
重心決定

【課題】三次元物体の重心を決定する方法を提供する。
【解決手段】第一の方向付けで検査プラットフォームに物体を位置付けるステップ615、物体が第一の方向付けにあるときに第一の軸及び第二の軸に沿って重心の位置を決定するステップ620、第一の軸及び第二の軸に直交する第三の軸に対して物体を回転させるステップ625、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置を決定するステップ630、及び物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して第三の軸に沿った重心の位置を決定するステップ635を含む。
【解決手段】第一の方向付けで検査プラットフォームに物体を位置付けるステップ615、物体が第一の方向付けにあるときに第一の軸及び第二の軸に沿って重心の位置を決定するステップ620、第一の軸及び第二の軸に直交する第三の軸に対して物体を回転させるステップ625、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置を決定するステップ630、及び物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して第三の軸に沿った重心の位置を決定するステップ635を含む。
【発明の詳細な説明】
【背景技術】
【0001】
本開示は、物体の検査及び評価、並びに検査及び評価に基づく物体の重心を決定するシステム及び方法に関する。種々のアプリケーションが、不規則な形状、体積及び質量を有する物体の重心を決定する機能から利益を享受できる。航空宇宙産業からの一の典型的なアプリケーションは、完成した航空機、そのモデル、又はそのコンポーネントなどの物体が、パイロンに取り付けられ、レーダー検査圃に配置されるレーダー断面検査に関する。パイロンで物体のバランスを保つために、物体の重心がパイロンを通って延びる縦軸に隣接して位置付けられるように物体を配置することが有益である。それゆえ、検査物体の重心を決定するシステム及び方法は、実用的である。
【発明の概要】
【課題を解決するための手段】
【0002】
種々の態様では、装置の重心を決定するシステム及び方法が提供される。幾つかの実施形態では、ここで述べられるようなシステム及び方法は、物体が第一の方向付けで位置付けられるときに、初めに検査物体の重心を二の軸に配置する。物体は、次いで、第二の方向付けにおいて第三の軸に対して回転し、重心が二の軸の少なくとも一で決定される。第一の方向付けと第二の方向付けとの間の重心の変更が使用され、第三の軸に沿って重心が決定される。典型的なシステムにおいて、第一及び第二の軸はX及びY軸とされ、且つ、第三の軸はZ軸とされる。
【0003】
ゆえに、一の実施形態では、第一の方向付けで検査プラットフォームに物体を位置付けるステップ、物体が第一の方向付けにあるときに、第一の軸及び第二の軸に沿って重心の位置を決定するステップ、第一の軸及び第二の軸に実質的に直交する第三の軸に対して、物体を回転させるステップ、物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置を決定するステップ、及び物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して、第三の軸に沿った重心の位置を決定するステップを含む、三次元物体の重心を決定する方法が提供される。
【0004】
別の実施形態では、フレーム、及びフレームに結合され且つ物体が取り付けられた検査プラットフォームを備える、三次元物体の重心を決定するシステムが提供される。幾つかの実施形態では、検査プラットフォームは、物体が第一の方向付けにある場合の第一の位置と物体が第二の方向付けにある場合の第二の位置との間の軸の周囲でフレームに対して回転可能である。システムは、検査プラットフォームに結合され、検査プラットフォームに位置づけられる物体に関するマスデータを収集する少なくとも三のロードセル、及び少なくとも三のロードセルに結合されたコンピュータベースの処理装置をさらに備える。
【0005】
コンピュータベースの処理装置は、処理装置により実行される際に、物体が第一の方向付けで検査プラットフォームに位置付けられるときに少なくとも三のロードセルから第一のデータセットを受信し、物体が第一の方向付けにあるときに第一の軸及び第二の軸に沿って重心の位置を決定し、物体が第二の方向付けで検査プラットフォームに位置付けられるときに少なくとも三のロードセルから第二のデータセットを受信し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置を決定し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して第三の軸に沿って重心の位置を決定するように処理装置を構成する、固定のコンピュータ可読媒体に記憶される論理命令を含む。
【0006】
別の実施形態では、固定のメモリモジュール、メモリに結合されたコンピュータベースの処理装置、及び処理装置により実行される際に、第一の方向付で物体を保持する検査プラットフォームに結合された少なくとも三のロードセルから第一のデータセットを受信し、物体が第一の方向付けにあるときに三次元空間で第一の軸及び第二の軸に沿って重心の位置を決定し、物体が第二の方向付けで検査プラットフォームに位置付けられるときに少なくとも三のロードセルから第二のデータセットを受信し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置を決定し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して第三の軸に沿って重心の位置を決定するための処理装置を構成する、固定のメモリモジュールに記憶された論理命令を含む三次元物体の重心を決定するコンピュータベースのシステムが提供される。
【0007】
ここで述べられるフィーチャー、機能及び利点は、本発明の種々の実施形態において単独で達成可能であり、また、以下の説明及び図面を参照してさらなる詳細が理解される、別の実施形態においても組み合わせが可能である。
【0008】
図面を参照しながら、詳細な説明について述べられる。
【図面の簡単な説明】
【0009】
【図1】いつくかの実施形態による、重心決定システムの概略的な斜視図である。
【図2】いつくかの実施形態による、重心決定システムの概略的な斜視図である。
【図3】いつくかの実施形態による、重心決定システムの概略的な上面図である。
【図4A】いつくかの実施形態による、重心決定システムの概略的な側面図である。
【図4B】いつくかの実施形態による、重心決定システムの概略的な側面図である。
【図5】本実施形態による、重心決定システムの一部が実施されるコンピュータシステムの概略図である。
【図6】本実施例による、重心決定方法のフローチャート工程である。
【図7】本実施形態による、重心決定の幾何モデルの概略図である。
【発明を実施するための形態】
【0010】
重心を決定するための典型的なシステム及び方法がここで述べられる。以下の説明では、種々の実施形態の完全な理解を促すために、多数の特定の詳細事項が説明される。しかしながら、詳細情報がなくても種々の実施形態が実行可能であることが、当業者には理解されるだろう。他の例では、特定の実施形態が不明瞭にならないように、既知の方法、手順、コンポーネント及びサーキットの図示及び詳細な説明は省略される。
【0011】
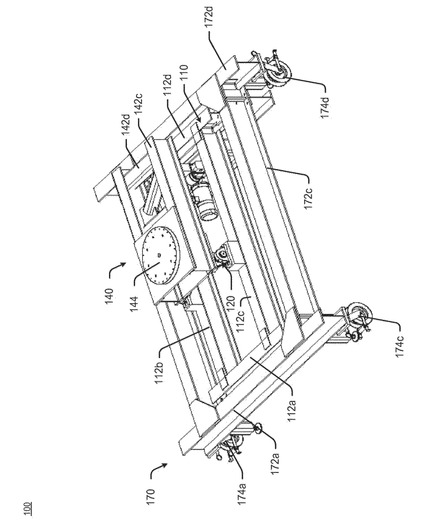
図1及び図2は、幾つかの実施形態による重心決定システムの概略的な斜視図であり、図3は、幾つかの実施形態による重心決定システムの上面図である。図1から図3を参照すると、一の実施形態において、ワイヤー検出システム100は、フレーム110、及びフレーム110に結合され且つ物体が取り付けられた検査プラットフォーム140を備える。検査プラットフォーム140は、物体が第一の方向付けにある場合の第一の位置と物体が第二の方向付けにある場合の第二の位置との間の軸の周囲でフレーム110に対して回転可能である。システム100は、フレーム110に結合され、検査プラットフォーム140に位置付けられた物体に関するマスデータを収集する少なくとも三のロードセル160、及び少なくとも三のロードセルに結合されたコンピュータベースの処理装置180をさらに備える。
【0012】
さらに詳しく述べると、図1から図3で示される実施形態では、フレーム110は、たとえば、スチール、アルミニウムなどの適する材料から作られた四のクロスバー112a、112b、112c及び112dを備える。クロスバー112a、112b、112c及び112dは、ここでは集合的に符号112として表現されることもあるが、接続されて強固な矩形構造を形成する。当業者は、クロスバーが別の幾何学形状を有する他の材料から形成可能であることを認識するだろう。
【0013】
検査プラットフォーム140は、クロスバー114及び116に取り付けられ、ヒンジアセンブリ120により第一の端で、且つホイスト130により対向する端で支持される。ここで述べられる実施形態では、検査プラットフォーム140は、たとえば、スチール、アルミニウムなどの適する材料で作られた四のクロスバー142a、142b、142c及び142dも備える。クロスバー142a、142b、142c及び142dは、ここでは集合的に符号142として表現されることもあるが、接続されて強固な矩形構造を形成する。当業者は、クロスバーが別の幾何学形状を有する他の材料から形成可能であることを認識するだろう。
【0014】
検査プラットフォーム140は、物体が取り付けられる取り付けパッド144をさらに備える。ここで述べられる実施形態では、取り付けパッドは、クロスバー142b及び142cに取り付けられる実質的に円形構造のスチールパッドである。当業者は、取り付けパッド144が別の幾何学形状を有する他の材料から形成可能であることを認識するだろう。
【0015】
ホイスト130は、クロスバー112dとクロスバー142dとの間に取り付けられ、クロスバー142dを上げ下げする機能を有し、ヒンジアセンブリ120を通って延びるC軸周囲でプラットフォーム140を回転させる。ホイスト130は、水圧ホイスト、電気ホイストなどとして実施することができる。ここで述べられる実施形態では、ホイスト130は、ホイスト130を上げ下げして、フレーム110に対してプラットフォーム140を回転させるモーター132に結合される。
【0016】
複数のロードセル160a、160b、160c及び160dは、集合的に符号160としても述べられるが、フレーム110に結合され、フレーム110に位置付けられるロードからのデータを収集する。一の実施形態では、四のロードセルは、フレーム110に取り付けられる。ロードセル160a、160b及び160cは、図1で見ることができる。ロードセル160dは、図1の斜視図においてプラットフォーム140の背後にあるため、見ることができない。ロードセル160は、ロードセルに印加される力に比例する出力を生成する。ロードセル160からの出力は、増幅され、又は別の方法で処理され、コンピュータベースの処理装置180に入力される。
【0017】
図2及び図3を参照すると、幾つかの実施形態では、フレーム110は、システム全体が可動式となるように、カート170に取り付けられる。カート170は、たとえば、スチール、アルミニウムなどの適する材料から作られる四のクロスバー172a、172b、172c及び172dを備える。クロスバー172a、172b、172c及び172dは、ここでは集合的に符号172として表現されることもあるが、接続されて強固な矩形構造を形成する。当業者は、クロスバーが別の幾何学形状を有する他の材料から形成可能であることを認識するだろう。カート170は、ここでは集合的に符号174として表現されることもあり且つ地面に基盤を置くように適合される車輪174a、174b、174c及び174dに取り付けられる。
【0018】
座標システムは、プラットフォーム140を取り囲む三次元空間上でマッピングされる。一の実施形態では、デカルトの座標システムは、X軸がクロスバー112cと実質的に平行な方向に延び、Y軸がクロスバー112aと実質的に平行であり、Z軸がX軸及びY軸によって定められる平面に対して実質的に直交する状態で、空間をマッピングするために使用される。アプリケーションによっては、X軸及びY軸によって定められる平面は、プラットフォーム140が基礎を置く地面に平行又は実質的に平行であることが好ましい。他の実施形態では、座標システムの原点は、ロードセル160bに位置付けられる。当業者は、特定の座標システムが本発明に対して必須ではないこと、空間はたとえば極座標などの別の座標システムを使用してマッピングできること、及び、座標システムの方向は回転可能又は変換可能であることを認識するだろう。
【0019】
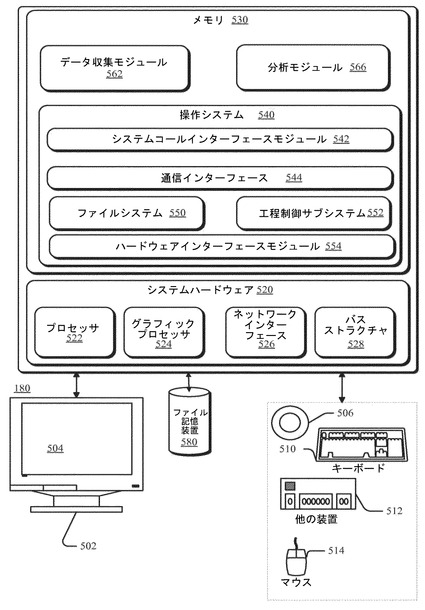
図5は、ここで述べられる一又は複数の実施形態による、重心決定を実施するために適用されるコンピュータシステム180の概略図である。図5を参照すると、一の実施形態では、システム180は、スクリーン504を有するディスプレー502を備える一又は複数の付随入力/出力装置、一又は複数のスピーカー506、キーボード510、一又は複数の他のI/O装置512、及びマウス514を備える。他のI/O装置512は、タッチスクリーン、音声起動入力装置、トラックボール、及びシステム180がユーザからの入力を受信できる任意の他の装置を備えることができる。
【0020】
システム180は、システムハードウェア520、及びランダムアクセスメモリ及び/又は読み取り専用メモリとして実施可能なメモリ530を備える。ファイル記憶装置580は、システム180と通信可能に結合される。ファイル記憶装置580は、一又は複数のハードドライブ、CD−ROMドライブ、DVD−ROMドライブ、又は他の種類の記憶装置など、コンピュータ装置508の内部にあるものとする。ファイル記憶装置580は、一又は複数の外付けハードドライブ、ネットワーク接続記憶装置、又は別個の記憶ネットワークなど、コンピュータ装置508の外部にあるものとしてもよい。
【0021】
システムハードウェア520は、一又は複数のプロセッサ522、少なくとも二のグラフィックプロセッサ524、ネットワークインターフェース526、及びバスストラクチャ528を備えることができる。一の実施形態では、プロセッサ522は、米国カリフォルニア州サンタクララのインテル株式会社から市販されているIntel(登録商標)Core2Duo(登録商標)プロセッサとして実施することができる。ここで使用されるように、「プロセッサ」という言葉は、たとえば、限定はされないが、マイクロプロセッサ、マイクロコントローラー、複数命令セットコンピューター(CISC)マイクロプロセッサ、縮小命令セット(RISC)マイクロプロセッサ、超長命令語(VLIW)マイクロプロセッサ、又は任意の他のプロセッサ又はプロセッサ回路など、任意の計算要素を意味する。
【0022】
グラフィックプロセッサ524は、グラフィック及び/又はビデオ操作を管理する付属プロセッサとしても機能可能である。グラフィックプロセッサ524は、コンピュータシステム500のマザーボードに統合してもよく、又は、拡張スロットを介してマザーボードに結合してもよい。
【0023】
一の実施形態では、ネットワークインターフェース526は、イーサネットインターフェース(たとえば、Institute of Electrical and Electronics Engineers/IEEE802.3-2002を参照)などの有線インターフェース、又はIEEE802.11a,b又はg−compliantインターフェース(たとえば、IEEE Standard for IT−Telecommunications and information exchange between systems LAN/MAN--Part II:Wireless LAN Medium Access Control(MAC) and Physical Layer(PHY) specifications Amendment4:Further Higher Data Rate Extension in the 2.4GHz Band,802.11G-2003を参照)などの無線インターフェースとすることができる。無線インターフェースの別の例としては、ジェネラル・パケット・ラジオ・サービス(GPRS)インターフェース(たとえば、Guidelines on GPRS Handset Requirement, Global System for Mobile Communications/GSM Association, Ver.3.0.1,December 2002を参照)とすることができる。
【0024】
バスストラクチャ528は、システムハードウェア128の種々のコンポーネントを接続する。一の実施形態では、バスストラクチャ528は、メモリバス、周辺機器用バス又は外部バス、及び/又は11ビットバス、インダストリスタンダードアーキテクチャ(ISA)、マイクロチャネルアーキテクチャ(MSA)、エクステンディッドISA(EISA)、インテリジェントドライブエレクトロニクス(IDE)、VESAローカルバス(VLB)、ペリフェラルコンポーネントインターコネクト(PCI)、ユニバーサルシリアルバス(USB)、アドバンスグラフィックポート(AGP)、パーソナルコンピュータメモリカードインターナショナルアソシエーションバス(PCMCIA)、及びスモールコンピュータシステムインターフェース(SCSI)を含むがこれらに限定されない任意の種類の入手可能なバスアーキテクチャを使用するローカルバスを含む、一又は複数の種類のバスストラクチャとすることができる。
【0025】
メモリ530は、コンピュータ装置508の操作を管理するための操作システム540を備える。一の実施形態では、操作システム540は、システムハードウェア520にインターフェースを提供するハードウェアインターフェースモジュール554を備える。また、操作システム540は、コンピュータ装置508の操作で使用されるファイルを管理するファイルシステム550、及びコンピュータ装置508での工程実行を管理する工程制御サブシステム552を備えることができる。
【0026】
操作システム540は、リモートソースからデータパケット及び/又はデータストリームを送受信するために、システムハードウェア520と協同して作動することができる一又は複数の通信インターフェースを備える(又は管理する)ことができる。操作システム540は、操作システム540とメモリ530内に存在する一又は複数のアプリケーションモジュールとの間にインターフェースを提供するシステムコールインターフェースモジュール542をさらに備えることができる。操作システム540は、UNIX操作システム又はその任意の派生物(たとえば、Linux,Solarisなど)として、又はWindows(登録商標)brand operating system、又は他の操作システムとして、実施することができる。
【0027】
種々の実施形態では、システム180は、パソコン、ノート型パソコン、パーソナルデジタルアシスタント、携帯電話、エンターテインメント装置、又は別のコンピュータ装置として、実施することができる。
【0028】
一の実施形態では、メモリ530は、機能性をシステム180に伝達するために有形の固定メモリにエンコードされた論理命令として実施される一又は複数の論理モジュールを含む。図5に示される実施形態は、データ収集モジュール562及び分析モジュール566を備える。これらのモジュールにより実施される工程及び操作についての付加的な詳細事項は、以下の図4A、図4B及び図6を参照して述べられる。
【0029】
操作において、システム100は、プラットフォームに取り付けられる物体の三次元空間で重心を決定するために採用される。物体は、形状、体積、密度及び質量分布において不規則なものとする。概要において、一の実施形態では、プラットフォーム140がフレームと実質的に平行な第一の位置にあるときに、物体はプラットフォーム140に位置付けられる。データ収集モジュール562は、ロードセル160からのデータを収集し、分析モジュール566は、ロードセル160から収集されたデータを使用して、X軸及びY軸に沿って重心を決定する。次いで、ホイスト130が起動され、既定の角度範囲の動作で物体を回転させ、これにより、X軸に沿って物体の重心をシフトする。X軸に沿った重心の位置の変更は、次いで、Z軸で物体の重心の位置を決定するために使用される。
【0030】
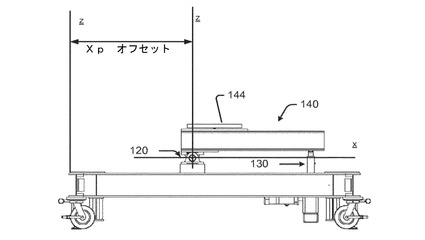
さらに詳細には、図6を参照すると、幾つかの実施形態において、図4Aに示されるようにプラットフォーム140が実質的に平らな方向にあるときには、プラットフォーム140の重心を決定するために、キャリブレーション工程が実施される。例としては、システム100が起動され、データ収集モジュール562は各ロードセル160からフォースデータを収集する。分析モジュール566は、次いで、以下のように、X軸のプラットフォーム140の重心を計算する。

ここで、Lは、ロードセル160aと160bとの間の距離又はロードセル160cと160dとの間の距離であり、Ma、Mb、Mc及びMdは、ロードセル160aから160dまでの各々で測定されたロードを表す。
【0031】
以下の変数が記録される。
Xp_オフセット:原点からヒンジピボットポイント120を通って延びるC軸までのX軸に沿った距離
Zp_オフセット:原点からヒンジピボットポイント120を通って延びるC軸までのZ軸に沿った距離
Za:ヒンジピボットポイント120を通って延びるC軸から付着点144の平面までのZ軸に沿った距離
M_rig:ロードセル160a、160b、160c及び160dの合計に等しい組み立てられた構造100及び140の総重量
X_rig_zero:数式1から計算された0傾斜角で一体化された構造100及び140のX軸に沿った重心
【0032】
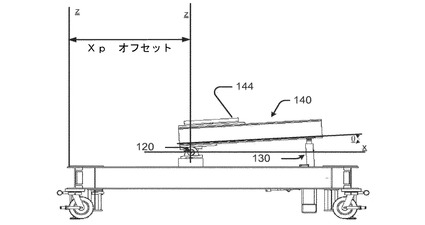
次いで、ホイストが起動され、ヒンジアセンブリ120を通って延びるC軸周囲で既定の角度θだけプラットフォーム140を回転させる。幾つかの実施形態では、10度よりも大きい角度を使用してもよいが、既定の角度θは、1度と10度との間の大きさである。角度θは、傾斜計又は類似の道具を使用して決定される。X軸に沿ったプラットフォーム140の重心は、次いで、上記の数式1を使用して計算される。この結果、既定の回転角度θとX軸の重心、X_rig_angleとの間のマッピングが行われる。このマッピングは、メモリモジュールに記憶される。
【0033】
幾つかの実施形態では、単独の回転角度θが使用される。他の実施形態では、キャリブレーション工程は、既定の角度θの範囲で増加的にプラットフォームを回転させ、各回転角度θでX軸の重心、X_rig_angleを記録する。値は、システム180内のメモリ530のデータテーブル又は他の適するデータ構造、或いはシステム180に結合されたファイル記憶装置580に記憶される。
【0034】
キャリブレーションデータがメモリに記憶されると、システム100は、プラットフォーム140に取り付けられた物体の重心を決定するために使用される。ゆえに、操作615において、プラットフォームが第一の位置にあるときに、物体はプラットフォームに位置付けられる。幾つかの実施形態では、第一の位置は、フレーム110に実質的に平行に位置付けられているプラットフォーム(すなわち、0度の回転角度θ)に対応する。モデルの質量は、以下により決定される。
ここで、mmodelは、プラットフォーム140に取り付けられた物体の質量を表し、mtotは、ロードセル160により測定される合計質量を表し、且つ、mrigは、キャリブレーション工程中にロードセル160により測定されるプラットフォーム140の質量を表す。
【0035】
次いで、操作620では、ヒンジアセンブリ120を通って延びるC軸により定められるピボットポイントに対する物体のX軸の重心は、以下の方程式を使用して計算することができる。
ここで、Xmzeroは、プラットフォームが回転しないとき(すなわち、回転角度0度)の物体のX軸の重心を表し、Xtotzeroは、プラットフォームが回転しないとき(すなわち、回転角度0度)の物体及びプラットフォームのX軸の重心を表し、且つ、Xrigzeroは、プラットフォームが回転しないとき(すなわち回転角度0度)のプラットフォームのX軸の重心を表す。
【0036】
操作625では、ホイストアセンブリを起動することにより、物体は第二の方向付けまで回転し、操作610でプラットフォーム140がキャリブレーティングされた既定の回転角度θで、プラットフォーム140が、ヒンジアセンブリ120を通って延びるC軸周囲で回転する。
【0037】
操作630では、ピボットポイントに対する物体の重心が、次いで、以下の方程式を使用して計算される。
ここで、Xmangleは、プラットフォームが回転角度θ度で回転するときの物体のX軸の重心を表し、Xtotangleは、プラットフォームが回転角度θ度で回転するときの物体及びプラットフォームのX軸の重心を表し、且つ、Xrigangleは、プラットフォームが回転角度θ度で回転するときのプラットフォームのX軸の重心を表す。
【0038】
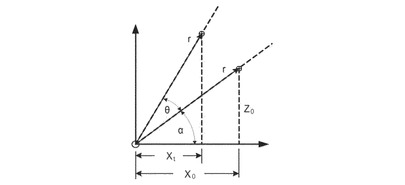
操作635で、X軸の重心の変更が使用され、X軸及びY軸により定められる平面に実質的に直交するZ軸に沿って物体の重心を決定する。図7は、本実施形態による、重心決定の幾何モデルの概略図である。図7を参照すると、幾つかの実施形態において、Z軸における重心が、以下の方程式を使用して決定される。
ここで、Zcgattachは、プラットフォームの付着点に対して測定される物体のZ軸の重心を表し、X0は、プラットフォーム140が初期の位置にあるとき、すなわち、回転角度0度で配置されるときの物体のX軸の重心を表し、Xtは、プラットフォーム140が第二の位置にあるとき、すなわち回転角度θで配置される時のX軸の重心を表す。幾つかの実施形態では、付着点は、ヒンジアセンブリ120を通って延びるC軸により定められるピボットポイントから、Z軸に沿って距離aだけ移動される。ゆえに、Zaとい表現は、Z軸に沿ったピボットポイントからの付着点の移動を表す。
【0039】
図7に示されるモデルは、付着点で位置付けられる座標システムを使用して、Z軸の重心を計算する。幾つかの実施形態では、図3、図4A及び図4Bで示されるように、プラットフォームのエッジから測定される基準位置に座標システムを変換することは有益である。この座標システムにおいて、X軸は、図4A及び図4BのXpオフセットにより表される、X軸に沿ったピボットオフセットを表す量だけ変換される。
【0040】
この座標システムでは、第一の位置に方向付けられる、すなわち、回転角度0度で配置される、物体のX軸の重心は、次のように決定される。
ここで、Xmzero_pointは、ピボットポイント周囲に中心を置く座標システムにおけるX軸の重心を表し、Xmzeroは、プラットフォームのエッジから測定される座標システムにおけるX軸の重心を表し、且つ、Xpoffsetは、その二つの間のX軸のオフセットを表す。同様に、第二の位置に方向付けられる、すなわち、回転角度θ度で配置される物体のX軸の重心は、次のように決定される。
ここで、Xmangle_pointは、ピボットポイント周囲に中心を置く座標システムにおけるX軸の重心を表し、Xmangleは、プラットフォームのエッジから測定される座標システムにおけるX軸の重心を表し、且つ、Xpoffsetは、その二つの間のX軸のオフセットを表す。この座標システムでは、Z軸における重心は、以下のように計算される。
物体の重心の(X、Y、Z)座標は、コンピュータシステム180のメモリ530又はファイル記憶装置580などのメモリモジュールに記憶される。幾つかの実施形態では、座標は、レーダー断面検査で使用されるパイロンなどの装置に物体が取り付けられるその後の工程で使用される。
【0041】
本明細書及び図面では、第一の方向付けで検査プラットフォーム140に物体を位置付けるステップ、物体が第一の方向付けにあるときに第一の軸及び第二の軸に沿って重心の位置を決定するステップ、第一の軸及び第二の軸に実質的に直交する第三の軸に対して物体を回転させ第二の方向付けで物体を位置付けるステップ、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置を決定するステップ、及び物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して第三の軸に沿って重心の位置を決定するステップを含む、三次元物体の重心を決定するための方法が開示される。一の変形例では、方法において、第一の方向付けで検査プラットフォーム140に物体を位置付けるステップは、地面と実質的に平行に方向付けられる検査プラットフォーム140に物体を位置付けるステップを含む。
【0042】
さらに別の変形例では、方法において、第一の方向付けで検査プラットフォーム140に物体を位置付けるステップは、地面に対してある角度で方向付けられる検査プラットフォーム140に物体を位置付けるステップを含む。さらに別の変形例では、方法において、物体が第一の方向付けにあるときに、第一の軸及び第二の軸に沿って重心の位置を決定するステップは、検査プラットフォーム140に結合された少なくとも三のロードセル160から入力を受信するステップ、及び物体が第一の方向付けにあるときに、少なくとも三のロードセル160からの入力を使用して、第一の軸と実質的に平行なX軸及び第二の軸と実質的に平行なY軸に沿って、物体の重心の位置を決定するステップを含む。
【0043】
別の変形例では、方法において、第一の軸及び第二の軸と実質的に直交する第三の軸に対して物体を回転させるステップは、2度と15度との間の既定の角度で、第一の軸と実質的に平行なX軸と実質的に平行な、C軸周辺で物体を回転させるステップを含む。さらに別の変形例では、方法において、物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して、第三の軸に沿った重心の位置を決定するステップは、X軸と実質的に平行な、C軸から測定されたZ軸の重心を計算するステップを含み、Z軸は第三の軸と実質的に平行であり、且つX軸は第一の軸と実質的に平行であることを特徴とする。
【0044】
別の実施形態では、方法は、キャリブレーション工程を実施して第一の方向付け及び第二の方向付けで三次元空間のプラットフォームの重心を決定するステップ、及び物体の重心の位置を調整して、プラットフォーム140の重心を補正するステップをさらに含む。
【0045】
一の態様では、フレーム110、フレーム110に結合され且つ物体が取り付けられる検査プラットフォーム140であって、検査プラットフォーム140は、物体が第一の方向付けにある場合の第一の位置と物体が第二の方向付けにある場合の第二の位置との間の第一、第二及び第三の軸の周囲でフレーム110に対して回転可能であり、第三の軸は第一及び第二の軸と実質的に直交することを特徴とする検査プラットフォーム、フレーム110に結合され且つ検査プラットフォーム140に位置付けられる物体に関するマスデータを収集する少なくとも三のロードセル160、及び少なくとも三のロードセル160に結合され、且つ処理装置180により実行されるときに、処理装置180を構成する固定コンピュータ可読媒体に記憶される論理命令を含むコンピュータベースの処理装置180を備える、三次元物体の重心を決定するシステムが開示される。
【0046】
処理装置180は、第一の方向付けで検査プラットフォーム140に物体が位置付けられるときに少なくとも三のロードセル160から第一のデータセットを受信し、物体が第一の方向付けにあるときに第一の軸及び第二の軸に沿って重心の位置を決定し、物体が第三の軸周囲を回転し且つ第二の方向付けで検査プラットフォーム140に位置付けられるときに少なくとも三のロードセル160から第二のデータセットを受信し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置を決定し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して第三の軸に沿って重心の位置を決定するように、構成される。一の例では、システムにおいて、検査プラットフォーム140が地面と実質的に平行に方向付けられるときに、第一の方向付けは、検査プラットフォーム140に物体を位置付けることを特徴とする。さらに別の例では、システムにおいて、地面に対して検査プラットフォーム140がある角度で方向付けられるときに、第一の方向付けは物体を検査プラットフォーム140に位置付けることを特徴とする。
【0047】
さらに別の例では、システムにおいて、コンピュータベースの処理装置180は、処理装置180により実行されるときに、検査プラットフォーム140に結合された少なくとも三のロードセル160から入力を受信し、物体が第一の方向付けにあるときに、少なくとも三のロードセル160からの入力を使用してX軸及びY軸に沿って物体の重心の位置を決定するように、処理装置180を構成する固定コンピュータ可読媒体に記憶された論理命令をさらに含むことを特徴とする。
【0048】
一の変形例では、システムにおいて、物体は、2度と15度との間の既定の角度で、Z軸に対して回転することを特徴とする。さらに別の変形例では、システムにおいて、コンピュータベースの処理装置180は、処理装置180により実行されるときに、第一の軸と実質的に平行であるX軸と実質的に平行な、C軸から測定されるZ軸の重心を計算するように、処理装置180を構成する固定コンピュータ可読媒体に記憶される論理命令をさらに備えることを特徴とする。さらに別の例では、システムにおいて、コンピュータベース処理装置180は、処理装置180により実行されるときに、キャリブレーション工程を実施して、第一の方向付け及び第二の方向付けで三次元空間にプラットフォームの重心を決定し、物体の重心の位置を調整してプラットフォームの重心を補正するように、処理装置180を構成する固定コンピュータ可読媒体に記憶された論理命令をさらに含むことを特徴とする。
【0049】
さらに別の態様では、固定のメモリモジュール、メモリに結合されたコンピュータベースの処理装置180、及び処理装置180により実行されるときに、第一の方向付けで物体を保持する検査プラットフォーム140に結合された少なくとも三のロードセル160から第一のデータセットを受信し、物体が第一の方向付けにあるときに三次元空間で第一の軸及び第二の軸に沿って重心の位置を決定し、物体が第一及び第二の軸と実質的に直交する第三の軸の周囲で回転し且つ第一の方向付けとは異なる第二の方向付けでの検査プラットフォーム140に位置付けられるときに少なくとも三のロードセルから第二のデータセットを受信し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置を決定し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して第三の軸に沿って重心の位置を決定するように、処理装置180を構成する固定メモリモジュールに記憶された論理命令を含む、三次元物体の重心を決定するコンピュータベースのシステムが開示される。さらに別の例では、コンピュータベースのシステムにおいて、検査プラットフォーム140が地面と実質的に平行に方向付けられるときに、第一の方向付けは、検査プラットフォーム140に物体を位置付けることを特徴とする。さらに別の例では、コンピュータベースのシステムは、検査プラットフォーム140が地面に対してある角度で方向付けられるときに、第一の方向付けは、検査プラットフォーム140に物体を位置付けることを特徴とする。
【0050】
さらに別の変形例では、コンピュータベースのシステムは、処理装置180により実行されるときに、検査プラットフォーム140に結合された少なくとも三のロードセル160から入力を受信し、物体が第一の方向付けにあるときに、少なくとも三のロードセル160からの入力を使用してX軸及びY軸に沿って物体の重心の位置を決定するように、処理装置180を構成する論理命令をさらに含む。一の変形例では、コンピュータベースのシステムは、2度と15度との間の既定の角度で、Z軸に対して物体を回転させることを特徴とする。一の変形例では、コンピュータベースのシステムは、処理装置180により実行されるときに、第一の軸と実質的に平行であるX軸と実質的に平行な、C軸から測定されるZ軸の重心を計算するように、処理装置180を構成する論理命令をさらに備える。さらに別の変形例では、コンピュータベースのシステムは、処理装置180により実行されるときに、キャリブレーション工程を実施して、第一の方向付け及び第二の方向付けで三次元空間に検査プラットフォーム140の重心を決定し、物体の重心の位置を調整して検査プラットフォーム140の重心を補正するように、処理装置180を構成する論理命令をさらに含む。
【0051】
それゆえ、ここで述べられるように、物体の重心を決定するシステムは、物体が第一の方向付けでプラットフォームに配置されるときに、X−Y平面に重心を決定する。
【0052】
本明細書中の「一の実施形態」又は「幾つかの実施形態」への言及は、実施形態に関連して述べられる特定のフィーチャー、構造、又は特性が少なくとも実施に含まれることを意味する。明細書中の種々の箇所に見られる「一の実施形態において(では)」という表現は、同じ実施形態に言及していてもよく、又は、すべてが同じ実施形態に言及していなくてもよい。
【0053】
実施形態は、構造的なフィーチャー及び/又は方法論的行為に対して特定の言語で述べられているが、主張される主題は、上述の特定のフィーチャー又は行為に限定されなくてもよいと理解されるべきである。むしろ、特定のフィーチャー及び行為は、主張される主題を実施する例示的な形態として開示される。
【背景技術】
【0001】
本開示は、物体の検査及び評価、並びに検査及び評価に基づく物体の重心を決定するシステム及び方法に関する。種々のアプリケーションが、不規則な形状、体積及び質量を有する物体の重心を決定する機能から利益を享受できる。航空宇宙産業からの一の典型的なアプリケーションは、完成した航空機、そのモデル、又はそのコンポーネントなどの物体が、パイロンに取り付けられ、レーダー検査圃に配置されるレーダー断面検査に関する。パイロンで物体のバランスを保つために、物体の重心がパイロンを通って延びる縦軸に隣接して位置付けられるように物体を配置することが有益である。それゆえ、検査物体の重心を決定するシステム及び方法は、実用的である。
【発明の概要】
【課題を解決するための手段】
【0002】
種々の態様では、装置の重心を決定するシステム及び方法が提供される。幾つかの実施形態では、ここで述べられるようなシステム及び方法は、物体が第一の方向付けで位置付けられるときに、初めに検査物体の重心を二の軸に配置する。物体は、次いで、第二の方向付けにおいて第三の軸に対して回転し、重心が二の軸の少なくとも一で決定される。第一の方向付けと第二の方向付けとの間の重心の変更が使用され、第三の軸に沿って重心が決定される。典型的なシステムにおいて、第一及び第二の軸はX及びY軸とされ、且つ、第三の軸はZ軸とされる。
【0003】
ゆえに、一の実施形態では、第一の方向付けで検査プラットフォームに物体を位置付けるステップ、物体が第一の方向付けにあるときに、第一の軸及び第二の軸に沿って重心の位置を決定するステップ、第一の軸及び第二の軸に実質的に直交する第三の軸に対して、物体を回転させるステップ、物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置を決定するステップ、及び物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して、第三の軸に沿った重心の位置を決定するステップを含む、三次元物体の重心を決定する方法が提供される。
【0004】
別の実施形態では、フレーム、及びフレームに結合され且つ物体が取り付けられた検査プラットフォームを備える、三次元物体の重心を決定するシステムが提供される。幾つかの実施形態では、検査プラットフォームは、物体が第一の方向付けにある場合の第一の位置と物体が第二の方向付けにある場合の第二の位置との間の軸の周囲でフレームに対して回転可能である。システムは、検査プラットフォームに結合され、検査プラットフォームに位置づけられる物体に関するマスデータを収集する少なくとも三のロードセル、及び少なくとも三のロードセルに結合されたコンピュータベースの処理装置をさらに備える。
【0005】
コンピュータベースの処理装置は、処理装置により実行される際に、物体が第一の方向付けで検査プラットフォームに位置付けられるときに少なくとも三のロードセルから第一のデータセットを受信し、物体が第一の方向付けにあるときに第一の軸及び第二の軸に沿って重心の位置を決定し、物体が第二の方向付けで検査プラットフォームに位置付けられるときに少なくとも三のロードセルから第二のデータセットを受信し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置を決定し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して第三の軸に沿って重心の位置を決定するように処理装置を構成する、固定のコンピュータ可読媒体に記憶される論理命令を含む。
【0006】
別の実施形態では、固定のメモリモジュール、メモリに結合されたコンピュータベースの処理装置、及び処理装置により実行される際に、第一の方向付で物体を保持する検査プラットフォームに結合された少なくとも三のロードセルから第一のデータセットを受信し、物体が第一の方向付けにあるときに三次元空間で第一の軸及び第二の軸に沿って重心の位置を決定し、物体が第二の方向付けで検査プラットフォームに位置付けられるときに少なくとも三のロードセルから第二のデータセットを受信し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置を決定し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して第三の軸に沿って重心の位置を決定するための処理装置を構成する、固定のメモリモジュールに記憶された論理命令を含む三次元物体の重心を決定するコンピュータベースのシステムが提供される。
【0007】
ここで述べられるフィーチャー、機能及び利点は、本発明の種々の実施形態において単独で達成可能であり、また、以下の説明及び図面を参照してさらなる詳細が理解される、別の実施形態においても組み合わせが可能である。
【0008】
図面を参照しながら、詳細な説明について述べられる。
【図面の簡単な説明】
【0009】
【図1】いつくかの実施形態による、重心決定システムの概略的な斜視図である。
【図2】いつくかの実施形態による、重心決定システムの概略的な斜視図である。
【図3】いつくかの実施形態による、重心決定システムの概略的な上面図である。
【図4A】いつくかの実施形態による、重心決定システムの概略的な側面図である。
【図4B】いつくかの実施形態による、重心決定システムの概略的な側面図である。
【図5】本実施形態による、重心決定システムの一部が実施されるコンピュータシステムの概略図である。
【図6】本実施例による、重心決定方法のフローチャート工程である。
【図7】本実施形態による、重心決定の幾何モデルの概略図である。
【発明を実施するための形態】
【0010】
重心を決定するための典型的なシステム及び方法がここで述べられる。以下の説明では、種々の実施形態の完全な理解を促すために、多数の特定の詳細事項が説明される。しかしながら、詳細情報がなくても種々の実施形態が実行可能であることが、当業者には理解されるだろう。他の例では、特定の実施形態が不明瞭にならないように、既知の方法、手順、コンポーネント及びサーキットの図示及び詳細な説明は省略される。
【0011】
図1及び図2は、幾つかの実施形態による重心決定システムの概略的な斜視図であり、図3は、幾つかの実施形態による重心決定システムの上面図である。図1から図3を参照すると、一の実施形態において、ワイヤー検出システム100は、フレーム110、及びフレーム110に結合され且つ物体が取り付けられた検査プラットフォーム140を備える。検査プラットフォーム140は、物体が第一の方向付けにある場合の第一の位置と物体が第二の方向付けにある場合の第二の位置との間の軸の周囲でフレーム110に対して回転可能である。システム100は、フレーム110に結合され、検査プラットフォーム140に位置付けられた物体に関するマスデータを収集する少なくとも三のロードセル160、及び少なくとも三のロードセルに結合されたコンピュータベースの処理装置180をさらに備える。
【0012】
さらに詳しく述べると、図1から図3で示される実施形態では、フレーム110は、たとえば、スチール、アルミニウムなどの適する材料から作られた四のクロスバー112a、112b、112c及び112dを備える。クロスバー112a、112b、112c及び112dは、ここでは集合的に符号112として表現されることもあるが、接続されて強固な矩形構造を形成する。当業者は、クロスバーが別の幾何学形状を有する他の材料から形成可能であることを認識するだろう。
【0013】
検査プラットフォーム140は、クロスバー114及び116に取り付けられ、ヒンジアセンブリ120により第一の端で、且つホイスト130により対向する端で支持される。ここで述べられる実施形態では、検査プラットフォーム140は、たとえば、スチール、アルミニウムなどの適する材料で作られた四のクロスバー142a、142b、142c及び142dも備える。クロスバー142a、142b、142c及び142dは、ここでは集合的に符号142として表現されることもあるが、接続されて強固な矩形構造を形成する。当業者は、クロスバーが別の幾何学形状を有する他の材料から形成可能であることを認識するだろう。
【0014】
検査プラットフォーム140は、物体が取り付けられる取り付けパッド144をさらに備える。ここで述べられる実施形態では、取り付けパッドは、クロスバー142b及び142cに取り付けられる実質的に円形構造のスチールパッドである。当業者は、取り付けパッド144が別の幾何学形状を有する他の材料から形成可能であることを認識するだろう。
【0015】
ホイスト130は、クロスバー112dとクロスバー142dとの間に取り付けられ、クロスバー142dを上げ下げする機能を有し、ヒンジアセンブリ120を通って延びるC軸周囲でプラットフォーム140を回転させる。ホイスト130は、水圧ホイスト、電気ホイストなどとして実施することができる。ここで述べられる実施形態では、ホイスト130は、ホイスト130を上げ下げして、フレーム110に対してプラットフォーム140を回転させるモーター132に結合される。
【0016】
複数のロードセル160a、160b、160c及び160dは、集合的に符号160としても述べられるが、フレーム110に結合され、フレーム110に位置付けられるロードからのデータを収集する。一の実施形態では、四のロードセルは、フレーム110に取り付けられる。ロードセル160a、160b及び160cは、図1で見ることができる。ロードセル160dは、図1の斜視図においてプラットフォーム140の背後にあるため、見ることができない。ロードセル160は、ロードセルに印加される力に比例する出力を生成する。ロードセル160からの出力は、増幅され、又は別の方法で処理され、コンピュータベースの処理装置180に入力される。
【0017】
図2及び図3を参照すると、幾つかの実施形態では、フレーム110は、システム全体が可動式となるように、カート170に取り付けられる。カート170は、たとえば、スチール、アルミニウムなどの適する材料から作られる四のクロスバー172a、172b、172c及び172dを備える。クロスバー172a、172b、172c及び172dは、ここでは集合的に符号172として表現されることもあるが、接続されて強固な矩形構造を形成する。当業者は、クロスバーが別の幾何学形状を有する他の材料から形成可能であることを認識するだろう。カート170は、ここでは集合的に符号174として表現されることもあり且つ地面に基盤を置くように適合される車輪174a、174b、174c及び174dに取り付けられる。
【0018】
座標システムは、プラットフォーム140を取り囲む三次元空間上でマッピングされる。一の実施形態では、デカルトの座標システムは、X軸がクロスバー112cと実質的に平行な方向に延び、Y軸がクロスバー112aと実質的に平行であり、Z軸がX軸及びY軸によって定められる平面に対して実質的に直交する状態で、空間をマッピングするために使用される。アプリケーションによっては、X軸及びY軸によって定められる平面は、プラットフォーム140が基礎を置く地面に平行又は実質的に平行であることが好ましい。他の実施形態では、座標システムの原点は、ロードセル160bに位置付けられる。当業者は、特定の座標システムが本発明に対して必須ではないこと、空間はたとえば極座標などの別の座標システムを使用してマッピングできること、及び、座標システムの方向は回転可能又は変換可能であることを認識するだろう。
【0019】
図5は、ここで述べられる一又は複数の実施形態による、重心決定を実施するために適用されるコンピュータシステム180の概略図である。図5を参照すると、一の実施形態では、システム180は、スクリーン504を有するディスプレー502を備える一又は複数の付随入力/出力装置、一又は複数のスピーカー506、キーボード510、一又は複数の他のI/O装置512、及びマウス514を備える。他のI/O装置512は、タッチスクリーン、音声起動入力装置、トラックボール、及びシステム180がユーザからの入力を受信できる任意の他の装置を備えることができる。
【0020】
システム180は、システムハードウェア520、及びランダムアクセスメモリ及び/又は読み取り専用メモリとして実施可能なメモリ530を備える。ファイル記憶装置580は、システム180と通信可能に結合される。ファイル記憶装置580は、一又は複数のハードドライブ、CD−ROMドライブ、DVD−ROMドライブ、又は他の種類の記憶装置など、コンピュータ装置508の内部にあるものとする。ファイル記憶装置580は、一又は複数の外付けハードドライブ、ネットワーク接続記憶装置、又は別個の記憶ネットワークなど、コンピュータ装置508の外部にあるものとしてもよい。
【0021】
システムハードウェア520は、一又は複数のプロセッサ522、少なくとも二のグラフィックプロセッサ524、ネットワークインターフェース526、及びバスストラクチャ528を備えることができる。一の実施形態では、プロセッサ522は、米国カリフォルニア州サンタクララのインテル株式会社から市販されているIntel(登録商標)Core2Duo(登録商標)プロセッサとして実施することができる。ここで使用されるように、「プロセッサ」という言葉は、たとえば、限定はされないが、マイクロプロセッサ、マイクロコントローラー、複数命令セットコンピューター(CISC)マイクロプロセッサ、縮小命令セット(RISC)マイクロプロセッサ、超長命令語(VLIW)マイクロプロセッサ、又は任意の他のプロセッサ又はプロセッサ回路など、任意の計算要素を意味する。
【0022】
グラフィックプロセッサ524は、グラフィック及び/又はビデオ操作を管理する付属プロセッサとしても機能可能である。グラフィックプロセッサ524は、コンピュータシステム500のマザーボードに統合してもよく、又は、拡張スロットを介してマザーボードに結合してもよい。
【0023】
一の実施形態では、ネットワークインターフェース526は、イーサネットインターフェース(たとえば、Institute of Electrical and Electronics Engineers/IEEE802.3-2002を参照)などの有線インターフェース、又はIEEE802.11a,b又はg−compliantインターフェース(たとえば、IEEE Standard for IT−Telecommunications and information exchange between systems LAN/MAN--Part II:Wireless LAN Medium Access Control(MAC) and Physical Layer(PHY) specifications Amendment4:Further Higher Data Rate Extension in the 2.4GHz Band,802.11G-2003を参照)などの無線インターフェースとすることができる。無線インターフェースの別の例としては、ジェネラル・パケット・ラジオ・サービス(GPRS)インターフェース(たとえば、Guidelines on GPRS Handset Requirement, Global System for Mobile Communications/GSM Association, Ver.3.0.1,December 2002を参照)とすることができる。
【0024】
バスストラクチャ528は、システムハードウェア128の種々のコンポーネントを接続する。一の実施形態では、バスストラクチャ528は、メモリバス、周辺機器用バス又は外部バス、及び/又は11ビットバス、インダストリスタンダードアーキテクチャ(ISA)、マイクロチャネルアーキテクチャ(MSA)、エクステンディッドISA(EISA)、インテリジェントドライブエレクトロニクス(IDE)、VESAローカルバス(VLB)、ペリフェラルコンポーネントインターコネクト(PCI)、ユニバーサルシリアルバス(USB)、アドバンスグラフィックポート(AGP)、パーソナルコンピュータメモリカードインターナショナルアソシエーションバス(PCMCIA)、及びスモールコンピュータシステムインターフェース(SCSI)を含むがこれらに限定されない任意の種類の入手可能なバスアーキテクチャを使用するローカルバスを含む、一又は複数の種類のバスストラクチャとすることができる。
【0025】
メモリ530は、コンピュータ装置508の操作を管理するための操作システム540を備える。一の実施形態では、操作システム540は、システムハードウェア520にインターフェースを提供するハードウェアインターフェースモジュール554を備える。また、操作システム540は、コンピュータ装置508の操作で使用されるファイルを管理するファイルシステム550、及びコンピュータ装置508での工程実行を管理する工程制御サブシステム552を備えることができる。
【0026】
操作システム540は、リモートソースからデータパケット及び/又はデータストリームを送受信するために、システムハードウェア520と協同して作動することができる一又は複数の通信インターフェースを備える(又は管理する)ことができる。操作システム540は、操作システム540とメモリ530内に存在する一又は複数のアプリケーションモジュールとの間にインターフェースを提供するシステムコールインターフェースモジュール542をさらに備えることができる。操作システム540は、UNIX操作システム又はその任意の派生物(たとえば、Linux,Solarisなど)として、又はWindows(登録商標)brand operating system、又は他の操作システムとして、実施することができる。
【0027】
種々の実施形態では、システム180は、パソコン、ノート型パソコン、パーソナルデジタルアシスタント、携帯電話、エンターテインメント装置、又は別のコンピュータ装置として、実施することができる。
【0028】
一の実施形態では、メモリ530は、機能性をシステム180に伝達するために有形の固定メモリにエンコードされた論理命令として実施される一又は複数の論理モジュールを含む。図5に示される実施形態は、データ収集モジュール562及び分析モジュール566を備える。これらのモジュールにより実施される工程及び操作についての付加的な詳細事項は、以下の図4A、図4B及び図6を参照して述べられる。
【0029】
操作において、システム100は、プラットフォームに取り付けられる物体の三次元空間で重心を決定するために採用される。物体は、形状、体積、密度及び質量分布において不規則なものとする。概要において、一の実施形態では、プラットフォーム140がフレームと実質的に平行な第一の位置にあるときに、物体はプラットフォーム140に位置付けられる。データ収集モジュール562は、ロードセル160からのデータを収集し、分析モジュール566は、ロードセル160から収集されたデータを使用して、X軸及びY軸に沿って重心を決定する。次いで、ホイスト130が起動され、既定の角度範囲の動作で物体を回転させ、これにより、X軸に沿って物体の重心をシフトする。X軸に沿った重心の位置の変更は、次いで、Z軸で物体の重心の位置を決定するために使用される。
【0030】
さらに詳細には、図6を参照すると、幾つかの実施形態において、図4Aに示されるようにプラットフォーム140が実質的に平らな方向にあるときには、プラットフォーム140の重心を決定するために、キャリブレーション工程が実施される。例としては、システム100が起動され、データ収集モジュール562は各ロードセル160からフォースデータを収集する。分析モジュール566は、次いで、以下のように、X軸のプラットフォーム140の重心を計算する。
ここで、Lは、ロードセル160aと160bとの間の距離又はロードセル160cと160dとの間の距離であり、Ma、Mb、Mc及びMdは、ロードセル160aから160dまでの各々で測定されたロードを表す。
【0031】
以下の変数が記録される。
Xp_オフセット:原点からヒンジピボットポイント120を通って延びるC軸までのX軸に沿った距離
Zp_オフセット:原点からヒンジピボットポイント120を通って延びるC軸までのZ軸に沿った距離
Za:ヒンジピボットポイント120を通って延びるC軸から付着点144の平面までのZ軸に沿った距離
M_rig:ロードセル160a、160b、160c及び160dの合計に等しい組み立てられた構造100及び140の総重量
X_rig_zero:数式1から計算された0傾斜角で一体化された構造100及び140のX軸に沿った重心
【0032】
次いで、ホイストが起動され、ヒンジアセンブリ120を通って延びるC軸周囲で既定の角度θだけプラットフォーム140を回転させる。幾つかの実施形態では、10度よりも大きい角度を使用してもよいが、既定の角度θは、1度と10度との間の大きさである。角度θは、傾斜計又は類似の道具を使用して決定される。X軸に沿ったプラットフォーム140の重心は、次いで、上記の数式1を使用して計算される。この結果、既定の回転角度θとX軸の重心、X_rig_angleとの間のマッピングが行われる。このマッピングは、メモリモジュールに記憶される。
【0033】
幾つかの実施形態では、単独の回転角度θが使用される。他の実施形態では、キャリブレーション工程は、既定の角度θの範囲で増加的にプラットフォームを回転させ、各回転角度θでX軸の重心、X_rig_angleを記録する。値は、システム180内のメモリ530のデータテーブル又は他の適するデータ構造、或いはシステム180に結合されたファイル記憶装置580に記憶される。
【0034】
キャリブレーションデータがメモリに記憶されると、システム100は、プラットフォーム140に取り付けられた物体の重心を決定するために使用される。ゆえに、操作615において、プラットフォームが第一の位置にあるときに、物体はプラットフォームに位置付けられる。幾つかの実施形態では、第一の位置は、フレーム110に実質的に平行に位置付けられているプラットフォーム(すなわち、0度の回転角度θ)に対応する。モデルの質量は、以下により決定される。
ここで、mmodelは、プラットフォーム140に取り付けられた物体の質量を表し、mtotは、ロードセル160により測定される合計質量を表し、且つ、mrigは、キャリブレーション工程中にロードセル160により測定されるプラットフォーム140の質量を表す。
【0035】
次いで、操作620では、ヒンジアセンブリ120を通って延びるC軸により定められるピボットポイントに対する物体のX軸の重心は、以下の方程式を使用して計算することができる。
ここで、Xmzeroは、プラットフォームが回転しないとき(すなわち、回転角度0度)の物体のX軸の重心を表し、Xtotzeroは、プラットフォームが回転しないとき(すなわち、回転角度0度)の物体及びプラットフォームのX軸の重心を表し、且つ、Xrigzeroは、プラットフォームが回転しないとき(すなわち回転角度0度)のプラットフォームのX軸の重心を表す。
【0036】
操作625では、ホイストアセンブリを起動することにより、物体は第二の方向付けまで回転し、操作610でプラットフォーム140がキャリブレーティングされた既定の回転角度θで、プラットフォーム140が、ヒンジアセンブリ120を通って延びるC軸周囲で回転する。
【0037】
操作630では、ピボットポイントに対する物体の重心が、次いで、以下の方程式を使用して計算される。
ここで、Xmangleは、プラットフォームが回転角度θ度で回転するときの物体のX軸の重心を表し、Xtotangleは、プラットフォームが回転角度θ度で回転するときの物体及びプラットフォームのX軸の重心を表し、且つ、Xrigangleは、プラットフォームが回転角度θ度で回転するときのプラットフォームのX軸の重心を表す。
【0038】
操作635で、X軸の重心の変更が使用され、X軸及びY軸により定められる平面に実質的に直交するZ軸に沿って物体の重心を決定する。図7は、本実施形態による、重心決定の幾何モデルの概略図である。図7を参照すると、幾つかの実施形態において、Z軸における重心が、以下の方程式を使用して決定される。
ここで、Zcgattachは、プラットフォームの付着点に対して測定される物体のZ軸の重心を表し、X0は、プラットフォーム140が初期の位置にあるとき、すなわち、回転角度0度で配置されるときの物体のX軸の重心を表し、Xtは、プラットフォーム140が第二の位置にあるとき、すなわち回転角度θで配置される時のX軸の重心を表す。幾つかの実施形態では、付着点は、ヒンジアセンブリ120を通って延びるC軸により定められるピボットポイントから、Z軸に沿って距離aだけ移動される。ゆえに、Zaとい表現は、Z軸に沿ったピボットポイントからの付着点の移動を表す。
【0039】
図7に示されるモデルは、付着点で位置付けられる座標システムを使用して、Z軸の重心を計算する。幾つかの実施形態では、図3、図4A及び図4Bで示されるように、プラットフォームのエッジから測定される基準位置に座標システムを変換することは有益である。この座標システムにおいて、X軸は、図4A及び図4BのXpオフセットにより表される、X軸に沿ったピボットオフセットを表す量だけ変換される。
【0040】
この座標システムでは、第一の位置に方向付けられる、すなわち、回転角度0度で配置される、物体のX軸の重心は、次のように決定される。
ここで、Xmzero_pointは、ピボットポイント周囲に中心を置く座標システムにおけるX軸の重心を表し、Xmzeroは、プラットフォームのエッジから測定される座標システムにおけるX軸の重心を表し、且つ、Xpoffsetは、その二つの間のX軸のオフセットを表す。同様に、第二の位置に方向付けられる、すなわち、回転角度θ度で配置される物体のX軸の重心は、次のように決定される。
ここで、Xmangle_pointは、ピボットポイント周囲に中心を置く座標システムにおけるX軸の重心を表し、Xmangleは、プラットフォームのエッジから測定される座標システムにおけるX軸の重心を表し、且つ、Xpoffsetは、その二つの間のX軸のオフセットを表す。この座標システムでは、Z軸における重心は、以下のように計算される。
物体の重心の(X、Y、Z)座標は、コンピュータシステム180のメモリ530又はファイル記憶装置580などのメモリモジュールに記憶される。幾つかの実施形態では、座標は、レーダー断面検査で使用されるパイロンなどの装置に物体が取り付けられるその後の工程で使用される。
【0041】
本明細書及び図面では、第一の方向付けで検査プラットフォーム140に物体を位置付けるステップ、物体が第一の方向付けにあるときに第一の軸及び第二の軸に沿って重心の位置を決定するステップ、第一の軸及び第二の軸に実質的に直交する第三の軸に対して物体を回転させ第二の方向付けで物体を位置付けるステップ、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置を決定するステップ、及び物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して第三の軸に沿って重心の位置を決定するステップを含む、三次元物体の重心を決定するための方法が開示される。一の変形例では、方法において、第一の方向付けで検査プラットフォーム140に物体を位置付けるステップは、地面と実質的に平行に方向付けられる検査プラットフォーム140に物体を位置付けるステップを含む。
【0042】
さらに別の変形例では、方法において、第一の方向付けで検査プラットフォーム140に物体を位置付けるステップは、地面に対してある角度で方向付けられる検査プラットフォーム140に物体を位置付けるステップを含む。さらに別の変形例では、方法において、物体が第一の方向付けにあるときに、第一の軸及び第二の軸に沿って重心の位置を決定するステップは、検査プラットフォーム140に結合された少なくとも三のロードセル160から入力を受信するステップ、及び物体が第一の方向付けにあるときに、少なくとも三のロードセル160からの入力を使用して、第一の軸と実質的に平行なX軸及び第二の軸と実質的に平行なY軸に沿って、物体の重心の位置を決定するステップを含む。
【0043】
別の変形例では、方法において、第一の軸及び第二の軸と実質的に直交する第三の軸に対して物体を回転させるステップは、2度と15度との間の既定の角度で、第一の軸と実質的に平行なX軸と実質的に平行な、C軸周辺で物体を回転させるステップを含む。さらに別の変形例では、方法において、物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して、第三の軸に沿った重心の位置を決定するステップは、X軸と実質的に平行な、C軸から測定されたZ軸の重心を計算するステップを含み、Z軸は第三の軸と実質的に平行であり、且つX軸は第一の軸と実質的に平行であることを特徴とする。
【0044】
別の実施形態では、方法は、キャリブレーション工程を実施して第一の方向付け及び第二の方向付けで三次元空間のプラットフォームの重心を決定するステップ、及び物体の重心の位置を調整して、プラットフォーム140の重心を補正するステップをさらに含む。
【0045】
一の態様では、フレーム110、フレーム110に結合され且つ物体が取り付けられる検査プラットフォーム140であって、検査プラットフォーム140は、物体が第一の方向付けにある場合の第一の位置と物体が第二の方向付けにある場合の第二の位置との間の第一、第二及び第三の軸の周囲でフレーム110に対して回転可能であり、第三の軸は第一及び第二の軸と実質的に直交することを特徴とする検査プラットフォーム、フレーム110に結合され且つ検査プラットフォーム140に位置付けられる物体に関するマスデータを収集する少なくとも三のロードセル160、及び少なくとも三のロードセル160に結合され、且つ処理装置180により実行されるときに、処理装置180を構成する固定コンピュータ可読媒体に記憶される論理命令を含むコンピュータベースの処理装置180を備える、三次元物体の重心を決定するシステムが開示される。
【0046】
処理装置180は、第一の方向付けで検査プラットフォーム140に物体が位置付けられるときに少なくとも三のロードセル160から第一のデータセットを受信し、物体が第一の方向付けにあるときに第一の軸及び第二の軸に沿って重心の位置を決定し、物体が第三の軸周囲を回転し且つ第二の方向付けで検査プラットフォーム140に位置付けられるときに少なくとも三のロードセル160から第二のデータセットを受信し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置を決定し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して第三の軸に沿って重心の位置を決定するように、構成される。一の例では、システムにおいて、検査プラットフォーム140が地面と実質的に平行に方向付けられるときに、第一の方向付けは、検査プラットフォーム140に物体を位置付けることを特徴とする。さらに別の例では、システムにおいて、地面に対して検査プラットフォーム140がある角度で方向付けられるときに、第一の方向付けは物体を検査プラットフォーム140に位置付けることを特徴とする。
【0047】
さらに別の例では、システムにおいて、コンピュータベースの処理装置180は、処理装置180により実行されるときに、検査プラットフォーム140に結合された少なくとも三のロードセル160から入力を受信し、物体が第一の方向付けにあるときに、少なくとも三のロードセル160からの入力を使用してX軸及びY軸に沿って物体の重心の位置を決定するように、処理装置180を構成する固定コンピュータ可読媒体に記憶された論理命令をさらに含むことを特徴とする。
【0048】
一の変形例では、システムにおいて、物体は、2度と15度との間の既定の角度で、Z軸に対して回転することを特徴とする。さらに別の変形例では、システムにおいて、コンピュータベースの処理装置180は、処理装置180により実行されるときに、第一の軸と実質的に平行であるX軸と実質的に平行な、C軸から測定されるZ軸の重心を計算するように、処理装置180を構成する固定コンピュータ可読媒体に記憶される論理命令をさらに備えることを特徴とする。さらに別の例では、システムにおいて、コンピュータベース処理装置180は、処理装置180により実行されるときに、キャリブレーション工程を実施して、第一の方向付け及び第二の方向付けで三次元空間にプラットフォームの重心を決定し、物体の重心の位置を調整してプラットフォームの重心を補正するように、処理装置180を構成する固定コンピュータ可読媒体に記憶された論理命令をさらに含むことを特徴とする。
【0049】
さらに別の態様では、固定のメモリモジュール、メモリに結合されたコンピュータベースの処理装置180、及び処理装置180により実行されるときに、第一の方向付けで物体を保持する検査プラットフォーム140に結合された少なくとも三のロードセル160から第一のデータセットを受信し、物体が第一の方向付けにあるときに三次元空間で第一の軸及び第二の軸に沿って重心の位置を決定し、物体が第一及び第二の軸と実質的に直交する第三の軸の周囲で回転し且つ第一の方向付けとは異なる第二の方向付けでの検査プラットフォーム140に位置付けられるときに少なくとも三のロードセルから第二のデータセットを受信し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置を決定し、物体が第二の方向付けにあるときに少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して第三の軸に沿って重心の位置を決定するように、処理装置180を構成する固定メモリモジュールに記憶された論理命令を含む、三次元物体の重心を決定するコンピュータベースのシステムが開示される。さらに別の例では、コンピュータベースのシステムにおいて、検査プラットフォーム140が地面と実質的に平行に方向付けられるときに、第一の方向付けは、検査プラットフォーム140に物体を位置付けることを特徴とする。さらに別の例では、コンピュータベースのシステムは、検査プラットフォーム140が地面に対してある角度で方向付けられるときに、第一の方向付けは、検査プラットフォーム140に物体を位置付けることを特徴とする。
【0050】
さらに別の変形例では、コンピュータベースのシステムは、処理装置180により実行されるときに、検査プラットフォーム140に結合された少なくとも三のロードセル160から入力を受信し、物体が第一の方向付けにあるときに、少なくとも三のロードセル160からの入力を使用してX軸及びY軸に沿って物体の重心の位置を決定するように、処理装置180を構成する論理命令をさらに含む。一の変形例では、コンピュータベースのシステムは、2度と15度との間の既定の角度で、Z軸に対して物体を回転させることを特徴とする。一の変形例では、コンピュータベースのシステムは、処理装置180により実行されるときに、第一の軸と実質的に平行であるX軸と実質的に平行な、C軸から測定されるZ軸の重心を計算するように、処理装置180を構成する論理命令をさらに備える。さらに別の変形例では、コンピュータベースのシステムは、処理装置180により実行されるときに、キャリブレーション工程を実施して、第一の方向付け及び第二の方向付けで三次元空間に検査プラットフォーム140の重心を決定し、物体の重心の位置を調整して検査プラットフォーム140の重心を補正するように、処理装置180を構成する論理命令をさらに含む。
【0051】
それゆえ、ここで述べられるように、物体の重心を決定するシステムは、物体が第一の方向付けでプラットフォームに配置されるときに、X−Y平面に重心を決定する。
【0052】
本明細書中の「一の実施形態」又は「幾つかの実施形態」への言及は、実施形態に関連して述べられる特定のフィーチャー、構造、又は特性が少なくとも実施に含まれることを意味する。明細書中の種々の箇所に見られる「一の実施形態において(では)」という表現は、同じ実施形態に言及していてもよく、又は、すべてが同じ実施形態に言及していなくてもよい。
【0053】
実施形態は、構造的なフィーチャー及び/又は方法論的行為に対して特定の言語で述べられているが、主張される主題は、上述の特定のフィーチャー又は行為に限定されなくてもよいと理解されるべきである。むしろ、特定のフィーチャー及び行為は、主張される主題を実施する例示的な形態として開示される。
【特許請求の範囲】
【請求項1】
三次元物体の重心を決定する方法であって、
第一の方向付けで検査プラットフォーム(140)に物体を位置付けるステップ、
物体が第一の方向付けにあるときに、第一の軸及び第二の軸に沿って重心の位置を決定するステップ、
第一の軸及び第二の軸に実質的に直交する第三の軸に対して物体を回転させ、第二の方向付けで物体を位置付けるステップ、
物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置を決定するステップ、及び
物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して、第三の軸に沿った重心の位置を決定するステップを含む方法。
【請求項2】
第一の方向付けで検査プラットフォーム(140)に物体を位置付けるステップは、地面と実質的に平行に方向付けられる検査プラットフォーム(140)に物体を位置付けるステップを含む、請求項1に記載の方法。
【請求項3】
第一の方向付けで検査プラットフォーム(140)に物体を位置付けるステップは、地面に対してある角度で方向付けられる検査プラットフォーム(140)に物体を位置付けるステップを含む、請求項1に記載の方法。
【請求項4】
物体が第一の方向付けにあるときに、第一の軸及び第二の軸に沿って重心の位置を決定するステップは、
検査プラットフォーム(140)に結合された少なくとも三のロードセル(160)から入力を受信するステップ、及び
物体が第一の方向付けにあるときに、少なくとも三のロードセル(160)からの入力を使用して、第一の軸と実質的に平行なX軸及び第二の軸と実質的に平行なY軸に沿って、物体の重心の位置を決定するステップを含む、請求項1乃至3のいずれか一項に記載の方法。
【請求項5】
第一の軸及び第二の軸と実質的に直交する第三の軸に対して物体を回転させるステップは、2度と15度との間の既定の角度で、第一の軸と実質的に平行なX軸と実質的に平行な、C軸周辺で物体を回転させるステップを含む、請求項1乃至4のいずれか一項に記載の方法。
【請求項6】
物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して、第三の軸に沿った重心の位置を決定するステップは、X軸と実質的に平行な、C軸から測定されたZ軸の重心を計算するステップを含み、Z軸は第三の軸と実質的に平行であり、且つX軸は第一の軸と実質的に平行であることを特徴とする、請求項1乃至5のいずれか一項に記載の方法。
【請求項7】
キャリブレーション工程を実施して、第一の方向付け及び第二の方向付けで三次元空間のプラットフォームの重心を決定するステップ、及び
物体の重心の位置を調整して、プラットフォーム(140)の重心を補正するステップをさらに含む、請求項1に記載の方法。
【請求項8】
三次元物体の重心を決定するシステムであって、
フレーム(110)、
フレーム(110)に結合され且つ物体が取り付けられる検査プラットフォーム(140)であって、検査プラットフォーム(140)は、物体が第一の方向付けにある場合の第一の位置と物体が第二の方向付けにある場合の第二の位置との間の、第一、第二及び第三の軸の周囲で、フレーム(110)に対して回転可能であり、第三の軸は、第一及び第二の軸と実質的に直交することを特徴とする検査プラットフォーム(140)、
フレーム(110)に結合され、検査プラットフォーム(140)に位置付けられる物体に関するマスデータを収集する少なくとも三のロードセル(160)、及び
少なくとも三のロードセル(160)に結合されたコンピュータベースの処理装置(180)を備え、
コンピュータベースの処理装置(180)は、処理装置(180)により実行されるときに、
物体が第一の方向付けで検査プラットフォーム(140)に位置付けられるときに、少なくとも三のロードセル(160)から第一のデータセットを受信し、
物体が第一の方向付けにあるときに、第一の軸及び第二の軸に沿って重心の位置を決定し、
物体が、第三の軸の周囲を回転し、且つ第二の方向付けで検査プラットフォーム(140)に位置づけられるときに、少なくとも三のロードセル(160)から第二のデータセットを受信し、
物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置を決定し、
物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して、第三の軸に沿って重心の位置を決定し、
キャリブレーション工程を実施して、第一の方向付け及び第二の方向付けで三次元空間のプラットフォームの重心を決定し、且つ
物体の重心の位置を調整して、プラットフォームの重心を補正するように、処理装置(180)を構成する固定コンピュータ可読媒体に記憶される論理命令を含むことを特徴とするシステム。
【請求項9】
検査プラットフォーム(140)が地面と実質的に平行に方向付けられるときに、第一の方向付けは、検査プラットフォーム(140)に物体を位置付ける、請求項8に記載のシステム。
【請求項10】
検査プラットフォーム(140)が地面に対してある角度で方向付けられるときに、第一の方向付けは、検査プラットフォーム(140)に物体を位置付ける、請求項8に記載のシステム。
【請求項11】
コンピュータベースの処理装置(180)は、処理装置(180)により実行されるときに、
検査プラットフォーム(140)に結合された少なくとも三のロードセル(160)から入力を受信し、且つ
物体が第一の方向付けにあるときに、少なくとも三のロードセル(160)からの入力を使用して、X軸及びY軸に沿って物体の重心の位置を決定するように、処理装置(180)を構成する固定コンピュータ可読媒体に記憶される論理命令をさらに備える、請求項8に記載のシステム。
【請求項12】
コンピュータベースの処理装置(180)は、処理装置(180)により実行されるときに、第一の軸と実質的に平行であるX軸と実質的に平行な、C軸から測定されるZ軸の重心を計算するように、処理装置(180)を構成する固定コンピュータ可読媒体に記憶される論理命令をさらに備える、請求項8に記載のシステム。
【請求項1】
三次元物体の重心を決定する方法であって、
第一の方向付けで検査プラットフォーム(140)に物体を位置付けるステップ、
物体が第一の方向付けにあるときに、第一の軸及び第二の軸に沿って重心の位置を決定するステップ、
第一の軸及び第二の軸に実質的に直交する第三の軸に対して物体を回転させ、第二の方向付けで物体を位置付けるステップ、
物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置を決定するステップ、及び
物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して、第三の軸に沿った重心の位置を決定するステップを含む方法。
【請求項2】
第一の方向付けで検査プラットフォーム(140)に物体を位置付けるステップは、地面と実質的に平行に方向付けられる検査プラットフォーム(140)に物体を位置付けるステップを含む、請求項1に記載の方法。
【請求項3】
第一の方向付けで検査プラットフォーム(140)に物体を位置付けるステップは、地面に対してある角度で方向付けられる検査プラットフォーム(140)に物体を位置付けるステップを含む、請求項1に記載の方法。
【請求項4】
物体が第一の方向付けにあるときに、第一の軸及び第二の軸に沿って重心の位置を決定するステップは、
検査プラットフォーム(140)に結合された少なくとも三のロードセル(160)から入力を受信するステップ、及び
物体が第一の方向付けにあるときに、少なくとも三のロードセル(160)からの入力を使用して、第一の軸と実質的に平行なX軸及び第二の軸と実質的に平行なY軸に沿って、物体の重心の位置を決定するステップを含む、請求項1乃至3のいずれか一項に記載の方法。
【請求項5】
第一の軸及び第二の軸と実質的に直交する第三の軸に対して物体を回転させるステップは、2度と15度との間の既定の角度で、第一の軸と実質的に平行なX軸と実質的に平行な、C軸周辺で物体を回転させるステップを含む、請求項1乃至4のいずれか一項に記載の方法。
【請求項6】
物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して、第三の軸に沿った重心の位置を決定するステップは、X軸と実質的に平行な、C軸から測定されたZ軸の重心を計算するステップを含み、Z軸は第三の軸と実質的に平行であり、且つX軸は第一の軸と実質的に平行であることを特徴とする、請求項1乃至5のいずれか一項に記載の方法。
【請求項7】
キャリブレーション工程を実施して、第一の方向付け及び第二の方向付けで三次元空間のプラットフォームの重心を決定するステップ、及び
物体の重心の位置を調整して、プラットフォーム(140)の重心を補正するステップをさらに含む、請求項1に記載の方法。
【請求項8】
三次元物体の重心を決定するシステムであって、
フレーム(110)、
フレーム(110)に結合され且つ物体が取り付けられる検査プラットフォーム(140)であって、検査プラットフォーム(140)は、物体が第一の方向付けにある場合の第一の位置と物体が第二の方向付けにある場合の第二の位置との間の、第一、第二及び第三の軸の周囲で、フレーム(110)に対して回転可能であり、第三の軸は、第一及び第二の軸と実質的に直交することを特徴とする検査プラットフォーム(140)、
フレーム(110)に結合され、検査プラットフォーム(140)に位置付けられる物体に関するマスデータを収集する少なくとも三のロードセル(160)、及び
少なくとも三のロードセル(160)に結合されたコンピュータベースの処理装置(180)を備え、
コンピュータベースの処理装置(180)は、処理装置(180)により実行されるときに、
物体が第一の方向付けで検査プラットフォーム(140)に位置付けられるときに、少なくとも三のロードセル(160)から第一のデータセットを受信し、
物体が第一の方向付けにあるときに、第一の軸及び第二の軸に沿って重心の位置を決定し、
物体が、第三の軸の周囲を回転し、且つ第二の方向付けで検査プラットフォーム(140)に位置づけられるときに、少なくとも三のロードセル(160)から第二のデータセットを受信し、
物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置を決定し、
物体が第二の方向付けにあるときに、少なくとも第一の軸又は第二の軸に沿って重心の位置の変更を使用して、第三の軸に沿って重心の位置を決定し、
キャリブレーション工程を実施して、第一の方向付け及び第二の方向付けで三次元空間のプラットフォームの重心を決定し、且つ
物体の重心の位置を調整して、プラットフォームの重心を補正するように、処理装置(180)を構成する固定コンピュータ可読媒体に記憶される論理命令を含むことを特徴とするシステム。
【請求項9】
検査プラットフォーム(140)が地面と実質的に平行に方向付けられるときに、第一の方向付けは、検査プラットフォーム(140)に物体を位置付ける、請求項8に記載のシステム。
【請求項10】
検査プラットフォーム(140)が地面に対してある角度で方向付けられるときに、第一の方向付けは、検査プラットフォーム(140)に物体を位置付ける、請求項8に記載のシステム。
【請求項11】
コンピュータベースの処理装置(180)は、処理装置(180)により実行されるときに、
検査プラットフォーム(140)に結合された少なくとも三のロードセル(160)から入力を受信し、且つ
物体が第一の方向付けにあるときに、少なくとも三のロードセル(160)からの入力を使用して、X軸及びY軸に沿って物体の重心の位置を決定するように、処理装置(180)を構成する固定コンピュータ可読媒体に記憶される論理命令をさらに備える、請求項8に記載のシステム。
【請求項12】
コンピュータベースの処理装置(180)は、処理装置(180)により実行されるときに、第一の軸と実質的に平行であるX軸と実質的に平行な、C軸から測定されるZ軸の重心を計算するように、処理装置(180)を構成する固定コンピュータ可読媒体に記憶される論理命令をさらに備える、請求項8に記載のシステム。
【図1】


【図2】
【図3】

【図4A】
【図4B】
【図5】
【図6】

【図7】
【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【公開番号】特開2013−113846(P2013−113846A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−237372(P2012−237372)
【出願日】平成24年10月29日(2012.10.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.イーサネット
2.UNIX
3.Linux
【出願人】(500520743)ザ・ボーイング・カンパニー (773)
【氏名又は名称原語表記】The Boeing Company
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2012−237372(P2012−237372)
【出願日】平成24年10月29日(2012.10.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.イーサネット
2.UNIX
3.Linux
【出願人】(500520743)ザ・ボーイング・カンパニー (773)
【氏名又は名称原語表記】The Boeing Company
【Fターム(参考)】
[ Back to top ]