
野菜収穫機
【課題】挟持用ローラによる根を挟持する挟持力が増し、切断した根とその根に付着した根土を排出側にかき出す根切断装置を有する野菜収穫機を提供すること。
【解決手段】
植生されている鱗茎作物を、その葉茎部を挟持しながら鱗茎部を引き抜いて、搬送装置により葉茎部を直立状態で搬送して、根切断装置にて所定長さで根を切断する野菜収穫機において、前記根切断装置は、根を挟持する左右一対の挟持用ローラと、挟持用ローラで根を挟持しながら鱗茎部から根を切断する根切りカッターを備え、前記挟持用ローラは、スターホイルの形状を有することを特徴とする野菜収穫機である。
【解決手段】
植生されている鱗茎作物を、その葉茎部を挟持しながら鱗茎部を引き抜いて、搬送装置により葉茎部を直立状態で搬送して、根切断装置にて所定長さで根を切断する野菜収穫機において、前記根切断装置は、根を挟持する左右一対の挟持用ローラと、挟持用ローラで根を挟持しながら鱗茎部から根を切断する根切りカッターを備え、前記挟持用ローラは、スターホイルの形状を有することを特徴とする野菜収穫機である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は野菜収穫機、例えば、大蒜、玉葱或いは百合根といった鱗茎作物を収穫する野菜収穫機に関し、特に根切断装置が改良された野菜収穫機に関する。
【背景技術】
【0002】
従来、植生されている鱗茎作物を、その葉茎部を挟持しながら鱗茎部を引き抜きいて、搬送装置により葉茎部を直立状態で搬送して、根切断装置にて所定長さで髭根(以下、根部ともいう。)を切断する野菜収穫機が開示されている。
【0003】
その野菜収穫機に搭載された根切断装置は、根部を挟持する左右一対の挟持用ローラと根切りカッターを備えており、後方移送されてくる鱗茎作物のしながら、根切断装置の挟持用ローラで葉茎部を挟持しながら根部を根切りカッターで切断するものである(例えば、特許文献1参照。)。
【0004】
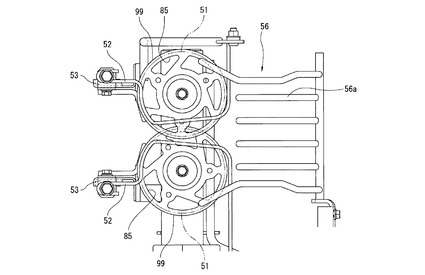
図8は、従来の根切断装置の構造を示した説明図である。図8に示すように、従来の根切断装置は、円筒状で弾性変形可能な挟持用ローラ99,99を、同挟持用ローラ99,99の直径よりも狭い間隔で左右に配置し、挟持用ローラ99,99の互いに対向する面を当接変形させつつ鱗茎作物の根を挟持しながら根切りカッター51,51により切断している。このように、挟持用ローラ99,99を変形させながら根を挟持することにより、挟持用ローラ99,99と根との接触面積を増やして、しっかりと保持できるようにしている。しかも、このような変形挟持を実現するために、挟持用ローラ99,99には、表面を半径方向内方へ撓ませるための抜き孔85が設けられている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−254864号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところが、図8に示すような従来の根切断装置では、前記抜き孔85に根土が堆積してしまい、ローラを半径方向内方へ撓ませることができず、挟持用ローラ99,99を回転させる負荷が大きくなる問題が生じていた。また、根切りカッター51,51と挟持用ローラ99,99との隙間が大きいと、その隙間に根土が堆積してしまい、その根土が回転の妨げとなり、根切りカッター51,51にも大きな負荷が生じる問題も有していた。
【課題を解決するための手段】
【0007】
そこで、請求項1に記載の発明は、植生されている鱗茎作物を、その葉茎部を挟持しながら鱗茎部を引き抜いて、搬送装置により葉茎部を直立状態で搬送して、根切断装置にて所定長さで根を切断する野菜収穫機において、前記根切断装置は、根を挟持する左右一対の挟持用ローラと、挟持用ローラで根を挟持しながら鱗茎部から根を切断する根切りカッターを備え、前記挟持用ローラはスターホイルの形状を有することを特徴とする野菜収穫機である。
【0008】
請求項2に記載の発明は、前記根切りカッターと挟持用ローラとの隙間を可及的に小さくしたことを特徴とする請求項1に記載の野菜収穫機である。
【0009】
請求項3に記載の発明は、鱗茎作物を直立状態で根切断装置内に導入する左右一対のガイドバネを支持するガイドバネステーを、前記根切りカッターの上方に向かって左右両側方からそれぞれ出したことを特徴とする請求項1又は請求項2に記載の野菜収穫機である。
【発明の効果】
【0010】
(1)請求項1記載の本発明では、挟持用ローラは、スターホイルの形状を有するので、ローラ外周部の凹凸歯によりが根に作用させる面積が大きくなり、これを左右一対として噛み合わせる構造とすることで挟持力が増す。また、切断した根とその根に付着した根土を排出側にかき出す効果がある。さらに、前記のように噛み合わせる構造であり、ローラ本体をつぶさない構造であるので、従来に比べて刃の外径より挟持用ローラの外径を大きくすることができる。また、従来の円筒状の挟持用ローラのようにローラ本体をつぶさないので抜き穴に根土がたまることなく、根土が堆積することが少なくなり、挟持用ローラへの根土の堆積を低減させることができる。
【0011】
(2)請求項2記載の本発明では、前記根切りカッターと前記挟持用ローラとの隙間を可及的に小さくしている。これにより、根切りカッターと挟持用ローラとの間への根土の堆積を最小限としている。
【0012】
(3)請求項3記載の本発明では、根切断装置の導入前では根土を有する状態で鱗茎作物が導入されるので、その導入部分に左右一対のガイドバネステーが存在すると、そのガイドバネステーに根土が堆積しやすい。そこで、ガイドバネステーを、左右両側方から根切りカッターの上方まで出すことで、左右一対のガイドバネステーに根土が堆積しにくい構造とすることができ、またガイドバネステーの掃除性を向上することができる。
【図面の簡単な説明】
【0013】
【図1】この発明の実施形態における野菜収穫機の全体構成を示した側面図である。
【図2】この発明の実施形態における野菜収穫機の全体構成を示した平面図である。
【図3】この発明の実施形態における野菜収穫機の根切断装置を分解した構成を示した斜視図である。
【図4】この発明の実施形態における野菜収穫機の動力伝達機構を示した側面図である。
【図5】この発明の実施形態における野菜収穫機の根切断装置の全体構成を示した正面図である。
【図6】この発明の実施形態における野菜収穫機の根切断装置の全体構成を示した平面図である。
【図7】この発明の実施形態における野菜収穫機の根切断装置で収穫物の根を切断した状態を示した側面図である。
【図8】従来の野菜収穫機の根切断装置の全体構成を示した平面図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態を図面を参照して説明する。なお、本実施形態に係る野菜収穫機Aは、鱗茎作物11を収穫するものであり、このような鱗茎作物としては、例えば、大蒜、玉葱又は百合根等を挙げることができる。
【0015】
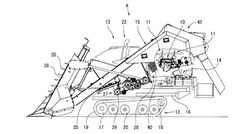
図1〜図2に示すように、本実施形態に係る野菜収穫機Aは、クローラ形の走行部12と、運転者により走行操作及び収穫操作が行われる運転部13と、鱗茎作物11を収穫する収穫部14と、収穫した鱗茎作物を搬送する搬送部15とで構成されている。
【0016】
走行部12は、図1に示すように、前後方向に伸延する走行フレーム16の前端部に駆動輪17を連動連結する一方、同走行フレーム16の後端部に遊動輪18を回転自在に軸支し、これら駆動輪17と遊動輪18との間に履帯19を巻回している。図中、符号20は転動輪である。
【0017】
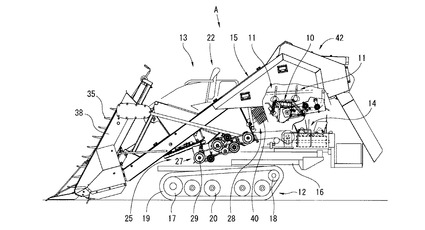
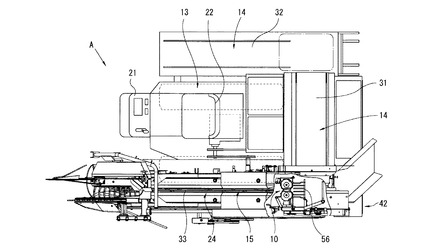
運転部13は、図2に示すように、その前部に配置されたフロントコラム21を備えると共に、作業者が着座するための運転席22を備えている。
【0018】
収穫部14は、図1及び図2に示すように、掻込装置38、搬送装置24、肩揃え装置25、根切断装置10、茎葉部切断装置37などを一つの側部処理ユニット42に構成しておき、この側部処理ユニット42を走行フレーム16に設けられる支点軸(図示せず)回りの上下方向へ回動して鱗茎作物11の引抜位置を調整するようにしたものである。
【0019】
搬送部15は、図2に示すように、運転部13の後方に配設した第1搬送コンベア31と、運転部13の側方に配設した第2搬送コンベア32とを有する。第1搬送コンベア31は、根切断装置10で根部11c(図7に示す)が切断された鱗茎部11bを収穫物として第2搬送コンベア32まで搬送するものである。第2搬送コンベア32は、第1搬送コンベア31により移送された鱗茎部11bのうち良品として選別されたものを搬出可能としている
【0020】
掻込装置38は、鱗茎作物11の葉茎部11aを機体前方より掻き込んで、後述の搬送装置24により鱗茎作物11の引き抜きを容易とするための部位である。具体的には、掻込装置38には後上がり傾斜の平面内で後方回動するタイン35が備えられており、鱗茎作物11の鱗茎部11bは地中に存在させた状態で、このタイン35により葉茎部11aの掻き込みを行う。
【0021】
そして、掻込装置38で掻き込まれた葉茎部11aは、その後方に設けられている後上がり傾斜の平面内で対向面によって挟持されながら共に後方回動する一対のベルト33からなる搬送装置24で挟持されることで鱗茎作物11が地中から引き抜かれる。
【0022】
搬送装置24は、図1及び図2に示すように、後述する側部処理ユニット42の後部に設けられた駆動プーリ(図示せず)に、無端状のベルト33を掛け回して構成している。
【0023】
そして搬送装置24は、掻込装置38にて掻き込まれた葉茎部11aを挟持して引き抜き、引き抜かれた鱗茎作物11は、葉茎部11a部分が挟持されたままの状態で、ほぼ垂直に吊り下げられた姿勢で後上方へと搬送されて行く。
【0024】
図1に示すように、搬送装置24の搬送部15の中途には、肩揃え装置25、直交泥落し装置27及び根部整姿装置28等が配設されている。
【0025】
肩揃え装置25は、搬送装置24で引抜いた鱗茎作物11の鱗茎部11bの位置を揃える(一定にする)装置である。
【0026】
直交泥落し装置27は、図1に示すように、肩揃え装置25の終端部下方に、放射状に形成した回転体29の回転軸を、搬送装置24の搬送方向に対して直交させて配設し、この回転体29を左側面視(図1参照)で時計回りに回転させて鱗茎部11bから伸びた根部11cや鱗茎部11bに付着した土を落す装置である。
【0027】
根部整姿装置28は、軸回転ブラシを設けた回転体40、40が互いに逆回転しつつ鱗茎部11bの底面や根部11cに作用して土を落すとともに、根切断装置10で根部11cを切断するために、根部11cの姿勢を整える。
【0028】
図2に示すように、搬送装置24の搬送部15の後部であって、第1搬送コンベア31の始端部上方には根切断装置10を配設している。この根切断装置10は、本発明の要部構成を含むものであり、後に図面を参照しながら詳述する。
【0029】
更に、根切断装置10の上方であって、後方に茎葉部切断装置(図示せず)を配設している。茎葉部切断装置37は、鱗茎部11bから葉茎部11aを所定長さで切断するものである。
【0030】
このように構成された野菜収穫機Aは、まず、葉茎部11aを挟持して鱗茎作物11を引き抜き、これをその吊り下げ姿勢を保ったままで後上方に搬送する間、鱗茎部11bの底面から下向きに延びている根部11cを切断し、その上部の葉茎部11aも切断することで、残った鱗茎部11bを収穫するものであり、このような収穫作業を走行しながら行なうものである。
【0031】
次に、本発明の要部構成を含む根切断装置10について説明する。根切断装置10は、搬送装置24の後部に配設され、搬送装置24により吊り下げられながら搬送される鱗茎作物11の根部11cを鱗茎部11bから所定長さで切断するものである。
【0032】
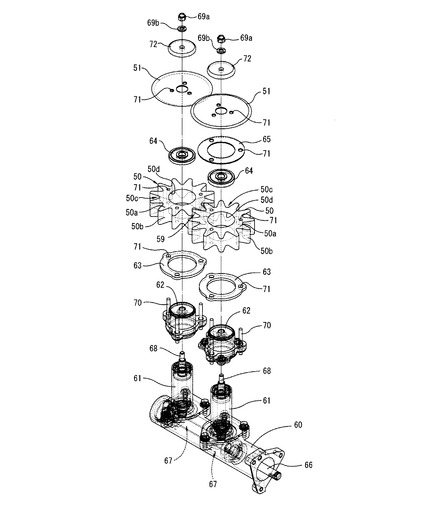
図3に根切断装置10の分解斜視図を示す。図3に示すように、根切断装置10は、搬送経路46を挟んで左右対象に設けられた一対の根切りカッター51,51と、各根切りカッター51,51の下方に配置され、根を挟持しながら後方にかき出す挟持用ローラ50,50と、根切りカッター51,51及び挟持用ローラ50,50を支持回転部材62により一体にして回転させるべく、エンジンEからの動力を伝達する駆動入力軸66が収容された円筒状の駆動入力ケース60を備えている。
【0033】
根切りカッター51,51は、外周部を鋭利にした円板状に形成しており、一部重ねた状態で上下方向に近接しつつ回転自在に配設される。
【0034】
すなわち、左右の根切りカッター51,51のうち、いずれか一方の根切りカッター51の下方に所定厚みの第3スペーサ65を入れることで、一方の根切りカッター51を、他方に対して上方に位置させるようにしている。
【0035】
この第3スペーサ65は、他方の根切りカッター51の厚みよりは少なくとも厚いものの、可及的に厚みを薄く形成しており、根切りカッター51,51と挟持用ローラ50,50との隙間を可及的に小さくしている。このようにすることで、前記隙間に根土が堆積するのを低減している。
【0036】
また、左右の根切りカッター51,51の下方には、第2スペーサ64を介して挟持用ローラ50,50が配設される。挟持用ローラ50,50については後で詳細に説明する。
【0037】
駆動入力ケース60は、同駆動入力ケース60の上部から上方に起立させた筒状の円筒ケース61を配設している。円筒ケース61の上端部には、根切りカッター51,51や挟持用ローラ50,50を支持しながら一体で回転させる支持回転部材62を配設している。
【0038】
また、前記支持回転部材62は、上方に突出させた棒状体70を120°間隔で3つ配設し、各棒状体70に前記挟持用ローラ50,50や根切りカッター51,51等の部材の孔部71にそれぞれ挿通させることで、これらが一体になった状態で回転自在としている。
【0039】
さらに、支持回転部材62上に第1スペーサ63を介して左右一対の挟持用ローラ50,50を配設している。さらに、挟持用ローラ50,50の上方には第2スペーサ64を介して左右一対の根切りカッター51,51を配設している。
【0040】
そして、前記円筒ケース61には、駆動入力ケース60内の駆動入力軸66からベベルギヤ67を介して根切りカッター51,51や挟持用ローラ50,50を回転させるカッター駆動軸68を配設している。そのカッター駆動軸68を円筒ケース61から上方に突出させ、挟持用ローラ50,50、根切りカッター51,51及び第4スペーサ72の中央部に挿通させ、上端でナット69a及びワッシャ69bにより留めることで、挟持用ローラ50,50及び根切りカッター51,51を連結している。
【0041】
前記のように構成された根切りカッター51,51及び挟持用ローラ50,50は、エンジンEからの動力を得て駆動可能としている。すなわち、根切断装置10への動力は、図4に示すように、エンジンEからの動力を所定の駆動機構を介してエンジン側入力軸75に伝達している。また、エンジン側入力軸75に第1伝動プーリ77を設け、前記根切断装置10側に第2伝動プーリ79を設け、第1伝動プーリ77と第2伝動プーリ79との間に伝動ベルト78を巻回している。
【0042】
また、伝動ベルト78の中途部の上部には常時テンションローラ80を設け、中途部下部にはテンションクラッチ76を設けている。さらに、第2伝動プーリ79と駆動入力軸66とをギア機構81を介して連結している。このように構成することで、エンジンEからの動力をエンジン側入力軸75からテンションクラッチ76を介して駆動入力ケース60内の前記駆動入力軸66に入力可能としている。そして、運転部13で操作者が根切断操作を実施することでテンションクラッチ76が入り状態になって、根切断装置10が駆動状態となる。
【0043】
そのような構成において、本実施形態における挟持用ローラ50,50は、ゴム製の弾性体からなるローラ本体50aの外周部分に噛合部59が設けられたスターホイルの形状を有することを特徴とする。
【0044】
図3に示すように、挟持用ローラ50,50は、そのローラ本体50aの中心部にカッター駆動軸68を挿通する軸挿通孔50dを有すると共に、ローラ本体50aの外周部に噛合部59を有する。
【0045】
噛合部59は、ローラ本体50aから放射状に延伸させた複数の凸状部50bを有すると共に、各凸状部50bとの間にはローラ本体50a中心側に凹みを設けた凹状部50cを有する。挟持用ローラ50,50の凸状部50bは、その先端に所定曲率を有する丸みを形成している。なお、挟持用ローラ50,50に形成される凸状部59b及び凹状部59cの数は限定されず、また、挟持用ローラ50,50の径の大きさも限定されない。また、挟持用ローラ50,50の素材は、ゴム製の弾性体に限定されず、弾性変形ができるスポンジ等で構成してもよい。
【0046】
そして、挟持用ローラ50,50を左右一対で噛合部59を有するように構成し、その噛合部59で根を挟持するようにしている。すなわち、図3に示すように、一方の挟持用ローラ50の複数の凸状部50bが他方の挟持用ローラ50の複数の凹状部50c内に係合することにより噛合部59を形成している。
【0047】
そして、根部11cは、一方の挟持用ローラ50の複数の凸状部59aの側面部と他方の挟持用ローラ50の凸状部50bの側面部とで挟持される。このように、係合する凸状部50bの側面部同士で根に作用する面積を増やしている。
【0048】
また、図6に示すように、挟持用ローラ50,50の凸状部50bの先端が根切りカッター51,51の外縁から突出している。このように、挟持用ローラ50,50の径を根切りカッター51,51の径よりも大きくすることが可能であり、凸状部50bの側面部同士で根に作用する面積を増やすことができ、根部11cの挟持力が増すと共に搬出側にかき出す力も増す。
【0049】
従来では、つぶれ代(変形)を形成することで、根に作用する面積を増やしていたが、つぶれ代を形成するためには、挟持用ローラ50,50には抜き孔(図8に示すような抜き孔85)を設ける必要があったが、抜き孔を設けるとそこに根土が堆積する問題が生じていた。
【0050】
これに対して、従来のつぶれ代に代わり、本願発明は噛合部59を構成することで、根を挟持するようにしている。前記のように、挟持用ローラ50,50は、その径を根切りカッター51,51の径よりも大きくすることができ、根部11cの挟持力が増すと共に搬出側にかき出す力も増す。また、本実施形態の挟持用ローラ50,50には抜き孔を配設していないので、その抜き孔に根土が入り込む心配もない。
【0051】
さらに、根切断装置10は、鱗茎作物11を直立状態で根切断装置10に誘導する左右一対のガイドバネ52,52を有しており、そのガイドバネ52,52を支持するガイドバネステー53,53を有している。ガイドバネステー53,53は、根切断装置10を固定する左右一対の支持フレーム55,55に取り付けられている。
【0052】
従来では、図8に示すように、挟持用ローラ50,50の直前部にガイドバネステー53,53を配設していた。このため、根切断装置10は、鱗茎作物11が供給されるにつれて鱗茎作物11の根に付着している根土がガイドバネステー53,53に付着しやすい構造を有していた。
【0053】
そこで、本実施形態では、図5及び図6に示すように、ガイドバネステー53,53を前記の根切りカッター51,51の上方の左右両側方から出して左右一対で構成している。このようにして、根土がガイドバネステー53,53に堆積しにくくなり、また、根土が堆積した場合でもそれを取り除く掃除性を向上させることができる。
【0054】
図7に示すように、根切断装置10の後方には、レーキ56を側面視で後方下がりに傾斜させて配設している。本実施形態では、6本の丸い棒部材56aを所定間隔で配置することにより平面視で搬送経路Cを形成している。レーキ56は、走行フレーム16に締結部材58を介して取付けている。このレーキ56の上端部は、根切断装置10に連接すると共に、下方は鱗茎部11bを収容する第1搬送コンベア31の始端部に配設している。
【0055】
このような構造により、鱗茎部11bは第1搬送コンベア31の始端部に落下する。また、根切断装置10で切断された根部11cは重力作用により下方へ落下し、切断時の勢いが比較的小さいものはレーキ56の棒部材71a間を通過して落下する。ところが、切断された根が切断時の勢いで第1搬送コンベア31の始端部まで落下してしまうものが存在する。
【0056】
そこで、本実施形態では、図7に示すように、脱着可能なゴムタレ57をレーキ56に取り付けている。ゴムタレ57は、その上端部を取付部材82によりレーキ56の後端部に取り付け、その下端部を第1搬送コンベア31の始端部に立設された板状ガイド83の上端部に掛止している。ゴムタレ57は、その全体が矩形の板形状を有し、第1搬送コンベア31の始端部を機体前面側から覆うように取り付けられている。このようにゴムタレ57をレーキ56の下端部に取り付けることで、根切断装置10の切断した根が第1搬送コンベア31に飛散するのを防止することができる。
【0057】
ゴムタレ57は、例えば、ラバー製などの柔軟な素材を使用することで、レーキ56の下方の構造が複雑で狭い空間でも、柔軟な素材によって形状を変形させて前記レーキ56を存在させることができる。また、ゴムタレ57はレーキ56に脱着可能とすることができ、鱗茎作物11に付着した根土の状況に合わせてゴムタレ57を装着したり脱着したりすることができる。
【0058】
さらに、前記ゴムタレ57はその下端部を自由端とすることができる。これにより、機械の姿勢に関わらず、常に下向きにゴムタレ57が向き、作業部を上下しても機体の一部への引掛りを防ぐことができる。
【符号の説明】
【0059】
A 野菜収穫機
11a 葉茎部
11b 鱗茎部
11c 根
10 根切断装置
24 搬送装置
50 挟持用ローラ
51 根切りカッター
52 ガイドバネ
53 ガイドバネステー
【技術分野】
【0001】
本発明は野菜収穫機、例えば、大蒜、玉葱或いは百合根といった鱗茎作物を収穫する野菜収穫機に関し、特に根切断装置が改良された野菜収穫機に関する。
【背景技術】
【0002】
従来、植生されている鱗茎作物を、その葉茎部を挟持しながら鱗茎部を引き抜きいて、搬送装置により葉茎部を直立状態で搬送して、根切断装置にて所定長さで髭根(以下、根部ともいう。)を切断する野菜収穫機が開示されている。
【0003】
その野菜収穫機に搭載された根切断装置は、根部を挟持する左右一対の挟持用ローラと根切りカッターを備えており、後方移送されてくる鱗茎作物のしながら、根切断装置の挟持用ローラで葉茎部を挟持しながら根部を根切りカッターで切断するものである(例えば、特許文献1参照。)。
【0004】
図8は、従来の根切断装置の構造を示した説明図である。図8に示すように、従来の根切断装置は、円筒状で弾性変形可能な挟持用ローラ99,99を、同挟持用ローラ99,99の直径よりも狭い間隔で左右に配置し、挟持用ローラ99,99の互いに対向する面を当接変形させつつ鱗茎作物の根を挟持しながら根切りカッター51,51により切断している。このように、挟持用ローラ99,99を変形させながら根を挟持することにより、挟持用ローラ99,99と根との接触面積を増やして、しっかりと保持できるようにしている。しかも、このような変形挟持を実現するために、挟持用ローラ99,99には、表面を半径方向内方へ撓ませるための抜き孔85が設けられている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−254864号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところが、図8に示すような従来の根切断装置では、前記抜き孔85に根土が堆積してしまい、ローラを半径方向内方へ撓ませることができず、挟持用ローラ99,99を回転させる負荷が大きくなる問題が生じていた。また、根切りカッター51,51と挟持用ローラ99,99との隙間が大きいと、その隙間に根土が堆積してしまい、その根土が回転の妨げとなり、根切りカッター51,51にも大きな負荷が生じる問題も有していた。
【課題を解決するための手段】
【0007】
そこで、請求項1に記載の発明は、植生されている鱗茎作物を、その葉茎部を挟持しながら鱗茎部を引き抜いて、搬送装置により葉茎部を直立状態で搬送して、根切断装置にて所定長さで根を切断する野菜収穫機において、前記根切断装置は、根を挟持する左右一対の挟持用ローラと、挟持用ローラで根を挟持しながら鱗茎部から根を切断する根切りカッターを備え、前記挟持用ローラはスターホイルの形状を有することを特徴とする野菜収穫機である。
【0008】
請求項2に記載の発明は、前記根切りカッターと挟持用ローラとの隙間を可及的に小さくしたことを特徴とする請求項1に記載の野菜収穫機である。
【0009】
請求項3に記載の発明は、鱗茎作物を直立状態で根切断装置内に導入する左右一対のガイドバネを支持するガイドバネステーを、前記根切りカッターの上方に向かって左右両側方からそれぞれ出したことを特徴とする請求項1又は請求項2に記載の野菜収穫機である。
【発明の効果】
【0010】
(1)請求項1記載の本発明では、挟持用ローラは、スターホイルの形状を有するので、ローラ外周部の凹凸歯によりが根に作用させる面積が大きくなり、これを左右一対として噛み合わせる構造とすることで挟持力が増す。また、切断した根とその根に付着した根土を排出側にかき出す効果がある。さらに、前記のように噛み合わせる構造であり、ローラ本体をつぶさない構造であるので、従来に比べて刃の外径より挟持用ローラの外径を大きくすることができる。また、従来の円筒状の挟持用ローラのようにローラ本体をつぶさないので抜き穴に根土がたまることなく、根土が堆積することが少なくなり、挟持用ローラへの根土の堆積を低減させることができる。
【0011】
(2)請求項2記載の本発明では、前記根切りカッターと前記挟持用ローラとの隙間を可及的に小さくしている。これにより、根切りカッターと挟持用ローラとの間への根土の堆積を最小限としている。
【0012】
(3)請求項3記載の本発明では、根切断装置の導入前では根土を有する状態で鱗茎作物が導入されるので、その導入部分に左右一対のガイドバネステーが存在すると、そのガイドバネステーに根土が堆積しやすい。そこで、ガイドバネステーを、左右両側方から根切りカッターの上方まで出すことで、左右一対のガイドバネステーに根土が堆積しにくい構造とすることができ、またガイドバネステーの掃除性を向上することができる。
【図面の簡単な説明】
【0013】
【図1】この発明の実施形態における野菜収穫機の全体構成を示した側面図である。
【図2】この発明の実施形態における野菜収穫機の全体構成を示した平面図である。
【図3】この発明の実施形態における野菜収穫機の根切断装置を分解した構成を示した斜視図である。
【図4】この発明の実施形態における野菜収穫機の動力伝達機構を示した側面図である。
【図5】この発明の実施形態における野菜収穫機の根切断装置の全体構成を示した正面図である。
【図6】この発明の実施形態における野菜収穫機の根切断装置の全体構成を示した平面図である。
【図7】この発明の実施形態における野菜収穫機の根切断装置で収穫物の根を切断した状態を示した側面図である。
【図8】従来の野菜収穫機の根切断装置の全体構成を示した平面図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態を図面を参照して説明する。なお、本実施形態に係る野菜収穫機Aは、鱗茎作物11を収穫するものであり、このような鱗茎作物としては、例えば、大蒜、玉葱又は百合根等を挙げることができる。
【0015】
図1〜図2に示すように、本実施形態に係る野菜収穫機Aは、クローラ形の走行部12と、運転者により走行操作及び収穫操作が行われる運転部13と、鱗茎作物11を収穫する収穫部14と、収穫した鱗茎作物を搬送する搬送部15とで構成されている。
【0016】
走行部12は、図1に示すように、前後方向に伸延する走行フレーム16の前端部に駆動輪17を連動連結する一方、同走行フレーム16の後端部に遊動輪18を回転自在に軸支し、これら駆動輪17と遊動輪18との間に履帯19を巻回している。図中、符号20は転動輪である。
【0017】
運転部13は、図2に示すように、その前部に配置されたフロントコラム21を備えると共に、作業者が着座するための運転席22を備えている。
【0018】
収穫部14は、図1及び図2に示すように、掻込装置38、搬送装置24、肩揃え装置25、根切断装置10、茎葉部切断装置37などを一つの側部処理ユニット42に構成しておき、この側部処理ユニット42を走行フレーム16に設けられる支点軸(図示せず)回りの上下方向へ回動して鱗茎作物11の引抜位置を調整するようにしたものである。
【0019】
搬送部15は、図2に示すように、運転部13の後方に配設した第1搬送コンベア31と、運転部13の側方に配設した第2搬送コンベア32とを有する。第1搬送コンベア31は、根切断装置10で根部11c(図7に示す)が切断された鱗茎部11bを収穫物として第2搬送コンベア32まで搬送するものである。第2搬送コンベア32は、第1搬送コンベア31により移送された鱗茎部11bのうち良品として選別されたものを搬出可能としている
【0020】
掻込装置38は、鱗茎作物11の葉茎部11aを機体前方より掻き込んで、後述の搬送装置24により鱗茎作物11の引き抜きを容易とするための部位である。具体的には、掻込装置38には後上がり傾斜の平面内で後方回動するタイン35が備えられており、鱗茎作物11の鱗茎部11bは地中に存在させた状態で、このタイン35により葉茎部11aの掻き込みを行う。
【0021】
そして、掻込装置38で掻き込まれた葉茎部11aは、その後方に設けられている後上がり傾斜の平面内で対向面によって挟持されながら共に後方回動する一対のベルト33からなる搬送装置24で挟持されることで鱗茎作物11が地中から引き抜かれる。
【0022】
搬送装置24は、図1及び図2に示すように、後述する側部処理ユニット42の後部に設けられた駆動プーリ(図示せず)に、無端状のベルト33を掛け回して構成している。
【0023】
そして搬送装置24は、掻込装置38にて掻き込まれた葉茎部11aを挟持して引き抜き、引き抜かれた鱗茎作物11は、葉茎部11a部分が挟持されたままの状態で、ほぼ垂直に吊り下げられた姿勢で後上方へと搬送されて行く。
【0024】
図1に示すように、搬送装置24の搬送部15の中途には、肩揃え装置25、直交泥落し装置27及び根部整姿装置28等が配設されている。
【0025】
肩揃え装置25は、搬送装置24で引抜いた鱗茎作物11の鱗茎部11bの位置を揃える(一定にする)装置である。
【0026】
直交泥落し装置27は、図1に示すように、肩揃え装置25の終端部下方に、放射状に形成した回転体29の回転軸を、搬送装置24の搬送方向に対して直交させて配設し、この回転体29を左側面視(図1参照)で時計回りに回転させて鱗茎部11bから伸びた根部11cや鱗茎部11bに付着した土を落す装置である。
【0027】
根部整姿装置28は、軸回転ブラシを設けた回転体40、40が互いに逆回転しつつ鱗茎部11bの底面や根部11cに作用して土を落すとともに、根切断装置10で根部11cを切断するために、根部11cの姿勢を整える。
【0028】
図2に示すように、搬送装置24の搬送部15の後部であって、第1搬送コンベア31の始端部上方には根切断装置10を配設している。この根切断装置10は、本発明の要部構成を含むものであり、後に図面を参照しながら詳述する。
【0029】
更に、根切断装置10の上方であって、後方に茎葉部切断装置(図示せず)を配設している。茎葉部切断装置37は、鱗茎部11bから葉茎部11aを所定長さで切断するものである。
【0030】
このように構成された野菜収穫機Aは、まず、葉茎部11aを挟持して鱗茎作物11を引き抜き、これをその吊り下げ姿勢を保ったままで後上方に搬送する間、鱗茎部11bの底面から下向きに延びている根部11cを切断し、その上部の葉茎部11aも切断することで、残った鱗茎部11bを収穫するものであり、このような収穫作業を走行しながら行なうものである。
【0031】
次に、本発明の要部構成を含む根切断装置10について説明する。根切断装置10は、搬送装置24の後部に配設され、搬送装置24により吊り下げられながら搬送される鱗茎作物11の根部11cを鱗茎部11bから所定長さで切断するものである。
【0032】
図3に根切断装置10の分解斜視図を示す。図3に示すように、根切断装置10は、搬送経路46を挟んで左右対象に設けられた一対の根切りカッター51,51と、各根切りカッター51,51の下方に配置され、根を挟持しながら後方にかき出す挟持用ローラ50,50と、根切りカッター51,51及び挟持用ローラ50,50を支持回転部材62により一体にして回転させるべく、エンジンEからの動力を伝達する駆動入力軸66が収容された円筒状の駆動入力ケース60を備えている。
【0033】
根切りカッター51,51は、外周部を鋭利にした円板状に形成しており、一部重ねた状態で上下方向に近接しつつ回転自在に配設される。
【0034】
すなわち、左右の根切りカッター51,51のうち、いずれか一方の根切りカッター51の下方に所定厚みの第3スペーサ65を入れることで、一方の根切りカッター51を、他方に対して上方に位置させるようにしている。
【0035】
この第3スペーサ65は、他方の根切りカッター51の厚みよりは少なくとも厚いものの、可及的に厚みを薄く形成しており、根切りカッター51,51と挟持用ローラ50,50との隙間を可及的に小さくしている。このようにすることで、前記隙間に根土が堆積するのを低減している。
【0036】
また、左右の根切りカッター51,51の下方には、第2スペーサ64を介して挟持用ローラ50,50が配設される。挟持用ローラ50,50については後で詳細に説明する。
【0037】
駆動入力ケース60は、同駆動入力ケース60の上部から上方に起立させた筒状の円筒ケース61を配設している。円筒ケース61の上端部には、根切りカッター51,51や挟持用ローラ50,50を支持しながら一体で回転させる支持回転部材62を配設している。
【0038】
また、前記支持回転部材62は、上方に突出させた棒状体70を120°間隔で3つ配設し、各棒状体70に前記挟持用ローラ50,50や根切りカッター51,51等の部材の孔部71にそれぞれ挿通させることで、これらが一体になった状態で回転自在としている。
【0039】
さらに、支持回転部材62上に第1スペーサ63を介して左右一対の挟持用ローラ50,50を配設している。さらに、挟持用ローラ50,50の上方には第2スペーサ64を介して左右一対の根切りカッター51,51を配設している。
【0040】
そして、前記円筒ケース61には、駆動入力ケース60内の駆動入力軸66からベベルギヤ67を介して根切りカッター51,51や挟持用ローラ50,50を回転させるカッター駆動軸68を配設している。そのカッター駆動軸68を円筒ケース61から上方に突出させ、挟持用ローラ50,50、根切りカッター51,51及び第4スペーサ72の中央部に挿通させ、上端でナット69a及びワッシャ69bにより留めることで、挟持用ローラ50,50及び根切りカッター51,51を連結している。
【0041】
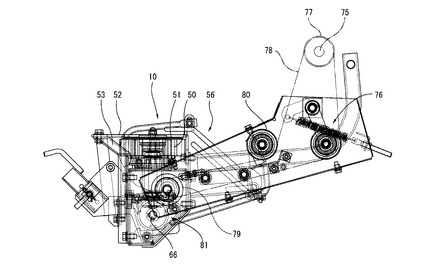
前記のように構成された根切りカッター51,51及び挟持用ローラ50,50は、エンジンEからの動力を得て駆動可能としている。すなわち、根切断装置10への動力は、図4に示すように、エンジンEからの動力を所定の駆動機構を介してエンジン側入力軸75に伝達している。また、エンジン側入力軸75に第1伝動プーリ77を設け、前記根切断装置10側に第2伝動プーリ79を設け、第1伝動プーリ77と第2伝動プーリ79との間に伝動ベルト78を巻回している。
【0042】
また、伝動ベルト78の中途部の上部には常時テンションローラ80を設け、中途部下部にはテンションクラッチ76を設けている。さらに、第2伝動プーリ79と駆動入力軸66とをギア機構81を介して連結している。このように構成することで、エンジンEからの動力をエンジン側入力軸75からテンションクラッチ76を介して駆動入力ケース60内の前記駆動入力軸66に入力可能としている。そして、運転部13で操作者が根切断操作を実施することでテンションクラッチ76が入り状態になって、根切断装置10が駆動状態となる。
【0043】
そのような構成において、本実施形態における挟持用ローラ50,50は、ゴム製の弾性体からなるローラ本体50aの外周部分に噛合部59が設けられたスターホイルの形状を有することを特徴とする。
【0044】
図3に示すように、挟持用ローラ50,50は、そのローラ本体50aの中心部にカッター駆動軸68を挿通する軸挿通孔50dを有すると共に、ローラ本体50aの外周部に噛合部59を有する。
【0045】
噛合部59は、ローラ本体50aから放射状に延伸させた複数の凸状部50bを有すると共に、各凸状部50bとの間にはローラ本体50a中心側に凹みを設けた凹状部50cを有する。挟持用ローラ50,50の凸状部50bは、その先端に所定曲率を有する丸みを形成している。なお、挟持用ローラ50,50に形成される凸状部59b及び凹状部59cの数は限定されず、また、挟持用ローラ50,50の径の大きさも限定されない。また、挟持用ローラ50,50の素材は、ゴム製の弾性体に限定されず、弾性変形ができるスポンジ等で構成してもよい。
【0046】
そして、挟持用ローラ50,50を左右一対で噛合部59を有するように構成し、その噛合部59で根を挟持するようにしている。すなわち、図3に示すように、一方の挟持用ローラ50の複数の凸状部50bが他方の挟持用ローラ50の複数の凹状部50c内に係合することにより噛合部59を形成している。
【0047】
そして、根部11cは、一方の挟持用ローラ50の複数の凸状部59aの側面部と他方の挟持用ローラ50の凸状部50bの側面部とで挟持される。このように、係合する凸状部50bの側面部同士で根に作用する面積を増やしている。
【0048】
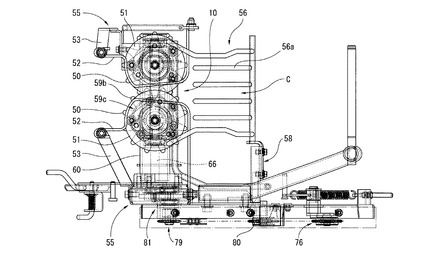
また、図6に示すように、挟持用ローラ50,50の凸状部50bの先端が根切りカッター51,51の外縁から突出している。このように、挟持用ローラ50,50の径を根切りカッター51,51の径よりも大きくすることが可能であり、凸状部50bの側面部同士で根に作用する面積を増やすことができ、根部11cの挟持力が増すと共に搬出側にかき出す力も増す。
【0049】
従来では、つぶれ代(変形)を形成することで、根に作用する面積を増やしていたが、つぶれ代を形成するためには、挟持用ローラ50,50には抜き孔(図8に示すような抜き孔85)を設ける必要があったが、抜き孔を設けるとそこに根土が堆積する問題が生じていた。
【0050】
これに対して、従来のつぶれ代に代わり、本願発明は噛合部59を構成することで、根を挟持するようにしている。前記のように、挟持用ローラ50,50は、その径を根切りカッター51,51の径よりも大きくすることができ、根部11cの挟持力が増すと共に搬出側にかき出す力も増す。また、本実施形態の挟持用ローラ50,50には抜き孔を配設していないので、その抜き孔に根土が入り込む心配もない。
【0051】
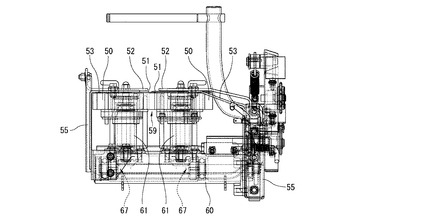
さらに、根切断装置10は、鱗茎作物11を直立状態で根切断装置10に誘導する左右一対のガイドバネ52,52を有しており、そのガイドバネ52,52を支持するガイドバネステー53,53を有している。ガイドバネステー53,53は、根切断装置10を固定する左右一対の支持フレーム55,55に取り付けられている。
【0052】
従来では、図8に示すように、挟持用ローラ50,50の直前部にガイドバネステー53,53を配設していた。このため、根切断装置10は、鱗茎作物11が供給されるにつれて鱗茎作物11の根に付着している根土がガイドバネステー53,53に付着しやすい構造を有していた。
【0053】
そこで、本実施形態では、図5及び図6に示すように、ガイドバネステー53,53を前記の根切りカッター51,51の上方の左右両側方から出して左右一対で構成している。このようにして、根土がガイドバネステー53,53に堆積しにくくなり、また、根土が堆積した場合でもそれを取り除く掃除性を向上させることができる。
【0054】
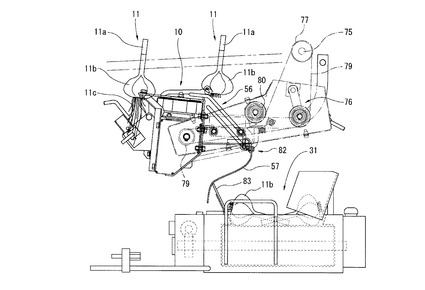
図7に示すように、根切断装置10の後方には、レーキ56を側面視で後方下がりに傾斜させて配設している。本実施形態では、6本の丸い棒部材56aを所定間隔で配置することにより平面視で搬送経路Cを形成している。レーキ56は、走行フレーム16に締結部材58を介して取付けている。このレーキ56の上端部は、根切断装置10に連接すると共に、下方は鱗茎部11bを収容する第1搬送コンベア31の始端部に配設している。
【0055】
このような構造により、鱗茎部11bは第1搬送コンベア31の始端部に落下する。また、根切断装置10で切断された根部11cは重力作用により下方へ落下し、切断時の勢いが比較的小さいものはレーキ56の棒部材71a間を通過して落下する。ところが、切断された根が切断時の勢いで第1搬送コンベア31の始端部まで落下してしまうものが存在する。
【0056】
そこで、本実施形態では、図7に示すように、脱着可能なゴムタレ57をレーキ56に取り付けている。ゴムタレ57は、その上端部を取付部材82によりレーキ56の後端部に取り付け、その下端部を第1搬送コンベア31の始端部に立設された板状ガイド83の上端部に掛止している。ゴムタレ57は、その全体が矩形の板形状を有し、第1搬送コンベア31の始端部を機体前面側から覆うように取り付けられている。このようにゴムタレ57をレーキ56の下端部に取り付けることで、根切断装置10の切断した根が第1搬送コンベア31に飛散するのを防止することができる。
【0057】
ゴムタレ57は、例えば、ラバー製などの柔軟な素材を使用することで、レーキ56の下方の構造が複雑で狭い空間でも、柔軟な素材によって形状を変形させて前記レーキ56を存在させることができる。また、ゴムタレ57はレーキ56に脱着可能とすることができ、鱗茎作物11に付着した根土の状況に合わせてゴムタレ57を装着したり脱着したりすることができる。
【0058】
さらに、前記ゴムタレ57はその下端部を自由端とすることができる。これにより、機械の姿勢に関わらず、常に下向きにゴムタレ57が向き、作業部を上下しても機体の一部への引掛りを防ぐことができる。
【符号の説明】
【0059】
A 野菜収穫機
11a 葉茎部
11b 鱗茎部
11c 根
10 根切断装置
24 搬送装置
50 挟持用ローラ
51 根切りカッター
52 ガイドバネ
53 ガイドバネステー
【特許請求の範囲】
【請求項1】
植生されている鱗茎作物を、その葉茎部を挟持しながら鱗茎部を引き抜いて、搬送装置により葉茎部を直立状態で搬送して、根切断装置にて所定長さで根を切断する野菜収穫機において、
前記根切断装置は、根を挟持する左右一対の挟持用ローラと、挟持用ローラで根を挟持しながら鱗茎部から根を切断する根切りカッターを備え、
前記挟持用ローラはスターホイルの形状を有することを特徴とする野菜収穫機。
【請求項2】
前記根切りカッターと前記挟持用ローラとの隙間を可及的に小さくしたことを特徴とする請求項1に記載の野菜収穫機。
【請求項3】
鱗茎作物を直立状態で根切断装置内に導入する左右一対のガイドバネを支持するガイドバネステーを、前記根切りカッターの上方に向かって左右両側方からそれぞれ導出したことを特徴とする請求項1又は請求項2に記載の野菜収穫機。
【請求項1】
植生されている鱗茎作物を、その葉茎部を挟持しながら鱗茎部を引き抜いて、搬送装置により葉茎部を直立状態で搬送して、根切断装置にて所定長さで根を切断する野菜収穫機において、
前記根切断装置は、根を挟持する左右一対の挟持用ローラと、挟持用ローラで根を挟持しながら鱗茎部から根を切断する根切りカッターを備え、
前記挟持用ローラはスターホイルの形状を有することを特徴とする野菜収穫機。
【請求項2】
前記根切りカッターと前記挟持用ローラとの隙間を可及的に小さくしたことを特徴とする請求項1に記載の野菜収穫機。
【請求項3】
鱗茎作物を直立状態で根切断装置内に導入する左右一対のガイドバネを支持するガイドバネステーを、前記根切りカッターの上方に向かって左右両側方からそれぞれ導出したことを特徴とする請求項1又は請求項2に記載の野菜収穫機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−70630(P2013−70630A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−209807(P2011−209807)
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
[ Back to top ]