
鉄棒ロボット
【課題】 鉄棒で大車輪をするロボットの回転を継続させるため、慣性モーメントの強弱出来ることを可能にして、簡単な構造で、大車輪の継続が出来るようにする。
【解決手段】 ロボットの動作の電源は、ロボットに電池を内蔵し、受信機とサーボモータもロボット内に内蔵して、制御信号には、外部の送信機からの無線を使います。
大車輪で上昇時、回転半径を小さくする為、サーボモータで、ロボットの腕と脚を同時に屈曲させるて、慣性モーメントを小さくし、大車輪の継続を可能にする。
【解決手段】 ロボットの動作の電源は、ロボットに電池を内蔵し、受信機とサーボモータもロボット内に内蔵して、制御信号には、外部の送信機からの無線を使います。
大車輪で上昇時、回転半径を小さくする為、サーボモータで、ロボットの腕と脚を同時に屈曲させるて、慣性モーメントを小さくし、大車輪の継続を可能にする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、鉄棒ロボットが大車輪を継続する回転原理として、慣性モーメントの強弱を利用する。
【0002】
本発明は、鉄棒をするロボットの制御信号に、無線を使用する。
【背景技術】
【0003】
従来の、鉄棒をするロボットは、構造が複雑であり、構造が簡単なものは、動作がリアルでない。
【特許文献1】特開2000−262767(P2000−262767A)
【発明の開示】
【発明が解決しようとする課題】
【0004】
鉄棒ロボットの回転原理を簡単な方法で行い、構造を簡単にする。
【0005】
コントローラーから、鉄棒ロボット迄の制御信号を、無線化する。
【課題を解決するための手段】
【0006】
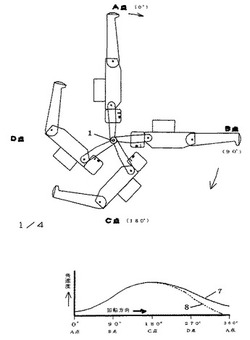
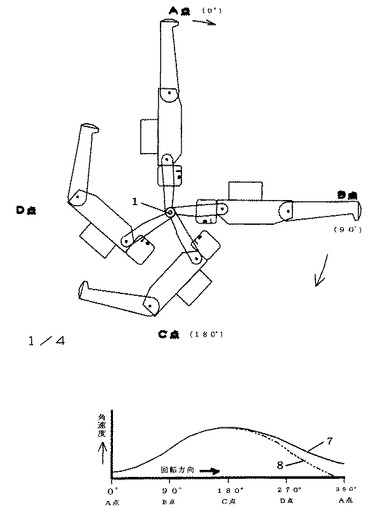
鉄棒ロボットを回転させる方法として、ロボットが大車輪上昇時に、送信機のスティックを操作することにより、ロボット内の受信機からの信号で、サーボモータが、送信機のスティックの操作角度に比例して右回転し、リンケージロッドを引きロボットの腕と脚を同時に屈曲させ、大車輪時の回転半径(r)を小さくして(図3参照)、慣性モーメントを小さくすることにより、加速又は、減速が少なくなり(図2参照)、A点に達した時、ロボットを伸直状態にすると大車輪を継続する。
【0007】
コントローラーにラジコンの送信機を使用し、鉄棒ロボット内には受信機1台と、サーボモーター1台及び、電源用電池を1組を置き、その他、電源スイッチと若干のリンケージ用アームと、ロッドを取り付ける(図1参照)。
【0008】
慣性モーメント(I)≒r2×m
r 重心までの回転半径
m ロボット本体の質量
【0009】
(図2参照)点線8は、ロボットが大車輪上昇時、C点からD点を通りA点までを伸直状態のまま上昇した場合、空気抵抗や、鉄棒との摩擦でA点まで到達でき出来ずに回転が停止する。
【0010】
(図2参照)実線7は、ロボットが大車輪上昇時、C点からD点を通りA点までを屈曲した状態で通過した時、慣性モーメントが小さくなり、あまり減速しないでA点まで到達するので、回転を継続する。
【発明の効果】
【0011】
この鉄棒ロボットを操作するには、ラジコン送信機のスティック操作にて可能であり、回転スピードや姿勢等も、コントロール出来る。
【0012】
操作に熟練してくると、ロボットの動作原理が、実際の人の大車輪と似ているので、リアルな回転をする。
【発明を実施するための最良の形態】
【0013】
製作コストを少なくするには、既存のラジコン用送信機と受信機及びサーボを使用する。
【0014】
ロボットの大きさがあまり小さいと、動きが速くなって操作が難しくなるので、大きさは、全長が約30cmから、50cm位あれば良い。
【0015】
ラジコンサーボモータは、あまり非力でなく、
トルクは、 約 8Kg/cm 以上
スピードは、 約 0.15sec/60°以上 が必要。
【産業上の利用可能性】
【0016】
構造が比較的にシンプルであるため、量産可能です。
【図面の簡単な説明】
【0017】
【図1】Aはロボットが伸直した状態を表し、Bはロボットが一番深く屈曲した状態である。Cはラジコン送信機である。
【図2】大車輪の状態と、各回転位置に於ける角速度の変化を表します。
【図3】ラジコンサーボで、ロボットの腕と脚を同時に屈曲させる為の、リンケージの状態を表示している。
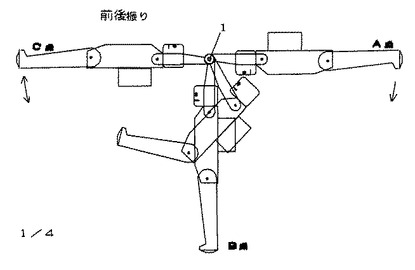
【図4】前後振の状態を表示してあり、A点で伸直状態で降下し、すぐに屈曲状態に入り、C点に達し、再び伸直状態で降下してB点を通りA点に戻る。以上を繰り返します。
【符号の説明】
【0018】
1 鉄棒
2 電池ケース
3 受信機(ラジコン用)
4 サーボモータ(ラジコン用)
5 サーボ回転軸
6 重心位置
7 C点からD点を通りA点までを、ロボットが屈曲した状態時の角速度の カーブ
8 C点からD点を通りA点までを、ロボットが伸直状態のままであった時 の角速度のカーブ。A点まで到達しない。
9 腕の回転軸
10 脚の回転軸
11 サーボモータの回転を腕と脚に伝えるためのリンクロッド
12 サーボモータの回転軸
13 屈曲時に、重心移動を多くする為の重り(鉛)
14 無線送信機
15 操作用スティック
16 アンテナ
17 電源スイッチ
18 此のスチィックを上下に操作してロボットをコントロールする。
【技術分野】
【0001】
本発明は、鉄棒ロボットが大車輪を継続する回転原理として、慣性モーメントの強弱を利用する。
【0002】
本発明は、鉄棒をするロボットの制御信号に、無線を使用する。
【背景技術】
【0003】
従来の、鉄棒をするロボットは、構造が複雑であり、構造が簡単なものは、動作がリアルでない。
【特許文献1】特開2000−262767(P2000−262767A)
【発明の開示】
【発明が解決しようとする課題】
【0004】
鉄棒ロボットの回転原理を簡単な方法で行い、構造を簡単にする。
【0005】
コントローラーから、鉄棒ロボット迄の制御信号を、無線化する。
【課題を解決するための手段】
【0006】
鉄棒ロボットを回転させる方法として、ロボットが大車輪上昇時に、送信機のスティックを操作することにより、ロボット内の受信機からの信号で、サーボモータが、送信機のスティックの操作角度に比例して右回転し、リンケージロッドを引きロボットの腕と脚を同時に屈曲させ、大車輪時の回転半径(r)を小さくして(図3参照)、慣性モーメントを小さくすることにより、加速又は、減速が少なくなり(図2参照)、A点に達した時、ロボットを伸直状態にすると大車輪を継続する。
【0007】
コントローラーにラジコンの送信機を使用し、鉄棒ロボット内には受信機1台と、サーボモーター1台及び、電源用電池を1組を置き、その他、電源スイッチと若干のリンケージ用アームと、ロッドを取り付ける(図1参照)。
【0008】
慣性モーメント(I)≒r2×m
r 重心までの回転半径
m ロボット本体の質量
【0009】
(図2参照)点線8は、ロボットが大車輪上昇時、C点からD点を通りA点までを伸直状態のまま上昇した場合、空気抵抗や、鉄棒との摩擦でA点まで到達でき出来ずに回転が停止する。
【0010】
(図2参照)実線7は、ロボットが大車輪上昇時、C点からD点を通りA点までを屈曲した状態で通過した時、慣性モーメントが小さくなり、あまり減速しないでA点まで到達するので、回転を継続する。
【発明の効果】
【0011】
この鉄棒ロボットを操作するには、ラジコン送信機のスティック操作にて可能であり、回転スピードや姿勢等も、コントロール出来る。
【0012】
操作に熟練してくると、ロボットの動作原理が、実際の人の大車輪と似ているので、リアルな回転をする。
【発明を実施するための最良の形態】
【0013】
製作コストを少なくするには、既存のラジコン用送信機と受信機及びサーボを使用する。
【0014】
ロボットの大きさがあまり小さいと、動きが速くなって操作が難しくなるので、大きさは、全長が約30cmから、50cm位あれば良い。
【0015】
ラジコンサーボモータは、あまり非力でなく、
トルクは、 約 8Kg/cm 以上
スピードは、 約 0.15sec/60°以上 が必要。
【産業上の利用可能性】
【0016】
構造が比較的にシンプルであるため、量産可能です。
【図面の簡単な説明】
【0017】
【図1】Aはロボットが伸直した状態を表し、Bはロボットが一番深く屈曲した状態である。Cはラジコン送信機である。
【図2】大車輪の状態と、各回転位置に於ける角速度の変化を表します。
【図3】ラジコンサーボで、ロボットの腕と脚を同時に屈曲させる為の、リンケージの状態を表示している。
【図4】前後振の状態を表示してあり、A点で伸直状態で降下し、すぐに屈曲状態に入り、C点に達し、再び伸直状態で降下してB点を通りA点に戻る。以上を繰り返します。
【符号の説明】
【0018】
1 鉄棒
2 電池ケース
3 受信機(ラジコン用)
4 サーボモータ(ラジコン用)
5 サーボ回転軸
6 重心位置
7 C点からD点を通りA点までを、ロボットが屈曲した状態時の角速度の カーブ
8 C点からD点を通りA点までを、ロボットが伸直状態のままであった時 の角速度のカーブ。A点まで到達しない。
9 腕の回転軸
10 脚の回転軸
11 サーボモータの回転を腕と脚に伝えるためのリンクロッド
12 サーボモータの回転軸
13 屈曲時に、重心移動を多くする為の重り(鉛)
14 無線送信機
15 操作用スティック
16 アンテナ
17 電源スイッチ
18 此のスチィックを上下に操作してロボットをコントロールする。
【特許請求の範囲】
【請求項1】
鉄棒ロボットが大車輪をする回転力を得る為に、回転中のロボットの重心迄の回転半径を、ロボットの回転上昇時にタイミングを合わせて、縮め、慣性モーメントを小さくし角速度を下げないようにして、回転を継続させる。
【請求項2】
演技する鉄棒ロボットをコントロールする制御信号には無線を使用して送る。
【請求項1】
鉄棒ロボットが大車輪をする回転力を得る為に、回転中のロボットの重心迄の回転半径を、ロボットの回転上昇時にタイミングを合わせて、縮め、慣性モーメントを小さくし角速度を下げないようにして、回転を継続させる。
【請求項2】
演技する鉄棒ロボットをコントロールする制御信号には無線を使用して送る。
【図1】



【図2】
【図3】

【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−188399(P2008−188399A)
【公開日】平成20年8月21日(2008.8.21)
【国際特許分類】
【出願番号】特願2007−56325(P2007−56325)
【出願日】平成19年2月6日(2007.2.6)
【出願人】(507072450)
【Fターム(参考)】
【公開日】平成20年8月21日(2008.8.21)
【国際特許分類】
【出願日】平成19年2月6日(2007.2.6)
【出願人】(507072450)
【Fターム(参考)】
[ Back to top ]