
遺伝子配列解析装置および遺伝子配列解析方法
【課題】剛性が不明の作業台に設置された場合でも、簡易な構成で、性能を維持することができる遺伝子配列解析装置および遺伝子配列解析方法を提供する。
【解決手段】筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置であって、作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記分注ロボットに要する駆動力または前記ステージ移動に要する駆動力のうち少なくとも一方の上限値を計算する演算部と、前記分注ロボットに要する駆動力が前記上限値を上回る場合、前記分注ロボットに要する駆動力を抑制する分注ロボット制御部、または前記ステージ移動に要する駆動力が前記上限値を上回る場合、前記ステージの移動に要する駆動力を抑制するステージ制御部のうち少なくとも一方と、を備える。
【解決手段】筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置であって、作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記分注ロボットに要する駆動力または前記ステージ移動に要する駆動力のうち少なくとも一方の上限値を計算する演算部と、前記分注ロボットに要する駆動力が前記上限値を上回る場合、前記分注ロボットに要する駆動力を抑制する分注ロボット制御部、または前記ステージ移動に要する駆動力が前記上限値を上回る場合、前記ステージの移動に要する駆動力を抑制するステージ制御部のうち少なくとも一方と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、遺伝子配列解析装置および遺伝子配列解析方法に関し、例えば、筐体内に、試薬を分注する分注ロボットと、前記試薬を載置し、二次元に移動するステージと、前記試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置に関する。
【背景技術】
【0002】
遺伝子配列解析装置(以下、「DNAシーケンサー」という)は、DNAの塩基配列を決定する装置である。DNAシーケンサーでは、1ミクロンのビーズ上にDNAを固定し、エマルジョンPCRによりDNAを増幅させ、これらのビーズをフローセルのセルに固定し、セル内に試薬を送液し、DNAの伸長あるいはライゲーション反応によって蛍光基質をDNA鎖に取り込ませる。この操作により、フローセルに多数のビーズが固定されるため、励起光でフローセルの撮影領域を照射すると、ビーズから蛍光が発せられる。全ビーズの蛍光情報は、XYステージを逐次移動させ、CCDカメラでフローセルの撮影領域を撮影することによって得られる。このようにして得られた蛍光情報に基づき、DNAの塩基配列を決定する。
【0003】
DNAシーケンサーで行う塩基配列の決定を低コスト化するには、塩基配列を決定するまでの時間を短縮し、スループットを増加させることが求められる。また、スループットを増加させる一方、装置の性能は維持しなければならない。装置の性能を低下させる要因として、装置の振動が挙げられる。装置が振動すると、CCDカメラの位置とフローセルの位置との間に相対的な位置ずれが発生する。この状態のままフローセルを撮影すれば、CCDカメラの視野に散在する蛍光の位置がずれて撮影されるので、正確な蛍光情報が得られなくなる。また、試料をフローセルに注入する作業に支障が生じる。したがって、装置の性能を維持するには、装置の振動を抑制する必要がある。
【0004】
特許文献1には、装置の構造解析と特性評価を実施することで、所望の性能に達しない場合は設計データを修正し、短期間に所望の性能を実現するリソグラフィ装置が開示されている。
【0005】
特許文献2には、装置が設置される床を加振させることにより床構造の応答情報を測り、床の剛性が不足している場合には床構造を補強することで、所望の性能を実現するリソグラフィの製造方法が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3928200号公報
【特許文献2】特開2005−243887号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
蛍光の撮影中、DNAシーケンサーには、様々な要因で振動が発生する。例えば、装置に人がぶつかって発生する振動、オペレータが情報を入力することで発生する振動、装置内のステージ移動や分注動作によって発生する振動である。
【0008】
また、DNAシーケンサーは、一般的な研究室の作業台等に設置されることが多い。DNAシーケンサーが一般的な作業台に設置される場合、設置される作業台の剛性は不明である。例えば、作業台の剛性が大きいほど振動は起きにくいが、作業台の剛性が小さいほど、装置の振動は大きくなり、性能が低下する傾向がある。
【0009】
したがって、設置される作業台の剛性を問わず、装置の性能を維持しなければならない。
【0010】
上記特許文献1および2は、いずれも作業台の剛性を考慮していない。よって、剛性の小さい作業台に設置された場合は、振動により性能が低下するという問題がある。
【0011】
本発明は上記課題に鑑みてなされたものであり、剛性が不明の作業台に設置された場合でも、簡易な構成で、性能を維持することができる遺伝子配列解析装置および遺伝子配列解析方法を提供する。
【課題を解決するための手段】
【0012】
上記課題を解決するために本発明は、画像に生じる蛍光の位置ずれの許容値から機構の駆動力の上限値を求め、この上限値を上回らないように振動源となる機構を制御する。
【0013】
また、蛍光の位置ずれの許容値から筐体の加速度の上限値を求め、筐体に設置した加速度センサがこの上限値を上回るときは、所定の整定時間を待つか、振動源となる機構を制御する。
【0014】
すなわち、本発明は、筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置であって、作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記分注ロボットに要する駆動力または前記ステージ移動に要する駆動力のうち少なくとも一方の上限値を計算する演算部と、前記分注ロボットに要する駆動力が前記上限値を上回る場合、前記分注ロボットに要する駆動力を抑制する分注ロボット制御部、または前記ステージ移動に要する駆動力が前記上限値を上回る場合、前記ステージの移動に要する駆動力を抑制するステージ制御部のうち少なくとも一方と、を備えることを特徴とする。
【0015】
また、本発明は、筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置であって、作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記筐体の加速度の上限値を計算する演算部と、前記筐体の加速度を検出し、前記検出した加速度が前記上限値を上回る場合、所定の整定時間の経過を待つ加速度検出部と、を備えることを特徴とする。
【0016】
また、本発明は、筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置であって、作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記筐体の加速度の上限値を計算する演算部と、前記筐体の加速度を検出する加速度検出部と、前記加速度が前記上限値を上回る場合、前記分注ロボットに要する駆動力を抑制する分注ロボット制御部、または前記加速度が前記上限値を上回る場合、前記ステージの移動に要する駆動力を抑制するステージ制御部のうち少なくとも一方と、を備えることを特徴とする。
【発明の効果】
【0017】
剛性が不明の作業台に設置された場合でも、簡易な構成で、性能を維持することができる遺伝子配列解析装置および遺伝子配列解析方法を提供する。
【図面の簡単な説明】
【0018】
【図1】図1は、一般的なDNAシーケンサーの概略構成図である。
【図2】図2は、一般的な作業台201に設置された本発明の実施形態に係るDNAシーケンサーである。
【図3】図3は、本発明の実施形態に係るDNAシーケンサーのシミュレーションモデルである。
【図4】図4は、本発明の実施形態に係る固有角速度ωを求める概念図である。
【図5】図5は、分注ロボットの駆動力を制御することで画像に生じる蛍光の位置ずれを抑制する本発明の実施形態に係るフローチャートである。
【図6】図6は、筐体の加速度を検出することで画像に生じる蛍光の位置ずれを抑制する本発明の実施形態に係るフローチャートである。
【図7】図7は、筐体の加速度を検出することで画像に生じる蛍光の位置ずれを抑制する本発明の実施形態に係るフローチャートである。
【発明を実施するための形態】
【0019】
本発明は、筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置および遺伝子配列解析方法に関するものである。以下、添付図面を参照して本発明の実施形態について説明する。ただし、本実施形態は、本発明を実施するための一例に過ぎず、本発明の技術的範囲を限定するものではないことに注意すべきである。また、各図において共通の構成には同一の参照番号が付されている。
【0020】
<DNAシーケンサー>
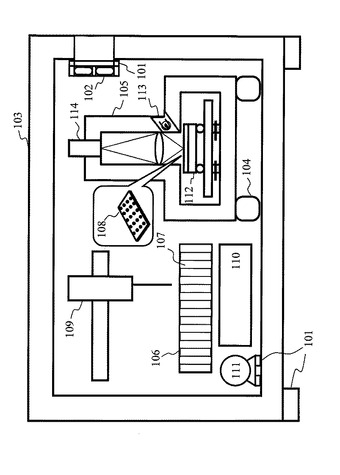
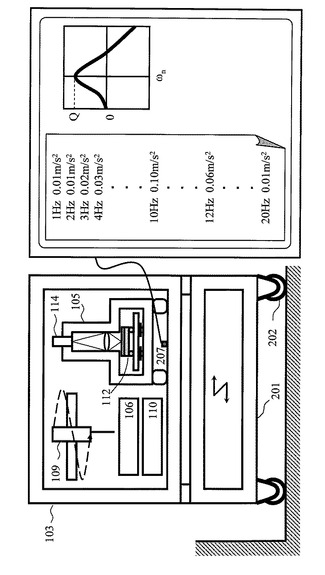
図1は、一般的なDNAシーケンサーの概略構成図である。DNAシーケンサーは、底部に防振ゴム101と側面に排熱ファン102を有する筐体103内に、除振マウント104上に設置された光学検出部105、試薬ラック106に並べられた試薬107を注入し、フローセル108に分注する分注ロボット109、使用済みの試薬を回収する廃液タンク110、底部に防振ゴム101を有し、試薬を送液するポンプ111を備える。光学検出部105は、フローセル108を載置するステージ112、ステージ112上の試薬を照射する光源113、試薬から発する蛍光を撮影するCCDカメラ等の画像取得装置114を備える。分注ロボット109およびステージ112は、分注ロボット移動装置およびステージ移動装置によって少なくとも水平方向に移動可能である。防振ゴム101は、常時駆動しているポンプ111、排熱ファン102からの振動が筐体103に接する他の機構に伝達されないように、振動を減衰させるものである。また、マウント104は、筐体からの振動が光学検出部に伝達されないように、振動を減衰させるものである。
【0021】
このDNAシーケンサーは、一般的な作業台に設置され、そこでDNA検出が行われる。このような使用環境で、特に問題になるのは、分注ロボット109の分注作業をしながら、または高速でステージ移動をしながら、フローセル上のビーズから発せられる蛍光を撮影するときである。作業台の剛性が低ければ、分注作業やステージ移動によって筐体に発生する振動が大きくなり、この振動によってCCDカメラの視野で蛍光の位置がずれ、正確な蛍光情報が得られなくなるためである。蛍光の位置ずれは、画像取得装置114の分解能に対して、充分に小さな値にする必要がある。例えば、画像取得装置114の分解能が0.38μmであれば、蛍光の位置ずれの許容値は0.1μm以下となる。
【0022】
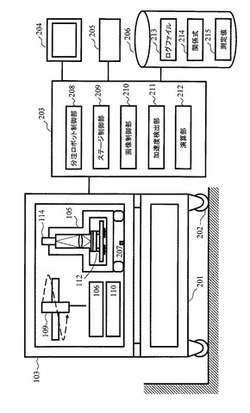
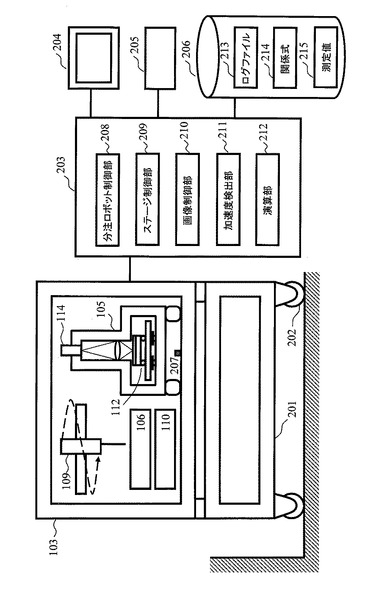
図2は、一般的な作業台201に設置された本発明の実施形態に係るDNAシーケンサーである。作業台201は、ゴム製のキャスタ202を有しており、キャスタ202を介して床に設置される。本発明のDNAシーケンサーは、DNAシーケンサを制御する制御手段203、制御手段203に接続された表示装置204、ポインティングデバイス205、および記憶装置206、筐体に設置された加速度センサ207を設けている。その他の構成は、特記しない限り図1と同じである。
【0023】
制御手段203は、分注ロボット移動装置の駆動力を制御する分注ロボット制御部208、ステージ移動装置を制御するステージ制御部209、画像取得装置114を制御する画像制御部210、加速度センサ207からの加速度を検出する加速度検出部211、所定の関係式を算出し、関係式に基づき計算を行う演算部212を備える。
【0024】
記憶装置206には、DNAシーケンサーによる検査中の操作履歴およびエラー履歴を記録したログファイル213、演算部212が算出した関係式214、および関係式に代入する測定値215が格納されている。
【0025】
<分注ロボットによる振動の影響>
ここでは、分注ロボットによって発生した振動が、蛍光の位置ずれをもたらす原理について説明する。
【0026】
この原理は、振動する機構とそれに接する機構との間には、所定のバネ定数および減衰定数があるとみなせるという概念に基づく。分注ロボット109は筐体103に設置されているため、分注ロボット109が駆動力を発生すれば、筐体103の振動は増幅し、所定の固有角周波数ωで振動する。また、分注ロボット109が駆動力を停止すれば筐体103の振動は減衰する。したがって、分注ロボット109と筐体103の間には、所定のバネ定数および減衰定数があるとみなせる。同様の理由で、筐体103と作業台201の間、筐体103と光学検出部105の間、光学検出部105とステージ112の間には、それぞれ所定のバネ定数および減衰定数があるとみなせる。
【0027】
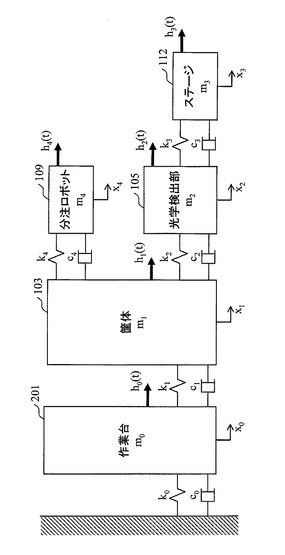
図3は、本発明の実施形態に係るDNAシーケンサーのシミュレーションモデルである。図示するように、各機構と機構のバネ定数および減衰定数については、床と作業台201の間をk0、c0、作業台201と筐体103の間をk1およびc1、筐体103と光学検出器105の間をk2およびc2、光学検出器105とステージ112の間をk3およびc3、筐体103と分注ロボット109の間をk4およびc4とする。各機構の質量については、作業台201をm0、筐体103をm1、光学検出器105をm2、ステージ112をm3、分注ロボット109をm4とする。各機構の中心座標からの変位については、作業台201をx0、筐体103をx1、光学検出器105をx2、ステージ112をx3、分注ロボット109をx4とする。各機構が発生する駆動力については、作業台201をh0、筐体103をh1、光学検出器105をh2、ステージ112をh3、分注ロボット109をh4とする。
【0028】
以上の設定に基づき、各機構ごとに運動方程式f0〜f4を立てると、次式(1)が成立する。
【0029】
【数1】

【0030】
この運動方程式を微分方程式によって解くため、駆動力h(t)を次式(2)のように置く。
【数2】
【0031】
式(2)より、式(3)が導ける。
【数3】
【0032】
ここで、変位Xおよび変位の位相差φは次式から求められる。
【数4】
【0033】
式(2)および(3)を式(1)に代入し、運動方程式を次式(5)のように書き換える。
【0034】
【数5】
【0035】
式(5)を行列に書き換えると次式(6)になる。
【数6】
【0036】
ここで、A〜Mは、次式(7)のように置いた。
【数7】
【0037】
式(6)の逆行列をN−1とおくと、次式(8)になる。
【数8】
【0038】
したがって、各機構の変位X0〜X4は、N−1の因子となるバネ定数k0〜k4、減衰定数c0〜c4、および各機構で共通の固有角速度ω、ならびに各機構の駆動力H0〜H4を求めることで、計算可能である。なお、X0〜X4は複素数で表記される。
【0039】
次に、バネ定数k、減衰定数c、および固有角速度ωの求め方について説明する。
図4は、本発明の実施形態に係る固有角速度ωを求める概念図である。固有角速度ωは、筐体103に設置された加速度センサ207によって、周波数ごとに測定する。分注ロボット109を一定の駆動力で動作させ、周波数を変えながら(たとえば1〜20Hz)、分注ロボット109を水平方向に正弦波駆動(スイープ加振)をさせる。周波数ごとの加速度測定結果から、加速度振幅が最大となる固有周波数fを求め、固有角速度ωを計算する。図4の場合は、固有周波数fは10Hz、固有角速度ωは62.8rad/sである。
【0040】
バネ定数kは、次式(9)により計算可能である。
【数9】
【0041】
次に、減衰係数cを求める。まず、加速度の測定結果から、固有周波数における共振倍率Qを求める。
【0042】
【数10】
【0043】
減衰比ζは、次式(11)から求められる。
【数11】
【0044】
また、作業台のキャスター(またはアジャスター)の設置面はゴムであることが多いので、減衰比ζをゴムの損失係数(η=0.1)から求めても良い。この場合、減衰比は次式(11)のようになる。
【0045】
【数12】
【0046】
減衰係数cは、減衰比ζを求めた後、次式により計算可能である。
【数13】
【0047】
以上の式から求めた各パラメータの値の一例を挙げておく。
作業台の固有周波数 f=10Hz
作業台の固有角速度 ω= 2πf= 62.8 (rad/s)
作業台の質量 m1=100(kg)
作業台のばね定数 k1=400(kN/m)
作業台の共振倍率 Q=0.1/0.01=10
作業台の減衰比 ζ=0.05
作業台の減衰係数 c1=1900(N/(m/s))
【0048】
<第1の実施形態>
画像の撮影中でも、分注ロボットは分注作業を行っている。分注ロボットからの振動は、筐体103、光学検出部105(画像取得装置114)、ステージ112の順に伝わる。したがって、画像取得装置114とステージ112との間に相対的な位置ずれが発生し、これによって画像取得装置114が撮影する時に蛍光の位置がずれる。
【0049】
ここでは、式(7)を用いて、分注ロボット109の駆動力h4(t)と蛍光の位置ずれの関係式を求める。この関係式に位置ずれの許容値を代入し、分注ロボット109の駆動力の上限値h4maxを計算する。よって、撮影中、分注ロボット109の駆動力が上限値h4max以上とならないように、振動源となる分注ロボット109の駆動力を制御すれば、位置ずれは許容値を満足する。以下、分注ロボットの駆動力h4(t)と位置ずれの関係式(15)を導出する。
【0050】
蛍光の位置ずれは、ステージの変位と光学検出器の変位との差(x3−x2)に等しいとみなせる。また、分注ロボット以外の機構は駆動力を発生しないとし、H0〜H3=0とする。これと、式(2)および(8)から、次式(14)が求まる。ここで、B(ω)は、kおよびcの関数とする。
【0051】
【数14】
【0052】
また、式(3)より、次式(15)が求まる。
【数15】
【0053】
式(14)および(15)より、次式(16)が導ける。
【数16】
【0054】
ここで、X2〜X4およびB(ω)は、式(8)またはk、c、ωにより計算可能である。したがって、式(16)に、ステージの変位と光学検出器の変位との差(x3−x2)の許容値(例えば0.1μm)を代入すれば、分注ロボットの駆動力h4(t)の上限値が計算可能である。
【0055】
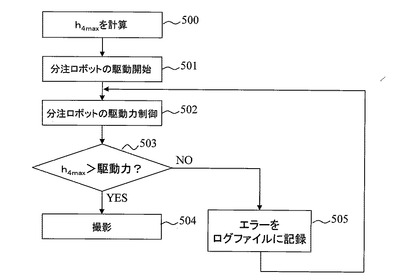
図5は、分注ロボット109の駆動力を制御することで画像ずれを抑制するフローチャートである。
【0056】
S500では、演算部212が、式(16)等を用いて、分注ロボット109の駆動力h4(t)の上限値h4maxを計算する。ステージ112の変位と光学検出器105の変位との差(x3−x2)は、ユーザが入力するか、演算部212が画像の分解能から計算する。また、固有角速度ω、バネ定数k、減衰定数cは、予め値が分かっている場合はその値を式(16)に代入するが、値が分からなければ次のように求める。まず、分注ロボット制御部208が、分注ロボット109を一定の駆動力で動作させ、周波数を変えながら、分注ロボット109を水平方向に正弦波駆動(スイープ加振)させる。次に、加速度検出部211が、筐体に設けた加速度センサ207により、周波数ごとの加速度測定結果を求める。そして、演算部212が、加速度振幅が最大となる固有周波数fを求め、固有角速度ω、バネ定数k、減衰定数cを計算する。
【0057】
S501およびS502では、分注ロボット制御部208が、分注ロボット109の駆動を開始し、駆動力を制御する。分注ロボット109は、例えばタイミングベルトを介してパルスモータにより制御される。
【0058】
S503では、分注ロボット制御部208が、予め計算した上限値h4maxと駆動力とを比較する。駆動力が上限値h4maxより小さければ、S504に進む。駆動力が上限値h4max以上であれば、S505に進む。
【0059】
S504では、画像制御部210が、画像取得装置114による撮影をする。
S505では、分注ロボット制御部208が、駆動力超過のエラーをログファイル213に記録する。その後、S502に戻り、分注ロボット制御部208が、駆動力が小さくなるように分注ロボット109を制御する。
【0060】
以上の通り、本実施形態では、式(16)にステージ112の変位と光学検出器105の変位との差(x3−x2)、固有角速度ω、バネ定数k、減衰定数cを代入し、分注ロボット109の駆動力の上限値h4maxを計算する。そして、分注ロボット109の駆動力が上限値h4max以上とならないように、振動源となる分注ロボット109の駆動力を制御する。また、撮影中に分注ロボット109の駆動力が上限値を超える場合には、駆動力超過のエラーをログファイル213に記録する。
【0061】
これにより、分注ロボットによる分注作業を行いながら画像を撮影しても、画像ずれを許容値以内に抑えることが可能となる。また、ログファイルを参照すれば、撮影した画像と、駆動力超過との因果関係を確認することができる。
【0062】
したがって、剛性が不明の作業台に設置されたDNAシーケンサーの性能を維持することができる。また、画像の取得に失敗する回数が低減されるので、高価な試薬と検査時間を費やさなくてすむ。
【0063】
なお、ここでは、分注ロボットの駆動力を制御する方法について述べたが、式(7)に基づき、その他の振動源となる機構の駆動力を制御しても良い。例えば、ステージ移動装置の駆動力h3(t)も制御可能である。
【0064】
<第2の実施形態>
画像の撮影中でも、装置に人がぶつかったり、オペレータが情報を入力したりすることによって装置に振動が発生している。装置に発生した振動は、筐体103を介して、光学検出部105(画像取得装置114)およびステージ112に伝わる。したがって、画像取得装置114とステージ112との間に相対的な位置ずれが発生し、これによって画像取得装置114が撮影する画像にずれが発生する。
【0065】
ここでは、式(7)を用いて、筐体の加速度a1(t)と画像ずれの関係式を求める。この関係式に画像ずれの許容値を代入し、筐体103の加速度の上限値a1maxを計算する。よって、撮影中、筐体103に設置した加速度センサ207が上限値a1max以上を検出した場合は、加速度が上限値a1maxを下回るまで画像取得装置114の撮影を停止する。これにより、画像ずれは許容値を満足する。以下、筐体103の加速度a1(t)と画像ずれの関係式(19)を導出する。
【0066】
画像ずれは、ステージ112の変位と光学検出器105の変位との差(x3−x2)に等しいとみなせる。また、式(3)から、次式(17)および(18)が求まる。
【0067】
【数17】
【0068】
【数18】
【0069】
式(17)および(18)から、次式(19)が求まる。
【数19】
【0070】
ここで、ωは測定から求め、X1〜X3は式(7)により計算可能である。したがって、式(19)に、ステージの変位と光学検出器105の変位との差(x3−x2)の許容値(例えば0.1μm)を代入すれば、筐体103の加速度a1(t)の上限値が計算可能である。
【0071】
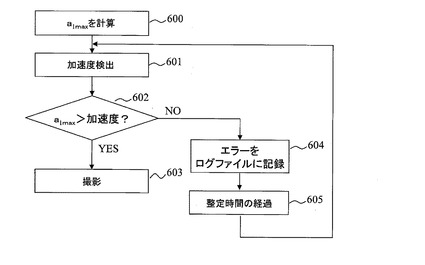
図6は、筐体103の加速度を検出することで画像ずれを抑制するフローチャートである。
【0072】
S600では、演算部212が、式(19)等を用いて、筐体103の加速度a1(t)の上限値をa1max計算する。なお、ステージ112の変位と光学検出器105の変位との差(x3−x2)は、ユーザが入力してもよいし、演算部212が画像の分解能から計算しても良い。固有角速度ω、バネ定数k、減衰定数cは、前述のS500で説明したとおりである。
【0073】
S601および602では、加速度検出部211が、筐体103の加速度を検出し、予め計算した上限値a1maxと検出した加速度を比較する。検出した加速度が上限値より小さければ、S603に進む。検出した加速度が上限値以上になれば、S604に進む。
【0074】
S603では、画像制御部210が、画像取得装置114による撮影をする。
S604では、加速度検出部211が、加速度超過のエラーをログファイル213に記録する。
【0075】
S605では、加速度検出部211が、所定の整定時間の経過を待った後、S601に戻り、再度筐体の加速度を検出する。ここで整定時間とは、例えば、筐体103の固有周波数fから求めた周期の定数倍に設定してもよいし、タイマー等で任意の時間に設定してもよい。なお、所定の整定時間の経過を待たずに、検査を中止してもよい。
【0076】
以上の通り、本実施形態では、式(19)にステージ112の変位と光学検出器105の変位との差(x3−x2)、固有角速度ω、バネ定数k、減衰定数cを代入し、筐体103の加速度の上限値a1maxを計算する。そして、筐体に設置した加速度センサが上限値a1max以上を検出した場合は、加速度が上限値a1maxを下回るまで画像取得装置114の撮影を停止する。また、撮影中に筐体103の加速度が上限値を超える場合には、加速度超過のエラーをログファイル213に記録する。
【0077】
これにより、装置に人がぶつかったり、オペレータが情報を入力したりすることによって装置に振動が発生しても、画像ずれを許容値以内に抑えることが可能となる。また、ログファイルを参照すれば、撮影した画像と、加速度超過との因果関係を確認することができる。
【0078】
したがって、剛性が不明の作業台に設置されたDNAシーケンサーの性能を維持することができる。また、画像の取得に失敗する回数が低減されるので、高価な試薬と検査時間を費やさなくてすむ。
【0079】
<第3の実施形態>
画像の撮影中でも、分注ロボット109の分注作業、ステージ移動等によって振動が発生している。各機構からの振動は、筐体103を介して、光学検出部105(画像取得装置114)およびステージ112に伝わる。したがって、画像取得装置114とステージ112の間に相対的な位置ずれが発生し、これによって画像取得装置114が撮影する画像にずれが発生する。
【0080】
ここでは、式(8)を用いて、筐体103の加速度a1(t)と画像ずれの関係式を求める。この関係式に画像ずれの許容値を代入し、筐体103の加速度の上限値a1maxを計算する。よって、撮影中、筐体103に設置した加速度センサ207が上限値a1max以上を検出した場合は、加速度が上限値a1maxを下回るまで画像取得装置114の撮影を停止する。これにより、画像ずれは許容値を満足する。以下、筐体103の加速度a1(t)と画像ずれの関係式(19)を導出する。
【0081】
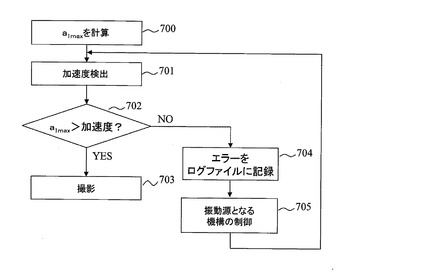
図7は、筐体の加速度を検出することで画像ずれを抑制するフローチャートである。ここでは、S705の処理のみが、図6のS605と異なる。
【0082】
S705では、ステージ制御部209または分注ロボット制御部208が、振動源となるステージ移動装置または分注ロボット移動装置等の駆動力が小さくなるように制御する。ステージ移動装置の制御は、例えば、(パルス信号で制御された)パルスモータの回転角変位をボールネジにより直線変位に変換して駆動位置決めを行う方法が挙げられる。分注ロボットの制御は、例えば、パルスモータの回転角変位をタイミングベルトにより直線変位に変換して駆動位置決めする方法が挙げられる。
【0083】
以上の通り、本実施形態では、式(19)にステージ112の変位と光学検出器105の変位との差(x3−x2)、固有角速度ω、バネ定数k、減衰定数cを代入し、筐体103の加速度の上限値a1maxを計算する。そして、筐体103の加速度が上限値a1max以上とならないように、振動源となるステージ移動装置または分注ロボット移動装置の駆動力を制御する。また、撮影中に筐体103の加速度が上限値を超える場合には、加速度超過のエラーをログファイルに記録する。
【0084】
これにより、分注ロボット109による分注作業を行いながら、画像を撮影しても、蛍光の位置ずれを許容値以内に抑えることが可能となる。また、ステージ移動を行った後、装置が完全に停止するまで待たなくても、迅速に画像を撮影することができ、蛍光の位置ずれを許容値以内に抑えることが可能となる。また、ログファイル213を参照すれば、撮影した画像と、加速度超過との因果関係を確認することができる。
【0085】
したがって、剛性が不明の作業台に設置されたDNAシーケンサーの性能を維持することができる。また、画像の取得に失敗する回数が低減されるので、高価な試薬と検査時間を費やさなくてすむ。
【符号の説明】
【0086】
103・・・筐体
105・・・光学検出部
106・・・試薬ラック
109・・・分注ロボット
110・・・廃液タンク
112・・・ステージ
114・・・画像取得部
201・・・作業台
202・・・キャスター
203・・・制御手段
204・・・表示装置
205・・・ポインティングデバイス
206・・・記憶装置
207・・・加速度センサ
208・・・分注ロボット制御部
209・・・ステージ制御部
210・・・画像制御部
211・・・加速度検出部
212・・・演算部
213・・・ログファイル
214・・・関係式
【技術分野】
【0001】
本発明は、遺伝子配列解析装置および遺伝子配列解析方法に関し、例えば、筐体内に、試薬を分注する分注ロボットと、前記試薬を載置し、二次元に移動するステージと、前記試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置に関する。
【背景技術】
【0002】
遺伝子配列解析装置(以下、「DNAシーケンサー」という)は、DNAの塩基配列を決定する装置である。DNAシーケンサーでは、1ミクロンのビーズ上にDNAを固定し、エマルジョンPCRによりDNAを増幅させ、これらのビーズをフローセルのセルに固定し、セル内に試薬を送液し、DNAの伸長あるいはライゲーション反応によって蛍光基質をDNA鎖に取り込ませる。この操作により、フローセルに多数のビーズが固定されるため、励起光でフローセルの撮影領域を照射すると、ビーズから蛍光が発せられる。全ビーズの蛍光情報は、XYステージを逐次移動させ、CCDカメラでフローセルの撮影領域を撮影することによって得られる。このようにして得られた蛍光情報に基づき、DNAの塩基配列を決定する。
【0003】
DNAシーケンサーで行う塩基配列の決定を低コスト化するには、塩基配列を決定するまでの時間を短縮し、スループットを増加させることが求められる。また、スループットを増加させる一方、装置の性能は維持しなければならない。装置の性能を低下させる要因として、装置の振動が挙げられる。装置が振動すると、CCDカメラの位置とフローセルの位置との間に相対的な位置ずれが発生する。この状態のままフローセルを撮影すれば、CCDカメラの視野に散在する蛍光の位置がずれて撮影されるので、正確な蛍光情報が得られなくなる。また、試料をフローセルに注入する作業に支障が生じる。したがって、装置の性能を維持するには、装置の振動を抑制する必要がある。
【0004】
特許文献1には、装置の構造解析と特性評価を実施することで、所望の性能に達しない場合は設計データを修正し、短期間に所望の性能を実現するリソグラフィ装置が開示されている。
【0005】
特許文献2には、装置が設置される床を加振させることにより床構造の応答情報を測り、床の剛性が不足している場合には床構造を補強することで、所望の性能を実現するリソグラフィの製造方法が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3928200号公報
【特許文献2】特開2005−243887号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
蛍光の撮影中、DNAシーケンサーには、様々な要因で振動が発生する。例えば、装置に人がぶつかって発生する振動、オペレータが情報を入力することで発生する振動、装置内のステージ移動や分注動作によって発生する振動である。
【0008】
また、DNAシーケンサーは、一般的な研究室の作業台等に設置されることが多い。DNAシーケンサーが一般的な作業台に設置される場合、設置される作業台の剛性は不明である。例えば、作業台の剛性が大きいほど振動は起きにくいが、作業台の剛性が小さいほど、装置の振動は大きくなり、性能が低下する傾向がある。
【0009】
したがって、設置される作業台の剛性を問わず、装置の性能を維持しなければならない。
【0010】
上記特許文献1および2は、いずれも作業台の剛性を考慮していない。よって、剛性の小さい作業台に設置された場合は、振動により性能が低下するという問題がある。
【0011】
本発明は上記課題に鑑みてなされたものであり、剛性が不明の作業台に設置された場合でも、簡易な構成で、性能を維持することができる遺伝子配列解析装置および遺伝子配列解析方法を提供する。
【課題を解決するための手段】
【0012】
上記課題を解決するために本発明は、画像に生じる蛍光の位置ずれの許容値から機構の駆動力の上限値を求め、この上限値を上回らないように振動源となる機構を制御する。
【0013】
また、蛍光の位置ずれの許容値から筐体の加速度の上限値を求め、筐体に設置した加速度センサがこの上限値を上回るときは、所定の整定時間を待つか、振動源となる機構を制御する。
【0014】
すなわち、本発明は、筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置であって、作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記分注ロボットに要する駆動力または前記ステージ移動に要する駆動力のうち少なくとも一方の上限値を計算する演算部と、前記分注ロボットに要する駆動力が前記上限値を上回る場合、前記分注ロボットに要する駆動力を抑制する分注ロボット制御部、または前記ステージ移動に要する駆動力が前記上限値を上回る場合、前記ステージの移動に要する駆動力を抑制するステージ制御部のうち少なくとも一方と、を備えることを特徴とする。
【0015】
また、本発明は、筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置であって、作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記筐体の加速度の上限値を計算する演算部と、前記筐体の加速度を検出し、前記検出した加速度が前記上限値を上回る場合、所定の整定時間の経過を待つ加速度検出部と、を備えることを特徴とする。
【0016】
また、本発明は、筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置であって、作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記筐体の加速度の上限値を計算する演算部と、前記筐体の加速度を検出する加速度検出部と、前記加速度が前記上限値を上回る場合、前記分注ロボットに要する駆動力を抑制する分注ロボット制御部、または前記加速度が前記上限値を上回る場合、前記ステージの移動に要する駆動力を抑制するステージ制御部のうち少なくとも一方と、を備えることを特徴とする。
【発明の効果】
【0017】
剛性が不明の作業台に設置された場合でも、簡易な構成で、性能を維持することができる遺伝子配列解析装置および遺伝子配列解析方法を提供する。
【図面の簡単な説明】
【0018】
【図1】図1は、一般的なDNAシーケンサーの概略構成図である。
【図2】図2は、一般的な作業台201に設置された本発明の実施形態に係るDNAシーケンサーである。
【図3】図3は、本発明の実施形態に係るDNAシーケンサーのシミュレーションモデルである。
【図4】図4は、本発明の実施形態に係る固有角速度ωを求める概念図である。
【図5】図5は、分注ロボットの駆動力を制御することで画像に生じる蛍光の位置ずれを抑制する本発明の実施形態に係るフローチャートである。
【図6】図6は、筐体の加速度を検出することで画像に生じる蛍光の位置ずれを抑制する本発明の実施形態に係るフローチャートである。
【図7】図7は、筐体の加速度を検出することで画像に生じる蛍光の位置ずれを抑制する本発明の実施形態に係るフローチャートである。
【発明を実施するための形態】
【0019】
本発明は、筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置および遺伝子配列解析方法に関するものである。以下、添付図面を参照して本発明の実施形態について説明する。ただし、本実施形態は、本発明を実施するための一例に過ぎず、本発明の技術的範囲を限定するものではないことに注意すべきである。また、各図において共通の構成には同一の参照番号が付されている。
【0020】
<DNAシーケンサー>
図1は、一般的なDNAシーケンサーの概略構成図である。DNAシーケンサーは、底部に防振ゴム101と側面に排熱ファン102を有する筐体103内に、除振マウント104上に設置された光学検出部105、試薬ラック106に並べられた試薬107を注入し、フローセル108に分注する分注ロボット109、使用済みの試薬を回収する廃液タンク110、底部に防振ゴム101を有し、試薬を送液するポンプ111を備える。光学検出部105は、フローセル108を載置するステージ112、ステージ112上の試薬を照射する光源113、試薬から発する蛍光を撮影するCCDカメラ等の画像取得装置114を備える。分注ロボット109およびステージ112は、分注ロボット移動装置およびステージ移動装置によって少なくとも水平方向に移動可能である。防振ゴム101は、常時駆動しているポンプ111、排熱ファン102からの振動が筐体103に接する他の機構に伝達されないように、振動を減衰させるものである。また、マウント104は、筐体からの振動が光学検出部に伝達されないように、振動を減衰させるものである。
【0021】
このDNAシーケンサーは、一般的な作業台に設置され、そこでDNA検出が行われる。このような使用環境で、特に問題になるのは、分注ロボット109の分注作業をしながら、または高速でステージ移動をしながら、フローセル上のビーズから発せられる蛍光を撮影するときである。作業台の剛性が低ければ、分注作業やステージ移動によって筐体に発生する振動が大きくなり、この振動によってCCDカメラの視野で蛍光の位置がずれ、正確な蛍光情報が得られなくなるためである。蛍光の位置ずれは、画像取得装置114の分解能に対して、充分に小さな値にする必要がある。例えば、画像取得装置114の分解能が0.38μmであれば、蛍光の位置ずれの許容値は0.1μm以下となる。
【0022】
図2は、一般的な作業台201に設置された本発明の実施形態に係るDNAシーケンサーである。作業台201は、ゴム製のキャスタ202を有しており、キャスタ202を介して床に設置される。本発明のDNAシーケンサーは、DNAシーケンサを制御する制御手段203、制御手段203に接続された表示装置204、ポインティングデバイス205、および記憶装置206、筐体に設置された加速度センサ207を設けている。その他の構成は、特記しない限り図1と同じである。
【0023】
制御手段203は、分注ロボット移動装置の駆動力を制御する分注ロボット制御部208、ステージ移動装置を制御するステージ制御部209、画像取得装置114を制御する画像制御部210、加速度センサ207からの加速度を検出する加速度検出部211、所定の関係式を算出し、関係式に基づき計算を行う演算部212を備える。
【0024】
記憶装置206には、DNAシーケンサーによる検査中の操作履歴およびエラー履歴を記録したログファイル213、演算部212が算出した関係式214、および関係式に代入する測定値215が格納されている。
【0025】
<分注ロボットによる振動の影響>
ここでは、分注ロボットによって発生した振動が、蛍光の位置ずれをもたらす原理について説明する。
【0026】
この原理は、振動する機構とそれに接する機構との間には、所定のバネ定数および減衰定数があるとみなせるという概念に基づく。分注ロボット109は筐体103に設置されているため、分注ロボット109が駆動力を発生すれば、筐体103の振動は増幅し、所定の固有角周波数ωで振動する。また、分注ロボット109が駆動力を停止すれば筐体103の振動は減衰する。したがって、分注ロボット109と筐体103の間には、所定のバネ定数および減衰定数があるとみなせる。同様の理由で、筐体103と作業台201の間、筐体103と光学検出部105の間、光学検出部105とステージ112の間には、それぞれ所定のバネ定数および減衰定数があるとみなせる。
【0027】
図3は、本発明の実施形態に係るDNAシーケンサーのシミュレーションモデルである。図示するように、各機構と機構のバネ定数および減衰定数については、床と作業台201の間をk0、c0、作業台201と筐体103の間をk1およびc1、筐体103と光学検出器105の間をk2およびc2、光学検出器105とステージ112の間をk3およびc3、筐体103と分注ロボット109の間をk4およびc4とする。各機構の質量については、作業台201をm0、筐体103をm1、光学検出器105をm2、ステージ112をm3、分注ロボット109をm4とする。各機構の中心座標からの変位については、作業台201をx0、筐体103をx1、光学検出器105をx2、ステージ112をx3、分注ロボット109をx4とする。各機構が発生する駆動力については、作業台201をh0、筐体103をh1、光学検出器105をh2、ステージ112をh3、分注ロボット109をh4とする。
【0028】
以上の設定に基づき、各機構ごとに運動方程式f0〜f4を立てると、次式(1)が成立する。
【0029】
【数1】
【0030】
この運動方程式を微分方程式によって解くため、駆動力h(t)を次式(2)のように置く。
【数2】
【0031】
式(2)より、式(3)が導ける。
【数3】
【0032】
ここで、変位Xおよび変位の位相差φは次式から求められる。
【数4】
【0033】
式(2)および(3)を式(1)に代入し、運動方程式を次式(5)のように書き換える。
【0034】
【数5】
【0035】
式(5)を行列に書き換えると次式(6)になる。
【数6】
【0036】
ここで、A〜Mは、次式(7)のように置いた。
【数7】
【0037】
式(6)の逆行列をN−1とおくと、次式(8)になる。
【数8】
【0038】
したがって、各機構の変位X0〜X4は、N−1の因子となるバネ定数k0〜k4、減衰定数c0〜c4、および各機構で共通の固有角速度ω、ならびに各機構の駆動力H0〜H4を求めることで、計算可能である。なお、X0〜X4は複素数で表記される。
【0039】
次に、バネ定数k、減衰定数c、および固有角速度ωの求め方について説明する。
図4は、本発明の実施形態に係る固有角速度ωを求める概念図である。固有角速度ωは、筐体103に設置された加速度センサ207によって、周波数ごとに測定する。分注ロボット109を一定の駆動力で動作させ、周波数を変えながら(たとえば1〜20Hz)、分注ロボット109を水平方向に正弦波駆動(スイープ加振)をさせる。周波数ごとの加速度測定結果から、加速度振幅が最大となる固有周波数fを求め、固有角速度ωを計算する。図4の場合は、固有周波数fは10Hz、固有角速度ωは62.8rad/sである。
【0040】
バネ定数kは、次式(9)により計算可能である。
【数9】
【0041】
次に、減衰係数cを求める。まず、加速度の測定結果から、固有周波数における共振倍率Qを求める。
【0042】
【数10】
【0043】
減衰比ζは、次式(11)から求められる。
【数11】
【0044】
また、作業台のキャスター(またはアジャスター)の設置面はゴムであることが多いので、減衰比ζをゴムの損失係数(η=0.1)から求めても良い。この場合、減衰比は次式(11)のようになる。
【0045】
【数12】
【0046】
減衰係数cは、減衰比ζを求めた後、次式により計算可能である。
【数13】
【0047】
以上の式から求めた各パラメータの値の一例を挙げておく。
作業台の固有周波数 f=10Hz
作業台の固有角速度 ω= 2πf= 62.8 (rad/s)
作業台の質量 m1=100(kg)
作業台のばね定数 k1=400(kN/m)
作業台の共振倍率 Q=0.1/0.01=10
作業台の減衰比 ζ=0.05
作業台の減衰係数 c1=1900(N/(m/s))
【0048】
<第1の実施形態>
画像の撮影中でも、分注ロボットは分注作業を行っている。分注ロボットからの振動は、筐体103、光学検出部105(画像取得装置114)、ステージ112の順に伝わる。したがって、画像取得装置114とステージ112との間に相対的な位置ずれが発生し、これによって画像取得装置114が撮影する時に蛍光の位置がずれる。
【0049】
ここでは、式(7)を用いて、分注ロボット109の駆動力h4(t)と蛍光の位置ずれの関係式を求める。この関係式に位置ずれの許容値を代入し、分注ロボット109の駆動力の上限値h4maxを計算する。よって、撮影中、分注ロボット109の駆動力が上限値h4max以上とならないように、振動源となる分注ロボット109の駆動力を制御すれば、位置ずれは許容値を満足する。以下、分注ロボットの駆動力h4(t)と位置ずれの関係式(15)を導出する。
【0050】
蛍光の位置ずれは、ステージの変位と光学検出器の変位との差(x3−x2)に等しいとみなせる。また、分注ロボット以外の機構は駆動力を発生しないとし、H0〜H3=0とする。これと、式(2)および(8)から、次式(14)が求まる。ここで、B(ω)は、kおよびcの関数とする。
【0051】
【数14】
【0052】
また、式(3)より、次式(15)が求まる。
【数15】
【0053】
式(14)および(15)より、次式(16)が導ける。
【数16】
【0054】
ここで、X2〜X4およびB(ω)は、式(8)またはk、c、ωにより計算可能である。したがって、式(16)に、ステージの変位と光学検出器の変位との差(x3−x2)の許容値(例えば0.1μm)を代入すれば、分注ロボットの駆動力h4(t)の上限値が計算可能である。
【0055】
図5は、分注ロボット109の駆動力を制御することで画像ずれを抑制するフローチャートである。
【0056】
S500では、演算部212が、式(16)等を用いて、分注ロボット109の駆動力h4(t)の上限値h4maxを計算する。ステージ112の変位と光学検出器105の変位との差(x3−x2)は、ユーザが入力するか、演算部212が画像の分解能から計算する。また、固有角速度ω、バネ定数k、減衰定数cは、予め値が分かっている場合はその値を式(16)に代入するが、値が分からなければ次のように求める。まず、分注ロボット制御部208が、分注ロボット109を一定の駆動力で動作させ、周波数を変えながら、分注ロボット109を水平方向に正弦波駆動(スイープ加振)させる。次に、加速度検出部211が、筐体に設けた加速度センサ207により、周波数ごとの加速度測定結果を求める。そして、演算部212が、加速度振幅が最大となる固有周波数fを求め、固有角速度ω、バネ定数k、減衰定数cを計算する。
【0057】
S501およびS502では、分注ロボット制御部208が、分注ロボット109の駆動を開始し、駆動力を制御する。分注ロボット109は、例えばタイミングベルトを介してパルスモータにより制御される。
【0058】
S503では、分注ロボット制御部208が、予め計算した上限値h4maxと駆動力とを比較する。駆動力が上限値h4maxより小さければ、S504に進む。駆動力が上限値h4max以上であれば、S505に進む。
【0059】
S504では、画像制御部210が、画像取得装置114による撮影をする。
S505では、分注ロボット制御部208が、駆動力超過のエラーをログファイル213に記録する。その後、S502に戻り、分注ロボット制御部208が、駆動力が小さくなるように分注ロボット109を制御する。
【0060】
以上の通り、本実施形態では、式(16)にステージ112の変位と光学検出器105の変位との差(x3−x2)、固有角速度ω、バネ定数k、減衰定数cを代入し、分注ロボット109の駆動力の上限値h4maxを計算する。そして、分注ロボット109の駆動力が上限値h4max以上とならないように、振動源となる分注ロボット109の駆動力を制御する。また、撮影中に分注ロボット109の駆動力が上限値を超える場合には、駆動力超過のエラーをログファイル213に記録する。
【0061】
これにより、分注ロボットによる分注作業を行いながら画像を撮影しても、画像ずれを許容値以内に抑えることが可能となる。また、ログファイルを参照すれば、撮影した画像と、駆動力超過との因果関係を確認することができる。
【0062】
したがって、剛性が不明の作業台に設置されたDNAシーケンサーの性能を維持することができる。また、画像の取得に失敗する回数が低減されるので、高価な試薬と検査時間を費やさなくてすむ。
【0063】
なお、ここでは、分注ロボットの駆動力を制御する方法について述べたが、式(7)に基づき、その他の振動源となる機構の駆動力を制御しても良い。例えば、ステージ移動装置の駆動力h3(t)も制御可能である。
【0064】
<第2の実施形態>
画像の撮影中でも、装置に人がぶつかったり、オペレータが情報を入力したりすることによって装置に振動が発生している。装置に発生した振動は、筐体103を介して、光学検出部105(画像取得装置114)およびステージ112に伝わる。したがって、画像取得装置114とステージ112との間に相対的な位置ずれが発生し、これによって画像取得装置114が撮影する画像にずれが発生する。
【0065】
ここでは、式(7)を用いて、筐体の加速度a1(t)と画像ずれの関係式を求める。この関係式に画像ずれの許容値を代入し、筐体103の加速度の上限値a1maxを計算する。よって、撮影中、筐体103に設置した加速度センサ207が上限値a1max以上を検出した場合は、加速度が上限値a1maxを下回るまで画像取得装置114の撮影を停止する。これにより、画像ずれは許容値を満足する。以下、筐体103の加速度a1(t)と画像ずれの関係式(19)を導出する。
【0066】
画像ずれは、ステージ112の変位と光学検出器105の変位との差(x3−x2)に等しいとみなせる。また、式(3)から、次式(17)および(18)が求まる。
【0067】
【数17】
【0068】
【数18】
【0069】
式(17)および(18)から、次式(19)が求まる。
【数19】
【0070】
ここで、ωは測定から求め、X1〜X3は式(7)により計算可能である。したがって、式(19)に、ステージの変位と光学検出器105の変位との差(x3−x2)の許容値(例えば0.1μm)を代入すれば、筐体103の加速度a1(t)の上限値が計算可能である。
【0071】
図6は、筐体103の加速度を検出することで画像ずれを抑制するフローチャートである。
【0072】
S600では、演算部212が、式(19)等を用いて、筐体103の加速度a1(t)の上限値をa1max計算する。なお、ステージ112の変位と光学検出器105の変位との差(x3−x2)は、ユーザが入力してもよいし、演算部212が画像の分解能から計算しても良い。固有角速度ω、バネ定数k、減衰定数cは、前述のS500で説明したとおりである。
【0073】
S601および602では、加速度検出部211が、筐体103の加速度を検出し、予め計算した上限値a1maxと検出した加速度を比較する。検出した加速度が上限値より小さければ、S603に進む。検出した加速度が上限値以上になれば、S604に進む。
【0074】
S603では、画像制御部210が、画像取得装置114による撮影をする。
S604では、加速度検出部211が、加速度超過のエラーをログファイル213に記録する。
【0075】
S605では、加速度検出部211が、所定の整定時間の経過を待った後、S601に戻り、再度筐体の加速度を検出する。ここで整定時間とは、例えば、筐体103の固有周波数fから求めた周期の定数倍に設定してもよいし、タイマー等で任意の時間に設定してもよい。なお、所定の整定時間の経過を待たずに、検査を中止してもよい。
【0076】
以上の通り、本実施形態では、式(19)にステージ112の変位と光学検出器105の変位との差(x3−x2)、固有角速度ω、バネ定数k、減衰定数cを代入し、筐体103の加速度の上限値a1maxを計算する。そして、筐体に設置した加速度センサが上限値a1max以上を検出した場合は、加速度が上限値a1maxを下回るまで画像取得装置114の撮影を停止する。また、撮影中に筐体103の加速度が上限値を超える場合には、加速度超過のエラーをログファイル213に記録する。
【0077】
これにより、装置に人がぶつかったり、オペレータが情報を入力したりすることによって装置に振動が発生しても、画像ずれを許容値以内に抑えることが可能となる。また、ログファイルを参照すれば、撮影した画像と、加速度超過との因果関係を確認することができる。
【0078】
したがって、剛性が不明の作業台に設置されたDNAシーケンサーの性能を維持することができる。また、画像の取得に失敗する回数が低減されるので、高価な試薬と検査時間を費やさなくてすむ。
【0079】
<第3の実施形態>
画像の撮影中でも、分注ロボット109の分注作業、ステージ移動等によって振動が発生している。各機構からの振動は、筐体103を介して、光学検出部105(画像取得装置114)およびステージ112に伝わる。したがって、画像取得装置114とステージ112の間に相対的な位置ずれが発生し、これによって画像取得装置114が撮影する画像にずれが発生する。
【0080】
ここでは、式(8)を用いて、筐体103の加速度a1(t)と画像ずれの関係式を求める。この関係式に画像ずれの許容値を代入し、筐体103の加速度の上限値a1maxを計算する。よって、撮影中、筐体103に設置した加速度センサ207が上限値a1max以上を検出した場合は、加速度が上限値a1maxを下回るまで画像取得装置114の撮影を停止する。これにより、画像ずれは許容値を満足する。以下、筐体103の加速度a1(t)と画像ずれの関係式(19)を導出する。
【0081】
図7は、筐体の加速度を検出することで画像ずれを抑制するフローチャートである。ここでは、S705の処理のみが、図6のS605と異なる。
【0082】
S705では、ステージ制御部209または分注ロボット制御部208が、振動源となるステージ移動装置または分注ロボット移動装置等の駆動力が小さくなるように制御する。ステージ移動装置の制御は、例えば、(パルス信号で制御された)パルスモータの回転角変位をボールネジにより直線変位に変換して駆動位置決めを行う方法が挙げられる。分注ロボットの制御は、例えば、パルスモータの回転角変位をタイミングベルトにより直線変位に変換して駆動位置決めする方法が挙げられる。
【0083】
以上の通り、本実施形態では、式(19)にステージ112の変位と光学検出器105の変位との差(x3−x2)、固有角速度ω、バネ定数k、減衰定数cを代入し、筐体103の加速度の上限値a1maxを計算する。そして、筐体103の加速度が上限値a1max以上とならないように、振動源となるステージ移動装置または分注ロボット移動装置の駆動力を制御する。また、撮影中に筐体103の加速度が上限値を超える場合には、加速度超過のエラーをログファイルに記録する。
【0084】
これにより、分注ロボット109による分注作業を行いながら、画像を撮影しても、蛍光の位置ずれを許容値以内に抑えることが可能となる。また、ステージ移動を行った後、装置が完全に停止するまで待たなくても、迅速に画像を撮影することができ、蛍光の位置ずれを許容値以内に抑えることが可能となる。また、ログファイル213を参照すれば、撮影した画像と、加速度超過との因果関係を確認することができる。
【0085】
したがって、剛性が不明の作業台に設置されたDNAシーケンサーの性能を維持することができる。また、画像の取得に失敗する回数が低減されるので、高価な試薬と検査時間を費やさなくてすむ。
【符号の説明】
【0086】
103・・・筐体
105・・・光学検出部
106・・・試薬ラック
109・・・分注ロボット
110・・・廃液タンク
112・・・ステージ
114・・・画像取得部
201・・・作業台
202・・・キャスター
203・・・制御手段
204・・・表示装置
205・・・ポインティングデバイス
206・・・記憶装置
207・・・加速度センサ
208・・・分注ロボット制御部
209・・・ステージ制御部
210・・・画像制御部
211・・・加速度検出部
212・・・演算部
213・・・ログファイル
214・・・関係式
【特許請求の範囲】
【請求項1】
筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置であって、
作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記分注ロボットに要する駆動力または前記ステージ移動に要する駆動力のうち少なくとも一方の上限値を計算する演算部と、
前記分注ロボットに要する駆動力が前記上限値を上回る場合、前記分注ロボットに要する駆動力を抑制する分注ロボット制御部、または
前記ステージ移動に要する駆動力が前記上限値を上回る場合、前記ステージの移動に要する駆動力を抑制するステージ制御部のうち少なくとも一方と、
を備えることを特徴とする遺伝子配列解析装置。
【請求項2】
さらに、前記筐体の加速度を検出する加速度検出部を備え、
前記関係式は、前記分注ロボットに要する駆動力または前記ステージ移動に要する駆動力と、前記画像取得装置の変位と前記ステージの変位の差分値との関係式であり、
前記加速度検出部は、前記分注ロボットまたはステージ移動の少なくとも一方によって筐体に生じる加速度を検出し、
前記演算部は、前記検出した加速度から計算した固有角速度、ならびに前記作業台と床との間および前記筐体内の各機構間のバネ定数および減衰定数を前記関係式に代入することで、前記上限値を計算することを特徴とする請求項1記載の遺伝子配列解析装置。
【請求項3】
前記分注ロボット制御部またはステージ制御部の少なくとも一方は、前記駆動力が前記上限値を上回る場合は、駆動力超過のエラーをログファイルに記録することを特徴とする請求項1記載の遺伝子配列解析装置。
【請求項4】
筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置であって、
作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記筐体の加速度の上限値を計算する演算部と、
前記筐体の加速度を検出し、前記検出した加速度が前記上限値を上回る場合、所定の整定時間の経過を待つ加速度検出部と、
を備えることを特徴とする遺伝子配列解析装置。
【請求項5】
筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置であって、
作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記筐体の加速度の上限値を計算する演算部と、
前記筐体の加速度を検出する加速度検出部と、
前記加速度が前記上限値を上回る場合、前記分注ロボットに要する駆動力を抑制する分注ロボット制御部、または
前記加速度が前記上限値を上回る場合、前記ステージの移動に要する駆動力を抑制するステージ制御部のうち少なくとも一方と、
を備えることを特徴とする遺伝子配列解析装置。
【請求項6】
前記関係式は、前記加速度と、前記画像取得装置の変位と前記ステージの変位の差分値との関係式であり、
前記加速度検出部は、前記筐体に生じる加速度を検出し、
前記演算部は、前記検出した加速度から計算した固有角速度、ならびに前記作業台と床との間および前記筐体内の各機構間のバネ定数および減衰定数を前記関係式に代入することで、前記上限値を計算することを特徴とする請求項4または5記載の遺伝子配列解析装置。
【請求項7】
前記加速度検出部は、前記加速度が前記上限値を上回る場合は、加速度超過のエラーをログファイルに記録することを特徴とする請求項4または5記載の遺伝子配列解析装置。
【請求項8】
筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析方法であって、
演算部が、作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記分注ロボットに要する駆動力または前記ステージ移動に要する駆動力のうち少なくとも一方の上限値を計算するステップと、
分注ロボット制御部が、前記分注ロボットに要する駆動力が前記上限値を上回る場合、前記分注ロボットに要する駆動力を抑制するステップ、または
ステージ制御部が、前記ステージ移動に要する駆動力が前記上限値を上回る場合、前記ステージの移動に要する駆動力を抑制するステップのうち少なくとも一方のステップと、
を備えることを特徴とする遺伝子配列解析方法。
【請求項9】
筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析方法であって、
演算部が、作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記筐体の加速度の上限値を計算するステップと、
加速度検出部が、前記筐体の加速度を検出し、前記検出した加速度が前記上限値を上回る場合、所定の整定時間の経過を待つステップと、
を備えることを特徴とする遺伝子配列解析方法。
【請求項10】
筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する際に画像取得装置とを備える遺伝子配列解析方法であって、
演算部が、作業台に載置された状態で、前記画像取得装置が撮影する画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記筐体の加速度の上限値を計算するステップと、
加速度検出部が、前記筐体の加速度を検出するステップと、
分注ロボット制御部が、前記加速度が前記上限値を上回る場合、前記分注ロボットに要する駆動力を抑制するステップ、または
ステージ制御部が、前記加速度が前記上限値を上回る場合、前記ステージの移動に要する駆動力を抑制するステップのうち少なくとも一方のステップと、
を備えることを特徴とする遺伝子配列解析方法。
【請求項1】
筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置であって、
作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記分注ロボットに要する駆動力または前記ステージ移動に要する駆動力のうち少なくとも一方の上限値を計算する演算部と、
前記分注ロボットに要する駆動力が前記上限値を上回る場合、前記分注ロボットに要する駆動力を抑制する分注ロボット制御部、または
前記ステージ移動に要する駆動力が前記上限値を上回る場合、前記ステージの移動に要する駆動力を抑制するステージ制御部のうち少なくとも一方と、
を備えることを特徴とする遺伝子配列解析装置。
【請求項2】
さらに、前記筐体の加速度を検出する加速度検出部を備え、
前記関係式は、前記分注ロボットに要する駆動力または前記ステージ移動に要する駆動力と、前記画像取得装置の変位と前記ステージの変位の差分値との関係式であり、
前記加速度検出部は、前記分注ロボットまたはステージ移動の少なくとも一方によって筐体に生じる加速度を検出し、
前記演算部は、前記検出した加速度から計算した固有角速度、ならびに前記作業台と床との間および前記筐体内の各機構間のバネ定数および減衰定数を前記関係式に代入することで、前記上限値を計算することを特徴とする請求項1記載の遺伝子配列解析装置。
【請求項3】
前記分注ロボット制御部またはステージ制御部の少なくとも一方は、前記駆動力が前記上限値を上回る場合は、駆動力超過のエラーをログファイルに記録することを特徴とする請求項1記載の遺伝子配列解析装置。
【請求項4】
筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置であって、
作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記筐体の加速度の上限値を計算する演算部と、
前記筐体の加速度を検出し、前記検出した加速度が前記上限値を上回る場合、所定の整定時間の経過を待つ加速度検出部と、
を備えることを特徴とする遺伝子配列解析装置。
【請求項5】
筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析装置であって、
作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記筐体の加速度の上限値を計算する演算部と、
前記筐体の加速度を検出する加速度検出部と、
前記加速度が前記上限値を上回る場合、前記分注ロボットに要する駆動力を抑制する分注ロボット制御部、または
前記加速度が前記上限値を上回る場合、前記ステージの移動に要する駆動力を抑制するステージ制御部のうち少なくとも一方と、
を備えることを特徴とする遺伝子配列解析装置。
【請求項6】
前記関係式は、前記加速度と、前記画像取得装置の変位と前記ステージの変位の差分値との関係式であり、
前記加速度検出部は、前記筐体に生じる加速度を検出し、
前記演算部は、前記検出した加速度から計算した固有角速度、ならびに前記作業台と床との間および前記筐体内の各機構間のバネ定数および減衰定数を前記関係式に代入することで、前記上限値を計算することを特徴とする請求項4または5記載の遺伝子配列解析装置。
【請求項7】
前記加速度検出部は、前記加速度が前記上限値を上回る場合は、加速度超過のエラーをログファイルに記録することを特徴とする請求項4または5記載の遺伝子配列解析装置。
【請求項8】
筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析方法であって、
演算部が、作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記分注ロボットに要する駆動力または前記ステージ移動に要する駆動力のうち少なくとも一方の上限値を計算するステップと、
分注ロボット制御部が、前記分注ロボットに要する駆動力が前記上限値を上回る場合、前記分注ロボットに要する駆動力を抑制するステップ、または
ステージ制御部が、前記ステージ移動に要する駆動力が前記上限値を上回る場合、前記ステージの移動に要する駆動力を抑制するステップのうち少なくとも一方のステップと、
を備えることを特徴とする遺伝子配列解析方法。
【請求項9】
筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する画像取得装置とを備える遺伝子配列解析方法であって、
演算部が、作業台に載置された状態で、前記画像取得装置が撮影する際に画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記筐体の加速度の上限値を計算するステップと、
加速度検出部が、前記筐体の加速度を検出し、前記検出した加速度が前記上限値を上回る場合、所定の整定時間の経過を待つステップと、
を備えることを特徴とする遺伝子配列解析方法。
【請求項10】
筐体内に、試料または試薬を分注する分注ロボットと、前記試料または試薬を載置し、二次元に移動するステージと、前記試料または試薬からの蛍光を撮影する際に画像取得装置とを備える遺伝子配列解析方法であって、
演算部が、作業台に載置された状態で、前記画像取得装置が撮影する画像に生じる蛍光の位置ずれを計算するための所定の関係式に基づき、前記筐体の加速度の上限値を計算するステップと、
加速度検出部が、前記筐体の加速度を検出するステップと、
分注ロボット制御部が、前記加速度が前記上限値を上回る場合、前記分注ロボットに要する駆動力を抑制するステップ、または
ステージ制御部が、前記加速度が前記上限値を上回る場合、前記ステージの移動に要する駆動力を抑制するステップのうち少なくとも一方のステップと、
を備えることを特徴とする遺伝子配列解析方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−95582(P2012−95582A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−245152(P2010−245152)
【出願日】平成22年11月1日(2010.11.1)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年11月1日(2010.11.1)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]