
針抜け検知装置
【課題】 特に針抜け検知装置の感度を一定することができる針抜け検知装置を提供することを目的とする。
【解決手段】 例えば磁気センサ5を第1の支持部2にて支持し、チューブの先端に医療用針を備えた医療器具を取り付けるための取り付け部3を備える第1の構成部Aと、磁石6を第2の支持部4にて支持してなる第2の構成部Bと、磁気センサと磁石との間の距離L1を一定に保つように第1の構成部Aと第2の構成部Bとを保持し、第1の構成部Aを医療器具に取り付け、第2の構成部Bを人体に取り付けた後、第1の構成部Aと第2の構成部Bとの間を分離することが可能な保持シート(保持部)20とを有することを特徴とする。
【解決手段】 例えば磁気センサ5を第1の支持部2にて支持し、チューブの先端に医療用針を備えた医療器具を取り付けるための取り付け部3を備える第1の構成部Aと、磁石6を第2の支持部4にて支持してなる第2の構成部Bと、磁気センサと磁石との間の距離L1を一定に保つように第1の構成部Aと第2の構成部Bとを保持し、第1の構成部Aを医療器具に取り付け、第2の構成部Bを人体に取り付けた後、第1の構成部Aと第2の構成部Bとの間を分離することが可能な保持シート(保持部)20とを有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人体からの針抜けを検知することができる針抜け検知装置に関する。
【背景技術】
【0002】
従来、医療機関にて例えば人工透析施術時に医療用針が抜ける事故が発生していた。このような事故を防止するため以下の特許文献には針抜けを検知するための針抜け検知装置が開示されている。
【0003】
例えば特許文献1のように磁気検知部と磁石とを備えた針抜け検知装置では、磁気検知部及び磁石の一方が医療用針側に取り付けられ、他方が人体側に取り付けられている。そして医療用針が人体から抜けると磁気検知部と磁石との間の距離が変動することで、磁石から磁気検知部に与える外部磁界が変動し、これにより、磁気検知部からの出力が変動することで、針が抜けたと判断できる。
【0004】
しかしながら、磁気検知部と磁石とを備えた従来の針抜け検知装置では、例えば看護士が、磁気検知部と磁石とを別々に取り付けなければならず、そのために磁気検知部と磁石との間の距離が取り付ける人によって変ってしまい、針抜け検知装置の感度が一定にならない問題があった。すなわち取り付け方によって医療用針がわずかにずれただけでも針抜けと判断されたり、医療用針がかなり移動しなければ針抜けと判断されない等、感度を一定にすることが出来なかった。
【0005】
そして、各特許文献に記載された針抜け検知装置では、針抜け検知装置の感度を一定するための構成について開示されていない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−201096号公報
【特許文献2】特開2010−63655号公報
【特許文献3】WO09/031560
【特許文献4】特開2007−621号公報
【特許文献5】US2009/00886A1
【発明の概要】
【発明が解決しようとする課題】
【0007】
そこで本発明は、上記従来の課題を解決するためのものであり、特に針抜け検知装置の感度を一定にすることができる針抜け検知装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明における針抜け検知装置は、
磁気センサあるいは磁界発生部の一方を第1の支持部にて支持し、さらに医療用針を備えた医療器具を取り付けるための取り付け部を備える第1の構成部と、
前記磁気センサあるいは前記磁界発生部の他方を第2の支持部にて支持してなる第2の構成部と、
前記磁気センサと前記磁界発生部との間の距離を一定に保つように前記第1の構成部と前記第2の構成部とを保持し、前記第1の構成部を前記医療器具に取り付け、前記第2の構成部を人体に取り付けた後、前記第1の構成部と前記第2の構成部との間を分離することが可能な保持部と、
を有することを特徴とするものである。
【0009】
本発明の針抜け検知装置は、例えば看護士が、保持部により磁界発生部と前記磁気センサとの間の距離が一定に保たれた状態で、第1の構成部を医療器具に取り付け、第2の構成部を患者の人体に取り付けることができる。続いて、保持部を取り除くことで第1の構成部と第2の構成部との間を分離した状態にできる。このようにして針抜け検知装置をセットした後、人体の動き等により医療用針が人体から抜けたり、あるいは抜けそうな状態となったとき、医療器具に取り付けられた第1の構成部が基準位置(初期位置)から移動するため、磁界発生部と磁気センサとの距離が変動し、この変動による外部磁界の変動を磁気センサにて検知し、これにより針抜けを高感度で検知することができる。
【0010】
本発明での保持部は、磁界発生部と前記磁気センサとの間の距離を一定に保つとともに、第1の構成部と第2の構成部との間を分離できるものであり、これにより、本発明の針抜け装置を設置者の誰もが磁界発生部と前記磁気センサとの間の距離を一定に保った状態でセットすることが出来、針抜けを一定の感度で検知することができる。
【0011】
本発明では、前記保持部は、前記第1の構成部と前記第2の構成部との双方に貼着して前記磁気センサと前記磁界発生部との間の距離を一定に保ち、前記第1の構成部を前記医療器具に取り付け、前記第2の構成部を人体に取り付けた後、剥離可能な粘着層を備える保持シートであることが好ましい。これにより簡単な構造にできるとともに、第1の構成部と第2の構成部間を分離しやすい。
【0012】
また本発明では、前記保持部は、前記第1の支持部と前記第2の支持部との間に位置して前記第1の支持部と前記第2の支持部とを一体の支持部として保持し、前記第1の構成部を前記医療器具に取り付け、前記第2の支持部を人体に取り付けた後、前記第1の支持部と前記第2の支持部との間を切り離すことが可能な脆弱接続部である構成にもできる。このとき、前記脆弱接続部はミシン目であることが好ましい。第1の支持部、第2の支持部及び保持部(ミシン目)を一体的に形成できるため低コストで製造できる。
【0013】
本発明では、前記取り付け部は、前記医療器具の少なくも周囲の一部を挟んで固定する構成であることが好ましい。これにより医療器具を適切且つ簡単に固定支持できる。
【0014】
また本発明では、前記取り付け部は、前記医療器具上から前記医療器具を挟み込むことが可能な構造であることが好ましい。これにより、医療器具上から取り付け部を覆い被せながら医療器具を簡単に固定支持できる。
【0015】
また本発明では、前記取り付け部は、前記医療器具を挟み込む挟持部と、指で把持可能な把持部とを備えたクリップ構造であることが好ましい。
【0016】
また本発明では、前記第1の構成部では、前記取り付け部の横に前記磁界発生部あるいは前記磁気センサが設置されることが好ましい。これにより、第1の構成部を医療器具に取り付け、第2の構成部を人体に取り付けた際、磁界発生部と磁気センサとを略平面方向に対向させることができ、これにより磁気センサに磁界発生部から平面方向への外部磁界を与えやすくなる。特に平面方向への磁場を検知するGMR素子を磁気センサに内蔵する場合に好ましい形態である。
【0017】
あるいは本発明では、前記第1の構成部では、前記取り付け部と前記磁界発生部あるいは前記磁気センサとが高さ方向に重ねて設けられる構成でもよい。
【0018】
また本発明では、前記磁界発生部及び前記磁気センサは、各支持部に予め固定支持されていることが好ましい。これにより、磁界発生部及び前記磁気センサを各支持部に設置する作業を無くすことができ、第1の構成部を医療器具に取り付け、第2の構成部を人体に取り付け、更に保持部を取り除いて第1の構成部と第2の構成部間を分離する簡単な作業により針抜け検知装置をセットできる。
【0019】
また本発明では、前記第1の支持部あるいは前記第2の支持部の少なくとも一方には、前記磁界発生部あるいは前記磁気センサの少なくとも一方を収納するための収納部が設けられている構成とすることもできる。
【0020】
また本発明では、前記第1の支持部あるいは前記第2の支持部の少なくとも一方には、前記磁界発生部あるいは前記磁気センサの少なくとも一方を収納するための収納部が設けられており、
前記保持シートにより、前記収納部の開口の少なくとも一部が塞がれており、前記保持シートを剥離することで前記収納部に前記磁界発生部あるいは前記磁気センサが収納可能とされる構成とすることができる。これにより保持シートの剥がし忘れを防止できる。
上記において、前記収納部を、前記磁気センサのためのコネクタ部にて構成できる。
【0021】
また本発明では、前記人体に取り付けることが可能な、前記磁気センサからの検知信号を処理するための検知器を備える構成にできる。これにより小型の針抜け検知装置を実現できる。
【0022】
また本発明では、前記磁気センサはGMR素子を備えることが好ましい。磁気センサはGMR素子やホール素子等を問わないが、GMR素子であると、高精度な検知を行うことができ、針が抜けそうな出血前の状態でも適切に判断できる。
【発明の効果】
【0023】
本発明の針抜け検知装置によれば、針抜けを一定の感度で検知することができる。
【図面の簡単な説明】
【0024】
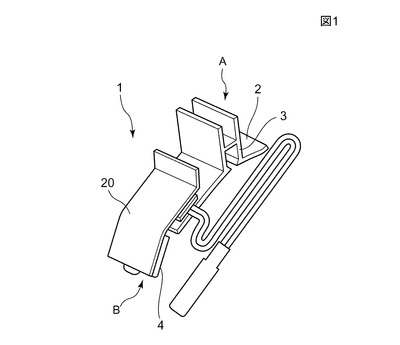
【図1】図1は、第1実施形態における針抜け検知装置の斜視図である。
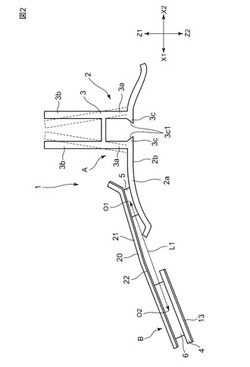
【図2】図2は、図1に示す針抜け検知装置の拡大正面図である。
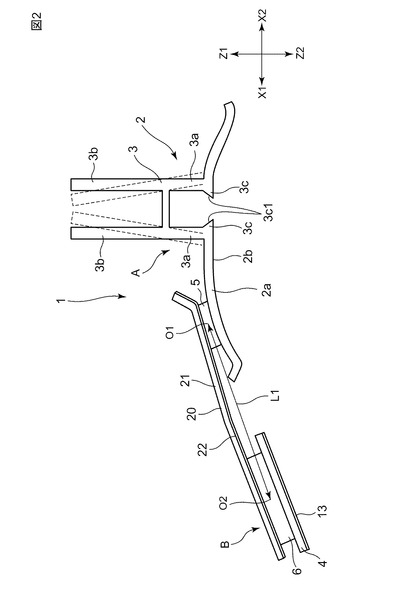
【図3】図3は、医療用チューブを取り付けるためのクリップ部(取り付け部)の縦断面図を示し、(a)(b)は医療用チューブの取り付け動作を示す図である。
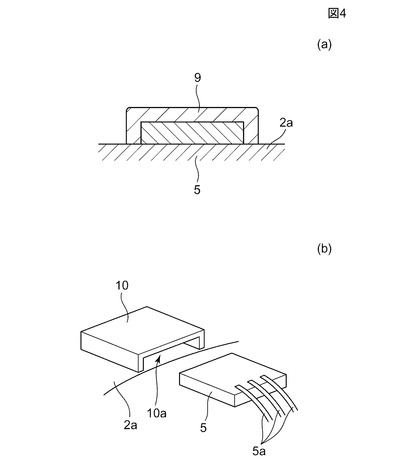
【図4】図4(a)は、支持部に予め固定支持された状態の磁気センサを示す部分拡大縦断面図であり、図4(b)は、支持部に設けられたコネクタ部に磁気センサを挿入する状態を示す部分拡大斜視図である。
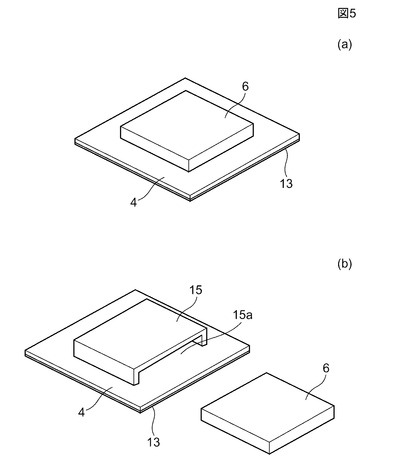
【図5】図5(a)は、支持部に予め固定支持された状態の磁石(磁界発生部)を示す拡大斜視図であり、図5(b)は、支持部に設けられた収納部に磁石を挿入する状態を示す拡大斜視図である。
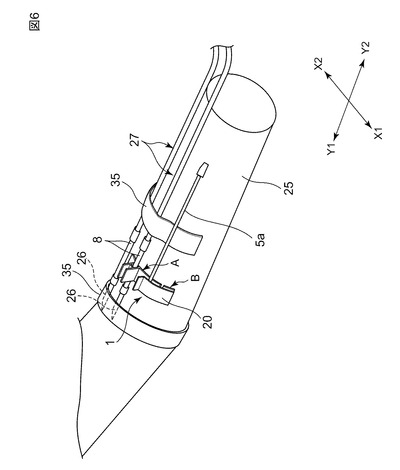
【図6】図6は、第1の実施形態の針抜け検知装置を患者に装着し、保持シートを取り外す前の状態を示す斜視図である。
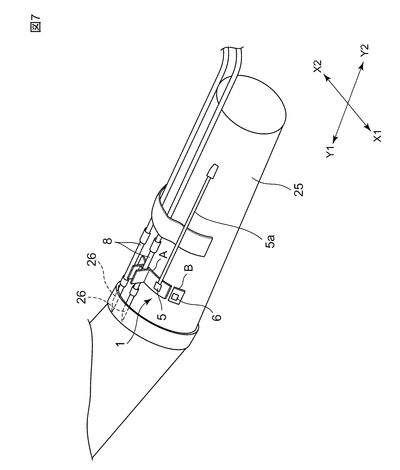
【図7】図7は、図6の状態から保持シートを取り外した状態を示す斜視図である。
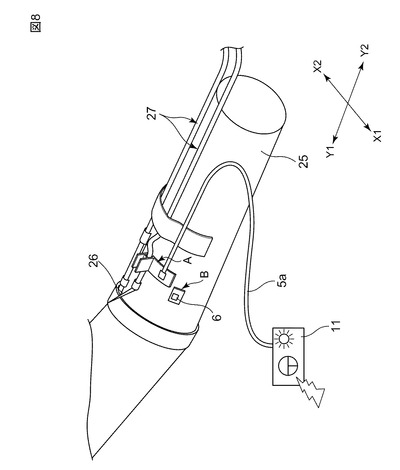
【図8】図8は、針抜け状態を示す斜視図である。
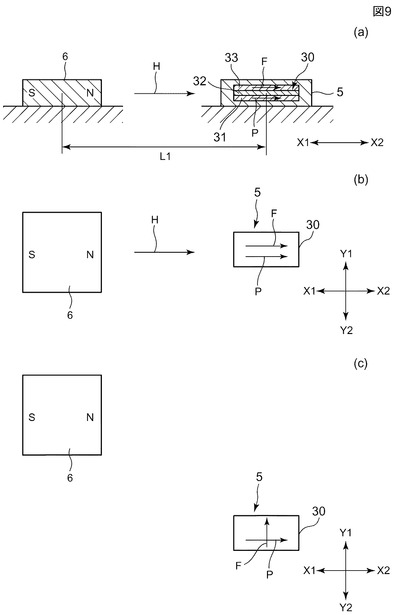
【図9】図9(a)は、図7の磁石と磁気センサとの位置関係を示し、図9(b)は、図8の医療用針が抜けたときの磁石と磁気センサとの位置関係を示す拡大縦断面図である。
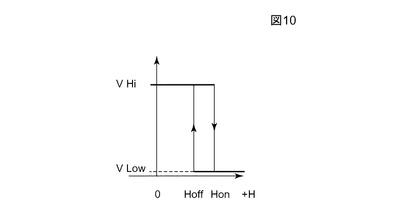
【図10】図10は、磁気センサにおける外部磁界と出力との関係の一例を示す出力状態図である。
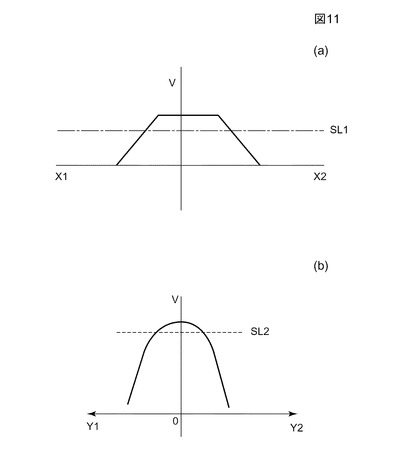
【図11】図11(a)は、医療用針のX方向の位置と磁気センサの出力との関係の一例を示す出力状態図であり、図11(b)は、医療用針のY方向の位置と磁気センサの出力との関係の一例を示す出力状態図である。
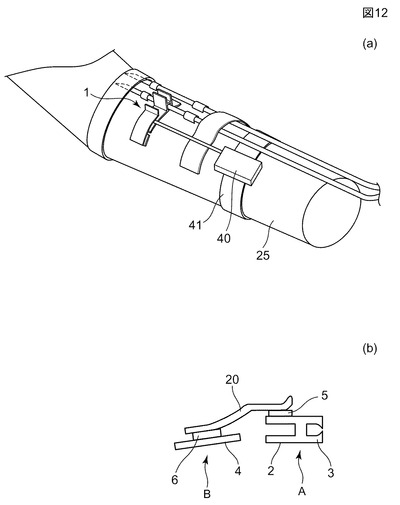
【図12】図12(a)は、第1の実施形態の針抜け検知装置に検知器を手首近辺に取り付けることができるようにした斜視図であり、図12(b)は、第1の実施形態の第1の構成部Aの構成を変更した正面図である。
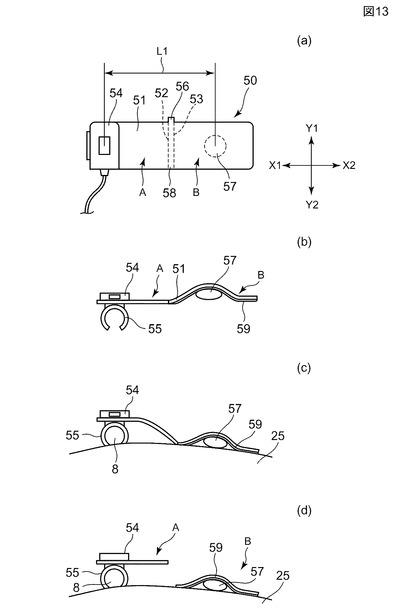
【図13】図13は、第2の実施形態における針抜け検知装置を示し、図13(a)は平面図、図13(b)は正面図、図13(c)は、図13(b)の針抜け検知装置を患者に装着した状態を示す正面図、図13(d)は、切り取り線から第1の支持部と第2の支持部とを分離した状態を示す正面図である。
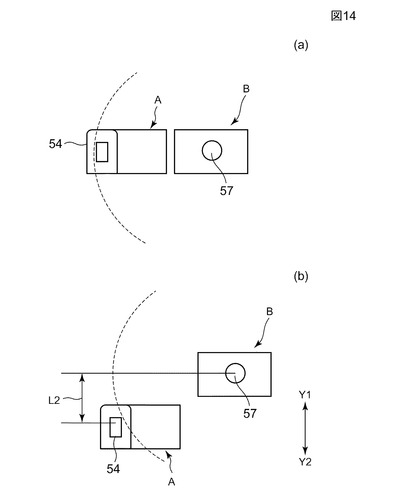
【図14】図14(a)は、図13(d)の患者に針抜け検知装置をセットした状態(針抜けなし)の平面図を示し、図14(b)は、医療用針が抜けて磁石と磁気センサとの距離が変化した状態を示す平面図である。
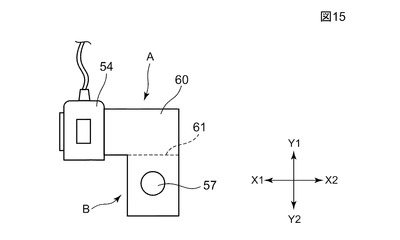
【図15】図13(a)とは一部形状が異なる実施形態を示す針抜け装置の平面図である。
【発明を実施するための形態】
【0025】
図1は、第1実施形態における針抜け検知装置の斜視図である。図2は、図1に示す針抜け検知装置の拡大正面図である。各図におけるY1−Y2方向は本実施形態の針抜け検知装置を患者に装着した際の患者の腕の延びる方向を指し、X1−X2方向はY1−Y2方向に対して直交する方向であり、腕の幅方向である。またZ1−Z2方向は高さ方向を指す。
【0026】
本実施形態における針抜け検知装置1は、例えば人工透析施術時の針抜けを検知するためのものである。
【0027】
図1,図2に示す針抜け検知装置1は、第1の支持部2、チューブの先端に医療用針を備えた医療器具を取り付けるための取り付け部3、及び磁気センサ5を備える第1の構成部Aと、第2の支持部4及び磁石(磁界発生部)6を備える第2の構成部Bと、保持シート20と、を有して構成される。
【0028】
第1の支持部2はプラスチック等による成形品であり、取り付け部3と、取り付け部3の横に磁気センサ5の設置部2aを備える。
【0029】
取り付け部3は、医療器具を挟み込む挟持部3aと、指で把持可能な把持部3bを備えたクリップ構造である。把持部3bは挟持部3aの上方(Z1)に位置し、挟持部3aが下方(Z2)に向いている。挟持部3aが患者に針抜け検知装置1を設置する際の腕側に位置している。
【0030】
図2の点線に示すように把持部3bの上方側のX1−X2方向への間隔を狭める方向に力を加えることで、挟持部3aの下方側のX1−X2方向への間隔を広げることができる。
【0031】
図1,図2に示すクリップ構造の取り付け部3とすることで、図3(a)に示すように、把持部3bを指で押して挟持部3aの下方側を広げた状態で医療器具を構成するチューブ8を上方から挟み込み、図3(b)では把持部3bへの押圧力を除去して挟持部3aを元の状態に戻すことで、挟持部3aを介して第1の構成部Aをチューブ8に簡単且つ確実に取り付けることができる。
【0032】
図2に示すように、取り付け部3の挟持部3aの底面には、挟持部3aのX1−X2方向への間隔を狭めるように内側に突き出す突部3c,3cが形成されている。突部3c,3cの上面は傾斜面3c1,3c1とされており、図3(a)から図3(b)のように挟持部3aが閉じる際に、傾斜面3c1,3c1がチューブ8の外周面の底面付近を摺動し挟持部3aにて簡単且つ確実にチューブ8を包み込んで固定支持できる。
【0033】
図1,図2に示す第1の支持部2には、取り付け部3から一方向(略X1方向)に略一定厚で延出する設置部2aを備える。設置部2aには磁気センサ5を設置可能な広さのスペースがあり、例えば磁気センサ5は設置部2a上に接着層を介して予め固定支持されている。すなわち磁気センサ5は、購入段階で既に設置部2aに取り付けられており、看護士等がわざわざ設置部2a上に磁気センサ5をセットする必要はない。図4(a)は、第1の支持部2に予め固定支持された状態の磁気センサ5を示す部分拡大縦断面図であり、磁気センサ5の上面及び側面が保護層(被覆層)9により覆われた状態とされている。保護層9には保護フィルム等を選択できるが、保護層9が無くてもよい。あるいは、図4(b)の部分拡大斜視図に示すように、第1の支持部2の設置部2aには、正面に開口10aを備える収納部10が設けられており、収納部10に磁気センサ5を挿入する形態とすることも可能である。図4(b)に示すように磁気センサ5には配線部(ケーブル)5aが接続されており、配線部5aは例えば図8に示す検知器11に電気的に接続されている。検知器11では、磁気センサ5の検知信号を電気的に処理して針抜け状態であるか否かを検知し、針抜け状態と判断したらブザーを鳴らしたりランプを点灯させたりできる。
【0034】
磁気センサ5を収納するための収納部10をコネクタ部とすることも可能である。すなわち磁気センサ5をコネクタ部に挿入して磁気センサ5と検知器11とが電気的に接続される形態とすることもできる。
【0035】
図4(b)の構成では、針抜け検知装置1を患者にセットする際、磁気センサ5を図4(b)に示す収納部(コネクタ部)10に挿入することが必要である。このとき、磁気センサ5が挿入されていなければ、磁気センサ5と検知部11とが電気的に非接続の状態にあり、あるいは磁気センサ5が磁石6の外部磁界を検知できない状態にある。したがって、磁気センサ5と検知部11との接続状態や磁気センサ5から出力された信号を基に例えばアラームが鳴るようにしておくことで、磁気センサ5の挿入し忘れを防止できる。
【0036】
図2に示すように、第1の支持部2の底面2bは、人間の腕の形状に概ね倣うようにやや湾曲した形状である。
【0037】
図1,図2に示す第2の支持部4は、例えば樹脂シートであり、第2の支持部4の裏面には粘着層13が設けられている。第2の支持部4を第1の支持部2と同じ材質としてもよいし、異なる材質とすることもできる。図2には図示されていないが、粘着層13の裏面には剥離紙が設けられており、剥離紙を剥がして患者の腕に第2の支持部4を貼り付ける。
【0038】
図2に示すように、第2の支持部4の上面には外部磁界発生部としての磁石6が固定支持されている。第2の支持部4は磁石6を支持できる程度の大きさを備える。
【0039】
例えば図5(a)の拡大斜視図に示すように、磁石6は第2の支持部4上に接着層を介して予め固定支持されている。すなわち看護士等がわざわざ第2の支持部4上に磁石6を設置する必要はない。あるいは、図5(b)の拡大斜視図に示すように、第2の支持部4の上面には正面に開口15aを備える収納部15が設けられており、収納部15に磁石6を挿入する形態とすることも可能である。
【0040】
図5(b)の構成では、針抜け検知装置1を患者にセットする際、磁石6を図5(b)に示す収納部15に挿入することが必要である。磁石6を収納部15に挿入しないと、磁気センサ5が磁石6の外部磁界を検知できない状態にあるため、磁気センサ5は針抜け状態の信号を出し続ける。したがって磁気センサ5から出力された信号を基にアラームを鳴らすなどして磁石6がセットされていないことを知らせることができる。
【0041】
図1,図2に示すように本実施形態の針抜け検知装置1では、第1の構成部Aと第2の構成部Bとの間を保持する保持シート(保持部)20を備える。本実施形態では、第1の構成部Aに設けられた磁気センサ5と第2の構成部Bに設けられた磁石6との間の距離L1を一定に保つように第1の構成部Aと第2の構成部Bとを剥離可能な保持シート20で保持する点に特徴的部分がある。
【0042】
ここでいう一定の距離L1とは、磁気センサ5の中心O1と、磁石6の中心O2との間の直線的な距離を指す。
【0043】
図2に示すように保持シート(保持板)20は、例えば樹脂シート21の裏面に粘着層22を備えた構成である。なお保持シート20の粘着力は、第2の支持部4の裏面に設けられた粘着層13の粘着力より弱い。
【0044】
保持シート20を構成する樹脂シート21はある程度の剛性があったほうがよい。すなわち樹脂シート21が柔軟性に優れた材質の場合、保持シート20の部分が撓んだ状態で、第1の構成部Aを医療器具に、第2の構成部Bを人体に取り付けてしまうことがある。この場合、磁石6と磁気センサ5との間の距離がL1から変わってしまうため(L1より小さくなる)、保持シート20に剛性を持たせることで、針抜け検知装置1を患者にセットする際、磁石6と磁気センサ5との間の距離を適切L1に保つことができる。
【0045】
図6ないし図8の斜視図を用いて本実施形態における針抜け検知装置1の人体への設置方法及び針抜けの検知状態を説明する。
【0046】
図6に示すように、チューブ8の先端に医療用針26を備えた医療器具27を二本用意し、各医療用針26を患者の腕25の血管に穿刺する。そして、各医療用針26及びチューブ8を夫々、粘着性テープ35,35で腕25に止める。医療用針26の一方は動脈用、他方が静脈用であり、静脈用に本実施形態の針抜け検知装置1がセットされる。
【0047】
本実施形態の針抜け検知装置1は、図1,図2で示すように、第1の構成部Aと第2の構成部Bとが保持シート20で保持されており、磁気センサ5と磁石6との間の距離L1が一定に保たれている。図6に示すように、保持シート20にて保持された第1の構成部Aを、一方の医療器具27を構成するチューブ8の医療用針26に近い位置に取り付ける。取り付け方は既に図3で説明した通りである。すなわち例えば第1の構成部Aに設けられた取り付け部3はクリップ構造であり、チューブ8の上方からチューブ8を取り付け部3の挟持部3aにて挟み込むことで簡単に第1の構成部Aをチューブ8に取り付けることができる。
【0048】
一方、第2の構成部Bでは、粘着層13の裏面に設けられた剥離紙を剥がした後、粘着層13を介して第2の構成部Bを患者の腕25に貼り付ける。このとき、第1の構成部Aと第2の構成部Bとの間を保持する保持シート20により磁気センサ5と磁石6との間の距離L1は一定に保たれている。
【0049】
続いて保持シート20を剥がす。剥がした状態が図7である。図7の状態が患者に対して針抜け検知装置1がセットされた状態である。図7に示すように保持シート20を剥がすことで、第1の構成部Aと第2の構成部Bとが分離された状態となる。
【0050】
磁気センサ5に接続される配線部(ケーブル)5aは図8に示すように検知器11に接続される。
【0051】
そして図8に示すように、医療用針26が患者の腕25から抜けると第1の構成部Aの位置が図7の基準状態(初期状態)から変動し、磁気センサ5と磁石6との間の距離が変化する。これにより針抜けを検知し、検知器11では針抜け検知の際、ブザーが鳴ったり、ランプが点灯したりするようにして針抜けを早く医療従事者や患者等に知らせることができる。
【0052】
本実施形態では、第1の構成部Aと第2の構成部Bとを剥離可能な保持シート20で保持しており、これにより本実施形態の針抜け検知装置1を、磁気センサ5と磁石6との間の距離L1を一定に保った状態で患者にセットすることができる。また針抜け検知装置1のセットの煩わしさを抑制できる。すなわち保持シート20にて第1の構成部Aと第2の構成部Bとが保持された状態であるため、磁気センサ5と磁石6との間の距離L1を一定に保ちながら、第1の構成部Aの医療器具への取り付けと、第2の構成部Bの人体への貼着とを簡単且つスピーディに行うことが出来る。
【0053】
続いて磁気センサ5の内部構造及び動作原理について説明する。図9(a)(b)は、図7(基準状態)の磁石と磁気センサとの位置関係を示し、図9(a)は、縦断面図を示し、図9(b)は平面図を示す。
【0054】
図9(a)に示すように磁気センサ5には、GMR素子30が内蔵されている。GMR素子30は、固定磁性層31、非磁性材料層32及びフリー磁性層33の積層構造を備える。図示しないが固定磁性層31の下面側にはIrMnやPtMnよりなる反強磁性層が設けられ、NiFeやCoFe等の軟磁性層からなる固定磁性層31との間で交換結合磁界(Hex)が生じる構成であることが好ましい。固定磁性層31の磁化方向Pは一方向に固定される。この実施形態では固定磁性層31の磁化方向はX2方向に固定されている。非磁性材料層32はCu等で形成される。フリー磁性層33はNiFe等の軟磁性材料で形成される。フリー磁性層33には図示しないバイアス層からのバイアス磁界が供給されて、フリー磁性層33の磁化は一方向に揃えられる。例えばフリー磁性層33の磁化は固定磁性層31の磁化方向に対して直交方向である。またフリー磁性層33の上面には図示しないTa等の保護層が形成される。
【0055】
図9(b)に示すY1−Y2方向は、例えば図7に示すように腕25の延出方向であり、X1−X2方向はY1−Y2方向に直交する幅方向である。
【0056】
さて図9(a)(b)は磁気センサ5と磁石6とのX1−X2方向への距離L1が一定に保たれた基準状態(初期状態)である。磁石6の構成を特に規定するものでないが、基準状態において、磁気センサ5には磁石6から略平面方向(X方向とY方向とで構成される平面)への外部磁界Hが作用するようにされている。
【0057】
図9(a)(b)に示すように磁石6から磁気センサ5にはX2方向に外部磁界Hが作用している。この外部磁界Hを受けてフリー磁性層33の磁化方向FはX2方向に向けられる。したがって、固定磁性層31の磁化方向Pとフリー磁性層33の磁化方向Fとが同一方向となるため、磁化方向P,Fが互いに直交した状態よりも電気抵抗値が小さくなった状態となっている。なお、固定磁性層31の磁化方向PがX1方向であれば、固定磁性層31とフリー磁性層33との磁化関係は反平行になるから電気抵抗値は大きくなる。
【0058】
また図9(a)(b)に示す配置はあくまでも一例であり、例えば磁石6及び磁気センサ5を図9(a)(b)の状態から90度回転させた配置とすることもできる。
【0059】
図9(c)は、図8のように医療用針26が腕25から抜けたときの磁石6と磁気センサ5(GMR素子30)との位置関係を示す平面図である。医療用針26が患者の腕25から抜けて医療器具27がY2方向に移動すると、医療器具27のチューブ8に取り付けられた第1の構成部Aも医療器具27とともにY2方向に移動する(図8参照)。したがって第1の構成部Aに支持された磁気センサ5(GMR素子30)は、図9(a)(b)の基準状態(初期状態)からY2方向に移動する。この結果、磁気センサ5と磁石6との間の距離が変動し、具体的には磁気センサ5は磁石6から遠ざかる。このため、磁石6からの外部磁界Hが磁気センサ5に作用せず、あるいは作用する外部磁界Hの大きさが基準状態のときよりも小さくなるため、フリー磁性層33の磁化方向Fは、フリー磁性層33に作用しているGMR素子30内でのバイアス磁界によって固定磁性層31の磁化方向Pに対して略直交方向に向く(図9(c))。この結果、GMR素子30の電気抵抗値は図9(b)の基準状態から大きくなる。なお固定磁性層31の磁化方向PがX1方向にある形態では、図9(b)の基準状態から図9(c)の針抜け状態に移行すると磁気センサ5の電気抵抗値は小さくなる。
【0060】
図10は磁気センサ5の動作の一例を示す。横軸が外部磁界の大きさを示し縦軸が磁気センサ5の出力である。外部磁界Hがゼロの状態、すなわち外部磁界Hが磁気センサ5に作用していない状態では、磁気センサ5の出力がHiとなっている。外部磁界Hが徐々に+Hに向けて大きくなり、外部磁界HがHonの大きさになると出力はLowとなり、ON信号が出力される。その状態から徐々に外部磁界Hが小さくなり、外部磁界HがHoffの大きさとなると出力はHiとなり、OFF信号が出力される。
【0061】
図10の動作特性を有する磁気センサ5では、磁石6との距離が一定に保たれた基準状態(初期状態)では、出力がLowレベルにあり、ON信号が出力される状態にあるが、磁石6との距離が離れて出力がHiレベルになるとOFF信号が出力される。磁気センサ5のON信号、OFF信号の生成を検知器11で行うことができ、検知器11では、ON信号が出力された場合は針抜け状態に無いと判断し、OFF信号が出力された場合は、針抜け状態と判断する。
【0062】
図11(a)は、医療用針のX1−X2方向への移動位置と、磁気センサ5の出力との関係を示すグラフの一例である。なお医療用針の位置あるいはかなり近い位置に磁気センサ5が取り付けられており、図11(a)(b)の横軸の医療用針の移動距離はすなわち、磁気センサ5の移動距離と置き換ええることができる。
【0063】
磁気センサ5の内部には複数のGMR素子が配置されており、例えば、X1−X2方向検知用の各GMR素子の出力の和が図11(a)における縦軸とされている。医療用針の位置がゼロのとき医療用針の抜けはない。一方、医療用針が略抜け方向に動くと、それに伴って磁気センサ5も動く。例えば、医療用針がX1方向あるいはX2方向に移動することで磁気センサ5からは、図11(a)に示す出力変動を得ることができる。このとき検知器11では、第1のスレッショルドレベル(第1の閾値)SL1を備えており、出力が第1のスレッショルドレベル(第1の閾値)SL1を下回ったら針抜けと判断する。
【0064】
また、図11(b)は、医療用針のY1−Y2方向への移動位置と、磁気センサ5の出力との関係を示すグラフである。磁気センサ5の内部には複数のGMR素子が配置されており、例えば、Y1−Y2方向検知用の各GMR素子の出力の差が縦軸とされている。医療用針の位置がゼロのとき医療用針の抜けはない。一方、医療用針がY1−Y2方向に動くと、それに伴って磁気センサ5を備える第1の構成部AもY1−Y2方向に動く。例えば、医療用針が針抜け方向であるY2方向に移動することで、磁気センサ5からは、図11(a)に示す出力変動を得ることができる。このとき検知器11では、第2のスレッショルドレベル(第2の閾値)SL2を備えており、出力が第2のスレッショルドレベル(第2の閾値)SL2を下回ったら針抜けと判断する。スレッショルドレベルは複数のレベルにあり、全てのスレッショルドレベルを下回りあるいは上回ったらON、OFFする形態にすることでノイズを小さくできる。
【0065】
どの出力レベルにスレッショルドレベルを置くかによって、検知感度を変えることができる。例えば、医療用針26が人体から完全に抜けていなくても抜けそうな状態を判断できる。また図11(a)(b)に示す2軸出力の組み合わせで針抜け状態の確実な判断を行うことができる。磁気センサ5を医療用針26に近い位置に取り付けることができ、これにより医療用針26の動きを適切に判断でき、針が抜けそうな状態を正確に判断して針抜けに伴う出血を事前に食い止めやすい。ただし医療用針26の発生する磁場の影響を磁気センサが受ける場合には、医療用針26の磁場計算を行い、磁気センサ5の感度調整を行うことが必要である。
【0066】
本実施形態では図6の状態から保持シート20を剥がして第1の構成部Aと第2の構成部Bとを分離するが、保持シート20の剥がし忘れを防止すべく、例えば導電性の保持シート20として第1の構成部Aと第2の構成部B間を保持シート20を介して導通状態にしておく。ただし、この導通により磁気センサ5に悪影響を及ぼす等するときは、磁気センサ5を絶縁層で保護する等して、導通の影響を受けないようにする。また導通状態を図8の検知器11にて検知できるようにしておき(なお導通状態を検知するための配線部は図示していない)、導通状態のままだとアラームが鳴るなど保持シート20を剥がしていないことを知らせるようにしておく。そして保持シート20を剥がして第1の構成部Aと第2の構成部B間を非導通状態にして初めてアラームが消えるようにセットしておくことで、保持シート20の剥がし忘れを防止できる。
【0067】
あるいは、図4(b)や図5(b)に示すように、磁気センサ5や磁石6を収納する収納部(コネクタ部)がある構成では、保持シート20の一部が収納部の開口位置にかかるようにしておく。磁気センサ5や磁石6を収納部内に設置しないとアラームが鳴り続けるようにしておくことで、磁気センサ5や磁石6の収納のし忘れを防止できるとともに、保持シート20を剥がさないと磁気センサ5や磁石6の収納できないため、保持シート20の剥がし忘れも防止できる。
【0068】
図12(a)は、第1の実施形態の針抜け検知装置1に検知器40を手首近辺に取り付けることができるようにした斜視図である。例えば検知器40を備えたベルト41を手首に巻くことで検知器40を備えた小型の針抜け検知装置1を実現できる。また図12(b)では、第1の構成部Aを横向きとした構成である。図12(b)では、横から第1の構成部Aの取り付け部3を医療器具に取り付ける。
【0069】
図13は、第2の実施形態における針抜け検知装置を示し、図13(a)は平面図、図13(b)は正面図、図13(c)は、図13(b)の針抜け検知装置を患者に装着した状態を示す正面図、図13(d)は、切り取り線から第1の支持部と第2の支持部とを分離した状態を示す正面図である。
【0070】
図13に示す針抜け検知装置50では、一枚の支持体(支持シート)51のX1−X2方向の中間にY1−Y2方向に直線状に延びるミシン目(脆弱接続部)52,53が複数並設されている。ミシン目52,53の位置及び各ミシン目52,53間の領域を含めて本実施形態の保持部58を構成する。図13(a)に示すように、保持部58にはY1方向にとび出した摘み部56が設けられる。図13(a)に示すように、ミシン目52を境界としてX2側に第1の構成部Aが位置し、ミシン目53を境界としてX1側に第2の構成部Bが位置する。そして本実施形態では、各構成部A,B及び保持部58が一体形成されている。
【0071】
図13(a)(b)に示すように第1の構成部Aの支持体51の上面側に磁気センサ54が設置されており、第1の構成部Aの下面側に医療器具を取り付けるための取り付け部55が設けられている。図13(a)(b)に示すように第2の構成部Bの支持体51の下面側に磁石57が支持されている。なお磁石57は支持体51の上面側に設置されてもよい。
【0072】
第2の構成部Bでは、支持体51の裏面に粘着層59が設けられている。図示しないが粘着層59の裏面には剥離層が設けられ、人体に第2の構成部Bを貼り付ける際に前記剥離層を剥がす。
【0073】
図13(a)に示す磁気センサ54と磁石57のX1−X2方向の距離L1は一定に保たれている。
【0074】
図13(c)に示すように、チューブ8の先端に医療用針26を備えた医療器具27(図6等参照)の前記医療用針26に近いチューブ8の部分を取り付け部55に取り付け、さらに磁石57を備える第2の構成部Bを患者の腕25に貼着する。上記したように、支持体51の裏面には第2の構成部Bの位置に粘着層59があり、また粘着層59の裏面には図示しない剥離紙が設けられている。針抜け検知装置50をセットする際には、前記剥離紙を剥がし、粘着層59を介して第2の構成部Bを腕25に貼り付けることができる。
【0075】
そして図13(a)に示す摘み部56を指で摘んでミシン目52,53に沿ってミシン目52、53の間の保持部58を切り取る。これにより図13(d)に示すように第1の構成部Aと第2の構成部Bとを分離できる。
【0076】
ミシン目は一本だけでもよい。かかる場合、ミシン目(脆弱接続部)の位置が本実施形態における「保持部」に該当する。ただし、図13(a)に示すようにミシン目52,53を二本並設し、さらにミシン目52,53の間から摘み部56を外方に突出させることで、簡単に第1の構成部Aと第2の構成部Bとの間を分離しやすい。
【0077】
図13に示す実施形態においても、磁気センサ54と磁石57との間の距離を一定に保った状態で人体に針抜け検知装置をセットすることができる。
【0078】
図14(a)は、図13(d)の患者に針抜け検知装置をセットした状態(針抜けなし)の平面図を示し、図14(b)は、医療用針が抜けて磁石と磁気センサとの距離が変化した状態を示す平面図である。
【0079】
図14(a)では、磁気センサ54に磁石57からの外部磁界が届いており(届いている範囲を点線で示す)、針抜けがないと判断する。一方、図14(b)のように針が抜けて磁気センサ54がY2方向にL2移動して、磁石57からの外部磁界が磁気センサ54に届かなくなると、針抜け状態と判断する。
【0080】
図13,図14に示す磁気センサ54も、図10,図11に示す出力動作を示し、針の抜けそうな状態も高精度に検知することができる。
【0081】
また図13(a)と異なって、図15のように、略90度に折れ曲がる支持体(支持シート)60を用いることもできる。図15では、ミシン目61(脆弱接続部)がX1−X2方向に沿って設けられている。ミシン目61を境界として一体に保持された第1の構成部Aの磁気センサ54と第2の構成部Bの磁石57とはX1−X2方向及びY1−Y2方向の各方向に対して斜めに傾いた方向で対向している。
【0082】
支持体(支持シート)60の形状は図13、図15に限定されるものでなくV字状やT字状等、限定されるものでない。
【0083】
図13(b)では、磁気センサ54と医療器具の取り付け部55とを高さ方向に重ねているが、図2等で示すように取り付け部3の横に磁気センサ5を配置するほうが、磁石6と磁気センサ5とを略平面配置でき、特に磁気センサ5にGMR素子30を用いた場合には有利である。
【0084】
また磁気センサ54にはGMR素子30を用いることもできるしホール素子等を用いることもできる。ただしGMR素子30を用いることで高精度な検知を行うことができ、例えば針の抜けそうな医療器具の動きとしては小さい状態でも適切に判断できる。
【0085】
医療器具の取り付け部の構成を限定するものでないが、医療器具の少なくとも周囲の一部を挟んで固定する構成であることが、医療器具を適切且つ簡単に第1の構成部Aに取り付けることができ好ましい。
【0086】
特に図2に示すように取り付け部3をクリップ構造にして、上から医療器具を挟み込むことで簡単に医療器具を取り付けることができる。
【0087】
本実施形態では第1の構成部Aに磁気センサを設置し、第2の構成部Bに磁石を設置したが逆であってもよい。
また外部磁界を生じる外部磁界発生部であれば磁石に限定されない。
【0088】
また、磁気センサ及び磁石は各構成部A,Bに夫々、予め固定支持された状態であることが望ましい。これにより、針抜け検知装置を設置する者がわざわざ磁石や磁気センサを各構成部A,Bに取り付ける必要性がなくなり、針抜け検知装置のセットが簡単になり好適である。
【0089】
なお本実施形態における「保持部」は、磁石(磁界発生部)と磁気センサとの間の距離を一定に保つものであるが、図4(b)や図5(b)のように磁石や磁気センサを収納部(コネクタ部)に後から収納する構成では、「保持部」が、各収納部間、あるいは、磁石と磁気センサを収納するための収納部(コネクタ部)間、または、磁気センサと磁石を収納するための収納部間の距離を一定に保っている。しかしながら結局、針抜け検知装置を患者にセットした最終形態では、磁石(磁界発生部)と磁気センサとの間の距離が一定に保たれることになるから、本実施形態では、後から収納部に磁石や磁気センサを収納する形態であっても、保持部は、磁石(磁界発生部)と磁気センサとの間の距離を一定に保つものとして定義される。
【符号の説明】
【0090】
A 第1の構成部
B 第2の構成部
F フリー磁性層の磁化方向
H 外部磁界
L1 磁気センサと磁石との間の距離
P 固定磁性層の磁化方向
1、50 針抜け検知装置
2 第1の支持部
3、55 取り付け部
3a 挟持部
3b 把持部
4 第2の支持部
5、54 磁気センサ
6、57 磁石
8 チューブ
10 収納部(コネクタ部)
11、40 検知部
13、59 粘着層
15 収納部
20 保持シート
25 腕
26 医療用針
27 医療器具
30 GMR素子
31 固定磁性層
33 フリー磁性層
51、60 支持体(支持シート)
52、53、61 ミシン目
58 保持部
【技術分野】
【0001】
本発明は、人体からの針抜けを検知することができる針抜け検知装置に関する。
【背景技術】
【0002】
従来、医療機関にて例えば人工透析施術時に医療用針が抜ける事故が発生していた。このような事故を防止するため以下の特許文献には針抜けを検知するための針抜け検知装置が開示されている。
【0003】
例えば特許文献1のように磁気検知部と磁石とを備えた針抜け検知装置では、磁気検知部及び磁石の一方が医療用針側に取り付けられ、他方が人体側に取り付けられている。そして医療用針が人体から抜けると磁気検知部と磁石との間の距離が変動することで、磁石から磁気検知部に与える外部磁界が変動し、これにより、磁気検知部からの出力が変動することで、針が抜けたと判断できる。
【0004】
しかしながら、磁気検知部と磁石とを備えた従来の針抜け検知装置では、例えば看護士が、磁気検知部と磁石とを別々に取り付けなければならず、そのために磁気検知部と磁石との間の距離が取り付ける人によって変ってしまい、針抜け検知装置の感度が一定にならない問題があった。すなわち取り付け方によって医療用針がわずかにずれただけでも針抜けと判断されたり、医療用針がかなり移動しなければ針抜けと判断されない等、感度を一定にすることが出来なかった。
【0005】
そして、各特許文献に記載された針抜け検知装置では、針抜け検知装置の感度を一定するための構成について開示されていない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−201096号公報
【特許文献2】特開2010−63655号公報
【特許文献3】WO09/031560
【特許文献4】特開2007−621号公報
【特許文献5】US2009/00886A1
【発明の概要】
【発明が解決しようとする課題】
【0007】
そこで本発明は、上記従来の課題を解決するためのものであり、特に針抜け検知装置の感度を一定にすることができる針抜け検知装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明における針抜け検知装置は、
磁気センサあるいは磁界発生部の一方を第1の支持部にて支持し、さらに医療用針を備えた医療器具を取り付けるための取り付け部を備える第1の構成部と、
前記磁気センサあるいは前記磁界発生部の他方を第2の支持部にて支持してなる第2の構成部と、
前記磁気センサと前記磁界発生部との間の距離を一定に保つように前記第1の構成部と前記第2の構成部とを保持し、前記第1の構成部を前記医療器具に取り付け、前記第2の構成部を人体に取り付けた後、前記第1の構成部と前記第2の構成部との間を分離することが可能な保持部と、
を有することを特徴とするものである。
【0009】
本発明の針抜け検知装置は、例えば看護士が、保持部により磁界発生部と前記磁気センサとの間の距離が一定に保たれた状態で、第1の構成部を医療器具に取り付け、第2の構成部を患者の人体に取り付けることができる。続いて、保持部を取り除くことで第1の構成部と第2の構成部との間を分離した状態にできる。このようにして針抜け検知装置をセットした後、人体の動き等により医療用針が人体から抜けたり、あるいは抜けそうな状態となったとき、医療器具に取り付けられた第1の構成部が基準位置(初期位置)から移動するため、磁界発生部と磁気センサとの距離が変動し、この変動による外部磁界の変動を磁気センサにて検知し、これにより針抜けを高感度で検知することができる。
【0010】
本発明での保持部は、磁界発生部と前記磁気センサとの間の距離を一定に保つとともに、第1の構成部と第2の構成部との間を分離できるものであり、これにより、本発明の針抜け装置を設置者の誰もが磁界発生部と前記磁気センサとの間の距離を一定に保った状態でセットすることが出来、針抜けを一定の感度で検知することができる。
【0011】
本発明では、前記保持部は、前記第1の構成部と前記第2の構成部との双方に貼着して前記磁気センサと前記磁界発生部との間の距離を一定に保ち、前記第1の構成部を前記医療器具に取り付け、前記第2の構成部を人体に取り付けた後、剥離可能な粘着層を備える保持シートであることが好ましい。これにより簡単な構造にできるとともに、第1の構成部と第2の構成部間を分離しやすい。
【0012】
また本発明では、前記保持部は、前記第1の支持部と前記第2の支持部との間に位置して前記第1の支持部と前記第2の支持部とを一体の支持部として保持し、前記第1の構成部を前記医療器具に取り付け、前記第2の支持部を人体に取り付けた後、前記第1の支持部と前記第2の支持部との間を切り離すことが可能な脆弱接続部である構成にもできる。このとき、前記脆弱接続部はミシン目であることが好ましい。第1の支持部、第2の支持部及び保持部(ミシン目)を一体的に形成できるため低コストで製造できる。
【0013】
本発明では、前記取り付け部は、前記医療器具の少なくも周囲の一部を挟んで固定する構成であることが好ましい。これにより医療器具を適切且つ簡単に固定支持できる。
【0014】
また本発明では、前記取り付け部は、前記医療器具上から前記医療器具を挟み込むことが可能な構造であることが好ましい。これにより、医療器具上から取り付け部を覆い被せながら医療器具を簡単に固定支持できる。
【0015】
また本発明では、前記取り付け部は、前記医療器具を挟み込む挟持部と、指で把持可能な把持部とを備えたクリップ構造であることが好ましい。
【0016】
また本発明では、前記第1の構成部では、前記取り付け部の横に前記磁界発生部あるいは前記磁気センサが設置されることが好ましい。これにより、第1の構成部を医療器具に取り付け、第2の構成部を人体に取り付けた際、磁界発生部と磁気センサとを略平面方向に対向させることができ、これにより磁気センサに磁界発生部から平面方向への外部磁界を与えやすくなる。特に平面方向への磁場を検知するGMR素子を磁気センサに内蔵する場合に好ましい形態である。
【0017】
あるいは本発明では、前記第1の構成部では、前記取り付け部と前記磁界発生部あるいは前記磁気センサとが高さ方向に重ねて設けられる構成でもよい。
【0018】
また本発明では、前記磁界発生部及び前記磁気センサは、各支持部に予め固定支持されていることが好ましい。これにより、磁界発生部及び前記磁気センサを各支持部に設置する作業を無くすことができ、第1の構成部を医療器具に取り付け、第2の構成部を人体に取り付け、更に保持部を取り除いて第1の構成部と第2の構成部間を分離する簡単な作業により針抜け検知装置をセットできる。
【0019】
また本発明では、前記第1の支持部あるいは前記第2の支持部の少なくとも一方には、前記磁界発生部あるいは前記磁気センサの少なくとも一方を収納するための収納部が設けられている構成とすることもできる。
【0020】
また本発明では、前記第1の支持部あるいは前記第2の支持部の少なくとも一方には、前記磁界発生部あるいは前記磁気センサの少なくとも一方を収納するための収納部が設けられており、
前記保持シートにより、前記収納部の開口の少なくとも一部が塞がれており、前記保持シートを剥離することで前記収納部に前記磁界発生部あるいは前記磁気センサが収納可能とされる構成とすることができる。これにより保持シートの剥がし忘れを防止できる。
上記において、前記収納部を、前記磁気センサのためのコネクタ部にて構成できる。
【0021】
また本発明では、前記人体に取り付けることが可能な、前記磁気センサからの検知信号を処理するための検知器を備える構成にできる。これにより小型の針抜け検知装置を実現できる。
【0022】
また本発明では、前記磁気センサはGMR素子を備えることが好ましい。磁気センサはGMR素子やホール素子等を問わないが、GMR素子であると、高精度な検知を行うことができ、針が抜けそうな出血前の状態でも適切に判断できる。
【発明の効果】
【0023】
本発明の針抜け検知装置によれば、針抜けを一定の感度で検知することができる。
【図面の簡単な説明】
【0024】
【図1】図1は、第1実施形態における針抜け検知装置の斜視図である。
【図2】図2は、図1に示す針抜け検知装置の拡大正面図である。
【図3】図3は、医療用チューブを取り付けるためのクリップ部(取り付け部)の縦断面図を示し、(a)(b)は医療用チューブの取り付け動作を示す図である。
【図4】図4(a)は、支持部に予め固定支持された状態の磁気センサを示す部分拡大縦断面図であり、図4(b)は、支持部に設けられたコネクタ部に磁気センサを挿入する状態を示す部分拡大斜視図である。
【図5】図5(a)は、支持部に予め固定支持された状態の磁石(磁界発生部)を示す拡大斜視図であり、図5(b)は、支持部に設けられた収納部に磁石を挿入する状態を示す拡大斜視図である。
【図6】図6は、第1の実施形態の針抜け検知装置を患者に装着し、保持シートを取り外す前の状態を示す斜視図である。
【図7】図7は、図6の状態から保持シートを取り外した状態を示す斜視図である。
【図8】図8は、針抜け状態を示す斜視図である。
【図9】図9(a)は、図7の磁石と磁気センサとの位置関係を示し、図9(b)は、図8の医療用針が抜けたときの磁石と磁気センサとの位置関係を示す拡大縦断面図である。
【図10】図10は、磁気センサにおける外部磁界と出力との関係の一例を示す出力状態図である。
【図11】図11(a)は、医療用針のX方向の位置と磁気センサの出力との関係の一例を示す出力状態図であり、図11(b)は、医療用針のY方向の位置と磁気センサの出力との関係の一例を示す出力状態図である。
【図12】図12(a)は、第1の実施形態の針抜け検知装置に検知器を手首近辺に取り付けることができるようにした斜視図であり、図12(b)は、第1の実施形態の第1の構成部Aの構成を変更した正面図である。
【図13】図13は、第2の実施形態における針抜け検知装置を示し、図13(a)は平面図、図13(b)は正面図、図13(c)は、図13(b)の針抜け検知装置を患者に装着した状態を示す正面図、図13(d)は、切り取り線から第1の支持部と第2の支持部とを分離した状態を示す正面図である。
【図14】図14(a)は、図13(d)の患者に針抜け検知装置をセットした状態(針抜けなし)の平面図を示し、図14(b)は、医療用針が抜けて磁石と磁気センサとの距離が変化した状態を示す平面図である。
【図15】図13(a)とは一部形状が異なる実施形態を示す針抜け装置の平面図である。
【発明を実施するための形態】
【0025】
図1は、第1実施形態における針抜け検知装置の斜視図である。図2は、図1に示す針抜け検知装置の拡大正面図である。各図におけるY1−Y2方向は本実施形態の針抜け検知装置を患者に装着した際の患者の腕の延びる方向を指し、X1−X2方向はY1−Y2方向に対して直交する方向であり、腕の幅方向である。またZ1−Z2方向は高さ方向を指す。
【0026】
本実施形態における針抜け検知装置1は、例えば人工透析施術時の針抜けを検知するためのものである。
【0027】
図1,図2に示す針抜け検知装置1は、第1の支持部2、チューブの先端に医療用針を備えた医療器具を取り付けるための取り付け部3、及び磁気センサ5を備える第1の構成部Aと、第2の支持部4及び磁石(磁界発生部)6を備える第2の構成部Bと、保持シート20と、を有して構成される。
【0028】
第1の支持部2はプラスチック等による成形品であり、取り付け部3と、取り付け部3の横に磁気センサ5の設置部2aを備える。
【0029】
取り付け部3は、医療器具を挟み込む挟持部3aと、指で把持可能な把持部3bを備えたクリップ構造である。把持部3bは挟持部3aの上方(Z1)に位置し、挟持部3aが下方(Z2)に向いている。挟持部3aが患者に針抜け検知装置1を設置する際の腕側に位置している。
【0030】
図2の点線に示すように把持部3bの上方側のX1−X2方向への間隔を狭める方向に力を加えることで、挟持部3aの下方側のX1−X2方向への間隔を広げることができる。
【0031】
図1,図2に示すクリップ構造の取り付け部3とすることで、図3(a)に示すように、把持部3bを指で押して挟持部3aの下方側を広げた状態で医療器具を構成するチューブ8を上方から挟み込み、図3(b)では把持部3bへの押圧力を除去して挟持部3aを元の状態に戻すことで、挟持部3aを介して第1の構成部Aをチューブ8に簡単且つ確実に取り付けることができる。
【0032】
図2に示すように、取り付け部3の挟持部3aの底面には、挟持部3aのX1−X2方向への間隔を狭めるように内側に突き出す突部3c,3cが形成されている。突部3c,3cの上面は傾斜面3c1,3c1とされており、図3(a)から図3(b)のように挟持部3aが閉じる際に、傾斜面3c1,3c1がチューブ8の外周面の底面付近を摺動し挟持部3aにて簡単且つ確実にチューブ8を包み込んで固定支持できる。
【0033】
図1,図2に示す第1の支持部2には、取り付け部3から一方向(略X1方向)に略一定厚で延出する設置部2aを備える。設置部2aには磁気センサ5を設置可能な広さのスペースがあり、例えば磁気センサ5は設置部2a上に接着層を介して予め固定支持されている。すなわち磁気センサ5は、購入段階で既に設置部2aに取り付けられており、看護士等がわざわざ設置部2a上に磁気センサ5をセットする必要はない。図4(a)は、第1の支持部2に予め固定支持された状態の磁気センサ5を示す部分拡大縦断面図であり、磁気センサ5の上面及び側面が保護層(被覆層)9により覆われた状態とされている。保護層9には保護フィルム等を選択できるが、保護層9が無くてもよい。あるいは、図4(b)の部分拡大斜視図に示すように、第1の支持部2の設置部2aには、正面に開口10aを備える収納部10が設けられており、収納部10に磁気センサ5を挿入する形態とすることも可能である。図4(b)に示すように磁気センサ5には配線部(ケーブル)5aが接続されており、配線部5aは例えば図8に示す検知器11に電気的に接続されている。検知器11では、磁気センサ5の検知信号を電気的に処理して針抜け状態であるか否かを検知し、針抜け状態と判断したらブザーを鳴らしたりランプを点灯させたりできる。
【0034】
磁気センサ5を収納するための収納部10をコネクタ部とすることも可能である。すなわち磁気センサ5をコネクタ部に挿入して磁気センサ5と検知器11とが電気的に接続される形態とすることもできる。
【0035】
図4(b)の構成では、針抜け検知装置1を患者にセットする際、磁気センサ5を図4(b)に示す収納部(コネクタ部)10に挿入することが必要である。このとき、磁気センサ5が挿入されていなければ、磁気センサ5と検知部11とが電気的に非接続の状態にあり、あるいは磁気センサ5が磁石6の外部磁界を検知できない状態にある。したがって、磁気センサ5と検知部11との接続状態や磁気センサ5から出力された信号を基に例えばアラームが鳴るようにしておくことで、磁気センサ5の挿入し忘れを防止できる。
【0036】
図2に示すように、第1の支持部2の底面2bは、人間の腕の形状に概ね倣うようにやや湾曲した形状である。
【0037】
図1,図2に示す第2の支持部4は、例えば樹脂シートであり、第2の支持部4の裏面には粘着層13が設けられている。第2の支持部4を第1の支持部2と同じ材質としてもよいし、異なる材質とすることもできる。図2には図示されていないが、粘着層13の裏面には剥離紙が設けられており、剥離紙を剥がして患者の腕に第2の支持部4を貼り付ける。
【0038】
図2に示すように、第2の支持部4の上面には外部磁界発生部としての磁石6が固定支持されている。第2の支持部4は磁石6を支持できる程度の大きさを備える。
【0039】
例えば図5(a)の拡大斜視図に示すように、磁石6は第2の支持部4上に接着層を介して予め固定支持されている。すなわち看護士等がわざわざ第2の支持部4上に磁石6を設置する必要はない。あるいは、図5(b)の拡大斜視図に示すように、第2の支持部4の上面には正面に開口15aを備える収納部15が設けられており、収納部15に磁石6を挿入する形態とすることも可能である。
【0040】
図5(b)の構成では、針抜け検知装置1を患者にセットする際、磁石6を図5(b)に示す収納部15に挿入することが必要である。磁石6を収納部15に挿入しないと、磁気センサ5が磁石6の外部磁界を検知できない状態にあるため、磁気センサ5は針抜け状態の信号を出し続ける。したがって磁気センサ5から出力された信号を基にアラームを鳴らすなどして磁石6がセットされていないことを知らせることができる。
【0041】
図1,図2に示すように本実施形態の針抜け検知装置1では、第1の構成部Aと第2の構成部Bとの間を保持する保持シート(保持部)20を備える。本実施形態では、第1の構成部Aに設けられた磁気センサ5と第2の構成部Bに設けられた磁石6との間の距離L1を一定に保つように第1の構成部Aと第2の構成部Bとを剥離可能な保持シート20で保持する点に特徴的部分がある。
【0042】
ここでいう一定の距離L1とは、磁気センサ5の中心O1と、磁石6の中心O2との間の直線的な距離を指す。
【0043】
図2に示すように保持シート(保持板)20は、例えば樹脂シート21の裏面に粘着層22を備えた構成である。なお保持シート20の粘着力は、第2の支持部4の裏面に設けられた粘着層13の粘着力より弱い。
【0044】
保持シート20を構成する樹脂シート21はある程度の剛性があったほうがよい。すなわち樹脂シート21が柔軟性に優れた材質の場合、保持シート20の部分が撓んだ状態で、第1の構成部Aを医療器具に、第2の構成部Bを人体に取り付けてしまうことがある。この場合、磁石6と磁気センサ5との間の距離がL1から変わってしまうため(L1より小さくなる)、保持シート20に剛性を持たせることで、針抜け検知装置1を患者にセットする際、磁石6と磁気センサ5との間の距離を適切L1に保つことができる。
【0045】
図6ないし図8の斜視図を用いて本実施形態における針抜け検知装置1の人体への設置方法及び針抜けの検知状態を説明する。
【0046】
図6に示すように、チューブ8の先端に医療用針26を備えた医療器具27を二本用意し、各医療用針26を患者の腕25の血管に穿刺する。そして、各医療用針26及びチューブ8を夫々、粘着性テープ35,35で腕25に止める。医療用針26の一方は動脈用、他方が静脈用であり、静脈用に本実施形態の針抜け検知装置1がセットされる。
【0047】
本実施形態の針抜け検知装置1は、図1,図2で示すように、第1の構成部Aと第2の構成部Bとが保持シート20で保持されており、磁気センサ5と磁石6との間の距離L1が一定に保たれている。図6に示すように、保持シート20にて保持された第1の構成部Aを、一方の医療器具27を構成するチューブ8の医療用針26に近い位置に取り付ける。取り付け方は既に図3で説明した通りである。すなわち例えば第1の構成部Aに設けられた取り付け部3はクリップ構造であり、チューブ8の上方からチューブ8を取り付け部3の挟持部3aにて挟み込むことで簡単に第1の構成部Aをチューブ8に取り付けることができる。
【0048】
一方、第2の構成部Bでは、粘着層13の裏面に設けられた剥離紙を剥がした後、粘着層13を介して第2の構成部Bを患者の腕25に貼り付ける。このとき、第1の構成部Aと第2の構成部Bとの間を保持する保持シート20により磁気センサ5と磁石6との間の距離L1は一定に保たれている。
【0049】
続いて保持シート20を剥がす。剥がした状態が図7である。図7の状態が患者に対して針抜け検知装置1がセットされた状態である。図7に示すように保持シート20を剥がすことで、第1の構成部Aと第2の構成部Bとが分離された状態となる。
【0050】
磁気センサ5に接続される配線部(ケーブル)5aは図8に示すように検知器11に接続される。
【0051】
そして図8に示すように、医療用針26が患者の腕25から抜けると第1の構成部Aの位置が図7の基準状態(初期状態)から変動し、磁気センサ5と磁石6との間の距離が変化する。これにより針抜けを検知し、検知器11では針抜け検知の際、ブザーが鳴ったり、ランプが点灯したりするようにして針抜けを早く医療従事者や患者等に知らせることができる。
【0052】
本実施形態では、第1の構成部Aと第2の構成部Bとを剥離可能な保持シート20で保持しており、これにより本実施形態の針抜け検知装置1を、磁気センサ5と磁石6との間の距離L1を一定に保った状態で患者にセットすることができる。また針抜け検知装置1のセットの煩わしさを抑制できる。すなわち保持シート20にて第1の構成部Aと第2の構成部Bとが保持された状態であるため、磁気センサ5と磁石6との間の距離L1を一定に保ちながら、第1の構成部Aの医療器具への取り付けと、第2の構成部Bの人体への貼着とを簡単且つスピーディに行うことが出来る。
【0053】
続いて磁気センサ5の内部構造及び動作原理について説明する。図9(a)(b)は、図7(基準状態)の磁石と磁気センサとの位置関係を示し、図9(a)は、縦断面図を示し、図9(b)は平面図を示す。
【0054】
図9(a)に示すように磁気センサ5には、GMR素子30が内蔵されている。GMR素子30は、固定磁性層31、非磁性材料層32及びフリー磁性層33の積層構造を備える。図示しないが固定磁性層31の下面側にはIrMnやPtMnよりなる反強磁性層が設けられ、NiFeやCoFe等の軟磁性層からなる固定磁性層31との間で交換結合磁界(Hex)が生じる構成であることが好ましい。固定磁性層31の磁化方向Pは一方向に固定される。この実施形態では固定磁性層31の磁化方向はX2方向に固定されている。非磁性材料層32はCu等で形成される。フリー磁性層33はNiFe等の軟磁性材料で形成される。フリー磁性層33には図示しないバイアス層からのバイアス磁界が供給されて、フリー磁性層33の磁化は一方向に揃えられる。例えばフリー磁性層33の磁化は固定磁性層31の磁化方向に対して直交方向である。またフリー磁性層33の上面には図示しないTa等の保護層が形成される。
【0055】
図9(b)に示すY1−Y2方向は、例えば図7に示すように腕25の延出方向であり、X1−X2方向はY1−Y2方向に直交する幅方向である。
【0056】
さて図9(a)(b)は磁気センサ5と磁石6とのX1−X2方向への距離L1が一定に保たれた基準状態(初期状態)である。磁石6の構成を特に規定するものでないが、基準状態において、磁気センサ5には磁石6から略平面方向(X方向とY方向とで構成される平面)への外部磁界Hが作用するようにされている。
【0057】
図9(a)(b)に示すように磁石6から磁気センサ5にはX2方向に外部磁界Hが作用している。この外部磁界Hを受けてフリー磁性層33の磁化方向FはX2方向に向けられる。したがって、固定磁性層31の磁化方向Pとフリー磁性層33の磁化方向Fとが同一方向となるため、磁化方向P,Fが互いに直交した状態よりも電気抵抗値が小さくなった状態となっている。なお、固定磁性層31の磁化方向PがX1方向であれば、固定磁性層31とフリー磁性層33との磁化関係は反平行になるから電気抵抗値は大きくなる。
【0058】
また図9(a)(b)に示す配置はあくまでも一例であり、例えば磁石6及び磁気センサ5を図9(a)(b)の状態から90度回転させた配置とすることもできる。
【0059】
図9(c)は、図8のように医療用針26が腕25から抜けたときの磁石6と磁気センサ5(GMR素子30)との位置関係を示す平面図である。医療用針26が患者の腕25から抜けて医療器具27がY2方向に移動すると、医療器具27のチューブ8に取り付けられた第1の構成部Aも医療器具27とともにY2方向に移動する(図8参照)。したがって第1の構成部Aに支持された磁気センサ5(GMR素子30)は、図9(a)(b)の基準状態(初期状態)からY2方向に移動する。この結果、磁気センサ5と磁石6との間の距離が変動し、具体的には磁気センサ5は磁石6から遠ざかる。このため、磁石6からの外部磁界Hが磁気センサ5に作用せず、あるいは作用する外部磁界Hの大きさが基準状態のときよりも小さくなるため、フリー磁性層33の磁化方向Fは、フリー磁性層33に作用しているGMR素子30内でのバイアス磁界によって固定磁性層31の磁化方向Pに対して略直交方向に向く(図9(c))。この結果、GMR素子30の電気抵抗値は図9(b)の基準状態から大きくなる。なお固定磁性層31の磁化方向PがX1方向にある形態では、図9(b)の基準状態から図9(c)の針抜け状態に移行すると磁気センサ5の電気抵抗値は小さくなる。
【0060】
図10は磁気センサ5の動作の一例を示す。横軸が外部磁界の大きさを示し縦軸が磁気センサ5の出力である。外部磁界Hがゼロの状態、すなわち外部磁界Hが磁気センサ5に作用していない状態では、磁気センサ5の出力がHiとなっている。外部磁界Hが徐々に+Hに向けて大きくなり、外部磁界HがHonの大きさになると出力はLowとなり、ON信号が出力される。その状態から徐々に外部磁界Hが小さくなり、外部磁界HがHoffの大きさとなると出力はHiとなり、OFF信号が出力される。
【0061】
図10の動作特性を有する磁気センサ5では、磁石6との距離が一定に保たれた基準状態(初期状態)では、出力がLowレベルにあり、ON信号が出力される状態にあるが、磁石6との距離が離れて出力がHiレベルになるとOFF信号が出力される。磁気センサ5のON信号、OFF信号の生成を検知器11で行うことができ、検知器11では、ON信号が出力された場合は針抜け状態に無いと判断し、OFF信号が出力された場合は、針抜け状態と判断する。
【0062】
図11(a)は、医療用針のX1−X2方向への移動位置と、磁気センサ5の出力との関係を示すグラフの一例である。なお医療用針の位置あるいはかなり近い位置に磁気センサ5が取り付けられており、図11(a)(b)の横軸の医療用針の移動距離はすなわち、磁気センサ5の移動距離と置き換ええることができる。
【0063】
磁気センサ5の内部には複数のGMR素子が配置されており、例えば、X1−X2方向検知用の各GMR素子の出力の和が図11(a)における縦軸とされている。医療用針の位置がゼロのとき医療用針の抜けはない。一方、医療用針が略抜け方向に動くと、それに伴って磁気センサ5も動く。例えば、医療用針がX1方向あるいはX2方向に移動することで磁気センサ5からは、図11(a)に示す出力変動を得ることができる。このとき検知器11では、第1のスレッショルドレベル(第1の閾値)SL1を備えており、出力が第1のスレッショルドレベル(第1の閾値)SL1を下回ったら針抜けと判断する。
【0064】
また、図11(b)は、医療用針のY1−Y2方向への移動位置と、磁気センサ5の出力との関係を示すグラフである。磁気センサ5の内部には複数のGMR素子が配置されており、例えば、Y1−Y2方向検知用の各GMR素子の出力の差が縦軸とされている。医療用針の位置がゼロのとき医療用針の抜けはない。一方、医療用針がY1−Y2方向に動くと、それに伴って磁気センサ5を備える第1の構成部AもY1−Y2方向に動く。例えば、医療用針が針抜け方向であるY2方向に移動することで、磁気センサ5からは、図11(a)に示す出力変動を得ることができる。このとき検知器11では、第2のスレッショルドレベル(第2の閾値)SL2を備えており、出力が第2のスレッショルドレベル(第2の閾値)SL2を下回ったら針抜けと判断する。スレッショルドレベルは複数のレベルにあり、全てのスレッショルドレベルを下回りあるいは上回ったらON、OFFする形態にすることでノイズを小さくできる。
【0065】
どの出力レベルにスレッショルドレベルを置くかによって、検知感度を変えることができる。例えば、医療用針26が人体から完全に抜けていなくても抜けそうな状態を判断できる。また図11(a)(b)に示す2軸出力の組み合わせで針抜け状態の確実な判断を行うことができる。磁気センサ5を医療用針26に近い位置に取り付けることができ、これにより医療用針26の動きを適切に判断でき、針が抜けそうな状態を正確に判断して針抜けに伴う出血を事前に食い止めやすい。ただし医療用針26の発生する磁場の影響を磁気センサが受ける場合には、医療用針26の磁場計算を行い、磁気センサ5の感度調整を行うことが必要である。
【0066】
本実施形態では図6の状態から保持シート20を剥がして第1の構成部Aと第2の構成部Bとを分離するが、保持シート20の剥がし忘れを防止すべく、例えば導電性の保持シート20として第1の構成部Aと第2の構成部B間を保持シート20を介して導通状態にしておく。ただし、この導通により磁気センサ5に悪影響を及ぼす等するときは、磁気センサ5を絶縁層で保護する等して、導通の影響を受けないようにする。また導通状態を図8の検知器11にて検知できるようにしておき(なお導通状態を検知するための配線部は図示していない)、導通状態のままだとアラームが鳴るなど保持シート20を剥がしていないことを知らせるようにしておく。そして保持シート20を剥がして第1の構成部Aと第2の構成部B間を非導通状態にして初めてアラームが消えるようにセットしておくことで、保持シート20の剥がし忘れを防止できる。
【0067】
あるいは、図4(b)や図5(b)に示すように、磁気センサ5や磁石6を収納する収納部(コネクタ部)がある構成では、保持シート20の一部が収納部の開口位置にかかるようにしておく。磁気センサ5や磁石6を収納部内に設置しないとアラームが鳴り続けるようにしておくことで、磁気センサ5や磁石6の収納のし忘れを防止できるとともに、保持シート20を剥がさないと磁気センサ5や磁石6の収納できないため、保持シート20の剥がし忘れも防止できる。
【0068】
図12(a)は、第1の実施形態の針抜け検知装置1に検知器40を手首近辺に取り付けることができるようにした斜視図である。例えば検知器40を備えたベルト41を手首に巻くことで検知器40を備えた小型の針抜け検知装置1を実現できる。また図12(b)では、第1の構成部Aを横向きとした構成である。図12(b)では、横から第1の構成部Aの取り付け部3を医療器具に取り付ける。
【0069】
図13は、第2の実施形態における針抜け検知装置を示し、図13(a)は平面図、図13(b)は正面図、図13(c)は、図13(b)の針抜け検知装置を患者に装着した状態を示す正面図、図13(d)は、切り取り線から第1の支持部と第2の支持部とを分離した状態を示す正面図である。
【0070】
図13に示す針抜け検知装置50では、一枚の支持体(支持シート)51のX1−X2方向の中間にY1−Y2方向に直線状に延びるミシン目(脆弱接続部)52,53が複数並設されている。ミシン目52,53の位置及び各ミシン目52,53間の領域を含めて本実施形態の保持部58を構成する。図13(a)に示すように、保持部58にはY1方向にとび出した摘み部56が設けられる。図13(a)に示すように、ミシン目52を境界としてX2側に第1の構成部Aが位置し、ミシン目53を境界としてX1側に第2の構成部Bが位置する。そして本実施形態では、各構成部A,B及び保持部58が一体形成されている。
【0071】
図13(a)(b)に示すように第1の構成部Aの支持体51の上面側に磁気センサ54が設置されており、第1の構成部Aの下面側に医療器具を取り付けるための取り付け部55が設けられている。図13(a)(b)に示すように第2の構成部Bの支持体51の下面側に磁石57が支持されている。なお磁石57は支持体51の上面側に設置されてもよい。
【0072】
第2の構成部Bでは、支持体51の裏面に粘着層59が設けられている。図示しないが粘着層59の裏面には剥離層が設けられ、人体に第2の構成部Bを貼り付ける際に前記剥離層を剥がす。
【0073】
図13(a)に示す磁気センサ54と磁石57のX1−X2方向の距離L1は一定に保たれている。
【0074】
図13(c)に示すように、チューブ8の先端に医療用針26を備えた医療器具27(図6等参照)の前記医療用針26に近いチューブ8の部分を取り付け部55に取り付け、さらに磁石57を備える第2の構成部Bを患者の腕25に貼着する。上記したように、支持体51の裏面には第2の構成部Bの位置に粘着層59があり、また粘着層59の裏面には図示しない剥離紙が設けられている。針抜け検知装置50をセットする際には、前記剥離紙を剥がし、粘着層59を介して第2の構成部Bを腕25に貼り付けることができる。
【0075】
そして図13(a)に示す摘み部56を指で摘んでミシン目52,53に沿ってミシン目52、53の間の保持部58を切り取る。これにより図13(d)に示すように第1の構成部Aと第2の構成部Bとを分離できる。
【0076】
ミシン目は一本だけでもよい。かかる場合、ミシン目(脆弱接続部)の位置が本実施形態における「保持部」に該当する。ただし、図13(a)に示すようにミシン目52,53を二本並設し、さらにミシン目52,53の間から摘み部56を外方に突出させることで、簡単に第1の構成部Aと第2の構成部Bとの間を分離しやすい。
【0077】
図13に示す実施形態においても、磁気センサ54と磁石57との間の距離を一定に保った状態で人体に針抜け検知装置をセットすることができる。
【0078】
図14(a)は、図13(d)の患者に針抜け検知装置をセットした状態(針抜けなし)の平面図を示し、図14(b)は、医療用針が抜けて磁石と磁気センサとの距離が変化した状態を示す平面図である。
【0079】
図14(a)では、磁気センサ54に磁石57からの外部磁界が届いており(届いている範囲を点線で示す)、針抜けがないと判断する。一方、図14(b)のように針が抜けて磁気センサ54がY2方向にL2移動して、磁石57からの外部磁界が磁気センサ54に届かなくなると、針抜け状態と判断する。
【0080】
図13,図14に示す磁気センサ54も、図10,図11に示す出力動作を示し、針の抜けそうな状態も高精度に検知することができる。
【0081】
また図13(a)と異なって、図15のように、略90度に折れ曲がる支持体(支持シート)60を用いることもできる。図15では、ミシン目61(脆弱接続部)がX1−X2方向に沿って設けられている。ミシン目61を境界として一体に保持された第1の構成部Aの磁気センサ54と第2の構成部Bの磁石57とはX1−X2方向及びY1−Y2方向の各方向に対して斜めに傾いた方向で対向している。
【0082】
支持体(支持シート)60の形状は図13、図15に限定されるものでなくV字状やT字状等、限定されるものでない。
【0083】
図13(b)では、磁気センサ54と医療器具の取り付け部55とを高さ方向に重ねているが、図2等で示すように取り付け部3の横に磁気センサ5を配置するほうが、磁石6と磁気センサ5とを略平面配置でき、特に磁気センサ5にGMR素子30を用いた場合には有利である。
【0084】
また磁気センサ54にはGMR素子30を用いることもできるしホール素子等を用いることもできる。ただしGMR素子30を用いることで高精度な検知を行うことができ、例えば針の抜けそうな医療器具の動きとしては小さい状態でも適切に判断できる。
【0085】
医療器具の取り付け部の構成を限定するものでないが、医療器具の少なくとも周囲の一部を挟んで固定する構成であることが、医療器具を適切且つ簡単に第1の構成部Aに取り付けることができ好ましい。
【0086】
特に図2に示すように取り付け部3をクリップ構造にして、上から医療器具を挟み込むことで簡単に医療器具を取り付けることができる。
【0087】
本実施形態では第1の構成部Aに磁気センサを設置し、第2の構成部Bに磁石を設置したが逆であってもよい。
また外部磁界を生じる外部磁界発生部であれば磁石に限定されない。
【0088】
また、磁気センサ及び磁石は各構成部A,Bに夫々、予め固定支持された状態であることが望ましい。これにより、針抜け検知装置を設置する者がわざわざ磁石や磁気センサを各構成部A,Bに取り付ける必要性がなくなり、針抜け検知装置のセットが簡単になり好適である。
【0089】
なお本実施形態における「保持部」は、磁石(磁界発生部)と磁気センサとの間の距離を一定に保つものであるが、図4(b)や図5(b)のように磁石や磁気センサを収納部(コネクタ部)に後から収納する構成では、「保持部」が、各収納部間、あるいは、磁石と磁気センサを収納するための収納部(コネクタ部)間、または、磁気センサと磁石を収納するための収納部間の距離を一定に保っている。しかしながら結局、針抜け検知装置を患者にセットした最終形態では、磁石(磁界発生部)と磁気センサとの間の距離が一定に保たれることになるから、本実施形態では、後から収納部に磁石や磁気センサを収納する形態であっても、保持部は、磁石(磁界発生部)と磁気センサとの間の距離を一定に保つものとして定義される。
【符号の説明】
【0090】
A 第1の構成部
B 第2の構成部
F フリー磁性層の磁化方向
H 外部磁界
L1 磁気センサと磁石との間の距離
P 固定磁性層の磁化方向
1、50 針抜け検知装置
2 第1の支持部
3、55 取り付け部
3a 挟持部
3b 把持部
4 第2の支持部
5、54 磁気センサ
6、57 磁石
8 チューブ
10 収納部(コネクタ部)
11、40 検知部
13、59 粘着層
15 収納部
20 保持シート
25 腕
26 医療用針
27 医療器具
30 GMR素子
31 固定磁性層
33 フリー磁性層
51、60 支持体(支持シート)
52、53、61 ミシン目
58 保持部
【特許請求の範囲】
【請求項1】
磁気センサあるいは磁界発生部の一方を第1の支持部にて支持し、さらに医療用針を備えた医療器具を取り付けるための取り付け部を備える第1の構成部と、
前記磁気センサあるいは前記磁界発生部の他方を第2の支持部にて支持してなる第2の構成部と、
前記磁気センサと前記磁界発生部との間の距離を一定に保つように前記第1の構成部と前記第2の構成部とを保持し、前記第1の構成部を前記医療器具に取り付け、前記第2の構成部を人体に取り付けた後、前記第1の構成部と前記第2の構成部との間を分離することが可能な保持部と、
を有することを特徴とする針抜け検知装置。
【請求項2】
前記保持部は、前記第1の構成部と前記第2の構成部との双方に貼着して前記磁気センサと前記磁界発生部との間の距離を一定に保ち、前記第1の構成部を前記医療器具に取り付け、前記第2の支持部を人体に取り付けた後、剥離可能な粘着層を備える保持シートである請求項1記載の針抜け検知装置。
【請求項3】
前記保持部は、前記第1の支持部と前記第2の支持部との間に位置して前記第1の支持部と前記第2の支持部とを一体の支持体として保持し、前記第1の構成部を前記医療器具に取り付け、前記第2の支持部を人体に取り付けた後、前記第1の支持部と前記第2の支持部との間を切り離すことが可能な脆弱接続部である請求項1記載の針抜け検知装置。
【請求項4】
前記脆弱接続部はミシン目である請求項3記載の針抜け検知装置。
【請求項5】
前記取り付け部は、前記医療器具の少なくも周囲の一部を挟んで固定する構成である請求項1ないし4のいずれか1項に記載の針抜け検知装置。
【請求項6】
前記取り付け部は、前記医療器具上から前記医療器具を挟み込むことが可能な構造である請求項5記載の針抜け検知装置。
【請求項7】
前記取り付け部は、前記医療器具を挟み込む挟持部と、指で把持可能な把持部とを備えたクリップ構造である請求項6記載の針抜け検知装置。
【請求項8】
前記第1の構成部では、前記取り付け部の横に前記磁界発生部あるいは前記磁気センサが設置される請求項1ないし7のいずれか1項に記載の針抜け検知装置。
【請求項9】
前記第1の構成部では、前記取り付け部と前記磁界発生部あるいは前記磁気センサとが高さ方向に重ねて設けられる請求項1ないし7のいずれか1項に記載の針抜け検知装置。
【請求項10】
前記磁界発生部及び前記磁気センサは、各支持部に予め固定支持されている請求項1ないし9のいずれか1項に記載の針抜け検知装置。
【請求項11】
前記第1の支持部あるいは前記第2の支持部の少なくとも一方には、前記磁界発生部あるいは前記磁気センサの少なくとも一方を収納するための収納部が設けられている請求項1ないし10のいずれか1項に記載の針抜け検知装置。
【請求項12】
前記第1の支持部あるいは前記第2の支持部の少なくとも一方には、前記磁界発生部あるいは前記磁気センサの少なくとも一方を収納するための収納部が設けられており、
前記保持シートにより、前記収納部の開口の少なくとも一部が塞がれており、前記保持シートを剥離することで前記収納部に前記磁界発生部あるいは前記磁気センサが収納可能とされる請求項11記載の針抜け検知装置。
【請求項13】
前記収納部は、前記磁気センサを収納するためのコネクタ部である請求項11又は12に記載の針抜け検知装置。
【請求項14】
前記人体に取り付けることが可能な、前記磁気センサからの検知信号を処理するための検知器を備える請求項1ないし13のいずれか1項に記載の針抜け検知装置。
【請求項15】
前記磁気センサはGMR素子を備える請求項1ないし14のいずれか1項に記載の針抜け検知装置。
【請求項1】
磁気センサあるいは磁界発生部の一方を第1の支持部にて支持し、さらに医療用針を備えた医療器具を取り付けるための取り付け部を備える第1の構成部と、
前記磁気センサあるいは前記磁界発生部の他方を第2の支持部にて支持してなる第2の構成部と、
前記磁気センサと前記磁界発生部との間の距離を一定に保つように前記第1の構成部と前記第2の構成部とを保持し、前記第1の構成部を前記医療器具に取り付け、前記第2の構成部を人体に取り付けた後、前記第1の構成部と前記第2の構成部との間を分離することが可能な保持部と、
を有することを特徴とする針抜け検知装置。
【請求項2】
前記保持部は、前記第1の構成部と前記第2の構成部との双方に貼着して前記磁気センサと前記磁界発生部との間の距離を一定に保ち、前記第1の構成部を前記医療器具に取り付け、前記第2の支持部を人体に取り付けた後、剥離可能な粘着層を備える保持シートである請求項1記載の針抜け検知装置。
【請求項3】
前記保持部は、前記第1の支持部と前記第2の支持部との間に位置して前記第1の支持部と前記第2の支持部とを一体の支持体として保持し、前記第1の構成部を前記医療器具に取り付け、前記第2の支持部を人体に取り付けた後、前記第1の支持部と前記第2の支持部との間を切り離すことが可能な脆弱接続部である請求項1記載の針抜け検知装置。
【請求項4】
前記脆弱接続部はミシン目である請求項3記載の針抜け検知装置。
【請求項5】
前記取り付け部は、前記医療器具の少なくも周囲の一部を挟んで固定する構成である請求項1ないし4のいずれか1項に記載の針抜け検知装置。
【請求項6】
前記取り付け部は、前記医療器具上から前記医療器具を挟み込むことが可能な構造である請求項5記載の針抜け検知装置。
【請求項7】
前記取り付け部は、前記医療器具を挟み込む挟持部と、指で把持可能な把持部とを備えたクリップ構造である請求項6記載の針抜け検知装置。
【請求項8】
前記第1の構成部では、前記取り付け部の横に前記磁界発生部あるいは前記磁気センサが設置される請求項1ないし7のいずれか1項に記載の針抜け検知装置。
【請求項9】
前記第1の構成部では、前記取り付け部と前記磁界発生部あるいは前記磁気センサとが高さ方向に重ねて設けられる請求項1ないし7のいずれか1項に記載の針抜け検知装置。
【請求項10】
前記磁界発生部及び前記磁気センサは、各支持部に予め固定支持されている請求項1ないし9のいずれか1項に記載の針抜け検知装置。
【請求項11】
前記第1の支持部あるいは前記第2の支持部の少なくとも一方には、前記磁界発生部あるいは前記磁気センサの少なくとも一方を収納するための収納部が設けられている請求項1ないし10のいずれか1項に記載の針抜け検知装置。
【請求項12】
前記第1の支持部あるいは前記第2の支持部の少なくとも一方には、前記磁界発生部あるいは前記磁気センサの少なくとも一方を収納するための収納部が設けられており、
前記保持シートにより、前記収納部の開口の少なくとも一部が塞がれており、前記保持シートを剥離することで前記収納部に前記磁界発生部あるいは前記磁気センサが収納可能とされる請求項11記載の針抜け検知装置。
【請求項13】
前記収納部は、前記磁気センサを収納するためのコネクタ部である請求項11又は12に記載の針抜け検知装置。
【請求項14】
前記人体に取り付けることが可能な、前記磁気センサからの検知信号を処理するための検知器を備える請求項1ないし13のいずれか1項に記載の針抜け検知装置。
【請求項15】
前記磁気センサはGMR素子を備える請求項1ないし14のいずれか1項に記載の針抜け検知装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−85635(P2013−85635A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−227595(P2011−227595)
【出願日】平成23年10月17日(2011.10.17)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月17日(2011.10.17)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]