
適応空気熱力学エンジンモデル
【課題】 エンジン性能の熱力学的および機械的な影響と、長期使用の部品の効率低下とを明らかにする空気熱力学エンジンモデルを提供する。
【解決手段】 複数のモデルエンジン作動パラメータと、複数の公称部品効率と、対応効率変更関数とを組み込んだ適応空気熱力学エンジンモデル20を開示する。複数のデータポイントに関して、定常状態作動時に、複数のモデルエンジン作動パラメータに対応する複数のエンジン作動パラメータを測定し、対応する効率変更関数を用いて各公称部品効率を繰返し適応させて、各モデルエンジン作動パラメータを上記測定されたエンジン作動パラメータに夫々整合させ、上記適応された公称部品効率に基づいて、実際の部品効率を推定する。推定された実際の部品効率をエンジンモデル20に入力することによって、エンジンモデル20を適応させる。
【解決手段】 複数のモデルエンジン作動パラメータと、複数の公称部品効率と、対応効率変更関数とを組み込んだ適応空気熱力学エンジンモデル20を開示する。複数のデータポイントに関して、定常状態作動時に、複数のモデルエンジン作動パラメータに対応する複数のエンジン作動パラメータを測定し、対応する効率変更関数を用いて各公称部品効率を繰返し適応させて、各モデルエンジン作動パラメータを上記測定されたエンジン作動パラメータに夫々整合させ、上記適応された公称部品効率に基づいて、実際の部品効率を推定する。推定された実際の部品効率をエンジンモデル20に入力することによって、エンジンモデル20を適応させる。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】本発明はガスタービンエンジンの作動に関し、特に、ターボシャフトエンジンの適応空気熱力学エンジンモデルに関する。
【0002】
【従来の技術】従来、ガスタービンエンジンの物理的条件を決定したいときは、試験飛行中に保守係によって、様々なエンジン作動パラメータが測定され記録される。記録されたデータは、エンジンの健全性を決定するために、例えば、タービン翼の磨耗や熱的劣化がエンジン性能に影響を及ぼしているかどうかを決定するために用いられる。しかし、このような測定の手続きは時間が掛り高価である。
【0003】エンジン性能マップは、また、エンジン製造業者によって提供されようが、或いは製造者によって提供されたデータから得られようが、エンジンの性能を長期に渡って予想するために使用されてきた。しかし、このような予想は、エンジン性能マップが部品の磨耗や熱劣化に起因する性能の低下を考慮したものでないので、十分に正確ではない。
【0004】ガスタービンエンジンを動力とする航空機の運転、特に回転翼型航空機の運転は、エンジンの健全性に関するリアルタイムな情報がパイロットに提供されるならば、非常に安全になる。例えば、一定のフライト条件下での運転すなわち操縦をする前に、使用可能な最大出力を知ることができれば、それは非常に有用である。さらに、パイロットは、正確且つリアルタイムなエンジンデータによって、センサの故障を検出でき、その故障にタイムリーに対応できる。この情報は、また、エンジンの日常整備を行なうための最適時間の決定する際にも有用となる。
【0005】
【発明が解決しようとする課題】熱力学エンジンモデルは、故障の発見とエンジンの実態分析のために、エンジン製造者によっても使用される。従来のエンジンモデルは有用であるが、長期に渡るエンジンの性能を正確にモデル化できないという点で、限定されたものとなっている。さらに、従来型のエンジンモデルは、長期に渡る部品の効率低下の原因を明らかにするものでない。また、エンジン性能に関する高次の熱力学的影響や機械的影響を明らかにするものでない。その結果、従来のエンジンモデルは運航する航空機では使用されていない。
【0006】
【課題を解決するための手段】本発明は、新規で有用なターボエンジン用空気熱力学エンジンモデルを指向するものであり、エンジンモデルは、エンジン性能の高次の熱力学的影響および機械的影響と、長期に渡る部品の効率低下とを明らかにすることによって、実際のエンジンを正確に反映するものである。本発明のエンジンモデルは、一度適応すると、最大エンジン出力の使用可能性を予測したり、エンジンセンサの故障を検出し、エンジンセンサが故障した場合はエンジンを制御するために使用される。
【0007】本発明の適応エンジンモデルは、複数のモデルエンジン作動パラメータと、複数の公称エンジン部品の効率と、対応する効率変更関数とを記憶するための手段とを含む。本モデルは、さらに、測定された複数のエンジン作動パラメータを受け取るための手段と、この測定されたエンジン作動パラメータにモデルエンジン作動パラメータを整合させることによって実際のエンジン部品効率を推定するための手段とを含む。好ましくは、上記実際のエンジン部品の効率を推定するための手段は、対応する効率変更関数を用いて公称部品の各効率を繰返し適応させるための手段を含む。
【0008】上記エンジンモデルは、エンジンへ投入される燃料の実際の流れを推定するための手段と、入口案内羽根角変更関数を組み込んでエンジンの実際の入口案内羽根角を推定するための手段とを組み込んでいる。上記燃料の実際の流れを推定するための手段は測定された投入燃料流を繰返し適応させるための燃料流変更関数を含み、上記実際の入口案内羽根角を推定するための手段は、測定された入口案内羽根角を適応させる。
【0009】本発明は、また、ターボシャフト用空気熱力学エンジンモデルを適応させる方法を指向する。この方法は、複数のモデルエンジン作動パラメータと、複数の公称部品効率と、対応する効率変更関数とを組み込んでいる適応空気熱力学エンジンモデルを供与するステップを含んでいる。この方法は、さらに、複数のデータポイントについて、エンジンの定常状態作動時に、上記複数のモデルエンジン作動パラメータに対応する複数のエンジン作動パラメータを測定するステップと、上記対応する効率変更関数を用いて上記公称部品効率の各々を繰返し適応させることによって、上記モデルエンジン作動パラメータの各々を、測定されたそれぞれのエンジン作動パラメータに整合させるステップとを含んでいる。この方法は、さらに、上記適応された公称部品効率に基づいて実際の部品効率を推定するステップと、上記推定された実際の部品効率を上記エンジンモデルに入力するステップとを含んでいる。
【0010】好ましくは、モデルエンジン作動パラメータを上記測定されたそれぞれのエンジン作動パラメータに整合させるステップは、モデルエンジン作動パラメータと上記測定されたエンジン作動パラメータとの間で合成された測定誤差を最小化させるステップを含み、上記合成された測定誤差を最小化させるステップは、予め決められた条件が満たされると終了する。
【0011】上記方法は、複数のデータポイントについて定常状態作動時に投入燃料流を測定し、燃料流変更関数を用いて上記投入燃料流を繰返し適応させ、上記適応された投入燃料流に基づいて上記投入燃料流の実際値を推定することによって、上記エンジンへの燃料流を較正するステップをさらに備え、上記投入燃料流の推定された実際値は上記エンジンモデルへの入力情報である。さらに、上記方法は、複数のデータポイントについて定常状態作動時に入口案内羽根角を測定し、入口案内羽根角変更関数を用いて上記入口案内羽根角を繰返し適応させ、上記適応された入口案内羽根角に基づいて上記入口案内羽根角の実際値を推定することによって、上記エンジンの上記入口案内羽根角を較正するステップをさらに備え、上記入口案内羽根角の推定された実際値は上記エンジンモデルへの入力情報である。
【0012】本発明のこれらの様相あるいは他の様相およびこれらを使用した方法は、以下に記載の図面に関連して為される発明の詳細な説明から、当業者にはより容易に明らかである。
【0013】
【発明の実施の形態】ここに開示された適応空気熱力学エンジンモデルは、如何なる形態のガスタービンエンジンとも共に使用され得る。しかし、以下の記述においては、回転翼型航空機用動力装置として使用される3スプールターボシャフトエンジンについて論及される。このエンジンは、異なる速度で運転するように設計された3つのスプールまたはシャフトを備え、広範な運転範囲に渡ってエンジン性能を最適化するように製造されている。第1のスプ−ルまたはシャフトは、低圧圧縮機(LPC)と低圧タービン(LPT)に結合されて作動される。第2スプールまたはシャフトは、高圧圧縮機(HPC)と高圧タービン(HPT)に結合されて作動される。第3スプールは、出力タービン(PT)に結合されて作動される。
【0014】数個のエンジン作動パラメータが、3スプールターボシャフトエンジンに結合され、それらパラメータは本発明の説明において言及される。これらの作動パラメータは次のものを含んでいる。
T2 エンジン入口温度P2 エンジン入口圧力QS エンジントルク(SHP−シャフトHP)
T4.5 出力タービン入口ガス温度NH 高圧タービンスプール速度NL 低圧タービンスプール速度NP 出力タービンスプール速度P3 圧縮機排出圧力WF 燃料流IGV 入口案内羽根角
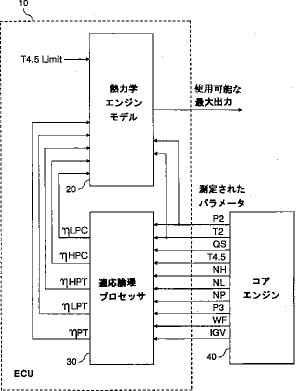
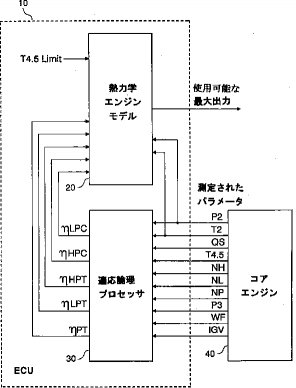
【0015】さて、図面を参照すると、同一の参照番号は、ここに開示された本発明の同一の特徴を識別している。図1には、埋込型適応空気熱力学エンジンモデルの付いた電子制御ユニット10の概略線図が示されている。より詳細には、制御ユニット10はエンジンモデル20を含み、上記エンジンモデル20は、特に複数のモデルエンジン作動パラメータと複数の公称エンジン部品効率という形態のデータを、メモリに記憶している。上記公称エンジン部品効率は次のものを含む。
ηLPC 低圧圧縮機効率ηHPC 高圧圧縮機効率ηHPT 高圧タービン効率ηLPT 低圧タービン効率ηPT 出力タービン効率
【0016】制御ユニット10はさらに適応論理プロセッサ30を含み、適応論理プロセッサ30はエンジン40からの測定された複数の作動パラメータを受け取る。これらの検知されるパラメータは、フライトコンディションが定常状態であるときに、予め決められた時間に、例えば、予め決められた飛行時間の後に、或いは要求が有り次第、複数のデータポイントについて測定される。適応論理プロセッサ30は、モデルエンジン作動パラメータを、測定されたエンジン作動パラメータに整合させるようにプログラムされている。この整合プロセスは適応アルゴリズムを実行することによって達成される。上記適応アルゴリズムは、エンジン製造者が供給する変更関数を用いて、公称エンジン部品効率を繰返し調整すなわち適応させるように設計されている。上記アルゴリズムは、予め決められた条件が満たされると終了する。上記アルゴリズムの出力は、複数の推定された実物部品効率である。次に、これらの値は、実際のエンジン性能を長期に渡って正確に反映させるために、空気熱力学エンジンモデルに入力される。このエンジンモデルは、一度十分に適応されると、故障の検出や調整のために使用でき、センサの故障の場合はエンジンの制御のために使用できる。
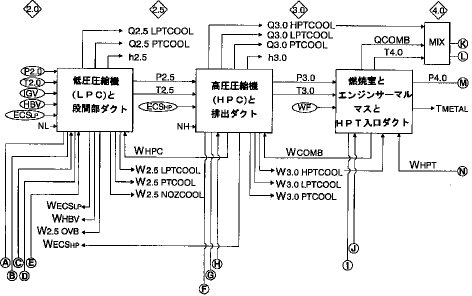
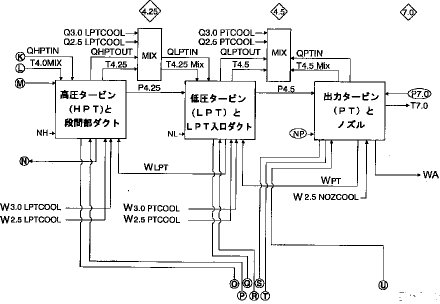
【0017】図2と図3を参照すると、上記適応エンジンモデルのガス経路の流線図が描かれている。このエンジンモデルは、LPCと段部ダクト、HPCと排出ダクト、燃焼室とサーマルマスとHPT入口ダクト、HPTと段部ダクト、出力タービンとノズルを含んでいる。ガス経路は、それぞれが番号で識別された一連のステーションを含み、例えば、出入口の圧力や温度、熱流、空気流やガス流、燃料流、エンタルピーなどのエンジン作動パラメータが、エンジンモデルに入力される。
【0018】ステーション2.0はLPCへの入口を識別する。このステーションでは、モデル入力情報として使用される主要なエンジン作動パラメータは、入口圧力P2.0と入口温度T2.0と入口案内羽根角(IGV)と吹出弁位置(HBV)である。このモデルでは、吹出弁は閉塞位置にあると想定されている。さらに、低圧圧縮機のスプール速度(NL)が上記モデルに入力される。ステーション2.5はHPCへの入口を識別する。このステーションにおける主要な作動パラメータは、圧縮機入口圧力P2.5と圧縮機入口温度T2.5とである。さらに、高圧圧縮機のスプール速度(NH)が上記モデルに入力される。
【0019】ステーション3.0は燃焼室への入口を識別する。このステーションでは、燃焼室の入口圧力P3.0と入口温度T3.0とが、燃料流(WF)とともに、上記エンジンモデルに入力される。ステーション4.0はHPTへの入口を識別する。このステーションにおける主要な作動パラメータは、タービン入口圧力P4.0とスプール速度(NH)である。ステーション4.25はLPTへの入口を識別する。ステーション4.25においては、主要な作動パラメータは入口圧力P4.25とスプール速度(NL)である。ステーション4.5はPTへの入口を識別する。このステーションでは、主要な作動パラメータは入口圧力P4.5とエンジン出力(HP)である。エンジンモデルでの最終ステーションは7.0である。ここでは、主要な作動パラメータはタービン出口圧力P7.0である。
【0020】さて、本発明の適応アルゴリズムを具体化した図2と図3に示す空気熱力学エンジンモデルの適応様態を調べると、エンジンモデルデータを実際のエンジンデータに整合させるために使用される上記適応アルゴリズムは、測定された燃料流(WF)や入口案内羽根角(IGV)を直接使用していない。何故なら、これらの重大な入力情報には、案内羽根の較正許容公差および燃料の種類や温度の変化あるいはバッチ処理における変化のために、不確定さが存在するからである。したがって、この適応アルゴリズムでは、WFとIGVの推定が、エンジン部品効率と共に、鋭意調整されて、エンジンモデルを測定されたエンジン性能に正確に整合させている。
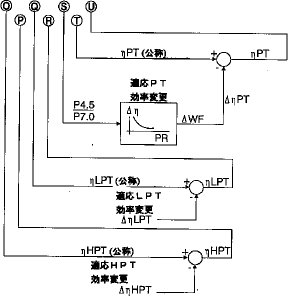
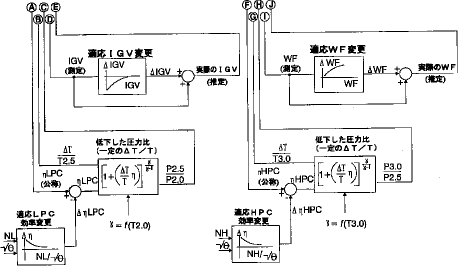
【0021】入口案内羽根角(IGV)の推定は、複数の定常状態のデータポイントを伴う反復プロセスであり、図4に描かれている。それは、相関するΔIGVを得るために、IGVの検知された測定値を適応IGV変更関数に入力することを含む。次に、このΔIGVと測定されたIGVとが加算されて、エンジンの推定されたIGVを得る。この推定は、エンジンモデルに対する入力値として使用される。燃料流(WF)の推定も、反復プロセスであり、相関するΔWFを得るために、WFの検知された測定値を適応WF変更関数に入力することを含んでいる。次に、このΔWFと測定されたWFとが加算されて、エンジンの推定されたWFを得る。この推定された値もまた、エンジンモデルの入力情報として使用される。上記適応変更関数は、熱力学エンジンのデータと経験に基づいて、長期に渡るものとして得られている。
【0022】本質的には、適応プロセスの副産物は、WF測定とIGV測定のオンライン較正にある。特に、WFとIGVに関する測定値と推定値の間の差異すなわちバイアスは、それぞれ、測定されたパラメータWFとIGVの関数として、メモリに記憶される。次に、このバアイスは、パラメータの実際値をより正確に推定するために、測定された値に(符号に依って)加減される。次に、これらの値は、エンジン出力をより正確に計算するために、エンジンモデルに入力情報として使用される。
【0023】図4を引き続き参照すると、WFとIGVの推定が終わると、残る適応パラメータすなわち部品効率が、モデル作動パラメータを測定されたパラメータに整合させるために、繰返し調整される。特に、低圧圧縮機効率(ηLPC)は、熱力学エンジンのデータから得られた適応LPC効率変更関数からΔηLPCを得ることによって、繰返し適応される。上記変更関数は、低圧スプール速度(NL)と温度比(すなわち、海面での標準日温度に対する雰囲気温度の比)θの平方根の形態で、測定されたエンジンのデータを受け取る。上記変更関数からの出力はΔηLPCである。次に、この結果得られた値は、部品効率ηLPCを得るために、モデルすなわち公称のηLPCから減じられる。次に、この値は、モデル量ΔT/T2.5といっしょに、低下した圧力比(DPR)への入力情報として使用される。DPR関数は、熱力学データと経験から、長期に渡るものとして得られている。DPR関数からの出力情報は、P2.5/P2.0の比である。次に、この値はLPCステーションのエンジンモデルに入力される。
【0024】高圧圧縮機効率(ηHPC)は、熱力学エンジンデータと経験とから長期に渡るものとして得られた適応HPC効率変更関数からΔηHPCを得ることにより、繰返し適応される。上記変更関数は、測定されたエンジンのデータを、高圧スプール速度(NH)と温度比θの平方根の形態で受け取る。変更関数からの出力はΔηHPCである。次に、この値は、部品効率ηHPCを得るために、公称のηHPCから減じられる。次に、この結果得られた値は、モデル量ΔT/T3.0といっしょに、DPR関数への入力情報として使用される。この変更関数は、熱力学エンジンデータから長期に渡るものとして得られている。低下圧力比関数からの出力は、P3.0/P2.5の比である。この値は、HPCステーションにおいてエンジンモデルに入力される。
【0025】部品効率ηHPCとηLPCとが繰返し適応されるが、これらの部品効率は長期に渡ると品質が均一に低下することが経験とエンジンデータによって確認されているので、ηLPCやηHPCよりも楽な計算で行なわれる。したがって、ηHPTの適応は、HPTとLPTの公称値から、それぞれ、ΔηHPTとΔηLPTを減ずることによって達成される。その結果得られる出力はηHPTとηLPTである。これらの部品効率は、それぞれ、HPTとLPTステーションにおいてエンジンモデルに入力される。
【0026】出力タービン効率(ηPT)は、熱力学エンジンデータを使用して、長期に渡るものとして得られた適応PT効率変更関数からΔηPTを得ることにより、繰返し適応される。この変更関数は、測定されたエンジンデータを圧力比P4.5/P7.0の形態で受け取る。変更関数からの出力はΔηPTである。次に、この結果得られた値は、部品効率ηPTを得るために公称のηPTから減ぜられる。この部品効率はPTステーションにおいてエンジンモデル内に入力される。
【0027】推定された実際の各部品効率(ηLPC、ηHPC、ηLPT、ηPT)がエンジンモデルに一度入力されると、十分に適応されたエンジンモデルは、実際のエンジンの作動特性を正確に反映することができる。このような場合、例えば最大エンジン出力の使用可能性を正確に予知するために、このエンジンモデルが使用されてもよい。これによって、パイロットは、特定の飛行運動を行なうためにエンジンが十分な出力を出せるかどうかを知ることができる。或いはこの代わりに、適応されたエンジンモデルは、検知されたデータを、適応されたエンジンモデルデータと比較することによって、エンジンセンサの故障を検出する欠陥診断器として使用され得る。例えば、センサが適応されたエンジン値と異なる値を示している場合には、パイロットは故障が検出されたと警告される。さらに、本発明の適応されたエンジンモデルは非常に正確なリアルタイムなデータを提供するので、エンジンモデルはフルオーソリティデジタル電子制御装置(FADEC)に組入れられてもよく、センサが故障した場合には、エンジンを制御するために使用され得る。
【0028】図2乃至図5に示されると共に上文に記載された適応プロセスは、適応アルゴリズムに具体化されている。上記適応は、式1に示されているように、非線形最小二乗最小化問題として公式化されている。

【0029】最小二乗計算手法は、5つの効率変更に関する関数F(η)のグラディエントすなわち感度に基づいている。このグラディエントベクトルは式2に示される。
【0030】式3は、グラディエントベクトルの第1要素項の計算を示す。残る4つの要素項は、同じようにして計算される。
【0031】式3において、式4に示す各項の計算は、エンジンモデルを不安定にするとともに、各i番目の出力条件に対しては定常状態にする。
エンジンモデルサブルーチンは、入力アーギュメントとしての効率ベクトルを有する適応プログラムにより、繰り返し呼び出される。Nデータポイントの収集に続く適応ステップが開始される時に、ηにおいて、Qi、NLi、NHi、T4.5i、P3iが計算されたならば、そのプログラムは、η=[ηLPC+ΔηLPC、ηHPC、ηHPT、ηLPT、ηPT]に対応して、式5を計算する。このステートメントが、他の4つの効率変更関数を固定しているときのみ、ηLPTにおけるエンジンモデルの不安定に対応していることは当業者は容易に理解する。
【0032】グラディエントベクトルの成分が計算された後、急勾配定水準プロセス(steepest decent process)が使用されて、グラディエントベクトルを伴う式6を用いた効率変更ベクトルを更新する。
式6において、Sはステップサイズであり且つスカラー量である。次に、5次元の最小化は、Sを決定するための1次元問題に変換される。Sを計算するために、標準的な計算手法を用いることができる。当業者は認識すべきことは、最小化問題は関数Fの多重計算を伴い、最小化プロセスを完成させるためには、iデータポイント上の性能の変化に依って、多重急勾配定水準ステップが必要になることである。
【0033】下記の3基準すなわち3条件がいずれも満たされると、繰返しは終る。
1) 測定されたパラメータと予知されたモデルパラメータとの間の「誤差」が、所定限界以下である。
2) グラディエントが所定の限界以下である。これは、モデル整合が推定のパラメータに「無反応」となるポイントまで、モデル整合が行なわれたことを意味する。これが生じるのは、測定されたパラメータと予知されたモデルパラメータとの間の差がセンサの測定誤差によって引き起こされるときである。
式8において、グラディエントベクトルの大きさは、個々の成分の平方和の平方根である。
3) パラメータの更新率が特定の限界値に達している。これが生じるのは、モデル整合誤差の方向を表すグラディエント関数が無能であるために、計算されるステップサイズが非常に小さいときである。これは、典型的には、「非可観察性」によって引き起こされる。「非可観察性」とは、エンジンモデルで数学的に表わされるもの以外の要因によって引き起こされる測定パラメータとモデル予知パラメータとの差異である。
【0034】図5乃至図8を参照すると、上述された最小化問題を図示した流れ線図が示されている。図示および簡素化するために、最小化問題はηLPCとηHPTとを含む2次元計算に縮小されている。当業者は、図5乃至図8に示された適応アルゴリズムが、上述のηLPC、ηHPC、ηHPT、ηLPT、ηPTを含む5次元最小化問題に簡単に拡張され得ることは容易に認識する。
【0035】初めに、5つの定常状態のデータポイントが測定され、適応プロセスで使用される各作動パラメータのためのエンジンモデルに入力される。次に、計算プロセスは、ステップ110で始まり、他のエンジン作動パラメータとは無関係に、測定されたシャフトの馬力にエンジンモデルのシャフト馬力を整合させる。これは、燃料流パラメータ(WF)の反復調整によって行なわれ、入口燃料流に対する推定された実際値となる。なお、シャフト馬力とは、エンジントルク(Q)とタービンスプール速度(NP)との積、すなわち(Q×NP)である。
【0036】ステップ120では、他のエンジン作動パラメータとは無関係に、エンジンモデルタービンガス温度T4.5が、測定されたタービンガス温度T4.5に整合される。これは、入口案内羽根角(IGV)の適応調整によって行なわれ、入口案内羽根角の推定された実際の角となる。次に、このWFとIGVの推定された実際の角は、エンジンモデルへの入力情報として使用される。
【0037】ステップ130では、エンジンモデルと実際のエンジンとの間で合成された測定誤差Eは、ηLPCとηHPTの関数として計算される。これは、測定されたデーダポイントについて、SHP、T4.5、P3、NH、NLに対する個々の誤差を加算することによって行なわれる。その結果得られた合成誤差関数は、E(ηLPC、ηHPT)として表される。
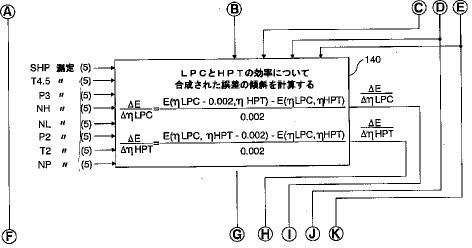
【0038】ステップ140では、関数の偏微分係数すなわち合成された誤差の傾斜は、次式に従って、ηLPCとηHPTに関して計算される。
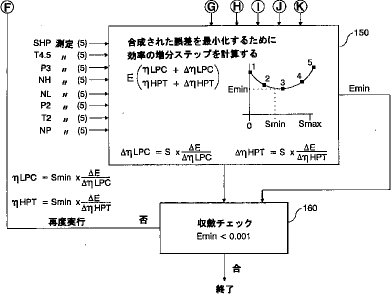
【0039】その後、5つの定常状態データポイントと次式を用いて、誤差関数E(ηLPC+ΔηLPC,ηHPT+ΔηHPT)に対する曲線が作られる。
【0040】次に、合成された誤差関数を最小化するために、急勾配定水準法を用いて、効率におけて増分ステップが計算される。最小化された合成誤差Eminは、次に、ステップ160において収斂チェックを受ける。もしも、最小化された合成誤差Eminが0.001未満であるならば、プレセスは終了し、適応プロセスを終了するために、計算されたηLPCとηHPTとがエンジンモデルに入力される。最小化された合成誤差Eminが0.001以上であるならば、計算されたηLPCとηHPTとを使用して、プロセスが繰り替えされる。ηLPCとηHPTとは次式から得られる。
【0041】このプロセスは、終了条件が満たされる迄、繰返される。
【0042】本発明のエンジンモデルとこのモデルを用いた方法は、好ましい実施形態について記載されてきたが、請求の範囲によって定義された本発明の精神と範囲から逸脱することなく、変更と修正がなされ得ることは、当業者は容易に認識する。例えば、開示されたエンジンモデルは、或るエンジン作動パラメータに関して適応されているが、効率の異なる部品を用いて、他の作動パラメータにも適応され得る。
【図面の簡単な説明】
【図1】 本発明によるエンジンモデルと適応ロジックとを含むエンジンに付随した電子制御ユニットの概略図である。
【図2】 本発明によって形成された3つのスプールターボシャフトエンジンに対する適応エンジンモデルのガス経路信号流れ線図である。
【図3】 本発明によって形成された3つのスプールターボシャフトエンジンに対する適応エンジンモデルのガス経路信号流れ線図である。
【図4】 本発明によって形成された3つのスプールターボシャフトエンジンに対する適応エンジンモデルのガス経路信号流れ線図である。
【図5】 本発明によって形成された3つのスプールターボシャフトエンジンに対する適応エンジンモデルのガス経路信号流れ線図である。
【図6】 本発明のエンジンモデルによって使用される適応アルゴリズムを示す流図である。
【図7】 本発明のエンジンモデルによって使用される適応アルゴリズムを示す流図である。
【図8】 本発明のエンジンモデルによって使用される適応アルゴリズムを示す流図である。
【符号の説明】
20…熱力学エンジンモデル、
30…適応論理プロセッサ、
40…コアエンジン。
【0001】
【発明の属する技術分野】本発明はガスタービンエンジンの作動に関し、特に、ターボシャフトエンジンの適応空気熱力学エンジンモデルに関する。
【0002】
【従来の技術】従来、ガスタービンエンジンの物理的条件を決定したいときは、試験飛行中に保守係によって、様々なエンジン作動パラメータが測定され記録される。記録されたデータは、エンジンの健全性を決定するために、例えば、タービン翼の磨耗や熱的劣化がエンジン性能に影響を及ぼしているかどうかを決定するために用いられる。しかし、このような測定の手続きは時間が掛り高価である。
【0003】エンジン性能マップは、また、エンジン製造業者によって提供されようが、或いは製造者によって提供されたデータから得られようが、エンジンの性能を長期に渡って予想するために使用されてきた。しかし、このような予想は、エンジン性能マップが部品の磨耗や熱劣化に起因する性能の低下を考慮したものでないので、十分に正確ではない。
【0004】ガスタービンエンジンを動力とする航空機の運転、特に回転翼型航空機の運転は、エンジンの健全性に関するリアルタイムな情報がパイロットに提供されるならば、非常に安全になる。例えば、一定のフライト条件下での運転すなわち操縦をする前に、使用可能な最大出力を知ることができれば、それは非常に有用である。さらに、パイロットは、正確且つリアルタイムなエンジンデータによって、センサの故障を検出でき、その故障にタイムリーに対応できる。この情報は、また、エンジンの日常整備を行なうための最適時間の決定する際にも有用となる。
【0005】
【発明が解決しようとする課題】熱力学エンジンモデルは、故障の発見とエンジンの実態分析のために、エンジン製造者によっても使用される。従来のエンジンモデルは有用であるが、長期に渡るエンジンの性能を正確にモデル化できないという点で、限定されたものとなっている。さらに、従来型のエンジンモデルは、長期に渡る部品の効率低下の原因を明らかにするものでない。また、エンジン性能に関する高次の熱力学的影響や機械的影響を明らかにするものでない。その結果、従来のエンジンモデルは運航する航空機では使用されていない。
【0006】
【課題を解決するための手段】本発明は、新規で有用なターボエンジン用空気熱力学エンジンモデルを指向するものであり、エンジンモデルは、エンジン性能の高次の熱力学的影響および機械的影響と、長期に渡る部品の効率低下とを明らかにすることによって、実際のエンジンを正確に反映するものである。本発明のエンジンモデルは、一度適応すると、最大エンジン出力の使用可能性を予測したり、エンジンセンサの故障を検出し、エンジンセンサが故障した場合はエンジンを制御するために使用される。
【0007】本発明の適応エンジンモデルは、複数のモデルエンジン作動パラメータと、複数の公称エンジン部品の効率と、対応する効率変更関数とを記憶するための手段とを含む。本モデルは、さらに、測定された複数のエンジン作動パラメータを受け取るための手段と、この測定されたエンジン作動パラメータにモデルエンジン作動パラメータを整合させることによって実際のエンジン部品効率を推定するための手段とを含む。好ましくは、上記実際のエンジン部品の効率を推定するための手段は、対応する効率変更関数を用いて公称部品の各効率を繰返し適応させるための手段を含む。
【0008】上記エンジンモデルは、エンジンへ投入される燃料の実際の流れを推定するための手段と、入口案内羽根角変更関数を組み込んでエンジンの実際の入口案内羽根角を推定するための手段とを組み込んでいる。上記燃料の実際の流れを推定するための手段は測定された投入燃料流を繰返し適応させるための燃料流変更関数を含み、上記実際の入口案内羽根角を推定するための手段は、測定された入口案内羽根角を適応させる。
【0009】本発明は、また、ターボシャフト用空気熱力学エンジンモデルを適応させる方法を指向する。この方法は、複数のモデルエンジン作動パラメータと、複数の公称部品効率と、対応する効率変更関数とを組み込んでいる適応空気熱力学エンジンモデルを供与するステップを含んでいる。この方法は、さらに、複数のデータポイントについて、エンジンの定常状態作動時に、上記複数のモデルエンジン作動パラメータに対応する複数のエンジン作動パラメータを測定するステップと、上記対応する効率変更関数を用いて上記公称部品効率の各々を繰返し適応させることによって、上記モデルエンジン作動パラメータの各々を、測定されたそれぞれのエンジン作動パラメータに整合させるステップとを含んでいる。この方法は、さらに、上記適応された公称部品効率に基づいて実際の部品効率を推定するステップと、上記推定された実際の部品効率を上記エンジンモデルに入力するステップとを含んでいる。
【0010】好ましくは、モデルエンジン作動パラメータを上記測定されたそれぞれのエンジン作動パラメータに整合させるステップは、モデルエンジン作動パラメータと上記測定されたエンジン作動パラメータとの間で合成された測定誤差を最小化させるステップを含み、上記合成された測定誤差を最小化させるステップは、予め決められた条件が満たされると終了する。
【0011】上記方法は、複数のデータポイントについて定常状態作動時に投入燃料流を測定し、燃料流変更関数を用いて上記投入燃料流を繰返し適応させ、上記適応された投入燃料流に基づいて上記投入燃料流の実際値を推定することによって、上記エンジンへの燃料流を較正するステップをさらに備え、上記投入燃料流の推定された実際値は上記エンジンモデルへの入力情報である。さらに、上記方法は、複数のデータポイントについて定常状態作動時に入口案内羽根角を測定し、入口案内羽根角変更関数を用いて上記入口案内羽根角を繰返し適応させ、上記適応された入口案内羽根角に基づいて上記入口案内羽根角の実際値を推定することによって、上記エンジンの上記入口案内羽根角を較正するステップをさらに備え、上記入口案内羽根角の推定された実際値は上記エンジンモデルへの入力情報である。
【0012】本発明のこれらの様相あるいは他の様相およびこれらを使用した方法は、以下に記載の図面に関連して為される発明の詳細な説明から、当業者にはより容易に明らかである。
【0013】
【発明の実施の形態】ここに開示された適応空気熱力学エンジンモデルは、如何なる形態のガスタービンエンジンとも共に使用され得る。しかし、以下の記述においては、回転翼型航空機用動力装置として使用される3スプールターボシャフトエンジンについて論及される。このエンジンは、異なる速度で運転するように設計された3つのスプールまたはシャフトを備え、広範な運転範囲に渡ってエンジン性能を最適化するように製造されている。第1のスプ−ルまたはシャフトは、低圧圧縮機(LPC)と低圧タービン(LPT)に結合されて作動される。第2スプールまたはシャフトは、高圧圧縮機(HPC)と高圧タービン(HPT)に結合されて作動される。第3スプールは、出力タービン(PT)に結合されて作動される。
【0014】数個のエンジン作動パラメータが、3スプールターボシャフトエンジンに結合され、それらパラメータは本発明の説明において言及される。これらの作動パラメータは次のものを含んでいる。
T2 エンジン入口温度P2 エンジン入口圧力QS エンジントルク(SHP−シャフトHP)
T4.5 出力タービン入口ガス温度NH 高圧タービンスプール速度NL 低圧タービンスプール速度NP 出力タービンスプール速度P3 圧縮機排出圧力WF 燃料流IGV 入口案内羽根角
【0015】さて、図面を参照すると、同一の参照番号は、ここに開示された本発明の同一の特徴を識別している。図1には、埋込型適応空気熱力学エンジンモデルの付いた電子制御ユニット10の概略線図が示されている。より詳細には、制御ユニット10はエンジンモデル20を含み、上記エンジンモデル20は、特に複数のモデルエンジン作動パラメータと複数の公称エンジン部品効率という形態のデータを、メモリに記憶している。上記公称エンジン部品効率は次のものを含む。
ηLPC 低圧圧縮機効率ηHPC 高圧圧縮機効率ηHPT 高圧タービン効率ηLPT 低圧タービン効率ηPT 出力タービン効率
【0016】制御ユニット10はさらに適応論理プロセッサ30を含み、適応論理プロセッサ30はエンジン40からの測定された複数の作動パラメータを受け取る。これらの検知されるパラメータは、フライトコンディションが定常状態であるときに、予め決められた時間に、例えば、予め決められた飛行時間の後に、或いは要求が有り次第、複数のデータポイントについて測定される。適応論理プロセッサ30は、モデルエンジン作動パラメータを、測定されたエンジン作動パラメータに整合させるようにプログラムされている。この整合プロセスは適応アルゴリズムを実行することによって達成される。上記適応アルゴリズムは、エンジン製造者が供給する変更関数を用いて、公称エンジン部品効率を繰返し調整すなわち適応させるように設計されている。上記アルゴリズムは、予め決められた条件が満たされると終了する。上記アルゴリズムの出力は、複数の推定された実物部品効率である。次に、これらの値は、実際のエンジン性能を長期に渡って正確に反映させるために、空気熱力学エンジンモデルに入力される。このエンジンモデルは、一度十分に適応されると、故障の検出や調整のために使用でき、センサの故障の場合はエンジンの制御のために使用できる。
【0017】図2と図3を参照すると、上記適応エンジンモデルのガス経路の流線図が描かれている。このエンジンモデルは、LPCと段部ダクト、HPCと排出ダクト、燃焼室とサーマルマスとHPT入口ダクト、HPTと段部ダクト、出力タービンとノズルを含んでいる。ガス経路は、それぞれが番号で識別された一連のステーションを含み、例えば、出入口の圧力や温度、熱流、空気流やガス流、燃料流、エンタルピーなどのエンジン作動パラメータが、エンジンモデルに入力される。
【0018】ステーション2.0はLPCへの入口を識別する。このステーションでは、モデル入力情報として使用される主要なエンジン作動パラメータは、入口圧力P2.0と入口温度T2.0と入口案内羽根角(IGV)と吹出弁位置(HBV)である。このモデルでは、吹出弁は閉塞位置にあると想定されている。さらに、低圧圧縮機のスプール速度(NL)が上記モデルに入力される。ステーション2.5はHPCへの入口を識別する。このステーションにおける主要な作動パラメータは、圧縮機入口圧力P2.5と圧縮機入口温度T2.5とである。さらに、高圧圧縮機のスプール速度(NH)が上記モデルに入力される。
【0019】ステーション3.0は燃焼室への入口を識別する。このステーションでは、燃焼室の入口圧力P3.0と入口温度T3.0とが、燃料流(WF)とともに、上記エンジンモデルに入力される。ステーション4.0はHPTへの入口を識別する。このステーションにおける主要な作動パラメータは、タービン入口圧力P4.0とスプール速度(NH)である。ステーション4.25はLPTへの入口を識別する。ステーション4.25においては、主要な作動パラメータは入口圧力P4.25とスプール速度(NL)である。ステーション4.5はPTへの入口を識別する。このステーションでは、主要な作動パラメータは入口圧力P4.5とエンジン出力(HP)である。エンジンモデルでの最終ステーションは7.0である。ここでは、主要な作動パラメータはタービン出口圧力P7.0である。
【0020】さて、本発明の適応アルゴリズムを具体化した図2と図3に示す空気熱力学エンジンモデルの適応様態を調べると、エンジンモデルデータを実際のエンジンデータに整合させるために使用される上記適応アルゴリズムは、測定された燃料流(WF)や入口案内羽根角(IGV)を直接使用していない。何故なら、これらの重大な入力情報には、案内羽根の較正許容公差および燃料の種類や温度の変化あるいはバッチ処理における変化のために、不確定さが存在するからである。したがって、この適応アルゴリズムでは、WFとIGVの推定が、エンジン部品効率と共に、鋭意調整されて、エンジンモデルを測定されたエンジン性能に正確に整合させている。
【0021】入口案内羽根角(IGV)の推定は、複数の定常状態のデータポイントを伴う反復プロセスであり、図4に描かれている。それは、相関するΔIGVを得るために、IGVの検知された測定値を適応IGV変更関数に入力することを含む。次に、このΔIGVと測定されたIGVとが加算されて、エンジンの推定されたIGVを得る。この推定は、エンジンモデルに対する入力値として使用される。燃料流(WF)の推定も、反復プロセスであり、相関するΔWFを得るために、WFの検知された測定値を適応WF変更関数に入力することを含んでいる。次に、このΔWFと測定されたWFとが加算されて、エンジンの推定されたWFを得る。この推定された値もまた、エンジンモデルの入力情報として使用される。上記適応変更関数は、熱力学エンジンのデータと経験に基づいて、長期に渡るものとして得られている。
【0022】本質的には、適応プロセスの副産物は、WF測定とIGV測定のオンライン較正にある。特に、WFとIGVに関する測定値と推定値の間の差異すなわちバイアスは、それぞれ、測定されたパラメータWFとIGVの関数として、メモリに記憶される。次に、このバアイスは、パラメータの実際値をより正確に推定するために、測定された値に(符号に依って)加減される。次に、これらの値は、エンジン出力をより正確に計算するために、エンジンモデルに入力情報として使用される。
【0023】図4を引き続き参照すると、WFとIGVの推定が終わると、残る適応パラメータすなわち部品効率が、モデル作動パラメータを測定されたパラメータに整合させるために、繰返し調整される。特に、低圧圧縮機効率(ηLPC)は、熱力学エンジンのデータから得られた適応LPC効率変更関数からΔηLPCを得ることによって、繰返し適応される。上記変更関数は、低圧スプール速度(NL)と温度比(すなわち、海面での標準日温度に対する雰囲気温度の比)θの平方根の形態で、測定されたエンジンのデータを受け取る。上記変更関数からの出力はΔηLPCである。次に、この結果得られた値は、部品効率ηLPCを得るために、モデルすなわち公称のηLPCから減じられる。次に、この値は、モデル量ΔT/T2.5といっしょに、低下した圧力比(DPR)への入力情報として使用される。DPR関数は、熱力学データと経験から、長期に渡るものとして得られている。DPR関数からの出力情報は、P2.5/P2.0の比である。次に、この値はLPCステーションのエンジンモデルに入力される。
【0024】高圧圧縮機効率(ηHPC)は、熱力学エンジンデータと経験とから長期に渡るものとして得られた適応HPC効率変更関数からΔηHPCを得ることにより、繰返し適応される。上記変更関数は、測定されたエンジンのデータを、高圧スプール速度(NH)と温度比θの平方根の形態で受け取る。変更関数からの出力はΔηHPCである。次に、この値は、部品効率ηHPCを得るために、公称のηHPCから減じられる。次に、この結果得られた値は、モデル量ΔT/T3.0といっしょに、DPR関数への入力情報として使用される。この変更関数は、熱力学エンジンデータから長期に渡るものとして得られている。低下圧力比関数からの出力は、P3.0/P2.5の比である。この値は、HPCステーションにおいてエンジンモデルに入力される。
【0025】部品効率ηHPCとηLPCとが繰返し適応されるが、これらの部品効率は長期に渡ると品質が均一に低下することが経験とエンジンデータによって確認されているので、ηLPCやηHPCよりも楽な計算で行なわれる。したがって、ηHPTの適応は、HPTとLPTの公称値から、それぞれ、ΔηHPTとΔηLPTを減ずることによって達成される。その結果得られる出力はηHPTとηLPTである。これらの部品効率は、それぞれ、HPTとLPTステーションにおいてエンジンモデルに入力される。
【0026】出力タービン効率(ηPT)は、熱力学エンジンデータを使用して、長期に渡るものとして得られた適応PT効率変更関数からΔηPTを得ることにより、繰返し適応される。この変更関数は、測定されたエンジンデータを圧力比P4.5/P7.0の形態で受け取る。変更関数からの出力はΔηPTである。次に、この結果得られた値は、部品効率ηPTを得るために公称のηPTから減ぜられる。この部品効率はPTステーションにおいてエンジンモデル内に入力される。
【0027】推定された実際の各部品効率(ηLPC、ηHPC、ηLPT、ηPT)がエンジンモデルに一度入力されると、十分に適応されたエンジンモデルは、実際のエンジンの作動特性を正確に反映することができる。このような場合、例えば最大エンジン出力の使用可能性を正確に予知するために、このエンジンモデルが使用されてもよい。これによって、パイロットは、特定の飛行運動を行なうためにエンジンが十分な出力を出せるかどうかを知ることができる。或いはこの代わりに、適応されたエンジンモデルは、検知されたデータを、適応されたエンジンモデルデータと比較することによって、エンジンセンサの故障を検出する欠陥診断器として使用され得る。例えば、センサが適応されたエンジン値と異なる値を示している場合には、パイロットは故障が検出されたと警告される。さらに、本発明の適応されたエンジンモデルは非常に正確なリアルタイムなデータを提供するので、エンジンモデルはフルオーソリティデジタル電子制御装置(FADEC)に組入れられてもよく、センサが故障した場合には、エンジンを制御するために使用され得る。
【0028】図2乃至図5に示されると共に上文に記載された適応プロセスは、適応アルゴリズムに具体化されている。上記適応は、式1に示されているように、非線形最小二乗最小化問題として公式化されている。
【0029】最小二乗計算手法は、5つの効率変更に関する関数F(η)のグラディエントすなわち感度に基づいている。このグラディエントベクトルは式2に示される。
【0030】式3は、グラディエントベクトルの第1要素項の計算を示す。残る4つの要素項は、同じようにして計算される。
【0031】式3において、式4に示す各項の計算は、エンジンモデルを不安定にするとともに、各i番目の出力条件に対しては定常状態にする。
エンジンモデルサブルーチンは、入力アーギュメントとしての効率ベクトルを有する適応プログラムにより、繰り返し呼び出される。Nデータポイントの収集に続く適応ステップが開始される時に、ηにおいて、Qi、NLi、NHi、T4.5i、P3iが計算されたならば、そのプログラムは、η=[ηLPC+ΔηLPC、ηHPC、ηHPT、ηLPT、ηPT]に対応して、式5を計算する。このステートメントが、他の4つの効率変更関数を固定しているときのみ、ηLPTにおけるエンジンモデルの不安定に対応していることは当業者は容易に理解する。
【0032】グラディエントベクトルの成分が計算された後、急勾配定水準プロセス(steepest decent process)が使用されて、グラディエントベクトルを伴う式6を用いた効率変更ベクトルを更新する。
式6において、Sはステップサイズであり且つスカラー量である。次に、5次元の最小化は、Sを決定するための1次元問題に変換される。Sを計算するために、標準的な計算手法を用いることができる。当業者は認識すべきことは、最小化問題は関数Fの多重計算を伴い、最小化プロセスを完成させるためには、iデータポイント上の性能の変化に依って、多重急勾配定水準ステップが必要になることである。
【0033】下記の3基準すなわち3条件がいずれも満たされると、繰返しは終る。
1) 測定されたパラメータと予知されたモデルパラメータとの間の「誤差」が、所定限界以下である。
2) グラディエントが所定の限界以下である。これは、モデル整合が推定のパラメータに「無反応」となるポイントまで、モデル整合が行なわれたことを意味する。これが生じるのは、測定されたパラメータと予知されたモデルパラメータとの間の差がセンサの測定誤差によって引き起こされるときである。
式8において、グラディエントベクトルの大きさは、個々の成分の平方和の平方根である。
3) パラメータの更新率が特定の限界値に達している。これが生じるのは、モデル整合誤差の方向を表すグラディエント関数が無能であるために、計算されるステップサイズが非常に小さいときである。これは、典型的には、「非可観察性」によって引き起こされる。「非可観察性」とは、エンジンモデルで数学的に表わされるもの以外の要因によって引き起こされる測定パラメータとモデル予知パラメータとの差異である。
【0034】図5乃至図8を参照すると、上述された最小化問題を図示した流れ線図が示されている。図示および簡素化するために、最小化問題はηLPCとηHPTとを含む2次元計算に縮小されている。当業者は、図5乃至図8に示された適応アルゴリズムが、上述のηLPC、ηHPC、ηHPT、ηLPT、ηPTを含む5次元最小化問題に簡単に拡張され得ることは容易に認識する。
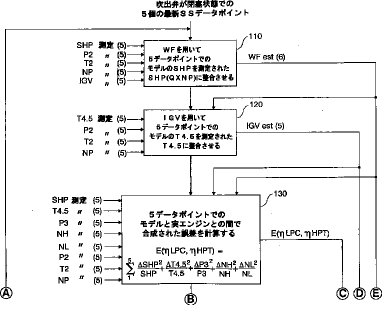
【0035】初めに、5つの定常状態のデータポイントが測定され、適応プロセスで使用される各作動パラメータのためのエンジンモデルに入力される。次に、計算プロセスは、ステップ110で始まり、他のエンジン作動パラメータとは無関係に、測定されたシャフトの馬力にエンジンモデルのシャフト馬力を整合させる。これは、燃料流パラメータ(WF)の反復調整によって行なわれ、入口燃料流に対する推定された実際値となる。なお、シャフト馬力とは、エンジントルク(Q)とタービンスプール速度(NP)との積、すなわち(Q×NP)である。
【0036】ステップ120では、他のエンジン作動パラメータとは無関係に、エンジンモデルタービンガス温度T4.5が、測定されたタービンガス温度T4.5に整合される。これは、入口案内羽根角(IGV)の適応調整によって行なわれ、入口案内羽根角の推定された実際の角となる。次に、このWFとIGVの推定された実際の角は、エンジンモデルへの入力情報として使用される。
【0037】ステップ130では、エンジンモデルと実際のエンジンとの間で合成された測定誤差Eは、ηLPCとηHPTの関数として計算される。これは、測定されたデーダポイントについて、SHP、T4.5、P3、NH、NLに対する個々の誤差を加算することによって行なわれる。その結果得られた合成誤差関数は、E(ηLPC、ηHPT)として表される。
【0038】ステップ140では、関数の偏微分係数すなわち合成された誤差の傾斜は、次式に従って、ηLPCとηHPTに関して計算される。
【0039】その後、5つの定常状態データポイントと次式を用いて、誤差関数E(ηLPC+ΔηLPC,ηHPT+ΔηHPT)に対する曲線が作られる。
【0040】次に、合成された誤差関数を最小化するために、急勾配定水準法を用いて、効率におけて増分ステップが計算される。最小化された合成誤差Eminは、次に、ステップ160において収斂チェックを受ける。もしも、最小化された合成誤差Eminが0.001未満であるならば、プレセスは終了し、適応プロセスを終了するために、計算されたηLPCとηHPTとがエンジンモデルに入力される。最小化された合成誤差Eminが0.001以上であるならば、計算されたηLPCとηHPTとを使用して、プロセスが繰り替えされる。ηLPCとηHPTとは次式から得られる。
【0041】このプロセスは、終了条件が満たされる迄、繰返される。
【0042】本発明のエンジンモデルとこのモデルを用いた方法は、好ましい実施形態について記載されてきたが、請求の範囲によって定義された本発明の精神と範囲から逸脱することなく、変更と修正がなされ得ることは、当業者は容易に認識する。例えば、開示されたエンジンモデルは、或るエンジン作動パラメータに関して適応されているが、効率の異なる部品を用いて、他の作動パラメータにも適応され得る。
【図面の簡単な説明】
【図1】 本発明によるエンジンモデルと適応ロジックとを含むエンジンに付随した電子制御ユニットの概略図である。
【図2】 本発明によって形成された3つのスプールターボシャフトエンジンに対する適応エンジンモデルのガス経路信号流れ線図である。
【図3】 本発明によって形成された3つのスプールターボシャフトエンジンに対する適応エンジンモデルのガス経路信号流れ線図である。
【図4】 本発明によって形成された3つのスプールターボシャフトエンジンに対する適応エンジンモデルのガス経路信号流れ線図である。
【図5】 本発明によって形成された3つのスプールターボシャフトエンジンに対する適応エンジンモデルのガス経路信号流れ線図である。
【図6】 本発明のエンジンモデルによって使用される適応アルゴリズムを示す流図である。
【図7】 本発明のエンジンモデルによって使用される適応アルゴリズムを示す流図である。
【図8】 本発明のエンジンモデルによって使用される適応アルゴリズムを示す流図である。
【符号の説明】
20…熱力学エンジンモデル、
30…適応論理プロセッサ、
40…コアエンジン。
【特許請求の範囲】
【請求項1】 a)複数のモデルエンジン作動パラメータと、複数の公称部品効率と、対応する効率変更関数とを組み込んでいる適応空気熱力学エンジンモデルを供与するステップと、b)複数のデータポイントについて、エンジンの定常状態作動時に、上記複数のモデルエンジン作動パラメータに対応する複数のエンジン作動パラメータを測定するステップと、c)上記対応する効率変更関数を用いて上記公称部品効率の各々を繰返し適応させることによって、上記モデルエンジン作動パラメータの各々を、測定されたそれぞれのエンジン作動パラメータに整合させるステップと、d)上記適応された公称部品効率に基づいて実際の部品効率を推定するステップと、e)上記推定された実際の部品効率を上記エンジンモデルに入力するステップとを備えていることを特徴とするターボシャフトエンジンの空気熱力学エンジンモデルを適応させる方法。
【請求項2】 請求項1に記載の空気熱力学エンジンモデルを適応させる方法において、上記適応されたエンジンモデルに基づいて、最大エンジン出力の使用可能性を予測するステップをさらに備えていることを特徴とする空気熱力学エンジンモデルを適応させる方法。
【請求項3】 請求項1に記載の空気熱力学エンジンモデルを適応させる方法において、上記適応されたエンジンモデルに基づいて、エンジンセンサの故障を検出するステップをさらに備えていることを特徴とする空気熱力学エンジンモデルを適応させる方法。
【請求項4】 請求項1に記載の空気熱力学エンジンモデルを適応させる方法において、上記適応されたエンジンモデルに基づいて、上記エンジンを制御するステップをさらに備えていることを特徴とする空気熱力学エンジンモデルを適応させる方法。
【請求項5】 請求項1に記載の空気熱力学エンジンモデルを適応させる方法において、上記モデルエンジン作動パラメータを上記測定されたそれぞれのエンジン作動パラメータに整合させるステップは、上記モデルエンジン作動パラメータと上記測定されたエンジン作動パラメータとの間で合成された測定誤差を最小化させるステップを含んでいることを特徴とする空気熱力学エンジンモデルを適応させる方法。
【請求項6】 請求項5に記載の空気熱力学エンジンモデルを適応させる方法において、上記合成された測定誤差を最小化させるステップは、予め決められた条件が満たされると、終了することを特徴とする空気熱力学エンジンモデルを適応させる方法。
【請求項7】 請求項1に記載の空気熱力学エンジンモデルを適応させる方法において、複数のデータポイントについて定常状態作動時に投入燃料流を測定し、燃料流変更関数を用いて上記投入燃料流を繰返し適応させ、上記適応された投入燃料流に基づいて上記投入燃料流の実際値を推定することによって、上記エンジンへの燃料流を較正するステップをさらに備え、上記投入燃料流の推定された実際値は上記エンジンモデルへの入力情報であることを特徴とする空気熱力学エンジンモデルを適応させる方法。
【請求項8】 請求項1に記載の空気熱力学エンジンモデルを適応させる方法において、複数のデータポイントについて定常状態作動時に入口案内羽根角を測定し、入口案内羽根角変更関数を用いて上記入口案内羽根角を繰返し適応させ、上記適応された入口案内羽根角に基づいて上記入口案内羽根角の実際値を推定することによって、上記エンジンの上記入口案内羽根角を較正するステップをさらに備え、上記入口案内羽根角の推定された実際値は上記エンジンモデルへの入力情報であることを特徴とする空気熱力学エンジンモデルを適応させる方法。
【請求項9】 a)複数のモデルエンジン作動パラメータと、複数の公称エンジン部品効率と、対応する効率変更関数とを記憶するための手段と、b)複数の測定されたエンジン作動パラメータを受け取るための手段と、c)上記モデルエンジン作動パラメータを上記測定されたエンジン作動パラメータに整合させることによって実際のエンジン部品効率を推定するための手段とを備えていることを特徴とするターボシャフトエンジンの適応空気熱力学エンジンモデル。
【請求項10】 請求項9に記載の適応空気熱力学エンジンモデルにおいて、上記実際のエンジン部品効率を推定するための手段は、対応する効率変更関数を用いて上記公称部品効率の各々を繰返し適応させるための手段を含んでいることを特徴とする適応空気熱力学エンジンモデル。
【請求項11】 請求項9に記載の適応空気熱力学エンジンモデルにおいて、上記エンジンへの実際の投入燃料流を推定するための手段をさらに備えていることを特徴とする適応空気熱力学エンジンモデル。
【請求項12】 請求項11に記載の適応空気熱力学エンジンモデルにおいて、上記エンジンへの実際の投入燃料流を推定するための手段は、測定された投入燃料流を繰返し適応させるための燃料流変更関数を含んでいることを特徴とする適応空気熱力学エンジンモデル。
【請求項13】 請求項9に記載の適応空気熱力学エンジンモデルにおいて、上記エンジンの実際の入口案内羽根角を推定するための手段をさらに備えていることを特徴とする適応空気熱力学エンジンモデル。
【請求項14】 請求項13に記載の適応空気熱力学エンジンモデルにおいて、上記エンジンの実際の入口案内羽根角を推定するための手段は、測定された入口案内羽根の角度を繰返し適応させるための入口案内羽根変更関数を含んでいることを特徴とする適応空気熱力学エンジンモデル。
【請求項1】 a)複数のモデルエンジン作動パラメータと、複数の公称部品効率と、対応する効率変更関数とを組み込んでいる適応空気熱力学エンジンモデルを供与するステップと、b)複数のデータポイントについて、エンジンの定常状態作動時に、上記複数のモデルエンジン作動パラメータに対応する複数のエンジン作動パラメータを測定するステップと、c)上記対応する効率変更関数を用いて上記公称部品効率の各々を繰返し適応させることによって、上記モデルエンジン作動パラメータの各々を、測定されたそれぞれのエンジン作動パラメータに整合させるステップと、d)上記適応された公称部品効率に基づいて実際の部品効率を推定するステップと、e)上記推定された実際の部品効率を上記エンジンモデルに入力するステップとを備えていることを特徴とするターボシャフトエンジンの空気熱力学エンジンモデルを適応させる方法。
【請求項2】 請求項1に記載の空気熱力学エンジンモデルを適応させる方法において、上記適応されたエンジンモデルに基づいて、最大エンジン出力の使用可能性を予測するステップをさらに備えていることを特徴とする空気熱力学エンジンモデルを適応させる方法。
【請求項3】 請求項1に記載の空気熱力学エンジンモデルを適応させる方法において、上記適応されたエンジンモデルに基づいて、エンジンセンサの故障を検出するステップをさらに備えていることを特徴とする空気熱力学エンジンモデルを適応させる方法。
【請求項4】 請求項1に記載の空気熱力学エンジンモデルを適応させる方法において、上記適応されたエンジンモデルに基づいて、上記エンジンを制御するステップをさらに備えていることを特徴とする空気熱力学エンジンモデルを適応させる方法。
【請求項5】 請求項1に記載の空気熱力学エンジンモデルを適応させる方法において、上記モデルエンジン作動パラメータを上記測定されたそれぞれのエンジン作動パラメータに整合させるステップは、上記モデルエンジン作動パラメータと上記測定されたエンジン作動パラメータとの間で合成された測定誤差を最小化させるステップを含んでいることを特徴とする空気熱力学エンジンモデルを適応させる方法。
【請求項6】 請求項5に記載の空気熱力学エンジンモデルを適応させる方法において、上記合成された測定誤差を最小化させるステップは、予め決められた条件が満たされると、終了することを特徴とする空気熱力学エンジンモデルを適応させる方法。
【請求項7】 請求項1に記載の空気熱力学エンジンモデルを適応させる方法において、複数のデータポイントについて定常状態作動時に投入燃料流を測定し、燃料流変更関数を用いて上記投入燃料流を繰返し適応させ、上記適応された投入燃料流に基づいて上記投入燃料流の実際値を推定することによって、上記エンジンへの燃料流を較正するステップをさらに備え、上記投入燃料流の推定された実際値は上記エンジンモデルへの入力情報であることを特徴とする空気熱力学エンジンモデルを適応させる方法。
【請求項8】 請求項1に記載の空気熱力学エンジンモデルを適応させる方法において、複数のデータポイントについて定常状態作動時に入口案内羽根角を測定し、入口案内羽根角変更関数を用いて上記入口案内羽根角を繰返し適応させ、上記適応された入口案内羽根角に基づいて上記入口案内羽根角の実際値を推定することによって、上記エンジンの上記入口案内羽根角を較正するステップをさらに備え、上記入口案内羽根角の推定された実際値は上記エンジンモデルへの入力情報であることを特徴とする空気熱力学エンジンモデルを適応させる方法。
【請求項9】 a)複数のモデルエンジン作動パラメータと、複数の公称エンジン部品効率と、対応する効率変更関数とを記憶するための手段と、b)複数の測定されたエンジン作動パラメータを受け取るための手段と、c)上記モデルエンジン作動パラメータを上記測定されたエンジン作動パラメータに整合させることによって実際のエンジン部品効率を推定するための手段とを備えていることを特徴とするターボシャフトエンジンの適応空気熱力学エンジンモデル。
【請求項10】 請求項9に記載の適応空気熱力学エンジンモデルにおいて、上記実際のエンジン部品効率を推定するための手段は、対応する効率変更関数を用いて上記公称部品効率の各々を繰返し適応させるための手段を含んでいることを特徴とする適応空気熱力学エンジンモデル。
【請求項11】 請求項9に記載の適応空気熱力学エンジンモデルにおいて、上記エンジンへの実際の投入燃料流を推定するための手段をさらに備えていることを特徴とする適応空気熱力学エンジンモデル。
【請求項12】 請求項11に記載の適応空気熱力学エンジンモデルにおいて、上記エンジンへの実際の投入燃料流を推定するための手段は、測定された投入燃料流を繰返し適応させるための燃料流変更関数を含んでいることを特徴とする適応空気熱力学エンジンモデル。
【請求項13】 請求項9に記載の適応空気熱力学エンジンモデルにおいて、上記エンジンの実際の入口案内羽根角を推定するための手段をさらに備えていることを特徴とする適応空気熱力学エンジンモデル。
【請求項14】 請求項13に記載の適応空気熱力学エンジンモデルにおいて、上記エンジンの実際の入口案内羽根角を推定するための手段は、測定された入口案内羽根の角度を繰返し適応させるための入口案内羽根変更関数を含んでいることを特徴とする適応空気熱力学エンジンモデル。
【図1】

【図5】
【図2】
【図3】
【図4】
【図6】
【図7】
【図8】
【図5】
【図2】
【図3】
【図4】
【図6】
【図7】
【図8】
【公開番号】特開2003−129866(P2003−129866A)
【公開日】平成15年5月8日(2003.5.8)
【国際特許分類】
【出願番号】特願2002−277241(P2002−277241)
【出願日】平成14年9月24日(2002.9.24)
【出願人】(501332378)コルテック・インダストリーズ・インコーポレイテッド (1)
【氏名又は名称原語表記】Coltec Industries, Inc.
【Fターム(参考)】
【公開日】平成15年5月8日(2003.5.8)
【国際特許分類】
【出願日】平成14年9月24日(2002.9.24)
【出願人】(501332378)コルテック・インダストリーズ・インコーポレイテッド (1)
【氏名又は名称原語表記】Coltec Industries, Inc.
【Fターム(参考)】
[ Back to top ]