
重量物の移送方法及び装置
【課題】推進機構付き無限軌道帯スライド装置を逆さに使用してレールなしで移送を可能にするとともに、方向修正を可能にした重量物の移送方法及び装置を提供すること。
【解決手段】外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、無限軌道帯19と推進駆動装置20を支持する受け台18を支持台16に取り付け、支持台16に台座15を重ね合わせ、支持台16と台座15の間を水平調整ジャッキ28にて連結して推進機構付の無限軌道帯スライド装置62を構成し、この装置62を使用し、スライダ49を接地しながら推進駆動装置20にて自走して台座15に載置した重量物11を移送するとともに、台座15に対する支持台16の回転角度を水平調整ジャッキ28により調整する。
【解決手段】外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、無限軌道帯19と推進駆動装置20を支持する受け台18を支持台16に取り付け、支持台16に台座15を重ね合わせ、支持台16と台座15の間を水平調整ジャッキ28にて連結して推進機構付の無限軌道帯スライド装置62を構成し、この装置62を使用し、スライダ49を接地しながら推進駆動装置20にて自走して台座15に載置した重量物11を移送するとともに、台座15に対する支持台16の回転角度を水平調整ジャッキ28により調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、推進機構付き無限軌道帯装置の無限軌道帯を自走台車として逆さにして使用して重量物を移送するようにした重量物の移送方法及び装置に関するものである。
【背景技術】
【0002】
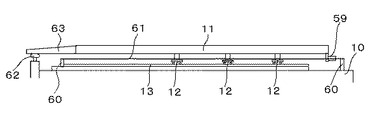
橋梁などの重量物11を製作ヤード10にて製作し、橋脚位置などに移送しようとする場合、従来は、図10に示すように、製作ヤード10を整備してレール13を敷設し、このレール13の上に複数台の台車12を載せ、この台車12の上にて重量物11を組み立て、2本の支柱60の間にワイヤプ61を張設し、ダブルツイン(登録商標)ジャッキなどの推進ジャッキ59で重量物11を移送し、重量物11の先端の手延べ機63を橋脚の上に設置した無限軌道帯スライド装置62の無限軌道帯へ送り込むようにした方法が採用されていた(特許文献1)。
【0003】
また、推進機構を有しない無限軌道帯スライド装置を無限軌道帯が接地するように逆さにして使用し、別に設けた推進ジャッキで移送する方法も知られている(特許文献2)。
【特許文献1】特公平3−36083号公報
【特許文献2】特開2000−351434号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に示す方法では、製作ヤード10の上にレール13を設置する必要がある。このレール13を現場で設置するには、多大の時間と費用を要するだけでなく、レール13を設置することでクローラクレーンなどの重機の移動や設置に制約が発生し、架設工事に支障をきたすという問題があった。
特許文献2に示す方法では、製作ヤード10の上にレール13を設置する必要はないが、別に設けた推進ジャッキで移送するために、移送方向が定まらず、移送方向がずれたときの方向修正が面倒であった。特に、無限軌道帯スライド装置の上面には、ゴム質の滑り止め材が設けられているため、重量物の方向を無理に修正しようとすると、無限軌道帯スライド装置が破損する恐れがあるという問題があった。また、特許文献2に示す方法では、製作ヤード10の上を展圧して平らにしても多少の凹凸が生じるので、円滑に移送することができない、という問題があった。
本発明は、推進機構付き無限軌道帯装置の無限軌道帯を自走台車として逆さに使用してレールなしで移送を可能にし、また、無限軌道帯にスライダを取り付けることにより方向修正を可能にした重量物の移送方法及び装置を提供することを目的とするものである。
【課題を解決するための手段】
【0005】
本発明は、複数個の軌道帯ユニット41を連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19の推進駆動装置20を受け台18に取り付け、この受け台18に複数個の鉛直調整ジャッキ17を介在して台座15を設け、この無限軌道帯19に推進駆動装置20を連結して推進機構付の無限軌道帯装置62を構成し、この推進機構付の無限軌道帯装置62を用い、前記無限軌道帯19を自走して台座15に載置した重量物11を移送するようにした重量物の移送方法である。
【0006】
単に逆さ使いをするだけでなく、外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19の推進駆動装置20を支持する受け台18を支持台16に取り付け、この支持台16に台座15を重ね合わせ、この支持台16と台座15の間を水平調整ジャッキ28にて連結して推進機構付の無限軌道帯スライド装置62を構成し、この推進機構付の無限軌道帯スライド装置62を使用し、前記無限軌道帯19のスライダ49を接地しながらこの無限軌道帯19を推進する推進駆動装置20にて自走して台座15に載置した重量物11を移送するとともに、台座15に対する支持台16の回転角度を水平調整ジャッキ28により調整するようにした重量物の移送方法である。
【発明の効果】
【0007】
請求項1記載の発明によれば、複数個の軌道帯ユニット41を連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19の推進駆動装置20を受け台18に取り付け、この受け台18に複数個の鉛直調整ジャッキ17を介在して台座15を設け、この無限軌道帯19に推進駆動装置20を連結して推進機構付の無限軌道帯装置62を構成し、この推進機構付の無限軌道帯装置62を用い、前記無限軌道帯19を自走して台座15に載置した重量物11を移送するようにしたので、レールを設置することなく地面を展圧し、その上に鉄板を敷設しただけのところを自走して重量物を移送でき、クローラクレーンなどの重機の移動や設置に制約がなく、架設工事を円滑に、かつ、効率よく行うことができる。また、鉄板の上や継ぎ目に多少の凹凸があっても複数個の鉛直調整ジャッキ17で高さを調整しながら走行することができる。
【0008】
請求項2記載の発明によれば、外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19の推進駆動装置20を支持する受け台18を支持台16に取り付け、この支持台16に台座15を重ね合わせ、この支持台16と台座15の間を水平調整ジャッキ28にて連結して推進機構付の無限軌道帯スライド装置62を構成し、この推進機構付の無限軌道帯スライド装置62を使用し、前記無限軌道帯19のスライダ49を接地しながらこの無限軌道帯19を推進する推進駆動装置20にて自走して台座15に載置した重量物11を移送するとともに、台座15に対する支持台16の回転角度を水平調整ジャッキ28により調整するようにしたので、移送方向や移送ラインにずれが生じても、重量物を載置したまま他のジャッキなどに盛り替えることなく修正をすることができる。
【0009】
請求項3記載の発明によれば、台座15に対する支持台16の単位回転角度は、軌道帯ユニット41を構成するスライダ受け板45のガイド軸52と、このガイド軸52が貫通するスライダ49のガイド孔51との隙間の許容範囲により設定するようにしたので、軌道帯ユニット41を無理に回転させることなく、確実に、かつ、装置に損傷を与えることなく角度調整ができる。
【0010】
請求項4記載の発明によれば、台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行うようにしたので、軌道帯ユニット41におけるスライダ49に無理がかからず、スムーズな角度調整ができる。
【0011】
請求項5記載の発明によれば、台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行い、この調整は、水平調整ジャッキ28の調整ストロークに達するまで繰り返し行うようにしたので、スライダ受け板45のガイド軸52とスライダ49のガイド孔51との隙間の許容範囲が小さくても複数回の角度調整で目的の角度まで円滑に調整できる。
【0012】
請求項6記載の発明によれば、台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行い、この調整は、右回転角度調整と左回転角度調整とを組み合わせて目的の移送ラインと移送方向に収束するようにしたので、直線的な移送のみならず、曲線的な移送、直線と曲線の混在した移送などどのような移送にも対処できる。
【0013】
請求項7記載の発明によれば、推進機構付の無限軌道帯スライド装置62と、この無限軌道帯スライド装置62の駆動油圧を発生する電動ポンプユニット33と、この電動ポンプユニット33を制御する制御ユニット36とを具備し、前記推進機構付の無限軌道帯スライド装置62は、外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19を駆動する推進駆動装置20とを支持する受け台18を支持台16に取り付け、この支持台16に台座15を重ねあわせ、この支持台16と台座15の間を、相互の回転角度を調整するための水平調整ジャッキ28にて連結して無限軌道帯スライド装置62を構成してなり、前記無限軌道帯19に臨ませてこの無限軌道帯19の移送距離を計測する移動量測定センサ32を設け、前記水平調整ジャッキ28に回転角度調整時のストロークを計測するストローク検出センサ31を設け、これらストローク検出センサ31と移動量測定センサ32を、それぞれの検出信号に基づき推進駆動装置20と水平調整ジャッキ28の制御信号を出力する制御ユニット36に接続したので、すでに知られている無限軌道帯スライド装置と推進機構とに、簡単な装置を付加することで角度調整可能な重量物の移送装置を安価に提供することができる。
【発明を実施するための最良の形態】
【0014】
本発明の移送方法は、外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19の推進駆動装置20を支持する受け台18を支持台16に取り付け、この支持台16に台座15を重ね合わせ、この支持台16と台座15の間を水平調整ジャッキ28にて連結して推進機構付の無限軌道帯スライド装置62を構成し、この推進機構付の無限軌道帯スライド装置62を使用し、前記無限軌道帯19のスライダ49を接地しながらこの無限軌道帯19を推進する推進駆動装置20にて自走して台座15に載置した重量物11を移送するとともに、台座15に対する支持台16の回転角度を水平調整ジャッキ28により調整する。
【0015】
台座15に対する支持台16の単位回転角度は、軌道帯ユニット41を構成するスライダ受け板45のガイド軸52と、このガイド軸52が貫通するスライダ49のガイド孔51との隙間の許容範囲により設定することが望ましい。
また、台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行うようにする。
台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行い、この調整は、水平調整ジャッキ28の調整ストロークに達するまで繰り返し行う。
さらに、台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行い、この調整は、右回転角度調整と左回転角度調整とを組み合わせて目的の移送ラインと移送方向に収束せしめる。
【0016】
本発明の装置は、推進機構付の無限軌道帯スライド装置62と、この無限軌道帯スライド装置62の駆動油圧を発生する電動ポンプユニット33と、この電動ポンプユニット33を制御する制御ユニット36とを具備し、前記推進機構付の無限軌道帯スライド装置62は、外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19を駆動する推進駆動装置20とを支持する受け台18を支持台16に取り付け、この支持台16に台座15を重ねあわせ、この支持台16と台座15の間を、相互の回転角度を調整するための水平調整ジャッキ28にて連結して無限軌道帯スライド装置62を構成してなり、前記無限軌道帯19に臨ませてこの無限軌道帯19の移送距離を計測する移動量測定センサ32を設け、前記水平調整ジャッキ28に回転角度調整時のストロークを計測するストローク検出センサ31を設け、これらストローク検出センサ31と移動量測定センサ32を、それぞれの検出信号に基づき推進駆動装置20と水平調整ジャッキ28の制御信号を出力する制御ユニット36に接続して構成する。
【実施例1】
【0017】
本発明の重量物の移送方法及び装置に使用される推進機構付き無限軌道帯スライド装置62は、本出願人が先に出願した特願2003−172890号のスライダ49を有する重量物の移送装置に、特願2003−393066号の推進機構を組み合わせて構成したものであって、本発明は、この推進機構付き無限軌道帯スライド装置62を逆さにして無限軌道帯19にて自走して重量物11を移送しようとする方法及び装置である。
【0018】
まず、本発明に使用される無限軌道帯スライド装置62の構成を図面に基づき説明する。
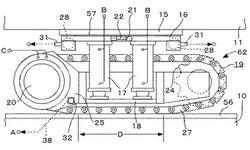
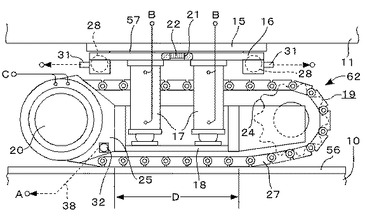
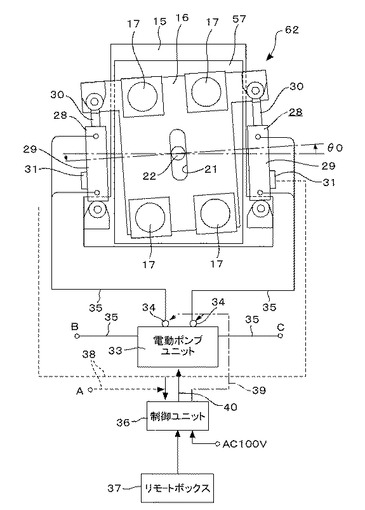
図1は、無限軌道帯スライド装置62の正面図、図2は、底面図である。
これらの図において、15は、これまでの一般的な使用方法では、橋脚の上端部や製作ヤード10の上に設置される台座であるが、本発明の無限軌道帯スライド装置62では、重量物11を載せるための台座15である。この台座15の下面には、滑りを良くするための滑り薄膜57を介して支持台16が重ねられ、この支持台16と台座15は、長孔21に回転軸22が嵌合している。
また、台座15と支持台16との間には、図4に示すように、左右に1個ずつ水平調整ジャッキ28が取り付けられている。この水平調整ジャッキ28を構成するシリンダ29の一端部が台座15に揺動自在に取り付けられ、水平調整ジャッキ28を構成するピストンロッド30の他端部が支持台16に揺動自在に取り付けられている。
この左右の水平調整ジャッキ28の伸縮動により、支持台16は、台座15に対して回転と移動が可能になっている。この左右の水平調整ジャッキ28には、伸縮するストロークを検出するストローク検出センサ31が取り付けられている。
【0019】
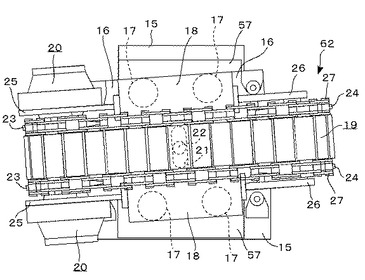
前記支持台16の下面には、4本の鉛直調整ジャッキ17が垂直に取り付けられ、この鉛直調整ジャッキ17の下端部が受け台18に取り付けられている。この受け台18には、左右に支持枠25と支持枠26が取り付けられ、これらの支持枠25と支持枠26に図示しない軸受けにより駆動軸と従動軸とが設けられ、駆動軸には、2個の駆動スプロケット23と推進駆動装置20が取り付けられ、従動軸には、2個の従動スプロケット24が取り付けられている。これらの駆動スプロケット23と従動スプロケット24には、無限軌道帯19のチェン27が掛け渡されている。前記支持枠25には、無限軌道帯19の近くにこの無限軌道帯19の移動量を検出する移動量測定センサ32が取り付けられている。
【0020】
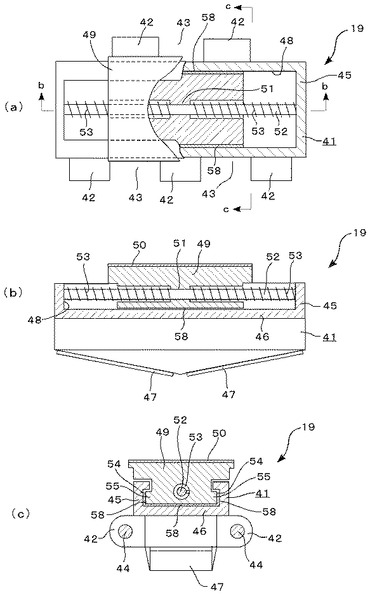
前記無限軌道帯19は、前記駆動スプロケット23と従動スプロケット24に掛け渡された2本のチェン27と、これらのチェン27の間に取り付けられた互いに連結された複数個の軌道帯ユニット41とで構成されている。この軌道帯ユニット41は、凹部48を有する細長のスライダ受け板45と、このスライダ受け板45内の凹部48を摺動するスライダ49を主体として構成されている。さらに詳しくは、スライダ49は、スライダ受け板45の凹部48内に一部が嵌合し、この嵌合しているスライダ49の中央には、ガイド孔51が穿設され、このガイド孔51にスライダ受け板45の凹部48内のガイド軸52が移動自在に貫通し、スライダ49は、無負荷時には左右の復帰ばね53によって凹部48の中央に位置している。また、凹部48内に嵌合しているスライダ49の側面の係合突部55が凹部48内の係合溝54に嵌合し、かつ、スライダ49の側面の係合突部55と凹部48内の底板46に接する面には、スライド滑り面58が取り付けられ、また、スライダ49の露出している面にはゴムなどの軟質面50が取り付けられている。
【0021】
スライダ受け板45における凹部48と反対面には、前記受け台18に接しながら摺動する摺動面47が設けられている。また、スライダ受け板45の一方の側面には、2個の筒部42が設けられ、他側面には、3個の筒部42が設けられ、この筒部42の間は、隣のスライダ受け板45の筒部42が嵌合し、かつ、連結ピン44が貫通し、この連結ピン44の両端部がチェン27の連結軸となる。
【0022】
図4において、前記水平調整ジャッキ28に接続された油圧ホース35は、圧力変換器34を介して電動ポンプユニット33に連結され、また、この電動ポンプユニット33には、油圧ホース35にて図1における鉛直調整ジャッキ17と推進駆動装置20に接続されている。この電動ポンプユニット33は制御ユニット36に制御用ケーブル40で接続され、この制御ユニット36には、リモートボックス37が接続されている。前記ストローク検出センサ31と移動量測定センサ32は、変位検出用ケーブル38により制御ユニット36に接続され、それぞれの検出信号が送られる。また、圧力変換器34と制御ユニット36の間は、圧力変換用ケーブル39で接続されている。
【0023】
以上のように構成された無限軌道帯スライド装置62を逆さ使いして重量物11を移送する作用を説明する。
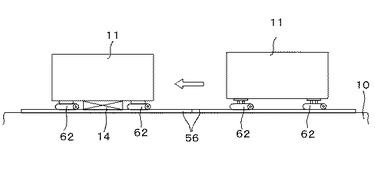
図9において、製作ヤード10の上に鉄板56を敷設し、この鉄板56の上で橋梁などの重量物11を組み立てる。無限軌道帯スライド装置62は、無限軌道帯19が直接鉄板56に接するように、すなわち、従来の使用方法とは異なる逆さ使いの状態とし、この複数台の無限軌道帯スライド装置62における台座15の上に重量物11を載せる。このとき、鉛直調整ジャッキ17を伸ばして重量物11の荷重を受け、かつ、台座15の上の鉛直反力を計測しながら推進駆動装置20を駆動して送り出す。このように、レール13を敷設することなく、直接鉄板56の上を走行して送り出すことができる。走行中に、鉄板56の上や継ぎ目に多少の凹凸があって台座15の上の重量物11が傾く恐れがあるときは、4本の鉛直調整ジャッキ17で水平に調整しながら移送する。
所定距離だけ移送したら、台座15の高さよりやや低い仮受け台14を用意し、鉛直調整ジャッキ17を下降することで重量物11は、仮受け台14の上に載置される。無限軌道帯スライド装置62は、そのまま自走して重量物11から外す。
なお、単に無限軌道帯スライド装置62を逆さ使いして重量物11を移送するだけの場合には、無限軌道帯スライド装置62は、スライダ49を有しない推進機構付の無限軌道帯装置62であってもよい。
【0024】
本発明は、無限軌道帯スライド装置62を逆さ使いすることでレール13なしで自走できることに特徴を有するが、本発明の無限軌道帯スライド装置62の最も重要な特徴は、逆さ使いし、かつ、無限軌道帯19にスライダ49を有することで、無限軌道帯スライド装置62に重量物11を載せたままで移送方向の修正ができることにある。
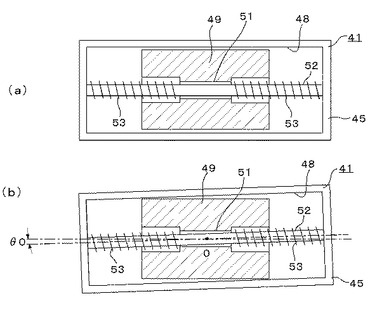
この方向修正の原理を図5(a)(b)に基づき説明する。
方向修正を可能にしているのは、無限軌道帯19におけるスライダ49が軌道帯ユニット41の凹部48内で左右に移動できることと、スライダ49は、凹部48内でわずかな捩れが許容されることである。図5(a)に示すように、このスライダ49には、ガイド孔51が穿設され、ガイド軸52が貫通している。このガイド孔51とガイド軸52との隙間は、無限軌道帯19が安定して駆動するために機構上できるだけ小さいことが望ましいが、スライダ49の移動が円滑に行われるためには、所定の隙間を必要とする。この隙間が大きすぎると無限軌道帯スライド装置62の移送が不安定になる恐れがあるからである。本実施例では、この隙間が0.58mmである。
この隙間0.58mmがあることで、スライダ49を固定して軌道帯ユニット41を捻ると、スライダ49の底面と凹部48内の底板46との接する面には、スライド滑り面58が取り付けられており、荷重を受けた状態でも本実施例では、θ0=3.3度の捩れが容易に発生する。これが1回の操作で修正可能な最大角度である。
なお、スライダ49の両側面と凹部48の内壁面との隙間もあるが、この部分には、スライド滑り面58が介在されているので、捩れに寄与するのは、主にガイド孔51とガイド軸52との隙間である。
【0025】
図1において、製作ヤード10を展圧し、その上に鉄板56を敷設し、その上に無限軌道帯19のスライダ49が接するように置き、台座15に重量物11を載せる。この重量物11の荷重は、無限軌道帯19における連結された複数の軌道帯ユニット41のうち、Dで示した6個の軌道帯ユニット41が鉄板56に接して受けているものとする。
ここで、無限軌道帯19による移送方向にずれが生じ、これを修正しようとするときには、制御ユニット36からの指令で電動ポンプユニット33から油圧ホース35を経て2個の水平調整ジャッキ28の伸縮動を制御する。例えば、図2及び4において、無限軌道帯19を図中左方向に修正しようとするときは、図4における右側の水平調整ジャッキ28を伸ばし、左側の水平調整ジャッキ28を縮ませるように制御する。このとき1回の操作で修正可能な単位回転角度は、前記θ0=3.3度である。この角度以上の修正を行うときには、無限軌道帯19を前記距離Dだけ移送させた後で前記同様の操作で繰り返し行う。
【0026】
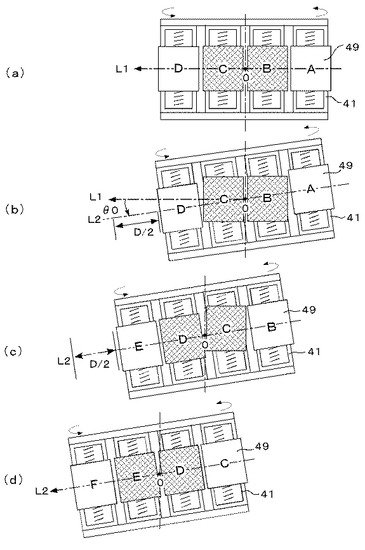
この方向修正動作のさらに詳細な説明を図7に基づき説明する。図1では、6個の軌道帯ユニット41のスライダ49が鉄板56に接しているが、説明を簡単にするため、図7では2個の軌道帯ユニット41のスライダ49が接地しているものとし、そのときの移送方向における接地距離をDとする。
図7(a)において、無限軌道帯スライド装置62の台座15に重量物11が載置されている状態では、スライダ49のうち、B、Cが接地して荷重を受け、A、Dが浮いているものとする。このときの移送方向をL1とする。この状態で中心点Oを支点として無限軌道帯19を所定角度だけ修正しようとするものとする。
【0027】
図7(b)において、支持台16に一体に取り付けられた無限軌道帯19は、前記同様2個の水平調整ジャッキ28を進退制御することにより許容範囲内の角度θ0(=3.3度)だけ回転する。この修正後の方向をL2とする。ここで、B、Cは、重量物11の荷重を受けているので、鉄板56に密接して回転できない。しかし、A、Dは、無負荷であるから無限軌道帯19と一体に回転する。この状態で無限軌道帯19をL2方向にまずD/2の距離だけ移送する。移送距離は、受け台18に取り付けた移動量測定センサ32にて検出し、その検出値を制御ユニット36に帰還して電動ポンプユニット33から推進駆動装置20への駆動を制御する。
【0028】
図7(c)は、図7(b)からL2方向にD/2の距離だけ移送した状態を示している。この状態では、C、Dが接地して荷重を受け、Bは、無負荷状態となるので、Bは、捩り状態から開放されて復帰ばね53により元の中間位置に戻る。この状態で無限軌道帯19をL2方向にさらにD/2の距離だけ移送する。
【0029】
図7(d)は、図7(c)からL2方向にさらにD/2の距離だけ移送した状態を示している。この状態では、D、Eが接地して荷重を受け、Cは、無負荷状態となるので、Cは、捩り状態から開放されて復帰ばね53により元の中間位置に戻る。
【0030】
図7(d)は、前記図7(a)と同様の状態なので、前記図7(a)〜図7(d)の操作をn回繰り返すことで、前記角度θ0(=3.3度)×n度の回転修正ができる。ただし、この回転は、水平調整ジャッキ28のストローク量により制限される。本実施例では、水平調整ジャッキ28のストローク量を100mmとすると、4回繰り返すことで±13度の範囲内で回転可能なように構成されている。しかし、これに限られるものではない。
また、回転角度が前記角度θ0(=±3.3度)の整数倍以外の微細な角度の調整をするときには、目的の角度となるように水平調整ジャッキ28に取り付けたストローク検出センサ31でストロークを検出し、電動ポンプユニット33から油圧ホース35を介してストロークを制御すればよい。
【実施例2】
【0031】
図7に示した例では、左(+)方向に1ないし複数回修正する場合としたが、左(+)方向と右(−)方向を混在して修正することもできる。
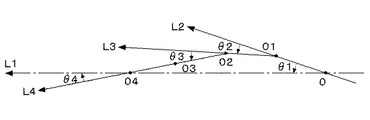
例えば、図6において、本来の移送方向と移送ラインがL1であるにも拘らず、L1に対してθ1の角度ずれを有するL2の方向に移送している場合において、これをL1の上に戻すには、まず、O1点で左(+)方向にθ2だけ修正し、さらにO2点で左(+)方向にθ3だけ修正し、O3点をそのまま通り越してO4点で右(−)方向にθ4だけ修正し、L1の上に一致させる。
この場合において、θ2、θ3、θ4は、前記許容範囲内の角度θ0(=±3.3度)以上である場合には、複数回の修正を繰り返す必要がある。この図6に示すように、左(+)方向と右(−)方向の修正を繰り返すことで目的の方向とラインL1に収束させることができる。
【実施例3】
【0032】
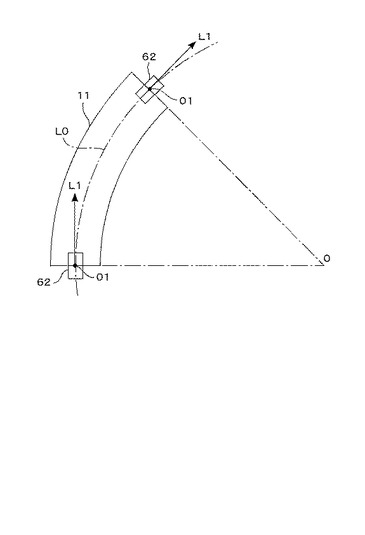
前記実施例では、重量物11を直線的に移送する場合の方向修正について説明したが、図8に示すような湾曲した重量物11を曲線方向L0に移送するような場合の方向修正も可能である。
さらに詳しくは、湾曲した重量物11の先端部と後端部に本発明の無限軌道帯スライド装置62を配置する。それぞれの無限軌道帯スライド装置62、62がそれぞれのO1点、O1点において接線方向L1、L1に向いていれば、重量物11は、曲線方向L0に移送するはずであるが、もしどちらかの無限軌道帯スライド装置62が曲線方向L0から外れたときは、前記図6又は図7にて説明した方法で方向を修正して曲線方向L0に一致させることができる。
【図面の簡単な説明】
【0033】
【図1】本発明の重量物の移送方法及び装置に用いられる無限軌道帯スライド装置62の正面図である。
【図2】図1における底面図である。
【図3】(a)は、軌道帯ユニット41の一部切り欠いた平面図、(b)は、b−b線断面図、(c)は、c−c線断面図である。
【図4】図1における無限軌道帯19と推進駆動装置20を省略した底面図と制御ブロック図である。
【図5】(a)は、回転角度調整前のスライダ49の一部切り欠いた平面図、(b)は、回転角度調整後のスライダ49の一部切り欠いた平面図である。
【図6】回転角度調整により目的のラインと方向に収束する作用の説明図である。
【図7】回転角度調整作用の説明図で、(a)は、調整前の底面図、(b)は、回転角調整後の底面図、(c)は、D/2移動後の底面図、(d)は、さらにD/2移動後の底面図である。
【図8】本発明による重量物の移送方法及び装置の他の実施例の説明図である。
【図9】本発明による重量物の移送方法及び装置の説明図である。
【図10】従来の重量物の移送方法及び装置の説明図である。
【符号の説明】
【0034】
10…製作ヤード、11…重量物、12…台車、13…レール、14…仮受け台、15…台座、16…支持台、17…鉛直調整ジャッキ、18…受け台、19…無限軌道帯、20…推進駆動装置、21…長孔、22…回転軸、23…駆動スプロケット、24…従動スプロケット、25…支持枠、26…支持枠、27…チェン、28…水平調整ジャッキ、29…シリンダ、30…ピストンロッド、31…ストローク検出センサ、32…移動量測定センサ、33…電動ポンプユニット、34…圧力変換器、35…油圧ホース、36…制御ユニット、37…リモートボックス、38…変位検出用ケーブル、39…圧力変換用ケーブル、40…制御用ケーブル、41…軌道帯ユニット、42…筒部、43…嵌合凹部、44…連結ピン、45…スライダ受け板、46…底板、47…摺動面、48…凹部、49…スライダ、50…軟質面、51…ガイド孔、52…ガイド軸、53…復帰ばね、54…係合溝、55…係合突部、56…鉄板、57…滑り薄膜、58…スライド滑り面、59…推進ジャッキ、60…支柱、61…ワイヤロープ、62…無限軌道帯スライド装置、63…手延べ機。
【技術分野】
【0001】
本発明は、推進機構付き無限軌道帯装置の無限軌道帯を自走台車として逆さにして使用して重量物を移送するようにした重量物の移送方法及び装置に関するものである。
【背景技術】
【0002】
橋梁などの重量物11を製作ヤード10にて製作し、橋脚位置などに移送しようとする場合、従来は、図10に示すように、製作ヤード10を整備してレール13を敷設し、このレール13の上に複数台の台車12を載せ、この台車12の上にて重量物11を組み立て、2本の支柱60の間にワイヤプ61を張設し、ダブルツイン(登録商標)ジャッキなどの推進ジャッキ59で重量物11を移送し、重量物11の先端の手延べ機63を橋脚の上に設置した無限軌道帯スライド装置62の無限軌道帯へ送り込むようにした方法が採用されていた(特許文献1)。
【0003】
また、推進機構を有しない無限軌道帯スライド装置を無限軌道帯が接地するように逆さにして使用し、別に設けた推進ジャッキで移送する方法も知られている(特許文献2)。
【特許文献1】特公平3−36083号公報
【特許文献2】特開2000−351434号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に示す方法では、製作ヤード10の上にレール13を設置する必要がある。このレール13を現場で設置するには、多大の時間と費用を要するだけでなく、レール13を設置することでクローラクレーンなどの重機の移動や設置に制約が発生し、架設工事に支障をきたすという問題があった。
特許文献2に示す方法では、製作ヤード10の上にレール13を設置する必要はないが、別に設けた推進ジャッキで移送するために、移送方向が定まらず、移送方向がずれたときの方向修正が面倒であった。特に、無限軌道帯スライド装置の上面には、ゴム質の滑り止め材が設けられているため、重量物の方向を無理に修正しようとすると、無限軌道帯スライド装置が破損する恐れがあるという問題があった。また、特許文献2に示す方法では、製作ヤード10の上を展圧して平らにしても多少の凹凸が生じるので、円滑に移送することができない、という問題があった。
本発明は、推進機構付き無限軌道帯装置の無限軌道帯を自走台車として逆さに使用してレールなしで移送を可能にし、また、無限軌道帯にスライダを取り付けることにより方向修正を可能にした重量物の移送方法及び装置を提供することを目的とするものである。
【課題を解決するための手段】
【0005】
本発明は、複数個の軌道帯ユニット41を連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19の推進駆動装置20を受け台18に取り付け、この受け台18に複数個の鉛直調整ジャッキ17を介在して台座15を設け、この無限軌道帯19に推進駆動装置20を連結して推進機構付の無限軌道帯装置62を構成し、この推進機構付の無限軌道帯装置62を用い、前記無限軌道帯19を自走して台座15に載置した重量物11を移送するようにした重量物の移送方法である。
【0006】
単に逆さ使いをするだけでなく、外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19の推進駆動装置20を支持する受け台18を支持台16に取り付け、この支持台16に台座15を重ね合わせ、この支持台16と台座15の間を水平調整ジャッキ28にて連結して推進機構付の無限軌道帯スライド装置62を構成し、この推進機構付の無限軌道帯スライド装置62を使用し、前記無限軌道帯19のスライダ49を接地しながらこの無限軌道帯19を推進する推進駆動装置20にて自走して台座15に載置した重量物11を移送するとともに、台座15に対する支持台16の回転角度を水平調整ジャッキ28により調整するようにした重量物の移送方法である。
【発明の効果】
【0007】
請求項1記載の発明によれば、複数個の軌道帯ユニット41を連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19の推進駆動装置20を受け台18に取り付け、この受け台18に複数個の鉛直調整ジャッキ17を介在して台座15を設け、この無限軌道帯19に推進駆動装置20を連結して推進機構付の無限軌道帯装置62を構成し、この推進機構付の無限軌道帯装置62を用い、前記無限軌道帯19を自走して台座15に載置した重量物11を移送するようにしたので、レールを設置することなく地面を展圧し、その上に鉄板を敷設しただけのところを自走して重量物を移送でき、クローラクレーンなどの重機の移動や設置に制約がなく、架設工事を円滑に、かつ、効率よく行うことができる。また、鉄板の上や継ぎ目に多少の凹凸があっても複数個の鉛直調整ジャッキ17で高さを調整しながら走行することができる。
【0008】
請求項2記載の発明によれば、外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19の推進駆動装置20を支持する受け台18を支持台16に取り付け、この支持台16に台座15を重ね合わせ、この支持台16と台座15の間を水平調整ジャッキ28にて連結して推進機構付の無限軌道帯スライド装置62を構成し、この推進機構付の無限軌道帯スライド装置62を使用し、前記無限軌道帯19のスライダ49を接地しながらこの無限軌道帯19を推進する推進駆動装置20にて自走して台座15に載置した重量物11を移送するとともに、台座15に対する支持台16の回転角度を水平調整ジャッキ28により調整するようにしたので、移送方向や移送ラインにずれが生じても、重量物を載置したまま他のジャッキなどに盛り替えることなく修正をすることができる。
【0009】
請求項3記載の発明によれば、台座15に対する支持台16の単位回転角度は、軌道帯ユニット41を構成するスライダ受け板45のガイド軸52と、このガイド軸52が貫通するスライダ49のガイド孔51との隙間の許容範囲により設定するようにしたので、軌道帯ユニット41を無理に回転させることなく、確実に、かつ、装置に損傷を与えることなく角度調整ができる。
【0010】
請求項4記載の発明によれば、台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行うようにしたので、軌道帯ユニット41におけるスライダ49に無理がかからず、スムーズな角度調整ができる。
【0011】
請求項5記載の発明によれば、台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行い、この調整は、水平調整ジャッキ28の調整ストロークに達するまで繰り返し行うようにしたので、スライダ受け板45のガイド軸52とスライダ49のガイド孔51との隙間の許容範囲が小さくても複数回の角度調整で目的の角度まで円滑に調整できる。
【0012】
請求項6記載の発明によれば、台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行い、この調整は、右回転角度調整と左回転角度調整とを組み合わせて目的の移送ラインと移送方向に収束するようにしたので、直線的な移送のみならず、曲線的な移送、直線と曲線の混在した移送などどのような移送にも対処できる。
【0013】
請求項7記載の発明によれば、推進機構付の無限軌道帯スライド装置62と、この無限軌道帯スライド装置62の駆動油圧を発生する電動ポンプユニット33と、この電動ポンプユニット33を制御する制御ユニット36とを具備し、前記推進機構付の無限軌道帯スライド装置62は、外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19を駆動する推進駆動装置20とを支持する受け台18を支持台16に取り付け、この支持台16に台座15を重ねあわせ、この支持台16と台座15の間を、相互の回転角度を調整するための水平調整ジャッキ28にて連結して無限軌道帯スライド装置62を構成してなり、前記無限軌道帯19に臨ませてこの無限軌道帯19の移送距離を計測する移動量測定センサ32を設け、前記水平調整ジャッキ28に回転角度調整時のストロークを計測するストローク検出センサ31を設け、これらストローク検出センサ31と移動量測定センサ32を、それぞれの検出信号に基づき推進駆動装置20と水平調整ジャッキ28の制御信号を出力する制御ユニット36に接続したので、すでに知られている無限軌道帯スライド装置と推進機構とに、簡単な装置を付加することで角度調整可能な重量物の移送装置を安価に提供することができる。
【発明を実施するための最良の形態】
【0014】
本発明の移送方法は、外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19の推進駆動装置20を支持する受け台18を支持台16に取り付け、この支持台16に台座15を重ね合わせ、この支持台16と台座15の間を水平調整ジャッキ28にて連結して推進機構付の無限軌道帯スライド装置62を構成し、この推進機構付の無限軌道帯スライド装置62を使用し、前記無限軌道帯19のスライダ49を接地しながらこの無限軌道帯19を推進する推進駆動装置20にて自走して台座15に載置した重量物11を移送するとともに、台座15に対する支持台16の回転角度を水平調整ジャッキ28により調整する。
【0015】
台座15に対する支持台16の単位回転角度は、軌道帯ユニット41を構成するスライダ受け板45のガイド軸52と、このガイド軸52が貫通するスライダ49のガイド孔51との隙間の許容範囲により設定することが望ましい。
また、台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行うようにする。
台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行い、この調整は、水平調整ジャッキ28の調整ストロークに達するまで繰り返し行う。
さらに、台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行い、この調整は、右回転角度調整と左回転角度調整とを組み合わせて目的の移送ラインと移送方向に収束せしめる。
【0016】
本発明の装置は、推進機構付の無限軌道帯スライド装置62と、この無限軌道帯スライド装置62の駆動油圧を発生する電動ポンプユニット33と、この電動ポンプユニット33を制御する制御ユニット36とを具備し、前記推進機構付の無限軌道帯スライド装置62は、外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19を駆動する推進駆動装置20とを支持する受け台18を支持台16に取り付け、この支持台16に台座15を重ねあわせ、この支持台16と台座15の間を、相互の回転角度を調整するための水平調整ジャッキ28にて連結して無限軌道帯スライド装置62を構成してなり、前記無限軌道帯19に臨ませてこの無限軌道帯19の移送距離を計測する移動量測定センサ32を設け、前記水平調整ジャッキ28に回転角度調整時のストロークを計測するストローク検出センサ31を設け、これらストローク検出センサ31と移動量測定センサ32を、それぞれの検出信号に基づき推進駆動装置20と水平調整ジャッキ28の制御信号を出力する制御ユニット36に接続して構成する。
【実施例1】
【0017】
本発明の重量物の移送方法及び装置に使用される推進機構付き無限軌道帯スライド装置62は、本出願人が先に出願した特願2003−172890号のスライダ49を有する重量物の移送装置に、特願2003−393066号の推進機構を組み合わせて構成したものであって、本発明は、この推進機構付き無限軌道帯スライド装置62を逆さにして無限軌道帯19にて自走して重量物11を移送しようとする方法及び装置である。
【0018】
まず、本発明に使用される無限軌道帯スライド装置62の構成を図面に基づき説明する。
図1は、無限軌道帯スライド装置62の正面図、図2は、底面図である。
これらの図において、15は、これまでの一般的な使用方法では、橋脚の上端部や製作ヤード10の上に設置される台座であるが、本発明の無限軌道帯スライド装置62では、重量物11を載せるための台座15である。この台座15の下面には、滑りを良くするための滑り薄膜57を介して支持台16が重ねられ、この支持台16と台座15は、長孔21に回転軸22が嵌合している。
また、台座15と支持台16との間には、図4に示すように、左右に1個ずつ水平調整ジャッキ28が取り付けられている。この水平調整ジャッキ28を構成するシリンダ29の一端部が台座15に揺動自在に取り付けられ、水平調整ジャッキ28を構成するピストンロッド30の他端部が支持台16に揺動自在に取り付けられている。
この左右の水平調整ジャッキ28の伸縮動により、支持台16は、台座15に対して回転と移動が可能になっている。この左右の水平調整ジャッキ28には、伸縮するストロークを検出するストローク検出センサ31が取り付けられている。
【0019】
前記支持台16の下面には、4本の鉛直調整ジャッキ17が垂直に取り付けられ、この鉛直調整ジャッキ17の下端部が受け台18に取り付けられている。この受け台18には、左右に支持枠25と支持枠26が取り付けられ、これらの支持枠25と支持枠26に図示しない軸受けにより駆動軸と従動軸とが設けられ、駆動軸には、2個の駆動スプロケット23と推進駆動装置20が取り付けられ、従動軸には、2個の従動スプロケット24が取り付けられている。これらの駆動スプロケット23と従動スプロケット24には、無限軌道帯19のチェン27が掛け渡されている。前記支持枠25には、無限軌道帯19の近くにこの無限軌道帯19の移動量を検出する移動量測定センサ32が取り付けられている。
【0020】
前記無限軌道帯19は、前記駆動スプロケット23と従動スプロケット24に掛け渡された2本のチェン27と、これらのチェン27の間に取り付けられた互いに連結された複数個の軌道帯ユニット41とで構成されている。この軌道帯ユニット41は、凹部48を有する細長のスライダ受け板45と、このスライダ受け板45内の凹部48を摺動するスライダ49を主体として構成されている。さらに詳しくは、スライダ49は、スライダ受け板45の凹部48内に一部が嵌合し、この嵌合しているスライダ49の中央には、ガイド孔51が穿設され、このガイド孔51にスライダ受け板45の凹部48内のガイド軸52が移動自在に貫通し、スライダ49は、無負荷時には左右の復帰ばね53によって凹部48の中央に位置している。また、凹部48内に嵌合しているスライダ49の側面の係合突部55が凹部48内の係合溝54に嵌合し、かつ、スライダ49の側面の係合突部55と凹部48内の底板46に接する面には、スライド滑り面58が取り付けられ、また、スライダ49の露出している面にはゴムなどの軟質面50が取り付けられている。
【0021】
スライダ受け板45における凹部48と反対面には、前記受け台18に接しながら摺動する摺動面47が設けられている。また、スライダ受け板45の一方の側面には、2個の筒部42が設けられ、他側面には、3個の筒部42が設けられ、この筒部42の間は、隣のスライダ受け板45の筒部42が嵌合し、かつ、連結ピン44が貫通し、この連結ピン44の両端部がチェン27の連結軸となる。
【0022】
図4において、前記水平調整ジャッキ28に接続された油圧ホース35は、圧力変換器34を介して電動ポンプユニット33に連結され、また、この電動ポンプユニット33には、油圧ホース35にて図1における鉛直調整ジャッキ17と推進駆動装置20に接続されている。この電動ポンプユニット33は制御ユニット36に制御用ケーブル40で接続され、この制御ユニット36には、リモートボックス37が接続されている。前記ストローク検出センサ31と移動量測定センサ32は、変位検出用ケーブル38により制御ユニット36に接続され、それぞれの検出信号が送られる。また、圧力変換器34と制御ユニット36の間は、圧力変換用ケーブル39で接続されている。
【0023】
以上のように構成された無限軌道帯スライド装置62を逆さ使いして重量物11を移送する作用を説明する。
図9において、製作ヤード10の上に鉄板56を敷設し、この鉄板56の上で橋梁などの重量物11を組み立てる。無限軌道帯スライド装置62は、無限軌道帯19が直接鉄板56に接するように、すなわち、従来の使用方法とは異なる逆さ使いの状態とし、この複数台の無限軌道帯スライド装置62における台座15の上に重量物11を載せる。このとき、鉛直調整ジャッキ17を伸ばして重量物11の荷重を受け、かつ、台座15の上の鉛直反力を計測しながら推進駆動装置20を駆動して送り出す。このように、レール13を敷設することなく、直接鉄板56の上を走行して送り出すことができる。走行中に、鉄板56の上や継ぎ目に多少の凹凸があって台座15の上の重量物11が傾く恐れがあるときは、4本の鉛直調整ジャッキ17で水平に調整しながら移送する。
所定距離だけ移送したら、台座15の高さよりやや低い仮受け台14を用意し、鉛直調整ジャッキ17を下降することで重量物11は、仮受け台14の上に載置される。無限軌道帯スライド装置62は、そのまま自走して重量物11から外す。
なお、単に無限軌道帯スライド装置62を逆さ使いして重量物11を移送するだけの場合には、無限軌道帯スライド装置62は、スライダ49を有しない推進機構付の無限軌道帯装置62であってもよい。
【0024】
本発明は、無限軌道帯スライド装置62を逆さ使いすることでレール13なしで自走できることに特徴を有するが、本発明の無限軌道帯スライド装置62の最も重要な特徴は、逆さ使いし、かつ、無限軌道帯19にスライダ49を有することで、無限軌道帯スライド装置62に重量物11を載せたままで移送方向の修正ができることにある。
この方向修正の原理を図5(a)(b)に基づき説明する。
方向修正を可能にしているのは、無限軌道帯19におけるスライダ49が軌道帯ユニット41の凹部48内で左右に移動できることと、スライダ49は、凹部48内でわずかな捩れが許容されることである。図5(a)に示すように、このスライダ49には、ガイド孔51が穿設され、ガイド軸52が貫通している。このガイド孔51とガイド軸52との隙間は、無限軌道帯19が安定して駆動するために機構上できるだけ小さいことが望ましいが、スライダ49の移動が円滑に行われるためには、所定の隙間を必要とする。この隙間が大きすぎると無限軌道帯スライド装置62の移送が不安定になる恐れがあるからである。本実施例では、この隙間が0.58mmである。
この隙間0.58mmがあることで、スライダ49を固定して軌道帯ユニット41を捻ると、スライダ49の底面と凹部48内の底板46との接する面には、スライド滑り面58が取り付けられており、荷重を受けた状態でも本実施例では、θ0=3.3度の捩れが容易に発生する。これが1回の操作で修正可能な最大角度である。
なお、スライダ49の両側面と凹部48の内壁面との隙間もあるが、この部分には、スライド滑り面58が介在されているので、捩れに寄与するのは、主にガイド孔51とガイド軸52との隙間である。
【0025】
図1において、製作ヤード10を展圧し、その上に鉄板56を敷設し、その上に無限軌道帯19のスライダ49が接するように置き、台座15に重量物11を載せる。この重量物11の荷重は、無限軌道帯19における連結された複数の軌道帯ユニット41のうち、Dで示した6個の軌道帯ユニット41が鉄板56に接して受けているものとする。
ここで、無限軌道帯19による移送方向にずれが生じ、これを修正しようとするときには、制御ユニット36からの指令で電動ポンプユニット33から油圧ホース35を経て2個の水平調整ジャッキ28の伸縮動を制御する。例えば、図2及び4において、無限軌道帯19を図中左方向に修正しようとするときは、図4における右側の水平調整ジャッキ28を伸ばし、左側の水平調整ジャッキ28を縮ませるように制御する。このとき1回の操作で修正可能な単位回転角度は、前記θ0=3.3度である。この角度以上の修正を行うときには、無限軌道帯19を前記距離Dだけ移送させた後で前記同様の操作で繰り返し行う。
【0026】
この方向修正動作のさらに詳細な説明を図7に基づき説明する。図1では、6個の軌道帯ユニット41のスライダ49が鉄板56に接しているが、説明を簡単にするため、図7では2個の軌道帯ユニット41のスライダ49が接地しているものとし、そのときの移送方向における接地距離をDとする。
図7(a)において、無限軌道帯スライド装置62の台座15に重量物11が載置されている状態では、スライダ49のうち、B、Cが接地して荷重を受け、A、Dが浮いているものとする。このときの移送方向をL1とする。この状態で中心点Oを支点として無限軌道帯19を所定角度だけ修正しようとするものとする。
【0027】
図7(b)において、支持台16に一体に取り付けられた無限軌道帯19は、前記同様2個の水平調整ジャッキ28を進退制御することにより許容範囲内の角度θ0(=3.3度)だけ回転する。この修正後の方向をL2とする。ここで、B、Cは、重量物11の荷重を受けているので、鉄板56に密接して回転できない。しかし、A、Dは、無負荷であるから無限軌道帯19と一体に回転する。この状態で無限軌道帯19をL2方向にまずD/2の距離だけ移送する。移送距離は、受け台18に取り付けた移動量測定センサ32にて検出し、その検出値を制御ユニット36に帰還して電動ポンプユニット33から推進駆動装置20への駆動を制御する。
【0028】
図7(c)は、図7(b)からL2方向にD/2の距離だけ移送した状態を示している。この状態では、C、Dが接地して荷重を受け、Bは、無負荷状態となるので、Bは、捩り状態から開放されて復帰ばね53により元の中間位置に戻る。この状態で無限軌道帯19をL2方向にさらにD/2の距離だけ移送する。
【0029】
図7(d)は、図7(c)からL2方向にさらにD/2の距離だけ移送した状態を示している。この状態では、D、Eが接地して荷重を受け、Cは、無負荷状態となるので、Cは、捩り状態から開放されて復帰ばね53により元の中間位置に戻る。
【0030】
図7(d)は、前記図7(a)と同様の状態なので、前記図7(a)〜図7(d)の操作をn回繰り返すことで、前記角度θ0(=3.3度)×n度の回転修正ができる。ただし、この回転は、水平調整ジャッキ28のストローク量により制限される。本実施例では、水平調整ジャッキ28のストローク量を100mmとすると、4回繰り返すことで±13度の範囲内で回転可能なように構成されている。しかし、これに限られるものではない。
また、回転角度が前記角度θ0(=±3.3度)の整数倍以外の微細な角度の調整をするときには、目的の角度となるように水平調整ジャッキ28に取り付けたストローク検出センサ31でストロークを検出し、電動ポンプユニット33から油圧ホース35を介してストロークを制御すればよい。
【実施例2】
【0031】
図7に示した例では、左(+)方向に1ないし複数回修正する場合としたが、左(+)方向と右(−)方向を混在して修正することもできる。
例えば、図6において、本来の移送方向と移送ラインがL1であるにも拘らず、L1に対してθ1の角度ずれを有するL2の方向に移送している場合において、これをL1の上に戻すには、まず、O1点で左(+)方向にθ2だけ修正し、さらにO2点で左(+)方向にθ3だけ修正し、O3点をそのまま通り越してO4点で右(−)方向にθ4だけ修正し、L1の上に一致させる。
この場合において、θ2、θ3、θ4は、前記許容範囲内の角度θ0(=±3.3度)以上である場合には、複数回の修正を繰り返す必要がある。この図6に示すように、左(+)方向と右(−)方向の修正を繰り返すことで目的の方向とラインL1に収束させることができる。
【実施例3】
【0032】
前記実施例では、重量物11を直線的に移送する場合の方向修正について説明したが、図8に示すような湾曲した重量物11を曲線方向L0に移送するような場合の方向修正も可能である。
さらに詳しくは、湾曲した重量物11の先端部と後端部に本発明の無限軌道帯スライド装置62を配置する。それぞれの無限軌道帯スライド装置62、62がそれぞれのO1点、O1点において接線方向L1、L1に向いていれば、重量物11は、曲線方向L0に移送するはずであるが、もしどちらかの無限軌道帯スライド装置62が曲線方向L0から外れたときは、前記図6又は図7にて説明した方法で方向を修正して曲線方向L0に一致させることができる。
【図面の簡単な説明】
【0033】
【図1】本発明の重量物の移送方法及び装置に用いられる無限軌道帯スライド装置62の正面図である。
【図2】図1における底面図である。
【図3】(a)は、軌道帯ユニット41の一部切り欠いた平面図、(b)は、b−b線断面図、(c)は、c−c線断面図である。
【図4】図1における無限軌道帯19と推進駆動装置20を省略した底面図と制御ブロック図である。
【図5】(a)は、回転角度調整前のスライダ49の一部切り欠いた平面図、(b)は、回転角度調整後のスライダ49の一部切り欠いた平面図である。
【図6】回転角度調整により目的のラインと方向に収束する作用の説明図である。
【図7】回転角度調整作用の説明図で、(a)は、調整前の底面図、(b)は、回転角調整後の底面図、(c)は、D/2移動後の底面図、(d)は、さらにD/2移動後の底面図である。
【図8】本発明による重量物の移送方法及び装置の他の実施例の説明図である。
【図9】本発明による重量物の移送方法及び装置の説明図である。
【図10】従来の重量物の移送方法及び装置の説明図である。
【符号の説明】
【0034】
10…製作ヤード、11…重量物、12…台車、13…レール、14…仮受け台、15…台座、16…支持台、17…鉛直調整ジャッキ、18…受け台、19…無限軌道帯、20…推進駆動装置、21…長孔、22…回転軸、23…駆動スプロケット、24…従動スプロケット、25…支持枠、26…支持枠、27…チェン、28…水平調整ジャッキ、29…シリンダ、30…ピストンロッド、31…ストローク検出センサ、32…移動量測定センサ、33…電動ポンプユニット、34…圧力変換器、35…油圧ホース、36…制御ユニット、37…リモートボックス、38…変位検出用ケーブル、39…圧力変換用ケーブル、40…制御用ケーブル、41…軌道帯ユニット、42…筒部、43…嵌合凹部、44…連結ピン、45…スライダ受け板、46…底板、47…摺動面、48…凹部、49…スライダ、50…軟質面、51…ガイド孔、52…ガイド軸、53…復帰ばね、54…係合溝、55…係合突部、56…鉄板、57…滑り薄膜、58…スライド滑り面、59…推進ジャッキ、60…支柱、61…ワイヤロープ、62…無限軌道帯スライド装置、63…手延べ機。
【特許請求の範囲】
【請求項1】
複数個の軌道帯ユニット41を連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19の推進駆動装置20を受け台18に取り付け、この受け台18に複数個の鉛直調整ジャッキ17を介在して台座15を設け、この無限軌道帯19に推進駆動装置20を連結して推進機構付の無限軌道帯装置62を構成し、この推進機構付の無限軌道帯装置62を用い、前記無限軌道帯19を自走して台座15に載置した重量物11を移送するようにしたことを特徴とする重量物の移送方法。
【請求項2】
外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19の推進駆動装置20を支持する受け台18を支持台16に取り付け、この支持台16に台座15を重ね合わせ、この支持台16と台座15の間を水平調整ジャッキ28にて連結して推進機構付の無限軌道帯スライド装置62を構成し、この推進機構付の無限軌道帯スライド装置62を使用し、前記無限軌道帯19のスライダ49を接地しながらこの無限軌道帯19を推進する推進駆動装置20にて自走して台座15に載置した重量物11を移送するとともに、台座15に対する支持台16の回転角度を水平調整ジャッキ28により調整するようにしたことを特徴とする重量物の移送方法。
【請求項3】
台座15に対する支持台16の単位回転角度は、軌道帯ユニット41を構成するスライダ受け板45のガイド軸52と、このガイド軸52が貫通するスライダ49のガイド孔51との隙間の許容範囲により設定するようにしたことを特徴とする請求項2記載の重量物の移送方法。
【請求項4】
台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行うようにしたことを特徴とする請求項2記載の重量物の移送方法。
【請求項5】
台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行い、この調整は、水平調整ジャッキ28の調整ストロークに達するまで繰り返し行うようにしたことを特徴とする請求項2記載の重量物の移送方法。
【請求項6】
台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行い、この調整は、右回転角度調整と左回転角度調整とを組み合わせて目的の移送ラインと移送方向に収束するようにしたことを特徴とする請求項2記載の重量物の移送方法。
【請求項7】
推進機構付の無限軌道帯スライド装置62と、この無限軌道帯スライド装置62の駆動油圧を発生する電動ポンプユニット33と、この電動ポンプユニット33を制御する制御ユニット36とを具備し、前記推進機構付の無限軌道帯スライド装置62は、外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19を駆動する推進駆動装置20とを支持する受け台18を支持台16に取り付け、この支持台16に台座15を重ねあわせ、この支持台16と台座15の間を、相互の回転角度を調整するための水平調整ジャッキ28にて連結して無限軌道帯スライド装置62を構成してなり、前記無限軌道帯19に臨ませてこの無限軌道帯19の移送距離を計測する移動量測定センサ32を設け、前記水平調整ジャッキ28に回転角度調整時のストロークを計測するストローク検出センサ31を設け、これらストローク検出センサ31と移動量測定センサ32を、それぞれの検出信号に基づき推進駆動装置20と水平調整ジャッキ28の制御信号を出力する制御ユニット36に接続したことを特徴とする重量物の移送装置。
【請求項1】
複数個の軌道帯ユニット41を連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19の推進駆動装置20を受け台18に取り付け、この受け台18に複数個の鉛直調整ジャッキ17を介在して台座15を設け、この無限軌道帯19に推進駆動装置20を連結して推進機構付の無限軌道帯装置62を構成し、この推進機構付の無限軌道帯装置62を用い、前記無限軌道帯19を自走して台座15に載置した重量物11を移送するようにしたことを特徴とする重量物の移送方法。
【請求項2】
外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19の推進駆動装置20を支持する受け台18を支持台16に取り付け、この支持台16に台座15を重ね合わせ、この支持台16と台座15の間を水平調整ジャッキ28にて連結して推進機構付の無限軌道帯スライド装置62を構成し、この推進機構付の無限軌道帯スライド装置62を使用し、前記無限軌道帯19のスライダ49を接地しながらこの無限軌道帯19を推進する推進駆動装置20にて自走して台座15に載置した重量物11を移送するとともに、台座15に対する支持台16の回転角度を水平調整ジャッキ28により調整するようにしたことを特徴とする重量物の移送方法。
【請求項3】
台座15に対する支持台16の単位回転角度は、軌道帯ユニット41を構成するスライダ受け板45のガイド軸52と、このガイド軸52が貫通するスライダ49のガイド孔51との隙間の許容範囲により設定するようにしたことを特徴とする請求項2記載の重量物の移送方法。
【請求項4】
台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行うようにしたことを特徴とする請求項2記載の重量物の移送方法。
【請求項5】
台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行い、この調整は、水平調整ジャッキ28の調整ストロークに達するまで繰り返し行うようにしたことを特徴とする請求項2記載の重量物の移送方法。
【請求項6】
台座15に対する支持台16の2回目の回転角度調整は、1回目の回転角度調整時に接地しているスライダ49がすべて無負荷になる位置まで移送した後に行い、この調整は、右回転角度調整と左回転角度調整とを組み合わせて目的の移送ラインと移送方向に収束するようにしたことを特徴とする請求項2記載の重量物の移送方法。
【請求項7】
推進機構付の無限軌道帯スライド装置62と、この無限軌道帯スライド装置62の駆動油圧を発生する電動ポンプユニット33と、この電動ポンプユニット33を制御する制御ユニット36とを具備し、前記推進機構付の無限軌道帯スライド装置62は、外側面に移送方向と異なる方向に摺動可能なスライダ49を設けた軌道帯ユニット41を複数個連結して無限軌道帯19を構成し、この無限軌道帯19とこの無限軌道帯19を駆動する推進駆動装置20とを支持する受け台18を支持台16に取り付け、この支持台16に台座15を重ねあわせ、この支持台16と台座15の間を、相互の回転角度を調整するための水平調整ジャッキ28にて連結して無限軌道帯スライド装置62を構成してなり、前記無限軌道帯19に臨ませてこの無限軌道帯19の移送距離を計測する移動量測定センサ32を設け、前記水平調整ジャッキ28に回転角度調整時のストロークを計測するストローク検出センサ31を設け、これらストローク検出センサ31と移動量測定センサ32を、それぞれの検出信号に基づき推進駆動装置20と水平調整ジャッキ28の制御信号を出力する制御ユニット36に接続したことを特徴とする重量物の移送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−205090(P2007−205090A)
【公開日】平成19年8月16日(2007.8.16)
【国際特許分類】
【出願番号】特願2006−27140(P2006−27140)
【出願日】平成18年2月3日(2006.2.3)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 2005年8月5日 発明協会発行の「発明協会公開技報 公技番号2005−504579」に発表
【出願人】(592182573)オックスジャッキ株式会社 (19)
【出願人】(506122246)三菱重工橋梁エンジニアリング株式会社 (111)
【Fターム(参考)】
【公開日】平成19年8月16日(2007.8.16)
【国際特許分類】
【出願日】平成18年2月3日(2006.2.3)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 2005年8月5日 発明協会発行の「発明協会公開技報 公技番号2005−504579」に発表
【出願人】(592182573)オックスジャッキ株式会社 (19)
【出願人】(506122246)三菱重工橋梁エンジニアリング株式会社 (111)
【Fターム(参考)】
[ Back to top ]