
重機のアイドリング判定方法、及び、アイドリング判定システム
【課題】重機がアイドリング状態であるか否かを示す客観的なデータを取得する。
【解決手段】携帯電話機3はダンプトラック2の運転席に設置される。携帯電話機3の加速度測定部36(3軸加速度センサ)でダンプトラック2の3軸方向の加速度を測定し、加速度測定情報生成部30aで3軸方向の加速度を合成して、合成加速度の時系列データを得る。この時系列データは、携帯電話機3からメモリーカード40を介して動作判定装置4に伝達される。動作判定装置4のばらつき算出部42aは、合成加速度の時系列データに基づいて合成加速度の標準偏差を算出する。動作判定部42bは合成加速度の標準偏差に基づいてダンプトラック2の動作状況を判定する。上記時系列に従い、合成加速度の標準偏差の算出とダンプトラック2の動作状況の判定とを繰り返すことで、合成加速度の標準偏差の時系列データとダンプトラック2の動作状況の時系列データとを取得する。
【解決手段】携帯電話機3はダンプトラック2の運転席に設置される。携帯電話機3の加速度測定部36(3軸加速度センサ)でダンプトラック2の3軸方向の加速度を測定し、加速度測定情報生成部30aで3軸方向の加速度を合成して、合成加速度の時系列データを得る。この時系列データは、携帯電話機3からメモリーカード40を介して動作判定装置4に伝達される。動作判定装置4のばらつき算出部42aは、合成加速度の時系列データに基づいて合成加速度の標準偏差を算出する。動作判定部42bは合成加速度の標準偏差に基づいてダンプトラック2の動作状況を判定する。上記時系列に従い、合成加速度の標準偏差の算出とダンプトラック2の動作状況の判定とを繰り返すことで、合成加速度の標準偏差の時系列データとダンプトラック2の動作状況の時系列データとを取得する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジンを駆動源とする重機のアイドリング判定方法、及び、アイドリング判定システムに関する。
【背景技術】
【0002】
特許文献1は、エンジンを駆動源とする車両がアイドリング状態(アイドリング中)であるか否かを判定するための技術を開示している。特許文献1では、車両に搭載されるタグ装置が、アイドリング判定用のセンサ(振動センサ等)を備えている。そして、このセンサを介してエンジンのアイドリング回転域の周波数成分を検出した場合に、車両がアイドリング状態であると判定している。
【0003】
特許文献2には、車両がアイドリング状態であるか否かを判定するための他の技術を開示している。特許文献2では、エンジン運転時に、車載のGPSユニットより得られる車両位置情報に変化がない場合に、車両がアイドリング状態であると判定している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−100625号公報
【特許文献2】特開2004−234260号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、近年、建設工事では、二酸化炭素(CO2)の排出量を抑制するための対策として、エンジンを駆動源とする重機について、いわゆるアイドリングストップを励行している。ここで、重機とは、ダンプトラック等の運搬車両、バックホー等の油圧ショベル、ブルドーザー、ロードローラー等の建設機械を意味する。
【0006】
しかしながら、CO2排出量を確実に抑制するためには、アイドリングストップの履行状況を確認する必要がある。このためには、重機がアイドリング状態であるか否かを示す客観的なデータを取得する必要がある。
【0007】
この客観的なデータとして、特許文献1に記載のように、アイドリング回転域の周波数成分を検出する場合には、比較的高価な周波数分析器(例えば、FFT分析器等(FFT:高速フーリエ変換))を設置する必要があり、それゆえ、上記客観的なデータの取得に要するコストが増大する。また、このような周波数分析を行うためには、当該分析専用のシステムが必要になり得る。
【0008】
また、上記客観的なデータとして、特許文献2に記載のように、車両位置情報と、エンジンの運転/停止状態を示す情報とを取得する場合には、これら情報を関連付ける手段が必要になり、それゆえ、アイドリング判定を行うシステムの構成が複雑になり得る。また、このようなアイドリング判定を行うためには、当該判定専用の複雑なシステムが必要になり得る。
【0009】
本発明は、このような実状に鑑み、比較的安価かつ簡易な構成で、重機がアイドリング状態であるか否かを示す客観的なデータを取得することを課題とする。
【課題を解決するための手段】
【0010】
そのため本発明に係る重機のアイドリング判定方法では、エンジンを駆動源とする重機に、加速度測定手段を設置し、重機の加速度を、加速度測定手段により測定し、この測定した加速度に基づいて、加速度振幅のばらつきを算出し、この算出した加速度振幅のばらつきに基づいて、重機がアイドリング状態であるか否かを判定する。
【0011】
また、本発明に係る重機のアイドリング判定システムでは、エンジンを駆動源とする重機と、この重機に設置されて前記重機の加速度を測定する加速度測定手段と、重機がアイドリング状態であるか否かを判定するアイドリング判定手段と、を含んで構成される。アイドリング判定手段は、加速度測定手段により測定された重機の加速度に基づいて、加速度振幅のばらつきを算出し、この算出した加速度振幅のばらつきに基づいて、重機がアイドリング状態であるか否かを判定する。
【0012】
ここで、本発明における重機とは、ダンプトラック等の運搬車両、バックホー等の油圧ショベル、ブルドーザー、ロードローラー等の建設機械を意味する。
【発明の効果】
【0013】
本発明によれば、加速度測定手段により測定された重機の加速度に基づいて、加速度振幅のばらつきを算出し、この算出した加速度振幅のばらつきに基づいて、重機がアイドリング状態であるか否かを判定する。これにより、周波数分析器等の比較的高価な機器を用いることなく、比較的簡易な構成で、加速度の測定値に基づいて、重機がアイドリング状態であるか否かを示す客観的なデータとして、加速度振幅のばらつきのデータを得ることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の第1実施形態における重機のアイドリング判定システムの概略構成を示す図
【図2】ダンプトラックの概略構成を示す図
【図3】加速度測定情報の取得フローを示すフローチャート
【図4】加速度測定情報の一例を示す図
【図5】エンジン停止状態での合成加速度と度数との関係を示す図
【図6】アイドリング状態での合成加速度と度数との関係を示す図
【図7】走行・稼働状態での合成加速度と度数との関係を示す図
【図8】動作判定フローを示すフローチャート
【図9】動作判定用データの範囲を示す図
【図10】本発明の第2実施形態における重機のアイドリング判定システムの概略構成を示す図
【発明を実施するための形態】
【0015】
以下に本発明の実施の形態を図面に基づいて説明する。
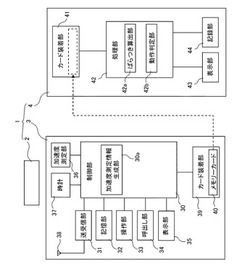
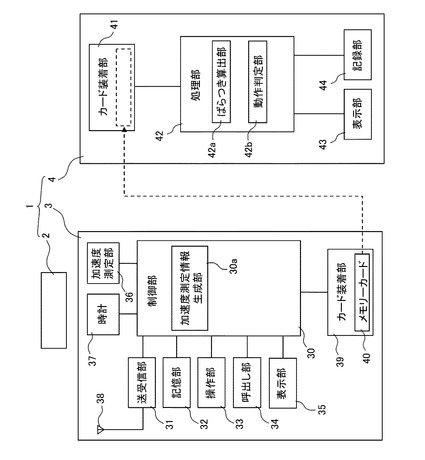
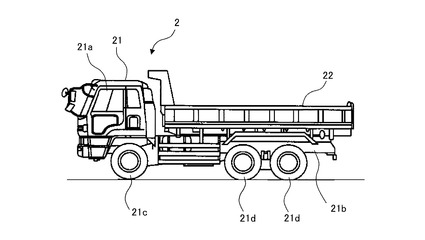
図1は、本発明の第1実施形態における重機のアイドリング判定システムの概略構成を示す。図2は、ダンプトラックの概略構成を示す。尚、本実施形態では、重機としてダンプトラックを例にとって重機のアイドリング判定について説明するが、これに限るものではない。また、本実施形態において、動作判定とは、エンジン停止状態、アイドリング状態、及び、走行・稼働状態からなる3つの状態のうちいずれの状態であるかを判定することを意味する。
【0016】
ダンプトラックの動作判定システム1は、ダンプトラック2と、携帯電話機3と、動作判定装置4とを含んで構成される。ここで、動作判定システム1は、本発明における重機のアイドリング判定システムに対応するものである。また、携帯電話機3は、本発明における携帯端末に対応するものである。
【0017】
ダンプトラック2は、エンジン(図示せず)を駆動源として自走する車両21と、この車両21の後部に搭載された荷台22と、を備える。車両21は、運転席21a、走行方向に所定長さのシャーシ21b、前輪21c及び後輪21d等を備える。また、ダンプトラック2は、荷台22を稼働させるための油圧制御装置(図示せず)を備え、この油圧制御装置は、上記エンジンを駆動源としている。従って、ダンプトラック2は、上記エンジンを駆動源として、走行・稼働する。
【0018】
ダンプトラック2の運転席21aには、携帯電話機3設置用のホルダー(図示せず)が設けられている。従って、携帯電話機3は、このホルダーを介して、ダンプトラック2に設置可能である。
【0019】
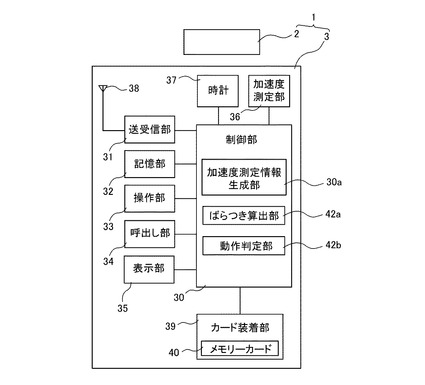
携帯電話機3は、制御部30、送受信部31、記憶部32、操作部33、呼出し部34、表示部35、加速度測定部36、時計37、アンテナ38、及び、カード装着部39を備える。
【0020】
制御部30は、送受信部31、記憶部32、操作部33、呼出し部34、表示部35、加速度測定部36、時計37、及び、カード装着部39に関する各種制御を行う。また、制御部30は、加速度測定情報生成部30aを有する。加速度測定情報生成部30aは、加速度測定部36にて測定された加速度と、時計37から得られる時刻とを関連付けて加速度測定情報を生成する。
【0021】
送受信部31は、アンテナ38を介して受信した通信信号(通話信号)をアナログ信号に変換して受話器(図示せず)に供給する。また、送受信部31は、送話器(図示せず)からの音声信号をデジタル信号に変換して送信する。また、送受信部31は、通信信号がメール信号である場合には、所定のメール信号処理により、メール信号の送受信を行う。
【0022】
記憶部32には、通話相手の電話番号及び名前等を含む電話帳、送信相手のメールアドレス及び名前等を含むアドレス帳、表示部35に文字を表示させるための文字データ等が記憶されている。
【0023】
操作部33は、複数の各種操作キーを有し、電話送信、電話受信、メール送信、メール受信、その他各種機能を実行させるためのキー操作を行うためのものである。尚、本実施形態では、操作部33を操作して、加速度測定部36による加速度測定を開始・終了させる。
【0024】
呼出し部34は、着信時の呼出しを音声で知らせたり、振動で知らせたり、あるいは光で知らせたりするためのものである。
表示部35は、電話帳、アドレス帳、時刻、着信番号、その他各種機能項目等を表示する。また、表示部35は、加速度測定部36による加速度測定の状況を表示することが可能なように構成されている。
【0025】
加速度測定部36は、加速度センサ(図示せず)を備える。この加速度センサは、互いに直交する3つの軸方向(x軸方向,y軸方向,z軸方向)の加速度を測定する3軸加速度センサである。従って、携帯電話機3がダンプトラック2に設置されている場合には、加速度測定部36は、ダンプトラック2の加速度として、上記3つの軸方向の加速度を測定することができる。従って、携帯電話機3は、その加速度測定部36の加速度センサによりダンプトラック2の加速度を測定することで、本発明における加速度測定手段としての機能を実現する。尚、加速度検出部36を構成する加速度センサは、ユーザが携帯電話機3を携帯して歩行する場合には、歩行振動を検出するための振動センサとして利用可能である。
【0026】
制御部30の加速度測定情報生成部30aは、上記3つの軸方向の加速度x,y,zを以下の式(1)により合成して、合成加速度aを算出する。ここで、加速度x,y,zは、それぞれ、x軸方向,y軸方向,z軸方向の加速度である。
【0027】
【数1】

【0028】
ここで、合成加速度aを算出する理由を、以下に説明する。
仮に、加速度測定部36を構成する加速度センサが1軸加速度センサである場合には、ダンプトラック2への携帯電話機3の設置時に、携帯電話機3の設置向き(加速度センサの軸方向)と、ダンプトラック2の車体の向き(基準方向)とを厳密に一致させなければならない。しかしながら、現実には、携帯電話機用の上記ホルダーの向きを厳密に決めて設置することは難しい。このため、本実施形態では、携帯電話機3の設置向きを問わないよう、上記3つの軸の加速度を合成した合成加速度aを算出する。
【0029】
制御部30の加速度測定情報生成部30aは、合成加速度aと時計37から得られる時刻とを関連付けて、加速度測定情報を生成する。従って、加速度測定情報は、合成加速度aの時系列データである。
【0030】
カード装着部39は、携帯電話機3内のデータ(特に、加速度測定情報)の格納先として使用するメモリーカード40を着脱可能に装着するためのものである。
従って、携帯電話機3がダンプトラック2に設置されている場合には、加速度測定部36にて測定された上記3つの軸方向の加速度x,y,zが加速度測定情報生成部30aにて合成されて合成加速度aになり、これと、時計37から得られる時刻とが関連付けられて、加速度測定情報が生成される。そして、この加速度測定情報が、カード装着部39を介して、メモリーカード40に格納される。
【0031】
動作判定装置4は、いわゆるパーソナルコンピュータであり、カード装着部41、処理部42、表示部43、及び、記録部44を備える。
カード装着部41は、メモリーカード40を着脱可能に装着するためのものであり、メモリーカード40に格納された加速度測定情報は、カード装着部41を介して、処理部42に伝達される。
【0032】
処理部42は、CPUや各種メモリ等を備え、各種演算処理を行う。また、処理部42は、メモリーカード40に格納された加速度測定情報に基づいて、加速度振幅のばらつきを算出するばらつき算出部42aと、算出された加速度振幅のばらつきに基づいて、ダンプトラック2の動作判定を行う動作判定部42bと、を備える。
【0033】
表示部43は、動作判定部42bの判定結果を表示するものであり、例えば、ディスプレイ(図示せず)である。
記録部44は、例えば、動作判定部42bの判定結果を紙等に印刷するプリンタ(図示せず)、及び/又は、動作判定部42bの判定結果を記憶する記憶装置(図示せず)であり得る。
【0034】
従って、動作判定装置4では、メモリーカード40に格納された加速度測定情報に基づいて、ばらつき算出部42aにて加速度振幅のばらつきを算出し、動作判定部42bにてダンプトラック2の動作判定を行い、この判定結果を、表示部43にて表示すると共に、記録部44にて記録する。
【0035】
尚、上述の加速度測定情報生成部30a、ばらつき算出部42a、及び、動作判定部42bによって、本発明におけるアイドリング判定手段の機能が実現される。
次に、動作判定システム1におけるダンプトラック2の動作判定方法について、図3〜図9を用いて説明する。
【0036】
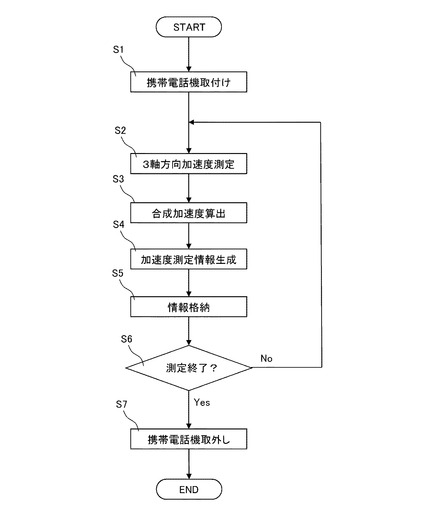
図3は、加速度測定情報の取得フローを示す。尚、このフローは、ダンプトラック2の動作判定を行う前の準備段階と、実際に動作判定を行うときとの双方で、実行され得る。
ステップS1では、ダンプトラック2の上記ホルダーに携帯電話機3を取り付けて、その操作部33を操作して、ダンプトラック2の加速度測定を開始する。
【0037】
ステップS2では、加速度測定部36により、上記3つの軸方向の加速度x,y,zを測定する。
ステップS3では、加速度測定情報生成部30aにて、上記3つの軸方向の加速度x,y,zの測定値を上記式(1)により合成して、合成加速度aを算出する。
【0038】
ステップS4では、加速度測定情報生成部30aにて、合成加速度aと、時計37から得られる時刻とを関連付けて、加速度測定情報を生成する。
ステップS5では、生成された加速度測定情報を、カード装着部39を介して、メモリーカード40に格納する。
【0039】
ステップS2〜S5の処理は、加速度測定部36による加速度測定を終了するまでの間、所定の測定間隔毎に繰り返し行われる(ステップS6)。
そして、加速度測定部36による加速度測定を終了する場合には、操作部33にて測定終了の操作を行った後に、携帯電話機3を上記ホルダーから取り外す(ステップS7)。
【0040】
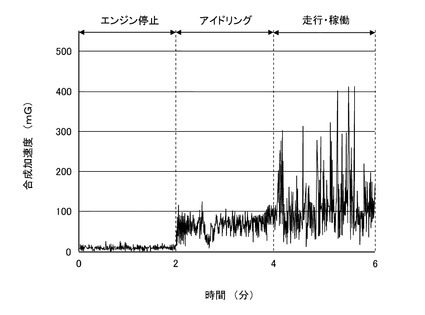
図4は、ダンプトラック2の動作判定を行う前の準備段階で取得された加速度測定情報の一例を示す。詳しくは、図4は、ダンプトラック2の動作状況と、ダンプトラック2の合成加速度aと、加速度測定開始後の経過時間との関係を示している。尚、図4では、6分間の加速度測定時間のうち、最初の2分間をエンジン停止状態とし、中間の2分間をアイドリング状態とし、最後の2分間を走行・稼働状態として、ダンプトラック2の加速度を測定している。また、本実施形態では、合成加速度の単位として「mG」(ミリ・ジー)を用いており、1mG≒9.8×10−3m/s2である。
【0041】
本発明者は、図4に示すように、合成加速度aの振幅のばらつき(具体的には、後述する合成加速度aの標準偏差σ)について、「エンジン停止状態<アイドリング状態<走行・稼働状態」の関係が成り立っていることを見出した。すなわち、本発明者は、合成加速度aの振幅のばらつきには、ダンプトラック2の動作状況の変化に対応する閾値(換言すれば、動作判別閾値)が存在することを見出した。特に重機を使用する建設作業においては、一定の作業サイクルを繰り返し実施することが多く、加速度振幅のばらつきを算定して所定の閾値を設定することで、アイドリング状態であるか、走行・稼働状態であるか、の判定が的確に実施できることが実証できた。このため、本実施形態では、ダンプトラック2の動作判定を行う前の準備段階で、動作判別閾値の設定を行う。
【0042】
図5〜図7は、動作判別閾値を設定するために用いられる基礎データの一例を示す。
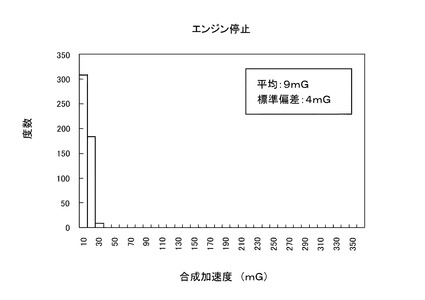
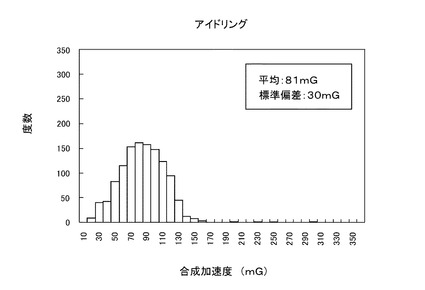
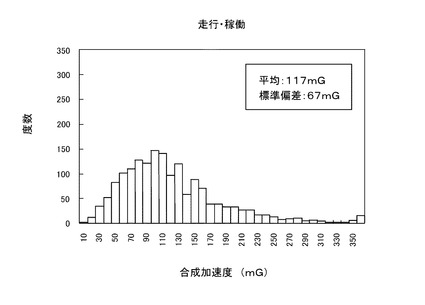
図5は、所定の加速度測定時間内におけるエンジン停止状態での合成加速度aと度数との関係を示す。図6は、所定の加速度測定時間内におけるアイドリング状態での合成加速度aと度数との関係を示す。図7は、所定の加速度測定時間内における走行・稼働状態での合成加速度aと度数との関係を示す。
【0043】
図5に示すエンジン停止状態では、合成加速度aの平均値aaveは9mGであり、以下の式(2)により合成加速度aの標準偏差σを算出すると、4mGであった。ここで、式(2)におけるnは、度数の合計値である。また、合成加速度aの標準偏差σは、本発明における加速度振幅のばらつきに対応するものである。
【0044】
【数2】
【0045】
同様に、図6に示すアイドリング状態では、合成加速度aの平均値aaveは81mGであり、上記式(2)により合成加速度aの標準偏差σを算出すると、30mGであった。
【0046】
また、図7に示す走行・稼働状態では、合成加速度aの平均値aaveは117mGであり、上記式(2)により合成加速度aの標準偏差σを算出すると、67mGであった。
従って、本実施形態では、エンジン停止状態とアイドリング状態との判別をするための動作判別閾値として、閾値S1を、エンジン停止状態での標準偏差(4mG)と、アイドリング状態での標準偏差(30mG)の間の値である12mGに設定する。また、アイドリング状態と走行・稼働状態との判別をするための動作判別閾値として、閾値S2を、アイドリング状態での標準偏差(30mG)と、走行・稼働状態での標準偏差(67mG)との間の値である45mGに設定する。尚、閾値S2については、走行・稼働状態での標準偏差が路面状況や天候等によって変化するので、これらを加味して、閾値S2を設定することが可能である。
【0047】
このようにして、ダンプトラック2の動作判定を行う前の準備段階で、動作判別閾値として、閾値S1,S2が設定される。
閾値S1,S2が設定された後に実行される、ダンプトラック2の動作判定について、図8を用いて説明する。
【0048】
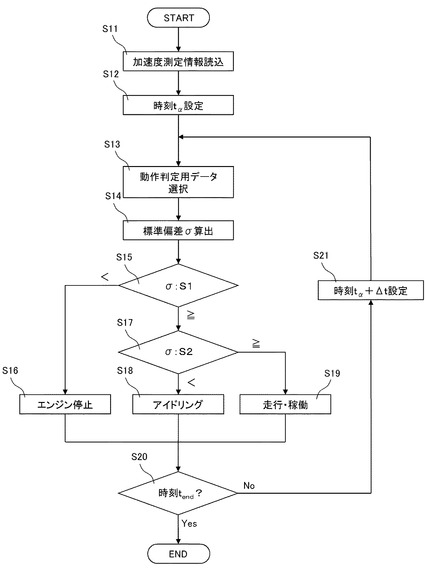
図8は、動作判定装置4で実行される動作判定フローを示す。尚、このフローは、加速度測定時間内の時刻tαから加速度測定終了時刻tendまでの間についてダンプトラック2の動作判定を行う場合を示しているが、時刻tαを加速度測定開始時刻t0とすることで、加速度測定時間の全域にわたるダンプトラック2の動作を判定することが可能である。
【0049】
ステップS11では、加速度測定情報を含むメモリーカード40を携帯電話機3から取り出し、カード装着部41に装着して、加速度測定情報を読込む。
ステップS12では、動作判定の対象となる時刻tαを設定する。
【0050】
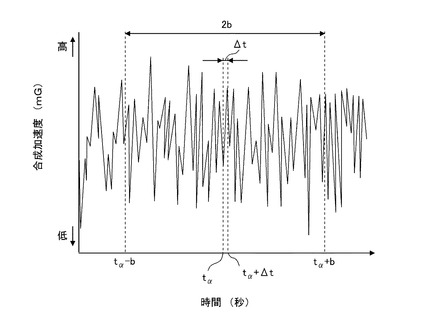
ステップS13では、ばらつき算出部42aにて、時刻tαに対応する動作判定用データを選択する。このデータ選択について、図9を用いて説明する。
図9は、時刻tαに対応する動作判定用データの範囲を示す。
【0051】
ステップS13における動作判定用データの選択では、図9に示すように、時刻tαの前後b秒(換言すれば、時刻tα−bから時刻tα+bまでの時間)の加速度測定情報(すなわち、合成加速度aの時系列データ)を選択する。例えば、所定の測定間隔Δtを0.25秒と仮定し、上記b秒を15秒と仮定すると、動作判定用データのデータ数は、120(=(15×2)÷0.25)になる。尚、所定の測定間隔Δt及び上記b秒については、任意に変更可能である。
【0052】
図8に戻り、ステップS14では、ばらつき算出部42aにて、選択された動作判定用データと、上記式(2)とに基づいて、時刻tαに対応する合成加速度aの標準偏差σを算出する。
【0053】
ステップS15では、動作判定部42bにて、標準偏差σと閾値S1とを比較する。
σ<S1の場合は、ステップS16に進み、ダンプトラック2がエンジン停止状態であると判定し、この判定結果と、標準偏差σと、時刻tαとを関連付けて、処理部42のメモリ等に記憶させる。
【0054】
σ≧S1の場合は、ステップS17に進み、動作判定部42bにて、標準偏差σと閾値S2とを比較する。
σ<S2の場合は、ステップS18に進み、ダンプトラック2がアイドリング状態であると判定し、この判定結果と、標準偏差σと、時刻tαとを関連付けて、処理部42のメモリ等に記憶させる。
【0055】
σ≧S2の場合は、ステップS19に進み、ダンプトラック2が運転・稼働状態であると判定し、この判定結果と、標準偏差σと、時刻tαとを関連付けて、処理部42のメモリ等に記憶させる。
【0056】
ステップS16,S18,S19の後に、ステップS20に進み、時刻tαが加速度測定終了時刻tendであるか否かを判定する。
時刻tαが加速度測定終了時刻tendでなければ、ステップS21にて、時刻tαに所定の測定間隔Δtを加算した時刻tα+Δtを新たに設定して(図9参照)、ステップS13〜S20の処理を繰り返す。そして、時刻tαが加速度測定終了時刻tendになった時点で、ダンプトラック2の動作判定を終了する。
【0057】
従って、図8に示す動作判定フローにより、合成加速度aの標準偏差σの時系列データと、それに対応するダンプトラック2の動作状況の時系列データとを得ることができる。また、得られたこれら時系列データに基づいて、アイドリング状態の時間帯を把握することができ、更に、アイドリング状態の時間帯を裏付けるデータとして、合成加速度aの標準偏差σの時系列データを用いることができるので、アイドリングストップの履行状況の検証を簡易化することができる。尚、合成加速度aの標準偏差σの時系列データと、それに対応するダンプトラック2の動作状況の時系列データとは、表示部43にて表示されると共に、記録部44にて記録される。
【0058】
ところで、特許文献2には、車両の加速度の標準偏差を利用して、安全運転診断を行うことが記載されている。
しかしながら、特許文献2に記載の発明は、車両走行時に安全運転であったか否かを診断することが前提であり、それゆえ、車両が走行していないアイドリング時を対象として、車両の加速度の標準偏差に基づいて、車両がアイドリング状態か否かを判定するという思想はない。それゆえ、特許文献2に記載の発明では、安全運転であったか否かを判定するための加速度の標準偏差の閾値として、1つの閾値しか設定していない。
【0059】
この点、本発明者は、図4に示すように、合成加速度aの振幅のばらつき(具体的には、合成加速度aの標準偏差σ)について、「エンジン停止状態<アイドリング状態<走行・稼働状態」の関係が成り立っていることを見出し、この知見に基づいて、アイドリング状態であるか否かを判定するための閾値として、上述の閾値S1,S2を設定している。これは、特に重機を使用する建設作業においては、一定の作業サイクルを繰り返し実施することが多く、加速度振幅のばらつきを算定して所定の閾値を設定することで、アイドリング状態であるか、走行・稼働状態であるか、の判定が的確に実施できることが実証できたことによるものである。そして、設定された閾値S1,S2に基づいて、図8に示す動作判定フローを実行することにより、合成加速度aの標準偏差σの時系列データと、それに対応するダンプトラック2の動作状況の時系列データとを得、これら時系列データに基づいて、比較的安価かつ簡易な構成で、アイドリング状態の時間帯を把握することができる。
【0060】
本実施形態によれば、動作判定システム1は、エンジン(図示せず)を駆動源とするダンプトラック2と、このダンプトラック2に設置されてダンプトラック2の加速度を測定する加速度測定手段(加速度測定部36(加速度センサ)を備える携帯電話機3)と、ダンプトラック2がアイドリング状態であるか否かを判定するアイドリング判定手段(加速度測定情報生成部30a、ばらつき算出部42a、及び、動作判定部42b)を含んで構成される。ばらつき算出部42aは、加速度測定部36により測定された加速度に基づいて、加速度振幅のばらつき(合成加速度aの標準偏差σ)を算出する。動作判定部42bは、算出した加速度振幅のばらつき(合成加速度aの標準偏差σ)に基づいて、ダンプトラック2がアイドリング状態であるか否かを判定する。これにより、周波数分析器等の比較的高価な機器を用いることなく、比較的簡易な構成で、加速度の測定値に基づいて、ダンプトラック2がアイドリング状態であるか否かを示す客観的なデータとして、加速度振幅のばらつき(合成加速度aの標準偏差σ)のデータを得ることができる。
【0061】
また本実施形態によれば、加速度センサを備える携帯端末(携帯電話機3)が本発明における加速度測定手段としての機能を実現する。つまり、ダンプトラック2の加速度が、携帯端末の加速度センサにより測定される。このように加速度センサは携帯端末に搭載可能であり、それゆえ、建設工事に利用する場合の汎用性、適用性に優れている。
【0062】
また本実施形態によれば、加速度測定情報生成部30aは、加速度測定部36(3軸加速度センサ)により測定された3つの軸方向の加速度x,y,zを合成して合成加速度aとし、ばらつき算出部42aは、合成加速度aに基づいて、加速度振幅のばらつき(合成加速度aの標準偏差σ)を算出する。これにより、携帯電話機3のダンプトラック2に対する設置向きによらず、安定して、ダンプトラック2の加速度を測定することができるので、ダンプトラック2の動作判定のための加速度測定情報の取得を比較的容易に行うことができる。
【0063】
尚、本実施形態では、携帯電話機3の加速度測定情報生成部30aにて、合成加速度aを算出しているが、合成加速度aの算出箇所はこれに限らず、例えば、動作判定装置4のばらつき算出部42aにて、合成加速度aの標準偏差σを求める直前に、合成加速度aを算出するようにしてもよい。
【0064】
また、本実施形態では、携帯電話機3から動作判定装置4への加速度測定情報の伝達を、メモリーカード40を介して行っているが、情報の伝達方式はこれに限らず、例えば、携帯電話機3と動作判定装置4との各々に予め設けられたインターフェース部(図示せず)を信号線で電気接続し、この信号線を介して、加速度測定情報の伝達を行ってもよい。
【0065】
図10は、本発明の第2実施形態における重機のアイドリング判定システムの概略構成を示す。
図1に示した第1実施形態と異なる点について説明する。
【0066】
制御部30において、上述のばらつき算出部42a及び動作判定部42bの機能が実現されるように構成されている。すなわち、ダンプトラック2の加速度の測定から、ダンプトラック2の動作判定までを、携帯電話機3にて処理するように構成されている。
【0067】
また、本実施形態では、図8に示した動作判定フローを携帯電話機3にて実行する。このため、図8に示したステップS11にて、加速度測定情報を、加速度測定情報生成部30aから直接的に読込む。また、ステップS12では、動作判定の対象となる時刻tαとして、時計37の現在時刻より数秒前の時刻(例えば、現在時刻より上記b秒程度前の時刻)が設定される。更に、ステップS16,S18,S19における判定結果が、表示部35に表示される。これにより、上記b秒がわずか数秒に設定されている場合には、ダンプトラック2の運転者は、ダンプトラック2の上記ホルダーに取り付けられた携帯電話機3の表示部35を目視することにより、ダンプトラック2の動作状況を、ほぼリアルタイムで把握することができる。
【0068】
また、制御部30は、アイドリング状態の継続時間を算出し、この継続時間が予め設定された所定時間以上になると、表示部35にて、アイドリング状態が長期間にわたり継続している旨の注意喚起メッセージを自動発令するように構成され得る。また、この自動発令と同時に、呼出し部34にて、警告音及び/又は光を自動的に発するように構成され得る。
【0069】
特に本実施形態によれば、携帯電話機3の制御部30にて、ばらつき算出部42a及び動作判定部42bの機能が実現されることにより、ダンプトラック2の加速度の測定から、ダンプトラック2の動作判定までを、携帯電話機3にて処理することができるので、動作判定システム1の構成を簡素化することができる。
【0070】
尚、第1及び第2実施形態では、重機の一例としてダンプトラック2を採用して、重機の動作判定(特に、アイドリング判定)を説明したが、重機はこれに限らず、例えば、重機として、ダンプトラック以外の運搬車両、バックホー等の油圧ショベル、ブルドーザー、ロードローラー等の建設機械を採用して、上述の動作判定を行うことが可能である。
【0071】
また、第1及び第2実施形態では、携帯端末の一例として携帯電話機3を採用して、重機の動作判定(特に、アイドリング判定)を説明したが、携帯端末は重機等からの取り外し移動が容易な機器であればこれに限らず、例えば、携帯端末として、PHS、PDA、スマートフォン等を採用して、上述の動作判定を行うことが可能である。
【0072】
また、第1及び第2実施形態では、加速度測定手段の一例として、加速度センサを備える携帯端末(携帯電話機3)を採用して、重機の動作判定(特に、アイドリング判定)を説明したが、加速度測定手段は、重機の加速度が測定可能であり、かつ、重機に設置可能であれば、これに限らない。
【0073】
また、第1及び第2実施形態では、加速度振幅のばらつきとして、合成加速度aの標準偏差σを用いて説明したが、加速度振幅のばらつきはこれに限らず、例えば、加速度振幅のばらつきとして、合成加速度aの分散σ2を用いることも可能である。
【符号の説明】
【0074】
1 動作判定システム(アイドリング判定システム)
2 ダンプトラック(重機)
3 携帯電話機(携帯端末)
4 動作判定装置
21 車両
21a 運転席
21b シャーシ
21c 前輪
21d 後輪
22 荷台
30 制御部
30a 加速度測定情報生成部
31 送受信部
32 記憶部
33 操作部
34 呼出し部
35 表示部
36 加速度測定部
37 時計
38 アンテナ
39 カード装着部
40 メモリーカード
41 カード装着部
42 処理部
42a ばらつき算出部
42b 動作判定部
43 表示部
44 記録部
【技術分野】
【0001】
本発明は、エンジンを駆動源とする重機のアイドリング判定方法、及び、アイドリング判定システムに関する。
【背景技術】
【0002】
特許文献1は、エンジンを駆動源とする車両がアイドリング状態(アイドリング中)であるか否かを判定するための技術を開示している。特許文献1では、車両に搭載されるタグ装置が、アイドリング判定用のセンサ(振動センサ等)を備えている。そして、このセンサを介してエンジンのアイドリング回転域の周波数成分を検出した場合に、車両がアイドリング状態であると判定している。
【0003】
特許文献2には、車両がアイドリング状態であるか否かを判定するための他の技術を開示している。特許文献2では、エンジン運転時に、車載のGPSユニットより得られる車両位置情報に変化がない場合に、車両がアイドリング状態であると判定している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−100625号公報
【特許文献2】特開2004−234260号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、近年、建設工事では、二酸化炭素(CO2)の排出量を抑制するための対策として、エンジンを駆動源とする重機について、いわゆるアイドリングストップを励行している。ここで、重機とは、ダンプトラック等の運搬車両、バックホー等の油圧ショベル、ブルドーザー、ロードローラー等の建設機械を意味する。
【0006】
しかしながら、CO2排出量を確実に抑制するためには、アイドリングストップの履行状況を確認する必要がある。このためには、重機がアイドリング状態であるか否かを示す客観的なデータを取得する必要がある。
【0007】
この客観的なデータとして、特許文献1に記載のように、アイドリング回転域の周波数成分を検出する場合には、比較的高価な周波数分析器(例えば、FFT分析器等(FFT:高速フーリエ変換))を設置する必要があり、それゆえ、上記客観的なデータの取得に要するコストが増大する。また、このような周波数分析を行うためには、当該分析専用のシステムが必要になり得る。
【0008】
また、上記客観的なデータとして、特許文献2に記載のように、車両位置情報と、エンジンの運転/停止状態を示す情報とを取得する場合には、これら情報を関連付ける手段が必要になり、それゆえ、アイドリング判定を行うシステムの構成が複雑になり得る。また、このようなアイドリング判定を行うためには、当該判定専用の複雑なシステムが必要になり得る。
【0009】
本発明は、このような実状に鑑み、比較的安価かつ簡易な構成で、重機がアイドリング状態であるか否かを示す客観的なデータを取得することを課題とする。
【課題を解決するための手段】
【0010】
そのため本発明に係る重機のアイドリング判定方法では、エンジンを駆動源とする重機に、加速度測定手段を設置し、重機の加速度を、加速度測定手段により測定し、この測定した加速度に基づいて、加速度振幅のばらつきを算出し、この算出した加速度振幅のばらつきに基づいて、重機がアイドリング状態であるか否かを判定する。
【0011】
また、本発明に係る重機のアイドリング判定システムでは、エンジンを駆動源とする重機と、この重機に設置されて前記重機の加速度を測定する加速度測定手段と、重機がアイドリング状態であるか否かを判定するアイドリング判定手段と、を含んで構成される。アイドリング判定手段は、加速度測定手段により測定された重機の加速度に基づいて、加速度振幅のばらつきを算出し、この算出した加速度振幅のばらつきに基づいて、重機がアイドリング状態であるか否かを判定する。
【0012】
ここで、本発明における重機とは、ダンプトラック等の運搬車両、バックホー等の油圧ショベル、ブルドーザー、ロードローラー等の建設機械を意味する。
【発明の効果】
【0013】
本発明によれば、加速度測定手段により測定された重機の加速度に基づいて、加速度振幅のばらつきを算出し、この算出した加速度振幅のばらつきに基づいて、重機がアイドリング状態であるか否かを判定する。これにより、周波数分析器等の比較的高価な機器を用いることなく、比較的簡易な構成で、加速度の測定値に基づいて、重機がアイドリング状態であるか否かを示す客観的なデータとして、加速度振幅のばらつきのデータを得ることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の第1実施形態における重機のアイドリング判定システムの概略構成を示す図
【図2】ダンプトラックの概略構成を示す図
【図3】加速度測定情報の取得フローを示すフローチャート
【図4】加速度測定情報の一例を示す図
【図5】エンジン停止状態での合成加速度と度数との関係を示す図
【図6】アイドリング状態での合成加速度と度数との関係を示す図
【図7】走行・稼働状態での合成加速度と度数との関係を示す図
【図8】動作判定フローを示すフローチャート
【図9】動作判定用データの範囲を示す図
【図10】本発明の第2実施形態における重機のアイドリング判定システムの概略構成を示す図
【発明を実施するための形態】
【0015】
以下に本発明の実施の形態を図面に基づいて説明する。
図1は、本発明の第1実施形態における重機のアイドリング判定システムの概略構成を示す。図2は、ダンプトラックの概略構成を示す。尚、本実施形態では、重機としてダンプトラックを例にとって重機のアイドリング判定について説明するが、これに限るものではない。また、本実施形態において、動作判定とは、エンジン停止状態、アイドリング状態、及び、走行・稼働状態からなる3つの状態のうちいずれの状態であるかを判定することを意味する。
【0016】
ダンプトラックの動作判定システム1は、ダンプトラック2と、携帯電話機3と、動作判定装置4とを含んで構成される。ここで、動作判定システム1は、本発明における重機のアイドリング判定システムに対応するものである。また、携帯電話機3は、本発明における携帯端末に対応するものである。
【0017】
ダンプトラック2は、エンジン(図示せず)を駆動源として自走する車両21と、この車両21の後部に搭載された荷台22と、を備える。車両21は、運転席21a、走行方向に所定長さのシャーシ21b、前輪21c及び後輪21d等を備える。また、ダンプトラック2は、荷台22を稼働させるための油圧制御装置(図示せず)を備え、この油圧制御装置は、上記エンジンを駆動源としている。従って、ダンプトラック2は、上記エンジンを駆動源として、走行・稼働する。
【0018】
ダンプトラック2の運転席21aには、携帯電話機3設置用のホルダー(図示せず)が設けられている。従って、携帯電話機3は、このホルダーを介して、ダンプトラック2に設置可能である。
【0019】
携帯電話機3は、制御部30、送受信部31、記憶部32、操作部33、呼出し部34、表示部35、加速度測定部36、時計37、アンテナ38、及び、カード装着部39を備える。
【0020】
制御部30は、送受信部31、記憶部32、操作部33、呼出し部34、表示部35、加速度測定部36、時計37、及び、カード装着部39に関する各種制御を行う。また、制御部30は、加速度測定情報生成部30aを有する。加速度測定情報生成部30aは、加速度測定部36にて測定された加速度と、時計37から得られる時刻とを関連付けて加速度測定情報を生成する。
【0021】
送受信部31は、アンテナ38を介して受信した通信信号(通話信号)をアナログ信号に変換して受話器(図示せず)に供給する。また、送受信部31は、送話器(図示せず)からの音声信号をデジタル信号に変換して送信する。また、送受信部31は、通信信号がメール信号である場合には、所定のメール信号処理により、メール信号の送受信を行う。
【0022】
記憶部32には、通話相手の電話番号及び名前等を含む電話帳、送信相手のメールアドレス及び名前等を含むアドレス帳、表示部35に文字を表示させるための文字データ等が記憶されている。
【0023】
操作部33は、複数の各種操作キーを有し、電話送信、電話受信、メール送信、メール受信、その他各種機能を実行させるためのキー操作を行うためのものである。尚、本実施形態では、操作部33を操作して、加速度測定部36による加速度測定を開始・終了させる。
【0024】
呼出し部34は、着信時の呼出しを音声で知らせたり、振動で知らせたり、あるいは光で知らせたりするためのものである。
表示部35は、電話帳、アドレス帳、時刻、着信番号、その他各種機能項目等を表示する。また、表示部35は、加速度測定部36による加速度測定の状況を表示することが可能なように構成されている。
【0025】
加速度測定部36は、加速度センサ(図示せず)を備える。この加速度センサは、互いに直交する3つの軸方向(x軸方向,y軸方向,z軸方向)の加速度を測定する3軸加速度センサである。従って、携帯電話機3がダンプトラック2に設置されている場合には、加速度測定部36は、ダンプトラック2の加速度として、上記3つの軸方向の加速度を測定することができる。従って、携帯電話機3は、その加速度測定部36の加速度センサによりダンプトラック2の加速度を測定することで、本発明における加速度測定手段としての機能を実現する。尚、加速度検出部36を構成する加速度センサは、ユーザが携帯電話機3を携帯して歩行する場合には、歩行振動を検出するための振動センサとして利用可能である。
【0026】
制御部30の加速度測定情報生成部30aは、上記3つの軸方向の加速度x,y,zを以下の式(1)により合成して、合成加速度aを算出する。ここで、加速度x,y,zは、それぞれ、x軸方向,y軸方向,z軸方向の加速度である。
【0027】
【数1】
【0028】
ここで、合成加速度aを算出する理由を、以下に説明する。
仮に、加速度測定部36を構成する加速度センサが1軸加速度センサである場合には、ダンプトラック2への携帯電話機3の設置時に、携帯電話機3の設置向き(加速度センサの軸方向)と、ダンプトラック2の車体の向き(基準方向)とを厳密に一致させなければならない。しかしながら、現実には、携帯電話機用の上記ホルダーの向きを厳密に決めて設置することは難しい。このため、本実施形態では、携帯電話機3の設置向きを問わないよう、上記3つの軸の加速度を合成した合成加速度aを算出する。
【0029】
制御部30の加速度測定情報生成部30aは、合成加速度aと時計37から得られる時刻とを関連付けて、加速度測定情報を生成する。従って、加速度測定情報は、合成加速度aの時系列データである。
【0030】
カード装着部39は、携帯電話機3内のデータ(特に、加速度測定情報)の格納先として使用するメモリーカード40を着脱可能に装着するためのものである。
従って、携帯電話機3がダンプトラック2に設置されている場合には、加速度測定部36にて測定された上記3つの軸方向の加速度x,y,zが加速度測定情報生成部30aにて合成されて合成加速度aになり、これと、時計37から得られる時刻とが関連付けられて、加速度測定情報が生成される。そして、この加速度測定情報が、カード装着部39を介して、メモリーカード40に格納される。
【0031】
動作判定装置4は、いわゆるパーソナルコンピュータであり、カード装着部41、処理部42、表示部43、及び、記録部44を備える。
カード装着部41は、メモリーカード40を着脱可能に装着するためのものであり、メモリーカード40に格納された加速度測定情報は、カード装着部41を介して、処理部42に伝達される。
【0032】
処理部42は、CPUや各種メモリ等を備え、各種演算処理を行う。また、処理部42は、メモリーカード40に格納された加速度測定情報に基づいて、加速度振幅のばらつきを算出するばらつき算出部42aと、算出された加速度振幅のばらつきに基づいて、ダンプトラック2の動作判定を行う動作判定部42bと、を備える。
【0033】
表示部43は、動作判定部42bの判定結果を表示するものであり、例えば、ディスプレイ(図示せず)である。
記録部44は、例えば、動作判定部42bの判定結果を紙等に印刷するプリンタ(図示せず)、及び/又は、動作判定部42bの判定結果を記憶する記憶装置(図示せず)であり得る。
【0034】
従って、動作判定装置4では、メモリーカード40に格納された加速度測定情報に基づいて、ばらつき算出部42aにて加速度振幅のばらつきを算出し、動作判定部42bにてダンプトラック2の動作判定を行い、この判定結果を、表示部43にて表示すると共に、記録部44にて記録する。
【0035】
尚、上述の加速度測定情報生成部30a、ばらつき算出部42a、及び、動作判定部42bによって、本発明におけるアイドリング判定手段の機能が実現される。
次に、動作判定システム1におけるダンプトラック2の動作判定方法について、図3〜図9を用いて説明する。
【0036】
図3は、加速度測定情報の取得フローを示す。尚、このフローは、ダンプトラック2の動作判定を行う前の準備段階と、実際に動作判定を行うときとの双方で、実行され得る。
ステップS1では、ダンプトラック2の上記ホルダーに携帯電話機3を取り付けて、その操作部33を操作して、ダンプトラック2の加速度測定を開始する。
【0037】
ステップS2では、加速度測定部36により、上記3つの軸方向の加速度x,y,zを測定する。
ステップS3では、加速度測定情報生成部30aにて、上記3つの軸方向の加速度x,y,zの測定値を上記式(1)により合成して、合成加速度aを算出する。
【0038】
ステップS4では、加速度測定情報生成部30aにて、合成加速度aと、時計37から得られる時刻とを関連付けて、加速度測定情報を生成する。
ステップS5では、生成された加速度測定情報を、カード装着部39を介して、メモリーカード40に格納する。
【0039】
ステップS2〜S5の処理は、加速度測定部36による加速度測定を終了するまでの間、所定の測定間隔毎に繰り返し行われる(ステップS6)。
そして、加速度測定部36による加速度測定を終了する場合には、操作部33にて測定終了の操作を行った後に、携帯電話機3を上記ホルダーから取り外す(ステップS7)。
【0040】
図4は、ダンプトラック2の動作判定を行う前の準備段階で取得された加速度測定情報の一例を示す。詳しくは、図4は、ダンプトラック2の動作状況と、ダンプトラック2の合成加速度aと、加速度測定開始後の経過時間との関係を示している。尚、図4では、6分間の加速度測定時間のうち、最初の2分間をエンジン停止状態とし、中間の2分間をアイドリング状態とし、最後の2分間を走行・稼働状態として、ダンプトラック2の加速度を測定している。また、本実施形態では、合成加速度の単位として「mG」(ミリ・ジー)を用いており、1mG≒9.8×10−3m/s2である。
【0041】
本発明者は、図4に示すように、合成加速度aの振幅のばらつき(具体的には、後述する合成加速度aの標準偏差σ)について、「エンジン停止状態<アイドリング状態<走行・稼働状態」の関係が成り立っていることを見出した。すなわち、本発明者は、合成加速度aの振幅のばらつきには、ダンプトラック2の動作状況の変化に対応する閾値(換言すれば、動作判別閾値)が存在することを見出した。特に重機を使用する建設作業においては、一定の作業サイクルを繰り返し実施することが多く、加速度振幅のばらつきを算定して所定の閾値を設定することで、アイドリング状態であるか、走行・稼働状態であるか、の判定が的確に実施できることが実証できた。このため、本実施形態では、ダンプトラック2の動作判定を行う前の準備段階で、動作判別閾値の設定を行う。
【0042】
図5〜図7は、動作判別閾値を設定するために用いられる基礎データの一例を示す。
図5は、所定の加速度測定時間内におけるエンジン停止状態での合成加速度aと度数との関係を示す。図6は、所定の加速度測定時間内におけるアイドリング状態での合成加速度aと度数との関係を示す。図7は、所定の加速度測定時間内における走行・稼働状態での合成加速度aと度数との関係を示す。
【0043】
図5に示すエンジン停止状態では、合成加速度aの平均値aaveは9mGであり、以下の式(2)により合成加速度aの標準偏差σを算出すると、4mGであった。ここで、式(2)におけるnは、度数の合計値である。また、合成加速度aの標準偏差σは、本発明における加速度振幅のばらつきに対応するものである。
【0044】
【数2】
【0045】
同様に、図6に示すアイドリング状態では、合成加速度aの平均値aaveは81mGであり、上記式(2)により合成加速度aの標準偏差σを算出すると、30mGであった。
【0046】
また、図7に示す走行・稼働状態では、合成加速度aの平均値aaveは117mGであり、上記式(2)により合成加速度aの標準偏差σを算出すると、67mGであった。
従って、本実施形態では、エンジン停止状態とアイドリング状態との判別をするための動作判別閾値として、閾値S1を、エンジン停止状態での標準偏差(4mG)と、アイドリング状態での標準偏差(30mG)の間の値である12mGに設定する。また、アイドリング状態と走行・稼働状態との判別をするための動作判別閾値として、閾値S2を、アイドリング状態での標準偏差(30mG)と、走行・稼働状態での標準偏差(67mG)との間の値である45mGに設定する。尚、閾値S2については、走行・稼働状態での標準偏差が路面状況や天候等によって変化するので、これらを加味して、閾値S2を設定することが可能である。
【0047】
このようにして、ダンプトラック2の動作判定を行う前の準備段階で、動作判別閾値として、閾値S1,S2が設定される。
閾値S1,S2が設定された後に実行される、ダンプトラック2の動作判定について、図8を用いて説明する。
【0048】
図8は、動作判定装置4で実行される動作判定フローを示す。尚、このフローは、加速度測定時間内の時刻tαから加速度測定終了時刻tendまでの間についてダンプトラック2の動作判定を行う場合を示しているが、時刻tαを加速度測定開始時刻t0とすることで、加速度測定時間の全域にわたるダンプトラック2の動作を判定することが可能である。
【0049】
ステップS11では、加速度測定情報を含むメモリーカード40を携帯電話機3から取り出し、カード装着部41に装着して、加速度測定情報を読込む。
ステップS12では、動作判定の対象となる時刻tαを設定する。
【0050】
ステップS13では、ばらつき算出部42aにて、時刻tαに対応する動作判定用データを選択する。このデータ選択について、図9を用いて説明する。
図9は、時刻tαに対応する動作判定用データの範囲を示す。
【0051】
ステップS13における動作判定用データの選択では、図9に示すように、時刻tαの前後b秒(換言すれば、時刻tα−bから時刻tα+bまでの時間)の加速度測定情報(すなわち、合成加速度aの時系列データ)を選択する。例えば、所定の測定間隔Δtを0.25秒と仮定し、上記b秒を15秒と仮定すると、動作判定用データのデータ数は、120(=(15×2)÷0.25)になる。尚、所定の測定間隔Δt及び上記b秒については、任意に変更可能である。
【0052】
図8に戻り、ステップS14では、ばらつき算出部42aにて、選択された動作判定用データと、上記式(2)とに基づいて、時刻tαに対応する合成加速度aの標準偏差σを算出する。
【0053】
ステップS15では、動作判定部42bにて、標準偏差σと閾値S1とを比較する。
σ<S1の場合は、ステップS16に進み、ダンプトラック2がエンジン停止状態であると判定し、この判定結果と、標準偏差σと、時刻tαとを関連付けて、処理部42のメモリ等に記憶させる。
【0054】
σ≧S1の場合は、ステップS17に進み、動作判定部42bにて、標準偏差σと閾値S2とを比較する。
σ<S2の場合は、ステップS18に進み、ダンプトラック2がアイドリング状態であると判定し、この判定結果と、標準偏差σと、時刻tαとを関連付けて、処理部42のメモリ等に記憶させる。
【0055】
σ≧S2の場合は、ステップS19に進み、ダンプトラック2が運転・稼働状態であると判定し、この判定結果と、標準偏差σと、時刻tαとを関連付けて、処理部42のメモリ等に記憶させる。
【0056】
ステップS16,S18,S19の後に、ステップS20に進み、時刻tαが加速度測定終了時刻tendであるか否かを判定する。
時刻tαが加速度測定終了時刻tendでなければ、ステップS21にて、時刻tαに所定の測定間隔Δtを加算した時刻tα+Δtを新たに設定して(図9参照)、ステップS13〜S20の処理を繰り返す。そして、時刻tαが加速度測定終了時刻tendになった時点で、ダンプトラック2の動作判定を終了する。
【0057】
従って、図8に示す動作判定フローにより、合成加速度aの標準偏差σの時系列データと、それに対応するダンプトラック2の動作状況の時系列データとを得ることができる。また、得られたこれら時系列データに基づいて、アイドリング状態の時間帯を把握することができ、更に、アイドリング状態の時間帯を裏付けるデータとして、合成加速度aの標準偏差σの時系列データを用いることができるので、アイドリングストップの履行状況の検証を簡易化することができる。尚、合成加速度aの標準偏差σの時系列データと、それに対応するダンプトラック2の動作状況の時系列データとは、表示部43にて表示されると共に、記録部44にて記録される。
【0058】
ところで、特許文献2には、車両の加速度の標準偏差を利用して、安全運転診断を行うことが記載されている。
しかしながら、特許文献2に記載の発明は、車両走行時に安全運転であったか否かを診断することが前提であり、それゆえ、車両が走行していないアイドリング時を対象として、車両の加速度の標準偏差に基づいて、車両がアイドリング状態か否かを判定するという思想はない。それゆえ、特許文献2に記載の発明では、安全運転であったか否かを判定するための加速度の標準偏差の閾値として、1つの閾値しか設定していない。
【0059】
この点、本発明者は、図4に示すように、合成加速度aの振幅のばらつき(具体的には、合成加速度aの標準偏差σ)について、「エンジン停止状態<アイドリング状態<走行・稼働状態」の関係が成り立っていることを見出し、この知見に基づいて、アイドリング状態であるか否かを判定するための閾値として、上述の閾値S1,S2を設定している。これは、特に重機を使用する建設作業においては、一定の作業サイクルを繰り返し実施することが多く、加速度振幅のばらつきを算定して所定の閾値を設定することで、アイドリング状態であるか、走行・稼働状態であるか、の判定が的確に実施できることが実証できたことによるものである。そして、設定された閾値S1,S2に基づいて、図8に示す動作判定フローを実行することにより、合成加速度aの標準偏差σの時系列データと、それに対応するダンプトラック2の動作状況の時系列データとを得、これら時系列データに基づいて、比較的安価かつ簡易な構成で、アイドリング状態の時間帯を把握することができる。
【0060】
本実施形態によれば、動作判定システム1は、エンジン(図示せず)を駆動源とするダンプトラック2と、このダンプトラック2に設置されてダンプトラック2の加速度を測定する加速度測定手段(加速度測定部36(加速度センサ)を備える携帯電話機3)と、ダンプトラック2がアイドリング状態であるか否かを判定するアイドリング判定手段(加速度測定情報生成部30a、ばらつき算出部42a、及び、動作判定部42b)を含んで構成される。ばらつき算出部42aは、加速度測定部36により測定された加速度に基づいて、加速度振幅のばらつき(合成加速度aの標準偏差σ)を算出する。動作判定部42bは、算出した加速度振幅のばらつき(合成加速度aの標準偏差σ)に基づいて、ダンプトラック2がアイドリング状態であるか否かを判定する。これにより、周波数分析器等の比較的高価な機器を用いることなく、比較的簡易な構成で、加速度の測定値に基づいて、ダンプトラック2がアイドリング状態であるか否かを示す客観的なデータとして、加速度振幅のばらつき(合成加速度aの標準偏差σ)のデータを得ることができる。
【0061】
また本実施形態によれば、加速度センサを備える携帯端末(携帯電話機3)が本発明における加速度測定手段としての機能を実現する。つまり、ダンプトラック2の加速度が、携帯端末の加速度センサにより測定される。このように加速度センサは携帯端末に搭載可能であり、それゆえ、建設工事に利用する場合の汎用性、適用性に優れている。
【0062】
また本実施形態によれば、加速度測定情報生成部30aは、加速度測定部36(3軸加速度センサ)により測定された3つの軸方向の加速度x,y,zを合成して合成加速度aとし、ばらつき算出部42aは、合成加速度aに基づいて、加速度振幅のばらつき(合成加速度aの標準偏差σ)を算出する。これにより、携帯電話機3のダンプトラック2に対する設置向きによらず、安定して、ダンプトラック2の加速度を測定することができるので、ダンプトラック2の動作判定のための加速度測定情報の取得を比較的容易に行うことができる。
【0063】
尚、本実施形態では、携帯電話機3の加速度測定情報生成部30aにて、合成加速度aを算出しているが、合成加速度aの算出箇所はこれに限らず、例えば、動作判定装置4のばらつき算出部42aにて、合成加速度aの標準偏差σを求める直前に、合成加速度aを算出するようにしてもよい。
【0064】
また、本実施形態では、携帯電話機3から動作判定装置4への加速度測定情報の伝達を、メモリーカード40を介して行っているが、情報の伝達方式はこれに限らず、例えば、携帯電話機3と動作判定装置4との各々に予め設けられたインターフェース部(図示せず)を信号線で電気接続し、この信号線を介して、加速度測定情報の伝達を行ってもよい。
【0065】
図10は、本発明の第2実施形態における重機のアイドリング判定システムの概略構成を示す。
図1に示した第1実施形態と異なる点について説明する。
【0066】
制御部30において、上述のばらつき算出部42a及び動作判定部42bの機能が実現されるように構成されている。すなわち、ダンプトラック2の加速度の測定から、ダンプトラック2の動作判定までを、携帯電話機3にて処理するように構成されている。
【0067】
また、本実施形態では、図8に示した動作判定フローを携帯電話機3にて実行する。このため、図8に示したステップS11にて、加速度測定情報を、加速度測定情報生成部30aから直接的に読込む。また、ステップS12では、動作判定の対象となる時刻tαとして、時計37の現在時刻より数秒前の時刻(例えば、現在時刻より上記b秒程度前の時刻)が設定される。更に、ステップS16,S18,S19における判定結果が、表示部35に表示される。これにより、上記b秒がわずか数秒に設定されている場合には、ダンプトラック2の運転者は、ダンプトラック2の上記ホルダーに取り付けられた携帯電話機3の表示部35を目視することにより、ダンプトラック2の動作状況を、ほぼリアルタイムで把握することができる。
【0068】
また、制御部30は、アイドリング状態の継続時間を算出し、この継続時間が予め設定された所定時間以上になると、表示部35にて、アイドリング状態が長期間にわたり継続している旨の注意喚起メッセージを自動発令するように構成され得る。また、この自動発令と同時に、呼出し部34にて、警告音及び/又は光を自動的に発するように構成され得る。
【0069】
特に本実施形態によれば、携帯電話機3の制御部30にて、ばらつき算出部42a及び動作判定部42bの機能が実現されることにより、ダンプトラック2の加速度の測定から、ダンプトラック2の動作判定までを、携帯電話機3にて処理することができるので、動作判定システム1の構成を簡素化することができる。
【0070】
尚、第1及び第2実施形態では、重機の一例としてダンプトラック2を採用して、重機の動作判定(特に、アイドリング判定)を説明したが、重機はこれに限らず、例えば、重機として、ダンプトラック以外の運搬車両、バックホー等の油圧ショベル、ブルドーザー、ロードローラー等の建設機械を採用して、上述の動作判定を行うことが可能である。
【0071】
また、第1及び第2実施形態では、携帯端末の一例として携帯電話機3を採用して、重機の動作判定(特に、アイドリング判定)を説明したが、携帯端末は重機等からの取り外し移動が容易な機器であればこれに限らず、例えば、携帯端末として、PHS、PDA、スマートフォン等を採用して、上述の動作判定を行うことが可能である。
【0072】
また、第1及び第2実施形態では、加速度測定手段の一例として、加速度センサを備える携帯端末(携帯電話機3)を採用して、重機の動作判定(特に、アイドリング判定)を説明したが、加速度測定手段は、重機の加速度が測定可能であり、かつ、重機に設置可能であれば、これに限らない。
【0073】
また、第1及び第2実施形態では、加速度振幅のばらつきとして、合成加速度aの標準偏差σを用いて説明したが、加速度振幅のばらつきはこれに限らず、例えば、加速度振幅のばらつきとして、合成加速度aの分散σ2を用いることも可能である。
【符号の説明】
【0074】
1 動作判定システム(アイドリング判定システム)
2 ダンプトラック(重機)
3 携帯電話機(携帯端末)
4 動作判定装置
21 車両
21a 運転席
21b シャーシ
21c 前輪
21d 後輪
22 荷台
30 制御部
30a 加速度測定情報生成部
31 送受信部
32 記憶部
33 操作部
34 呼出し部
35 表示部
36 加速度測定部
37 時計
38 アンテナ
39 カード装着部
40 メモリーカード
41 カード装着部
42 処理部
42a ばらつき算出部
42b 動作判定部
43 表示部
44 記録部
【特許請求の範囲】
【請求項1】
エンジンを駆動源とする重機に、加速度測定手段を設置し、
前記重機の加速度を、前記加速度測定手段により測定し、
この測定した加速度に基づいて、加速度振幅のばらつきを算出し、
この算出した加速度振幅のばらつきに基づいて、前記重機がアイドリング状態であるか否かを判定する、
重機のアイドリング判定方法。
【請求項2】
前記加速度測定手段は、加速度センサを備える携帯端末であり、
前記重機の加速度を、前記加速度センサにより測定する、請求項1記載の重機のアイドリング判定方法。
【請求項3】
前記加速度センサは3軸加速度センサであり、
この3軸加速度センサにより測定した3つの軸方向の加速度を合成し、
この合成した加速度に基づいて、加速度振幅のばらつきを算出する、請求項2記載の重機のアイドリング判定方法。
【請求項4】
エンジンを駆動源とする重機と、
この重機に設置されて前記重機の加速度を測定する加速度測定手段と、
前記重機がアイドリング状態であるか否かを判定するアイドリング判定手段と、
を含んで構成され、
前記アイドリング判定手段は、前記加速度測定手段により測定された前記重機の加速度に基づいて、加速度振幅のばらつきを算出し、この算出した加速度振幅のばらつきに基づいて、前記重機がアイドリング状態であるか否かを判定する、重機のアイドリング判定システム。
【請求項5】
前記加速度測定手段は、加速度センサを備える携帯端末であり、
前記重機の加速度は、前記加速度センサにより測定される、請求項4記載の重機のアイドリング判定システム。
【請求項6】
前記加速度センサは3軸加速度センサであり、
前記アイドリング判定手段は、前記3軸加速度センサにより測定された3つの軸方向の加速度を合成し、この合成した加速度に基づいて、加速度振幅のばらつきを算出する、請求項5記載の重機のアイドリング判定システム。
【請求項1】
エンジンを駆動源とする重機に、加速度測定手段を設置し、
前記重機の加速度を、前記加速度測定手段により測定し、
この測定した加速度に基づいて、加速度振幅のばらつきを算出し、
この算出した加速度振幅のばらつきに基づいて、前記重機がアイドリング状態であるか否かを判定する、
重機のアイドリング判定方法。
【請求項2】
前記加速度測定手段は、加速度センサを備える携帯端末であり、
前記重機の加速度を、前記加速度センサにより測定する、請求項1記載の重機のアイドリング判定方法。
【請求項3】
前記加速度センサは3軸加速度センサであり、
この3軸加速度センサにより測定した3つの軸方向の加速度を合成し、
この合成した加速度に基づいて、加速度振幅のばらつきを算出する、請求項2記載の重機のアイドリング判定方法。
【請求項4】
エンジンを駆動源とする重機と、
この重機に設置されて前記重機の加速度を測定する加速度測定手段と、
前記重機がアイドリング状態であるか否かを判定するアイドリング判定手段と、
を含んで構成され、
前記アイドリング判定手段は、前記加速度測定手段により測定された前記重機の加速度に基づいて、加速度振幅のばらつきを算出し、この算出した加速度振幅のばらつきに基づいて、前記重機がアイドリング状態であるか否かを判定する、重機のアイドリング判定システム。
【請求項5】
前記加速度測定手段は、加速度センサを備える携帯端末であり、
前記重機の加速度は、前記加速度センサにより測定される、請求項4記載の重機のアイドリング判定システム。
【請求項6】
前記加速度センサは3軸加速度センサであり、
前記アイドリング判定手段は、前記3軸加速度センサにより測定された3つの軸方向の加速度を合成し、この合成した加速度に基づいて、加速度振幅のばらつきを算出する、請求項5記載の重機のアイドリング判定システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−44317(P2013−44317A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−184875(P2011−184875)
【出願日】平成23年8月26日(2011.8.26)
【出願人】(000001373)鹿島建設株式会社 (1,387)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月26日(2011.8.26)
【出願人】(000001373)鹿島建設株式会社 (1,387)
【Fターム(参考)】
[ Back to top ]