
遠隔操作型アクチュエータ
【課題】 アクチュエータ本体の先端に設けられた工具の姿勢を遠隔操作で変更することができ、アクチュエータ本体を確実に支持し、かつ位置および姿勢を正確に変更することができる遠隔操作型アクチュエータを提供する。
【解決手段】 アクチュエータ本体5は、細長形状のスピンドルガイド部3と、その先端に姿勢変更自在に取付けられた先端部材2と、先端部材2に回転自在に設けた工具1と、スピンドルガイド部3の基端が結合された本体基端ハウジング4とを備える。アクチュエータ本体5を支持するリンク作動装置7は、ベース部材6側の入力部材104に対し本体基端ハウジング4側の出力部材105を、3組以上のリンク機構101を介して位置および姿勢を変更可能に連結したものとする。工具回転用駆動源41および姿勢変更用駆動源42の回転力をアクチュエータ本体5へ伝達する可撓性ワイヤ9A,9Bを設ける。
【解決手段】 アクチュエータ本体5は、細長形状のスピンドルガイド部3と、その先端に姿勢変更自在に取付けられた先端部材2と、先端部材2に回転自在に設けた工具1と、スピンドルガイド部3の基端が結合された本体基端ハウジング4とを備える。アクチュエータ本体5を支持するリンク作動装置7は、ベース部材6側の入力部材104に対し本体基端ハウジング4側の出力部材105を、3組以上のリンク機構101を介して位置および姿勢を変更可能に連結したものとする。工具回転用駆動源41および姿勢変更用駆動源42の回転力をアクチュエータ本体5へ伝達する可撓性ワイヤ9A,9Bを設ける。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、工具の姿勢を遠隔操作で変更可能で、医療用、機械加工等の用途で用いられる遠隔操作型アクチュエータに関する。
【背景技術】
【0002】
医療用として骨の加工に用いられたり、機械加工用としてドリル加工や切削加工に用いられたりする遠隔操作型アクチュエータがある。遠隔操作型アクチュエータは、直線形状や湾曲形状をした細長いパイプ部の先端に設けた工具を遠隔操作で制御する。ただし、従来の遠隔操作用アクチュエータは、工具の回転のみを遠隔操作で制御するだけであったため、医療用の場合、複雑な形状の加工や外からは見えにくい箇所の加工が難しかった。また、ドリル加工では、直線だけではなく、湾曲状の加工が可能なことが求められる。さらに、切削加工では、溝内部の奥まった箇所の加工が可能なことが求められる。以下、医療用を例にとって、遠隔操作型アクチュエータの従来技術と課題について説明する。
【0003】
整形外科分野において、骨の老化等によって擦り減って使えなくなった関節を新しく人工のものに取り替える人工関節置換手術がある。この手術では、患者の生体骨を人工関節が挿入できるように加工する必要があるが、その加工には、術後の生体骨と人工関節との接着強度を高めるために、人工関節の形状に合わせて精度良く加工することが要求される。
【0004】
例えば、股関節の人工関節置換手術では、大腿骨の骨の中心にある髄腔部に人工関節挿入用の穴を形成する。人工関節と骨との接触強度を保つには両者の接触面積を大きくとる必要があり、人工関節挿入用の穴は、骨の奥まで延びた細長い形状に加工される。このような骨の切削加工に用いられる医療用アクチュエータとして、細長いパイプ部の先端に工具を回転自在に設け、パイプ部の基端側に設けたモータ等の回転駆動源の駆動により、パイプ部の内部に配した回転軸を介して工具を回転させる構成のものがある(例えば特許文献1)。この種の医療用アクチュエータは、外部に露出した回転部分は先端の工具のみであるため、工具を骨の奥まで挿入することができる。
【0005】
人工関節置換手術では、皮膚切開や筋肉の切断を伴う。すなわち、人体に傷を付けなければならない。その傷を最小限に抑えるためには、前記パイプ部は真っ直ぐでなく、適度に湾曲している方が良い場合がある。このような状況に対応するためのものとして、次のような従来技術がある。例えば、特許文献2は、パイプ部の中間部を2重に湾曲させて、パイプ部の先端側の軸心位置と基端側の軸心位置とをずらせたものである。このようにパイプ部の軸心位置が先端側と軸心側とでずれているものは、他にも知られている。また、特許文献3は、パイプ部を180度回転させたものである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−301149号公報
【特許文献2】米国特許第4,466,429号明細書
【特許文献3】米国特許第4,265,231号明細書
【特許文献4】特開2001−17446号公報
【特許文献5】米国特許第5,769,092号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
生体骨の人工関節挿入用穴に人工関節を嵌め込んだ状態で、生体骨と人工関節との間に広い隙間があると、術後の接着時間が長くなるため、前記隙間はなるべく狭いのが望ましい。また、生体骨と人工関節の接触面が平滑であることも重要であり、人工関節挿入用穴の加工には高い精度が要求される。しかし、パイプ部がどのような形状であろうとも、工具の動作範囲はパイプ部の形状の制約を受けるため、皮膚切開や筋肉の切断をできるだけ小さくしながら、生体骨と人工関節との間の隙間を狭くかつ両者の接触面が平滑になるように人工関節挿入用穴を加工するのは難しい。
【0008】
一般に、人工関節置換手術が行われる患者の骨は、老化等により強度が弱くなっていることが多く、骨そのものが変形している場合もある。したがって、通常考えられる以上に、人工関節挿入用穴の加工は難しい。
【0009】
そこで、本出願人は、人工関節挿入用穴の加工を比較的容易にかつ精度良く行えるようにすることを目的として、先端に設けた工具の姿勢を遠隔操作で変更可能とすることを試みた。工具の姿勢が変更可能であれば、パイプ部の形状に関係なく、工具を適正な姿勢に保持することができるからである。しかし、工具は細長いパイプ部の先端に設けられているため、工具の姿勢を変更させる機構を設ける上で制約が多く、それを克服するための工夫が必要である。また、パイプ部が湾曲部を有することも予想され、その場合でも確実に姿勢変更動作をさせられることが望まれる。
【0010】
なお、細長いパイプ部を有しない医療用アクチュエータでは、手で握る部分に対して工具が設けられた部分が姿勢変更可能なものがある(例えば特許文献4)が、遠隔操作で工具の姿勢を変更させるものは提案されていない。
【0011】
また、遠隔操作型アクチュエータを人が直接持って操作する場合、手の震え等が被切削物に対する工具の位置決め精度に影響する。そのため、精度良く加工するには、多くの経験が必要である。特に、ガイド部が湾曲形状である場合、ガイド部の先端に設けた工具の位置を予測し難く、操作がより一層に複雑で困難になる。それに伴って、切削時間も長くなる。遠隔操作型アクチュエータを人工関節置換手術の手術用として使用する場合、切削時間が長いと、患者の負担が大きい。
【0012】
そこで、遠隔操作型アクチュエータを、1自由度または2自由度以上の自由度を持つ支持装置で支持される遠隔操作型アクチュエータとした。それにより、手の震え等の悪影響を排除できる。この種の遠隔操作型アクチュエータとしては、例えば特許文献5に記載のものが知られているが、従来のものは、遠隔操作型アクチュエータが工具の姿勢を変更できなかったため、きめ細かな加工ができなかった。
【0013】
この発明は、アクチュエータ本体の先端に設けられた工具の姿勢を遠隔操作で変更することができ、アクチュエータ本体を確実に支持し、かつアクチュエータ本体が軽量で、その位置および姿勢を正確に変更することができる遠隔操作型アクチュエータを提供することを課題としている。
【課題を解決するための手段】
【0014】
この発明にかかる遠隔操作型アクチュエータは、先端に工具を有するアクチュエータ本体を、ベース部材に対して、リンク作動装置により位置および姿勢を変更可能とした。前記アクチュエータ本体は、細長形状のスピンドルガイド部と、このスピンドルガイド部の先端に先端部材連結部を介して姿勢変更自在に取付けられた先端部材と、この先端部材に回転自在に設けた前記工具と、前記スピンドルガイド部の基端が結合された本体基端ハウジングとを備え、前記先端部材は、前記工具を保持するスピンドルを回転自在に支持し、前記スピンドルガイド部は、工具回転用駆動源の回転を前記スピンドルに伝達する回転軸と、両端に貫通したガイド孔とを内部に有し、先端が前記先端部材に接して進退動作することにより前記先端部材を姿勢変更させる姿勢操作部材を前記ガイド孔内に進退自在に挿通し、姿勢変更用駆動源の回転を進退動作に変換して前記姿勢操作部材を進退させる動作変換機構を前記本体基端ハウジング内に設けたものとする。前記リンク作動装置は、前記ベース部材に直接または間接的に結合された入力部材に対し、前記本体基端ハウジングに直接または間接的に結合された出力部材を、3組以上のリンク機構を介して位置および姿勢を変更可能に連結し、前記各リンク機構は、それぞれ前記入力部材および出力部材に一端が回転可能に連結された入力側および出力側の端部リンク部材と、これら入力側および出力側の端部リンク部材の他端をそれぞれ回転可能に連結した中央リンク部材とでなり、前記各リンク機構は、前記各リンク部材を直線で表現した幾何学モデルが、前記中央リンク部材の中央部に対する入力側部分と出力側部分とが対称を成す形状であり、前記3組以上のリンク機構における2組以上のリンク機構に、これら2組以上の各リンク機構を動作させて前記出力部材の姿勢を制御するリンク機構用駆動源を設けたものとする。そして、前記工具回転用駆動源および姿勢変更用駆動源の両方またはいずれか一方を前記リンク作動装置の前記入力部材または前記ベース部材に設け、この駆動源の回転力を前記回転軸または前記動作変換機構へ伝達する可撓性ワイヤを設ける。
【0015】
前記リンク作動装置は、次のように言い換えることができる。すなわち、リンク作動装置は、入力側および出力側のそれぞれに設けた入力部材および出力部材に対して回転可能に端部リンク部材を連結し、入力側と出力側のそれぞれの端部リンク部材を中央リンク部材に対して回転可能に連結したリンク機構を3組以上有し、各リンク機構の中央部における横断面に関して入力側と出力側を幾何学的に同一とし、前記入力部材に連結された各リンク機構の回転対偶のうち、2組以上のリンク機構について、前記出力部材の姿勢を任意に制御するリンク機構用駆動源を設けたものである。
【0016】
この構成によれば、先端部材に設けた工具の回転により、骨等の切削加工が行われる。その場合に、姿勢変更用駆動源により姿勢操作部材を進退させると、この姿勢操作部材の先端が先端部材に対し作用することにより、スピンドルガイド部の先端に先端部材連結部を介して姿勢変更自在に取付けられた先端部材が姿勢変更する。姿勢変更用駆動源は、先端部材から離れた位置に設けられており、上記先端部材の姿勢変更は遠隔操作で行われる。姿勢操作部材はガイド孔に挿通されているため、姿勢操作部材が長手方向と交差する方向に位置ずれすることがなく、常に先端部材に対し適正に作用することができ、先端部材の姿勢変更動作が正確に行われる。
【0017】
リンク作動装置の出力部材にアクチュエータ本体の本体基端ハウジングが固定され、アクチュエータ本体がリンク作動装置により支持されるため、アクチュエータ本体の位置および姿勢が安定する。リンク作動装置は、3組以上のリンク機構と、リンク機構用駆動源とで、出力部材を直交2軸方向に移動自在な2自由度機構が構成される。この2自由度機構は、出力部材の可動範囲を広くとれる。例えば、入力部材の中心軸と出力部材の中心軸の最大折れ角は約±90°であり、入力部材に対する出力部材の旋回角を0°〜360°の範囲で設定できる。入力部材と連結された各リンク機構の回転対偶のうち、2組以上のリンク機構について、出力部材の姿勢を任意に制御するリンク機構用駆動源を設けたことにより、出力部材を任意の姿勢に容易に決められる。リンク機構用駆動源を設けるリンク機構の回転対偶を2組以上としたのは、入力部材に対する出力部材の姿勢を確定するのに必要なためである。
【0018】
このように、リンク作動装置によってアクチュエータ本体を任意の位置および姿勢に安定状態に支持することができ、かつスピンドルガイド部に対する先端部材の姿勢変更を正確に行えるので、きめ細かな加工ができる。具体的には、狭い部分の加工や精度の良い加工ができる。また、加工時間を短縮できる。それにより、手術用として使用する場合に、患者の負担を軽減できる。
【0019】
この発明において、前記回転軸における前記駆動部ハウジング側の端部の軸心を、前記出力部材の球面中心を通る中心軸と平行とするのが良い。
この構成であると、動作変換機構の回転軸と工具回転用の回転軸とを、互いに平行に駆動部ハウジング内に設けることができ、駆動部ハウジング内を簡素な構成にできる。
【0020】
前記動作変換機構は、前記可撓性ワイヤの回転運動を直線往復運動に変換するねじ機構式の直動機構であって、この直動機構である動作変換機構の最終出力部で前記姿勢操作部材に進退動作させてもよい。
動作変換機構がねじ機構式の直動機構であると、小型でコンパクトな構造で大きさ推力を発生することができる。この場合、ねじ機構の回転軸と工具回転用の回転軸とが互いに平行になる。
【0021】
また、前記動作変換機構は、前記可撓性ワイヤの回転により回転するウォームと、このウォームと噛み合うウォームホイールとを組み合わせた構成であり、前記ウォームホイールの一部分である接触部が前記姿勢操作部材と滑り接触して姿勢操作部材を進退動作させてもよい。
動作変換機構がウォームとウォームホイールとを組み合わせた構成としても、小型でコンパクトな構造で大きさ推力を発生することができる。この場合、ウォームと工具回転用の回転軸とが互いに平行になる。
【0022】
この発明において、前記入力部材および出力部材にそれぞれ貫通孔を設け、各貫通孔に前記可撓性ワイヤを通して設けるのが良い。
可撓性ワイヤを入力部材および出力部材の各貫通孔に通して設ければ、各リンク機構がどのような姿勢になっても、可撓性ワイヤが常に各リンク機構の内側を通る。それにより、可撓性ワイヤが他の部材に接触することを防げる。
【0023】
この発明において、前記可撓性ワイヤは、前記中央リンク部材に固定され各リンク機構の内側に位置するワイヤ案内部材により案内するのが良い。
各リンク機構がどのような姿勢になっても、3つ以上のリンク機構のうち少なくとも2つのリンク機構の中央リンク部材は、1つの軌道円上を通る。そのため、中央リンク部材に固定され各リンク機構の内側に位置するワイヤ案内部材により可撓性ワイヤを案内すれば、可撓性ワイヤと他の部材、例えば中央リンク部材や端部リンク部材との干渉を防止できる。
【0024】
この発明において、前記可撓性ワイヤは、可撓性を有するアウタチューブの内部に、両端がそれぞれ回転の入力端および出力端となる可撓性のインナワイヤを複数の転がり軸受によって回転自在に支持し、隣合う転がり軸受間に、これら転がり軸受に対して予圧を与えるばね要素を設けた構造とするのが良い。
可撓性ワイヤの回転軸となるインナワイヤをアウタチューブの内部に設けることで、インナワイヤを保護することができる。インナワイヤを複数の転がり軸受によって回転自在に支持し、隣合う転がり軸受間にばね要素を設けることにより、インナワイヤの固有振動数が低くなることを抑えられ、インナワイヤを高速回転させることが可能である。
【0025】
この発明において、前記可撓性ワイヤの出力側に、この可撓性ワイヤの回転を減速する減速機構を設けるのが良い。
工具回転用駆動源や姿勢変更用駆動源の回転は、減速機構により減速され、動作変換機構の回転軸や工具回転用の回転軸に伝達される。減速機構を設けたため、工具回転用駆動源や姿勢変更用駆動源の出力するトルクが小さくても、動作変換機構の回転軸や工具回転用の回転軸に大きなトルクを発生させることができる。特に、姿勢変更用駆動源の駆動で行われる先端部材の姿勢変更動作は、比較的低い回転数で大きなトルクを必要とするため、減速機構を設けることの効果が大きい。
減速機構を設ければ、上述のように、可撓性ワイヤに作用するトルクが小さくても大きなトルクを発生させられることから、細い可撓性ワイヤを使用できる。その結果、可撓性ワイヤの最小曲率を小さくでき、リンク作動装置の各リンク機構の姿勢の変化に対応しやすい。また、可撓性ワイヤの捩れが小さいため、先端部材に設けた工具の位置決め精度が良い。
【0026】
前記減速機構と前記姿勢操作部材間の動力伝達部材に、この動力伝達部材の動作位置を検出する位置検出手段を設けるのが良い。
位置検出手段によって検出される動力伝達部材の動作位置から、姿勢操作部材の進退位置を推定できる。このように推定された姿勢操作部材の進退位置に関する情報を用いて、姿勢変更用駆動源をフィードバック制御することができる。そのため、可撓性ワイヤに捩れが生じても、正確に先端部材の位置決め制御を行うことができる。
【0027】
位置検出手段を有する場合、前記入力部材および出力部材にそれぞれ貫通孔を設け、各貫通孔に、前記位置検出手段とこの位置検出手段の検出信号を受信する制御部とをつなぐ配線を通して設けるのが良い。
位置検出手段の配線を入力部材および出力部材の各貫通孔に通して設ければ、各リンク機構がどのような姿勢になっても、配線が常に各リンク機構の内側を通る。それにより、配線が他の部材に接触することを防げる。
【0028】
この発明において、前記スピンドルガイド部は湾曲した箇所を有していてもよい。
姿勢操作部材を可撓性にすれば、スピンドルガイド部に湾曲した箇所があっても、ガイド孔内で進退させることができる。
【0029】
この発明の遠隔操作型アクチュエータは、上記作用および効果を有するため医療用手術用のアクチュエータとして好適である。
【発明の効果】
【0030】
この発明の遠隔操作型アクチュエータは、先端に工具を有するアクチュエータ本体を、ベース部材に対して、リンク作動装置により位置および姿勢を変更可能とした遠隔操作型アクチュエータであって、前記アクチュエータ本体は、細長形状のスピンドルガイド部と、このスピンドルガイド部の先端に先端部材連結部を介して姿勢変更自在に取付けられた先端部材と、この先端部材に回転自在に設けた前記工具と、前記スピンドルガイド部の基端が結合された本体基端ハウジングとを備え、前記先端部材は、前記工具を保持するスピンドルを回転自在に支持し、前記スピンドルガイド部は、工具回転用駆動源の回転を前記スピンドルに伝達する回転軸と、両端に貫通したガイド孔とを内部に有し、先端が前記先端部材に接して進退動作することにより前記先端部材を姿勢変更させる姿勢操作部材を前記ガイド孔内に進退自在に挿通し、姿勢変更用駆動源の回転を進退動作に変換して前記姿勢操作部材を進退させる動作変換機構を前記本体基端ハウジング内に設けたものとし、前記リンク作動装置は、前記ベース部材に直接または間接的に結合された入力部材に対し、前記本体基端ハウジングに直接または間接的に結合された出力部材を、3組以上のリンク機構を介して位置および姿勢を変更可能に連結し、前記各リンク機構は、それぞれ前記入力部材および出力部材に一端が回転可能に連結された入力側および出力側の端部リンク部材と、これら入力側および出力側の端部リンク部材の他端をそれぞれ回転可能に連結した中央リンク部材とでなり、前記各リンク機構は、前記各リンク部材を直線で表現した幾何学モデルが、前記中央リンク部材の中央部に対する入力側部分と出力側部分とが対称を成す形状であり、前記3組以上のリンク機構における2組以上のリンク機構に、これら2組以上の各リンク機構を動作させて前記出力部材の姿勢を制御するリンク機構用駆動源を設けたものとし、前記工具回転用駆動源および姿勢変更用駆動源の両方またはいずれか一方を前記リンク作動装置の前記入力部材または前記ベース部材に設け、この駆動源の回転力を前記回転軸または前記動作変換機構へ伝達する可撓性ワイヤを設けたため、アクチュエータ本体の先端に設けられた工具の姿勢を遠隔操作で変更することができ、アクチュエータ本体を確実に支持し、かつアクチュエータ本体が軽量で、その位置および姿勢を正確に変更することができる。
【図面の簡単な説明】
【0031】
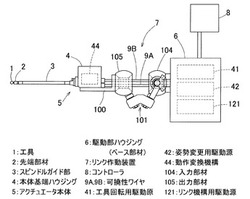
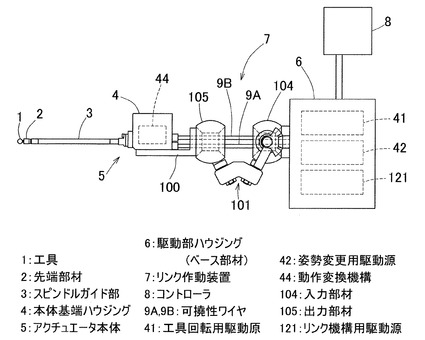
【図1】この発明の実施形態にかかる遠隔操作型アクチュエータの概略構成を示す図である。
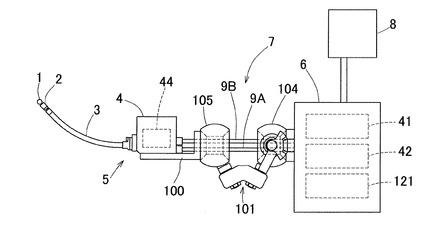
【図2】この発明の異なる実施形態にかかる遠隔操作型アクチュエータの概略構成を示す図である。
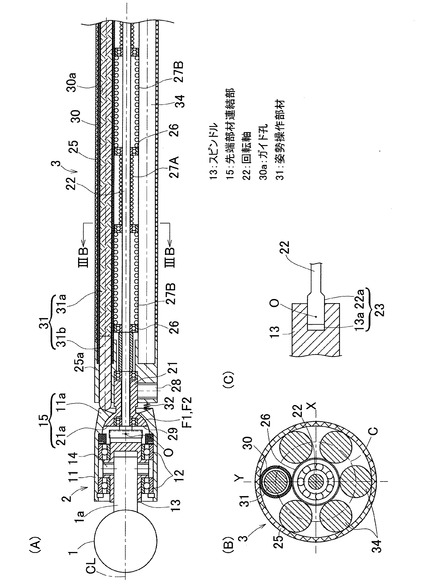
【図3】(A)は図1に示す遠隔操作型アクチュエータの先端部材およびスピンドルガイド部の断面図、(B)はそのIIIB−IIIB断面図、(C)は先端部材と回転軸との連結構造を示す図である。
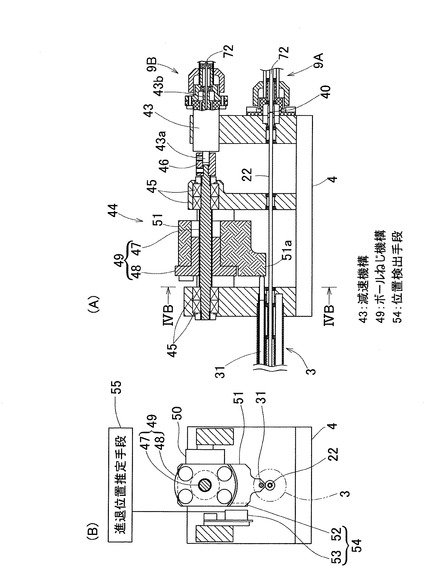
【図4】(A)は同遠隔操作型アクチュエータの本体基端ハウジングの断面図、(B)はそのIVB−IVB断面図である。
【図5】同遠隔操作型アクチュエータのリンク作動装置の正面図である。
【図6】同リンク作動装置の異なる状態を示す正面図である。
【図7】同リンク作動装置の斜視図である。
【図8】同リンク作動装置のリンク機構の一つを直線で表現した図である。
【図9】同リンク作動装置の入力部材、入力側の端部リンク部材、および中央リンク部材の断面図である。
【図10】(A)同遠隔操作型アクチュエータの可撓性ワイヤの断面図、(B)はXB部拡大図、(C)はXC部拡大図である。
【図11】異なるリンク作動装置の正面図である。
【図12】図11のXII−XII断面図である。
【図13】(A)は内部の構成が異なる本体基端ハウジングの断面図、(B)はそのXIIIB−XIIIB断面図である。
【図14】(A)は先端部材の姿勢を変更する機構が異なる遠隔操作型アクチュエータの先端部材およびスピンドルガイド部の断面図、(B)はそのXIVB−XIVB断面図である。
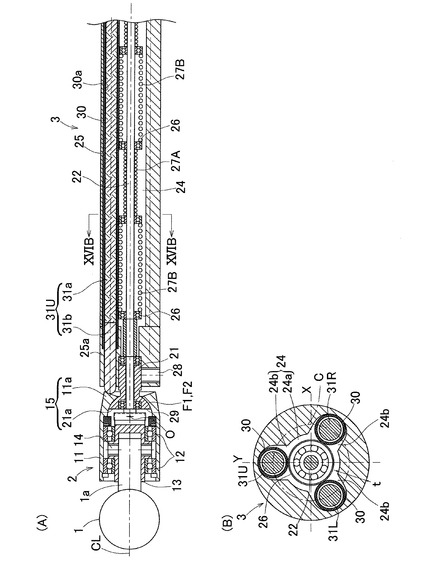
【図15】(A)は先端部材の姿勢を変更する機構がさらに異なる遠隔操作型アクチュエータの先端部材およびスピンドルガイド部の断面図、(B)はそのXVB−XVB断面図である。
【図16】(A)は先端部材の姿勢を変更する機構がさらに異なる遠隔操作型アクチュエータの先端部材およびスピンドルガイド部の断面図、(B)はそのXVIB−XVIB断面図である。
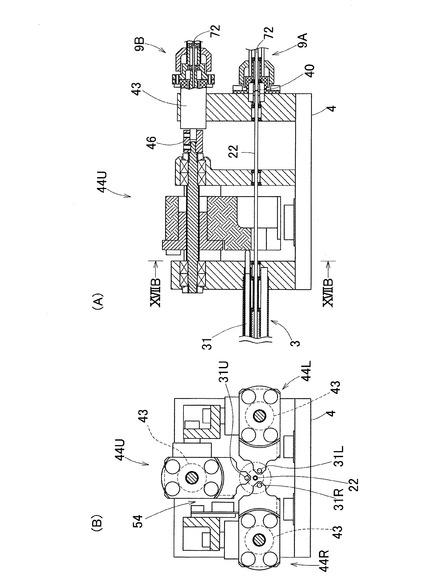
【図17】(A)は図15および図16に示す遠隔操作型アクチュエータの本体基端ハウジングの断面図、(B)はそのXVIIB−XVIIB断面図である。
【発明を実施するための形態】
【0032】
図1および図2は、この発明のそれぞれ異なる実施形態にかかる遠隔操作型アクチュエータの概略構成を示す図である。この遠隔操作型アクチュエータは、先端に回転式の工具1を有するアクチュエータ本体5が、ベース部材である駆動部ハウジング6に対して、リンク作動装置7により位置および姿勢を変更可能とされている。アクチュエータ本体5は、リンク作動装置7の出力部材105に取付部材100を介して取付けられている。駆動部ハウジング6内には、遠隔操作型アクチュエータの各動作部分を動作させる駆動源41,42,121が設けられている。工具回転用駆動源41および姿勢変更用駆動源42の回転力は、可撓性ワイヤ9A,9Bを介してそれぞれアクチュエータ本体5へ伝達される。各駆動源41,42,121は、駆動部ハウジング6に接続のコントローラ8により制御される。図1と図2とは、互いにアクチュエータ本体5が異なるが、他は同じである。
【0033】
アクチュエータ本体5は、回転式の工具1を保持する先端部材2と、この先端部材2が先端に姿勢変更自在に取付けられた細長形状のスピンドルガイド部3と、このスピンドルガイド部3の基端が結合された本体基端ハウジング4とを備える。この本体基端ハウジング4内には、後記動作変換機構44が設けられている。
【0034】
図3と共に、先端部材2およびスピンドルガイド部3の内部構造について説明する。図3は図1の遠隔操作型アクチュエータについて示すが、図1のようにスピンドルガイド部3が真っ直ぐな形状である場合も、図2のようにスピンドルガイド部3が湾曲した形状である場合も、先端部材2およびスピンドルガイド部3の内部構造は基本的に同じである。
【0035】
先端部材2は、略円筒状のハウジング11の内部に、一対の軸受12によりスピンドル13が回転自在に支持されている。スピンドル13は、先端側が開口した筒状で、中空部に工具1のシャンク1aが嵌合状態に挿入され、回り止めピン14によりシャンク1aが回転不能に結合される。この先端部材2は、先端部材連結部15を介してスピンドルガイド部3の先端に取付けられる。先端部材連結部15は、先端部材2を姿勢変更自在に支持する手段であり、球面軸受からなる。具体的には、先端部材連結部15は、ハウジング11の基端の内径縮径部からなる被案内部11aと、スピンドルガイド部3の先端に固定された抜け止め部材21の鍔状部からなる案内部21aとで構成される。両者11a,21aの互いに接する各案内面F1,F2は、スピンドル13の中心線CL上に曲率中心Oが位置し、基端側ほど径が小さい球面とされている。これにより、スピンドルガイド部3に対して先端部材2が抜け止めされるとともに、姿勢変更自在に支持される。この例は、曲率中心Oを通るX軸回りに先端部材2が姿勢変更する構成であるため、案内面F1,F2が、点Oを通るX軸を軸心とする円筒面であってもよい。
【0036】
スピンドルガイド部3は、工具回転用駆動源41(図1)の回転を前記スピンドル13へ伝達する回転軸22を有する。回転軸22は、スピンドルガイド部3から本体基端ハウジング4にわたって設けられており、その基端が本体基端ハウジング4の基端付近に位置している。この例では、回転軸22はワイヤとされ、ある程度の弾性変形が可能である。ワイヤの材質としては、例えば金属、樹脂、グラスファイバー等が用いられる。ワイヤは単線であっても、撚り線であってもよい。図3(C)に示すように、スピンドル13と回転軸22とは、自在継手等の継手23を介して回転伝達可能に接続されている。継手23は、スピンドル13の閉塞した基端に設けられた溝13aと、回転軸22の先端に設けられ前記溝13aに係合する突起22aとで構成される。上記溝13aと突起22aとの連結箇所の中心は、前記案内面F1,F2の曲率中心Oと同位置である。
【0037】
スピンドルガイド部3は、このスピンドルガイド部3の外郭となる外郭パイプ25を有し、この外郭パイプ25の中心に前記回転軸22が位置する。回転軸22は、それぞれ軸方向に離れて配置された複数の転がり軸受26によって回転自在に支持されている。各転がり軸受26間には、これら転がり軸受26に予圧を発生させるためのばね要素27A,27Bが設けられている。ばね要素27A,27Bは、例えば圧縮コイルばねである。転がり軸受26の内輪に予圧を発生させる内輪用ばね要素27Aと、外輪に予圧を発生させる外輪用ばね要素27Bとがあり、これらが交互に配置されている。前記抜け止め部材21は、固定ピン28により外郭パイプ25のパイプエンド部25aに固定され、その先端内周部で転がり軸受29を介して回転軸22の先端部を回転自在に支持している。パイプエンド部25aは、外郭パイプ25と別部材とし、溶接等により結合してもよい。
【0038】
外郭パイプ25の内径面と回転軸22の間には、両端に貫通する1本のガイドパイプ30が設けられ、このガイドパイプ30の内径孔であるガイド孔30a内に、姿勢操作部材31が進退自在に挿通されている。この例では、姿勢操作部材31は、ワイヤ31aと、その両端に設けた柱状ピン31bとでなる。先端部材2側の柱状ピン31bの先端は球面状で、先端部材2のハウジング11の基端面に当接している。本体基端ハウジング4側の柱状ピン31bの先端も球面状で、後記直動部材51(図4)の前面に当接している。
【0039】
上記姿勢操作部材31が位置する周方向位置に対し180度の位相の位置には、先端部材2のハウジング11の基端面とスピンドルガイド部3の外郭パイプ25の先端面との間に、例えば圧縮コイルばねからなる復元用弾性部材32が設けられている。この復元用弾性部材32は、先端部材2を所定姿勢側へ付勢する作用をする。
【0040】
また、外郭パイプ25の内径面と回転軸22の間には、前記ガイドパイプ30とは別に、このガイドパイプ30と同一ピッチ円C上に、複数本の補強シャフト34が配置されている。これらの補強シャフト34は、スピンドルガイド部3の剛性を確保するためのものである。ガイドパイプ30と補強シャフト34の配列間隔は等間隔とされている。ガイドパイプ30および補強シャフト34は、外郭パイプ25の内径面におよび前記転がり軸受26の外径面に接している。これにより、転がり軸受26の外径面を支持している。
【0041】
図4に、本体基端ハウジング4の内部構造を示す。本体基端ハウジング4内には、前記回転軸22が左右方向に沿って設けられ、その基端が可撓性ワイヤ9Aのインナワイヤ72とカップリング40を介して結合されている。それにより、工具回転用駆動源41(図1)の回転が、回転軸22へ伝達される。工具回転用駆動源41は、例えば電動モータである。また、本体基端ハウジング4には、可撓性ワイヤ9Bにより伝達される姿勢変更用駆動源42(図1)の回転を減速して出力する減速機構43と、この減速機構43の出力を回転運動から直線往復運動に変換する直動機構で動作変換機構44とが設けられている。姿勢変更用駆動源42は、ロータリアクチュエータである。ロータリアクチュエータは、電動式であっても、流体圧式であってもよい。可撓性ワイヤ9A,9Bについては、後で詳しく説明する。
【0042】
動作変換機構44は、ねじ機構を有する直動機構である。具体的には、動作変換機構44は、両端部が軸受45で支持され一端が減速機構43の出力軸43aにカップリング46を介して連結されたボールねじ47と、このボールねじ47に螺合するナット48とでなるボールねじ機構49を備え、前記ナット48に、リニアガイド50によりボールねじ47の軸方向に移動自在に案内された直動部材51が固定されている。直動部材51は、動作変換機構44の最終出力部であって、この直動部材51の先端面からなる接触部51aに姿勢操作部材31の基端が当接している。
【0043】
減速機構43の出力軸43aの回転が、ボールねじ機構49により直線運動に変換されて、直動部材51がリニアガイド50に沿って直線移動する。直動部材51が図4(A)の左側へ移動するときは、直動部材51に押された姿勢操作部材31が前進し、直動部材51が右側へ移動するときは、前記復元用弾性部材32の弾性反発力により押し戻されて姿勢操作部材31が後退する。
【0044】
直動部材51にはリニアスケール52が設置され、このリニアスケール52の目盛を、本体基端ハウジング4に固定されたリニアエンコーダ53が読み取る。これらリニアスケール52とリニアエンコーダ53とで、姿勢操作部材31の進退位置を検出する位置検出手段54を構成する。正確には、リニアエンコーダ53の出力は進退位置推定手段55に送信され、この進退位置推定手段55により姿勢操作部材31の進退位置を推定する。つまり、位置検出手段54は、減速機構43と姿勢操作部材31間の動力伝達手段である直動部材51の動作位置を検出し、この検出結果から姿勢操作部材31の進退位置を推定する。
【0045】
進退位置推定手段55は、姿勢操作部材31の進退位置とリニアエコンコーダ53の出力信号との関係を演算式またはテーブル等により設定した関係設定手段(図示せず)を有し、入力された出力信号から前記関係設定手段を用いて姿勢操作部材31の進退位置を推定する。この進退位置推定手段55は、コントローラ8(図1)に設けられたものであっても、あるいは外部の制御装置に設けられたものであってもよい。コントローラ8は、進退位置推定手段55の検出値に基づき、姿勢変更用駆動源42を制御する。
【0046】
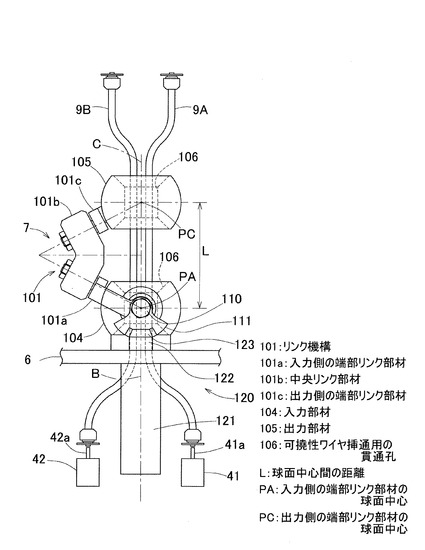
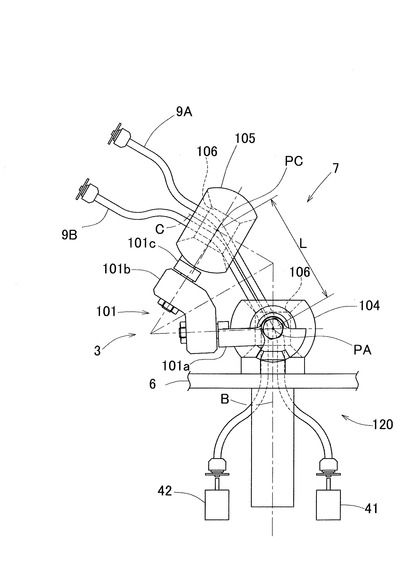
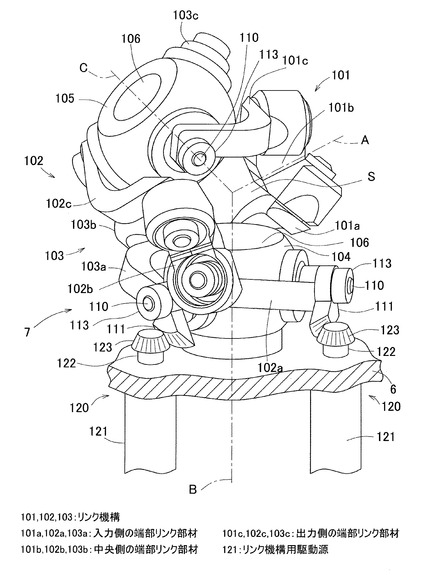
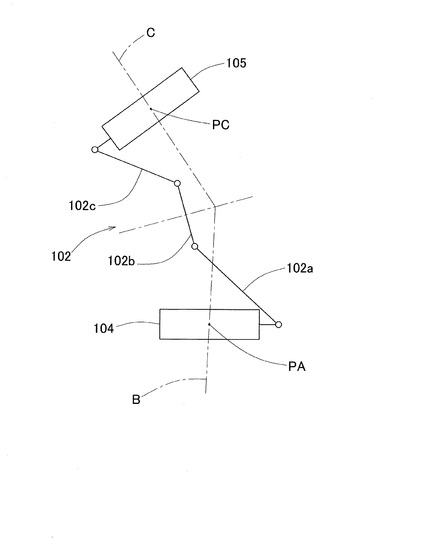
図5および図6は、リンク作動装置の互いに異なる状態を示す正面図、図7はリンク作動装置の斜視図である。リンク作動装置7は、前記駆動部ハウジング6に結合された入力部材104に対し前記アクチュエータ本体5の本体基端ハウジング4に取付部材100を介して結合された出力部材105を、3組のリンク機構101,102,103(以下、「101〜103」と表記する)を介して位置および姿勢を変更可能に連結してある。なお、図5および図6では、3組のリンク機構101〜103のうち1組のリンク機構101のみを表示している。
【0047】
各リンク機構101〜103は、入力側の端部リンク部材101a,102a,103a(以下、「101a〜103a」と表記する)、中央リンク部材101b,102b,103b(以下、「101b〜103b」と表記する)、および出力側の端部リンク部材101c,102c,103c(以下、「101c〜103c」と表記する)で構成され、4つの回転対偶からなる3節連鎖のリンク機構をなす。具体的には、入力側の端部リンク部材101a〜103aの一端が入力部材104に回転可能に連結され、出力側の端部リンク部材101c〜103cの一端が出力部材105に回転可能に連結され、入力側の端部リンク部材101a〜103aおよび出力側の端部リンク部材101c〜103cの他端が中央リンク部材101b〜103bの両端にそれぞれ回転可能に連結されている。
【0048】
入力側および出力側の端部リンク部材101a〜103a,101c〜103cは球面リンク構造で、3組のリンク機構101〜103における球面リンク中心PA,PCは一致しており、また、その中心PA,PCからの距離も同じである。端部リンク部材101a〜103a,101c〜103cと中央リンク部材101b〜103bとの連結部となる回転対偶軸は、ある交差角をもっていてもよいし、平行であってもよい。
【0049】
つまり、3組のリンク機構101〜103は、幾何学的に同一形状をなす。幾何学的に同一形状とは、各リンク部材101a〜103a,101b〜103b,101c〜103cを直線で表現した幾何学モデルが、中央リンク部材101b〜103bの中央部に対する入力側部分と出力側部分が対称を成す形状であることを言う。図8は、一つのリンク機構102を直線で表現した図である。
【0050】
この実施形態のリンク機構101〜103は回転対称タイプで、入力部材104および端部リンク部材101a〜103aと、出力部材105および端部リンク部材101c〜103cとの位置関係が、中央リンク部材101b〜103bの中心線Aに対して回転対称となる位置構成になっている。図5は、入力部材104の中心軸Bと出力部材105の中心軸Cとが同一線上にある状態を示し、図6は、入力部材104の中心軸Bに対して出力部材105の中心軸Cが所定の作動角をとった状態を示す。各リンク機構101〜103の姿勢が変化しても、入力側と出力側の球面リンク中心PA,PC間の距離Lは変化しない。
【0051】
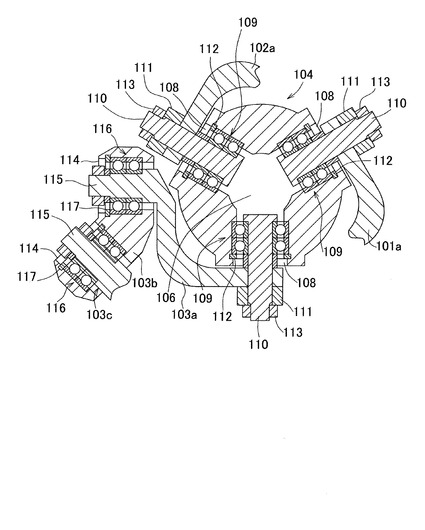
図9に示すように、入力部材104は、その中心部に可撓性ワイヤ挿通用の貫通孔106が軸方向に沿って形成され、また、大きな角度がとれるように外形を球面状としたドーナツ形状をなし、さらに、半径方向に軸部材嵌挿用の貫通孔108を円周方向等間隔で形成し、その貫通孔108に軸受109を介して軸部材110を嵌挿させた構造を具備する。出力部材105も同じ構造で、その中心部に可撓性ワイヤ挿通用の貫通孔106(図7)が軸方向に沿って形成されている。
【0052】
軸受109は、入力部材104の貫通孔108に内嵌された軸受外輪と、軸部材110に外嵌された軸受内輪と、軸受外輪と軸受内輪間に回転自在に介挿されたボール等の転動体とからなる。軸部材110の外側端部は、入力部材104から突出し、その突出部に端部リンク部材101a,102a,103aおよびギア部材111が結合され、ナット113による締付けでもって軸受109に所定の予圧量を付与して固定されている。ギア部材111は、後述するリンク機構101〜103の角度制御機構120の一部を構成する。入力部材104に対して軸部材110を回転自在に支承する軸受109は、止め輪112により入力部材104から抜け止めされている。
【0053】
なお、軸部材110と、端部リンク部材101a〜103aおよびギア部材111とは、加締め等により結合される。キーあるいはセレーションにより結合することが可能である。その場合、結合構造の緩みを防止でき、伝達トルクの増加を図ることができる。
【0054】
上記ギア部材111を軸部材110の外側端部に設けたことで、この入力部材104の可撓性ワイヤ挿通用の貫通孔106とリンク機構101〜103の内側に広い内側空間Sが形成されている。この内側空間Sには、可撓性ワイヤ9A,9Bが通して設けられる。
【0055】
軸受109としては、図示のように2個の玉軸受を配設する以外に、アンギュラ玉軸受、ローラ軸受、あるいは滑り軸受を使用することも可能である。なお、出力部材105は、軸部材110の外側端部にギア部材111が設けられていない点を除いて、入力部材104と同一構造である。軸部材110の円周方向位置は等間隔でなくてもよいが、入力部材104および出力部材105は同じ円周方向の位置関係とする必要がある。これら入力部材104および出力部材105は、3組のリンク機構101〜103で共有され、各軸部材110に端部リンク部材101a〜103a,101c〜103cが連結される。
【0056】
端部リンク部材101a〜103a,101c〜103cはL字状をなし、一辺を入力部材104および出力部材105から突出する軸部材110に結合し、他辺を中央リンク部材101b〜103bに連結する。端部リンク部材101a〜103a,101c〜103cは、大きな角度がとれるようにリンク中心側に位置する軸部115の屈曲基端内側が大きくカットされた形状を有する。
【0057】
中央リンク部材101b〜103bはほぼL字状をなし、両辺に貫通孔114を有する。この中央リンク部材101b〜103bは、大きな角度がとれるようにその周方向側面がカットされた形状を有する。端部リンク部材101a〜103a,101c〜103cの他辺から一体的に屈曲成形された軸部115を、軸受116を介して中央リンク部材101b〜103bの両辺の貫通孔114に挿通する。
【0058】
この軸受116は、中央リンク部材101b〜103bの貫通孔114に内嵌された軸受外輪と、端部リンク部材101a〜103a,101c〜103cの軸部115に外嵌された軸受内輪と、軸受外輪と軸受内輪間に回転自在に介挿されたボール等の転動体とからなる。端部リンク部材101a〜103a,101c〜103cに対して中央リンク部材101b〜103bを回転自在に支承する軸受116は、止め輪117により中央リンク部材101b〜103bから抜け止めされている。
【0059】
前記リンク機構101〜103において、入力部材104および出力部材105の軸部材110の角度、長さ、および端部リンク部材101a〜103a,101c〜103cの幾何学的形状が入力側と出力側で等しく、また、中央リンク部材101b〜103bについても入力側と出力側で形状が等しいとき、中央リンク部材101b〜103bの対称面に対して中央リンク部材101b〜103bと、入出力部材104,105と連結される端部リンク部材101a〜103a,101c〜103cとの角度位置関係を入力側と出力側で同じにすれば、幾何学的対称性から入力部材104および端部リンク部材101a〜103aと、出力部材105および端部リンク部材101c〜103cとは同じに動き、入力側と出力側は同じ回転角になって等速で回転することになる。この等速回転するときの中央リンク部材101b〜103bの対称面を等速二等分面という。
【0060】
このため、入出力部材104,105を共有する同じ幾何学形状のリンク機構101〜103を円周上に複数配置させることにより、複数のリンク機構101〜103が矛盾なく動ける位置として中央リンク部材101b〜103bが等速二等分面上のみの動きに限定され、これにより入力側と出力側は任意の作動角をとっても等速回転が得られる。
【0061】
各リンク機構101〜103における4つの回転対偶の回転部、つまり、端部リンク部材101a〜103a,101c〜103cと入出力部材104,105の2つの連結部分、および端部リンク部材101a〜103a,101c〜103cと中央リンク部材101b〜103bの2つの連結部分を軸受構造とすることにより、その連結部分での摩擦抵抗を抑えて回転抵抗の軽減を図ることができ、滑らかな動力伝達を確保できると共に耐久性を向上できる。
【0062】
この軸受構造では予圧を付与することにより、ラジアル隙間とスラスト隙間をなくし、連結部でのがたつきを抑えることができ、入出力間の回転位相差がなくなり等速性を維持できると共に振動や異音の発生を抑制できる。特に、前記軸受構造において、軸受隙間を負すきまとすることにより、入出力間に生じるバックラッシュを少なくすることができる。
【0063】
このリンク作動装置7は、リンク機構101〜103の2つ以上のリンク機構について、入力部材104に対して入力側の端部リンク部材101a〜103aの角度を制御することにより、入力部材105の2自由度の姿勢を制御する。図5〜図9の例では、全リンク機構101〜103の端部リンク部材101a〜103aの角度を制御する。端部リンク部材101a〜103aの角度制御機構120は、図7に示すように、駆動部ハウジング6にリンク機構用駆動源121を固定して設け、このリンク機構用駆動源121の駆動部ハウジング6から突出する出力軸122に傘歯車123を取付け、この傘歯車123に、入力部材104の軸部材110に取付けた前記ギア部材111のギア部を噛み合わせてある。リンク機構用駆動源121は、例えば電動モータである。リンク機構用駆動源121を回転させることにより、その回転が傘歯車123およびギア部材111を介して軸部材110に伝えられ、入力部材104に対して端部リンク部材101a〜103aが角度変更する。
【0064】
このリンク作動装置7の構成によれば、入力部材104に対する出力部材105の可動範囲を広くとれる。例えば、入力部材104の中心軸Bと出力部材105の中心軸Cの最大折れ角を約±90°とすることができる。また、入力部材104に対する出力部材105の旋回角を0°〜360°の範囲で設定できる。入力部材104と連結された各リンク機構101〜103の回転対偶に、出力部材105の姿勢を任意に制御するリンク機構用駆動源121を設けたことにより、出力部材105を任意の姿勢に容易に決められる。入力部材104から出力部材105へ等速で力が伝達されるため、出力部材105の動作がスムーズである。この実施形態では、入力部材104とリンク機構101〜103の各組の回転対偶にリンク機構用駆動源121を設けてあるが、2組以上にリンク機構用駆動源121を設ければ、入力部材104に対する出力部材105の姿勢を確定することができる。
【0065】
また、この構成のリンク作動装置7は、入出力部材104,105に軸受外輪を内包すると共に軸受内輪を端部リンク部材101a〜103a,101c〜103cと結合させて、入出力部材104,105内に軸受構造を埋設したので、全体の外形を大きくすることなく、入出力部材104,105の外形を拡大することができる。そのため、入力部材104を駆動部ハウジング6に取付けるための取付スペース、並びに出力部材105を本体基端ハウジング4に取付けるための取付スペースの確保が容易である。
【0066】
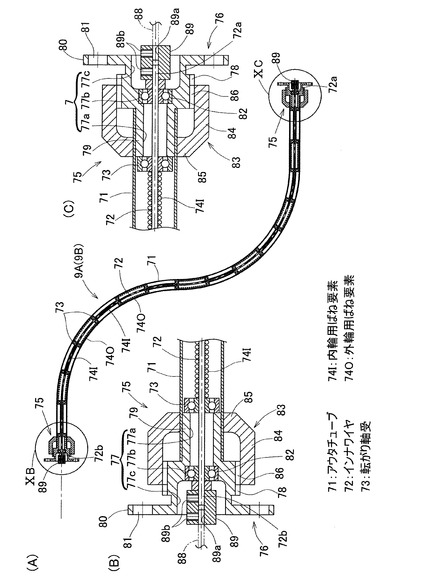
図10(A)〜(C)に、可撓性ワイヤ9A,9Bの詳しい構造を示す。可撓性ワイヤ9A,9Bは、可撓性のアウタチューブ71と、このアウタチューブ71の内部の中心位置に設けられた可撓性のインナワイヤ72と、このインナワイヤ72を前記アウタチューブ71に対して回転自在に支持する複数の転がり軸受73とを備える。インナワイヤ72の両端は、それぞれ回転の入力端72aおよび出力端72bとなる。アウタチューブ71は、例えば樹脂製である。インナワイヤ72としては、例えば金属、樹脂、グラスファイバー等のワイヤが用いられる。ワイヤは単線であっても、撚り線であってもよい。
【0067】
各転がり軸受73はアウタチューブ71の中心線に沿って一定の間隔を開けて配置されており、隣合う転がり軸受73間に、これら転がり軸受73に対して予圧を与えるばね要素74I,74Oが設けられている。ばね要素74I,74Oは、例えば圧縮コイルばねであり、インナワイヤ72の外周を巻線が囲むように設けられる。ばね要素は、転がり軸受73の内輪に予圧を発生させる内輪用ばね要素74Iと、外輪に予圧を発生させる外輪用ばね要素74Oとがあり、これらが交互に配置されている。
【0068】
前記アウタチューブ71の両端には、このアウタチューブ71を他の部材に結合する継手75が設けられている。継手75は、雄ねじ部材76と雌ねじ部材73とで構成される。
雄ねじ部材76は、内周に貫通孔77が形成された筒状の部材であって、軸方向中央部の外周に雄ねじ部78が形成されている。雄ねじ部材76の軸方向の一方端には、内径および外径が同一径で軸方向に延びる円筒部79が設けられている。この円筒部79の外径は、アウタチューブ71の内径部に嵌合する寸法とされている。また、軸方向の他方端には、外径側に拡がるフランジ部80が設けられている。このフランジ部80は他の部材に結合する結合手段であって、円周方向複数箇所に、ボルト等の固定具を挿入するための通孔81が形成されている。前記貫通孔77は、円筒部79側からフランジ部80側に向かって、小径部77a、中径部77b、大径部77cの順に段階的に内径が大きくなっている。中径部77bには、インナワイヤ72を回転自在に支持する転がり軸受82が嵌め込まれる。
【0069】
雌ねじ部材83は、円筒状部84と、この円筒状部84の一端から内径側へ延びるつば状部85とを有する筒状の部材であって、円筒状部84の内周先端側に、前記雄ねじ部材76の雄ねじ部78に螺合する雌ねじ部86が形成されている。つば状部85の内径は、アウタチューブ71が外周に嵌合する寸法とされている。
【0070】
アウタチューブ71を他の部材に結合する際には、まず、雄ねじ部材76の円筒部79をアウタチューブ71の内径部に嵌合させ、かつ雌ねじ部材83のつば状部85をアウタチューブ71の同一端の外径部に嵌合させた状態で、雄ねじ部材76の雄ねじ部78と雌ねじ部材83の雌ねじ部86とを螺合させる。これにより、雄ねじ部材76の円筒部79と雌ねじ部材83のつば状部85とで、アウタチューブ71の一端を内外から挟み込んで固定する。インナワイヤ72は、雄ねじ部材76の貫通孔77に挿通し、貫通孔77の中径部77bに嵌め込んだ転がり軸受82によって支持させる。次いで、雄ねじ部材76のフランジ部80を、結合対象である他の部材に結合する。結合対象である他の部材は、可撓性ワイヤ9Aの場合、工具回転用駆動源41のハウジングと本体基端ハウジング4であり、可撓性ワイヤ9Bの場合、姿勢変更用駆動源42と減速機構43のハウジングである。この結合は、通孔81に挿通したボルト等の固定具(図示せず)によって行う。以上で、アウタチューブ71と他の部材との結合が完了し、図10の状態となる。
【0071】
この状態から、雄ねじ部78と雌ねじ部86の螺合を外すことで、雄ねじ部材76の円筒部79および雌ねじ部材83のつば状部85による拘束からアウタチューブ71が解放され、アウタチューブ71と他の部材との結合が解除される。これらアウタチューブ71と他の部材との結合操作およびその解除操作は容易である。
【0072】
また、アウタチューブ71と継手75を結合した状態で、雄ねじ部材76の結合手段(フランジ部80)により可撓性ワイヤ9A,9Bと他の部材との結合操作および解除操作を行っても良い。これら可撓性ワイヤ9A,9Bと他の部材との結合操作およびその解除操作はさらに容易となる。
【0073】
前記インナワイヤ72の入力端72aおよび出力端72bには、回転軸体88と連結するカップリング89が設けられている。可撓性ワイヤ9Aのインナワイヤ72の入力端72aに連結される回転軸体88は工具回転用駆動源41の出力軸41a(図5)であり、出力端72bに連結される回転軸体88は回転軸22(図4)の基端である。また、可撓性ワイヤ9Bのインナワイヤ72の入力端72aに連結される回転軸体88は姿勢変更用駆動源42の出力軸42a(図5)であり、出力端72bに連結される回転軸体88は減速機構43の入力軸43b(図4)である。
【0074】
図例のカップリング89は、軸方向に貫通する貫通孔89aを有し、この貫通孔89aと外周との間に軸方向に離れて2つのねじ孔89bを設けてある。前記貫通孔89aにインナワイヤ72および回転軸体88を両側から挿入し、ねじ孔89bに螺着したボルト等のねじ部材(図示せず)の先端をインナワイヤ72および回転軸体88に押し付けることで、これらインナワイヤ72および回転軸体88をカップリング89に固定して、インナワイヤ72と回転軸体88とを連結する。カップリング89は、インナワイヤ72と回転軸体88とを回転伝達可能に連結できればよく、上記以外の構成であってもよい。
【0075】
この構成の可撓性ワイヤ9A,9Bは、隣合う転がり軸受73間に、これら転がり軸受73に対して予圧を与えるばね要素74I,74Oを設けたことにより、インナワイヤ72の固有振動数が低くなることを抑えられ、インナワイヤ72を高速回転させることが可能である。内輪用ばね要素74Iおよび外輪用ばね要素74Oは、インナワイヤ72の長さ方向にわたり交互に配置されているため、アウタチューブ71の径を大きくせずに、ばね要素74I,74Oを設けることができる。
【0076】
また、可撓性ワイヤ9Bの場合、インナワイヤ72の出力側にこのインナワイヤ72の回転を減速して出力する減速機構43が設けられる、インナワイヤ72で伝達するトルクが小さくても、大きなトルクを発生できる。そのため、コンパクトな構造で、可撓性の高い可撓性ワイヤ9Bを実現できる。
【0077】
この遠隔操作型アクチュエータの動作を説明する。
アクチュエータ本体5はリンク作動装置7により支持されており、リンク機構用駆動源121の駆動により、アクチュエータ本体5を直交2軸方向に移動させて、適正な位置および姿勢に保持する。リンク作動機構7は、入力部材104に対する出力部材105の可動範囲が広く、アクチュエータ本体5を任意の姿勢に容易に決められる。また、リンク作動装置7でアクチュエータ本体5を支持しているため、アクチュエータ本体5の位置および姿勢が安定する。
【0078】
工具回転用駆動源41を駆動すると、その回転が可撓性ワイヤ9Aのインナワイヤ72および回転軸22を介してスピンドル13に伝達されて、スピンドル13と共に工具1が回転する。この回転する工具1により、骨等を切削加工する。その際、姿勢変更用駆動源42をコントローラ8により制御して、遠隔操作で先端部材2の姿勢変更を行う。
【0079】
例えば、姿勢操作部材31を先端側へ進出させると、姿勢操作部材31によって先端部材2のハウジング11が押されて、先端部材2は図3(A)において先端側が下向きとなる側へ案内面F1,F2に沿って姿勢変更する。逆に、姿勢操作部材31を後退させると、復元用弾性部材32の弾性反発力によって先端部材2のハウジング11が押し戻され、先端部材2は図3(A)において先端側が上向きとなる側へ案内面F1,F2に沿って姿勢変更する。このとき、先端部材連結部15には、姿勢操作部材31の圧力、復元用弾性部材32の弾性反発力、および抜け止め部材21からの反力が作用しており、これらの作用力の釣り合いにより先端部材2の姿勢が決定される。
【0080】
姿勢操作部材31の進退は、詳しくは次のようにして行われる。すなわち、前記姿勢変更用駆動源42の回転が、可撓性ワイヤ9Bのインナワイヤ72を介して減速機構43に伝達され、減速機構43により減速される。さらに、減速機構43の出力軸43bの回転運動が動作変換機構44により直線往復運動に変換されて、出力部材である直動部材51に伝達される。この直動部材51の進退動作が接触部51aより姿勢操作部材31の基端へ伝達されて、姿勢操作部材31が進退動作する。減速機構43が設けられているため、姿勢変更用駆動源42の出力するトルクが小さくても、大きなトルクを発生させて、直動部材51に大きな作用力を与えることができる。そのため、姿勢操作部材31を確実に進退動作させることができ、先端部材2に設けた工具1を正確に位置決めできる。また、アクチュエータ本体5に工具回転用駆動源41や姿勢変更用駆動源42を設けないため、アクチュエータ本体5の重量を軽くできる。その結果、リンク機構101〜103に作用する慣性モーメントが小さくなり、リンク機構用駆動源121の小型化が可能になる。
【0081】
先端部材2の姿勢は、位置検出手段54により検出される姿勢操作部材31の進退位置から求められる。位置検出手段54の検出値、正確にはリニアエンコーダ53の検出値をコントローラ8にフィードバックさせて、姿勢変更用駆動源42の出力量を制御するフィードバック制御を行えば、工具1の位置決め精度を向上させることができる。
【0082】
姿勢操作部材31はガイド孔30aに挿通されているため、姿勢操作部材31が長手方向と交差する方向に位置ずれすることがなく、常に先端部材2に対し適正に作用することができ、先端部材2の姿勢変更動作が正確に行われる。また、姿勢操作部材31は可撓性であるため、スピンドルガイド部3が湾曲部を有する場合でも先端部材2の姿勢変更動作が確実に行われる。さらに、スピンドル13と回転軸22との連結箇所の中心が案内面F1,F2の曲率中心Oと同位置であるため、先端部材2の姿勢変更によって回転軸22に対して押し引きする力がかからず、先端部材2が円滑に姿勢変更できる。
【0083】
この遠隔操作型アクチュエータは、例えば人工関節置換手術において骨の髄腔部を削るのに使用されるものであり、施術時には、先端部材2の全部または一部が患者の体内に挿入して使用される。このため、上記のように先端部材2の姿勢を遠隔操作で変更できれば、常に工具1を適正な姿勢に保持した状態で骨の加工をすることができ、人工関節挿入用穴を精度良く仕上げることができる。また、アクチュエータ本体5が安定状態に支持されるので、操作がし易く、加工時間を短縮できる。それにより、手術用として使用する場合に、患者の負担を軽減できる。
【0084】
細長形状であるスピンドルガイド部3には、回転軸22および姿勢操作部材31を保護状態で設ける必要があるが、外郭パイプ25の中心部に回転軸22を設け、外郭パイプ25と回転軸22との間に、姿勢操作部材31を収容したガイドパイプ30と補強シャフト34とを円周方向に並べて配置した構成としたことにより、回転軸22および姿勢操作部材31を保護し、かつ内部を中空して軽量化を図りつつ剛性を確保できる。また、全体のバランスも良い。
【0085】
回転軸22を支持する転がり軸受26の外径面を、ガイドパイプ30と補強シャフト34とで支持させたため、余分な部材を用いずに転がり軸受26の外径面を支持できる。また、ばね要素27A,27Bにより転がり軸受26に予圧がかけられているため、ワイヤからなる回転軸22を高速回転させることができる。そのため、スピンドル13を高速回転させて加工することができ、加工の仕上がりが良く、工具1に作用する切削抵抗を低減させられる。ばね要素27A,27Bは隣合う転がり軸受26間に設けられているので、スピンドルガイド部3の径を大きくせずにばね要素27A,27Bを設けることができる。
【0086】
以上、アクチュエータ本体5のスピンドルガイド部3が直線形状である図1の例について説明したが、姿勢操作部材31が可撓性であるため、図2のようにスピンドルガイド部3が湾曲していても、先端部材2の姿勢変更動作を確実に行える。スピンドルガイド部3の一部分のみが湾曲形状であってもよい。スピンドルガイド部3が湾曲形状であれば、直線形状では届きにくい骨の奥まで先端部材2を挿入することが可能となる場合があり、人工関節置換手術における人工関節挿入用穴の加工を精度良く仕上げることが可能になる。
【0087】
スピンドルガイド部3を湾曲形状とする場合、外郭パイプ25、ガイドパイプ30、および補強シャフト34を湾曲形状とする必要がある。また、回転軸22は変形しやすい材質を用いるのが良く、例えば形状記憶合金が適する。
【0088】
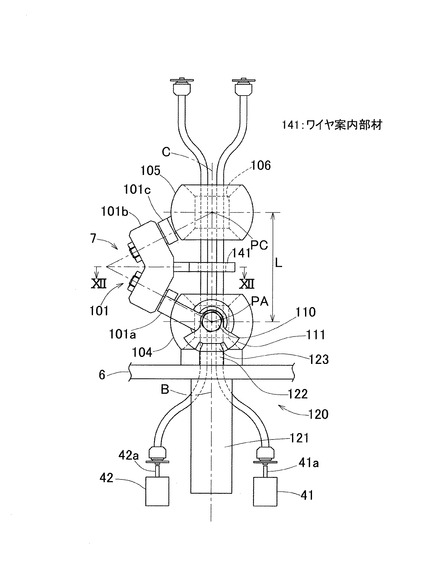
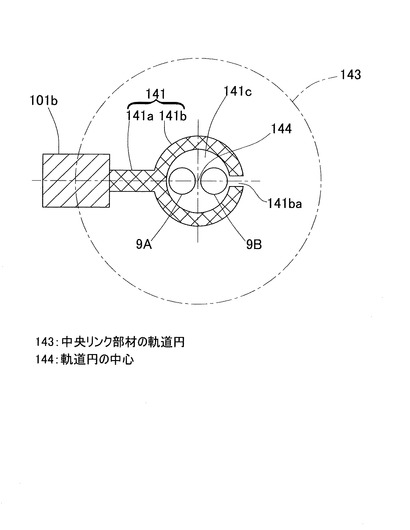
図11および図12はリンク作動装置の異なる構成を示す。このリンク作動装置7は、1つのリンク機構101の中央リンク部材101bにワイヤ案内部材141を固定して設け、このワイヤ案内部材141により可撓性ワイヤ9A,9Bを案内するようにしたものである。ワイヤ案内部材141は、基端が中央リンク部材101bに固定された支持部141aと、この支持部141aの先端に一体に設けたC字状の案内部141bとでなる。案内部141bの切れ目141baは可撓性ワイヤ9A,9Bの直径よりも小さい寸法であり、中央に可撓性ワイヤ9A,9Bを通す円形の開口141cが形成されている。この開口141cの中心は、中央リンク部材101bの軌道円143の中心144と合致する位置とされている。
【0089】
各リンク機構101〜103がどのような姿勢になっても、3つ以上のリンク機構のうち少なくとも2つのリンク機構の中央リンク部材は、1つの軌道円143上を通る。そのため、中央リンク部材101bに固定したワイヤ案内部材141により可撓性ワイヤ9A,9Bを案内すれば、可撓性ワイヤ9A,9Bと他の部材、例えば他の中央リンク部材102b,103bや端部リンク部材102a,102c,103a,103cとの干渉を防止できる。また、中央リンク部材101bの軌道円143の中心144は、常に入力側と出力側の球面リンク中心を結ぶ直線上に位置し、球面リンク中心間の距離Lは、各リンク機構101〜103の姿勢が変化しても一定であるため、上記のようにワイヤ案内部材141の案内部141bの中心を中央リンク部材101bの軌道円143の中心144と合致する位置としたことで、可撓性ワイヤ9A,9Bを最短距離で距離変動のない位置に配置することができる。
【0090】
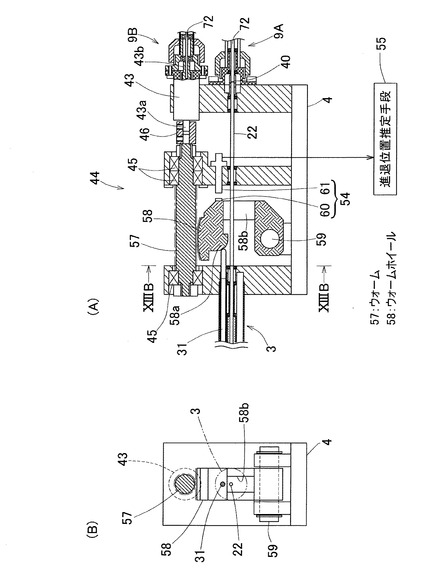
図13は、動作変換機構の異なる例を示す。この動作変換機構44は、ウォーム57とウォームホイール58とを組み合わせた構成である。具体的には、動作変換機構44は、両端部が軸受45で支持され一端が減速機構43の出力軸43aにカップリング46を介して連結されたウォーム57と、支持軸59に支持され前記ウォーム57と噛み合うウォームホイール58とを備える。ウォームホイール58は動作変換機構44の最終出力部であって、このウォームホイール58の先端面からなる接触部58aに姿勢操作部材31の基端が当接している。なお、ウォームホイール58は、円周の一部にだけ歯が設けられ形状をしており、回転軸22が挿通される開口58bを有している。
【0091】
姿勢変更用駆動源42の出力軸42aの回転が、減速機構43で減速され、さらにウォーム57とウォームホイール58とでなる減速機構により減速されて、ウォームホイール58へ伝達される。ウォームホイール58の接触部58aが姿勢操作部材31に対して滑り接触しながら、ウォームホイール58が揺動することにより、姿勢操作部材31に進退動作を与える。すなわち、接触部58aが図12(A)の左側へ回動するときは、接触部58aに押された姿勢操作部材31が前進し、接触部58aが右側へ回動するときは、前記復元用弾性部材32の弾性反発力により押し戻されて姿勢操作部材31が後退する。
【0092】
姿勢操作部材31の進退位置は、位置検出手段54により検出される。この図例の場合、位置検出手段54は、ウォームホイール58の背面に設けた被検出部60と、本体基端ハウジング4に固定して設けられ前記被検出部60の変位を検出する検出部61とでなる。位置検出手段54は、光学式であっても磁気式であってもよい。正確には、検出部61の出力は進退位置推定手段55に送信され、この進退位置推定手段55により姿勢操作部材31の進退位置を推定する。つまり、位置検出手段54は、減速機構43と姿勢操作部材31間の動力伝達手段であるウォームホイール58の動作位置を検出し、この検出結果から姿勢操作部材31の進退位置を推定する。
【0093】
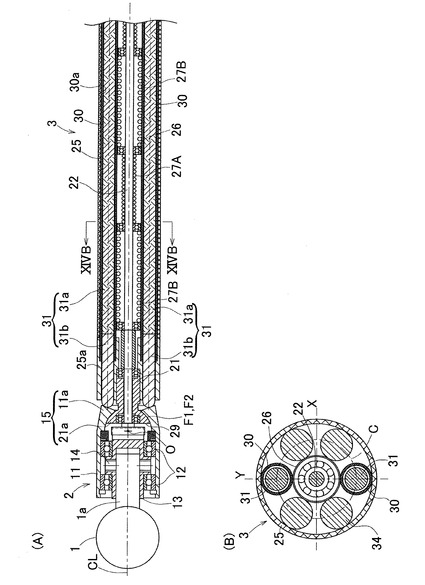
図14は、先端部材2の姿勢を変更させる構成が異なる実施形態を示す。この遠隔操作型アクチュエータは、外郭パイプ25内の互いに180度の位相にある周方向位置に2本のガイドパイプ30を設け、そのガイドパイプ30の内径孔であるガイド孔30a内に、前記同様の姿勢操作ワイヤ31aおよび柱状ピン31bからなる姿勢操作部材31が進退自在に挿通してある。2本のガイドパイプ30間には、ガイドパイプ30と同一ピッチ円C上に複数本の補強シャフト34が配置されている。復元用弾性部材32は設けられていない。案内面F1,F2は、曲率中心が点Oである球面、または点Oを通るX軸を軸心とする円筒面である。
【0094】
駆動部4(図示せず)には、2つの姿勢操作部材31をそれぞれ個別に進退操作させる2つの姿勢変更用駆動源42(図示せず)が設けられており、これら2つの姿勢変更用駆動源42を互いに逆向きに駆動することで先端部材2の姿勢変更を行う。例えば、図14における上側の姿勢操作部材31を先端側へ進出させ、かつ下側の姿勢操作部材31を後退させると、上側の姿勢操作部材31によって先端部材2のハウジング11が押されることにより、先端部材2は図14(A)において先端側が下向きとなる側へ案内面F1,F2に沿って姿勢変更する。逆に、両姿勢操作部材31を逆に進退させると、下側の姿勢操作部材31によって先端部材2のハウジング11が押されることにより、先端部材2は図14(A)において先端側が上向きとなる側へ案内面F1,F2に沿って姿勢変更する。その際、先端部材連結部15には、上下2つの姿勢操作部材31の圧力、および抜け止め部材21からの反力が作用しており、これらの作用力の釣り合いにより先端部材2の姿勢が決定される。この構成では、2つの姿勢操作部材31で先端部材2のハウジング11に加圧されるため、1つ姿勢操作部材31だけで加圧される前記実施形態に比べ、先端部材2の姿勢安定性を高めることができる。
【0095】
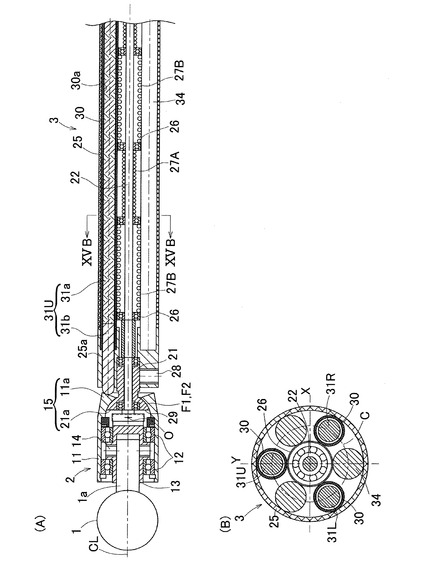
図15は、先端部材2の姿勢を変更させる構成がさらに異なる実施形態を示す。この遠隔操作型アクチュエータは、外郭パイプ25内の互いに120度の位相にある周方向位置に3本のガイドパイプ30を設け、そのガイドパイプ30の内径孔であるガイド孔30a内に前記同様の姿勢操作部材31が進退自在に挿通してある。3本のガイドパイプ30間には、ガイドパイプ30と同一ピッチ円C上に複数本の補強シャフト34が配置されている。復元用弾性部材32は設けられていない。案内面F1,F2は曲率中心が点Oである球面であり、先端部材2は任意方向に傾動可能である。
【0096】
駆動部4には、3つの姿勢操作部材31(31U,31L,31R)をそれぞれ個別に進退操作させる3つの姿勢変更用駆動源(図示せず)が設けられており、これら3つの姿勢変更用駆動源を互いに連係させて駆動することで先端部材2の姿勢変更を行う。
【0097】
例えば、図15における上側の1つの姿勢操作部材31Uを先端側へ進出させ、かつ他の2つの姿勢操作部材31L,31Rを後退させると、上側の姿勢操作部材31Uによって先端部材2のハウジング11が押されることにより、先端部材2は図15(A)において先端側が下向きとなる側へ案内面F1,F2に沿って姿勢変更する。このとき、各姿勢操作部材31の進退量が適正になるよう、各姿勢変更用駆動源が制御される。各姿勢操作部材31を逆に進退させると、左右の姿勢操作部材31L,31Rによって先端部材2のハウジング11が押されることにより、先端部材2は図15(A)において先端側が上向きとなる側へ案内面F1,F2に沿って姿勢変更する。
【0098】
また、上側の姿勢操作部材31Uは静止させた状態で、左側の姿勢操作部材31Lを先端側へ進出させ、かつ右側の姿勢操作部材31Rを後退させると、左側の姿勢操作部材31Lによって先端部材2のハウジング11が押されることにより、先端部材2は右向き、すなわち図15(A)において紙面の裏側向きとなる側へ案内面F1,F2に沿って姿勢変更する。左右の姿勢操作部材31L,31Rを逆に進退させると、右の姿勢操作部材31Rによって先端部材2のハウジング11が押されることにより、先端部材2は左向きとなる側へ案内面F1,F2に沿って姿勢変更する。
【0099】
このように姿勢操作部材31を円周方向の3箇所に設けることにより、先端部材2を上下左右の2軸(X軸、Y軸)の方向に姿勢変更することができる。その際、先端部材連結部15には、3つの姿勢操作部材31の圧力、および抜け止め部材21からの反力が作用しており、これらの作用力の釣り合いにより先端部材2の姿勢が決定される。この構成では、3つの姿勢操作部材31で先端部材2のハウジング11に加圧されるため、さらに先端部材2の姿勢安定性を高めることができる。姿勢操作部材31の数をさらに増やせば、先端部材2の姿勢安定性をより一層高めることができる。
【0100】
図16は図15に示すものと比べてスピンドルガイド部3の内部構造が異なる実施形態を示す。この遠隔操作型アクチュエータのスピンドルガイド部3は、外郭パイプ25の中空孔24が、中心部の円形孔部24aと、この円形孔部24aの外周における互いに120度の位相をなす周方向位置から外径側へ凹んだ3つの溝状部24bとでなる。溝状部24bの先端の周壁は、断面半円形である。そして、円形孔部24aに回転軸22と転がり軸受26とが収容され、各溝状部24bに姿勢操作部材31(31U,31L,31R)が収容されている。
【0101】
外郭パイプ25を上記断面形状としたことにより、外郭パイプ25の溝状部24b以外の箇所の肉厚tを厚くなり、外郭パイプ25の断面2次モーメントが大きくなる。すなわち、スピンドルガイド部3の剛性が高まる。それにより、先端部材2の位置決め精度を向上させられるとともに、切削性を向上させられる。また、溝状部24bにガイドパイプ30を配置したことにより、ガイドパイプ30の円周方向の位置決めを容易に行え、組立性が良好である。
【0102】
図15や図16のように姿勢操作部材31が周方向の3箇所に設けられている場合、動作変換機構44を例えば図17のように構成することができる。すなわち、各姿勢操作部材31(31U,31L,31R)をそれぞれ個別に進退操作させる3つの姿勢変更用駆動源(図示せず)にそれぞれ対応させて、3つの動作変換機構44(44U,44L,44R)を設ける。各姿勢変更用駆動源は駆動部ハウジング(図示せず)に設けられ、その回転が、可撓性ワイヤ9Bを介して減速機構43へ伝達され、減速機構43により減速されてから、動作変換機構44へ伝達される。図17は、動作変換機構を直動機構型とした例である。各動作変換機構44は、回転軸22を中心にして放射状に配置してある。
【符号の説明】
【0103】
1…工具
2…先端部材
3…スピンドルガイド部
4…本体基端ハウジング
5…アクチュエータ本体
6…駆動部ハウジング(ベース部材)
7…リンク作動装置
8…コントローラ
9A,9B…可撓性ワイヤ
13…スピンドル
15…先端部材連結部
22…回転軸
30…ガイドパイプ
30a…ガイド孔
31…姿勢操作部材
41…工具回転用駆動源
42…姿勢変更用駆動源
43…減速機構
44…動作変換機構
49…ボールねじ機構
54…位置検出手段
57…ウォーム
58…ウォームホイール
71…アウタチューブ
72…インナワイヤ
73…転がり軸受
74I…内輪用ばね要素
74O…外輪用ばね要素
101,102,103…リンク機構
101a,102a,103a…入力側の端部リンク部材
101b,102b,103b…中央リンク部材
101c,102c,103c…出力側の端部リンク部材
104…入力部材
105…出力部材
106…可撓性ワイヤ挿通用の貫通孔
121…リンク機構用駆動源
141…ワイヤ案内部材
143…中央リンク部材の軌道円
【技術分野】
【0001】
この発明は、工具の姿勢を遠隔操作で変更可能で、医療用、機械加工等の用途で用いられる遠隔操作型アクチュエータに関する。
【背景技術】
【0002】
医療用として骨の加工に用いられたり、機械加工用としてドリル加工や切削加工に用いられたりする遠隔操作型アクチュエータがある。遠隔操作型アクチュエータは、直線形状や湾曲形状をした細長いパイプ部の先端に設けた工具を遠隔操作で制御する。ただし、従来の遠隔操作用アクチュエータは、工具の回転のみを遠隔操作で制御するだけであったため、医療用の場合、複雑な形状の加工や外からは見えにくい箇所の加工が難しかった。また、ドリル加工では、直線だけではなく、湾曲状の加工が可能なことが求められる。さらに、切削加工では、溝内部の奥まった箇所の加工が可能なことが求められる。以下、医療用を例にとって、遠隔操作型アクチュエータの従来技術と課題について説明する。
【0003】
整形外科分野において、骨の老化等によって擦り減って使えなくなった関節を新しく人工のものに取り替える人工関節置換手術がある。この手術では、患者の生体骨を人工関節が挿入できるように加工する必要があるが、その加工には、術後の生体骨と人工関節との接着強度を高めるために、人工関節の形状に合わせて精度良く加工することが要求される。
【0004】
例えば、股関節の人工関節置換手術では、大腿骨の骨の中心にある髄腔部に人工関節挿入用の穴を形成する。人工関節と骨との接触強度を保つには両者の接触面積を大きくとる必要があり、人工関節挿入用の穴は、骨の奥まで延びた細長い形状に加工される。このような骨の切削加工に用いられる医療用アクチュエータとして、細長いパイプ部の先端に工具を回転自在に設け、パイプ部の基端側に設けたモータ等の回転駆動源の駆動により、パイプ部の内部に配した回転軸を介して工具を回転させる構成のものがある(例えば特許文献1)。この種の医療用アクチュエータは、外部に露出した回転部分は先端の工具のみであるため、工具を骨の奥まで挿入することができる。
【0005】
人工関節置換手術では、皮膚切開や筋肉の切断を伴う。すなわち、人体に傷を付けなければならない。その傷を最小限に抑えるためには、前記パイプ部は真っ直ぐでなく、適度に湾曲している方が良い場合がある。このような状況に対応するためのものとして、次のような従来技術がある。例えば、特許文献2は、パイプ部の中間部を2重に湾曲させて、パイプ部の先端側の軸心位置と基端側の軸心位置とをずらせたものである。このようにパイプ部の軸心位置が先端側と軸心側とでずれているものは、他にも知られている。また、特許文献3は、パイプ部を180度回転させたものである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−301149号公報
【特許文献2】米国特許第4,466,429号明細書
【特許文献3】米国特許第4,265,231号明細書
【特許文献4】特開2001−17446号公報
【特許文献5】米国特許第5,769,092号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
生体骨の人工関節挿入用穴に人工関節を嵌め込んだ状態で、生体骨と人工関節との間に広い隙間があると、術後の接着時間が長くなるため、前記隙間はなるべく狭いのが望ましい。また、生体骨と人工関節の接触面が平滑であることも重要であり、人工関節挿入用穴の加工には高い精度が要求される。しかし、パイプ部がどのような形状であろうとも、工具の動作範囲はパイプ部の形状の制約を受けるため、皮膚切開や筋肉の切断をできるだけ小さくしながら、生体骨と人工関節との間の隙間を狭くかつ両者の接触面が平滑になるように人工関節挿入用穴を加工するのは難しい。
【0008】
一般に、人工関節置換手術が行われる患者の骨は、老化等により強度が弱くなっていることが多く、骨そのものが変形している場合もある。したがって、通常考えられる以上に、人工関節挿入用穴の加工は難しい。
【0009】
そこで、本出願人は、人工関節挿入用穴の加工を比較的容易にかつ精度良く行えるようにすることを目的として、先端に設けた工具の姿勢を遠隔操作で変更可能とすることを試みた。工具の姿勢が変更可能であれば、パイプ部の形状に関係なく、工具を適正な姿勢に保持することができるからである。しかし、工具は細長いパイプ部の先端に設けられているため、工具の姿勢を変更させる機構を設ける上で制約が多く、それを克服するための工夫が必要である。また、パイプ部が湾曲部を有することも予想され、その場合でも確実に姿勢変更動作をさせられることが望まれる。
【0010】
なお、細長いパイプ部を有しない医療用アクチュエータでは、手で握る部分に対して工具が設けられた部分が姿勢変更可能なものがある(例えば特許文献4)が、遠隔操作で工具の姿勢を変更させるものは提案されていない。
【0011】
また、遠隔操作型アクチュエータを人が直接持って操作する場合、手の震え等が被切削物に対する工具の位置決め精度に影響する。そのため、精度良く加工するには、多くの経験が必要である。特に、ガイド部が湾曲形状である場合、ガイド部の先端に設けた工具の位置を予測し難く、操作がより一層に複雑で困難になる。それに伴って、切削時間も長くなる。遠隔操作型アクチュエータを人工関節置換手術の手術用として使用する場合、切削時間が長いと、患者の負担が大きい。
【0012】
そこで、遠隔操作型アクチュエータを、1自由度または2自由度以上の自由度を持つ支持装置で支持される遠隔操作型アクチュエータとした。それにより、手の震え等の悪影響を排除できる。この種の遠隔操作型アクチュエータとしては、例えば特許文献5に記載のものが知られているが、従来のものは、遠隔操作型アクチュエータが工具の姿勢を変更できなかったため、きめ細かな加工ができなかった。
【0013】
この発明は、アクチュエータ本体の先端に設けられた工具の姿勢を遠隔操作で変更することができ、アクチュエータ本体を確実に支持し、かつアクチュエータ本体が軽量で、その位置および姿勢を正確に変更することができる遠隔操作型アクチュエータを提供することを課題としている。
【課題を解決するための手段】
【0014】
この発明にかかる遠隔操作型アクチュエータは、先端に工具を有するアクチュエータ本体を、ベース部材に対して、リンク作動装置により位置および姿勢を変更可能とした。前記アクチュエータ本体は、細長形状のスピンドルガイド部と、このスピンドルガイド部の先端に先端部材連結部を介して姿勢変更自在に取付けられた先端部材と、この先端部材に回転自在に設けた前記工具と、前記スピンドルガイド部の基端が結合された本体基端ハウジングとを備え、前記先端部材は、前記工具を保持するスピンドルを回転自在に支持し、前記スピンドルガイド部は、工具回転用駆動源の回転を前記スピンドルに伝達する回転軸と、両端に貫通したガイド孔とを内部に有し、先端が前記先端部材に接して進退動作することにより前記先端部材を姿勢変更させる姿勢操作部材を前記ガイド孔内に進退自在に挿通し、姿勢変更用駆動源の回転を進退動作に変換して前記姿勢操作部材を進退させる動作変換機構を前記本体基端ハウジング内に設けたものとする。前記リンク作動装置は、前記ベース部材に直接または間接的に結合された入力部材に対し、前記本体基端ハウジングに直接または間接的に結合された出力部材を、3組以上のリンク機構を介して位置および姿勢を変更可能に連結し、前記各リンク機構は、それぞれ前記入力部材および出力部材に一端が回転可能に連結された入力側および出力側の端部リンク部材と、これら入力側および出力側の端部リンク部材の他端をそれぞれ回転可能に連結した中央リンク部材とでなり、前記各リンク機構は、前記各リンク部材を直線で表現した幾何学モデルが、前記中央リンク部材の中央部に対する入力側部分と出力側部分とが対称を成す形状であり、前記3組以上のリンク機構における2組以上のリンク機構に、これら2組以上の各リンク機構を動作させて前記出力部材の姿勢を制御するリンク機構用駆動源を設けたものとする。そして、前記工具回転用駆動源および姿勢変更用駆動源の両方またはいずれか一方を前記リンク作動装置の前記入力部材または前記ベース部材に設け、この駆動源の回転力を前記回転軸または前記動作変換機構へ伝達する可撓性ワイヤを設ける。
【0015】
前記リンク作動装置は、次のように言い換えることができる。すなわち、リンク作動装置は、入力側および出力側のそれぞれに設けた入力部材および出力部材に対して回転可能に端部リンク部材を連結し、入力側と出力側のそれぞれの端部リンク部材を中央リンク部材に対して回転可能に連結したリンク機構を3組以上有し、各リンク機構の中央部における横断面に関して入力側と出力側を幾何学的に同一とし、前記入力部材に連結された各リンク機構の回転対偶のうち、2組以上のリンク機構について、前記出力部材の姿勢を任意に制御するリンク機構用駆動源を設けたものである。
【0016】
この構成によれば、先端部材に設けた工具の回転により、骨等の切削加工が行われる。その場合に、姿勢変更用駆動源により姿勢操作部材を進退させると、この姿勢操作部材の先端が先端部材に対し作用することにより、スピンドルガイド部の先端に先端部材連結部を介して姿勢変更自在に取付けられた先端部材が姿勢変更する。姿勢変更用駆動源は、先端部材から離れた位置に設けられており、上記先端部材の姿勢変更は遠隔操作で行われる。姿勢操作部材はガイド孔に挿通されているため、姿勢操作部材が長手方向と交差する方向に位置ずれすることがなく、常に先端部材に対し適正に作用することができ、先端部材の姿勢変更動作が正確に行われる。
【0017】
リンク作動装置の出力部材にアクチュエータ本体の本体基端ハウジングが固定され、アクチュエータ本体がリンク作動装置により支持されるため、アクチュエータ本体の位置および姿勢が安定する。リンク作動装置は、3組以上のリンク機構と、リンク機構用駆動源とで、出力部材を直交2軸方向に移動自在な2自由度機構が構成される。この2自由度機構は、出力部材の可動範囲を広くとれる。例えば、入力部材の中心軸と出力部材の中心軸の最大折れ角は約±90°であり、入力部材に対する出力部材の旋回角を0°〜360°の範囲で設定できる。入力部材と連結された各リンク機構の回転対偶のうち、2組以上のリンク機構について、出力部材の姿勢を任意に制御するリンク機構用駆動源を設けたことにより、出力部材を任意の姿勢に容易に決められる。リンク機構用駆動源を設けるリンク機構の回転対偶を2組以上としたのは、入力部材に対する出力部材の姿勢を確定するのに必要なためである。
【0018】
このように、リンク作動装置によってアクチュエータ本体を任意の位置および姿勢に安定状態に支持することができ、かつスピンドルガイド部に対する先端部材の姿勢変更を正確に行えるので、きめ細かな加工ができる。具体的には、狭い部分の加工や精度の良い加工ができる。また、加工時間を短縮できる。それにより、手術用として使用する場合に、患者の負担を軽減できる。
【0019】
この発明において、前記回転軸における前記駆動部ハウジング側の端部の軸心を、前記出力部材の球面中心を通る中心軸と平行とするのが良い。
この構成であると、動作変換機構の回転軸と工具回転用の回転軸とを、互いに平行に駆動部ハウジング内に設けることができ、駆動部ハウジング内を簡素な構成にできる。
【0020】
前記動作変換機構は、前記可撓性ワイヤの回転運動を直線往復運動に変換するねじ機構式の直動機構であって、この直動機構である動作変換機構の最終出力部で前記姿勢操作部材に進退動作させてもよい。
動作変換機構がねじ機構式の直動機構であると、小型でコンパクトな構造で大きさ推力を発生することができる。この場合、ねじ機構の回転軸と工具回転用の回転軸とが互いに平行になる。
【0021】
また、前記動作変換機構は、前記可撓性ワイヤの回転により回転するウォームと、このウォームと噛み合うウォームホイールとを組み合わせた構成であり、前記ウォームホイールの一部分である接触部が前記姿勢操作部材と滑り接触して姿勢操作部材を進退動作させてもよい。
動作変換機構がウォームとウォームホイールとを組み合わせた構成としても、小型でコンパクトな構造で大きさ推力を発生することができる。この場合、ウォームと工具回転用の回転軸とが互いに平行になる。
【0022】
この発明において、前記入力部材および出力部材にそれぞれ貫通孔を設け、各貫通孔に前記可撓性ワイヤを通して設けるのが良い。
可撓性ワイヤを入力部材および出力部材の各貫通孔に通して設ければ、各リンク機構がどのような姿勢になっても、可撓性ワイヤが常に各リンク機構の内側を通る。それにより、可撓性ワイヤが他の部材に接触することを防げる。
【0023】
この発明において、前記可撓性ワイヤは、前記中央リンク部材に固定され各リンク機構の内側に位置するワイヤ案内部材により案内するのが良い。
各リンク機構がどのような姿勢になっても、3つ以上のリンク機構のうち少なくとも2つのリンク機構の中央リンク部材は、1つの軌道円上を通る。そのため、中央リンク部材に固定され各リンク機構の内側に位置するワイヤ案内部材により可撓性ワイヤを案内すれば、可撓性ワイヤと他の部材、例えば中央リンク部材や端部リンク部材との干渉を防止できる。
【0024】
この発明において、前記可撓性ワイヤは、可撓性を有するアウタチューブの内部に、両端がそれぞれ回転の入力端および出力端となる可撓性のインナワイヤを複数の転がり軸受によって回転自在に支持し、隣合う転がり軸受間に、これら転がり軸受に対して予圧を与えるばね要素を設けた構造とするのが良い。
可撓性ワイヤの回転軸となるインナワイヤをアウタチューブの内部に設けることで、インナワイヤを保護することができる。インナワイヤを複数の転がり軸受によって回転自在に支持し、隣合う転がり軸受間にばね要素を設けることにより、インナワイヤの固有振動数が低くなることを抑えられ、インナワイヤを高速回転させることが可能である。
【0025】
この発明において、前記可撓性ワイヤの出力側に、この可撓性ワイヤの回転を減速する減速機構を設けるのが良い。
工具回転用駆動源や姿勢変更用駆動源の回転は、減速機構により減速され、動作変換機構の回転軸や工具回転用の回転軸に伝達される。減速機構を設けたため、工具回転用駆動源や姿勢変更用駆動源の出力するトルクが小さくても、動作変換機構の回転軸や工具回転用の回転軸に大きなトルクを発生させることができる。特に、姿勢変更用駆動源の駆動で行われる先端部材の姿勢変更動作は、比較的低い回転数で大きなトルクを必要とするため、減速機構を設けることの効果が大きい。
減速機構を設ければ、上述のように、可撓性ワイヤに作用するトルクが小さくても大きなトルクを発生させられることから、細い可撓性ワイヤを使用できる。その結果、可撓性ワイヤの最小曲率を小さくでき、リンク作動装置の各リンク機構の姿勢の変化に対応しやすい。また、可撓性ワイヤの捩れが小さいため、先端部材に設けた工具の位置決め精度が良い。
【0026】
前記減速機構と前記姿勢操作部材間の動力伝達部材に、この動力伝達部材の動作位置を検出する位置検出手段を設けるのが良い。
位置検出手段によって検出される動力伝達部材の動作位置から、姿勢操作部材の進退位置を推定できる。このように推定された姿勢操作部材の進退位置に関する情報を用いて、姿勢変更用駆動源をフィードバック制御することができる。そのため、可撓性ワイヤに捩れが生じても、正確に先端部材の位置決め制御を行うことができる。
【0027】
位置検出手段を有する場合、前記入力部材および出力部材にそれぞれ貫通孔を設け、各貫通孔に、前記位置検出手段とこの位置検出手段の検出信号を受信する制御部とをつなぐ配線を通して設けるのが良い。
位置検出手段の配線を入力部材および出力部材の各貫通孔に通して設ければ、各リンク機構がどのような姿勢になっても、配線が常に各リンク機構の内側を通る。それにより、配線が他の部材に接触することを防げる。
【0028】
この発明において、前記スピンドルガイド部は湾曲した箇所を有していてもよい。
姿勢操作部材を可撓性にすれば、スピンドルガイド部に湾曲した箇所があっても、ガイド孔内で進退させることができる。
【0029】
この発明の遠隔操作型アクチュエータは、上記作用および効果を有するため医療用手術用のアクチュエータとして好適である。
【発明の効果】
【0030】
この発明の遠隔操作型アクチュエータは、先端に工具を有するアクチュエータ本体を、ベース部材に対して、リンク作動装置により位置および姿勢を変更可能とした遠隔操作型アクチュエータであって、前記アクチュエータ本体は、細長形状のスピンドルガイド部と、このスピンドルガイド部の先端に先端部材連結部を介して姿勢変更自在に取付けられた先端部材と、この先端部材に回転自在に設けた前記工具と、前記スピンドルガイド部の基端が結合された本体基端ハウジングとを備え、前記先端部材は、前記工具を保持するスピンドルを回転自在に支持し、前記スピンドルガイド部は、工具回転用駆動源の回転を前記スピンドルに伝達する回転軸と、両端に貫通したガイド孔とを内部に有し、先端が前記先端部材に接して進退動作することにより前記先端部材を姿勢変更させる姿勢操作部材を前記ガイド孔内に進退自在に挿通し、姿勢変更用駆動源の回転を進退動作に変換して前記姿勢操作部材を進退させる動作変換機構を前記本体基端ハウジング内に設けたものとし、前記リンク作動装置は、前記ベース部材に直接または間接的に結合された入力部材に対し、前記本体基端ハウジングに直接または間接的に結合された出力部材を、3組以上のリンク機構を介して位置および姿勢を変更可能に連結し、前記各リンク機構は、それぞれ前記入力部材および出力部材に一端が回転可能に連結された入力側および出力側の端部リンク部材と、これら入力側および出力側の端部リンク部材の他端をそれぞれ回転可能に連結した中央リンク部材とでなり、前記各リンク機構は、前記各リンク部材を直線で表現した幾何学モデルが、前記中央リンク部材の中央部に対する入力側部分と出力側部分とが対称を成す形状であり、前記3組以上のリンク機構における2組以上のリンク機構に、これら2組以上の各リンク機構を動作させて前記出力部材の姿勢を制御するリンク機構用駆動源を設けたものとし、前記工具回転用駆動源および姿勢変更用駆動源の両方またはいずれか一方を前記リンク作動装置の前記入力部材または前記ベース部材に設け、この駆動源の回転力を前記回転軸または前記動作変換機構へ伝達する可撓性ワイヤを設けたため、アクチュエータ本体の先端に設けられた工具の姿勢を遠隔操作で変更することができ、アクチュエータ本体を確実に支持し、かつアクチュエータ本体が軽量で、その位置および姿勢を正確に変更することができる。
【図面の簡単な説明】
【0031】
【図1】この発明の実施形態にかかる遠隔操作型アクチュエータの概略構成を示す図である。
【図2】この発明の異なる実施形態にかかる遠隔操作型アクチュエータの概略構成を示す図である。
【図3】(A)は図1に示す遠隔操作型アクチュエータの先端部材およびスピンドルガイド部の断面図、(B)はそのIIIB−IIIB断面図、(C)は先端部材と回転軸との連結構造を示す図である。
【図4】(A)は同遠隔操作型アクチュエータの本体基端ハウジングの断面図、(B)はそのIVB−IVB断面図である。
【図5】同遠隔操作型アクチュエータのリンク作動装置の正面図である。
【図6】同リンク作動装置の異なる状態を示す正面図である。
【図7】同リンク作動装置の斜視図である。
【図8】同リンク作動装置のリンク機構の一つを直線で表現した図である。
【図9】同リンク作動装置の入力部材、入力側の端部リンク部材、および中央リンク部材の断面図である。
【図10】(A)同遠隔操作型アクチュエータの可撓性ワイヤの断面図、(B)はXB部拡大図、(C)はXC部拡大図である。
【図11】異なるリンク作動装置の正面図である。
【図12】図11のXII−XII断面図である。
【図13】(A)は内部の構成が異なる本体基端ハウジングの断面図、(B)はそのXIIIB−XIIIB断面図である。
【図14】(A)は先端部材の姿勢を変更する機構が異なる遠隔操作型アクチュエータの先端部材およびスピンドルガイド部の断面図、(B)はそのXIVB−XIVB断面図である。
【図15】(A)は先端部材の姿勢を変更する機構がさらに異なる遠隔操作型アクチュエータの先端部材およびスピンドルガイド部の断面図、(B)はそのXVB−XVB断面図である。
【図16】(A)は先端部材の姿勢を変更する機構がさらに異なる遠隔操作型アクチュエータの先端部材およびスピンドルガイド部の断面図、(B)はそのXVIB−XVIB断面図である。
【図17】(A)は図15および図16に示す遠隔操作型アクチュエータの本体基端ハウジングの断面図、(B)はそのXVIIB−XVIIB断面図である。
【発明を実施するための形態】
【0032】
図1および図2は、この発明のそれぞれ異なる実施形態にかかる遠隔操作型アクチュエータの概略構成を示す図である。この遠隔操作型アクチュエータは、先端に回転式の工具1を有するアクチュエータ本体5が、ベース部材である駆動部ハウジング6に対して、リンク作動装置7により位置および姿勢を変更可能とされている。アクチュエータ本体5は、リンク作動装置7の出力部材105に取付部材100を介して取付けられている。駆動部ハウジング6内には、遠隔操作型アクチュエータの各動作部分を動作させる駆動源41,42,121が設けられている。工具回転用駆動源41および姿勢変更用駆動源42の回転力は、可撓性ワイヤ9A,9Bを介してそれぞれアクチュエータ本体5へ伝達される。各駆動源41,42,121は、駆動部ハウジング6に接続のコントローラ8により制御される。図1と図2とは、互いにアクチュエータ本体5が異なるが、他は同じである。
【0033】
アクチュエータ本体5は、回転式の工具1を保持する先端部材2と、この先端部材2が先端に姿勢変更自在に取付けられた細長形状のスピンドルガイド部3と、このスピンドルガイド部3の基端が結合された本体基端ハウジング4とを備える。この本体基端ハウジング4内には、後記動作変換機構44が設けられている。
【0034】
図3と共に、先端部材2およびスピンドルガイド部3の内部構造について説明する。図3は図1の遠隔操作型アクチュエータについて示すが、図1のようにスピンドルガイド部3が真っ直ぐな形状である場合も、図2のようにスピンドルガイド部3が湾曲した形状である場合も、先端部材2およびスピンドルガイド部3の内部構造は基本的に同じである。
【0035】
先端部材2は、略円筒状のハウジング11の内部に、一対の軸受12によりスピンドル13が回転自在に支持されている。スピンドル13は、先端側が開口した筒状で、中空部に工具1のシャンク1aが嵌合状態に挿入され、回り止めピン14によりシャンク1aが回転不能に結合される。この先端部材2は、先端部材連結部15を介してスピンドルガイド部3の先端に取付けられる。先端部材連結部15は、先端部材2を姿勢変更自在に支持する手段であり、球面軸受からなる。具体的には、先端部材連結部15は、ハウジング11の基端の内径縮径部からなる被案内部11aと、スピンドルガイド部3の先端に固定された抜け止め部材21の鍔状部からなる案内部21aとで構成される。両者11a,21aの互いに接する各案内面F1,F2は、スピンドル13の中心線CL上に曲率中心Oが位置し、基端側ほど径が小さい球面とされている。これにより、スピンドルガイド部3に対して先端部材2が抜け止めされるとともに、姿勢変更自在に支持される。この例は、曲率中心Oを通るX軸回りに先端部材2が姿勢変更する構成であるため、案内面F1,F2が、点Oを通るX軸を軸心とする円筒面であってもよい。
【0036】
スピンドルガイド部3は、工具回転用駆動源41(図1)の回転を前記スピンドル13へ伝達する回転軸22を有する。回転軸22は、スピンドルガイド部3から本体基端ハウジング4にわたって設けられており、その基端が本体基端ハウジング4の基端付近に位置している。この例では、回転軸22はワイヤとされ、ある程度の弾性変形が可能である。ワイヤの材質としては、例えば金属、樹脂、グラスファイバー等が用いられる。ワイヤは単線であっても、撚り線であってもよい。図3(C)に示すように、スピンドル13と回転軸22とは、自在継手等の継手23を介して回転伝達可能に接続されている。継手23は、スピンドル13の閉塞した基端に設けられた溝13aと、回転軸22の先端に設けられ前記溝13aに係合する突起22aとで構成される。上記溝13aと突起22aとの連結箇所の中心は、前記案内面F1,F2の曲率中心Oと同位置である。
【0037】
スピンドルガイド部3は、このスピンドルガイド部3の外郭となる外郭パイプ25を有し、この外郭パイプ25の中心に前記回転軸22が位置する。回転軸22は、それぞれ軸方向に離れて配置された複数の転がり軸受26によって回転自在に支持されている。各転がり軸受26間には、これら転がり軸受26に予圧を発生させるためのばね要素27A,27Bが設けられている。ばね要素27A,27Bは、例えば圧縮コイルばねである。転がり軸受26の内輪に予圧を発生させる内輪用ばね要素27Aと、外輪に予圧を発生させる外輪用ばね要素27Bとがあり、これらが交互に配置されている。前記抜け止め部材21は、固定ピン28により外郭パイプ25のパイプエンド部25aに固定され、その先端内周部で転がり軸受29を介して回転軸22の先端部を回転自在に支持している。パイプエンド部25aは、外郭パイプ25と別部材とし、溶接等により結合してもよい。
【0038】
外郭パイプ25の内径面と回転軸22の間には、両端に貫通する1本のガイドパイプ30が設けられ、このガイドパイプ30の内径孔であるガイド孔30a内に、姿勢操作部材31が進退自在に挿通されている。この例では、姿勢操作部材31は、ワイヤ31aと、その両端に設けた柱状ピン31bとでなる。先端部材2側の柱状ピン31bの先端は球面状で、先端部材2のハウジング11の基端面に当接している。本体基端ハウジング4側の柱状ピン31bの先端も球面状で、後記直動部材51(図4)の前面に当接している。
【0039】
上記姿勢操作部材31が位置する周方向位置に対し180度の位相の位置には、先端部材2のハウジング11の基端面とスピンドルガイド部3の外郭パイプ25の先端面との間に、例えば圧縮コイルばねからなる復元用弾性部材32が設けられている。この復元用弾性部材32は、先端部材2を所定姿勢側へ付勢する作用をする。
【0040】
また、外郭パイプ25の内径面と回転軸22の間には、前記ガイドパイプ30とは別に、このガイドパイプ30と同一ピッチ円C上に、複数本の補強シャフト34が配置されている。これらの補強シャフト34は、スピンドルガイド部3の剛性を確保するためのものである。ガイドパイプ30と補強シャフト34の配列間隔は等間隔とされている。ガイドパイプ30および補強シャフト34は、外郭パイプ25の内径面におよび前記転がり軸受26の外径面に接している。これにより、転がり軸受26の外径面を支持している。
【0041】
図4に、本体基端ハウジング4の内部構造を示す。本体基端ハウジング4内には、前記回転軸22が左右方向に沿って設けられ、その基端が可撓性ワイヤ9Aのインナワイヤ72とカップリング40を介して結合されている。それにより、工具回転用駆動源41(図1)の回転が、回転軸22へ伝達される。工具回転用駆動源41は、例えば電動モータである。また、本体基端ハウジング4には、可撓性ワイヤ9Bにより伝達される姿勢変更用駆動源42(図1)の回転を減速して出力する減速機構43と、この減速機構43の出力を回転運動から直線往復運動に変換する直動機構で動作変換機構44とが設けられている。姿勢変更用駆動源42は、ロータリアクチュエータである。ロータリアクチュエータは、電動式であっても、流体圧式であってもよい。可撓性ワイヤ9A,9Bについては、後で詳しく説明する。
【0042】
動作変換機構44は、ねじ機構を有する直動機構である。具体的には、動作変換機構44は、両端部が軸受45で支持され一端が減速機構43の出力軸43aにカップリング46を介して連結されたボールねじ47と、このボールねじ47に螺合するナット48とでなるボールねじ機構49を備え、前記ナット48に、リニアガイド50によりボールねじ47の軸方向に移動自在に案内された直動部材51が固定されている。直動部材51は、動作変換機構44の最終出力部であって、この直動部材51の先端面からなる接触部51aに姿勢操作部材31の基端が当接している。
【0043】
減速機構43の出力軸43aの回転が、ボールねじ機構49により直線運動に変換されて、直動部材51がリニアガイド50に沿って直線移動する。直動部材51が図4(A)の左側へ移動するときは、直動部材51に押された姿勢操作部材31が前進し、直動部材51が右側へ移動するときは、前記復元用弾性部材32の弾性反発力により押し戻されて姿勢操作部材31が後退する。
【0044】
直動部材51にはリニアスケール52が設置され、このリニアスケール52の目盛を、本体基端ハウジング4に固定されたリニアエンコーダ53が読み取る。これらリニアスケール52とリニアエンコーダ53とで、姿勢操作部材31の進退位置を検出する位置検出手段54を構成する。正確には、リニアエンコーダ53の出力は進退位置推定手段55に送信され、この進退位置推定手段55により姿勢操作部材31の進退位置を推定する。つまり、位置検出手段54は、減速機構43と姿勢操作部材31間の動力伝達手段である直動部材51の動作位置を検出し、この検出結果から姿勢操作部材31の進退位置を推定する。
【0045】
進退位置推定手段55は、姿勢操作部材31の進退位置とリニアエコンコーダ53の出力信号との関係を演算式またはテーブル等により設定した関係設定手段(図示せず)を有し、入力された出力信号から前記関係設定手段を用いて姿勢操作部材31の進退位置を推定する。この進退位置推定手段55は、コントローラ8(図1)に設けられたものであっても、あるいは外部の制御装置に設けられたものであってもよい。コントローラ8は、進退位置推定手段55の検出値に基づき、姿勢変更用駆動源42を制御する。
【0046】
図5および図6は、リンク作動装置の互いに異なる状態を示す正面図、図7はリンク作動装置の斜視図である。リンク作動装置7は、前記駆動部ハウジング6に結合された入力部材104に対し前記アクチュエータ本体5の本体基端ハウジング4に取付部材100を介して結合された出力部材105を、3組のリンク機構101,102,103(以下、「101〜103」と表記する)を介して位置および姿勢を変更可能に連結してある。なお、図5および図6では、3組のリンク機構101〜103のうち1組のリンク機構101のみを表示している。
【0047】
各リンク機構101〜103は、入力側の端部リンク部材101a,102a,103a(以下、「101a〜103a」と表記する)、中央リンク部材101b,102b,103b(以下、「101b〜103b」と表記する)、および出力側の端部リンク部材101c,102c,103c(以下、「101c〜103c」と表記する)で構成され、4つの回転対偶からなる3節連鎖のリンク機構をなす。具体的には、入力側の端部リンク部材101a〜103aの一端が入力部材104に回転可能に連結され、出力側の端部リンク部材101c〜103cの一端が出力部材105に回転可能に連結され、入力側の端部リンク部材101a〜103aおよび出力側の端部リンク部材101c〜103cの他端が中央リンク部材101b〜103bの両端にそれぞれ回転可能に連結されている。
【0048】
入力側および出力側の端部リンク部材101a〜103a,101c〜103cは球面リンク構造で、3組のリンク機構101〜103における球面リンク中心PA,PCは一致しており、また、その中心PA,PCからの距離も同じである。端部リンク部材101a〜103a,101c〜103cと中央リンク部材101b〜103bとの連結部となる回転対偶軸は、ある交差角をもっていてもよいし、平行であってもよい。
【0049】
つまり、3組のリンク機構101〜103は、幾何学的に同一形状をなす。幾何学的に同一形状とは、各リンク部材101a〜103a,101b〜103b,101c〜103cを直線で表現した幾何学モデルが、中央リンク部材101b〜103bの中央部に対する入力側部分と出力側部分が対称を成す形状であることを言う。図8は、一つのリンク機構102を直線で表現した図である。
【0050】
この実施形態のリンク機構101〜103は回転対称タイプで、入力部材104および端部リンク部材101a〜103aと、出力部材105および端部リンク部材101c〜103cとの位置関係が、中央リンク部材101b〜103bの中心線Aに対して回転対称となる位置構成になっている。図5は、入力部材104の中心軸Bと出力部材105の中心軸Cとが同一線上にある状態を示し、図6は、入力部材104の中心軸Bに対して出力部材105の中心軸Cが所定の作動角をとった状態を示す。各リンク機構101〜103の姿勢が変化しても、入力側と出力側の球面リンク中心PA,PC間の距離Lは変化しない。
【0051】
図9に示すように、入力部材104は、その中心部に可撓性ワイヤ挿通用の貫通孔106が軸方向に沿って形成され、また、大きな角度がとれるように外形を球面状としたドーナツ形状をなし、さらに、半径方向に軸部材嵌挿用の貫通孔108を円周方向等間隔で形成し、その貫通孔108に軸受109を介して軸部材110を嵌挿させた構造を具備する。出力部材105も同じ構造で、その中心部に可撓性ワイヤ挿通用の貫通孔106(図7)が軸方向に沿って形成されている。
【0052】
軸受109は、入力部材104の貫通孔108に内嵌された軸受外輪と、軸部材110に外嵌された軸受内輪と、軸受外輪と軸受内輪間に回転自在に介挿されたボール等の転動体とからなる。軸部材110の外側端部は、入力部材104から突出し、その突出部に端部リンク部材101a,102a,103aおよびギア部材111が結合され、ナット113による締付けでもって軸受109に所定の予圧量を付与して固定されている。ギア部材111は、後述するリンク機構101〜103の角度制御機構120の一部を構成する。入力部材104に対して軸部材110を回転自在に支承する軸受109は、止め輪112により入力部材104から抜け止めされている。
【0053】
なお、軸部材110と、端部リンク部材101a〜103aおよびギア部材111とは、加締め等により結合される。キーあるいはセレーションにより結合することが可能である。その場合、結合構造の緩みを防止でき、伝達トルクの増加を図ることができる。
【0054】
上記ギア部材111を軸部材110の外側端部に設けたことで、この入力部材104の可撓性ワイヤ挿通用の貫通孔106とリンク機構101〜103の内側に広い内側空間Sが形成されている。この内側空間Sには、可撓性ワイヤ9A,9Bが通して設けられる。
【0055】
軸受109としては、図示のように2個の玉軸受を配設する以外に、アンギュラ玉軸受、ローラ軸受、あるいは滑り軸受を使用することも可能である。なお、出力部材105は、軸部材110の外側端部にギア部材111が設けられていない点を除いて、入力部材104と同一構造である。軸部材110の円周方向位置は等間隔でなくてもよいが、入力部材104および出力部材105は同じ円周方向の位置関係とする必要がある。これら入力部材104および出力部材105は、3組のリンク機構101〜103で共有され、各軸部材110に端部リンク部材101a〜103a,101c〜103cが連結される。
【0056】
端部リンク部材101a〜103a,101c〜103cはL字状をなし、一辺を入力部材104および出力部材105から突出する軸部材110に結合し、他辺を中央リンク部材101b〜103bに連結する。端部リンク部材101a〜103a,101c〜103cは、大きな角度がとれるようにリンク中心側に位置する軸部115の屈曲基端内側が大きくカットされた形状を有する。
【0057】
中央リンク部材101b〜103bはほぼL字状をなし、両辺に貫通孔114を有する。この中央リンク部材101b〜103bは、大きな角度がとれるようにその周方向側面がカットされた形状を有する。端部リンク部材101a〜103a,101c〜103cの他辺から一体的に屈曲成形された軸部115を、軸受116を介して中央リンク部材101b〜103bの両辺の貫通孔114に挿通する。
【0058】
この軸受116は、中央リンク部材101b〜103bの貫通孔114に内嵌された軸受外輪と、端部リンク部材101a〜103a,101c〜103cの軸部115に外嵌された軸受内輪と、軸受外輪と軸受内輪間に回転自在に介挿されたボール等の転動体とからなる。端部リンク部材101a〜103a,101c〜103cに対して中央リンク部材101b〜103bを回転自在に支承する軸受116は、止め輪117により中央リンク部材101b〜103bから抜け止めされている。
【0059】
前記リンク機構101〜103において、入力部材104および出力部材105の軸部材110の角度、長さ、および端部リンク部材101a〜103a,101c〜103cの幾何学的形状が入力側と出力側で等しく、また、中央リンク部材101b〜103bについても入力側と出力側で形状が等しいとき、中央リンク部材101b〜103bの対称面に対して中央リンク部材101b〜103bと、入出力部材104,105と連結される端部リンク部材101a〜103a,101c〜103cとの角度位置関係を入力側と出力側で同じにすれば、幾何学的対称性から入力部材104および端部リンク部材101a〜103aと、出力部材105および端部リンク部材101c〜103cとは同じに動き、入力側と出力側は同じ回転角になって等速で回転することになる。この等速回転するときの中央リンク部材101b〜103bの対称面を等速二等分面という。
【0060】
このため、入出力部材104,105を共有する同じ幾何学形状のリンク機構101〜103を円周上に複数配置させることにより、複数のリンク機構101〜103が矛盾なく動ける位置として中央リンク部材101b〜103bが等速二等分面上のみの動きに限定され、これにより入力側と出力側は任意の作動角をとっても等速回転が得られる。
【0061】
各リンク機構101〜103における4つの回転対偶の回転部、つまり、端部リンク部材101a〜103a,101c〜103cと入出力部材104,105の2つの連結部分、および端部リンク部材101a〜103a,101c〜103cと中央リンク部材101b〜103bの2つの連結部分を軸受構造とすることにより、その連結部分での摩擦抵抗を抑えて回転抵抗の軽減を図ることができ、滑らかな動力伝達を確保できると共に耐久性を向上できる。
【0062】
この軸受構造では予圧を付与することにより、ラジアル隙間とスラスト隙間をなくし、連結部でのがたつきを抑えることができ、入出力間の回転位相差がなくなり等速性を維持できると共に振動や異音の発生を抑制できる。特に、前記軸受構造において、軸受隙間を負すきまとすることにより、入出力間に生じるバックラッシュを少なくすることができる。
【0063】
このリンク作動装置7は、リンク機構101〜103の2つ以上のリンク機構について、入力部材104に対して入力側の端部リンク部材101a〜103aの角度を制御することにより、入力部材105の2自由度の姿勢を制御する。図5〜図9の例では、全リンク機構101〜103の端部リンク部材101a〜103aの角度を制御する。端部リンク部材101a〜103aの角度制御機構120は、図7に示すように、駆動部ハウジング6にリンク機構用駆動源121を固定して設け、このリンク機構用駆動源121の駆動部ハウジング6から突出する出力軸122に傘歯車123を取付け、この傘歯車123に、入力部材104の軸部材110に取付けた前記ギア部材111のギア部を噛み合わせてある。リンク機構用駆動源121は、例えば電動モータである。リンク機構用駆動源121を回転させることにより、その回転が傘歯車123およびギア部材111を介して軸部材110に伝えられ、入力部材104に対して端部リンク部材101a〜103aが角度変更する。
【0064】
このリンク作動装置7の構成によれば、入力部材104に対する出力部材105の可動範囲を広くとれる。例えば、入力部材104の中心軸Bと出力部材105の中心軸Cの最大折れ角を約±90°とすることができる。また、入力部材104に対する出力部材105の旋回角を0°〜360°の範囲で設定できる。入力部材104と連結された各リンク機構101〜103の回転対偶に、出力部材105の姿勢を任意に制御するリンク機構用駆動源121を設けたことにより、出力部材105を任意の姿勢に容易に決められる。入力部材104から出力部材105へ等速で力が伝達されるため、出力部材105の動作がスムーズである。この実施形態では、入力部材104とリンク機構101〜103の各組の回転対偶にリンク機構用駆動源121を設けてあるが、2組以上にリンク機構用駆動源121を設ければ、入力部材104に対する出力部材105の姿勢を確定することができる。
【0065】
また、この構成のリンク作動装置7は、入出力部材104,105に軸受外輪を内包すると共に軸受内輪を端部リンク部材101a〜103a,101c〜103cと結合させて、入出力部材104,105内に軸受構造を埋設したので、全体の外形を大きくすることなく、入出力部材104,105の外形を拡大することができる。そのため、入力部材104を駆動部ハウジング6に取付けるための取付スペース、並びに出力部材105を本体基端ハウジング4に取付けるための取付スペースの確保が容易である。
【0066】
図10(A)〜(C)に、可撓性ワイヤ9A,9Bの詳しい構造を示す。可撓性ワイヤ9A,9Bは、可撓性のアウタチューブ71と、このアウタチューブ71の内部の中心位置に設けられた可撓性のインナワイヤ72と、このインナワイヤ72を前記アウタチューブ71に対して回転自在に支持する複数の転がり軸受73とを備える。インナワイヤ72の両端は、それぞれ回転の入力端72aおよび出力端72bとなる。アウタチューブ71は、例えば樹脂製である。インナワイヤ72としては、例えば金属、樹脂、グラスファイバー等のワイヤが用いられる。ワイヤは単線であっても、撚り線であってもよい。
【0067】
各転がり軸受73はアウタチューブ71の中心線に沿って一定の間隔を開けて配置されており、隣合う転がり軸受73間に、これら転がり軸受73に対して予圧を与えるばね要素74I,74Oが設けられている。ばね要素74I,74Oは、例えば圧縮コイルばねであり、インナワイヤ72の外周を巻線が囲むように設けられる。ばね要素は、転がり軸受73の内輪に予圧を発生させる内輪用ばね要素74Iと、外輪に予圧を発生させる外輪用ばね要素74Oとがあり、これらが交互に配置されている。
【0068】
前記アウタチューブ71の両端には、このアウタチューブ71を他の部材に結合する継手75が設けられている。継手75は、雄ねじ部材76と雌ねじ部材73とで構成される。
雄ねじ部材76は、内周に貫通孔77が形成された筒状の部材であって、軸方向中央部の外周に雄ねじ部78が形成されている。雄ねじ部材76の軸方向の一方端には、内径および外径が同一径で軸方向に延びる円筒部79が設けられている。この円筒部79の外径は、アウタチューブ71の内径部に嵌合する寸法とされている。また、軸方向の他方端には、外径側に拡がるフランジ部80が設けられている。このフランジ部80は他の部材に結合する結合手段であって、円周方向複数箇所に、ボルト等の固定具を挿入するための通孔81が形成されている。前記貫通孔77は、円筒部79側からフランジ部80側に向かって、小径部77a、中径部77b、大径部77cの順に段階的に内径が大きくなっている。中径部77bには、インナワイヤ72を回転自在に支持する転がり軸受82が嵌め込まれる。
【0069】
雌ねじ部材83は、円筒状部84と、この円筒状部84の一端から内径側へ延びるつば状部85とを有する筒状の部材であって、円筒状部84の内周先端側に、前記雄ねじ部材76の雄ねじ部78に螺合する雌ねじ部86が形成されている。つば状部85の内径は、アウタチューブ71が外周に嵌合する寸法とされている。
【0070】
アウタチューブ71を他の部材に結合する際には、まず、雄ねじ部材76の円筒部79をアウタチューブ71の内径部に嵌合させ、かつ雌ねじ部材83のつば状部85をアウタチューブ71の同一端の外径部に嵌合させた状態で、雄ねじ部材76の雄ねじ部78と雌ねじ部材83の雌ねじ部86とを螺合させる。これにより、雄ねじ部材76の円筒部79と雌ねじ部材83のつば状部85とで、アウタチューブ71の一端を内外から挟み込んで固定する。インナワイヤ72は、雄ねじ部材76の貫通孔77に挿通し、貫通孔77の中径部77bに嵌め込んだ転がり軸受82によって支持させる。次いで、雄ねじ部材76のフランジ部80を、結合対象である他の部材に結合する。結合対象である他の部材は、可撓性ワイヤ9Aの場合、工具回転用駆動源41のハウジングと本体基端ハウジング4であり、可撓性ワイヤ9Bの場合、姿勢変更用駆動源42と減速機構43のハウジングである。この結合は、通孔81に挿通したボルト等の固定具(図示せず)によって行う。以上で、アウタチューブ71と他の部材との結合が完了し、図10の状態となる。
【0071】
この状態から、雄ねじ部78と雌ねじ部86の螺合を外すことで、雄ねじ部材76の円筒部79および雌ねじ部材83のつば状部85による拘束からアウタチューブ71が解放され、アウタチューブ71と他の部材との結合が解除される。これらアウタチューブ71と他の部材との結合操作およびその解除操作は容易である。
【0072】
また、アウタチューブ71と継手75を結合した状態で、雄ねじ部材76の結合手段(フランジ部80)により可撓性ワイヤ9A,9Bと他の部材との結合操作および解除操作を行っても良い。これら可撓性ワイヤ9A,9Bと他の部材との結合操作およびその解除操作はさらに容易となる。
【0073】
前記インナワイヤ72の入力端72aおよび出力端72bには、回転軸体88と連結するカップリング89が設けられている。可撓性ワイヤ9Aのインナワイヤ72の入力端72aに連結される回転軸体88は工具回転用駆動源41の出力軸41a(図5)であり、出力端72bに連結される回転軸体88は回転軸22(図4)の基端である。また、可撓性ワイヤ9Bのインナワイヤ72の入力端72aに連結される回転軸体88は姿勢変更用駆動源42の出力軸42a(図5)であり、出力端72bに連結される回転軸体88は減速機構43の入力軸43b(図4)である。
【0074】
図例のカップリング89は、軸方向に貫通する貫通孔89aを有し、この貫通孔89aと外周との間に軸方向に離れて2つのねじ孔89bを設けてある。前記貫通孔89aにインナワイヤ72および回転軸体88を両側から挿入し、ねじ孔89bに螺着したボルト等のねじ部材(図示せず)の先端をインナワイヤ72および回転軸体88に押し付けることで、これらインナワイヤ72および回転軸体88をカップリング89に固定して、インナワイヤ72と回転軸体88とを連結する。カップリング89は、インナワイヤ72と回転軸体88とを回転伝達可能に連結できればよく、上記以外の構成であってもよい。
【0075】
この構成の可撓性ワイヤ9A,9Bは、隣合う転がり軸受73間に、これら転がり軸受73に対して予圧を与えるばね要素74I,74Oを設けたことにより、インナワイヤ72の固有振動数が低くなることを抑えられ、インナワイヤ72を高速回転させることが可能である。内輪用ばね要素74Iおよび外輪用ばね要素74Oは、インナワイヤ72の長さ方向にわたり交互に配置されているため、アウタチューブ71の径を大きくせずに、ばね要素74I,74Oを設けることができる。
【0076】
また、可撓性ワイヤ9Bの場合、インナワイヤ72の出力側にこのインナワイヤ72の回転を減速して出力する減速機構43が設けられる、インナワイヤ72で伝達するトルクが小さくても、大きなトルクを発生できる。そのため、コンパクトな構造で、可撓性の高い可撓性ワイヤ9Bを実現できる。
【0077】
この遠隔操作型アクチュエータの動作を説明する。
アクチュエータ本体5はリンク作動装置7により支持されており、リンク機構用駆動源121の駆動により、アクチュエータ本体5を直交2軸方向に移動させて、適正な位置および姿勢に保持する。リンク作動機構7は、入力部材104に対する出力部材105の可動範囲が広く、アクチュエータ本体5を任意の姿勢に容易に決められる。また、リンク作動装置7でアクチュエータ本体5を支持しているため、アクチュエータ本体5の位置および姿勢が安定する。
【0078】
工具回転用駆動源41を駆動すると、その回転が可撓性ワイヤ9Aのインナワイヤ72および回転軸22を介してスピンドル13に伝達されて、スピンドル13と共に工具1が回転する。この回転する工具1により、骨等を切削加工する。その際、姿勢変更用駆動源42をコントローラ8により制御して、遠隔操作で先端部材2の姿勢変更を行う。
【0079】
例えば、姿勢操作部材31を先端側へ進出させると、姿勢操作部材31によって先端部材2のハウジング11が押されて、先端部材2は図3(A)において先端側が下向きとなる側へ案内面F1,F2に沿って姿勢変更する。逆に、姿勢操作部材31を後退させると、復元用弾性部材32の弾性反発力によって先端部材2のハウジング11が押し戻され、先端部材2は図3(A)において先端側が上向きとなる側へ案内面F1,F2に沿って姿勢変更する。このとき、先端部材連結部15には、姿勢操作部材31の圧力、復元用弾性部材32の弾性反発力、および抜け止め部材21からの反力が作用しており、これらの作用力の釣り合いにより先端部材2の姿勢が決定される。
【0080】
姿勢操作部材31の進退は、詳しくは次のようにして行われる。すなわち、前記姿勢変更用駆動源42の回転が、可撓性ワイヤ9Bのインナワイヤ72を介して減速機構43に伝達され、減速機構43により減速される。さらに、減速機構43の出力軸43bの回転運動が動作変換機構44により直線往復運動に変換されて、出力部材である直動部材51に伝達される。この直動部材51の進退動作が接触部51aより姿勢操作部材31の基端へ伝達されて、姿勢操作部材31が進退動作する。減速機構43が設けられているため、姿勢変更用駆動源42の出力するトルクが小さくても、大きなトルクを発生させて、直動部材51に大きな作用力を与えることができる。そのため、姿勢操作部材31を確実に進退動作させることができ、先端部材2に設けた工具1を正確に位置決めできる。また、アクチュエータ本体5に工具回転用駆動源41や姿勢変更用駆動源42を設けないため、アクチュエータ本体5の重量を軽くできる。その結果、リンク機構101〜103に作用する慣性モーメントが小さくなり、リンク機構用駆動源121の小型化が可能になる。
【0081】
先端部材2の姿勢は、位置検出手段54により検出される姿勢操作部材31の進退位置から求められる。位置検出手段54の検出値、正確にはリニアエンコーダ53の検出値をコントローラ8にフィードバックさせて、姿勢変更用駆動源42の出力量を制御するフィードバック制御を行えば、工具1の位置決め精度を向上させることができる。
【0082】
姿勢操作部材31はガイド孔30aに挿通されているため、姿勢操作部材31が長手方向と交差する方向に位置ずれすることがなく、常に先端部材2に対し適正に作用することができ、先端部材2の姿勢変更動作が正確に行われる。また、姿勢操作部材31は可撓性であるため、スピンドルガイド部3が湾曲部を有する場合でも先端部材2の姿勢変更動作が確実に行われる。さらに、スピンドル13と回転軸22との連結箇所の中心が案内面F1,F2の曲率中心Oと同位置であるため、先端部材2の姿勢変更によって回転軸22に対して押し引きする力がかからず、先端部材2が円滑に姿勢変更できる。
【0083】
この遠隔操作型アクチュエータは、例えば人工関節置換手術において骨の髄腔部を削るのに使用されるものであり、施術時には、先端部材2の全部または一部が患者の体内に挿入して使用される。このため、上記のように先端部材2の姿勢を遠隔操作で変更できれば、常に工具1を適正な姿勢に保持した状態で骨の加工をすることができ、人工関節挿入用穴を精度良く仕上げることができる。また、アクチュエータ本体5が安定状態に支持されるので、操作がし易く、加工時間を短縮できる。それにより、手術用として使用する場合に、患者の負担を軽減できる。
【0084】
細長形状であるスピンドルガイド部3には、回転軸22および姿勢操作部材31を保護状態で設ける必要があるが、外郭パイプ25の中心部に回転軸22を設け、外郭パイプ25と回転軸22との間に、姿勢操作部材31を収容したガイドパイプ30と補強シャフト34とを円周方向に並べて配置した構成としたことにより、回転軸22および姿勢操作部材31を保護し、かつ内部を中空して軽量化を図りつつ剛性を確保できる。また、全体のバランスも良い。
【0085】
回転軸22を支持する転がり軸受26の外径面を、ガイドパイプ30と補強シャフト34とで支持させたため、余分な部材を用いずに転がり軸受26の外径面を支持できる。また、ばね要素27A,27Bにより転がり軸受26に予圧がかけられているため、ワイヤからなる回転軸22を高速回転させることができる。そのため、スピンドル13を高速回転させて加工することができ、加工の仕上がりが良く、工具1に作用する切削抵抗を低減させられる。ばね要素27A,27Bは隣合う転がり軸受26間に設けられているので、スピンドルガイド部3の径を大きくせずにばね要素27A,27Bを設けることができる。
【0086】
以上、アクチュエータ本体5のスピンドルガイド部3が直線形状である図1の例について説明したが、姿勢操作部材31が可撓性であるため、図2のようにスピンドルガイド部3が湾曲していても、先端部材2の姿勢変更動作を確実に行える。スピンドルガイド部3の一部分のみが湾曲形状であってもよい。スピンドルガイド部3が湾曲形状であれば、直線形状では届きにくい骨の奥まで先端部材2を挿入することが可能となる場合があり、人工関節置換手術における人工関節挿入用穴の加工を精度良く仕上げることが可能になる。
【0087】
スピンドルガイド部3を湾曲形状とする場合、外郭パイプ25、ガイドパイプ30、および補強シャフト34を湾曲形状とする必要がある。また、回転軸22は変形しやすい材質を用いるのが良く、例えば形状記憶合金が適する。
【0088】
図11および図12はリンク作動装置の異なる構成を示す。このリンク作動装置7は、1つのリンク機構101の中央リンク部材101bにワイヤ案内部材141を固定して設け、このワイヤ案内部材141により可撓性ワイヤ9A,9Bを案内するようにしたものである。ワイヤ案内部材141は、基端が中央リンク部材101bに固定された支持部141aと、この支持部141aの先端に一体に設けたC字状の案内部141bとでなる。案内部141bの切れ目141baは可撓性ワイヤ9A,9Bの直径よりも小さい寸法であり、中央に可撓性ワイヤ9A,9Bを通す円形の開口141cが形成されている。この開口141cの中心は、中央リンク部材101bの軌道円143の中心144と合致する位置とされている。
【0089】
各リンク機構101〜103がどのような姿勢になっても、3つ以上のリンク機構のうち少なくとも2つのリンク機構の中央リンク部材は、1つの軌道円143上を通る。そのため、中央リンク部材101bに固定したワイヤ案内部材141により可撓性ワイヤ9A,9Bを案内すれば、可撓性ワイヤ9A,9Bと他の部材、例えば他の中央リンク部材102b,103bや端部リンク部材102a,102c,103a,103cとの干渉を防止できる。また、中央リンク部材101bの軌道円143の中心144は、常に入力側と出力側の球面リンク中心を結ぶ直線上に位置し、球面リンク中心間の距離Lは、各リンク機構101〜103の姿勢が変化しても一定であるため、上記のようにワイヤ案内部材141の案内部141bの中心を中央リンク部材101bの軌道円143の中心144と合致する位置としたことで、可撓性ワイヤ9A,9Bを最短距離で距離変動のない位置に配置することができる。
【0090】
図13は、動作変換機構の異なる例を示す。この動作変換機構44は、ウォーム57とウォームホイール58とを組み合わせた構成である。具体的には、動作変換機構44は、両端部が軸受45で支持され一端が減速機構43の出力軸43aにカップリング46を介して連結されたウォーム57と、支持軸59に支持され前記ウォーム57と噛み合うウォームホイール58とを備える。ウォームホイール58は動作変換機構44の最終出力部であって、このウォームホイール58の先端面からなる接触部58aに姿勢操作部材31の基端が当接している。なお、ウォームホイール58は、円周の一部にだけ歯が設けられ形状をしており、回転軸22が挿通される開口58bを有している。
【0091】
姿勢変更用駆動源42の出力軸42aの回転が、減速機構43で減速され、さらにウォーム57とウォームホイール58とでなる減速機構により減速されて、ウォームホイール58へ伝達される。ウォームホイール58の接触部58aが姿勢操作部材31に対して滑り接触しながら、ウォームホイール58が揺動することにより、姿勢操作部材31に進退動作を与える。すなわち、接触部58aが図12(A)の左側へ回動するときは、接触部58aに押された姿勢操作部材31が前進し、接触部58aが右側へ回動するときは、前記復元用弾性部材32の弾性反発力により押し戻されて姿勢操作部材31が後退する。
【0092】
姿勢操作部材31の進退位置は、位置検出手段54により検出される。この図例の場合、位置検出手段54は、ウォームホイール58の背面に設けた被検出部60と、本体基端ハウジング4に固定して設けられ前記被検出部60の変位を検出する検出部61とでなる。位置検出手段54は、光学式であっても磁気式であってもよい。正確には、検出部61の出力は進退位置推定手段55に送信され、この進退位置推定手段55により姿勢操作部材31の進退位置を推定する。つまり、位置検出手段54は、減速機構43と姿勢操作部材31間の動力伝達手段であるウォームホイール58の動作位置を検出し、この検出結果から姿勢操作部材31の進退位置を推定する。
【0093】
図14は、先端部材2の姿勢を変更させる構成が異なる実施形態を示す。この遠隔操作型アクチュエータは、外郭パイプ25内の互いに180度の位相にある周方向位置に2本のガイドパイプ30を設け、そのガイドパイプ30の内径孔であるガイド孔30a内に、前記同様の姿勢操作ワイヤ31aおよび柱状ピン31bからなる姿勢操作部材31が進退自在に挿通してある。2本のガイドパイプ30間には、ガイドパイプ30と同一ピッチ円C上に複数本の補強シャフト34が配置されている。復元用弾性部材32は設けられていない。案内面F1,F2は、曲率中心が点Oである球面、または点Oを通るX軸を軸心とする円筒面である。
【0094】
駆動部4(図示せず)には、2つの姿勢操作部材31をそれぞれ個別に進退操作させる2つの姿勢変更用駆動源42(図示せず)が設けられており、これら2つの姿勢変更用駆動源42を互いに逆向きに駆動することで先端部材2の姿勢変更を行う。例えば、図14における上側の姿勢操作部材31を先端側へ進出させ、かつ下側の姿勢操作部材31を後退させると、上側の姿勢操作部材31によって先端部材2のハウジング11が押されることにより、先端部材2は図14(A)において先端側が下向きとなる側へ案内面F1,F2に沿って姿勢変更する。逆に、両姿勢操作部材31を逆に進退させると、下側の姿勢操作部材31によって先端部材2のハウジング11が押されることにより、先端部材2は図14(A)において先端側が上向きとなる側へ案内面F1,F2に沿って姿勢変更する。その際、先端部材連結部15には、上下2つの姿勢操作部材31の圧力、および抜け止め部材21からの反力が作用しており、これらの作用力の釣り合いにより先端部材2の姿勢が決定される。この構成では、2つの姿勢操作部材31で先端部材2のハウジング11に加圧されるため、1つ姿勢操作部材31だけで加圧される前記実施形態に比べ、先端部材2の姿勢安定性を高めることができる。
【0095】
図15は、先端部材2の姿勢を変更させる構成がさらに異なる実施形態を示す。この遠隔操作型アクチュエータは、外郭パイプ25内の互いに120度の位相にある周方向位置に3本のガイドパイプ30を設け、そのガイドパイプ30の内径孔であるガイド孔30a内に前記同様の姿勢操作部材31が進退自在に挿通してある。3本のガイドパイプ30間には、ガイドパイプ30と同一ピッチ円C上に複数本の補強シャフト34が配置されている。復元用弾性部材32は設けられていない。案内面F1,F2は曲率中心が点Oである球面であり、先端部材2は任意方向に傾動可能である。
【0096】
駆動部4には、3つの姿勢操作部材31(31U,31L,31R)をそれぞれ個別に進退操作させる3つの姿勢変更用駆動源(図示せず)が設けられており、これら3つの姿勢変更用駆動源を互いに連係させて駆動することで先端部材2の姿勢変更を行う。
【0097】
例えば、図15における上側の1つの姿勢操作部材31Uを先端側へ進出させ、かつ他の2つの姿勢操作部材31L,31Rを後退させると、上側の姿勢操作部材31Uによって先端部材2のハウジング11が押されることにより、先端部材2は図15(A)において先端側が下向きとなる側へ案内面F1,F2に沿って姿勢変更する。このとき、各姿勢操作部材31の進退量が適正になるよう、各姿勢変更用駆動源が制御される。各姿勢操作部材31を逆に進退させると、左右の姿勢操作部材31L,31Rによって先端部材2のハウジング11が押されることにより、先端部材2は図15(A)において先端側が上向きとなる側へ案内面F1,F2に沿って姿勢変更する。
【0098】
また、上側の姿勢操作部材31Uは静止させた状態で、左側の姿勢操作部材31Lを先端側へ進出させ、かつ右側の姿勢操作部材31Rを後退させると、左側の姿勢操作部材31Lによって先端部材2のハウジング11が押されることにより、先端部材2は右向き、すなわち図15(A)において紙面の裏側向きとなる側へ案内面F1,F2に沿って姿勢変更する。左右の姿勢操作部材31L,31Rを逆に進退させると、右の姿勢操作部材31Rによって先端部材2のハウジング11が押されることにより、先端部材2は左向きとなる側へ案内面F1,F2に沿って姿勢変更する。
【0099】
このように姿勢操作部材31を円周方向の3箇所に設けることにより、先端部材2を上下左右の2軸(X軸、Y軸)の方向に姿勢変更することができる。その際、先端部材連結部15には、3つの姿勢操作部材31の圧力、および抜け止め部材21からの反力が作用しており、これらの作用力の釣り合いにより先端部材2の姿勢が決定される。この構成では、3つの姿勢操作部材31で先端部材2のハウジング11に加圧されるため、さらに先端部材2の姿勢安定性を高めることができる。姿勢操作部材31の数をさらに増やせば、先端部材2の姿勢安定性をより一層高めることができる。
【0100】
図16は図15に示すものと比べてスピンドルガイド部3の内部構造が異なる実施形態を示す。この遠隔操作型アクチュエータのスピンドルガイド部3は、外郭パイプ25の中空孔24が、中心部の円形孔部24aと、この円形孔部24aの外周における互いに120度の位相をなす周方向位置から外径側へ凹んだ3つの溝状部24bとでなる。溝状部24bの先端の周壁は、断面半円形である。そして、円形孔部24aに回転軸22と転がり軸受26とが収容され、各溝状部24bに姿勢操作部材31(31U,31L,31R)が収容されている。
【0101】
外郭パイプ25を上記断面形状としたことにより、外郭パイプ25の溝状部24b以外の箇所の肉厚tを厚くなり、外郭パイプ25の断面2次モーメントが大きくなる。すなわち、スピンドルガイド部3の剛性が高まる。それにより、先端部材2の位置決め精度を向上させられるとともに、切削性を向上させられる。また、溝状部24bにガイドパイプ30を配置したことにより、ガイドパイプ30の円周方向の位置決めを容易に行え、組立性が良好である。
【0102】
図15や図16のように姿勢操作部材31が周方向の3箇所に設けられている場合、動作変換機構44を例えば図17のように構成することができる。すなわち、各姿勢操作部材31(31U,31L,31R)をそれぞれ個別に進退操作させる3つの姿勢変更用駆動源(図示せず)にそれぞれ対応させて、3つの動作変換機構44(44U,44L,44R)を設ける。各姿勢変更用駆動源は駆動部ハウジング(図示せず)に設けられ、その回転が、可撓性ワイヤ9Bを介して減速機構43へ伝達され、減速機構43により減速されてから、動作変換機構44へ伝達される。図17は、動作変換機構を直動機構型とした例である。各動作変換機構44は、回転軸22を中心にして放射状に配置してある。
【符号の説明】
【0103】
1…工具
2…先端部材
3…スピンドルガイド部
4…本体基端ハウジング
5…アクチュエータ本体
6…駆動部ハウジング(ベース部材)
7…リンク作動装置
8…コントローラ
9A,9B…可撓性ワイヤ
13…スピンドル
15…先端部材連結部
22…回転軸
30…ガイドパイプ
30a…ガイド孔
31…姿勢操作部材
41…工具回転用駆動源
42…姿勢変更用駆動源
43…減速機構
44…動作変換機構
49…ボールねじ機構
54…位置検出手段
57…ウォーム
58…ウォームホイール
71…アウタチューブ
72…インナワイヤ
73…転がり軸受
74I…内輪用ばね要素
74O…外輪用ばね要素
101,102,103…リンク機構
101a,102a,103a…入力側の端部リンク部材
101b,102b,103b…中央リンク部材
101c,102c,103c…出力側の端部リンク部材
104…入力部材
105…出力部材
106…可撓性ワイヤ挿通用の貫通孔
121…リンク機構用駆動源
141…ワイヤ案内部材
143…中央リンク部材の軌道円
【特許請求の範囲】
【請求項1】
先端に工具を有するアクチュエータ本体を、ベース部材に対して、リンク作動装置により位置および姿勢を変更可能とした遠隔操作型アクチュエータであって、
前記アクチュエータ本体は、細長形状のスピンドルガイド部と、このスピンドルガイド部の先端に先端部材連結部を介して姿勢変更自在に取付けられた先端部材と、この先端部材に回転自在に設けた前記工具と、前記スピンドルガイド部の基端が結合された本体基端ハウジングとを備え、前記先端部材は、前記工具を保持するスピンドルを回転自在に支持し、前記スピンドルガイド部は、工具回転用駆動源の回転を前記スピンドルに伝達する回転軸と、両端に貫通したガイド孔とを内部に有し、先端が前記先端部材に接して進退動作することにより前記先端部材を姿勢変更させる姿勢操作部材を前記ガイド孔内に進退自在に挿通し、姿勢変更用駆動源の回転を進退動作に変換して前記姿勢操作部材を進退させる動作変換機構を前記本体基端ハウジング内に設けたものとし、
前記リンク作動装置は、前記ベース部材に直接または間接的に結合された入力部材に対し、前記本体基端ハウジングに直接または間接的に結合された出力部材を、3組以上のリンク機構を介して位置および姿勢を変更可能に連結し、前記各リンク機構は、それぞれ前記入力部材および出力部材に一端が回転可能に連結された入力側および出力側の端部リンク部材と、これら入力側および出力側の端部リンク部材の他端をそれぞれ回転可能に連結した中央リンク部材とでなり、前記各リンク機構は、前記各リンク部材を直線で表現した幾何学モデルが、前記中央リンク部材の中央部に対する入力側部分と出力側部分とが対称を成す形状であり、前記3組以上のリンク機構における2組以上のリンク機構に、これら2組以上の各リンク機構を動作させて前記出力部材の姿勢を制御するリンク機構用駆動源を設けたものとし、
前記工具回転用駆動源および姿勢変更用駆動源の両方またはいずれか一方を前記リンク作動装置の前記入力部材または前記ベース部材に設け、この駆動源の回転力を前記回転軸または前記動作変換機構へ伝達する可撓性ワイヤを設けたことを特徴とする遠隔操作型アクチュエータ。
【請求項2】
請求項1において、前記回転軸における前記駆動部ハウジング側の端部の軸心を、前記出力部材の球面中心を通る中心軸と平行とした遠隔操作型アクチュエータ。
【請求項3】
請求項2において、前記動作変換機構は、前記可撓性ワイヤの回転運動を直線往復運動に変換するねじ機構式の直動機構であって、この直動機構である動作変換機構の最終出力部で前記姿勢操作部材に進退動作させる遠隔操作型アクチュエータ。
【請求項4】
請求項2において、前記動作変換機構は、前記可撓性ワイヤの回転により回転するウォームと、このウォームと噛み合うウォームホイールとを組み合わせた構成であり、前記ウォームホイールの一部分である接触部が前記姿勢操作部材と滑り接触して姿勢操作部材を進退動作させる遠隔操作型アクチュエータ。
【請求項5】
請求項1ないし請求項4のいずれか1項において、前記入力部材および出力部材にそれぞれ貫通孔を設け、各貫通孔に前記可撓性ワイヤを通して設けた遠隔操作型アクチュエータ。
【請求項6】
請求項1ないし請求項5のいずれか1項において、前記可撓性ワイヤは、前記中央リンク部材に固定され各リンク機構の内側に位置するワイヤ案内部材により案内される遠隔操作型アクチュエータ。
【請求項7】
請求項1ないし請求項6のいずれか1項において、前記可撓性ワイヤは、可撓性を有するアウタチューブの内部に、両端がそれぞれ回転の入力端および出力端となる可撓性のインナワイヤを複数の転がり軸受によって回転自在に支持し、隣合う転がり軸受間に、これら転がり軸受に対して予圧を与えるばね要素を設けた構造とした遠隔操作型アクチュエータ。
【請求項8】
請求項1ないし請求項7のいずれか1項において、前記可撓性ワイヤの出力側に、この可撓性ワイヤの回転を減速する減速機構を設けた遠隔操作型アクチュエータ。
【請求項9】
請求項8において、前記減速機構と前記姿勢操作部材間の動力伝達部材に、この動力伝達部材の動作位置を検出する位置検出手段を設けた遠隔操作型アクチュエータ。
【請求項10】
請求項9において、前記入力部材および出力部材にそれぞれ貫通孔を設け、各貫通孔に、前記位置検出手段とこの位置検出手段の検出信号を受信する制御部とをつなぐ配線を通して設けた遠隔操作型アクチュエータ。
【請求項11】
請求項1ないし請求項10のいずれか1項において、前記スピンドルガイド部は湾曲した箇所を有する遠隔操作型アクチュエータ。
【請求項12】
請求項1ないし請求項11のいずれか1項において、医療用手術用である遠隔操作型アクチュエータ。
【請求項1】
先端に工具を有するアクチュエータ本体を、ベース部材に対して、リンク作動装置により位置および姿勢を変更可能とした遠隔操作型アクチュエータであって、
前記アクチュエータ本体は、細長形状のスピンドルガイド部と、このスピンドルガイド部の先端に先端部材連結部を介して姿勢変更自在に取付けられた先端部材と、この先端部材に回転自在に設けた前記工具と、前記スピンドルガイド部の基端が結合された本体基端ハウジングとを備え、前記先端部材は、前記工具を保持するスピンドルを回転自在に支持し、前記スピンドルガイド部は、工具回転用駆動源の回転を前記スピンドルに伝達する回転軸と、両端に貫通したガイド孔とを内部に有し、先端が前記先端部材に接して進退動作することにより前記先端部材を姿勢変更させる姿勢操作部材を前記ガイド孔内に進退自在に挿通し、姿勢変更用駆動源の回転を進退動作に変換して前記姿勢操作部材を進退させる動作変換機構を前記本体基端ハウジング内に設けたものとし、
前記リンク作動装置は、前記ベース部材に直接または間接的に結合された入力部材に対し、前記本体基端ハウジングに直接または間接的に結合された出力部材を、3組以上のリンク機構を介して位置および姿勢を変更可能に連結し、前記各リンク機構は、それぞれ前記入力部材および出力部材に一端が回転可能に連結された入力側および出力側の端部リンク部材と、これら入力側および出力側の端部リンク部材の他端をそれぞれ回転可能に連結した中央リンク部材とでなり、前記各リンク機構は、前記各リンク部材を直線で表現した幾何学モデルが、前記中央リンク部材の中央部に対する入力側部分と出力側部分とが対称を成す形状であり、前記3組以上のリンク機構における2組以上のリンク機構に、これら2組以上の各リンク機構を動作させて前記出力部材の姿勢を制御するリンク機構用駆動源を設けたものとし、
前記工具回転用駆動源および姿勢変更用駆動源の両方またはいずれか一方を前記リンク作動装置の前記入力部材または前記ベース部材に設け、この駆動源の回転力を前記回転軸または前記動作変換機構へ伝達する可撓性ワイヤを設けたことを特徴とする遠隔操作型アクチュエータ。
【請求項2】
請求項1において、前記回転軸における前記駆動部ハウジング側の端部の軸心を、前記出力部材の球面中心を通る中心軸と平行とした遠隔操作型アクチュエータ。
【請求項3】
請求項2において、前記動作変換機構は、前記可撓性ワイヤの回転運動を直線往復運動に変換するねじ機構式の直動機構であって、この直動機構である動作変換機構の最終出力部で前記姿勢操作部材に進退動作させる遠隔操作型アクチュエータ。
【請求項4】
請求項2において、前記動作変換機構は、前記可撓性ワイヤの回転により回転するウォームと、このウォームと噛み合うウォームホイールとを組み合わせた構成であり、前記ウォームホイールの一部分である接触部が前記姿勢操作部材と滑り接触して姿勢操作部材を進退動作させる遠隔操作型アクチュエータ。
【請求項5】
請求項1ないし請求項4のいずれか1項において、前記入力部材および出力部材にそれぞれ貫通孔を設け、各貫通孔に前記可撓性ワイヤを通して設けた遠隔操作型アクチュエータ。
【請求項6】
請求項1ないし請求項5のいずれか1項において、前記可撓性ワイヤは、前記中央リンク部材に固定され各リンク機構の内側に位置するワイヤ案内部材により案内される遠隔操作型アクチュエータ。
【請求項7】
請求項1ないし請求項6のいずれか1項において、前記可撓性ワイヤは、可撓性を有するアウタチューブの内部に、両端がそれぞれ回転の入力端および出力端となる可撓性のインナワイヤを複数の転がり軸受によって回転自在に支持し、隣合う転がり軸受間に、これら転がり軸受に対して予圧を与えるばね要素を設けた構造とした遠隔操作型アクチュエータ。
【請求項8】
請求項1ないし請求項7のいずれか1項において、前記可撓性ワイヤの出力側に、この可撓性ワイヤの回転を減速する減速機構を設けた遠隔操作型アクチュエータ。
【請求項9】
請求項8において、前記減速機構と前記姿勢操作部材間の動力伝達部材に、この動力伝達部材の動作位置を検出する位置検出手段を設けた遠隔操作型アクチュエータ。
【請求項10】
請求項9において、前記入力部材および出力部材にそれぞれ貫通孔を設け、各貫通孔に、前記位置検出手段とこの位置検出手段の検出信号を受信する制御部とをつなぐ配線を通して設けた遠隔操作型アクチュエータ。
【請求項11】
請求項1ないし請求項10のいずれか1項において、前記スピンドルガイド部は湾曲した箇所を有する遠隔操作型アクチュエータ。
【請求項12】
請求項1ないし請求項11のいずれか1項において、医療用手術用である遠隔操作型アクチュエータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2011−245075(P2011−245075A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2010−122395(P2010−122395)
【出願日】平成22年5月28日(2010.5.28)
【出願人】(000102692)NTN株式会社 (9,006)
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願日】平成22年5月28日(2010.5.28)
【出願人】(000102692)NTN株式会社 (9,006)
【Fターム(参考)】
[ Back to top ]