
金属ストリップのサイドガイドを制御する方法
【解決手段】 本発明は、特にロールスタンドまたは駆動装置の入側または出側内における、金属ストリップ1のサイドガイドを制御する方法に関し、その際、上記サイドガイドが、金属ストリップ1の一方の側面の上に、第1のガイド2を備えており、および、他方の側面の上に、第2のガイド4を備えており、その際、これらガイド2、4が、互いに依存せずに移動され得、且つ、それぞれに、位置制御された状態で作動され、且つ、その際、第1のガイド2と第2のガイド4に対して作用する、金属ストリップ1の力K1、K2が測定され、および、第1の、及び/または第2のガイド2、4のための目標位置S1、S2が、第1の、および第2のガイド2、4において測定された力K1、K2に依存して、それぞれに、第1のガイド2、および第2のガイド4において測定された力K1、K2の内のより小さな値K′が、選択可能な下側の限界力の上側に、および、選択可能な上側の限界力の下側に存在するように制御される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、特に圧延設備内における、例えばロールスタンドまたは駆動装置の入側または出側内における、または同様に他のストリッププロセスライン内における、金属ストリップのサイドガイドを制御する方法に関する。
【背景技術】
【0002】
従来技術から、既に、金属ストリップのサイドガイドを制御する方法は公知である。
このようなサイドガイドは、一般的に、2つの、ストリップの道程に対して側方に設けられたガイドから成り、これらガイドが、液圧シリンダーでもって位置決めされ、且つ、ストリップの通過の際に、このストリップに対して押付けられ、即ち圧接され得る。
しばしば、この公知のシステムは、両方のガイドの機械的な連結装置、並びにこれらガイドの位置調節のための共通の制御装置を有している。
この様式のガイドは、比較的に簡単に構想されるが、しかしながら、これらガイドの位置調節可能性、および特にこれらガイドの制御は、極めて制限されている。全てのストリップ経過(Bandverlaeufe)は、十分に修正され得ない。金属ストリップおよびガイドにおける損傷は、依然として十分に回避され得ない。
【0003】
更に、諸方法が公知であり、これらの方法の場合、ストリップの案内の間じゅう、一方のガイドが位置制御された状態で作動され、これに対して、他方のガイドが、所定の力でもって、ストリップに対して押付けられる。
ガイドとストリップとの間の押圧力の決定(Bestimmung)は、この方法の場合、両方の側面のために実施される。ストリップの案内の間じゅう、その場合に、一方の側面の上のガイドは、位置制御された状態で、不動(festen)の位置で保持される。他方のガイドは、力制御された状態で、所定の力でもって、このストリップに対して押付けられる。
力制御されたガイドの目標力は、材料、幅、厚さ、温度、または速度のような、案内されるべきストリップの特性に依存して、不動に予め設定される。この目標力は、この目標力が、如何なる場合においても、力制御された側面に対するストリップの接触力よりも大きいように選択される。何故ならば、さもなければ、この側面の上での案内がストリップから開放され得るからである。
この方法の欠点は、ストリップが位置制御された側面に対して力を及ぼす場合、この側面の上で、反力と同様に、付加的に、力制御された側面の予め設定された力も収容されねばならないことにある。
この結果は、ストリップ、およびガイドにおける損傷である。ガイドの修理のために、従って、長い設備停止が不可避である。それに加えて、この方法の更に別の欠点は、案内されるべきストリップの幅が、一般的に、一定でないことから与えられる。
案内されるべきストリップの幅に依存しない、不動の目標力のプリセットによって、これらガイドは、適当に、異なるストリップ幅経過に対して圧接され得ず、このことによって、この案内が、一番うまくいった場合でも不十分であり、または、著しい損傷が生じる程に高い力がストリップとガイドとの間で作用する。
【0004】
特許文献1は、更に別の金属ストリップをサイドガイドするための方法を開示している。この開示された方法の課題は、ローラーテーブル内における案内ガイドの耐用期間を増大することである。この目的のために、案内ガイドの制御が提案され、この制御は、これら案内ガイドが、交互に、ストリップ縁部に対して押付け可能であり、且つ再びこれらストリップ縁部から持上げ可能であるように作動する。
この方法において、力制御回路のための目標値が、プロセス計算機によって、1つのインプットに従って予め設定され、且つこのことによって、制御が、多くの場合に、十分に精確に行われ得ないことは特に欠点である。この予め設定された目標力によって、この方法は、同様に上記の欠点を有しており、従って、この方法によって、案内ガイドは、依然として不満足に迅速に摩耗し、且つそれに加えて、重大なストリップ縁部の損傷を生じる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】ドイツ連邦共和国特許出願公開第40 03 717 A1号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来技術から与えられる技術的な課題は、従って、金属ストリップをサイドガイドするための改善された制御方法を提供すること、または、上記欠点の内の少なくとも1つの欠点を回避することにある。
【課題を解決するための手段】
【0007】
上記の技術的な課題は、金属ストリップのサイドガイドを制御する、本発明に従う方法によって解決され、その際、
上記サイドガイドが、金属ストリップの一方の側面の上に、第1のガイドを備えており、および、他方の側面の上に、第2のガイドを備えており、
その際、これらガイドが、互いに依存せずに移動され得、且つ、
それぞれに、位置制御された状態で作動され、且つ、
その際、第1のガイドと第2のガイドに対して作用する、金属ストリップの力が測定され、
および、本発明に従い、
第1の、及び/または第2のガイドのための目標位置が、
第1の、および第2のガイドにおいて測定された力に依存して、
それぞれに、第1のガイド、および第2のガイドにおいて測定された力の内のより小さな値が、選択可能な下側の限界力の上側に、および、選択可能な上側の限界力の下側に存在するように制御される。
両方のガイドが、互いに依存せずに、位置制御された状態で作動されることによって、および、これらガイドにおいて測定された力が、目標位置の決定のために、上記のように使用されることによって、これらガイドにおける損傷は低減される。特に、動きの重い案内の場合、本発明に従う制御は、有利であることは明らかである。
本発明に従う制御は、それに加えて、ストリップの幅変動が生じる場合に特に有利である。
【発明の効果】
【0008】
本発明に従う方法の有利な実施形態において、上側の限界力は下側の限界力よりも大きい。
更に、この実施形態は、
第1のガイド、および第2のガイドにおいて測定された力の内のより小さな値が、下側の限界力を下回る場合、
第1の、及び/または第2のガイドのための位置が、第1の、および第2のガイドにおいて測定された力が増大されるように位置調節されることの特徴を有している。
更に、第1のガイド、および第2のガイドにおいて測定された力の内のより小さな値が、上側の限界力を上回る場合、
第1の、及び/または第2のガイドのための位置が、第1の、および第2のガイドにおいて測定された力が減少されるように位置調節される、
ことは有効である。
上記制御が、このように経過する場合、ストリップとガイドとの間の力は、特に効果的に低減され、このことによって、ガイドの摩耗が低減され、且つ、これらガイドにおける損傷が更により有効に低減される。
【0009】
本発明に従う方法の更に有利な実施形態において、測定された力は、ローパスフィルターでもってフィルターされる。
このローパスフィルターによって、この方法は、高い信頼性でおよび不敏感に作動可能である。しばしば妨害(Stoerungen)に起因する高い周波数は、従って、フィルターで除去可能である。
【0010】
本発明に従う方法の更なる実施形態において、
第1の、および第2のガイドは、駆動装置によって駆動され、且つ、これら駆動装置内の1つの駆動装置の駆動が、選択的に、液圧的にまたは空気圧的に行われる。
【0011】
本発明に従う方法の更なる実施形態において、
これら液圧的または空気圧的な駆動装置は、2つのシリンダー室を備えており、および、
第1の、または第2のガイドに対して作用する力が、これらシリンダー室内において測定された圧力から決定される。
【0012】
本発明に従う方法の更なる実施形態において、
第1の、および第2のガイドは、駆動装置によって駆動され、その際、これら駆動装置内の1つの駆動装置の駆動が、選択的に、電気的なリニアモータによって行われる。
【0013】
本発明に従う方法の更なる実施形態において、
第1の、または第2のガイドに対して作用する力は、リニアモータの測定された、電気的な大きさから決定される。
【0014】
本発明に従う方法の更なる実施形態において、
第1の、および第2のガイドは、駆動装置によって駆動され、その際、
これら駆動装置内の1つの駆動装置の駆動が、回転式のモータおよびスピンドル伝動装置を介して行われ、およびその際、
この回転式のモータが、選択的に、液圧的にまたは空気圧的に駆動される。
【0015】
次に、簡潔に、実施例の図を説明する。更なる詳細は、実施例の詳細な説明から見て取れる。
【図面の簡単な説明】
【0016】
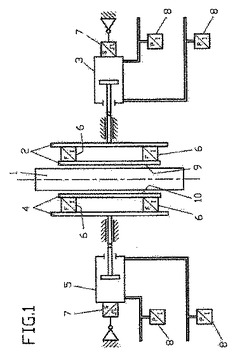
【図1】調節および制御機構を共に描いた、金属ストリップのサイドガイドの概略図である。
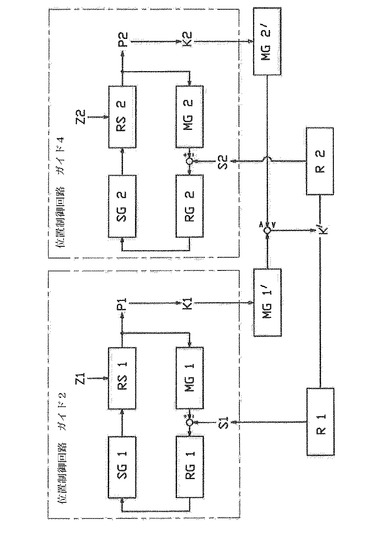
【図2】制御図である。
【発明を実施するための形態】
【0017】
図1内において、本発明に従う方法を実施するための配設の一つの実施例が図示されている。
金属ストリップ1、有利には鋼ストリップ1は、この金属ストリップの両方の側面、即ち長手方向側面で、サイドガイドによって案内されている。このような、自体公知のサイドガイドは、それぞれに1つのガイド2、4を備えている。
この金属ストリップ1は、その際、ガイド2、4の案内縁部9、10によって接触可能である。これらガイド2、4は、有利には、側方から、金属ストリップ1に対して、駆動装置、即ち圧接装置3、5によって圧接されている。
図1内において図示されているように、ガイド2、4の、案内縁部9、10と、駆動装置、即ち圧接装置3、5との間に、力測定器6が設けられていることは選択的に可能である。
同様に、ガイド2、4が、図示されているように、その目的のために、多部材より成るように形成されていることも可能である。これら圧接装置3、5は、例えば、図示されているように、液圧−、または空気圧シリンダーによって形成されている。
更に、図1に従って、位置測定器7が設けられており、これら位置測定器は、圧接装置3、5内におけるピストンの移動道程を測定可能である。選択的に、他の位置測定器7を、例えば、これら位置測定器が直接的にガイド2、4との接触状態においてガイドの位置を決定するように、設けることは、同様に可能である。
同様に、例えば電磁波の助力でもってのように、非接触の位置測定も可能であり、且つ有利である。
更に、図1内において、圧力測定機器8、即ち圧力測定器8が図示されており、これら圧力測定機器が、ピストンシリンダーユニット3、5内において、圧力値を測定可能である。これらの値から、公知の処理方法に従って、ガイド2、4に対して作用する、力K1、K2が推量(geschlossen)され得る。
選択的に、同様に、1つのモータ3、5、特に1つの回転モータでもっての1つの駆動装置の場合、このモータの駆動トルクが、ガイド2、4に対する力を決定するために使用され得る。
【0018】
図2内において、制御回路図が図示されており、この制御回路図は、全く例示的に、本発明に従う方法を明瞭に示している。
この図2の左側に、第1のガイド2のための位置制御回路が示されており、この右側に、第2のガイド4のための位置制御回路が示されている。この第1のガイド2のための位置制御回路によって、このガイド2は、目標位置S1において保持されるべきである。
実際上は、ストリップ1の圧力の様式における妨害Z1が、制御回路の制御区間RS1に対して、即ちガイド2に対して作用する。この妨害によって、第1のガイドの、結果として生じる位置P1が与えられ、この位置は、測定要素MG1によって決定され得る。
このような測定要素は、例えば、位置測定器7であることは可能である。
この測定された値は、次いで、ガイド2の位置の目標値S1と比較される。位置P1の実際値とこの位置P1の目標値との間に差がある場合、この相違は、制御要素RG1によって、位置調節要素SG1のための情報に変換される。
この位置調節要素SG1は、有利には、図1における圧接装置3、5内の1つの圧接装置によって形成されている。選択的に、実際上は、同様に、電気的なまたは回転的なモータも考慮の対象となる。この位置調節要素SG1は、要するに、再び、制御区間RS1、即ちガイド2を、およびこのガイド2の位置を調節する。
【0019】
上記で説明した制御回路に類似して、ガイド4、即ち第2のガイド4の位置制御回路は作動する。
このガイド4の位置の制御区間RS2に、妨害Z2、即ち金属ストリップ1の圧力が作用する。総じて、このガイド4の位置P2は、調節される。
この位置P2は、測定要素MG2によって測定され得る。次いで、この測定された位置P2は、このガイド4の目標位置S2と比較される。これら両方の値の間の存在する差は、制御要素RG2に引き渡される。
この制御要素RG2は、制御技術において通例のように、位置調節要素SG2に対して位置調節値を出力し、この位置調節要素が、従って、制御区間RS2を調節し、このことによって、制御回路が閉鎖される。
【0020】
本発明に従い、金属ストリップ1の両方の側面に対する位置制御に対して付加的に、同様に、ガイド2、4に対して作用する力も測定される。このことは、特に、それぞれの位置P1に対して、力K1が存在すること、および、それぞれの位置P2に対して、力K2が存在することを意味する。
これら力K1、K2は、同様に、図2内において、図式的に記号を付けられており、且つ、それぞれに、測定要素MG1′およびMG2′によって測定される。これら測定要素MG1′およびMG2′は、有利には、力測定器6または圧力測定器8によって形成されている。
【0021】
本発明に従う方法の次のステップにおいて、第1のガイド2において測定された力K1は、第2のガイド4において測定された力K2と互いに比較され、その際、これら両方の力K1、K2の内のより小さな力−以下で力K′と称される−が、有利には、制御器、即ち制御装置R1及び/またはR2に引き渡される。
K1がより小さな力であり、且つ従って、力K′に相応する場合、このより小さな力は制御器R1に引き渡され、この制御器が、変更された目標値S1を、第1のガイド2の位置のためにアウトプットする。この第1のガイド2の位置のための、力測定器によって修正された目標値(目標位置)S1は、次いで、この第1のガイド2の制御回路の更新された過程の際に、第1のガイド2の測定された位置値と比較される。
K2が、力K1およびK2の内のより小さな力である場合、この力K2、即ち力K′は、制御器R2に供給される。この制御器R2は、それ自身、ここで、新しい位置目標値S2を、第2のガイド4の位置のためにアウトプットする。
【0022】
値K′が、両方の制御器R1およびR2に引き渡されること、および、
これら両方の制御器R1およびR2が、測定された力値K′に相応して、それら位置制御回路に、新しい目標値S1およびS2を割り当てること、は同様に可能である。
有利には、目標値S1およびS2は、測定された力K1、K2、即ち接触力K1、K2内のより小さな力が、予め設定可能な下側の限界、即ち限界力と、予め設定可能な上側の限界、即ち限界力との間に存在するように、制御器R1およびR2によってアウトプットされる。
【0023】
この下側の限界は、その際有利には、システムの摩擦(Reibung)、即ちストリップ1の摩擦が克服され得、且つ従って、制御が、常にストリップ1の運動を調節することが可能なように選択される。この上側の限界は、有利には、例えば生じる摩擦力のような、設備パラメータによって定められ、または、同様に、それぞれの設備に応じて、所望された測定精度に依存することも可能である。
【符号の説明】
【0024】
1 金属ストリップ
2 第1のガイド
3 第1の圧接装置
4 第2のガイド
5 第2の圧接装置
6 力測定器
7 位置測定器
8 圧力測定器
9 第1の案内縁部
10 第2の案内縁部
K1 第1のガイドに存在する力
K2 第2のガイドに存在する力
K′ 測定された力K1、K2の内のより小さな力
MG1 第1のガイドの位置測定機器
MG2 第2のガイドの位置測定機器
MG1′ 第1のガイドの力測定機器
MG2′ 第2のガイドの力測定機器
P1 第1のガイドの位置
P2 第2のガイドの位置
R1 第1のガイドのための位置目標値S1のアウトプットのための制御器
R2 第2のガイドのための位置目標値S2のアウトプットのための制御器
RG1 第1のガイドの位置制御回路の制御要素
RG2 第2のガイドの位置制御回路の制御要素
RS1 第1のガイドの位置制御回路の制御区間
RS2 第2のガイドの位置制御回路の制御区間
S1 第1のガイドの位置のための目標値
S2 第2のガイドの位置のための目標値
SG1 第1のガイドの位置制御回路の位置調節要素
SG2 第2のガイドの位置制御回路の位置調節要素
Z1 第1のガイドの位置制御回路の妨害
Z2 第2のガイドの位置制御回路の妨害
【技術分野】
【0001】
本発明は、特に圧延設備内における、例えばロールスタンドまたは駆動装置の入側または出側内における、または同様に他のストリッププロセスライン内における、金属ストリップのサイドガイドを制御する方法に関する。
【背景技術】
【0002】
従来技術から、既に、金属ストリップのサイドガイドを制御する方法は公知である。
このようなサイドガイドは、一般的に、2つの、ストリップの道程に対して側方に設けられたガイドから成り、これらガイドが、液圧シリンダーでもって位置決めされ、且つ、ストリップの通過の際に、このストリップに対して押付けられ、即ち圧接され得る。
しばしば、この公知のシステムは、両方のガイドの機械的な連結装置、並びにこれらガイドの位置調節のための共通の制御装置を有している。
この様式のガイドは、比較的に簡単に構想されるが、しかしながら、これらガイドの位置調節可能性、および特にこれらガイドの制御は、極めて制限されている。全てのストリップ経過(Bandverlaeufe)は、十分に修正され得ない。金属ストリップおよびガイドにおける損傷は、依然として十分に回避され得ない。
【0003】
更に、諸方法が公知であり、これらの方法の場合、ストリップの案内の間じゅう、一方のガイドが位置制御された状態で作動され、これに対して、他方のガイドが、所定の力でもって、ストリップに対して押付けられる。
ガイドとストリップとの間の押圧力の決定(Bestimmung)は、この方法の場合、両方の側面のために実施される。ストリップの案内の間じゅう、その場合に、一方の側面の上のガイドは、位置制御された状態で、不動(festen)の位置で保持される。他方のガイドは、力制御された状態で、所定の力でもって、このストリップに対して押付けられる。
力制御されたガイドの目標力は、材料、幅、厚さ、温度、または速度のような、案内されるべきストリップの特性に依存して、不動に予め設定される。この目標力は、この目標力が、如何なる場合においても、力制御された側面に対するストリップの接触力よりも大きいように選択される。何故ならば、さもなければ、この側面の上での案内がストリップから開放され得るからである。
この方法の欠点は、ストリップが位置制御された側面に対して力を及ぼす場合、この側面の上で、反力と同様に、付加的に、力制御された側面の予め設定された力も収容されねばならないことにある。
この結果は、ストリップ、およびガイドにおける損傷である。ガイドの修理のために、従って、長い設備停止が不可避である。それに加えて、この方法の更に別の欠点は、案内されるべきストリップの幅が、一般的に、一定でないことから与えられる。
案内されるべきストリップの幅に依存しない、不動の目標力のプリセットによって、これらガイドは、適当に、異なるストリップ幅経過に対して圧接され得ず、このことによって、この案内が、一番うまくいった場合でも不十分であり、または、著しい損傷が生じる程に高い力がストリップとガイドとの間で作用する。
【0004】
特許文献1は、更に別の金属ストリップをサイドガイドするための方法を開示している。この開示された方法の課題は、ローラーテーブル内における案内ガイドの耐用期間を増大することである。この目的のために、案内ガイドの制御が提案され、この制御は、これら案内ガイドが、交互に、ストリップ縁部に対して押付け可能であり、且つ再びこれらストリップ縁部から持上げ可能であるように作動する。
この方法において、力制御回路のための目標値が、プロセス計算機によって、1つのインプットに従って予め設定され、且つこのことによって、制御が、多くの場合に、十分に精確に行われ得ないことは特に欠点である。この予め設定された目標力によって、この方法は、同様に上記の欠点を有しており、従って、この方法によって、案内ガイドは、依然として不満足に迅速に摩耗し、且つそれに加えて、重大なストリップ縁部の損傷を生じる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】ドイツ連邦共和国特許出願公開第40 03 717 A1号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来技術から与えられる技術的な課題は、従って、金属ストリップをサイドガイドするための改善された制御方法を提供すること、または、上記欠点の内の少なくとも1つの欠点を回避することにある。
【課題を解決するための手段】
【0007】
上記の技術的な課題は、金属ストリップのサイドガイドを制御する、本発明に従う方法によって解決され、その際、
上記サイドガイドが、金属ストリップの一方の側面の上に、第1のガイドを備えており、および、他方の側面の上に、第2のガイドを備えており、
その際、これらガイドが、互いに依存せずに移動され得、且つ、
それぞれに、位置制御された状態で作動され、且つ、
その際、第1のガイドと第2のガイドに対して作用する、金属ストリップの力が測定され、
および、本発明に従い、
第1の、及び/または第2のガイドのための目標位置が、
第1の、および第2のガイドにおいて測定された力に依存して、
それぞれに、第1のガイド、および第2のガイドにおいて測定された力の内のより小さな値が、選択可能な下側の限界力の上側に、および、選択可能な上側の限界力の下側に存在するように制御される。
両方のガイドが、互いに依存せずに、位置制御された状態で作動されることによって、および、これらガイドにおいて測定された力が、目標位置の決定のために、上記のように使用されることによって、これらガイドにおける損傷は低減される。特に、動きの重い案内の場合、本発明に従う制御は、有利であることは明らかである。
本発明に従う制御は、それに加えて、ストリップの幅変動が生じる場合に特に有利である。
【発明の効果】
【0008】
本発明に従う方法の有利な実施形態において、上側の限界力は下側の限界力よりも大きい。
更に、この実施形態は、
第1のガイド、および第2のガイドにおいて測定された力の内のより小さな値が、下側の限界力を下回る場合、
第1の、及び/または第2のガイドのための位置が、第1の、および第2のガイドにおいて測定された力が増大されるように位置調節されることの特徴を有している。
更に、第1のガイド、および第2のガイドにおいて測定された力の内のより小さな値が、上側の限界力を上回る場合、
第1の、及び/または第2のガイドのための位置が、第1の、および第2のガイドにおいて測定された力が減少されるように位置調節される、
ことは有効である。
上記制御が、このように経過する場合、ストリップとガイドとの間の力は、特に効果的に低減され、このことによって、ガイドの摩耗が低減され、且つ、これらガイドにおける損傷が更により有効に低減される。
【0009】
本発明に従う方法の更に有利な実施形態において、測定された力は、ローパスフィルターでもってフィルターされる。
このローパスフィルターによって、この方法は、高い信頼性でおよび不敏感に作動可能である。しばしば妨害(Stoerungen)に起因する高い周波数は、従って、フィルターで除去可能である。
【0010】
本発明に従う方法の更なる実施形態において、
第1の、および第2のガイドは、駆動装置によって駆動され、且つ、これら駆動装置内の1つの駆動装置の駆動が、選択的に、液圧的にまたは空気圧的に行われる。
【0011】
本発明に従う方法の更なる実施形態において、
これら液圧的または空気圧的な駆動装置は、2つのシリンダー室を備えており、および、
第1の、または第2のガイドに対して作用する力が、これらシリンダー室内において測定された圧力から決定される。
【0012】
本発明に従う方法の更なる実施形態において、
第1の、および第2のガイドは、駆動装置によって駆動され、その際、これら駆動装置内の1つの駆動装置の駆動が、選択的に、電気的なリニアモータによって行われる。
【0013】
本発明に従う方法の更なる実施形態において、
第1の、または第2のガイドに対して作用する力は、リニアモータの測定された、電気的な大きさから決定される。
【0014】
本発明に従う方法の更なる実施形態において、
第1の、および第2のガイドは、駆動装置によって駆動され、その際、
これら駆動装置内の1つの駆動装置の駆動が、回転式のモータおよびスピンドル伝動装置を介して行われ、およびその際、
この回転式のモータが、選択的に、液圧的にまたは空気圧的に駆動される。
【0015】
次に、簡潔に、実施例の図を説明する。更なる詳細は、実施例の詳細な説明から見て取れる。
【図面の簡単な説明】
【0016】
【図1】調節および制御機構を共に描いた、金属ストリップのサイドガイドの概略図である。
【図2】制御図である。
【発明を実施するための形態】
【0017】
図1内において、本発明に従う方法を実施するための配設の一つの実施例が図示されている。
金属ストリップ1、有利には鋼ストリップ1は、この金属ストリップの両方の側面、即ち長手方向側面で、サイドガイドによって案内されている。このような、自体公知のサイドガイドは、それぞれに1つのガイド2、4を備えている。
この金属ストリップ1は、その際、ガイド2、4の案内縁部9、10によって接触可能である。これらガイド2、4は、有利には、側方から、金属ストリップ1に対して、駆動装置、即ち圧接装置3、5によって圧接されている。
図1内において図示されているように、ガイド2、4の、案内縁部9、10と、駆動装置、即ち圧接装置3、5との間に、力測定器6が設けられていることは選択的に可能である。
同様に、ガイド2、4が、図示されているように、その目的のために、多部材より成るように形成されていることも可能である。これら圧接装置3、5は、例えば、図示されているように、液圧−、または空気圧シリンダーによって形成されている。
更に、図1に従って、位置測定器7が設けられており、これら位置測定器は、圧接装置3、5内におけるピストンの移動道程を測定可能である。選択的に、他の位置測定器7を、例えば、これら位置測定器が直接的にガイド2、4との接触状態においてガイドの位置を決定するように、設けることは、同様に可能である。
同様に、例えば電磁波の助力でもってのように、非接触の位置測定も可能であり、且つ有利である。
更に、図1内において、圧力測定機器8、即ち圧力測定器8が図示されており、これら圧力測定機器が、ピストンシリンダーユニット3、5内において、圧力値を測定可能である。これらの値から、公知の処理方法に従って、ガイド2、4に対して作用する、力K1、K2が推量(geschlossen)され得る。
選択的に、同様に、1つのモータ3、5、特に1つの回転モータでもっての1つの駆動装置の場合、このモータの駆動トルクが、ガイド2、4に対する力を決定するために使用され得る。
【0018】
図2内において、制御回路図が図示されており、この制御回路図は、全く例示的に、本発明に従う方法を明瞭に示している。
この図2の左側に、第1のガイド2のための位置制御回路が示されており、この右側に、第2のガイド4のための位置制御回路が示されている。この第1のガイド2のための位置制御回路によって、このガイド2は、目標位置S1において保持されるべきである。
実際上は、ストリップ1の圧力の様式における妨害Z1が、制御回路の制御区間RS1に対して、即ちガイド2に対して作用する。この妨害によって、第1のガイドの、結果として生じる位置P1が与えられ、この位置は、測定要素MG1によって決定され得る。
このような測定要素は、例えば、位置測定器7であることは可能である。
この測定された値は、次いで、ガイド2の位置の目標値S1と比較される。位置P1の実際値とこの位置P1の目標値との間に差がある場合、この相違は、制御要素RG1によって、位置調節要素SG1のための情報に変換される。
この位置調節要素SG1は、有利には、図1における圧接装置3、5内の1つの圧接装置によって形成されている。選択的に、実際上は、同様に、電気的なまたは回転的なモータも考慮の対象となる。この位置調節要素SG1は、要するに、再び、制御区間RS1、即ちガイド2を、およびこのガイド2の位置を調節する。
【0019】
上記で説明した制御回路に類似して、ガイド4、即ち第2のガイド4の位置制御回路は作動する。
このガイド4の位置の制御区間RS2に、妨害Z2、即ち金属ストリップ1の圧力が作用する。総じて、このガイド4の位置P2は、調節される。
この位置P2は、測定要素MG2によって測定され得る。次いで、この測定された位置P2は、このガイド4の目標位置S2と比較される。これら両方の値の間の存在する差は、制御要素RG2に引き渡される。
この制御要素RG2は、制御技術において通例のように、位置調節要素SG2に対して位置調節値を出力し、この位置調節要素が、従って、制御区間RS2を調節し、このことによって、制御回路が閉鎖される。
【0020】
本発明に従い、金属ストリップ1の両方の側面に対する位置制御に対して付加的に、同様に、ガイド2、4に対して作用する力も測定される。このことは、特に、それぞれの位置P1に対して、力K1が存在すること、および、それぞれの位置P2に対して、力K2が存在することを意味する。
これら力K1、K2は、同様に、図2内において、図式的に記号を付けられており、且つ、それぞれに、測定要素MG1′およびMG2′によって測定される。これら測定要素MG1′およびMG2′は、有利には、力測定器6または圧力測定器8によって形成されている。
【0021】
本発明に従う方法の次のステップにおいて、第1のガイド2において測定された力K1は、第2のガイド4において測定された力K2と互いに比較され、その際、これら両方の力K1、K2の内のより小さな力−以下で力K′と称される−が、有利には、制御器、即ち制御装置R1及び/またはR2に引き渡される。
K1がより小さな力であり、且つ従って、力K′に相応する場合、このより小さな力は制御器R1に引き渡され、この制御器が、変更された目標値S1を、第1のガイド2の位置のためにアウトプットする。この第1のガイド2の位置のための、力測定器によって修正された目標値(目標位置)S1は、次いで、この第1のガイド2の制御回路の更新された過程の際に、第1のガイド2の測定された位置値と比較される。
K2が、力K1およびK2の内のより小さな力である場合、この力K2、即ち力K′は、制御器R2に供給される。この制御器R2は、それ自身、ここで、新しい位置目標値S2を、第2のガイド4の位置のためにアウトプットする。
【0022】
値K′が、両方の制御器R1およびR2に引き渡されること、および、
これら両方の制御器R1およびR2が、測定された力値K′に相応して、それら位置制御回路に、新しい目標値S1およびS2を割り当てること、は同様に可能である。
有利には、目標値S1およびS2は、測定された力K1、K2、即ち接触力K1、K2内のより小さな力が、予め設定可能な下側の限界、即ち限界力と、予め設定可能な上側の限界、即ち限界力との間に存在するように、制御器R1およびR2によってアウトプットされる。
【0023】
この下側の限界は、その際有利には、システムの摩擦(Reibung)、即ちストリップ1の摩擦が克服され得、且つ従って、制御が、常にストリップ1の運動を調節することが可能なように選択される。この上側の限界は、有利には、例えば生じる摩擦力のような、設備パラメータによって定められ、または、同様に、それぞれの設備に応じて、所望された測定精度に依存することも可能である。
【符号の説明】
【0024】
1 金属ストリップ
2 第1のガイド
3 第1の圧接装置
4 第2のガイド
5 第2の圧接装置
6 力測定器
7 位置測定器
8 圧力測定器
9 第1の案内縁部
10 第2の案内縁部
K1 第1のガイドに存在する力
K2 第2のガイドに存在する力
K′ 測定された力K1、K2の内のより小さな力
MG1 第1のガイドの位置測定機器
MG2 第2のガイドの位置測定機器
MG1′ 第1のガイドの力測定機器
MG2′ 第2のガイドの力測定機器
P1 第1のガイドの位置
P2 第2のガイドの位置
R1 第1のガイドのための位置目標値S1のアウトプットのための制御器
R2 第2のガイドのための位置目標値S2のアウトプットのための制御器
RG1 第1のガイドの位置制御回路の制御要素
RG2 第2のガイドの位置制御回路の制御要素
RS1 第1のガイドの位置制御回路の制御区間
RS2 第2のガイドの位置制御回路の制御区間
S1 第1のガイドの位置のための目標値
S2 第2のガイドの位置のための目標値
SG1 第1のガイドの位置制御回路の位置調節要素
SG2 第2のガイドの位置制御回路の位置調節要素
Z1 第1のガイドの位置制御回路の妨害
Z2 第2のガイドの位置制御回路の妨害
【特許請求の範囲】
【請求項1】
特にロールスタンドまたは駆動装置の入側または出側内における、金属ストリップ(1)のサイドガイドを制御する方法であって、
その際、上記サイドガイドが、金属ストリップ(1)の一方の側面の上に、第1のガイド(2)を備えており、および、他方の側面の上に、第2のガイド(4)を備えており、
その際、これらガイド(2、4)が、互いに依存せずに移動され得、且つ、
それぞれに、位置制御された状態で作動され、且つ、
その際、第1のガイド(2)と第2のガイド(4)に対して作用する、金属ストリップ(1)の力(K1、K2)が測定される様式の上記方法において、
第1の、及び/または第2のガイド(2、4)のための目標位置(S1、S2)は、
第1の、および第2のガイド(2、4)において測定された力(K1、K2)に依存して、
それぞれに、第1のガイド(2)、および第2のガイド(4)において測定された力(K1、K2)の内のより小さな値(K′)が、選択可能な下側の限界力の上側に、および、選択可能な上側の限界力の下側に存在するように制御されることを特徴とする方法。
【請求項2】
上側の限界力は下側の限界力よりも大きいこと、および、
その際、第1のガイド(2)、および第2のガイド(4)において測定された力(K1、K2)の内のより小さな値(K′)が、下側の限界力を下回る場合、
第1の、及び/または第2のガイド(2、4)のための位置が、第1の、および第2のガイド(2、4)において測定された力(K1、K2)が増大されるように位置調節され、および、
その際、第1のガイド(2)、および第2のガイド(4)において測定された力(K1、K2)の内のより小さな値(K′)が、上側の限界力を上回る場合、
第1の、及び/または第2のガイド(2、4)のための位置が、第1の、および第2のガイド(2、4)において測定された力(K1、K2)が減少されるように位置調節されることを特徴とする請求項1に記載の方法。
【請求項3】
測定された力(K1、K2)は、ローパスフィルターでもってフィルターされることを特徴とする請求項1または2に記載の方法。
【請求項4】
第1の、および第2のガイド(2、4)は、駆動装置(3、5)によって駆動され、且つ、これら駆動装置(3、5)内の1つの駆動装置の駆動が、選択的に、液圧的にまたは空気圧的に行われることを特徴とする請求項1から3のいずれか一つに記載の方法。
【請求項5】
液圧的または空気圧的な駆動装置は、シリンダー室を備えており、および、
第1の、または第2のガイド(2、4)に対して作用する力(K1、K2)が、このシリンダー室内において測定された圧力から決定されることを特徴とする請求項4に記載の方法。
【請求項6】
第1の、および第2のガイド(2、4)は、駆動装置(3、5)によって駆動され、且つ、これら駆動装置内の1つの駆動装置の駆動が、選択的に、電気的なリニアモータによって行われることを特徴とする請求項1から3のいずれか一つに記載の方法。
【請求項7】
第1の、または第2のガイド(2、4)に対して作用する力は、リニアモータの測定された、電気的な大きさから決定されることを特徴とする請求項6に記載の方法。
【請求項8】
第1の、および第2のガイド(2、4)は、駆動装置(3、5)によって駆動され、且つ、その際、
これら駆動装置内の1つの駆動装置の駆動が、回転式のモータおよびスピンドル伝動装置を介して行われ、その際、
この回転式のモータが、選択的に、液圧的にまたは空気圧的に駆動されることを特徴とする請求項1から7のいずれか一つに記載の方法。
【請求項1】
特にロールスタンドまたは駆動装置の入側または出側内における、金属ストリップ(1)のサイドガイドを制御する方法であって、
その際、上記サイドガイドが、金属ストリップ(1)の一方の側面の上に、第1のガイド(2)を備えており、および、他方の側面の上に、第2のガイド(4)を備えており、
その際、これらガイド(2、4)が、互いに依存せずに移動され得、且つ、
それぞれに、位置制御された状態で作動され、且つ、
その際、第1のガイド(2)と第2のガイド(4)に対して作用する、金属ストリップ(1)の力(K1、K2)が測定される様式の上記方法において、
第1の、及び/または第2のガイド(2、4)のための目標位置(S1、S2)は、
第1の、および第2のガイド(2、4)において測定された力(K1、K2)に依存して、
それぞれに、第1のガイド(2)、および第2のガイド(4)において測定された力(K1、K2)の内のより小さな値(K′)が、選択可能な下側の限界力の上側に、および、選択可能な上側の限界力の下側に存在するように制御されることを特徴とする方法。
【請求項2】
上側の限界力は下側の限界力よりも大きいこと、および、
その際、第1のガイド(2)、および第2のガイド(4)において測定された力(K1、K2)の内のより小さな値(K′)が、下側の限界力を下回る場合、
第1の、及び/または第2のガイド(2、4)のための位置が、第1の、および第2のガイド(2、4)において測定された力(K1、K2)が増大されるように位置調節され、および、
その際、第1のガイド(2)、および第2のガイド(4)において測定された力(K1、K2)の内のより小さな値(K′)が、上側の限界力を上回る場合、
第1の、及び/または第2のガイド(2、4)のための位置が、第1の、および第2のガイド(2、4)において測定された力(K1、K2)が減少されるように位置調節されることを特徴とする請求項1に記載の方法。
【請求項3】
測定された力(K1、K2)は、ローパスフィルターでもってフィルターされることを特徴とする請求項1または2に記載の方法。
【請求項4】
第1の、および第2のガイド(2、4)は、駆動装置(3、5)によって駆動され、且つ、これら駆動装置(3、5)内の1つの駆動装置の駆動が、選択的に、液圧的にまたは空気圧的に行われることを特徴とする請求項1から3のいずれか一つに記載の方法。
【請求項5】
液圧的または空気圧的な駆動装置は、シリンダー室を備えており、および、
第1の、または第2のガイド(2、4)に対して作用する力(K1、K2)が、このシリンダー室内において測定された圧力から決定されることを特徴とする請求項4に記載の方法。
【請求項6】
第1の、および第2のガイド(2、4)は、駆動装置(3、5)によって駆動され、且つ、これら駆動装置内の1つの駆動装置の駆動が、選択的に、電気的なリニアモータによって行われることを特徴とする請求項1から3のいずれか一つに記載の方法。
【請求項7】
第1の、または第2のガイド(2、4)に対して作用する力は、リニアモータの測定された、電気的な大きさから決定されることを特徴とする請求項6に記載の方法。
【請求項8】
第1の、および第2のガイド(2、4)は、駆動装置(3、5)によって駆動され、且つ、その際、
これら駆動装置内の1つの駆動装置の駆動が、回転式のモータおよびスピンドル伝動装置を介して行われ、その際、
この回転式のモータが、選択的に、液圧的にまたは空気圧的に駆動されることを特徴とする請求項1から7のいずれか一つに記載の方法。
【図1】

【図2】
【図2】
【公表番号】特表2013−515615(P2013−515615A)
【公表日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−546417(P2012−546417)
【出願日】平成22年12月22日(2010.12.22)
【国際出願番号】PCT/EP2010/070473
【国際公開番号】WO2011/080174
【国際公開日】平成23年7月7日(2011.7.7)
【出願人】(390035426)エス・エム・エス・ジーマーク・アクチエンゲゼルシャフト (320)
【公表日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成22年12月22日(2010.12.22)
【国際出願番号】PCT/EP2010/070473
【国際公開番号】WO2011/080174
【国際公開日】平成23年7月7日(2011.7.7)
【出願人】(390035426)エス・エム・エス・ジーマーク・アクチエンゲゼルシャフト (320)
[ Back to top ]