
重機制御装置
【課題】深海でも重機を含めた俯瞰地形を測定して重機の位置や重機周辺の地形を把握できる。
【解決手段】重機制御装置1は、海底を移動可能な採鉱機2を第一のアンビリカントケーブル4Aを介して母船3に接続した。採鉱機2から第二のアンビリカントケーブル4Bを介して上方に浮体7を接続して浮かせ、浮体7の下側にソナーヘッド8を備えた。ソナーヘッド8は超音波を発振してその反射によってエコー画像を得て、採鉱機2または/及びその周辺の地形を監視する。エコー画像は第二及び第一のアンビリカントケーブル4B、4Aを介して母船で受信できる。第二のアンビリカントケーブル4Bは採鉱機2に設けたウインチに巻き取り可能に取り付け、巻き取りと繰り出しによってソナーヘッド8の高さを調整できる。
【解決手段】重機制御装置1は、海底を移動可能な採鉱機2を第一のアンビリカントケーブル4Aを介して母船3に接続した。採鉱機2から第二のアンビリカントケーブル4Bを介して上方に浮体7を接続して浮かせ、浮体7の下側にソナーヘッド8を備えた。ソナーヘッド8は超音波を発振してその反射によってエコー画像を得て、採鉱機2または/及びその周辺の地形を監視する。エコー画像は第二及び第一のアンビリカントケーブル4B、4Aを介して母船で受信できる。第二のアンビリカントケーブル4Bは採鉱機2に設けたウインチに巻き取り可能に取り付け、巻き取りと繰り出しによってソナーヘッド8の高さを調整できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、海底等の水底で掘削や採鉱等のために作業する採鉱機等の重機や重機周辺の地形等を監視するための監視手段を備えた重機制御装置に関する。
【背景技術】
【0002】
近年、海底に埋設されている鉱床が日本の排他的経済海域で多数発見されており、これらの鉱床の開発が進められている。このような海底の鉱床の掘削に際しては、1000m以上と深い海域が多いため、無人の採鉱機等を海底に設置して掘削し、この採鉱機を海上に浮かべた母船で遠隔制御するようにしている。
海底における掘削重機の運転制御においては、海上にある母船から遠隔制御によって海底地形に対応した走行により、目的とする鉱床への到達や掘削の際の掘削刃の走査や集鉱装置での集鉱をしながら走行制御を行うことになる。
【0003】
このような海底で作業する採鉱機の遠隔による運転制御に関して、様々な技術が提案されている。例えば特許文献1に記載された無索無人水中掘削機では、この掘削機本体にカッタと吸泥管を備えたラダーが配設され、ラダーの先端には超音波ソナーが設けられている。そして、超音波ソナーで掘削の状況を監視し、母船から超音波通信による遠隔操作で掘削が制御されている。ナローマルチビーム測深ソナーによって母船から掘削状況を直接監視することも提案されている。
また、超音波ソナーに代えて水中テレビカメラと照明器を備えて掘削機周辺の地形や掘削状況を監視するようにしたものもある。
【0004】
また、特許文献2に記載された水中位置測定装置では、水中を移動しながら浚渫工事を行う水中施工機械に送波器が取り付けられ、海面上の測定船には受波器が取り付けられている。水中施工機械の送波器から超音波を送信し、測定船の位置がGPS測位される受波器によって受信され、送波器の三次元座標と超音波の水中伝播速度を得て、水中施工機械の送波器の三次元座標を正確に測定できるようにしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−212734号公報
【特許文献2】特開2004−191125号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、海底で掘削機を制御する場合、掘削機の走行と掘削のために周りの安全確保や周囲危険物を察知する必要がある。
上述した特許文献1に記載された無索無人水中掘削機では、海上にある母船から音波を発生させて超音波ソナーによる掘削状況の監視を行い、また海底地形の探索を行って海底での反射を利用してその伝播を解析し地形を把握する。しかしながら、水深1000m以上の深海であると母船から超音波通信による遠隔操作は反射エコーの減衰や伝播範囲が広すぎる等の理由によって分解能不足となり、海底地形の探索や掘削機の運転制御ができないという欠点が生じる。また、同一の理由により、母船からナローマルチビーム測深ソナーによる掘削状況の監視もできない。
【0007】
また、掘削機に設けた水中テレビカメラで掘削機や海底の掘削箇所を撮影して母船で監視する場合でも、掘削によって海底沈殿物や掘削粉塵等が舞い上がると撮影画像では掘削機や海底の掘削箇所等が見えなくなるという欠点が生じる。
また、特許文献2に記載された水中位置測定装置は、超音波によって水中施工機械に取り付けた送波器の三次元座標を測定するものにすぎないから、海底の地形や掘削状況を把握することはできなかった。しかも、この場合でも、水深が大きくなると送波機と受波機との距離が増大して分解能が低下し、水中施工機械の送波器の三次元座標を測定できなかった。しかも、この場合でも、水深が深くなると分解能が低下して三次元座標を測定できないという欠点がある。
【0008】
本発明は、このような事情を鑑みてなされたものであり、深海でも重機を含めた俯瞰地形を測定して重機の位置や重機周辺の地形を把握できるようにした重機制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明による重機制御装置は、水底を移動可能な重機と、該重機からケーブルを介して上方に支持された浮体と、浮体またはケーブルに設けられていて重機または/及びその周辺の地形を監視する監視手段とを備えたことを特徴とする。
本発明による重機制御装置によれば、重機に直接監視手段を取り付けたりせず、ケーブルを介して浮体によって重機の上方に離間した高い位置に監視手段を設置できるから、監視手段によって重機やその近傍の地形だけでなく重機を含む周辺の水底地形等や掘削状況等の画像を俯瞰画像として把握できて、障害物等を避けて安全な重機の操縦ができる。また、比較的重機に近接した高い位置に監視手段を設置した場合には重機の監視したい部分や重機による鉱床等の掘削状況等を近接した拡大画像として監視できる。
しかも、監視手段がソナー等の場合には監視手段と重機や周辺地形との間で必要な分解能を得ることができ、また監視手段がカメラ等の撮影手段の場合には重機周辺で海底沈殿物や掘削粉塵等が舞い上がっても重機とその周辺の地形を俯瞰状態の画像として得られるため、重機の位置や姿勢、重機周囲の地形や掘削状況等の画像を俯瞰して得ることができる。
そのため、従来のこの種の装置のように重機に監視手段を設けた場合、水深が深いと監視手段と母船との間で必要な分解能が得られなかったり重機と周辺地形との状況を監視できなかったり、重機の移動時や掘削時等に海底沈殿物や掘削粉塵等が舞い上がると撮影手段で撮影した画像の視界が遮断されたりする不具合が生じない。この場合、監視手段と母船との間の画像の伝送はケーブルを介して行うことが好ましい。
また、監視手段の俯瞰高度をより高く設定することで鉱区全体の地形を把握することができて掘削計画を立てることができる。
【0010】
また、浮体またはケーブルに取り付けられた監視手段はその高さを調整する高さ調整手段を有していることが好ましい。
高さ調整手段によって浮体または浮体近傍のケーブルに設けられた監視手段の重機からの高さを変更することで、重機からより高く離れた俯瞰状態では、重機の位置や姿勢、そして重機周囲の地形や掘削状況等の俯瞰画像を得ることができる。また、重機により接近した高さ状態では、分解能がより高くなる等してより拡大した重機の位置や姿勢、重機周囲の地形や掘削状況等の画像を得ることができる。
【0011】
また、高さ調整手段はケーブルの巻き取りと巻き出しを行うことで昇降させるウインチであってもよい。
高さ調整手段をウインチによって構成することで、ケーブルを巻き取ると浮体またはケーブルに設けた監視手段を重機により近接した高さ位置に保持でき、ウインチからケーブルを繰り出すと浮体の浮力で上昇するから監視手段を重機からより離間した高さ位置に保持できる。
【発明の効果】
【0012】
本発明による重機制御装置によれば、重機からケーブルを介して浮体を上方に支持し、浮体またはケーブルに監視手段を備えたから、監視手段が重機から離間した高い位置では、重機近傍の水底地形等だけでなく重機を含む周辺の水底地形や掘削状況等を俯瞰画像として把握できるので、障害物を避けて安全な重機の操縦や効率的な掘削や集鉱等を行える。また、比較的重機に近接した位置では重機の監視したい部分や重機による鉱床等の掘削状況等を近接した拡大画像として観察できる。
また、水深が深い場合でも監視手段と重機や水底地形等との間で必要な分解能が得ることができたり、重機近傍で海底沈殿物や掘削粉塵等が舞い上がっても重機とその近傍の地形を俯瞰画像として得られるため、重機の位置や姿勢、重機周囲の地形や掘削状況等の画像を俯瞰して得ることができる。
また、更に監視手段による俯瞰高度を高くすることで鉱区全体の地形を把握することができて掘削計画を立てることができる。
【0013】
浮体またはケーブルに取り付けられた監視手段はその高さを調整する高さ調整手段を有しているから、高さ調整手段によって監視手段の重機からの高さを変更することで、重機からより高く離れた俯瞰状態では、重機の位置や姿勢、そして重機周囲の地形や掘削状況等の俯瞰画像を得ることができる。また、重機により接近した高さ状態では、分解能がより高くなる等してより拡大した重機の位置や姿勢、重機周囲の地形や掘削状況等の画像を得ることができる。
【0014】
また、高さ調整手段はケーブルの巻き取りと巻き出しを行うことで昇降させるウインチであるから、ケーブルを巻き取ると浮体またはケーブルに設けた監視手段を重機により近接した高さ位置に保持でき、ウインチからケーブルを繰り出すと浮体の浮力で上昇するから監視手段を重機からより離間した高さ位置に保持できる。
【図面の簡単な説明】
【0015】
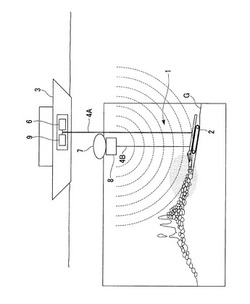
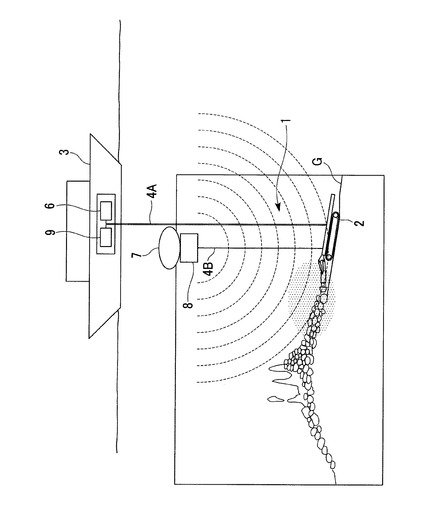
【図1】本発明の実施形態による採鉱機とソナーヘッドと母船との関係を示す制御システムを示す図である。
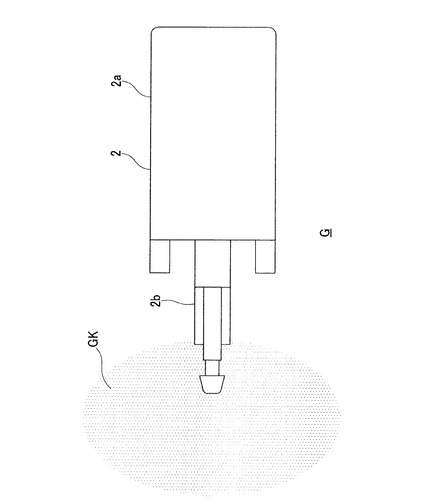
【図2】図1に示す採鉱機とその掘削状態を示す平面図である。
【図3】採鉱機に設けた浮体とセンサーヘッド及びウインチとの関係を示す説明図である。
【発明を実施するための形態】
【0016】
以下、添付図面を参照して、本発明の実施形態による重機制御装置について説明する。
図1及び図2に示す重機制御装置1は、海底Gに載置した重機として例えば採鉱機2と海上に浮かぶ母船3とが第一のアンビリカントケーブル4Aを介して接続されている。採鉱機2は海底Gを地形に応じて走行し、海底に形成された鉱床GKから掘削刃を走査させて掘削して図示しない集鉱装置で集鉱するようにしている。採鉱機2の走行や掘削等は、母船3内に設けた操作制御手段6をオペレータが操作することで、第一のアンビリカントケーブル4Aを介して電気信号を採鉱機2に伝達して遠隔操作することができる。
また、採鉱機2には例えば採鉱機本体2aから延びるシリンダによって伸縮可能なアーム部2bの先端に掘削刃が設けられている。
【0017】
採鉱機2には、母船3に接続されるものとは別の第二のアンビリカントケーブル4Bの一端が接続されており、その他端にはブイ等の浮体7が接続されている。第二のアンビリカントケーブル4Bは浮体7の浮力によって採鉱機2の上方に延びている。
そして、この浮体7の下面には、監視手段として例えば超音波を発振して採鉱機2や採鉱機周辺の海底地形を計測するためのソナーヘッド8が設けられている。ソナーヘッド8は下方である採鉱機2の方向に向けて設置されており、超音波が下方の採鉱機2や周辺の海底地形に向けて発振するように設定されている。
【0018】
図1及び図3に示すソナーヘッド8内には図示しない送信機と受信機が備え付けられており、送信機から超音波を発振して採鉱機2や採鉱機周辺の海底地形で反射した超音波を受信機で計測し、その伝搬を解析して採鉱機2や採鉱機周辺の海底地形のエコー画像として得ることができる。また、ソナーヘッド8では、計測したエコー画像を電気信号に変換し、第二のアンビリカントケーブル4Bと母船3に接続されている第一のアンビリカントケーブル4Aを介して母船3内の制御手段9に送信できて図示しないディスプレイで観察できるようになっている。そのため、採鉱機2と母船3との距離による超音波信号の減衰等の影響を受けることなくエコー画像を入手できる。
【0019】
また、図3に示すように、第二のアンビリカントケーブル4Bの採鉱機2側の一端部には、ソナーヘッド8の高さ調整手段として例えばウインチ11が設けられている。ウインチ11によってアンビリカントケーブル4Bを軸11aに巻き取ることで浮体7及びソナーヘッド8を降下させてその高さを低くすることができ、逆にアンカビリカントケーブル4Bを軸11aから繰り出すことで浮体7の浮力により浮体7とソナーヘッド8を上昇させてその高さを高くすることができる。
ソナーヘッド8の高さを低くすることでソナーヘッド8と採鉱機2や採鉱機周辺の海底地形との距離が減少し、分解能が向上する。逆に、ソナーヘッド8の高さを高くすることでソナーヘッド8と採鉱機2や採鉱機周辺の海底地形との距離が増大し、分解能が比較的低下する。
【0020】
本実施形態による重機制御装置1は上述の構成を備えているから、母船3の操作制御手段6をオペレータが操作することで、海底に載置された採鉱機2を走行させて鉱床に移動させる。その際、浮体7とソナーヘッド8は例えば比較的高い俯瞰位置に保持するものとする。
そして、ソナーヘッド8から発振する超音波が採鉱機2と採鉱機周辺の海底地形とで反射され、これを受信することで採鉱機2を含めた周辺の海底地形のエコー画像を得ることができる。このエコー画像は電気信号に変換されて第二のアンビリカントケーブル4B及び第一のアンビリカントケーブル4Aを介して母船3の制御手段9によってエコー画像を受信でき、採鉱機2を含む周辺の海底地形を把握することができる。
こうして、海底地形の俯瞰画像により、採鉱機2の走行に際して障害物を避けたりして採鉱機2の進行方向を決定し、鉱床の掘削領域決定の情報を得られる。
【0021】
そして、採鉱機2が目的とする鉱床に到達することで、採鉱機2の掘削刃を走査させて掘削を行い、集鉱装置で集鉱する。掘削状況の把握に際して、ウインチ11で第二のアンビリカントケーブル4Bを巻き取ることで浮体7とソナーヘッド8は海底Gからの高さが低くなるので、ソナーヘッド8と採鉱機2の掘削刃で掘削される鉱区の地形との距離が小さくなるので、受信されるエコー画像の分解能が向上する。これにより、母船3内のオペレータは掘削刃による掘削状況を把握しながら掘削刃の走査を精度良く制御できることになる。
【0022】
上述のように本実施形態による重機制御装置1によれば、採鉱機2に直接ソナーヘッド8を取り付けたりせず、第二のアンビリカントケーブル4Bを介して浮体7によって採鉱機2の上方に離間してソナーヘッド8を設置できるから、採鉱機2近傍の海底地形だけでなく、採鉱機2を含む周辺の海底地形を俯瞰画像として把握できるので、障害物を避けて安全な採鉱機2の操縦ができる。
また、採鉱機2に高さ調整手段としてウインチ11を設置してソナーヘッド8の高さを調整できるようにしたから、ソナーヘッド8が採鉱機2から離れた高い位置では採鉱機2を含む周辺の海底地形を俯瞰画像として把握できると共に、ソナーヘッド8が採鉱機2に近い比較的低い高さ位置では採鉱機2の掘削刃の走査状況や鉱床の状況等を拡大されたエコー画像として把握することができる。
【0023】
また、ソナーヘッド8で入手した画像は、電気信号に変換して第二のアンビリカントケーブル4Bと第一のアンビリカントケーブル4Aを介して母船3へ送信できるから、従来のように母船3から発振する超音波によって海底Gでの地形や採鉱機2のエコー画像を把握するシステムでないため、1000mを超える深海であっても反射エコーの減衰や伝搬範囲の拡大などによる分解能不足を来すことがなく高い分解能の画像を得られる。
しかも、超音波の発振と反射による受信はソナーヘッド8と採鉱機2や周辺の海底地形との間で行われるため、比較的距離が短く超音波の減衰等の影響を受けずにエコー画像を得られる。また、ソナーヘッド8の高さを低くする場合には、対象物との距離が短くなるためエコー画像の分解能が向上することになる。
このように、本実施形態によれば、堆積物の舞い上がる採鉱機2の走行時や掘削作業等においても、採鉱機2やその近傍の海底地形や掘削状況等を観察できる上に、掘削すべき地山の形状と掘削刃との距離をリアルタイムで把握することができて、効率的な掘削を行える。更に、ソナーヘッド8の俯瞰高度を高く上げることで鉱区全体の地形等を把握できて掘削計画を立てることができるようになる。
【0024】
なお、本発明は上述の実施形態に限定されることなく、本発明の要旨を変更しない範囲で上述した実施形態の構成を適宜変更することができる。
例えば、上述した実施形態では、監視手段としてソナーヘッド8を採用したが、ソナーヘッド8に代えて例えば撮影手段として水中カメラを採用してもよい。この場合、海底は暗いので照明手段を設置することが好ましい。
監視手段として水中カメラを採用した場合、従来、採鉱機2に直接取り付ける構成であるため、採鉱機2の走行や掘削刃による掘削の際に堆積物や掘削粉の塵等が舞い上がり、可視光線による視界が遮られて撮影画像の映りが悪くなる。この場合でも、本発明による重機制御装置1によれば、第二のアンビリカントケーブル4Bを延ばして採鉱機2から離間した高所に水中カメラが配設されるため、堆積物や掘削粉の塵等の舞い上がりのない領域も含めて俯瞰撮影することができるので、採鉱機2を含めた周辺の地形の画像を得られて地形の状況や掘削の状況を把握できる。
【0025】
なお、本発明において、ソナーヘッド8や水中カメラ等の監視手段を採鉱機2から離間して設置する場合、その距離は例えば次のように設置できる。
まず、採鉱機2で海底Gの鉱床GKを掘削する場合には、掘削刃として掘削ドリルを鉱床GKの鉱脈にあわせて操作、制御する必要がある。すなわち、掘削ドリルがどの程度鉱脈に接触しているのか、また掘削痕がどの程度あるのかなどを判定するためには少なくとも10センチ程度の分解能が好ましい。この程度の分解能を得るためのソナーヘッド8や水中カメラとの離隔距離として、装置の特性にもよるが、例えば5mから10m程度離隔距離があればよい。
【0026】
また、採鉱機2が鉱区内を移動するための運転を制御する場合、例えば一つの場所での掘削が終了して次の掘削予定場所へ移動する運転には、採鉱機2の幅と長さが例えば5m程度とすると、キャタピラなどが海底Gの割れ目にはまって動けなくならないように障害物をさけて走行する必要がある。このときソナーヘッド8や水中カメラに必要な分解能は50センチ程度と想定され、この程度の分解能を得るためのソナーヘッド8や水中カメラとの離隔距離として、例えば10mから50m程度離隔距離があればよい。監視手段としてソナーヘッド8や水中カメラ以外のものを用いてもよい。
【0027】
また、上述の実施形態では、鉱床を掘削する重機として採鉱機2を用いたが、掘削機等、他の適宜の重機を採用してもよいことはいうまでもない。
また、高さ調整手段はウインチ11に限定されることなく各種の手段を採用でき、第一のアンビリカントケーブル4A、第二のアンビリカントケーブル4Bについても電気信号を伝送可能であれば各種のケーブルを使用できる。
【符号の説明】
【0028】
1 重機制御装置
2 採鉱機
3 母船
4A 第一のアンビリカントケーブル
4B 第二のアンビリカントケーブル
7 浮体
8 ソナーヘッド
11 ウインチ
【技術分野】
【0001】
本発明は、海底等の水底で掘削や採鉱等のために作業する採鉱機等の重機や重機周辺の地形等を監視するための監視手段を備えた重機制御装置に関する。
【背景技術】
【0002】
近年、海底に埋設されている鉱床が日本の排他的経済海域で多数発見されており、これらの鉱床の開発が進められている。このような海底の鉱床の掘削に際しては、1000m以上と深い海域が多いため、無人の採鉱機等を海底に設置して掘削し、この採鉱機を海上に浮かべた母船で遠隔制御するようにしている。
海底における掘削重機の運転制御においては、海上にある母船から遠隔制御によって海底地形に対応した走行により、目的とする鉱床への到達や掘削の際の掘削刃の走査や集鉱装置での集鉱をしながら走行制御を行うことになる。
【0003】
このような海底で作業する採鉱機の遠隔による運転制御に関して、様々な技術が提案されている。例えば特許文献1に記載された無索無人水中掘削機では、この掘削機本体にカッタと吸泥管を備えたラダーが配設され、ラダーの先端には超音波ソナーが設けられている。そして、超音波ソナーで掘削の状況を監視し、母船から超音波通信による遠隔操作で掘削が制御されている。ナローマルチビーム測深ソナーによって母船から掘削状況を直接監視することも提案されている。
また、超音波ソナーに代えて水中テレビカメラと照明器を備えて掘削機周辺の地形や掘削状況を監視するようにしたものもある。
【0004】
また、特許文献2に記載された水中位置測定装置では、水中を移動しながら浚渫工事を行う水中施工機械に送波器が取り付けられ、海面上の測定船には受波器が取り付けられている。水中施工機械の送波器から超音波を送信し、測定船の位置がGPS測位される受波器によって受信され、送波器の三次元座標と超音波の水中伝播速度を得て、水中施工機械の送波器の三次元座標を正確に測定できるようにしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−212734号公報
【特許文献2】特開2004−191125号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、海底で掘削機を制御する場合、掘削機の走行と掘削のために周りの安全確保や周囲危険物を察知する必要がある。
上述した特許文献1に記載された無索無人水中掘削機では、海上にある母船から音波を発生させて超音波ソナーによる掘削状況の監視を行い、また海底地形の探索を行って海底での反射を利用してその伝播を解析し地形を把握する。しかしながら、水深1000m以上の深海であると母船から超音波通信による遠隔操作は反射エコーの減衰や伝播範囲が広すぎる等の理由によって分解能不足となり、海底地形の探索や掘削機の運転制御ができないという欠点が生じる。また、同一の理由により、母船からナローマルチビーム測深ソナーによる掘削状況の監視もできない。
【0007】
また、掘削機に設けた水中テレビカメラで掘削機や海底の掘削箇所を撮影して母船で監視する場合でも、掘削によって海底沈殿物や掘削粉塵等が舞い上がると撮影画像では掘削機や海底の掘削箇所等が見えなくなるという欠点が生じる。
また、特許文献2に記載された水中位置測定装置は、超音波によって水中施工機械に取り付けた送波器の三次元座標を測定するものにすぎないから、海底の地形や掘削状況を把握することはできなかった。しかも、この場合でも、水深が大きくなると送波機と受波機との距離が増大して分解能が低下し、水中施工機械の送波器の三次元座標を測定できなかった。しかも、この場合でも、水深が深くなると分解能が低下して三次元座標を測定できないという欠点がある。
【0008】
本発明は、このような事情を鑑みてなされたものであり、深海でも重機を含めた俯瞰地形を測定して重機の位置や重機周辺の地形を把握できるようにした重機制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明による重機制御装置は、水底を移動可能な重機と、該重機からケーブルを介して上方に支持された浮体と、浮体またはケーブルに設けられていて重機または/及びその周辺の地形を監視する監視手段とを備えたことを特徴とする。
本発明による重機制御装置によれば、重機に直接監視手段を取り付けたりせず、ケーブルを介して浮体によって重機の上方に離間した高い位置に監視手段を設置できるから、監視手段によって重機やその近傍の地形だけでなく重機を含む周辺の水底地形等や掘削状況等の画像を俯瞰画像として把握できて、障害物等を避けて安全な重機の操縦ができる。また、比較的重機に近接した高い位置に監視手段を設置した場合には重機の監視したい部分や重機による鉱床等の掘削状況等を近接した拡大画像として監視できる。
しかも、監視手段がソナー等の場合には監視手段と重機や周辺地形との間で必要な分解能を得ることができ、また監視手段がカメラ等の撮影手段の場合には重機周辺で海底沈殿物や掘削粉塵等が舞い上がっても重機とその周辺の地形を俯瞰状態の画像として得られるため、重機の位置や姿勢、重機周囲の地形や掘削状況等の画像を俯瞰して得ることができる。
そのため、従来のこの種の装置のように重機に監視手段を設けた場合、水深が深いと監視手段と母船との間で必要な分解能が得られなかったり重機と周辺地形との状況を監視できなかったり、重機の移動時や掘削時等に海底沈殿物や掘削粉塵等が舞い上がると撮影手段で撮影した画像の視界が遮断されたりする不具合が生じない。この場合、監視手段と母船との間の画像の伝送はケーブルを介して行うことが好ましい。
また、監視手段の俯瞰高度をより高く設定することで鉱区全体の地形を把握することができて掘削計画を立てることができる。
【0010】
また、浮体またはケーブルに取り付けられた監視手段はその高さを調整する高さ調整手段を有していることが好ましい。
高さ調整手段によって浮体または浮体近傍のケーブルに設けられた監視手段の重機からの高さを変更することで、重機からより高く離れた俯瞰状態では、重機の位置や姿勢、そして重機周囲の地形や掘削状況等の俯瞰画像を得ることができる。また、重機により接近した高さ状態では、分解能がより高くなる等してより拡大した重機の位置や姿勢、重機周囲の地形や掘削状況等の画像を得ることができる。
【0011】
また、高さ調整手段はケーブルの巻き取りと巻き出しを行うことで昇降させるウインチであってもよい。
高さ調整手段をウインチによって構成することで、ケーブルを巻き取ると浮体またはケーブルに設けた監視手段を重機により近接した高さ位置に保持でき、ウインチからケーブルを繰り出すと浮体の浮力で上昇するから監視手段を重機からより離間した高さ位置に保持できる。
【発明の効果】
【0012】
本発明による重機制御装置によれば、重機からケーブルを介して浮体を上方に支持し、浮体またはケーブルに監視手段を備えたから、監視手段が重機から離間した高い位置では、重機近傍の水底地形等だけでなく重機を含む周辺の水底地形や掘削状況等を俯瞰画像として把握できるので、障害物を避けて安全な重機の操縦や効率的な掘削や集鉱等を行える。また、比較的重機に近接した位置では重機の監視したい部分や重機による鉱床等の掘削状況等を近接した拡大画像として観察できる。
また、水深が深い場合でも監視手段と重機や水底地形等との間で必要な分解能が得ることができたり、重機近傍で海底沈殿物や掘削粉塵等が舞い上がっても重機とその近傍の地形を俯瞰画像として得られるため、重機の位置や姿勢、重機周囲の地形や掘削状況等の画像を俯瞰して得ることができる。
また、更に監視手段による俯瞰高度を高くすることで鉱区全体の地形を把握することができて掘削計画を立てることができる。
【0013】
浮体またはケーブルに取り付けられた監視手段はその高さを調整する高さ調整手段を有しているから、高さ調整手段によって監視手段の重機からの高さを変更することで、重機からより高く離れた俯瞰状態では、重機の位置や姿勢、そして重機周囲の地形や掘削状況等の俯瞰画像を得ることができる。また、重機により接近した高さ状態では、分解能がより高くなる等してより拡大した重機の位置や姿勢、重機周囲の地形や掘削状況等の画像を得ることができる。
【0014】
また、高さ調整手段はケーブルの巻き取りと巻き出しを行うことで昇降させるウインチであるから、ケーブルを巻き取ると浮体またはケーブルに設けた監視手段を重機により近接した高さ位置に保持でき、ウインチからケーブルを繰り出すと浮体の浮力で上昇するから監視手段を重機からより離間した高さ位置に保持できる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施形態による採鉱機とソナーヘッドと母船との関係を示す制御システムを示す図である。
【図2】図1に示す採鉱機とその掘削状態を示す平面図である。
【図3】採鉱機に設けた浮体とセンサーヘッド及びウインチとの関係を示す説明図である。
【発明を実施するための形態】
【0016】
以下、添付図面を参照して、本発明の実施形態による重機制御装置について説明する。
図1及び図2に示す重機制御装置1は、海底Gに載置した重機として例えば採鉱機2と海上に浮かぶ母船3とが第一のアンビリカントケーブル4Aを介して接続されている。採鉱機2は海底Gを地形に応じて走行し、海底に形成された鉱床GKから掘削刃を走査させて掘削して図示しない集鉱装置で集鉱するようにしている。採鉱機2の走行や掘削等は、母船3内に設けた操作制御手段6をオペレータが操作することで、第一のアンビリカントケーブル4Aを介して電気信号を採鉱機2に伝達して遠隔操作することができる。
また、採鉱機2には例えば採鉱機本体2aから延びるシリンダによって伸縮可能なアーム部2bの先端に掘削刃が設けられている。
【0017】
採鉱機2には、母船3に接続されるものとは別の第二のアンビリカントケーブル4Bの一端が接続されており、その他端にはブイ等の浮体7が接続されている。第二のアンビリカントケーブル4Bは浮体7の浮力によって採鉱機2の上方に延びている。
そして、この浮体7の下面には、監視手段として例えば超音波を発振して採鉱機2や採鉱機周辺の海底地形を計測するためのソナーヘッド8が設けられている。ソナーヘッド8は下方である採鉱機2の方向に向けて設置されており、超音波が下方の採鉱機2や周辺の海底地形に向けて発振するように設定されている。
【0018】
図1及び図3に示すソナーヘッド8内には図示しない送信機と受信機が備え付けられており、送信機から超音波を発振して採鉱機2や採鉱機周辺の海底地形で反射した超音波を受信機で計測し、その伝搬を解析して採鉱機2や採鉱機周辺の海底地形のエコー画像として得ることができる。また、ソナーヘッド8では、計測したエコー画像を電気信号に変換し、第二のアンビリカントケーブル4Bと母船3に接続されている第一のアンビリカントケーブル4Aを介して母船3内の制御手段9に送信できて図示しないディスプレイで観察できるようになっている。そのため、採鉱機2と母船3との距離による超音波信号の減衰等の影響を受けることなくエコー画像を入手できる。
【0019】
また、図3に示すように、第二のアンビリカントケーブル4Bの採鉱機2側の一端部には、ソナーヘッド8の高さ調整手段として例えばウインチ11が設けられている。ウインチ11によってアンビリカントケーブル4Bを軸11aに巻き取ることで浮体7及びソナーヘッド8を降下させてその高さを低くすることができ、逆にアンカビリカントケーブル4Bを軸11aから繰り出すことで浮体7の浮力により浮体7とソナーヘッド8を上昇させてその高さを高くすることができる。
ソナーヘッド8の高さを低くすることでソナーヘッド8と採鉱機2や採鉱機周辺の海底地形との距離が減少し、分解能が向上する。逆に、ソナーヘッド8の高さを高くすることでソナーヘッド8と採鉱機2や採鉱機周辺の海底地形との距離が増大し、分解能が比較的低下する。
【0020】
本実施形態による重機制御装置1は上述の構成を備えているから、母船3の操作制御手段6をオペレータが操作することで、海底に載置された採鉱機2を走行させて鉱床に移動させる。その際、浮体7とソナーヘッド8は例えば比較的高い俯瞰位置に保持するものとする。
そして、ソナーヘッド8から発振する超音波が採鉱機2と採鉱機周辺の海底地形とで反射され、これを受信することで採鉱機2を含めた周辺の海底地形のエコー画像を得ることができる。このエコー画像は電気信号に変換されて第二のアンビリカントケーブル4B及び第一のアンビリカントケーブル4Aを介して母船3の制御手段9によってエコー画像を受信でき、採鉱機2を含む周辺の海底地形を把握することができる。
こうして、海底地形の俯瞰画像により、採鉱機2の走行に際して障害物を避けたりして採鉱機2の進行方向を決定し、鉱床の掘削領域決定の情報を得られる。
【0021】
そして、採鉱機2が目的とする鉱床に到達することで、採鉱機2の掘削刃を走査させて掘削を行い、集鉱装置で集鉱する。掘削状況の把握に際して、ウインチ11で第二のアンビリカントケーブル4Bを巻き取ることで浮体7とソナーヘッド8は海底Gからの高さが低くなるので、ソナーヘッド8と採鉱機2の掘削刃で掘削される鉱区の地形との距離が小さくなるので、受信されるエコー画像の分解能が向上する。これにより、母船3内のオペレータは掘削刃による掘削状況を把握しながら掘削刃の走査を精度良く制御できることになる。
【0022】
上述のように本実施形態による重機制御装置1によれば、採鉱機2に直接ソナーヘッド8を取り付けたりせず、第二のアンビリカントケーブル4Bを介して浮体7によって採鉱機2の上方に離間してソナーヘッド8を設置できるから、採鉱機2近傍の海底地形だけでなく、採鉱機2を含む周辺の海底地形を俯瞰画像として把握できるので、障害物を避けて安全な採鉱機2の操縦ができる。
また、採鉱機2に高さ調整手段としてウインチ11を設置してソナーヘッド8の高さを調整できるようにしたから、ソナーヘッド8が採鉱機2から離れた高い位置では採鉱機2を含む周辺の海底地形を俯瞰画像として把握できると共に、ソナーヘッド8が採鉱機2に近い比較的低い高さ位置では採鉱機2の掘削刃の走査状況や鉱床の状況等を拡大されたエコー画像として把握することができる。
【0023】
また、ソナーヘッド8で入手した画像は、電気信号に変換して第二のアンビリカントケーブル4Bと第一のアンビリカントケーブル4Aを介して母船3へ送信できるから、従来のように母船3から発振する超音波によって海底Gでの地形や採鉱機2のエコー画像を把握するシステムでないため、1000mを超える深海であっても反射エコーの減衰や伝搬範囲の拡大などによる分解能不足を来すことがなく高い分解能の画像を得られる。
しかも、超音波の発振と反射による受信はソナーヘッド8と採鉱機2や周辺の海底地形との間で行われるため、比較的距離が短く超音波の減衰等の影響を受けずにエコー画像を得られる。また、ソナーヘッド8の高さを低くする場合には、対象物との距離が短くなるためエコー画像の分解能が向上することになる。
このように、本実施形態によれば、堆積物の舞い上がる採鉱機2の走行時や掘削作業等においても、採鉱機2やその近傍の海底地形や掘削状況等を観察できる上に、掘削すべき地山の形状と掘削刃との距離をリアルタイムで把握することができて、効率的な掘削を行える。更に、ソナーヘッド8の俯瞰高度を高く上げることで鉱区全体の地形等を把握できて掘削計画を立てることができるようになる。
【0024】
なお、本発明は上述の実施形態に限定されることなく、本発明の要旨を変更しない範囲で上述した実施形態の構成を適宜変更することができる。
例えば、上述した実施形態では、監視手段としてソナーヘッド8を採用したが、ソナーヘッド8に代えて例えば撮影手段として水中カメラを採用してもよい。この場合、海底は暗いので照明手段を設置することが好ましい。
監視手段として水中カメラを採用した場合、従来、採鉱機2に直接取り付ける構成であるため、採鉱機2の走行や掘削刃による掘削の際に堆積物や掘削粉の塵等が舞い上がり、可視光線による視界が遮られて撮影画像の映りが悪くなる。この場合でも、本発明による重機制御装置1によれば、第二のアンビリカントケーブル4Bを延ばして採鉱機2から離間した高所に水中カメラが配設されるため、堆積物や掘削粉の塵等の舞い上がりのない領域も含めて俯瞰撮影することができるので、採鉱機2を含めた周辺の地形の画像を得られて地形の状況や掘削の状況を把握できる。
【0025】
なお、本発明において、ソナーヘッド8や水中カメラ等の監視手段を採鉱機2から離間して設置する場合、その距離は例えば次のように設置できる。
まず、採鉱機2で海底Gの鉱床GKを掘削する場合には、掘削刃として掘削ドリルを鉱床GKの鉱脈にあわせて操作、制御する必要がある。すなわち、掘削ドリルがどの程度鉱脈に接触しているのか、また掘削痕がどの程度あるのかなどを判定するためには少なくとも10センチ程度の分解能が好ましい。この程度の分解能を得るためのソナーヘッド8や水中カメラとの離隔距離として、装置の特性にもよるが、例えば5mから10m程度離隔距離があればよい。
【0026】
また、採鉱機2が鉱区内を移動するための運転を制御する場合、例えば一つの場所での掘削が終了して次の掘削予定場所へ移動する運転には、採鉱機2の幅と長さが例えば5m程度とすると、キャタピラなどが海底Gの割れ目にはまって動けなくならないように障害物をさけて走行する必要がある。このときソナーヘッド8や水中カメラに必要な分解能は50センチ程度と想定され、この程度の分解能を得るためのソナーヘッド8や水中カメラとの離隔距離として、例えば10mから50m程度離隔距離があればよい。監視手段としてソナーヘッド8や水中カメラ以外のものを用いてもよい。
【0027】
また、上述の実施形態では、鉱床を掘削する重機として採鉱機2を用いたが、掘削機等、他の適宜の重機を採用してもよいことはいうまでもない。
また、高さ調整手段はウインチ11に限定されることなく各種の手段を採用でき、第一のアンビリカントケーブル4A、第二のアンビリカントケーブル4Bについても電気信号を伝送可能であれば各種のケーブルを使用できる。
【符号の説明】
【0028】
1 重機制御装置
2 採鉱機
3 母船
4A 第一のアンビリカントケーブル
4B 第二のアンビリカントケーブル
7 浮体
8 ソナーヘッド
11 ウインチ
【特許請求の範囲】
【請求項1】
水底を移動可能な重機と、該重機からケーブルを介して上方に支持された浮体と、前記ケーブルまたは浮体に設けられていて前記重機または/及びその周辺を監視または探知する監視手段とを備えたことを特徴とする重機制御装置。
【請求項2】
前記ケーブルまたは浮体に取り付けられた監視手段はその高さを調整する高さ調整手段を有している請求項1に記載された重機制御装置。
【請求項3】
前記高さ調整手段はケーブルの巻き取りと巻き出しを行うことで昇降させるウインチである請求項2に記載された重機制御装置。
【請求項1】
水底を移動可能な重機と、該重機からケーブルを介して上方に支持された浮体と、前記ケーブルまたは浮体に設けられていて前記重機または/及びその周辺を監視または探知する監視手段とを備えたことを特徴とする重機制御装置。
【請求項2】
前記ケーブルまたは浮体に取り付けられた監視手段はその高さを調整する高さ調整手段を有している請求項1に記載された重機制御装置。
【請求項3】
前記高さ調整手段はケーブルの巻き取りと巻き出しを行うことで昇降させるウインチである請求項2に記載された重機制御装置。
【図1】


【図2】
【図3】

【図2】
【図3】
【公開番号】特開2012−184932(P2012−184932A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2011−46248(P2011−46248)
【出願日】平成23年3月3日(2011.3.3)
【出願人】(306022513)新日鉄エンジニアリング株式会社 (897)
【Fターム(参考)】
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成23年3月3日(2011.3.3)
【出願人】(306022513)新日鉄エンジニアリング株式会社 (897)
【Fターム(参考)】
[ Back to top ]