
重量検知装置およびこれを備えた紙葉類処理装置
【課題】高速で搬送される紙葉類の重量を連続的に精度良く検知することができる重量検知装置、この重量検知装置を備えた紙葉類処理装置を提供する。
【解決手段】実施形態によれば、重量検知装置10は、回転体34a、34bに挟まれた状態で上流側から搬送されて来る紙葉類を受取って紙葉類の重量を検知する重量検知装置であって、紙葉類を搬送する搬送路に独立して設けられた支持体12と、前記支持体上に設けられ、紙葉類を回転体で挟んで搬送する搬送機構14と、紙葉類を搬送中の前記搬送機構および支持体の重量を検知する重量センサ16と、少なくとも前記支持体よりも上流側の上流側搬送機構における紙葉類の搬送速度を検出する検出器50と、前記検出器により得られた速度情報を基に、前記搬送機構による紙葉類の搬送速度が、検出された搬送速度と一致するように、前記搬送機構の搬送速度を制御する制御装置52と、を備えている。
【解決手段】実施形態によれば、重量検知装置10は、回転体34a、34bに挟まれた状態で上流側から搬送されて来る紙葉類を受取って紙葉類の重量を検知する重量検知装置であって、紙葉類を搬送する搬送路に独立して設けられた支持体12と、前記支持体上に設けられ、紙葉類を回転体で挟んで搬送する搬送機構14と、紙葉類を搬送中の前記搬送機構および支持体の重量を検知する重量センサ16と、少なくとも前記支持体よりも上流側の上流側搬送機構における紙葉類の搬送速度を検出する検出器50と、前記検出器により得られた速度情報を基に、前記搬送機構による紙葉類の搬送速度が、検出された搬送速度と一致するように、前記搬送機構の搬送速度を制御する制御装置52と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明の実施形態は、郵便物などの紙葉類の重量を測定する重量検知装置、およびこの重量検知装置を備えた紙葉類処理装置に関する。
【背景技術】
【0002】
紙葉類集積装置として、例えば、郵便物処理機では、搬送中の郵便物の重量を量って、当該郵便物に貼ってある切手などの料額印が適正な金額であるか否かを判断する。搬送中の郵便物の重量を測定する装置として、例えば、搬送路の途中にある搬送系を郵便物が通過しているときの郵便物を含む搬送系全体の重量をセンサで測定する重量検知装置が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−039055号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような重量検知装置において、少なくとも上流側から搬送されてくる郵便物の搬送速度と、重量検知装置を構成する搬送系における郵便物の搬送速度が一致していない場合、重量検知装置の搬送系が郵便物を引張り、あるいは、郵便物の突入力を受けることになる。この結果、重量を検出するセンサに重量以外の外力による影響が加わり、センサ内部部材の不要な歪を発生させる。また、この外乱的な外力により重量検知装置に不要な振動を発生させる。そのため、重量によるセンサ内部部材の歪にこの外乱による歪が重畳され、重量の検出精度が低下する。
【0005】
この発明の課題は、高速で搬送される紙葉類の重量を連続的に精度良く検知することができる重量検知装置、この重量検知装置を備えた紙葉類処理装置を提供することにある。
【課題を解決するための手段】
【0006】
実施形態によれば、重量検知装置は、回転体に挟まれた状態で上流側から搬送されて来る紙葉類を受取って紙葉類の重量を検知する重量検知装置であって、紙葉類を搬送する搬送路に独立して設けられた支持体と、前記支持体上に設けられ、紙葉類を回転体で挟んで搬送する搬送機構と、紙葉類を搬送中の前記搬送機構および支持体の重量を検知する重量センサと、少なくとも前記支持体よりも上流の上流側搬送機構における紙葉類の搬送速度を検出する検出器と、前記検出器により得られた速度情報を基に、前記搬送機構による紙葉類の搬送速度が、検出された搬送速度と一致するように、前記搬送機構の搬送速度を制御する制御装置と、を備えている。
【図面の簡単な説明】
【0007】
【図1】図1は、第1の実施形態に係る重量検知装置を備える押印装置を概略的に示すブロック図。
【図2】図2は、前記重量検知装置を示す平面図。
【図3】図3は、前記重量検知装置の正面図。
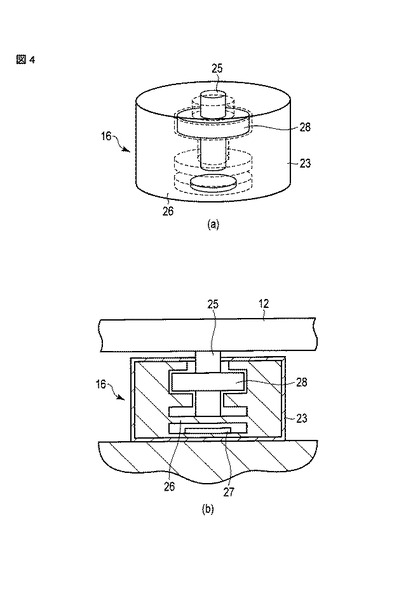
【図4】図4は、前記重量検知装置の重量センサを示す斜視図および断面図。
【図5】図5は、前記重量検知装置の搬送速度制御動作を示すフローチャート。
【図6】図6は、第2の実施形態に係る重量検知装置を示す側面図。
【図7】図7は、第3の実施形態に係る重量検知装置を示す平面図。
【図8】図7は、前記第3の実施形態に係る重量検知装置の側面図。
【図9】図9は、前記第3の実施形態に係る重量検知装置の搬送速度制御動作を示すフローチャート。
【発明を実施するための形態】
【0008】
以下、図面を参照しながら実施形態について、詳細に説明する。
(第1の実施形態)
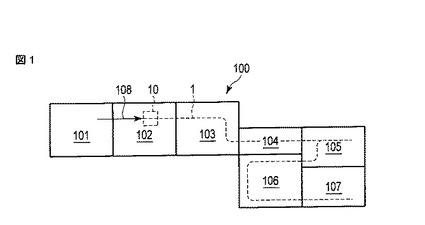
図1は、第1の実施形態に係る重量検知装置を備えた紙葉類処理装置の一例として、郵便物選別取り揃え押印装置100(以下、単に押印装置100と称する)を概略的に示すブロック図である。
【0009】
図1に示すように、押印装置100は、紙葉類としての郵便物Mの搬送方向に沿って、供給部101、機械検知部102、OCRスキャナ部103、ひねり反転部104、スイッチバック部105、押印部106、および区分集積部107を備えている。押印装置100は、上述した各部を通る搬送路1に沿って郵便物Mを搬送する搬送機構108を有する。さらに、押印装置100は、装置に対して種々の操作を指示するとともに、動作モードの切り換え入力や異常表示等をする図示しない操作パネルを有する。
【0010】
供給部101は、例えば、厚さ、搬送方向に沿った長さ、搬送方向と直交する方向に沿った幅、および重量が一定範囲内にある定型の郵便物Mを複数通まとめて受け入れて、1通ずつ取り出して後段の処理部へ供給する。搬送機構108は、供給された郵便物Mを後段の処理部102〜107を通して搬送する。
【0011】
機械検知部102は、搬送されてくる郵便物Mに含まれる金属、異物、硬物を検知するとともに、郵便物Mの2枚取り、すなわち、重送、やショートギャップを検知し、後段の各処理部103ないし107で処理不能と判断された郵便物Mを図示しない排除集積部へリジェクトする。この機械検知部102は、搬送されている郵便物Mの重量を検知する後述の重量検知装置を備えている。
【0012】
機械検知部102では、この他に、重量検知装置の手前で、郵便物Mの搬送方向に沿った長さや幅を予め検出するとともに、後述するタイミングセンサーを介して郵便物Mの先端通過および後端通過を検知して、当該郵便物Mの搬送位置に関する情報を前もって取得する。
【0013】
OCRスキャナ部103は、郵便物Mの表面を光学的に読み取って光電変換し、郵便物M上に記載されている郵便番号や受取人住所などの区分情報を画像として取得する。また、OCRスキャナ部103は、郵便物Mに貼り付けられている切手(料金計器などを含む料額印面)の有無および位置を検出する。供給部101を介して供給される郵便物Mの向きく表裏天地)がばらばらであるため、OCRスキャナ部103は、郵便物Mの両面を読み取るための少なくとも2つのスキャナ部を有する。
【0014】
ひねり反転部104は、郵便物Mの搬送方向に沿って延びた中心軸を中心に郵便物Mを180度ひねりながら搬送するひねり反転パス(図示せず)を有する。つまり、ひねり反転部104では、郵便物Mの搬送方向を変えずに表裏だけを反転する。また、ひねり反転部104は、送り込まれた郵便物Mをひねり反転パスに送り込まずに迂回させるための迂回搬送路(ストレートパス)(図示せず)を有する。
【0015】
スイッチバック部105は、搬送される郵便物Mを受け入れて逆方向に送り出すことにより郵便物Mの搬送方向を逆転させる2つのスイッチバック機構(図示せず)を有する。スイッチバック部105も、上述したひねり反転部104と同様に、2つのスイッチバック機構を迂回させる迂回搬送路(ストレートパス)を有する。
【0016】
押印部106は、搬送される郵便物Mの1方の表面に接触して回転する図示しない押印ハブを有する。押印部106では、この押印ハブを切手の部位に転接させて消印を押印する。本実施形態では、押印部106に搬送される全ての郵便物Mがひねり反転部104およびスイッチバック部105を通過して表裏および天地が揃えられているため、押印ハブを搬送路1の1側にだけ設けられている。
【0017】
区分集積部107は、OCRスキャナ部103で検出した区分情報に応じて各郵便物Mを所定の区分位置へ区分集積する。また、区分集積部107は、スイッチバック部105内で一時的に滞留して送り出された郵便物Mなどを、押印部106による押印を禁止して、リジエクトする図示しない排除集積部を有する。
【0018】
上記押印装置100は、例えば、上述した重量検知装置で測定した当該郵便物Mの重量に対し、OCRスキャナ部103で当該郵便物Mから読み取った切手などの料額印が適正な金額であるか否かを判断し、料金不足であることを判断した郵便物Mに押印部106で消印を押印することなくリジェクトする。
【0019】
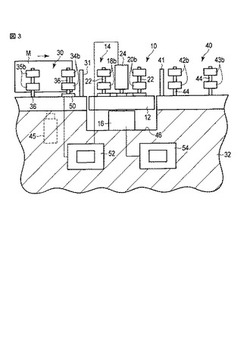
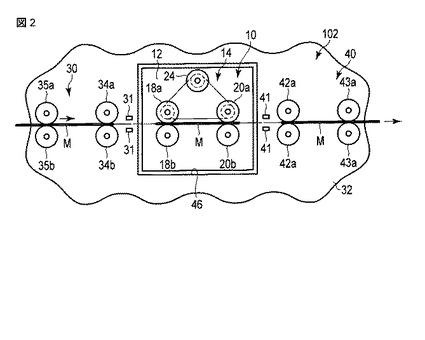
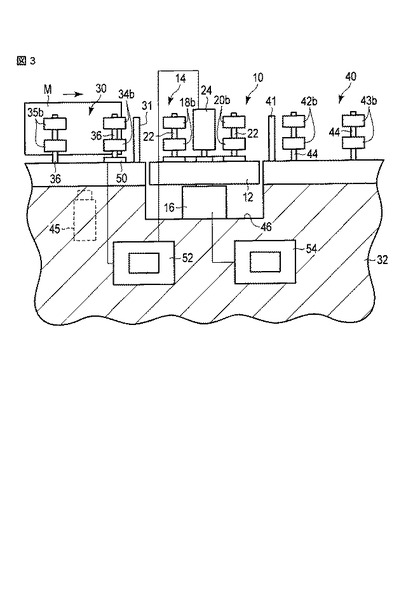
次に、重量検知装置10について詳細に説明する。図2は、搬送路1を通して機械検知部102を通過される郵便物Mの重量を検知(側定)する第1の実施形態に係る重量検知装置10の平面図、図3は、重量検知装置の側面図、図4は、重量検知装置における重量センサを示している。
【0020】
本実施形態に係る重量検知装置10は、搬送路1を介して比較的高速で連続して搬送される複数通の郵便物Mの重量を、郵便物Mの搬送を停止或いは減速させることなく、順次、測定する可能である。なお、本実施形態では、重量検知装置10を含む機械検知部102を通過する郵便物Mは、搬送路1を介して立位状態、すなわち、搬送面が鉛直方向に延した状態で搬送される。
【0021】
図1および図2に示すように、機械検知部102は、郵便物Mを搬送路1に沿って立位状態で搬送する上流側搬送機構30と、同様に、郵便物Mを搬送路1に沿って立位状態で搬送する下流側搬送機構40と、を備え、重量検知装置10は、上流側搬送機構30と下流側搬送機構40との間で搬送路1に設けられ、上流側搬送機構30から搬送されて来る郵便物Mを受取ってこの郵便物の重量を検知した後、郵便物Mを下流側搬送機構40へ送り出す。
【0022】
上流側搬送機構30は、機械検知部102のベース32上に設けられた2組の搬送ローラ34a、34bおよび35a、35bを有している。各搬送ローラは、ベース32にほぼ鉛直に立設された回転軸36に取り付けられ、この回転軸と一体に回転可能となっている。各組の搬送ローラ34a、34bあるいは35a、35bは、互いに隣接対向して位置し、郵便物Mを間に挟んで搬送する。2組の搬送ローラ34a、34bおよび35a、35bは、搬送路1に沿って、最短長さの郵便物の長さよりも僅かに短い間隔をおいて配置されている。また、上流側搬送機構30は、搬送ローラの回転軸を回転させるインジェクションモータ45等を備え、搬送ローラを回転させることにより、搬送ローラ間に郵便物Mを挟んだ状態で所定の搬送速度で搬送する。上流側搬送機構30の下流側には、郵便物Mの通過を検知する通過センサ31が設けられている。
【0023】
同様に、下流側搬送機構40は、機械検知部102のベース32上に設けられた2組の搬送ローラ42a、42bおよび43a、43bを有している。各搬送ローラは、ベース32にほぼ鉛直に立設された回転軸44に取り付けられ、この回転軸と一体に回転可能となっている。各組の搬送ローラ42a、42bあるいは43a、43bは、互いに隣接対向して位置し、郵便物Mを間に挟んで搬送する。2組の搬送ローラ42a、42bおよび43a、43bは、搬送路1に沿って、最短長さの郵便物の長さよりも僅かに短い間隔をおいて配置されている。また、下流側機構40は、搬送ローラの回転軸を回転させるインジェクションモータ等を備え、搬送ローラを回転させることにより、搬送ローラ間に郵便物Mを挟んだ状態で所定の搬送速度で搬送する。駆動するインジェクションモータは、上流側搬送機構30と共通のインジェクションモータでもよい。下流側搬送機構40の上流側近傍には、郵便物Mの通過を検知する通過センサ41が設けられている。
【0024】
重量検知装置10は、上流側搬送機構30と下流側搬送機構40との間で、ベース32の上面に形成された凹所46内に隙間をおいて独立して配置された支持体12と、支持体12上に設けられ、郵便物Mを回転体で挟んで搬送する検知側の搬送機構14と、郵便物を搬送中の搬送機構14および支持体12の重量を検知する重量センサ16と、を備えている。
【0025】
支持体12は、例えば、矩形板状に形成され、その上面は、ベース32の上面とほぼ同一平面上に位置し、搬送路1の一部を構成している。搬送機構14は、支持体12上に設けられた2組の搬送ローラ18a、18bおよび20a、20bを有している。各搬送ローラは、支持体12にほぼ鉛直に立設された回転軸22に取り付けられ、この回転軸と一体に回転可能となっている。各組の搬送ローラ18a、18bあるいは20a、20bは、互いに隣接対向して位置し、郵便物Mを間に挟んで搬送する。2組の搬送ローラ18a、18bおよび20a、20bは、搬送路1に沿って、最短長さの郵便物の長さよりも僅かに短い間隔をおいて配置されている。また、搬送機構14は、支持体12上に載置され搬送ローラの回転軸44を回転させるサーボモータ24等を備え、搬送ローラ18a、18b、20a、20bを回転させることにより、搬送ローラ間に郵便物Mを挟んだ状態で所定の搬送速度で搬送する。
【0026】
重量センサ16は、例えば、力覚センサであり、ベース32に形成された凹所46の底面上に設置され、この重量センサ16上に支持体12が載置されている。図4に示すように、重量センサ16は、両端の閉塞した円筒状のケース23、鉛直方向に沿って移動可能にケース23内に設けられた検出ロッド25、検出ロッドの下端に接触して設けられたたわみ部(ダイアフラム)26、たわみ部に隙間を置いて対向配置され、たわみ部のたわみ(変位)を非接触で検出するたわみ検出部27を備えている。検出ロッド25の上端部は、ケース23から上方に突出し、この検出ロッドの上端に、支持体12が固定および支持されている。検出ロッド25の中途部には、検出ロッドの過度の移動を規制し破損を防止するストッパ28が設けられている。そして、検出ロッド25が支持体12、搬送機構14、および郵便物Mの荷重を受けて移動すると、たわみ部26がたわみ、このたわみをたわみ検出部27で検出することにより、荷重、すなわち、重量を検知する。
【0027】
図3に示すように、重量検知装置10は、少なくとも上流側搬送機構30における郵便物Mの搬送速度を検出する検出器として、例えば、ローラ回転軸36の回転速度を検出するエンコーダ50と、エンコーダ50により得られた速度情報を基に、搬送機構14による郵便物Mの搬送速度が、検出された搬送速度と一致するように、搬送機構14の搬送速度を制御する制御装置52と、重量センサ16の検出信号を処理し、重量を測定する演算装置54と、を備えている。
【0028】
制御装置52は、エンコーダ50からの検出信号に基づいて上流側搬送機構30における郵便物Mの搬送速度を算出し、この算出された搬送速度に応じて、重量検知装置10のサーボモータ24の回転速度を制御する。演算装置54は、郵便物Mが重量検知装置10を通過中に、重量検知装置および郵便物Mの合計の重量を検出し、この合計重量から重量検知装置10の重量を減算することにより、郵便物Mの重量を算出する。
【0029】
次に、上記のように構成された重量検知装置10の動作について説明する。
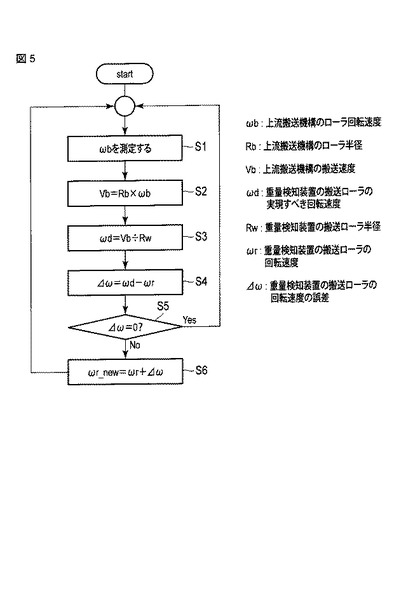
押印装置100の動作開始に伴い、上流側搬送機構30、下流側搬送機構40、および重量検知装置10の搬送機構14は、それぞれ所定の搬送速度で駆動される。図5に示すように、重量検知装置10の制御装置52は、エンコーダ50からの検出信号に基づいて上流側搬送機構30における搬送ローラ34a、34bの回転速度ωbを測定し(S1)、この回転速度ωbと搬送ローラ34a、34bの半径Rbとから上流側搬送機構30における郵便物Mの搬送速度Vb(=ωb×Rb)を算出する(S2)。更に、制御装置52は、上流側搬送機構30における郵便物Mの搬送速度Vbと重量検知装置10の搬送機構14における郵便物Mの搬送速度とを一致させるための搬送ローラ18a、18b、20a、20bの回転速度、つまり、実現すべき回転速度ωdを、上記算出した搬送速度Vbと重量検知装置10の搬送ローラ18a、18b、20a、20bの半径Rwとから算出する(ωd=Vb÷Rw)(S3)。
【0030】
次いで、制御装置52は、算出した実現すべき回転速度ωdと搬送ローラ18a、18b、20a、20bの実際の回転速度ωrとの誤差Δωを求め(S4)、この誤差Δωがゼロであるか否かを検出する(S5)。なお、搬送ローラ18a、18b、20a、20bの実際の回転速度ωrは、制御装置52により搬送機構14のサーボモータ24の回転速度を検出することにより得られる。制御装置52は、誤差Δωがゼロの場合、すなわち、上流側搬送機構30による郵便物の搬送速度と、重量検知装置10の搬送機構14による郵便物の搬送速度とが一致している場合、上記動作S1ないしS5を繰り返す。また、誤差Δωがゼロでない場合、すなわち、上流側搬送機構30による郵便物の搬送速度と、重量検知装置10の搬送機構14による郵便物の搬送速度とが一致している場合、制御装置52は、サーボモータ24の回転速度を制御し、搬送ローラ18a、18b、20a、20bの回転速度ωrを誤差Δωがゼロとなる回転速度ωnew=ωb+Δωに調整する(S6)。これにより、制御装置52は、装置の動作中、エンコーダ50により得られた速度情報を基に、重量検知装置10の搬送機構14による郵便物Mの搬送速度が、検出された上流側搬送機構30による搬送速度と一致するように、搬送機構14の搬送速度を制御する。
【0031】
重量検知装置10は、上流側搬送機構30から送られてくる郵便物Mを受取り、搬送機構14により上記のように上流側搬送機構30と同一の搬送速度で郵便物Mを搬送し、更に、下流側搬送機構40に郵便物Mを送りだす。その際、重量検知装置10は、上流側搬送機構30の通過センサ34により郵便物Mの後端が検知された時点から下流側搬送機構40の通過センサ41により郵便物Mの先端が検知されるまでの間に重量検知を行う。つまり、重量検知装置10は、郵便物Mが搬送ローラ18a、18b、20a、20bに挟まれ支持体12上を移動している間に、重量検知を行う。演算装置54は、郵便物Mが重量検知装置10を通過中に、重量センサ16の検出信号に基づき、支持体12、搬送機構14、郵便物Mの合計の重量を検出し、この合計重量から、予め格納されている支持体12および搬送機構14の重量を減算することにより、郵便物Mの重量を算出する。
【0032】
以上のように構成された重量検知装置10によれば、高速高密度で搬送されている途中の郵便物の重量を測定する際、重量検知装置の少なくとも上流側搬送機構30における郵便物の搬送速度と、重量検知装置の搬送機構14における郵便物の搬送速度とを一致させることにより、重量検知装置の搬送機構14において、郵便物の引っ張り、郵便物の追突による重量測定における外乱的な外力を軽減することができる。この結果、重量を測定する重量センサ16内部部材に重量による歪以外の外乱的な外力による歪が発生することを軽減させ、かつ、重量検知装置に不要な振動を発生させないため、高速高密度で搬送される郵便物の重量を連続的に精度良く検知することができる。
【0033】
を備える紙葉類処理装置。
【0034】
次に、他の実施形態に係る重量検知装置について説明する。なお、以下に説明する種々の実施形態において、前述した第1の実施形態と同一の部分には、同一の参照符号を付してその詳細な説明を省略し、第1の実施形態と異なる部分を中心に詳しく説明する。
【0035】
(第2の実施形態)
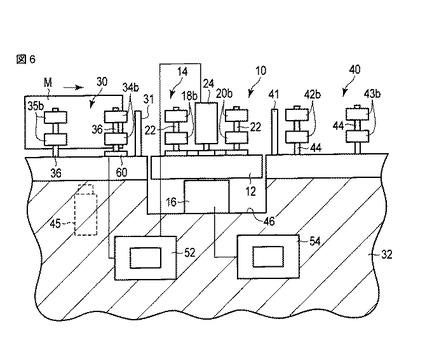
図6は、第2の実施形態に係る重量検知装置を示している。前述した第1の実施形態において、上流側搬送機構の搬送速度を検出する検出器として、エンコーダを用いたが、これに限らず、他の検出器を用いても良い。図6に示すように、第2の実施形態によれば、重量検知装置10は、検出器として、タコジェネレータ60を備えている。このタコジェネレータ60は、上流側搬送機構30における搬送ローラ34a、34bの回転軸36の回転数に比例した電圧を発生し、この回転数(角速度)を検出する。制御装置52は、タコジェネレータ60により検出された回転数に基づいて、上流側搬送機構30による郵便物Mの搬送速度を算出し、この搬送速度と、重量検知装置10の搬送機構14による湯便物の搬送速度が一致するように、搬送機構14の駆動モータを制御する。
【0036】
(第3の実施形態)
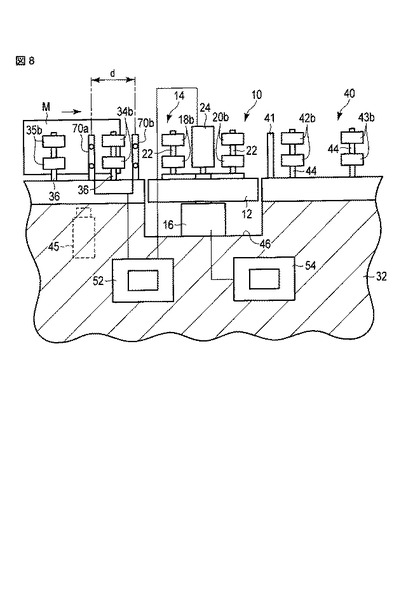
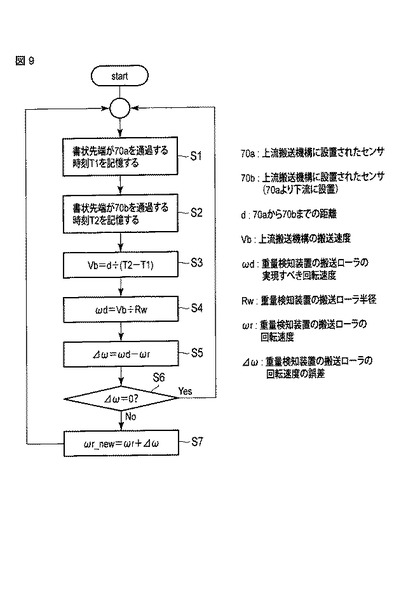
図7および図8は、第3の実施形態に係る重量検知装置10を示し、図9は、搬送速度の検出および制御動作を示すフローチャートである。
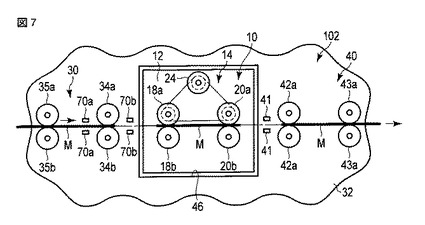
図7および図8に示すように、第3の実施形態によれば、重量検知装置10は、検出器として、2組の光学センサ70a、70bを備えている。1組の光学センサ70aは、例えば、上流側搬送機構30における搬送ローラ34aの上流側に搬送路1を挟んで配置され、他の組の光学センサ70bは、搬送ローラ34aの上流側に搬送路1を挟んで配置されている。これら2組の光学センサ70a、70bは、それぞれ搬送されて来る郵便物Mの通過を検知、すなわち、郵便物Mの先端を検知する。光学センサ70a、70bは、搬送路1に沿って間隔dをおいて設けられている。
【0037】
図9に示すように、搬送速度の制御においては、まず、上流側搬送機構30により搬送される郵便物(書状)の先端を光学センサ70aにより検出し、制御装置52は郵便物が光学センサ70aを通過する時刻T1を記憶する(S1)。更に、制御装置52は、郵便物Mの先端を光学センサ70bにより検出し、郵便物が光学センサ70bを通過する時刻T2を記憶する(S2)。制御装置52は、検出した時刻T1、T2および光学センサ70a、70b間の間隔dから、上流側搬送機構30における郵便物Mの搬送速度Vb(=d÷(T2−T1))を算出する(S3)。
【0038】
更に、制御装置52は、上流側搬送機構30における郵便物Mの搬送速度Vbと重量検知装置10の搬送機構14における郵便物Mの搬送速度とを一致させるための搬送ローラ18a、18b、20a、20bの回転速度、つまり、実現すべき回転速度ωdを、上記算出した搬送速度Vbと重量検知装置10の搬送ローラ18a、18b、20a、20bの半径Rwとから算出する(ωd=Vb÷Rw)(S4)。
【0039】
次いで、制御装置52は、算出した実現すべき回転速度ωdと搬送ローラ18a、18b、20a、20bの実際の回転速度ωrとの誤差Δωを求め(S5)、この誤差Δωがゼロであるか否かを検出する(S6)。なお、搬送ローラ18a、18b、20a、20bの実際の回転速度ωrは、制御装置52により搬送機構14のサーボモータ24の回転速度を検出することにより得られる。
【0040】
制御装置52は、誤差Δωがゼロの場合、すなわち、上流側搬送機構30による郵便物の搬送速度と、重量検知装置10の搬送機構14による郵便物の搬送速度とが一致している場合、上記動作S1ないしS5を繰り返す。また、誤差Δωがゼロでない場合、すなわち、上流側搬送機構30による郵便物の搬送速度と、重量検知装置10の搬送機構14による郵便物の搬送速度とが一致している場合、制御装置52は、サーボモータ24の回転速度を制御し、搬送ローラ18a、18b、20a、20bの回転速度ωrを誤差Δωがゼロとなる回転速度ωnew=ωb+Δωに調整する(S7)。これにより、制御装置52は、装置の動作中、光学センサ70a、70bにより得られた速度情報を基に、重量検知装置10の搬送機構14による郵便物Mの搬送速度が、検出された上流側搬送機構30による搬送速度と一致するように、搬送機構14の搬送速度を制御する。
【0041】
第2および第3の実施形態において、重量検知装置10の他の構成は、前述した第1の実施形態と同一である。そして、第2および第3の実施形態においても、高速高密度で搬送される郵便物の重量を連続的に精度良く検知することが可能な重量検知装置が得られる。
【0042】
本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
例えば、処理する紙葉類は、郵便物に限らず、有価証券、紙幣等の他の紙葉類に適用してもよい。搬送機構において、紙葉類を挟んで搬送する回転体は、搬送ローラに限らず、搬送ベルト等を用いることができる。重量センサは、力覚センサに限らず、他のセンサを用いてもよい。
【符号の説明】
【0043】
10…重量検知装置、12…支持体、14…搬送機構、16…重量センサ、
18a、18b、20a、20b…搬送ローラ、22…回転軸、
24…サーボモータ、30…上流側搬送機構、32…ベース、
34a、34b、35a、35b…搬送ローラ、36…回転軸、
40…下流側搬送機構、42a、42b、43a、43b…搬送ローラ、
44…回転軸、50…エンコーダ、52…制御装置、54…演算装置、
60…タコジェネレータ、70a、70b…光学センサ
【技術分野】
【0001】
この発明の実施形態は、郵便物などの紙葉類の重量を測定する重量検知装置、およびこの重量検知装置を備えた紙葉類処理装置に関する。
【背景技術】
【0002】
紙葉類集積装置として、例えば、郵便物処理機では、搬送中の郵便物の重量を量って、当該郵便物に貼ってある切手などの料額印が適正な金額であるか否かを判断する。搬送中の郵便物の重量を測定する装置として、例えば、搬送路の途中にある搬送系を郵便物が通過しているときの郵便物を含む搬送系全体の重量をセンサで測定する重量検知装置が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−039055号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような重量検知装置において、少なくとも上流側から搬送されてくる郵便物の搬送速度と、重量検知装置を構成する搬送系における郵便物の搬送速度が一致していない場合、重量検知装置の搬送系が郵便物を引張り、あるいは、郵便物の突入力を受けることになる。この結果、重量を検出するセンサに重量以外の外力による影響が加わり、センサ内部部材の不要な歪を発生させる。また、この外乱的な外力により重量検知装置に不要な振動を発生させる。そのため、重量によるセンサ内部部材の歪にこの外乱による歪が重畳され、重量の検出精度が低下する。
【0005】
この発明の課題は、高速で搬送される紙葉類の重量を連続的に精度良く検知することができる重量検知装置、この重量検知装置を備えた紙葉類処理装置を提供することにある。
【課題を解決するための手段】
【0006】
実施形態によれば、重量検知装置は、回転体に挟まれた状態で上流側から搬送されて来る紙葉類を受取って紙葉類の重量を検知する重量検知装置であって、紙葉類を搬送する搬送路に独立して設けられた支持体と、前記支持体上に設けられ、紙葉類を回転体で挟んで搬送する搬送機構と、紙葉類を搬送中の前記搬送機構および支持体の重量を検知する重量センサと、少なくとも前記支持体よりも上流の上流側搬送機構における紙葉類の搬送速度を検出する検出器と、前記検出器により得られた速度情報を基に、前記搬送機構による紙葉類の搬送速度が、検出された搬送速度と一致するように、前記搬送機構の搬送速度を制御する制御装置と、を備えている。
【図面の簡単な説明】
【0007】
【図1】図1は、第1の実施形態に係る重量検知装置を備える押印装置を概略的に示すブロック図。
【図2】図2は、前記重量検知装置を示す平面図。
【図3】図3は、前記重量検知装置の正面図。
【図4】図4は、前記重量検知装置の重量センサを示す斜視図および断面図。
【図5】図5は、前記重量検知装置の搬送速度制御動作を示すフローチャート。
【図6】図6は、第2の実施形態に係る重量検知装置を示す側面図。
【図7】図7は、第3の実施形態に係る重量検知装置を示す平面図。
【図8】図7は、前記第3の実施形態に係る重量検知装置の側面図。
【図9】図9は、前記第3の実施形態に係る重量検知装置の搬送速度制御動作を示すフローチャート。
【発明を実施するための形態】
【0008】
以下、図面を参照しながら実施形態について、詳細に説明する。
(第1の実施形態)
図1は、第1の実施形態に係る重量検知装置を備えた紙葉類処理装置の一例として、郵便物選別取り揃え押印装置100(以下、単に押印装置100と称する)を概略的に示すブロック図である。
【0009】
図1に示すように、押印装置100は、紙葉類としての郵便物Mの搬送方向に沿って、供給部101、機械検知部102、OCRスキャナ部103、ひねり反転部104、スイッチバック部105、押印部106、および区分集積部107を備えている。押印装置100は、上述した各部を通る搬送路1に沿って郵便物Mを搬送する搬送機構108を有する。さらに、押印装置100は、装置に対して種々の操作を指示するとともに、動作モードの切り換え入力や異常表示等をする図示しない操作パネルを有する。
【0010】
供給部101は、例えば、厚さ、搬送方向に沿った長さ、搬送方向と直交する方向に沿った幅、および重量が一定範囲内にある定型の郵便物Mを複数通まとめて受け入れて、1通ずつ取り出して後段の処理部へ供給する。搬送機構108は、供給された郵便物Mを後段の処理部102〜107を通して搬送する。
【0011】
機械検知部102は、搬送されてくる郵便物Mに含まれる金属、異物、硬物を検知するとともに、郵便物Mの2枚取り、すなわち、重送、やショートギャップを検知し、後段の各処理部103ないし107で処理不能と判断された郵便物Mを図示しない排除集積部へリジェクトする。この機械検知部102は、搬送されている郵便物Mの重量を検知する後述の重量検知装置を備えている。
【0012】
機械検知部102では、この他に、重量検知装置の手前で、郵便物Mの搬送方向に沿った長さや幅を予め検出するとともに、後述するタイミングセンサーを介して郵便物Mの先端通過および後端通過を検知して、当該郵便物Mの搬送位置に関する情報を前もって取得する。
【0013】
OCRスキャナ部103は、郵便物Mの表面を光学的に読み取って光電変換し、郵便物M上に記載されている郵便番号や受取人住所などの区分情報を画像として取得する。また、OCRスキャナ部103は、郵便物Mに貼り付けられている切手(料金計器などを含む料額印面)の有無および位置を検出する。供給部101を介して供給される郵便物Mの向きく表裏天地)がばらばらであるため、OCRスキャナ部103は、郵便物Mの両面を読み取るための少なくとも2つのスキャナ部を有する。
【0014】
ひねり反転部104は、郵便物Mの搬送方向に沿って延びた中心軸を中心に郵便物Mを180度ひねりながら搬送するひねり反転パス(図示せず)を有する。つまり、ひねり反転部104では、郵便物Mの搬送方向を変えずに表裏だけを反転する。また、ひねり反転部104は、送り込まれた郵便物Mをひねり反転パスに送り込まずに迂回させるための迂回搬送路(ストレートパス)(図示せず)を有する。
【0015】
スイッチバック部105は、搬送される郵便物Mを受け入れて逆方向に送り出すことにより郵便物Mの搬送方向を逆転させる2つのスイッチバック機構(図示せず)を有する。スイッチバック部105も、上述したひねり反転部104と同様に、2つのスイッチバック機構を迂回させる迂回搬送路(ストレートパス)を有する。
【0016】
押印部106は、搬送される郵便物Mの1方の表面に接触して回転する図示しない押印ハブを有する。押印部106では、この押印ハブを切手の部位に転接させて消印を押印する。本実施形態では、押印部106に搬送される全ての郵便物Mがひねり反転部104およびスイッチバック部105を通過して表裏および天地が揃えられているため、押印ハブを搬送路1の1側にだけ設けられている。
【0017】
区分集積部107は、OCRスキャナ部103で検出した区分情報に応じて各郵便物Mを所定の区分位置へ区分集積する。また、区分集積部107は、スイッチバック部105内で一時的に滞留して送り出された郵便物Mなどを、押印部106による押印を禁止して、リジエクトする図示しない排除集積部を有する。
【0018】
上記押印装置100は、例えば、上述した重量検知装置で測定した当該郵便物Mの重量に対し、OCRスキャナ部103で当該郵便物Mから読み取った切手などの料額印が適正な金額であるか否かを判断し、料金不足であることを判断した郵便物Mに押印部106で消印を押印することなくリジェクトする。
【0019】
次に、重量検知装置10について詳細に説明する。図2は、搬送路1を通して機械検知部102を通過される郵便物Mの重量を検知(側定)する第1の実施形態に係る重量検知装置10の平面図、図3は、重量検知装置の側面図、図4は、重量検知装置における重量センサを示している。
【0020】
本実施形態に係る重量検知装置10は、搬送路1を介して比較的高速で連続して搬送される複数通の郵便物Mの重量を、郵便物Mの搬送を停止或いは減速させることなく、順次、測定する可能である。なお、本実施形態では、重量検知装置10を含む機械検知部102を通過する郵便物Mは、搬送路1を介して立位状態、すなわち、搬送面が鉛直方向に延した状態で搬送される。
【0021】
図1および図2に示すように、機械検知部102は、郵便物Mを搬送路1に沿って立位状態で搬送する上流側搬送機構30と、同様に、郵便物Mを搬送路1に沿って立位状態で搬送する下流側搬送機構40と、を備え、重量検知装置10は、上流側搬送機構30と下流側搬送機構40との間で搬送路1に設けられ、上流側搬送機構30から搬送されて来る郵便物Mを受取ってこの郵便物の重量を検知した後、郵便物Mを下流側搬送機構40へ送り出す。
【0022】
上流側搬送機構30は、機械検知部102のベース32上に設けられた2組の搬送ローラ34a、34bおよび35a、35bを有している。各搬送ローラは、ベース32にほぼ鉛直に立設された回転軸36に取り付けられ、この回転軸と一体に回転可能となっている。各組の搬送ローラ34a、34bあるいは35a、35bは、互いに隣接対向して位置し、郵便物Mを間に挟んで搬送する。2組の搬送ローラ34a、34bおよび35a、35bは、搬送路1に沿って、最短長さの郵便物の長さよりも僅かに短い間隔をおいて配置されている。また、上流側搬送機構30は、搬送ローラの回転軸を回転させるインジェクションモータ45等を備え、搬送ローラを回転させることにより、搬送ローラ間に郵便物Mを挟んだ状態で所定の搬送速度で搬送する。上流側搬送機構30の下流側には、郵便物Mの通過を検知する通過センサ31が設けられている。
【0023】
同様に、下流側搬送機構40は、機械検知部102のベース32上に設けられた2組の搬送ローラ42a、42bおよび43a、43bを有している。各搬送ローラは、ベース32にほぼ鉛直に立設された回転軸44に取り付けられ、この回転軸と一体に回転可能となっている。各組の搬送ローラ42a、42bあるいは43a、43bは、互いに隣接対向して位置し、郵便物Mを間に挟んで搬送する。2組の搬送ローラ42a、42bおよび43a、43bは、搬送路1に沿って、最短長さの郵便物の長さよりも僅かに短い間隔をおいて配置されている。また、下流側機構40は、搬送ローラの回転軸を回転させるインジェクションモータ等を備え、搬送ローラを回転させることにより、搬送ローラ間に郵便物Mを挟んだ状態で所定の搬送速度で搬送する。駆動するインジェクションモータは、上流側搬送機構30と共通のインジェクションモータでもよい。下流側搬送機構40の上流側近傍には、郵便物Mの通過を検知する通過センサ41が設けられている。
【0024】
重量検知装置10は、上流側搬送機構30と下流側搬送機構40との間で、ベース32の上面に形成された凹所46内に隙間をおいて独立して配置された支持体12と、支持体12上に設けられ、郵便物Mを回転体で挟んで搬送する検知側の搬送機構14と、郵便物を搬送中の搬送機構14および支持体12の重量を検知する重量センサ16と、を備えている。
【0025】
支持体12は、例えば、矩形板状に形成され、その上面は、ベース32の上面とほぼ同一平面上に位置し、搬送路1の一部を構成している。搬送機構14は、支持体12上に設けられた2組の搬送ローラ18a、18bおよび20a、20bを有している。各搬送ローラは、支持体12にほぼ鉛直に立設された回転軸22に取り付けられ、この回転軸と一体に回転可能となっている。各組の搬送ローラ18a、18bあるいは20a、20bは、互いに隣接対向して位置し、郵便物Mを間に挟んで搬送する。2組の搬送ローラ18a、18bおよび20a、20bは、搬送路1に沿って、最短長さの郵便物の長さよりも僅かに短い間隔をおいて配置されている。また、搬送機構14は、支持体12上に載置され搬送ローラの回転軸44を回転させるサーボモータ24等を備え、搬送ローラ18a、18b、20a、20bを回転させることにより、搬送ローラ間に郵便物Mを挟んだ状態で所定の搬送速度で搬送する。
【0026】
重量センサ16は、例えば、力覚センサであり、ベース32に形成された凹所46の底面上に設置され、この重量センサ16上に支持体12が載置されている。図4に示すように、重量センサ16は、両端の閉塞した円筒状のケース23、鉛直方向に沿って移動可能にケース23内に設けられた検出ロッド25、検出ロッドの下端に接触して設けられたたわみ部(ダイアフラム)26、たわみ部に隙間を置いて対向配置され、たわみ部のたわみ(変位)を非接触で検出するたわみ検出部27を備えている。検出ロッド25の上端部は、ケース23から上方に突出し、この検出ロッドの上端に、支持体12が固定および支持されている。検出ロッド25の中途部には、検出ロッドの過度の移動を規制し破損を防止するストッパ28が設けられている。そして、検出ロッド25が支持体12、搬送機構14、および郵便物Mの荷重を受けて移動すると、たわみ部26がたわみ、このたわみをたわみ検出部27で検出することにより、荷重、すなわち、重量を検知する。
【0027】
図3に示すように、重量検知装置10は、少なくとも上流側搬送機構30における郵便物Mの搬送速度を検出する検出器として、例えば、ローラ回転軸36の回転速度を検出するエンコーダ50と、エンコーダ50により得られた速度情報を基に、搬送機構14による郵便物Mの搬送速度が、検出された搬送速度と一致するように、搬送機構14の搬送速度を制御する制御装置52と、重量センサ16の検出信号を処理し、重量を測定する演算装置54と、を備えている。
【0028】
制御装置52は、エンコーダ50からの検出信号に基づいて上流側搬送機構30における郵便物Mの搬送速度を算出し、この算出された搬送速度に応じて、重量検知装置10のサーボモータ24の回転速度を制御する。演算装置54は、郵便物Mが重量検知装置10を通過中に、重量検知装置および郵便物Mの合計の重量を検出し、この合計重量から重量検知装置10の重量を減算することにより、郵便物Mの重量を算出する。
【0029】
次に、上記のように構成された重量検知装置10の動作について説明する。
押印装置100の動作開始に伴い、上流側搬送機構30、下流側搬送機構40、および重量検知装置10の搬送機構14は、それぞれ所定の搬送速度で駆動される。図5に示すように、重量検知装置10の制御装置52は、エンコーダ50からの検出信号に基づいて上流側搬送機構30における搬送ローラ34a、34bの回転速度ωbを測定し(S1)、この回転速度ωbと搬送ローラ34a、34bの半径Rbとから上流側搬送機構30における郵便物Mの搬送速度Vb(=ωb×Rb)を算出する(S2)。更に、制御装置52は、上流側搬送機構30における郵便物Mの搬送速度Vbと重量検知装置10の搬送機構14における郵便物Mの搬送速度とを一致させるための搬送ローラ18a、18b、20a、20bの回転速度、つまり、実現すべき回転速度ωdを、上記算出した搬送速度Vbと重量検知装置10の搬送ローラ18a、18b、20a、20bの半径Rwとから算出する(ωd=Vb÷Rw)(S3)。
【0030】
次いで、制御装置52は、算出した実現すべき回転速度ωdと搬送ローラ18a、18b、20a、20bの実際の回転速度ωrとの誤差Δωを求め(S4)、この誤差Δωがゼロであるか否かを検出する(S5)。なお、搬送ローラ18a、18b、20a、20bの実際の回転速度ωrは、制御装置52により搬送機構14のサーボモータ24の回転速度を検出することにより得られる。制御装置52は、誤差Δωがゼロの場合、すなわち、上流側搬送機構30による郵便物の搬送速度と、重量検知装置10の搬送機構14による郵便物の搬送速度とが一致している場合、上記動作S1ないしS5を繰り返す。また、誤差Δωがゼロでない場合、すなわち、上流側搬送機構30による郵便物の搬送速度と、重量検知装置10の搬送機構14による郵便物の搬送速度とが一致している場合、制御装置52は、サーボモータ24の回転速度を制御し、搬送ローラ18a、18b、20a、20bの回転速度ωrを誤差Δωがゼロとなる回転速度ωnew=ωb+Δωに調整する(S6)。これにより、制御装置52は、装置の動作中、エンコーダ50により得られた速度情報を基に、重量検知装置10の搬送機構14による郵便物Mの搬送速度が、検出された上流側搬送機構30による搬送速度と一致するように、搬送機構14の搬送速度を制御する。
【0031】
重量検知装置10は、上流側搬送機構30から送られてくる郵便物Mを受取り、搬送機構14により上記のように上流側搬送機構30と同一の搬送速度で郵便物Mを搬送し、更に、下流側搬送機構40に郵便物Mを送りだす。その際、重量検知装置10は、上流側搬送機構30の通過センサ34により郵便物Mの後端が検知された時点から下流側搬送機構40の通過センサ41により郵便物Mの先端が検知されるまでの間に重量検知を行う。つまり、重量検知装置10は、郵便物Mが搬送ローラ18a、18b、20a、20bに挟まれ支持体12上を移動している間に、重量検知を行う。演算装置54は、郵便物Mが重量検知装置10を通過中に、重量センサ16の検出信号に基づき、支持体12、搬送機構14、郵便物Mの合計の重量を検出し、この合計重量から、予め格納されている支持体12および搬送機構14の重量を減算することにより、郵便物Mの重量を算出する。
【0032】
以上のように構成された重量検知装置10によれば、高速高密度で搬送されている途中の郵便物の重量を測定する際、重量検知装置の少なくとも上流側搬送機構30における郵便物の搬送速度と、重量検知装置の搬送機構14における郵便物の搬送速度とを一致させることにより、重量検知装置の搬送機構14において、郵便物の引っ張り、郵便物の追突による重量測定における外乱的な外力を軽減することができる。この結果、重量を測定する重量センサ16内部部材に重量による歪以外の外乱的な外力による歪が発生することを軽減させ、かつ、重量検知装置に不要な振動を発生させないため、高速高密度で搬送される郵便物の重量を連続的に精度良く検知することができる。
【0033】
を備える紙葉類処理装置。
【0034】
次に、他の実施形態に係る重量検知装置について説明する。なお、以下に説明する種々の実施形態において、前述した第1の実施形態と同一の部分には、同一の参照符号を付してその詳細な説明を省略し、第1の実施形態と異なる部分を中心に詳しく説明する。
【0035】
(第2の実施形態)
図6は、第2の実施形態に係る重量検知装置を示している。前述した第1の実施形態において、上流側搬送機構の搬送速度を検出する検出器として、エンコーダを用いたが、これに限らず、他の検出器を用いても良い。図6に示すように、第2の実施形態によれば、重量検知装置10は、検出器として、タコジェネレータ60を備えている。このタコジェネレータ60は、上流側搬送機構30における搬送ローラ34a、34bの回転軸36の回転数に比例した電圧を発生し、この回転数(角速度)を検出する。制御装置52は、タコジェネレータ60により検出された回転数に基づいて、上流側搬送機構30による郵便物Mの搬送速度を算出し、この搬送速度と、重量検知装置10の搬送機構14による湯便物の搬送速度が一致するように、搬送機構14の駆動モータを制御する。
【0036】
(第3の実施形態)
図7および図8は、第3の実施形態に係る重量検知装置10を示し、図9は、搬送速度の検出および制御動作を示すフローチャートである。
図7および図8に示すように、第3の実施形態によれば、重量検知装置10は、検出器として、2組の光学センサ70a、70bを備えている。1組の光学センサ70aは、例えば、上流側搬送機構30における搬送ローラ34aの上流側に搬送路1を挟んで配置され、他の組の光学センサ70bは、搬送ローラ34aの上流側に搬送路1を挟んで配置されている。これら2組の光学センサ70a、70bは、それぞれ搬送されて来る郵便物Mの通過を検知、すなわち、郵便物Mの先端を検知する。光学センサ70a、70bは、搬送路1に沿って間隔dをおいて設けられている。
【0037】
図9に示すように、搬送速度の制御においては、まず、上流側搬送機構30により搬送される郵便物(書状)の先端を光学センサ70aにより検出し、制御装置52は郵便物が光学センサ70aを通過する時刻T1を記憶する(S1)。更に、制御装置52は、郵便物Mの先端を光学センサ70bにより検出し、郵便物が光学センサ70bを通過する時刻T2を記憶する(S2)。制御装置52は、検出した時刻T1、T2および光学センサ70a、70b間の間隔dから、上流側搬送機構30における郵便物Mの搬送速度Vb(=d÷(T2−T1))を算出する(S3)。
【0038】
更に、制御装置52は、上流側搬送機構30における郵便物Mの搬送速度Vbと重量検知装置10の搬送機構14における郵便物Mの搬送速度とを一致させるための搬送ローラ18a、18b、20a、20bの回転速度、つまり、実現すべき回転速度ωdを、上記算出した搬送速度Vbと重量検知装置10の搬送ローラ18a、18b、20a、20bの半径Rwとから算出する(ωd=Vb÷Rw)(S4)。
【0039】
次いで、制御装置52は、算出した実現すべき回転速度ωdと搬送ローラ18a、18b、20a、20bの実際の回転速度ωrとの誤差Δωを求め(S5)、この誤差Δωがゼロであるか否かを検出する(S6)。なお、搬送ローラ18a、18b、20a、20bの実際の回転速度ωrは、制御装置52により搬送機構14のサーボモータ24の回転速度を検出することにより得られる。
【0040】
制御装置52は、誤差Δωがゼロの場合、すなわち、上流側搬送機構30による郵便物の搬送速度と、重量検知装置10の搬送機構14による郵便物の搬送速度とが一致している場合、上記動作S1ないしS5を繰り返す。また、誤差Δωがゼロでない場合、すなわち、上流側搬送機構30による郵便物の搬送速度と、重量検知装置10の搬送機構14による郵便物の搬送速度とが一致している場合、制御装置52は、サーボモータ24の回転速度を制御し、搬送ローラ18a、18b、20a、20bの回転速度ωrを誤差Δωがゼロとなる回転速度ωnew=ωb+Δωに調整する(S7)。これにより、制御装置52は、装置の動作中、光学センサ70a、70bにより得られた速度情報を基に、重量検知装置10の搬送機構14による郵便物Mの搬送速度が、検出された上流側搬送機構30による搬送速度と一致するように、搬送機構14の搬送速度を制御する。
【0041】
第2および第3の実施形態において、重量検知装置10の他の構成は、前述した第1の実施形態と同一である。そして、第2および第3の実施形態においても、高速高密度で搬送される郵便物の重量を連続的に精度良く検知することが可能な重量検知装置が得られる。
【0042】
本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
例えば、処理する紙葉類は、郵便物に限らず、有価証券、紙幣等の他の紙葉類に適用してもよい。搬送機構において、紙葉類を挟んで搬送する回転体は、搬送ローラに限らず、搬送ベルト等を用いることができる。重量センサは、力覚センサに限らず、他のセンサを用いてもよい。
【符号の説明】
【0043】
10…重量検知装置、12…支持体、14…搬送機構、16…重量センサ、
18a、18b、20a、20b…搬送ローラ、22…回転軸、
24…サーボモータ、30…上流側搬送機構、32…ベース、
34a、34b、35a、35b…搬送ローラ、36…回転軸、
40…下流側搬送機構、42a、42b、43a、43b…搬送ローラ、
44…回転軸、50…エンコーダ、52…制御装置、54…演算装置、
60…タコジェネレータ、70a、70b…光学センサ
【特許請求の範囲】
【請求項1】
回転体に挟まれた状態で上流側から搬送されて来る紙葉類を受取って紙葉類の重量を検知する重量検知装置であって、
紙葉類を搬送する搬送路に独立して設けられた支持体と、
前記支持体上に設けられ、紙葉類を回転体で挟んで搬送する搬送機構と、紙葉類を搬送中の前記搬送機構および支持体の重量を検知する重量センサと、
少なくとも前記支持体よりも上流側の上流側搬送機構における紙葉類の搬送速度を検出する検出器と、
前記検出器により得られた速度情報を基に、前記搬送機構による紙葉類の搬送速度が、検出された搬送速度と一致するように、前記搬送機構の搬送速度を制御する制御装置と、
を備える重量検知装置。
【請求項2】
前記搬送機構は、紙葉類を挟んで搬送する複数の回転体と、これらの回転体の少なくとも1つを回転する駆動モータと、を備え、
前記制御装置は、前記検出器により検出された搬送速度と前記搬送機構による紙葉類の搬送速度との差がゼロとなるように、前記駆動モータの回転速度を制御する請求項1に記載の重量検知装置。
【請求項3】
前記検出器は、前記上流側搬送機構における回転体の回転速度を検出するエンコーダを備えている請求項1又は2に記載の重量検知装置。
【請求項4】
前記検出器は、前記上流側搬送機構における回転体の回転速度を検出するたこジェネレータを備えている請求項1又は2に記載の重量検知装置。
【請求項5】
前記検出器は、前記上流側搬送機構における紙葉類の通過を検知する光学センサを備えている請求項1又は2に記載の重量検知装置。
【請求項6】
紙葉類を搬送する搬送路に設けられ複数の回転体により紙葉類を挟んで搬送する上流側搬送機構と、
前記搬送路に設けられ複数の回転体により紙葉類を挟んで搬送する下流側搬送機構と、
前記上流側搬送機構と下流側搬送機構との間で前記搬送路に設けられ、前記上流側搬送機構から搬送されて来る紙葉類を受取ってこの紙葉類の重量を検知する重量検知装置と、を備え、
前記重量検知装置は、前記搬送路に独立して設けられた支持体と、前記支持体上に設けられ、紙葉類を回転体で挟んで搬送する搬送機構と、紙葉類を搬送中の前記搬送機構および支持体の重量を検知する重量センサと、少なくとも前記上流側搬送機構における紙葉類の搬送速度を検出する検出器と、前記検出器により得られた速度情報を基に、前記搬送機構による紙葉類の搬送速度が、検出された搬送速度と一致するように、前記搬送機構の搬送速度を制御する制御装置と、を備える紙葉類処理装置。
【請求項7】
前記搬送機構は、紙葉類を挟んで搬送する複数の回転体と、これらの回転体の少なくとも1つを回転する駆動モータと、を備え、
前記制御装置は、前記検出器により検出された搬送速度と前記搬送機構による紙葉類の搬送速度との差がゼロとなるように、前記駆動モータの回転速度を制御する請求項6に記載の紙葉類処理装置。
【請求項1】
回転体に挟まれた状態で上流側から搬送されて来る紙葉類を受取って紙葉類の重量を検知する重量検知装置であって、
紙葉類を搬送する搬送路に独立して設けられた支持体と、
前記支持体上に設けられ、紙葉類を回転体で挟んで搬送する搬送機構と、紙葉類を搬送中の前記搬送機構および支持体の重量を検知する重量センサと、
少なくとも前記支持体よりも上流側の上流側搬送機構における紙葉類の搬送速度を検出する検出器と、
前記検出器により得られた速度情報を基に、前記搬送機構による紙葉類の搬送速度が、検出された搬送速度と一致するように、前記搬送機構の搬送速度を制御する制御装置と、
を備える重量検知装置。
【請求項2】
前記搬送機構は、紙葉類を挟んで搬送する複数の回転体と、これらの回転体の少なくとも1つを回転する駆動モータと、を備え、
前記制御装置は、前記検出器により検出された搬送速度と前記搬送機構による紙葉類の搬送速度との差がゼロとなるように、前記駆動モータの回転速度を制御する請求項1に記載の重量検知装置。
【請求項3】
前記検出器は、前記上流側搬送機構における回転体の回転速度を検出するエンコーダを備えている請求項1又は2に記載の重量検知装置。
【請求項4】
前記検出器は、前記上流側搬送機構における回転体の回転速度を検出するたこジェネレータを備えている請求項1又は2に記載の重量検知装置。
【請求項5】
前記検出器は、前記上流側搬送機構における紙葉類の通過を検知する光学センサを備えている請求項1又は2に記載の重量検知装置。
【請求項6】
紙葉類を搬送する搬送路に設けられ複数の回転体により紙葉類を挟んで搬送する上流側搬送機構と、
前記搬送路に設けられ複数の回転体により紙葉類を挟んで搬送する下流側搬送機構と、
前記上流側搬送機構と下流側搬送機構との間で前記搬送路に設けられ、前記上流側搬送機構から搬送されて来る紙葉類を受取ってこの紙葉類の重量を検知する重量検知装置と、を備え、
前記重量検知装置は、前記搬送路に独立して設けられた支持体と、前記支持体上に設けられ、紙葉類を回転体で挟んで搬送する搬送機構と、紙葉類を搬送中の前記搬送機構および支持体の重量を検知する重量センサと、少なくとも前記上流側搬送機構における紙葉類の搬送速度を検出する検出器と、前記検出器により得られた速度情報を基に、前記搬送機構による紙葉類の搬送速度が、検出された搬送速度と一致するように、前記搬送機構の搬送速度を制御する制御装置と、を備える紙葉類処理装置。
【請求項7】
前記搬送機構は、紙葉類を挟んで搬送する複数の回転体と、これらの回転体の少なくとも1つを回転する駆動モータと、を備え、
前記制御装置は、前記検出器により検出された搬送速度と前記搬送機構による紙葉類の搬送速度との差がゼロとなるように、前記駆動モータの回転速度を制御する請求項6に記載の紙葉類処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−67487(P2013−67487A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−206823(P2011−206823)
【出願日】平成23年9月22日(2011.9.22)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月22日(2011.9.22)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]