
金属板位置決め装置
【課題】平板の端面にフェース材を取り付ける場合に、平板に反りなどの変形が生じていたとしても、平板にフェース材をほぼ垂直に保持しつつ所定位置に配置可能な金属板位置決め装置を提供する。
【解決手段】クレーン1に回転可能に支持されて、水平方向及び鉛直方向に移動可能とした装置基部11と、この装置基部11に対して該装置基部11の回転軸と直交する方向の軸14回りに回動可能に支持されて、フェース材Fを保持解放するハンド12と、このハンド12にフェース材Fが保持された状態で、ハンド12に対するフェース材Fの位置及び姿勢を検出する位置決め体17及びレーザセンサなどのセンサ18と、ベースパネルBPの近傍に位置した段階で、装置基部11に設定された基準点からベースパネルBPまでの距離を計測するレーザ距離計21を備えている。
【解決手段】クレーン1に回転可能に支持されて、水平方向及び鉛直方向に移動可能とした装置基部11と、この装置基部11に対して該装置基部11の回転軸と直交する方向の軸14回りに回動可能に支持されて、フェース材Fを保持解放するハンド12と、このハンド12にフェース材Fが保持された状態で、ハンド12に対するフェース材Fの位置及び姿勢を検出する位置決め体17及びレーザセンサなどのセンサ18と、ベースパネルBPの近傍に位置した段階で、装置基部11に設定された基準点からベースパネルBPまでの距離を計測するレーザ距離計21を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、鋼板等の金属板の端面や、この金属板に形成された孔部や切欠き部の縁の面に、これを覆う他の金属板(いわゆるフェース材)を金属板に対してほぼ垂直に取り付ける際に用いられる金属板位置決め装置に関するものである。
【背景技術】
【0002】
従来、例えば、造船の生産ラインでは、鋼板からの板材の切り出し工程、加工工程、小組立て工程及び大組立て工程を経てブロックを製作するブロック建造法が広く採用されている。
溶接による小組立て工程において、ブロックを構成するサブ材は、主に、平板状を成すベースパネル上に補強部材であるウェブ材を取り付けたり、ベースパネルの側端面に同じく補強部材であるフェース材を取り付けたりすることで製作される。
【0003】
この小組立て工程において、ウェブ材やフェース材などの金属板を所定の溶接位置に運ぶ配材装置としては、例えば、特許文献1に開示されているように、門型クレーン上に6軸多関節型のハンドリングロボットを設置し、このハンドリングロボットによりベースパネル近傍に搬送すると共に、ベースパネルに対するウェブ材及びフェース材の各位置決めを行うようにしたものがある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001-1979号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、上記した配材装置では、ベースパネルの側端面にフェース材を取り付けるに際して、治具上に載置したベースパネルに対して、ハンドリングロボットによりフェース材を垂直に立てた状態で保持しつつ上下方向の所定位置に配置するようにしているが、ベースパネルに僅かにでも反りなどの変形が生じていた場合には、その都度上下方向の位置補正を行わなくてはならず、ベースパネル上にウェブ材を配置する場合と比較して、フェース材の配置及び位置決め作業が困難で且つ煩雑な作業になっているという問題があり、この問題を解決することが従来の課題となっていた。
【0006】
本発明は、上記した従来の課題に着目してなされたもので、例えば、一方の金属板である平板の端面に他方の金属板であるフェース材を取り付ける場合において、平板に反りなどの変形が生じていたとしても、この平板に対してフェース材をほぼ垂直に保持しつつ所定位置に配置することが可能である金属板位置決め装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明の請求項1に係る発明は、鋼板等の一方の金属板の端面や、この一方の金属板に形成された孔部や切欠き部の縁の面に、鋼板等の他方の金属板を前記一方の金属板に対して垂直ないし垂直に近い状態で取り付ける際の該他方の金属板の位置決め装置であって、クレーンや6軸多関節ロボットなどの移送手段に回転可能に支持されて、水平方向及び鉛直方向に移動可能とした装置基部と、この装置基部に対して該装置基部の回転軸と直交する方向の軸回りに回動可能に支持されて、前記他方の金属板を保持解放する金属板保持部と、この金属板保持部に前記他方の金属板が保持された状態で、該金属板保持部に対する前記他方の金属板の位置及び姿勢を検出する金属板位置検出手段と、前記一方の金属板の近傍に位置した段階で、前記装置基部に設定された基準点から前記一方の金属板までの距離を計測する距離測定手段を備えている構成としたことを特徴としており、この金属板位置決め装置の構成を前述した従来の課題を解決するための手段としている。
【0008】
また、本発明の請求項2に係る金属板位置決め装置において、前記金属位置検出手段は、他方の金属板の端面と接触することで位置及び姿勢を検出する位置決め体である構成としている。
この場合、本発明の請求項3に係る金属板位置決め装置のように、前記位置決め体を他方の金属板の端面に接近離間させる位置決め体駆動機構を備えている構成とすることができる。
【0009】
さらに、本発明の請求項4に係る金属板位置決め装置において、前記金属位置検出手段は、他方の金属板の縁の位置を認識することで位置及び姿勢を検出するセンサである構成としている。
この際も、本発明の請求項5に係る金属板位置決め装置のように、前記センサを他方の金属板の縁に接近離間させるセンサ駆動機構を備えている構成とすることができる。
【0010】
本発明に係る金属板位置決め装置において、金属板保持部には、マグネット吸着タイプのものや、吸引タイプのものや、クランプタイプのものなど、様々なタイプのものを用いることができ、特に限定しない。
また、本発明に係る金属板位置決め装置において、距離測定手段には、接触式及び非接触式のいずれの方式のものも用いることができるが、レーザ距離計などの非接触式で長距離の計測を行うことができるものを用いることが望ましい。
【0011】
さらに、本発明に係る金属板位置決め装置において、使用するセンサは種類を問わないが、光電式センサなどのオンオフのみで検出するタイプのセンサは、機械的に位置をスキャンすることで他方の金属板の縁を検出することができ、画像計測やレーザセンサなどのアナログで位置を検出するタイプのセンサは、他方の金属板の縁を直接的に検出することができる。
【0012】
本発明に係る金属板位置決め装置では、例えば、寝かせた状態の他方の金属板を取り上げて、同じく寝かせた状態の一方の金属板の端面に取り付ける場合、まず、金属板保持部で他方の金属板を保持すると、金属板位置検出手段により金属板保持部に対する他方の金属板の位置及び姿勢を認識し得ることとなる。
次いで、他方の金属板を保持した金属板保持部を装置基部に対して回動させて他方の金属板を立てた後、移送手段により装置基部及び金属板保持部を移動させて他方の金属板を一方の金属板の近傍に位置させ、装置基部に設定された基準点から一方の金属板までの垂直距離を距離測定手段によって計測し、この垂直距離に基づいて移送手段により装置基部及び金属板保持部を移動させて他方の金属板の位置決めを行うと、一方の金属板に対する所定位置に他方の金属板が配置されることとなる。
【0013】
ここで、金属位置検出手段が、他方の金属板の端面と接触することで位置及び姿勢を検出する位置決め体である場合には、搬送時に金属板保持部に対する他方の金属板の位置ずれを回避できる。
一方、金属位置検出手段が、他方の金属板の縁の位置を認識することで位置及び姿勢を検出するセンサである場合には、このセンサからの信号に基づいて他方の金属板の搬送目標位置及び姿勢を補正することで、所定位置により正確に位置決めし得ることとなる。
【0014】
これらの位置決め体及びセンサは、長尺状を成している他方の金属板の位置決めに対応するべく、いずれも他方の金属板の長手方向の複数箇所に配置するようにしてもよく、このように、位置決め体及びセンサを複数箇所に配置することで、他方の金属板がその面内で回転するのを阻止したり、回転方向のずれを補正したりし得ることとなる。
なお、位置決め体及びセンサは、いずれか一方備えていれば事足りるが、位置決め体及びセンサの双方を備えることで、より確実な位置決めが可能となる。
【0015】
また、位置決め体駆動機構及びセンサ駆動機構としては、ボールスクリュー方式やテレスコピック方式やラック&ピニオン方式での駆動機構を採用することができる。
【発明の効果】
【0016】
本発明の請求項1に係る金属板位置決め装置では、上記した構成としているので、例えば、平板状の一方の金属板の端面に他方の金属板を取り付ける場合において、一方の金属板に反りなどの変形が生じていたとしても、この一方の金属板に対して他方の金属板をほぼ垂直に保持しつつ所定位置に配置することが可能であるという非常に優れた効果がもたらされる。
【0017】
また、本発明の請求項2,3に係る金属板位置決め装置では、上記した構成としたため、搬送時における他方の金属板の金属板保持部に対する位置ずれを防ぐことができるという非常に優れた効果がもたらされる。
さらに、本発明の請求項4,5に係る金属板位置決め装置では、上記した構成としているので、他方の金属板を所定位置に正確に位置決めすることができるという非常に優れた効果がもたらされる。
【図面の簡単な説明】
【0018】
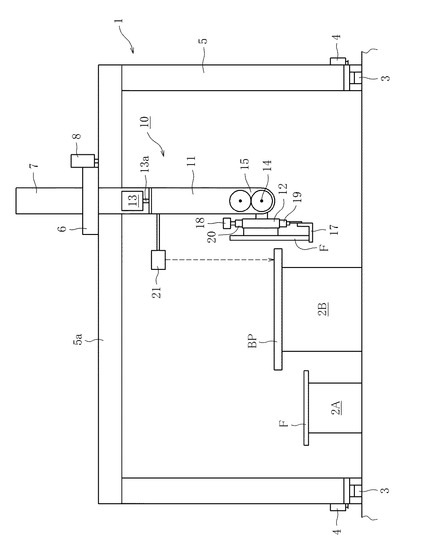
【図1】本発明に係る金属板位置決め装置の一実施例を示す既存の門型クレーンに支持させた状況における正面説明図である。
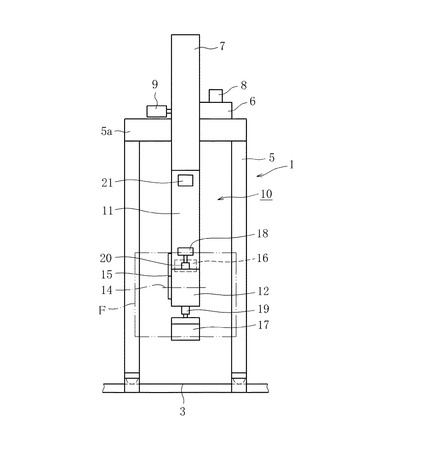
【図2】図1に示した金属板位置決め装置の側面説明図である。
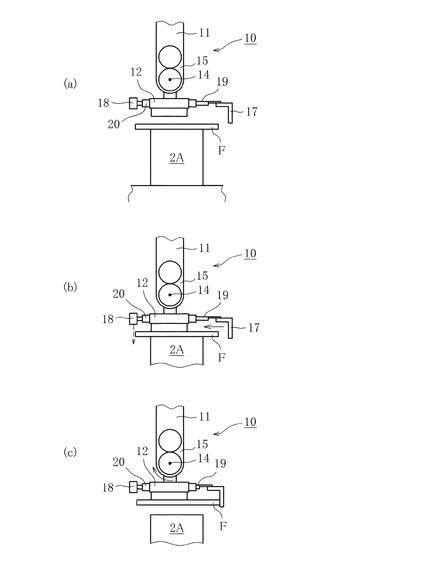
【図3】図1における金属板位置決め装置の位置決め要領を示す動作説明図(a)〜(c)である。
【発明を実施するための形態】
【0019】
以下、本発明に係る金属板位置決め装置を図面に基づいて説明する。
図1〜図3は、本発明に係る金属板位置決め装置の一実施例を示しており、この実施例では、本発明に係る金属板位置決め装置が移送手段としての門型クレーンに支持される場合を例に挙げて説明する。
図1に示すように、移送手段としての門型クレーン1は、金属板載置部2A,2Bの両側に沿って配置したレール3と、金属板載置部2A,2Bに跨って設けられてレール3上をモータ4の出力によりラック&ピニオン方式で走行する門型台車5と、この門型台車5の横梁5a上を往復移動するスライダ6と、このスライダ6に鉛直方向に移動可能に支持される昇降ポスト7を備えており、スライダ6及び昇降ポスト7も、図2に示すように、それぞれモータ8,9の出力によりラック&ピニオン方式で移動するようになっている。
【0020】
金属板載置部2Aにはフェース材(他方の金属板)Fが寝かせた状態で載置され、金属板載置部2Bにはベースパネル(一方の金属板)BPが同じく寝かせた状態で載置される。
この門型クレーン1に支持される金属板位置決め装置10は、昇降ポスト7に支持された装置基部11と、金属板載置部2A上に載置されるフェース材Fを保持解放するマグネット吸着タイプのハンド(金属板保持部)12を備えている。
【0021】
装置基部11は昇降ポスト7の下端部に配置された鉛直方向に沿うモータ13の出力軸13aに接続してあり、一方、ハンド12は装置基部11に対して水平方向の軸14回りに回動可能に支持されていて、このハンド12は、歯車機構15を介して伝達される装置基部11内のモータ16の出力により回動する。
この場合、ハンド12には、このハンド12にフェース材Fを保持した状態において、フェース材Fの端面と当接してハンド12に対するフェース材Fの位置及び姿勢を検出する金属板位置検出手段としての鉤状の位置決め体17と、同じくハンド12にフェース材Fを保持した状態で、フェース材Fの縁の位置を認識することでハンド12に対するフェース材Fの位置及び姿勢を検出する金属板位置検出手段としてのセンサ18が設けてある。
【0022】
ここで、金属板位置検出手段として使用するセンサ18は種類を問わない。例えば、オンオフのみで検出するタイプの光電式センサや、アナログで位置を検出するタイプのレーザセンサを用いることができる(図示例ではレーザセンサ)。
これらの位置決め体17及びセンサ18は、いずれもテレスコピック方式の駆動機構19,20により、立てた状態のハンド12の保持面に沿って上下方向に移動可能となっている。
【0023】
また、装置基部11には、門型台車5,スライダ6及び昇降ポスト7をそれぞれ動作させると共に、装置基部11及びハンド12自体を動作させて、フェース材Fを立てた状態で金属板載置部2B上のベースパネルBPの近傍に位置させた段階において、装置基部11に設定された基準点(図示せず)からベースパネルBPまでの距離を計測するレーザ距離計(距離測定手段)21が配置してある。
【0024】
次に、上記した本実施例に係る金属板位置決め装置10の動作を説明する。
まず、図3(a)に示すように、門型台車5,スライダ6及び昇降ポスト7をそれぞれ動作させると共に、装置基部11及びハンド12自体を動作させて、金属板載置部2A上に寝かせた状態で載置されたフェース材Fの上面付近にハンド12を移動させる。
次いで、図3(b)に示すように、昇降ポスト7を下降させてハンド12によりフェース材Fを保持した後、駆動機構19により鉤状の位置決め体17を動作させて、フェース材Fの端面に当接させる。
【0025】
この際、ハンド12によりフェース材Fを保持する前に、スライダ6を動作させて位置決め体17をフェース材Fの端面に当接させてもよいし、後述するように、ハンド12を回動させてフェース材Fを立てるときに、ハンド12の保持力を少し緩めてフェース材Fの端面が自重で位置決め体17に当接するようにしてもよく、いずれの場合も、ハンド12に対するフェース材Fの位置及び姿勢が検出されることとなり、加えて、フェース材Fの端面が位置決め体17に当接するので、搬送中にハンド12に対してフェース材Fがずれるのを阻止し得ることとなる。
【0026】
また、ハンド12によりフェース材Fを保持した後、駆動機構20によりセンサ18を動作させて、フェース材Fの縁の位置を認識させれば、ハンド12に対するフェース材Fの位置及び姿勢の検出がより確実になされることとなる。
続いて、図3(c)に示すように、フェース材Fを保持したハンド12を上昇させつつ装置基部11に対して矢印方向に回動させてフェース材Fを立てた後、門型台車5,スライダ6及び昇降ポスト7をそれぞれ動作させて、図1に示すように、装置基部11及びハンド12を移動させてフェース材Fを金属板載置部2B上のベースパネルBPの近傍に位置させる。
【0027】
そして、装置基部11に設定された基準点からベースパネルBPまでの垂直距離をレーザ距離計21によって計測し、この垂直距離に基づいて昇降ポスト7により装置基部11及びハンド12を移動させてフェース材Fの位置決めを行うと、ベースパネルBPに対する所定位置にフェース材Fが配置されることとなる。
このように、本実施例に係る金属板位置決め装置10では、ベースパネルBPの近傍において、レーザ距離計21によって、装置基部11に設定された基準点からベースパネルBPまでの垂直距離を計測するようにしているので、ベースパネルBPに反りなどの変形が生じていたとしても、このベースパネルBPに対してフェース材Fをほぼ垂直に保持しつつ所定位置に配置し得ることとなる。
【0028】
なお、本実施例に係る金属板位置決め装置10では、位置決め体17、及び、光電式センサやレーザセンサなどのセンサ18を一つずつ配置した構成としているが、長尺状を成しているフェース材Fの位置決めに対応するべく、いずれもフェース材Fの長手方向の複数箇所に配置するようにしてもよく、このように、位置決め体17及びセンサ18を複数箇所に配置するようになせば、長尺状のフェース材Fがその面内で回転するのを阻止したり、回転方向のずれを補正したりし得ることとなる。
【0029】
また、位置決め体17及びセンサ18は、必ずしも両方備えている必要はないが、双方を備えることでより確実な位置決めが可能となる。
さらに、本実施例に係る金属板位置決め装置10では、また、位置決め体駆動機構19及びセンサ駆動機構20が、いずれもテレスコピック方式である場合を示したが、他の駆動機構として、ボールスクリュー方式やラック&ピニオン方式の駆動機構を採用することができる。
【0030】
さらにまた、本実施例に係る金属板位置決め装置10では、移送手段としての門型クレーン1に支持される場合を例に挙げて説明したが、移送手段としての6軸多関節ロボットに支持される場合であってもよい。
本発明に係る金属板位置決め装置の構成は、上記した実施例による金属板位置決め装置10の構成に限定されるものではない。
【符号の説明】
【0031】
1 門型クレーン
2A,2B 金属板載置部
3 レール
5 門型台車
6 スライダ
7 昇降ポスト
10 金属板位置決め装置
11 装置基部
12 ハンド(金属板保持部)
14 水平軸(装置基部の回転軸と直交する方向の軸)
17 位置決め体(金属板位置検出手段)
18 センサ(金属板位置検出手段)
19 位置決め体駆動機構
20 センサ駆動機構
21 レーザ距離計(距離測定手段)
BP ベースパネル(一方の金属板)
F フェース材(他方の金属板)
【技術分野】
【0001】
本発明は、鋼板等の金属板の端面や、この金属板に形成された孔部や切欠き部の縁の面に、これを覆う他の金属板(いわゆるフェース材)を金属板に対してほぼ垂直に取り付ける際に用いられる金属板位置決め装置に関するものである。
【背景技術】
【0002】
従来、例えば、造船の生産ラインでは、鋼板からの板材の切り出し工程、加工工程、小組立て工程及び大組立て工程を経てブロックを製作するブロック建造法が広く採用されている。
溶接による小組立て工程において、ブロックを構成するサブ材は、主に、平板状を成すベースパネル上に補強部材であるウェブ材を取り付けたり、ベースパネルの側端面に同じく補強部材であるフェース材を取り付けたりすることで製作される。
【0003】
この小組立て工程において、ウェブ材やフェース材などの金属板を所定の溶接位置に運ぶ配材装置としては、例えば、特許文献1に開示されているように、門型クレーン上に6軸多関節型のハンドリングロボットを設置し、このハンドリングロボットによりベースパネル近傍に搬送すると共に、ベースパネルに対するウェブ材及びフェース材の各位置決めを行うようにしたものがある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001-1979号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、上記した配材装置では、ベースパネルの側端面にフェース材を取り付けるに際して、治具上に載置したベースパネルに対して、ハンドリングロボットによりフェース材を垂直に立てた状態で保持しつつ上下方向の所定位置に配置するようにしているが、ベースパネルに僅かにでも反りなどの変形が生じていた場合には、その都度上下方向の位置補正を行わなくてはならず、ベースパネル上にウェブ材を配置する場合と比較して、フェース材の配置及び位置決め作業が困難で且つ煩雑な作業になっているという問題があり、この問題を解決することが従来の課題となっていた。
【0006】
本発明は、上記した従来の課題に着目してなされたもので、例えば、一方の金属板である平板の端面に他方の金属板であるフェース材を取り付ける場合において、平板に反りなどの変形が生じていたとしても、この平板に対してフェース材をほぼ垂直に保持しつつ所定位置に配置することが可能である金属板位置決め装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明の請求項1に係る発明は、鋼板等の一方の金属板の端面や、この一方の金属板に形成された孔部や切欠き部の縁の面に、鋼板等の他方の金属板を前記一方の金属板に対して垂直ないし垂直に近い状態で取り付ける際の該他方の金属板の位置決め装置であって、クレーンや6軸多関節ロボットなどの移送手段に回転可能に支持されて、水平方向及び鉛直方向に移動可能とした装置基部と、この装置基部に対して該装置基部の回転軸と直交する方向の軸回りに回動可能に支持されて、前記他方の金属板を保持解放する金属板保持部と、この金属板保持部に前記他方の金属板が保持された状態で、該金属板保持部に対する前記他方の金属板の位置及び姿勢を検出する金属板位置検出手段と、前記一方の金属板の近傍に位置した段階で、前記装置基部に設定された基準点から前記一方の金属板までの距離を計測する距離測定手段を備えている構成としたことを特徴としており、この金属板位置決め装置の構成を前述した従来の課題を解決するための手段としている。
【0008】
また、本発明の請求項2に係る金属板位置決め装置において、前記金属位置検出手段は、他方の金属板の端面と接触することで位置及び姿勢を検出する位置決め体である構成としている。
この場合、本発明の請求項3に係る金属板位置決め装置のように、前記位置決め体を他方の金属板の端面に接近離間させる位置決め体駆動機構を備えている構成とすることができる。
【0009】
さらに、本発明の請求項4に係る金属板位置決め装置において、前記金属位置検出手段は、他方の金属板の縁の位置を認識することで位置及び姿勢を検出するセンサである構成としている。
この際も、本発明の請求項5に係る金属板位置決め装置のように、前記センサを他方の金属板の縁に接近離間させるセンサ駆動機構を備えている構成とすることができる。
【0010】
本発明に係る金属板位置決め装置において、金属板保持部には、マグネット吸着タイプのものや、吸引タイプのものや、クランプタイプのものなど、様々なタイプのものを用いることができ、特に限定しない。
また、本発明に係る金属板位置決め装置において、距離測定手段には、接触式及び非接触式のいずれの方式のものも用いることができるが、レーザ距離計などの非接触式で長距離の計測を行うことができるものを用いることが望ましい。
【0011】
さらに、本発明に係る金属板位置決め装置において、使用するセンサは種類を問わないが、光電式センサなどのオンオフのみで検出するタイプのセンサは、機械的に位置をスキャンすることで他方の金属板の縁を検出することができ、画像計測やレーザセンサなどのアナログで位置を検出するタイプのセンサは、他方の金属板の縁を直接的に検出することができる。
【0012】
本発明に係る金属板位置決め装置では、例えば、寝かせた状態の他方の金属板を取り上げて、同じく寝かせた状態の一方の金属板の端面に取り付ける場合、まず、金属板保持部で他方の金属板を保持すると、金属板位置検出手段により金属板保持部に対する他方の金属板の位置及び姿勢を認識し得ることとなる。
次いで、他方の金属板を保持した金属板保持部を装置基部に対して回動させて他方の金属板を立てた後、移送手段により装置基部及び金属板保持部を移動させて他方の金属板を一方の金属板の近傍に位置させ、装置基部に設定された基準点から一方の金属板までの垂直距離を距離測定手段によって計測し、この垂直距離に基づいて移送手段により装置基部及び金属板保持部を移動させて他方の金属板の位置決めを行うと、一方の金属板に対する所定位置に他方の金属板が配置されることとなる。
【0013】
ここで、金属位置検出手段が、他方の金属板の端面と接触することで位置及び姿勢を検出する位置決め体である場合には、搬送時に金属板保持部に対する他方の金属板の位置ずれを回避できる。
一方、金属位置検出手段が、他方の金属板の縁の位置を認識することで位置及び姿勢を検出するセンサである場合には、このセンサからの信号に基づいて他方の金属板の搬送目標位置及び姿勢を補正することで、所定位置により正確に位置決めし得ることとなる。
【0014】
これらの位置決め体及びセンサは、長尺状を成している他方の金属板の位置決めに対応するべく、いずれも他方の金属板の長手方向の複数箇所に配置するようにしてもよく、このように、位置決め体及びセンサを複数箇所に配置することで、他方の金属板がその面内で回転するのを阻止したり、回転方向のずれを補正したりし得ることとなる。
なお、位置決め体及びセンサは、いずれか一方備えていれば事足りるが、位置決め体及びセンサの双方を備えることで、より確実な位置決めが可能となる。
【0015】
また、位置決め体駆動機構及びセンサ駆動機構としては、ボールスクリュー方式やテレスコピック方式やラック&ピニオン方式での駆動機構を採用することができる。
【発明の効果】
【0016】
本発明の請求項1に係る金属板位置決め装置では、上記した構成としているので、例えば、平板状の一方の金属板の端面に他方の金属板を取り付ける場合において、一方の金属板に反りなどの変形が生じていたとしても、この一方の金属板に対して他方の金属板をほぼ垂直に保持しつつ所定位置に配置することが可能であるという非常に優れた効果がもたらされる。
【0017】
また、本発明の請求項2,3に係る金属板位置決め装置では、上記した構成としたため、搬送時における他方の金属板の金属板保持部に対する位置ずれを防ぐことができるという非常に優れた効果がもたらされる。
さらに、本発明の請求項4,5に係る金属板位置決め装置では、上記した構成としているので、他方の金属板を所定位置に正確に位置決めすることができるという非常に優れた効果がもたらされる。
【図面の簡単な説明】
【0018】
【図1】本発明に係る金属板位置決め装置の一実施例を示す既存の門型クレーンに支持させた状況における正面説明図である。
【図2】図1に示した金属板位置決め装置の側面説明図である。
【図3】図1における金属板位置決め装置の位置決め要領を示す動作説明図(a)〜(c)である。
【発明を実施するための形態】
【0019】
以下、本発明に係る金属板位置決め装置を図面に基づいて説明する。
図1〜図3は、本発明に係る金属板位置決め装置の一実施例を示しており、この実施例では、本発明に係る金属板位置決め装置が移送手段としての門型クレーンに支持される場合を例に挙げて説明する。
図1に示すように、移送手段としての門型クレーン1は、金属板載置部2A,2Bの両側に沿って配置したレール3と、金属板載置部2A,2Bに跨って設けられてレール3上をモータ4の出力によりラック&ピニオン方式で走行する門型台車5と、この門型台車5の横梁5a上を往復移動するスライダ6と、このスライダ6に鉛直方向に移動可能に支持される昇降ポスト7を備えており、スライダ6及び昇降ポスト7も、図2に示すように、それぞれモータ8,9の出力によりラック&ピニオン方式で移動するようになっている。
【0020】
金属板載置部2Aにはフェース材(他方の金属板)Fが寝かせた状態で載置され、金属板載置部2Bにはベースパネル(一方の金属板)BPが同じく寝かせた状態で載置される。
この門型クレーン1に支持される金属板位置決め装置10は、昇降ポスト7に支持された装置基部11と、金属板載置部2A上に載置されるフェース材Fを保持解放するマグネット吸着タイプのハンド(金属板保持部)12を備えている。
【0021】
装置基部11は昇降ポスト7の下端部に配置された鉛直方向に沿うモータ13の出力軸13aに接続してあり、一方、ハンド12は装置基部11に対して水平方向の軸14回りに回動可能に支持されていて、このハンド12は、歯車機構15を介して伝達される装置基部11内のモータ16の出力により回動する。
この場合、ハンド12には、このハンド12にフェース材Fを保持した状態において、フェース材Fの端面と当接してハンド12に対するフェース材Fの位置及び姿勢を検出する金属板位置検出手段としての鉤状の位置決め体17と、同じくハンド12にフェース材Fを保持した状態で、フェース材Fの縁の位置を認識することでハンド12に対するフェース材Fの位置及び姿勢を検出する金属板位置検出手段としてのセンサ18が設けてある。
【0022】
ここで、金属板位置検出手段として使用するセンサ18は種類を問わない。例えば、オンオフのみで検出するタイプの光電式センサや、アナログで位置を検出するタイプのレーザセンサを用いることができる(図示例ではレーザセンサ)。
これらの位置決め体17及びセンサ18は、いずれもテレスコピック方式の駆動機構19,20により、立てた状態のハンド12の保持面に沿って上下方向に移動可能となっている。
【0023】
また、装置基部11には、門型台車5,スライダ6及び昇降ポスト7をそれぞれ動作させると共に、装置基部11及びハンド12自体を動作させて、フェース材Fを立てた状態で金属板載置部2B上のベースパネルBPの近傍に位置させた段階において、装置基部11に設定された基準点(図示せず)からベースパネルBPまでの距離を計測するレーザ距離計(距離測定手段)21が配置してある。
【0024】
次に、上記した本実施例に係る金属板位置決め装置10の動作を説明する。
まず、図3(a)に示すように、門型台車5,スライダ6及び昇降ポスト7をそれぞれ動作させると共に、装置基部11及びハンド12自体を動作させて、金属板載置部2A上に寝かせた状態で載置されたフェース材Fの上面付近にハンド12を移動させる。
次いで、図3(b)に示すように、昇降ポスト7を下降させてハンド12によりフェース材Fを保持した後、駆動機構19により鉤状の位置決め体17を動作させて、フェース材Fの端面に当接させる。
【0025】
この際、ハンド12によりフェース材Fを保持する前に、スライダ6を動作させて位置決め体17をフェース材Fの端面に当接させてもよいし、後述するように、ハンド12を回動させてフェース材Fを立てるときに、ハンド12の保持力を少し緩めてフェース材Fの端面が自重で位置決め体17に当接するようにしてもよく、いずれの場合も、ハンド12に対するフェース材Fの位置及び姿勢が検出されることとなり、加えて、フェース材Fの端面が位置決め体17に当接するので、搬送中にハンド12に対してフェース材Fがずれるのを阻止し得ることとなる。
【0026】
また、ハンド12によりフェース材Fを保持した後、駆動機構20によりセンサ18を動作させて、フェース材Fの縁の位置を認識させれば、ハンド12に対するフェース材Fの位置及び姿勢の検出がより確実になされることとなる。
続いて、図3(c)に示すように、フェース材Fを保持したハンド12を上昇させつつ装置基部11に対して矢印方向に回動させてフェース材Fを立てた後、門型台車5,スライダ6及び昇降ポスト7をそれぞれ動作させて、図1に示すように、装置基部11及びハンド12を移動させてフェース材Fを金属板載置部2B上のベースパネルBPの近傍に位置させる。
【0027】
そして、装置基部11に設定された基準点からベースパネルBPまでの垂直距離をレーザ距離計21によって計測し、この垂直距離に基づいて昇降ポスト7により装置基部11及びハンド12を移動させてフェース材Fの位置決めを行うと、ベースパネルBPに対する所定位置にフェース材Fが配置されることとなる。
このように、本実施例に係る金属板位置決め装置10では、ベースパネルBPの近傍において、レーザ距離計21によって、装置基部11に設定された基準点からベースパネルBPまでの垂直距離を計測するようにしているので、ベースパネルBPに反りなどの変形が生じていたとしても、このベースパネルBPに対してフェース材Fをほぼ垂直に保持しつつ所定位置に配置し得ることとなる。
【0028】
なお、本実施例に係る金属板位置決め装置10では、位置決め体17、及び、光電式センサやレーザセンサなどのセンサ18を一つずつ配置した構成としているが、長尺状を成しているフェース材Fの位置決めに対応するべく、いずれもフェース材Fの長手方向の複数箇所に配置するようにしてもよく、このように、位置決め体17及びセンサ18を複数箇所に配置するようになせば、長尺状のフェース材Fがその面内で回転するのを阻止したり、回転方向のずれを補正したりし得ることとなる。
【0029】
また、位置決め体17及びセンサ18は、必ずしも両方備えている必要はないが、双方を備えることでより確実な位置決めが可能となる。
さらに、本実施例に係る金属板位置決め装置10では、また、位置決め体駆動機構19及びセンサ駆動機構20が、いずれもテレスコピック方式である場合を示したが、他の駆動機構として、ボールスクリュー方式やラック&ピニオン方式の駆動機構を採用することができる。
【0030】
さらにまた、本実施例に係る金属板位置決め装置10では、移送手段としての門型クレーン1に支持される場合を例に挙げて説明したが、移送手段としての6軸多関節ロボットに支持される場合であってもよい。
本発明に係る金属板位置決め装置の構成は、上記した実施例による金属板位置決め装置10の構成に限定されるものではない。
【符号の説明】
【0031】
1 門型クレーン
2A,2B 金属板載置部
3 レール
5 門型台車
6 スライダ
7 昇降ポスト
10 金属板位置決め装置
11 装置基部
12 ハンド(金属板保持部)
14 水平軸(装置基部の回転軸と直交する方向の軸)
17 位置決め体(金属板位置検出手段)
18 センサ(金属板位置検出手段)
19 位置決め体駆動機構
20 センサ駆動機構
21 レーザ距離計(距離測定手段)
BP ベースパネル(一方の金属板)
F フェース材(他方の金属板)
【特許請求の範囲】
【請求項1】
鋼板等の一方の金属板の端面や、この一方の金属板に形成された孔部や切欠き部の縁の面に、鋼板等の他方の金属板を前記一方の金属板に対して垂直ないし垂直に近い状態で取り付ける際の該他方の金属板の位置決め装置であって、
クレーンやロボットなどの移送手段に回転可能に支持されて、水平方向及び鉛直方向に移動可能とした装置基部と、
この装置基部に対して該装置基部の回転軸と直交する方向の軸回りに回動可能に支持されて、前記他方の金属板を保持解放する金属板保持部と、
この金属板保持部に前記他方の金属板が保持された状態で、該金属板保持部に対する前記他方の金属板の位置及び姿勢を検出する金属板位置検出手段と、
前記一方の金属板の近傍に位置した段階で、前記装置基部に設定された基準点から前記一方の金属板までの距離を計測する距離測定手段を備えている
ことを特徴とする金属板位置決め装置。
【請求項2】
前記金属位置検出手段は、他方の金属板の端面と接触することで位置及び姿勢を検出する位置決め体である請求項1に記載の金属板位置決め装置。
【請求項3】
前記位置決め体を他方の金属板の端面に接近離間させる位置決め体駆動機構を備えている請求項2に記載の金属板位置決め装置。
【請求項4】
前記金属位置検出手段は、他方の金属板の縁の位置を認識することで位置及び姿勢を検出するセンサである請求項1に記載の金属板位置決め装置。
【請求項5】
前記センサを他方の金属板の縁に接近離間させるセンサ駆動機構を備えている請求項4に記載の金属板位置決め装置。
【請求項1】
鋼板等の一方の金属板の端面や、この一方の金属板に形成された孔部や切欠き部の縁の面に、鋼板等の他方の金属板を前記一方の金属板に対して垂直ないし垂直に近い状態で取り付ける際の該他方の金属板の位置決め装置であって、
クレーンやロボットなどの移送手段に回転可能に支持されて、水平方向及び鉛直方向に移動可能とした装置基部と、
この装置基部に対して該装置基部の回転軸と直交する方向の軸回りに回動可能に支持されて、前記他方の金属板を保持解放する金属板保持部と、
この金属板保持部に前記他方の金属板が保持された状態で、該金属板保持部に対する前記他方の金属板の位置及び姿勢を検出する金属板位置検出手段と、
前記一方の金属板の近傍に位置した段階で、前記装置基部に設定された基準点から前記一方の金属板までの距離を計測する距離測定手段を備えている
ことを特徴とする金属板位置決め装置。
【請求項2】
前記金属位置検出手段は、他方の金属板の端面と接触することで位置及び姿勢を検出する位置決め体である請求項1に記載の金属板位置決め装置。
【請求項3】
前記位置決め体を他方の金属板の端面に接近離間させる位置決め体駆動機構を備えている請求項2に記載の金属板位置決め装置。
【請求項4】
前記金属位置検出手段は、他方の金属板の縁の位置を認識することで位置及び姿勢を検出するセンサである請求項1に記載の金属板位置決め装置。
【請求項5】
前記センサを他方の金属板の縁に接近離間させるセンサ駆動機構を備えている請求項4に記載の金属板位置決め装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2010−264865(P2010−264865A)
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願番号】特願2009−117551(P2009−117551)
【出願日】平成21年5月14日(2009.5.14)
【出願人】(000000099)株式会社IHI (5,014)
【出願人】(502422351)株式会社アイ・エイチ・アイ マリンユナイテッド (159)
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願日】平成21年5月14日(2009.5.14)
【出願人】(000000099)株式会社IHI (5,014)
【出願人】(502422351)株式会社アイ・エイチ・アイ マリンユナイテッド (159)
[ Back to top ]