
部材ハンドリング装置
【課題】平置きされた種々の形状をなす部材を倒立させ次の工程へと円滑に受け渡しすることのできる部材ハンドリング装置を提供すること。
【解決手段】倒立用ロボットの第2アーム先端に、一平面に複数の電磁石36の配設されたマグネットハンド30を設ける。形状の異なる複数の部材のうち最も幅狭な部材よりも小幅な吸着面に形成された電磁石が一平面に複数配設されており、前記部材の形状または重量に応じて選択的に該複数の電磁石のうちの一部または全てを使用して該部材を吸着する。
【解決手段】倒立用ロボットの第2アーム先端に、一平面に複数の電磁石36の配設されたマグネットハンド30を設ける。形状の異なる複数の部材のうち最も幅狭な部材よりも小幅な吸着面に形成された電磁石が一平面に複数配設されており、前記部材の形状または重量に応じて選択的に該複数の電磁石のうちの一部または全てを使用して該部材を吸着する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、部材の取り回しを行う部材ハンドリング装置に関する。
【背景技術】
【0002】
造船等においては、鋼材から切断された板材を配送し仮溶接するサブユニット組立ラインを経てブロックが製作される。
つまり、当該サブユニット組立ラインでは、ブロックを形成するためのサブユニットが製作される。
当該サブユニット組立ラインの構成としては、例えば、溶接ラインに沿って走行する門型台車に、旋回アームを有し溶接ラインと直交する方向に移動する横行台車を設けて、旋回アームの先端部の把持装置により板材等の骨材を把持して溶接位置に配送する構成がある(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第2564064号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に開示された技術では、レールの外側に配置された骨材パレット上にある骨材を把持装置により把持して持ち上げて所定位置に配送しているが、当該把持装置では、パレット上に平置きされるような板材を把持することは困難である。
鋼材から切断された板材は様々な形状をなしている上、通常はパレット上に平置きされて当該サブユニット組立ラインに運ばれてくる。このような板材を溶接位置まで円滑に配送するには、パレット上に平置きされた板材を、配送手段に円滑に受け渡す手段が必要となる。
【0005】
本発明はこのような問題を解決するためになされたもので、その目的とするところは、平置きされた種々の形状をなす部材を倒立させ次の工程へと円滑に受け渡しすることのできる部材ハンドリング装置を提供することにある。
【課題を解決するための手段】
【0006】
上記した目的を達成するために、請求項1の部材ハンドリング装置では、形状の異なる複数の部材を取り回し可能な部材ハンドリング装置であって、可動自在な腕部と、該腕部の先端に設けられ、前記形状の異なる複数の部材のうち最も幅狭な部材よりも小幅な吸着面に形成された電磁石が一平面に複数配設されており、前記部材の形状または重量に応じて選択的に該複数の電磁石のうちの一部または全てを使用して該部材を吸着するマグネットハンド部とを備えることを特徴としている。
【0007】
請求項2の部材ハンドリング装置では、請求項1において、前記マグネットハンド部は、前記一平面にて長辺及び短辺からなる矩形状の縁部に沿って前記電磁石が配設されていることを特徴としている。
請求項3の部材ハンドリング装置では、請求項2において、前記マグネットハンド部は、前記矩形状の中心部にも前記電磁石が配設されていることを特徴としている。
【0008】
請求項4の部材ハンドリング装置では、請求項1乃至3のいずれかにおいて、前記マグネットハンド部は、平置きされた前記部材を吸着し、該部材を所定の倒立置場に倒立させた状態で配設することを特徴としている。
【発明の効果】
【0009】
上記手段を用いる本発明の請求項1の部材ハンドリング装置によれば、形状の異なる複数の部材を取り回し可能な部材ハンドリング装置において、可動自在な腕部の先端に、形状の異なる複数の部材のうち最も幅狭な部材よりも小幅な吸着面からなる電磁石が一平面に複数配設され、部材の形状に応じて選択的に当該複数の電磁石のうちの一部または全て使用して部材を吸着するマグネットハンド部を設ける。
【0010】
つまり、形状の異なる複数の部材のうち最も幅狭な部材よりも小幅な吸着面に形成された複数の電磁石を部材の形状に応じて選択的に使用することで、どの部材でも少なくとも1つの電磁石の吸着面を部材の一面からはみ出ることなく確実に吸着させることができる。
これにより、1つのマグネットハンド部により、小さな部材から大きな部材までを確実に吸着し、次の工程への受け渡しを円滑に行うことができる。
【0011】
請求項2の部材ハンドリング装置によれば、マグネットハンド部は、一平面上にて長辺及び短辺からなる矩形状の縁部に沿って電磁石が配設されている。
つまり、例えば細長い板材である場合には長辺に沿って配設された電磁石で吸着し、短い板材である場合には短辺に沿った電磁石で吸着する等、部材の形状に合わせて確実に吸着することができる。
【0012】
このように部材の形状に合わせた位置で吸着することができることで、次の工程での部材の受け渡しを容易なものとすることができる。
請求項3の部材ハンドリング装置によれば、マグネットハンド部は、矩形状の中心部にも電磁石が配設されている。
これにより、例えば面積の大きな部材の場合でも、当該部材の重心位置を確実に吸着しつつ、矩形状の縁部にある電磁石でも吸着することで、当該部材を確実に吸着することができる。
【0013】
請求項4の部材ハンドリング装置によれば、前記マグネットハンド部は、平置きされた前記部材を吸着し、腕部の可動とともに、当該部材を所定の倒立置場に倒立させた状態で配設する。
このように、平置きされた部材を所定の倒立置場に倒立させた状態で配設することで、次の工程における当該部材のピッキングが容易となり、部材を円滑に受け渡すことができる。
【図面の簡単な説明】
【0014】
【図1】本発明に係る部材ハンドリング装置を備えたサブユニット組立装置の平面図である。
【図2】本発明に係る部材ハンドリング装置を備えたサブユニット組立装置の正面図である。
【図3】本発明に係る部材ハンドリング装置を備えたサブユニット組立装置の側面図である。
【図4】マグネットハンドの斜視図である。
【図5】マグネットハンドの斜視図である。
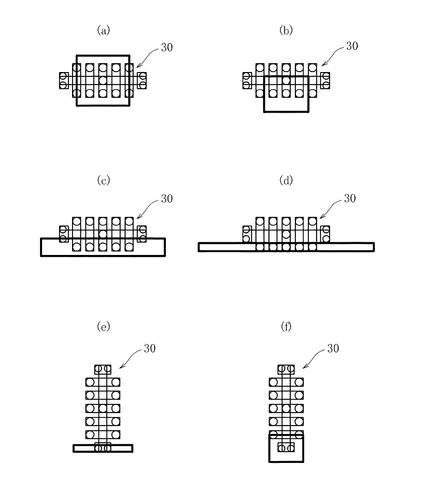
【図6】倒立用ロボットの板材倒立作業工程図である。
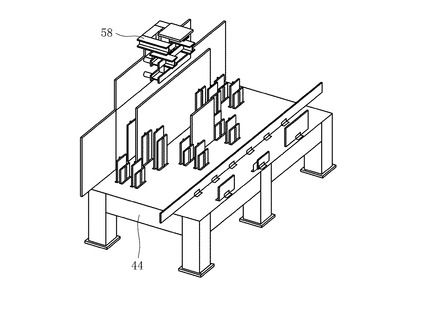
【図7】倒立用ロボットのマグネットハンドによる板材配設時の斜視図である。
【図8】配送機構のクランプハンドによる板材把持時の斜視図である。
【図9】本発明に係る部材ハンドリング装置において各板材の形状に応じたマジックハンドの吸着位置を例示した図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態を図面に基づき説明する。
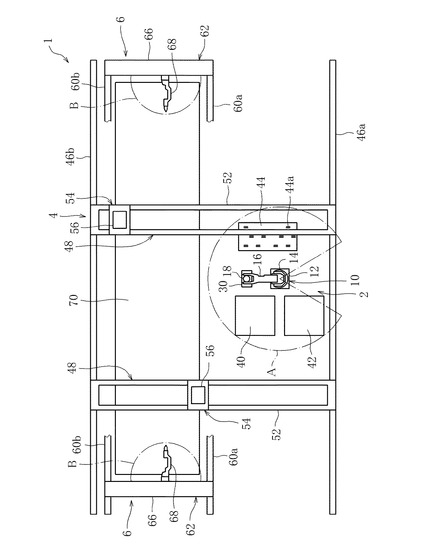
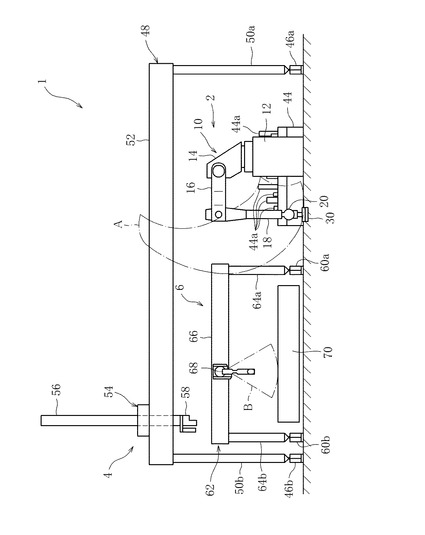
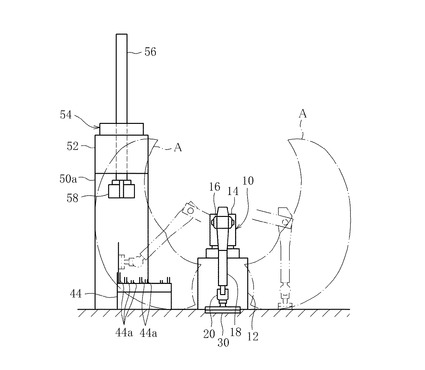
図1乃至3には本発明に係る部材ハンドリング装置を備えたサブユニット組立装置の平面図、正面図、側面図、図4、5にはマグネットハンドの斜視図がそれぞれ示されている。
図1乃至3には、造船ラインの一部に設けられたサブユニット組立装置1が示されている。
【0016】
本実施形態におけるサブユニット組立装置1は、主に、平置きされた板材を倒立させる板材倒立部2、倒立された板材を配送する配送部4、配送された板材に仮溶接を施す溶接部6から構成されている。
板材倒立部2は、倒立用ロボット10(部材ハンドリング装置)を有している。
当該倒立用ロボット10は、所謂6軸多関節ロボットである。詳しくは、当該倒立用ロボット10は、基台12に回転台14が載置され、当該回転台14に第1アーム16の一端が連結されている。そして、当該第1アーム16の他端には第2アーム18(腕部)が連結されており、当該第2アーム18の先端部分には回転連結部20を介してマグネットハンド30(マグネットハンド部)が設けられている。
【0017】
当該倒立用ロボット10は、図1乃至3に一点鎖線で示す領域Aの範囲でハンドリング可能である。
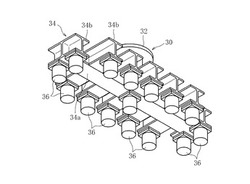
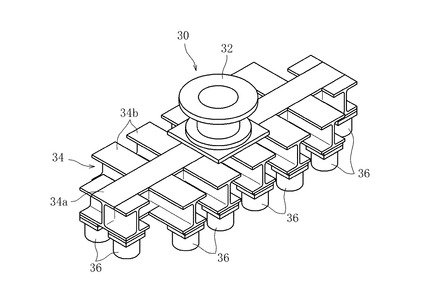
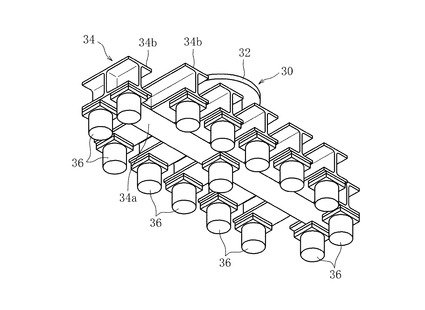
また、マグネットハンド30は、詳しくは図4、5に示すように、回転連結部20と支軸32を介して連結された本体部34の一側面に複数個の電磁石36が配設されている。
本体部34は、断面I字状の主桁34aが支軸32の軸方向と垂直をなす一方向に延びているとともに、当該主桁34aを垂直に貫通する複数の補助桁34bが当該主桁34aの一端から他端にかけて所定の間隔で並設されている。
【0018】
電磁石36は、主桁34aの中央部、及び各補助桁34bの両端部にそれぞれ設けられている。これは、平面視において、主桁34a両端部の補助桁34bに設けられた電磁石36を短辺、その他の補助桁34bに設けられた電磁石36を長辺とする略矩形状に配設されている。また、当該矩形状の中心部に主桁34a中央部に設けられた電磁石36が位置している。
【0019】
当該電磁石36は円筒状をなしており、端面である吸着面は、板材倒立部2に搬送される形状の異なる複数の部材のうち最も幅狭な部材よりも小幅に形成されている。
例えば、板材倒立部2に搬送される板材の中で最も幅狭な板材が幅100mmの長板材である場合は、電磁石36の吸着面の直径は当該長板材の幅より小径な90mmを使用する。
【0020】
このように構成されたマグネットハンド30は、板材の形状及び重量に応じて選択的に複数の電磁石36のうちの一部または全てに電力を供給されることで、板材を吸着するものである。
また、当該倒立用ロボット10の周囲には、図示しないフォークリフト等により板材の載ったパレットが配設されるパレット置場40、空になったパレットが配設される空パレット置場42、倒立状態で板材が配設される倒立板材置場44が形成されている。
【0021】
当該倒立板材置場44上には、板材を倒立状態で支持する支持部材44aが複数設けられている。当該各支持部材44aは、板材の形状に対応し、板材の下部の少なくとも2箇所に位置するよう配設されており、各箇所において当該板材を挟むように立設された一対の支持板で構成されている。なお、面積の大きな板材を支持するための支持板は上方に長く、面積の小さな板材を支持するための支持板は上方に短い形状をなしている。
【0022】
配送部4は、板材倒立部2及び溶接部6を間に挟むよう敷設された一対の第1レール46a、46b及び当該第1レール46a、46b上を走行する2機の第1門型フレーム48、48を有している。なお、当該2機の第1門型フレーム48、48はそれぞれ同様の構成をなしており、以下1機の第1門型フレーム48について説明する。
当該第1門型フレーム48は、板材倒立部2及び溶接部6に跨っており、各第1レール46a、46b上に立設された脚部50a、50b、及び当該各脚部50a、50bの上部に架設された梁部52から構成されている。
【0023】
そして、当該梁部52には、当該梁部52の長手方向に沿って摺動可能な配送機構54(配送手段)が設けられている。
当該配送機構54は、昇降するポスト部材56の下端にクランプハンド58が設けられている。当該クランプハンド58は、板材の上部を把持するとともに、ポスト部材56の長手方向を回転軸として回転可能である。つまり、第1門型フレーム48に設けられている当該配送機構54は、直交3軸に1つの回転軸を加えた可動範囲を有しており、倒立した板材を確実に配送することができるとともに、溶接に適した方向に板材を配設することができる。
【0024】
溶接部6は、上記板材倒立部2より一側にて、上記第1レール46a、46bと同一方向に延びて敷設された一対の第2レール60a、60b及び、当該第2レール60a、60b上を走行する2機の第2門型フレーム62、62を有している。なお、当該2機の第2門型フレーム62、62はそれぞれ同様の構成をなしており、以下1機の第2門型フレーム62について説明する。
【0025】
当該第2門型フレーム62は、第2レール60a、60b上に立設された脚部64a、64b、当該各脚部64a、64bの上部に架設された梁部66から構成されている。
そして、当該梁部66の長手方向中央部には、図1及び2の一点鎖線で示す領域Bを可動範囲とし、板材に仮溶接を施す溶接ロボット68(溶接手段)が設けられている。
また、一対の第2レール60a、60bの間には溶接ロボット68により仮溶接された後のサブユニットを一方向に搬送する台車コンベア70が設けられている。
【0026】
以下、このように構成された本発明に係る部材ハンドリング装置を備えたサブユニット組立装置におけるサブユニット組立工程について説明する。
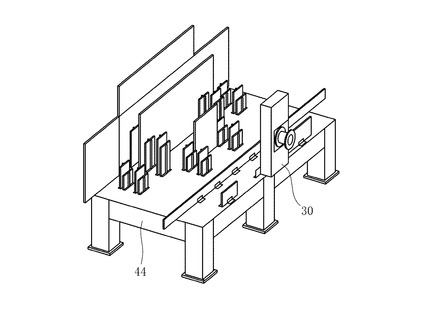
図6乃至8を参照すると、図6には倒立用ロボット10の板材倒立作業工程図、図7には倒立用ロボット10のマグネットハンド30による板材配設時の斜視図、図8には配送機構54のクランプハンド58による板材把持時の斜視図、図9には本発明に係る部材ハンドリング装置において各板材の形状に応じたマジックハンド30の吸着位置を例示した図がそれぞれ示されている。
【0027】
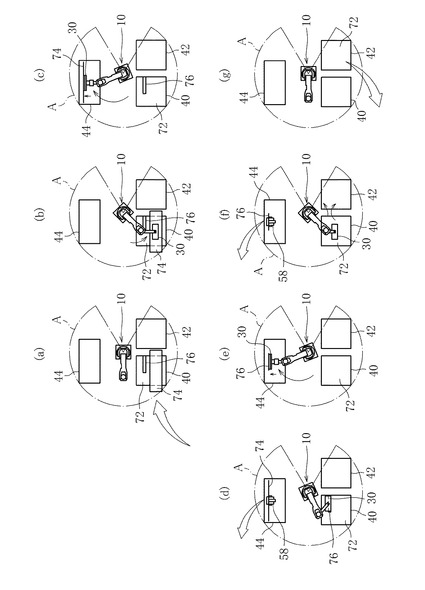
当該サブユニット組立工程では、鋼材から切断された種々の形状の板材がパレット72上に平置きされて、フォークリフト等の搬送手段により、図6(a)に示すように、倒立用ロボット10周囲のパレット置場40に配設される。なお、図6(a)では、パレット置場40に配設されたパレット72上に、比較的面積の大きな大板材74及び比較的面積の小さな小板材76が載っているものとする。
【0028】
そして、図6(b)、(c)、図5に示すように、倒立用ロボット10のマグネットハンド30がパレット72上に平置きされた大板材74を吸着し、当該大板材74を倒立させながら倒立板材置場44へハンドリングする。そして、当該倒立ロボット10は当該大板材74の形状に応じた支持部材44aに支持されて倒立するよう配設する。
倒立板材置場44に配設された大板材74は、図6(d)、図8に示すように、配送機構54のクランプハンド58により把持され、溶接部6へと配送される。このとき、当該クランプハンド58は大板材74の上部を把持して持ち上げて配送する。また、倒立用ロボット10はマグネットハンド30により小板材76を吸着し、図6(e)に示すように、当該小板材76を倒立板材置場44に配設する。そして、図6(f)に示すように、当該小板材76も配送機構54のクランプハンド58により溶接部6へと配送される。
【0029】
また、倒立用ロボット10は、図6(f)、(g)に示すように、パレット置場40に置かれたパレット72上に板材がなくなった場合には、マグネットハンド30により当該パレット72を吸着し、空パレット置場42に配設する。そして、空のパレット72は図示しないフォークリフト等の搬送手段により搬送される。
溶接部6へと配送された各板材は、溶接ロボット68により仮溶接が施されサブユニットが製作され、当該サブユニットは台車コンベア70に載せられて次の工程へと移行する。
【0030】
以上のように、当該サブユニット組立装置1は、パレット72上に平置きされた板材を、倒立用ロボット10により倒立させて倒立部材置場44に配設し、当該倒立された板材を配送機構54のクランプハンド58により把持して溶接部6へと配送する。
ここで、板材倒立部2に搬送される板材は、上記大板材74や小板材76の他にも、図9に示すように様々な形状のものがある。
【0031】
それに対して、倒立用ロボット10に設けられているマグネットハンド30は、板材の形状及び重量に応じて選択的に複数の電磁石36のうちの一部または全て使用して当該板材を吸着する。
当該マグネットハンド30に設けられている各電磁石36は、搬送されてくる板材の中で最も幅狭な板材(例えば図9(d)、(e)の板材)よりも小幅な吸着面に形成されていることから、どの板材であっても少なくとも1つの電磁石36の吸着面がはみ出ることなく吸着される。
【0032】
また、マグネットハンド30は、一平面上にて長辺及び短辺からなる矩形状の縁部及び中央部に電磁石36が配設されていることで、図9に示すように、細い板材や面積の大きな板材等であっても、板材の重心位置及びその周囲を確実に吸着することができる。さらに、板材の大きさに応じて長辺及び短辺の使用する電磁石36を使い分けられることで、倒立板材置場44の支持部材44aに対応する位置を残しつつ吸着し、当該倒立板材置場44への配設を容易に行うことができる。
【0033】
そして、当該倒立用ロボット10により、平置きされた板材を倒立板材置場44に倒立させた状態で配設することで、クランプハンド58による板材の把持が容易となり、部材を円滑に受け渡すことができる。
以上で本発明に係る部材ハンドリング装置の実施形態についての説明を終えるが、実施形態は上記実施形態に限られるものではない。
【0034】
例えば、上記実施形態では、本発明に係る倒立用ロボット10を造船におけるサブユニット組立装置1に適用させているが、当該倒立用ロボット10の使用はこれに限られるものではなく、他にも組立装置等に適用させてもよい。
また、上記実施形態では、長辺及び短辺からなる略矩形状の縁部及び中央部に電磁石を配設しているが、当該電磁石の配列はこれに限られるものではなく、搬送されてくる部材の形状に適応した配列であればよい。
【0035】
また、上記実施形態では、倒立用ロボット10は6軸多関節ロボットであるが、部材ハンドリング装置はこれに限られるものではなく、可動自在な腕部を有する装置であればよい。
【符号の説明】
【0036】
1 サブユニット組立装置
2 板材倒立部
4 配送部
6 溶接部
10 倒立用ロボット(部材ハンドリング装置)
16 第1アーム
18 第2アーム(腕部)
30 マグネットハンド(マグネットハンド部)
32 支軸
34 本体部
34a 主桁
34b 補助桁
36 電磁石
54 配送機構
58 クランプハンド
68 溶接ロボット
70 台車コンベア
72 パレット
74 大板材
76 小板材
【技術分野】
【0001】
本発明は、部材の取り回しを行う部材ハンドリング装置に関する。
【背景技術】
【0002】
造船等においては、鋼材から切断された板材を配送し仮溶接するサブユニット組立ラインを経てブロックが製作される。
つまり、当該サブユニット組立ラインでは、ブロックを形成するためのサブユニットが製作される。
当該サブユニット組立ラインの構成としては、例えば、溶接ラインに沿って走行する門型台車に、旋回アームを有し溶接ラインと直交する方向に移動する横行台車を設けて、旋回アームの先端部の把持装置により板材等の骨材を把持して溶接位置に配送する構成がある(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第2564064号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に開示された技術では、レールの外側に配置された骨材パレット上にある骨材を把持装置により把持して持ち上げて所定位置に配送しているが、当該把持装置では、パレット上に平置きされるような板材を把持することは困難である。
鋼材から切断された板材は様々な形状をなしている上、通常はパレット上に平置きされて当該サブユニット組立ラインに運ばれてくる。このような板材を溶接位置まで円滑に配送するには、パレット上に平置きされた板材を、配送手段に円滑に受け渡す手段が必要となる。
【0005】
本発明はこのような問題を解決するためになされたもので、その目的とするところは、平置きされた種々の形状をなす部材を倒立させ次の工程へと円滑に受け渡しすることのできる部材ハンドリング装置を提供することにある。
【課題を解決するための手段】
【0006】
上記した目的を達成するために、請求項1の部材ハンドリング装置では、形状の異なる複数の部材を取り回し可能な部材ハンドリング装置であって、可動自在な腕部と、該腕部の先端に設けられ、前記形状の異なる複数の部材のうち最も幅狭な部材よりも小幅な吸着面に形成された電磁石が一平面に複数配設されており、前記部材の形状または重量に応じて選択的に該複数の電磁石のうちの一部または全てを使用して該部材を吸着するマグネットハンド部とを備えることを特徴としている。
【0007】
請求項2の部材ハンドリング装置では、請求項1において、前記マグネットハンド部は、前記一平面にて長辺及び短辺からなる矩形状の縁部に沿って前記電磁石が配設されていることを特徴としている。
請求項3の部材ハンドリング装置では、請求項2において、前記マグネットハンド部は、前記矩形状の中心部にも前記電磁石が配設されていることを特徴としている。
【0008】
請求項4の部材ハンドリング装置では、請求項1乃至3のいずれかにおいて、前記マグネットハンド部は、平置きされた前記部材を吸着し、該部材を所定の倒立置場に倒立させた状態で配設することを特徴としている。
【発明の効果】
【0009】
上記手段を用いる本発明の請求項1の部材ハンドリング装置によれば、形状の異なる複数の部材を取り回し可能な部材ハンドリング装置において、可動自在な腕部の先端に、形状の異なる複数の部材のうち最も幅狭な部材よりも小幅な吸着面からなる電磁石が一平面に複数配設され、部材の形状に応じて選択的に当該複数の電磁石のうちの一部または全て使用して部材を吸着するマグネットハンド部を設ける。
【0010】
つまり、形状の異なる複数の部材のうち最も幅狭な部材よりも小幅な吸着面に形成された複数の電磁石を部材の形状に応じて選択的に使用することで、どの部材でも少なくとも1つの電磁石の吸着面を部材の一面からはみ出ることなく確実に吸着させることができる。
これにより、1つのマグネットハンド部により、小さな部材から大きな部材までを確実に吸着し、次の工程への受け渡しを円滑に行うことができる。
【0011】
請求項2の部材ハンドリング装置によれば、マグネットハンド部は、一平面上にて長辺及び短辺からなる矩形状の縁部に沿って電磁石が配設されている。
つまり、例えば細長い板材である場合には長辺に沿って配設された電磁石で吸着し、短い板材である場合には短辺に沿った電磁石で吸着する等、部材の形状に合わせて確実に吸着することができる。
【0012】
このように部材の形状に合わせた位置で吸着することができることで、次の工程での部材の受け渡しを容易なものとすることができる。
請求項3の部材ハンドリング装置によれば、マグネットハンド部は、矩形状の中心部にも電磁石が配設されている。
これにより、例えば面積の大きな部材の場合でも、当該部材の重心位置を確実に吸着しつつ、矩形状の縁部にある電磁石でも吸着することで、当該部材を確実に吸着することができる。
【0013】
請求項4の部材ハンドリング装置によれば、前記マグネットハンド部は、平置きされた前記部材を吸着し、腕部の可動とともに、当該部材を所定の倒立置場に倒立させた状態で配設する。
このように、平置きされた部材を所定の倒立置場に倒立させた状態で配設することで、次の工程における当該部材のピッキングが容易となり、部材を円滑に受け渡すことができる。
【図面の簡単な説明】
【0014】
【図1】本発明に係る部材ハンドリング装置を備えたサブユニット組立装置の平面図である。
【図2】本発明に係る部材ハンドリング装置を備えたサブユニット組立装置の正面図である。
【図3】本発明に係る部材ハンドリング装置を備えたサブユニット組立装置の側面図である。
【図4】マグネットハンドの斜視図である。
【図5】マグネットハンドの斜視図である。
【図6】倒立用ロボットの板材倒立作業工程図である。
【図7】倒立用ロボットのマグネットハンドによる板材配設時の斜視図である。
【図8】配送機構のクランプハンドによる板材把持時の斜視図である。
【図9】本発明に係る部材ハンドリング装置において各板材の形状に応じたマジックハンドの吸着位置を例示した図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態を図面に基づき説明する。
図1乃至3には本発明に係る部材ハンドリング装置を備えたサブユニット組立装置の平面図、正面図、側面図、図4、5にはマグネットハンドの斜視図がそれぞれ示されている。
図1乃至3には、造船ラインの一部に設けられたサブユニット組立装置1が示されている。
【0016】
本実施形態におけるサブユニット組立装置1は、主に、平置きされた板材を倒立させる板材倒立部2、倒立された板材を配送する配送部4、配送された板材に仮溶接を施す溶接部6から構成されている。
板材倒立部2は、倒立用ロボット10(部材ハンドリング装置)を有している。
当該倒立用ロボット10は、所謂6軸多関節ロボットである。詳しくは、当該倒立用ロボット10は、基台12に回転台14が載置され、当該回転台14に第1アーム16の一端が連結されている。そして、当該第1アーム16の他端には第2アーム18(腕部)が連結されており、当該第2アーム18の先端部分には回転連結部20を介してマグネットハンド30(マグネットハンド部)が設けられている。
【0017】
当該倒立用ロボット10は、図1乃至3に一点鎖線で示す領域Aの範囲でハンドリング可能である。
また、マグネットハンド30は、詳しくは図4、5に示すように、回転連結部20と支軸32を介して連結された本体部34の一側面に複数個の電磁石36が配設されている。
本体部34は、断面I字状の主桁34aが支軸32の軸方向と垂直をなす一方向に延びているとともに、当該主桁34aを垂直に貫通する複数の補助桁34bが当該主桁34aの一端から他端にかけて所定の間隔で並設されている。
【0018】
電磁石36は、主桁34aの中央部、及び各補助桁34bの両端部にそれぞれ設けられている。これは、平面視において、主桁34a両端部の補助桁34bに設けられた電磁石36を短辺、その他の補助桁34bに設けられた電磁石36を長辺とする略矩形状に配設されている。また、当該矩形状の中心部に主桁34a中央部に設けられた電磁石36が位置している。
【0019】
当該電磁石36は円筒状をなしており、端面である吸着面は、板材倒立部2に搬送される形状の異なる複数の部材のうち最も幅狭な部材よりも小幅に形成されている。
例えば、板材倒立部2に搬送される板材の中で最も幅狭な板材が幅100mmの長板材である場合は、電磁石36の吸着面の直径は当該長板材の幅より小径な90mmを使用する。
【0020】
このように構成されたマグネットハンド30は、板材の形状及び重量に応じて選択的に複数の電磁石36のうちの一部または全てに電力を供給されることで、板材を吸着するものである。
また、当該倒立用ロボット10の周囲には、図示しないフォークリフト等により板材の載ったパレットが配設されるパレット置場40、空になったパレットが配設される空パレット置場42、倒立状態で板材が配設される倒立板材置場44が形成されている。
【0021】
当該倒立板材置場44上には、板材を倒立状態で支持する支持部材44aが複数設けられている。当該各支持部材44aは、板材の形状に対応し、板材の下部の少なくとも2箇所に位置するよう配設されており、各箇所において当該板材を挟むように立設された一対の支持板で構成されている。なお、面積の大きな板材を支持するための支持板は上方に長く、面積の小さな板材を支持するための支持板は上方に短い形状をなしている。
【0022】
配送部4は、板材倒立部2及び溶接部6を間に挟むよう敷設された一対の第1レール46a、46b及び当該第1レール46a、46b上を走行する2機の第1門型フレーム48、48を有している。なお、当該2機の第1門型フレーム48、48はそれぞれ同様の構成をなしており、以下1機の第1門型フレーム48について説明する。
当該第1門型フレーム48は、板材倒立部2及び溶接部6に跨っており、各第1レール46a、46b上に立設された脚部50a、50b、及び当該各脚部50a、50bの上部に架設された梁部52から構成されている。
【0023】
そして、当該梁部52には、当該梁部52の長手方向に沿って摺動可能な配送機構54(配送手段)が設けられている。
当該配送機構54は、昇降するポスト部材56の下端にクランプハンド58が設けられている。当該クランプハンド58は、板材の上部を把持するとともに、ポスト部材56の長手方向を回転軸として回転可能である。つまり、第1門型フレーム48に設けられている当該配送機構54は、直交3軸に1つの回転軸を加えた可動範囲を有しており、倒立した板材を確実に配送することができるとともに、溶接に適した方向に板材を配設することができる。
【0024】
溶接部6は、上記板材倒立部2より一側にて、上記第1レール46a、46bと同一方向に延びて敷設された一対の第2レール60a、60b及び、当該第2レール60a、60b上を走行する2機の第2門型フレーム62、62を有している。なお、当該2機の第2門型フレーム62、62はそれぞれ同様の構成をなしており、以下1機の第2門型フレーム62について説明する。
【0025】
当該第2門型フレーム62は、第2レール60a、60b上に立設された脚部64a、64b、当該各脚部64a、64bの上部に架設された梁部66から構成されている。
そして、当該梁部66の長手方向中央部には、図1及び2の一点鎖線で示す領域Bを可動範囲とし、板材に仮溶接を施す溶接ロボット68(溶接手段)が設けられている。
また、一対の第2レール60a、60bの間には溶接ロボット68により仮溶接された後のサブユニットを一方向に搬送する台車コンベア70が設けられている。
【0026】
以下、このように構成された本発明に係る部材ハンドリング装置を備えたサブユニット組立装置におけるサブユニット組立工程について説明する。
図6乃至8を参照すると、図6には倒立用ロボット10の板材倒立作業工程図、図7には倒立用ロボット10のマグネットハンド30による板材配設時の斜視図、図8には配送機構54のクランプハンド58による板材把持時の斜視図、図9には本発明に係る部材ハンドリング装置において各板材の形状に応じたマジックハンド30の吸着位置を例示した図がそれぞれ示されている。
【0027】
当該サブユニット組立工程では、鋼材から切断された種々の形状の板材がパレット72上に平置きされて、フォークリフト等の搬送手段により、図6(a)に示すように、倒立用ロボット10周囲のパレット置場40に配設される。なお、図6(a)では、パレット置場40に配設されたパレット72上に、比較的面積の大きな大板材74及び比較的面積の小さな小板材76が載っているものとする。
【0028】
そして、図6(b)、(c)、図5に示すように、倒立用ロボット10のマグネットハンド30がパレット72上に平置きされた大板材74を吸着し、当該大板材74を倒立させながら倒立板材置場44へハンドリングする。そして、当該倒立ロボット10は当該大板材74の形状に応じた支持部材44aに支持されて倒立するよう配設する。
倒立板材置場44に配設された大板材74は、図6(d)、図8に示すように、配送機構54のクランプハンド58により把持され、溶接部6へと配送される。このとき、当該クランプハンド58は大板材74の上部を把持して持ち上げて配送する。また、倒立用ロボット10はマグネットハンド30により小板材76を吸着し、図6(e)に示すように、当該小板材76を倒立板材置場44に配設する。そして、図6(f)に示すように、当該小板材76も配送機構54のクランプハンド58により溶接部6へと配送される。
【0029】
また、倒立用ロボット10は、図6(f)、(g)に示すように、パレット置場40に置かれたパレット72上に板材がなくなった場合には、マグネットハンド30により当該パレット72を吸着し、空パレット置場42に配設する。そして、空のパレット72は図示しないフォークリフト等の搬送手段により搬送される。
溶接部6へと配送された各板材は、溶接ロボット68により仮溶接が施されサブユニットが製作され、当該サブユニットは台車コンベア70に載せられて次の工程へと移行する。
【0030】
以上のように、当該サブユニット組立装置1は、パレット72上に平置きされた板材を、倒立用ロボット10により倒立させて倒立部材置場44に配設し、当該倒立された板材を配送機構54のクランプハンド58により把持して溶接部6へと配送する。
ここで、板材倒立部2に搬送される板材は、上記大板材74や小板材76の他にも、図9に示すように様々な形状のものがある。
【0031】
それに対して、倒立用ロボット10に設けられているマグネットハンド30は、板材の形状及び重量に応じて選択的に複数の電磁石36のうちの一部または全て使用して当該板材を吸着する。
当該マグネットハンド30に設けられている各電磁石36は、搬送されてくる板材の中で最も幅狭な板材(例えば図9(d)、(e)の板材)よりも小幅な吸着面に形成されていることから、どの板材であっても少なくとも1つの電磁石36の吸着面がはみ出ることなく吸着される。
【0032】
また、マグネットハンド30は、一平面上にて長辺及び短辺からなる矩形状の縁部及び中央部に電磁石36が配設されていることで、図9に示すように、細い板材や面積の大きな板材等であっても、板材の重心位置及びその周囲を確実に吸着することができる。さらに、板材の大きさに応じて長辺及び短辺の使用する電磁石36を使い分けられることで、倒立板材置場44の支持部材44aに対応する位置を残しつつ吸着し、当該倒立板材置場44への配設を容易に行うことができる。
【0033】
そして、当該倒立用ロボット10により、平置きされた板材を倒立板材置場44に倒立させた状態で配設することで、クランプハンド58による板材の把持が容易となり、部材を円滑に受け渡すことができる。
以上で本発明に係る部材ハンドリング装置の実施形態についての説明を終えるが、実施形態は上記実施形態に限られるものではない。
【0034】
例えば、上記実施形態では、本発明に係る倒立用ロボット10を造船におけるサブユニット組立装置1に適用させているが、当該倒立用ロボット10の使用はこれに限られるものではなく、他にも組立装置等に適用させてもよい。
また、上記実施形態では、長辺及び短辺からなる略矩形状の縁部及び中央部に電磁石を配設しているが、当該電磁石の配列はこれに限られるものではなく、搬送されてくる部材の形状に適応した配列であればよい。
【0035】
また、上記実施形態では、倒立用ロボット10は6軸多関節ロボットであるが、部材ハンドリング装置はこれに限られるものではなく、可動自在な腕部を有する装置であればよい。
【符号の説明】
【0036】
1 サブユニット組立装置
2 板材倒立部
4 配送部
6 溶接部
10 倒立用ロボット(部材ハンドリング装置)
16 第1アーム
18 第2アーム(腕部)
30 マグネットハンド(マグネットハンド部)
32 支軸
34 本体部
34a 主桁
34b 補助桁
36 電磁石
54 配送機構
58 クランプハンド
68 溶接ロボット
70 台車コンベア
72 パレット
74 大板材
76 小板材
【特許請求の範囲】
【請求項1】
形状の異なる複数の部材を取り回し可能な部材ハンドリング装置であって、
可動自在な腕部と、
該腕部の先端に設けられ、前記形状の異なる複数の部材のうち最も幅狭な部材よりも小幅な吸着面に形成された電磁石が一平面に複数配設されており、前記部材の形状または重量に応じて選択的に該複数の電磁石のうちの一部または全てを使用して該部材を吸着するマグネットハンド部と、
を備えることを特徴とする部材ハンドリング装置。
【請求項2】
前記マグネットハンド部は、前記一平面にて長辺及び短辺からなる矩形状の縁部に沿って前記電磁石が配設されていることを特徴とする請求項1記載の部材ハンドリング装置。
【請求項3】
前記マグネットハンド部は、前記矩形状の中心部にも前記電磁石が配設されていることを特徴とする請求項2記載の部材ハンドリング装置。
【請求項4】
前記マグネットハンド部は、平置きされた前記部材を吸着し、該部材を所定の倒立置場に倒立させた状態で配設することを特徴とする請求項1乃至3のいずれか記載の部材ハンドリング装置。
【請求項1】
形状の異なる複数の部材を取り回し可能な部材ハンドリング装置であって、
可動自在な腕部と、
該腕部の先端に設けられ、前記形状の異なる複数の部材のうち最も幅狭な部材よりも小幅な吸着面に形成された電磁石が一平面に複数配設されており、前記部材の形状または重量に応じて選択的に該複数の電磁石のうちの一部または全てを使用して該部材を吸着するマグネットハンド部と、
を備えることを特徴とする部材ハンドリング装置。
【請求項2】
前記マグネットハンド部は、前記一平面にて長辺及び短辺からなる矩形状の縁部に沿って前記電磁石が配設されていることを特徴とする請求項1記載の部材ハンドリング装置。
【請求項3】
前記マグネットハンド部は、前記矩形状の中心部にも前記電磁石が配設されていることを特徴とする請求項2記載の部材ハンドリング装置。
【請求項4】
前記マグネットハンド部は、平置きされた前記部材を吸着し、該部材を所定の倒立置場に倒立させた状態で配設することを特徴とする請求項1乃至3のいずれか記載の部材ハンドリング装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−264522(P2010−264522A)
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願番号】特願2009−115550(P2009−115550)
【出願日】平成21年5月12日(2009.5.12)
【出願人】(000000099)株式会社IHI (5,014)
【出願人】(502422351)株式会社アイ・エイチ・アイ マリンユナイテッド (159)
【Fターム(参考)】
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願日】平成21年5月12日(2009.5.12)
【出願人】(000000099)株式会社IHI (5,014)
【出願人】(502422351)株式会社アイ・エイチ・アイ マリンユナイテッド (159)
【Fターム(参考)】
[ Back to top ]