
遠隔測定整形外科インプラント
本発明は、一般に整形外科インプラントに関し、より具体的には、データ取得能力を有する整形外科インプラント、および骨折治癒の監視および診断でのそれらの使用に関する。RSAもまた、骨折が整復したかどうかを確認するために、長骨骨折部内での骨片間の運動を測定するため、および治癒中の仮骨の剛性の変化を検知するための方法として開示されている。

【発明の詳細な説明】
【技術分野】
【0001】
関連出願の相互参照
本出願は、2009年7月6日に提出された英国特許仮出願第0911697.1号の利益を主張する。その開示が、参照によりその全体において本明細書に組み込まれている。
【0002】
本発明は、一般に整形外科インプラントに関し、より具体的には、データ取得能力を有する整形外科インプラント、および骨折治癒の監視および診断におけるそれらの使用に関する。
【背景技術】
【0003】
長骨の骨折は、米国での致命的でない負傷の10%を占める、蔓延している問題である(Kanakaris、2007)。これらの中で、最も一般的であるのは脛骨幹部の骨折であり、米国では、1年間に77,000件近い入院の結果に至っている(Schmidtら、2003)。脛骨幹部骨折の疫学および病因学は、危険行為との関連性を示している。このタイプの骨折は、若い男性に最も蔓延しているようにみえる(Grutter、2000)。Court-Brown、1995による研究によって、脛骨幹部骨折を有する患者の平均年齢は37歳であり、最も高い発生率は、10代男性で生じることがわかった。最も一般的である2つの原因は、スポーツに関連する負傷および自動車事故である。
【0004】
脛骨の骨折に対するいくつかの分類が記載されているが、おそらく最も広く受け入れられている長骨骨折分類は、AO/OTA分類である(Arbeitsgemeinschaft fur Osteosythesefragen/Orthopaedic Trauma Association)。この分類体系は骨折のパターンのみであり、局所的な軟部組織の損傷を考慮していないようにみえる(図1)。関連する軟部組織の負傷は、脛骨の閉鎖脛骨骨折に対してはTscherneとGotzenの分類(Schmidtら、2003)に従って、および開放骨折に対してはGustilo Anderson分類(Gustilo & Anderson、1976)に従って分類されうる。
【0005】
歪の遠隔測定のために使用される計装化された釘の生体外の生体力学的研究に対して、これらの分類のうち最も有用であるのは、AO分類である。これは、すべての長骨骨折に対する英数字分類体系である。このようにして分類される骨折の一例は、42-C2である。「4」は、脛骨を表し、一方「2」は、これが、骨幹の骨折であることを示す。位置を説明したが、文字A、BまたはCは骨折のタイプ、および増加する複雑度を示すように割り当てられている。これらの副分類は、複雑度が増加するにつれて、数字1、2または3を追加することによって割り当てられる(Grutter、2000)。これらの群のさらなる副分類が、骨片の数を示すために行われてもよい。
【0006】
さまざまな骨折の中で、42-A3が、最も一般的であるようにみえ、これは、脛骨の骨幹の骨折の23.9%を占めている。(Court-Brown、1995)。
【0007】
これらの骨折の処置は、伝統的処置と外科的処置の2つのカテゴリに大きく分けられる。伝統的な治療には、ギプスまたは機能装具の使用が含まれる。外科的処置は、髄内(IM)釘固定法のいずれかの観血的整復固定術(ORIF)を含みうる。伝統的処置とORIFを比較するMETA解析によると、表層的な創傷感染のリスクがかなり減少するにも関わらず、ギプスは、20週間での低い癒合率(p=0.008)の結果となることが見出された(Littenburgら、1998)。また、ギプスは、骨折および変形の深刻度によって制限され、初期の中度または重度の変位によって癒合遅延または非癒合の率が9%から27%までも増加する。(Schmidtら、2003)。
【0008】
髄内釘固定法は、脛骨の骨折の大半に対する処置の好ましい方法であるようにみえる。(Schmidtら、2003)。この提案は、ランダム化比較試験(RCT)によって支援されている。これは、髄内釘固定法が、伝統的な処置と比較して、より速い癒合、および変形癒合率の減少を結果として生じさせることを示している(Hooper GJ、1991)。
【0009】
癒合遅延または非癒合は、脛骨の骨折での主要な関心事である。「最善のシナリオ」の計算では、1本の脛骨の非癒合のコストが、16,330ポンドであると算定されている。20%が処置の直接のコストであり、80%が間接的なコストである(Kanakaris、2007)。報告されている癒合遅延の発生は、使用される定義が任意であるため、極度の変動を示している。一般に、脛骨の癒合遅延は、20週間で認識されるが、より早期に検知することが可能である。癒合遅延は、癒合を達成するために、処置を変更することを考慮する点として考えることが可能である(Phieffer & Goulet、2006)。非癒合の定義は、成人の少なくとも9か月の骨折で、連続して3か月、治癒の放射線写真的証拠がないことであるとして、広く受け入れられている。癒合遅延および非癒合の罹患率は、それぞれ4.4%および2.5%であると報告されている。しかし、開放骨折では、癒合遅延は41%にものぼり、癒合が達成されるまでにさらなる処置を必要とする(Phieffer & Goulet、2006)。
【0010】
癒合遅延に対する処置は、原因に照らしてさまざまである。これは、大まかに言えば、固定、再釘固定(re-nailing)、骨移植、および電気的刺激、超音波または骨形成タンパク質(BMP)などの生理学的補助などの補助的な治療を含みうる。しかし、癒合遅延を早期に診断および処置することが、患者をかなりの期間の障害と痛みから救うため、タイミングが成功のための鍵である(Phieffer & Goulet、2006)が、一方、病的状態の低減による健康経済への影響も有する。
【0011】
骨折の治癒の終了点を確認するために、さまざまな方法が使用されている。これは怪我をした手足への適切な荷重負荷を患者に助言するための、または癒合遅延または非癒合のリスクを診断するための、臨床医にとって基本的な知識である。
【0012】
現在、感度の高いデータ、良好な再現性ならびに容易な使用を提供する最も基準となる方法が不足している。連続放射線写真および手での触診は、しばしば組み合わせて使用されるが、主観的であり、医師による違いを示す。デキサスキャン、振動スペクトル解析、シンチグラフィおよび超音波を使用することの不正確性および複雑性もまた、潜在的な測定ツールとして算定されている。
【0013】
遠隔測定
髄内釘は、固定を与えるように作用する一方、骨折部位に回転、曲げおよび圧縮力を伝達し、骨の解剖学的な位置を維持する。髄内釘はまた、骨が治癒するときに、荷重を骨へ徐々に移行させる荷重分散デバイスとしても作用する。
【0014】
遠隔測定は、適切に計装化された髄内釘によってもたらされる歪および荷重を直接測定し、したがって骨折治癒を妨げることなく、骨折治癒の進展の標示を与えることを可能にする。遠隔測定整形外科システムの一例が、その全体において本明細書に組み込まれるWO2007/025191に開示されている。その臨床的な使用に加えて、このような方法論は、骨折治癒およびその生体力学についての我々の理解を増加させるために大いに有益であることがわかる。これは、術後の患者ケアの最適化を可能にし、所望の機械的な環境を与えるために最も適切であると認識される骨格荷重に対するさまざまな活動の役割を評価する(Schneider E、2001)。
【0015】
釘に付加される荷重を直接測定することを可能にする歪ゲージは、従来は釘の外壁内の複数のくぼみの中に配置されており、したがって、釘の生体力学的特性の変化を生じさせる可能性を有する。このことはまた、局所的な弱体化または応力集中に至る可能性がある。
【0016】
我々は、釘上の複数の位置への歪ゲージを配置することに関連する冗長性を確認し、第1に、複数の歪ゲージを備えるくぼみに対する最適な位置、および第2に釘の長手方向軸に対する歪ゲージの最適な方向を確認した。歪ゲージは、オフセット軸方向圧縮、ねじり力または3/4点曲げ力のいずれかを受けたとき、釘内の歪を監視することが可能である。
【0017】
歪ゲージの最適な位置および方向の確認は、さまざまな骨折パターンで使用されうる、髄内釘の単一の商業用デザインの生成を容易にするであろう。
【0018】
放射線体積測定解析(RSA)
人工器官または身体の部分の3次元(3D)変位の生体内測定が、1974年にGoran Selvikによって開拓された(Bragdonら、2002)。RSAはまた、放射線体積測定またはレントゲン立体写真解析と呼ばれる。
【0019】
RSA測定は、経時的な繰り返し撮影された1対の同時の放射線写真を使用して得られうる。タンタルビードマーカーが、精査を受ける各剛体を定義するために必要とされる少なくとも3つの同一直線上にないビードによる研究の下で、身体部分またはインプラントセグメント内に埋め込まれる(Valstarら、2005)。よく定義された、移動しない位置でタンタルビードとともに埋め込まれた補正ケージを用いて、3次元座標系が獲得される。隣合わせに置かれた2枚の放射線写真が、一平面上の配置で、または二平面配置の場合互いに対して90度で(Valstarら、2005)、マーカーの3次元座標を確立するために使用され、剛体間の変位が、市販されているRSAソフトウェアシステムを使用して計算されることが可能である(Madanatら、2006)。
【先行技術文献】
【特許文献】
【0020】
【特許文献1】英国特許仮出願第0911697.1号
【特許文献2】国際公開第WO2007/025191号
【非特許文献】
【0021】
【非特許文献1】Bragdon, C. R., Malchau, H., Yuan, X., Perinchief, R., Karrholm, J., Borlin, N., Estok, D. M., & Harris, W. H. 2002, "Experimental assessment of precision and accuracy of radiostereometric analysis for the determination of polyethylene wear in a total hip replacement model", J.Orthop.Res., vol. 20, no. 4, pp. 688-695.
【非特許文献2】Court-Brown 1995, "The epidemiology of tibial fractures", Journal of Bone and Joint Surgery. British Volume, vol. 77, no. 3, p. 417.
【非特許文献3】Grutter 2000, "The epidemiology of diaphyseal fractures of the tibia", Injury, vol. 31 , p. 64.
【非特許文献4】Gustilo, R. B. & Anderson, J. T. 1976, "Prevention of infection in the treatment of one thousand and twenty-five open fractures of long bones: retrospective and prospective analyses", Journal of Bone and Joint Surgery, vol. 58, no. 4, pp. 453-458.
【非特許文献5】Hooper GJ 1991 , "Conservative management or closed nailing for tibial shaft fractures. A randomised prospective trial", Journal of Bone and Joint Surgery. British Volume, vol. 73, no. 1, p. 83.
【非特許文献6】Kanakaris, N. 2007, "The health economics of the treatment of long-bone non-unions", Injury, vol. 38, p. 77.
【非特許文献7】Lacroix, D and Prendergast P.J 2001, !A mechano-regulation model for tissue differentiation during fracture healing: analysis of gap size and loading". Journal of Biomechanics Vol.35, Issue 9, Pages 1163-1171 (September 2002)
【非特許文献8】Littenberg, B. E. N. J., Weinstein, L. P., McCarren, M. A. D. E., Mead, T. H. O. M., Swiontkowski M. F., Rudicel, S. A., & Heck, D. A. V. 1. 1998, "Closed Fractures of the Tibial Shaft. A META-analysis of Three Methods of Treatment", Journal of Bone and Joint Surgery, vol. 80, no. 2, pp. 174-183.
【非特許文献9】Madanat, R., Moritz, N., Larsson, S., & Aro, H. T. 2006, "RSA applications in monitoring of fracture healing in clinical trials", Scand.J.Surg., vol. 95, no. 2, pp. 119-127.
【非特許文献10】Phieffer, L. S. & Goulet, J. A. 2006, "Delayed Unions of the Tibia", Journal of Bone and Joint Surgery, vol. 88, no. 1 , pp. 205-216.
【非特許文献11】Schmidt et al 2003, "Treatment of Closed Tibial Fractures", Journal of Bone and Joint Surgery, vol. 85, no. 2, pp. 352-368.
【非特許文献12】Schneider, E., Michel, M. C, Genge, M., Zuber, K., Ganz, R., & Perren, S. M. 2001 , "Loads acting in an intramedullary nail during fracture healing in the human femur", J.Biomech., vol. 34, no. 7, pp. 849-857.
【非特許文献13】Valstar, E. R., Gill, R., Ryd, L., Flivik, G., Borlin, N., & Karrholm, J. 2005, "Guidelines for standardization of radiostereometry (RSA) of implants", Acta Orthop., vol. 76, no. 4, pp. 563-572.
【発明の概要】
【発明が解決しようとする課題】
【0022】
RSAは、関節置換術の固定および定着を評価し、骨の微細運動を決定するための「最も基準となる」技術であるが、この技術は、整形外科固定デバイスとともに固定された長骨骨折部内の骨片間の運動を測定するためには、考慮されなかった。
【0023】
我々は、骨折の整復の前後で、脛骨などの長骨内に髄内釘によって固定された骨片間の運動を測定するために、RSAが正確におよび精確に使用されうることを確認した。
【課題を解決するための手段】
【0024】
本発明の第1の態様によると、
(a)長手方向軸を有する整形外科インプラントであって、
(i)インプラントの長手方向軸に対して約+45°および/または約-45°で方向づけられた歪ゲージと、
(ii)前記歪ゲージ(複数可)を受けるように構成されたくぼみと、
(iii)少なくとも1つの電源、第1の送信機、第1の受信機、および第1のマイクロプロセッサと電気的に接続された電子構成部品と、
(iv)前記電子構成部品を受けるように構成されたくぼみと、
(v)前記くぼみを密封するための注入材料と、
(vi)前記電子構成部品と電気的に接続された電源と
を備える整形外科インプラント、ならびに
(b)
(i)第2のマイクロプロセッサと、
(ii)前記第2マイクロプロセッサと電気的に接続され、前記電子構成部品の前記第1の受信機へ信号を送信するように構成された第2の送信機と、
(iii)前記第2のマイクロプロセッサと電気的に接続され、前記電子構成部品の前記送信機からデータを受信するように構成された第2の受信機と
を備える制御ユニット
を備える遠隔測定整形外科インプラントシステムが、提供される。
【0025】
整形外科インプラントの長手方向軸に対して約+45°でまたは約-45°で方向づけられたゲージが、トルクおよび3点または4点曲げのいずれかに関連する歪を測定するために最適に配置されているとして確認された。骨折部位に対するゲージの相対的な位置は、トルクの付加の際の歪の測定時には重要でないことがわかった。
【0026】
本発明の実施形態では、整形外科インプラントの長手方向軸に対して約0°または約90°のいずれかで方向づけられたさらなる歪ゲージが、提供される。このような方向づけは、オフセット軸方向荷重に関連する歪を測定するために最適であるとして確認された。しかし、骨折部位に対するゲージの相対的な位置は、重要であることが見出され、骨折部位がゲージに対して遠位にあるとき、歪測定の感度のかなりの減少がある。
【0027】
したがって、骨折のタイプおよび位置に関わらず歪を測定することが可能であるゲージを提供すること、および、医療関係者に、機械的な荷重の方式に関するオプションが使用されることを提供することが、釘の商業用実施形態では望ましい。たとえば、オフセット軸方向圧縮荷重をかけることは、患者が歩行可能であることを必要とする。
【0028】
したがって、商業用の髄内釘が、整形外科インプラントの長手方向軸に対して約+45°および/または約-45°で方向づけられたゲージを備えて提供されうるが、これは、トルクに対する荷重の方式を制限することになり、ある患者では、満足されない、または可能ではないかもしれない。1つのくぼみ内に異なるように方向づけられたゲージを設けることによって、髄内釘が、トルク荷重の代替となるもの、すなわち、オフセット軸方向圧縮または3または4点曲げを与える可能性が、髄内釘の機械的な一体性に損害をもたらさない魅力的な商品としてみられている。
【0029】
釘の商業用の実施形態は、約+45°で方向づけられた歪ゲージおよび約0°で方向づけられた歪ゲージ、または約+45°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージ、または約-45°で方向づけられた歪ゲージおよび約0°で方向づけられた歪ゲージ、または約-45°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージを備えるくぼみを有する。
【0030】
本発明の実施形態では、くぼみは、+45°で方向づけられた歪ゲージ、約-45°で方向づけられた歪ゲージおよび約0°で配置された歪ゲージ、または約+45°で方向づけられた歪ゲージ、約-45°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージ、または約+45°で方向づけられた歪ゲージ、約0°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージ、または約-45°で方向づけられた歪ゲージ、約0°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージを備える。
【0031】
本発明の実施形態では、くぼみは、約+45°で方向づけられた歪ゲージ、約-45°で方向づけられた歪ゲージ、約0°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージを備える。
【0032】
適切な機械的歪ゲージの例には、箔、薄膜、または半導体歪ゲージが含まれる。別法として、センサは、機械的な荷重を直接測定するために使用されるロードセルであってよい。
【0033】
本発明の実施形態では、蓋が、その中の回路に対する電気的遮蔽を与えるために、くぼみにオプションで付随されている。
【0034】
本発明の第2の態様によると、
遠隔測定整形外科インプラントであって、
(i)インプラントの長手方向軸に対して約+45°および/または-45°で方向づけられた歪ゲージと、
(ii)前記歪ゲージ(複数可)を受けるように構成されたくぼみと、
(iii)少なくとも1つの電源、第1の送信機、第1の受信機、および第1のマイクロプロセッサと電気的に接続された電子構成部品と、
(iv)前記電子構成部品を受けるように構成されたくぼみと、
(v)前記くぼみを密封するための注入材料と、
(vi)前記電子構成部品と電気的に接続された電源と
を備える、遠隔測定整形外科インプラントが提供される。
【0035】
本発明の第2の態様の実施形態では、少なくとも1つのさらなる歪ゲージが、インプラントの長手方向軸に対して約0°でおよび/または約90°で方向づけられている。
【0036】
本発明の実施形態では、蓋が、その中の回路のための電気的遮蔽を与えるために、くぼみにオプションで付随されている。
【0037】
本発明の第1および第2の態様による実施形態では、整形外科インプラントは、髄内釘である。
【0038】
遠隔測定髄内釘が、その全体において参照により本明細書に組み込まれるWO2007/025191で、前に開示されている。釘の実装のための適切な材料および方法論、および通信で使用するため、および釘から受けた情報を格納するために適切な周辺部品の例が、WO2007/025191に開示されている。
【0039】
本発明の実施形態では、遠隔測定整形外科インプラント、より具体的には、髄内釘が、歪ゲージを受けるための単一のくぼみを備える。
【0040】
本発明の特定の実施形態では、この単一のくぼみが、釘の近位の部分に配置されている。
【0041】
本発明の特定の実施形態では、この単一のくぼみが、釘の長手方向軸に対して、約+45°および約0°または約-45°および約0°で方向づけられた歪ゲージを備える、または歪ゲージから成る。
【0042】
本発明の代替となる実施形態では、歪ゲージがその中に設けられているくぼみが、髄内釘の長手方向軸の長さに沿ったほぼ中央に配置されている。
【0043】
本発明の代替となる実施形態では、歪ゲージくぼみが、長手方向軸の長さの沿ったほぼ中央に配置され、釘のテーパされた近位の領域内へ延びている。髄内釘のいくつかのデザインでは近位の領域の壁厚はわずかに厚く、歪ゲージおよびそれに付随する電子構成部品を保持するくぼみを設けることは、くぼみが釘の他の領域内に配置された場合よりも、釘の機械的一体性に対する影響は低い。
【0044】
本発明の実施形態では、くぼみは、ポケットが釘の長手方向軸に沿って延び、その幅よりも大きい長さを有するような寸法にされている。
【0045】
本発明の実施形態では、くぼみは、約10から150mmの間、または約10から130mmの間、または約100mmから150mmの間、または約100mmから140mmの間、または約100mmから130mmの間、または約120mmから140mmの間の長さを有する。
【0046】
本発明の実施形態では、くぼみは、約130mmの長さを有する。
【0047】
くぼみは、その長さに沿った中間点を有する。
【0048】
本発明の実施形態では、くぼみの長さに沿った中間点は、髄内釘の長手方向に沿ったほぼ中間に位置される。
【0049】
本発明の実施形態では、くぼみの長さに沿った中間点は、釘の長手方向軸の中間点から、ポケットの長さまで偏移している。たとえば、くぼみの長さは、第1の端部および第2の端部を有するとして画定され、これらの端部のうちのいずれかが、釘の長手方向軸に沿った中間点に位置されうる。
【0050】
髄内釘の一例は、TRIGEN META NAIL(登録商標)(Smith & Nephew)である。TRIGEN META NAIL(登録商標)の設計制約のため、くぼみは、釘の近位の領域に位置されている。
【0051】
本発明の実施形態では、髄内釘は、Table 1(表1、表2)に開示されている8または9ポケット釘のデザインを備える、または構成される。
【0052】
本発明の実施形態では、髄内釘は、長骨、たとえば、脛骨または大腿骨の骨折の修復に使用される。
【0053】
代替となる実施形態は、歪ゲージおよびその他の電子構成部品を、プレート、骨ねじ、カニューレねじ、ピン、ロッド、ステープル、およびケーブルなどの他の埋込み可能な外傷製品内に組み込むことである。また、本明細書で説明されている計測は、全膝置換(TKR)および股関節全置換(THR)、歯科用インプラント、および頭蓋顎顔面インプラントなどの関節置換術インプラントへ拡張可能である。
【0054】
本発明の第3の態様によると、本発明の第1の態様によるシステム内での、本発明の第2の態様による遠隔測定整形外科インプラントの使用が提供される。
【0055】
固定および外科手術は骨の治癒を容易にするが、骨折の治癒は、センサおよび生体遠隔測定システムを使用してインプラントと周囲の骨の間の荷重分配の現場での変化を連続的に監視することを通じて達成されうる、十分な生理学的な治癒をまだ必要とする。骨の質量およびアーキテクチャは、それらへ付加される機械的な荷重によって影響されることが知られている。内部の整形外科固定システムの不十分な管理によって生じる応力遮蔽による適切な荷重の欠如で、骨の質量が減少し、骨折の治癒の妥協が結果として生じる。遠隔測定整形外科インプラントの主な機能は、外科的配置の直後の荷重を担持することである。たとえば、遠隔測定整形外科釘は、髄内管内で外科的配置の直後の荷重を担持する。骨折治癒の進行とともに、インプラントと骨の間の荷重分配が変化する。このことは、骨折の位置に関わらず整形外科インプラント内に最適に位置されている、歪ゲージを使用することによって追尾されうる。このことは、釘の単一のデザインを、ある範囲の骨折タイプおよび骨折位置に対して使用することが可能であるという利点を有する。歪ゲージは、X線から得ることができないすべての空間的な成分で治癒骨の荷重成分を、連続的または断続的のいずれかで監視することによって、骨折の場合に癒合の進展を監視するために使用されうる。癒合が生じるまでの周期的なフォローアップが、骨片の相対的な運動が徐々に減少することを示すグラフを与える。
【0056】
各骨折患者は、彼または彼女の治癒曲線を生成する。しかし、治癒曲線の一般的な形状は、骨折が癒合状態、癒合遅延状態または非癒合状態のいずれか進展するかどうかを示している。患者から生成される治癒曲線は、骨折のタイプおよび位置、健康ステータス(基礎疾患)、年齢、活動量、リハビリテーションおよび体重負荷に至った時点を含むいくつかの要素に依存する。
【0057】
本発明の第4の態様によると、
整形外科インプラントに付加される機械的な荷重を測定する方法であって、
(i)所望の機械的荷重を付加するために適した位置に、本発明の第2の態様による遠隔測定整形外科インプラントを有する対象を配置する段階と、
(ii)インプラントに機械的な荷重を付加する段階と、
(iii)インプラント内に設けられた少なくとも1つの歪ゲージに問合せする段階と
を含む方法が提供される。
【0058】
歪ゲージによって測定された荷重が次に、(i)癒合状態へ進展する骨折(ii)遅延した非癒合である骨折および(iii)非癒合状態を維持する骨折についての、計装化した釘と周囲の骨の間の荷重分布を示す、仮想の荷重対治癒時間曲線と比較されうる。骨折治癒は、インプラント荷重の減少を結果として生じさせるが、釘の残留荷重は顕著であり、患者活動で増加することが予想される。インプラント除去の後、骨の荷重が50%まで増加することが示唆された。隣接する骨内で測定される荷重は、手足を通じて及ぼされた荷重からインプラント荷重を減算することによって決定することも可能であり、これは、力プレートまたはバランスのいずれかを使用して決定される。臨床医はまた、手足全体の機能に対する基準測定値を提供するために、対側の手足を通って作用する荷重を測定しうる。
【0059】
外科医が、インプラント上の歪がある時間にわたって減少したことを観察した場合、このことは、周囲の硬組織(たとえば、仮骨)が荷重のうちのいくらかを受けている、したがって骨折が治癒していることを意味している。しかし、インプラント上の歪が、時間とともに変化せず、患者が、病院またはその他の医療施設から退院したときとほぼ同じレベルである場合、このことは、周囲の硬組織が、荷重に耐えておらず、したがって骨折が治癒していないことを意味している。
【0060】
本発明の第4の態様による方法の実施形態では、
ねじり力の付加の際に埋め込まれた遠隔測定整形外科インプラントへの機械的な荷重を測定する方法であって、
(i)立脚位または仰臥位のいずれかに、遠隔測定整形外科インプラントを有する対象を配置する段階と、
(ii)遠隔測定整形外科インプラント上にねじり力を付加する段階と、
(iii)約+45°および/または約-45°方向で歪ゲージを問合せする段階と
を含む方法が提供される。
【0061】
本発明の第4の態様による方法の実施形態では、
オフセット軸方向圧縮力を付加する際の整形外科インプラントへの機械的な荷重を測定する方法であって、
(i)立脚位で遠隔測定整形外科インプラントを有する対象を配置する段階と、
(ii)遠隔測定整形外科インプラントにオフセット軸方向圧縮力を付加する段階と、
(iii)約0°および/または約90°の方向で歪ゲージを問合せする段階と
を含む方法が提供される。
【0062】
本発明の第4の態様による方法の実施形態では、
3または4点曲げ力の付加の際の整形外科インプラントへの機械的な荷重を測定する方法であって、
(i)立脚位または仰臥位で遠隔測定整形外科インプラントを有する対象を配置する段階と、
(ii)遠隔測定整形外科インプラント上に3または4点曲げ力を付加する段階と、
(iii)約+45°、約-45°、約0°および/または約90°方向の歪ゲージに問合せする段階と
を含む方法が提供される。
【0063】
本発明の第5の態様によると、
対象内の骨折治癒を監視する方法であって、
(i)所望の機械的な荷重を付加するために適した位置に、本発明の第2の態様による遠隔測定整形外科インプラントを有する対象を配置する段階と、
(ii)機械的な荷重を付加する段階と、
(iii)インプラント内に配置された少なくとも1つの歪ゲージに問合せする段階と、
(iv)歪を基準骨折治癒曲線と相関させる段階と
を含む方法が提供される。
【0064】
本発明の第5の態様による実施形態では、機械的な荷重が、オフセット軸方向圧縮、トルク、3点曲げまたは4点曲げから成る群から選択され、対象が、立脚位または仰臥位状態にオプションで配置される。
【0065】
髄内釘が、骨折仮骨の剛性の変化を検知し、患者の治癒ステータスを決定するために使用されうる。髄内釘は、仮骨の剛性の少なくとも4.1Nm/°の変化を検知することが可能である。したがって、釘が、仮骨の剛性測定に基づいて脛骨の骨折固定の1か月内の骨折の癒合遅延または非癒合を検知することが可能であることが考えられる。
【0066】
本発明の第6の態様によると、整形外科固定デバイスとともに固定されている骨折部内での骨片間運動の測定のために放射線体積測定解析を使用することが、提供される。
【0067】
本発明の実施形態では、RSAが、無傷、整復された骨折部、整復されていない骨折部を区別するために使用されうる。
【0068】
本発明の第7の態様によると、無傷、整復された骨折部、整復されていない骨折部を区別するためのRSAの使用が提供される。
【0069】
本発明の第8の態様によると、
骨折部内の骨片間運動を計測する方法であって、骨折部が骨折固定デバイスによって固定され、前記方法が、
i)複数の放射線不透過マーカーを骨折した骨および/または骨折固定デバイスに付随させる段階、
ii)複数の放射線不透過マーカーを備える補正ケージを骨折部位に関連する既知の位置に配置する段階と、
iii)骨折部位および補正ケージが、少なくとも2つの角度から同時にX線照射される、骨折部位の放射線写真検査を行う段階と、
iv)補正ケージ内の放射線不透過マーカーの位置に基づいて3次元座標系を生成する段階と、
v)骨折した骨および/または骨折固定デバイスに関連する放射線不透過マーカーの3次元位置を3次元座標系と比較する段階と
を含む方法が提供される。
【0070】
本発明の実施形態では、骨折が、たとえば、脛骨または大腿骨などの長骨のものである。
【0071】
整形外科デバイスは、たとえば、髄内釘、骨プレートまたはイリザロフフレームなどの外部固定具であってよい。
【0072】
本発明の特定の実施形態では、RSAが髄内釘によって固定された脛骨幹部骨折部内の骨片間運動を正確かつ精確に監視するために使用される。
【0073】
適切な放射線不透過マーカーの例は、タンタルビードであるが、RSAで使用するために適した代替となる放射線不透過マーカーが考えられる。
【0074】
別法として、電子構成部品に付随するはんだ接合部が、骨片間の骨の運動を監視するための基準点として使用されうる。
【0075】
放射線不透過マーカーが、好ましくは、近位のおよび遠位の骨折セグメントに付随し、それによって剛体セグメントを規定する。
【0076】
少なくとも3つの放射線不透過マーカーが、近位のおよび遠位の骨折セグメントに付随している。
【0077】
放射線不透過マーカーが、好ましくは、分散したパターンで、骨および/またはインプラントに付随している。
【0078】
整形外科デバイスが、たとえば、髄内釘、骨プレートまたはイリザロフフレームなどの外部固定具から選択されてよい。
【0079】
RSAは、(ねじの緩みまたは増強を通じて)インプラントの位置的な変化およびインプラントに作用する力の変動(誘導変位)の結果として、骨の微細運動を測定することが可能であり、仮骨剛性を間接的に測定することも可能である。このようにして、RSAが、インプラント固定および骨折の整復の両方を調査するために術後に使用されうる。
【0080】
RSAが、外傷固定のための術中ツールとして使用されうることが、さらに考えられる。この技術の使用が、外科医が、インプラントの位置異常または配向異常を修正すること、および骨折が十分に整復されることを確実にすることを可能にする。
【0081】
本発明のさらなる実施形態では、本発明の1つまたは複数の態様による発明が、組み合わされることが可能であると考えられる。たとえば、骨折が、適切に計装化された髄内釘によって固定され、骨折治癒の遠隔測定および放射線体積測定評価の両方を可能にする。有利には、使用される計装化された髄内釘および髄内釘を備えるシステムは、本発明の第1のおよび第2の態様に従って定義されるようである。
【0082】
本発明の第9の態様によると、骨折治癒、たとえば、動物モデルを含む生体力学モデルの骨折治癒の生体外分析において、本発明の第1の態様によるシステム、または本発明の第2の態様による遠隔測定整形外科インプラントの使用が提供される。
【0083】
本発明の第10の態様によると、添付の実施例、表および図を参照して本明細書で実質上説明されるような方法、デバイスおよびシステムが提供される。
【0084】
本発明のさらなる特徴、態様および利点、ならびに本発明のさまざまな実施形態の構造および動作が、添付の図面を参照して以下で詳細に説明される。
【0085】
本明細書内に組み込まれ、その一部を形成する添付の図面は、本発明の実施形態を、本発明の原理を説明する働きをする説明とともに示している。
【図面の簡単な説明】
【0086】
【図1】骨折の病因学の図である。
【図2】反時計方向での、CCスパイラルポケット配置の図である。
【図3】TRIGEN META(登録商標)釘上のポケット位置の図である。
【図4】(i)オフセット軸方向圧縮(0〜1000N)、および(ii)トルク(±2.5N.m)の結果としての歪測定のための荷重リグの図である。
【図5】3点および4点曲げ(0〜1000N)の結果としての歪測定のための荷重リグの図である。
【図6】荷重リグ内でのX線チューブの位置決めの図である。
【図7】y軸回転測定のために使用される高精度回転台の図である。
【図8】RSA補正ケージの前に配置された3点荷重リグの図である。
【図9】補強されたポリエチレンを使用した仮骨シミュレーションの図である。
【図10】軸方向荷重に関する歪値の回帰図である。
【図11】トルクに関する歪値の回帰図である。
【図12】軸方向力およびトルクに関する主歪の大きさの図である。
【図13】軸方向力およびトルクに関する主歪方向の図である。
【図14】軸方向力およびトルクに関する主歪の大きさの図である。
【図15】軸方向力およびトルクに関する主歪方向の図である。
【図16】無傷の骨内の近位のセグメントに対する遠位のセグメントのY軸並進運動(微細運動)を示す図である。
【図17】無傷の骨内の近位のセグメントに対する遠位のセグメントのY軸回転を示す図である。
【図18】AO43-A3骨折部内の近位のセグメントに対する遠位のセグメントのY軸並進運動(微細運動)を示す図である。
【図19】AO43-A3骨折部内の近位のセグメントに対する遠位のセグメントのY軸回転を示す図である。
【図20】AO42-C2骨折部内の近位のセグメントに対する遠位のセグメントのY軸並進運動(微細運動)を示す図である。
【図21】AO42-C2骨折部内の近位のセグメントに対する遠位のセグメントのY軸回転を示す図である。
【図22】分節骨折の2つの脛骨の懸下点の間の18cmの中間に付加された前記荷重モーメントとの関係を示す、歪ゲージポケット数に対してプロットされた感度(マイクロストレイン/kg)の図である。
【図23】歪ポケットに対するトレース感度の図である。
【図24】ポケット6に重なるAO42-A3骨折を示す図である。
【図25】ポケット7〜8に重なるAO43-A1骨折を示す図である。
【図26】近位のおよび遠位の骨折線がポケット4および6にそれぞれ重なるポケット4、5および6に重なるAO42-C2骨折を示す図である。
【図27a】荷重増加によるZ回転の増加を示すRSAトレース図である。
【図27b】荷重増加によるZ回転の増加を示すRSAトレース図である。
【図27c】荷重増加によるZ回転の増加を示すRSAトレース図である。
【図27d】荷重増加によるZ回転の増加を示すRSAトレース図である。
【図28】釘-骨複合物の剛性を増分的に増加した、歪ポケットの感度のRSAトレース図である。
【図29】4および8ループ強化ポリエチレンテープ「仮骨」に対する荷重でのZ平面内の回転のRSAトレース図である。
【図30】人工の仮骨形成-円周上に付加の図である。
【図31】人工の仮骨形成-セグメント付加の図である。
【図32】骨折モデル:42-A2-A0;ポケット/ゲージ:4A;5B。立脚位-軸から外れた圧縮荷重の図である。
【図33】骨折モデル:42-A2-A0;ポケット/ゲージ:1B;9B。立脚位-軸から外れた圧縮荷重の図である。
【図34】骨折モデル:42-A2-A0;ポケット/ゲージ:1B;9B。立脚位-4点曲げの図である。
【図35】骨折モデル:42-A2-A0;ポケット/ゲージ:4B;5C。立脚位-4点曲げの図である。
【図36】骨折モデル:42-A2-A0;ポケット/ゲージ:1A;4A;5A;9A。立脚位:トルク荷重の図である。
【図37】骨折モデル:42-A2-A0;ポケット/ゲージ:1A;4A;5A;9A。仰臥位:トルク荷重の図である。
【図38】骨折モデル:42-A2-A0;ポケット/ゲージ:1B;4B;5B;9B。仰臥位:トルク荷重の図である。
【発明を実施するための形態】
【0087】
「スマートインプラント」は、制御された有用な方式で、その環境を感知し、どんな動作が必要とされるかを判定するための知識を付加し、何かを変更するために感知情報に作用することができるインプラントである。スマートインプラント技術の1つの魅力的な適用例は、整形外科インプラントに対する荷重を測定することである。たとえば、髄内釘は、3つのタイプの荷重、曲げ、ねじり、および圧縮を受ける。これらの荷重は、整形外科インプラント上に装着された、一連の歪ゲージのセンサ出力を測定することによって間接的に測定されうる。髄内釘の場合、釘の外部表面上に装着され、直径上に並べられた歪ゲージが、引張および圧縮力をそれぞれ受ける。通常、センサから測定される歪は、インプラントが、圧縮荷重よりも曲げ荷重を受けるとき、より高くなる。
【0088】
歪ゲージの基本的なパラメータは、WO2007/025191で定義されているようなゲージファクタGとして定量的に表現される、歪に対するその感度である。
【0089】
髄内釘などの埋込み可能な医療デバイスの中にセンサおよびその他の電子構成部品を組み込むことは、受動的な荷重支持デバイスから、患者活動およびコンプライアンスを記録および監視する能力を有するスマート「インテリジェント」システムへ、その主要な機能を変更する。
【0090】
材料および方法
Sawbone
第4世代の複合Sawboneが、Sawbones(登録商標) EuropeAB、Malmo、Swedenから得られた。これは、左の脛骨の代表物である。
【0091】
骨折パターンの病因学
図1に示すように、
(i)整復されていない中軸粉砕分節骨折(42-C2);
(ii)整復されていない遠位の関節外粉砕骨折(43-A3)
(iii)整復された単純らせん状骨折(42-A1)
(iv)整復された単純横骨折(42-A3)
【0092】
髄内釘
長さ38cm(外直径10mm)の脛骨のIM TRIGEN META NAIL(登録商標)(Smith & Nephew, Inc)。
【0093】
計装化された髄内釘
標準使用の長さ38cm、外直径10mmの脛骨IM TRIGEN META NAIL(登録商標)(Smith & Nephew, Inc)が、使用された。長さ15mm×幅6mmの寸法、34mmピッチで、釘の表面内にくぼみが刻まれた。ポケットが、釘の軸を下向きに走る、反時計方向のらせん状パターンを追従した。
【0094】
【表1】
【0095】
【表2】
【0096】
3個の前方ポケット(1、4、7)、2個の内側ポケット(3、6)および3個外側のポケット(2、5、8)がある。各ポケットは、3つのゲージからカニューレ管を通って4本のワイヤを通すために、その底部に穴を有する。ワイヤが、管の内部を、釘の遠位の端部へ下向きに走っている。ワイヤは、遠位のねじ穴の最も近位の部分を通って出て、2個の代替となるねじ穴を避けるために機械加工された斜めの通路に沿って、釘の端部の下方へ走っている。3個の箔歪ゲージ(N3K-XX-S022H-50C/DP)、Vishay Ltd、が、図2および3のように、MBond-600接着剤を使用して各ポケットの底部に接着されている。ゲージは、長手方向軸に対して方向づけられている。ゲージAは45°で、ゲージBは一直線上に、ゲージCは-45°で、それぞれ方向づけられている。0°ゲージは、たわみおよび延びを検知し、一方、+45°および-45°ゲージは、横曲げおよびねじりを検知する。ゲージは、MBond-43Bコーティングで一致して保護されている。ワイヤの500mmの自由長が、増幅器への取付けのために準備された。
【0097】
ゲージは、各ポケット内の単一のリターンワイヤによってクォータブリッジとして接続される。ワイヤは、リーマ加工された管を容易に通過することができる、8mm直径コネクタに取り付けられる。これらは、Labview v8(登録商標)へデータを送信する増幅器に取り付けられている。ロードセル内の8個のゲージからのデータもまた、同じシステムを通じて同時に記録される。Labview v8(登録商標)が、5秒のウィンドウで8個の歪ゲージのそれぞれに対して、512個の測定値を収集する。平均値が、データ解析のために使用される。歪値は、6.8の係数によって除算することによって、マイクロストレインに変換されうる。接地されたスズ箔によってすべてのワイヤをカバーすることによって、および荷重リグなどの構成要素を接地することによって、電気的ノイズが減少される。また、ラップトップへの主電源を除去することが、有用であることも発見された。
【0098】
遠隔測定方法論
1. 軸方向およびねじり荷重下での計装化された髄内釘内の歪の測定
1.1 骨折パターン
2つの骨折パターン、(i)42-C2および(ii)43-A3が試験された。
【0099】
中軸42-C2骨折に対して、1対の横方向の切込みが、脛骨の近位の端部から24cmで、5mmの間をあけて入れられた。別の1対の切込みが、さらに60mm離れて入れられる必要があった。2つの5mm骨片を取り除くことによって、3つのセグメントが作成され、中央セグメントが釘によって固定され、遠位のおよび近位のセグメントがクロスねじによって固定された。骨折隙間が、粉砕骨折の多数の骨片を表している。骨折部は、計装化された髄内釘の遠位の端部のポケット6および近位の端部のポケット4と整列された。
【0100】
遠位の骨折部が、近位の、遠位のねじ穴の上方30mmおよび40mmで骨を横に切ることによって作成された。作成されたセグメントが、除去された。骨折部は、計装化された髄内釘のポケット8と交差した。
【0101】
髄内釘が、骨の端部へ延びる管によって、12mmの直径へ2mmだけオーバーリーマ加工されたSawbones(登録商標)内に挿入された。
【0102】
1.2荷重リグ
釘のための荷重リグが、図4に示すように、調節可能な上部プラットホームを有するアルミニウムフレームを使用して構成された。ロードセルが下部表面上に配置され、これが次に、釘の遠位の端部を収容するために、反トルクジグによって装着される。ワイヤが出るための穴がここに位置しているため、釘の下部表面がアクセス可能であることが重要である。
【0103】
使用されるロードセルは、曲げ、内部および外部トルク、および軸方向荷重を測定するように設計されている。
【0104】
Sawbones(登録商標)が、両端に、2個のボールを介して装着された。解剖学的な中線に対して内側の9mmおよび23mmのオフセットが、それぞれ、遠位および近位の端部での荷重付加のために使用される。このオフセットは、脛骨の動作の機械的な線をより代表している(Hutsonら、1995)。近位の荷重点が、所望の位置(中線に対して内側の23mm)をマークすることによって構築され、次にこの領域を覆ってワッシャが配置される。金属ワッシャが、Araldite接着剤を使用して固定される。金属ワッシャ内の中央穴は、近位のボールを収容し、荷重伝達点を形成することができる。適切な大きさにされた遠位の小さい金属キャップが、骨内に作成された2個の小さい穴に嵌合することによって、骨上に嵌合される。このキャップは、ワイヤの出口のための骨のリーマ加工された管と重なる穴を有し、また、中線に対して内側の9mmに遠位のボールを収容するための小さいソケットを有する。ボールは、脛骨の遠位の端部を定位置に固定する反トルクジグによって、ロードセルの上部と連通している。
【0105】
1.3軸方向荷重付加
軸方向荷重付加が、上部プラットホームに固定された調節可能なねじを介して行われた。ねじが、脛骨上の荷重ワッシャと位置合わせして配置された。ねじが、ばねと接続された。ねじは、ボールと連通している。ばねの周囲に配置された金属キャップが、その運動をガイドする一方で、最小の拘束を提供する。キャップは、ばねが圧縮下にあるとき、ボールが上へすべることができるよう十分大きい。
【0106】
1.4トルク付加
トルク付加は、プーリーシステムを介して行われた。100mmクロスバーが、近位の骨の端部を水平方向に通過し内外側(ML)方向に走っていた。少なくとも10kgの重りに耐えることができる1対のワイヤが、バーの端部に取り付けられており、同じ水平方向平面内でプーリーの上を通過していた。トルクが、ワイヤの端部に重りを吊るすことによって付加された。他方の側へワイヤを揺動させることによって、反対方向へのトルクの付加が可能になった。
【0107】
内踝の両側の定位置に保持された1組のプレートが、反トルクを付加するための方法を提供した。クロスバーが、踝を通って前後(AP)方向に挿入され、両方のプレートを通って走り、プレートが、ねじりを防止するのに十分締まることをゆるし、プレートが骨を脱臼させることを防止する。
【0108】
5kgの最大値まで500gの増分で、時計方向および反時計方向の両方で、5Nmまでのトルクが付加された。
【0109】
1.5ステップバイステップ方法
1釘を挿入する
2荷重リグ内に骨釘構造を配置する
3ワイヤを増幅器と接続し、Labview v8の運転を開始する
4荷重を開始する。トルク測定が、0、250、500、750および1000Nの軸方向荷重で行われる。時計方向および反時計方向で、500g重りの増加する増分が、5kgまで追加される。軸方向荷重が、0から1000Nまで、50Nの増分で増加される。構造をアンロードするとき、軸方向測定のみが必要とされる。各荷重設定で、新しいデータの組が、収集される必要がある。
5骨を取り除き、釘を取り出す。
6各荷重サイクルを繰り返す。
【0110】
1.6データ解析
データ解析が、各荷重付加に対する平均歪値の計算を介して行われ、次に2つの変数で重回帰分析が行われた。これらの2つの荷重のタイプに応答してさまざまなゲージでの歪のパターンを観察するために、回帰分析が、軸方向荷重およびトルクに関して行われた。
【0111】
2. 3点曲げ下での計装化された髄内釘の歪の測定
2.1骨折パターン
4つの骨折パターンが試験された。(i)整復されていない中軸粉砕分節骨折(42-C2)、(ii)整復されていない遠位の関節外粉砕骨折(43-A3)、(iii)整復された単純横骨折(42-A3)および(iv)整復された単純らせん状骨折(42-A1)。
【0112】
2.3荷重リグ
荷重リグが、図5に示されている。
【0113】
釘骨複合物が、2つのテストチューブクランプに取り付けられた2本の糸を用いて水平方向に懸下される。骨上に鉛直方向に固定されたスピリットレベルおよびドリルビットを使用して、釘が両方完全に水平方向にあること、および重要なことには、釘の前方表面が上を向き、水平方向に対して垂直であることに注意が払われる。この配置は、0°のインライン前方ポケットゲージが、力の付加方向に対して垂直であることを確実とし、このようにして釘の長手方向の圧縮および延びを検知するように最適に配置されるようになる。このジグは、X、YおよびZ平面内に付加される荷重による、釘骨複合物の運動を可能にする。これは、2つの骨の端部が、堅固に固定されていないためである。近位では、懸下点が、腕骨内顆および脛骨外顆内の2つのねじから成る。遠位では、糸が、突出した遠位のロッキングねじに取り付けられている。
【0114】
釘-骨複合物に歪を付加するために、重りが、糸およびフックを用いて、水平方向に懸下された骨から懸下されている。重りは、釘の長さに沿った5つの異なる位置に配置される。骨がそこから懸下されている近位の脛骨の顆ねじが、ゼロ基準値である。この基準値から、センチメートル単位での重り懸下位置は、9、13.5、18、22.5、および27である。この実験設定は、膝関節で側副靭帯および十字靭帯によって脛骨に与えられる回転自由度を模擬している。これらの位置のそれぞれで、0kgから始まり1kg増分で、最大10kgでの重りが加えられる。Wehner 2009に基づいた歩行サイクル中、10kgは、脛骨の受ける生理学的荷重を代表するものである。このようにして、5つの位置のそれぞれで、11の歪値対荷重測定が、行われる。4つの骨折パターン55(11×5)のそれぞれに対して、歪値対荷重測定が、行われる。
【0115】
測定の再現性を評価するために、荷重は、中央位置(近位の取付点から18cm)で、0〜10kgまで1kg増分で付加された。歪値対荷重測定が行われた。この同じプロセスが3回繰り返された。
【0116】
B.RSA方法論
3.軸方向およびねじり荷重下での脛骨の骨折に固定された髄内釘内の骨片間運動の測定
精度および精密度実験
3.1X線エネルギーレベル設定
Sawbones(登録商標)に荷重を与えるリグが、ほぼ放射線透過性である金属であるアルミニウムのバーから構成された(図4参照)。定位置の荷重リグで行われるRSA撮影が、90kVで行われた。
【0117】
3.2放射線写真技術
RSA設定は、3D座標系を生成するために使用されるタンタルビードを含む補正ケージ(ケージ43、RSA BioMedical、Umea、Sweden)から成る。X線は、2 AGFA CRMD4.0 General Cassettes(350mm×420mm)上で撮影され、AGFAフォーマットで処理され、次にDICOM Linkへ送信される。画像が、UmRSA Digital Measure6.0へインポートされ、ここで基準および骨マーカーがラベル付けされる。骨マーカーは常時、近位のセグメントに対して201、202...のように、遠位のセグメントに対して301、302...で番号が付けられる。運動学に関連するデータが、UmRSA解析6.0から得られる(RSA BioMedical、Umea、Sweden)。運動学データは、「セグメント運動」法(セグメント20に対するセグメント30の変位)を使用して、近位の骨片に対するSawbones(登録商標)脛骨の遠位の骨片の定着を示している。
【0118】
3.3タンタルビード
0.8mmの直径を有する球形のタンタルビードが(RSA BioMedical、Umea、Sweden)、骨マーカーとして使用される。
【0119】
3.4線形変位に対する精度および精密度プロトコル
1cmの遠位の第3の骨折隙間を有するSawbones(登録商標)が、x、yおよびz軸での線形変位に対するRSAの精度および精密度を決定するために使用された。8個のタンタルビードが、ドリルおよびばね付加されたピストンを使用して、切骨部に最も近い領域内のSawbones(登録商標)の近位および遠位の部分に挿入された(RSA BioMedical、Umea、Sweden)。図6に示すように、X線チューブが、下を向いたセットの上方に配置された。補正ケージが、放射線透過性のテーブルの下に配置され、その上に仮想モデルが配置された。
【0120】
Sawbones(登録商標)の近位のセグメントが、x、yおよびz軸での並進運動を測定するために、2本のプラスチック釘を介して高精密度並進運動台(M-460A-xyz、Newport、Irvine、CA、USA)に取り付けられた。3個のVernierマイクロメータ(モデルSM13、Newport、Irvine、CA、USA)が、並進運動台に取り付けられた。Newport companyによると、この設定は、並進運動に対して1μmの精度を有する。並進運動台が、ねじによってPlexiglasベースに取り付けられた。Sawbones(登録商標)脛骨の遠位のセグメントが、プラスチック釘によってベースに固定された。
【0121】
人工脛骨の近位のセグメントが、100μmの増分で遠位のセグメントに向かって移動され、同時フィルムペアが、各点で撮影された。X線ビームが、仮想モデル内で骨折と直接交差した。近位のセグメントが遠位のセグメントに1mm近づくまで、これが10回繰り返された。y軸変位の間に、および最後にz平面内の運動のために、同一のプロトコルが測定を行うために追従された。また5回の放射線ペアが、ゼロ変位で撮影された。あと5回、行われた。各回で、マイクロメータは、0μmから10μmへ次に0μmへ戻るように移動した。
【0122】
3.5y回転および角運動(z軸回転)に対する精度および精密度プロトコル
y軸回転での精度および精密度を測定するために、高い精密度の回転台が使用された。(M-UTR-80、Newport、Irvine、CA、USA)これは、木製の底板に螺合され、木製のブロックおよびプラスチック釘を介してSawbones(登録商標)の遠位のセグメントと接続された(図7;上側画像)。回転台の精度は1/60°であった。遠位のセグメントは時計方向に5°、次に反時計方向に5°移動され、回転運動の1°ごとにX線が撮影された。人工の脛骨の近位のセグメントは、2本のプラスチック釘によって木製の背板に堅固に取り付けられていた。
【0123】
角運動の測定のために、同じ並進運動台(図7;下側画像)が、前と同様に使用されるが、今回は、1個のVernierマイクロメータのみによる。これは、木製の背板に螺合され、木製のブロックに取り付けられ、Sawbones(登録商標)の両方のセグメント上に押圧された。骨折した脛骨の角運動を模擬するために、Sawbones(登録商標)の両セグメントが、プラスチック釘を使用して、z軸回転を可能にして、背板上に装着された。マイクロメータが、xの負方向に5mm、近位のセグメントの遠位の端部および遠位のセグメントの近位の端部を押圧した。これは、500μmの増分で5mmまで行われ、セグメントをy軸とより整列させた。このことは、内外方向に付加された荷重の結果生じる角運動(z軸回転)を測定するとき、RSAの精度および精密度を確立するために行われる。
【0124】
3.6精度および精密度計算
精度および精密度が、全線形変位、ならびに3つの平面の線形運動のそれぞれに対して決定される。類似の測定が、角運動およびy軸回転のために行われる。
【0125】
精度、測定値の真の基準値への近さ(Bragdonら、2002)が、線形回帰解析を使用し、測定されたRSA変位結果値を真のマイクロメータ値と比較し、95%予測区間を計算し、SPSS(version 14.0 for Windows(登録商標)、Chicago、IL)を使用することによって決定されうる。予測区間に対する最大および最小境界が決定され、区間の平均が精度として示されることが可能である(Onstenら、2001)。
【0126】
精密度は、繰り返した場合に同じ結果が得られる可能性である(Valstarら、2005)。この研究での精密度はp=±(y)(SE)として計算された(Altman、2000)。yの値が、95%信頼度レベルに対して決定され、自由度=誤差値の数-1である。(Bragdonら、2002)。真の値を取得し、測定値を引くことによって誤差値が規定される。これは、それから標準偏差および標準誤差が決定されうる全体平均誤差を与える。
【0127】
荷重実験
3.7軸方向およびねじり荷重
Sawbones(登録商標)の中心から近位の端部で23mm、および遠位の端部で9mmだけ内側にオフセットされて1000Nの軸方向荷重が、歩行サイクルの単一の脚間隔でピーク荷重の間脛骨が受ける合力を模倣した(Hutsonら、1995)。
【0128】
5Nmのトルクが、付加された。
【0129】
3.9荷重プロトコル
骨A
無傷のSawbones(登録商標)が、荷重リグ内に配置された。この特定のSawbones(登録商標)は、12mmまでリーマ加工されるが、髄内釘が挿入され、前にそれから約15回除去された。タンタルビードが、ドリルおよびばね付加されたピストンを使用して埋め込まれた(RSA BioMedical、Umea、Sweden)。しかし、Sawbones(登録商標)は非常に硬いため、3個のマーカーだけが遠位のセグメント内に作成された。人工の脛骨に荷重を付加し、どのくらいの荷重を骨が得たかを識別することが可能であった。増幅器へ通過するSawbones(登録商標)の遠位の端部の下に配置された、リグ内のロードセルからの情報および出力が、LabVIEW v8を使用して解釈された。軸方向荷重が、250Nの増分で1000Nまで付加された。各レベルで、同時フィルムペアが、軸方向荷重のみの下の骨で撮影された。+5Nmのトルクで軸方向に荷重をかけ、最後に-5Nmのトルクで軸方向荷重をかけた。定位置に全部で4本のロッキングねじを有する同じ釘を使用して手順が繰り返された。
【0130】
骨B
無傷のSawbones(登録商標)が、髄内釘を挿入されて、荷重リグ内に配置された。このSawbones(登録商標)は、12mmまでリーマ加工され、髄内釘が挿入されて、前に1回除去される。タンタルビードが、Araldite(登録商標)接着剤で付着される。8個のマーカーが近位のセグメントへ付着されるが、7個のみが遠位の部分に付着して残される。同じ荷重プロトコルが、上記で概略を述べたように追従される。髄内釘が、定位置に残され、4本のロッキングねじが挿入され、手順が再び繰り返される。釘がその後、取り外される。関節外骨幹端複雑骨折(43-A3AO分類)が、AP遠位のねじ穴の上方3cmおよび4cmに、2つの横切込みを作製し、1cmの隙間を作製することによって模擬された。43-A3骨折は、遠位および近位の脛骨のセグメントを分離する中間骨片の数に従って副分類される(AO Surgery Reference、2009)。これらは、繰り返さないが、しかし、その代わり脛骨片の間の1cmの隙間で表されている。計装化された髄内釘およびロッキングねじが、次に、骨内に再挿入され、同じ荷重手順が繰り返される。
【0131】
骨C
無傷のSawbones(登録商標)が、荷重リグ内に配置された。このSawbones(登録商標)は、12mmまでリーマ加工され、髄内釘が挿入されて、前に1回除去される。9個のタンタルビードが、Araldite(登録商標)によってSawbones(登録商標)近位のおよび遠位のセグメントに糊着されるが、2個のマーカーが、解析中廃棄される。髄内釘が、4本のロッキングねじによって定位置に挿入された。測定が、前のように行われた。ねじおよび釘が取り外された。中軸複雑分節骨折(42-C2AO分類)が、人工の脛骨の近位の端部の下方20.75cm、21.25cm、27.25cmおよび27.75cmに4つの横切込みを作製することによって模擬される。これは、長さ6cmの中間セグメントを作製する。これは、5mmの隙間によって近位のおよび遠位のセグメントの両方から分離される。楔状の骨片の存在は、42-C2骨折のさらなる副分類を必要とする。しかし、この特定のシナリオでは、目的は、楔状骨片を有さない42-C2.1を再作成することである(AO Surgery Reference、2009)。釘およびねじが再挿入され、前に概略を述べたのと同じ状態の下で測定が行われる。
【0132】
4.3点荷重下での髄内釘内の骨片間運動の測定
RSAが、付加される荷重による骨折部位での6自由度での運動(X、YおよびZ平面内での線形変位および回転)の程度を決定するために使用される。
【0133】
3点荷重リグが、RSA補正ケージの前に配置される(図8)。5個のタンタルビードの最小のものが、すべてのSawbones(登録商標)の間を一定の間隔にして、骨折位置のいずれかの側に配置される。
【0134】
釘-骨複合物が、近位の顆ねじの固定点に対して3つの位置に装着される。装着位置は、9、18および27cmである。500mgのフック重りが、0kgを始点として使用される。2kgの増分重りが10kgの最大値まで追加される。増分重りに対する各位置で、2のX線機械から1枚のデジタルフィルムが撮影される。
【0135】
Sawbones(登録商標)のそれぞれに対して、合計で18(3つの位置×6個の重り)枚のデジタルフィルムが撮影され、X、Y、Z平面で骨折部位での荷重対線形および回転変位の測定値を導出するために使用される。
【0136】
X線が、Agfa(登録商標)プロセッサを使用してデジタル処理され、UmRSA(登録商標)処理ソフトウェアへ電気的に送信される。各測定状態の2つのX線を転置し、3次元空間内で補正ケージに対する各骨折端部のタンタルビードを補正することによって、我々は、荷重増加による骨折した骨端部の相対的な変位を定量化することが可能である。このデータはまた、各骨折構成の釘骨複合物、および我々の強化ポリエチレンテープで模擬された「仮骨」の剛性を計算するためにも使用される。
【0137】
5.計装化した釘(仮骨シミュレーション)によるSawbone(登録商標)の剛性の変化の検知
骨折部での、およびしたがって模擬仮骨の剛性の増加を達成するために選択される方法は、骨折を横切る強化ポリエチレンテープのループを付加することである。4つの異なる剛性が、最大で16ループまで、4の倍数の増分のループで強化ポリエチレンテープを付加することによって模擬される。図9は、4ループの強化ポリエチレンテープを使用することを示している。付着される強化ポリエチレンテープの幅は、骨折を横切るタンタルビードの分離に等しい。これらのパラメータの両方は任意である。
【0138】
整復された42-A3骨折が、剛性の変化を検知する釘の能力を試験するために選択された。整復された骨折は、骨折隙間でより少ない運動を与え、したがって、釘の検知能力に対するより激しい変化を表し、結果のより大きな変動をもたらす。
【0139】
RSAが、模擬される「仮骨」の剛性を決定するために使用された。剛性は、変形(曲げ、伸びまたは圧縮)に対する身体の抵抗として定義された。数学的には、これは次のように表される。
【0140】
【数1】
【0141】
Fは、ニュートン単位での付加された力またはモーメントであり、δは、力によって生成された変位である。SI単位は、Nm-1である。
【0142】
C骨折タイプ、骨折位置、仮骨成熟、付加された荷重および歪ゲージの位置との歪の相関関係
(i)人工仮骨の形成
図30に示すように、仮骨は、特徴的な圧縮係数をそれぞれ有する組織の層から成る。(Lacroixら、2001)
E1=肉芽組織(E=0.36MPa)
E2=線維組織(E=1.52MPa)
E3=軟骨(E=11.4MPa)
E4=未熟な骨(E=1.24GPa)
【0143】
以下の人工の類似物質は、仮骨組織の層を模倣するように設計され、骨折治癒の初期の段階を模擬するための、骨の周囲に層状化される。
E1=15%ステンレス鋼(SS)+ポリウレタン注入化合物
E2=15%ヒドロキシアパタイト(HA)+ポリウレタン注入化合物
E3=15%スズ(Sn)+ポリウレタン注入化合物
E4=10% Beech wood shavings(BW)およびAraldite、2014。
【0144】
層状化は、円周上に(C)(図30)、または(ii)離散した四分区間で分割して(S)(図31)のいずれかである。
【0145】
仮骨成長の離散した四分区間の付加順序は次の通りである。
1.外部の仮骨ブリッジ-後方の平面;1日目に付着:層E1-4
2.外部の仮骨ブリッジ-内側の平面;2日目に付着:層E1-4
3.外部の仮骨ブリッジ-外側の平面;3日目に付着:層E1-4
4.外部の仮骨ブリッジ-前方の平面;4日目に付着:層E1-4
【0146】
(ii)計装化した釘に付加された歪/荷重対仮骨成長/剛性の測定
使用された骨折モデルは、整復された42-A2-AO骨折である。
【0147】
計装化した釘が、骨折部位に隣接して、または骨折部位から離れてのいずれかで、(A)45°、(B)0°および/または(C)-45°に方向づけられた、歪ゲージを備える。
【0148】
釘は、治癒の最初の4〜6週間に、以下の荷重パターンを受ける。
- 立脚位「軸から外れた軸方向圧縮荷重」
- 立脚位「4点曲げ荷重」
- 1000N圧縮でのトルク荷重0〜25N.m
【0149】
結果
1.釘内の掘り込まれた歪ゲージの使用による脛骨の骨折部内の髄内釘での軸方向およびねじり荷重に関する歪の測定
軸方向荷重
ゲージBが、釘の長手方向軸と一直線上にあり(すなわち0°)、軸方向歪に対して最も感度が高いように設計されている。付加される軸方向荷重に関する歪値の回帰が、各歪ゲージに対して行われ、図10に示されている。このグラフは、次のようないくつかのキーコンセプトを示している。
【0150】
(i)歪値は、釘の前方の態様上のゲージで最小であり(ポケット1、4および7)、後内側のゲージ(ポケット2、5、8)でより高く、後外側のゲージ(ポケット3、6)でより低い、釘の円周の周囲で歪の差がある。
【0151】
(ii)パターンおよび歪の大きさの両方が、3グループのデータの間でまったく一定である。ねじなし無傷骨およびねじあり無傷骨および無傷骨2。1つのとび値、ねじを備える無傷の骨内のポケット7B内のゲージがあるが、しかしこれは、誤った接続へ追尾されており、さらなるデータ収集の前に修復される。
(iii)2つの骨折が、3つの無傷のシナリオで観察されたパターンから大きな偏差を示し、R2での差の大きさは、骨折部位に近づくほど大きくなっている。
【0152】
トルク荷重
ゲージAおよびC(釘の長手方向軸に対してそれぞれ+45°および-45°で方向づけられた)が、互いに対して垂直に配置され、両方が、トルクに対して感度が高いように設計されている。理論上、それらの相対的な配置は、等しいおよび反対の歪値結果となるべきである。
【0153】
図11は、次のようないくつかのキーコンセプトを示している。
(i)無傷でない、固定されていない釘で、最小の歪応答。
(ii)無傷の、固定された釘に対しての釘の長さに沿った歪の等しい分配。
(iii)遠位の中軸骨折に対して骨折した骨がポケット6を頂点としてゲージ位置が、より遠位に移動したとき歪の大きさの増加。
(iv)軸方向圧縮よりもねじりでのほうが、釘歪が大きい。
【0154】
主歪の大きさおよび方向
所与の位置でのすべての3のゲージに対して得られた歪値を合算することによって、特定のゲージに関する歪の大きさおよび主歪の方向を決定することが可能である。
【0155】
図12および13は、軸方向力およびトルクの下での中軸骨折(42-C2)に対する歪の大きさおよび主歪の方向を示している。いくつかのキーコンセプトは次の通りである。
(i)トルクおよび軸方向力の両方に対して歪の大きさの大きな変化がある。この変化は、ポケット5および6内のゲージによって検知された骨折部位近づくほど大きくなる。
(ii)骨折は、軸方向歪よりもねじりに与える影響が大きい。
(iii)ポケット6および7内のゲージによって検知される軸方向荷重以外は、主歪の方向は、あまり変わらないようにみえる。
【0156】
図14および15は、軸方向力およびトルクの下での遠位の骨折(AO42-A3)に対する歪の大きさおよび主歪の方向を示している。いくつかのキーコンセプトは次の通りである。
(i)歪の大きさが中軸骨折と比較して遠位で増加している。
(ii)主歪の方向が、軸方向力の付加と比較してねじり応力に対して相対的に影響されない。
(iii)歪の方向が、骨折した骨内でゲージBとより一直線上にある。歪方向が、釘の長手方向軸と一直線上にあるように変化したことを示している。
【0157】
RSAを使用した軸方向およびねじり荷重下での髄内釘内の骨片間運動の測定
骨片間運動の精密度および精度測定
放射線写真を解析するとき、Sawbones(登録商標)内に挿入されたすべてのタンタルマーカーを見ることが可能である。UmRSA(登録商標)ソフトウェアによって測定された定着と「最も基準となる」マイクロメータの間の差がゼロではないため、精度および精密度計算が行われる。
【0158】
タンタルビードが、Sawbones(登録商標)の各セグメント内に不規則な方式で挿入され、各セグメント内でのそれらの相対的な配置が、「状態数」として公知の測定によって定量化される。状態数は、タンタルビードの配置によって変化する。低い数は良好なマーカー分散を示し、高い数はマーカーがより線形の方式で配置されていることを示唆している。
【0159】
線形変位に対する剛体フィッティング(ME)値の平均誤差は、近位の骨片に対して2μmから21μmの間で、および遠位のセグメントに対して4μmから18μmまで変動する。これらの値は、角運動で見られたものと同様である。近位のセグメントに対して2μmから12μmの範囲であり、遠位のセグメントに対して5μmから20μmの範囲であった。y軸回転に対して、近位のセグメントに対するME値は、2μmから15μmの間に広がり、遠位のセグメントに対するME値は、6μmから15μmの間で変動した。
【0160】
角運動およびy軸回転の状況では、精密度を計算するために使用されるタンタルビードの数が8から3に減少すると、状態数が増加した。y回転については、3個マーカーで測定したときが(0.145°)8個のマーカーで測定したときよりも(0.099°)精密度が1.46倍だけ減少した。角運動では、8個(0.01°)よりも3個のマーカー(0.095°)を使用して計算したとき精密度が9.5倍悪くなった。
【0161】
x、yおよびz平面内での線形運動の精密度もまた、マーカーの量が減少したときに状態数が増加することを表している。線形変位に対する最良の精密度は、8個のマーカーで計算したy軸運動に対するものであり(±10.7μm)、最悪のものは、8個のマーカーを使用して測定したz軸運動である(±144.7μm)。xおよびy軸線形変位に対しては、マーカーの数および状態数は、精密度への影響をほとんど有さないようにみえる。
【0162】
y軸回転について、予測区間の平均値、すなわちRSA測定の精度が、±0.04°から±0.136°(R2≧0.998≦1、p<0.0005)の間で変動する。角運動は、±0.036°から±0.04°(R2≦1、p<0.0005)の間の範囲の精度を有する。両タイプの運動では、3個のみのタンタルビードが計算のために使用されていたとき、最悪の精度が測定された。y軸回転の場合、マーカーの数を8から3に減少させると、すなわち状態数が増加すると、精度が3.3倍減少した。
【0163】
線形変位に対する精度は、±4.46μmから±60.3μm(R2≧0.962≦1、p<0.0005)の範囲であった。並進運動に対する最良の精度はy軸のものであり、最悪の精度はz軸のものであった。xおよびy軸では、タンタルマーカーの数およびそれらの分散の程度は、精度値への影響をほとんど有さないようにみえる。
【0164】
骨片間並進運動/微細運動測定
図16は、無傷の骨内の近位のセグメントに対する遠位のセグメントのY軸並進運動(微細運動)を示す。
【0165】
図17は、無傷の骨内の近位のセグメントに対する遠位のセグメントのY軸回転を示す。
【0166】
図18は、AO43-A3骨折部内の近位のセグメントに対する遠位のセグメントのY軸並進運動(微細運動)を示す。
【0167】
図19は、AO43-A3骨折部内の近位のセグメントに対する遠位のセグメントのY軸回転を示す。
【0168】
図20は、AO42-C2骨折部内の近位のセグメントに対する遠位のセグメントのY軸並進運動(微細運動)を示す。
【0169】
図21は、AO42-C2骨折部内の近位のセグメントに対する遠位のセグメントのY軸回転を示す。
【0170】
3.脛骨の骨折での髄内釘内の3点荷重に関連する歪の測定
さまざまな骨折構成(AO:42-A3、42-C2、43-A1、骨折していないsawbone(登録商標))の歪ゲージの感度に対する影響の試験
結果およびグラフを解釈するとき、歪ゲージポケットに対する骨折の位置を記述することが必須である。この関係は、以下の通りである。
1.整復されたAO42-A3単純横骨折-ポケット6(ポケット5および7が隣接している)に重なる。
2.整復されていない横骨折AO43-A1-ポケット8に重なる。
3.整復されていない分節骨折AO42-C2-ポケット4、5および6に重なり、近位のおよび遠位の骨折線が、ポケット4および6にそれぞれ重なる。
【0171】
図22は、歪ゲージポケットの数に対してプロットされた感度(マイクロストレイン/kg)を示し、分節骨折と、2つの脛骨の懸下点の間18cmで中間に付加されている荷重モーメントの関係を示している(近位のおよび遠位の脛骨の懸下点の間距離=36cm)。この整復されていない骨折構成では、近位のおよび遠位の骨折線が、ポケット4および6とそれぞれ重なり、骨折セグメントがポケット5と重なる。基準線からの感度(マイクロストレイン/kg)の最大の変化が、0°ゲージでみられる。これらのゲージでは、最大のたわみが、ポケット4、近位の骨折線、セグメントの下にあるポケット5および遠位の骨折線の下にあるポケット6で生じる。モーメントはこの場合、ポケット4および5の間の18cmの所に付加される。我々はこのようにして、3点荷重ではこれらが基準線からの最大のたわみを示すため、測定のために8個のポケットのそれぞれで0°ゲージを選択することを正当化することができる。
【0172】
図23〜26は、無傷のSawbone(登録商標)および3個の模擬されたsawbone(登録商標)骨折(それぞれAO42-A3、43-A1、42-C1)に対する、歪ゲージポケットの位置に対する感度(マイクロストレイン/kg)をプロットしている。プロットのそれぞれが特定の骨折を表す際に、5つの付加されるモーメントも示される。
【0173】
図23は、5つの別々の位置で3点荷重を受ける無傷のSawbone(登録商標)に対する歪ゲージポケットに対する感度のトレース図を示している。これは、正のピーク感度が、張力下のゲージ内で生じることを示している(ポケット2、3、5、6および8)。これらは、釘の凸状の側の内側および外側のポケットである。負のピーク感度は、圧縮下のポケットで生じる(1、4および7)。これらは、釘の凹状の側の前方のポケットである。無傷の38cm脛骨Sawbone(登録商標)では、ポケット2、5および8で正の感度ピークの3モードの分布があるようにみえる。これらは、外側のポケットに対応している。荷重の間の外側表面上での釘の回転の結果、内側のポケットの感度はより低い可能性がある。荷重がそれに付加された場合ポケットの感度が増加することも観察できる。骨折が存在しないため、我々は、8個の歪ゲージポケットのすべてが等しい感度を有し、これらの感度は、モーメントの付加位置によってのみ影響を受けることを予測したであろう。したがって、我々は、同様のピーク感度を有する対称なグラフを予測したであろう。我々のグラフでの不一致は、より感度が高いゲージが、モーメント付加点により近いという事実によって説明される。
【0174】
図24は、ポケット6(ポケット5および7が隣接している)と重なるAO42-A3骨折を示している。骨折部位に最も近いポケットもまた、この骨折構成では最も感度が高い。骨折部位の下のポケットに、この場合22.5cmで、モーメントを付加することによって、感度が、最大化される。
【0175】
図25は、ポケット7と8の間に重なるAO43-A1骨折を示している。ポケット7および8は、歪ゲージ感度が最大である27cmでのモーメントで、最も感度が高い。
【0176】
図26は、ポケット4、5および6に重なるAO42-C2骨折を示しており、近位のおよび遠位の骨折線が、ポケット4および6とそれぞれ重なっている。この分節骨折では、パターンが繰り返される。ポケット4および5が、最大のたわみを示している。我々はしかし、ポケット6がポケット7よりも大きいたわみを示すことを予測したであろう。
【0177】
以下の図23〜26から、次のことが観察される。
1)3点荷重を受ける3つの骨折構成の場合、最大の感度は、骨折部位に最も近い歪ゲージで得られる。
2)骨折部位に曲げモーメントを付加することは、下にある歪ゲージの感度を300歪値/kgまで最大化する(骨折AO42-C2で)。
3)歪ゲージは、骨折していないおよび整復されたSawbones(登録商標)によって示されたように、釘骨複合物が強化されたとき、より感度が低くなる。
4)骨折していないsawbone(登録商標)では、骨折したSawbones(登録商標)で見出されたのと同じように、歪ゲージポケットへ曲げモーメントを付加することが、その感度を増加させる。8個の歪ゲージポケットすべてが、ほぼ等しい感度を有するようにみえる。
【0178】
3点荷重に応答した骨片間運動
RSA方法論を使用することには2つの目的がある。RSAの第1の目的は、歪値対荷重(Kg)測定を制御する働きをすることである。第2の目的は、骨折部位で、付加された曲げモーメントと曲げの関係が確立されることを可能にすることである。
【0179】
これらの結果は、模擬された「仮骨」剛性が生理学的な代表値であることを示すためのものである。
Z平面内の回転が、骨の曲げを測定するために選択された。
結果(図27)は、荷重の増加によるZ回転の増加があることを示している。このことは、荷重の増加とともに増加する(引張下にあるとき、圧縮下では減少する)歪値の読取値を確認している。
【0180】
前記計装化した釘(仮骨シミュレーション)によるSawbones(登録商標)の剛性の変化の検知
図28は、釘-骨複合物の剛性を徐々に増加させたときの歪ゲージポケットに対する感度のトレース図である。複合物の剛性が高いほど、ピーク感度はより小さい。(キー:DT=強化ポリエチレンテープ、数は、強化ポリエチレンテープのループの数を示す)。
【0181】
このグラフは、計装化した釘が剛性の変化を検知できるという概念を支持している。この能力は、釘-骨複合物剛性の経時的な変化に基づく癒合遅延および非癒合を検知することができるその究極的な役割を満たす場合、計装化した釘の必須の特性である。
【0182】
強化ポリエチレンテープ「仮骨」シミュレーションの剛性を定量化するために、DT-4ループおよびDT-8ループモデルで、RSAが行われた。
【0183】
4および8ループ強化ポリエチレンテープ「仮骨」モデルに対する荷重でのZ平面内の回転のRSAトレース図(図29)が、勾配の逆数を計算することによって剛性の定量化を可能にする。
【0184】
模擬される「仮骨」釘-骨複合物の剛性は、以下のように計算される。
DT-4ループに対して、Z回転勾配=-0.076度/kg、したがって剛性=1/勾配=13.15kg/°=131.5N/°。モーメント18cm=23.6Nm/°。
DT-8ループに対して、Z回転勾配=-0.065度/kg、したがって剛性=1/勾配=15.4kg/°=154N/°。モーメント18cm、剛性=27.7Nm/°。
【0185】
強化ポリエチレンテープなしでの骨折の勾配は、DT-4およびDT-8に対してよりも大きな剛性を示している。しかし、2つの変数の間の相関関係は、この場合も低い。このことは、これが、接着の結果であることを示唆している。
【0186】
4および8ループの強化ポリエチレンテープによって模擬される「仮骨」の矢状平面内の剛性は、それぞれ23.6Nm/°および27.7Nm/°に等しい。8ループ「仮骨」は、予想よりも剛性が高く、1度の回転を生成するためにより大きなモーメントを必要とする。両方のシミュレーションは、人の骨の仮骨剛性のおそらく生理学的範囲内にある。Richardsonらによる業績から、脛骨の癒合点の仮骨は、矢状平面内で15Nm/°の剛性を有するように考慮されうる。
【0187】
計装化した釘は、少なくとも27.7-23.6=4.1Nm/°の剛性の差を検知することができる。このように、釘は、生理学に関連した剛性の変化を検知することができるのに十分な解像度を有する。最終的には、釘は、仮骨形成の最初の1か月での剛性の変化を検知することができるほど十分感度が高くなければならない。
【0188】
4.歪の骨折タイプ、骨折位置、仮骨成熟、付加された荷重および歪ゲージの位置との相関関係
図32
骨折モデル:
整復された骨折42-A2-AO
荷重パターン:模擬された治癒の4〜6週間中の立脚位「軸から外れた軸方向圧縮荷重」
ゲージは、ポケット4(ゲージ方向A=45°)およびポケット5(ゲージ方向B=0°)内の骨折部位の両側に配置された。
S=仮骨のセグメント付加;C=仮骨の円周上付加
【0189】
結論:
骨折部位の遠位に配置されたポケット5内のゲージBが、仮骨形成の両方のモデルで経時的な仮骨成長/剛性増加を感知することが可能である。
【0190】
骨折部位の近位に配置されたポケット4内のゲージAが、軸から外れた軸方向圧縮荷重下で、仮骨形成のいずれかのモデルで経時的な仮骨成長/剛性増加を感知するほど十分感度が高くない。
【0191】
図33
骨折モデル:
整復された骨折42-A2-AO
荷重パターン:模擬された治癒の4〜6週間中の立脚位「軸から外れた軸方向圧縮荷重」
ゲージは、ポケット1(ゲージ方向B=0°)およびポケット9(ゲージ方向B=0°)内の釘の遠位および近位の端部に配置された。
S=仮骨のセグメント付加;C=仮骨の円周上付加
【0192】
結論:
釘の前記遠位の端部に配置されたポケット9内のゲージBは、仮骨が円周上に付加される仮骨形成のモデル内で、経時的な仮骨成長/剛性増加を感知することができるが、このゲージは、ポケット5内のゲージほど感度が高くない(図32参照)。また、このゲージは、仮骨がセグメント付加される仮骨形成のモデル内で、経時的な仮骨成長/剛性増加を感知することができず、したがって、このゲージは、このタイプの骨折パターンの骨折治癒を判定するために臨床的に有用であるとみなされない。
【0193】
ポケット1内のゲージBは、仮骨形成のモデルで経時的な仮骨成長/剛性増加を感知するほど十分感度が高くない。
【0194】
図34
骨折モデル:
整復された骨折42-A2-AO
荷重パターン:模擬された治癒の4〜6週間中の仰臥位「4点曲げ荷重」
ゲージは、ポケット1(ゲージ方向B=0°)およびポケット9(ゲージ方向B=0°)内の釘の遠位および近位の端部に配置された。
S=仮骨のセグメント付加;C=仮骨の円周上付加
【0195】
結論:
ポケット1内のゲージBは、仮骨が円周上に付加される仮骨形成のモデルで経時的な仮骨成長/剛性増加を感知することが可能である。
ポケット1内のゲージBは、仮骨が、セグメント付加される、仮骨形成のモデルで経時的な仮骨成長/剛性増加を感知することが可能である。しかし、かなりの量の「ノイズ」がある。
ポケット9内のゲージBは、仮骨形成のモデルのいずれかで経時的な仮骨成長/剛性増加を感知するほど十分感度が高くない。これは、釘の遠位のセクションと髄内の管の壁との接触の結果であり得るが、これは歪測定の干渉に至ることがある。
【0196】
図35
骨折モデル:
整復された骨折42-A2-AO
荷重パターン:模擬された治癒の4〜6週間中の仰臥位「4点曲げ荷重」
ゲージは、ポケット4(ゲージ方向B=0°)およびポケット5(ゲージ方向C=-45°)内の骨折部位の両側に配置される。
S=仮骨のセグメント付加;C=仮骨の円周上付加
【0197】
結論:
ポケット4内のゲージBは、仮骨形成の両方のモデルで経時的な仮骨成長/剛性増加を感知することが可能である。
ポケット5内のゲージBおよびポケット4内のゲージCは、仮骨形成のモデルのいずれかで経時的な仮骨成長/剛性増加を感知するほど十分感度が高くない。
【0198】
図36
骨折モデル:
整復された骨折42-A2-AO
荷重パターン:模擬された治癒の4〜6週間の立脚位「1000N圧縮でのトルク荷重0〜2.5N.m」
ゲージは、ポケット1、4、5および9(ゲージ方向A=45°)の、近位のおよび遠位の端部のいずれかに配置される。
S=仮骨のセグメント付加;C=仮骨の円周上付加
【0199】
結論:
Aゲージのすべては、骨折部位に対する釘上の位置に関わらず、トルク荷重が仰臥位で付加されたとき、いずれかのモデルで経時的な仮骨成長/剛性増加を十分に感知することが可能である。
【0200】
図37
骨折モデル:
整復された骨折42-A2-AO
荷重パターン:模擬された治癒の4〜6週間中の仰臥位「ゼロ圧縮荷重でのトルク荷重0〜2.5N.m」
ゲージはポケット1、4、5および9(ゲージ方向A=45°)内の近位のおよび遠位の端部のいずれかに配置される。
S=仮骨のセグメント付加;C=仮骨の円周上付加
【0201】
結論:
同様に、Aゲージのすべては、骨折部位に対する釘上の位置に関わらず、トルク荷重が仰臥位で付加されたとき、いずれかのモデルで経時的な仮骨成長/剛性増加を十分に感知することが可能である。
【0202】
図38
骨折モデル:
整復された骨折42-A2-AO
荷重パターン:模擬された治癒の4〜6週間中の仰臥位「ゼロ圧縮荷重でのトルク荷重0〜2.5N.m」
ゲージはポケット1、4、5および9(ゲージ方向B=0°)内の近位のおよび遠位の端部のいずれかに配置される。
S=仮骨のセグメント付加;C=仮骨の円周上付加
【0203】
結論:
Bゲージのどれもが、トルク荷重が仰臥位で付加されたとき、いずれかのモデルで経時的な仮骨成長/剛性増加を感知するために満足なものとして考慮されていない。
【0204】
全体の結論
特に45°(すなわちゲージAおよびC)でのトルクゲージは、骨折部位から離れた歪の減少を検知することができるが、部位の位置を決定することはできないようである。
【0205】
オフセット軸方向荷重は、特に0°(すなわちゲージB)以外の、複数のゲージ部位から部位の位置を検知することができるが、遠位の位置の骨折部位の歪の変化を検知することができない。
【0206】
4点曲げもまた、離れた位置での歪の変化を検知することができるが、トルク曲げは同様にできない。
【符号の説明】
【0207】
1、4、7 前方ポケット
3、6 内側ポケット
2、5、8 後方ポケット
【技術分野】
【0001】
関連出願の相互参照
本出願は、2009年7月6日に提出された英国特許仮出願第0911697.1号の利益を主張する。その開示が、参照によりその全体において本明細書に組み込まれている。
【0002】
本発明は、一般に整形外科インプラントに関し、より具体的には、データ取得能力を有する整形外科インプラント、および骨折治癒の監視および診断におけるそれらの使用に関する。
【背景技術】
【0003】
長骨の骨折は、米国での致命的でない負傷の10%を占める、蔓延している問題である(Kanakaris、2007)。これらの中で、最も一般的であるのは脛骨幹部の骨折であり、米国では、1年間に77,000件近い入院の結果に至っている(Schmidtら、2003)。脛骨幹部骨折の疫学および病因学は、危険行為との関連性を示している。このタイプの骨折は、若い男性に最も蔓延しているようにみえる(Grutter、2000)。Court-Brown、1995による研究によって、脛骨幹部骨折を有する患者の平均年齢は37歳であり、最も高い発生率は、10代男性で生じることがわかった。最も一般的である2つの原因は、スポーツに関連する負傷および自動車事故である。
【0004】
脛骨の骨折に対するいくつかの分類が記載されているが、おそらく最も広く受け入れられている長骨骨折分類は、AO/OTA分類である(Arbeitsgemeinschaft fur Osteosythesefragen/Orthopaedic Trauma Association)。この分類体系は骨折のパターンのみであり、局所的な軟部組織の損傷を考慮していないようにみえる(図1)。関連する軟部組織の負傷は、脛骨の閉鎖脛骨骨折に対してはTscherneとGotzenの分類(Schmidtら、2003)に従って、および開放骨折に対してはGustilo Anderson分類(Gustilo & Anderson、1976)に従って分類されうる。
【0005】
歪の遠隔測定のために使用される計装化された釘の生体外の生体力学的研究に対して、これらの分類のうち最も有用であるのは、AO分類である。これは、すべての長骨骨折に対する英数字分類体系である。このようにして分類される骨折の一例は、42-C2である。「4」は、脛骨を表し、一方「2」は、これが、骨幹の骨折であることを示す。位置を説明したが、文字A、BまたはCは骨折のタイプ、および増加する複雑度を示すように割り当てられている。これらの副分類は、複雑度が増加するにつれて、数字1、2または3を追加することによって割り当てられる(Grutter、2000)。これらの群のさらなる副分類が、骨片の数を示すために行われてもよい。
【0006】
さまざまな骨折の中で、42-A3が、最も一般的であるようにみえ、これは、脛骨の骨幹の骨折の23.9%を占めている。(Court-Brown、1995)。
【0007】
これらの骨折の処置は、伝統的処置と外科的処置の2つのカテゴリに大きく分けられる。伝統的な治療には、ギプスまたは機能装具の使用が含まれる。外科的処置は、髄内(IM)釘固定法のいずれかの観血的整復固定術(ORIF)を含みうる。伝統的処置とORIFを比較するMETA解析によると、表層的な創傷感染のリスクがかなり減少するにも関わらず、ギプスは、20週間での低い癒合率(p=0.008)の結果となることが見出された(Littenburgら、1998)。また、ギプスは、骨折および変形の深刻度によって制限され、初期の中度または重度の変位によって癒合遅延または非癒合の率が9%から27%までも増加する。(Schmidtら、2003)。
【0008】
髄内釘固定法は、脛骨の骨折の大半に対する処置の好ましい方法であるようにみえる。(Schmidtら、2003)。この提案は、ランダム化比較試験(RCT)によって支援されている。これは、髄内釘固定法が、伝統的な処置と比較して、より速い癒合、および変形癒合率の減少を結果として生じさせることを示している(Hooper GJ、1991)。
【0009】
癒合遅延または非癒合は、脛骨の骨折での主要な関心事である。「最善のシナリオ」の計算では、1本の脛骨の非癒合のコストが、16,330ポンドであると算定されている。20%が処置の直接のコストであり、80%が間接的なコストである(Kanakaris、2007)。報告されている癒合遅延の発生は、使用される定義が任意であるため、極度の変動を示している。一般に、脛骨の癒合遅延は、20週間で認識されるが、より早期に検知することが可能である。癒合遅延は、癒合を達成するために、処置を変更することを考慮する点として考えることが可能である(Phieffer & Goulet、2006)。非癒合の定義は、成人の少なくとも9か月の骨折で、連続して3か月、治癒の放射線写真的証拠がないことであるとして、広く受け入れられている。癒合遅延および非癒合の罹患率は、それぞれ4.4%および2.5%であると報告されている。しかし、開放骨折では、癒合遅延は41%にものぼり、癒合が達成されるまでにさらなる処置を必要とする(Phieffer & Goulet、2006)。
【0010】
癒合遅延に対する処置は、原因に照らしてさまざまである。これは、大まかに言えば、固定、再釘固定(re-nailing)、骨移植、および電気的刺激、超音波または骨形成タンパク質(BMP)などの生理学的補助などの補助的な治療を含みうる。しかし、癒合遅延を早期に診断および処置することが、患者をかなりの期間の障害と痛みから救うため、タイミングが成功のための鍵である(Phieffer & Goulet、2006)が、一方、病的状態の低減による健康経済への影響も有する。
【0011】
骨折の治癒の終了点を確認するために、さまざまな方法が使用されている。これは怪我をした手足への適切な荷重負荷を患者に助言するための、または癒合遅延または非癒合のリスクを診断するための、臨床医にとって基本的な知識である。
【0012】
現在、感度の高いデータ、良好な再現性ならびに容易な使用を提供する最も基準となる方法が不足している。連続放射線写真および手での触診は、しばしば組み合わせて使用されるが、主観的であり、医師による違いを示す。デキサスキャン、振動スペクトル解析、シンチグラフィおよび超音波を使用することの不正確性および複雑性もまた、潜在的な測定ツールとして算定されている。
【0013】
遠隔測定
髄内釘は、固定を与えるように作用する一方、骨折部位に回転、曲げおよび圧縮力を伝達し、骨の解剖学的な位置を維持する。髄内釘はまた、骨が治癒するときに、荷重を骨へ徐々に移行させる荷重分散デバイスとしても作用する。
【0014】
遠隔測定は、適切に計装化された髄内釘によってもたらされる歪および荷重を直接測定し、したがって骨折治癒を妨げることなく、骨折治癒の進展の標示を与えることを可能にする。遠隔測定整形外科システムの一例が、その全体において本明細書に組み込まれるWO2007/025191に開示されている。その臨床的な使用に加えて、このような方法論は、骨折治癒およびその生体力学についての我々の理解を増加させるために大いに有益であることがわかる。これは、術後の患者ケアの最適化を可能にし、所望の機械的な環境を与えるために最も適切であると認識される骨格荷重に対するさまざまな活動の役割を評価する(Schneider E、2001)。
【0015】
釘に付加される荷重を直接測定することを可能にする歪ゲージは、従来は釘の外壁内の複数のくぼみの中に配置されており、したがって、釘の生体力学的特性の変化を生じさせる可能性を有する。このことはまた、局所的な弱体化または応力集中に至る可能性がある。
【0016】
我々は、釘上の複数の位置への歪ゲージを配置することに関連する冗長性を確認し、第1に、複数の歪ゲージを備えるくぼみに対する最適な位置、および第2に釘の長手方向軸に対する歪ゲージの最適な方向を確認した。歪ゲージは、オフセット軸方向圧縮、ねじり力または3/4点曲げ力のいずれかを受けたとき、釘内の歪を監視することが可能である。
【0017】
歪ゲージの最適な位置および方向の確認は、さまざまな骨折パターンで使用されうる、髄内釘の単一の商業用デザインの生成を容易にするであろう。
【0018】
放射線体積測定解析(RSA)
人工器官または身体の部分の3次元(3D)変位の生体内測定が、1974年にGoran Selvikによって開拓された(Bragdonら、2002)。RSAはまた、放射線体積測定またはレントゲン立体写真解析と呼ばれる。
【0019】
RSA測定は、経時的な繰り返し撮影された1対の同時の放射線写真を使用して得られうる。タンタルビードマーカーが、精査を受ける各剛体を定義するために必要とされる少なくとも3つの同一直線上にないビードによる研究の下で、身体部分またはインプラントセグメント内に埋め込まれる(Valstarら、2005)。よく定義された、移動しない位置でタンタルビードとともに埋め込まれた補正ケージを用いて、3次元座標系が獲得される。隣合わせに置かれた2枚の放射線写真が、一平面上の配置で、または二平面配置の場合互いに対して90度で(Valstarら、2005)、マーカーの3次元座標を確立するために使用され、剛体間の変位が、市販されているRSAソフトウェアシステムを使用して計算されることが可能である(Madanatら、2006)。
【先行技術文献】
【特許文献】
【0020】
【特許文献1】英国特許仮出願第0911697.1号
【特許文献2】国際公開第WO2007/025191号
【非特許文献】
【0021】
【非特許文献1】Bragdon, C. R., Malchau, H., Yuan, X., Perinchief, R., Karrholm, J., Borlin, N., Estok, D. M., & Harris, W. H. 2002, "Experimental assessment of precision and accuracy of radiostereometric analysis for the determination of polyethylene wear in a total hip replacement model", J.Orthop.Res., vol. 20, no. 4, pp. 688-695.
【非特許文献2】Court-Brown 1995, "The epidemiology of tibial fractures", Journal of Bone and Joint Surgery. British Volume, vol. 77, no. 3, p. 417.
【非特許文献3】Grutter 2000, "The epidemiology of diaphyseal fractures of the tibia", Injury, vol. 31 , p. 64.
【非特許文献4】Gustilo, R. B. & Anderson, J. T. 1976, "Prevention of infection in the treatment of one thousand and twenty-five open fractures of long bones: retrospective and prospective analyses", Journal of Bone and Joint Surgery, vol. 58, no. 4, pp. 453-458.
【非特許文献5】Hooper GJ 1991 , "Conservative management or closed nailing for tibial shaft fractures. A randomised prospective trial", Journal of Bone and Joint Surgery. British Volume, vol. 73, no. 1, p. 83.
【非特許文献6】Kanakaris, N. 2007, "The health economics of the treatment of long-bone non-unions", Injury, vol. 38, p. 77.
【非特許文献7】Lacroix, D and Prendergast P.J 2001, !A mechano-regulation model for tissue differentiation during fracture healing: analysis of gap size and loading". Journal of Biomechanics Vol.35, Issue 9, Pages 1163-1171 (September 2002)
【非特許文献8】Littenberg, B. E. N. J., Weinstein, L. P., McCarren, M. A. D. E., Mead, T. H. O. M., Swiontkowski M. F., Rudicel, S. A., & Heck, D. A. V. 1. 1998, "Closed Fractures of the Tibial Shaft. A META-analysis of Three Methods of Treatment", Journal of Bone and Joint Surgery, vol. 80, no. 2, pp. 174-183.
【非特許文献9】Madanat, R., Moritz, N., Larsson, S., & Aro, H. T. 2006, "RSA applications in monitoring of fracture healing in clinical trials", Scand.J.Surg., vol. 95, no. 2, pp. 119-127.
【非特許文献10】Phieffer, L. S. & Goulet, J. A. 2006, "Delayed Unions of the Tibia", Journal of Bone and Joint Surgery, vol. 88, no. 1 , pp. 205-216.
【非特許文献11】Schmidt et al 2003, "Treatment of Closed Tibial Fractures", Journal of Bone and Joint Surgery, vol. 85, no. 2, pp. 352-368.
【非特許文献12】Schneider, E., Michel, M. C, Genge, M., Zuber, K., Ganz, R., & Perren, S. M. 2001 , "Loads acting in an intramedullary nail during fracture healing in the human femur", J.Biomech., vol. 34, no. 7, pp. 849-857.
【非特許文献13】Valstar, E. R., Gill, R., Ryd, L., Flivik, G., Borlin, N., & Karrholm, J. 2005, "Guidelines for standardization of radiostereometry (RSA) of implants", Acta Orthop., vol. 76, no. 4, pp. 563-572.
【発明の概要】
【発明が解決しようとする課題】
【0022】
RSAは、関節置換術の固定および定着を評価し、骨の微細運動を決定するための「最も基準となる」技術であるが、この技術は、整形外科固定デバイスとともに固定された長骨骨折部内の骨片間の運動を測定するためには、考慮されなかった。
【0023】
我々は、骨折の整復の前後で、脛骨などの長骨内に髄内釘によって固定された骨片間の運動を測定するために、RSAが正確におよび精確に使用されうることを確認した。
【課題を解決するための手段】
【0024】
本発明の第1の態様によると、
(a)長手方向軸を有する整形外科インプラントであって、
(i)インプラントの長手方向軸に対して約+45°および/または約-45°で方向づけられた歪ゲージと、
(ii)前記歪ゲージ(複数可)を受けるように構成されたくぼみと、
(iii)少なくとも1つの電源、第1の送信機、第1の受信機、および第1のマイクロプロセッサと電気的に接続された電子構成部品と、
(iv)前記電子構成部品を受けるように構成されたくぼみと、
(v)前記くぼみを密封するための注入材料と、
(vi)前記電子構成部品と電気的に接続された電源と
を備える整形外科インプラント、ならびに
(b)
(i)第2のマイクロプロセッサと、
(ii)前記第2マイクロプロセッサと電気的に接続され、前記電子構成部品の前記第1の受信機へ信号を送信するように構成された第2の送信機と、
(iii)前記第2のマイクロプロセッサと電気的に接続され、前記電子構成部品の前記送信機からデータを受信するように構成された第2の受信機と
を備える制御ユニット
を備える遠隔測定整形外科インプラントシステムが、提供される。
【0025】
整形外科インプラントの長手方向軸に対して約+45°でまたは約-45°で方向づけられたゲージが、トルクおよび3点または4点曲げのいずれかに関連する歪を測定するために最適に配置されているとして確認された。骨折部位に対するゲージの相対的な位置は、トルクの付加の際の歪の測定時には重要でないことがわかった。
【0026】
本発明の実施形態では、整形外科インプラントの長手方向軸に対して約0°または約90°のいずれかで方向づけられたさらなる歪ゲージが、提供される。このような方向づけは、オフセット軸方向荷重に関連する歪を測定するために最適であるとして確認された。しかし、骨折部位に対するゲージの相対的な位置は、重要であることが見出され、骨折部位がゲージに対して遠位にあるとき、歪測定の感度のかなりの減少がある。
【0027】
したがって、骨折のタイプおよび位置に関わらず歪を測定することが可能であるゲージを提供すること、および、医療関係者に、機械的な荷重の方式に関するオプションが使用されることを提供することが、釘の商業用実施形態では望ましい。たとえば、オフセット軸方向圧縮荷重をかけることは、患者が歩行可能であることを必要とする。
【0028】
したがって、商業用の髄内釘が、整形外科インプラントの長手方向軸に対して約+45°および/または約-45°で方向づけられたゲージを備えて提供されうるが、これは、トルクに対する荷重の方式を制限することになり、ある患者では、満足されない、または可能ではないかもしれない。1つのくぼみ内に異なるように方向づけられたゲージを設けることによって、髄内釘が、トルク荷重の代替となるもの、すなわち、オフセット軸方向圧縮または3または4点曲げを与える可能性が、髄内釘の機械的な一体性に損害をもたらさない魅力的な商品としてみられている。
【0029】
釘の商業用の実施形態は、約+45°で方向づけられた歪ゲージおよび約0°で方向づけられた歪ゲージ、または約+45°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージ、または約-45°で方向づけられた歪ゲージおよび約0°で方向づけられた歪ゲージ、または約-45°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージを備えるくぼみを有する。
【0030】
本発明の実施形態では、くぼみは、+45°で方向づけられた歪ゲージ、約-45°で方向づけられた歪ゲージおよび約0°で配置された歪ゲージ、または約+45°で方向づけられた歪ゲージ、約-45°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージ、または約+45°で方向づけられた歪ゲージ、約0°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージ、または約-45°で方向づけられた歪ゲージ、約0°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージを備える。
【0031】
本発明の実施形態では、くぼみは、約+45°で方向づけられた歪ゲージ、約-45°で方向づけられた歪ゲージ、約0°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージを備える。
【0032】
適切な機械的歪ゲージの例には、箔、薄膜、または半導体歪ゲージが含まれる。別法として、センサは、機械的な荷重を直接測定するために使用されるロードセルであってよい。
【0033】
本発明の実施形態では、蓋が、その中の回路に対する電気的遮蔽を与えるために、くぼみにオプションで付随されている。
【0034】
本発明の第2の態様によると、
遠隔測定整形外科インプラントであって、
(i)インプラントの長手方向軸に対して約+45°および/または-45°で方向づけられた歪ゲージと、
(ii)前記歪ゲージ(複数可)を受けるように構成されたくぼみと、
(iii)少なくとも1つの電源、第1の送信機、第1の受信機、および第1のマイクロプロセッサと電気的に接続された電子構成部品と、
(iv)前記電子構成部品を受けるように構成されたくぼみと、
(v)前記くぼみを密封するための注入材料と、
(vi)前記電子構成部品と電気的に接続された電源と
を備える、遠隔測定整形外科インプラントが提供される。
【0035】
本発明の第2の態様の実施形態では、少なくとも1つのさらなる歪ゲージが、インプラントの長手方向軸に対して約0°でおよび/または約90°で方向づけられている。
【0036】
本発明の実施形態では、蓋が、その中の回路のための電気的遮蔽を与えるために、くぼみにオプションで付随されている。
【0037】
本発明の第1および第2の態様による実施形態では、整形外科インプラントは、髄内釘である。
【0038】
遠隔測定髄内釘が、その全体において参照により本明細書に組み込まれるWO2007/025191で、前に開示されている。釘の実装のための適切な材料および方法論、および通信で使用するため、および釘から受けた情報を格納するために適切な周辺部品の例が、WO2007/025191に開示されている。
【0039】
本発明の実施形態では、遠隔測定整形外科インプラント、より具体的には、髄内釘が、歪ゲージを受けるための単一のくぼみを備える。
【0040】
本発明の特定の実施形態では、この単一のくぼみが、釘の近位の部分に配置されている。
【0041】
本発明の特定の実施形態では、この単一のくぼみが、釘の長手方向軸に対して、約+45°および約0°または約-45°および約0°で方向づけられた歪ゲージを備える、または歪ゲージから成る。
【0042】
本発明の代替となる実施形態では、歪ゲージがその中に設けられているくぼみが、髄内釘の長手方向軸の長さに沿ったほぼ中央に配置されている。
【0043】
本発明の代替となる実施形態では、歪ゲージくぼみが、長手方向軸の長さの沿ったほぼ中央に配置され、釘のテーパされた近位の領域内へ延びている。髄内釘のいくつかのデザインでは近位の領域の壁厚はわずかに厚く、歪ゲージおよびそれに付随する電子構成部品を保持するくぼみを設けることは、くぼみが釘の他の領域内に配置された場合よりも、釘の機械的一体性に対する影響は低い。
【0044】
本発明の実施形態では、くぼみは、ポケットが釘の長手方向軸に沿って延び、その幅よりも大きい長さを有するような寸法にされている。
【0045】
本発明の実施形態では、くぼみは、約10から150mmの間、または約10から130mmの間、または約100mmから150mmの間、または約100mmから140mmの間、または約100mmから130mmの間、または約120mmから140mmの間の長さを有する。
【0046】
本発明の実施形態では、くぼみは、約130mmの長さを有する。
【0047】
くぼみは、その長さに沿った中間点を有する。
【0048】
本発明の実施形態では、くぼみの長さに沿った中間点は、髄内釘の長手方向に沿ったほぼ中間に位置される。
【0049】
本発明の実施形態では、くぼみの長さに沿った中間点は、釘の長手方向軸の中間点から、ポケットの長さまで偏移している。たとえば、くぼみの長さは、第1の端部および第2の端部を有するとして画定され、これらの端部のうちのいずれかが、釘の長手方向軸に沿った中間点に位置されうる。
【0050】
髄内釘の一例は、TRIGEN META NAIL(登録商標)(Smith & Nephew)である。TRIGEN META NAIL(登録商標)の設計制約のため、くぼみは、釘の近位の領域に位置されている。
【0051】
本発明の実施形態では、髄内釘は、Table 1(表1、表2)に開示されている8または9ポケット釘のデザインを備える、または構成される。
【0052】
本発明の実施形態では、髄内釘は、長骨、たとえば、脛骨または大腿骨の骨折の修復に使用される。
【0053】
代替となる実施形態は、歪ゲージおよびその他の電子構成部品を、プレート、骨ねじ、カニューレねじ、ピン、ロッド、ステープル、およびケーブルなどの他の埋込み可能な外傷製品内に組み込むことである。また、本明細書で説明されている計測は、全膝置換(TKR)および股関節全置換(THR)、歯科用インプラント、および頭蓋顎顔面インプラントなどの関節置換術インプラントへ拡張可能である。
【0054】
本発明の第3の態様によると、本発明の第1の態様によるシステム内での、本発明の第2の態様による遠隔測定整形外科インプラントの使用が提供される。
【0055】
固定および外科手術は骨の治癒を容易にするが、骨折の治癒は、センサおよび生体遠隔測定システムを使用してインプラントと周囲の骨の間の荷重分配の現場での変化を連続的に監視することを通じて達成されうる、十分な生理学的な治癒をまだ必要とする。骨の質量およびアーキテクチャは、それらへ付加される機械的な荷重によって影響されることが知られている。内部の整形外科固定システムの不十分な管理によって生じる応力遮蔽による適切な荷重の欠如で、骨の質量が減少し、骨折の治癒の妥協が結果として生じる。遠隔測定整形外科インプラントの主な機能は、外科的配置の直後の荷重を担持することである。たとえば、遠隔測定整形外科釘は、髄内管内で外科的配置の直後の荷重を担持する。骨折治癒の進行とともに、インプラントと骨の間の荷重分配が変化する。このことは、骨折の位置に関わらず整形外科インプラント内に最適に位置されている、歪ゲージを使用することによって追尾されうる。このことは、釘の単一のデザインを、ある範囲の骨折タイプおよび骨折位置に対して使用することが可能であるという利点を有する。歪ゲージは、X線から得ることができないすべての空間的な成分で治癒骨の荷重成分を、連続的または断続的のいずれかで監視することによって、骨折の場合に癒合の進展を監視するために使用されうる。癒合が生じるまでの周期的なフォローアップが、骨片の相対的な運動が徐々に減少することを示すグラフを与える。
【0056】
各骨折患者は、彼または彼女の治癒曲線を生成する。しかし、治癒曲線の一般的な形状は、骨折が癒合状態、癒合遅延状態または非癒合状態のいずれか進展するかどうかを示している。患者から生成される治癒曲線は、骨折のタイプおよび位置、健康ステータス(基礎疾患)、年齢、活動量、リハビリテーションおよび体重負荷に至った時点を含むいくつかの要素に依存する。
【0057】
本発明の第4の態様によると、
整形外科インプラントに付加される機械的な荷重を測定する方法であって、
(i)所望の機械的荷重を付加するために適した位置に、本発明の第2の態様による遠隔測定整形外科インプラントを有する対象を配置する段階と、
(ii)インプラントに機械的な荷重を付加する段階と、
(iii)インプラント内に設けられた少なくとも1つの歪ゲージに問合せする段階と
を含む方法が提供される。
【0058】
歪ゲージによって測定された荷重が次に、(i)癒合状態へ進展する骨折(ii)遅延した非癒合である骨折および(iii)非癒合状態を維持する骨折についての、計装化した釘と周囲の骨の間の荷重分布を示す、仮想の荷重対治癒時間曲線と比較されうる。骨折治癒は、インプラント荷重の減少を結果として生じさせるが、釘の残留荷重は顕著であり、患者活動で増加することが予想される。インプラント除去の後、骨の荷重が50%まで増加することが示唆された。隣接する骨内で測定される荷重は、手足を通じて及ぼされた荷重からインプラント荷重を減算することによって決定することも可能であり、これは、力プレートまたはバランスのいずれかを使用して決定される。臨床医はまた、手足全体の機能に対する基準測定値を提供するために、対側の手足を通って作用する荷重を測定しうる。
【0059】
外科医が、インプラント上の歪がある時間にわたって減少したことを観察した場合、このことは、周囲の硬組織(たとえば、仮骨)が荷重のうちのいくらかを受けている、したがって骨折が治癒していることを意味している。しかし、インプラント上の歪が、時間とともに変化せず、患者が、病院またはその他の医療施設から退院したときとほぼ同じレベルである場合、このことは、周囲の硬組織が、荷重に耐えておらず、したがって骨折が治癒していないことを意味している。
【0060】
本発明の第4の態様による方法の実施形態では、
ねじり力の付加の際に埋め込まれた遠隔測定整形外科インプラントへの機械的な荷重を測定する方法であって、
(i)立脚位または仰臥位のいずれかに、遠隔測定整形外科インプラントを有する対象を配置する段階と、
(ii)遠隔測定整形外科インプラント上にねじり力を付加する段階と、
(iii)約+45°および/または約-45°方向で歪ゲージを問合せする段階と
を含む方法が提供される。
【0061】
本発明の第4の態様による方法の実施形態では、
オフセット軸方向圧縮力を付加する際の整形外科インプラントへの機械的な荷重を測定する方法であって、
(i)立脚位で遠隔測定整形外科インプラントを有する対象を配置する段階と、
(ii)遠隔測定整形外科インプラントにオフセット軸方向圧縮力を付加する段階と、
(iii)約0°および/または約90°の方向で歪ゲージを問合せする段階と
を含む方法が提供される。
【0062】
本発明の第4の態様による方法の実施形態では、
3または4点曲げ力の付加の際の整形外科インプラントへの機械的な荷重を測定する方法であって、
(i)立脚位または仰臥位で遠隔測定整形外科インプラントを有する対象を配置する段階と、
(ii)遠隔測定整形外科インプラント上に3または4点曲げ力を付加する段階と、
(iii)約+45°、約-45°、約0°および/または約90°方向の歪ゲージに問合せする段階と
を含む方法が提供される。
【0063】
本発明の第5の態様によると、
対象内の骨折治癒を監視する方法であって、
(i)所望の機械的な荷重を付加するために適した位置に、本発明の第2の態様による遠隔測定整形外科インプラントを有する対象を配置する段階と、
(ii)機械的な荷重を付加する段階と、
(iii)インプラント内に配置された少なくとも1つの歪ゲージに問合せする段階と、
(iv)歪を基準骨折治癒曲線と相関させる段階と
を含む方法が提供される。
【0064】
本発明の第5の態様による実施形態では、機械的な荷重が、オフセット軸方向圧縮、トルク、3点曲げまたは4点曲げから成る群から選択され、対象が、立脚位または仰臥位状態にオプションで配置される。
【0065】
髄内釘が、骨折仮骨の剛性の変化を検知し、患者の治癒ステータスを決定するために使用されうる。髄内釘は、仮骨の剛性の少なくとも4.1Nm/°の変化を検知することが可能である。したがって、釘が、仮骨の剛性測定に基づいて脛骨の骨折固定の1か月内の骨折の癒合遅延または非癒合を検知することが可能であることが考えられる。
【0066】
本発明の第6の態様によると、整形外科固定デバイスとともに固定されている骨折部内での骨片間運動の測定のために放射線体積測定解析を使用することが、提供される。
【0067】
本発明の実施形態では、RSAが、無傷、整復された骨折部、整復されていない骨折部を区別するために使用されうる。
【0068】
本発明の第7の態様によると、無傷、整復された骨折部、整復されていない骨折部を区別するためのRSAの使用が提供される。
【0069】
本発明の第8の態様によると、
骨折部内の骨片間運動を計測する方法であって、骨折部が骨折固定デバイスによって固定され、前記方法が、
i)複数の放射線不透過マーカーを骨折した骨および/または骨折固定デバイスに付随させる段階、
ii)複数の放射線不透過マーカーを備える補正ケージを骨折部位に関連する既知の位置に配置する段階と、
iii)骨折部位および補正ケージが、少なくとも2つの角度から同時にX線照射される、骨折部位の放射線写真検査を行う段階と、
iv)補正ケージ内の放射線不透過マーカーの位置に基づいて3次元座標系を生成する段階と、
v)骨折した骨および/または骨折固定デバイスに関連する放射線不透過マーカーの3次元位置を3次元座標系と比較する段階と
を含む方法が提供される。
【0070】
本発明の実施形態では、骨折が、たとえば、脛骨または大腿骨などの長骨のものである。
【0071】
整形外科デバイスは、たとえば、髄内釘、骨プレートまたはイリザロフフレームなどの外部固定具であってよい。
【0072】
本発明の特定の実施形態では、RSAが髄内釘によって固定された脛骨幹部骨折部内の骨片間運動を正確かつ精確に監視するために使用される。
【0073】
適切な放射線不透過マーカーの例は、タンタルビードであるが、RSAで使用するために適した代替となる放射線不透過マーカーが考えられる。
【0074】
別法として、電子構成部品に付随するはんだ接合部が、骨片間の骨の運動を監視するための基準点として使用されうる。
【0075】
放射線不透過マーカーが、好ましくは、近位のおよび遠位の骨折セグメントに付随し、それによって剛体セグメントを規定する。
【0076】
少なくとも3つの放射線不透過マーカーが、近位のおよび遠位の骨折セグメントに付随している。
【0077】
放射線不透過マーカーが、好ましくは、分散したパターンで、骨および/またはインプラントに付随している。
【0078】
整形外科デバイスが、たとえば、髄内釘、骨プレートまたはイリザロフフレームなどの外部固定具から選択されてよい。
【0079】
RSAは、(ねじの緩みまたは増強を通じて)インプラントの位置的な変化およびインプラントに作用する力の変動(誘導変位)の結果として、骨の微細運動を測定することが可能であり、仮骨剛性を間接的に測定することも可能である。このようにして、RSAが、インプラント固定および骨折の整復の両方を調査するために術後に使用されうる。
【0080】
RSAが、外傷固定のための術中ツールとして使用されうることが、さらに考えられる。この技術の使用が、外科医が、インプラントの位置異常または配向異常を修正すること、および骨折が十分に整復されることを確実にすることを可能にする。
【0081】
本発明のさらなる実施形態では、本発明の1つまたは複数の態様による発明が、組み合わされることが可能であると考えられる。たとえば、骨折が、適切に計装化された髄内釘によって固定され、骨折治癒の遠隔測定および放射線体積測定評価の両方を可能にする。有利には、使用される計装化された髄内釘および髄内釘を備えるシステムは、本発明の第1のおよび第2の態様に従って定義されるようである。
【0082】
本発明の第9の態様によると、骨折治癒、たとえば、動物モデルを含む生体力学モデルの骨折治癒の生体外分析において、本発明の第1の態様によるシステム、または本発明の第2の態様による遠隔測定整形外科インプラントの使用が提供される。
【0083】
本発明の第10の態様によると、添付の実施例、表および図を参照して本明細書で実質上説明されるような方法、デバイスおよびシステムが提供される。
【0084】
本発明のさらなる特徴、態様および利点、ならびに本発明のさまざまな実施形態の構造および動作が、添付の図面を参照して以下で詳細に説明される。
【0085】
本明細書内に組み込まれ、その一部を形成する添付の図面は、本発明の実施形態を、本発明の原理を説明する働きをする説明とともに示している。
【図面の簡単な説明】
【0086】
【図1】骨折の病因学の図である。
【図2】反時計方向での、CCスパイラルポケット配置の図である。
【図3】TRIGEN META(登録商標)釘上のポケット位置の図である。
【図4】(i)オフセット軸方向圧縮(0〜1000N)、および(ii)トルク(±2.5N.m)の結果としての歪測定のための荷重リグの図である。
【図5】3点および4点曲げ(0〜1000N)の結果としての歪測定のための荷重リグの図である。
【図6】荷重リグ内でのX線チューブの位置決めの図である。
【図7】y軸回転測定のために使用される高精度回転台の図である。
【図8】RSA補正ケージの前に配置された3点荷重リグの図である。
【図9】補強されたポリエチレンを使用した仮骨シミュレーションの図である。
【図10】軸方向荷重に関する歪値の回帰図である。
【図11】トルクに関する歪値の回帰図である。
【図12】軸方向力およびトルクに関する主歪の大きさの図である。
【図13】軸方向力およびトルクに関する主歪方向の図である。
【図14】軸方向力およびトルクに関する主歪の大きさの図である。
【図15】軸方向力およびトルクに関する主歪方向の図である。
【図16】無傷の骨内の近位のセグメントに対する遠位のセグメントのY軸並進運動(微細運動)を示す図である。
【図17】無傷の骨内の近位のセグメントに対する遠位のセグメントのY軸回転を示す図である。
【図18】AO43-A3骨折部内の近位のセグメントに対する遠位のセグメントのY軸並進運動(微細運動)を示す図である。
【図19】AO43-A3骨折部内の近位のセグメントに対する遠位のセグメントのY軸回転を示す図である。
【図20】AO42-C2骨折部内の近位のセグメントに対する遠位のセグメントのY軸並進運動(微細運動)を示す図である。
【図21】AO42-C2骨折部内の近位のセグメントに対する遠位のセグメントのY軸回転を示す図である。
【図22】分節骨折の2つの脛骨の懸下点の間の18cmの中間に付加された前記荷重モーメントとの関係を示す、歪ゲージポケット数に対してプロットされた感度(マイクロストレイン/kg)の図である。
【図23】歪ポケットに対するトレース感度の図である。
【図24】ポケット6に重なるAO42-A3骨折を示す図である。
【図25】ポケット7〜8に重なるAO43-A1骨折を示す図である。
【図26】近位のおよび遠位の骨折線がポケット4および6にそれぞれ重なるポケット4、5および6に重なるAO42-C2骨折を示す図である。
【図27a】荷重増加によるZ回転の増加を示すRSAトレース図である。
【図27b】荷重増加によるZ回転の増加を示すRSAトレース図である。
【図27c】荷重増加によるZ回転の増加を示すRSAトレース図である。
【図27d】荷重増加によるZ回転の増加を示すRSAトレース図である。
【図28】釘-骨複合物の剛性を増分的に増加した、歪ポケットの感度のRSAトレース図である。
【図29】4および8ループ強化ポリエチレンテープ「仮骨」に対する荷重でのZ平面内の回転のRSAトレース図である。
【図30】人工の仮骨形成-円周上に付加の図である。
【図31】人工の仮骨形成-セグメント付加の図である。
【図32】骨折モデル:42-A2-A0;ポケット/ゲージ:4A;5B。立脚位-軸から外れた圧縮荷重の図である。
【図33】骨折モデル:42-A2-A0;ポケット/ゲージ:1B;9B。立脚位-軸から外れた圧縮荷重の図である。
【図34】骨折モデル:42-A2-A0;ポケット/ゲージ:1B;9B。立脚位-4点曲げの図である。
【図35】骨折モデル:42-A2-A0;ポケット/ゲージ:4B;5C。立脚位-4点曲げの図である。
【図36】骨折モデル:42-A2-A0;ポケット/ゲージ:1A;4A;5A;9A。立脚位:トルク荷重の図である。
【図37】骨折モデル:42-A2-A0;ポケット/ゲージ:1A;4A;5A;9A。仰臥位:トルク荷重の図である。
【図38】骨折モデル:42-A2-A0;ポケット/ゲージ:1B;4B;5B;9B。仰臥位:トルク荷重の図である。
【発明を実施するための形態】
【0087】
「スマートインプラント」は、制御された有用な方式で、その環境を感知し、どんな動作が必要とされるかを判定するための知識を付加し、何かを変更するために感知情報に作用することができるインプラントである。スマートインプラント技術の1つの魅力的な適用例は、整形外科インプラントに対する荷重を測定することである。たとえば、髄内釘は、3つのタイプの荷重、曲げ、ねじり、および圧縮を受ける。これらの荷重は、整形外科インプラント上に装着された、一連の歪ゲージのセンサ出力を測定することによって間接的に測定されうる。髄内釘の場合、釘の外部表面上に装着され、直径上に並べられた歪ゲージが、引張および圧縮力をそれぞれ受ける。通常、センサから測定される歪は、インプラントが、圧縮荷重よりも曲げ荷重を受けるとき、より高くなる。
【0088】
歪ゲージの基本的なパラメータは、WO2007/025191で定義されているようなゲージファクタGとして定量的に表現される、歪に対するその感度である。
【0089】
髄内釘などの埋込み可能な医療デバイスの中にセンサおよびその他の電子構成部品を組み込むことは、受動的な荷重支持デバイスから、患者活動およびコンプライアンスを記録および監視する能力を有するスマート「インテリジェント」システムへ、その主要な機能を変更する。
【0090】
材料および方法
Sawbone
第4世代の複合Sawboneが、Sawbones(登録商標) EuropeAB、Malmo、Swedenから得られた。これは、左の脛骨の代表物である。
【0091】
骨折パターンの病因学
図1に示すように、
(i)整復されていない中軸粉砕分節骨折(42-C2);
(ii)整復されていない遠位の関節外粉砕骨折(43-A3)
(iii)整復された単純らせん状骨折(42-A1)
(iv)整復された単純横骨折(42-A3)
【0092】
髄内釘
長さ38cm(外直径10mm)の脛骨のIM TRIGEN META NAIL(登録商標)(Smith & Nephew, Inc)。
【0093】
計装化された髄内釘
標準使用の長さ38cm、外直径10mmの脛骨IM TRIGEN META NAIL(登録商標)(Smith & Nephew, Inc)が、使用された。長さ15mm×幅6mmの寸法、34mmピッチで、釘の表面内にくぼみが刻まれた。ポケットが、釘の軸を下向きに走る、反時計方向のらせん状パターンを追従した。
【0094】
【表1】
【0095】
【表2】
【0096】
3個の前方ポケット(1、4、7)、2個の内側ポケット(3、6)および3個外側のポケット(2、5、8)がある。各ポケットは、3つのゲージからカニューレ管を通って4本のワイヤを通すために、その底部に穴を有する。ワイヤが、管の内部を、釘の遠位の端部へ下向きに走っている。ワイヤは、遠位のねじ穴の最も近位の部分を通って出て、2個の代替となるねじ穴を避けるために機械加工された斜めの通路に沿って、釘の端部の下方へ走っている。3個の箔歪ゲージ(N3K-XX-S022H-50C/DP)、Vishay Ltd、が、図2および3のように、MBond-600接着剤を使用して各ポケットの底部に接着されている。ゲージは、長手方向軸に対して方向づけられている。ゲージAは45°で、ゲージBは一直線上に、ゲージCは-45°で、それぞれ方向づけられている。0°ゲージは、たわみおよび延びを検知し、一方、+45°および-45°ゲージは、横曲げおよびねじりを検知する。ゲージは、MBond-43Bコーティングで一致して保護されている。ワイヤの500mmの自由長が、増幅器への取付けのために準備された。
【0097】
ゲージは、各ポケット内の単一のリターンワイヤによってクォータブリッジとして接続される。ワイヤは、リーマ加工された管を容易に通過することができる、8mm直径コネクタに取り付けられる。これらは、Labview v8(登録商標)へデータを送信する増幅器に取り付けられている。ロードセル内の8個のゲージからのデータもまた、同じシステムを通じて同時に記録される。Labview v8(登録商標)が、5秒のウィンドウで8個の歪ゲージのそれぞれに対して、512個の測定値を収集する。平均値が、データ解析のために使用される。歪値は、6.8の係数によって除算することによって、マイクロストレインに変換されうる。接地されたスズ箔によってすべてのワイヤをカバーすることによって、および荷重リグなどの構成要素を接地することによって、電気的ノイズが減少される。また、ラップトップへの主電源を除去することが、有用であることも発見された。
【0098】
遠隔測定方法論
1. 軸方向およびねじり荷重下での計装化された髄内釘内の歪の測定
1.1 骨折パターン
2つの骨折パターン、(i)42-C2および(ii)43-A3が試験された。
【0099】
中軸42-C2骨折に対して、1対の横方向の切込みが、脛骨の近位の端部から24cmで、5mmの間をあけて入れられた。別の1対の切込みが、さらに60mm離れて入れられる必要があった。2つの5mm骨片を取り除くことによって、3つのセグメントが作成され、中央セグメントが釘によって固定され、遠位のおよび近位のセグメントがクロスねじによって固定された。骨折隙間が、粉砕骨折の多数の骨片を表している。骨折部は、計装化された髄内釘の遠位の端部のポケット6および近位の端部のポケット4と整列された。
【0100】
遠位の骨折部が、近位の、遠位のねじ穴の上方30mmおよび40mmで骨を横に切ることによって作成された。作成されたセグメントが、除去された。骨折部は、計装化された髄内釘のポケット8と交差した。
【0101】
髄内釘が、骨の端部へ延びる管によって、12mmの直径へ2mmだけオーバーリーマ加工されたSawbones(登録商標)内に挿入された。
【0102】
1.2荷重リグ
釘のための荷重リグが、図4に示すように、調節可能な上部プラットホームを有するアルミニウムフレームを使用して構成された。ロードセルが下部表面上に配置され、これが次に、釘の遠位の端部を収容するために、反トルクジグによって装着される。ワイヤが出るための穴がここに位置しているため、釘の下部表面がアクセス可能であることが重要である。
【0103】
使用されるロードセルは、曲げ、内部および外部トルク、および軸方向荷重を測定するように設計されている。
【0104】
Sawbones(登録商標)が、両端に、2個のボールを介して装着された。解剖学的な中線に対して内側の9mmおよび23mmのオフセットが、それぞれ、遠位および近位の端部での荷重付加のために使用される。このオフセットは、脛骨の動作の機械的な線をより代表している(Hutsonら、1995)。近位の荷重点が、所望の位置(中線に対して内側の23mm)をマークすることによって構築され、次にこの領域を覆ってワッシャが配置される。金属ワッシャが、Araldite接着剤を使用して固定される。金属ワッシャ内の中央穴は、近位のボールを収容し、荷重伝達点を形成することができる。適切な大きさにされた遠位の小さい金属キャップが、骨内に作成された2個の小さい穴に嵌合することによって、骨上に嵌合される。このキャップは、ワイヤの出口のための骨のリーマ加工された管と重なる穴を有し、また、中線に対して内側の9mmに遠位のボールを収容するための小さいソケットを有する。ボールは、脛骨の遠位の端部を定位置に固定する反トルクジグによって、ロードセルの上部と連通している。
【0105】
1.3軸方向荷重付加
軸方向荷重付加が、上部プラットホームに固定された調節可能なねじを介して行われた。ねじが、脛骨上の荷重ワッシャと位置合わせして配置された。ねじが、ばねと接続された。ねじは、ボールと連通している。ばねの周囲に配置された金属キャップが、その運動をガイドする一方で、最小の拘束を提供する。キャップは、ばねが圧縮下にあるとき、ボールが上へすべることができるよう十分大きい。
【0106】
1.4トルク付加
トルク付加は、プーリーシステムを介して行われた。100mmクロスバーが、近位の骨の端部を水平方向に通過し内外側(ML)方向に走っていた。少なくとも10kgの重りに耐えることができる1対のワイヤが、バーの端部に取り付けられており、同じ水平方向平面内でプーリーの上を通過していた。トルクが、ワイヤの端部に重りを吊るすことによって付加された。他方の側へワイヤを揺動させることによって、反対方向へのトルクの付加が可能になった。
【0107】
内踝の両側の定位置に保持された1組のプレートが、反トルクを付加するための方法を提供した。クロスバーが、踝を通って前後(AP)方向に挿入され、両方のプレートを通って走り、プレートが、ねじりを防止するのに十分締まることをゆるし、プレートが骨を脱臼させることを防止する。
【0108】
5kgの最大値まで500gの増分で、時計方向および反時計方向の両方で、5Nmまでのトルクが付加された。
【0109】
1.5ステップバイステップ方法
1釘を挿入する
2荷重リグ内に骨釘構造を配置する
3ワイヤを増幅器と接続し、Labview v8の運転を開始する
4荷重を開始する。トルク測定が、0、250、500、750および1000Nの軸方向荷重で行われる。時計方向および反時計方向で、500g重りの増加する増分が、5kgまで追加される。軸方向荷重が、0から1000Nまで、50Nの増分で増加される。構造をアンロードするとき、軸方向測定のみが必要とされる。各荷重設定で、新しいデータの組が、収集される必要がある。
5骨を取り除き、釘を取り出す。
6各荷重サイクルを繰り返す。
【0110】
1.6データ解析
データ解析が、各荷重付加に対する平均歪値の計算を介して行われ、次に2つの変数で重回帰分析が行われた。これらの2つの荷重のタイプに応答してさまざまなゲージでの歪のパターンを観察するために、回帰分析が、軸方向荷重およびトルクに関して行われた。
【0111】
2. 3点曲げ下での計装化された髄内釘の歪の測定
2.1骨折パターン
4つの骨折パターンが試験された。(i)整復されていない中軸粉砕分節骨折(42-C2)、(ii)整復されていない遠位の関節外粉砕骨折(43-A3)、(iii)整復された単純横骨折(42-A3)および(iv)整復された単純らせん状骨折(42-A1)。
【0112】
2.3荷重リグ
荷重リグが、図5に示されている。
【0113】
釘骨複合物が、2つのテストチューブクランプに取り付けられた2本の糸を用いて水平方向に懸下される。骨上に鉛直方向に固定されたスピリットレベルおよびドリルビットを使用して、釘が両方完全に水平方向にあること、および重要なことには、釘の前方表面が上を向き、水平方向に対して垂直であることに注意が払われる。この配置は、0°のインライン前方ポケットゲージが、力の付加方向に対して垂直であることを確実とし、このようにして釘の長手方向の圧縮および延びを検知するように最適に配置されるようになる。このジグは、X、YおよびZ平面内に付加される荷重による、釘骨複合物の運動を可能にする。これは、2つの骨の端部が、堅固に固定されていないためである。近位では、懸下点が、腕骨内顆および脛骨外顆内の2つのねじから成る。遠位では、糸が、突出した遠位のロッキングねじに取り付けられている。
【0114】
釘-骨複合物に歪を付加するために、重りが、糸およびフックを用いて、水平方向に懸下された骨から懸下されている。重りは、釘の長さに沿った5つの異なる位置に配置される。骨がそこから懸下されている近位の脛骨の顆ねじが、ゼロ基準値である。この基準値から、センチメートル単位での重り懸下位置は、9、13.5、18、22.5、および27である。この実験設定は、膝関節で側副靭帯および十字靭帯によって脛骨に与えられる回転自由度を模擬している。これらの位置のそれぞれで、0kgから始まり1kg増分で、最大10kgでの重りが加えられる。Wehner 2009に基づいた歩行サイクル中、10kgは、脛骨の受ける生理学的荷重を代表するものである。このようにして、5つの位置のそれぞれで、11の歪値対荷重測定が、行われる。4つの骨折パターン55(11×5)のそれぞれに対して、歪値対荷重測定が、行われる。
【0115】
測定の再現性を評価するために、荷重は、中央位置(近位の取付点から18cm)で、0〜10kgまで1kg増分で付加された。歪値対荷重測定が行われた。この同じプロセスが3回繰り返された。
【0116】
B.RSA方法論
3.軸方向およびねじり荷重下での脛骨の骨折に固定された髄内釘内の骨片間運動の測定
精度および精密度実験
3.1X線エネルギーレベル設定
Sawbones(登録商標)に荷重を与えるリグが、ほぼ放射線透過性である金属であるアルミニウムのバーから構成された(図4参照)。定位置の荷重リグで行われるRSA撮影が、90kVで行われた。
【0117】
3.2放射線写真技術
RSA設定は、3D座標系を生成するために使用されるタンタルビードを含む補正ケージ(ケージ43、RSA BioMedical、Umea、Sweden)から成る。X線は、2 AGFA CRMD4.0 General Cassettes(350mm×420mm)上で撮影され、AGFAフォーマットで処理され、次にDICOM Linkへ送信される。画像が、UmRSA Digital Measure6.0へインポートされ、ここで基準および骨マーカーがラベル付けされる。骨マーカーは常時、近位のセグメントに対して201、202...のように、遠位のセグメントに対して301、302...で番号が付けられる。運動学に関連するデータが、UmRSA解析6.0から得られる(RSA BioMedical、Umea、Sweden)。運動学データは、「セグメント運動」法(セグメント20に対するセグメント30の変位)を使用して、近位の骨片に対するSawbones(登録商標)脛骨の遠位の骨片の定着を示している。
【0118】
3.3タンタルビード
0.8mmの直径を有する球形のタンタルビードが(RSA BioMedical、Umea、Sweden)、骨マーカーとして使用される。
【0119】
3.4線形変位に対する精度および精密度プロトコル
1cmの遠位の第3の骨折隙間を有するSawbones(登録商標)が、x、yおよびz軸での線形変位に対するRSAの精度および精密度を決定するために使用された。8個のタンタルビードが、ドリルおよびばね付加されたピストンを使用して、切骨部に最も近い領域内のSawbones(登録商標)の近位および遠位の部分に挿入された(RSA BioMedical、Umea、Sweden)。図6に示すように、X線チューブが、下を向いたセットの上方に配置された。補正ケージが、放射線透過性のテーブルの下に配置され、その上に仮想モデルが配置された。
【0120】
Sawbones(登録商標)の近位のセグメントが、x、yおよびz軸での並進運動を測定するために、2本のプラスチック釘を介して高精密度並進運動台(M-460A-xyz、Newport、Irvine、CA、USA)に取り付けられた。3個のVernierマイクロメータ(モデルSM13、Newport、Irvine、CA、USA)が、並進運動台に取り付けられた。Newport companyによると、この設定は、並進運動に対して1μmの精度を有する。並進運動台が、ねじによってPlexiglasベースに取り付けられた。Sawbones(登録商標)脛骨の遠位のセグメントが、プラスチック釘によってベースに固定された。
【0121】
人工脛骨の近位のセグメントが、100μmの増分で遠位のセグメントに向かって移動され、同時フィルムペアが、各点で撮影された。X線ビームが、仮想モデル内で骨折と直接交差した。近位のセグメントが遠位のセグメントに1mm近づくまで、これが10回繰り返された。y軸変位の間に、および最後にz平面内の運動のために、同一のプロトコルが測定を行うために追従された。また5回の放射線ペアが、ゼロ変位で撮影された。あと5回、行われた。各回で、マイクロメータは、0μmから10μmへ次に0μmへ戻るように移動した。
【0122】
3.5y回転および角運動(z軸回転)に対する精度および精密度プロトコル
y軸回転での精度および精密度を測定するために、高い精密度の回転台が使用された。(M-UTR-80、Newport、Irvine、CA、USA)これは、木製の底板に螺合され、木製のブロックおよびプラスチック釘を介してSawbones(登録商標)の遠位のセグメントと接続された(図7;上側画像)。回転台の精度は1/60°であった。遠位のセグメントは時計方向に5°、次に反時計方向に5°移動され、回転運動の1°ごとにX線が撮影された。人工の脛骨の近位のセグメントは、2本のプラスチック釘によって木製の背板に堅固に取り付けられていた。
【0123】
角運動の測定のために、同じ並進運動台(図7;下側画像)が、前と同様に使用されるが、今回は、1個のVernierマイクロメータのみによる。これは、木製の背板に螺合され、木製のブロックに取り付けられ、Sawbones(登録商標)の両方のセグメント上に押圧された。骨折した脛骨の角運動を模擬するために、Sawbones(登録商標)の両セグメントが、プラスチック釘を使用して、z軸回転を可能にして、背板上に装着された。マイクロメータが、xの負方向に5mm、近位のセグメントの遠位の端部および遠位のセグメントの近位の端部を押圧した。これは、500μmの増分で5mmまで行われ、セグメントをy軸とより整列させた。このことは、内外方向に付加された荷重の結果生じる角運動(z軸回転)を測定するとき、RSAの精度および精密度を確立するために行われる。
【0124】
3.6精度および精密度計算
精度および精密度が、全線形変位、ならびに3つの平面の線形運動のそれぞれに対して決定される。類似の測定が、角運動およびy軸回転のために行われる。
【0125】
精度、測定値の真の基準値への近さ(Bragdonら、2002)が、線形回帰解析を使用し、測定されたRSA変位結果値を真のマイクロメータ値と比較し、95%予測区間を計算し、SPSS(version 14.0 for Windows(登録商標)、Chicago、IL)を使用することによって決定されうる。予測区間に対する最大および最小境界が決定され、区間の平均が精度として示されることが可能である(Onstenら、2001)。
【0126】
精密度は、繰り返した場合に同じ結果が得られる可能性である(Valstarら、2005)。この研究での精密度はp=±(y)(SE)として計算された(Altman、2000)。yの値が、95%信頼度レベルに対して決定され、自由度=誤差値の数-1である。(Bragdonら、2002)。真の値を取得し、測定値を引くことによって誤差値が規定される。これは、それから標準偏差および標準誤差が決定されうる全体平均誤差を与える。
【0127】
荷重実験
3.7軸方向およびねじり荷重
Sawbones(登録商標)の中心から近位の端部で23mm、および遠位の端部で9mmだけ内側にオフセットされて1000Nの軸方向荷重が、歩行サイクルの単一の脚間隔でピーク荷重の間脛骨が受ける合力を模倣した(Hutsonら、1995)。
【0128】
5Nmのトルクが、付加された。
【0129】
3.9荷重プロトコル
骨A
無傷のSawbones(登録商標)が、荷重リグ内に配置された。この特定のSawbones(登録商標)は、12mmまでリーマ加工されるが、髄内釘が挿入され、前にそれから約15回除去された。タンタルビードが、ドリルおよびばね付加されたピストンを使用して埋め込まれた(RSA BioMedical、Umea、Sweden)。しかし、Sawbones(登録商標)は非常に硬いため、3個のマーカーだけが遠位のセグメント内に作成された。人工の脛骨に荷重を付加し、どのくらいの荷重を骨が得たかを識別することが可能であった。増幅器へ通過するSawbones(登録商標)の遠位の端部の下に配置された、リグ内のロードセルからの情報および出力が、LabVIEW v8を使用して解釈された。軸方向荷重が、250Nの増分で1000Nまで付加された。各レベルで、同時フィルムペアが、軸方向荷重のみの下の骨で撮影された。+5Nmのトルクで軸方向に荷重をかけ、最後に-5Nmのトルクで軸方向荷重をかけた。定位置に全部で4本のロッキングねじを有する同じ釘を使用して手順が繰り返された。
【0130】
骨B
無傷のSawbones(登録商標)が、髄内釘を挿入されて、荷重リグ内に配置された。このSawbones(登録商標)は、12mmまでリーマ加工され、髄内釘が挿入されて、前に1回除去される。タンタルビードが、Araldite(登録商標)接着剤で付着される。8個のマーカーが近位のセグメントへ付着されるが、7個のみが遠位の部分に付着して残される。同じ荷重プロトコルが、上記で概略を述べたように追従される。髄内釘が、定位置に残され、4本のロッキングねじが挿入され、手順が再び繰り返される。釘がその後、取り外される。関節外骨幹端複雑骨折(43-A3AO分類)が、AP遠位のねじ穴の上方3cmおよび4cmに、2つの横切込みを作製し、1cmの隙間を作製することによって模擬された。43-A3骨折は、遠位および近位の脛骨のセグメントを分離する中間骨片の数に従って副分類される(AO Surgery Reference、2009)。これらは、繰り返さないが、しかし、その代わり脛骨片の間の1cmの隙間で表されている。計装化された髄内釘およびロッキングねじが、次に、骨内に再挿入され、同じ荷重手順が繰り返される。
【0131】
骨C
無傷のSawbones(登録商標)が、荷重リグ内に配置された。このSawbones(登録商標)は、12mmまでリーマ加工され、髄内釘が挿入されて、前に1回除去される。9個のタンタルビードが、Araldite(登録商標)によってSawbones(登録商標)近位のおよび遠位のセグメントに糊着されるが、2個のマーカーが、解析中廃棄される。髄内釘が、4本のロッキングねじによって定位置に挿入された。測定が、前のように行われた。ねじおよび釘が取り外された。中軸複雑分節骨折(42-C2AO分類)が、人工の脛骨の近位の端部の下方20.75cm、21.25cm、27.25cmおよび27.75cmに4つの横切込みを作製することによって模擬される。これは、長さ6cmの中間セグメントを作製する。これは、5mmの隙間によって近位のおよび遠位のセグメントの両方から分離される。楔状の骨片の存在は、42-C2骨折のさらなる副分類を必要とする。しかし、この特定のシナリオでは、目的は、楔状骨片を有さない42-C2.1を再作成することである(AO Surgery Reference、2009)。釘およびねじが再挿入され、前に概略を述べたのと同じ状態の下で測定が行われる。
【0132】
4.3点荷重下での髄内釘内の骨片間運動の測定
RSAが、付加される荷重による骨折部位での6自由度での運動(X、YおよびZ平面内での線形変位および回転)の程度を決定するために使用される。
【0133】
3点荷重リグが、RSA補正ケージの前に配置される(図8)。5個のタンタルビードの最小のものが、すべてのSawbones(登録商標)の間を一定の間隔にして、骨折位置のいずれかの側に配置される。
【0134】
釘-骨複合物が、近位の顆ねじの固定点に対して3つの位置に装着される。装着位置は、9、18および27cmである。500mgのフック重りが、0kgを始点として使用される。2kgの増分重りが10kgの最大値まで追加される。増分重りに対する各位置で、2のX線機械から1枚のデジタルフィルムが撮影される。
【0135】
Sawbones(登録商標)のそれぞれに対して、合計で18(3つの位置×6個の重り)枚のデジタルフィルムが撮影され、X、Y、Z平面で骨折部位での荷重対線形および回転変位の測定値を導出するために使用される。
【0136】
X線が、Agfa(登録商標)プロセッサを使用してデジタル処理され、UmRSA(登録商標)処理ソフトウェアへ電気的に送信される。各測定状態の2つのX線を転置し、3次元空間内で補正ケージに対する各骨折端部のタンタルビードを補正することによって、我々は、荷重増加による骨折した骨端部の相対的な変位を定量化することが可能である。このデータはまた、各骨折構成の釘骨複合物、および我々の強化ポリエチレンテープで模擬された「仮骨」の剛性を計算するためにも使用される。
【0137】
5.計装化した釘(仮骨シミュレーション)によるSawbone(登録商標)の剛性の変化の検知
骨折部での、およびしたがって模擬仮骨の剛性の増加を達成するために選択される方法は、骨折を横切る強化ポリエチレンテープのループを付加することである。4つの異なる剛性が、最大で16ループまで、4の倍数の増分のループで強化ポリエチレンテープを付加することによって模擬される。図9は、4ループの強化ポリエチレンテープを使用することを示している。付着される強化ポリエチレンテープの幅は、骨折を横切るタンタルビードの分離に等しい。これらのパラメータの両方は任意である。
【0138】
整復された42-A3骨折が、剛性の変化を検知する釘の能力を試験するために選択された。整復された骨折は、骨折隙間でより少ない運動を与え、したがって、釘の検知能力に対するより激しい変化を表し、結果のより大きな変動をもたらす。
【0139】
RSAが、模擬される「仮骨」の剛性を決定するために使用された。剛性は、変形(曲げ、伸びまたは圧縮)に対する身体の抵抗として定義された。数学的には、これは次のように表される。
【0140】
【数1】
【0141】
Fは、ニュートン単位での付加された力またはモーメントであり、δは、力によって生成された変位である。SI単位は、Nm-1である。
【0142】
C骨折タイプ、骨折位置、仮骨成熟、付加された荷重および歪ゲージの位置との歪の相関関係
(i)人工仮骨の形成
図30に示すように、仮骨は、特徴的な圧縮係数をそれぞれ有する組織の層から成る。(Lacroixら、2001)
E1=肉芽組織(E=0.36MPa)
E2=線維組織(E=1.52MPa)
E3=軟骨(E=11.4MPa)
E4=未熟な骨(E=1.24GPa)
【0143】
以下の人工の類似物質は、仮骨組織の層を模倣するように設計され、骨折治癒の初期の段階を模擬するための、骨の周囲に層状化される。
E1=15%ステンレス鋼(SS)+ポリウレタン注入化合物
E2=15%ヒドロキシアパタイト(HA)+ポリウレタン注入化合物
E3=15%スズ(Sn)+ポリウレタン注入化合物
E4=10% Beech wood shavings(BW)およびAraldite、2014。
【0144】
層状化は、円周上に(C)(図30)、または(ii)離散した四分区間で分割して(S)(図31)のいずれかである。
【0145】
仮骨成長の離散した四分区間の付加順序は次の通りである。
1.外部の仮骨ブリッジ-後方の平面;1日目に付着:層E1-4
2.外部の仮骨ブリッジ-内側の平面;2日目に付着:層E1-4
3.外部の仮骨ブリッジ-外側の平面;3日目に付着:層E1-4
4.外部の仮骨ブリッジ-前方の平面;4日目に付着:層E1-4
【0146】
(ii)計装化した釘に付加された歪/荷重対仮骨成長/剛性の測定
使用された骨折モデルは、整復された42-A2-AO骨折である。
【0147】
計装化した釘が、骨折部位に隣接して、または骨折部位から離れてのいずれかで、(A)45°、(B)0°および/または(C)-45°に方向づけられた、歪ゲージを備える。
【0148】
釘は、治癒の最初の4〜6週間に、以下の荷重パターンを受ける。
- 立脚位「軸から外れた軸方向圧縮荷重」
- 立脚位「4点曲げ荷重」
- 1000N圧縮でのトルク荷重0〜25N.m
【0149】
結果
1.釘内の掘り込まれた歪ゲージの使用による脛骨の骨折部内の髄内釘での軸方向およびねじり荷重に関する歪の測定
軸方向荷重
ゲージBが、釘の長手方向軸と一直線上にあり(すなわち0°)、軸方向歪に対して最も感度が高いように設計されている。付加される軸方向荷重に関する歪値の回帰が、各歪ゲージに対して行われ、図10に示されている。このグラフは、次のようないくつかのキーコンセプトを示している。
【0150】
(i)歪値は、釘の前方の態様上のゲージで最小であり(ポケット1、4および7)、後内側のゲージ(ポケット2、5、8)でより高く、後外側のゲージ(ポケット3、6)でより低い、釘の円周の周囲で歪の差がある。
【0151】
(ii)パターンおよび歪の大きさの両方が、3グループのデータの間でまったく一定である。ねじなし無傷骨およびねじあり無傷骨および無傷骨2。1つのとび値、ねじを備える無傷の骨内のポケット7B内のゲージがあるが、しかしこれは、誤った接続へ追尾されており、さらなるデータ収集の前に修復される。
(iii)2つの骨折が、3つの無傷のシナリオで観察されたパターンから大きな偏差を示し、R2での差の大きさは、骨折部位に近づくほど大きくなっている。
【0152】
トルク荷重
ゲージAおよびC(釘の長手方向軸に対してそれぞれ+45°および-45°で方向づけられた)が、互いに対して垂直に配置され、両方が、トルクに対して感度が高いように設計されている。理論上、それらの相対的な配置は、等しいおよび反対の歪値結果となるべきである。
【0153】
図11は、次のようないくつかのキーコンセプトを示している。
(i)無傷でない、固定されていない釘で、最小の歪応答。
(ii)無傷の、固定された釘に対しての釘の長さに沿った歪の等しい分配。
(iii)遠位の中軸骨折に対して骨折した骨がポケット6を頂点としてゲージ位置が、より遠位に移動したとき歪の大きさの増加。
(iv)軸方向圧縮よりもねじりでのほうが、釘歪が大きい。
【0154】
主歪の大きさおよび方向
所与の位置でのすべての3のゲージに対して得られた歪値を合算することによって、特定のゲージに関する歪の大きさおよび主歪の方向を決定することが可能である。
【0155】
図12および13は、軸方向力およびトルクの下での中軸骨折(42-C2)に対する歪の大きさおよび主歪の方向を示している。いくつかのキーコンセプトは次の通りである。
(i)トルクおよび軸方向力の両方に対して歪の大きさの大きな変化がある。この変化は、ポケット5および6内のゲージによって検知された骨折部位近づくほど大きくなる。
(ii)骨折は、軸方向歪よりもねじりに与える影響が大きい。
(iii)ポケット6および7内のゲージによって検知される軸方向荷重以外は、主歪の方向は、あまり変わらないようにみえる。
【0156】
図14および15は、軸方向力およびトルクの下での遠位の骨折(AO42-A3)に対する歪の大きさおよび主歪の方向を示している。いくつかのキーコンセプトは次の通りである。
(i)歪の大きさが中軸骨折と比較して遠位で増加している。
(ii)主歪の方向が、軸方向力の付加と比較してねじり応力に対して相対的に影響されない。
(iii)歪の方向が、骨折した骨内でゲージBとより一直線上にある。歪方向が、釘の長手方向軸と一直線上にあるように変化したことを示している。
【0157】
RSAを使用した軸方向およびねじり荷重下での髄内釘内の骨片間運動の測定
骨片間運動の精密度および精度測定
放射線写真を解析するとき、Sawbones(登録商標)内に挿入されたすべてのタンタルマーカーを見ることが可能である。UmRSA(登録商標)ソフトウェアによって測定された定着と「最も基準となる」マイクロメータの間の差がゼロではないため、精度および精密度計算が行われる。
【0158】
タンタルビードが、Sawbones(登録商標)の各セグメント内に不規則な方式で挿入され、各セグメント内でのそれらの相対的な配置が、「状態数」として公知の測定によって定量化される。状態数は、タンタルビードの配置によって変化する。低い数は良好なマーカー分散を示し、高い数はマーカーがより線形の方式で配置されていることを示唆している。
【0159】
線形変位に対する剛体フィッティング(ME)値の平均誤差は、近位の骨片に対して2μmから21μmの間で、および遠位のセグメントに対して4μmから18μmまで変動する。これらの値は、角運動で見られたものと同様である。近位のセグメントに対して2μmから12μmの範囲であり、遠位のセグメントに対して5μmから20μmの範囲であった。y軸回転に対して、近位のセグメントに対するME値は、2μmから15μmの間に広がり、遠位のセグメントに対するME値は、6μmから15μmの間で変動した。
【0160】
角運動およびy軸回転の状況では、精密度を計算するために使用されるタンタルビードの数が8から3に減少すると、状態数が増加した。y回転については、3個マーカーで測定したときが(0.145°)8個のマーカーで測定したときよりも(0.099°)精密度が1.46倍だけ減少した。角運動では、8個(0.01°)よりも3個のマーカー(0.095°)を使用して計算したとき精密度が9.5倍悪くなった。
【0161】
x、yおよびz平面内での線形運動の精密度もまた、マーカーの量が減少したときに状態数が増加することを表している。線形変位に対する最良の精密度は、8個のマーカーで計算したy軸運動に対するものであり(±10.7μm)、最悪のものは、8個のマーカーを使用して測定したz軸運動である(±144.7μm)。xおよびy軸線形変位に対しては、マーカーの数および状態数は、精密度への影響をほとんど有さないようにみえる。
【0162】
y軸回転について、予測区間の平均値、すなわちRSA測定の精度が、±0.04°から±0.136°(R2≧0.998≦1、p<0.0005)の間で変動する。角運動は、±0.036°から±0.04°(R2≦1、p<0.0005)の間の範囲の精度を有する。両タイプの運動では、3個のみのタンタルビードが計算のために使用されていたとき、最悪の精度が測定された。y軸回転の場合、マーカーの数を8から3に減少させると、すなわち状態数が増加すると、精度が3.3倍減少した。
【0163】
線形変位に対する精度は、±4.46μmから±60.3μm(R2≧0.962≦1、p<0.0005)の範囲であった。並進運動に対する最良の精度はy軸のものであり、最悪の精度はz軸のものであった。xおよびy軸では、タンタルマーカーの数およびそれらの分散の程度は、精度値への影響をほとんど有さないようにみえる。
【0164】
骨片間並進運動/微細運動測定
図16は、無傷の骨内の近位のセグメントに対する遠位のセグメントのY軸並進運動(微細運動)を示す。
【0165】
図17は、無傷の骨内の近位のセグメントに対する遠位のセグメントのY軸回転を示す。
【0166】
図18は、AO43-A3骨折部内の近位のセグメントに対する遠位のセグメントのY軸並進運動(微細運動)を示す。
【0167】
図19は、AO43-A3骨折部内の近位のセグメントに対する遠位のセグメントのY軸回転を示す。
【0168】
図20は、AO42-C2骨折部内の近位のセグメントに対する遠位のセグメントのY軸並進運動(微細運動)を示す。
【0169】
図21は、AO42-C2骨折部内の近位のセグメントに対する遠位のセグメントのY軸回転を示す。
【0170】
3.脛骨の骨折での髄内釘内の3点荷重に関連する歪の測定
さまざまな骨折構成(AO:42-A3、42-C2、43-A1、骨折していないsawbone(登録商標))の歪ゲージの感度に対する影響の試験
結果およびグラフを解釈するとき、歪ゲージポケットに対する骨折の位置を記述することが必須である。この関係は、以下の通りである。
1.整復されたAO42-A3単純横骨折-ポケット6(ポケット5および7が隣接している)に重なる。
2.整復されていない横骨折AO43-A1-ポケット8に重なる。
3.整復されていない分節骨折AO42-C2-ポケット4、5および6に重なり、近位のおよび遠位の骨折線が、ポケット4および6にそれぞれ重なる。
【0171】
図22は、歪ゲージポケットの数に対してプロットされた感度(マイクロストレイン/kg)を示し、分節骨折と、2つの脛骨の懸下点の間18cmで中間に付加されている荷重モーメントの関係を示している(近位のおよび遠位の脛骨の懸下点の間距離=36cm)。この整復されていない骨折構成では、近位のおよび遠位の骨折線が、ポケット4および6とそれぞれ重なり、骨折セグメントがポケット5と重なる。基準線からの感度(マイクロストレイン/kg)の最大の変化が、0°ゲージでみられる。これらのゲージでは、最大のたわみが、ポケット4、近位の骨折線、セグメントの下にあるポケット5および遠位の骨折線の下にあるポケット6で生じる。モーメントはこの場合、ポケット4および5の間の18cmの所に付加される。我々はこのようにして、3点荷重ではこれらが基準線からの最大のたわみを示すため、測定のために8個のポケットのそれぞれで0°ゲージを選択することを正当化することができる。
【0172】
図23〜26は、無傷のSawbone(登録商標)および3個の模擬されたsawbone(登録商標)骨折(それぞれAO42-A3、43-A1、42-C1)に対する、歪ゲージポケットの位置に対する感度(マイクロストレイン/kg)をプロットしている。プロットのそれぞれが特定の骨折を表す際に、5つの付加されるモーメントも示される。
【0173】
図23は、5つの別々の位置で3点荷重を受ける無傷のSawbone(登録商標)に対する歪ゲージポケットに対する感度のトレース図を示している。これは、正のピーク感度が、張力下のゲージ内で生じることを示している(ポケット2、3、5、6および8)。これらは、釘の凸状の側の内側および外側のポケットである。負のピーク感度は、圧縮下のポケットで生じる(1、4および7)。これらは、釘の凹状の側の前方のポケットである。無傷の38cm脛骨Sawbone(登録商標)では、ポケット2、5および8で正の感度ピークの3モードの分布があるようにみえる。これらは、外側のポケットに対応している。荷重の間の外側表面上での釘の回転の結果、内側のポケットの感度はより低い可能性がある。荷重がそれに付加された場合ポケットの感度が増加することも観察できる。骨折が存在しないため、我々は、8個の歪ゲージポケットのすべてが等しい感度を有し、これらの感度は、モーメントの付加位置によってのみ影響を受けることを予測したであろう。したがって、我々は、同様のピーク感度を有する対称なグラフを予測したであろう。我々のグラフでの不一致は、より感度が高いゲージが、モーメント付加点により近いという事実によって説明される。
【0174】
図24は、ポケット6(ポケット5および7が隣接している)と重なるAO42-A3骨折を示している。骨折部位に最も近いポケットもまた、この骨折構成では最も感度が高い。骨折部位の下のポケットに、この場合22.5cmで、モーメントを付加することによって、感度が、最大化される。
【0175】
図25は、ポケット7と8の間に重なるAO43-A1骨折を示している。ポケット7および8は、歪ゲージ感度が最大である27cmでのモーメントで、最も感度が高い。
【0176】
図26は、ポケット4、5および6に重なるAO42-C2骨折を示しており、近位のおよび遠位の骨折線が、ポケット4および6とそれぞれ重なっている。この分節骨折では、パターンが繰り返される。ポケット4および5が、最大のたわみを示している。我々はしかし、ポケット6がポケット7よりも大きいたわみを示すことを予測したであろう。
【0177】
以下の図23〜26から、次のことが観察される。
1)3点荷重を受ける3つの骨折構成の場合、最大の感度は、骨折部位に最も近い歪ゲージで得られる。
2)骨折部位に曲げモーメントを付加することは、下にある歪ゲージの感度を300歪値/kgまで最大化する(骨折AO42-C2で)。
3)歪ゲージは、骨折していないおよび整復されたSawbones(登録商標)によって示されたように、釘骨複合物が強化されたとき、より感度が低くなる。
4)骨折していないsawbone(登録商標)では、骨折したSawbones(登録商標)で見出されたのと同じように、歪ゲージポケットへ曲げモーメントを付加することが、その感度を増加させる。8個の歪ゲージポケットすべてが、ほぼ等しい感度を有するようにみえる。
【0178】
3点荷重に応答した骨片間運動
RSA方法論を使用することには2つの目的がある。RSAの第1の目的は、歪値対荷重(Kg)測定を制御する働きをすることである。第2の目的は、骨折部位で、付加された曲げモーメントと曲げの関係が確立されることを可能にすることである。
【0179】
これらの結果は、模擬された「仮骨」剛性が生理学的な代表値であることを示すためのものである。
Z平面内の回転が、骨の曲げを測定するために選択された。
結果(図27)は、荷重の増加によるZ回転の増加があることを示している。このことは、荷重の増加とともに増加する(引張下にあるとき、圧縮下では減少する)歪値の読取値を確認している。
【0180】
前記計装化した釘(仮骨シミュレーション)によるSawbones(登録商標)の剛性の変化の検知
図28は、釘-骨複合物の剛性を徐々に増加させたときの歪ゲージポケットに対する感度のトレース図である。複合物の剛性が高いほど、ピーク感度はより小さい。(キー:DT=強化ポリエチレンテープ、数は、強化ポリエチレンテープのループの数を示す)。
【0181】
このグラフは、計装化した釘が剛性の変化を検知できるという概念を支持している。この能力は、釘-骨複合物剛性の経時的な変化に基づく癒合遅延および非癒合を検知することができるその究極的な役割を満たす場合、計装化した釘の必須の特性である。
【0182】
強化ポリエチレンテープ「仮骨」シミュレーションの剛性を定量化するために、DT-4ループおよびDT-8ループモデルで、RSAが行われた。
【0183】
4および8ループ強化ポリエチレンテープ「仮骨」モデルに対する荷重でのZ平面内の回転のRSAトレース図(図29)が、勾配の逆数を計算することによって剛性の定量化を可能にする。
【0184】
模擬される「仮骨」釘-骨複合物の剛性は、以下のように計算される。
DT-4ループに対して、Z回転勾配=-0.076度/kg、したがって剛性=1/勾配=13.15kg/°=131.5N/°。モーメント18cm=23.6Nm/°。
DT-8ループに対して、Z回転勾配=-0.065度/kg、したがって剛性=1/勾配=15.4kg/°=154N/°。モーメント18cm、剛性=27.7Nm/°。
【0185】
強化ポリエチレンテープなしでの骨折の勾配は、DT-4およびDT-8に対してよりも大きな剛性を示している。しかし、2つの変数の間の相関関係は、この場合も低い。このことは、これが、接着の結果であることを示唆している。
【0186】
4および8ループの強化ポリエチレンテープによって模擬される「仮骨」の矢状平面内の剛性は、それぞれ23.6Nm/°および27.7Nm/°に等しい。8ループ「仮骨」は、予想よりも剛性が高く、1度の回転を生成するためにより大きなモーメントを必要とする。両方のシミュレーションは、人の骨の仮骨剛性のおそらく生理学的範囲内にある。Richardsonらによる業績から、脛骨の癒合点の仮骨は、矢状平面内で15Nm/°の剛性を有するように考慮されうる。
【0187】
計装化した釘は、少なくとも27.7-23.6=4.1Nm/°の剛性の差を検知することができる。このように、釘は、生理学に関連した剛性の変化を検知することができるのに十分な解像度を有する。最終的には、釘は、仮骨形成の最初の1か月での剛性の変化を検知することができるほど十分感度が高くなければならない。
【0188】
4.歪の骨折タイプ、骨折位置、仮骨成熟、付加された荷重および歪ゲージの位置との相関関係
図32
骨折モデル:
整復された骨折42-A2-AO
荷重パターン:模擬された治癒の4〜6週間中の立脚位「軸から外れた軸方向圧縮荷重」
ゲージは、ポケット4(ゲージ方向A=45°)およびポケット5(ゲージ方向B=0°)内の骨折部位の両側に配置された。
S=仮骨のセグメント付加;C=仮骨の円周上付加
【0189】
結論:
骨折部位の遠位に配置されたポケット5内のゲージBが、仮骨形成の両方のモデルで経時的な仮骨成長/剛性増加を感知することが可能である。
【0190】
骨折部位の近位に配置されたポケット4内のゲージAが、軸から外れた軸方向圧縮荷重下で、仮骨形成のいずれかのモデルで経時的な仮骨成長/剛性増加を感知するほど十分感度が高くない。
【0191】
図33
骨折モデル:
整復された骨折42-A2-AO
荷重パターン:模擬された治癒の4〜6週間中の立脚位「軸から外れた軸方向圧縮荷重」
ゲージは、ポケット1(ゲージ方向B=0°)およびポケット9(ゲージ方向B=0°)内の釘の遠位および近位の端部に配置された。
S=仮骨のセグメント付加;C=仮骨の円周上付加
【0192】
結論:
釘の前記遠位の端部に配置されたポケット9内のゲージBは、仮骨が円周上に付加される仮骨形成のモデル内で、経時的な仮骨成長/剛性増加を感知することができるが、このゲージは、ポケット5内のゲージほど感度が高くない(図32参照)。また、このゲージは、仮骨がセグメント付加される仮骨形成のモデル内で、経時的な仮骨成長/剛性増加を感知することができず、したがって、このゲージは、このタイプの骨折パターンの骨折治癒を判定するために臨床的に有用であるとみなされない。
【0193】
ポケット1内のゲージBは、仮骨形成のモデルで経時的な仮骨成長/剛性増加を感知するほど十分感度が高くない。
【0194】
図34
骨折モデル:
整復された骨折42-A2-AO
荷重パターン:模擬された治癒の4〜6週間中の仰臥位「4点曲げ荷重」
ゲージは、ポケット1(ゲージ方向B=0°)およびポケット9(ゲージ方向B=0°)内の釘の遠位および近位の端部に配置された。
S=仮骨のセグメント付加;C=仮骨の円周上付加
【0195】
結論:
ポケット1内のゲージBは、仮骨が円周上に付加される仮骨形成のモデルで経時的な仮骨成長/剛性増加を感知することが可能である。
ポケット1内のゲージBは、仮骨が、セグメント付加される、仮骨形成のモデルで経時的な仮骨成長/剛性増加を感知することが可能である。しかし、かなりの量の「ノイズ」がある。
ポケット9内のゲージBは、仮骨形成のモデルのいずれかで経時的な仮骨成長/剛性増加を感知するほど十分感度が高くない。これは、釘の遠位のセクションと髄内の管の壁との接触の結果であり得るが、これは歪測定の干渉に至ることがある。
【0196】
図35
骨折モデル:
整復された骨折42-A2-AO
荷重パターン:模擬された治癒の4〜6週間中の仰臥位「4点曲げ荷重」
ゲージは、ポケット4(ゲージ方向B=0°)およびポケット5(ゲージ方向C=-45°)内の骨折部位の両側に配置される。
S=仮骨のセグメント付加;C=仮骨の円周上付加
【0197】
結論:
ポケット4内のゲージBは、仮骨形成の両方のモデルで経時的な仮骨成長/剛性増加を感知することが可能である。
ポケット5内のゲージBおよびポケット4内のゲージCは、仮骨形成のモデルのいずれかで経時的な仮骨成長/剛性増加を感知するほど十分感度が高くない。
【0198】
図36
骨折モデル:
整復された骨折42-A2-AO
荷重パターン:模擬された治癒の4〜6週間の立脚位「1000N圧縮でのトルク荷重0〜2.5N.m」
ゲージは、ポケット1、4、5および9(ゲージ方向A=45°)の、近位のおよび遠位の端部のいずれかに配置される。
S=仮骨のセグメント付加;C=仮骨の円周上付加
【0199】
結論:
Aゲージのすべては、骨折部位に対する釘上の位置に関わらず、トルク荷重が仰臥位で付加されたとき、いずれかのモデルで経時的な仮骨成長/剛性増加を十分に感知することが可能である。
【0200】
図37
骨折モデル:
整復された骨折42-A2-AO
荷重パターン:模擬された治癒の4〜6週間中の仰臥位「ゼロ圧縮荷重でのトルク荷重0〜2.5N.m」
ゲージはポケット1、4、5および9(ゲージ方向A=45°)内の近位のおよび遠位の端部のいずれかに配置される。
S=仮骨のセグメント付加;C=仮骨の円周上付加
【0201】
結論:
同様に、Aゲージのすべては、骨折部位に対する釘上の位置に関わらず、トルク荷重が仰臥位で付加されたとき、いずれかのモデルで経時的な仮骨成長/剛性増加を十分に感知することが可能である。
【0202】
図38
骨折モデル:
整復された骨折42-A2-AO
荷重パターン:模擬された治癒の4〜6週間中の仰臥位「ゼロ圧縮荷重でのトルク荷重0〜2.5N.m」
ゲージはポケット1、4、5および9(ゲージ方向B=0°)内の近位のおよび遠位の端部のいずれかに配置される。
S=仮骨のセグメント付加;C=仮骨の円周上付加
【0203】
結論:
Bゲージのどれもが、トルク荷重が仰臥位で付加されたとき、いずれかのモデルで経時的な仮骨成長/剛性増加を感知するために満足なものとして考慮されていない。
【0204】
全体の結論
特に45°(すなわちゲージAおよびC)でのトルクゲージは、骨折部位から離れた歪の減少を検知することができるが、部位の位置を決定することはできないようである。
【0205】
オフセット軸方向荷重は、特に0°(すなわちゲージB)以外の、複数のゲージ部位から部位の位置を検知することができるが、遠位の位置の骨折部位の歪の変化を検知することができない。
【0206】
4点曲げもまた、離れた位置での歪の変化を検知することができるが、トルク曲げは同様にできない。
【符号の説明】
【0207】
1、4、7 前方ポケット
3、6 内側ポケット
2、5、8 後方ポケット
【特許請求の範囲】
【請求項1】
(a)長手方向軸を有する整形外科インプラントであって、
(i)前記インプラントの前記長手方向軸に対して約+45°および/または約-45°で方向づけられた歪ゲージと、
(ii)前記歪ゲージ(複数可)を受けるように構成されたくぼみと、
(iii)少なくとも1つの電源、第1の送信機、第1の受信機、および第1のマイクロプロセッサと電気的に接続された電子構成部品と、
(iv)前記電子構成部品を受けるように構成されたくぼみと、
(v)前記くぼみを密封するための注入材料と、
(vi)前記電子構成部品と電気的に接続された電源と
を備える整形外科インプラント、ならびに
(b)
(vii)第2のマイクロプロセッサと、
(viii)前記第2マイクロプロセッサと電気的に接続され、前記電子構成部品の前記第1の受信機へ信号を送信するように構成された第2の送信機と、
(ix)前記第2のマイクロプロセッサと電気的に接続され、前記電子構成部品の前記送信機からデータを受信するように構成された第2の受信機と
を備える制御ユニット
を備える遠隔測定整形外科インプラントシステム。
【請求項2】
前記インプラントの前記長手方向軸に対して約0°でおよび/または約90°で方向づけられた少なくとも1つのさらなる歪ゲージを備える請求項1に記載の遠隔測定整形外科インプラントシステム。
【請求項3】
前記くぼみが、約+45°で方向づけられた歪ゲージおよび約0°で方向づけられたゲージ、または約+45°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージ、または約-45°で方向づけられた歪ゲージおよび約0°で方向づけられた歪ゲージ、または約-45°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージを備える請求項1に記載の遠隔測定整形外科インプラントシステム。
【請求項4】
前記くぼみが、約+45°で配置された歪ゲージ、約-45°で方向づけられた歪ゲージおよび約0°で方向づけられた歪ゲージを備える請求項2または3に記載の遠隔測定整形外科インプラントシステム。
【請求項5】
前記歪ゲージおよび前記電子構成部品を受けるための前記くぼみが、同じくぼみである請求項1から4のいずれかに記載の遠隔測定整形外科インプラントシステム。
【請求項6】
単一のくぼみがある請求項1から5のいずれかに記載の遠隔測定整形外科インプラントシステム。
【請求項7】
前記単一のくぼみが、前記遠隔測定整形外科インプラントの近位の部分内に配置されている請求項6に記載の遠隔測定整形外科インプラントシステム。
【請求項8】
前記整形外科インプラントが髄内釘である請求項1から7のいずれかに記載の遠隔測定整形外科インプラントシステム。
【請求項9】
遠隔測定整形外科インプラントであって、
(i)前記インプラントの長手方向軸に対して約+45°および/または約-45°で方向づけられた歪ゲージと、
(ii)前記歪ゲージ(複数可)を受けるように構成されたくぼみと、
(iii)少なくとも1つの電源、第1の送信機、第1の受信機、および第1のマイクロプロセッサと電気的に接続された電子構成部品と、
(iv)前記電子構成部品を受けるように構成されたくぼみと、
(v)前記くぼみを密封するための注入材料と、
(vi)前記電子構成部品と電気的に接続された電源と
を備える遠隔測定整形外科インプラント。
【請求項10】
前記インプラントの前記長手方向軸に対して約0°でおよび/または約90°で方向づけられた少なくとも1つのさらなる歪ゲージを備える遠隔測定整形外科インプラント。
【請求項11】
前記歪ゲージおよび前記電子構成部品を受けるための前記くぼみが、同じくぼみである請求項9または10に記載の遠隔測定整形外科インプラントシステム。
【請求項12】
単一のくぼみがある、請求項9から11のいずれかに記載の遠隔測定整形外科インプラントシステム。
【請求項13】
前記単一のくぼみが、前記インプラントの近位の部分内に配置されている請求項12に記載の遠隔測定整形外科インプラントシステム。
【請求項14】
前記遠隔測定整形外科インプラントが、髄内釘である請求項9から13のいずれかに記載の遠隔測定整形外科インプラントシステム。
【請求項15】
請求項1から8のいずれかに記載のシステムでの請求項9または14のいずれかに記載の遠隔測定整形外科インプラントの使用。
【請求項16】
埋込み式遠隔測定整形外科インプラント上に付加される機械的な荷重を測定する方法であって、
(i)請求項9から14のいずれかに記載の埋込み式遠隔測定整形外科インプラントを有する対象を配置する段階と、
(ii)前記インプラントに機械的な荷重を付加する段階と、
(iii)前記インプラントが担持する前記機械的な荷重を決定するために、少なくとも1つの歪ゲージに問合せする段階と
を含む方法。
【請求項17】
対象内の骨折治癒を監視する方法であって、
(i)所望の機械的な荷重を付加するのに適した位置に、請求項9から14のいずれかに記載の遠隔測定整形外科インプラントを有する対象を配置する段階と、
(ii)前記インプラントに前記機械的な荷重を付加する段階と、
(iii)前記インプラント内に設けられた少なくとも1つの歪ゲージに問合せする段階と、
(iv)前記歪を基準骨折治癒曲線と相関させる段階と
を含む方法。
【請求項18】
前記機械的な荷重がトルクであり、かつ問合せされる前記少なくとも1つの歪ゲージが、前記長手方向軸に対して約+45°でまたは約-45°で方向づけられる請求項17に記載の方法。
【請求項19】
前記機械的な荷重が、オフセット軸方向圧縮であり、かつ問合せされている前記少なくとも1つの歪ゲージが、前記長手方向軸に対して約0°でまたは約90°で方向づけられる請求項17に記載の方法。
【請求項20】
骨折部が、整形外科固定デバイスと固定されている、前記骨折部内の、骨片間運動の測定のための放射線体積測定(RSA)解析の使用。
【請求項21】
骨折部内の骨片間運動を計測する方法であって、前記骨折部が骨折固定デバイスによって固定され、前記方法が、
(i)複数の放射線不透過マーカーを前記骨折した骨および/または前記骨折固定デバイスに付随させる段階と、
(ii)複数の放射線不透過マーカーを備える補正ケージを前記骨折部位に関する既知の位置に配置する段階と、
(iii)前記骨折部位および前記補正ケージが、少なくとも2つの角度から同時にX線照射される、前記骨折部位の放射線写真検査を行う段階と、
(iv)前記補正ケージ内の前記放射線不透過マーカーの位置に基づいて3次元座標系を生成する段階と、
(v)前記骨折した骨および/または前記骨折固定デバイスに関連する前記放射線不透過マーカーの3次元位置を前記3次元座標系と比較する段階と
を含む方法。
【請求項22】
添付の実施例、表および図面を参照にして実質上本明細書で説明されるような方法、デバイスおよびシステム。
【請求項1】
(a)長手方向軸を有する整形外科インプラントであって、
(i)前記インプラントの前記長手方向軸に対して約+45°および/または約-45°で方向づけられた歪ゲージと、
(ii)前記歪ゲージ(複数可)を受けるように構成されたくぼみと、
(iii)少なくとも1つの電源、第1の送信機、第1の受信機、および第1のマイクロプロセッサと電気的に接続された電子構成部品と、
(iv)前記電子構成部品を受けるように構成されたくぼみと、
(v)前記くぼみを密封するための注入材料と、
(vi)前記電子構成部品と電気的に接続された電源と
を備える整形外科インプラント、ならびに
(b)
(vii)第2のマイクロプロセッサと、
(viii)前記第2マイクロプロセッサと電気的に接続され、前記電子構成部品の前記第1の受信機へ信号を送信するように構成された第2の送信機と、
(ix)前記第2のマイクロプロセッサと電気的に接続され、前記電子構成部品の前記送信機からデータを受信するように構成された第2の受信機と
を備える制御ユニット
を備える遠隔測定整形外科インプラントシステム。
【請求項2】
前記インプラントの前記長手方向軸に対して約0°でおよび/または約90°で方向づけられた少なくとも1つのさらなる歪ゲージを備える請求項1に記載の遠隔測定整形外科インプラントシステム。
【請求項3】
前記くぼみが、約+45°で方向づけられた歪ゲージおよび約0°で方向づけられたゲージ、または約+45°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージ、または約-45°で方向づけられた歪ゲージおよび約0°で方向づけられた歪ゲージ、または約-45°で方向づけられた歪ゲージおよび約90°で方向づけられた歪ゲージを備える請求項1に記載の遠隔測定整形外科インプラントシステム。
【請求項4】
前記くぼみが、約+45°で配置された歪ゲージ、約-45°で方向づけられた歪ゲージおよび約0°で方向づけられた歪ゲージを備える請求項2または3に記載の遠隔測定整形外科インプラントシステム。
【請求項5】
前記歪ゲージおよび前記電子構成部品を受けるための前記くぼみが、同じくぼみである請求項1から4のいずれかに記載の遠隔測定整形外科インプラントシステム。
【請求項6】
単一のくぼみがある請求項1から5のいずれかに記載の遠隔測定整形外科インプラントシステム。
【請求項7】
前記単一のくぼみが、前記遠隔測定整形外科インプラントの近位の部分内に配置されている請求項6に記載の遠隔測定整形外科インプラントシステム。
【請求項8】
前記整形外科インプラントが髄内釘である請求項1から7のいずれかに記載の遠隔測定整形外科インプラントシステム。
【請求項9】
遠隔測定整形外科インプラントであって、
(i)前記インプラントの長手方向軸に対して約+45°および/または約-45°で方向づけられた歪ゲージと、
(ii)前記歪ゲージ(複数可)を受けるように構成されたくぼみと、
(iii)少なくとも1つの電源、第1の送信機、第1の受信機、および第1のマイクロプロセッサと電気的に接続された電子構成部品と、
(iv)前記電子構成部品を受けるように構成されたくぼみと、
(v)前記くぼみを密封するための注入材料と、
(vi)前記電子構成部品と電気的に接続された電源と
を備える遠隔測定整形外科インプラント。
【請求項10】
前記インプラントの前記長手方向軸に対して約0°でおよび/または約90°で方向づけられた少なくとも1つのさらなる歪ゲージを備える遠隔測定整形外科インプラント。
【請求項11】
前記歪ゲージおよび前記電子構成部品を受けるための前記くぼみが、同じくぼみである請求項9または10に記載の遠隔測定整形外科インプラントシステム。
【請求項12】
単一のくぼみがある、請求項9から11のいずれかに記載の遠隔測定整形外科インプラントシステム。
【請求項13】
前記単一のくぼみが、前記インプラントの近位の部分内に配置されている請求項12に記載の遠隔測定整形外科インプラントシステム。
【請求項14】
前記遠隔測定整形外科インプラントが、髄内釘である請求項9から13のいずれかに記載の遠隔測定整形外科インプラントシステム。
【請求項15】
請求項1から8のいずれかに記載のシステムでの請求項9または14のいずれかに記載の遠隔測定整形外科インプラントの使用。
【請求項16】
埋込み式遠隔測定整形外科インプラント上に付加される機械的な荷重を測定する方法であって、
(i)請求項9から14のいずれかに記載の埋込み式遠隔測定整形外科インプラントを有する対象を配置する段階と、
(ii)前記インプラントに機械的な荷重を付加する段階と、
(iii)前記インプラントが担持する前記機械的な荷重を決定するために、少なくとも1つの歪ゲージに問合せする段階と
を含む方法。
【請求項17】
対象内の骨折治癒を監視する方法であって、
(i)所望の機械的な荷重を付加するのに適した位置に、請求項9から14のいずれかに記載の遠隔測定整形外科インプラントを有する対象を配置する段階と、
(ii)前記インプラントに前記機械的な荷重を付加する段階と、
(iii)前記インプラント内に設けられた少なくとも1つの歪ゲージに問合せする段階と、
(iv)前記歪を基準骨折治癒曲線と相関させる段階と
を含む方法。
【請求項18】
前記機械的な荷重がトルクであり、かつ問合せされる前記少なくとも1つの歪ゲージが、前記長手方向軸に対して約+45°でまたは約-45°で方向づけられる請求項17に記載の方法。
【請求項19】
前記機械的な荷重が、オフセット軸方向圧縮であり、かつ問合せされている前記少なくとも1つの歪ゲージが、前記長手方向軸に対して約0°でまたは約90°で方向づけられる請求項17に記載の方法。
【請求項20】
骨折部が、整形外科固定デバイスと固定されている、前記骨折部内の、骨片間運動の測定のための放射線体積測定(RSA)解析の使用。
【請求項21】
骨折部内の骨片間運動を計測する方法であって、前記骨折部が骨折固定デバイスによって固定され、前記方法が、
(i)複数の放射線不透過マーカーを前記骨折した骨および/または前記骨折固定デバイスに付随させる段階と、
(ii)複数の放射線不透過マーカーを備える補正ケージを前記骨折部位に関する既知の位置に配置する段階と、
(iii)前記骨折部位および前記補正ケージが、少なくとも2つの角度から同時にX線照射される、前記骨折部位の放射線写真検査を行う段階と、
(iv)前記補正ケージ内の前記放射線不透過マーカーの位置に基づいて3次元座標系を生成する段階と、
(v)前記骨折した骨および/または前記骨折固定デバイスに関連する前記放射線不透過マーカーの3次元位置を前記3次元座標系と比較する段階と
を含む方法。
【請求項22】
添付の実施例、表および図面を参照にして実質上本明細書で説明されるような方法、デバイスおよびシステム。
【図1】

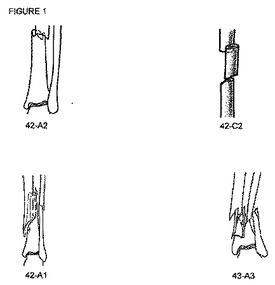
【図2】
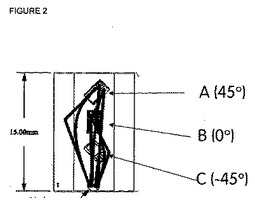
【図4】

【図5】
【図6】
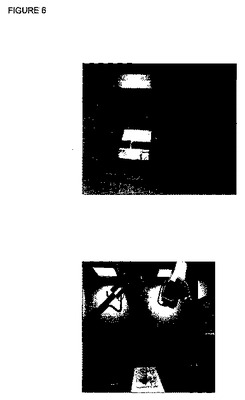
【図7】
【図8】
【図9】
【図10】
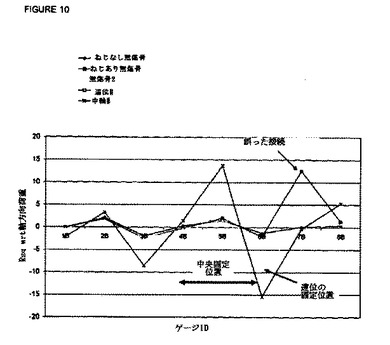
【図11】
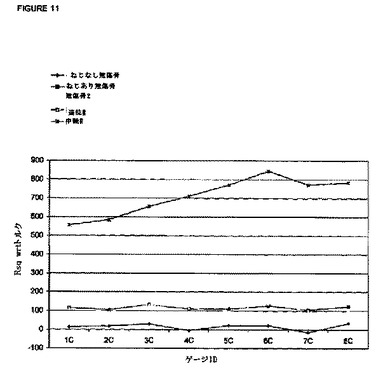
【図12】
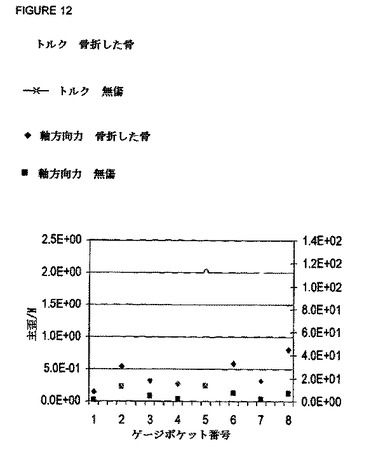
【図13】
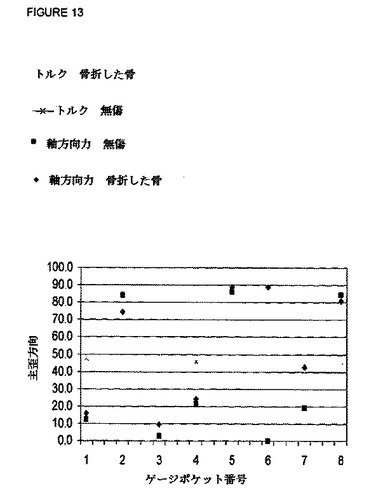
【図14】
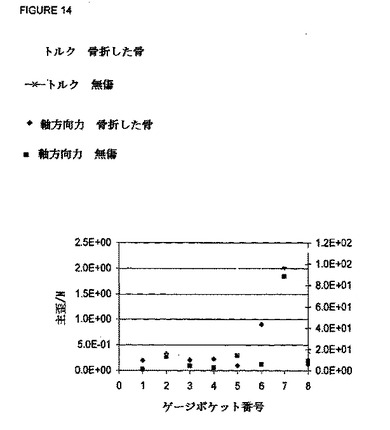
【図15】
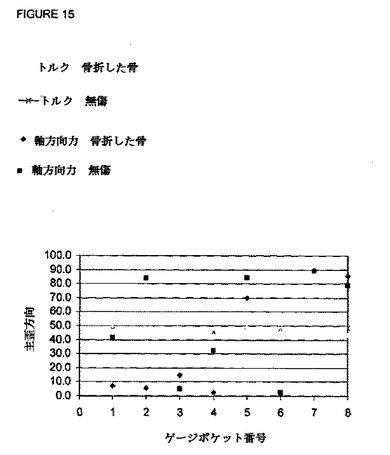
【図16】
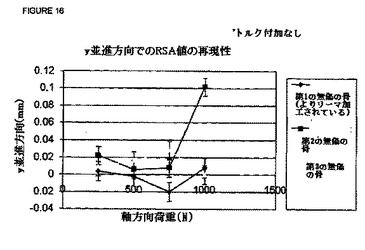
【図17】
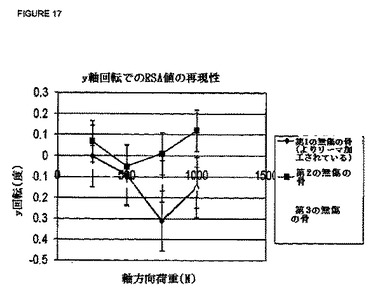
【図18】
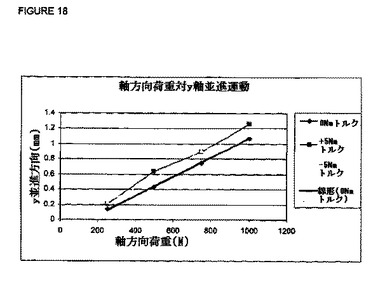
【図19】
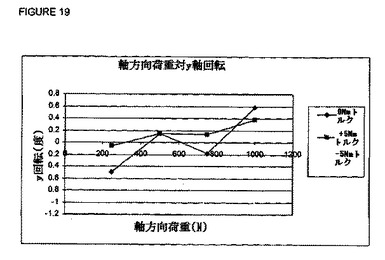
【図20】
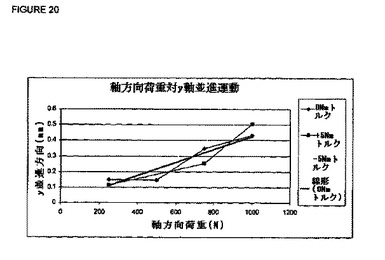
【図21】
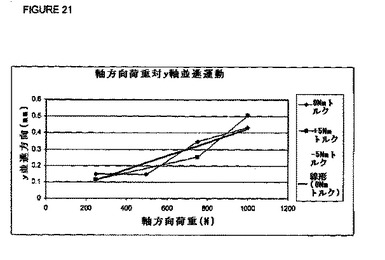
【図22】
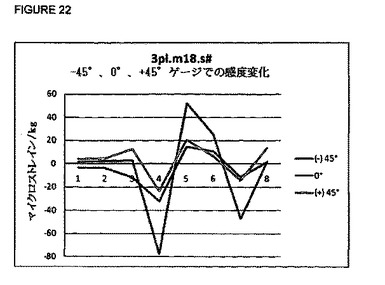
【図23】
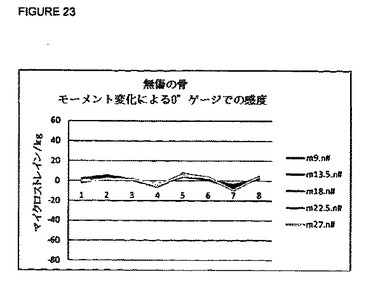
【図24】
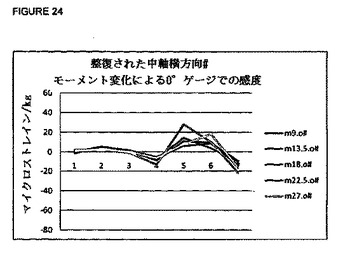
【図25】
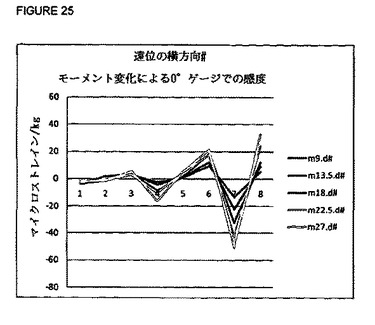
【図26】
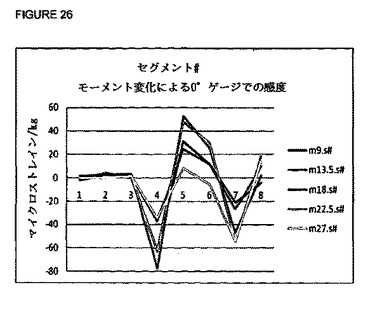
【図27a】
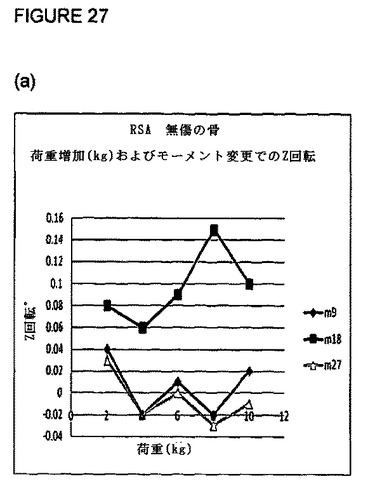
【図27b】
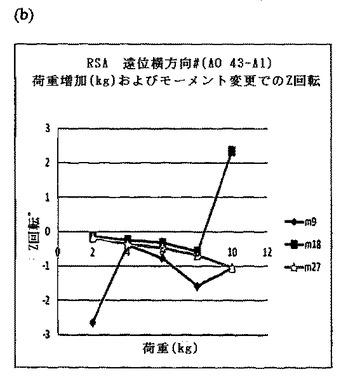
【図27c】
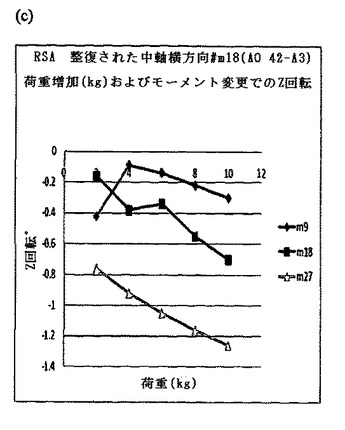
【図27d】
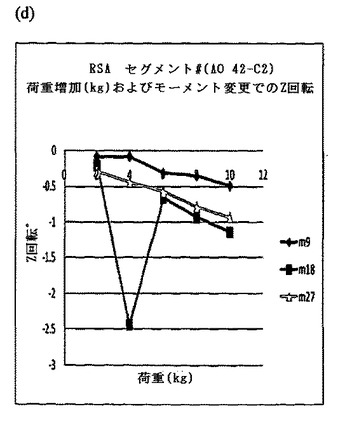
【図28】
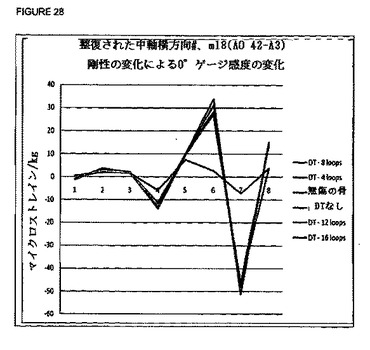
【図29】
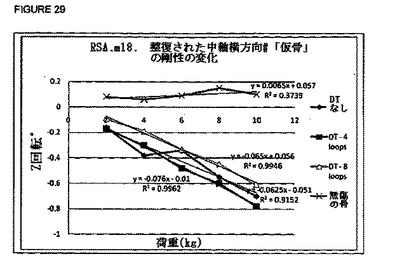
【図30】
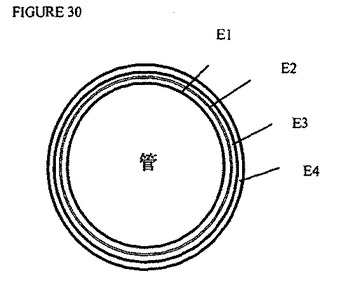
【図31】
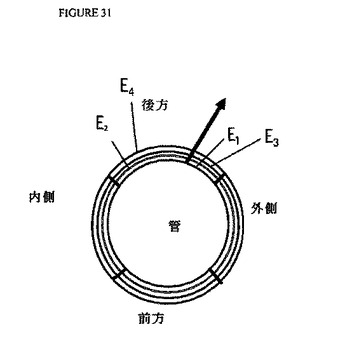
【図3】
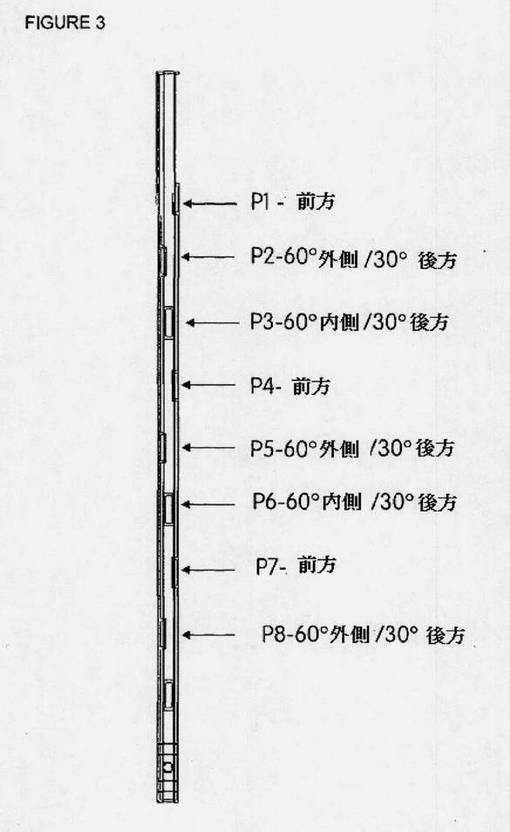
【図32】
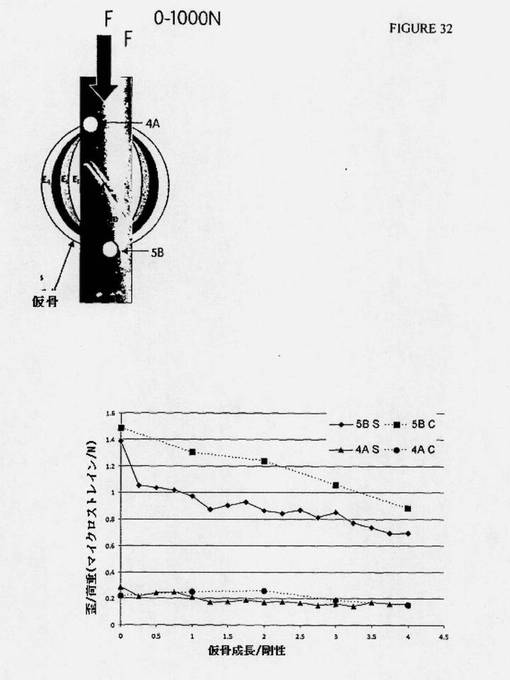
【図33】
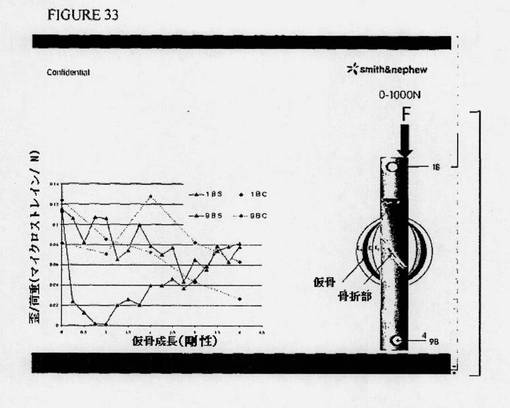
【図34】
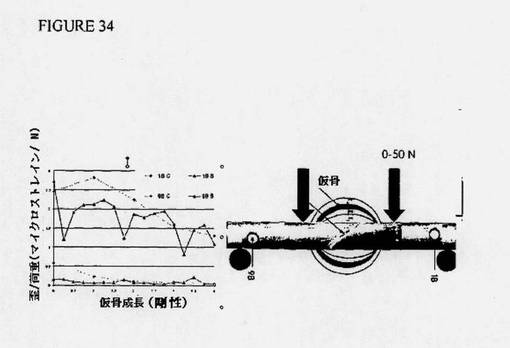
【図35】
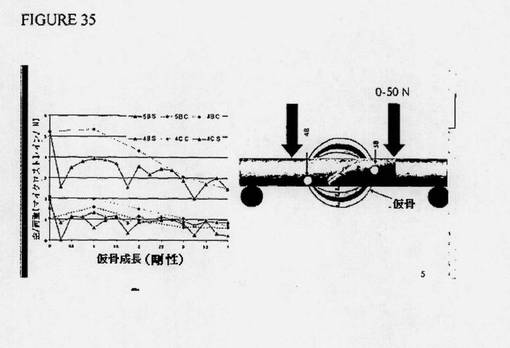
【図36】
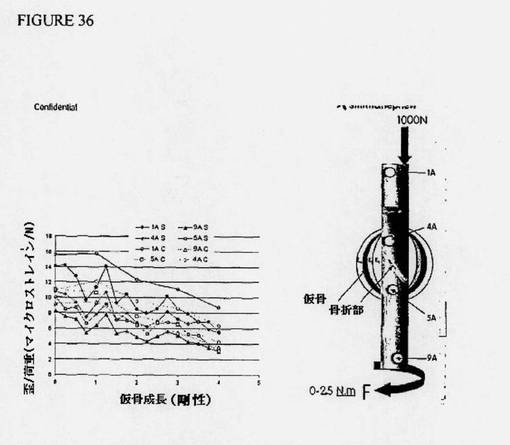
【図37】
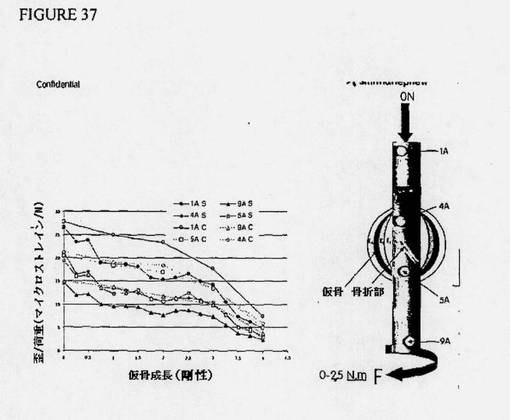
【図38】
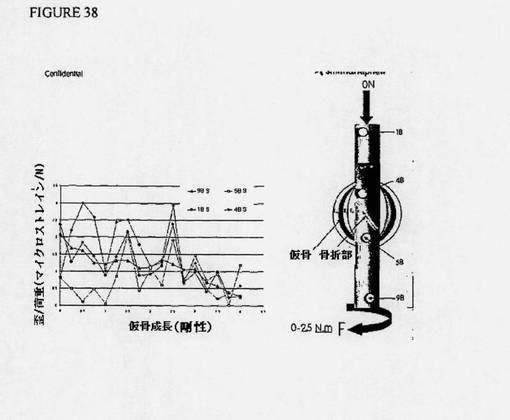
【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27a】
【図27b】
【図27c】
【図27d】
【図28】
【図29】
【図30】
【図31】
【図3】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【公表番号】特表2012−531995(P2012−531995A)
【公表日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2012−519050(P2012−519050)
【出願日】平成22年7月6日(2010.7.6)
【国際出願番号】PCT/GB2010/001298
【国際公開番号】WO2011/004151
【国際公開日】平成23年1月13日(2011.1.13)
【出願人】(391018787)スミス アンド ネフュー ピーエルシー (79)
【氏名又は名称原語表記】SMITH & NEPHEW PUBLIC LIMITED COMPANY
【Fターム(参考)】
【公表日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成22年7月6日(2010.7.6)
【国際出願番号】PCT/GB2010/001298
【国際公開番号】WO2011/004151
【国際公開日】平成23年1月13日(2011.1.13)
【出願人】(391018787)スミス アンド ネフュー ピーエルシー (79)
【氏名又は名称原語表記】SMITH & NEPHEW PUBLIC LIMITED COMPANY
【Fターム(参考)】
[ Back to top ]