
金インゴット鋳造用ロボットハンドおよび該ロボットハンドで把持するのに適した鋳型
【目的】 複数のロボットハンドを交換する必要がなく、1つのロボットアームに装着して金インゴットの鋳造工程の多数の作業、例えば、ルツボ供給、鋳型供給、鋳込み、離型、インゴットストック等の作業を自動化できる金インゴット鋳造用ロボットハンドを提供する。また、前述の形式の金インゴット鋳造用ロボットハンドで把持するのに適した構造を持つ鋳型を提供する。
【構成】 垂直面内で回転可能なロボット手首に取付けられた金インゴット鋳造用ロボットハンドに、鋳型把手を挟持する鋳型把手挟持手段とルツボを挟持するルツボ挟持手段を有する開閉可能に取付けられた一対の棒状部材から構成された鋳型・ルツボ用ハンドと、インゴットを挟持するインゴット挟持手段を有するインゴット用ハンドとを設ける。また、鋳型を、溶融した金が注入されて鋳込まれる鋳型本体と、鋳型本体の外壁面から垂直に外方に突出するように設けられた断面形状が四辺形である棒状の鋳型把手から構成し、鋳型把手にはロボットハンドの鋳型把手挟持手段の形状に適した形状を設ける。
【構成】 垂直面内で回転可能なロボット手首に取付けられた金インゴット鋳造用ロボットハンドに、鋳型把手を挟持する鋳型把手挟持手段とルツボを挟持するルツボ挟持手段を有する開閉可能に取付けられた一対の棒状部材から構成された鋳型・ルツボ用ハンドと、インゴットを挟持するインゴット挟持手段を有するインゴット用ハンドとを設ける。また、鋳型を、溶融した金が注入されて鋳込まれる鋳型本体と、鋳型本体の外壁面から垂直に外方に突出するように設けられた断面形状が四辺形である棒状の鋳型把手から構成し、鋳型把手にはロボットハンドの鋳型把手挟持手段の形状に適した形状を設ける。
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明は、金インゴット鋳造用ロボットハンドおよび該ロボットハンドで把持するのに適した鋳型に関する。
【0002】
【従来の技術】従来、比較的小さな金インゴットを溶解し鋳造する場合には、人手によって金塊を装入したルツボを1つずつ溶解炉で溶解し、これを鋳型に注入し、冷却した後に鋳型を反転させて金インゴットを取り出すという工程を採っている。
【0003】しかし、前述の従来例の方法では、作業性が悪く、また人手により行うので金インゴットの品質にバラツキが出る問題があった。この対策として、ロボットを用いて溶解および鋳造を自動的に行う方法が提案されている(例えば、特開平4−305359号公報、特開平1−239384号公報)。
【0004】
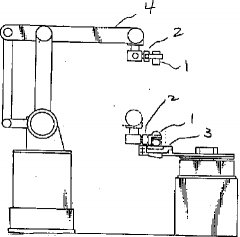
【発明が解決しようとする課題】図7は、前述の特開平1−305359号公報に提案されたロボットによる鋳型への鋳造を示す側面図である。図7に示すように、この公報の発明においては、ロボットアーム4に取付けられた1種類のロボットハンド2でルツボ1を把持し、溶解した金をルツボ1から鋳型3に注入するといった単純な作業を行っている。言い換えると、この公報の発明では、ルツボから鋳型への溶解した金の注入にしかロボットハンドが使用されていない。また、特開平4−305359号公報に提案された発明では、溶解した金を収容したルツボを把持するためのロボットハンドと鋳型の把手を把持するロボットハンドを交換しながら鋳造を行うことが開示されている。このようなロボットハンドの交換を行う場合には、これらのロボットハンドをロボットアームが届きうる場所に置き、ロボットとは別に、ロボットハンドの交換を行う装置を設置しなければならない問題があった。
【0005】ロボットハンドの交換を行う装置を設置する場合には、鋳造工程中の数多くの作業を1つのロボットにより自動化しよとすると、スペース的に制限されたり、各装置によりロボットが干渉されないようにするために、即ち、ロボットアームとロボットハンドが各作業を行うために複雑な動作を実行する際に、これらが各装置に衝突しないようにするために、ロボットおよび各装置を広いスペースに配置しなければならなくなる。このため、より大きなロボットが必要になり、コストも高くなり、また、ロボットハンドを交換する動作のために、ロボットアームおよびロボットハンドの動作が複雑になり、このために時間も余分にかかり、生産効率も低下するという問題があった。
【0006】また、溶解した金を鋳込んで凝固させて金インゴットを鋳造する鋳型に関しても、鋳型を確実に把持し、容易に取扱いうるようなロボットハンドは存在しなかった。なお、直接ロボットハンドで鋳型を把持しようとすると、大型のロボットハンドが必要となるといった問題があった。
【0007】したがって、本発明の第1の目的は、複数のロボットハンドを交換する必要がなく、1つのロボットアームに装着して金インゴットの鋳造工程の多数の作業、例えば、ルツボ供給、鋳型供給、鋳込み、離型、インゴットストック等の作業を自動化できる金インゴット鋳造用ロボットハンドを提供することにある。
【0008】本発明の第2の目的は、前述の形式の金インゴット鋳造用ロボットハンドで把持するのに適した構造を持つ鋳型を提供することにある。
【0009】
【課題を解決するための手段】前述の第1の目的を達成するために、本発明は、垂直面内で回転可能なロボット手首に取付けられた金インゴット鋳造用ロボットハンドにおいて、鋳型把手を挟持する鋳型把手挟持手段とルツボを挟持するルツボ挟持手段を有する開閉可能に取付けられた一対の棒状部材から構成された鋳型・ルツボ用ハンドと、インゴットを挟持するインゴット挟持手段を有するインゴット用ハンドとを有することを特徴とする金インゴット鋳造用ロボットハンドを採用するものである。
【0010】また、第2の目的を達成するために、本発明は、溶融した金が注入されて鋳込まれる鋳型本体と、鋳型本体の外壁面から垂直に外方に突出するように設けられた断面形状が四辺形である棒状の鋳型把手とを有し、該鋳型把手にはロボットハンドの鋳型把手挟持手段の形状に適した形状が設けられていることを特徴とする鋳型を採用するものである。
【0011】
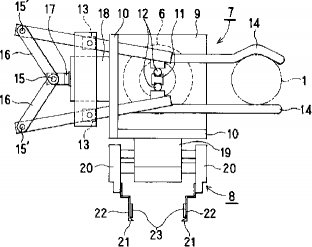
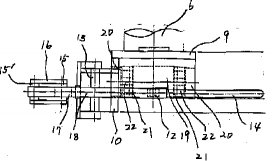
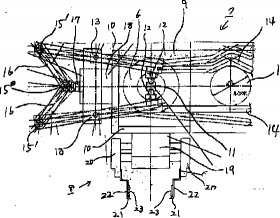
【実施例】次に、図面を参照して本発明の実施例を説明する。図1は金インゴット鋳造用ロボットハンドの正面図であり、図2はその平面図であり、図3はインゴット用ハンドの部分の側面図である。
【0012】図1〜図3において、ロボット手首6には保持部9が取付けられており、保持部9の側壁部10を介して鋳型・ルツボ用ハンド7がロボット手首に取付けられている。鋳型・ルツボ用ハンド7は、一対の棒状部材14を有し、各棒状部材14は、互いに向き合った状態で、固定軸13に回動可能に取付けられている。各棒状部材14は、その端部にルツボを挟持するための屈曲部を有し、またほぼ中間に鋳型の把手11を挟持するための円柱状挟持具12を有する。なお、棒状部材の一方は、図1に示すように、屈曲部の代わりに直線状であってもよい。また、各棒状部材14は、ルツボを挟持する屈曲部が設けられた端部とは反対側の端部に連結軸15’を介して連結棒16が回動可能に取付けられており、各連結棒16はエアシリンダ18のロッド17の端部にもうけられた1つの連結軸15に回動可能に取付けられている。図1から分かるように、エアシリンダ18を作動させてロッド17を延ばし、または縮めると、棒状部材14は固定軸13を中心に回動されることになるので、棒状部材14は開閉されることになる。そして、棒状部材14を閉じることによって、その円柱状挟持具12または屈曲部によって鋳型またはルツボを挟持するように構成されている。
【0013】保持部側壁部10には、インゴット用ハンド8が取付けられており、このインゴット用ハンド8は、エアシリンダを内蔵する平行チャック19を有し、この平行チャック19の両側には、この平行チャック19内のエアシリンダによって開閉される開閉板20がそれぞれ設けられている。各開閉板20の下端には段付きの板状挟持具22が取付けられており、この板状挟持具の下端には内方に突出する爪部21が形成されている。
【0014】図1から分かるように、板状挟持具22は、一対のチャックを構成しており、平行チャック内蔵のエアシリンダの作動によって、互いに接近しまたは互いに対して離れるように構成されており、このことによって、金インゴットを挟持し、または金インゴットを離すことができる。
【0015】金インゴットは概略寸法50mm×116mm×8mmの板状のインゴットであり、またその重量は約1kgである。板状挟持具22は、このような形状および重量の金インゴットを水平状態で、その最長辺を挟持するように、ロボット手首6の垂直な平面内でかつ棒状部材14の長手方向に開閉するようになっている。また、板状挟持具22の内側には、純度99,99%であるので表面が軟らかく傷付き易い金インゴットを挟持しても傷が発生しないようにするために、テフロンシート23(50mm×20mm×3mm)が取付けられている。
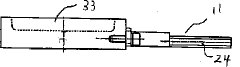
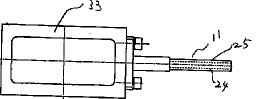
【0016】図4、図5および図6は、本発明の鋳型を示す正面図、平面図および側面図である。鋳型は、金インゴットとほぼ同じ寸法のくぼみを有する鋳型部33と、その1つの外側壁面に垂直に取付けられた鋳型把手11から成る。鋳型把手11は断面形状が四辺形の真っ直ぐな棒である。この鋳型把手11の両側面には、同一形状の真っ直ぐな溝、即ち角形切り欠き部24、25が形成されている。
【0017】一方、前述のように、鋳型・ルツボ用ハンド7の各棒状部材14の中間部には、円柱状挟持具12(寸法:10mmφ×57mm)が取付けられており、前述のように、一対の棒状部材14を閉じると、円柱状挟持具12の各々が鋳型把手11の溝、即ち切り欠き部24、25に部分的に嵌入し、把手11と円柱状挟持具12は、4本のライン上で接触することになる(図1参照)。このため、鋳型把手11は小さな力で強固に精度良く保持される。このため、重い金インゴットおよび鋳型(約5kg)を信頼性高く保持できる。また、保持した状態で、ロボット手首6を回転することができ、回転により、鋳型を上下を逆にすることによって鋳込んだ金インゴットを鋳型から再現性良く離型できる。
【0018】また、前述のようにこの棒状部材14は、鋳型把手ばかりでなく、屈曲部でルツボも挟持するように構成されている。ルツボが比較的脆いセラミックス質で形成されている場合には、棒状部材14でルツボを強く挟持し過ぎると、ルツボが破壊してしまい、一方鋳型把手を強く挟持しないと信頼性が損なわれる。このため、挟持する対象物によってエアシリンダ18を作動させる空気圧は圧力変換器(図示せず)によって変えられることが望ましい。そこで、好ましくは、ルツボを挟持する際には、1kg/cm2 の空気圧力で、また鋳型把手11を挟持する際には、3kg/cm2 の空気圧力で行なわれる。
【0019】また、前述のように、金インゴットは傷付き易いので、インゴット用ハンド8の平行チャック19に内蔵しているエアシリンダを動作させる空気圧は1kg/cm2 であることが望ましい。また、このように比較的低い空気圧で金インゴットを挟持するので、金インゴットが落下したり、傾いたりしないように、前述のように、板状挟持具22の下端には爪部(例えば高さ7mm)を設けると共に、板状挟持具22の幅を金インゴットの最長辺の少なくとも40%以上とすることが望ましい。
【0020】鋳型それ自体を直接挟持する方法では、ロボットハンドが大きくなってしまい、挟持する力も大きくならざるをえないが、本発明では、前述のように小さな円柱状挟持具12と円柱状挟持具に適合する特殊な形状に形成された鋳型把手を持つ鋳型を採用することによってロボットハンドを小型化と低重量化を行うことができ、したがって、ロボットの低コスト化が可能になった。また、この特殊形状の鋳型把手を有する鋳型を採用することにより、鋳型に鋳込んだ金インゴットを鋳型から反転することによって落下させる際に、落下距離を短くでき(鋳型を直接挟持する方法と比べて)、金インゴットの変形防止および表面の傷の発生の防止を行うことができる。
【0021】本発明のロボットハンドは、ルツボおよび鋳型の挟持機能に加えて、金インゴットを信頼性良く挟持するインゴット用ハンドも併設して3つの対象物に対する挟持機能を持つので、従来例のようなロボットハンドの交換作業、交換用の装置が不要となり、したがって、ロボットの作業範囲が小さくてよいので、ロボットの低コスト化が可能になった。
【0022】
【発明の効果】以上説明したように、本発明によれば、複数のハンドを交換することなく、1つのハンドに3つ対象物に対する挟持機能を設けたので、鋳造の多数の作業を短い時間で行うことができ、また使用するロボットの小型化、低コスト化を図れる。また傷付き易い金インゴットに傷を生じさせることなく、信頼性高くハンドリングすることができる。
【図面の簡単な説明】
【図1】図1は金インゴット鋳造用ロボットハンドの正面図である。
【図2】図2は金インゴット鋳造用ロボットハンドの平面図である。
【図3】図3は金インゴット鋳造用ロボットハンドの部分の側面図である。
【図4】図4は本発明の鋳型を示す正面図である。
【図5】図5は、鋳型の平面図である。
【図6】図6は、鋳型の側面図である。
【図7】図7は従来例のロボットによる鋳型への鋳造を示す側面図である。
【符号の説明】
1 ルツボ
2 ロボットハンド
4 ロボットアーム
6 ロボット手首
7 鋳型・ルツボ用ハンド
8 インゴット用ハンド
9 保持部
14 棒状部材
11 鋳型把手
12 円柱状挟持具
【0001】
【産業上の利用分野】本発明は、金インゴット鋳造用ロボットハンドおよび該ロボットハンドで把持するのに適した鋳型に関する。
【0002】
【従来の技術】従来、比較的小さな金インゴットを溶解し鋳造する場合には、人手によって金塊を装入したルツボを1つずつ溶解炉で溶解し、これを鋳型に注入し、冷却した後に鋳型を反転させて金インゴットを取り出すという工程を採っている。
【0003】しかし、前述の従来例の方法では、作業性が悪く、また人手により行うので金インゴットの品質にバラツキが出る問題があった。この対策として、ロボットを用いて溶解および鋳造を自動的に行う方法が提案されている(例えば、特開平4−305359号公報、特開平1−239384号公報)。
【0004】
【発明が解決しようとする課題】図7は、前述の特開平1−305359号公報に提案されたロボットによる鋳型への鋳造を示す側面図である。図7に示すように、この公報の発明においては、ロボットアーム4に取付けられた1種類のロボットハンド2でルツボ1を把持し、溶解した金をルツボ1から鋳型3に注入するといった単純な作業を行っている。言い換えると、この公報の発明では、ルツボから鋳型への溶解した金の注入にしかロボットハンドが使用されていない。また、特開平4−305359号公報に提案された発明では、溶解した金を収容したルツボを把持するためのロボットハンドと鋳型の把手を把持するロボットハンドを交換しながら鋳造を行うことが開示されている。このようなロボットハンドの交換を行う場合には、これらのロボットハンドをロボットアームが届きうる場所に置き、ロボットとは別に、ロボットハンドの交換を行う装置を設置しなければならない問題があった。
【0005】ロボットハンドの交換を行う装置を設置する場合には、鋳造工程中の数多くの作業を1つのロボットにより自動化しよとすると、スペース的に制限されたり、各装置によりロボットが干渉されないようにするために、即ち、ロボットアームとロボットハンドが各作業を行うために複雑な動作を実行する際に、これらが各装置に衝突しないようにするために、ロボットおよび各装置を広いスペースに配置しなければならなくなる。このため、より大きなロボットが必要になり、コストも高くなり、また、ロボットハンドを交換する動作のために、ロボットアームおよびロボットハンドの動作が複雑になり、このために時間も余分にかかり、生産効率も低下するという問題があった。
【0006】また、溶解した金を鋳込んで凝固させて金インゴットを鋳造する鋳型に関しても、鋳型を確実に把持し、容易に取扱いうるようなロボットハンドは存在しなかった。なお、直接ロボットハンドで鋳型を把持しようとすると、大型のロボットハンドが必要となるといった問題があった。
【0007】したがって、本発明の第1の目的は、複数のロボットハンドを交換する必要がなく、1つのロボットアームに装着して金インゴットの鋳造工程の多数の作業、例えば、ルツボ供給、鋳型供給、鋳込み、離型、インゴットストック等の作業を自動化できる金インゴット鋳造用ロボットハンドを提供することにある。
【0008】本発明の第2の目的は、前述の形式の金インゴット鋳造用ロボットハンドで把持するのに適した構造を持つ鋳型を提供することにある。
【0009】
【課題を解決するための手段】前述の第1の目的を達成するために、本発明は、垂直面内で回転可能なロボット手首に取付けられた金インゴット鋳造用ロボットハンドにおいて、鋳型把手を挟持する鋳型把手挟持手段とルツボを挟持するルツボ挟持手段を有する開閉可能に取付けられた一対の棒状部材から構成された鋳型・ルツボ用ハンドと、インゴットを挟持するインゴット挟持手段を有するインゴット用ハンドとを有することを特徴とする金インゴット鋳造用ロボットハンドを採用するものである。
【0010】また、第2の目的を達成するために、本発明は、溶融した金が注入されて鋳込まれる鋳型本体と、鋳型本体の外壁面から垂直に外方に突出するように設けられた断面形状が四辺形である棒状の鋳型把手とを有し、該鋳型把手にはロボットハンドの鋳型把手挟持手段の形状に適した形状が設けられていることを特徴とする鋳型を採用するものである。
【0011】
【実施例】次に、図面を参照して本発明の実施例を説明する。図1は金インゴット鋳造用ロボットハンドの正面図であり、図2はその平面図であり、図3はインゴット用ハンドの部分の側面図である。
【0012】図1〜図3において、ロボット手首6には保持部9が取付けられており、保持部9の側壁部10を介して鋳型・ルツボ用ハンド7がロボット手首に取付けられている。鋳型・ルツボ用ハンド7は、一対の棒状部材14を有し、各棒状部材14は、互いに向き合った状態で、固定軸13に回動可能に取付けられている。各棒状部材14は、その端部にルツボを挟持するための屈曲部を有し、またほぼ中間に鋳型の把手11を挟持するための円柱状挟持具12を有する。なお、棒状部材の一方は、図1に示すように、屈曲部の代わりに直線状であってもよい。また、各棒状部材14は、ルツボを挟持する屈曲部が設けられた端部とは反対側の端部に連結軸15’を介して連結棒16が回動可能に取付けられており、各連結棒16はエアシリンダ18のロッド17の端部にもうけられた1つの連結軸15に回動可能に取付けられている。図1から分かるように、エアシリンダ18を作動させてロッド17を延ばし、または縮めると、棒状部材14は固定軸13を中心に回動されることになるので、棒状部材14は開閉されることになる。そして、棒状部材14を閉じることによって、その円柱状挟持具12または屈曲部によって鋳型またはルツボを挟持するように構成されている。
【0013】保持部側壁部10には、インゴット用ハンド8が取付けられており、このインゴット用ハンド8は、エアシリンダを内蔵する平行チャック19を有し、この平行チャック19の両側には、この平行チャック19内のエアシリンダによって開閉される開閉板20がそれぞれ設けられている。各開閉板20の下端には段付きの板状挟持具22が取付けられており、この板状挟持具の下端には内方に突出する爪部21が形成されている。
【0014】図1から分かるように、板状挟持具22は、一対のチャックを構成しており、平行チャック内蔵のエアシリンダの作動によって、互いに接近しまたは互いに対して離れるように構成されており、このことによって、金インゴットを挟持し、または金インゴットを離すことができる。
【0015】金インゴットは概略寸法50mm×116mm×8mmの板状のインゴットであり、またその重量は約1kgである。板状挟持具22は、このような形状および重量の金インゴットを水平状態で、その最長辺を挟持するように、ロボット手首6の垂直な平面内でかつ棒状部材14の長手方向に開閉するようになっている。また、板状挟持具22の内側には、純度99,99%であるので表面が軟らかく傷付き易い金インゴットを挟持しても傷が発生しないようにするために、テフロンシート23(50mm×20mm×3mm)が取付けられている。
【0016】図4、図5および図6は、本発明の鋳型を示す正面図、平面図および側面図である。鋳型は、金インゴットとほぼ同じ寸法のくぼみを有する鋳型部33と、その1つの外側壁面に垂直に取付けられた鋳型把手11から成る。鋳型把手11は断面形状が四辺形の真っ直ぐな棒である。この鋳型把手11の両側面には、同一形状の真っ直ぐな溝、即ち角形切り欠き部24、25が形成されている。
【0017】一方、前述のように、鋳型・ルツボ用ハンド7の各棒状部材14の中間部には、円柱状挟持具12(寸法:10mmφ×57mm)が取付けられており、前述のように、一対の棒状部材14を閉じると、円柱状挟持具12の各々が鋳型把手11の溝、即ち切り欠き部24、25に部分的に嵌入し、把手11と円柱状挟持具12は、4本のライン上で接触することになる(図1参照)。このため、鋳型把手11は小さな力で強固に精度良く保持される。このため、重い金インゴットおよび鋳型(約5kg)を信頼性高く保持できる。また、保持した状態で、ロボット手首6を回転することができ、回転により、鋳型を上下を逆にすることによって鋳込んだ金インゴットを鋳型から再現性良く離型できる。
【0018】また、前述のようにこの棒状部材14は、鋳型把手ばかりでなく、屈曲部でルツボも挟持するように構成されている。ルツボが比較的脆いセラミックス質で形成されている場合には、棒状部材14でルツボを強く挟持し過ぎると、ルツボが破壊してしまい、一方鋳型把手を強く挟持しないと信頼性が損なわれる。このため、挟持する対象物によってエアシリンダ18を作動させる空気圧は圧力変換器(図示せず)によって変えられることが望ましい。そこで、好ましくは、ルツボを挟持する際には、1kg/cm2 の空気圧力で、また鋳型把手11を挟持する際には、3kg/cm2 の空気圧力で行なわれる。
【0019】また、前述のように、金インゴットは傷付き易いので、インゴット用ハンド8の平行チャック19に内蔵しているエアシリンダを動作させる空気圧は1kg/cm2 であることが望ましい。また、このように比較的低い空気圧で金インゴットを挟持するので、金インゴットが落下したり、傾いたりしないように、前述のように、板状挟持具22の下端には爪部(例えば高さ7mm)を設けると共に、板状挟持具22の幅を金インゴットの最長辺の少なくとも40%以上とすることが望ましい。
【0020】鋳型それ自体を直接挟持する方法では、ロボットハンドが大きくなってしまい、挟持する力も大きくならざるをえないが、本発明では、前述のように小さな円柱状挟持具12と円柱状挟持具に適合する特殊な形状に形成された鋳型把手を持つ鋳型を採用することによってロボットハンドを小型化と低重量化を行うことができ、したがって、ロボットの低コスト化が可能になった。また、この特殊形状の鋳型把手を有する鋳型を採用することにより、鋳型に鋳込んだ金インゴットを鋳型から反転することによって落下させる際に、落下距離を短くでき(鋳型を直接挟持する方法と比べて)、金インゴットの変形防止および表面の傷の発生の防止を行うことができる。
【0021】本発明のロボットハンドは、ルツボおよび鋳型の挟持機能に加えて、金インゴットを信頼性良く挟持するインゴット用ハンドも併設して3つの対象物に対する挟持機能を持つので、従来例のようなロボットハンドの交換作業、交換用の装置が不要となり、したがって、ロボットの作業範囲が小さくてよいので、ロボットの低コスト化が可能になった。
【0022】
【発明の効果】以上説明したように、本発明によれば、複数のハンドを交換することなく、1つのハンドに3つ対象物に対する挟持機能を設けたので、鋳造の多数の作業を短い時間で行うことができ、また使用するロボットの小型化、低コスト化を図れる。また傷付き易い金インゴットに傷を生じさせることなく、信頼性高くハンドリングすることができる。
【図面の簡単な説明】
【図1】図1は金インゴット鋳造用ロボットハンドの正面図である。
【図2】図2は金インゴット鋳造用ロボットハンドの平面図である。
【図3】図3は金インゴット鋳造用ロボットハンドの部分の側面図である。
【図4】図4は本発明の鋳型を示す正面図である。
【図5】図5は、鋳型の平面図である。
【図6】図6は、鋳型の側面図である。
【図7】図7は従来例のロボットによる鋳型への鋳造を示す側面図である。
【符号の説明】
1 ルツボ
2 ロボットハンド
4 ロボットアーム
6 ロボット手首
7 鋳型・ルツボ用ハンド
8 インゴット用ハンド
9 保持部
14 棒状部材
11 鋳型把手
12 円柱状挟持具
【特許請求の範囲】
【請求項1】 垂直面内で回転可能なロボット手首に取付けられた金インゴット鋳造用ロボットハンドにおいて、鋳型把手を挟持する鋳型把手挟持手段とルツボを挟持するルツボ挟持手段を有する開閉可能に取付けられた一対の棒状部材から構成された鋳型・ルツボ用ハンドと、インゴットを挟持するインゴット挟持手段を有するインゴット用ハンドとを有することを特徴とする金インゴット鋳造用ロボットハンド。
【請求項2】 請求項1記載の金インゴット鋳造用ロボットハンドにおいて、前記鋳型把手挟持手段は前記一対の棒状部材の各々のほぼ中央の内側に設けられた円柱状挟持具であることを特徴とする金インゴット鋳造用ロボットハンド。
【請求項3】 請求項1記載の金インゴット鋳造用ロボットハンドにおいて、前記ルツボ挟持手段は前記一対の棒状部材の各々の端部に設けられた屈曲部であることを特徴とする金インゴット鋳造用ロボットハンド。
【請求項4】 請求項1記載の金インゴット鋳造用ロボットハンドにおいて、前記一対の棒状部材の開閉は、エアシリンダの動作によって行われ、エアシリンダの空気圧が鋳型把手を挟持するときとルツボを挟持するときによって切り替えられることを特徴とする金インゴット鋳造用ロボットハンド。
【請求項5】 請求項1記載の金インゴット鋳造用ロボットハンドにおいて、前記インゴット挟持手段は、インゴットを挟持するように開閉する一対の板状挟持具を有することを特徴とする金インゴット鋳造用ロボットハンド。
【請求項6】 請求項5記載の金インゴット鋳造用ロボットハンドにおいて、前記一対の板状挟持具の各々の下端には爪部が形成されていることを特徴とする金インゴット鋳造用ロボットハンド。
【請求項7】 請求項5記載の金インゴット鋳造用ロボットハンドにおいて、前記一対の板状挟持具の各々の金インゴットを挟持する部分にはテフロン(登録商標)シートが張り付けられていることを特徴とする金インゴット鋳造用ロボットハンド。
【請求項8】 溶融した金が注入されて鋳込まれる鋳型本体と、鋳型本体の外壁面から垂直に外方に突出するように設けられた断面形状が四辺形である棒状の鋳型把手とを有し、該鋳型把手にはロボットハンドの鋳型把手挟持手段の形状に適した形状が設けられていることを特徴とする鋳型。
【請求項9】 請求項8記載の鋳型において、ロボットハンドの前記鋳型把手挟持手段が一対の棒状部材の各々のほぼ中央の内側に設けられた円柱状挟持具であるとき、前記鋳型把手には、円柱状挟持具によって挟持される部分に、溝が形成されていることを特徴とする鋳型。
【請求項1】 垂直面内で回転可能なロボット手首に取付けられた金インゴット鋳造用ロボットハンドにおいて、鋳型把手を挟持する鋳型把手挟持手段とルツボを挟持するルツボ挟持手段を有する開閉可能に取付けられた一対の棒状部材から構成された鋳型・ルツボ用ハンドと、インゴットを挟持するインゴット挟持手段を有するインゴット用ハンドとを有することを特徴とする金インゴット鋳造用ロボットハンド。
【請求項2】 請求項1記載の金インゴット鋳造用ロボットハンドにおいて、前記鋳型把手挟持手段は前記一対の棒状部材の各々のほぼ中央の内側に設けられた円柱状挟持具であることを特徴とする金インゴット鋳造用ロボットハンド。
【請求項3】 請求項1記載の金インゴット鋳造用ロボットハンドにおいて、前記ルツボ挟持手段は前記一対の棒状部材の各々の端部に設けられた屈曲部であることを特徴とする金インゴット鋳造用ロボットハンド。
【請求項4】 請求項1記載の金インゴット鋳造用ロボットハンドにおいて、前記一対の棒状部材の開閉は、エアシリンダの動作によって行われ、エアシリンダの空気圧が鋳型把手を挟持するときとルツボを挟持するときによって切り替えられることを特徴とする金インゴット鋳造用ロボットハンド。
【請求項5】 請求項1記載の金インゴット鋳造用ロボットハンドにおいて、前記インゴット挟持手段は、インゴットを挟持するように開閉する一対の板状挟持具を有することを特徴とする金インゴット鋳造用ロボットハンド。
【請求項6】 請求項5記載の金インゴット鋳造用ロボットハンドにおいて、前記一対の板状挟持具の各々の下端には爪部が形成されていることを特徴とする金インゴット鋳造用ロボットハンド。
【請求項7】 請求項5記載の金インゴット鋳造用ロボットハンドにおいて、前記一対の板状挟持具の各々の金インゴットを挟持する部分にはテフロン(登録商標)シートが張り付けられていることを特徴とする金インゴット鋳造用ロボットハンド。
【請求項8】 溶融した金が注入されて鋳込まれる鋳型本体と、鋳型本体の外壁面から垂直に外方に突出するように設けられた断面形状が四辺形である棒状の鋳型把手とを有し、該鋳型把手にはロボットハンドの鋳型把手挟持手段の形状に適した形状が設けられていることを特徴とする鋳型。
【請求項9】 請求項8記載の鋳型において、ロボットハンドの前記鋳型把手挟持手段が一対の棒状部材の各々のほぼ中央の内側に設けられた円柱状挟持具であるとき、前記鋳型把手には、円柱状挟持具によって挟持される部分に、溝が形成されていることを特徴とする鋳型。
【図2】


【図3】

【図4】
【図1】
【図5】
【図6】

【図7】
【図3】
【図4】
【図1】
【図5】
【図6】
【図7】
【公開番号】特開平7−16738
【公開日】平成7年(1995)1月20日
【国際特許分類】
【出願番号】特願平5−187406
【出願日】平成5年(1993)6月30日
【出願人】(000183303)住友金属鉱山株式会社 (2,015)
【公開日】平成7年(1995)1月20日
【国際特許分類】
【出願日】平成5年(1993)6月30日
【出願人】(000183303)住友金属鉱山株式会社 (2,015)
[ Back to top ]