する複数体積型のシステムを加圧し真空化するのに用いることができる。更に、この新規で改良型の気圧制御システム100は、硬質又は可撓性の壁を有し相互に結合された又は結合されていない遠隔的に接続された区域Ziと共に用いることができる。
【0059】
理解すべきであるが、本発明は、CMP機械と共に又はその一部として用いることができる気圧制御システム100に関するものである。しかし、本発明による気圧制御システム100は、CMP機械と共に又はその一部としての使用には限定されず、CMP機械以外の気圧制御される機械の遠隔的な区域と共に用いることができる。
【0060】
この明細書に記載された実施例は限定ではなく例示の目的で提供されており、様々な修正、組合せ及び代替を、冒頭の特許請求の範囲に定義された本発明の精神及び範囲から逸脱することなく行うことが可能である。
【図面の簡単な説明】
【0061】
【図1】本発明に従って構築され、真空源と圧力源とを、化学的機械的平坦化(CMP)機械などの機械の遠隔的な区域に接続する気圧制御システムを制御するシステム及び方法の実施例を示す図である。
【図2】図1のシステムのマニホルドの実施例を示しており、この例では相互に結合された複数の遠隔区域に真空及び圧力源を接続するフロー制御ラインを含んでいる。
【図3】ロータリ・ユニオンを介して図1の気圧制御システムに接続された遠隔区域を含むCMP機械の一例の部分的に断面を示した側面図である。
【図4】図1の気圧制御システムと従来技術による気圧制御システムとに関し、様々な体積及び圧力に対する圧力応答時間を図解するグラフである。
【図5】図1の気圧制御システムと従来技術による気圧制御システムとに関し、様々な体積及び圧力に対する圧力応答時間を図解するグラフである。
【図6】図1の気圧制御システムと従来技術による気圧制御システムとに関し、様々な体積及び圧力に対する圧力応答時間を図解するグラフである。
【図7】図1の気圧制御システムと従来技術による気圧制御システムとに関し、様々な体積及び圧力に対する圧力応答時間を図解するグラフである。
【技術分野】
【0001】
本発明は、広くは、圧力制御システムに関し、更に詳しくは、半導体処理装置において見られるような遠隔区域など、遠隔チャンバ又は区域を加圧及び真空化するシステム及び方法に関する。この場合の遠隔区域は、硬質又は可撓性の壁を有しており、結合されている又は結合されていない。
【背景技術】
【0002】
多くの機械及び機器は、その機器の動作の間に加圧される又は真空化されるチャンバ又は区域(ゾーン、zone)を含む。この出願では、区域とは、包囲された体積と等しい意味である。遠隔区域は、可撓性の壁又は硬質の壁を有しており、相互に結合されている場合と結合されていない場合とがある。
【0003】
様々な区域の間の結合には、区域の壁が可撓的であり一方の区域が膨張して別の区域を圧迫する時に生じる体積結合(volumetric coupling)が含まれる。区域ドリフトに接続された真空圧力により出口フローが変更され結果としてフローの変遷が生じる場合には、出口結合(outlet coupling)が生じる。マニホルドの中への著しく急激なフローが存在しその結果として同一の源によって与えられる他の区域すべてに影響を及ぼすライン圧力の低下(過渡現象)が生じるときには、入口結合が生じる。
【0004】
化学的機械的研磨(CMP)機械は、使用される間に加圧され真空化される区域を含む機械の例である。CMPとは、半導体製造プロセスの一部として、特にシリコン・ウエハなどの基板を平坦化する方法である。このような基板は、一般に、導電性、半導電性又は絶縁性の層をシーケンシャルに積層して、その後でそれらの層にエッチングを行い回路の形状を作成することによって形成される。一連の層がシーケンシャルに積層されエッチングされると、基板の外側又は最も上側の表面は、ますます非平坦になっていく。従って、そのような基板表面を周期的に平坦化する必要性が存在するのである。
【0005】
平坦化方法は、典型的には、基板がCMP機械のキャリア又は研磨ヘッドの上に搭載されていることを要求する。基板の露出された表面は、キャリア・ヘッドの回転している研磨パッドに接触するように配置され、キャリア・ヘッドは、制御可能な圧力を基板に対して提供し、基板を研磨パッドに押し付ける。少なくとも1つの化学的に反応性の薬剤を含み場合によっては研磨用の粒子を含むスラリが、回転している研磨パッドの表面に供給される。
【0006】
典型的なキャリア・ヘッドの内部チャンバ又は区域は、少なくとも部分的には、加圧されている区域の上に膨張し区域の内部の真空化によって生じる真空と接触する弾力性のブラダによって形成される。例えば、キャリア・ヘッドの中の区域への加圧は、基板を回転している研磨パッドに対して圧迫するのに用いることができ、他方で、区域の中に真空を生じさせることは、基板を研磨パッドとの間で転送する間に基板をキャリア・ヘッドに対して保持する吸引を提供するのに用いられる。それぞれの区域における圧力は、研磨パッドがキャリア・ヘッドによって保持されている基板に対して所望の力を加えるように制御することができる。
【0007】
キャリア・ヘッドの遠隔区域の中の圧力を制御する気圧制御システムは、圧力トランスデューサと制御可能な弁とを有するフロー制御ラインを含む。気圧制御システムのフロー制御ラインは、例えば1メートル以上の比較的長い管を介して、キャリア・ヘッドの区域に接続することができる。気圧制御システムは、キャリア・ヘッドの区域を、少なくとも1つの真空源と少なくとも1つの圧力源とに接続する。気圧制御システムは、また、圧力トランスデューサから測定値を受け取りキャリア・ヘッドの遠隔区域を真空源に接続することによってキャリア・ヘッドに気圧によって動力を与えることを弁に命令するようにプログラムされたコンピュータに適切に接続されている。
【0008】
従来技術による気圧制御システムに付随する問題点として、このシステムは、そのフロー制御ラインに配置されたトランスデューサによって測定された圧力にだけ依存するという点がある。その結果として、制御システムは、気圧制御システムにおける圧力はキャリア・ヘッドの遠隔的に接続された区域における圧力と同じであると仮定することになる。しかし、それは、明らかに正しくないのであって、局所的な圧力過渡状態が気圧制御システムに生じ、それによって、システムの性能の深刻な劣化が生じるのである。
【0009】
従って、依然として望まれるのは、これに限定されることは意味しないが、CMPキャリア・ヘッドのチャンバなどの遠隔的に接続された区域を加圧及び真空化し、その区域に遠隔的に接続されたラインにおいてなされた圧力測定値を補償することに用いることができる改良型の圧力制御システム及び方法である。
【発明の開示】
【0010】
本発明は、区域の数であるi=1からNまで変動する複数区域型のシステムのための任意の圧力制御ソリューションにおいて用いることができるモデル・ベースの圧力観測器を提供する。更に、これらの区域は、硬質又は可撓性の壁を有し、結合型又は非結合型である。
【0011】
本発明のある実施例によると、iを1からNまでの整数として、i個の区域に管を介してそれぞれが接続可能なi個のラインを通過する流体フローを制御するシステムが提供される。このシステムは、前記i個のラインのそれぞれにおける少なくとも1つの弁及び圧力トランスデューサと、前記弁を制御する制御手段と、前記i個の区域における圧力を評価する区域圧力評価手段と、を含む。
【0012】
前記区域圧力評価手段は、前記圧力トランスデューサと第1の入力手段とに接続されており、前記フロー・ラインにおける測定された圧力(Pb)を前記圧力トランスデューサから受け取り、前記第1の入力手段からは、前記ラインを前記区域に接続する管と関連する定数(Ctube,i及びτtube,i)と、それぞれの区域の体積(Vz,i)と、STP条件の下にあるそれぞれの区域の初期体積(Vz0,i)と、体積膨張/縮小時定数(τv)と、区域iの膨張/縮小係数(γii)と、区域iと区域jとの間の結合係数(γij)とを受け取り、前記区域iの評価された圧力のn番目のサンプルを計算する。ここで、nは時間に依存し、前記評価された圧力は後述する方程式に従って計算される。
【0013】
制御手段は、前記ラインの弁と前記区域圧力評価手段と前記第2の入力手段とに接続されている。この制御手段は、前記第2の入力手段から前記i個の区域のそれぞれに対するn番目の圧力設定点を受け取り、前記区域圧力評価手段から前記i個の区域のそれぞれに対する評価された圧力のn番目のサンプルを受け取るようにプログラムされている。更に、この制御手段は、前記i個の区域のそれぞれに対するn番目の圧力設定点と前記区域圧力評価のn番目のサンプルとを比較し、前記n番目のサンプルが前記設定点と等しくない場合には、前記サンプルが前記設定点と等しくなるまで前記の弁を動作させるようにプログラムされている。
【0014】
本発明のある側面によると、複数区域型のシステムのすべての区域は、単一の圧力源からの供給を受けて単一の真空排気口に排出され、これらの区域の体積は膨張及び収縮可能であり、区域の体積は相互作用を行う(相互に押し合う)。
【0015】
本発明のこれ以外の側面及び効果として、このシステムは、限定を意味しないが、CMPキャリア・ヘッドのチャンバなど遠隔的に接続された複数の区域の加圧及び真空化に用いることができる。このシステムは、区域に遠隔的に接続されたラインにおいて測定された圧力測定値を補償し、複数区域型のシステムの加圧及び真空化に用いることができる。この場合、区域の壁は硬質であったり可撓性であったりしうるし、結合型の場合も非結合型の場合もある。
【0016】
本発明のこれ以外の特徴及び効果は、本発明の実施例を例示的に示し説明している以下の詳細な説明を読めば、当業者であれば理解できるはずである。理解できるように、本発明は、本発明から離れることなく様々な明らかな点において修正が可能である。従って、添付の図面及び詳細な説明は、制限を意味せず、あくまで例示的な性質を有する。
【発明を実施するための最良の形態】
【0017】
以下の説明では添付の図面を参照するが、添付の図面において、同一の参照符号を有する要素は同じ要素を表している。
図1は、本発明に従って構築されたシステム100の実施例を示しており、このシステム100は、化学的機械的平坦化(CMP)機械10などの機械の遠隔的な区域Ziに真空源30と圧力源40とを接続する気圧マニホルド110を制御する。ここで、iは1からNまでの整数である。これら複数の区域Ziは、硬質の又は可撓性の壁を有し、結合型又は非結合型である。
【0018】
マニホルド110に加えて、図1のシステム100は、区域圧力評価計120と制御装置130とを含む。区域圧力評価計120と制御装置130とは、共に、別個に提供される又は一体のユニットとして提供されるコンピュータを含む。例えば、本発明の区域圧力評価計120は、別個の装置として提供されることもあるし、既存の圧力制御システムに「アフターマーケット」部品として追加されることもあり、更に、新規に製造される圧力制御システムにおいて制御装置130と一体化して提供されることもありうる。
【0019】
図2に示されているように、システム・マニホルド110は、フロー制御ラインbiを含む。ここでiは1からNまでの整数であり、遠隔区域Ziの数と対応している。フロー制御ラインbiは、入口マニホルド「L」とベンチュリを有するマニホルド「man」との間に接続されていて、真空源30と圧力源40とを遠隔区域Ziに接続する。それぞれのフロー制御ラインbiは、圧力源40を遠隔区域Ziに接続する入口弁112と、フロー制御ラインbiにおける圧力を測定する圧力トランスデューサ114と、遠隔区域Ziを真空源30に接続する出口弁116とを含む。
【0020】
図1の区域圧力評価計120は、図2に示されているように、システム・マニホルド110のトランスデューサ114からの圧力測定値を受け取り、システム100の物理パラメータを受け取るようにプログラムされている。これらの物理パラメータは、第1の入力装置122を介して、図1に示されているように、オペレータによって入力される。入力装置122は、例えば、キーボードとマウスとモニタとで構成される。区域圧力評価計120は、更に、これらの圧力測定値と物理パラメータとを用い、後で詳述するアルゴリズムを用いて、それぞれの区域Ziに対する圧力評価を計算して提供する。
【0021】
図1のシステム制御装置130は、図2に示されているように、区域圧力評価計120から区域圧力評価を受け取り、遠隔区域Ziのそれぞれに対する圧力設定点を受け取り、これらの区域圧力評価と圧力設定点とを用いてシステム・マニホルド110の弁112及び116を制御する。圧力設定点は、第2の入力装置(又は、上述した第1の入力装置)を用いてオペレータによって入力されるが、図1に示されているように、処理機械10の制御装置20によって入力されることもある。
【0022】
図2の実施例では、すべての区域Ziは、単一の圧力源呼吸センサ30からの供給を受け、単一の真空排気口30に排出がなされている。遠隔区域Ziは、膨張及び収縮可能な体積を有し、区域Ziの体積は相互作用(相互に押し合う)をする。
【0023】
本発明のシステムの使用例として、図3に、図1の気圧制御システム100がCMP機械10のキャリア・ヘッド16のロータリ・ユニオンに接続された様子が示されている。キャリア・ヘッド16は、それ自体の軸の周囲を独立に回転し、回転モータ14をキャリア・ヘッド16に接続するキャリア駆動シャフト12を有している。駆動モータ14の上にあるロータリ・ユニオン18は、流体ラインFiを駆動シャフト12のチャネルCiに結合している。なおここで、iは1からNまでの整数であり、遠隔区域Ziの数に対応する。そして、チャネルCiは、それぞれが、キャリア・ヘッド16の中に含まれる遠隔区域Ziに接続される。
【0024】
明示的には示されていないが、キャリア・ヘッド16の遠隔区域Ziは、少なくとも部分的には、区域Ziが加圧されると膨張し区域Ziの内部に真空が形成されると収縮する弾力的なブラダによって形成されている。例えば、キャリア・ヘッド16の中の1つの区域Ziへの加圧は、基板を回転している研磨パッドに押し付けるのに用いられ、同じ区域Ziの中の真空形成は、基板を研磨パッドとの間で移動させる間に基板をキャリア・ヘッド16に対して保持する吸引を提供するのに用いられる。更に、それぞれの区域Ziにおける圧力は、研磨パッドがキャリア・ヘッド16によって保持された基板に所望の力を加えるように制御される。気圧制御システム100は、ロータリ結合部18から延長する流体ラインFiを真空源30と圧力源40とに接続する。システム100の制御装置130は、制御可能な弁112及び116を動作させて、キャリア・ヘッド16の遠隔区域Ziを真空源30と圧力源30とに選択的に接続し、従って、キャリア・ヘッド16に気圧的な動力を与える。
【0025】
従来技術の気圧制御システムに付随する問題として、システムが、マニホルド110のフロー制御ラインbiの中に配置されたトランスデューサ114によって測定された圧力だけに依存するという点がある。しかし、フロー制御ラインbiにおけるトランスデューサ114は、これらのラインの中の圧力を測定するだけであり、キャリア・ヘッド16の遠隔的に接続された区域Ziにおける圧力は測定しない。その結果として、制御システム130は、フロー制御ラインbiの中の圧力はキャリア・ヘッド16の遠隔的に接続された区域Ziにおける圧力と同じであると仮定することになる。しかし、フロー制御ラインbiにおいて局所的な圧力の過渡現象が生じると、これは必ずしも正しくなく、システム性能の深刻な低下につながる可能性がある。
【0026】
本発明は、新規で改良型の圧力制御システム100を提供する。この圧力制御システム100は、例えばCMPキャリア・ヘッド16などの半導体処理機器の遠隔的に接続された区域Ziを加圧し真空化するのに用いることができる。ただし、これに限定されるわけではない。更に、この圧力制御システム100は、区域Ziに遠隔的に接続されたフロー制御ラインbiにおいて得られた圧力測定値を補償する。この新規で改良型の気圧制御システム100は、区域Ziの数がi=1からi=Nまで変動する複数区域型のシステムを加圧し真空化するのに用いることができる。更に、この新規で改良型の気圧制御システム100は、硬質又は可撓性の壁を有し相互に結合された又は結合されていない遠隔的に接続された区域Ziと共に用いることができる。
【0027】
様々な区域Ziの間の結合は、3つの態様で生じうる。区域における体積結合(volumetric coupling)は、体積の膨張/収縮及び体積間の相互作用に起因して生じる。この相互作用は、例えば、一方の区域が膨張し別の区域を圧迫することにより第2の区域の内部圧力を上昇させることによって生じる。この場合には、区域の壁は可撓的(そして、膨張及び収縮可能)である。
【0028】
排気口における出口結合は、真空圧力レベルがドリフトし出口フローを変更させる場合に生じ、極端な場合には、結果的にフローが詰まった状態と詰まっていない状態との間で遷移する。これは、多くのフローがベンチュリ・ラインの中に投入されるベンチュリ・ポンプの場合に重要である。この場合には、区域の壁は、硬質でも可撓性でもありうる。
【0029】
入口結合は、ある区域の設定点が十分に高く設定されていてそのマニホルドの中への著しいフローの流入があり、結果的にライン圧力が降下する場合(過渡現象)に生じる。このライン圧力の低下は、圧力源によって圧力を供給されている他のすべての区域に影響する。この場合も、区域の壁は、硬質でも可撓性でもありうる。
【0030】
注意すべきであるが、ただ1つの区域と硬質の壁とを有するシステムは、「非結合型の単一区域システム」と考えられる。独立の入口によって供給され独立の排気口に排出がなされるそのような硬質区域は、多くの場合、「非結合型の複数区域システム」の例である。膨張及び収縮が可能な可撓性の壁を有する単一区域は、「結合型の単一区域システム」と考えられる。図1及び図2に図解されているシステム100は、「結合型の複数区域システム」であり、その結合のレベルは、入口、出口及び体積結合に基づいて数量化がなされる。
【0031】
区域圧力評価計120は、システム・マニホルド110におけるトランスデューサ114の圧力測定値とシステム100の物理パラメータとモデル・ベースのアルゴリズムとを用いて区域Ziの圧力を正確に評価することによって、区域Ziのそれぞれにおける圧力を評価するのに用いられる。直接的な結果として、閉ループにおいて区域圧力評価計120を用い区域Ziにおける圧力を制御する制御システム100は、区域Ziにおいて生じないシステム・マニホルド110における局所化された圧力過渡現象を克服し、従って、閉ループの制御性能を著しく向上させる。
【0032】
更に、区域圧力評価計120は、高度な制御システムの中への一体化が容易であり、入口圧力/フローと出口圧力/フローと区域容積相互作用との静的及び/又は動的な結合を示す複数の区域Ziを補償する。区域圧力評価計120は、遠隔区域Ziのサイズに対していかなる制約も課さない。区域圧力評価計120は、また、可撓性の壁を有する区域だけでなく、固定/硬質の壁を揺する区域Ziと共に用いることができる。区域圧力評価計120は、圧力設定点の異なる範囲に対して有効であり、高度な制御システムの中に一体化されると、一貫した過渡現象と定常現象とを保証する。
【0033】
区域圧力評価計120を動作させるのに用いられるモデル・ベースのアルゴリズムは、システム・マニホルド110の力学と、遠隔区域Ziの力学(dynamics)及び体積結合とに基づいている。
システム・マニホルド力学:
システム・マニホルド110のそれぞれのフロー・ラインbiの内部の有効圧力は、次の数式によって定義される。
【0034】
【数3】
【0035】
ここで、Pb,iはi番目の区域に対する測定チャンバの中のトランスデューサ114によって測定された圧力であり、PSTPは標準温度及び圧力(STP)状態における圧力であって、Qin,iは入力フローを意味し、Qo,i及びQz,iは出力フローを意味する。特に、Qo,iはi番目のフロー・ラインbiからベンチュリ・マニホルドへのフローであり、Qz,iはi番目の区域へのフローである。数式3では、Vb,iはi番目の区域に対するフロー・ラインbiの体積を意味する。
【0036】
ベンチュリ・マニホルド「man」への出力フローは、次の数式によって表すことができる。
【0037】
【数4】
【0038】
ここで、dorifice,iはベンチュリ・マニホルドに供給する測定フロー・ラインbiにおける固定オリフィスの直径であり、Pmanは真空ポンプ30に接続されたベンチュリ・マニホルドにおける圧力を意味する。注意すべきであるが、オリフィスを流れるフローは、固定されたオリフィスにおける圧力差に応じて、詰まる場合も詰まらない場合もある。
区域力学及び体積結合:
それぞれの区域へのフローは、次の力学方程式によって記述することができる(ナビエ・ストークス(Navier-Stokes)方程式から導かれる)。
【0039】
【数5】
【0040】
ここで、Qz,i及びPz,iはi番目の区域への入口フローとi番目の区域における圧力とをそれぞれ表し、Ctube,i及びτtube,iは測定フロー・ラインbから区域Ziへの管と関連する定数である。
【0041】
それぞれの区域Ziの中の圧力力学は、次の数式によって記述することができる。
【0042】
【数6】
【0043】
ここで、それぞれの区域Ziの体積はVz,iによって表され、複数の区域Ziの間の結合に起因する動的な体積相互作用は、次のように数学的に記述することができる。
【0044】
【数7】
【0045】
ここで、Vz0,iは標準温度及び圧力(STP)条件の下でのそれぞれの区域の初期体積であり、τvは体積膨張/収縮時定数であり、γiiは膨張/収縮係数であり、γijは区域iと区域jとの間の結合係数である。注意すべきであるが、質量/慣性効果は無視できると仮定する(従って、加速度項は存在しない)。
区域圧力評価計:
制御の目的は、遠隔区域Ziの中の圧力を調整することである。しかし、圧力トランスデューサ114は、システム・マニホルド110のフロー・ラインbの中に囲われている(区域Ziとは逆である)。図1に示されるように、システム・マニホルド110は、長い管Fiによって遠隔区域Ziから隔てられている。
【0046】
1つの解決策は、上述の区域フロー方程式(数式5)を、次のような離散形式に書き直すことである。
【0047】
【数8】
【0048】
ここで、Q(n)z,iΛ(実際の数式ではΛはQの真上に書かれているが、ここでは、入力の都合上、後に書かれている)は、i番目の区域へのフロー評価のn番目のサンプルである。なお、Pbはフロー・ライン圧力トランスデューサ114によって測定された圧力である。
【0049】
数式7による表現の離散的な解は、次のように得られる。
【0050】
【数9】
【0051】
ここで、V(n)z,iΛ(実際の数式ではΛはVの真上に書かれているが、ここでは、入力の都合上、後に書かれている)は、i番目の区域への体積評価のn番目のサンプルである。以上の数式6、8及び9に基づいて、区域圧力評価計120のアルゴリズムは、次のように構成される。
【0052】
【数10】
【0053】
ここで、P(n)z,iΛ(実際の数式ではΛはPの真上に書かれているが、ここでは、入力の都合上、後に書かれている)は、i番目の区域への圧力評価のn番目のサンプルである。Q(n)z,iΛ(実際の数式ではΛはQの真上に書かれているが、ここでは、入力の都合上、後に書かれている)は、数式8において定義されたフロー評価から得られるが、あるいは、直接的なフロー測定値Qzが得られるときにはQzによって代替することができる。V(n)z,iΛ(実際の数式ではΛはVの真上に書かれているが、ここでは、入力の都合上、後に書かれている)は数式9から得られる。
【0054】
構成上の理由から体積の膨張を示さず従って体積結合を示さない固定された体積(すなわち、硬質の壁)の場合には、1からNまでの任意の整数i及びjに対して、γij=0である。その結果、数式7の表現はVz,i=Vz0,iであり、任意のnに対してV(n)z,iΛ(実際の数式ではΛはVの真上に書かれているが、ここでは、入力の都合上、後に書かれている)=Vz0,iである。従って、数式10から、硬質の壁を有し固定された体積を有するP(n)z,iΛ(実際の数式ではΛはPの真上に書かれているが、ここでは、入力の都合上、後に書かれている)は、次のように書き直すことができる。
【0055】
【数11】
【0056】
注意すべきであるが、評価計方程式の離散的な実現は陽(explicit)の場合も陰(implicit)の場合もあり、この離散的な実現が周知の安定条件を満足する限りは、システムの性能に認識可能な影響を及ぼすことはない。
制御アルゴリズム:
区域圧力評価計120の性能を有効にするためには、数式8、9及び10において定義された計算は区域圧力評価計120の中にプログラムされた制御アルゴリズムの中に一体化され、以下の実験が図1に示されたシステム100と、従来技術に従って構築されたシステム(つまり、区域圧力評価計120を含まない)とを用いて実行された。図4から図7を参照すると、図1の評価計ベースの制御装置100によるライン「X」によって表された定常状態の性能は、体積及び圧力の設定点の範囲において、評価計ベースの制御装置100は無視できる発振しか生じておらず、はるかに小さな定常状態オフセットしか生じていないという点において、従来技術に従って構築されたシステムによるライン「Y」によって表された定常状態の性能よりもはるかに優れている。
【0057】
N2(窒素)に対する長さが1.2mで内径が4mmの管によってそれぞれの測定チャンバに接続された遠隔区域Ziに対するシステム・パラメータの例を次に示す。
PSTP=14.7psia STP条件での圧力
ρSTP=1.16kg/m3 STP条件での密度
γ=1.4 比熱
TI=300度K 動作温度
R=297J/kg−K 理想気体定数
μ=1.77x10−4poise 粘度係数
Ctube=(ほぼ)65400kg/cc 管パラメータ
τtube=(ほぼ)3ms 管時定数
制御装置130は、CMP機械10のように、ラインbiの弁112及び116と区域圧力評価計120と第2の入力装置とに接続されている。一般に、制御装置130は、第2の入力装置20からi個の区域のそれぞれに対するn番目の圧力設定点を受け取り、区域圧力評価計120からi個の区域のそれぞれに対する区域圧力評価のn番目のサンプルを受け取り、i個の区域のそれぞれに対するn番目の圧力設定点と区域圧力評価のn番目のサンプルとを比較して、サンプルが設定点と等しくない場合には、サンプルが設定点と等しくなるまで、弁112及び116を動作させる。
【0058】
以上のように、本発明は、例えばCMPキャリア・ヘッドなどの半導体処理装置の遠隔的に接続された体積の加圧及び真空化に使用することができる新規で改良型の気圧制御システム100を提供する。ただし、この用途に限定はされない。そして、本発明によるシステム100は、体積に遠隔的に接続されたチャンバの中で得られた圧力測定値を補償する。更に、本発明による気圧制御システム100は、体積又は区域の数がi=1からi=Nまで変動する複数体積型のシステムを加圧し真空化するのに用いることができる。更に、この新規で改良型の気圧制御システム100は、硬質又は可撓性の壁を有し相互に結合された又は結合されていない遠隔的に接続された区域Ziと共に用いることができる。
【0059】
理解すべきであるが、本発明は、CMP機械と共に又はその一部として用いることができる気圧制御システム100に関するものである。しかし、本発明による気圧制御システム100は、CMP機械と共に又はその一部としての使用には限定されず、CMP機械以外の気圧制御される機械の遠隔的な区域と共に用いることができる。
【0060】
この明細書に記載された実施例は限定ではなく例示の目的で提供されており、様々な修正、組合せ及び代替を、冒頭の特許請求の範囲に定義された本発明の精神及び範囲から逸脱することなく行うことが可能である。
【図面の簡単な説明】
【0061】
【図1】本発明に従って構築され、真空源と圧力源とを、化学的機械的平坦化(CMP)機械などの機械の遠隔的な区域に接続する気圧制御システムを制御するシステム及び方法の実施例を示す図である。
【図2】図1のシステムのマニホルドの実施例を示しており、この例では相互に結合された複数の遠隔区域に真空及び圧力源を接続するフロー制御ラインを含んでいる。
【図3】ロータリ・ユニオンを介して図1の気圧制御システムに接続された遠隔区域を含むCMP機械の一例の部分的に断面を示した側面図である。
【図4】図1の気圧制御システムと従来技術による気圧制御システムとに関し、様々な体積及び圧力に対する圧力応答時間を図解するグラフである。
【図5】図1の気圧制御システムと従来技術による気圧制御システムとに関し、様々な体積及び圧力に対する圧力応答時間を図解するグラフである。
【図6】図1の気圧制御システムと従来技術による気圧制御システムとに関し、様々な体積及び圧力に対する圧力応答時間を図解するグラフである。
【図7】図1の気圧制御システムと従来技術による気圧制御システムとに関し、様々な体積及び圧力に対する圧力応答時間を図解するグラフである。
【特許請求の範囲】
【請求項1】
iを1からNまでの整数として、i個の区域に管を介してそれぞれが接続可能なi個のラインを通過する流体フローを制御するシステムであって、
前記i個のラインのそれぞれにおける少なくとも1つの弁と、
前記i個のラインのそれぞれに動作的に接続された圧力トランスデューサと、
このシステムの特性を受け取る第1の入力手段と、
前記圧力トランスデューサと前記第1の入力手段とに接続されており、前記i個のラインのそれぞれに対して、前記圧力トランスデューサからフロー・ラインiにおける測定された圧力を受け取り、前記第1の入力手段からこのシステムの特性を受け取り、前記区域iの圧力評価を計算するようにプログラムされた区域圧力評価手段と、
前記i個の区域のそれぞれに対する圧力設定点を受け取る第2の入力手段と、
前記ラインiの弁と前記区域圧力評価手段と前記第2の入力手段とに接続されており、前記第2の入力手段から前記区域iに対する圧力設定点を受け取り、前記区域圧力評価手段から前記区域iの圧力評価を受け取り、前記区域iに対する圧力設定点と前記区域iの圧力評価とを比較し、前記評価が前記設定点と等しくない場合には、前記評価が前記設定点と等しくなるまで前記ラインiの弁を動作させるようにプログラムされた制御手段と、
を含むことを特徴とするシステム。
【請求項2】
請求項1記載のシステムにおいて、前記i個のラインの入口に接続された圧力マニホルドを更に含むことを特徴とするシステム。
【請求項3】
請求項1記載のシステムにおいて、前記i個のラインの出口に接続された真空マニホルドを更に含むことを特徴とするシステム。
【請求項4】
請求項1記載のシステムにおいて、前記i個のラインのそれぞれの弁は、圧力源を前記ラインと接続する入口弁と、真空源を前記ラインと接続する出口弁とを含み、前記制御手段は、前記入口弁と前記出口弁とに接続されており、前記圧力評価が前記圧力設定点と等しくなるまで前記入口弁と前記出口弁とを動作させるようにプログラムされていることを特徴とするシステム。
【請求項5】
請求項4記載のシステムにおいて、前記入口弁に接続された圧力源を更に含むことを特徴とするシステム。
【請求項6】
請求項5記載のシステムにおいて、前記圧力源を前記入口弁に接続する圧力マニホルドを更に含むことを特徴とするシステム。
【請求項7】
請求項4記載のシステムにおいて、前記出口弁に接続された真空源を更に含むことを特徴とするシステム。
【請求項8】
請求項7記載のシステムにおいて、前記真空源を前記出口弁に接続する真空マニホルドを更に含むことを特徴とするシステム。
【請求項9】
請求項8記載のシステムにおいて、前記真空マニホルドはベンチュリ管を含むことを特徴とするシステム。
【請求項10】
請求項1記載のシステムにおいて、前記i個の区域は硬質の壁を有していることを特徴とするシステム。
【請求項11】
請求項1記載のシステムにおいて、前記i個の区域は可撓性の壁を有していることを特徴とするシステム。
【請求項12】
請求項1記載のシステムにおいて、前記i個の区域は結合されていることを特徴とするシステム。
【請求項13】
請求項1記載のシステムにおいて、前記i個の区域は結合されていないことを特徴とするシステム。
【請求項14】
請求項1記載のシステムにおいて、前記第1の入力手段はキーボードを含むことを特徴とするシステム。
【請求項15】
iを1からNまでの整数として、請求項1記載のシステムを含み、前記i個のラインに管を介してそれぞれ接続されたi個の区域を更に含むことを特徴とする機械。
【請求項16】
請求項15記載の機械において、前記第2の入力手段に接続されておりこの機械の前記i個の区域のそれぞれに対して前記圧力設定点を提供するようにプログラムされている機械制御手段を更に含んでいることを特徴とする機械。
【請求項17】
請求項15記載の機械において、前記i個の区域を含むCMPキャリア・ヘッドを更に含むことを特徴とする機械。
【請求項18】
請求項17記載の機械において、前記キャリア・ヘッドの区域は少なくとも部分的には可撓的に弾力性を有するブラダによって形成されていることを特徴とする機械。
【請求項19】
請求項18記載の機械において、前記キャリア・ヘッドの区域は相互に圧迫を加えることを特徴とする機械。
【請求項20】
請求項1記載のシステムにおいて、このシステムの特性は、前記ラインを前記区域iに接続する管に関連する定数(Ctube,i及びτtube,i)と、それぞれの区域iの体積(Vz,i)と、STP条件の下にあるそれぞれの区域iの初期体積(Vz0,i)と、体積拡張/縮小時定数(τv)と、区域iの膨張/縮小係数(γii)と、区域iと区域jとの間の結合係数(γij)と、を含むことを特徴とするシステム。
【請求項21】
請求項20記載のシステムにおいて、前記圧力評価手段は、前記区域iの圧力評価のn番目のサンプルである次のP(n)z,iΛ(ただし、ΛはPの上に配置される)を計算するようにプログラムされており、
【数1】
Pbは測定された圧力であり、nは時間に依存し、
前記制御手段は、前記第2の入力手段から前記i個の区域のそれぞれに対するn番目の圧力設定点を受け取り、前記区域圧力評価手段から前記i個の区域のそれぞれに対する圧力評価のn番目のサンプルを受け取り、前記i個の区域のそれぞれに対するn番目の圧力設定点と前記区域iの圧力評価のn番目のサンプルとを比較し、前記n番目のサンプルが前記n番目の設定点と等しくない場合には、前記サンプルが前記設定点と等しくなるまで前記弁を動作させるようにプログラムされていることを特徴とするシステム。
【請求項22】
iを1からNまでの整数として、i個の区域に管を介してそれぞれが接続可能なi個のラインを通過する流体フローを制御する方法であって、
前記フロー・ラインにおける測定された圧力を受け取るステップと、
このシステムの特性を受け取るステップと、
このシステムの特性に基づいて前記区域iの圧力評価を計算するステップと、
前記i個の区域のそれぞれに対する圧力設定点を受け取るステップと、
前記i個の区域のそれぞれに対する圧力設定点と前記i個の区域のそれぞれに対する圧力評価とを比較し、前記圧力評価が前記設定点と等しくない場合には、前記圧力評価が前記設定点と等しくなるまで前記フロー・ラインiを流れるフローを修正するステップと、
を含むことを特徴とする方法。
【請求項23】
請求項22記載の方法において、前記i個の区域は硬質の壁を有していることを特徴とする方法。
【請求項24】
請求項22記載の方法において、前記i個の区域は可撓性の壁を有していることを特徴とする方法。
【請求項25】
請求項22記載の方法において、前記i個の区域は結合されていることを特徴とする方法。
【請求項26】
請求項22記載の方法において、前記i個の区域は結合されていないことを特徴とする方法。
【請求項27】
請求項22記載の方法において、この方法の特性は、前記ラインを前記区域iに接続する管に関連する定数(Ctube,i及びτtube,i)と、それぞれの区域iの体積(Vz,i)と、STP条件の下にあるそれぞれの区域の初期体積(Vz0,i)と、体積膨張/縮小時定数(τv)と、区域iの膨張/縮小係数(γii)と、区域iと区域jとの間の結合係数(γij)と、を含むことを特徴とする方法。
【請求項28】
請求項27記載の方法において、前記区域iの圧力評価のn番目のサンプルである次のP(n)z,iΛ(ただし、ΛはPの上に配置される)を計算するようにプログラムされており、
【数2】
ここで、Pbは測定された圧力であり、nは時間に依存し、
前記i個の区域のそれぞれに対するn番目の圧力設定点が受け取られ、前記i個の区域のそれぞれに対するn番目の圧力設定点と前記区域iの圧力評価のn番目のサンプルとが比較され、前記n番目のサンプルが前記n番目の設定点と等しくない場合には、前記サンプルが前記設定点と等しくなるまで前記フロー・ラインを流れるフローが修正されることを特徴とする方法。
【請求項29】
iを1からNまでの整数として、i個の区域にそれぞれが接続可能なi個のラインのそれぞれの中の対応する圧力を制御することによりi個の区域のそれぞれの中の圧力を制御するシステムであって、
それぞれのラインを流れる流体フローを制御するように接続された少なくとも1つの制御弁と、
それぞれのラインにおける圧力を測定するように接続された圧力トランスデューサと、
それぞれの圧力トランスデューサに接続されており、前記i個のラインのそれぞれに対して、前記圧力トランスデューサからフロー・ラインiにおける測定された圧力を受け取り、前記区域iにおける評価された圧力を、このシステムの所定の特性と前記圧力トランスデューサによって提供された測定された圧力との関数として計算するようにプログラムされた区域圧力評価手段と、
対応するラインiのそれぞれの弁と前記区域圧力評価手段とに接続されており、前記弁を動作させ、圧力設定点と前記区域圧力評価手段からの前記区域iの評価された圧力との関数として、前記対応するラインiにおける流体フローを制御するようにプログラムされた制御手段と、
を含むことを特徴とするシステム。
【請求項30】
請求項29記載のシステムを含む機械において、前記i個のラインにそれぞれ接続されたi個の区域を更に含むことを特徴とする機械。
【請求項31】
請求項31記載の機械において、前記制御手段に接続されておりこの機械の前記i個の区域のそれぞれに対して前記圧力設定点を提供するようにプログラムされている機械制御手段を更に含んでいることを特徴とする機械。
【請求項32】
請求項31記載の機械において、前記i個の区域を含むCMPキャリア・ヘッドを更に含むことを特徴とする機械。
【請求項33】
請求項32記載の機械において、前記キャリア・ヘッドの区域は少なくとも部分的には可撓的に弾力性を有するブラダによって形成されていることを特徴とする機械。
【請求項34】
請求項33記載の機械において、前記キャリア・ヘッドの区域は相互に圧迫を加えることを特徴とする機械。
【請求項35】
iを1からNまでの整数として、i個の区域にそれぞれが接続可能なi個のフロー・ラインのそれぞれにおける対応する圧力を制御することによって、i個の区域のそれぞれの中の圧力を制御する方法であって、
少なくとも1つの制御弁を有するそれぞれのラインを通過する流体フローを制御するステップと、
それぞれのラインにおける圧力を測定するステップと、
前記区域iの中の評価された圧力を、このシステムの所定の特性と対応するフロー・ラインiにおける測定された圧力との関数として計算するステップと、
前記弁を動作させて、前記対応するフロー・ラインiにおける流体フローを、設定点と前記区域iの中の評価された圧力との関数として制御するステップと、
を含むことを特徴とする方法。
【請求項1】
iを1からNまでの整数として、i個の区域に管を介してそれぞれが接続可能なi個のラインを通過する流体フローを制御するシステムであって、
前記i個のラインのそれぞれにおける少なくとも1つの弁と、
前記i個のラインのそれぞれに動作的に接続された圧力トランスデューサと、
このシステムの特性を受け取る第1の入力手段と、
前記圧力トランスデューサと前記第1の入力手段とに接続されており、前記i個のラインのそれぞれに対して、前記圧力トランスデューサからフロー・ラインiにおける測定された圧力を受け取り、前記第1の入力手段からこのシステムの特性を受け取り、前記区域iの圧力評価を計算するようにプログラムされた区域圧力評価手段と、
前記i個の区域のそれぞれに対する圧力設定点を受け取る第2の入力手段と、
前記ラインiの弁と前記区域圧力評価手段と前記第2の入力手段とに接続されており、前記第2の入力手段から前記区域iに対する圧力設定点を受け取り、前記区域圧力評価手段から前記区域iの圧力評価を受け取り、前記区域iに対する圧力設定点と前記区域iの圧力評価とを比較し、前記評価が前記設定点と等しくない場合には、前記評価が前記設定点と等しくなるまで前記ラインiの弁を動作させるようにプログラムされた制御手段と、
を含むことを特徴とするシステム。
【請求項2】
請求項1記載のシステムにおいて、前記i個のラインの入口に接続された圧力マニホルドを更に含むことを特徴とするシステム。
【請求項3】
請求項1記載のシステムにおいて、前記i個のラインの出口に接続された真空マニホルドを更に含むことを特徴とするシステム。
【請求項4】
請求項1記載のシステムにおいて、前記i個のラインのそれぞれの弁は、圧力源を前記ラインと接続する入口弁と、真空源を前記ラインと接続する出口弁とを含み、前記制御手段は、前記入口弁と前記出口弁とに接続されており、前記圧力評価が前記圧力設定点と等しくなるまで前記入口弁と前記出口弁とを動作させるようにプログラムされていることを特徴とするシステム。
【請求項5】
請求項4記載のシステムにおいて、前記入口弁に接続された圧力源を更に含むことを特徴とするシステム。
【請求項6】
請求項5記載のシステムにおいて、前記圧力源を前記入口弁に接続する圧力マニホルドを更に含むことを特徴とするシステム。
【請求項7】
請求項4記載のシステムにおいて、前記出口弁に接続された真空源を更に含むことを特徴とするシステム。
【請求項8】
請求項7記載のシステムにおいて、前記真空源を前記出口弁に接続する真空マニホルドを更に含むことを特徴とするシステム。
【請求項9】
請求項8記載のシステムにおいて、前記真空マニホルドはベンチュリ管を含むことを特徴とするシステム。
【請求項10】
請求項1記載のシステムにおいて、前記i個の区域は硬質の壁を有していることを特徴とするシステム。
【請求項11】
請求項1記載のシステムにおいて、前記i個の区域は可撓性の壁を有していることを特徴とするシステム。
【請求項12】
請求項1記載のシステムにおいて、前記i個の区域は結合されていることを特徴とするシステム。
【請求項13】
請求項1記載のシステムにおいて、前記i個の区域は結合されていないことを特徴とするシステム。
【請求項14】
請求項1記載のシステムにおいて、前記第1の入力手段はキーボードを含むことを特徴とするシステム。
【請求項15】
iを1からNまでの整数として、請求項1記載のシステムを含み、前記i個のラインに管を介してそれぞれ接続されたi個の区域を更に含むことを特徴とする機械。
【請求項16】
請求項15記載の機械において、前記第2の入力手段に接続されておりこの機械の前記i個の区域のそれぞれに対して前記圧力設定点を提供するようにプログラムされている機械制御手段を更に含んでいることを特徴とする機械。
【請求項17】
請求項15記載の機械において、前記i個の区域を含むCMPキャリア・ヘッドを更に含むことを特徴とする機械。
【請求項18】
請求項17記載の機械において、前記キャリア・ヘッドの区域は少なくとも部分的には可撓的に弾力性を有するブラダによって形成されていることを特徴とする機械。
【請求項19】
請求項18記載の機械において、前記キャリア・ヘッドの区域は相互に圧迫を加えることを特徴とする機械。
【請求項20】
請求項1記載のシステムにおいて、このシステムの特性は、前記ラインを前記区域iに接続する管に関連する定数(Ctube,i及びτtube,i)と、それぞれの区域iの体積(Vz,i)と、STP条件の下にあるそれぞれの区域iの初期体積(Vz0,i)と、体積拡張/縮小時定数(τv)と、区域iの膨張/縮小係数(γii)と、区域iと区域jとの間の結合係数(γij)と、を含むことを特徴とするシステム。
【請求項21】
請求項20記載のシステムにおいて、前記圧力評価手段は、前記区域iの圧力評価のn番目のサンプルである次のP(n)z,iΛ(ただし、ΛはPの上に配置される)を計算するようにプログラムされており、
【数1】
Pbは測定された圧力であり、nは時間に依存し、
前記制御手段は、前記第2の入力手段から前記i個の区域のそれぞれに対するn番目の圧力設定点を受け取り、前記区域圧力評価手段から前記i個の区域のそれぞれに対する圧力評価のn番目のサンプルを受け取り、前記i個の区域のそれぞれに対するn番目の圧力設定点と前記区域iの圧力評価のn番目のサンプルとを比較し、前記n番目のサンプルが前記n番目の設定点と等しくない場合には、前記サンプルが前記設定点と等しくなるまで前記弁を動作させるようにプログラムされていることを特徴とするシステム。
【請求項22】
iを1からNまでの整数として、i個の区域に管を介してそれぞれが接続可能なi個のラインを通過する流体フローを制御する方法であって、
前記フロー・ラインにおける測定された圧力を受け取るステップと、
このシステムの特性を受け取るステップと、
このシステムの特性に基づいて前記区域iの圧力評価を計算するステップと、
前記i個の区域のそれぞれに対する圧力設定点を受け取るステップと、
前記i個の区域のそれぞれに対する圧力設定点と前記i個の区域のそれぞれに対する圧力評価とを比較し、前記圧力評価が前記設定点と等しくない場合には、前記圧力評価が前記設定点と等しくなるまで前記フロー・ラインiを流れるフローを修正するステップと、
を含むことを特徴とする方法。
【請求項23】
請求項22記載の方法において、前記i個の区域は硬質の壁を有していることを特徴とする方法。
【請求項24】
請求項22記載の方法において、前記i個の区域は可撓性の壁を有していることを特徴とする方法。
【請求項25】
請求項22記載の方法において、前記i個の区域は結合されていることを特徴とする方法。
【請求項26】
請求項22記載の方法において、前記i個の区域は結合されていないことを特徴とする方法。
【請求項27】
請求項22記載の方法において、この方法の特性は、前記ラインを前記区域iに接続する管に関連する定数(Ctube,i及びτtube,i)と、それぞれの区域iの体積(Vz,i)と、STP条件の下にあるそれぞれの区域の初期体積(Vz0,i)と、体積膨張/縮小時定数(τv)と、区域iの膨張/縮小係数(γii)と、区域iと区域jとの間の結合係数(γij)と、を含むことを特徴とする方法。
【請求項28】
請求項27記載の方法において、前記区域iの圧力評価のn番目のサンプルである次のP(n)z,iΛ(ただし、ΛはPの上に配置される)を計算するようにプログラムされており、
【数2】
ここで、Pbは測定された圧力であり、nは時間に依存し、
前記i個の区域のそれぞれに対するn番目の圧力設定点が受け取られ、前記i個の区域のそれぞれに対するn番目の圧力設定点と前記区域iの圧力評価のn番目のサンプルとが比較され、前記n番目のサンプルが前記n番目の設定点と等しくない場合には、前記サンプルが前記設定点と等しくなるまで前記フロー・ラインを流れるフローが修正されることを特徴とする方法。
【請求項29】
iを1からNまでの整数として、i個の区域にそれぞれが接続可能なi個のラインのそれぞれの中の対応する圧力を制御することによりi個の区域のそれぞれの中の圧力を制御するシステムであって、
それぞれのラインを流れる流体フローを制御するように接続された少なくとも1つの制御弁と、
それぞれのラインにおける圧力を測定するように接続された圧力トランスデューサと、
それぞれの圧力トランスデューサに接続されており、前記i個のラインのそれぞれに対して、前記圧力トランスデューサからフロー・ラインiにおける測定された圧力を受け取り、前記区域iにおける評価された圧力を、このシステムの所定の特性と前記圧力トランスデューサによって提供された測定された圧力との関数として計算するようにプログラムされた区域圧力評価手段と、
対応するラインiのそれぞれの弁と前記区域圧力評価手段とに接続されており、前記弁を動作させ、圧力設定点と前記区域圧力評価手段からの前記区域iの評価された圧力との関数として、前記対応するラインiにおける流体フローを制御するようにプログラムされた制御手段と、
を含むことを特徴とするシステム。
【請求項30】
請求項29記載のシステムを含む機械において、前記i個のラインにそれぞれ接続されたi個の区域を更に含むことを特徴とする機械。
【請求項31】
請求項31記載の機械において、前記制御手段に接続されておりこの機械の前記i個の区域のそれぞれに対して前記圧力設定点を提供するようにプログラムされている機械制御手段を更に含んでいることを特徴とする機械。
【請求項32】
請求項31記載の機械において、前記i個の区域を含むCMPキャリア・ヘッドを更に含むことを特徴とする機械。
【請求項33】
請求項32記載の機械において、前記キャリア・ヘッドの区域は少なくとも部分的には可撓的に弾力性を有するブラダによって形成されていることを特徴とする機械。
【請求項34】
請求項33記載の機械において、前記キャリア・ヘッドの区域は相互に圧迫を加えることを特徴とする機械。
【請求項35】
iを1からNまでの整数として、i個の区域にそれぞれが接続可能なi個のフロー・ラインのそれぞれにおける対応する圧力を制御することによって、i個の区域のそれぞれの中の圧力を制御する方法であって、
少なくとも1つの制御弁を有するそれぞれのラインを通過する流体フローを制御するステップと、
それぞれのラインにおける圧力を測定するステップと、
前記区域iの中の評価された圧力を、このシステムの所定の特性と対応するフロー・ラインiにおける測定された圧力との関数として計算するステップと、
前記弁を動作させて、前記対応するフロー・ラインiにおける流体フローを、設定点と前記区域iの中の評価された圧力との関数として制御するステップと、
を含むことを特徴とする方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2007−528556(P2007−528556A)
【公表日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願番号】特願2007−502811(P2007−502811)
【出願日】平成17年2月1日(2005.2.1)
【国際出願番号】PCT/US2005/003613
【国際公開番号】WO2005/093304
【国際公開日】平成17年10月6日(2005.10.6)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
【公表日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願日】平成17年2月1日(2005.2.1)
【国際出願番号】PCT/US2005/003613
【国際公開番号】WO2005/093304
【国際公開日】平成17年10月6日(2005.10.6)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
[ Back to top ]