
重合プロセスでの制御方法
重合プロセス中の二相流内を流れる成長ポリマー粒子の速度を監視する方法であって、
光度計により前記二相流内での光伝搬の減衰度を測定することからなり、
前記光度計は、1つ以上の光源を前記二相流に連結する1つ以上の送信光導波路と、前記二相流を光検出器に連結する1つ以上の受信光導波路とを備える方法。
光度計により前記二相流内での光伝搬の減衰度を測定することからなり、
前記光度計は、1つ以上の光源を前記二相流に連結する1つ以上の送信光導波路と、前記二相流を光検出器に連結する1つ以上の受信光導波路とを備える方法。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、プロセス中のポリマー粒子の流れを監視することによって、安全かつ再現可能に重合プロセスを行なうための方法に関する。より具体的には、本発明は、光度計によりオレフィンの重合プロセスでのポリマー粒子の速度を監視する方法に関する。
【背景技術】
【0002】
液体又は気体媒体中を流れる固体粒子の速度の測定は、多くの工業プロセス、例えば化学物質の生産や重合プロセスにおいて極めて重要であることが知られている。
【0003】
液体−固体混合物又は気体−固体混合物は、いくつかの特性、例えば密度、電気伝導度及び光入射作用における不連続性によって特徴づけられる。上記特性での差異を利用することによって、気体又は液体の流れに同伴された固体粒子の流速を測定するために多くの装置が開発されてきた。
【0004】
特に、例えば垂直パイプでは、固体及び気体からなる二相混合物の全密度を決定するために、パイプの2つのセクション間の差圧を測定することによって前記速度を評価することが可能である。共通の気体流量計によって測定された気体の流速値から出発して、実験式(Perry, R.H., and Green, D.W. :Perry' Chemical Engineers' Handbook, 6th ed., McGraw Hill, 1984, pag.5-47を参照)により気体速度に対する固体粒子の相対速度を得ることは可能であり、不確かさは、前記実験式の使用に関連しており、固体濃度の増大とともに不確かさが大きくなることは言うまでもない。
【0005】
Auburn International Inc.によって提供された別のシステムは、非導電性液体又は固体がパイプ内を流れるときに、摩擦電気効果として知られている摩擦帯電によって生成される少量の電荷を測定する。異種材料間の摩擦接触中に形成されるこれらの電荷は,電荷が分散可能でないならば、つまり、パイプが接地されていないならば、通常、静電気の蓄積に繋がるものである。この装置は、ライン内に挿入され、かつ絶縁材料で作られたセンサーパイプからなり、そのラインの存在する内径に適合する。2つの受感(sensitive)リング電極は、ある距離を開けて、センサーパイプの外側の周りに配置される。液体又は固体に蓄積された電荷が電極を通過すると、小さいが測定可能な電流が静電結合により誘起される。この誘起電流は、増幅され、各センサからの波形としてデジタル化される。リング電極が離れ過ぎていなければ、流れの中での摩擦電気電荷の分布は、第1電極から第2電極へ流れる間に大きくは変化しない。従って、各センサで測定された波形は、形状が類似している。しかし、これらの波形は、第1電極から第2電極へ移動するのに必要な時間により、時間がシフトする。固体速度は、既知のリングセンサ間距離を、測定された時間遅延で割ることによって得られる。残念ながら、このシステムは、径の小さなパイプにのみ適合可能であり、それ故に、径の大きなパイプ又は反応器に対しては全く役に立たない。
【0006】
種々の機器によって利用される物理的原理とは違って、商業的に入手可能なシステムの大部分は、パイプの壁にある横方向開口を通じてサンプリングすることを含む。センサの機械部品とサンプリングされる生産物との間の相互作用は、流れの条件において、受け入れがたい乱れを生じうる。
【0007】
さらに、重合プロセスのように、固体粒子が反応系に属するとき、反応条件のいかなる変化をも避けることが重要である。上述の理由により、侵襲的な装置は、重合条件に干渉するときには、速度測定の実行には適さない。
【0008】
従来知られている他の方法は、重合プロセスでの使用には適していない。例えば、システム中での固体の循環を測定するためにポリマー流へ放射性粒子を添加することは、実現できそうにない。なぜなら、放射性粒子は、放出されるポリマーと一緒に必然的に取り除かれるからである。さらに、反応媒体中に放射性粒子が存在することは、密度測定を行なうために重合プロセスにおいて一般に使用されるγ線機器によって実行される測定の邪魔になるであろう。
【0009】
また、光ファイバ光学系を含む、電磁波と固体との間の相互作用に基づく光学系は、いくつかの工業プロセスにおいて既に使用可能である。分散系での光伝播の減衰度に基づく光度計が説明されてきた。
【0010】
例えば、DE-A-38 33 899は、遠隔測定のための分光光度計を開示する。測定光ユニットと残留光処理ユニットとの間の光導波路がウインドウによってサンプルに連結され、駆動可能なフィルタホイール(filter wheel)が、測定光源として働くフラッシュランプと、ビームスプリッタの間に配置される。これは、参照の測定と信号の測定の正確さがパルシング(pulsing)によって改善されるという点において、通常の光度計よりも改善されている。しかし、パルスシステム(pulsed system)の使用は、連続的なプロセス制御が要求されるときに不利である。さらに、この光度計は、高濃度の系では使用できない。
【0011】
また、US 4,752,131で説明されているレーザ−光学配置は、分散度を決定するために分散及び懸濁している個々の粒子を解析するために同様の構造を有しており、前記したものと同じ不利点を示す。
【0012】
従来の方法及び装置は、重合プロセスに含まれる厳しい圧力及び温度条件で径の大きなパイプ及び/又は反応器に適用すると、高精度速度測定ができない。
【0013】
EP 472 899には、分散系での光伝播の減衰度を測定するための光度計が開示されている。前記光度計は、懸濁液の色、又はその中に分散されている固体粒子のサイズ、又はその固体の濃度を決定するのに使用することが提案されている。気体又は液体媒体中を流れる固体粒子の速度を測定するために前記光度計を使用することは、EP 472 899には記載されていない。
【0014】
厳しい圧力及び温度条件において機能し、重合プロセスにおけるポリマー粒子速度を効率的かつ正確な測定が可能な非侵襲的測定機器を提供することは望ましいであろう。
【0015】
高温及び高圧が要求される重合プロセスにおいて動作させるときに、特定の光度計を使用することによって非常に正確な固体粒子の速度測定を連続的に行なうことができることが予想外に見出された。
【課題を解決するための手段及び発明の効果】
【0016】
従って、これが、本発明、重合プロセス中の二相流内を流れる成長ポリマー粒子の速度を監視する方法であって、光度計により前記二相流内での光伝搬の減衰度を測定することからなり、前記光度計は、1つ以上の光源を前記二相流に連結する1つ以上の送信光導波路と、前記二相流を光検出器に連結する1つ以上の受信光導波路とを備える方法、の目的である。
【0017】
本発明による方法は、二相流内を流れる固体粒子の速度の監視に適し、従って、重合プロセス中の固体循環制御に有利に適用することができる。
【0018】
重合プロセスでは、反応媒体が存在している反応ゾーンに、触媒粒子とモノマーが一緒に供給される。大部分のプロセスでは、重合が進むと、ポリマー粒子を含む二相流が形成される。重合が気相又は液相のどちらで実行されるかに従って、前記二相流は、気体/固体流又は液体/固体流になることができ、1つ以上のモノマーと接触して成長する固体ポリマー粒子を含む。
【0019】
本発明の方法は、好ましくは、前記二相流中でのポリマー濃度が容量で5〜70%であり、ポリマー粒子の流れが実質的に一方向に沿っている何れの重合プロセスにも適用される。例えば、ループ状反応器又は管状反応器において実行される気相又は液相重合は、本発明の範囲内である。
【0020】
本発明の制御方法は、EP 472 899で説明されている光度計を、パイプ又は反応器内を流れるポリマー粒子の速度測定に適用して、利用する。
【0021】
前記光度計の作用は、気体又は液体媒体を流れるポリマー粒子の特性の関数として、光源から検出器に到達する光の強度を測定することに基づいている。光源、光検出器及び二相流の配置に応じて、流れ特性について測定された信号には、種々の依存関係がある。その理由は、光の伝播又は減衰は、二相流の流動化条件の、さらに一般的には、散乱及び吸収特性の関数である。二相流の光学特性は、プロセス制御の基礎となるポリマー流に依存するという結論になる。
【0022】
本発明で使用される光度計は、EP 472 899で説明されているように、3種類の測定配置(送信、擬似後方散乱、レミッション(remission)モード)に従って機能する。
【0023】
送信モードでは、二相流を通じて送信された光が測定される。擬似後方散乱モードでは、分散媒体中の光の拡散伝播の結果として入射方向に後方散乱されるが別のファイバに入る光が測定される。
【0024】
レミッションモードでは、光導波路を終端させる透明な平坦要素の媒体側境界面で拡散されて反射される光であって、一般に、その境界面自体の反射光ではないものが、測定される。
【0025】
光導波路連結の擬似後方散乱配置は、重合中のポリマー粒子の速度の正確かつ連続的制御であり、本発明の目的を達成するのに有利であることが見出された。
【0026】
光度計は、壁に光度計を取り付ける重合反応器のどの位置にも都合よく配置することができる。光導波路連結の、1つ以上の送信光導波路と1つ以上の受信光導波路は、重合反応器の壁に擬似後方散乱配置で配置される。
【0027】
重合中のプロセス制御での正確な結果は、重合条件への干渉をできるだけ避けることによって得られる。これは、反応器の内部に顕著に突き出さないように送信及び受信光導波路の端を配置することによって達成される。好ましくは、送信及び受信光導波路の反応器側の端は、反応器の壁に対して同一平面に配置される。光源から来る光は、送信光導波路を介してポリマー粒子を含む二相流に到達し、ポリマーによって入射方向に後方散乱され、受信光導波路に入る。光導波路連結の技術で知られているように、各送信光導波路は、1つ以上の送信ファイバを含むことができ、各受信光導波路は、1つ以上の受信ファイバを含むことができる。
【0028】
好ましい実施形態によると、前記送信及び受信光導波路の反応器側の端は、ペアになって、互いに並んで配置される。送信及び受信光導波路の第1及び第2ペアは、ポリマー流の方向に適切な距離を開けて配置される。つまり、前記実施形態では、光度計は、光源を反応器の壁に連結する2つの送信光導波路と、反応器の壁を光検出器に連結する2つの受信光導波路を備える。2つの受信光導波路の反応器側の端と同様に、2つの送信光導波路の反応器側の端も、ポリマー粒子の流れに沿って、10mm未満の距離、好ましくは0.2〜6mmの距離を開けて配置される。
【0029】
気相重合プロセスでは、必要に応じて動作し、光導波路の端に堆積する微紛、塊(chunk)、薄板を吹き飛ばして光導波路の端をきれいにすることができる、モノマー、不活性ガス又はその混合物のフラックシング(fluxing)を配置することが有利であることがある。前記フラックシングは、光導波路の端に近接して、好ましくは前記端の接線方向に配置される。
【0030】
重合反応器内を走るポリマー粒子の速度を監視するために使用されるとき、本発明の方法は、厳しい温度及び圧力及びポリマー濃度条件下で重合が行なわれるとしても、ポリマー速度の高精度評価を行なう。体積で30〜70%の範囲のポリマー濃度でさえ、本発明の方法は、再現可能な優れた結果を与えることができる。
【0031】
例えば、重合が2つの相互接続された重合ゾーンで実行される、EP 0 782 587及びEP 1 012 195に開示された気相プロセスでは、重合条件は厳しいものになる。ここで、気相プロセスにおいて1つ以上のα−オレフィンの重合を非限定的に参照して、本発明の方法を説明する。この方法では、前記成長ポリマー粒子は、高速流動化条件下の第1重合ゾーンを通じて上方に流れ、第1重合ゾーンを離れ、第2重合ゾーンに入って、そこで重力作用下で密度が高められた状態で流れ、第2重合ゾーンを離れ、第1重合ゾーンに再導入され、このように、2つの重合ゾーン間でのポリマーの循環を起こさせる。
【0032】
第2重合ゾーンでの動作条件は、従来の速度測定機器には特に厳しい。温度は50℃〜120℃、圧力は1.5MPa〜6MPa、ポリマー濃度(反応器の単位m3当たりのポリマーのm3)は、体積で30〜60%程度である。ポリマーが重力の作用下で密度が高められた状態で流れるので、前記濃度は特に高い。
【0033】
固体粒子の濃度が高いので、隣接する粒子間の相対運動は事実上存在せず、均一な下向きの固体の流れが、0.1〜1m/s程度の速度で第2重合ゾーンを通過する。
【0034】
例えばγ線機器による密度測定と共に行なわれる速度測定は、重合プロセス、特にEP 0 782 587及びEP 1 012 195で説明されている重合プロセスではでは非常に重要なパラメータであるポリマーの質量流量、すなわち循環速度の直接かつ高精度な測定を行なう。ポリマー粒子の速度は、ポリマーが上述の2つの異なる重合ゾーンを通過する平均回数(サイクル)に影響を与える。その結果、得られたポリマーの例えば均一性、分子量分布、コポリマー組成分布のようないくつかの特性は、反応器内を流れる前記ポリマー粒子の速度を調節することによって制御可能である。目標は、所望の品質の生産物を得るために、前記速度を制御下に保つことである。
【0035】
循環速度は、2モードのホモポリマー又はコポリマーを生産するとき、つまり、組成が異なる2つの重合ゾーンが反応器内に設けられるとき、特に重要である。EP 1 012 195で説明されているように、第2重合ゾーンの上部に気体又は液体混合物を供給することによって、組成が異なる2つの重合ゾーンを反応器内で得ることは可能である。前記混合物は、第1重合ゾーンから来るガスへのバリアとして機能する。ポリマー循環速度のいかなる変動も、前記バリアの効率に影響を与える。実際に、循環速度が大きくなるほど、第1重合ゾーンから来る気体(gas)が高く(high)なり、その結果、第2重合ゾーンの上部に供給される気体又は液体混合物の流速が大きくなる。
【0036】
また、1モードの生産では、バリアが供給されないとき、循環速度は、重要なパラメータである。実際、ポリマーの速度は、反応器内での温度に直接影響を与える。重合は、発熱プロセスであり、従って、反応器内の熱点を避けるために熱の除去が必要である。熱点が形成されると、ポリマーの溶融が起こり、塊が形成され、壁が汚れる。これは、反応器の停止に繋がる。ポリマーが第2重合ゾーンで下降するにつれてポリマーの温度は上昇する。従って、第2重合ゾーンの下部において、この状況は特に深刻である。ポリマーの濃度が高いので、相対的に熱移動係数が低くなり、少量の気体が冷却媒体として機能する。同等の冷却のために、ポリマー粒子の速度が小さくなるほど、第2重合ゾーンでの温度を高くする。従って、固体ポリマー粒子が、プロセスによって要求される時間だけ、前記ゾーン内に滞留することが重要である。従って、ポリマー速度を制御下に保持するために、光度計は、第2重合ゾーンに配置することが有利である。好ましくは、光度計は、第2重合ゾーンの下部に配置される。
【0037】
2つの重合ゾーンの間を循環する固体ポリマー粒子の速度は、第2重合ゾーンの下部に配置された例えば漏斗形の絞りと、絞りの下流に配置される調節可能な機械弁により、都合よく制御することができる。前記機械弁の有利な例は、スロットル弁又は蝶形弁である。
【0038】
ポリマー粒子をひきずり、絞りを通じたポリマー粒子の流れを容易にするために、気体流(以下、「投与ガス」として参照する)を導入することには利点がある。好ましくは、前記投与ガスは、未反応のモノマーのリサイクルラインから取られる。第2重合ゾーンを通じたポリマー粒子の流れは、機械弁と、第2重合ゾーンの下部に、特に絞りと機械弁の直ぐ上の位置に導入される投与ガスにより調節される。投与ガスの流速と機械弁の開口が大きくなるほど、ポリマー粒子の速度が大きくなる。
【0039】
第2重合ゾーンでのポリマーの速度を監視することが重要なので、前記ポリマー速度に作用する制御系を配置することは重要である。ある実施形態では、本発明の制御方法は、閉ループ制御系であり、すなわち、制御変数が測定され、その測定の結果が1つ以上のプロセス変量の操作に使用される。特に、投与ガスの流速と機械弁の開口(プロセス変量)は、第2重合ゾーンでのポリマー粒子の速度(制御変数)を0.1〜1m/s、好ましくは0.2〜0.7m/sからなる範囲に維持するように、光度計の出力値に応答する。光度計は、ポリマー粒子の速度をオンラインで測定し、評価ユニット、例えばプログラマブルロジック制御器又はパーソナルコンピュータによって処理された出力信号をリアルタイムで返す。測定された速度値は、所望のポリマー粒子速度又は設定値と比較する。差が存在すれば、制御器は、機械弁の開口と投与ガスの流速を変化させる。さらに正確には、測定された速度が設定値以下であれば、制御器は、機械弁の開口を広げ、投与ガスの流速を大きくし、その逆も成り立つ。比例積分制御器(PI)が、この目的に便利なことがある。
【0040】
本発明の他の特徴は、添付図面を参照して与えられる以下の説明を読むことによってさらに明らかになるであろう。添付図面は、説明の目的で与えられ、本発明の範囲を限定するためのものではない。
【発明を実施するための最良の形態】
【0041】
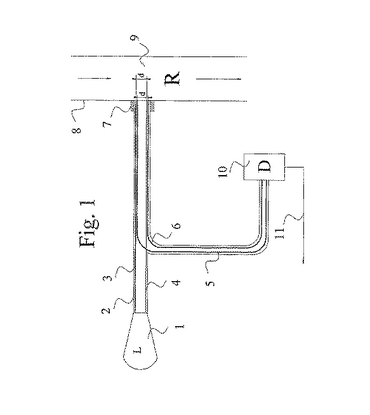
図1を参照すると、光源1は、連続光源、つまり、安定化高輝度白色光源、例えば楕円反射器を有するキセノン小型アークランプ、集光器を有するハロゲンランプ、又は安定化LEDである。束の外装2は、送信光導波路3及び4と、受信光導波路5及び6を含み、反応器9の壁8に形成されたタップ7にねじ込まれている。
【0042】
光源1が連続光ビームを放射すると、その光は、送信光導波路3及び4に沿って進み、反応器内を下向きに流れるポリマー粒子に衝突する。ポリマー粒子によって入射方向に後方散乱された光は、受信光導波路5及び6のそれぞれによって受信され、評価ユニット10に送られる。さらに正確には、送信光導波路3によって反応器の内部に送信された光は、ポリマー粒子によって後方散乱され、受信光導波路5によって受信され、評価ユニット10に送信される。同様に、送信光導波路4によって送信された光は、受信光導波路6によって受信される。
【0043】
送信光導波路3及び4、及び受信光導波路5及び6の端部は、反応器9の壁と同一平面上に配置される。
【0044】
評価ユニット10は、光信号の送信から受信までのシステム全体を管理する。特に、その光が電気信号に変換され、その電気信号がポリマー粒子の速度を指し示す出力11に変換される。実際に、受信光導波路5及び6によって運ばれる、正弦波の形で現れる2つの光信号間の強度の比較によって、評価ユニットは、位相シフトを計算する。位相シフトは、ポリマー粒子が受信光導波路5及び6の端同士の間の距離を覆うのにかかる時間に対応している。速度は、2つの対応した受信光導波路5及び6間の、ポリマー粒子の流れに沿った距離を知ることによって計算する。前記距離dは、0.2〜6mmの間で変化する。
【0045】
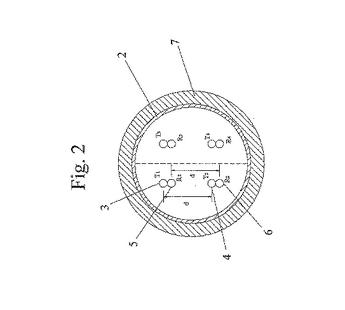
図2を参照すると、図1の光度計の送信及び受信光導波路の反応器側の端の正面図が与えられる。
【0046】
送信及び受信光導波路の反応器側の端は、互いにペアになって構成される。四対の送信及び受信光導波路が提供され、2つの独立した速度測定を行うことができる。1つはT1/R1−T2/R2の組からであり、1つはT3/R3−T4/R4の組からである。言い換えると、T3/R3−T4/R4の組は、T1/R1−T2/R2の組と重複している。
【0047】
反応器9の内部を図1の光源1に連結する、送信光導波路3及び4の反応器側の端T1及びT2は、上述の通り、距離dを開けて配置されている。図1の受信光導波路5及び6の反応器側の端R1及びR2は、同じ距離dで隔てられている。
【0048】
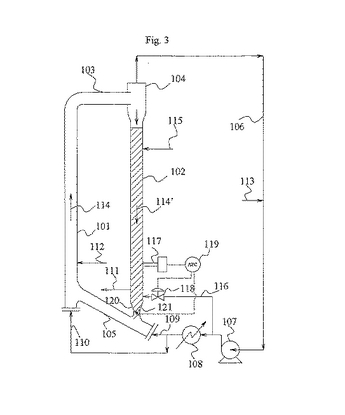
速度測定が一旦行われると、重合プロセスにおいて、それを制御変数として用いることができる。特に、図3を参照すると、光度計117は、EP 1 012 195で開示された気相プロセスでのポリマー循環速度の測定に適用される。
【0049】
成長中のポリマーは、矢印114の方向に沿って、高速流動化条件下の第1重合ゾーンを通って流れる。第2重合ゾーン102では、成長中のポリマーは、重力の作用下で、矢印114’の方向に沿って、密度が高められた状態で流れる。2つの重合ゾーン101及び102は、セクション103及び105によって相互に連結される。物質収支は、モノマー及び触媒を供給し、ポリマーを放出することによって維持される。
【0050】
一般に、第1重合ゾーン101の高速流動化条件は、ライン109を通じて供給され、セクション105から来る1つ以上の成分からなる気体混合物によって達成される。セクション105は、第2重合ゾーン102から第1重合ゾーン101へのポリマーの移送を可能にする。気体混合物の一部は、ポリマーを第1重合ゾーン101へ再導入する位置の下方に位置するライン110を通じて第1重合ゾーン101に供給することができる。
【0051】
第1重合ゾーン101に注入される輸送気体の速度は、動作条件下での輸送速度よりも大きくなければならず、気体密度と固体の粒子サイズ分布に依存する。この速度は、好ましくは0.5〜15m/s、さらに好ましくは0.8〜5m/sとなるように構成されている。
【0052】
第1重合ゾーン101を離れるポリマーと気体混合物は、固体/気体分離ゾーン104に運ばれる。固体/気体分離は、従来の分離手段、例えば慣性型分離器、遠心型分離器又はこれら2つの組合せを用いて行なうことができる。
【0053】
ポリマーは、分離ゾーン104から第2重合ゾーン102に入る。分離ゾーン104を離れる気体混合物は、圧縮され、冷却され、そしてライン109を通じて第1重合ゾーン101へ移送される。この際、適切であれば、構成モノマー及び/又は分子量調整剤及び/又は不活性気体を加える。気体混合物の移送は、圧縮手段107と、冷却手段108と、モノマー、分子量調整剤及び任意で不活性気体を供給するライン113とを備えるリサイクルライン106により行なわれる。分離ゾーン104を離れる気体混合物の一部は、圧縮及び冷却した後、ライン110を通じて第1重合ゾーン101の下部に移送することができる。第1重合ゾーン101に送る気体のほとんど全部を、ライン110を通じて導入することができる。一方、第2重合ゾーン102から来るポリマーの流れを調整し、それをセクション105を通じて輸送するのに必要な、より少ない量を、ライン109を通じて導入することができる。
【0054】
一般に、種々の触媒成分が、好ましくは第1重合ゾーン101の下部に配置されるライン112を通じて第1重合ゾーン101に供給される。ポリマーは、ライン111を通じて放出することができる。ライン111は、同伴気体の量を最小にするように、ポリマー粒子がより密集した状態で流れる第2重合ゾーン102に配置されるのが有利である。
【0055】
分離ゾーン104で循環する固体から分離された気体混合物が、第2重合ゾーン102に入るのを防止することができる。これは、第2重合ゾーン102の適切な位置に、好ましくは第2重合ゾーン102の上部に配置されたライン115を通じて第2重合ゾーン102へ気体及び/又は液体を供給することによって行なうことができる。第2重合ゾーン102に供給される気体及び/又は液体混合物は、第1重合ゾーン101で存在する気体混合物の組成とは異なった、適切な組成を有するべきである。前記気体及び/又は液体混合物は、部分的に又は完全に、降下管に入るポリマー粒子に同伴している気体混合物に取って代わる。この気体供給の流速は、ポリマー粒子の流れに対向する気体流が、第2重合ゾーン102で、好ましくは第2重合ゾーン102の上部で始まるように、調整することができる。この気体流は、第1重合ゾーン101から来る、ポリマー粒子に同伴している気体混合物に対するバリアとして働く。
【0056】
漏斗のような形の絞り120は、第2重合ゾーン120の下の方に都合よく形成することができる。機械弁121がその中に配置される。
【0057】
前に説明したように、第2重合ゾーン120の下部を通じたポリマー粒子の流れは、機械弁121の開口と、投与ガスの流速を変化させることによって都合よく調節される。前記投与ガスは、絞り120の直ぐ上方に配置されたライン116によって第2重合ゾーンの下部に供給される。ライン116を通じて導入される気体は、リサイクルライン106から、より正確には冷却手段108の上流から都合よく取り込まれる。投与ガスの流速は、ライン116に配置された、例えば蝶形弁のような機械弁である空気圧制御弁118により調節される。
【0058】
光度計117は、好ましくは、前記ライン116の上方に配置され、第2重合ゾーン102の壁に取り付けられる。その結果、光度計117は、第2重合ゾーン102内を流れるポリマー粒子の速度の評価を行なう。その評価は、デジタル信号に変換され、高度プロセス制御器(APC)119に送られる。
【0059】
速度の評価に応じて、APC119は、弁118の開口に作用し、第2重合ゾーン102に導入される投与ガスの流速を調節する。さらに、APC119は、機械弁121の開口を調節することもできる。その結果、APC119は、ポリマー粒子の速度を制御し、その速度を所望値に維持する。
【図面の簡単な説明】
【0060】
【図1】重合反応器に適用される本発明の光度計の擬似後方散乱配置を示す図式表示である。
【図2】図1の光度計の光導波路の反応器側の端の図式表示である(正面図)。
【図3】EP 1 012 195で説明されている重合プロセスに適用された本発明の制御方法の図式表示である。
【技術分野】
【0001】
本発明は、プロセス中のポリマー粒子の流れを監視することによって、安全かつ再現可能に重合プロセスを行なうための方法に関する。より具体的には、本発明は、光度計によりオレフィンの重合プロセスでのポリマー粒子の速度を監視する方法に関する。
【背景技術】
【0002】
液体又は気体媒体中を流れる固体粒子の速度の測定は、多くの工業プロセス、例えば化学物質の生産や重合プロセスにおいて極めて重要であることが知られている。
【0003】
液体−固体混合物又は気体−固体混合物は、いくつかの特性、例えば密度、電気伝導度及び光入射作用における不連続性によって特徴づけられる。上記特性での差異を利用することによって、気体又は液体の流れに同伴された固体粒子の流速を測定するために多くの装置が開発されてきた。
【0004】
特に、例えば垂直パイプでは、固体及び気体からなる二相混合物の全密度を決定するために、パイプの2つのセクション間の差圧を測定することによって前記速度を評価することが可能である。共通の気体流量計によって測定された気体の流速値から出発して、実験式(Perry, R.H., and Green, D.W. :Perry' Chemical Engineers' Handbook, 6th ed., McGraw Hill, 1984, pag.5-47を参照)により気体速度に対する固体粒子の相対速度を得ることは可能であり、不確かさは、前記実験式の使用に関連しており、固体濃度の増大とともに不確かさが大きくなることは言うまでもない。
【0005】
Auburn International Inc.によって提供された別のシステムは、非導電性液体又は固体がパイプ内を流れるときに、摩擦電気効果として知られている摩擦帯電によって生成される少量の電荷を測定する。異種材料間の摩擦接触中に形成されるこれらの電荷は,電荷が分散可能でないならば、つまり、パイプが接地されていないならば、通常、静電気の蓄積に繋がるものである。この装置は、ライン内に挿入され、かつ絶縁材料で作られたセンサーパイプからなり、そのラインの存在する内径に適合する。2つの受感(sensitive)リング電極は、ある距離を開けて、センサーパイプの外側の周りに配置される。液体又は固体に蓄積された電荷が電極を通過すると、小さいが測定可能な電流が静電結合により誘起される。この誘起電流は、増幅され、各センサからの波形としてデジタル化される。リング電極が離れ過ぎていなければ、流れの中での摩擦電気電荷の分布は、第1電極から第2電極へ流れる間に大きくは変化しない。従って、各センサで測定された波形は、形状が類似している。しかし、これらの波形は、第1電極から第2電極へ移動するのに必要な時間により、時間がシフトする。固体速度は、既知のリングセンサ間距離を、測定された時間遅延で割ることによって得られる。残念ながら、このシステムは、径の小さなパイプにのみ適合可能であり、それ故に、径の大きなパイプ又は反応器に対しては全く役に立たない。
【0006】
種々の機器によって利用される物理的原理とは違って、商業的に入手可能なシステムの大部分は、パイプの壁にある横方向開口を通じてサンプリングすることを含む。センサの機械部品とサンプリングされる生産物との間の相互作用は、流れの条件において、受け入れがたい乱れを生じうる。
【0007】
さらに、重合プロセスのように、固体粒子が反応系に属するとき、反応条件のいかなる変化をも避けることが重要である。上述の理由により、侵襲的な装置は、重合条件に干渉するときには、速度測定の実行には適さない。
【0008】
従来知られている他の方法は、重合プロセスでの使用には適していない。例えば、システム中での固体の循環を測定するためにポリマー流へ放射性粒子を添加することは、実現できそうにない。なぜなら、放射性粒子は、放出されるポリマーと一緒に必然的に取り除かれるからである。さらに、反応媒体中に放射性粒子が存在することは、密度測定を行なうために重合プロセスにおいて一般に使用されるγ線機器によって実行される測定の邪魔になるであろう。
【0009】
また、光ファイバ光学系を含む、電磁波と固体との間の相互作用に基づく光学系は、いくつかの工業プロセスにおいて既に使用可能である。分散系での光伝播の減衰度に基づく光度計が説明されてきた。
【0010】
例えば、DE-A-38 33 899は、遠隔測定のための分光光度計を開示する。測定光ユニットと残留光処理ユニットとの間の光導波路がウインドウによってサンプルに連結され、駆動可能なフィルタホイール(filter wheel)が、測定光源として働くフラッシュランプと、ビームスプリッタの間に配置される。これは、参照の測定と信号の測定の正確さがパルシング(pulsing)によって改善されるという点において、通常の光度計よりも改善されている。しかし、パルスシステム(pulsed system)の使用は、連続的なプロセス制御が要求されるときに不利である。さらに、この光度計は、高濃度の系では使用できない。
【0011】
また、US 4,752,131で説明されているレーザ−光学配置は、分散度を決定するために分散及び懸濁している個々の粒子を解析するために同様の構造を有しており、前記したものと同じ不利点を示す。
【0012】
従来の方法及び装置は、重合プロセスに含まれる厳しい圧力及び温度条件で径の大きなパイプ及び/又は反応器に適用すると、高精度速度測定ができない。
【0013】
EP 472 899には、分散系での光伝播の減衰度を測定するための光度計が開示されている。前記光度計は、懸濁液の色、又はその中に分散されている固体粒子のサイズ、又はその固体の濃度を決定するのに使用することが提案されている。気体又は液体媒体中を流れる固体粒子の速度を測定するために前記光度計を使用することは、EP 472 899には記載されていない。
【0014】
厳しい圧力及び温度条件において機能し、重合プロセスにおけるポリマー粒子速度を効率的かつ正確な測定が可能な非侵襲的測定機器を提供することは望ましいであろう。
【0015】
高温及び高圧が要求される重合プロセスにおいて動作させるときに、特定の光度計を使用することによって非常に正確な固体粒子の速度測定を連続的に行なうことができることが予想外に見出された。
【課題を解決するための手段及び発明の効果】
【0016】
従って、これが、本発明、重合プロセス中の二相流内を流れる成長ポリマー粒子の速度を監視する方法であって、光度計により前記二相流内での光伝搬の減衰度を測定することからなり、前記光度計は、1つ以上の光源を前記二相流に連結する1つ以上の送信光導波路と、前記二相流を光検出器に連結する1つ以上の受信光導波路とを備える方法、の目的である。
【0017】
本発明による方法は、二相流内を流れる固体粒子の速度の監視に適し、従って、重合プロセス中の固体循環制御に有利に適用することができる。
【0018】
重合プロセスでは、反応媒体が存在している反応ゾーンに、触媒粒子とモノマーが一緒に供給される。大部分のプロセスでは、重合が進むと、ポリマー粒子を含む二相流が形成される。重合が気相又は液相のどちらで実行されるかに従って、前記二相流は、気体/固体流又は液体/固体流になることができ、1つ以上のモノマーと接触して成長する固体ポリマー粒子を含む。
【0019】
本発明の方法は、好ましくは、前記二相流中でのポリマー濃度が容量で5〜70%であり、ポリマー粒子の流れが実質的に一方向に沿っている何れの重合プロセスにも適用される。例えば、ループ状反応器又は管状反応器において実行される気相又は液相重合は、本発明の範囲内である。
【0020】
本発明の制御方法は、EP 472 899で説明されている光度計を、パイプ又は反応器内を流れるポリマー粒子の速度測定に適用して、利用する。
【0021】
前記光度計の作用は、気体又は液体媒体を流れるポリマー粒子の特性の関数として、光源から検出器に到達する光の強度を測定することに基づいている。光源、光検出器及び二相流の配置に応じて、流れ特性について測定された信号には、種々の依存関係がある。その理由は、光の伝播又は減衰は、二相流の流動化条件の、さらに一般的には、散乱及び吸収特性の関数である。二相流の光学特性は、プロセス制御の基礎となるポリマー流に依存するという結論になる。
【0022】
本発明で使用される光度計は、EP 472 899で説明されているように、3種類の測定配置(送信、擬似後方散乱、レミッション(remission)モード)に従って機能する。
【0023】
送信モードでは、二相流を通じて送信された光が測定される。擬似後方散乱モードでは、分散媒体中の光の拡散伝播の結果として入射方向に後方散乱されるが別のファイバに入る光が測定される。
【0024】
レミッションモードでは、光導波路を終端させる透明な平坦要素の媒体側境界面で拡散されて反射される光であって、一般に、その境界面自体の反射光ではないものが、測定される。
【0025】
光導波路連結の擬似後方散乱配置は、重合中のポリマー粒子の速度の正確かつ連続的制御であり、本発明の目的を達成するのに有利であることが見出された。
【0026】
光度計は、壁に光度計を取り付ける重合反応器のどの位置にも都合よく配置することができる。光導波路連結の、1つ以上の送信光導波路と1つ以上の受信光導波路は、重合反応器の壁に擬似後方散乱配置で配置される。
【0027】
重合中のプロセス制御での正確な結果は、重合条件への干渉をできるだけ避けることによって得られる。これは、反応器の内部に顕著に突き出さないように送信及び受信光導波路の端を配置することによって達成される。好ましくは、送信及び受信光導波路の反応器側の端は、反応器の壁に対して同一平面に配置される。光源から来る光は、送信光導波路を介してポリマー粒子を含む二相流に到達し、ポリマーによって入射方向に後方散乱され、受信光導波路に入る。光導波路連結の技術で知られているように、各送信光導波路は、1つ以上の送信ファイバを含むことができ、各受信光導波路は、1つ以上の受信ファイバを含むことができる。
【0028】
好ましい実施形態によると、前記送信及び受信光導波路の反応器側の端は、ペアになって、互いに並んで配置される。送信及び受信光導波路の第1及び第2ペアは、ポリマー流の方向に適切な距離を開けて配置される。つまり、前記実施形態では、光度計は、光源を反応器の壁に連結する2つの送信光導波路と、反応器の壁を光検出器に連結する2つの受信光導波路を備える。2つの受信光導波路の反応器側の端と同様に、2つの送信光導波路の反応器側の端も、ポリマー粒子の流れに沿って、10mm未満の距離、好ましくは0.2〜6mmの距離を開けて配置される。
【0029】
気相重合プロセスでは、必要に応じて動作し、光導波路の端に堆積する微紛、塊(chunk)、薄板を吹き飛ばして光導波路の端をきれいにすることができる、モノマー、不活性ガス又はその混合物のフラックシング(fluxing)を配置することが有利であることがある。前記フラックシングは、光導波路の端に近接して、好ましくは前記端の接線方向に配置される。
【0030】
重合反応器内を走るポリマー粒子の速度を監視するために使用されるとき、本発明の方法は、厳しい温度及び圧力及びポリマー濃度条件下で重合が行なわれるとしても、ポリマー速度の高精度評価を行なう。体積で30〜70%の範囲のポリマー濃度でさえ、本発明の方法は、再現可能な優れた結果を与えることができる。
【0031】
例えば、重合が2つの相互接続された重合ゾーンで実行される、EP 0 782 587及びEP 1 012 195に開示された気相プロセスでは、重合条件は厳しいものになる。ここで、気相プロセスにおいて1つ以上のα−オレフィンの重合を非限定的に参照して、本発明の方法を説明する。この方法では、前記成長ポリマー粒子は、高速流動化条件下の第1重合ゾーンを通じて上方に流れ、第1重合ゾーンを離れ、第2重合ゾーンに入って、そこで重力作用下で密度が高められた状態で流れ、第2重合ゾーンを離れ、第1重合ゾーンに再導入され、このように、2つの重合ゾーン間でのポリマーの循環を起こさせる。
【0032】
第2重合ゾーンでの動作条件は、従来の速度測定機器には特に厳しい。温度は50℃〜120℃、圧力は1.5MPa〜6MPa、ポリマー濃度(反応器の単位m3当たりのポリマーのm3)は、体積で30〜60%程度である。ポリマーが重力の作用下で密度が高められた状態で流れるので、前記濃度は特に高い。
【0033】
固体粒子の濃度が高いので、隣接する粒子間の相対運動は事実上存在せず、均一な下向きの固体の流れが、0.1〜1m/s程度の速度で第2重合ゾーンを通過する。
【0034】
例えばγ線機器による密度測定と共に行なわれる速度測定は、重合プロセス、特にEP 0 782 587及びEP 1 012 195で説明されている重合プロセスではでは非常に重要なパラメータであるポリマーの質量流量、すなわち循環速度の直接かつ高精度な測定を行なう。ポリマー粒子の速度は、ポリマーが上述の2つの異なる重合ゾーンを通過する平均回数(サイクル)に影響を与える。その結果、得られたポリマーの例えば均一性、分子量分布、コポリマー組成分布のようないくつかの特性は、反応器内を流れる前記ポリマー粒子の速度を調節することによって制御可能である。目標は、所望の品質の生産物を得るために、前記速度を制御下に保つことである。
【0035】
循環速度は、2モードのホモポリマー又はコポリマーを生産するとき、つまり、組成が異なる2つの重合ゾーンが反応器内に設けられるとき、特に重要である。EP 1 012 195で説明されているように、第2重合ゾーンの上部に気体又は液体混合物を供給することによって、組成が異なる2つの重合ゾーンを反応器内で得ることは可能である。前記混合物は、第1重合ゾーンから来るガスへのバリアとして機能する。ポリマー循環速度のいかなる変動も、前記バリアの効率に影響を与える。実際に、循環速度が大きくなるほど、第1重合ゾーンから来る気体(gas)が高く(high)なり、その結果、第2重合ゾーンの上部に供給される気体又は液体混合物の流速が大きくなる。
【0036】
また、1モードの生産では、バリアが供給されないとき、循環速度は、重要なパラメータである。実際、ポリマーの速度は、反応器内での温度に直接影響を与える。重合は、発熱プロセスであり、従って、反応器内の熱点を避けるために熱の除去が必要である。熱点が形成されると、ポリマーの溶融が起こり、塊が形成され、壁が汚れる。これは、反応器の停止に繋がる。ポリマーが第2重合ゾーンで下降するにつれてポリマーの温度は上昇する。従って、第2重合ゾーンの下部において、この状況は特に深刻である。ポリマーの濃度が高いので、相対的に熱移動係数が低くなり、少量の気体が冷却媒体として機能する。同等の冷却のために、ポリマー粒子の速度が小さくなるほど、第2重合ゾーンでの温度を高くする。従って、固体ポリマー粒子が、プロセスによって要求される時間だけ、前記ゾーン内に滞留することが重要である。従って、ポリマー速度を制御下に保持するために、光度計は、第2重合ゾーンに配置することが有利である。好ましくは、光度計は、第2重合ゾーンの下部に配置される。
【0037】
2つの重合ゾーンの間を循環する固体ポリマー粒子の速度は、第2重合ゾーンの下部に配置された例えば漏斗形の絞りと、絞りの下流に配置される調節可能な機械弁により、都合よく制御することができる。前記機械弁の有利な例は、スロットル弁又は蝶形弁である。
【0038】
ポリマー粒子をひきずり、絞りを通じたポリマー粒子の流れを容易にするために、気体流(以下、「投与ガス」として参照する)を導入することには利点がある。好ましくは、前記投与ガスは、未反応のモノマーのリサイクルラインから取られる。第2重合ゾーンを通じたポリマー粒子の流れは、機械弁と、第2重合ゾーンの下部に、特に絞りと機械弁の直ぐ上の位置に導入される投与ガスにより調節される。投与ガスの流速と機械弁の開口が大きくなるほど、ポリマー粒子の速度が大きくなる。
【0039】
第2重合ゾーンでのポリマーの速度を監視することが重要なので、前記ポリマー速度に作用する制御系を配置することは重要である。ある実施形態では、本発明の制御方法は、閉ループ制御系であり、すなわち、制御変数が測定され、その測定の結果が1つ以上のプロセス変量の操作に使用される。特に、投与ガスの流速と機械弁の開口(プロセス変量)は、第2重合ゾーンでのポリマー粒子の速度(制御変数)を0.1〜1m/s、好ましくは0.2〜0.7m/sからなる範囲に維持するように、光度計の出力値に応答する。光度計は、ポリマー粒子の速度をオンラインで測定し、評価ユニット、例えばプログラマブルロジック制御器又はパーソナルコンピュータによって処理された出力信号をリアルタイムで返す。測定された速度値は、所望のポリマー粒子速度又は設定値と比較する。差が存在すれば、制御器は、機械弁の開口と投与ガスの流速を変化させる。さらに正確には、測定された速度が設定値以下であれば、制御器は、機械弁の開口を広げ、投与ガスの流速を大きくし、その逆も成り立つ。比例積分制御器(PI)が、この目的に便利なことがある。
【0040】
本発明の他の特徴は、添付図面を参照して与えられる以下の説明を読むことによってさらに明らかになるであろう。添付図面は、説明の目的で与えられ、本発明の範囲を限定するためのものではない。
【発明を実施するための最良の形態】
【0041】
図1を参照すると、光源1は、連続光源、つまり、安定化高輝度白色光源、例えば楕円反射器を有するキセノン小型アークランプ、集光器を有するハロゲンランプ、又は安定化LEDである。束の外装2は、送信光導波路3及び4と、受信光導波路5及び6を含み、反応器9の壁8に形成されたタップ7にねじ込まれている。
【0042】
光源1が連続光ビームを放射すると、その光は、送信光導波路3及び4に沿って進み、反応器内を下向きに流れるポリマー粒子に衝突する。ポリマー粒子によって入射方向に後方散乱された光は、受信光導波路5及び6のそれぞれによって受信され、評価ユニット10に送られる。さらに正確には、送信光導波路3によって反応器の内部に送信された光は、ポリマー粒子によって後方散乱され、受信光導波路5によって受信され、評価ユニット10に送信される。同様に、送信光導波路4によって送信された光は、受信光導波路6によって受信される。
【0043】
送信光導波路3及び4、及び受信光導波路5及び6の端部は、反応器9の壁と同一平面上に配置される。
【0044】
評価ユニット10は、光信号の送信から受信までのシステム全体を管理する。特に、その光が電気信号に変換され、その電気信号がポリマー粒子の速度を指し示す出力11に変換される。実際に、受信光導波路5及び6によって運ばれる、正弦波の形で現れる2つの光信号間の強度の比較によって、評価ユニットは、位相シフトを計算する。位相シフトは、ポリマー粒子が受信光導波路5及び6の端同士の間の距離を覆うのにかかる時間に対応している。速度は、2つの対応した受信光導波路5及び6間の、ポリマー粒子の流れに沿った距離を知ることによって計算する。前記距離dは、0.2〜6mmの間で変化する。
【0045】
図2を参照すると、図1の光度計の送信及び受信光導波路の反応器側の端の正面図が与えられる。
【0046】
送信及び受信光導波路の反応器側の端は、互いにペアになって構成される。四対の送信及び受信光導波路が提供され、2つの独立した速度測定を行うことができる。1つはT1/R1−T2/R2の組からであり、1つはT3/R3−T4/R4の組からである。言い換えると、T3/R3−T4/R4の組は、T1/R1−T2/R2の組と重複している。
【0047】
反応器9の内部を図1の光源1に連結する、送信光導波路3及び4の反応器側の端T1及びT2は、上述の通り、距離dを開けて配置されている。図1の受信光導波路5及び6の反応器側の端R1及びR2は、同じ距離dで隔てられている。
【0048】
速度測定が一旦行われると、重合プロセスにおいて、それを制御変数として用いることができる。特に、図3を参照すると、光度計117は、EP 1 012 195で開示された気相プロセスでのポリマー循環速度の測定に適用される。
【0049】
成長中のポリマーは、矢印114の方向に沿って、高速流動化条件下の第1重合ゾーンを通って流れる。第2重合ゾーン102では、成長中のポリマーは、重力の作用下で、矢印114’の方向に沿って、密度が高められた状態で流れる。2つの重合ゾーン101及び102は、セクション103及び105によって相互に連結される。物質収支は、モノマー及び触媒を供給し、ポリマーを放出することによって維持される。
【0050】
一般に、第1重合ゾーン101の高速流動化条件は、ライン109を通じて供給され、セクション105から来る1つ以上の成分からなる気体混合物によって達成される。セクション105は、第2重合ゾーン102から第1重合ゾーン101へのポリマーの移送を可能にする。気体混合物の一部は、ポリマーを第1重合ゾーン101へ再導入する位置の下方に位置するライン110を通じて第1重合ゾーン101に供給することができる。
【0051】
第1重合ゾーン101に注入される輸送気体の速度は、動作条件下での輸送速度よりも大きくなければならず、気体密度と固体の粒子サイズ分布に依存する。この速度は、好ましくは0.5〜15m/s、さらに好ましくは0.8〜5m/sとなるように構成されている。
【0052】
第1重合ゾーン101を離れるポリマーと気体混合物は、固体/気体分離ゾーン104に運ばれる。固体/気体分離は、従来の分離手段、例えば慣性型分離器、遠心型分離器又はこれら2つの組合せを用いて行なうことができる。
【0053】
ポリマーは、分離ゾーン104から第2重合ゾーン102に入る。分離ゾーン104を離れる気体混合物は、圧縮され、冷却され、そしてライン109を通じて第1重合ゾーン101へ移送される。この際、適切であれば、構成モノマー及び/又は分子量調整剤及び/又は不活性気体を加える。気体混合物の移送は、圧縮手段107と、冷却手段108と、モノマー、分子量調整剤及び任意で不活性気体を供給するライン113とを備えるリサイクルライン106により行なわれる。分離ゾーン104を離れる気体混合物の一部は、圧縮及び冷却した後、ライン110を通じて第1重合ゾーン101の下部に移送することができる。第1重合ゾーン101に送る気体のほとんど全部を、ライン110を通じて導入することができる。一方、第2重合ゾーン102から来るポリマーの流れを調整し、それをセクション105を通じて輸送するのに必要な、より少ない量を、ライン109を通じて導入することができる。
【0054】
一般に、種々の触媒成分が、好ましくは第1重合ゾーン101の下部に配置されるライン112を通じて第1重合ゾーン101に供給される。ポリマーは、ライン111を通じて放出することができる。ライン111は、同伴気体の量を最小にするように、ポリマー粒子がより密集した状態で流れる第2重合ゾーン102に配置されるのが有利である。
【0055】
分離ゾーン104で循環する固体から分離された気体混合物が、第2重合ゾーン102に入るのを防止することができる。これは、第2重合ゾーン102の適切な位置に、好ましくは第2重合ゾーン102の上部に配置されたライン115を通じて第2重合ゾーン102へ気体及び/又は液体を供給することによって行なうことができる。第2重合ゾーン102に供給される気体及び/又は液体混合物は、第1重合ゾーン101で存在する気体混合物の組成とは異なった、適切な組成を有するべきである。前記気体及び/又は液体混合物は、部分的に又は完全に、降下管に入るポリマー粒子に同伴している気体混合物に取って代わる。この気体供給の流速は、ポリマー粒子の流れに対向する気体流が、第2重合ゾーン102で、好ましくは第2重合ゾーン102の上部で始まるように、調整することができる。この気体流は、第1重合ゾーン101から来る、ポリマー粒子に同伴している気体混合物に対するバリアとして働く。
【0056】
漏斗のような形の絞り120は、第2重合ゾーン120の下の方に都合よく形成することができる。機械弁121がその中に配置される。
【0057】
前に説明したように、第2重合ゾーン120の下部を通じたポリマー粒子の流れは、機械弁121の開口と、投与ガスの流速を変化させることによって都合よく調節される。前記投与ガスは、絞り120の直ぐ上方に配置されたライン116によって第2重合ゾーンの下部に供給される。ライン116を通じて導入される気体は、リサイクルライン106から、より正確には冷却手段108の上流から都合よく取り込まれる。投与ガスの流速は、ライン116に配置された、例えば蝶形弁のような機械弁である空気圧制御弁118により調節される。
【0058】
光度計117は、好ましくは、前記ライン116の上方に配置され、第2重合ゾーン102の壁に取り付けられる。その結果、光度計117は、第2重合ゾーン102内を流れるポリマー粒子の速度の評価を行なう。その評価は、デジタル信号に変換され、高度プロセス制御器(APC)119に送られる。
【0059】
速度の評価に応じて、APC119は、弁118の開口に作用し、第2重合ゾーン102に導入される投与ガスの流速を調節する。さらに、APC119は、機械弁121の開口を調節することもできる。その結果、APC119は、ポリマー粒子の速度を制御し、その速度を所望値に維持する。
【図面の簡単な説明】
【0060】
【図1】重合反応器に適用される本発明の光度計の擬似後方散乱配置を示す図式表示である。
【図2】図1の光度計の光導波路の反応器側の端の図式表示である(正面図)。
【図3】EP 1 012 195で説明されている重合プロセスに適用された本発明の制御方法の図式表示である。
【特許請求の範囲】
【請求項1】
重合プロセス中の二相流内を流れる成長ポリマー粒子の速度を監視する方法であって、
光度計により前記二相流内での光伝搬の減衰度を測定することからなり、
前記光度計は、1つ以上の光源を前記二相流に連結する1つ以上の送信光導波路と、前記二相流を光検出器に連結する1つ以上の受信光導波路とを備える方法。
【請求項2】
前記二相流は、気体/固体流である請求項1に記載の方法。
【請求項3】
前記二相流は、液体/固体流である請求項1に記載の方法。
【請求項4】
前記二相流中でのポリマー濃度は、容量で、5〜70%である請求項1〜3の何れか1つに記載の方法。
【請求項5】
ポリマー粒子の流れは、実質的に一方向に沿っている請求項1〜4の何れか1つに記載の方法。
【請求項6】
前記送信及び受信光導波路は、重合反応器の壁に擬似後方散乱配置で配置される
請求項1〜5の何れか1つに記載の方法。
【請求項7】
前記送信及び受信光導波路の反応器側の端は、前記反応器の壁に対して同一平面に配置される請求項1〜6の何れか1つに記載の方法。
【請求項8】
前記送信及び受信光導波路の反応器側の端は、ペアになって、互いに並んで配置される請求項1〜7の何れか1つに記載の方法。
【請求項9】
前記光度計は、前記光源を前記反応器の壁に連結する2つの送信光導波路を備える請求項1〜8の何れか1つに記載の方法。
【請求項10】
前記光度計は、前記反応器の壁を前記光検出器に連結する2つの受信光導波路を備える請求項1〜9の何れか1つに記載の方法。
【請求項11】
前記2つの受信光導波路の反応器側の端は、10mm未満の距離を開けて配置されている請求項10に記載の方法。
【請求項12】
前記距離は、0.2〜6mmである請求項11に記載の方法。
【請求項13】
前記ポリマー粒子は、気相プロセスにおいて1つ以上のα−オレフィンの重合によって得られ、
前記気相プロセスにおいて、前記成長ポリマー粒子は、高速流動化条件下の第1重合ゾーンを通じて上方に流れ、第1重合ゾーンを離れ、第2重合ゾーンに入って、そこで重力作用下で密度が高められた状態で流れ、第2重合ゾーンを離れ、第1重合ゾーンに再導入され、このように、2つの重合ゾーン間でのポリマーの循環を起こさせる、請求項1〜12の何れか1つに記載の、ポリマー粒子の速度を監視する方法。
【請求項14】
光度計は、第2重合ゾーンの下部に配置される請求項13に記載の方法。
【請求項15】
第2重合ゾーンにおいて、前記ポリマー濃度は、容量で、30〜60%である請求項13又は14に記載の方法。
【請求項16】
第2重合ゾーンにおいて、温度は、50℃〜120℃である請求項13〜15の何れか1つに記載の方法。
【請求項17】
第2重合ゾーンにおいて、圧力は、1.5MPa〜6MPaである請求項13〜16の何れか1つに記載の方法。
【請求項18】
第2重合ゾーンを通じたポリマー粒子の流れは、第2重合ゾーンの下部に導入される投与ガスによって調節される請求項13〜17の何れか1つに記載の方法。
【請求項19】
前記投与ガスの流速は、ポリマー粒子の速度を0.1〜1m/sからなる範囲に維持するように、前記光度計の出力値に応答する請求項18に記載の方法。
【請求項20】
第2重合ゾーンを通じたポリマー粒子の流れは、第2重合ゾーンの下部に配置された機械弁の開口によって調節される請求項13〜19の何れか1つに記載の方法。
【請求項21】
前記機械弁の開口は、ポリマー粒子の速度を0.1〜1m/sからなる範囲に維持するように、前記光度計の出力値に応答する請求項20に記載の方法。
【請求項22】
前記機械弁は、蝶形弁である請求項20又は21に記載の方法。
【請求項1】
重合プロセス中の二相流内を流れる成長ポリマー粒子の速度を監視する方法であって、
光度計により前記二相流内での光伝搬の減衰度を測定することからなり、
前記光度計は、1つ以上の光源を前記二相流に連結する1つ以上の送信光導波路と、前記二相流を光検出器に連結する1つ以上の受信光導波路とを備える方法。
【請求項2】
前記二相流は、気体/固体流である請求項1に記載の方法。
【請求項3】
前記二相流は、液体/固体流である請求項1に記載の方法。
【請求項4】
前記二相流中でのポリマー濃度は、容量で、5〜70%である請求項1〜3の何れか1つに記載の方法。
【請求項5】
ポリマー粒子の流れは、実質的に一方向に沿っている請求項1〜4の何れか1つに記載の方法。
【請求項6】
前記送信及び受信光導波路は、重合反応器の壁に擬似後方散乱配置で配置される
請求項1〜5の何れか1つに記載の方法。
【請求項7】
前記送信及び受信光導波路の反応器側の端は、前記反応器の壁に対して同一平面に配置される請求項1〜6の何れか1つに記載の方法。
【請求項8】
前記送信及び受信光導波路の反応器側の端は、ペアになって、互いに並んで配置される請求項1〜7の何れか1つに記載の方法。
【請求項9】
前記光度計は、前記光源を前記反応器の壁に連結する2つの送信光導波路を備える請求項1〜8の何れか1つに記載の方法。
【請求項10】
前記光度計は、前記反応器の壁を前記光検出器に連結する2つの受信光導波路を備える請求項1〜9の何れか1つに記載の方法。
【請求項11】
前記2つの受信光導波路の反応器側の端は、10mm未満の距離を開けて配置されている請求項10に記載の方法。
【請求項12】
前記距離は、0.2〜6mmである請求項11に記載の方法。
【請求項13】
前記ポリマー粒子は、気相プロセスにおいて1つ以上のα−オレフィンの重合によって得られ、
前記気相プロセスにおいて、前記成長ポリマー粒子は、高速流動化条件下の第1重合ゾーンを通じて上方に流れ、第1重合ゾーンを離れ、第2重合ゾーンに入って、そこで重力作用下で密度が高められた状態で流れ、第2重合ゾーンを離れ、第1重合ゾーンに再導入され、このように、2つの重合ゾーン間でのポリマーの循環を起こさせる、請求項1〜12の何れか1つに記載の、ポリマー粒子の速度を監視する方法。
【請求項14】
光度計は、第2重合ゾーンの下部に配置される請求項13に記載の方法。
【請求項15】
第2重合ゾーンにおいて、前記ポリマー濃度は、容量で、30〜60%である請求項13又は14に記載の方法。
【請求項16】
第2重合ゾーンにおいて、温度は、50℃〜120℃である請求項13〜15の何れか1つに記載の方法。
【請求項17】
第2重合ゾーンにおいて、圧力は、1.5MPa〜6MPaである請求項13〜16の何れか1つに記載の方法。
【請求項18】
第2重合ゾーンを通じたポリマー粒子の流れは、第2重合ゾーンの下部に導入される投与ガスによって調節される請求項13〜17の何れか1つに記載の方法。
【請求項19】
前記投与ガスの流速は、ポリマー粒子の速度を0.1〜1m/sからなる範囲に維持するように、前記光度計の出力値に応答する請求項18に記載の方法。
【請求項20】
第2重合ゾーンを通じたポリマー粒子の流れは、第2重合ゾーンの下部に配置された機械弁の開口によって調節される請求項13〜19の何れか1つに記載の方法。
【請求項21】
前記機械弁の開口は、ポリマー粒子の速度を0.1〜1m/sからなる範囲に維持するように、前記光度計の出力値に応答する請求項20に記載の方法。
【請求項22】
前記機械弁は、蝶形弁である請求項20又は21に記載の方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公表番号】特表2006−519385(P2006−519385A)
【公表日】平成18年8月24日(2006.8.24)
【国際特許分類】
【出願番号】特願2006−504467(P2006−504467)
【出願日】平成16年2月24日(2004.2.24)
【国際出願番号】PCT/EP2004/001845
【国際公開番号】WO2004/078792
【国際公開日】平成16年9月16日(2004.9.16)
【出願人】(501468046)バセル ポリオレフィン イタリア エス.アール.エル. (33)
【住所又は居所原語表記】Via Pergolesi 25,20124 Milano,Italy
【Fターム(参考)】
【公表日】平成18年8月24日(2006.8.24)
【国際特許分類】
【出願日】平成16年2月24日(2004.2.24)
【国際出願番号】PCT/EP2004/001845
【国際公開番号】WO2004/078792
【国際公開日】平成16年9月16日(2004.9.16)
【出願人】(501468046)バセル ポリオレフィン イタリア エス.アール.エル. (33)
【住所又は居所原語表記】Via Pergolesi 25,20124 Milano,Italy
【Fターム(参考)】
[ Back to top ]