
配管検査装置
【課題】簡単な構造で、曲がり管、分岐管等にて、所望の方向に移動させることができる配管検査装置を提供する。
【解決手段】本発明の配管検査装置は、少なくとも1個の駆動ユニットと少なくとも1個の検査ユニットとを有し、検査対象の配管内に挿入可能である。駆動ユニットは、複数の駆動部と、複数の連結部と、前記駆動部及び前記連結部を通る2本の操縦用ケーブルと、該操縦用ケーブルの張力を調節する張力調節部とを有する。駆動部はモータによって回転可能な車軸と、該車軸に装着された車輪とを有し、前記駆動部と前記連結部は連結軸によって互いに枢動可能に接続されている。
【解決手段】本発明の配管検査装置は、少なくとも1個の駆動ユニットと少なくとも1個の検査ユニットとを有し、検査対象の配管内に挿入可能である。駆動ユニットは、複数の駆動部と、複数の連結部と、前記駆動部及び前記連結部を通る2本の操縦用ケーブルと、該操縦用ケーブルの張力を調節する張力調節部とを有する。駆動部はモータによって回転可能な車軸と、該車軸に装着された車輪とを有し、前記駆動部と前記連結部は連結軸によって互いに枢動可能に接続されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は配管の内部を検査するための配管検査装置に関し、特に、配管の内部に挿入するように構成された配管検査装置に関する。
【背景技術】
【0002】
ガス、上下水道等の供給設備、化学プラント等では、配管の内部を検査する技術が必要である。配管の内部を検査するには、配管内に検査装置を挿入することが好ましい。
【0003】
特許文献1及び非特許文献1には、配管の内部を移動しながら配管の内面を検査するための装置の例が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許5172639号
【非特許文献】
【0005】
【非特許文献1】「複合配管構造の内部検査用の蛇状ロボット(PIKo)」”The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, October 11-15, 2009 St. Louis, USA
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1及び非特許文献1には、配管が水平に配置されている場合のみならず垂直に配置された場合にも、配管に沿って上方又は下方に推進することができる蛇状ロボットが記載されている。
配管の内部を移動しながら配管の内面を検査する装置では、Y字管、T字管等の分岐管、L字管等の曲がり管にて、所望の方向に移動させる必要がある。これを実現させるために上述のように蛇状ロボットが開発されているが、構造が極めて複雑となる。また、複数の駆動系を管路形状に応じて協調制御する必要があり、制御系の構成も複雑となる。
更に、特許文献1及び非特許文献1に記載された蛇状ロボットでは、小型化が困難である。
本発明の目的は、簡単な構造で、曲がり管、分岐管等にて、所望の方向に移動させることができる配管検査装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明の配管検査装置は、少なくとも1個の駆動ユニットと少なくとも1個の検査ユニットとを有し、検査対象の配管内に挿入可能である。
【0008】
駆動ユニットは、複数の駆動部と、複数の連結部と、前記駆動部及び前記連結部を通る2本の操縦用ケーブルと、該操縦用ケーブルの張力を調節する張力調節部とを有する。
【0009】
駆動部はモータによって回転可能な車軸と、該車軸に装着された車輪とを有し、前記駆動部と前記連結部は連結軸によって互いに枢動可能に接続されている。
【0010】
2本の操縦用ケーブルを互いに同一の張力によって引っ張ることによって、駆動ユニットはジグザグ状に屈折し、前記駆動部の各々は前記配管の内壁に接触した状態で、直進する。
【0011】
2本の操縦用ケーブルを互いに異なる張力によって引っ張ることによって、駆動ユニットはジグザグ状に屈折し且つ螺旋状に配列され、前記駆動部の各々は前記配管の内壁に接触した状態で、螺旋状に進む。
【発明の効果】
【0012】
本発明によると、簡単な構造で、曲がり管、分岐管等にて、所望の方向に移動させることができる配管検査装置を提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明による配管検査装置が配管内を移動している状態を示す図である。
【図2】本発明による配管検査装置の駆動ユニットの外観を示す図である。
【図3】図3A、図3B、及び、図3Cは、本発明による配管検査装置の駆動ユニットの一部の構造を説明する図である。
【図4】図4A、図4B、及び、図4Cは、本発明による配管検査装置の駆動ユニットがジグザグ状に屈折している状態を説明する図である。
【図5】図5A、図5B、及び、図5Cは、本発明による配管検査装置の駆動ユニットがジグザグ状に屈折し且つ螺旋状に配列されている状態を説明する図である。
【図6】図6A、図6B、及び、図6Cは、本発明による配管検査装置がT字管を直進している状態を示す図である。
【図7】図7A、図7B、及び、図7Cは、本発明による配管検査装置がT字管を曲がって進んでいる状態を示す図である。
【図8】本発明による配管検査装置の駆動部及び連結部の構成の例を示す図である。
【発明を実施するための形態】
【0014】
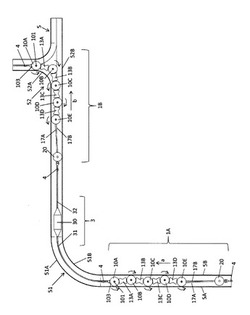
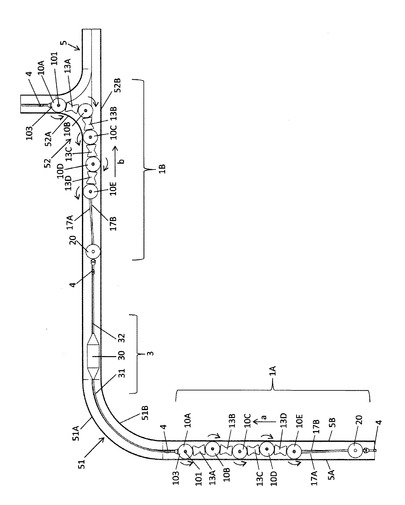
図1を参照して本発明の配管検査装置の例を説明する。本例の配管検査装置は、少なくとも1つの駆動ユニット1A、1Bと少なくとも1つの検査ユニット3を有する。図1には、2個の駆動ユニット、即ち、第1及び第2の駆動ユニット1A、1Bが例示されている。本例の配管検査装置は、配管5の内部を移動するように構成されている。検査ユニット3は検査デバイス30とその両側に接続されたケーブル31、32を有する。検査デバイス30には、配管の内面を検査するための検査素子が装填されている。検査素子は、検査の内容、目的、対象により異なる。検査ユニット3と駆動ユニットの間、駆動ユニット同士の間はコネクタ4によって接続されている。
【0015】
駆動ユニット1A、1Bには信号を伝送する信号線、電力を供給する電力ケーブルが接続されているが、図1では省略されている。
【0016】
第1の駆動ユニット1Aを例として説明する。第1の駆動ユニット1Aは、複数の駆動部10A〜10Eと複数の連結部13A〜13Dと張力調節部20を有する。図示の駆動ユニット1Aは、5個の駆動部10A〜10Eと4個の連結部13A〜13Dを有するが、駆動部と連結部の数は同一であってもよく、異なってもよい。しかしながら、駆動ユニットの先頭には駆動部10Aが接続される。
【0017】
全ての駆動部10A〜10Eは同一構造であってよい。駆動部10Aは、車軸101と車輪103を有する。車軸101は、図示しないモータに接続されている。車輪103が回転することにより、駆動部10Aは前進又は後退する。全ての駆動部の車軸にモータを接続してもよいが、幾つかの駆動部では、車軸にモータを接続しなくてもよい。例えば、最後部の駆動部では、車軸にモータを接続しなくてもよい。駆動部の構造は、詳細な構造は後に説明する。
【0018】
駆動部と連結部を2本の操縦用ケーブル17A、17Bが貫通している。2本の操縦用ケーブル17A、17Bは、先頭の駆動部から後尾の駆動部まで貫通しており、その後端は、張力調節部20に接続されている。2本の操縦用ケーブル17A、17Bは、張力調節部20によって引っ張られる。張力調節部20は2本の操縦用ケーブル17A、17Bの張力を独立に調節することができる。張力調節部20の構造の例は後に説明する。
【0019】
2本の操縦用ケーブル17A、17Bの機能を説明する。2本の操縦用ケーブル17A、17Bを互いに同一の張力によって引っ張ることによって、図示のように複数の駆動部10A〜10Eはジグザグ状に屈折して配列される。図示の例では、先頭の駆動部10Aの車輪は、配管の一方の側の壁5Aの内面に接触しており、2番目の駆動部10Bの車輪は、配管の他方の側の壁5Bの内面に接触している。奇数番目の駆動部10A、10C、10Eの車輪は、配管の一方の側の壁5Aの内面に接触しており、偶数番目の駆動部10B、10Dの車輪は、配管の他方の側の壁5Bの内面に接触している。奇数番目の駆動部10A、10C、10Eの車輪は、図1において反時計方向に回転し、偶数番目の駆動部10B、10Dの車輪は、図1にて時計方向に回転する。それによって、奇数番目の駆動部10A、10C、10Eは、配管の壁5Aの内面上を矢印a方向に前進し、偶数番目の駆動部10B、10Dは、配管の壁5Bの内面上を矢印a方向に前進する。
【0020】
2本の操縦用ケーブル17A、17Bを互いに異なる張力によって引っ張ることによって、複数の駆動部はジグザグ状に屈折し且つ螺旋状に配列されながら、配管内を螺旋状に進む。これについては、後に詳細に説明する。本例の配管検査装置では、2本の操縦用ケーブル17A、17Bを同一の張力によって引っ張る場合には、各駆動部10A〜10Eは、配管の内壁上を直進するが、2本の操縦用ケーブル17A、17Bを互いに異なる張力によって引っ張る場合には、各駆動部10A〜10Eは、配管の内壁上を螺旋状に進む。本例では、駆動ユニットは、2本の操縦用ケーブル17A、17Bの張力によって常にジグザグ状に屈折し且つ直線状又は螺旋状に配列されており、駆動部の車輪は常に配管の内面に接触している。駆動部の車輪を配管の内面に接触させるための接触力は、2本の操縦用ケーブル17A、17Bの張力の大きさに依存する。
【0021】
本例の配管検査装置を、配管の曲がり部及び分岐にて所望の方向に進行させる方法を説明する。配管の曲がり部又は分岐では、駆動部は、次の条件(1)を満たす必要がある。(1)先頭の駆動部の車軸は、配管の曲がり部又は分岐において配管の中心線を含む平面に垂直に配置される。更に、T字管、又は、Y字管のような配管の分岐では、駆動部は、次の条件(2)を満たす必要がある。(2)先頭の駆動部の車輪は、配管の分岐においては配管の進行すべき方向の内周側の内壁に接触している。
【0022】
先ず、条件(1)について説明する。図1では、配管5は曲がり部51と分岐52を含む。曲がり部51では、配管の中心線を含む平面は、紙面に平行である。従って、曲がり部51では、先頭の駆動部10Aの車軸101は、配管の中心線を含む平面に垂直でなければならない。即ち、先頭の駆動部10Aの車軸101は、紙面に垂直でなければならない。同様に、分岐52では、配管の中心線を含む平面は、紙面に平行である。従って、分岐52では、先頭の駆動部10Aの車軸101は、配管の中心線を含む平面に垂直でなければならない。即ち、先頭の駆動部10Aの車軸101は、紙面に垂直でなければならない。図1の例では、曲がり部51を進む第1の駆動ユニット1Aと、分岐52を通過中の第2の駆動ユニット1Bでは、共に、先頭の駆動部10Aの車軸101は、紙面に垂直である。従って、条件(1)を満たしている。
【0023】
次に条件(2)について説明する。曲がり部51では、進行方向右側に曲がるものとする。曲がり部51では、上述のように条件(2)は必要ない。従って、配管の曲がる側の内周側の壁51Bの内面に、先頭の駆動部10Aの車輪が接触している必要はない。第1の駆動ユニット1Aでは、先頭の駆動部10Aの車輪は、外周側の壁51Aの内面に接触している。従って、条件(2)を満たしていない。しかしながら、先頭の駆動部10Aの車輪は、そのまま、曲がり部51の湾曲した内壁に沿って進行する。
【0024】
分岐52では、進行方向左側に曲がるものとする。従って、配管の曲がる側の内周側の壁52Aの内面に、先頭の駆動部10Aの車輪が接触している必要がある。第2の駆動ユニット1Bでは、先頭の駆動部10Aの車輪は、内周側の壁52Aの内面に接触している。従って、条件(2)を満たしている。
【0025】
本発明の配管検査装置の動作を説明する。本例の配管検査装置を操作するには、先ず、検査対象の配管の設計データ、又は、CADデータを入手する必要である。次に、操作者は、配管検査装置の移動経路を予め設定する。即ち、配管網上の始点と終点を設定し、次に、始点と終点の間の配管網に含まれる曲がり管の曲がり方向と分岐管の分岐の進行方向を予め検出する。こうして、経路に関する情報が得られると、配管検査装置を、始点にて、即ち、配管の入り口より内部に挿入する。駆動ユニットの駆動部を駆動させることにより、配管検査装置は、配管内を自走する。
【0026】
配管検査装置が配管内に進入したら、最も先頭の駆動部の位置をリアルタイムにて検出する必要がある。最も先頭の駆動部の位置を検出するには、配管内に進入した配管検査装置の長さを求めればよい。これは、配管の入り口にて、配管内に挿入された駆動ユニットと検査ユニットの数より求められる。駆動ユニットと検査ユニットの長さは、それぞれ既知である。尚、ここで、駆動ユニットの長さは、配管内においてジグザグ状又は螺旋状に屈折した駆動ユニットを、配管の中心線に沿って測定した長さである。駆動ユニットの長さに個数を乗算することにより、駆動ユニットの長さの合計が得られる。検査ユニットの長さに個数を乗算することにより、検査ユニットの長さの合計が得られる。両者の合計の和が、配管内に挿入された配管検査装置の長さである。尚、配管内に進入した配管検査装置の長さを測定するために、長さ測定用の特別のケーブルを使用してもよい。
【0027】
こうして、配管内に挿入された配管検査装置の長さが求められれば、それと配管の設計データから、配管検査装置の最も先頭の駆動部の位置が得られる。
【0028】
配管検査装置の先頭の駆動部が、配管の曲がり部又は分岐に近づいたら、先頭の駆動部の車軸の方向を検出する必要がある。本例の配管検査装置によると、先頭の駆動部には、車軸の方向を検出するための姿勢検出センサが設けられている。姿勢検出センサは、例えば、加速度計であってよい。姿勢検出センサによって検出された先頭の駆動部の車軸の方向は、リアルタイムにて、操作者に送信される。例えば、先頭の駆動部の姿勢検出センサに接続された信号ケーブルは、配管検査装置に沿って、配管の入り口まで延びている。操作者は、この信号ケーブルを介して、姿勢検出センサの出力を得ることができる。姿勢検出センサは、各駆動ユニットの先端の駆動部に設けられる。従って、各駆動ユニットの先端の駆動部の位置がリアルタイムにて得られる。
【0029】
操作者は、配管検査装置の先頭の駆動部が、配管の曲がり部に近づいたとき、上述の第1の条件が満たされているか否かを判定する。操作者は、配管検査装置の先頭の駆動部が、配管の分岐に近づいたとき、上述の第1及び第2の条件が満たされているか否かを判定する。先頭の駆動部には、配管の内部を撮像する撮像装置、例えば、CCDカメラが設けられてよい。第1の条件が満たされていない場合には、先頭の駆動部の車軸が、配管の中心線を含む平面に垂直となるように、先頭の駆動部を回転させる必要がある。先頭の駆動部を回転させるには、先頭の駆動部を螺旋状に進行させればよい。先頭の駆動部を螺旋状に進行させるには、2つの操縦用ケーブル17A、17Bを互いに異なる張力によって引っ張ればよい。
【0030】
第2の条件が満たされていない場合には、先頭の駆動部の車軸が、進行すべき方向の配管の内周側の内壁に接触するように、先頭の駆動部の車軸の方向を回転させる必要がある。先頭の駆動部の車軸の方向を回転させるには、先頭の駆動部を螺旋状に進行させればよい。先頭の駆動部を螺旋状に進行させるには、2つの操縦用ケーブル17A、17Bを互いに異なる張力によって引っ張ればよい。こうして、2つの操縦用ケーブル17A、17Bを互いに異なる張力によって引っ張ることにより、上述の2つの条件を満たすことができる。操作者は、配管の曲がり部の直前にて、先頭の駆動部の姿勢検出センサからの信号出力より、第1の条件が満たされているか否かを確認することができる。操作者は、配管の分岐の直前にて、先頭の駆動部の姿勢検出センサからの信号出力より、第1及び第2の条件が満たされているか否かを確認することができる。
【0031】
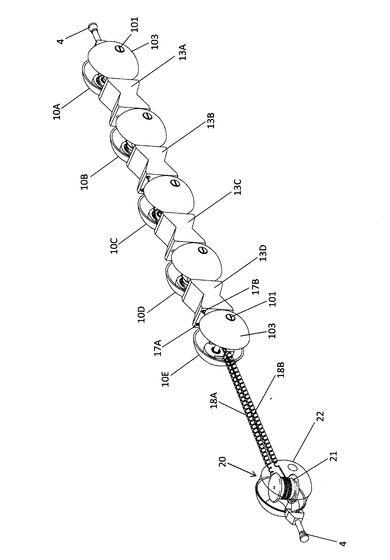
図2は駆動ユニットの例を示す。本例の駆動ユニットは、複数の駆動部10A〜10Eと複数の連結部13A〜13Dと張力調節部20を有する。駆動部と連結部を2本の操縦用ケーブル17A、17Bが貫通している。駆動ユニットの先端と後端には、コネクタ4が接続されている。2本の操縦用ケーブル17A、17Bは、先頭の駆動部から後尾の駆動部まで貫通しており、その後端は、張力調節部20に接続されている。2本の操縦用ケーブル17A、17Bには、バネ18A、18Bが設けられている。これらのバネ 18A、18Bは、それぞれチューブワイヤの内部に格納されている。そのため2本のバネ18A、18Bの引っ張り力によって、コネクタ4の間の駆動ユニットの長さは変えずに2本の操縦用ケーブル17A、17Bに張力を生成できるようになっている。
【0032】
張力調節部20は、操縦用ケーブル17A、17Bを巻き取るためのリール21と車輪22を有する。リール21は図示しないモータによって回転する。リール21によって2本の操縦用ケーブル17A、17Bをそれぞれ逆向きに巻き取ることができる。このリール21の回転で、2本の操縦用ケーブルの張力のバランスを変えることができる。上述のように、先頭の駆動部を螺旋状に進行させるには、2つの操縦用ケーブル17A、17Bを互いに異なる張力になるように一方向に回転させればよい。駆動部を直線状に進行させる場合には、2つの操縦用ケーブル17A、17Bを互いに同一の張力になるようにリール21の回転角度を調整すればよい。
【0033】
操縦用ケーブル17A、17Bを別々のリールで引っ張る機構によってもよい。この場合は、リール駆動機構が2倍必要であり、また配管移動中に常にケーブルを牽引し続ける必要があり、エネルギを常時必要とする。しかしながら、この場合、操縦用ケーブル17A、17Bの張力のバランスのみならず、張力自体が可変となるため、配管内の移動状況に応じて、あるいは、配管から引き出す場合などに、各車輪の配管内壁に接触させる接触力を調整できるという効果を生成する。
【0034】
さらに、操縦用ケーブル17A、17Bを別々のリールで引っ張る機構と同様の効果を、操縦用ケーブル17A、17Bを巻き取るためのリール21と車輪22をコネクタ4の間の駆動ユニットの長さ方向に移動して操縦用ケーブル17A、17Bの張力を同時に変える駆動系を導入することで実現することもできる。
【0035】
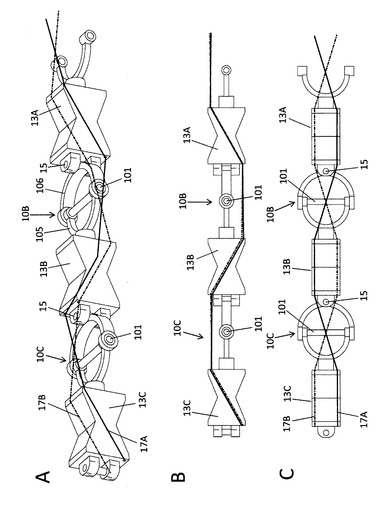
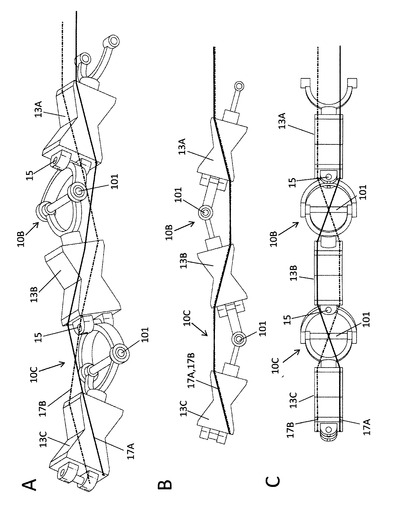
図3A、図3B及び図3Cを参照して、駆動ユニットの構造の例を説明する。図3Aは駆動ユニットの一部を示す斜視図であり、図3Bは駆動ユニットの一部の側面構成を示す図であり、図3Cは駆動ユニットの一部の平面構成を示す図である。ここでは、3つの連結部13A、13B、13Cと第2及び第3の駆動部10B、10Cのみを示す。更に、各駆動部の構造の一部のみを示す。図3Aの第2の駆動部10Bについて説明する。車軸101には車輪が装着されているが、図示は省略されている。車軸101には、アーム105、106が枢動可能に装着されている。一方のアーム105は後側の連結部13Bに装着されている。他方のアーム106は、連結軸15を介して、前側の連結部13Aに接続されている。
【0036】
車軸101の中心軸線は、後側の連結部13Bの中心軸線に直交している。連結軸15の中心軸線は、前側の連結部13Aの中心軸線に直交している。車軸101の中心軸線は、連結軸15の中心軸線に垂直である。車軸101と連結軸15によってジンバル構造が形成される。このジンバル構造によって、2つの連結部13A、13Bは、車軸101の中心軸線周りに互いに他に対して枢動可能であり、連結部13Aと駆動部10Bは、連結軸15の中心軸線周りに互いに他に対して枢動可能である。
【0037】
2本の操縦用ケーブル17A、17Bが、駆動部10B、10Cと連結部13A〜13Cを貫通している。連結部13A〜13Cには、2本の操縦用ケーブル17A、17Bが通るための孔が形成されている。2本の操縦用ケーブル17A、17Bは連結部13A〜13Cに設けられた孔によって拘束される。従って、連結部13A〜13C内における2本の操縦用ケーブル17A、17Bの位置及び経路は一定である。
【0038】
本例では、2本の操縦用ケーブル17A、17Bは引っ張られていない。従って、連結部13A〜13Cは1直線に沿って配置されている。配管検査装置を実際に配管内にて移動させる場合には、必ず、2本の操縦用ケーブル17A、17Bは引っ張られる。図3A、図3B及び図3Cに示す配管検査装置は、未だ、配管内に挿入されていない状態を示す。
【0039】
図3Bに示すように、駆動部の車軸101に垂直な面を想定し、この面に2本の操縦用ケーブル17A、17Bを投影すると、両者は重なり合っている。2本の操縦用ケーブル17A、17Bの投影線は、連結部では、その対角線に沿って走行しており、駆動部では、互い違いに、駆動部の片方側を通っている。図3Cに示すように、連結軸15に垂直な面を想定し、この面に2本の操縦用ケーブル17A、17Bを投影すると、両者は連結部では、平行に走行し、駆動部では交差している。
【0040】
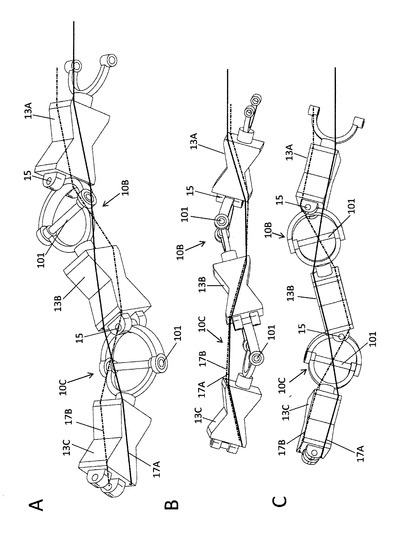
図4A、図4B及び図4Cを参照して、駆動ユニットの動作を説明する。本例では、2本の操縦用ケーブル17A、17Bは同一の張力によって引っ張られている。従って、図4Bに示すように、駆動部の車軸101に垂直な面に2本の操縦用ケーブル17A、17Bを投影すると、2本の操縦用ケーブルの投影線は、図3Bの場合と比較して、直線化している。即ち、2本の操縦用ケーブル17A、17Bを同一の張力によって引っ張ることによって、連結部13A〜13Cは、車軸101の中心軸線周りに互いに枢動する。その結果、図4Bに示すように、駆動部10B、10Cと連結部13A〜13Cは、ジグザグ状に屈折する。図4Cに示すように、駆動部10B、10Cと連結部13A〜13Cは、連結軸15の中心軸線周り枢動していない。本例では、駆動部の車輪が回転すると、車輪が配管の内壁に接触した状態で、駆動部は、配管の内壁に沿って直線的に移動する。
【0041】
図5A、図5B及び図5Cを参照して、駆動ユニットの動作を説明する。本例では、2本の操縦用ケーブル17A、17Bは互いに異なる張力によって引っ張られている。図5Bに示すように、駆動部の車軸101周りに、2つの連結部は互いに枢動しており、更に、図5Cに示すように、連結軸15周りに駆動部と連結部は互いに枢動している。従って、配管検査装置は、ジグザグ状に屈折し且つ螺旋状に配列されている。本例では、駆動部の車輪が回転すると、車輪が配管の内壁に接触した状態で、駆動部は、配管の内壁に沿って螺旋状に移動する。
【0042】
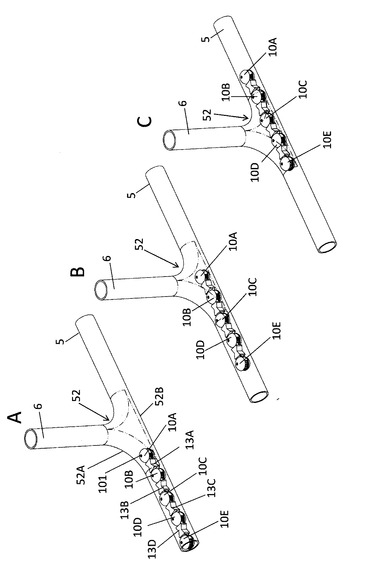
図6A、図6B及び図6Cを参照して、本例の配管検査装置が分岐を移動する場合を説明する。配管5から分岐52において分岐管6が接続されているものとする。本例では、分岐52の直前において、配管検査装置の先頭の駆動部10Aの車軸101は、配管の中心線を含む平面に垂直に配置されていない。従って、上述の条件(1)を満たしていない。従って、このままでは、配管検査装置は、配管5から分岐52を経由して分岐管6に移動することはない。図6B及び図6Cに示すように、配管検査装置は、分岐52を通過して配管5を走行し続ける。
【0043】
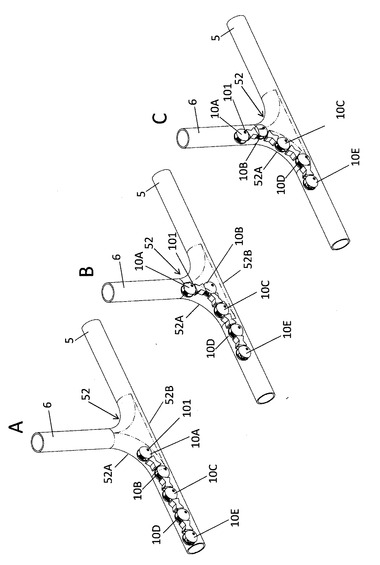
図7A、図7B及び図7Cを参照して、本例の配管検査装置が分岐を移動する場合を説明する。本例では、分岐52の直前において、配管検査装置の先頭の駆動部10Aの車軸101は、配管の中心線を含む平面に垂直に配置されている。従って、上述の条件(1)を満たしている。更に、先頭の駆動部10Aの車輪は、分岐において、進行すべき方向の配管の内周側の壁52Aの内面に接触している。従って、上述の条件(2)を満たしている。従って、配管検査装置は、配管5から分岐52を経由して分岐管6に移動することができる。図7B及び図7Cに示すように、配管検査装置は、分岐52を通過して分岐管6に進路を変更することができる。
【0044】
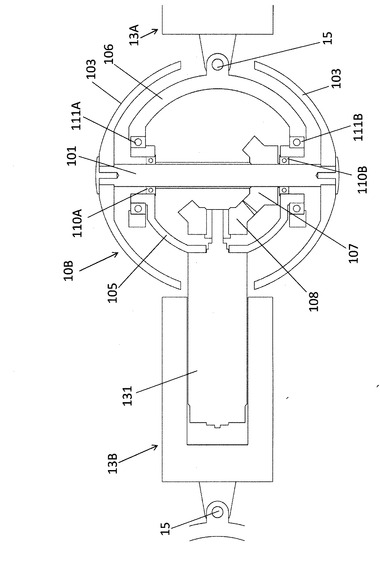
図8を参照して、駆動部と連結部の構造の例を説明する。駆動部10Bは、車軸101と、車軸の両端に装着された半球面状の車輪103と、車軸101に装着された第1の傘歯車107とを有する。車軸101には、玉軸受け110A、110Bを介して第1のアーム105が装着されている。従って、第1のアーム105は、玉軸受け110A、110Bを介して車軸101の周りを自在に回転することができる。第1のアーム105には、玉軸受け111A、111Bを介して、第2のアーム106が装着されている。従って、第2のアーム106は、玉軸受け111A、111Bを介して第1のアーム105に対して自在に枢動することができる。こうして、第1のアーム105と第2のアーム106は、車軸101の中心軸線周りに、互いに他に対して枢動可能である。
【0045】
後側の連結部13Bにはモータ131が装着されている。モータ131の軸には、第2の傘歯車108が装着されている。第2の傘歯車108は第1の傘歯車107に噛み合っている。更に、モータ131には、第1のアーム105が装着されている。尚、モータ131の代わりに後側の連結部13Bに、第1のアーム105が装着されてもよい。上述のように、第1のアーム105は車軸101の中心軸線周りに、枢動可能である。従って、第1のアーム105に接続されたモータ131、及びモータ131を支持する連結部13Bは、車軸101の中心軸線周りに、枢動可能である。
【0046】
第2のアーム106は、連結軸15を介して前側の連結部13Aに枢動可能に接続されている。上述のように、第2のアーム106は車軸101の中心軸線周りに、枢動可能である。従って、第2のアーム106に接続された前側の連結部13Aは、車軸101の中心軸線周りに、枢動可能である。
【0047】
車軸101と連結軸15は直交している。車軸101と連結軸15によってジンバル構造が構成される。また、車軸101とモータ131の軸は直交している。
【0048】
モータ131が駆動すると、その軸に装着された第2の傘歯車108が回転する。第2の傘歯車108の回転は、第1の傘歯車107に伝達され、車軸101が回転する。車軸101が回転すると、車輪103が回転する。
【0049】
2本の操縦用ケーブルの張力を調節することにより、連結部13A、13Bは車軸101周りに枢動する。更に、連結部13Bは連結軸15周りに枢動する。それによって、配管検査装置の駆動ユニットがジグザグ状に屈折し、更に、螺旋状に配列される。
【0050】
図8に示した駆動部の構造は単なる1例である。駆動部と連結部を有する駆動ユニットが、ジグザグ状に屈折し、更に、螺旋状に配列することができれば、他の構造でもよい。例えば、図8の例ではモータ131を連結部に設けたが、モータを駆動部に設けてもよい。更に、本例では、車軸101とモータ131の軸は直交しているが、車軸101とモータ131の軸を同一方向に配置するように構成してもよい。この場合には、傘歯車の代わりに平歯車列が用いられる。更に、本例では、車輪103を半球状に形成しているが、タイヤ状であってもよい。車輪は、金属製であってもよいが、ゴム製であってよい。
【0051】
以上本発明の例を説明したが本発明は上述の例に限定されるものではなく、特許請求の範囲に記載された発明の範囲にて様々な変更が可能であることは、当業者によって容易に理解されよう。
【符号の説明】
【0052】
1A、1B…駆動ユニット、3…検査ユニット、4…コネクタ、5…配管、5A、5B…配管の壁、6…分岐管、10A〜10E…駆動部、13A〜13D…連結部、20…張力調節部、17A、17B…操縦用ケーブル、18A、18B…バネ、21…リール、22…車輪、15…連結軸、30…検査素子、31、32…ケーブル、51…曲がり部、52…分岐、101…車軸、103…車輪、105,106…アーム、107,108…傘歯車、131…モータ
【技術分野】
【0001】
本発明は配管の内部を検査するための配管検査装置に関し、特に、配管の内部に挿入するように構成された配管検査装置に関する。
【背景技術】
【0002】
ガス、上下水道等の供給設備、化学プラント等では、配管の内部を検査する技術が必要である。配管の内部を検査するには、配管内に検査装置を挿入することが好ましい。
【0003】
特許文献1及び非特許文献1には、配管の内部を移動しながら配管の内面を検査するための装置の例が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許5172639号
【非特許文献】
【0005】
【非特許文献1】「複合配管構造の内部検査用の蛇状ロボット(PIKo)」”The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, October 11-15, 2009 St. Louis, USA
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1及び非特許文献1には、配管が水平に配置されている場合のみならず垂直に配置された場合にも、配管に沿って上方又は下方に推進することができる蛇状ロボットが記載されている。
配管の内部を移動しながら配管の内面を検査する装置では、Y字管、T字管等の分岐管、L字管等の曲がり管にて、所望の方向に移動させる必要がある。これを実現させるために上述のように蛇状ロボットが開発されているが、構造が極めて複雑となる。また、複数の駆動系を管路形状に応じて協調制御する必要があり、制御系の構成も複雑となる。
更に、特許文献1及び非特許文献1に記載された蛇状ロボットでは、小型化が困難である。
本発明の目的は、簡単な構造で、曲がり管、分岐管等にて、所望の方向に移動させることができる配管検査装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明の配管検査装置は、少なくとも1個の駆動ユニットと少なくとも1個の検査ユニットとを有し、検査対象の配管内に挿入可能である。
【0008】
駆動ユニットは、複数の駆動部と、複数の連結部と、前記駆動部及び前記連結部を通る2本の操縦用ケーブルと、該操縦用ケーブルの張力を調節する張力調節部とを有する。
【0009】
駆動部はモータによって回転可能な車軸と、該車軸に装着された車輪とを有し、前記駆動部と前記連結部は連結軸によって互いに枢動可能に接続されている。
【0010】
2本の操縦用ケーブルを互いに同一の張力によって引っ張ることによって、駆動ユニットはジグザグ状に屈折し、前記駆動部の各々は前記配管の内壁に接触した状態で、直進する。
【0011】
2本の操縦用ケーブルを互いに異なる張力によって引っ張ることによって、駆動ユニットはジグザグ状に屈折し且つ螺旋状に配列され、前記駆動部の各々は前記配管の内壁に接触した状態で、螺旋状に進む。
【発明の効果】
【0012】
本発明によると、簡単な構造で、曲がり管、分岐管等にて、所望の方向に移動させることができる配管検査装置を提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明による配管検査装置が配管内を移動している状態を示す図である。
【図2】本発明による配管検査装置の駆動ユニットの外観を示す図である。
【図3】図3A、図3B、及び、図3Cは、本発明による配管検査装置の駆動ユニットの一部の構造を説明する図である。
【図4】図4A、図4B、及び、図4Cは、本発明による配管検査装置の駆動ユニットがジグザグ状に屈折している状態を説明する図である。
【図5】図5A、図5B、及び、図5Cは、本発明による配管検査装置の駆動ユニットがジグザグ状に屈折し且つ螺旋状に配列されている状態を説明する図である。
【図6】図6A、図6B、及び、図6Cは、本発明による配管検査装置がT字管を直進している状態を示す図である。
【図7】図7A、図7B、及び、図7Cは、本発明による配管検査装置がT字管を曲がって進んでいる状態を示す図である。
【図8】本発明による配管検査装置の駆動部及び連結部の構成の例を示す図である。
【発明を実施するための形態】
【0014】
図1を参照して本発明の配管検査装置の例を説明する。本例の配管検査装置は、少なくとも1つの駆動ユニット1A、1Bと少なくとも1つの検査ユニット3を有する。図1には、2個の駆動ユニット、即ち、第1及び第2の駆動ユニット1A、1Bが例示されている。本例の配管検査装置は、配管5の内部を移動するように構成されている。検査ユニット3は検査デバイス30とその両側に接続されたケーブル31、32を有する。検査デバイス30には、配管の内面を検査するための検査素子が装填されている。検査素子は、検査の内容、目的、対象により異なる。検査ユニット3と駆動ユニットの間、駆動ユニット同士の間はコネクタ4によって接続されている。
【0015】
駆動ユニット1A、1Bには信号を伝送する信号線、電力を供給する電力ケーブルが接続されているが、図1では省略されている。
【0016】
第1の駆動ユニット1Aを例として説明する。第1の駆動ユニット1Aは、複数の駆動部10A〜10Eと複数の連結部13A〜13Dと張力調節部20を有する。図示の駆動ユニット1Aは、5個の駆動部10A〜10Eと4個の連結部13A〜13Dを有するが、駆動部と連結部の数は同一であってもよく、異なってもよい。しかしながら、駆動ユニットの先頭には駆動部10Aが接続される。
【0017】
全ての駆動部10A〜10Eは同一構造であってよい。駆動部10Aは、車軸101と車輪103を有する。車軸101は、図示しないモータに接続されている。車輪103が回転することにより、駆動部10Aは前進又は後退する。全ての駆動部の車軸にモータを接続してもよいが、幾つかの駆動部では、車軸にモータを接続しなくてもよい。例えば、最後部の駆動部では、車軸にモータを接続しなくてもよい。駆動部の構造は、詳細な構造は後に説明する。
【0018】
駆動部と連結部を2本の操縦用ケーブル17A、17Bが貫通している。2本の操縦用ケーブル17A、17Bは、先頭の駆動部から後尾の駆動部まで貫通しており、その後端は、張力調節部20に接続されている。2本の操縦用ケーブル17A、17Bは、張力調節部20によって引っ張られる。張力調節部20は2本の操縦用ケーブル17A、17Bの張力を独立に調節することができる。張力調節部20の構造の例は後に説明する。
【0019】
2本の操縦用ケーブル17A、17Bの機能を説明する。2本の操縦用ケーブル17A、17Bを互いに同一の張力によって引っ張ることによって、図示のように複数の駆動部10A〜10Eはジグザグ状に屈折して配列される。図示の例では、先頭の駆動部10Aの車輪は、配管の一方の側の壁5Aの内面に接触しており、2番目の駆動部10Bの車輪は、配管の他方の側の壁5Bの内面に接触している。奇数番目の駆動部10A、10C、10Eの車輪は、配管の一方の側の壁5Aの内面に接触しており、偶数番目の駆動部10B、10Dの車輪は、配管の他方の側の壁5Bの内面に接触している。奇数番目の駆動部10A、10C、10Eの車輪は、図1において反時計方向に回転し、偶数番目の駆動部10B、10Dの車輪は、図1にて時計方向に回転する。それによって、奇数番目の駆動部10A、10C、10Eは、配管の壁5Aの内面上を矢印a方向に前進し、偶数番目の駆動部10B、10Dは、配管の壁5Bの内面上を矢印a方向に前進する。
【0020】
2本の操縦用ケーブル17A、17Bを互いに異なる張力によって引っ張ることによって、複数の駆動部はジグザグ状に屈折し且つ螺旋状に配列されながら、配管内を螺旋状に進む。これについては、後に詳細に説明する。本例の配管検査装置では、2本の操縦用ケーブル17A、17Bを同一の張力によって引っ張る場合には、各駆動部10A〜10Eは、配管の内壁上を直進するが、2本の操縦用ケーブル17A、17Bを互いに異なる張力によって引っ張る場合には、各駆動部10A〜10Eは、配管の内壁上を螺旋状に進む。本例では、駆動ユニットは、2本の操縦用ケーブル17A、17Bの張力によって常にジグザグ状に屈折し且つ直線状又は螺旋状に配列されており、駆動部の車輪は常に配管の内面に接触している。駆動部の車輪を配管の内面に接触させるための接触力は、2本の操縦用ケーブル17A、17Bの張力の大きさに依存する。
【0021】
本例の配管検査装置を、配管の曲がり部及び分岐にて所望の方向に進行させる方法を説明する。配管の曲がり部又は分岐では、駆動部は、次の条件(1)を満たす必要がある。(1)先頭の駆動部の車軸は、配管の曲がり部又は分岐において配管の中心線を含む平面に垂直に配置される。更に、T字管、又は、Y字管のような配管の分岐では、駆動部は、次の条件(2)を満たす必要がある。(2)先頭の駆動部の車輪は、配管の分岐においては配管の進行すべき方向の内周側の内壁に接触している。
【0022】
先ず、条件(1)について説明する。図1では、配管5は曲がり部51と分岐52を含む。曲がり部51では、配管の中心線を含む平面は、紙面に平行である。従って、曲がり部51では、先頭の駆動部10Aの車軸101は、配管の中心線を含む平面に垂直でなければならない。即ち、先頭の駆動部10Aの車軸101は、紙面に垂直でなければならない。同様に、分岐52では、配管の中心線を含む平面は、紙面に平行である。従って、分岐52では、先頭の駆動部10Aの車軸101は、配管の中心線を含む平面に垂直でなければならない。即ち、先頭の駆動部10Aの車軸101は、紙面に垂直でなければならない。図1の例では、曲がり部51を進む第1の駆動ユニット1Aと、分岐52を通過中の第2の駆動ユニット1Bでは、共に、先頭の駆動部10Aの車軸101は、紙面に垂直である。従って、条件(1)を満たしている。
【0023】
次に条件(2)について説明する。曲がり部51では、進行方向右側に曲がるものとする。曲がり部51では、上述のように条件(2)は必要ない。従って、配管の曲がる側の内周側の壁51Bの内面に、先頭の駆動部10Aの車輪が接触している必要はない。第1の駆動ユニット1Aでは、先頭の駆動部10Aの車輪は、外周側の壁51Aの内面に接触している。従って、条件(2)を満たしていない。しかしながら、先頭の駆動部10Aの車輪は、そのまま、曲がり部51の湾曲した内壁に沿って進行する。
【0024】
分岐52では、進行方向左側に曲がるものとする。従って、配管の曲がる側の内周側の壁52Aの内面に、先頭の駆動部10Aの車輪が接触している必要がある。第2の駆動ユニット1Bでは、先頭の駆動部10Aの車輪は、内周側の壁52Aの内面に接触している。従って、条件(2)を満たしている。
【0025】
本発明の配管検査装置の動作を説明する。本例の配管検査装置を操作するには、先ず、検査対象の配管の設計データ、又は、CADデータを入手する必要である。次に、操作者は、配管検査装置の移動経路を予め設定する。即ち、配管網上の始点と終点を設定し、次に、始点と終点の間の配管網に含まれる曲がり管の曲がり方向と分岐管の分岐の進行方向を予め検出する。こうして、経路に関する情報が得られると、配管検査装置を、始点にて、即ち、配管の入り口より内部に挿入する。駆動ユニットの駆動部を駆動させることにより、配管検査装置は、配管内を自走する。
【0026】
配管検査装置が配管内に進入したら、最も先頭の駆動部の位置をリアルタイムにて検出する必要がある。最も先頭の駆動部の位置を検出するには、配管内に進入した配管検査装置の長さを求めればよい。これは、配管の入り口にて、配管内に挿入された駆動ユニットと検査ユニットの数より求められる。駆動ユニットと検査ユニットの長さは、それぞれ既知である。尚、ここで、駆動ユニットの長さは、配管内においてジグザグ状又は螺旋状に屈折した駆動ユニットを、配管の中心線に沿って測定した長さである。駆動ユニットの長さに個数を乗算することにより、駆動ユニットの長さの合計が得られる。検査ユニットの長さに個数を乗算することにより、検査ユニットの長さの合計が得られる。両者の合計の和が、配管内に挿入された配管検査装置の長さである。尚、配管内に進入した配管検査装置の長さを測定するために、長さ測定用の特別のケーブルを使用してもよい。
【0027】
こうして、配管内に挿入された配管検査装置の長さが求められれば、それと配管の設計データから、配管検査装置の最も先頭の駆動部の位置が得られる。
【0028】
配管検査装置の先頭の駆動部が、配管の曲がり部又は分岐に近づいたら、先頭の駆動部の車軸の方向を検出する必要がある。本例の配管検査装置によると、先頭の駆動部には、車軸の方向を検出するための姿勢検出センサが設けられている。姿勢検出センサは、例えば、加速度計であってよい。姿勢検出センサによって検出された先頭の駆動部の車軸の方向は、リアルタイムにて、操作者に送信される。例えば、先頭の駆動部の姿勢検出センサに接続された信号ケーブルは、配管検査装置に沿って、配管の入り口まで延びている。操作者は、この信号ケーブルを介して、姿勢検出センサの出力を得ることができる。姿勢検出センサは、各駆動ユニットの先端の駆動部に設けられる。従って、各駆動ユニットの先端の駆動部の位置がリアルタイムにて得られる。
【0029】
操作者は、配管検査装置の先頭の駆動部が、配管の曲がり部に近づいたとき、上述の第1の条件が満たされているか否かを判定する。操作者は、配管検査装置の先頭の駆動部が、配管の分岐に近づいたとき、上述の第1及び第2の条件が満たされているか否かを判定する。先頭の駆動部には、配管の内部を撮像する撮像装置、例えば、CCDカメラが設けられてよい。第1の条件が満たされていない場合には、先頭の駆動部の車軸が、配管の中心線を含む平面に垂直となるように、先頭の駆動部を回転させる必要がある。先頭の駆動部を回転させるには、先頭の駆動部を螺旋状に進行させればよい。先頭の駆動部を螺旋状に進行させるには、2つの操縦用ケーブル17A、17Bを互いに異なる張力によって引っ張ればよい。
【0030】
第2の条件が満たされていない場合には、先頭の駆動部の車軸が、進行すべき方向の配管の内周側の内壁に接触するように、先頭の駆動部の車軸の方向を回転させる必要がある。先頭の駆動部の車軸の方向を回転させるには、先頭の駆動部を螺旋状に進行させればよい。先頭の駆動部を螺旋状に進行させるには、2つの操縦用ケーブル17A、17Bを互いに異なる張力によって引っ張ればよい。こうして、2つの操縦用ケーブル17A、17Bを互いに異なる張力によって引っ張ることにより、上述の2つの条件を満たすことができる。操作者は、配管の曲がり部の直前にて、先頭の駆動部の姿勢検出センサからの信号出力より、第1の条件が満たされているか否かを確認することができる。操作者は、配管の分岐の直前にて、先頭の駆動部の姿勢検出センサからの信号出力より、第1及び第2の条件が満たされているか否かを確認することができる。
【0031】
図2は駆動ユニットの例を示す。本例の駆動ユニットは、複数の駆動部10A〜10Eと複数の連結部13A〜13Dと張力調節部20を有する。駆動部と連結部を2本の操縦用ケーブル17A、17Bが貫通している。駆動ユニットの先端と後端には、コネクタ4が接続されている。2本の操縦用ケーブル17A、17Bは、先頭の駆動部から後尾の駆動部まで貫通しており、その後端は、張力調節部20に接続されている。2本の操縦用ケーブル17A、17Bには、バネ18A、18Bが設けられている。これらのバネ 18A、18Bは、それぞれチューブワイヤの内部に格納されている。そのため2本のバネ18A、18Bの引っ張り力によって、コネクタ4の間の駆動ユニットの長さは変えずに2本の操縦用ケーブル17A、17Bに張力を生成できるようになっている。
【0032】
張力調節部20は、操縦用ケーブル17A、17Bを巻き取るためのリール21と車輪22を有する。リール21は図示しないモータによって回転する。リール21によって2本の操縦用ケーブル17A、17Bをそれぞれ逆向きに巻き取ることができる。このリール21の回転で、2本の操縦用ケーブルの張力のバランスを変えることができる。上述のように、先頭の駆動部を螺旋状に進行させるには、2つの操縦用ケーブル17A、17Bを互いに異なる張力になるように一方向に回転させればよい。駆動部を直線状に進行させる場合には、2つの操縦用ケーブル17A、17Bを互いに同一の張力になるようにリール21の回転角度を調整すればよい。
【0033】
操縦用ケーブル17A、17Bを別々のリールで引っ張る機構によってもよい。この場合は、リール駆動機構が2倍必要であり、また配管移動中に常にケーブルを牽引し続ける必要があり、エネルギを常時必要とする。しかしながら、この場合、操縦用ケーブル17A、17Bの張力のバランスのみならず、張力自体が可変となるため、配管内の移動状況に応じて、あるいは、配管から引き出す場合などに、各車輪の配管内壁に接触させる接触力を調整できるという効果を生成する。
【0034】
さらに、操縦用ケーブル17A、17Bを別々のリールで引っ張る機構と同様の効果を、操縦用ケーブル17A、17Bを巻き取るためのリール21と車輪22をコネクタ4の間の駆動ユニットの長さ方向に移動して操縦用ケーブル17A、17Bの張力を同時に変える駆動系を導入することで実現することもできる。
【0035】
図3A、図3B及び図3Cを参照して、駆動ユニットの構造の例を説明する。図3Aは駆動ユニットの一部を示す斜視図であり、図3Bは駆動ユニットの一部の側面構成を示す図であり、図3Cは駆動ユニットの一部の平面構成を示す図である。ここでは、3つの連結部13A、13B、13Cと第2及び第3の駆動部10B、10Cのみを示す。更に、各駆動部の構造の一部のみを示す。図3Aの第2の駆動部10Bについて説明する。車軸101には車輪が装着されているが、図示は省略されている。車軸101には、アーム105、106が枢動可能に装着されている。一方のアーム105は後側の連結部13Bに装着されている。他方のアーム106は、連結軸15を介して、前側の連結部13Aに接続されている。
【0036】
車軸101の中心軸線は、後側の連結部13Bの中心軸線に直交している。連結軸15の中心軸線は、前側の連結部13Aの中心軸線に直交している。車軸101の中心軸線は、連結軸15の中心軸線に垂直である。車軸101と連結軸15によってジンバル構造が形成される。このジンバル構造によって、2つの連結部13A、13Bは、車軸101の中心軸線周りに互いに他に対して枢動可能であり、連結部13Aと駆動部10Bは、連結軸15の中心軸線周りに互いに他に対して枢動可能である。
【0037】
2本の操縦用ケーブル17A、17Bが、駆動部10B、10Cと連結部13A〜13Cを貫通している。連結部13A〜13Cには、2本の操縦用ケーブル17A、17Bが通るための孔が形成されている。2本の操縦用ケーブル17A、17Bは連結部13A〜13Cに設けられた孔によって拘束される。従って、連結部13A〜13C内における2本の操縦用ケーブル17A、17Bの位置及び経路は一定である。
【0038】
本例では、2本の操縦用ケーブル17A、17Bは引っ張られていない。従って、連結部13A〜13Cは1直線に沿って配置されている。配管検査装置を実際に配管内にて移動させる場合には、必ず、2本の操縦用ケーブル17A、17Bは引っ張られる。図3A、図3B及び図3Cに示す配管検査装置は、未だ、配管内に挿入されていない状態を示す。
【0039】
図3Bに示すように、駆動部の車軸101に垂直な面を想定し、この面に2本の操縦用ケーブル17A、17Bを投影すると、両者は重なり合っている。2本の操縦用ケーブル17A、17Bの投影線は、連結部では、その対角線に沿って走行しており、駆動部では、互い違いに、駆動部の片方側を通っている。図3Cに示すように、連結軸15に垂直な面を想定し、この面に2本の操縦用ケーブル17A、17Bを投影すると、両者は連結部では、平行に走行し、駆動部では交差している。
【0040】
図4A、図4B及び図4Cを参照して、駆動ユニットの動作を説明する。本例では、2本の操縦用ケーブル17A、17Bは同一の張力によって引っ張られている。従って、図4Bに示すように、駆動部の車軸101に垂直な面に2本の操縦用ケーブル17A、17Bを投影すると、2本の操縦用ケーブルの投影線は、図3Bの場合と比較して、直線化している。即ち、2本の操縦用ケーブル17A、17Bを同一の張力によって引っ張ることによって、連結部13A〜13Cは、車軸101の中心軸線周りに互いに枢動する。その結果、図4Bに示すように、駆動部10B、10Cと連結部13A〜13Cは、ジグザグ状に屈折する。図4Cに示すように、駆動部10B、10Cと連結部13A〜13Cは、連結軸15の中心軸線周り枢動していない。本例では、駆動部の車輪が回転すると、車輪が配管の内壁に接触した状態で、駆動部は、配管の内壁に沿って直線的に移動する。
【0041】
図5A、図5B及び図5Cを参照して、駆動ユニットの動作を説明する。本例では、2本の操縦用ケーブル17A、17Bは互いに異なる張力によって引っ張られている。図5Bに示すように、駆動部の車軸101周りに、2つの連結部は互いに枢動しており、更に、図5Cに示すように、連結軸15周りに駆動部と連結部は互いに枢動している。従って、配管検査装置は、ジグザグ状に屈折し且つ螺旋状に配列されている。本例では、駆動部の車輪が回転すると、車輪が配管の内壁に接触した状態で、駆動部は、配管の内壁に沿って螺旋状に移動する。
【0042】
図6A、図6B及び図6Cを参照して、本例の配管検査装置が分岐を移動する場合を説明する。配管5から分岐52において分岐管6が接続されているものとする。本例では、分岐52の直前において、配管検査装置の先頭の駆動部10Aの車軸101は、配管の中心線を含む平面に垂直に配置されていない。従って、上述の条件(1)を満たしていない。従って、このままでは、配管検査装置は、配管5から分岐52を経由して分岐管6に移動することはない。図6B及び図6Cに示すように、配管検査装置は、分岐52を通過して配管5を走行し続ける。
【0043】
図7A、図7B及び図7Cを参照して、本例の配管検査装置が分岐を移動する場合を説明する。本例では、分岐52の直前において、配管検査装置の先頭の駆動部10Aの車軸101は、配管の中心線を含む平面に垂直に配置されている。従って、上述の条件(1)を満たしている。更に、先頭の駆動部10Aの車輪は、分岐において、進行すべき方向の配管の内周側の壁52Aの内面に接触している。従って、上述の条件(2)を満たしている。従って、配管検査装置は、配管5から分岐52を経由して分岐管6に移動することができる。図7B及び図7Cに示すように、配管検査装置は、分岐52を通過して分岐管6に進路を変更することができる。
【0044】
図8を参照して、駆動部と連結部の構造の例を説明する。駆動部10Bは、車軸101と、車軸の両端に装着された半球面状の車輪103と、車軸101に装着された第1の傘歯車107とを有する。車軸101には、玉軸受け110A、110Bを介して第1のアーム105が装着されている。従って、第1のアーム105は、玉軸受け110A、110Bを介して車軸101の周りを自在に回転することができる。第1のアーム105には、玉軸受け111A、111Bを介して、第2のアーム106が装着されている。従って、第2のアーム106は、玉軸受け111A、111Bを介して第1のアーム105に対して自在に枢動することができる。こうして、第1のアーム105と第2のアーム106は、車軸101の中心軸線周りに、互いに他に対して枢動可能である。
【0045】
後側の連結部13Bにはモータ131が装着されている。モータ131の軸には、第2の傘歯車108が装着されている。第2の傘歯車108は第1の傘歯車107に噛み合っている。更に、モータ131には、第1のアーム105が装着されている。尚、モータ131の代わりに後側の連結部13Bに、第1のアーム105が装着されてもよい。上述のように、第1のアーム105は車軸101の中心軸線周りに、枢動可能である。従って、第1のアーム105に接続されたモータ131、及びモータ131を支持する連結部13Bは、車軸101の中心軸線周りに、枢動可能である。
【0046】
第2のアーム106は、連結軸15を介して前側の連結部13Aに枢動可能に接続されている。上述のように、第2のアーム106は車軸101の中心軸線周りに、枢動可能である。従って、第2のアーム106に接続された前側の連結部13Aは、車軸101の中心軸線周りに、枢動可能である。
【0047】
車軸101と連結軸15は直交している。車軸101と連結軸15によってジンバル構造が構成される。また、車軸101とモータ131の軸は直交している。
【0048】
モータ131が駆動すると、その軸に装着された第2の傘歯車108が回転する。第2の傘歯車108の回転は、第1の傘歯車107に伝達され、車軸101が回転する。車軸101が回転すると、車輪103が回転する。
【0049】
2本の操縦用ケーブルの張力を調節することにより、連結部13A、13Bは車軸101周りに枢動する。更に、連結部13Bは連結軸15周りに枢動する。それによって、配管検査装置の駆動ユニットがジグザグ状に屈折し、更に、螺旋状に配列される。
【0050】
図8に示した駆動部の構造は単なる1例である。駆動部と連結部を有する駆動ユニットが、ジグザグ状に屈折し、更に、螺旋状に配列することができれば、他の構造でもよい。例えば、図8の例ではモータ131を連結部に設けたが、モータを駆動部に設けてもよい。更に、本例では、車軸101とモータ131の軸は直交しているが、車軸101とモータ131の軸を同一方向に配置するように構成してもよい。この場合には、傘歯車の代わりに平歯車列が用いられる。更に、本例では、車輪103を半球状に形成しているが、タイヤ状であってもよい。車輪は、金属製であってもよいが、ゴム製であってよい。
【0051】
以上本発明の例を説明したが本発明は上述の例に限定されるものではなく、特許請求の範囲に記載された発明の範囲にて様々な変更が可能であることは、当業者によって容易に理解されよう。
【符号の説明】
【0052】
1A、1B…駆動ユニット、3…検査ユニット、4…コネクタ、5…配管、5A、5B…配管の壁、6…分岐管、10A〜10E…駆動部、13A〜13D…連結部、20…張力調節部、17A、17B…操縦用ケーブル、18A、18B…バネ、21…リール、22…車輪、15…連結軸、30…検査素子、31、32…ケーブル、51…曲がり部、52…分岐、101…車軸、103…車輪、105,106…アーム、107,108…傘歯車、131…モータ
【特許請求の範囲】
【請求項1】
少なくとも1個の駆動ユニットと少なくとも1個の検査ユニットとを有し、検査対象の配管内に挿入可能な配管検査装置において、
前記駆動ユニットは、複数の駆動部と、該駆動部を連結する複数の連結部と、前記駆動部及び前記連結部を通る2本の操縦用ケーブルと、該操縦用ケーブルの張力を調節する張力調節部とを有し、前記駆動部はモータによって回転可能な車軸と、該車軸に装着された車輪とを有し、
前記2本の操縦用ケーブルを互いに同一の張力によって引っ張ることによって、前記駆動ユニットはジグザグ状に屈折し、前記駆動部の車輪が前記配管の内壁に接触した状態で、前記駆動ユニットは直進し、
前記2本の操縦用ケーブルを互いに異なる張力によって引っ張ることによって、前記駆動ユニットはジグザグ状に屈折し且つ螺旋状に配列し、前記駆動部の車輪が前記配管の内壁に接触した状態で、前記駆動ユニットは螺旋状に進むように構成されている配管検査装置。
【請求項2】
請求項1記載の配管検査装置において、
前記駆動部と前記連結部は互いに直交する2つの枢動軸を有するジンバル構造によって接続されており、前記駆動部及び前記連結部が前記2つの枢動軸周りに枢動することによって、前記駆動ユニットはジグザグ状に屈折し且つ直線状又は螺旋状に配列することができるように構成されていることを特徴とする配管検査装置。
【請求項3】
請求項1記載の配管検査装置において、
前記駆動ユニットは、2つの連結部と該2つの連結部の間に設けられた中間の駆動部を含み、
前記2つの連結部は前記中間の駆動部の車軸の周りに枢動可能であり、前記2つの連結部の一方の連結部は前記中間の駆動部に対して、前記車軸に対して直交するように配置された連結軸の周りに枢動可能であり、前記中間の駆動部の車軸と前記連結軸によって、前記2つの連結部は前記中間の駆動部を介して屈折することができるように構成されている配管検査装置。
【請求項4】
請求項1記載の配管検査装置において、
前記駆動部と前記連結部は、2つの連結部と該2つの連結部の間に設けられた中間の駆動部を含み、
前記中間の駆動部は、車軸の周りに枢動可能な第1及び第2のアームを有し、前記第1のアームは前記2つの連結部の一方の連結部に装着され、前記第2のアームは、前記車軸に対して直交するように配置された連結軸を介して前記2つの連結部の他方の連結部に接続され、前記2つの連結部は、前記中間の駆動部の車軸の周りに互いに他に対して枢動可能であり、該駆動部と前記他方の連結部は、前記連結軸の周りに枢動可能であることを特徴とする配管検査装置。
【請求項5】
請求項1記載の配管検査装置において、
前記駆動部は、モータと、前記車軸に装着された第1の傘歯車と、前記モータの軸に装着され前記第1の傘歯車と噛み合う第2の傘歯車と、前記車軸に第1の玉軸受けを介して装着された第1のアームと、該第1のアームに第2の玉軸受けを介して装着された第2のアームと、を有し、
該第2のアームには、前記車軸に直交する連結軸を介して前側の連結部が枢動可能に接続されており、前記第1のアームには、前記モータが支持されていることを特徴とする配管検査装置。
【請求項6】
請求項1記載の配管検査装置において、
前記張力調節部は、前記の2本の操縦用ケーブルを引っ張るバネと、それぞれのバネの他端を牽引するリールを有することを特徴とする配管検査装置。
【請求項7】
請求項1記載の配管検査装置において、
前記張力調節部は、前記の2本の操縦用ケーブルを引っ張るバネと、それぞれのバネの他端を逆向きに巻きつけて固定した一つのリールとを有することを特徴とする配管検査装置。
【請求項8】
請求項1記載の配管検査装置において、
前記2本の操縦用ケーブルは、前記連結部では、その対角線に沿って平行に走行しており、前記駆動部では、互い違いに、前記駆動部の片方側を通っており、且つ、交差して走行していることを特徴とする配管検査装置。
【請求項9】
請求項1記載の配管検査装置において、
前記駆動ユニットの先頭の駆動部には、車軸の方向を検出するための姿勢センサが設けられていることを特徴とする配管検査装置。
【請求項1】
少なくとも1個の駆動ユニットと少なくとも1個の検査ユニットとを有し、検査対象の配管内に挿入可能な配管検査装置において、
前記駆動ユニットは、複数の駆動部と、該駆動部を連結する複数の連結部と、前記駆動部及び前記連結部を通る2本の操縦用ケーブルと、該操縦用ケーブルの張力を調節する張力調節部とを有し、前記駆動部はモータによって回転可能な車軸と、該車軸に装着された車輪とを有し、
前記2本の操縦用ケーブルを互いに同一の張力によって引っ張ることによって、前記駆動ユニットはジグザグ状に屈折し、前記駆動部の車輪が前記配管の内壁に接触した状態で、前記駆動ユニットは直進し、
前記2本の操縦用ケーブルを互いに異なる張力によって引っ張ることによって、前記駆動ユニットはジグザグ状に屈折し且つ螺旋状に配列し、前記駆動部の車輪が前記配管の内壁に接触した状態で、前記駆動ユニットは螺旋状に進むように構成されている配管検査装置。
【請求項2】
請求項1記載の配管検査装置において、
前記駆動部と前記連結部は互いに直交する2つの枢動軸を有するジンバル構造によって接続されており、前記駆動部及び前記連結部が前記2つの枢動軸周りに枢動することによって、前記駆動ユニットはジグザグ状に屈折し且つ直線状又は螺旋状に配列することができるように構成されていることを特徴とする配管検査装置。
【請求項3】
請求項1記載の配管検査装置において、
前記駆動ユニットは、2つの連結部と該2つの連結部の間に設けられた中間の駆動部を含み、
前記2つの連結部は前記中間の駆動部の車軸の周りに枢動可能であり、前記2つの連結部の一方の連結部は前記中間の駆動部に対して、前記車軸に対して直交するように配置された連結軸の周りに枢動可能であり、前記中間の駆動部の車軸と前記連結軸によって、前記2つの連結部は前記中間の駆動部を介して屈折することができるように構成されている配管検査装置。
【請求項4】
請求項1記載の配管検査装置において、
前記駆動部と前記連結部は、2つの連結部と該2つの連結部の間に設けられた中間の駆動部を含み、
前記中間の駆動部は、車軸の周りに枢動可能な第1及び第2のアームを有し、前記第1のアームは前記2つの連結部の一方の連結部に装着され、前記第2のアームは、前記車軸に対して直交するように配置された連結軸を介して前記2つの連結部の他方の連結部に接続され、前記2つの連結部は、前記中間の駆動部の車軸の周りに互いに他に対して枢動可能であり、該駆動部と前記他方の連結部は、前記連結軸の周りに枢動可能であることを特徴とする配管検査装置。
【請求項5】
請求項1記載の配管検査装置において、
前記駆動部は、モータと、前記車軸に装着された第1の傘歯車と、前記モータの軸に装着され前記第1の傘歯車と噛み合う第2の傘歯車と、前記車軸に第1の玉軸受けを介して装着された第1のアームと、該第1のアームに第2の玉軸受けを介して装着された第2のアームと、を有し、
該第2のアームには、前記車軸に直交する連結軸を介して前側の連結部が枢動可能に接続されており、前記第1のアームには、前記モータが支持されていることを特徴とする配管検査装置。
【請求項6】
請求項1記載の配管検査装置において、
前記張力調節部は、前記の2本の操縦用ケーブルを引っ張るバネと、それぞれのバネの他端を牽引するリールを有することを特徴とする配管検査装置。
【請求項7】
請求項1記載の配管検査装置において、
前記張力調節部は、前記の2本の操縦用ケーブルを引っ張るバネと、それぞれのバネの他端を逆向きに巻きつけて固定した一つのリールとを有することを特徴とする配管検査装置。
【請求項8】
請求項1記載の配管検査装置において、
前記2本の操縦用ケーブルは、前記連結部では、その対角線に沿って平行に走行しており、前記駆動部では、互い違いに、前記駆動部の片方側を通っており、且つ、交差して走行していることを特徴とする配管検査装置。
【請求項9】
請求項1記載の配管検査装置において、
前記駆動ユニットの先頭の駆動部には、車軸の方向を検出するための姿勢センサが設けられていることを特徴とする配管検査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−76475(P2012−76475A)
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願番号】特願2010−220581(P2010−220581)
【出願日】平成22年9月30日(2010.9.30)
【特許番号】特許第4677595号(P4677595)
【特許公報発行日】平成23年4月27日(2011.4.27)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願日】平成22年9月30日(2010.9.30)
【特許番号】特許第4677595号(P4677595)
【特許公報発行日】平成23年4月27日(2011.4.27)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]