
重症心身障害者の自立的移動支援装置
【課題】床にテープやガイドライン等を配置する必要が無く、レイアウト変更に対応可能な、重症心身障害者の自立的移動支援装置を提供する。
【解決手段】重症心身障害者の自立的移動支援装置において、移動空間の天井10や壁面12に配設された、該移動空間や移動装置200の進行方向に関する情報を発信するためのマーカ100と、移動装置200に配設された、前記マーカ100からの信号を受信するための受信手段220、周囲の壁面12や障害物16までの距離と方位を検出するための測位手段240、移動先を重症心身障害者20が指定可能な入力手段280、前記測位手段240の測定結果や前記マーカ100からの信号に基づき移動方向を判断して、前記入力手段280で指定された移動先まで移動装置200を移動するよう制御するための制御手段320、及び、該制御手段320の出力により移動装置200を駆動する駆動手段340と、を備える。
【解決手段】重症心身障害者の自立的移動支援装置において、移動空間の天井10や壁面12に配設された、該移動空間や移動装置200の進行方向に関する情報を発信するためのマーカ100と、移動装置200に配設された、前記マーカ100からの信号を受信するための受信手段220、周囲の壁面12や障害物16までの距離と方位を検出するための測位手段240、移動先を重症心身障害者20が指定可能な入力手段280、前記測位手段240の測定結果や前記マーカ100からの信号に基づき移動方向を判断して、前記入力手段280で指定された移動先まで移動装置200を移動するよう制御するための制御手段320、及び、該制御手段320の出力により移動装置200を駆動する駆動手段340と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、重症心身障害者の自立的移動支援装置に係り、特に、電動車椅子とするのに好適な、床に反射テープやガイドライン等を配設することなく、レイアウト変更に対応可能で、重症心身障害者の意思決定で目的地の場所に移動できる重症心身障害者の自立的移動支援装置に関する。
【背景技術】
【0002】
重度の知的障害及び重度の肢体不自由が重複する重症心身障害者は、自力での移動や言語によるコミュニケーションの困難等から、彼らの要求を支援者に汲み取ってもらうまで「待機状態」に置かれる場合が多い。従って、何か要求したいことがあっても待つしかないという他者依存的生活の中では、彼らの能動的欲求を充足することは難しく、自身の興味・関心に従って移動することができないため、彼らの把握できている生活世界は、支援者が連れて行ってくれる場所及び天井が主とならざるを得ない。これらを要因としたストレス増大は、心のみならず身体を含めた状態の悪化を招来させる。
【0003】
重症心身障害者が簡便に操作でき、自らの意思決定で移動可能な装置を開発することは、重症心身障害者の空間認知能力及び因果関係の認知能力の向上のほか、出会いの機会の増加によるコミュニケーション力の豊かさを派生させるとともに、嫌悪な状況からの離脱が可能となる。このため、こうした開発は重症心身障害者のストレス軽減や自立及び自己有能感・自尊感情の向上に大きく寄与するものと考えられる。
【0004】
一般に障害を有する者の移動手段は、市販されている電動車椅子のジョイステック型のコントロールレバーを前後左右に操作して走行する。しかし、目的地までの経路の認識やレバーの微妙な操作は重症心身障害者にとっては非常に難しく、これらの問題を解決しない限り、重症心身障害者が一般の電動車椅子で自走することは困難である。上記理由から重症心身障害者が日常生活の中で容易に利用でき、操作に特別な訓練を要しない自立的移動支援装置の開発が要求されるようになってきた。
【0005】
このような目的で、発明者は、先に、非特許文献1で、(1)目的の場所の選択は、重症心身障害者でも簡便に操作することができるタッチパネルを用いて移動先の場所を選択可能とし、(2)移動開始は、大型スイッチに手をのせるだけで走行する方式とし、(3)電動車椅子の走路は、床に貼られた反射テープの導線に沿って走行するものとし、(4)目的地の検出は、導線の横に反射テープによるバー型パターンを取付け、このパターンを読取ることにより走行中に目的位置の場所を認識できるようにした電動車椅子システムを提案している。
【0006】
又、本発明に類似する技術として、特許文献1には、スタート地点から目的地までのコースに沿って床に設置された無線タグの配置情報、無線タグから得られる情報、障害物検知センサの検知情報に基づいて、障害物との衝突を回避して所定のコースに沿って目的地点に向かって自動走行する車両(電動車椅子)自動搬送システムが記載されている。
【0007】
又、特許文献2には、車椅子を目的地へ誘導する誘導ラインを床に埋め込んで、自動走行車椅子の誘導路を形成するようにした自動走行用の誘導ライン内蔵ユニット及びこれを組み合わせた床を有する床が記載されている。
【0008】
又、特許文献3には、走行体の走行コースを示すラインを、走行体が検知可能な距離情報とコース認識情報をバーコードによって一連に表示したものとし、この走行ラインを走行体が検知して走行する走行路とこの走行路を含む走行装置が記載されている。
【0009】
又、特許文献4には、車椅子本体の現在位置を検出する位置検出部を設け、建物内の間取り情報及び車椅子の動作情報から算出された車椅子の走行経路に沿って、走行中の経路の状態と障害物の有無を確認しながら車椅子を操舵すると共に、走行中、常に現在位置を確認し、ずれを補正するようにした自走式車椅子が記載されている。
【0010】
又、特許文献5には、部屋天井にマーカーを配置し、その位置及び方向を自走ロボット(掃除機)で読み取ることにより、自走ロボットの位置及び方向を認識して、走行経路を制御するようにした自走ロボットとその制御方法が記載されている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2002−341939号公報
【特許文献2】特開2005−309596号公報
【特許文献3】特開平10−232712号公報
【特許文献4】特開2002−282306号公報
【特許文献5】特開2004−185586号公報
【非特許文献】
【0012】
【非特許文献1】横倉三郎他「重症心身障害者の自立的移動支援用電動車椅子の開発」日本福祉工学会 第14回学術講演会 講演論文集,第41−42頁,平成22年11月27日
【発明の概要】
【発明が解決しようとする課題】
【0013】
しかしながら、非特許文献1で発明者が提案した技術では、床に貼られた反射テープが汚れてしまうと、円滑な走行が困難になるという問題点を有していた。
【0014】
更に、非特許文献1や特許文献1〜3に記載の技術では、床に、反射テープ、無線タグ、誘導ライン等を設置するため、融通が利かず、レイアウト変更に対応して反射テープ等を設置し直す必要があり、頻繁なレイアウト変更には対応困難であるという問題点を有していた。
【0015】
又、特許文献4に記載の技術では、位置検出部の構成が不明であった。
【0016】
又、特許文献5に記載の技術では、部屋天井に多数の固定マーカを設ける必要があるという問題点を有していた。
【0017】
なお、屋内で使用するために全地球測位システムGPSの電波を受信して位置情報を得ることなどは不可能である。
【0018】
本発明は、前記従来の問題点を解消するべくなされたもので、床に反射テープやガイドライン等を配設することなく、レイアウト変更に対応可能で、重症心身障害者の意思決定で目的地の場所に移動できる自立的移動支援装置を提供することを課題とする。
【課題を解決するための手段】
【0019】
本発明は、重症心身障害者の自立的移動支援装置において、移動空間の天井や壁面に配設された、該移動空間や移動装置の進行方向に関する情報を発信するためのマーカと、移動装置に配設された、前記マーカからの信号を受信するための受信手段、周囲の壁面や障害物までの距離と方位を検出するための測位手段、移動先を重症心身障害者が指定可能な入力手段、前記測位手段の測定結果や前記マーカからの信号に基づき移動方向を判断して、前記入力手段で指定された移動先まで移動装置を移動するよう制御するための制御手段、及び、該制御手段の出力により移動装置を駆動する駆動手段と、を備えることにより、前記課題を解決したものである。
【0020】
ここで、前記マーカから発信される移動空間や移動装置の進行方向に関する情報をコード化することができる。
【0021】
又、前記マーカを光マーカとすることができる。
【0022】
又、前記光マーカの点灯周期により移動空間や移動装置の進行方向を識別することができる。
【0023】
又、前記測位手段を、距離センサと、該距離センサを水平方向に360°回転する駆動モータとを含んで構成することができる。
【0024】
又、前記距離センサを回転したときの距離測定値の変化から、移動空間の出入口の方向を検出することができる。
【0025】
又、前記測位手段とは独立して障害物を検出するための障害物検出手段を更に備えることができる。
【0026】
又、障害物を検出した時は、前記制御手段が移動装置の移動を一時中止することができる。
【0027】
又、前記入力手段を、呼気スイッチやパネルスイッチとすることができる。
【0028】
又、前記入力手段による入力値や現在位置を表示するための表示手段を更に備えることができる。
【発明の効果】
【0029】
本発明によれば、使用者が直接移動装置の運転操作を行わず、移動先の場所を呼気スイッチやパネルスイッチ等で指定することにより、指定された場所まで自走型移動装置の自動運転により移動することができる。この自走型移動装置が屋内を移動するためには、移動する空間や移動路の位置情報が必要となるが、本発明によれば、例えば光マーカと2次元距離センサを用いて、移動している空間位置情報や移動路位置情報や移動装置の進行方向に関する情報を得ることができる。従って、床に反射テープやガイドライン等を配設することなく、レイアウト変更に対応可能で、重症心身障害者がその意思で目的地の場所に移動することが可能となる。
【図面の簡単な説明】
【0030】
【図1】本発明の第1実施形態の全体構成を示す斜視図
【図2】第1実施形態で用いられている自走型電動車椅子の構成を示すブロック図
【図3】同じく光マーカの構成を示すブロック図
【図4】同じく光検出器の構成を示すブロック図
【図5】同じく光マーカと光検出器の関係を示すブロック図
【図6】同じく2次元距離検出器の構成を示すブロック図
【図7】同じく回転機構と光センサを示す斜視図
【図8】前記2次元距離検出器における回転角と距離の関係の一例を示す平面図
【図9】同じく変化量を示す線図
【図10】同じくドアが閉まっている時の変化量を示す線図
【図11】同じくドアが開いている時の変化量を示す線図
【図12】本発明の第2実施形態における赤外線距離センサの配置を示す平面図
【発明を実施するための形態】
【0031】
以下図面を参照して、本発明の実施形態を詳細に説明する。
【0032】
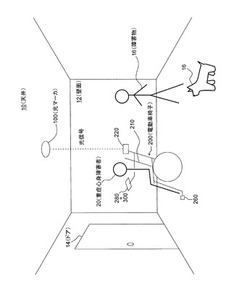
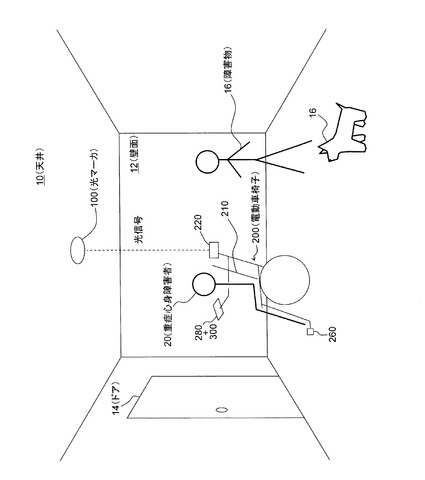
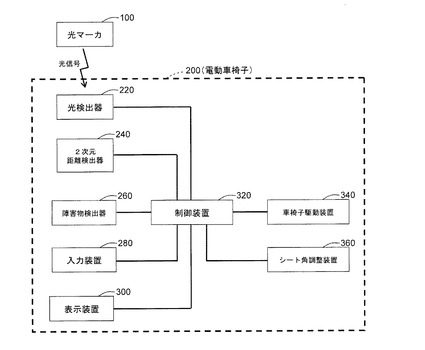
図1は、本発明の第1実施形態の全体構成を示す斜視図、図2は、第1実施形態で用いられている自走型電動車椅子の構成を示すブロック図である。
【0033】
本実施形態は、図1及び図2に示す如く、部屋や廊下等の移動空間の天井10や壁面12に配設された、該移動空間や移動装置の進行方向に関する情報を発信するための光マーカ100と、移動装置である電動車椅子200に配設された、前記光マーカ100からの光信号を受信するための受信手段である光検出器220、周囲の壁面12や障害物(ここでは人やペット)16までの距離と方位を検出するための測位手段である2次元距離検出器240、該2次元距離検出器240とは独立して障害物16を検出するための障害物検出器260、移動先を重症心身障害者20が指定可能な入力装置280、該入力装置280による入力値(移動先等)や進行方向、現在位置を表示するための表示装置300、前記光検出器220、2次元距離検出器240、障害物検出器260等の検出結果に基づき移動方向を判断して、前記入力装置280で指定された移動先まで電動車椅子200を移動するよう制御するための制御装置320、該制御装置320の出力により電動車椅子200の例えば左右の後輪をそれぞれ駆動する車椅子駆動装置340、前記入力装置280で指定された角度まで電動車椅子200のリクライニングシート210の角度を調整するためのシート角調整装置360を備えている。
【0034】
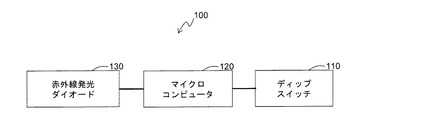
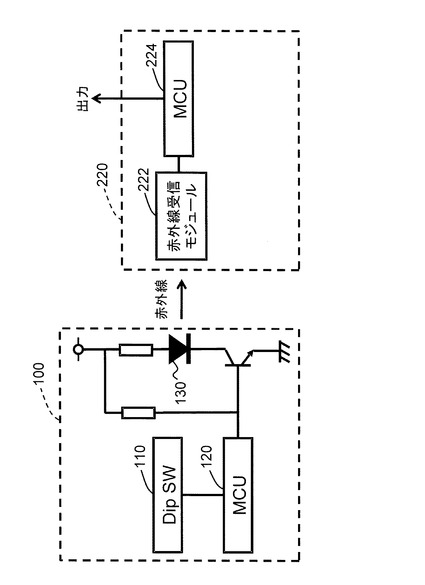
前記光マーカ100は、図3に例示する如く、移動空間の場所(部屋や廊下等)や電動車椅子200の進行方向に関する情報としてコード化された情報を入力するためのディップスイッチ110と、該ディップスイッチ110で指定されたコードに従って赤外線発光ダイオード130を発光させるためのマイクロコンピュータ120と、前記赤外線発光ダイオード130と、例えば太陽電池を用いた電源(図示省略)を備えている。
【0035】
前記光マーカ100は、移動空間の場所に関する情報だけでなく、廊下などの曲がり角の進行方向を指示することができる。例えば、周回走路にあるT字路や十字路でどの方向へ走行するか指示することができる。この指示がない場合は、予め進行方向に関する走路データを制御装置320に入力する必要があるが、マーカからの指示で走行する場合は、予め走路データを制御装置320に入力する必要がなく、自動的に周回コースを走行することが可能となる。
【0036】
前記マイクロコンピュータ120は、ディップスイッチ110で指定されている位置コードを読み込み、そのコードをシリアル信号に変換し、更に変調をかけて赤外線発光ダイオード130から出力する。
【0037】
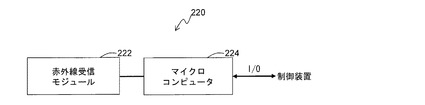
前記光検出器220は、図4及び図5に例示する如く、前記赤外線発光ダイオード130から発光される赤外線を受信する赤外線受信モジュール222と、マイクロコンピュータ(MCU)224で構成され、入出力ポートI/Oが前記制御装置320に接続される。
【0038】
前記赤外線受信モジュール222は、光マーカ100から出力された光信号を復調し、シリアル信号をマイクロコンピュータ224に出力する。該マイクロコンピュータ224は、入力されたシリアル信号を位置情報コードとして制御装置320に送る。
【0039】
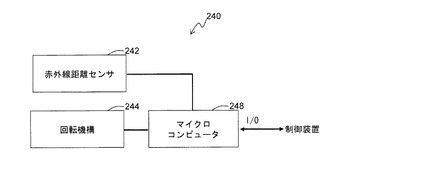
前記2次元距離検出器240は、図6に示す如く、赤外線距離センサ242と、該赤外線距離センサ242を水平方向に360度回転するための回転機構244と、マイクロコンピュータ248で構成され、入出力ポートI/Oが前記制御装置320に接続される。
【0040】
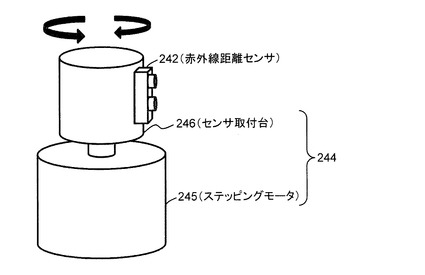
前記赤外線距離センサ242は、図7に示す如く、ステッピングモータ245とセンサ取付台246で構成された回転機構244に機械的に取付けられている。
【0041】
前記マイクロコンピュータ248は、ステッピングモータ245を回転し、電動車椅子200の進行方向との角度調整を行ない、赤外線距離センサ242と反射面(壁等)との距離を測定する。更に、マイクロコンピュータ248は回転機構244を次々と回転し、センサ周囲の反射面の距離を測定することにより、360度の空間距離情報を求め、入出力ポートI/Oを介し制御装置320に送る。制御装置320は、この空間距離情報から進行方向を求める。
【0042】
前記障害物検出器260は、例えば電動車椅子200と障害物16の接触や接近を検出する衝突センサや振動センサ、加速度センサ、超音波センサ等とすることができる。
【0043】
前記入力装置280は、例えば操作者(重症心身障害者)20が呼気を吸うことによりコマンドの選択を行い、吐くことにより、そのコマンドが制御装置320に送られる呼気スイッチや、パネルスイッチ等で構成され、移動先の位置指定が行われる。
【0044】
この自走型電動車椅子200は、光マーカ100からの位置情報や移動装置の進行方向に関する情報と、2次元距離検出器240からの空間と進行方向の情報とから自ら移動経路を自動走行する。
【0045】
具体的には、入力装置280からリクライニングシート210の角度調整のコマンドが入力されると、制御装置320は、シート角調整装置360のアクチュエータを動作して、指定された角度にリクライニングシート210を動かす。
【0046】
又、入力装置280から入力された移動先の位置指定の信号は、制御装置320に送られ、移動先を表示装置300に出力し、入力装置280から移動開始信号が入力されることにより、車椅子駆動装置340を制御して移動を開始する。
【0047】
移動を開始した電動車椅子200は、光マーカ100から発せられた位置情報や移動装置の進行方向に関する情報と2次元距離検出器240から得られる周囲の2次元距離情報から、現在の空間とその位置を認識し、進行方向を判断して、指定された位置に到達する。
【0048】
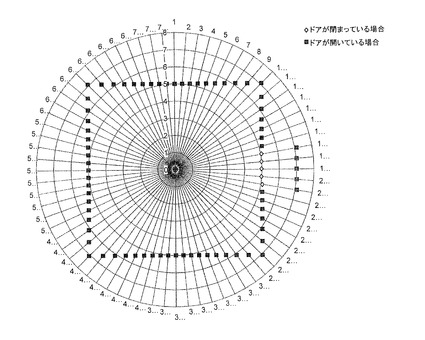
例えば、電動車椅子200が、図8に例示する如く、1辺が10mの部屋の中心にいて右側にドア14(図1参照)があり、その先に2m幅の廊下があり回転角を5度ステップで計測したとする。
【0049】
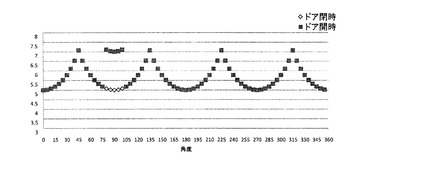
この条件でドアが閉まっている時とドアが開いている時の距離情報を円グラフで示すと図8のように求められ、回転角と距離の関係は、図9のような変化が得られる。図9からわかるように、角度に対する距離の変化は、ドアが開かれている場合は、ドア部の端までの変化角度に対する距離が急激に増加し、その後急激に減少する部分が現れるので、この角度方向が部屋の出入り口と判断することができる。
【0050】
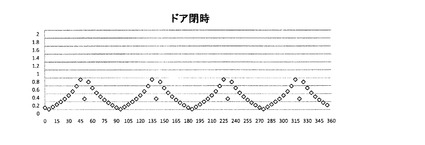
又、この変化量を求める方法として、角度が0度と5度の平均距離データと10度の距離データの差の絶対値を変化量とし求める。次に5度と15度の平均距離データと15度の距離データの差の絶対値を求める。この計算を360度まで求め、さらに350度と355度の平均距離データと、0度の距離データの差の絶対値を求める。最後に355度と0度の平均距離データと5度の距離データの差の絶対値を求める。
【0051】
Yn=|xn−(xn−2+xn−1)/2|
【0052】
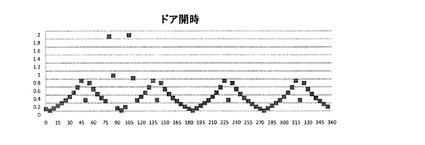
この方式で求めた時の変化量Ynは図10(ドアが閉まっている時)、図11(ドアが開いている時)に示すとおりとなる。
【0053】
この変化量データYnから、一定の閾値を越えるピーク2点を検出することで、出入口方向を認識することができる。更に、壁より近くに障害物16がある場合も同じような変化する現象が起こるが、障害物16までの距離と対角の距離、および、光マーカ100から得られている部屋情報からの距離を比較することで、障害物16と認識することが可能である。
【0054】
光マーカ100から得られた部屋の情報とこの変化量から、電動車椅子200の制御装置320は、出入口を判断することができる。また平均値の数を増やすことにより、壁の枠などの細かな凹凸情報を軽減できる。また、この計算は、単純な計算のためにマイクロコンピュータで簡単に実現できるのが特徴である。
【0055】
移動中の電動車椅子200が、障害物検出器260で障害物16を検出した時(人やペットなどが近づいた時)は自動停止する。又、障害物16が移動した時には、再度移動を開始する。
【0056】
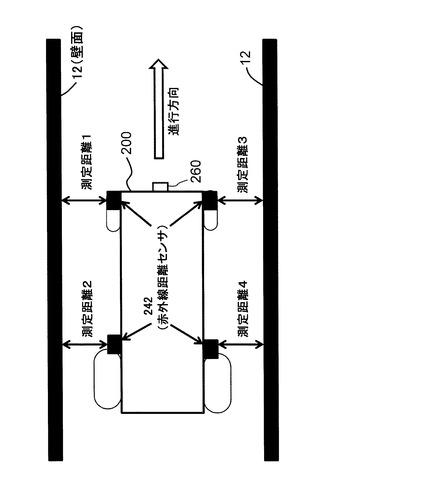
本実施形態においては、測位手段として、赤外線距離センサ242を水平方向に360度回転するものを用いているので、全周方向の距離を洩れなく検出することができる。尚、測位手段の種類は、これに限定されず、図12に示す第2実施形態の如く、例えば4チャンネルの赤外線距離センサ242を電動車椅子200の側面前後の4箇所に配設して、対向する壁面12からの距離を測定するものとすることも可能である。又、赤外線距離センサの代わりに超音波距離センサを用いることもできる。
【0057】
本実施形態においては、更に、測位手段とは独立した障害物検出器262を設けているので、障害物16を確実に検出することができる。尚、測位手段とは独立した障害物検出手段を省略することも可能である。
【0058】
本実施形態においては、マーカから電動車椅子200の進行方向に関する情報も発信するようにしているので、予め走路データを制御装置320に入力する必要がなく、制御が容易である。なお、予め走路データを制御装置320に入力するようにして、マーカが移動空間に関する情報のみを発信するようにしても良い。
【0059】
又、マーカも光マーカ100に限定されず、例えば超音波発信機などを用いることも可能である。
【0060】
マーカの配設位置は、天井10の中央付近が好ましいが、これに限定されず、例えば壁面12の天井近くであっても良い。
【0061】
更に、シート角調整装置360も省略可能である。
【0062】
又、前記実施形態においては、いずれも、移動装置が電動車椅子とされていたが、移動装置の種類も電動車椅子に限定されない。
【符号の説明】
【0063】
10…天井
12…壁面
14…ドア
16…障害物
20…重症心身障害者
100…光マーカ
200…電動車椅子
220…光検出器
240…2次元距離検出器
260…障害物検出器
280…入力装置
300…表示装置
320…制御装置
340…車椅子駆動装置
【技術分野】
【0001】
本発明は、重症心身障害者の自立的移動支援装置に係り、特に、電動車椅子とするのに好適な、床に反射テープやガイドライン等を配設することなく、レイアウト変更に対応可能で、重症心身障害者の意思決定で目的地の場所に移動できる重症心身障害者の自立的移動支援装置に関する。
【背景技術】
【0002】
重度の知的障害及び重度の肢体不自由が重複する重症心身障害者は、自力での移動や言語によるコミュニケーションの困難等から、彼らの要求を支援者に汲み取ってもらうまで「待機状態」に置かれる場合が多い。従って、何か要求したいことがあっても待つしかないという他者依存的生活の中では、彼らの能動的欲求を充足することは難しく、自身の興味・関心に従って移動することができないため、彼らの把握できている生活世界は、支援者が連れて行ってくれる場所及び天井が主とならざるを得ない。これらを要因としたストレス増大は、心のみならず身体を含めた状態の悪化を招来させる。
【0003】
重症心身障害者が簡便に操作でき、自らの意思決定で移動可能な装置を開発することは、重症心身障害者の空間認知能力及び因果関係の認知能力の向上のほか、出会いの機会の増加によるコミュニケーション力の豊かさを派生させるとともに、嫌悪な状況からの離脱が可能となる。このため、こうした開発は重症心身障害者のストレス軽減や自立及び自己有能感・自尊感情の向上に大きく寄与するものと考えられる。
【0004】
一般に障害を有する者の移動手段は、市販されている電動車椅子のジョイステック型のコントロールレバーを前後左右に操作して走行する。しかし、目的地までの経路の認識やレバーの微妙な操作は重症心身障害者にとっては非常に難しく、これらの問題を解決しない限り、重症心身障害者が一般の電動車椅子で自走することは困難である。上記理由から重症心身障害者が日常生活の中で容易に利用でき、操作に特別な訓練を要しない自立的移動支援装置の開発が要求されるようになってきた。
【0005】
このような目的で、発明者は、先に、非特許文献1で、(1)目的の場所の選択は、重症心身障害者でも簡便に操作することができるタッチパネルを用いて移動先の場所を選択可能とし、(2)移動開始は、大型スイッチに手をのせるだけで走行する方式とし、(3)電動車椅子の走路は、床に貼られた反射テープの導線に沿って走行するものとし、(4)目的地の検出は、導線の横に反射テープによるバー型パターンを取付け、このパターンを読取ることにより走行中に目的位置の場所を認識できるようにした電動車椅子システムを提案している。
【0006】
又、本発明に類似する技術として、特許文献1には、スタート地点から目的地までのコースに沿って床に設置された無線タグの配置情報、無線タグから得られる情報、障害物検知センサの検知情報に基づいて、障害物との衝突を回避して所定のコースに沿って目的地点に向かって自動走行する車両(電動車椅子)自動搬送システムが記載されている。
【0007】
又、特許文献2には、車椅子を目的地へ誘導する誘導ラインを床に埋め込んで、自動走行車椅子の誘導路を形成するようにした自動走行用の誘導ライン内蔵ユニット及びこれを組み合わせた床を有する床が記載されている。
【0008】
又、特許文献3には、走行体の走行コースを示すラインを、走行体が検知可能な距離情報とコース認識情報をバーコードによって一連に表示したものとし、この走行ラインを走行体が検知して走行する走行路とこの走行路を含む走行装置が記載されている。
【0009】
又、特許文献4には、車椅子本体の現在位置を検出する位置検出部を設け、建物内の間取り情報及び車椅子の動作情報から算出された車椅子の走行経路に沿って、走行中の経路の状態と障害物の有無を確認しながら車椅子を操舵すると共に、走行中、常に現在位置を確認し、ずれを補正するようにした自走式車椅子が記載されている。
【0010】
又、特許文献5には、部屋天井にマーカーを配置し、その位置及び方向を自走ロボット(掃除機)で読み取ることにより、自走ロボットの位置及び方向を認識して、走行経路を制御するようにした自走ロボットとその制御方法が記載されている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2002−341939号公報
【特許文献2】特開2005−309596号公報
【特許文献3】特開平10−232712号公報
【特許文献4】特開2002−282306号公報
【特許文献5】特開2004−185586号公報
【非特許文献】
【0012】
【非特許文献1】横倉三郎他「重症心身障害者の自立的移動支援用電動車椅子の開発」日本福祉工学会 第14回学術講演会 講演論文集,第41−42頁,平成22年11月27日
【発明の概要】
【発明が解決しようとする課題】
【0013】
しかしながら、非特許文献1で発明者が提案した技術では、床に貼られた反射テープが汚れてしまうと、円滑な走行が困難になるという問題点を有していた。
【0014】
更に、非特許文献1や特許文献1〜3に記載の技術では、床に、反射テープ、無線タグ、誘導ライン等を設置するため、融通が利かず、レイアウト変更に対応して反射テープ等を設置し直す必要があり、頻繁なレイアウト変更には対応困難であるという問題点を有していた。
【0015】
又、特許文献4に記載の技術では、位置検出部の構成が不明であった。
【0016】
又、特許文献5に記載の技術では、部屋天井に多数の固定マーカを設ける必要があるという問題点を有していた。
【0017】
なお、屋内で使用するために全地球測位システムGPSの電波を受信して位置情報を得ることなどは不可能である。
【0018】
本発明は、前記従来の問題点を解消するべくなされたもので、床に反射テープやガイドライン等を配設することなく、レイアウト変更に対応可能で、重症心身障害者の意思決定で目的地の場所に移動できる自立的移動支援装置を提供することを課題とする。
【課題を解決するための手段】
【0019】
本発明は、重症心身障害者の自立的移動支援装置において、移動空間の天井や壁面に配設された、該移動空間や移動装置の進行方向に関する情報を発信するためのマーカと、移動装置に配設された、前記マーカからの信号を受信するための受信手段、周囲の壁面や障害物までの距離と方位を検出するための測位手段、移動先を重症心身障害者が指定可能な入力手段、前記測位手段の測定結果や前記マーカからの信号に基づき移動方向を判断して、前記入力手段で指定された移動先まで移動装置を移動するよう制御するための制御手段、及び、該制御手段の出力により移動装置を駆動する駆動手段と、を備えることにより、前記課題を解決したものである。
【0020】
ここで、前記マーカから発信される移動空間や移動装置の進行方向に関する情報をコード化することができる。
【0021】
又、前記マーカを光マーカとすることができる。
【0022】
又、前記光マーカの点灯周期により移動空間や移動装置の進行方向を識別することができる。
【0023】
又、前記測位手段を、距離センサと、該距離センサを水平方向に360°回転する駆動モータとを含んで構成することができる。
【0024】
又、前記距離センサを回転したときの距離測定値の変化から、移動空間の出入口の方向を検出することができる。
【0025】
又、前記測位手段とは独立して障害物を検出するための障害物検出手段を更に備えることができる。
【0026】
又、障害物を検出した時は、前記制御手段が移動装置の移動を一時中止することができる。
【0027】
又、前記入力手段を、呼気スイッチやパネルスイッチとすることができる。
【0028】
又、前記入力手段による入力値や現在位置を表示するための表示手段を更に備えることができる。
【発明の効果】
【0029】
本発明によれば、使用者が直接移動装置の運転操作を行わず、移動先の場所を呼気スイッチやパネルスイッチ等で指定することにより、指定された場所まで自走型移動装置の自動運転により移動することができる。この自走型移動装置が屋内を移動するためには、移動する空間や移動路の位置情報が必要となるが、本発明によれば、例えば光マーカと2次元距離センサを用いて、移動している空間位置情報や移動路位置情報や移動装置の進行方向に関する情報を得ることができる。従って、床に反射テープやガイドライン等を配設することなく、レイアウト変更に対応可能で、重症心身障害者がその意思で目的地の場所に移動することが可能となる。
【図面の簡単な説明】
【0030】
【図1】本発明の第1実施形態の全体構成を示す斜視図
【図2】第1実施形態で用いられている自走型電動車椅子の構成を示すブロック図
【図3】同じく光マーカの構成を示すブロック図
【図4】同じく光検出器の構成を示すブロック図
【図5】同じく光マーカと光検出器の関係を示すブロック図
【図6】同じく2次元距離検出器の構成を示すブロック図
【図7】同じく回転機構と光センサを示す斜視図
【図8】前記2次元距離検出器における回転角と距離の関係の一例を示す平面図
【図9】同じく変化量を示す線図
【図10】同じくドアが閉まっている時の変化量を示す線図
【図11】同じくドアが開いている時の変化量を示す線図
【図12】本発明の第2実施形態における赤外線距離センサの配置を示す平面図
【発明を実施するための形態】
【0031】
以下図面を参照して、本発明の実施形態を詳細に説明する。
【0032】
図1は、本発明の第1実施形態の全体構成を示す斜視図、図2は、第1実施形態で用いられている自走型電動車椅子の構成を示すブロック図である。
【0033】
本実施形態は、図1及び図2に示す如く、部屋や廊下等の移動空間の天井10や壁面12に配設された、該移動空間や移動装置の進行方向に関する情報を発信するための光マーカ100と、移動装置である電動車椅子200に配設された、前記光マーカ100からの光信号を受信するための受信手段である光検出器220、周囲の壁面12や障害物(ここでは人やペット)16までの距離と方位を検出するための測位手段である2次元距離検出器240、該2次元距離検出器240とは独立して障害物16を検出するための障害物検出器260、移動先を重症心身障害者20が指定可能な入力装置280、該入力装置280による入力値(移動先等)や進行方向、現在位置を表示するための表示装置300、前記光検出器220、2次元距離検出器240、障害物検出器260等の検出結果に基づき移動方向を判断して、前記入力装置280で指定された移動先まで電動車椅子200を移動するよう制御するための制御装置320、該制御装置320の出力により電動車椅子200の例えば左右の後輪をそれぞれ駆動する車椅子駆動装置340、前記入力装置280で指定された角度まで電動車椅子200のリクライニングシート210の角度を調整するためのシート角調整装置360を備えている。
【0034】
前記光マーカ100は、図3に例示する如く、移動空間の場所(部屋や廊下等)や電動車椅子200の進行方向に関する情報としてコード化された情報を入力するためのディップスイッチ110と、該ディップスイッチ110で指定されたコードに従って赤外線発光ダイオード130を発光させるためのマイクロコンピュータ120と、前記赤外線発光ダイオード130と、例えば太陽電池を用いた電源(図示省略)を備えている。
【0035】
前記光マーカ100は、移動空間の場所に関する情報だけでなく、廊下などの曲がり角の進行方向を指示することができる。例えば、周回走路にあるT字路や十字路でどの方向へ走行するか指示することができる。この指示がない場合は、予め進行方向に関する走路データを制御装置320に入力する必要があるが、マーカからの指示で走行する場合は、予め走路データを制御装置320に入力する必要がなく、自動的に周回コースを走行することが可能となる。
【0036】
前記マイクロコンピュータ120は、ディップスイッチ110で指定されている位置コードを読み込み、そのコードをシリアル信号に変換し、更に変調をかけて赤外線発光ダイオード130から出力する。
【0037】
前記光検出器220は、図4及び図5に例示する如く、前記赤外線発光ダイオード130から発光される赤外線を受信する赤外線受信モジュール222と、マイクロコンピュータ(MCU)224で構成され、入出力ポートI/Oが前記制御装置320に接続される。
【0038】
前記赤外線受信モジュール222は、光マーカ100から出力された光信号を復調し、シリアル信号をマイクロコンピュータ224に出力する。該マイクロコンピュータ224は、入力されたシリアル信号を位置情報コードとして制御装置320に送る。
【0039】
前記2次元距離検出器240は、図6に示す如く、赤外線距離センサ242と、該赤外線距離センサ242を水平方向に360度回転するための回転機構244と、マイクロコンピュータ248で構成され、入出力ポートI/Oが前記制御装置320に接続される。
【0040】
前記赤外線距離センサ242は、図7に示す如く、ステッピングモータ245とセンサ取付台246で構成された回転機構244に機械的に取付けられている。
【0041】
前記マイクロコンピュータ248は、ステッピングモータ245を回転し、電動車椅子200の進行方向との角度調整を行ない、赤外線距離センサ242と反射面(壁等)との距離を測定する。更に、マイクロコンピュータ248は回転機構244を次々と回転し、センサ周囲の反射面の距離を測定することにより、360度の空間距離情報を求め、入出力ポートI/Oを介し制御装置320に送る。制御装置320は、この空間距離情報から進行方向を求める。
【0042】
前記障害物検出器260は、例えば電動車椅子200と障害物16の接触や接近を検出する衝突センサや振動センサ、加速度センサ、超音波センサ等とすることができる。
【0043】
前記入力装置280は、例えば操作者(重症心身障害者)20が呼気を吸うことによりコマンドの選択を行い、吐くことにより、そのコマンドが制御装置320に送られる呼気スイッチや、パネルスイッチ等で構成され、移動先の位置指定が行われる。
【0044】
この自走型電動車椅子200は、光マーカ100からの位置情報や移動装置の進行方向に関する情報と、2次元距離検出器240からの空間と進行方向の情報とから自ら移動経路を自動走行する。
【0045】
具体的には、入力装置280からリクライニングシート210の角度調整のコマンドが入力されると、制御装置320は、シート角調整装置360のアクチュエータを動作して、指定された角度にリクライニングシート210を動かす。
【0046】
又、入力装置280から入力された移動先の位置指定の信号は、制御装置320に送られ、移動先を表示装置300に出力し、入力装置280から移動開始信号が入力されることにより、車椅子駆動装置340を制御して移動を開始する。
【0047】
移動を開始した電動車椅子200は、光マーカ100から発せられた位置情報や移動装置の進行方向に関する情報と2次元距離検出器240から得られる周囲の2次元距離情報から、現在の空間とその位置を認識し、進行方向を判断して、指定された位置に到達する。
【0048】
例えば、電動車椅子200が、図8に例示する如く、1辺が10mの部屋の中心にいて右側にドア14(図1参照)があり、その先に2m幅の廊下があり回転角を5度ステップで計測したとする。
【0049】
この条件でドアが閉まっている時とドアが開いている時の距離情報を円グラフで示すと図8のように求められ、回転角と距離の関係は、図9のような変化が得られる。図9からわかるように、角度に対する距離の変化は、ドアが開かれている場合は、ドア部の端までの変化角度に対する距離が急激に増加し、その後急激に減少する部分が現れるので、この角度方向が部屋の出入り口と判断することができる。
【0050】
又、この変化量を求める方法として、角度が0度と5度の平均距離データと10度の距離データの差の絶対値を変化量とし求める。次に5度と15度の平均距離データと15度の距離データの差の絶対値を求める。この計算を360度まで求め、さらに350度と355度の平均距離データと、0度の距離データの差の絶対値を求める。最後に355度と0度の平均距離データと5度の距離データの差の絶対値を求める。
【0051】
Yn=|xn−(xn−2+xn−1)/2|
【0052】
この方式で求めた時の変化量Ynは図10(ドアが閉まっている時)、図11(ドアが開いている時)に示すとおりとなる。
【0053】
この変化量データYnから、一定の閾値を越えるピーク2点を検出することで、出入口方向を認識することができる。更に、壁より近くに障害物16がある場合も同じような変化する現象が起こるが、障害物16までの距離と対角の距離、および、光マーカ100から得られている部屋情報からの距離を比較することで、障害物16と認識することが可能である。
【0054】
光マーカ100から得られた部屋の情報とこの変化量から、電動車椅子200の制御装置320は、出入口を判断することができる。また平均値の数を増やすことにより、壁の枠などの細かな凹凸情報を軽減できる。また、この計算は、単純な計算のためにマイクロコンピュータで簡単に実現できるのが特徴である。
【0055】
移動中の電動車椅子200が、障害物検出器260で障害物16を検出した時(人やペットなどが近づいた時)は自動停止する。又、障害物16が移動した時には、再度移動を開始する。
【0056】
本実施形態においては、測位手段として、赤外線距離センサ242を水平方向に360度回転するものを用いているので、全周方向の距離を洩れなく検出することができる。尚、測位手段の種類は、これに限定されず、図12に示す第2実施形態の如く、例えば4チャンネルの赤外線距離センサ242を電動車椅子200の側面前後の4箇所に配設して、対向する壁面12からの距離を測定するものとすることも可能である。又、赤外線距離センサの代わりに超音波距離センサを用いることもできる。
【0057】
本実施形態においては、更に、測位手段とは独立した障害物検出器262を設けているので、障害物16を確実に検出することができる。尚、測位手段とは独立した障害物検出手段を省略することも可能である。
【0058】
本実施形態においては、マーカから電動車椅子200の進行方向に関する情報も発信するようにしているので、予め走路データを制御装置320に入力する必要がなく、制御が容易である。なお、予め走路データを制御装置320に入力するようにして、マーカが移動空間に関する情報のみを発信するようにしても良い。
【0059】
又、マーカも光マーカ100に限定されず、例えば超音波発信機などを用いることも可能である。
【0060】
マーカの配設位置は、天井10の中央付近が好ましいが、これに限定されず、例えば壁面12の天井近くであっても良い。
【0061】
更に、シート角調整装置360も省略可能である。
【0062】
又、前記実施形態においては、いずれも、移動装置が電動車椅子とされていたが、移動装置の種類も電動車椅子に限定されない。
【符号の説明】
【0063】
10…天井
12…壁面
14…ドア
16…障害物
20…重症心身障害者
100…光マーカ
200…電動車椅子
220…光検出器
240…2次元距離検出器
260…障害物検出器
280…入力装置
300…表示装置
320…制御装置
340…車椅子駆動装置
【特許請求の範囲】
【請求項1】
移動空間の天井や壁面に配設された、該移動空間や移動装置の進行方向に関する情報を発信するためのマーカと、
移動装置に配設された、前記マーカからの信号を受信するための受信手段、周囲の壁面や障害物までの距離と方位を検出するための測位手段、移動先を重症心身障害者が指定可能な入力手段、前記測位手段の測定結果や前記マーカからの信号に基づき移動方向を判断して、前記入力手段で指定された移動先まで移動装置を移動するよう制御するための制御手段、及び、該制御手段の出力により移動装置を駆動する駆動手段と、
を備えたことを特徴とする重症心身障害者の自立的移動支援装置。
【請求項2】
前記マーカから発信される移動空間や移動装置の進行方向に関する情報がコード化されていることを特徴とする請求項1に記載の重症心身障害者の自立的移動支援装置。
【請求項3】
前記マーカが光マーカであることを特徴とする請求項1に記載の重症心身障害者の自立的移動支援装置。
【請求項4】
前記光マーカの点灯周期により移動空間や移動装置の進行方向を識別するようにされていることを特徴とする請求項3に記載の重症心身障害者の自立的移動支援装置。
【請求項5】
前記測位手段が、距離センサと、該距離センサを水平方向に360°回転する駆動モータとを含んで構成されていることを特徴とする請求項1乃至4のいずれかに記載の重症心身障害者の自立的移動支援装置。
【請求項6】
前記距離センサを回転したときの距離測定値の変化から、移動空間の出入口の方向を検出することを特徴とする請求項5に記載の重症心身障害者の自立的移動支援装置。
【請求項7】
前記測位手段とは独立して障害物を検出するための障害物検出手段を更に備えたことを特徴とする請求項1乃至6のいずれかに記載の重症心身障害者の自立的移動支援装置。
【請求項8】
障害物を検出した時は、前記制御手段が移動装置の移動を一時中止するようにされていることを特徴とする請求項1乃至7のいずれかに記載の重症心身障害者の自立的移動支援装置。
【請求項9】
前記入力手段が、呼気スイッチやパネルスイッチであることを特徴とする請求項1乃至8のいずれかに記載の重症心身障害者の自立的移動支援装置。
【請求項10】
前記入力手段による入力値や現在位置を表示するための表示手段を更に備えたことを特徴とする請求項1乃至9のいずれかに記載の重症心身障害者の自立的移動支援装置。
【請求項1】
移動空間の天井や壁面に配設された、該移動空間や移動装置の進行方向に関する情報を発信するためのマーカと、
移動装置に配設された、前記マーカからの信号を受信するための受信手段、周囲の壁面や障害物までの距離と方位を検出するための測位手段、移動先を重症心身障害者が指定可能な入力手段、前記測位手段の測定結果や前記マーカからの信号に基づき移動方向を判断して、前記入力手段で指定された移動先まで移動装置を移動するよう制御するための制御手段、及び、該制御手段の出力により移動装置を駆動する駆動手段と、
を備えたことを特徴とする重症心身障害者の自立的移動支援装置。
【請求項2】
前記マーカから発信される移動空間や移動装置の進行方向に関する情報がコード化されていることを特徴とする請求項1に記載の重症心身障害者の自立的移動支援装置。
【請求項3】
前記マーカが光マーカであることを特徴とする請求項1に記載の重症心身障害者の自立的移動支援装置。
【請求項4】
前記光マーカの点灯周期により移動空間や移動装置の進行方向を識別するようにされていることを特徴とする請求項3に記載の重症心身障害者の自立的移動支援装置。
【請求項5】
前記測位手段が、距離センサと、該距離センサを水平方向に360°回転する駆動モータとを含んで構成されていることを特徴とする請求項1乃至4のいずれかに記載の重症心身障害者の自立的移動支援装置。
【請求項6】
前記距離センサを回転したときの距離測定値の変化から、移動空間の出入口の方向を検出することを特徴とする請求項5に記載の重症心身障害者の自立的移動支援装置。
【請求項7】
前記測位手段とは独立して障害物を検出するための障害物検出手段を更に備えたことを特徴とする請求項1乃至6のいずれかに記載の重症心身障害者の自立的移動支援装置。
【請求項8】
障害物を検出した時は、前記制御手段が移動装置の移動を一時中止するようにされていることを特徴とする請求項1乃至7のいずれかに記載の重症心身障害者の自立的移動支援装置。
【請求項9】
前記入力手段が、呼気スイッチやパネルスイッチであることを特徴とする請求項1乃至8のいずれかに記載の重症心身障害者の自立的移動支援装置。
【請求項10】
前記入力手段による入力値や現在位置を表示するための表示手段を更に備えたことを特徴とする請求項1乃至9のいずれかに記載の重症心身障害者の自立的移動支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−97767(P2013−97767A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−243272(P2011−243272)
【出願日】平成23年11月7日(2011.11.7)
【出願人】(500132214)学校法人明星学苑 (23)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月7日(2011.11.7)
【出願人】(500132214)学校法人明星学苑 (23)
【Fターム(参考)】
[ Back to top ]