
遠隔区画における圧力規制
【課題】離れて位置する区画内部における圧力を精度高く制御することができるシステムおよび方法を提供する。
【解決手段】圧力制御システムは、各エンクロージャに対して流入および流出する流体の流量を制御することによって、1つ以上の区画の内部圧力を遠隔的に制御する。各区画は、導管を介して1つのエンクロージャにそれぞれ接続されている。流体の圧力を、各エンクロージャ内において測定する。各区画内における推定圧力を、エンクロージャ内の測定圧力と、導管および区画の既知の特性との関数として計算する。区画毎に、各エンクロージャの入口比例弁および出口比例弁を動作させて、それぞれのエンクロージャに流入する流体の入力流速と、エンクロージャから流出する流体の出力流速とを、圧力設定点と推定圧力との関数として制御することにより、圧力設定点に応じて区画内部の圧力を規制する。
【解決手段】圧力制御システムは、各エンクロージャに対して流入および流出する流体の流量を制御することによって、1つ以上の区画の内部圧力を遠隔的に制御する。各区画は、導管を介して1つのエンクロージャにそれぞれ接続されている。流体の圧力を、各エンクロージャ内において測定する。各区画内における推定圧力を、エンクロージャ内の測定圧力と、導管および区画の既知の特性との関数として計算する。区画毎に、各エンクロージャの入口比例弁および出口比例弁を動作させて、それぞれのエンクロージャに流入する流体の入力流速と、エンクロージャから流出する流体の出力流速とを、圧力設定点と推定圧力との関数として制御することにより、圧力設定点に応じて区画内部の圧力を規制する。
【発明の詳細な説明】
【技術分野】
【0001】
(関連出願に対する相互引用)
本願は、2004年3月9日に出願され、"System and Method for Controlling Pressure in Remote Zones"(遠隔区画における圧力制御のためのシステム及び方法)と題する同時係属中の米国特許出願第10/796,723号(代理人整理番号MKS−136)の一部係属出願であり、その優先権を主張する。この同時係属中の特許出願第10/796,723号は、本願の譲受人に譲渡されている。
【背景技術】
【0002】
用途の中には、離れて位置する区画内部において圧力を規制することが必要となる場合もある。例えば、一部の機械および機器は、当該機器の動作中加圧または減圧するチェンバを含む場合がある。このような機械の例には、限定する訳ではないが、化学機械研磨(CMP)機械を含むことができる。
【0003】
測定チェンバ内部にある圧力センサは、当該測定チャンバ内部の圧力を計ることができるに過ぎず、センサに対して離れて位置する区画の内部圧力を計るのではない。その結果、測定チェンバ内部に位置する圧力センサによる圧力測定値のみを用いる圧力制御システムは、測定チェンバ内の圧力が遠隔区画における圧力と等しいと仮定しなければならない場合がある。しかしながら、測定チェンバ内の圧力はその区画の圧力とは等しくないことが多い。例えば、測定チェンバ内で局在化した圧力減衰が発生すると、測定チェンバ内の圧力は区画の圧力とは等しくなくなる可能性がある。その結果、圧力制御システムの性能に著しい低下が生ずる可能性がある。
【発明の開示】
【発明が解決しようとする課題】
【0004】
したがって、離れて位置する区画内部における圧力を精度高く制御することができるシステムおよび方法が求められている。
【課題を解決するための手段】
【0005】
区画内部における圧力を遠隔的に制御するシステは、圧力センサと、弁システムと、区画圧力推定部と、制御部とを含む。圧力センサは、導管を介して区画に接続可能であり、当該区画から離れて位置するエンクロージャ(例えば、測定チェンバ)内部の圧力を測定するように構成されている。弁システムは、エンクロージャに流入および流出し、導管を介して区画に達する流体の流量を制御するように構成されている。弁システムは、エンクロージャに流入する流体の入力流速を規制するように構成されている少なくとも1つの入口比例弁と、エンクロージャから流出する流体の出力流速を規制するように構成されている出口比例弁とを含む、弁システムと、区画圧力推定部は、区画内における推定圧力を、圧力センサが測定する圧力の関数として、更に導管の既知の特性の関数として計算するように構成されている。制御部は、入力流量および出力流量を、区画圧力推定部からの推定圧力と区画に対する圧力設定点との関数として制御するように、入口比例弁および出口比例弁を動作させることによって、区画内部の圧力を規制するように構成されている。
【0006】
各エンクロージャiに対して流入および流出し、各導管iを介して各区画iに達する流体の流量を制御することによって、i個のエンクロージャに導管iを介してそれぞれ接続可能なi個の区画の各々の内部における圧力を遠隔的に制御するシステムで(i=1,...,N)について記載する。このシステムは、圧力測定システムと、弁システムと、区画圧力推定部と、制御部とを含む。圧力測定システムは、i個のエンクロージャの各々において、流体の圧力を測定するように構成されている。弁システムは、エンクロージャi毎に、エンクロージャiに流入する流体の入力流速を規制するように構成されている少なくとも1つの入口比例弁と、エンクロージャiから流出する流体の出力流速を規制するように構成されている出口比例弁とを含む。
【0007】
区画圧力推定部は、圧力測定システムに結合されている。区画圧力推定部は、各区画i毎に、圧力測定システムからのエンクロージャiにおける測定圧力を受け取り、区画内における推定圧力を、エンクロージャiにおける測定圧力の関数として、更に導管iおよび区画iの既知の特性の関数として、計算するように構成されている。制御部は、エンクロージャiに流入する流体の入力流速、およびエンクロージャiから流出する流体の出口流速を、区画iに対する圧力設定点と区画圧力推定部からの区画i内部における推定圧力との関数として制御するように、入口比例弁および出口比例弁を動作させることによって、各区画i内部の圧力を制御するように構成されている。
【0008】
各エンクロージャiに対して流入および流出し、各導管iを介して各区画iに達する流体の流量を制御することによって、i個のエンクロージャに導管iを介してそれぞれ接続可能なi個の区画の各々の内部における圧力を遠隔的に制御する方法(i=1,...,N)について記載する。この方法は、i個のエンクロージャの各々において、流体の圧力を測定するステップを含む。更に、この方法は、区画内における推定圧力を、エンクロージャiにおける測定圧力の関数として、更に導管iおよび区画iの既知の特性の関数として、計算するステップを含む。更に、この方法は、区画i毎に、エンクロージャiに流入する流体の入力流速、およびエンクロージャiから流出する流体の出口流速を、区画iに対する圧力設定点と区画i内部における推定圧力との関数として制御するように、入口比例弁および出口比例弁を動作させることによって、各区画i内部の圧力を制御するステップを含む。
【発明を実施するための最良の形態】
【0009】
(詳細な説明)
本開示において、区画という用語は、密閉立体空間(enclosed volume)を意味することとする。圧力を制御すべき各遠隔区画の圧力を精度高く推定する、オブザーバに基づく解決策(observer-based solution)を用いて、遠隔区画における圧力を制御するシステムおよび方法について説明する。圧力制御システムにおいて遠隔区画の推定圧力を用いることによって、閉ループ制御の性能を著しく向上させることができる。例えば、測定チェンバ内では発生するが遠隔区画自体では発生しない局在的圧力低下を克服することができる。
【0010】
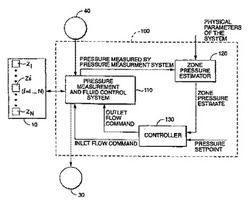
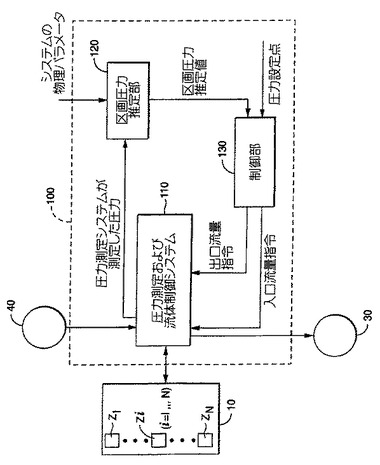
図1は、本開示における説明の一実施形態による、1つ以上の遠隔区画Zi(i=1,...,N)における圧力を規制する圧力制御システムを示す機能ブロック図である。図1に見られるように、全ての区画Ziは、1つの加圧流体源40に繋がれて加圧され、1つの真空排気機構30に達する。全体像では、圧力制御システム100は、圧力測定および流体制御システム110(図2に更に詳しく示す)、区画圧力推定部120、および制御部130を含むことができる。
【0011】
圧力制御システム100は、区画圧力推定部120を用いて、各遠隔区画における圧力を離れて制御することができる。導管Fi(図2に示す)を介して区画Ziに接続されているエンクロージャbi内部の測定圧力に基づいて、遠隔区画Zi内部における圧力を推定し、区画圧力推定部120からの推定圧力に基づいてエンクロージャに対する流入および流出を制御する。通例、エンクロージャは、圧力測定チェンバとすればよいが、流体を内部に密閉することができる密閉立体空間であれば、他のいずれの種類でも用いることができる。
【0012】
圧力測定および流体制御システム110は、圧力測定システムと、流体制御システムとを含むことができる。110における圧力測定システムは、例えば、複数の圧力センサを含むことができ、その各々はエンクロージャに接続され、エンクロージャ内部の圧力を測定するように構成されている。110における流体制御システムは、各エンクロージャに対して流入および流出する流体の流速を制御する弁システムを含むことができる。
【0013】
区画圧力推定部120は、圧力測定システムから圧力測定値を受け取ることができ、更にシステム100の物理パラメータを(例えば、顧客、操作者、またはその他の要員)から受けることができる。物理パラメータは、例えば、導管および区画の既知のパラメータを含むことができる。区画圧力推定部120は、更に、圧力測定値および物理パラメータを用いて、以下で更に詳しく説明する計算方法を用いて、区画毎に圧力推定値を計算し供給するように構成することができる。
【0014】
また、制御部130は、遠隔区画Ziの各々について圧力設定点を受け取ることができ、区画圧力推定値(区画圧力推定部120から)および圧力設定点を用いて、流体制御システムを制御することができる。即ち、制御部130は、各区画内部における圧力が圧力設定点に応じて規制されるように、各エンクロージャに対して流入および流出する流体の流速を弁システムによって制御することができる。
【0015】
図示した実施形態では、弁システムは、エンクロージャ毎に、エンクロージャに入る流体の入力流速を規制するように構成されている入口比例弁と、エンクロージャから出てくる流体の出力流速を規制するように構成されている出口比例弁とを含むことができる。制御部130は、区画出力推定部からの推定圧力および圧力設定点の関数として入力流速および出力流速を制御するように、入口比例弁および出口比例弁を動作させることによって、各区画内部の圧力を規制するように構成することができる。
【0016】
図1に模式的に示すように、制御部130は、入力流量(input flow)指令信号および出力流量(output flow)指令信号をブロック110内部の弁システムに送り(図2において更に詳しく説明する)、入力流速(input flow rate)および出力流速(output flow rate)を、それぞれ、入力流量指令信号および出力流量指令信号に応じて制御することができる。一実施形態例では、制御部は、各エンクロージャに対する入力流速および出力流速のPI(比例−積分)制御(以下で更に詳しく説明する)を実行するように構成することができるが、他の制御方法を用いてもよい。本制御システムおよび方法は、比例および積分(PI)型制御システムならびに方法として説明するが、他の多くの形式の制御システムおよび方法も用いることができ、限定ではなく、比例、積分、比例および微分(PD)、ならびに比例および積分および部分(PID)型のフィードバック制御システムおよび方法を含む。
【0017】
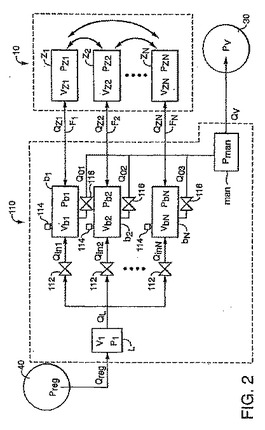
図2は、それぞれi本の導管Fi(i=1,...,N)を介してi個のエンクロージャbiに接続可能な複数iの区画を示し、各区画iにおける圧力は、各エンクロージャiに対して流入および流出し、各導管iを介して各区画iに流入する流体の流量を制御することによって規制する。また、図2は、本開示において説明する圧力制御システムの一実施形態において用いられる圧力測定および流体制御システムも示す。
【0018】
図2に示すように、図1のブロック10内部に示す遠隔区画Ziは、各々、複数の導管Fi(i=1,...,N)を介して、複数のエンクロージャbiにそれぞれ接続可能とするとよい。圧力測定および流体制御システム110は、複数iのエンクロージャ即ち測定チェンバ「bi」を含み、ここでi=1〜Nは、遠隔区画Ziの数に対応する。各測定チェンバbiは、biに流入する流体の入力流速を規制するように構成されている入口弁112と、biから流出する流体の出力流量を規制するように構成されている出口弁116とを含む。各測定チェンバbiは、加圧流体源40から入口マニフォルド「L」を介してエンクロージャbiの入口弁112に進入し、エンクロージャbiの出口弁116から流量制約マニフォルド(図2において「man」で示す)を介して真空排気装置30に至る流体流ラインに沿って配置されている。圧力センサ114(通例、変換器)は、bi内部の圧力を測定するために、各測定チェンバbjに動作的に接続されている。
【0019】
先に説明したように、全ての区画Ziは、1つの加圧流体源40に繋がれて加圧され、1つの真空排気機構30に達する。一実施形態では、流量制約マニフォルドは、ベンチュリ・マニフォルドとするとよいが、他の形式の流量絞りを用いてもよい。遠隔区画Zi(図2のブロック10内部に示す)は、剛直な壁または可撓性のある壁を有することができ、結合しても、結合しなくてもよい。可撓性のある壁を有する遠隔区画は、拡大および縮小可能な体積を有することができる。可撓性のある壁を有する区画の体積は、互いに相互作用する、例えば、互いに対して押し合う可能性もある。
【0020】
種々の区画Zi間の結合は、多数の方法で行うことができる。可撓性のある壁を有する(したがって、拡大および縮小が可能な)区画における体積結合(volumetric coupling)は、体積の拡大/縮小および体積間相互作用によって発生する場合がある。相互作用は、例えば、一方の区画が拡大して他方の区画に押し入ることにより後者の区画内部における圧力が上昇することによって発生する可能性がある。
【0021】
排気装置における出口結合は、真空圧力レベルが変動する場合に発生し、出口流量を変化させ、極端な場合には、絞った状態と絞っていない状態との間で流体が推移する結果となる可能性がある。これは、特に、大流量がベンチュリ管内に流入するベンチュリ・ポンプの場合に、危機的となる虞れがある。この場合、区画の壁は剛直でも可撓性でもよい。
【0022】
入口結合は、1つの区画における設定点が十分に高く、そのマニフォルドに大量の突入流量が生じ、ライン圧力の低下、即ち、減衰挙動(transient behavior)が生ずるようなときに発生する可能性がある。このライン圧力低下は、加圧流体源に繋がれている全ての他の区画に影響を及ぼす虞れがある。この場合も、区画の壁は剛直でも可撓性でもよい。
【0023】
区画が1つしかなく、壁が剛直なシステムは、「非結合、単一区画システム」と見なすことができる。このような剛直区画が多数あり、独立した入口で繋がれ、独立した排気装置に到達する場合は、「非結合、多区画システム」の一例と考えられる。拡大および縮小が可能な可撓性壁を有する1つの区画は、「結合、単一区画システム」と見なすことができる。図1および図2に示す例示的実施形態は、「結合、多区画システム」であり、入口、出口、および体積結合に基づいて、結合のレベルを定量化することができる。
【0024】
区画圧力推定部120は、圧力センサ114の圧力測定値、各エンクロージャ(例えば、測定チェンバ)および各区画の物理パラメータ、ならびにモデルに基づくアルゴリズム(以下で説明する)を用いて区画Ziの圧力を精度高く推定することにより、区画Ziの各々における圧力を推定することができる。直接的な結果として、区画Zi内における圧力を制御する閉ループにおいて区画圧力推定部120を用いる圧力制御システムは、区画Zi自体では発生し得ない、測定チェンバ内における局在化した圧力減衰を克服することができる。このように、圧力制御システムの閉ループ制御性能は、著しく改善することができる。
【0025】
区画圧力推定部120は、高度制御システムに容易に一体化することができ、入口圧力/流、出口圧力/流、および区画体積相互作用の静的および/または動的結合を呈する多数の区画Ziを補償することができる。区画圧力推定部120は、遠隔区画Ziの大きさや容積には制約を設けない。区画圧力推定部120は、異なる範囲の圧力設定点に有効であり、高度制御システムに組み込むと、一貫した減衰および定常状態挙動を確保する。
(制御アルゴリズム)
制御部130は、i個の区画の各々について圧力設定点を受け取り、区画圧力推定部120からi個の区画の各々について区画圧力推定値を受け取り、区画iに接続されている測定チェンバに流入および流出する流体の流量を制御することにより、入口および出口の比例弁を動作させることによって、圧力設定点に応じて各区画における圧力を規制するように構成されている。
【0026】
先に説明したように、制御部130は、入力流量指令信号をエンクロージャbiの入口比例弁に、そして出力流量指令信号をエンクロージャbiの出口比例弁に送り、エンクロージャiに流入する入力流速、およびエンクロージャbiから流出する出力流速を、入力流量指令信号および出力流量指令信号に応じて、それぞれ制御することができる。
【0027】
先に説明したように、エンクロージャbiの1つ以上について、制御部は、入力流速および出力流速のPI制御を実行することができるが、他の形式の比例弁制御を用いることもできる。PI制御を実施する場合、制御部からエンクロージャiの入口比例弁への入力流量指令信号は、次の式で示される。
【0028】
【数11】

【0029】
そして、制御部からエンクロージャbiの出口比例弁への出力流量指令信号は、次の式で示される。
【0030】
【数12】
【0031】
上の式で、Qin,iは、エンクロージャiに流入する入力流速を示し、Qout,iは、エンクロージャbiから流出する出力流速を示し、κPinは入力流速に対する比例利得を示し、κlinは入力流速に対する積分利得を示し、κPoutは出力流速に対する比例利得を示し、κIoutは出力流速に対する積分利得を示し、Pz,iは区画Zi内部における推定圧力を示し、Ptは一方の圧力設定点から他方の圧力設定点までの所望の圧力軌跡を示し、Pt-Pz,iは追跡誤差を示す。圧力軌跡Ptは、多項式、および一次以上の微分方程式の解を含むがこれらには限定されない多数の技法を用いて構築することができる。
【0032】
本開示の特定的な実施形態では、PI型制御システムおよび方法について図示し説明するが、多数の変更や修正、例えば、モデルに基づくことができるフィードフォワード項を含めることも、当業者には想起されることが認められよう。したがって、添付した特許請求の範囲は、本開示の真の主旨および範囲に該当するこれらの変更や修正全てを包含することを意図するものとする。
【0033】
各区画における圧力を推定するために区画圧力推定部120を動作させる際に用いられるモデルに基づく計算方法の一例について、以下に説明する。このモデルに基づく計算方法は、測定チェンバの動力学、ならびに遠隔区画Ziの動的および体積結合に基づくことができ、以下に説明する。
(測定チェンバの動力学)
各測定biの有効圧力を次のように定義する。
【0034】
【数13】
【0035】
ここで、Pb,iは、i番目の区画について測定チェンバにおいて圧力変換器114が測定した圧力であり、PSTPは、標準的な温度および圧力(STP)条件における圧力であり、Qin,jは、入力流量を示し、Qo,iおよびQz,iは、出力流量を示す。具体的には、Qo,iはi番目の測定チェンバbiからベンチュリ・マニフォルドまでの流量であり、Qz,iはi番目の区画への流量である。(1)において、Vb,jはj番目の区画に対する測定チェンバbjの体積を示す。
【0036】
流量絞り即ちベンチュリ・マニフォルド「man」の出力流量は、次のように表すことができる。
【0037】
【数14】
【0038】
ここで、dorifice,iは、ベンチュリ・マニフォルドに繋がる測定チェンバにおける固定オリフィスの直径を示し、Pmanは、真空排気装置30に接続されているベンチュリ・マニフォルドにおける圧力を示す。オリフィスを通過する流量は、固定オリフィス間の圧力差に応じて、絞られる場合または絞られない場合がある。
(区画の動力学および体積結合)
各区画Ziへの流量は、以下の動的方程式(ナビエ−ストークの方程式から導出した)によって記述することができる。
【0039】
【数15】
【0040】
ここで、Qz,iおよびPz,iは、i番目の区画への入口流量およびその内部圧力をそれぞれ示し、Ctube,iおよびτtube,iは、測定チェンバbiを区画Ziに接続する導管Fiと関連のある定数である。即ち、Ctube,iは、導管FiのコンダクタンスをSI単位[(m3/s)/(s-Pa)]で表し、τtube,iは、これもSI単位で、導管全域の流量平衡時定数を表す。
【0041】
各区画Zi内部における圧力ダイナミクスは、以下のように記述することができる。
【0042】
【数16】
【0043】
ここで、各区画Ziの体積をVz,iで示し、多数の区画Zi間における結合による動的体積相互作用は、数学的に次のように記述することができる。
【0044】
【数17】
【0045】
ここで、Vz0,iは、標準的な温度および圧力(STP)条件下における各区画の初期体積であり、Tvは、体積拡大/縮小時定数であり、γiiは、拡大/縮小係数を表し、γijは区画iと区画jとの間における結合係数を表す。質量/慣性効果は無視できると仮定すればよい。
(区画圧力推定部)
先に説明したように、制御部130の制御目的は、遠隔区画Zi内部の圧力を規制することである。しかしながら、biの圧力変換器114は、区画Zi内ではなく、測定チェンバbi内に収容されている。図2において見られるように、測定チェンバbiは、導管Fiによって遠隔区画Fiから分離されている。
【0046】
圧力制御アルゴリズムのオブザーバに基づくモデルは、多数の方法で開発することができる。例えば、流量センサ(例えば、風速計、熱系センサ、圧力系センサ等)を用いて、上の式において流量Qz,iを判定することができる。別の手法では、区画流量方程式を離散形態に書き直すことによって、即時流量オブザーバを開発することが考えられる。
【0047】
【数18】
【0048】
ここで、
【0049】
【数19】
【0050】
は、i番目の区画への流量推定値のn番目のサンプルを示し、Pbは流体ライン圧力変換器114が測定した圧力である。
【0051】
次に、(5)における式に対する離散解は、以下のようにして得ることができる。
【0052】
【数20】
【0053】
ここで、
【0054】
【数21】
【0055】
は、i番目の区画に対する体積推定値のn番目のサンプルを示す。上の式に基づいて、圧力推定部120のアルゴリズムを次のように構築する。
【0056】
【数22】
【0057】
ここで、
【0058】
【数23】
【0059】
は、i番目の区画の圧力推定値のn番目のサンプルを示し、
【0060】
【数24】
【0061】
は、(6)において定義した流量推定値から得られ、または利用可能なときに、直接流量測定値Qzと置換することができ、
【0062】
【数25】
【0063】
は、(7)から得られる。
【0064】
要約すると、圧力を制御しようとする遠隔区画の圧力を精度高く推定することにより、遠隔区画における圧力を制御するシステムおよび方法について説明した。これまでに説明した圧力制御システムおよび方法は、CMP機械を含むがこれに限定されない多数の用途において用いることができる。
【0065】
以上、遠隔区画における圧力を制御するシステムおよび方法のある種の実施形態について説明したが、これらの実施形態において暗示する概念は、他の実施形態でも同様に用いられることは言うまでもない。本願の保護は、以下に続く特許請求の範囲のみによって限定されるものとする。
【0066】
これらの特許請求の範囲において、単数である要素に言及する場合、具体的にそのように述べていない限り、「1つだけ」を意味するのではなく「1つ以上」を意味することを意図している。本開示全体を通じて記載されている種々の実施形態の要素と構造的および機能的に等価であり、当業者には周知であるまたは今後周知になる要素は、ここで引用したことにより、明示的に本願にも含まれるものとし、特許請求の範囲に包含されることを意図する。更に、ここに開示したいずれもが、かかる開示が明示的に特許請求の範囲に明記されているか否かには係わらず、公衆(the public)に献呈されることは意図していない。いずれの特許請求の範囲の要素も、当該要素が「するための手段」という句を用いて明示的に明記されていなければ、または方法の請求項の場合、当該要素が「するためのステップ」という句を用いて明記されていなければ、35U.S.C.§112、第6節の既定にしたがって解釈しないこととする。
【図面の簡単な説明】
【0067】
【図1】図1は、本開示における説明の一実施形態による、1つ以上の遠隔区画における圧力を規制する圧力制御システムを示す全体的機能ブロック図である。
【図2】図2は、i個のエンクロージャにi本の導管i(i=1,...,N)を介してそれぞれ接続可能な複数iの区画、ならびに本開示において記載する圧力制御システムの一実施形態において用いられる圧力測定および流体制御システムを詳細に示す。
【技術分野】
【0001】
(関連出願に対する相互引用)
本願は、2004年3月9日に出願され、"System and Method for Controlling Pressure in Remote Zones"(遠隔区画における圧力制御のためのシステム及び方法)と題する同時係属中の米国特許出願第10/796,723号(代理人整理番号MKS−136)の一部係属出願であり、その優先権を主張する。この同時係属中の特許出願第10/796,723号は、本願の譲受人に譲渡されている。
【背景技術】
【0002】
用途の中には、離れて位置する区画内部において圧力を規制することが必要となる場合もある。例えば、一部の機械および機器は、当該機器の動作中加圧または減圧するチェンバを含む場合がある。このような機械の例には、限定する訳ではないが、化学機械研磨(CMP)機械を含むことができる。
【0003】
測定チェンバ内部にある圧力センサは、当該測定チャンバ内部の圧力を計ることができるに過ぎず、センサに対して離れて位置する区画の内部圧力を計るのではない。その結果、測定チェンバ内部に位置する圧力センサによる圧力測定値のみを用いる圧力制御システムは、測定チェンバ内の圧力が遠隔区画における圧力と等しいと仮定しなければならない場合がある。しかしながら、測定チェンバ内の圧力はその区画の圧力とは等しくないことが多い。例えば、測定チェンバ内で局在化した圧力減衰が発生すると、測定チェンバ内の圧力は区画の圧力とは等しくなくなる可能性がある。その結果、圧力制御システムの性能に著しい低下が生ずる可能性がある。
【発明の開示】
【発明が解決しようとする課題】
【0004】
したがって、離れて位置する区画内部における圧力を精度高く制御することができるシステムおよび方法が求められている。
【課題を解決するための手段】
【0005】
区画内部における圧力を遠隔的に制御するシステは、圧力センサと、弁システムと、区画圧力推定部と、制御部とを含む。圧力センサは、導管を介して区画に接続可能であり、当該区画から離れて位置するエンクロージャ(例えば、測定チェンバ)内部の圧力を測定するように構成されている。弁システムは、エンクロージャに流入および流出し、導管を介して区画に達する流体の流量を制御するように構成されている。弁システムは、エンクロージャに流入する流体の入力流速を規制するように構成されている少なくとも1つの入口比例弁と、エンクロージャから流出する流体の出力流速を規制するように構成されている出口比例弁とを含む、弁システムと、区画圧力推定部は、区画内における推定圧力を、圧力センサが測定する圧力の関数として、更に導管の既知の特性の関数として計算するように構成されている。制御部は、入力流量および出力流量を、区画圧力推定部からの推定圧力と区画に対する圧力設定点との関数として制御するように、入口比例弁および出口比例弁を動作させることによって、区画内部の圧力を規制するように構成されている。
【0006】
各エンクロージャiに対して流入および流出し、各導管iを介して各区画iに達する流体の流量を制御することによって、i個のエンクロージャに導管iを介してそれぞれ接続可能なi個の区画の各々の内部における圧力を遠隔的に制御するシステムで(i=1,...,N)について記載する。このシステムは、圧力測定システムと、弁システムと、区画圧力推定部と、制御部とを含む。圧力測定システムは、i個のエンクロージャの各々において、流体の圧力を測定するように構成されている。弁システムは、エンクロージャi毎に、エンクロージャiに流入する流体の入力流速を規制するように構成されている少なくとも1つの入口比例弁と、エンクロージャiから流出する流体の出力流速を規制するように構成されている出口比例弁とを含む。
【0007】
区画圧力推定部は、圧力測定システムに結合されている。区画圧力推定部は、各区画i毎に、圧力測定システムからのエンクロージャiにおける測定圧力を受け取り、区画内における推定圧力を、エンクロージャiにおける測定圧力の関数として、更に導管iおよび区画iの既知の特性の関数として、計算するように構成されている。制御部は、エンクロージャiに流入する流体の入力流速、およびエンクロージャiから流出する流体の出口流速を、区画iに対する圧力設定点と区画圧力推定部からの区画i内部における推定圧力との関数として制御するように、入口比例弁および出口比例弁を動作させることによって、各区画i内部の圧力を制御するように構成されている。
【0008】
各エンクロージャiに対して流入および流出し、各導管iを介して各区画iに達する流体の流量を制御することによって、i個のエンクロージャに導管iを介してそれぞれ接続可能なi個の区画の各々の内部における圧力を遠隔的に制御する方法(i=1,...,N)について記載する。この方法は、i個のエンクロージャの各々において、流体の圧力を測定するステップを含む。更に、この方法は、区画内における推定圧力を、エンクロージャiにおける測定圧力の関数として、更に導管iおよび区画iの既知の特性の関数として、計算するステップを含む。更に、この方法は、区画i毎に、エンクロージャiに流入する流体の入力流速、およびエンクロージャiから流出する流体の出口流速を、区画iに対する圧力設定点と区画i内部における推定圧力との関数として制御するように、入口比例弁および出口比例弁を動作させることによって、各区画i内部の圧力を制御するステップを含む。
【発明を実施するための最良の形態】
【0009】
(詳細な説明)
本開示において、区画という用語は、密閉立体空間(enclosed volume)を意味することとする。圧力を制御すべき各遠隔区画の圧力を精度高く推定する、オブザーバに基づく解決策(observer-based solution)を用いて、遠隔区画における圧力を制御するシステムおよび方法について説明する。圧力制御システムにおいて遠隔区画の推定圧力を用いることによって、閉ループ制御の性能を著しく向上させることができる。例えば、測定チェンバ内では発生するが遠隔区画自体では発生しない局在的圧力低下を克服することができる。
【0010】
図1は、本開示における説明の一実施形態による、1つ以上の遠隔区画Zi(i=1,...,N)における圧力を規制する圧力制御システムを示す機能ブロック図である。図1に見られるように、全ての区画Ziは、1つの加圧流体源40に繋がれて加圧され、1つの真空排気機構30に達する。全体像では、圧力制御システム100は、圧力測定および流体制御システム110(図2に更に詳しく示す)、区画圧力推定部120、および制御部130を含むことができる。
【0011】
圧力制御システム100は、区画圧力推定部120を用いて、各遠隔区画における圧力を離れて制御することができる。導管Fi(図2に示す)を介して区画Ziに接続されているエンクロージャbi内部の測定圧力に基づいて、遠隔区画Zi内部における圧力を推定し、区画圧力推定部120からの推定圧力に基づいてエンクロージャに対する流入および流出を制御する。通例、エンクロージャは、圧力測定チェンバとすればよいが、流体を内部に密閉することができる密閉立体空間であれば、他のいずれの種類でも用いることができる。
【0012】
圧力測定および流体制御システム110は、圧力測定システムと、流体制御システムとを含むことができる。110における圧力測定システムは、例えば、複数の圧力センサを含むことができ、その各々はエンクロージャに接続され、エンクロージャ内部の圧力を測定するように構成されている。110における流体制御システムは、各エンクロージャに対して流入および流出する流体の流速を制御する弁システムを含むことができる。
【0013】
区画圧力推定部120は、圧力測定システムから圧力測定値を受け取ることができ、更にシステム100の物理パラメータを(例えば、顧客、操作者、またはその他の要員)から受けることができる。物理パラメータは、例えば、導管および区画の既知のパラメータを含むことができる。区画圧力推定部120は、更に、圧力測定値および物理パラメータを用いて、以下で更に詳しく説明する計算方法を用いて、区画毎に圧力推定値を計算し供給するように構成することができる。
【0014】
また、制御部130は、遠隔区画Ziの各々について圧力設定点を受け取ることができ、区画圧力推定値(区画圧力推定部120から)および圧力設定点を用いて、流体制御システムを制御することができる。即ち、制御部130は、各区画内部における圧力が圧力設定点に応じて規制されるように、各エンクロージャに対して流入および流出する流体の流速を弁システムによって制御することができる。
【0015】
図示した実施形態では、弁システムは、エンクロージャ毎に、エンクロージャに入る流体の入力流速を規制するように構成されている入口比例弁と、エンクロージャから出てくる流体の出力流速を規制するように構成されている出口比例弁とを含むことができる。制御部130は、区画出力推定部からの推定圧力および圧力設定点の関数として入力流速および出力流速を制御するように、入口比例弁および出口比例弁を動作させることによって、各区画内部の圧力を規制するように構成することができる。
【0016】
図1に模式的に示すように、制御部130は、入力流量(input flow)指令信号および出力流量(output flow)指令信号をブロック110内部の弁システムに送り(図2において更に詳しく説明する)、入力流速(input flow rate)および出力流速(output flow rate)を、それぞれ、入力流量指令信号および出力流量指令信号に応じて制御することができる。一実施形態例では、制御部は、各エンクロージャに対する入力流速および出力流速のPI(比例−積分)制御(以下で更に詳しく説明する)を実行するように構成することができるが、他の制御方法を用いてもよい。本制御システムおよび方法は、比例および積分(PI)型制御システムならびに方法として説明するが、他の多くの形式の制御システムおよび方法も用いることができ、限定ではなく、比例、積分、比例および微分(PD)、ならびに比例および積分および部分(PID)型のフィードバック制御システムおよび方法を含む。
【0017】
図2は、それぞれi本の導管Fi(i=1,...,N)を介してi個のエンクロージャbiに接続可能な複数iの区画を示し、各区画iにおける圧力は、各エンクロージャiに対して流入および流出し、各導管iを介して各区画iに流入する流体の流量を制御することによって規制する。また、図2は、本開示において説明する圧力制御システムの一実施形態において用いられる圧力測定および流体制御システムも示す。
【0018】
図2に示すように、図1のブロック10内部に示す遠隔区画Ziは、各々、複数の導管Fi(i=1,...,N)を介して、複数のエンクロージャbiにそれぞれ接続可能とするとよい。圧力測定および流体制御システム110は、複数iのエンクロージャ即ち測定チェンバ「bi」を含み、ここでi=1〜Nは、遠隔区画Ziの数に対応する。各測定チェンバbiは、biに流入する流体の入力流速を規制するように構成されている入口弁112と、biから流出する流体の出力流量を規制するように構成されている出口弁116とを含む。各測定チェンバbiは、加圧流体源40から入口マニフォルド「L」を介してエンクロージャbiの入口弁112に進入し、エンクロージャbiの出口弁116から流量制約マニフォルド(図2において「man」で示す)を介して真空排気装置30に至る流体流ラインに沿って配置されている。圧力センサ114(通例、変換器)は、bi内部の圧力を測定するために、各測定チェンバbjに動作的に接続されている。
【0019】
先に説明したように、全ての区画Ziは、1つの加圧流体源40に繋がれて加圧され、1つの真空排気機構30に達する。一実施形態では、流量制約マニフォルドは、ベンチュリ・マニフォルドとするとよいが、他の形式の流量絞りを用いてもよい。遠隔区画Zi(図2のブロック10内部に示す)は、剛直な壁または可撓性のある壁を有することができ、結合しても、結合しなくてもよい。可撓性のある壁を有する遠隔区画は、拡大および縮小可能な体積を有することができる。可撓性のある壁を有する区画の体積は、互いに相互作用する、例えば、互いに対して押し合う可能性もある。
【0020】
種々の区画Zi間の結合は、多数の方法で行うことができる。可撓性のある壁を有する(したがって、拡大および縮小が可能な)区画における体積結合(volumetric coupling)は、体積の拡大/縮小および体積間相互作用によって発生する場合がある。相互作用は、例えば、一方の区画が拡大して他方の区画に押し入ることにより後者の区画内部における圧力が上昇することによって発生する可能性がある。
【0021】
排気装置における出口結合は、真空圧力レベルが変動する場合に発生し、出口流量を変化させ、極端な場合には、絞った状態と絞っていない状態との間で流体が推移する結果となる可能性がある。これは、特に、大流量がベンチュリ管内に流入するベンチュリ・ポンプの場合に、危機的となる虞れがある。この場合、区画の壁は剛直でも可撓性でもよい。
【0022】
入口結合は、1つの区画における設定点が十分に高く、そのマニフォルドに大量の突入流量が生じ、ライン圧力の低下、即ち、減衰挙動(transient behavior)が生ずるようなときに発生する可能性がある。このライン圧力低下は、加圧流体源に繋がれている全ての他の区画に影響を及ぼす虞れがある。この場合も、区画の壁は剛直でも可撓性でもよい。
【0023】
区画が1つしかなく、壁が剛直なシステムは、「非結合、単一区画システム」と見なすことができる。このような剛直区画が多数あり、独立した入口で繋がれ、独立した排気装置に到達する場合は、「非結合、多区画システム」の一例と考えられる。拡大および縮小が可能な可撓性壁を有する1つの区画は、「結合、単一区画システム」と見なすことができる。図1および図2に示す例示的実施形態は、「結合、多区画システム」であり、入口、出口、および体積結合に基づいて、結合のレベルを定量化することができる。
【0024】
区画圧力推定部120は、圧力センサ114の圧力測定値、各エンクロージャ(例えば、測定チェンバ)および各区画の物理パラメータ、ならびにモデルに基づくアルゴリズム(以下で説明する)を用いて区画Ziの圧力を精度高く推定することにより、区画Ziの各々における圧力を推定することができる。直接的な結果として、区画Zi内における圧力を制御する閉ループにおいて区画圧力推定部120を用いる圧力制御システムは、区画Zi自体では発生し得ない、測定チェンバ内における局在化した圧力減衰を克服することができる。このように、圧力制御システムの閉ループ制御性能は、著しく改善することができる。
【0025】
区画圧力推定部120は、高度制御システムに容易に一体化することができ、入口圧力/流、出口圧力/流、および区画体積相互作用の静的および/または動的結合を呈する多数の区画Ziを補償することができる。区画圧力推定部120は、遠隔区画Ziの大きさや容積には制約を設けない。区画圧力推定部120は、異なる範囲の圧力設定点に有効であり、高度制御システムに組み込むと、一貫した減衰および定常状態挙動を確保する。
(制御アルゴリズム)
制御部130は、i個の区画の各々について圧力設定点を受け取り、区画圧力推定部120からi個の区画の各々について区画圧力推定値を受け取り、区画iに接続されている測定チェンバに流入および流出する流体の流量を制御することにより、入口および出口の比例弁を動作させることによって、圧力設定点に応じて各区画における圧力を規制するように構成されている。
【0026】
先に説明したように、制御部130は、入力流量指令信号をエンクロージャbiの入口比例弁に、そして出力流量指令信号をエンクロージャbiの出口比例弁に送り、エンクロージャiに流入する入力流速、およびエンクロージャbiから流出する出力流速を、入力流量指令信号および出力流量指令信号に応じて、それぞれ制御することができる。
【0027】
先に説明したように、エンクロージャbiの1つ以上について、制御部は、入力流速および出力流速のPI制御を実行することができるが、他の形式の比例弁制御を用いることもできる。PI制御を実施する場合、制御部からエンクロージャiの入口比例弁への入力流量指令信号は、次の式で示される。
【0028】
【数11】
【0029】
そして、制御部からエンクロージャbiの出口比例弁への出力流量指令信号は、次の式で示される。
【0030】
【数12】
【0031】
上の式で、Qin,iは、エンクロージャiに流入する入力流速を示し、Qout,iは、エンクロージャbiから流出する出力流速を示し、κPinは入力流速に対する比例利得を示し、κlinは入力流速に対する積分利得を示し、κPoutは出力流速に対する比例利得を示し、κIoutは出力流速に対する積分利得を示し、Pz,iは区画Zi内部における推定圧力を示し、Ptは一方の圧力設定点から他方の圧力設定点までの所望の圧力軌跡を示し、Pt-Pz,iは追跡誤差を示す。圧力軌跡Ptは、多項式、および一次以上の微分方程式の解を含むがこれらには限定されない多数の技法を用いて構築することができる。
【0032】
本開示の特定的な実施形態では、PI型制御システムおよび方法について図示し説明するが、多数の変更や修正、例えば、モデルに基づくことができるフィードフォワード項を含めることも、当業者には想起されることが認められよう。したがって、添付した特許請求の範囲は、本開示の真の主旨および範囲に該当するこれらの変更や修正全てを包含することを意図するものとする。
【0033】
各区画における圧力を推定するために区画圧力推定部120を動作させる際に用いられるモデルに基づく計算方法の一例について、以下に説明する。このモデルに基づく計算方法は、測定チェンバの動力学、ならびに遠隔区画Ziの動的および体積結合に基づくことができ、以下に説明する。
(測定チェンバの動力学)
各測定biの有効圧力を次のように定義する。
【0034】
【数13】
【0035】
ここで、Pb,iは、i番目の区画について測定チェンバにおいて圧力変換器114が測定した圧力であり、PSTPは、標準的な温度および圧力(STP)条件における圧力であり、Qin,jは、入力流量を示し、Qo,iおよびQz,iは、出力流量を示す。具体的には、Qo,iはi番目の測定チェンバbiからベンチュリ・マニフォルドまでの流量であり、Qz,iはi番目の区画への流量である。(1)において、Vb,jはj番目の区画に対する測定チェンバbjの体積を示す。
【0036】
流量絞り即ちベンチュリ・マニフォルド「man」の出力流量は、次のように表すことができる。
【0037】
【数14】
【0038】
ここで、dorifice,iは、ベンチュリ・マニフォルドに繋がる測定チェンバにおける固定オリフィスの直径を示し、Pmanは、真空排気装置30に接続されているベンチュリ・マニフォルドにおける圧力を示す。オリフィスを通過する流量は、固定オリフィス間の圧力差に応じて、絞られる場合または絞られない場合がある。
(区画の動力学および体積結合)
各区画Ziへの流量は、以下の動的方程式(ナビエ−ストークの方程式から導出した)によって記述することができる。
【0039】
【数15】
【0040】
ここで、Qz,iおよびPz,iは、i番目の区画への入口流量およびその内部圧力をそれぞれ示し、Ctube,iおよびτtube,iは、測定チェンバbiを区画Ziに接続する導管Fiと関連のある定数である。即ち、Ctube,iは、導管FiのコンダクタンスをSI単位[(m3/s)/(s-Pa)]で表し、τtube,iは、これもSI単位で、導管全域の流量平衡時定数を表す。
【0041】
各区画Zi内部における圧力ダイナミクスは、以下のように記述することができる。
【0042】
【数16】
【0043】
ここで、各区画Ziの体積をVz,iで示し、多数の区画Zi間における結合による動的体積相互作用は、数学的に次のように記述することができる。
【0044】
【数17】
【0045】
ここで、Vz0,iは、標準的な温度および圧力(STP)条件下における各区画の初期体積であり、Tvは、体積拡大/縮小時定数であり、γiiは、拡大/縮小係数を表し、γijは区画iと区画jとの間における結合係数を表す。質量/慣性効果は無視できると仮定すればよい。
(区画圧力推定部)
先に説明したように、制御部130の制御目的は、遠隔区画Zi内部の圧力を規制することである。しかしながら、biの圧力変換器114は、区画Zi内ではなく、測定チェンバbi内に収容されている。図2において見られるように、測定チェンバbiは、導管Fiによって遠隔区画Fiから分離されている。
【0046】
圧力制御アルゴリズムのオブザーバに基づくモデルは、多数の方法で開発することができる。例えば、流量センサ(例えば、風速計、熱系センサ、圧力系センサ等)を用いて、上の式において流量Qz,iを判定することができる。別の手法では、区画流量方程式を離散形態に書き直すことによって、即時流量オブザーバを開発することが考えられる。
【0047】
【数18】
【0048】
ここで、
【0049】
【数19】
【0050】
は、i番目の区画への流量推定値のn番目のサンプルを示し、Pbは流体ライン圧力変換器114が測定した圧力である。
【0051】
次に、(5)における式に対する離散解は、以下のようにして得ることができる。
【0052】
【数20】
【0053】
ここで、
【0054】
【数21】
【0055】
は、i番目の区画に対する体積推定値のn番目のサンプルを示す。上の式に基づいて、圧力推定部120のアルゴリズムを次のように構築する。
【0056】
【数22】
【0057】
ここで、
【0058】
【数23】
【0059】
は、i番目の区画の圧力推定値のn番目のサンプルを示し、
【0060】
【数24】
【0061】
は、(6)において定義した流量推定値から得られ、または利用可能なときに、直接流量測定値Qzと置換することができ、
【0062】
【数25】
【0063】
は、(7)から得られる。
【0064】
要約すると、圧力を制御しようとする遠隔区画の圧力を精度高く推定することにより、遠隔区画における圧力を制御するシステムおよび方法について説明した。これまでに説明した圧力制御システムおよび方法は、CMP機械を含むがこれに限定されない多数の用途において用いることができる。
【0065】
以上、遠隔区画における圧力を制御するシステムおよび方法のある種の実施形態について説明したが、これらの実施形態において暗示する概念は、他の実施形態でも同様に用いられることは言うまでもない。本願の保護は、以下に続く特許請求の範囲のみによって限定されるものとする。
【0066】
これらの特許請求の範囲において、単数である要素に言及する場合、具体的にそのように述べていない限り、「1つだけ」を意味するのではなく「1つ以上」を意味することを意図している。本開示全体を通じて記載されている種々の実施形態の要素と構造的および機能的に等価であり、当業者には周知であるまたは今後周知になる要素は、ここで引用したことにより、明示的に本願にも含まれるものとし、特許請求の範囲に包含されることを意図する。更に、ここに開示したいずれもが、かかる開示が明示的に特許請求の範囲に明記されているか否かには係わらず、公衆(the public)に献呈されることは意図していない。いずれの特許請求の範囲の要素も、当該要素が「するための手段」という句を用いて明示的に明記されていなければ、または方法の請求項の場合、当該要素が「するためのステップ」という句を用いて明記されていなければ、35U.S.C.§112、第6節の既定にしたがって解釈しないこととする。
【図面の簡単な説明】
【0067】
【図1】図1は、本開示における説明の一実施形態による、1つ以上の遠隔区画における圧力を規制する圧力制御システムを示す全体的機能ブロック図である。
【図2】図2は、i個のエンクロージャにi本の導管i(i=1,...,N)を介してそれぞれ接続可能な複数iの区画、ならびに本開示において記載する圧力制御システムの一実施形態において用いられる圧力測定および流体制御システムを詳細に示す。
【特許請求の範囲】
【請求項1】
区画内部における圧力を遠隔的に制御するシステムであって、
導管を介して区画に接続可能であり、当該区画から離れて位置するエンクロージャ内部の圧力を測定するように構成されている圧力センサと、
前記エンクロージャに流入および流出し、前記導管を介して前記区画に達する流体の流量を制御するように構成されている弁システムであって、前記エンクロージャに流入する流体の入力流速を規制するように構成されている少なくとも1つの入口比例弁と、前記エンクロージャから流出する流体の出力流速を規制するように構成されている出口比例弁とを含む、弁システムと、
前記区画内における推定圧力を、前記圧力センサが測定する圧力の関数として、更に前記導管の既知の特性の関数として計算するように構成されている区画圧力推定部と、
前記入力流量および前記出力流量を、前記区画圧力推定部からの推定圧力と前記区画に対する圧力設定点との関数として制御するように、前記入口比例弁および前記出口比例弁を動作させることによって、前記区画内部の圧力を規制するように構成されている制御部と、
を備えている、システム。
【請求項2】
請求項1記載のシステムにおいて、
前記制御部は、更に、前記入力流量指令信号と前記出力流量指令信号とに応じて、前記入力流速および前記出力流速をそれぞれ制御するように、前記入口比例弁に入力流量指令信号を送り、前記出力比例弁に出力流用指令信号を送るように構成されている、システム。
【請求項3】
請求項1記載のシステムにおいて、
前記制御部は、更に、前記入力流速および前記出力力流速のPI(比例−積分)制御を実行するように構成されており、
前記入力流量指令信号は、
【数1】
によって示され、
前記出力流用指令信号は、
【数2】
によって示され、
Qinは、入力流速を示し、
Qoutは、出力流速を示し、
κPinは、入力流速に対する比例利得を示し、
κIinは、入力粒食に対する積分利得を示し、
κPoutは、出力流速に対する比例利得を示し、
κIoutは、出力流速に対する積分利得を示し、
Pzは、前記区画内における推定圧力を示し、
Ptは、前記圧力設定点の圧力軌跡を示し、
Pt-Pzは、追跡誤差である、システム。
【請求項4】
請求項1記載のシステムであって、更に、前記入口比例弁に接続されている加圧流体源と、前記出口比例弁に接続されている真空排気装置とを備えている、システム。
【請求項5】
請求項4記載のシステムであって、更に、前記出口比例弁と前記真空排気装置との間に、流量絞りを備えている、システム。
【請求項6】
請求項1記載のシステムにおいて、前記区画は可撓性の壁を有し、前記区画圧力推定部は、更に、前記エンクロージャ内部における推定圧力を計算するように、前記区画の推定体積を、前記導管の既知の特性と前記圧力センサが測定する圧力との関数として計算するように構成されている、システム。
【請求項7】
各エンクロージャiに対して流入および流出し、各導管iを介して各区画iに達する流体の流量を制御することによって、i個のエンクロージャに導管iを介してそれぞれ接続可能なi個の区画の各々の内部における圧力を遠隔的に制御するシステムであって、i=1,...,Nであり、
前記i個のエンクロージャの各々において、前記流体の圧力を測定するように構成されている圧力測定システムと、
エンクロージャi毎に、該エンクロージャiに流入する流体の入力流速を規制するように構成されている少なくとも1つの入口比例弁と、前記エンクロージャiから流出する流体の出力流速を規制するように構成されている出口比例弁とを含む、弁システムと、
前記圧力測定システムに結合され、区画i毎に、前記圧力測定システムからの前記エンクロージャiにおける測定圧力を受け取り、前記区画内における推定圧力を、前記エンクロージャiにおける測定圧力の関数として、更に前記導管iおよび前記区画iの既知の特性の関数として、計算するように構成されている区画圧力推定部と、
前記エンクロージャiに流入する流体の入力流速、および前記エンクロージャiから流出する流体の出口流速を、前記区画iに対する圧力設定点と前記区画圧力推定部からの前記区画i内部における推定圧力との関数として制御するように、前記入口比例弁および前記出口比例弁を動作させることによって、前記各区画i内部の圧力を制御するように構成されている制御部と、
を備えている、システム。
【請求項8】
請求項7記載のシステムにおいて、
前記圧力測定システムは、複数の圧力センサを備えており、該圧力センサの各々は、前記i個のエンクロージャ内部の圧力を測定するようにそれぞれ接続されている、システム。
【請求項9】
請求項7記載のシステムにおいて、
区画i毎に、前記制御部は、更に、前記入力流量指令信号と前記出力流量指令信号とに応じて、前記エンクロージャiに流入する前記入力流速および前記件クロージャiから流出する前記出力流速をそれぞれ制御するように、エンクロージャiの前記入口比例弁に入力流量指令信号を送り、エンクロージャiの前記出力比例弁に出力流用指令信号を送るように構成されている、システム。
【請求項10】
請求項7記載のシステムにおいて、
前記エンクロージャiの少なくとも1つについて、前記制御部は、更に、前記少なくとも1つのエンクロージャの前記入力流速および前記出力力流速のPI(比例−積分)制御を実行するように構成されており、
前記制御部からエンクロージャiの前記入口比例弁への前記入力流量指令信号は、
【数3】
によって示され、
前記制御部からエンクロージャiの前記出口比例弁への前記出力流用指令信号は、
【数4】
によって示され、
Qin,iは、エンクロージャiへの入力流速を示し、
Qout,iは、エンクロージャからの出力流速を示し、
κPinは、入力流速に対する比例利得を示し、
κIinは、入力粒食に対する積分利得を示し、
κPoutは、出力流速に対する比例利得を示し、
κIoutは、出力流速に対する積分利得を示し、
Pzは、前記区画内における推定圧力を示し、
Ptは、前記圧力設定点の圧力軌跡を示し、
Pt-Pzは、追跡誤差である、システム。
【請求項11】
請求項7記載のシステムであって、更に、前記i個のエンクロージャの前記入口比例弁に接続されている加圧流体源と、前記i個のエンクロージャの前記出口比例弁に接続されている真空排気装置とを備えている、システム。
【請求項12】
請求項11記載のシステムであって、更に、各出口比例弁と前記真空排気装置との間に、流量絞りを備えている、システム。
【請求項13】
請求項11記載のシステムであって、更に、前記加圧流体源と前記入口比例弁との間に圧力マニフォルドを備えている、システム。
【請求項14】
請求項12記載のシステムにおいて、前記流量絞りは、ベンチュリを備えている、システム。
【請求項15】
請求項7記載のシステムにおいて、前記i個の区画の少なくとも一部は、剛直な壁を有する、システム。
【請求項16】
請求項7記載のシステムにおいて、前記i個の区画の少なくとも一部は、可撓性のある壁を有し、該可撓性のある壁を有する区画が拡大および縮小可能となっている、システム。
【請求項17】
請求項16記載のシステムにおいて、前記区画圧力推定部は、更に、可撓性のある壁を有する前記区画に接続されているエンクロージャ内部における推定圧力を計算するように、前記可撓性のある壁を有する区画の各々の推定体積を計算するように構成されている、システム。
【請求項18】
請求項7記載のシステムにおいて、前記i個の区画の少なくとも一部は結合されている、システム。
【請求項19】
請求項7記載のシステムにおいて、前記i個の区画の少なくとも一部は結合されていない、システム。
【請求項20】
請求項8記載のシステムにおいて、
前記i個の区画の少なくとも一部は、可撓性のある壁を有し、該可撓性のある壁を有する区画が拡大および縮小可能となっており、
前記i個の区画の少なくとも一部は結合されており、
前記i本の導管の既知の特性は、ラインiを区画iに接続する各導管iと関連のある定数Ctube,iおよびτtube,iと、前記導管のコンダクタンスを表すCtube,iと、前記導管全域における流量平衡時定数を表すτtube,iとを含み、
前記i個の区画の既知の特性は、STP(標準的温度および圧力)条件下における各区画iの初期体積(Vz0,i)と、体積拡大/収縮時定数(Tv)と、区画iの拡大/縮小係数(γii)と、区画iと区画jとの間の結合係数(γij)とを含み、j=1,...,Nである、システム。
【請求項21】
請求項20記載のシステムにおいて、区画i毎に、前記区画圧力推定部は、前記区画iの推定圧力のn番目のサンプル、
【数5】
と、前記区画iの推定体積のn番目のサンプル
【数6】
と前記エンクロージャiに流入する推定入力流速のn番目のサンプル
【数7】
とを計算するようにプログラムされており、
ここで、
【数8】
【数9】
【数10】
であり、
Pbiは、エンクロージャiに接続されている前記圧力センサが測定する圧力を示し、
Qziは、前記エンクロージャiに流入する流体の入力流速Qin,iと前記エンクロージャiから流出する出力流速Qout,iとの間の差によって与えられる、前記区画iに流入する流体の入力流速を示す、システム。
【請求項22】
請求項21のシステムを含む機械であって、更に、前記i個のエンクロージャにそれぞれ接続されている、前記i個の区画を含む、機械。
【請求項23】
請求項22記載の機械であって、更に、前記i個の区画を内包するCMPキャリア・ヘッドを備えている、機械。
【請求項24】
各エンクロージャiに対して流入および流出し、各導管iを介して各区画iに達する流体の流量を制御することによって、i個のエンクロージャに導管iを介してそれぞれ接続可能なi個の区画の各々の内部における圧力を遠隔的に制御する方法であって、i=1,...,Nであり、
前記i個のエンクロージャの各々において、前記流体の圧力を測定するステップと、
前記区画内における推定圧力を、前記エンクロージャiにおける測定圧力の関数として、更に前記導管iおよび前記区画iの既知の特性の関数として、計算するステップと、
区画i毎に、前記エンクロージャiに流入する流体の入力流速、および前記エンクロージャiから流出する流体の出口流速を、前記区画iに対する圧力設定点と前記区画i内部における推定圧力との関数として制御するように、入口比例弁および出口比例弁を動作させることによって、前記各区画i内部の圧力を制御するステップと、
を備えている、方法。
【請求項1】
区画内部における圧力を遠隔的に制御するシステムであって、
導管を介して区画に接続可能であり、当該区画から離れて位置するエンクロージャ内部の圧力を測定するように構成されている圧力センサと、
前記エンクロージャに流入および流出し、前記導管を介して前記区画に達する流体の流量を制御するように構成されている弁システムであって、前記エンクロージャに流入する流体の入力流速を規制するように構成されている少なくとも1つの入口比例弁と、前記エンクロージャから流出する流体の出力流速を規制するように構成されている出口比例弁とを含む、弁システムと、
前記区画内における推定圧力を、前記圧力センサが測定する圧力の関数として、更に前記導管の既知の特性の関数として計算するように構成されている区画圧力推定部と、
前記入力流量および前記出力流量を、前記区画圧力推定部からの推定圧力と前記区画に対する圧力設定点との関数として制御するように、前記入口比例弁および前記出口比例弁を動作させることによって、前記区画内部の圧力を規制するように構成されている制御部と、
を備えている、システム。
【請求項2】
請求項1記載のシステムにおいて、
前記制御部は、更に、前記入力流量指令信号と前記出力流量指令信号とに応じて、前記入力流速および前記出力流速をそれぞれ制御するように、前記入口比例弁に入力流量指令信号を送り、前記出力比例弁に出力流用指令信号を送るように構成されている、システム。
【請求項3】
請求項1記載のシステムにおいて、
前記制御部は、更に、前記入力流速および前記出力力流速のPI(比例−積分)制御を実行するように構成されており、
前記入力流量指令信号は、
【数1】
によって示され、
前記出力流用指令信号は、
【数2】
によって示され、
Qinは、入力流速を示し、
Qoutは、出力流速を示し、
κPinは、入力流速に対する比例利得を示し、
κIinは、入力粒食に対する積分利得を示し、
κPoutは、出力流速に対する比例利得を示し、
κIoutは、出力流速に対する積分利得を示し、
Pzは、前記区画内における推定圧力を示し、
Ptは、前記圧力設定点の圧力軌跡を示し、
Pt-Pzは、追跡誤差である、システム。
【請求項4】
請求項1記載のシステムであって、更に、前記入口比例弁に接続されている加圧流体源と、前記出口比例弁に接続されている真空排気装置とを備えている、システム。
【請求項5】
請求項4記載のシステムであって、更に、前記出口比例弁と前記真空排気装置との間に、流量絞りを備えている、システム。
【請求項6】
請求項1記載のシステムにおいて、前記区画は可撓性の壁を有し、前記区画圧力推定部は、更に、前記エンクロージャ内部における推定圧力を計算するように、前記区画の推定体積を、前記導管の既知の特性と前記圧力センサが測定する圧力との関数として計算するように構成されている、システム。
【請求項7】
各エンクロージャiに対して流入および流出し、各導管iを介して各区画iに達する流体の流量を制御することによって、i個のエンクロージャに導管iを介してそれぞれ接続可能なi個の区画の各々の内部における圧力を遠隔的に制御するシステムであって、i=1,...,Nであり、
前記i個のエンクロージャの各々において、前記流体の圧力を測定するように構成されている圧力測定システムと、
エンクロージャi毎に、該エンクロージャiに流入する流体の入力流速を規制するように構成されている少なくとも1つの入口比例弁と、前記エンクロージャiから流出する流体の出力流速を規制するように構成されている出口比例弁とを含む、弁システムと、
前記圧力測定システムに結合され、区画i毎に、前記圧力測定システムからの前記エンクロージャiにおける測定圧力を受け取り、前記区画内における推定圧力を、前記エンクロージャiにおける測定圧力の関数として、更に前記導管iおよび前記区画iの既知の特性の関数として、計算するように構成されている区画圧力推定部と、
前記エンクロージャiに流入する流体の入力流速、および前記エンクロージャiから流出する流体の出口流速を、前記区画iに対する圧力設定点と前記区画圧力推定部からの前記区画i内部における推定圧力との関数として制御するように、前記入口比例弁および前記出口比例弁を動作させることによって、前記各区画i内部の圧力を制御するように構成されている制御部と、
を備えている、システム。
【請求項8】
請求項7記載のシステムにおいて、
前記圧力測定システムは、複数の圧力センサを備えており、該圧力センサの各々は、前記i個のエンクロージャ内部の圧力を測定するようにそれぞれ接続されている、システム。
【請求項9】
請求項7記載のシステムにおいて、
区画i毎に、前記制御部は、更に、前記入力流量指令信号と前記出力流量指令信号とに応じて、前記エンクロージャiに流入する前記入力流速および前記件クロージャiから流出する前記出力流速をそれぞれ制御するように、エンクロージャiの前記入口比例弁に入力流量指令信号を送り、エンクロージャiの前記出力比例弁に出力流用指令信号を送るように構成されている、システム。
【請求項10】
請求項7記載のシステムにおいて、
前記エンクロージャiの少なくとも1つについて、前記制御部は、更に、前記少なくとも1つのエンクロージャの前記入力流速および前記出力力流速のPI(比例−積分)制御を実行するように構成されており、
前記制御部からエンクロージャiの前記入口比例弁への前記入力流量指令信号は、
【数3】
によって示され、
前記制御部からエンクロージャiの前記出口比例弁への前記出力流用指令信号は、
【数4】
によって示され、
Qin,iは、エンクロージャiへの入力流速を示し、
Qout,iは、エンクロージャからの出力流速を示し、
κPinは、入力流速に対する比例利得を示し、
κIinは、入力粒食に対する積分利得を示し、
κPoutは、出力流速に対する比例利得を示し、
κIoutは、出力流速に対する積分利得を示し、
Pzは、前記区画内における推定圧力を示し、
Ptは、前記圧力設定点の圧力軌跡を示し、
Pt-Pzは、追跡誤差である、システム。
【請求項11】
請求項7記載のシステムであって、更に、前記i個のエンクロージャの前記入口比例弁に接続されている加圧流体源と、前記i個のエンクロージャの前記出口比例弁に接続されている真空排気装置とを備えている、システム。
【請求項12】
請求項11記載のシステムであって、更に、各出口比例弁と前記真空排気装置との間に、流量絞りを備えている、システム。
【請求項13】
請求項11記載のシステムであって、更に、前記加圧流体源と前記入口比例弁との間に圧力マニフォルドを備えている、システム。
【請求項14】
請求項12記載のシステムにおいて、前記流量絞りは、ベンチュリを備えている、システム。
【請求項15】
請求項7記載のシステムにおいて、前記i個の区画の少なくとも一部は、剛直な壁を有する、システム。
【請求項16】
請求項7記載のシステムにおいて、前記i個の区画の少なくとも一部は、可撓性のある壁を有し、該可撓性のある壁を有する区画が拡大および縮小可能となっている、システム。
【請求項17】
請求項16記載のシステムにおいて、前記区画圧力推定部は、更に、可撓性のある壁を有する前記区画に接続されているエンクロージャ内部における推定圧力を計算するように、前記可撓性のある壁を有する区画の各々の推定体積を計算するように構成されている、システム。
【請求項18】
請求項7記載のシステムにおいて、前記i個の区画の少なくとも一部は結合されている、システム。
【請求項19】
請求項7記載のシステムにおいて、前記i個の区画の少なくとも一部は結合されていない、システム。
【請求項20】
請求項8記載のシステムにおいて、
前記i個の区画の少なくとも一部は、可撓性のある壁を有し、該可撓性のある壁を有する区画が拡大および縮小可能となっており、
前記i個の区画の少なくとも一部は結合されており、
前記i本の導管の既知の特性は、ラインiを区画iに接続する各導管iと関連のある定数Ctube,iおよびτtube,iと、前記導管のコンダクタンスを表すCtube,iと、前記導管全域における流量平衡時定数を表すτtube,iとを含み、
前記i個の区画の既知の特性は、STP(標準的温度および圧力)条件下における各区画iの初期体積(Vz0,i)と、体積拡大/収縮時定数(Tv)と、区画iの拡大/縮小係数(γii)と、区画iと区画jとの間の結合係数(γij)とを含み、j=1,...,Nである、システム。
【請求項21】
請求項20記載のシステムにおいて、区画i毎に、前記区画圧力推定部は、前記区画iの推定圧力のn番目のサンプル、
【数5】
と、前記区画iの推定体積のn番目のサンプル
【数6】
と前記エンクロージャiに流入する推定入力流速のn番目のサンプル
【数7】
とを計算するようにプログラムされており、
ここで、
【数8】
【数9】
【数10】
であり、
Pbiは、エンクロージャiに接続されている前記圧力センサが測定する圧力を示し、
Qziは、前記エンクロージャiに流入する流体の入力流速Qin,iと前記エンクロージャiから流出する出力流速Qout,iとの間の差によって与えられる、前記区画iに流入する流体の入力流速を示す、システム。
【請求項22】
請求項21のシステムを含む機械であって、更に、前記i個のエンクロージャにそれぞれ接続されている、前記i個の区画を含む、機械。
【請求項23】
請求項22記載の機械であって、更に、前記i個の区画を内包するCMPキャリア・ヘッドを備えている、機械。
【請求項24】
各エンクロージャiに対して流入および流出し、各導管iを介して各区画iに達する流体の流量を制御することによって、i個のエンクロージャに導管iを介してそれぞれ接続可能なi個の区画の各々の内部における圧力を遠隔的に制御する方法であって、i=1,...,Nであり、
前記i個のエンクロージャの各々において、前記流体の圧力を測定するステップと、
前記区画内における推定圧力を、前記エンクロージャiにおける測定圧力の関数として、更に前記導管iおよび前記区画iの既知の特性の関数として、計算するステップと、
区画i毎に、前記エンクロージャiに流入する流体の入力流速、および前記エンクロージャiから流出する流体の出口流速を、前記区画iに対する圧力設定点と前記区画i内部における推定圧力との関数として制御するように、入口比例弁および出口比例弁を動作させることによって、前記各区画i内部の圧力を制御するステップと、
を備えている、方法。
【図1】

【図2】
【図2】
【公表番号】特表2009−524147(P2009−524147A)
【公表日】平成21年6月25日(2009.6.25)
【国際特許分類】
【出願番号】特願2008−551255(P2008−551255)
【出願日】平成18年11月8日(2006.11.8)
【国際出願番号】PCT/US2006/043692
【国際公開番号】WO2007/123576
【国際公開日】平成19年11月1日(2007.11.1)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
【公表日】平成21年6月25日(2009.6.25)
【国際特許分類】
【出願日】平成18年11月8日(2006.11.8)
【国際出願番号】PCT/US2006/043692
【国際公開番号】WO2007/123576
【国際公開日】平成19年11月1日(2007.11.1)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
[ Back to top ]