
部分スライド式ローラー機構
【課題】従来のローラーの転動方向の能動的もしくは受動的な運動に加えて、軸方向の連続的な受動的運動を可能としたローラー機構を提供することと、軸方向の運動を可能としたローラーを用いることで駆動運搬能力を一方向から面方向に向上したローラー応用装置を提供すること。
【解決手段】ローラーの円周側面を、ローラーの回転軸に平行な線もしくは面で分割し、各々を独立に軸に対して軸方向にスライドできるようにする。また、スライドする円筒面を定められた位置に復帰するための機構を用意する。
【解決手段】ローラーの円周側面を、ローラーの回転軸に平行な線もしくは面で分割し、各々を独立に軸に対して軸方向にスライドできるようにする。また、スライドする円筒面を定められた位置に復帰するための機構を用意する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、動力伝達、または支持に用いられるローラーの一種で、その外周部を分割して各々スライドできるようにした機構に関するものである。本発明により、ローラーの持つ転動方向の能動または受動の運動に加えて、軸方向にも、機構の設計で規定される範囲内の速度での連続的で受動的な運動が可能となり、ローラーを用いた装置の運動方向の追加に応用できるものである。
【背景技術】
【0002】
従来、ローラーおよびその軸方向の長さが円周方向の長さに比べて短い車輪状の機構は、転動方向の動力の伝達もしくは軸方向の運動の拘束に用いられてきた。
【0003】
たとえばローラーコンベアは物品の運搬に供されるが、物品を支持しつつ、ローラーの回転する方向に自由に物品を移動できる。モータを使用しなければ外力で動く受動のローラーとなり、モータを取り付ければ能動的に物品を動かすことができる。また、通常の車輪も転動する方向には自由に回転するが、軸方向の動きは摩擦によって制限される。
【0004】
また、運搬に使用する小型の台車にローラを組み込んだものがある。この台車機構は車輪を用いたものに比較して薄型であって、重量物を運搬するために用いられるが、やはり転動方向にのみ運搬することができる。
【0005】
これらの機構の方向性を持った特徴は、一方向にのみ運動させたい場合には有益であるが、転動方向と異なる方向への運動を実現したい場合は工夫を要する。
【0006】
従来、ローラーや車輪の軸方向への運動をさせるためには、外力を加えることで滑らせるか、もしくは特殊な機構を用いることで実現されてきた。たとえば物流システムでは、ローラーコンベアで運搬を行いつつ、必要に応じて経路上に板を差し出すなどして進路をそらして仕分けを行う。この場合運搬対象には横からの力がかかるほか、ローラーコンベアとの無理な摩擦運動を生じる。
【0007】
車輪においては、車両の全方向移動性を持たせるべく、種々の車輪機構が発明されている。たとえば「全方向移動車用車輪」(特許3421290)(特許文献1)は車輪の外周上に2種類の樽状のローラーを取り付け、本来の回転方向には動力を伝え、軸方向の運動はこのローラーの転動によって自由に無限に動くものとした。この車輪を複数用いることで、任意の方向に自由に動き、旋回できる移動車を構成できる。一方、同様な機構を軸方向に長さを持つローラーで実現することは不可能である。たとえば、スプラインなどでローラーを軸上でスライドできるようにした場合は、スライド可能な範囲で受動に移動させることができるが、その受動の運動はスライド幅に制限され連続的に無限に運動できるわけではない。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許3421290
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は、従来のローラーの転動方向の能動的もしくは受動的な運動に加えて、軸方向の連続的な受動的運動を可能としたローラー機構を提供することと、軸方向の運動を可能としたローラーを用いることで駆動運搬能力を一方向から面方向に向上したローラー応用装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
上記の目的を達成するために、本発明の請求項1に係わるローラー機構は、運搬対象や駆動対象となる物品や荷重を支持する面と接触する側面部分を、軸方向の線もしくは面によって分割し、回転軸を構成する部材との間で自由にスライドできるようにしたことを特徴としている。
【0011】
以下では、本ローラー機構の分割した個々の側面部分をスライダと称し、スライダをガイドしつつスライダが離脱しないように軸方向の運動を制限し、回転軸を兼ねる中央部をコアと称する。
【0012】
本発明の請求項2に係わるローラー機構は、ローラーの側面を構成する一部のスライダが欠損したものであり、全てのスライダの集合が回転体を成さない場合である。
【0013】
本ローラー機構の連続的な運動への使用のためには、スライダが機構のあらかじめ定められた位置に復帰することが必要である。本発明の請求項3に係わるローラー機構は、機構そのものにその機能を内包した場合であり、回転機構を有さない請求項1もしくは2に係わるローラー機構ではスライダの位置はローラー外部の機構によって復帰させる。
【0014】
本発明の請求項3に係わるローラー機構、および外的機構によってスライダの復帰を行う請求項1もしくは2に係わるローラー機構は以下のように動作する。まず、複数に区分されているスライダのうちで一つが、ローラー機構の接する対象、すなわち被搬送物や被駆動物や床と接触する。ローラー機構の回転にともない、対象は円周方向に主たる相対運動をする。ここで、対象に外部から作用する力や別のローラー機構の駆動によって、対象の軸方向への運動を要請された場合、スライダは対象と接したままで、コアと相対的にスライドする。このため、ローラー機構と対象は滑ることなく、ローラーの回転方向である主たる運動に加えて、軸方向の相対運動も可能となる。しかし、単一のスライダの運動には限りがあり、無限の連続的な運動は不可能である。ただし、主たる運動の速度に比較して、軸方向の運動の速度が低い場合は、スライダの運動が限界に達する前にローラーが回転し、対象と接していたスライダは対象と接触しなくなり、上記の復帰を行う。先のスライダが接触しなくなった後、請求項2に係わる欠損がなければ隣接するスライダがすぐに、欠損があれば欠損部を超えて回転した場合またはローラー機構の逆回転によって元のスライダが対象に接触する。この新たに接触するスライダは、接触する時点であらかじめ復帰してスライダの限界位置より遠ざかっており、さらなる軸方向への運動を可能とする。すなわち、スライダを順次切り換えることで軸方向への連続的な運動を可能とする。
【0015】
この回転による主たる運動と軸方向への運動の限度は、ローラー機構の設計によって決まる比による。すなわち、対象物の運動は、この比によって決定される、軸となす角度の範囲で連続的に無限に可能となる。
【0016】
本発明の請求項4に係わる駆動機構は、本発明のローラー機構の応用装置であり、複数のローラー機構で球体を摩擦駆動することで、ローラーのスライダが限界にならない範囲で球体を任意の軸を中心として回転させることを可能とする。
【0017】
本発明の請求項5に係わる搬送装置は、本発明のローラー機構の応用装置であり、従来のローラー装置は転動方向のみに対象との相対的な運動が限られていたが、本ローラー機構を用いることでそれに直交する方向に受動的な運動を可能とする。
【発明の効果】
【0018】
本発明のローラー機構は、従来のローラー機構の転動方向の運動に加えて、軸方向の運動を可能とする利点がある。
【0019】
本発明のローラー機構に能動的な駆動装置、たとえばモータをとりつけ、方向の異なる複数のローラー機構を配置することで1方向だけではなくそれに直交する方向にも能動的に搬送することが可能となる。したがって、ローラーコンベア装置においては、外力で無理に滑らせることなく被搬送物の進行方向を制御できる。これはたとえば仕分け装置を構成することができ、または被搬送物のライン上での左右方向の位置を調整することも可能である。従来のローラーを複数用いることでもローラーと対象の接点で滑らせることを前提にすれば可能であるが、滑らせた場合は対象の運動が予測しづらいものとなることに対して、本ローラー機構は滑りなく運動させることが可能であるため、制御性は向上するという利点がある。
【0020】
本発明のローラー機構を並行または異なる方向に複数配置した装置によって、スライダが限界にならない範囲で任意の方向に対象と相対運動させることができる。したがって、ローラーコンベアとして用いた場合は無理なすべりを生じずに外力で物品を主たる進行方向に対して横方向に移動させることができる。また、ローラーを用いた重量物運搬台車に適用すれば、従来の転動による搭載物の運搬方向に加えて横方向の運搬も可能となり、重量物の据え付けなどの作業性を向上させることが可能となる利点がある。
【0021】
本発明のローラー機構を用いた球体駆動装置は、従来提案されている全方向駆動装置を用いた球体駆動装置に比べて機械的構造を簡単にできるという利点がある。また、単なるローラーを用いた球体駆動装置に対しては回転の自由度を向上できる利点がある。
【図面の簡単な説明】
【0022】
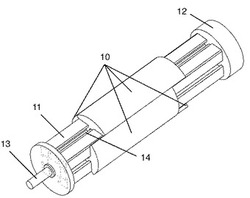
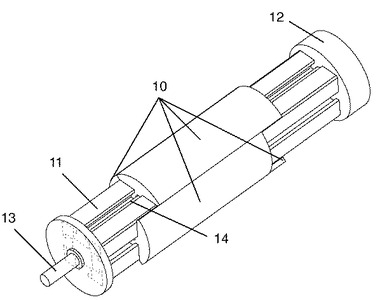
【図1】本発明のローラー機構を説明するための一実施例を示す機構概略図で、円筒面を4分割し、端部に支持するための軸と駆動するためのモータ接続用のカプラを装備した場合である。(実施例1)
【図2】本発明のローラー機構の動作を説明するための概念図で、円筒面を2分割したローラーが転動しつつ、そのシャフトが軸方向に相対的に移動していく場合である。(実施例1)
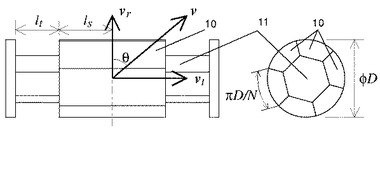
【図3】本発明のローラー機構の設計寸法と運動の限定範囲を説明するための概略図である。(実施例1)
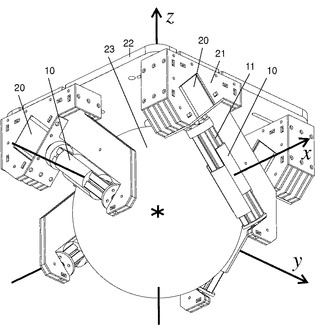
【図4】本発明のローラー機構を用いた球体駆動装置の一実施例を示す機構概略図で、4本のローラー機構を配置した場合である。(実施例2)
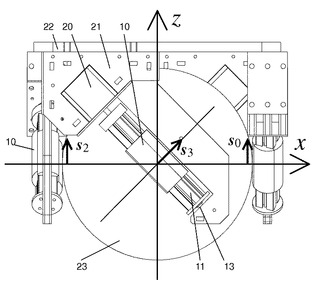
【図5】図4に示す機構を側面から示した機構概略図である。(実施例2)
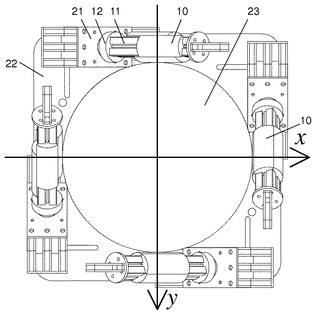
【図6】図4に示す機構を下面から示した機構概略図である。(実施例2)
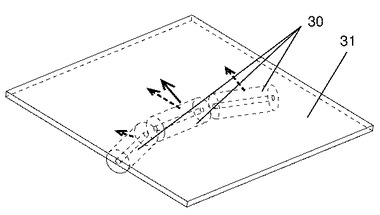
【図7】本発明のローラー機構を用いた搬送装置の一実施例を示す概略図で、3本のローラー機構によって板状の物体を搬送する場合である。
【発明を実施するための形態】
【0023】
以下、本発明のローラー機構の実施例について、図面を参照して詳細に説明する。
【実施例1】
【0024】
図1は、本発明のローラー機構を説明するための一実施例を示す機構概略図である。ローラー機構は溝を4面に有する正方形断面の角柱であるコアと、その溝の形状にかみ合う突起と中心角90度の円筒側面を有するスライダ4個からなる。また、コアの両端にはスライダが外れて分解しないための端部が存在し、一方は機構を支持するための支持軸、もう一方は能動的に駆動するためのモータ軸を接続するカプラを兼ねる。
【0025】
この図では円筒を構成する全てのスライダがあるが、一部が欠損していてもかまわない。ただし、欠損部では対象を支持することができないため、他のローラー機構などでその期間は支持する必要がある。また、この図では外周が等間隔に分割されているが、不等間隔でもかまわない。たとえば、中心角90度と270度に分割し、90度の円筒面を欠損させたような構成も可能である。
【0026】
また、コアの溝内にはスライダを中心部分に復帰させるためのバネが、ガイドとともにスライダの両スライド方向に挿入されている。このバネはスライダに接触する対象との間に滑りを起こさない程度には十分に弱いバネである。このバネにより、対象物と接触しないスライダはコアの軸方向の中央部に復帰する。
【0027】
スライダ位置を復帰させるには、たとえばバネや空気圧や磁力を用いた力を用いる。また、復帰させるべき位置は本発明のローラー機構の用途によって、コアの軸方向の中央部に限定されない。また、復帰位置をあらかじめ定めず、用途の運動に応じて復帰位置を調整して運動範囲を広げることができる。ローラー機構そのものに復帰機能を内包しない場合は、外部の機構によって復帰させる必要がある。
【0028】
スライダをコアに対してスライドさせる機構は、図1に示す実施例ではたとえば潤滑した擦動面であるが、たとえばボールまたは細いローラーを多数用いた直動ベアリング機構によっても構成できる。直動ベアリング機構を用いると動きがなめらかになり、大きな荷重に耐えられるが、復帰時にバネと振動を起こしうるために、復帰のためには、たとえばダンパーなどの制動する部品も必要となりうる。
【0029】
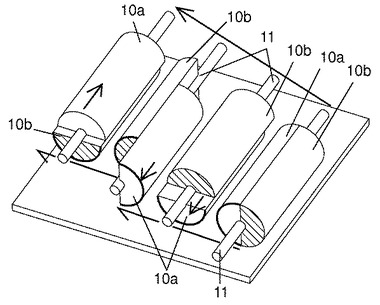
図2は、本発明の実施例の動作に関する概念図であり、同一のローラー機構が右から左に転動して、下部で接触している板と相対運動をする様子を示している。ここではコアは単なる軸、スライダは半円筒として書かれており、端面が白のスライダ1と端面がハッチングしてあるスライダ2が区別してある。まず、最初にスライダ1が接触しつつ左に転がり、三つ目の図でスライダ2に接触が切り替わる。接触しているスライダの端面の円周は太い線で示した。この転動と同時に、軸とスライダが軸方向に相対運動をする。軸は図の奥方向に移動していくのに対して、板と接しているスライダ1は軸に対して手前に相対運動する。この軸方向の相対運動は、軸の長さが有限であるため限度があるが、三つ目の図で軸中央に位置するスライダ2に接触が切り替わり、スライダ1は解放され、軸中央位置に復帰する。この動作の繰り返しにより、本ローラー機構は転動しつつ連続的に軸方向への移動が可能である。
【0030】
図3は、本発明の実施例の設計に関する概念図であり、lsはスライダの長さの半分を、ltはスライダの可動範囲の長さを示す。スライダにより構成される円筒面の直径をDとし、外周をN等分するとする。またvはローラーと対象の相対的な運動を表すベクトルで、vrは分解された円周方向の速度、vtはスライドする速度を表す。ここで、本機構と接触する対象物との相対的な運動の方向をθとすると、機構の制限として、数1式の関係がある。移動させるべき方向θが決まっていれば、数1式によってスライドする必要のある長さの最低値が得られる。またその移動に際して、中央部での接触を維持する必要がある場合は数2式によってスライダの長さも確保する必要がある。ただし、この制限は連続して一定方向へ移動させる場合に係わるものであって、スライダの切り替えに十分な振幅で往復転動させれば、実質的にこの角度制限なく連続して軸方向に移動させることができる。
【0031】
【数1】

【数2】
【実施例2】
【0032】
図4、図5および図6は本ローラー機構を球体の駆動装置に適用した実施例であり、四つのローラー機構からなる。図4は全体の概略図、図5は側面図、図6は下面図である。ローラーの回転軸は水平、垂直ではなく、斜め方向に設定されているが、鉛直面内には存在し、球に接している。各々の駆動方向を図5にsで示した。各々のローラー機構の球に対する接点の位置および求める球の回転角速度から得られる接点での球面の速度と、駆動方向を示す単位ベクトルsの内積によって、各ローラー機構の回転させるべき速度は一意に求まる。
【実施例3】
【0033】
図7は3本の本発明のローラー機構による板状物体の搬送の概念図である。ただし、物体を支持するための他のローラーやキャスタ機構は略してある。能動的な搬送に使用する場合は、この図に示すように異なる方向に軸を向ける。ローラーを駆動すべき回転速度は、搬送物の移動速度、移動方向を示す単位ベクトルの内積によって一意に求めることができる。図では実線の矢印の方向に運動させたい場合の、各ローラーの能動的な回転速度比を破線の矢印で示した。これに各ローラーのスライダの運動が加わり、実線矢印の方向の運動となる。物体を搬送可能な方向は、全てのローラーの上記制限によって制限される。
【実施例4】
【0034】
小型の台車に本ローラー機構を取り付けたものは、薄型の運搬台車として使用することができる。従来のローラーを取り付けた同様の台車は主に重量物の搬送に使用されており、ローラーの転がる方向には被搬送物を容易に動かせるが、移動方向を変えるには被搬送物の重量に依存した大きな力で摩擦させるか一度被搬送物を持ち上げる必要がある。本ローラー機構を用いた台車では、転動方向に動かしていれば軸方向への移動も可能となる。スライダの切り替えが行われるのに十分な距離で小刻みに往復転動させればジグザグに軸方向に移動させることが可能である。これによって、重量物を平面上で動かすことが可能な運搬台車を構成できる。また、台車の枠を省略した本ローラー機構のみでも、軸方向にも移動させることができるコロとして機能し、物品の運搬に供することができる。
【産業上の利用可能性】
【0035】
本発明のローラー機構は、上述のようにローラーの側面を分割し、独立にスライドできるようにしたものである。これによって、従来のローラーで可能であった転動方向の相対運動に加えて、不可能であった軸方向の運動も連続的に行うことが可能となった。これにより、従来は接するものと滑らせなければ実現できなかった相対運動を滑りなく実現できる場合がまし、不確定な滑りによる駆動が、複数のローラー機構の能動的な駆動速度比によって決定づけられる確実な駆動となる。従来の発明である、全方向移動車用の各種車輪を用いても同様な駆動は可能であるが、本発明によるローラー機構は構造が簡素で安価に製造できる。また支持が断続せず連続的な支持が可能であり、かつ各種車輪は点接触での支持であるのに対してローラーとしての線での分布接触でより大きな荷重を受けることができる。したがって産業上の平面の相対運動を必要とする駆動装置に有望である。
【符号の説明】
【0036】
10 スライダ(部分円筒面)
10a スライダ1
10b スライダ2
11 コア(擦動レール兼回転軸)
12 取り付けカプラ
13 支持軸
14 スライダ復帰バネおよびガイド
20 駆動モータ
21 支持材
22 基盤
23 球
30 ローラー機構
31 被搬送物
【技術分野】
【0001】
本発明は、動力伝達、または支持に用いられるローラーの一種で、その外周部を分割して各々スライドできるようにした機構に関するものである。本発明により、ローラーの持つ転動方向の能動または受動の運動に加えて、軸方向にも、機構の設計で規定される範囲内の速度での連続的で受動的な運動が可能となり、ローラーを用いた装置の運動方向の追加に応用できるものである。
【背景技術】
【0002】
従来、ローラーおよびその軸方向の長さが円周方向の長さに比べて短い車輪状の機構は、転動方向の動力の伝達もしくは軸方向の運動の拘束に用いられてきた。
【0003】
たとえばローラーコンベアは物品の運搬に供されるが、物品を支持しつつ、ローラーの回転する方向に自由に物品を移動できる。モータを使用しなければ外力で動く受動のローラーとなり、モータを取り付ければ能動的に物品を動かすことができる。また、通常の車輪も転動する方向には自由に回転するが、軸方向の動きは摩擦によって制限される。
【0004】
また、運搬に使用する小型の台車にローラを組み込んだものがある。この台車機構は車輪を用いたものに比較して薄型であって、重量物を運搬するために用いられるが、やはり転動方向にのみ運搬することができる。
【0005】
これらの機構の方向性を持った特徴は、一方向にのみ運動させたい場合には有益であるが、転動方向と異なる方向への運動を実現したい場合は工夫を要する。
【0006】
従来、ローラーや車輪の軸方向への運動をさせるためには、外力を加えることで滑らせるか、もしくは特殊な機構を用いることで実現されてきた。たとえば物流システムでは、ローラーコンベアで運搬を行いつつ、必要に応じて経路上に板を差し出すなどして進路をそらして仕分けを行う。この場合運搬対象には横からの力がかかるほか、ローラーコンベアとの無理な摩擦運動を生じる。
【0007】
車輪においては、車両の全方向移動性を持たせるべく、種々の車輪機構が発明されている。たとえば「全方向移動車用車輪」(特許3421290)(特許文献1)は車輪の外周上に2種類の樽状のローラーを取り付け、本来の回転方向には動力を伝え、軸方向の運動はこのローラーの転動によって自由に無限に動くものとした。この車輪を複数用いることで、任意の方向に自由に動き、旋回できる移動車を構成できる。一方、同様な機構を軸方向に長さを持つローラーで実現することは不可能である。たとえば、スプラインなどでローラーを軸上でスライドできるようにした場合は、スライド可能な範囲で受動に移動させることができるが、その受動の運動はスライド幅に制限され連続的に無限に運動できるわけではない。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許3421290
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は、従来のローラーの転動方向の能動的もしくは受動的な運動に加えて、軸方向の連続的な受動的運動を可能としたローラー機構を提供することと、軸方向の運動を可能としたローラーを用いることで駆動運搬能力を一方向から面方向に向上したローラー応用装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
上記の目的を達成するために、本発明の請求項1に係わるローラー機構は、運搬対象や駆動対象となる物品や荷重を支持する面と接触する側面部分を、軸方向の線もしくは面によって分割し、回転軸を構成する部材との間で自由にスライドできるようにしたことを特徴としている。
【0011】
以下では、本ローラー機構の分割した個々の側面部分をスライダと称し、スライダをガイドしつつスライダが離脱しないように軸方向の運動を制限し、回転軸を兼ねる中央部をコアと称する。
【0012】
本発明の請求項2に係わるローラー機構は、ローラーの側面を構成する一部のスライダが欠損したものであり、全てのスライダの集合が回転体を成さない場合である。
【0013】
本ローラー機構の連続的な運動への使用のためには、スライダが機構のあらかじめ定められた位置に復帰することが必要である。本発明の請求項3に係わるローラー機構は、機構そのものにその機能を内包した場合であり、回転機構を有さない請求項1もしくは2に係わるローラー機構ではスライダの位置はローラー外部の機構によって復帰させる。
【0014】
本発明の請求項3に係わるローラー機構、および外的機構によってスライダの復帰を行う請求項1もしくは2に係わるローラー機構は以下のように動作する。まず、複数に区分されているスライダのうちで一つが、ローラー機構の接する対象、すなわち被搬送物や被駆動物や床と接触する。ローラー機構の回転にともない、対象は円周方向に主たる相対運動をする。ここで、対象に外部から作用する力や別のローラー機構の駆動によって、対象の軸方向への運動を要請された場合、スライダは対象と接したままで、コアと相対的にスライドする。このため、ローラー機構と対象は滑ることなく、ローラーの回転方向である主たる運動に加えて、軸方向の相対運動も可能となる。しかし、単一のスライダの運動には限りがあり、無限の連続的な運動は不可能である。ただし、主たる運動の速度に比較して、軸方向の運動の速度が低い場合は、スライダの運動が限界に達する前にローラーが回転し、対象と接していたスライダは対象と接触しなくなり、上記の復帰を行う。先のスライダが接触しなくなった後、請求項2に係わる欠損がなければ隣接するスライダがすぐに、欠損があれば欠損部を超えて回転した場合またはローラー機構の逆回転によって元のスライダが対象に接触する。この新たに接触するスライダは、接触する時点であらかじめ復帰してスライダの限界位置より遠ざかっており、さらなる軸方向への運動を可能とする。すなわち、スライダを順次切り換えることで軸方向への連続的な運動を可能とする。
【0015】
この回転による主たる運動と軸方向への運動の限度は、ローラー機構の設計によって決まる比による。すなわち、対象物の運動は、この比によって決定される、軸となす角度の範囲で連続的に無限に可能となる。
【0016】
本発明の請求項4に係わる駆動機構は、本発明のローラー機構の応用装置であり、複数のローラー機構で球体を摩擦駆動することで、ローラーのスライダが限界にならない範囲で球体を任意の軸を中心として回転させることを可能とする。
【0017】
本発明の請求項5に係わる搬送装置は、本発明のローラー機構の応用装置であり、従来のローラー装置は転動方向のみに対象との相対的な運動が限られていたが、本ローラー機構を用いることでそれに直交する方向に受動的な運動を可能とする。
【発明の効果】
【0018】
本発明のローラー機構は、従来のローラー機構の転動方向の運動に加えて、軸方向の運動を可能とする利点がある。
【0019】
本発明のローラー機構に能動的な駆動装置、たとえばモータをとりつけ、方向の異なる複数のローラー機構を配置することで1方向だけではなくそれに直交する方向にも能動的に搬送することが可能となる。したがって、ローラーコンベア装置においては、外力で無理に滑らせることなく被搬送物の進行方向を制御できる。これはたとえば仕分け装置を構成することができ、または被搬送物のライン上での左右方向の位置を調整することも可能である。従来のローラーを複数用いることでもローラーと対象の接点で滑らせることを前提にすれば可能であるが、滑らせた場合は対象の運動が予測しづらいものとなることに対して、本ローラー機構は滑りなく運動させることが可能であるため、制御性は向上するという利点がある。
【0020】
本発明のローラー機構を並行または異なる方向に複数配置した装置によって、スライダが限界にならない範囲で任意の方向に対象と相対運動させることができる。したがって、ローラーコンベアとして用いた場合は無理なすべりを生じずに外力で物品を主たる進行方向に対して横方向に移動させることができる。また、ローラーを用いた重量物運搬台車に適用すれば、従来の転動による搭載物の運搬方向に加えて横方向の運搬も可能となり、重量物の据え付けなどの作業性を向上させることが可能となる利点がある。
【0021】
本発明のローラー機構を用いた球体駆動装置は、従来提案されている全方向駆動装置を用いた球体駆動装置に比べて機械的構造を簡単にできるという利点がある。また、単なるローラーを用いた球体駆動装置に対しては回転の自由度を向上できる利点がある。
【図面の簡単な説明】
【0022】
【図1】本発明のローラー機構を説明するための一実施例を示す機構概略図で、円筒面を4分割し、端部に支持するための軸と駆動するためのモータ接続用のカプラを装備した場合である。(実施例1)
【図2】本発明のローラー機構の動作を説明するための概念図で、円筒面を2分割したローラーが転動しつつ、そのシャフトが軸方向に相対的に移動していく場合である。(実施例1)
【図3】本発明のローラー機構の設計寸法と運動の限定範囲を説明するための概略図である。(実施例1)
【図4】本発明のローラー機構を用いた球体駆動装置の一実施例を示す機構概略図で、4本のローラー機構を配置した場合である。(実施例2)
【図5】図4に示す機構を側面から示した機構概略図である。(実施例2)
【図6】図4に示す機構を下面から示した機構概略図である。(実施例2)
【図7】本発明のローラー機構を用いた搬送装置の一実施例を示す概略図で、3本のローラー機構によって板状の物体を搬送する場合である。
【発明を実施するための形態】
【0023】
以下、本発明のローラー機構の実施例について、図面を参照して詳細に説明する。
【実施例1】
【0024】
図1は、本発明のローラー機構を説明するための一実施例を示す機構概略図である。ローラー機構は溝を4面に有する正方形断面の角柱であるコアと、その溝の形状にかみ合う突起と中心角90度の円筒側面を有するスライダ4個からなる。また、コアの両端にはスライダが外れて分解しないための端部が存在し、一方は機構を支持するための支持軸、もう一方は能動的に駆動するためのモータ軸を接続するカプラを兼ねる。
【0025】
この図では円筒を構成する全てのスライダがあるが、一部が欠損していてもかまわない。ただし、欠損部では対象を支持することができないため、他のローラー機構などでその期間は支持する必要がある。また、この図では外周が等間隔に分割されているが、不等間隔でもかまわない。たとえば、中心角90度と270度に分割し、90度の円筒面を欠損させたような構成も可能である。
【0026】
また、コアの溝内にはスライダを中心部分に復帰させるためのバネが、ガイドとともにスライダの両スライド方向に挿入されている。このバネはスライダに接触する対象との間に滑りを起こさない程度には十分に弱いバネである。このバネにより、対象物と接触しないスライダはコアの軸方向の中央部に復帰する。
【0027】
スライダ位置を復帰させるには、たとえばバネや空気圧や磁力を用いた力を用いる。また、復帰させるべき位置は本発明のローラー機構の用途によって、コアの軸方向の中央部に限定されない。また、復帰位置をあらかじめ定めず、用途の運動に応じて復帰位置を調整して運動範囲を広げることができる。ローラー機構そのものに復帰機能を内包しない場合は、外部の機構によって復帰させる必要がある。
【0028】
スライダをコアに対してスライドさせる機構は、図1に示す実施例ではたとえば潤滑した擦動面であるが、たとえばボールまたは細いローラーを多数用いた直動ベアリング機構によっても構成できる。直動ベアリング機構を用いると動きがなめらかになり、大きな荷重に耐えられるが、復帰時にバネと振動を起こしうるために、復帰のためには、たとえばダンパーなどの制動する部品も必要となりうる。
【0029】
図2は、本発明の実施例の動作に関する概念図であり、同一のローラー機構が右から左に転動して、下部で接触している板と相対運動をする様子を示している。ここではコアは単なる軸、スライダは半円筒として書かれており、端面が白のスライダ1と端面がハッチングしてあるスライダ2が区別してある。まず、最初にスライダ1が接触しつつ左に転がり、三つ目の図でスライダ2に接触が切り替わる。接触しているスライダの端面の円周は太い線で示した。この転動と同時に、軸とスライダが軸方向に相対運動をする。軸は図の奥方向に移動していくのに対して、板と接しているスライダ1は軸に対して手前に相対運動する。この軸方向の相対運動は、軸の長さが有限であるため限度があるが、三つ目の図で軸中央に位置するスライダ2に接触が切り替わり、スライダ1は解放され、軸中央位置に復帰する。この動作の繰り返しにより、本ローラー機構は転動しつつ連続的に軸方向への移動が可能である。
【0030】
図3は、本発明の実施例の設計に関する概念図であり、lsはスライダの長さの半分を、ltはスライダの可動範囲の長さを示す。スライダにより構成される円筒面の直径をDとし、外周をN等分するとする。またvはローラーと対象の相対的な運動を表すベクトルで、vrは分解された円周方向の速度、vtはスライドする速度を表す。ここで、本機構と接触する対象物との相対的な運動の方向をθとすると、機構の制限として、数1式の関係がある。移動させるべき方向θが決まっていれば、数1式によってスライドする必要のある長さの最低値が得られる。またその移動に際して、中央部での接触を維持する必要がある場合は数2式によってスライダの長さも確保する必要がある。ただし、この制限は連続して一定方向へ移動させる場合に係わるものであって、スライダの切り替えに十分な振幅で往復転動させれば、実質的にこの角度制限なく連続して軸方向に移動させることができる。
【0031】
【数1】
【数2】
【実施例2】
【0032】
図4、図5および図6は本ローラー機構を球体の駆動装置に適用した実施例であり、四つのローラー機構からなる。図4は全体の概略図、図5は側面図、図6は下面図である。ローラーの回転軸は水平、垂直ではなく、斜め方向に設定されているが、鉛直面内には存在し、球に接している。各々の駆動方向を図5にsで示した。各々のローラー機構の球に対する接点の位置および求める球の回転角速度から得られる接点での球面の速度と、駆動方向を示す単位ベクトルsの内積によって、各ローラー機構の回転させるべき速度は一意に求まる。
【実施例3】
【0033】
図7は3本の本発明のローラー機構による板状物体の搬送の概念図である。ただし、物体を支持するための他のローラーやキャスタ機構は略してある。能動的な搬送に使用する場合は、この図に示すように異なる方向に軸を向ける。ローラーを駆動すべき回転速度は、搬送物の移動速度、移動方向を示す単位ベクトルの内積によって一意に求めることができる。図では実線の矢印の方向に運動させたい場合の、各ローラーの能動的な回転速度比を破線の矢印で示した。これに各ローラーのスライダの運動が加わり、実線矢印の方向の運動となる。物体を搬送可能な方向は、全てのローラーの上記制限によって制限される。
【実施例4】
【0034】
小型の台車に本ローラー機構を取り付けたものは、薄型の運搬台車として使用することができる。従来のローラーを取り付けた同様の台車は主に重量物の搬送に使用されており、ローラーの転がる方向には被搬送物を容易に動かせるが、移動方向を変えるには被搬送物の重量に依存した大きな力で摩擦させるか一度被搬送物を持ち上げる必要がある。本ローラー機構を用いた台車では、転動方向に動かしていれば軸方向への移動も可能となる。スライダの切り替えが行われるのに十分な距離で小刻みに往復転動させればジグザグに軸方向に移動させることが可能である。これによって、重量物を平面上で動かすことが可能な運搬台車を構成できる。また、台車の枠を省略した本ローラー機構のみでも、軸方向にも移動させることができるコロとして機能し、物品の運搬に供することができる。
【産業上の利用可能性】
【0035】
本発明のローラー機構は、上述のようにローラーの側面を分割し、独立にスライドできるようにしたものである。これによって、従来のローラーで可能であった転動方向の相対運動に加えて、不可能であった軸方向の運動も連続的に行うことが可能となった。これにより、従来は接するものと滑らせなければ実現できなかった相対運動を滑りなく実現できる場合がまし、不確定な滑りによる駆動が、複数のローラー機構の能動的な駆動速度比によって決定づけられる確実な駆動となる。従来の発明である、全方向移動車用の各種車輪を用いても同様な駆動は可能であるが、本発明によるローラー機構は構造が簡素で安価に製造できる。また支持が断続せず連続的な支持が可能であり、かつ各種車輪は点接触での支持であるのに対してローラーとしての線での分布接触でより大きな荷重を受けることができる。したがって産業上の平面の相対運動を必要とする駆動装置に有望である。
【符号の説明】
【0036】
10 スライダ(部分円筒面)
10a スライダ1
10b スライダ2
11 コア(擦動レール兼回転軸)
12 取り付けカプラ
13 支持軸
14 スライダ復帰バネおよびガイド
20 駆動モータ
21 支持材
22 基盤
23 球
30 ローラー機構
31 被搬送物
【特許請求の範囲】
【請求項1】
ローラー機構において、回転軸に平行な直線もしくは面によって二つ以上に分割され、回転軸に対して各々独立して軸方向にスライドできるようにした側面を有すること、を特徴とするローラー機構。
【請求項2】
前記分割された側面の全てではない一部が欠損している、請求項1記載のローラー機構。
【請求項3】
前記分割された側面が、外力の作用しない場合にあらかじめ定められた位置に自動復帰する機能を有する、請求項1もしくは2のいずれかに記載のローラー機構。
【請求項4】
請求項1から3のいずれかに記載のローラー機構を三つ以上用いて、球体に任意の方向の回転をさせる、駆動装置。
【請求項5】
請求項1から3のいずれかに記載のローラー機構を用いて、面上で主たる一方向に加えて直交するもう一方向の連続的な運動を可能とする、搬送装置。
【請求項1】
ローラー機構において、回転軸に平行な直線もしくは面によって二つ以上に分割され、回転軸に対して各々独立して軸方向にスライドできるようにした側面を有すること、を特徴とするローラー機構。
【請求項2】
前記分割された側面の全てではない一部が欠損している、請求項1記載のローラー機構。
【請求項3】
前記分割された側面が、外力の作用しない場合にあらかじめ定められた位置に自動復帰する機能を有する、請求項1もしくは2のいずれかに記載のローラー機構。
【請求項4】
請求項1から3のいずれかに記載のローラー機構を三つ以上用いて、球体に任意の方向の回転をさせる、駆動装置。
【請求項5】
請求項1から3のいずれかに記載のローラー機構を用いて、面上で主たる一方向に加えて直交するもう一方向の連続的な運動を可能とする、搬送装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−82068(P2012−82068A)
【公開日】平成24年4月26日(2012.4.26)
【国際特許分類】
【出願番号】特願2010−232093(P2010−232093)
【出願日】平成22年10月15日(2010.10.15)
【出願人】(709002004)学校法人東北学院 (10)
【Fターム(参考)】
【公開日】平成24年4月26日(2012.4.26)
【国際特許分類】
【出願日】平成22年10月15日(2010.10.15)
【出願人】(709002004)学校法人東北学院 (10)
【Fターム(参考)】
[ Back to top ]