
重心保持制御付車輪を備えたオートバイ
【課題】本発明は、オートバイのカーブ走行時等に、発生する強い遠心力を、前輪と後輪の重心移動で解消し、オートバイを傾ける事無く水平に保持する技術を提供する。
【解決手段】カーブ走行時には、ハンドルを左右に切るが、前・後輪の車輪制御モータ8は、ギアーA6と共に回転し、かみ合っているギアーB7と共に車輪操舵回動体3も回転するので、タイヤ車輪2は左右に適度に傾く。この時ハンドルは、ハンドル軸受体12がタイヤ車輪2の傾きを、ベアリングが回転して逃がすので、ハンドルは傾斜方向には動かず、オートバイ本体と共に水平を保ちハンドル操作での左右の動きだけ出来る構造になっている。この動きにより、重心も適正に垂直方向にあるので、たとえ強い遠心力が生じても、常に水平状態でオートバイのスムーズなカーブ運転が可能である。
【解決手段】カーブ走行時には、ハンドルを左右に切るが、前・後輪の車輪制御モータ8は、ギアーA6と共に回転し、かみ合っているギアーB7と共に車輪操舵回動体3も回転するので、タイヤ車輪2は左右に適度に傾く。この時ハンドルは、ハンドル軸受体12がタイヤ車輪2の傾きを、ベアリングが回転して逃がすので、ハンドルは傾斜方向には動かず、オートバイ本体と共に水平を保ちハンドル操作での左右の動きだけ出来る構造になっている。この動きにより、重心も適正に垂直方向にあるので、たとえ強い遠心力が生じても、常に水平状態でオートバイのスムーズなカーブ運転が可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は通常走行中のオートバイが左右方向に、ハンドルを切る際に左右に大きなトルクが発生するので、オートバイを倒し傾けて走行する事になる。この状態は重心バランスが悪く、走行する路面状況により時にスリップして転倒する恐れが発生する。これらを解消するためのオートバイ技術に関するものである。
【背景技術】
【0002】
従来、オートバイは垂直にバランスを取って、二輪走行するように作られている。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、四輪自動車に比較してタイヤの接地が、二点と云う事で、重心(16)のバランス面で劣るのは確かである。このためにオートバイの構造上、カーブ走行では車体を倒し傾けて行かないと、曲がることが難しかった。とくにオートバイレースを見れば良くわかるのである。この傾けることは全体の重心バランスが悪くなり、危険を伴う事が欠点であった。
これら問題点を改善するために本発明はなされたのである。
【課題を解決するための手段】
【0004】
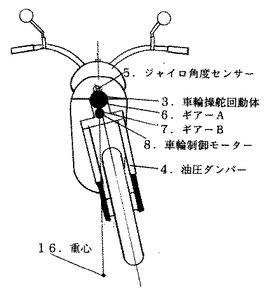
この課題を解決する手段として、カーブに於いてもオートバイの車体を、傾ける必要は無く、重心(16)が垂直方向に保たれて入れば良いのである。勿論自主的には、傾ける事は出来るが、急カーブに於いても、ほんの少しの傾きで済む。以下、その構造構成を説明する。オートバイ本体(1)のタイヤ車輪(2)に取付けられた、油圧ダンパー(4)の上部に直結固定させて、これに車輪操舵回動体(3)を設ける。この車輪操舵回動体(3)の適当なる位置に、ジャイロ角度センサー(5)を設ける。
【0005】
つぎに後輪側の該回動体に、ギアーA(6)を取付けて設け、さらにギアーB(7)を装着した車輪制御モーター(8)を、このギアー同士噛合わせてオートバイ本体(1)の適当なる位置に設ける。次ぎに前輪側の該回動体にもギアーA(6)を設ける。さらにギアーB(7)を装着した車輪制御モーター(8)をギアー同士噛合わせて、これまたオートバイ本体(1)の適当なる位置に設ける。そして前輪側と後輪側のギアーA(6)の軸に直結して、両端にベアリング軸受(9)を配置して設けたフレーム(10)を設ける。このフレーム(10)はオートバイ本体(1)の骨格として、各部適当なる位置に設けられている。
【0006】
さらに前輪側の該回動体に、ハンドル(11)を固定するハンドル軸受体(12)を設ける。これにハンドル(11)を取付けて設ける。またさらにオートバイ本体(1)の、ハンドル(11)の左右の操舵位置や重心(16)と共にタイヤ車輪(2)の傾きを検知する、ジャイロ角度センサー(5)に連動して配線を施した、モーター制御回路(13)を座席下部等に設ける。さらに各種モーター駆動用の動力用にもなる大容量バッテリー(14)を設ける。
【0007】
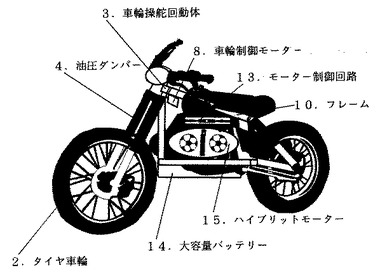
また従来のエンジン(17)を搭載したオートバイ本体(1)に、ハイブリットモーター(15)を設けて、モーター制御回路(13)によって、エンジン(17)とモーターをコントロールさせた、ハイブリットオートバイにも本発明を採用する。
本発明は以上のような構成よりなる、重心保持制御付車輪を備えたオートバイである。
【発明の効果】
【0008】
従来、カーブ走行中は外へ外へと重心にトルクが働くので、通常であればスピードを極端に落として走行しないと危険である。またオートバイ本体も傾斜する必要が生ずる。しかし本発明は、ハンドル操作と共に前輪および後輪が外に、内に、トルクの大きさに応じて、車輪制御モーターにより、角度移動するので重心も移動して、常にオートバイを傾ける事なく、垂直中心にドライバーと共に重心がある事になり、カーブ走行中の安定性は、大きく向上した。
また本発明は、ハイブリッドオートバイや電気オートバイ等にも、多目的に採用する事ができる。
【発明を実施するための最良の形態】
【0009】
本発明はカーブ走行時に、ハンドル操作に応じて前輪と後輪だけが、適度に傾き角度を変えていくので、カーブに於いてもオートバイ本体と搭乗ドライバーは、水平を保ったままの安定操縦が出来るのである。これを念頭に於いてベストモードとしての本発明を、以下、図面を参考に説明する。図2、図3、図4のごとく、まずオートバイ本体(1)の前後のタイヤ車輪(2)に、油圧ダンパー(4)が装着してるが、これの上端部に直結で固定して、車輪操舵回動体(3)を設ける。
【0010】
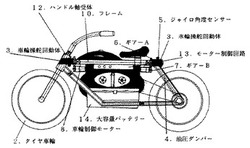
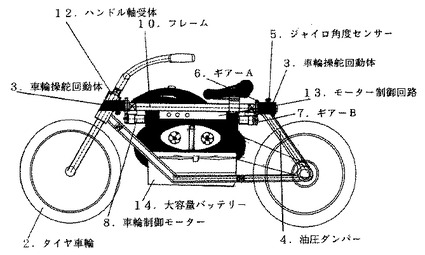
この、車輪操舵回動体(3)での動きが、本発明の核心部分であり、その構造構成を詳しく説明すると、図2のごとく、まず後輪の車輪操舵回動体(3)に対して、重心位置を検知するジャイロ角度センサー(5)を装着する。つぎに該回動体にギアーA(6)を固定して設ける。つぎにギアーB(7)を設けた車輪制御モーター(8)を、ギアーA(6)とギアー(B)をしっかりと噛合わせた形で、オートバイ本体(1)に固定して設ける。一方、前輪側の該回動体にもギアーA(6)を設ける。さらにギアーB(7)を装着した車輪制御モーター(8)をギアー同士噛合わせて、これまたオートバイ本体(1)の適当なる位置に設ける。そして前輪側と後輪側のギアーA(6)の軸に直結して、両端にベアリング軸受(9)を配置して設けたフレーム(10)を設ける。このフレーム(10)はオートバイ本体(1)の骨格として、各部適当なる位置に設けられている。さらに前輪側の該回動体に、ハンドル(11)を固定するハンドル軸受体(12)を設ける。これにハンドル(11)を取付けて設ける。またさらにオートバイ本体(1)の、ハンドル(11)の左右の操舵位置や重心(16)と共にタイヤ車輪(2)の傾きを検知する、ジャイロ角度センサー(5)に連動して配線を施した、モーター制御回路(13)を座席下部等に設ける。さらに各種モーター駆動用の動力用にもなる大容量バッテリー(14)を設ける。また従来のエンジン(17)を搭載したオートバイ本体(1)に、ハイブリットモーター(15)を設けて、モーター制御回路(13)によってエンジン(17)とモーターをコントロールさせた、ハイブリットオートバイにも本発明を採用する。またさらにオートバイ本体(1)の、ハンドル(11)の左右の操舵角度の位置や、重心(16)の位置と共に、タイヤ車輪(2)の傾き具合を検知する、ジャイロ角度センサー(5)に、連動して作動させるために配線を施してなる、モーター制御回路(13)を、座席下部等に設ける。この該回路は図5のフローチャートのごとく、動作する。さらに各種モーター駆動用(ハイブリッドモーター等)の動力用にもなる、大容量バッテリー(14)を設ける事はベストである。
【0011】
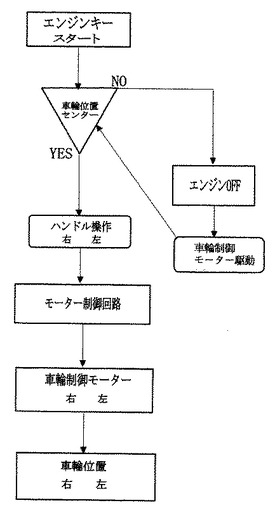
本発明は以上のような構成であり、これを使用せんとするときには、まず図5のごとくエンジンキースタートにより、オートバイはエンジンスタートを開始するが、タイヤ車輪(2)の位置が重心中心に無い時には、エンジンが始動しないようになっている。つまりこの時はハンドル(11)が左右にきられた状態で停止しているのである。これを解消するには、ハンドル(11)を真っすぐに修正してやれば、車輪制御モーター(8)が作動してタイヤ車輪(2)が、原点である重心に戻りスタート出来るのである。
【0012】
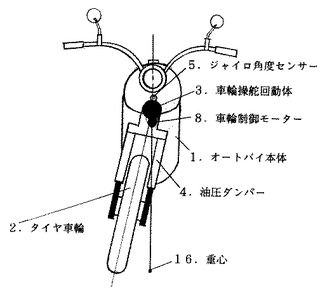
次ぎにエンジンキーONにすると、エンジンが始動する。走行が始まると、かならずハンドル操作は行われるが、カーブ等の走行でハンドルを左右にきって行くが、この時に遠心力の強さ程度、つまりハンドル角度の強弱や走行速度により、それらを、ジャイロ角度センサー(5)が読み取り、モーター制御回路(13)に信号が流れる。そしてこの信号を読み取り、解析して、前記回路より車輪制御モーター(8)を作動させる。例えば図3、図4のように、カーブ走行している場合は、ハンドル(11)を左右ににきるが、前輪および後輪の車輪制御モーター(8)は、ギアーA(6)と共に回転し、噛合っているギアーB(7)と共に車輪操舵回動体(3)も回転するので、タイヤ車輪(2)は左右に適度に傾くのである。この時ハンドル(11)は、ハンドル軸受体(12)がタイヤ車輪(2)の傾きを、ベアリングが回転して逃がすのて、ハンドル(11)は傾斜方向には動かず、オートバイ本体(1)と共に水平を保ちハンドル操作での左右の動きだけ出来る構造になっている。この動きにより、重心(16)も適正に垂直方向にあるので、たとえ強い遠心力が生じても、常に水平状態でオートバイのスムーズなカーブ運転が出来るのである。
【図面の簡単な説明】
【0013】
【図1】 本発明の全体斜視図である。
【図2】 本発明の側面図である。
【図3】 本発明のカーブ走行中の正面図である。
【図4】 本発明のカーブ走行中の背面図である。
【図5】 本発明の動作のフローチャートである。
【符号の説明】
【0014】
1.オートバイ本体
2.タイヤ車輪
3.車輪操舵回動体
4.油圧ダンパー
5.ジャイロ角度センサー
6.ギアーA
7.ギアーB
8.車輪制御モーター
9.ベアリング軸受
10.フレーム
11.ハンドル
12.ハンドル軸受体
13.モーター制御回路
14.大容量バッテリー
15.ハイブリットモーター
16.重心
17.エンジン
【技術分野】
【0001】
本発明は通常走行中のオートバイが左右方向に、ハンドルを切る際に左右に大きなトルクが発生するので、オートバイを倒し傾けて走行する事になる。この状態は重心バランスが悪く、走行する路面状況により時にスリップして転倒する恐れが発生する。これらを解消するためのオートバイ技術に関するものである。
【背景技術】
【0002】
従来、オートバイは垂直にバランスを取って、二輪走行するように作られている。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、四輪自動車に比較してタイヤの接地が、二点と云う事で、重心(16)のバランス面で劣るのは確かである。このためにオートバイの構造上、カーブ走行では車体を倒し傾けて行かないと、曲がることが難しかった。とくにオートバイレースを見れば良くわかるのである。この傾けることは全体の重心バランスが悪くなり、危険を伴う事が欠点であった。
これら問題点を改善するために本発明はなされたのである。
【課題を解決するための手段】
【0004】
この課題を解決する手段として、カーブに於いてもオートバイの車体を、傾ける必要は無く、重心(16)が垂直方向に保たれて入れば良いのである。勿論自主的には、傾ける事は出来るが、急カーブに於いても、ほんの少しの傾きで済む。以下、その構造構成を説明する。オートバイ本体(1)のタイヤ車輪(2)に取付けられた、油圧ダンパー(4)の上部に直結固定させて、これに車輪操舵回動体(3)を設ける。この車輪操舵回動体(3)の適当なる位置に、ジャイロ角度センサー(5)を設ける。
【0005】
つぎに後輪側の該回動体に、ギアーA(6)を取付けて設け、さらにギアーB(7)を装着した車輪制御モーター(8)を、このギアー同士噛合わせてオートバイ本体(1)の適当なる位置に設ける。次ぎに前輪側の該回動体にもギアーA(6)を設ける。さらにギアーB(7)を装着した車輪制御モーター(8)をギアー同士噛合わせて、これまたオートバイ本体(1)の適当なる位置に設ける。そして前輪側と後輪側のギアーA(6)の軸に直結して、両端にベアリング軸受(9)を配置して設けたフレーム(10)を設ける。このフレーム(10)はオートバイ本体(1)の骨格として、各部適当なる位置に設けられている。
【0006】
さらに前輪側の該回動体に、ハンドル(11)を固定するハンドル軸受体(12)を設ける。これにハンドル(11)を取付けて設ける。またさらにオートバイ本体(1)の、ハンドル(11)の左右の操舵位置や重心(16)と共にタイヤ車輪(2)の傾きを検知する、ジャイロ角度センサー(5)に連動して配線を施した、モーター制御回路(13)を座席下部等に設ける。さらに各種モーター駆動用の動力用にもなる大容量バッテリー(14)を設ける。
【0007】
また従来のエンジン(17)を搭載したオートバイ本体(1)に、ハイブリットモーター(15)を設けて、モーター制御回路(13)によって、エンジン(17)とモーターをコントロールさせた、ハイブリットオートバイにも本発明を採用する。
本発明は以上のような構成よりなる、重心保持制御付車輪を備えたオートバイである。
【発明の効果】
【0008】
従来、カーブ走行中は外へ外へと重心にトルクが働くので、通常であればスピードを極端に落として走行しないと危険である。またオートバイ本体も傾斜する必要が生ずる。しかし本発明は、ハンドル操作と共に前輪および後輪が外に、内に、トルクの大きさに応じて、車輪制御モーターにより、角度移動するので重心も移動して、常にオートバイを傾ける事なく、垂直中心にドライバーと共に重心がある事になり、カーブ走行中の安定性は、大きく向上した。
また本発明は、ハイブリッドオートバイや電気オートバイ等にも、多目的に採用する事ができる。
【発明を実施するための最良の形態】
【0009】
本発明はカーブ走行時に、ハンドル操作に応じて前輪と後輪だけが、適度に傾き角度を変えていくので、カーブに於いてもオートバイ本体と搭乗ドライバーは、水平を保ったままの安定操縦が出来るのである。これを念頭に於いてベストモードとしての本発明を、以下、図面を参考に説明する。図2、図3、図4のごとく、まずオートバイ本体(1)の前後のタイヤ車輪(2)に、油圧ダンパー(4)が装着してるが、これの上端部に直結で固定して、車輪操舵回動体(3)を設ける。
【0010】
この、車輪操舵回動体(3)での動きが、本発明の核心部分であり、その構造構成を詳しく説明すると、図2のごとく、まず後輪の車輪操舵回動体(3)に対して、重心位置を検知するジャイロ角度センサー(5)を装着する。つぎに該回動体にギアーA(6)を固定して設ける。つぎにギアーB(7)を設けた車輪制御モーター(8)を、ギアーA(6)とギアー(B)をしっかりと噛合わせた形で、オートバイ本体(1)に固定して設ける。一方、前輪側の該回動体にもギアーA(6)を設ける。さらにギアーB(7)を装着した車輪制御モーター(8)をギアー同士噛合わせて、これまたオートバイ本体(1)の適当なる位置に設ける。そして前輪側と後輪側のギアーA(6)の軸に直結して、両端にベアリング軸受(9)を配置して設けたフレーム(10)を設ける。このフレーム(10)はオートバイ本体(1)の骨格として、各部適当なる位置に設けられている。さらに前輪側の該回動体に、ハンドル(11)を固定するハンドル軸受体(12)を設ける。これにハンドル(11)を取付けて設ける。またさらにオートバイ本体(1)の、ハンドル(11)の左右の操舵位置や重心(16)と共にタイヤ車輪(2)の傾きを検知する、ジャイロ角度センサー(5)に連動して配線を施した、モーター制御回路(13)を座席下部等に設ける。さらに各種モーター駆動用の動力用にもなる大容量バッテリー(14)を設ける。また従来のエンジン(17)を搭載したオートバイ本体(1)に、ハイブリットモーター(15)を設けて、モーター制御回路(13)によってエンジン(17)とモーターをコントロールさせた、ハイブリットオートバイにも本発明を採用する。またさらにオートバイ本体(1)の、ハンドル(11)の左右の操舵角度の位置や、重心(16)の位置と共に、タイヤ車輪(2)の傾き具合を検知する、ジャイロ角度センサー(5)に、連動して作動させるために配線を施してなる、モーター制御回路(13)を、座席下部等に設ける。この該回路は図5のフローチャートのごとく、動作する。さらに各種モーター駆動用(ハイブリッドモーター等)の動力用にもなる、大容量バッテリー(14)を設ける事はベストである。
【0011】
本発明は以上のような構成であり、これを使用せんとするときには、まず図5のごとくエンジンキースタートにより、オートバイはエンジンスタートを開始するが、タイヤ車輪(2)の位置が重心中心に無い時には、エンジンが始動しないようになっている。つまりこの時はハンドル(11)が左右にきられた状態で停止しているのである。これを解消するには、ハンドル(11)を真っすぐに修正してやれば、車輪制御モーター(8)が作動してタイヤ車輪(2)が、原点である重心に戻りスタート出来るのである。
【0012】
次ぎにエンジンキーONにすると、エンジンが始動する。走行が始まると、かならずハンドル操作は行われるが、カーブ等の走行でハンドルを左右にきって行くが、この時に遠心力の強さ程度、つまりハンドル角度の強弱や走行速度により、それらを、ジャイロ角度センサー(5)が読み取り、モーター制御回路(13)に信号が流れる。そしてこの信号を読み取り、解析して、前記回路より車輪制御モーター(8)を作動させる。例えば図3、図4のように、カーブ走行している場合は、ハンドル(11)を左右ににきるが、前輪および後輪の車輪制御モーター(8)は、ギアーA(6)と共に回転し、噛合っているギアーB(7)と共に車輪操舵回動体(3)も回転するので、タイヤ車輪(2)は左右に適度に傾くのである。この時ハンドル(11)は、ハンドル軸受体(12)がタイヤ車輪(2)の傾きを、ベアリングが回転して逃がすのて、ハンドル(11)は傾斜方向には動かず、オートバイ本体(1)と共に水平を保ちハンドル操作での左右の動きだけ出来る構造になっている。この動きにより、重心(16)も適正に垂直方向にあるので、たとえ強い遠心力が生じても、常に水平状態でオートバイのスムーズなカーブ運転が出来るのである。
【図面の簡単な説明】
【0013】
【図1】 本発明の全体斜視図である。
【図2】 本発明の側面図である。
【図3】 本発明のカーブ走行中の正面図である。
【図4】 本発明のカーブ走行中の背面図である。
【図5】 本発明の動作のフローチャートである。
【符号の説明】
【0014】
1.オートバイ本体
2.タイヤ車輪
3.車輪操舵回動体
4.油圧ダンパー
5.ジャイロ角度センサー
6.ギアーA
7.ギアーB
8.車輪制御モーター
9.ベアリング軸受
10.フレーム
11.ハンドル
12.ハンドル軸受体
13.モーター制御回路
14.大容量バッテリー
15.ハイブリットモーター
16.重心
17.エンジン
【特許請求の範囲】
【請求項1】
オートバイ本体(1)のタイヤ車輪(2)に設けた、油圧ダンパー(4)に直結させて、これに車輪操舵回動体(3)を設ける、この車輪操舵回動体(3)の適当なる位置に、ジャイロ角度センサー(5)を設ける、つぎに後輪側の該回動体に、ギアーA(6)を設け、さらにギアーB(7)を装着した車輪制御モーター(8)をギアー同士噛合わせて、オートバイ本体(1)の適当なる位置に設ける、つぎに前輪側の該回動体にジャイロ角度センサー(5)およびギアーA(6)を設け、さらにギアーB(7)を装着した車輪制御モーター(8)をギアー同士噛合わせて、これまたオートバイ本体(1)の適当なる位置に設ける、そして前輪側と後輪側のギアーA(6)の軸に直結して、両端にベアリング軸受(9)を設けたフレーム(10)を設ける、このフレーム(10)はオートバイ本体(1)の骨格として、各部適当なる位置に設けられている、さらに前輪側の該回動体に、ハンドル(11)を固定するハンドル軸受体(12)を設け、これにハンドル(11)を取付けて設ける、またさらにオートバイ本体(1)の、ハンドル(11)の左右の操舵位置や重心(16)と共にタイヤ車輪(2)の傾きを検知する、ジャイロ角度センサー(5)に連動して配線を施した、モーター制御回路(13)を座席下部等に設ける、さらに各種モーター駆動用の動力用にもなる大容量バッテリー(14)を設ける、
以上の特徴よりなる、重心保持制御付車輪を備えたオートバイ。
【請求項2】
オートバイ本体(1)にハイブリットモーター(15)を設けて、モーター制御回路(13)によって、エンジン(17)とモーターをコントロールさせた、ハイブリットオートバイにした、請求項1記載の重心保持制御付車輪を備えたオートバイ。
【請求項1】
オートバイ本体(1)のタイヤ車輪(2)に設けた、油圧ダンパー(4)に直結させて、これに車輪操舵回動体(3)を設ける、この車輪操舵回動体(3)の適当なる位置に、ジャイロ角度センサー(5)を設ける、つぎに後輪側の該回動体に、ギアーA(6)を設け、さらにギアーB(7)を装着した車輪制御モーター(8)をギアー同士噛合わせて、オートバイ本体(1)の適当なる位置に設ける、つぎに前輪側の該回動体にジャイロ角度センサー(5)およびギアーA(6)を設け、さらにギアーB(7)を装着した車輪制御モーター(8)をギアー同士噛合わせて、これまたオートバイ本体(1)の適当なる位置に設ける、そして前輪側と後輪側のギアーA(6)の軸に直結して、両端にベアリング軸受(9)を設けたフレーム(10)を設ける、このフレーム(10)はオートバイ本体(1)の骨格として、各部適当なる位置に設けられている、さらに前輪側の該回動体に、ハンドル(11)を固定するハンドル軸受体(12)を設け、これにハンドル(11)を取付けて設ける、またさらにオートバイ本体(1)の、ハンドル(11)の左右の操舵位置や重心(16)と共にタイヤ車輪(2)の傾きを検知する、ジャイロ角度センサー(5)に連動して配線を施した、モーター制御回路(13)を座席下部等に設ける、さらに各種モーター駆動用の動力用にもなる大容量バッテリー(14)を設ける、
以上の特徴よりなる、重心保持制御付車輪を備えたオートバイ。
【請求項2】
オートバイ本体(1)にハイブリットモーター(15)を設けて、モーター制御回路(13)によって、エンジン(17)とモーターをコントロールさせた、ハイブリットオートバイにした、請求項1記載の重心保持制御付車輪を備えたオートバイ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−111153(P2011−111153A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−285666(P2009−285666)
【出願日】平成21年11月26日(2009.11.26)
【出願人】(591085248)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月26日(2009.11.26)
【出願人】(591085248)
【Fターム(参考)】
[ Back to top ]