
選別機
【課題】 設置場所のレイアウトに柔軟に対応する。
【解決手段】 色彩選別機10では、供給ホッパ14が第1昇降機16に取り付けられた第1態様と、供給ホッパ14が第2昇降機52に取り付けられた第2態様と、の何れの場合でも、穀粒Gを2回選別することができるため、第1昇降機16及び第2昇降機52の何れに供給ホッパ14を取り付けてもよい。したがって、第1昇降機16に供給ホッパ14を取り付けるか第2昇降機52に供給ホッパ14を取り付けるかを選択することができる。しかも、操作パネル64は、色彩選別機10の前面上部の他に、色彩選別機10の右面上部及び左面上部にも設置可能にされている。このため、色彩選別機10の設置場所のレイアウトに柔軟に対応できる。
【解決手段】 色彩選別機10では、供給ホッパ14が第1昇降機16に取り付けられた第1態様と、供給ホッパ14が第2昇降機52に取り付けられた第2態様と、の何れの場合でも、穀粒Gを2回選別することができるため、第1昇降機16及び第2昇降機52の何れに供給ホッパ14を取り付けてもよい。したがって、第1昇降機16に供給ホッパ14を取り付けるか第2昇降機52に供給ホッパ14を取り付けるかを選択することができる。しかも、操作パネル64は、色彩選別機10の前面上部の他に、色彩選別機10の右面上部及び左面上部にも設置可能にされている。このため、色彩選別機10の設置場所のレイアウトに柔軟に対応できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、粒体を選別する選別機に関する。
【背景技術】
【0002】
色彩選別機としては、原料供給ホッパに投入された穀粒を良品と不良品とに選別するものがある(例えば、特許文献1参照)。
【0003】
しかしながら、この色彩選別機では、外側に突出して設けられた原料供給ホッパの設置位置を変更できない。このため、色彩選別機の設置場所のレイアウトに対応できない場合がある。
【特許文献1】特開2003−156447公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は上記事実を考慮し、設置場所のレイアウトに柔軟に対応できる選別機を得ることが目的である。
【課題を解決するための手段】
【0005】
請求項1に記載の選別機は、粒体が投入される投入部と、供給された粒体を搬送可能にされ、前記投入部が取り付けられた際に前記投入部へ投入された粒体が供給される第1搬送手段と、供給された粒体を搬送可能にされ、前記投入部が取り付けられた際に前記投入部へ投入された粒体が供給される第2搬送手段と、前記第1搬送手段及び第2搬送手段により搬送された粒体を選別可能にされた選別手段と、前記選別手段により選別された粒体を搬送して前記投入部からの粒体が供給されない前記第1搬送手段及び第2搬送手段の何れか一方へ供給する搬送手段と、を備えている。
【0006】
請求項2に記載の選別機は、請求項1に記載の選別機において、周壁に設置されると共に、設置位置を変更可能にされ、設定操作及び制御操作の少なくとも一方を可能にされた操作部を備えた、ことを特徴としている。
【発明の効果】
【0007】
請求項1に記載の選別機では、第1搬送手段に投入部が取り付けられて投入部へ投入された粒体が第1搬送手段へ供給される場合に、第1搬送手段が粒体を搬送して、選別手段が粒体を選別する。さらに、搬送手段が、選別手段により選別された粒体を搬送して、投入部からの粒体が供給されない第2搬送手段へ供給することで、第2搬送手段が粒体を搬送して、選別手段が粒体を選別する。このため、粒体を2回選別することができる。
【0008】
一方、第2搬送手段に投入部が取り付けられて投入部へ投入された粒体が第2搬送手段へ供給される場合に、第2搬送手段が粒体を搬送して、選別手段が粒体を選別する。さらに、搬送手段が、選別手段により選別された粒体を搬送して、投入部からの粒体が供給されない第1搬送手段へ供給することで、第1搬送手段が粒体を搬送して、選別手段が粒体を選別する。このため、粒体を2回選別することができる。
【0009】
これにより、第1搬送手段及び第2搬送手段の何れに投入部を取り付けても、粒体を2回選別することができる。したがって、第1搬送手段に投入部を取り付けるか第2搬送手段に投入部を取り付けるかを選択することができ、選別機の設置場所のレイアウトに柔軟に対応することができる。
【0010】
請求項2に記載の選別機では、周壁に操作部が設置されており、操作部において設定操作及び制御操作の少なくとも一方が可能にされている。
【0011】
ここで、操作部の設置位置が変更可能にされている。このため、選別機の設置場所のレイアウトに一層柔軟に対応することができる。
【発明を実施するための最良の形態】
【0012】
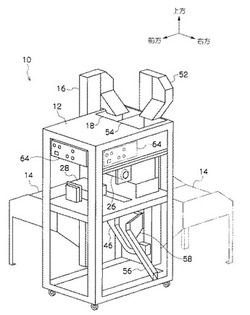
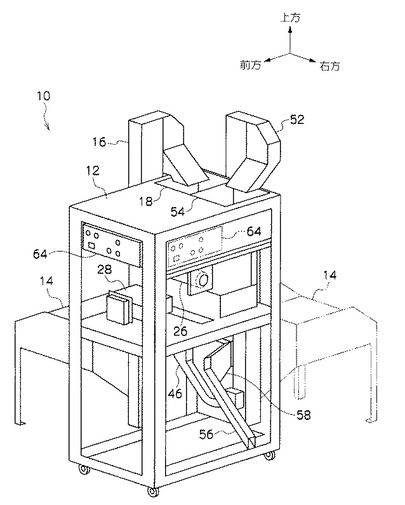
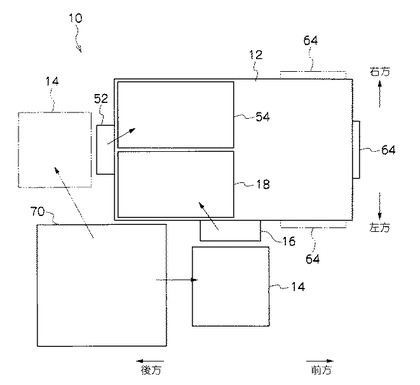
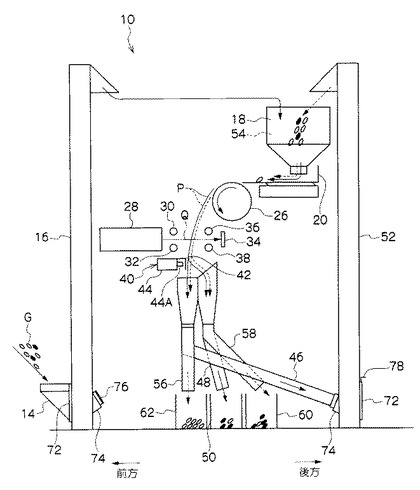
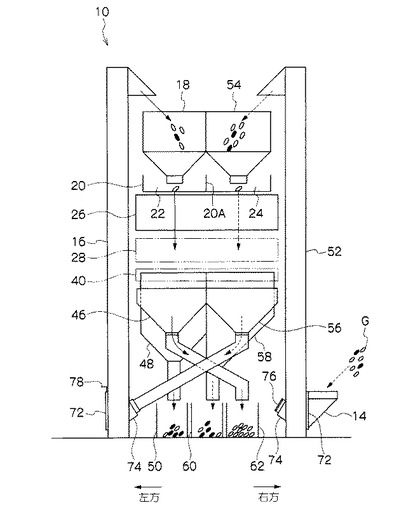
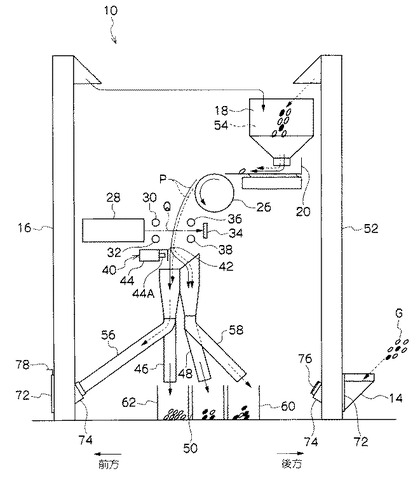
図1には、本発明の実施の形態に係る選別機としての色彩選別機10が前斜め右側から見た斜視図にて示されており、図2には、色彩選別機10が上側から見た平面図にて示されている。さらに、図3には、色彩選別機10の第1態様が前側から見た模式図にて示されており、図4には、色彩選別機10の第1態様が右側から見た模式図にて示されている。
【0013】
本発明の実施の形態に係る色彩選別機10は、略直方体状にされており、色彩選別機10の全周面は、図1及び図2に一部図示する周壁としてのカバー12に覆われている。
【0014】
色彩選別機10の特に左側かつ後側の角部外側には、穀粒投入手段としての穀粒投入機70(例えば精米機又は脱ぷ機)を設けることができ、穀粒投入機70から下記供給ホッパ14に、粒体としての穀粒G(白米、玄米等の米粒の他大豆等も含む)を投入することができる。
【0015】
色彩選別機10の左側には、下側部の外側において、投入部としての漏斗状の供給ホッパ14が設けられており、供給ホッパ14の排出口(下側開口)は供給ホッパ14の右側壁下部に形成されている。供給ホッパ14の右側壁外面には、排出口の前後方向両側において、スライド板(図示省略)が突出された状態で設けられており、スライド板は、断面L字形板状にされて、先端側部分が排出口とは反対側へ突出されている。
【0016】
色彩選別機10の左面外側には、供給ホッパ14よりも内側において、第1搬送手段(第1揚粒手段)としての第1昇降機16が設けられており、第1昇降機16の左面下端には、供給口(図示省略)が設けられている。第1昇降機16の左面下端には、供給口の前後方向両側において、取付板72が突出された状態で設けられており、取付板72は、断面L字形板状にされて、先端側部分が供給口側へ突出されている。第1昇降機16の左面下端には、供給口の下側において、ストッパ(図示省略)が設けられており、ストッパは、第1昇降機16の左面から左方へ突出されている。
【0017】
ここで、第1昇降機16の左面に対し供給ホッパ14の右側壁が上側から下側へスライドされて、供給ホッパ14の一対のスライド板が第1昇降機16の一対の取付板72内に挿入されると共に、供給ホッパ14がストッパに当接されることで、第1昇降機16の左面下端に供給ホッパ14が取り付けられて、供給ホッパ14の排出口が第1昇降機16の供給口に連通されている。これにより、供給ホッパ14に、上側から、穀粒Gが投入されることで、色彩選別機10に穀粒Gが供給され、かつ、供給ホッパ14へ投入された穀粒Gが、供給ホッパ14の排出口及び第1昇降機16の供給口を介して第1昇降機16の下端に供給されて、第1昇降機16によって第1昇降機16の上端まで搬送される。
【0018】
第1昇降機16の右面下端には、筒状の搬送筒74が設けられており、搬送筒74は、基端開口が第1昇降機16の下端内に連通されると共に、先端開口が色彩選別機10内に配置されている。搬送筒74の先端開口は、第1閉鎖手段としての閉鎖蓋76によって閉鎖されており、これにより、第1昇降機16の下端に供給された穀粒Gが搬送筒74の先端開口から排出されることが防止されている。
【0019】
色彩選別機10の上部には、左部後側において、第1供給手段としての略矩形筒状の第1タンク18が設けられており、第1タンク18には、第1昇降機16の上端まで搬送された穀粒Gが上側から供給される。また、第1タンク18の下部は、漏斗状にされている。
【0020】
色彩選別機10の後部には、第1タンク18よりも下側において、送出手段としての振動フィーダ20(直進フィーダ)が設けられており、振動フィーダ20のトラフ(盆)は、上面及び前面が開放された略直方体箱状にされている。振動フィーダ20のトラフ内には、仕切壁20Aが設けられており、仕切壁20Aは振動フィーダ20のトラフ内を左側の第1送出部22と右側の第2送出部24とに左右方向中央で仕切っている。第1送出部22の底面直上には、第1タンク18の下端が配置されており、第1送出部22の底面と第1タンク18の下端とは僅かに離間している。振動フィーダ20のトラフは、底壁上面(第1送出部22及び第2送出部24の底面)が前後方向へ往復振動されており、第1タンク18に供給されて第1タンク18の下端から第1送出部22の底面へ流下した穀粒Gが、振動されつつ整列されながら(均一に散乱されながら)、第1送出部22の底面を後側から前側へ送出されて、第1送出部22の前端から所定量ずつ流下される。
【0021】
振動フィーダ20の前側(下流側)には、繰出手段としての断面外形円状の繰出ロール26が設けられている。繰出ロール26は上側が後側から前側へ向かう方向へ中心軸周りに回転されており、第1送出部22の前端から流下した穀粒G及び後述の如く第2送出部24の前端から流下した穀粒Gが、繰出ロール26によって繰り出されて、繰出ロール26の前側へ自由落下軌道Pに沿って自由落下する。なお、繰出ロール26の周面は、穀粒Gがあまり滑らない構成にされている。
【0022】
繰出ロール26の下方には、穀粒Gの繰出ロール26からの自由落下軌道Pの前側(後側でもよい)において、選別手段を構成する撮像手段としてのカメラ28(CCDカメラ)が設けられている。カメラ28は例えば512画素を備えたラインセンサカメラにされると共に、カメラ28の視野中心軸Qは略水平にされて穀粒Gの自由落下軌道Pへ向けられており、カメラ28は、第1送出部22を経て繰出ロール26から自由落下する穀粒Gが視野中心軸Q近傍に到達した際、及び、第2送出部24を経て繰出ロール26から自由落下する穀粒Gが視野中心軸Q近傍に到達した際に、第1送出部22及び第2送出部24を経た穀粒Gの繰出ロール26からの自由落下軌道Pの左右方向幅よりも広い所定の線状領域を前側(一側)から撮影(撮像)する。
【0023】
カメラ28と穀粒Gの自由落下軌道Pとの間には、照明手段としての一対の蛍光灯30、32が設けられており、一対の蛍光灯30、32は、カメラ28の視野中心軸Qに対して上側と下側とに対称配置されて、自由落下軌道Pに沿って自由落下する穀粒Gを照明する。
【0024】
カメラ28の視野中心軸Q上には、穀粒Gの自由落下軌道Pの反カメラ28側において、反射手段としての比色板34(反射板)が設けられており、比色板34が所定色にされて良粒と判断される穀粒Gと同じ光反射率にされることで、カメラ28が所定の光量を感知して所定レベルの信号(ビデオ信号)を出力できるようにされている。
【0025】
穀粒Gの自由落下軌道Pと比色板34との間には、追加照明手段としての一対の蛍光灯36、38が設けられており、一対の蛍光灯36、38は、カメラ28の視野中心軸Qに対して上側と下側とに対称配置されて、自由落下軌道Pに沿って自由落下する穀粒Gを照明する。なお、一対の蛍光灯36、38は、省略することができる。
【0026】
カメラ28の撮影領域は、左右方向において、複数に分割されており、カメラ28の各分割撮影領域において撮影された穀粒Gを含む画像(穀粒Gの色彩)に基づいて、カメラ28からの出力信号のレベルがしきい値(しきいレベル)よりも低い画素が検出されない分割撮影領域の穀粒Gが第1粒としての良粒(例えば白色粒)であると判断され、カメラ28からの出力信号のレベルがしきい値よりも低い画素が検出された分割撮影領域の穀粒Gが第2粒としての不良粒(例えば病気や虫食い等による被害粒等の着色粒)であると判断される。
【0027】
穀粒Gの自由落下軌道Pの前側(後側でもよい)には、カメラ28よりも下側において、選別手段を構成するエジェクタ40が設けられており、エジェクタ40はフラッパ方式のもの(エアノズルと電磁弁とを使ったエアノズル方式のものであってもよい)にされている。エジェクタ40は、弾性を有する断面L字形板状の板バネ42と、板バネ42に対応するソレノイド44と、を有しており、カメラ28の撮影領域が左右方向に複数に分割されたことに対応して、板バネ42及びソレノイド44はそれぞれ左右方向に複数設けられている。板バネ42は、上側部分をソレノイド44の上側に配置されると共に、下側部分をソレノイド44のプランジャ44Aと穀粒Gの自由落下軌道Pとの間に配置されており、穀粒Gが不良粒と判断されたカメラ28の分割撮影領域に対応するチャネルのソレノイド44が作動されて(所定(例えば36V)の電圧を瞬間的に印加されて)プランジャ44Aが板バネ42の下側部分を瞬間的に叩く(押圧)することで、板バネ42が弾性変形されて下側部分において自由落下軌道Pに入り込み、自由落下する当該穀粒Gが自由落下軌道Pから後側へ弾き出される。これにより、穀粒Gが、自由落下軌道Pに沿って自由落下し続ける良粒と、エジェクタ40によって自由落下軌道Pから弾き出される不良粒と、に一次選別される。
【0028】
エジェクタ40の左側部分の下側には、分別手段を構成する搬送手段としての筒状の第1良粒選別筒46と、分別手段を構成する筒状の第1不良粒選別筒48と、が設けられている。第1良粒選別筒46の上面は、振動フィーダ20の第1送出部22を経た穀粒Gの自由落下軌道Pに交差されると共に、第1不良粒選別筒48の上面は第1良粒選別筒46の後側に配置されており、第1良粒選別筒46には第1送出部22を経て良粒と判断され自由落下軌道Pに沿って自由落下し続ける穀粒G(一次良粒)が上側から流入すると共に、第1不良粒選別筒48には第1送出部22を経て不良粒と判断され自由落下軌道Pから後側へ弾き出された穀粒G(一次不良粒)が上側から流入する。また、第1良粒選別筒46の下側部分(パイプ部)は、屈曲可能及び伸縮可能にされており、これにより、第1良粒選別筒46の下端の位置を変更可能にされている。
【0029】
第1不良粒選別筒48の下端下側には、収集手段を構成する第1不良粒収集箱50が設けられている。第1不良粒収集箱50は上面が開放された箱状にされており、第1不良粒収集箱50には第1不良粒選別筒48から不良粒と判断された穀粒G(一次不良粒)が流入されて収集される。
【0030】
色彩選別機10の後面外側には、第2搬送手段(第2揚粒手段)としての第2昇降機52が設けられている。第2昇降機52の前面下端には、第1昇降機16の右面下端と同様の搬送筒74が設けられており、搬送筒74は、基端開口が第2昇降機52の下端内に連通されると共に、先端開口が色彩選別機10内に配置されている。搬送筒74の先端には第1良粒選別筒46の下端が接続されており、第1良粒選別筒46からの良粒と判断された穀粒G(一次良粒)が、搬送筒74を介して第2昇降機52の下端に供給されて、第2昇降機52によって第2昇降機52の上端まで搬送される。
【0031】
第2昇降機52の後面下端には、第1昇降機16の左面下端と同様の供給口(図示省略)、一対の取付板72及びストッパが設けられている。ここで、第2昇降機52の後面に対し第2閉鎖手段としての断面L字形板状のシャッタ78が上側部分を後側へ向けられた状態で上側から下側へスライドされて、シャッタ78の下側部分の左右両端部が第2昇降機52の一対の取付板72内に挿入されると共に、シャッタ78がストッパに当接されることで、第2昇降機52の後面下端にシャッタ78が取り付けられて、第2昇降機52の供給口がシャッタ78によって閉鎖されている。これにより、第2昇降機52の下端に供給された穀粒G(一次良粒)が第2昇降機52の供給口から排出されることが防止されている。
【0032】
色彩選別機10の上部には、右部後側において、第2供給手段としての略矩形筒状の第2タンク54が設けられており、第2タンク54には、第2昇降機52の上端まで搬送された穀粒G(一次良粒)が上側から供給される。また、第2タンク54の下部は、漏斗状にされている。
【0033】
第2タンク54の下端は、振動フィーダ20の第2送出部24底面直上に配置されており、第2タンク54の下端と第2送出部24の底面とは僅かに離間している。このため、第2タンク54に供給されて第2タンク54の下端から第2送出部24の底面へ流下した穀粒G(一次良粒)が、振動されつつ整列されながら(均一に散乱されながら)、第2送出部24の底面を後側から前側へ送出されて、第2送出部24の前端から所定量ずつ流下される。
【0034】
これにより、第2送出部24の前端から流下した穀粒G(一次良粒)が、繰出ロール26によって繰り出されて繰出ロール26の前側へ自由落下軌道Pに沿って自由落下し、カメラ28の視野中心軸Q近傍に到達した際にカメラ28によって前側から撮影されることで、カメラ28の各分割撮影領域の穀粒Gが、各分割撮影領域において撮影された穀粒Gを含む画像に基づいて良粒であるか不良粒であるかが判断されて、自由落下軌道Pに沿って自由落下し続ける良粒と、エジェクタ40によって自由落下軌道Pから弾き出される不良粒と、に二次選別される。
【0035】
エジェクタ40の右側部分の下側には、分別手段を構成する搬送手段としての筒状の第2良粒選別筒56、分別手段を構成する筒状の第2不良粒選別筒58と、が設けられている。第2良粒選別筒56の上面は、第2送出部24を経た穀粒Gの自由落下軌道Pに交差されると共に、第2不良粒選別筒58の上面は第2良粒選別筒56の後側に配置されており、第2良粒選別筒56には第2送出部24を経て良粒と判断され自由落下軌道Pに沿って自由落下し続ける穀粒G(二次良粒)が上側から流入すると共に、第2不良粒選別筒58には第2送出部24を経て不良粒と判断され自由落下軌道Pから後側へ弾き出された穀粒G(二次不良粒)が上側から流入する。また、第2良粒選別筒56の下側部分(パイプ部)は、屈曲可能及び伸縮可能にされており、これにより、第2良粒選別筒56の下端の位置を変更可能にされている。
【0036】
第2不良粒選別筒58の下端下側には、収集手段を構成する第2不良粒収集箱60が設けられている。第2不良粒収集箱60は上面が開放された箱状にされており、第2不良粒収集箱60には第2不良粒選別筒58から不良粒と判断された穀粒G(二次不良粒)が流入されて収集される。
【0037】
第2良粒選別筒56の下端下側には、収集手段を構成する良粒収集箱62が設けられている。良粒収集箱62は上面が開放された箱状にされており、良粒収集箱62には第2良粒選別筒56から良粒と判断された穀粒G(二次良粒)が流入されて収集される。
【0038】
色彩選別機10の前面上部には、操作部としての操作パネル64が設置されており、操作パネル64において、色彩選別機10(第1昇降機16、第2昇降機52、振動フィーダ20、繰出ロール26、カメラ28、蛍光灯30、32、36、38、エジェクタ40、良粒と不良粒との判断のしきい値等)の設定操作及び制御操作を可能にされている。また、操作パネル64は、色彩選別機10の前面上部に代えて、色彩選別機10の右面上部又は左面上部に設置可能にされている。
【0039】
図5には、色彩選別機10の第2態様が前側から見た模式図にて示されており、図6には、色彩選別機10の第2態様が右側から見た模式図にて示されている。
【0040】
図5及び図6では、上記の構成から、供給ホッパ14が上側へスライドされて第1昇降機16の左面下端から取り外されると共に、シャッタ78が上側へスライドされて第2昇降機52の後面下端から取り外された後に、上記第1昇降機16の左面下端の場合と同様に、第2昇降機52の後面下端に供給ホッパ14が取り付けられると共に、上記第2昇降機52の後面下端の場合と同様に、第1昇降機16の左面下端にシャッタ78が取り付けられている。これにより、供給ホッパ14の排出口が第2昇降機52の供給口に連通されると共に、第1昇降機16の供給口がシャッタ78によって閉鎖されている。また、上記穀粒投入機70は、第2昇降機52に取り付けられた供給ホッパ14にも、穀粒Gを投入することができる。
【0041】
さらに、上記の構成から、第1良粒選別筒46の下端が第2昇降機52の搬送筒74先端から取り外されると共に、閉鎖蓋76が第1昇降機16の搬送筒74先端から取り外された後に、上記第2昇降機52の搬送筒74先端の場合と同様に、第2良粒選別筒56の下端が第1昇降機16の搬送筒74先端に接続されると共に、上記第1昇降機16の搬送筒74先端開口の場合と同様に、閉鎖蓋76によって第2昇降機52の搬送筒74先端開口が閉鎖され、かつ、上記第2良粒選別筒56の下端下側の場合と同様に、第1良粒選別筒46の下端下側に良粒収集箱62が設けられている。
【0042】
以上により、供給ホッパ14に、上側から、穀粒Gが投入されることで、色彩選別機10に穀粒Gが供給され、かつ、供給ホッパ14へ投入された穀粒Gが、供給ホッパ14の排出口及び第2昇降機52の供給口を介して第2昇降機52の下端に供給されて、第2昇降機52によって第2昇降機52の上端まで搬送される。また、第2昇降機52の下端に供給された穀粒Gが第2昇降機52の搬送筒74先端開口から排出されることが閉鎖蓋76によって防止されている。
【0043】
さらに、第2良粒選別筒56からの良粒と判断された穀粒G(一次良粒)が、第1昇降機16の下端に搬送筒74を介して供給されて、第1昇降機16によって第1昇降機16の上端まで搬送される。また、第1昇降機16の供給口がシャッタ78によって閉鎖されることで、第1昇降機16の下端に供給された穀粒G(一次良粒)が第1昇降機16の供給口から排出されることが防止されている。
【0044】
しかも、良粒収集箱62には、第1良粒選別筒46から良粒と判断された穀粒G(二次良粒)が流入されて収集される。
【0045】
次に、本実施の形態の作用を説明する。
【0046】
以上の構成の色彩選別機10において穀粒Gの選別を行うためには、色彩選別機10の初期導入時又は定められた時間毎に、初期設定のためのティーチング処理を行う。すなわち、オペレータが操作パネル64の操作によって、又は定められた時間毎に自動的に、ティーチング処理の開始を指示すると、まずカメラ28によって所定の撮影対象領域が撮影され、カメラ28からの出力信号に基づいてティーチング処理が実施される。さらに、オペレータが操作パネル64の操作によって所望のしきい値率を指定した後、操作パネル64の操作でしきい値設定処理の開始を指示すると、しきい値設定処理が実行開始される。しきい値設定処理では、最初に上記ティーチング処理と同様に、カメラ28によって所定の撮影対象領域が撮影され、カメラ28からの出力信号に基づいてしきい値設定処理が行われる。
【0047】
次に、穀粒Gの色彩選別処理が実施される。
【0048】
図3及び図4に示す色彩選別機10の第1態様では、オペレータ又は穀粒投入機70によって、選別対象となる穀粒Gが、供給ホッパ14に投入されると、第1昇降機16によって搬送されて、第1タンク18に供給されることで、穀粒Gが、振動フィーダ20の第1送出部22に供給される。これにより、穀粒Gが、第1送出部22の前端から流下して、繰出ロール26の前側へ自由落下軌道Pに沿って自由落下する。
【0049】
自由落下軌道Pに沿って自由落下する穀粒Gは、前側からカメラ28によって撮影されて、良粒であるか不良粒であるかが判断されることで、良粒と判断された穀粒G(一次良粒)は自由落下軌道Pに沿って自由落下し続ける一方、不良粒と判断された穀粒G(一次不良粒)はエジェクタ40によって自由落下軌道Pから弾き出されて、穀粒Gが良粒と不良粒とに一次選別される。
【0050】
自由落下軌道Pから弾き出された穀粒G(一次不良粒)は、第1不良粒選別筒48に流入されて、第1不良粒収集箱50に収集される。
【0051】
自由落下軌道Pに沿って自由落下し続ける穀粒G(一次良粒)は、第1良粒選別筒46に流入されて、第2昇降機52によって搬送されることで、第2タンク54に供給されて、振動フィーダ20の第2送出部24に供給される。これにより、穀粒G(一次良粒)が、第2送出部24の前端から流下して、繰出ロール26の前側へ自由落下軌道Pに沿って自由落下する。
【0052】
自由落下軌道Pに沿って自由落下する穀粒G(一次良粒)は、前側からカメラ28によって撮影されて、良粒であるか不良粒であるかが判断されることで、良粒と判断された穀粒G(二次良粒)は自由落下軌道Pに沿って自由落下し続ける一方、不良粒と判断された穀粒G(二次不良粒)はエジェクタ40によって自由落下軌道Pから弾き出されて、穀粒Gが良粒と不良粒とに二次選別される。
【0053】
自由落下軌道Pから弾き出された穀粒G(二次不良粒)は、第2不良粒選別筒58に流入されて、第2不良粒収集箱60に収集される。
【0054】
自由落下軌道Pに沿って自由落下し続ける穀粒G(二次良粒)は、第2良粒選別筒56に流入されて、良粒収集箱62に収集される。
【0055】
本色彩選別機10の第1態様では、良粒収集箱62に収集された穀粒G(二次良粒)が良粒とされる一方、第1不良粒収集箱50及び第2不良粒収集箱60に収集された穀粒G(一次不良粒及び二次不良粒)が不良粒とされる。
【0056】
図5及び図6に示す色彩選別機10の第2態様では、オペレータ又は穀粒投入機70によって、選別対象となる穀粒Gが、供給ホッパ14に投入されると、第2昇降機52によって搬送されて、第2タンク54に供給されることで、穀粒Gが、振動フィーダ20の第2送出部24に供給される。これにより、穀粒Gが、第2送出部24の前端から流下して、繰出ロール26の前側へ自由落下軌道Pに沿って自由落下する。
【0057】
自由落下軌道Pに沿って自由落下する穀粒Gは、前側からカメラ28によって撮影されて、良粒であるか不良粒であるかが判断されることで、良粒と判断された穀粒G(一次良粒)は自由落下軌道Pに沿って自由落下し続ける一方、不良粒と判断された穀粒G(一次不良粒)はエジェクタ40によって自由落下軌道Pから弾き出されて、穀粒Gが良粒と不良粒とに一次選別される。
【0058】
自由落下軌道Pから弾き出された穀粒G(一次不良粒)は、第2不良粒選別筒58に流入されて、第2不良粒収集箱60に収集される。
【0059】
自由落下軌道Pに沿って自由落下し続ける穀粒G(一次良粒)は、第2良粒選別筒56に流入されて、第1昇降機16によって搬送されることで、第1タンク18に供給されて、振動フィーダ20の第1送出部22に供給される。これにより、穀粒G(一次良粒)が、第1送出部22の前端から流下して、繰出ロール26の前側へ自由落下軌道Pに沿って自由落下する。
【0060】
自由落下軌道Pに沿って自由落下する穀粒G(一次良粒)は、前側からカメラ28によって撮影されて、良粒であるか不良粒であるかが判断されることで、良粒と判断された穀粒G(二次良粒)は自由落下軌道Pに沿って自由落下し続ける一方、不良粒と判断された穀粒G(二次不良粒)はエジェクタ40によって自由落下軌道Pから弾き出されて、穀粒Gが良粒と不良粒とに二次選別される。
【0061】
自由落下軌道Pから弾き出された穀粒G(二次不良粒)は、第1不良粒選別筒48に流入されて、第1不良粒収集箱50に収集される。
【0062】
自由落下軌道Pに沿って自由落下し続ける穀粒G(二次良粒)は、第1良粒選別筒46に流入されて、良粒収集箱62に収集される。
【0063】
本色彩選別機10の第2態様では、良粒収集箱62に収集された穀粒G(二次良粒)が良粒とされる一方、第1不良粒収集箱50及び第2不良粒収集箱60に収集された穀粒G(一次不良粒及び二次不良粒)が不良粒とされる。
【0064】
以上により、本色彩選別機10の第1態様と第2態様との何れの場合でも、穀粒Gを2回選別することができるため、第1昇降機16及び第2昇降機52の何れに供給ホッパ14を取り付けてもよい。したがって、第1昇降機16に供給ホッパ14を取り付けるか第2昇降機52に供給ホッパ14を取り付けるかを選択することができ、色彩選別機10の設置場所のレイアウトに柔軟に対応することができる。
【0065】
しかも、操作パネル64は、色彩選別機10の前面上部の他に、色彩選別機10の右面上部及び左面上部にも設置可能にされている。このため、色彩選別機10の設置場所のレイアウトに一層柔軟に対応することができる。
【0066】
なお、本色彩選別機10では、穀粒Gの繰出ロール26からの自由落下軌道Pの前側にカメラ28を設けた構成としたが、穀粒Gの繰出ロール26からの自由落下軌道Pの前側及び後側にカメラ28を設けた構成としてもよい。この場合、後側のカメラ28の視野中心軸Qは傾斜されて穀粒Gの自由落下軌道Pへ向けられ、一対の蛍光灯36、38はカメラ28の視野中心軸Qに対して上側と下側とに対称配置される。
【0067】
また、本色彩選別機10では、本発明の粒体を穀粒Gとした構成としたが、本発明の粒体を造粒されたプラスチック片等とした構成としてもよい。
【図面の簡単な説明】
【0068】
【図1】本発明の実施の形態に係る色彩選別機を示す前斜め右側から見た斜視図である。
【図2】本発明の実施の形態に係る色彩選別機を示す上側から見た平面図である。
【図3】本発明の実施の形態に係る色彩選別機の第1態様を示す前側から見た模式図である。
【図4】本発明の実施の形態に係る色彩選別機の第1態様を示す右側から見た模式図である。
【図5】本発明の実施の形態に係る色彩選別機の第2態様を示す前側から見た模式図である。
【図6】本発明の実施の形態に係る色彩選別機の第2態様を示す右側から見た模式図である。
【符号の説明】
【0069】
10 色彩選別機(選別機)
12 カバー(周壁)
14 供給ホッパ(投入部)
16 第1昇降機(第1搬送手段)
28 カメラ(選別手段)
40 エジェクタ(選別手段)
46 第1良粒選別筒(搬送手段)
52 第2昇降機(第2搬送手段)
56 第2良粒選別筒(搬送手段)
64 操作パネル(操作部)
G 穀粒(粒体)
【技術分野】
【0001】
本発明は、粒体を選別する選別機に関する。
【背景技術】
【0002】
色彩選別機としては、原料供給ホッパに投入された穀粒を良品と不良品とに選別するものがある(例えば、特許文献1参照)。
【0003】
しかしながら、この色彩選別機では、外側に突出して設けられた原料供給ホッパの設置位置を変更できない。このため、色彩選別機の設置場所のレイアウトに対応できない場合がある。
【特許文献1】特開2003−156447公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は上記事実を考慮し、設置場所のレイアウトに柔軟に対応できる選別機を得ることが目的である。
【課題を解決するための手段】
【0005】
請求項1に記載の選別機は、粒体が投入される投入部と、供給された粒体を搬送可能にされ、前記投入部が取り付けられた際に前記投入部へ投入された粒体が供給される第1搬送手段と、供給された粒体を搬送可能にされ、前記投入部が取り付けられた際に前記投入部へ投入された粒体が供給される第2搬送手段と、前記第1搬送手段及び第2搬送手段により搬送された粒体を選別可能にされた選別手段と、前記選別手段により選別された粒体を搬送して前記投入部からの粒体が供給されない前記第1搬送手段及び第2搬送手段の何れか一方へ供給する搬送手段と、を備えている。
【0006】
請求項2に記載の選別機は、請求項1に記載の選別機において、周壁に設置されると共に、設置位置を変更可能にされ、設定操作及び制御操作の少なくとも一方を可能にされた操作部を備えた、ことを特徴としている。
【発明の効果】
【0007】
請求項1に記載の選別機では、第1搬送手段に投入部が取り付けられて投入部へ投入された粒体が第1搬送手段へ供給される場合に、第1搬送手段が粒体を搬送して、選別手段が粒体を選別する。さらに、搬送手段が、選別手段により選別された粒体を搬送して、投入部からの粒体が供給されない第2搬送手段へ供給することで、第2搬送手段が粒体を搬送して、選別手段が粒体を選別する。このため、粒体を2回選別することができる。
【0008】
一方、第2搬送手段に投入部が取り付けられて投入部へ投入された粒体が第2搬送手段へ供給される場合に、第2搬送手段が粒体を搬送して、選別手段が粒体を選別する。さらに、搬送手段が、選別手段により選別された粒体を搬送して、投入部からの粒体が供給されない第1搬送手段へ供給することで、第1搬送手段が粒体を搬送して、選別手段が粒体を選別する。このため、粒体を2回選別することができる。
【0009】
これにより、第1搬送手段及び第2搬送手段の何れに投入部を取り付けても、粒体を2回選別することができる。したがって、第1搬送手段に投入部を取り付けるか第2搬送手段に投入部を取り付けるかを選択することができ、選別機の設置場所のレイアウトに柔軟に対応することができる。
【0010】
請求項2に記載の選別機では、周壁に操作部が設置されており、操作部において設定操作及び制御操作の少なくとも一方が可能にされている。
【0011】
ここで、操作部の設置位置が変更可能にされている。このため、選別機の設置場所のレイアウトに一層柔軟に対応することができる。
【発明を実施するための最良の形態】
【0012】
図1には、本発明の実施の形態に係る選別機としての色彩選別機10が前斜め右側から見た斜視図にて示されており、図2には、色彩選別機10が上側から見た平面図にて示されている。さらに、図3には、色彩選別機10の第1態様が前側から見た模式図にて示されており、図4には、色彩選別機10の第1態様が右側から見た模式図にて示されている。
【0013】
本発明の実施の形態に係る色彩選別機10は、略直方体状にされており、色彩選別機10の全周面は、図1及び図2に一部図示する周壁としてのカバー12に覆われている。
【0014】
色彩選別機10の特に左側かつ後側の角部外側には、穀粒投入手段としての穀粒投入機70(例えば精米機又は脱ぷ機)を設けることができ、穀粒投入機70から下記供給ホッパ14に、粒体としての穀粒G(白米、玄米等の米粒の他大豆等も含む)を投入することができる。
【0015】
色彩選別機10の左側には、下側部の外側において、投入部としての漏斗状の供給ホッパ14が設けられており、供給ホッパ14の排出口(下側開口)は供給ホッパ14の右側壁下部に形成されている。供給ホッパ14の右側壁外面には、排出口の前後方向両側において、スライド板(図示省略)が突出された状態で設けられており、スライド板は、断面L字形板状にされて、先端側部分が排出口とは反対側へ突出されている。
【0016】
色彩選別機10の左面外側には、供給ホッパ14よりも内側において、第1搬送手段(第1揚粒手段)としての第1昇降機16が設けられており、第1昇降機16の左面下端には、供給口(図示省略)が設けられている。第1昇降機16の左面下端には、供給口の前後方向両側において、取付板72が突出された状態で設けられており、取付板72は、断面L字形板状にされて、先端側部分が供給口側へ突出されている。第1昇降機16の左面下端には、供給口の下側において、ストッパ(図示省略)が設けられており、ストッパは、第1昇降機16の左面から左方へ突出されている。
【0017】
ここで、第1昇降機16の左面に対し供給ホッパ14の右側壁が上側から下側へスライドされて、供給ホッパ14の一対のスライド板が第1昇降機16の一対の取付板72内に挿入されると共に、供給ホッパ14がストッパに当接されることで、第1昇降機16の左面下端に供給ホッパ14が取り付けられて、供給ホッパ14の排出口が第1昇降機16の供給口に連通されている。これにより、供給ホッパ14に、上側から、穀粒Gが投入されることで、色彩選別機10に穀粒Gが供給され、かつ、供給ホッパ14へ投入された穀粒Gが、供給ホッパ14の排出口及び第1昇降機16の供給口を介して第1昇降機16の下端に供給されて、第1昇降機16によって第1昇降機16の上端まで搬送される。
【0018】
第1昇降機16の右面下端には、筒状の搬送筒74が設けられており、搬送筒74は、基端開口が第1昇降機16の下端内に連通されると共に、先端開口が色彩選別機10内に配置されている。搬送筒74の先端開口は、第1閉鎖手段としての閉鎖蓋76によって閉鎖されており、これにより、第1昇降機16の下端に供給された穀粒Gが搬送筒74の先端開口から排出されることが防止されている。
【0019】
色彩選別機10の上部には、左部後側において、第1供給手段としての略矩形筒状の第1タンク18が設けられており、第1タンク18には、第1昇降機16の上端まで搬送された穀粒Gが上側から供給される。また、第1タンク18の下部は、漏斗状にされている。
【0020】
色彩選別機10の後部には、第1タンク18よりも下側において、送出手段としての振動フィーダ20(直進フィーダ)が設けられており、振動フィーダ20のトラフ(盆)は、上面及び前面が開放された略直方体箱状にされている。振動フィーダ20のトラフ内には、仕切壁20Aが設けられており、仕切壁20Aは振動フィーダ20のトラフ内を左側の第1送出部22と右側の第2送出部24とに左右方向中央で仕切っている。第1送出部22の底面直上には、第1タンク18の下端が配置されており、第1送出部22の底面と第1タンク18の下端とは僅かに離間している。振動フィーダ20のトラフは、底壁上面(第1送出部22及び第2送出部24の底面)が前後方向へ往復振動されており、第1タンク18に供給されて第1タンク18の下端から第1送出部22の底面へ流下した穀粒Gが、振動されつつ整列されながら(均一に散乱されながら)、第1送出部22の底面を後側から前側へ送出されて、第1送出部22の前端から所定量ずつ流下される。
【0021】
振動フィーダ20の前側(下流側)には、繰出手段としての断面外形円状の繰出ロール26が設けられている。繰出ロール26は上側が後側から前側へ向かう方向へ中心軸周りに回転されており、第1送出部22の前端から流下した穀粒G及び後述の如く第2送出部24の前端から流下した穀粒Gが、繰出ロール26によって繰り出されて、繰出ロール26の前側へ自由落下軌道Pに沿って自由落下する。なお、繰出ロール26の周面は、穀粒Gがあまり滑らない構成にされている。
【0022】
繰出ロール26の下方には、穀粒Gの繰出ロール26からの自由落下軌道Pの前側(後側でもよい)において、選別手段を構成する撮像手段としてのカメラ28(CCDカメラ)が設けられている。カメラ28は例えば512画素を備えたラインセンサカメラにされると共に、カメラ28の視野中心軸Qは略水平にされて穀粒Gの自由落下軌道Pへ向けられており、カメラ28は、第1送出部22を経て繰出ロール26から自由落下する穀粒Gが視野中心軸Q近傍に到達した際、及び、第2送出部24を経て繰出ロール26から自由落下する穀粒Gが視野中心軸Q近傍に到達した際に、第1送出部22及び第2送出部24を経た穀粒Gの繰出ロール26からの自由落下軌道Pの左右方向幅よりも広い所定の線状領域を前側(一側)から撮影(撮像)する。
【0023】
カメラ28と穀粒Gの自由落下軌道Pとの間には、照明手段としての一対の蛍光灯30、32が設けられており、一対の蛍光灯30、32は、カメラ28の視野中心軸Qに対して上側と下側とに対称配置されて、自由落下軌道Pに沿って自由落下する穀粒Gを照明する。
【0024】
カメラ28の視野中心軸Q上には、穀粒Gの自由落下軌道Pの反カメラ28側において、反射手段としての比色板34(反射板)が設けられており、比色板34が所定色にされて良粒と判断される穀粒Gと同じ光反射率にされることで、カメラ28が所定の光量を感知して所定レベルの信号(ビデオ信号)を出力できるようにされている。
【0025】
穀粒Gの自由落下軌道Pと比色板34との間には、追加照明手段としての一対の蛍光灯36、38が設けられており、一対の蛍光灯36、38は、カメラ28の視野中心軸Qに対して上側と下側とに対称配置されて、自由落下軌道Pに沿って自由落下する穀粒Gを照明する。なお、一対の蛍光灯36、38は、省略することができる。
【0026】
カメラ28の撮影領域は、左右方向において、複数に分割されており、カメラ28の各分割撮影領域において撮影された穀粒Gを含む画像(穀粒Gの色彩)に基づいて、カメラ28からの出力信号のレベルがしきい値(しきいレベル)よりも低い画素が検出されない分割撮影領域の穀粒Gが第1粒としての良粒(例えば白色粒)であると判断され、カメラ28からの出力信号のレベルがしきい値よりも低い画素が検出された分割撮影領域の穀粒Gが第2粒としての不良粒(例えば病気や虫食い等による被害粒等の着色粒)であると判断される。
【0027】
穀粒Gの自由落下軌道Pの前側(後側でもよい)には、カメラ28よりも下側において、選別手段を構成するエジェクタ40が設けられており、エジェクタ40はフラッパ方式のもの(エアノズルと電磁弁とを使ったエアノズル方式のものであってもよい)にされている。エジェクタ40は、弾性を有する断面L字形板状の板バネ42と、板バネ42に対応するソレノイド44と、を有しており、カメラ28の撮影領域が左右方向に複数に分割されたことに対応して、板バネ42及びソレノイド44はそれぞれ左右方向に複数設けられている。板バネ42は、上側部分をソレノイド44の上側に配置されると共に、下側部分をソレノイド44のプランジャ44Aと穀粒Gの自由落下軌道Pとの間に配置されており、穀粒Gが不良粒と判断されたカメラ28の分割撮影領域に対応するチャネルのソレノイド44が作動されて(所定(例えば36V)の電圧を瞬間的に印加されて)プランジャ44Aが板バネ42の下側部分を瞬間的に叩く(押圧)することで、板バネ42が弾性変形されて下側部分において自由落下軌道Pに入り込み、自由落下する当該穀粒Gが自由落下軌道Pから後側へ弾き出される。これにより、穀粒Gが、自由落下軌道Pに沿って自由落下し続ける良粒と、エジェクタ40によって自由落下軌道Pから弾き出される不良粒と、に一次選別される。
【0028】
エジェクタ40の左側部分の下側には、分別手段を構成する搬送手段としての筒状の第1良粒選別筒46と、分別手段を構成する筒状の第1不良粒選別筒48と、が設けられている。第1良粒選別筒46の上面は、振動フィーダ20の第1送出部22を経た穀粒Gの自由落下軌道Pに交差されると共に、第1不良粒選別筒48の上面は第1良粒選別筒46の後側に配置されており、第1良粒選別筒46には第1送出部22を経て良粒と判断され自由落下軌道Pに沿って自由落下し続ける穀粒G(一次良粒)が上側から流入すると共に、第1不良粒選別筒48には第1送出部22を経て不良粒と判断され自由落下軌道Pから後側へ弾き出された穀粒G(一次不良粒)が上側から流入する。また、第1良粒選別筒46の下側部分(パイプ部)は、屈曲可能及び伸縮可能にされており、これにより、第1良粒選別筒46の下端の位置を変更可能にされている。
【0029】
第1不良粒選別筒48の下端下側には、収集手段を構成する第1不良粒収集箱50が設けられている。第1不良粒収集箱50は上面が開放された箱状にされており、第1不良粒収集箱50には第1不良粒選別筒48から不良粒と判断された穀粒G(一次不良粒)が流入されて収集される。
【0030】
色彩選別機10の後面外側には、第2搬送手段(第2揚粒手段)としての第2昇降機52が設けられている。第2昇降機52の前面下端には、第1昇降機16の右面下端と同様の搬送筒74が設けられており、搬送筒74は、基端開口が第2昇降機52の下端内に連通されると共に、先端開口が色彩選別機10内に配置されている。搬送筒74の先端には第1良粒選別筒46の下端が接続されており、第1良粒選別筒46からの良粒と判断された穀粒G(一次良粒)が、搬送筒74を介して第2昇降機52の下端に供給されて、第2昇降機52によって第2昇降機52の上端まで搬送される。
【0031】
第2昇降機52の後面下端には、第1昇降機16の左面下端と同様の供給口(図示省略)、一対の取付板72及びストッパが設けられている。ここで、第2昇降機52の後面に対し第2閉鎖手段としての断面L字形板状のシャッタ78が上側部分を後側へ向けられた状態で上側から下側へスライドされて、シャッタ78の下側部分の左右両端部が第2昇降機52の一対の取付板72内に挿入されると共に、シャッタ78がストッパに当接されることで、第2昇降機52の後面下端にシャッタ78が取り付けられて、第2昇降機52の供給口がシャッタ78によって閉鎖されている。これにより、第2昇降機52の下端に供給された穀粒G(一次良粒)が第2昇降機52の供給口から排出されることが防止されている。
【0032】
色彩選別機10の上部には、右部後側において、第2供給手段としての略矩形筒状の第2タンク54が設けられており、第2タンク54には、第2昇降機52の上端まで搬送された穀粒G(一次良粒)が上側から供給される。また、第2タンク54の下部は、漏斗状にされている。
【0033】
第2タンク54の下端は、振動フィーダ20の第2送出部24底面直上に配置されており、第2タンク54の下端と第2送出部24の底面とは僅かに離間している。このため、第2タンク54に供給されて第2タンク54の下端から第2送出部24の底面へ流下した穀粒G(一次良粒)が、振動されつつ整列されながら(均一に散乱されながら)、第2送出部24の底面を後側から前側へ送出されて、第2送出部24の前端から所定量ずつ流下される。
【0034】
これにより、第2送出部24の前端から流下した穀粒G(一次良粒)が、繰出ロール26によって繰り出されて繰出ロール26の前側へ自由落下軌道Pに沿って自由落下し、カメラ28の視野中心軸Q近傍に到達した際にカメラ28によって前側から撮影されることで、カメラ28の各分割撮影領域の穀粒Gが、各分割撮影領域において撮影された穀粒Gを含む画像に基づいて良粒であるか不良粒であるかが判断されて、自由落下軌道Pに沿って自由落下し続ける良粒と、エジェクタ40によって自由落下軌道Pから弾き出される不良粒と、に二次選別される。
【0035】
エジェクタ40の右側部分の下側には、分別手段を構成する搬送手段としての筒状の第2良粒選別筒56、分別手段を構成する筒状の第2不良粒選別筒58と、が設けられている。第2良粒選別筒56の上面は、第2送出部24を経た穀粒Gの自由落下軌道Pに交差されると共に、第2不良粒選別筒58の上面は第2良粒選別筒56の後側に配置されており、第2良粒選別筒56には第2送出部24を経て良粒と判断され自由落下軌道Pに沿って自由落下し続ける穀粒G(二次良粒)が上側から流入すると共に、第2不良粒選別筒58には第2送出部24を経て不良粒と判断され自由落下軌道Pから後側へ弾き出された穀粒G(二次不良粒)が上側から流入する。また、第2良粒選別筒56の下側部分(パイプ部)は、屈曲可能及び伸縮可能にされており、これにより、第2良粒選別筒56の下端の位置を変更可能にされている。
【0036】
第2不良粒選別筒58の下端下側には、収集手段を構成する第2不良粒収集箱60が設けられている。第2不良粒収集箱60は上面が開放された箱状にされており、第2不良粒収集箱60には第2不良粒選別筒58から不良粒と判断された穀粒G(二次不良粒)が流入されて収集される。
【0037】
第2良粒選別筒56の下端下側には、収集手段を構成する良粒収集箱62が設けられている。良粒収集箱62は上面が開放された箱状にされており、良粒収集箱62には第2良粒選別筒56から良粒と判断された穀粒G(二次良粒)が流入されて収集される。
【0038】
色彩選別機10の前面上部には、操作部としての操作パネル64が設置されており、操作パネル64において、色彩選別機10(第1昇降機16、第2昇降機52、振動フィーダ20、繰出ロール26、カメラ28、蛍光灯30、32、36、38、エジェクタ40、良粒と不良粒との判断のしきい値等)の設定操作及び制御操作を可能にされている。また、操作パネル64は、色彩選別機10の前面上部に代えて、色彩選別機10の右面上部又は左面上部に設置可能にされている。
【0039】
図5には、色彩選別機10の第2態様が前側から見た模式図にて示されており、図6には、色彩選別機10の第2態様が右側から見た模式図にて示されている。
【0040】
図5及び図6では、上記の構成から、供給ホッパ14が上側へスライドされて第1昇降機16の左面下端から取り外されると共に、シャッタ78が上側へスライドされて第2昇降機52の後面下端から取り外された後に、上記第1昇降機16の左面下端の場合と同様に、第2昇降機52の後面下端に供給ホッパ14が取り付けられると共に、上記第2昇降機52の後面下端の場合と同様に、第1昇降機16の左面下端にシャッタ78が取り付けられている。これにより、供給ホッパ14の排出口が第2昇降機52の供給口に連通されると共に、第1昇降機16の供給口がシャッタ78によって閉鎖されている。また、上記穀粒投入機70は、第2昇降機52に取り付けられた供給ホッパ14にも、穀粒Gを投入することができる。
【0041】
さらに、上記の構成から、第1良粒選別筒46の下端が第2昇降機52の搬送筒74先端から取り外されると共に、閉鎖蓋76が第1昇降機16の搬送筒74先端から取り外された後に、上記第2昇降機52の搬送筒74先端の場合と同様に、第2良粒選別筒56の下端が第1昇降機16の搬送筒74先端に接続されると共に、上記第1昇降機16の搬送筒74先端開口の場合と同様に、閉鎖蓋76によって第2昇降機52の搬送筒74先端開口が閉鎖され、かつ、上記第2良粒選別筒56の下端下側の場合と同様に、第1良粒選別筒46の下端下側に良粒収集箱62が設けられている。
【0042】
以上により、供給ホッパ14に、上側から、穀粒Gが投入されることで、色彩選別機10に穀粒Gが供給され、かつ、供給ホッパ14へ投入された穀粒Gが、供給ホッパ14の排出口及び第2昇降機52の供給口を介して第2昇降機52の下端に供給されて、第2昇降機52によって第2昇降機52の上端まで搬送される。また、第2昇降機52の下端に供給された穀粒Gが第2昇降機52の搬送筒74先端開口から排出されることが閉鎖蓋76によって防止されている。
【0043】
さらに、第2良粒選別筒56からの良粒と判断された穀粒G(一次良粒)が、第1昇降機16の下端に搬送筒74を介して供給されて、第1昇降機16によって第1昇降機16の上端まで搬送される。また、第1昇降機16の供給口がシャッタ78によって閉鎖されることで、第1昇降機16の下端に供給された穀粒G(一次良粒)が第1昇降機16の供給口から排出されることが防止されている。
【0044】
しかも、良粒収集箱62には、第1良粒選別筒46から良粒と判断された穀粒G(二次良粒)が流入されて収集される。
【0045】
次に、本実施の形態の作用を説明する。
【0046】
以上の構成の色彩選別機10において穀粒Gの選別を行うためには、色彩選別機10の初期導入時又は定められた時間毎に、初期設定のためのティーチング処理を行う。すなわち、オペレータが操作パネル64の操作によって、又は定められた時間毎に自動的に、ティーチング処理の開始を指示すると、まずカメラ28によって所定の撮影対象領域が撮影され、カメラ28からの出力信号に基づいてティーチング処理が実施される。さらに、オペレータが操作パネル64の操作によって所望のしきい値率を指定した後、操作パネル64の操作でしきい値設定処理の開始を指示すると、しきい値設定処理が実行開始される。しきい値設定処理では、最初に上記ティーチング処理と同様に、カメラ28によって所定の撮影対象領域が撮影され、カメラ28からの出力信号に基づいてしきい値設定処理が行われる。
【0047】
次に、穀粒Gの色彩選別処理が実施される。
【0048】
図3及び図4に示す色彩選別機10の第1態様では、オペレータ又は穀粒投入機70によって、選別対象となる穀粒Gが、供給ホッパ14に投入されると、第1昇降機16によって搬送されて、第1タンク18に供給されることで、穀粒Gが、振動フィーダ20の第1送出部22に供給される。これにより、穀粒Gが、第1送出部22の前端から流下して、繰出ロール26の前側へ自由落下軌道Pに沿って自由落下する。
【0049】
自由落下軌道Pに沿って自由落下する穀粒Gは、前側からカメラ28によって撮影されて、良粒であるか不良粒であるかが判断されることで、良粒と判断された穀粒G(一次良粒)は自由落下軌道Pに沿って自由落下し続ける一方、不良粒と判断された穀粒G(一次不良粒)はエジェクタ40によって自由落下軌道Pから弾き出されて、穀粒Gが良粒と不良粒とに一次選別される。
【0050】
自由落下軌道Pから弾き出された穀粒G(一次不良粒)は、第1不良粒選別筒48に流入されて、第1不良粒収集箱50に収集される。
【0051】
自由落下軌道Pに沿って自由落下し続ける穀粒G(一次良粒)は、第1良粒選別筒46に流入されて、第2昇降機52によって搬送されることで、第2タンク54に供給されて、振動フィーダ20の第2送出部24に供給される。これにより、穀粒G(一次良粒)が、第2送出部24の前端から流下して、繰出ロール26の前側へ自由落下軌道Pに沿って自由落下する。
【0052】
自由落下軌道Pに沿って自由落下する穀粒G(一次良粒)は、前側からカメラ28によって撮影されて、良粒であるか不良粒であるかが判断されることで、良粒と判断された穀粒G(二次良粒)は自由落下軌道Pに沿って自由落下し続ける一方、不良粒と判断された穀粒G(二次不良粒)はエジェクタ40によって自由落下軌道Pから弾き出されて、穀粒Gが良粒と不良粒とに二次選別される。
【0053】
自由落下軌道Pから弾き出された穀粒G(二次不良粒)は、第2不良粒選別筒58に流入されて、第2不良粒収集箱60に収集される。
【0054】
自由落下軌道Pに沿って自由落下し続ける穀粒G(二次良粒)は、第2良粒選別筒56に流入されて、良粒収集箱62に収集される。
【0055】
本色彩選別機10の第1態様では、良粒収集箱62に収集された穀粒G(二次良粒)が良粒とされる一方、第1不良粒収集箱50及び第2不良粒収集箱60に収集された穀粒G(一次不良粒及び二次不良粒)が不良粒とされる。
【0056】
図5及び図6に示す色彩選別機10の第2態様では、オペレータ又は穀粒投入機70によって、選別対象となる穀粒Gが、供給ホッパ14に投入されると、第2昇降機52によって搬送されて、第2タンク54に供給されることで、穀粒Gが、振動フィーダ20の第2送出部24に供給される。これにより、穀粒Gが、第2送出部24の前端から流下して、繰出ロール26の前側へ自由落下軌道Pに沿って自由落下する。
【0057】
自由落下軌道Pに沿って自由落下する穀粒Gは、前側からカメラ28によって撮影されて、良粒であるか不良粒であるかが判断されることで、良粒と判断された穀粒G(一次良粒)は自由落下軌道Pに沿って自由落下し続ける一方、不良粒と判断された穀粒G(一次不良粒)はエジェクタ40によって自由落下軌道Pから弾き出されて、穀粒Gが良粒と不良粒とに一次選別される。
【0058】
自由落下軌道Pから弾き出された穀粒G(一次不良粒)は、第2不良粒選別筒58に流入されて、第2不良粒収集箱60に収集される。
【0059】
自由落下軌道Pに沿って自由落下し続ける穀粒G(一次良粒)は、第2良粒選別筒56に流入されて、第1昇降機16によって搬送されることで、第1タンク18に供給されて、振動フィーダ20の第1送出部22に供給される。これにより、穀粒G(一次良粒)が、第1送出部22の前端から流下して、繰出ロール26の前側へ自由落下軌道Pに沿って自由落下する。
【0060】
自由落下軌道Pに沿って自由落下する穀粒G(一次良粒)は、前側からカメラ28によって撮影されて、良粒であるか不良粒であるかが判断されることで、良粒と判断された穀粒G(二次良粒)は自由落下軌道Pに沿って自由落下し続ける一方、不良粒と判断された穀粒G(二次不良粒)はエジェクタ40によって自由落下軌道Pから弾き出されて、穀粒Gが良粒と不良粒とに二次選別される。
【0061】
自由落下軌道Pから弾き出された穀粒G(二次不良粒)は、第1不良粒選別筒48に流入されて、第1不良粒収集箱50に収集される。
【0062】
自由落下軌道Pに沿って自由落下し続ける穀粒G(二次良粒)は、第1良粒選別筒46に流入されて、良粒収集箱62に収集される。
【0063】
本色彩選別機10の第2態様では、良粒収集箱62に収集された穀粒G(二次良粒)が良粒とされる一方、第1不良粒収集箱50及び第2不良粒収集箱60に収集された穀粒G(一次不良粒及び二次不良粒)が不良粒とされる。
【0064】
以上により、本色彩選別機10の第1態様と第2態様との何れの場合でも、穀粒Gを2回選別することができるため、第1昇降機16及び第2昇降機52の何れに供給ホッパ14を取り付けてもよい。したがって、第1昇降機16に供給ホッパ14を取り付けるか第2昇降機52に供給ホッパ14を取り付けるかを選択することができ、色彩選別機10の設置場所のレイアウトに柔軟に対応することができる。
【0065】
しかも、操作パネル64は、色彩選別機10の前面上部の他に、色彩選別機10の右面上部及び左面上部にも設置可能にされている。このため、色彩選別機10の設置場所のレイアウトに一層柔軟に対応することができる。
【0066】
なお、本色彩選別機10では、穀粒Gの繰出ロール26からの自由落下軌道Pの前側にカメラ28を設けた構成としたが、穀粒Gの繰出ロール26からの自由落下軌道Pの前側及び後側にカメラ28を設けた構成としてもよい。この場合、後側のカメラ28の視野中心軸Qは傾斜されて穀粒Gの自由落下軌道Pへ向けられ、一対の蛍光灯36、38はカメラ28の視野中心軸Qに対して上側と下側とに対称配置される。
【0067】
また、本色彩選別機10では、本発明の粒体を穀粒Gとした構成としたが、本発明の粒体を造粒されたプラスチック片等とした構成としてもよい。
【図面の簡単な説明】
【0068】
【図1】本発明の実施の形態に係る色彩選別機を示す前斜め右側から見た斜視図である。
【図2】本発明の実施の形態に係る色彩選別機を示す上側から見た平面図である。
【図3】本発明の実施の形態に係る色彩選別機の第1態様を示す前側から見た模式図である。
【図4】本発明の実施の形態に係る色彩選別機の第1態様を示す右側から見た模式図である。
【図5】本発明の実施の形態に係る色彩選別機の第2態様を示す前側から見た模式図である。
【図6】本発明の実施の形態に係る色彩選別機の第2態様を示す右側から見た模式図である。
【符号の説明】
【0069】
10 色彩選別機(選別機)
12 カバー(周壁)
14 供給ホッパ(投入部)
16 第1昇降機(第1搬送手段)
28 カメラ(選別手段)
40 エジェクタ(選別手段)
46 第1良粒選別筒(搬送手段)
52 第2昇降機(第2搬送手段)
56 第2良粒選別筒(搬送手段)
64 操作パネル(操作部)
G 穀粒(粒体)
【特許請求の範囲】
【請求項1】
粒体が投入される投入部と、
供給された粒体を搬送可能にされ、前記投入部が取り付けられた際に前記投入部へ投入された粒体が供給される第1搬送手段と、
供給された粒体を搬送可能にされ、前記投入部が取り付けられた際に前記投入部へ投入された粒体が供給される第2搬送手段と、
前記第1搬送手段及び第2搬送手段により搬送された粒体を選別可能にされた選別手段と、
前記選別手段により選別された粒体を搬送して前記投入部からの粒体が供給されない前記第1搬送手段及び第2搬送手段の何れか一方へ供給する搬送手段と、
を備えた選別機。
【請求項2】
周壁に設置されると共に、設置位置を変更可能にされ、設定操作及び制御操作の少なくとも一方を可能にされた操作部を備えた、ことを特徴とする請求項1記載の選別機。
【請求項1】
粒体が投入される投入部と、
供給された粒体を搬送可能にされ、前記投入部が取り付けられた際に前記投入部へ投入された粒体が供給される第1搬送手段と、
供給された粒体を搬送可能にされ、前記投入部が取り付けられた際に前記投入部へ投入された粒体が供給される第2搬送手段と、
前記第1搬送手段及び第2搬送手段により搬送された粒体を選別可能にされた選別手段と、
前記選別手段により選別された粒体を搬送して前記投入部からの粒体が供給されない前記第1搬送手段及び第2搬送手段の何れか一方へ供給する搬送手段と、
を備えた選別機。
【請求項2】
周壁に設置されると共に、設置位置を変更可能にされ、設定操作及び制御操作の少なくとも一方を可能にされた操作部を備えた、ことを特徴とする請求項1記載の選別機。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2007−21382(P2007−21382A)
【公開日】平成19年2月1日(2007.2.1)
【国際特許分類】
【出願番号】特願2005−207702(P2005−207702)
【出願日】平成17年7月15日(2005.7.15)
【出願人】(000144898)株式会社山本製作所 (144)
【Fターム(参考)】
【公開日】平成19年2月1日(2007.2.1)
【国際特許分類】
【出願日】平成17年7月15日(2005.7.15)
【出願人】(000144898)株式会社山本製作所 (144)
【Fターム(参考)】
[ Back to top ]