
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
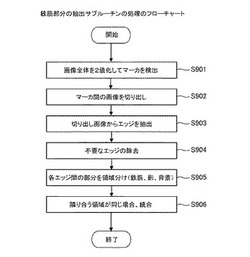
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、鉄筋、鉄筋の影、背景を含む撮影画像から鉄筋の領域を抽出する装置、方法及びプログラムに関する。
【背景技術】
【0002】
建築工事の現場においては、鉄筋コンクリート構造物の鉄筋を撮影し、その撮影した画像をコンピュータで処理すること(画像処理)により、鉄筋の本数、径及びピッチを計測する。そのとき、撮影対象となる鉄筋(対象鉄筋)は、通常、後方に位置する別の鉄筋や、様々な背景と重なるので、対象鉄筋の画像が不鮮明になり、画像処理の結果として計測される径長等の精度が悪くなる。そこで、画像処理による計測結果の精度を向上させるために、対象鉄筋だけを鮮明に撮影できるように、その後方に白いボードを設置することが必要になる。特許文献1には配筋情報取得装置及びその方法が開示されており、段落0033には白いボードの設置に関して記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−122008号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の配筋情報取得方法には、以下のような問題点がある。
(1)白いボードは、その形状を工夫しない限り、スペースの狭い鉄筋内に挿入できない。すなわち、対象鉄筋の後方に白いボードをうまく設置できない。
(2)別途、マーカを対象鉄筋に貼付する必要がある。
(3)白いボード1枚で主筋及び補強筋の両方を計測することが困難である。
(4)日射や外部の照明により、白いボードに対象鉄筋の影が映り、鉄筋径を誤計測するおそれがある。
【0005】
そこで、撮影時に影の影響を小さくする(影を白っぽくして、2値化により背景バーと同じグループにする)ためにフラッシュ撮影を行い、2値化手法により黒い部分を鉄筋として抽出した。ところが、さらに次のような問題点が発生した。
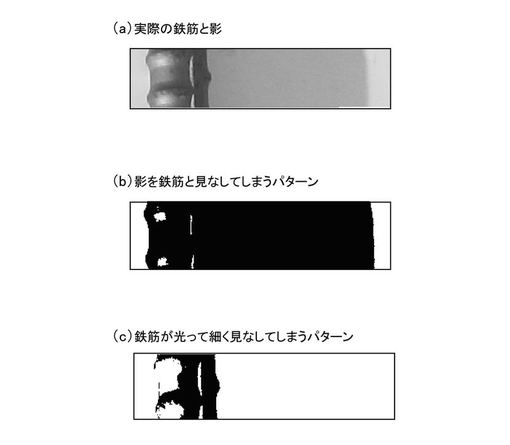
(1)屋外で撮影したときに、日射の影響により鉄筋やその他の影が背景バー上にでき、2値化が精度よくできない(具体的には、鉄筋が実際より太く抽出される)ことがあった(図22(a)及び(b)参照)。
(2)フラッシュ撮影したときに、鉄筋が白く光って、2値化が精度よくできない(具体的には、鉄筋が実際より細く抽出される)ことがあった(図22(a)及び(c)参照)。
(3)2値化が精度よくできないときに、2値化のパラメータを変更すると精度がよくなることがあるが、パラメータの変更は、熟練したユーザでなければ難しい。
以上のように、輝度の閾値だけによる2値化により鉄筋を抽出する手法は、誤検出率が高かった。
【0006】
本発明は、上記課題を鑑みてなされたものであり、その主たる目的は、簡単に精度よく鉄筋の配筋情報を取得することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は、鉄筋を撮影した画像から、鉄筋の領域を抽出する鉄筋領域抽出装置であって、前記画像において、前記鉄筋の軸方向に対して垂直に並んだピクセルの輝度をスキャンし、隣接するピクセル間で輝度が不連続になる箇所を連結して、領域の境界線であるエッジを抽出する第1手段と、前記画像における各ピクセルの輝度分布に基づいて、鉄筋の領域における輝度値の標準値である標準輝度値を計算する第2手段と、前記抽出したエッジに挟まれた各領域における輝度の範囲が、前記計算した標準輝度値を含む場合に、当該領域を鉄筋の領域として特定する第3手段と、を備えることを特徴とする。
【0008】
この構成によれば、鉄筋、鉄筋の影、背景を含む画像において、輝度の不連続箇所を検出することにより、領域の境界線であるエッジを抽出し、2本のエッジに挟まれた部分を、鉄筋又は鉄筋以外の領域とする。その領域の中から、輝度分布に基づく標準輝度値を用いて鉄筋の領域を特定するので、画像を2値化することなく、鉄筋の誤検出を抑止することができる。そして、画像の2値化を行わないので、2値化パラメータの修正等の微調整が不要になる。以上によれば、簡単に精度よく、鉄筋の領域を抽出し、その鉄筋の配筋情報を取得することができる。
【0009】
また、本発明の上記鉄筋領域抽出装置において、前記画像は、前記鉄筋の軸方向に対して垂直な方向に所定の間隔をおいて設けられた複数のパターンを含み、前記第1手段は、前記ピクセルの輝度を、前記パターンに基づく方向にスキャンすることとしてもよい。
この構成によれば、鉄筋を含む画像において、鉄筋の軸方向に対して垂直に並んだピクセルの輝度をスキャンする際に、当該画像に含まれているパターンを用いることにより、スキャンすべき方向を容易に特定することができる。
【0010】
また、本発明の上記鉄筋領域抽出装置において、前記第1手段は、前記隣接するピクセルの輝度に対して微分演算を行い、当該演算値に基づいて、当該輝度が不連続になるピクセルを検出することとしてもよい。
この構成によれば、輝度が不連続になるピクセルを精度よく検出することができるので、エッジを精確に抽出することができる。
【0011】
また、本発明の上記鉄筋領域抽出装置において、前記第1手段は、前記鉄筋の軸方向を縦方向とし、前記抽出した各エッジのうち、その縦幅が背景バーの幅と同等であり、かつ、その縦横比が所定値より大きいエッジを、前記第3手段の処理対象とすることとしてもよい。
この構成によれば、縦幅が背景バーの幅と同等であり、かつ、縦長になっているエッジを、有効なエッジとして残すことにより、エッジに挟まれた領域を精度よく把握することができる。
【0012】
また、本発明の上記鉄筋領域抽出装置において、前記第2手段は、前記画像における各ピクセルの輝度分布から各輝度の度数分布を作成し、当該度数が極大になる輝度値のうち、最小値を前記鉄筋の領域における標準輝度値とすることとしてもよい。
この構成によれば、鉄筋を含む画像は、エッジにより鉄筋、鉄筋の影、板材の背景の3つの領域に分けることができるが、3つの領域の中で、鉄筋の輝度が最も小さくなる。そこで、度数が極大になる輝度値のうち、最小値を鉄筋の領域における標準輝度値とすることにより、エッジに挟まれた領域の中から、鉄筋の領域を容易に特定することができる。
【0013】
また、本発明の上記鉄筋領域抽出装置において、前記第3手段は、前記特定した鉄筋の領域が隣接するときには、当該隣接する領域を統合し、1つの鉄筋領域として特定することとしてもよい。
この構成によれば、1つの鉄筋の領域に、エッジを境界線として隣接する領域が、鉄筋影や板材の背景ではなく、別の鉄筋の領域になっている場合(輝度の異なる2つの鉄筋部分が連続して撮影される場合)がある。このような場合に、別々の鉄筋の領域としてではなく、統合された1つの鉄筋の領域として特定することにより、その後の鉄筋の径やピッチを計算する際に非常に有用になる。
【0014】
また、本発明は、鉄筋領域抽出方法及び鉄筋領域抽出プログラムを含む。その他、本願が開示する課題及びその解決方法は、発明を実施するための形態の欄、及び図面により明らかにされる。なお、本発明は、本出願人による特願2010−211111の発明をさらに改良したものである。
【発明の効果】
【0015】
本発明によれば、簡単に精度よく鉄筋の配筋情報を取得することができる。
【図面の簡単な説明】
【0016】
【図1】配筋情報取得システム1の構成を示す図である。
【図2】携帯端末4のハードウェア構成を示す図である。
【図3】管理サーバ5のハードウェア構成を示す図である。
【図4】配筋情報取得システム1に記憶されるデータの構成を示す図であり、(a)は携帯端末4の記憶部45に記憶されるデータの構成を示し、(b)は管理サーバ5の記憶部55に記憶されるデータの構成を示す。
【図5】異形鉄筋の状態を定義する図であり、(a)はリブ位置0°の状態を示し、(b)はリブ位置90°の状態を示し、(c)はリブ位置60°の状態を示す。
【図6】携帯端末4の鉄筋規格情報452の構成例を示す図である。
【図7】鉄筋画像の撮影方法を示すフローチャートである。
【図8】携帯端末4による画像処理の第1の実施例を示すフローチャートである。
【図9】携帯端末4による鉄筋部分抽出の処理を示すフローチャートである。
【図10】携帯端末4による鉄筋径推定の処理を示すフローチャートである。
【図11】背景バーBに関する図であり、(a)は背景バーBの形状を示し、(b)はマーカの例を示す。
【図12】実際の異形鉄筋の例を示す図である。
【図13】主筋の配筋情報の取得処理を説明するための図であり、主筋及び背景バーBを撮影した画像を示す。
【図14】主筋の配筋情報の取得処理を説明するための図であり、(a)は図13の画像を−φだけ回転した画像を示し、(b)は測定原理を説明するための図を示す。
【図15】(a)は鉄筋を含む画像及び抽出されたエッジの例を示し、(b)はエッジに外接する矩形が縦長である場合を示し、(c)はエッジに外接する矩形が縦長でない場合を示す。
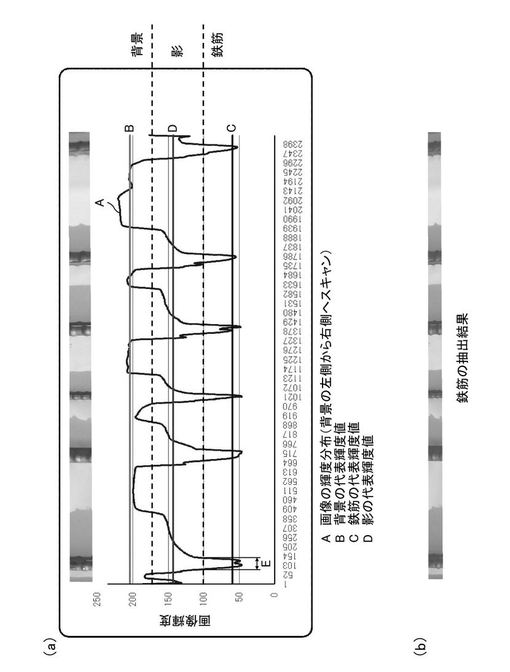
【図16】(a)は鉄筋の軸方向(高さ方向)における1つのピクセル位置の、横方向の輝度分布及び3つの領域の代表輝度値を示し、(b)は鉄筋の抽出結果を示す。
【図17】画像における輝度のヒストグラムを示す図であり、(a)は影の領域がある場合を示し、(b)は影の領域がない場合を示す。
【図18】携帯端末4による画像処理の第2の実施例を示すフローチャートである。
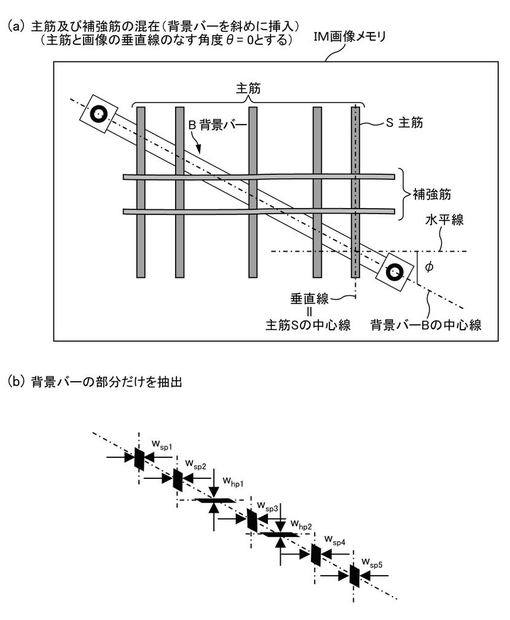
【図19】主筋及び補強筋の配筋情報の取得処理を説明するための図であり、(a)は主筋及び補強筋の間に背景バーbを斜めに挿入した状態の画像を示し、(b)は(a)の画像において背景バーBの部分だけを2値化した画像を示す。
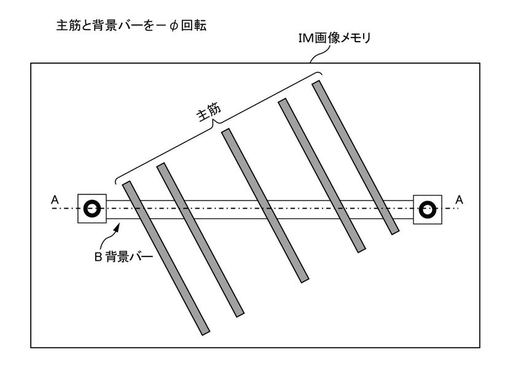
【図20】主筋及び補強筋の配筋情報の取得処理を説明するための図であり、図19(a)の画像のうち、認識された主筋及び背景バーBを時計回りに−φだけ回転した画像を示す。
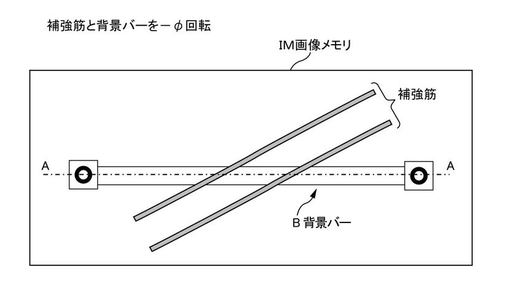
【図21】主筋及び補強筋の配筋情報の取得処理を説明するための図であり、図19(a)の画像のうち、認識された補強筋及び背景バーBを時計回りに−φだけ回転した画像を示す。
【図22】(a)は実際の鉄筋と影の画像を示し、(b)は影を鉄筋と見なしてしまうパターンを示し、(c)は鉄筋が光って細く見なしてしまうパターンを示す。
【発明を実施するための形態】
【0017】
以下、図面を参照しながら、本発明を実施するための最良の形態を説明する。本発明の実施の形態に係る配筋情報取得システムは、建設現場において、マーカ(パターン)を両端に付した背景バーを異形鉄筋の後ろに配置し、デジタルカメラを用いて両端のマーカ及びその間の異形鉄筋を撮影し、携帯端末(配筋情報取得装置)を用いて撮影画像から異形鉄筋の本数、径長及びピッチ(間隔)等の配筋情報を求め、径長の分布から各鉄筋の種類(規格、公称直径や呼び径)を推定するものである。
【0018】
特に、鉄筋を撮影する際にフラッシュを用いないものとし、鉄筋を含む撮影画像における輝度の変化値に基づいて、領域の境界線であるエッジを検出し、そのエッジに挟まれた各領域における輝度の範囲と、画像の輝度分布から計算した、鉄筋の領域における輝度値の代表値(標準値)である代表輝度値(標準輝度値)とに基づいて、鉄筋の領域を特定する。また、背景バーを鉄筋の間に挿入可能な形状にし、その背景バーを斜めに挿入することにより、主筋及びせん断補強筋(以下、簡単に「補強筋」とする)の径長等を同時に計測することができる。なお、本実施の形態では、主筋は、鉛直方向に配置されているものとし、補強筋は、水平方向に配置されているものとする。
【0019】
これによれば、鉄筋部分の誤検出率を大幅に低減することができる。また、現場で簡単に精度よく配筋情報を取得できるので、設計図面情報と比較、照合することにより、その場で出来形の正当性を判断することができる。
【0020】
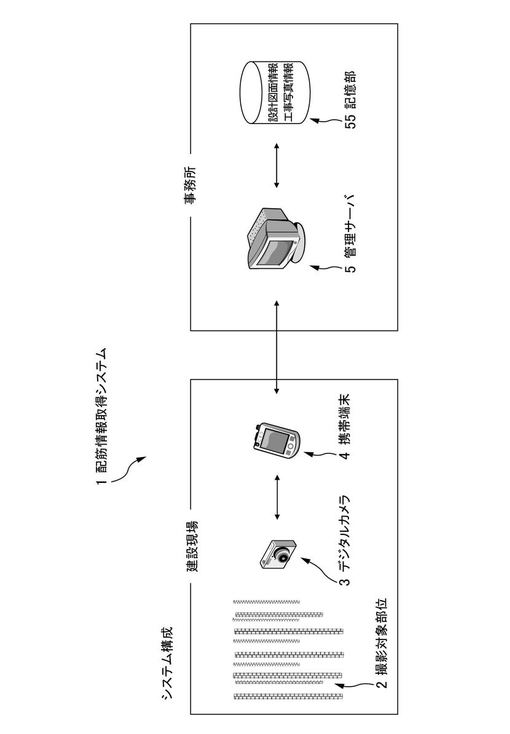
≪システムの構成と概要≫
図1は、配筋情報取得システム1の構成を示す図である。配筋情報取得システム1は、建設現場におけるデジタルカメラ3及び携帯端末4と、事務所における管理サーバ5とを備える。デジタルカメラ3と、携帯端末4との間は、USB(Universal Serial Bus)ケーブル等による接続でデータの送受信が可能である。携帯端末4と、管理サーバ5との間は、無線通信等によりデータの送受信が可能である。
【0021】
デジタルカメラ3は、鉄筋を含む柱、梁、床、壁等の撮影対象部位2を撮影するものであって、画素数が例えば400万画素以上であり、オートフォーカス機能をオフにできるものが用いられる。携帯端末4は、携帯型情報処理機器であり、デジタルカメラ3から撮影したデジタル画像を取り込んで配筋情報を生成し、管理サーバ5から設計図面情報を受信し、配筋情報と、設計図面情報とを比較、照合することにより、出来形が正当か否かを判定する。なお、携帯端末4は、PC(Personal Computer)やサーバで代用してもよい。管理サーバ5は、設計図面情報や工事写真情報を記憶する記憶部55を備え、それらの情報を携帯端末4と送受信する。
【0022】
≪装置の構成≫
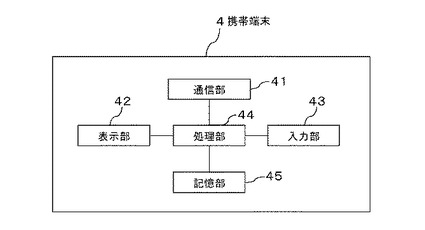
図2は、携帯端末4のハードウェア構成を示す図である。携帯端末4は、通信部41、表示部42、入力部43、処理部44及び記憶部45を備える。通信部41は、デジタルカメラ3や管理サーバ5とデータ通信を行う部分であり、例えば、USBポートやNIC(Network Interface Card)等によって実現される。表示部42は、処理部44からの指示によりデータを表示する部分であり、例えば、液晶ディスプレイ(LCD:Liquid Crystal Display)等によって実現される。入力部43は、オペレータがデータ(例えば、鉄筋規格情報等のデータ)を入力する部分であり、例えば、キーボードやマウス等によって実現される。処理部44は、各部間のデータの受け渡しを行うととともに、携帯端末4全体の制御を行うものであり、CPU(Central Processing Unit)が所定のメモリに格納されたプログラムを実行することによって実現される。記憶部45は、処理部44からデータを記憶したり、記憶したデータを読み出したりするものであり、例えば、フラッシュメモリやハードディスク装置等の不揮発性記憶装置によって実現される。
【0023】
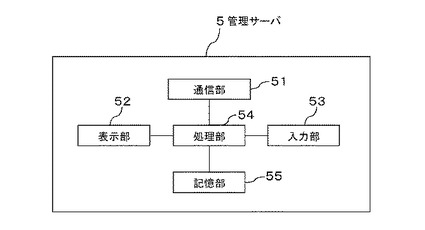
図3は、管理サーバ5のハードウェア構成を示す図である。管理サーバ5は、通信部51、表示部52、入力部53、処理部54及び記憶部55を備える。通信部51は、無線ネットワークを介して携帯端末4とデータ通信を行う部分であり、例えば、NIC等によって実現される。表示部52は、処理部54からの指示によりデータを表示する部分であり、例えば、液晶ディスプレイ等によって実現される。入力部53は、オペレータがデータ(例えば、設計図面情報等のデータ)を入力する部分であり、例えば、キーボードやマウス等によって実現される。処理部54は、各部間のデータの受け渡しを行うととともに、管理サーバ5全体の制御を行うものであり、CPUが所定のメモリに格納されたプログラムを実行することによって実現される。記憶部55は、処理部54からデータを記憶したり、記憶したデータを読み出したりするものであり、例えば、フラッシュメモリやハードディスク装置等の不揮発性記憶装置によって実現される。
【0024】
≪データの構成≫
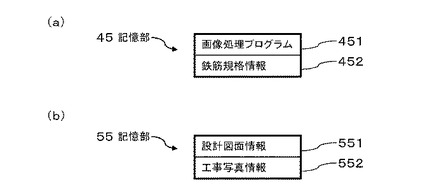
図4は、配筋情報取得システム1に記憶されるデータの構成を示す図である。図4(a)は、携帯端末4の記憶部45に記憶されるデータの構成を示す。記憶部45は、画像処理プログラム451及び鉄筋規格情報452を記憶する。画像処理プログラム451は、デジタルカメラ3で撮影された画像データから配筋情報を取得し、設計図面情報との適合性を判定する処理を行うプログラムであり、当該処理の必要に応じて処理部44の指示により記憶部45から読み出される。鉄筋規格情報(鉄筋種類情報)452は、径長の分布から鉄筋の規格(種類)を求めるために用いられるテーブル情報である。その詳細は、別途説明する。
【0025】
図4(b)は、管理サーバ5の記憶部55に記憶されるデータの構成を示す。記憶部55は、設計図面情報551及び工事写真情報552を予め記憶する。設計図面情報551は、鉄筋等、建造物の設計に係る図面情報(異形鉄筋の径長を含む)であり、管理者により記憶部55に登録され、必要に応じて管理サーバ5から携帯端末4に送信される。工事写真情報552は、実際の建設現場における建造物の写真情報であり、デジタルカメラ3で撮影された写真情報が、携帯端末4経由で管理サーバ5に送信され、記憶部55に記憶される。
【0026】
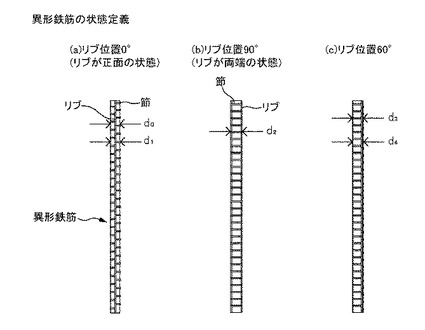
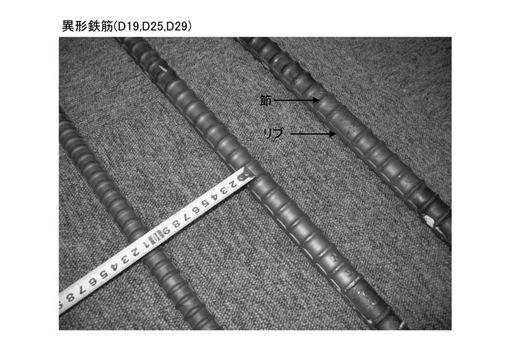
図5は、異形鉄筋の状態を定義する図である。異形鉄筋は、建物の構造用材料の一つであり、鉄製の棒を圧延して表面に凹凸を設けた棒状の鋼材である。凹凸として、図5に示すように、節(フシ)と、リブとが設けられている。鉄筋の軸線に対して垂直な方向から見た(撮影した)場合、リブの位置(角度)によって異形鉄筋の径長が異なる。以下、リブが正面に向いた状態をリブ位置0°として、3つの状態について説明する。
【0027】
図5(a)は、リブ位置0°の状態を示す。この状態のリブは、正面に位置するので、径長には影響しない。図面に向かって右側の節と、左側の節とは、軸線方向に沿って交互に設けられている。従って、異形鉄筋の径長としては、節を含まない径長d0と、1つの節を含む径長d1とが抽出される。
図5(b)は、リブ位置90°の状態を示す。この状態のリブは両端に位置し、節はリブに含まれるので、異形鉄筋の径長としては、両端のリブを含む径長d2が抽出される。
図5(c)は、リブ位置60°の状態を示す。この状態のリブは、突起の高さによっては径長に影響を与える。図面に向かって右側の節は見えるが、左側の節は見えない。従って、異形鉄筋の径長としては、節を含まない径長d3と、1つの節を含む径長d4とが抽出される。なお、図12は、実際の異形鉄筋の例を示す図である。
【0028】
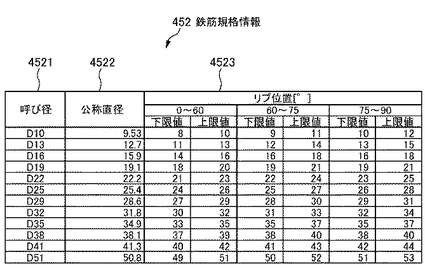
図6は、携帯端末4の鉄筋規格情報452の構成例を示す図である。鉄筋規格情報452は、撮影した鉄筋画像における径長の分布からリブ位置を推定し、さらに該当する鉄筋の規格(種類)を特定するためのテーブル情報であり、呼び径4521、公称直径4522及びリブ位置4523を含むレコードから構成される。呼び径4521は、異形鉄筋の呼び径を示す。公称直径4522は、呼び径4521の異形鉄筋について一般に言われる直径(径長)を示す。リブ位置4523は、リブが正面の状態を0°とした場合のリブの位置(角度)を示すものであり、そのリブ位置4523が0〜60°、60〜75°及び75〜90°の3つの場合に対してそれぞれ径長の下限値及び上限値が示されている。なお、節やリブの形状や大きさに応じて径長の見え方が変わるので、リブ位置4523の範囲は、2つに分けてもよいし、4つ以上に分けてもよい。
【0029】
鉄筋径の推定においては、まず、径長の分布から3つのリブ位置4523のうち、1つが推定され、径長の中央値(median)を下限値及び上限値の範囲と比較、照合し、呼び径4521及び公称直径4522の鉄筋規格を特定する。その詳細は、後記する。
【0030】
≪システムの処理≫
図7は、鉄筋画像の撮影方法を示すフローチャートである。これは、建設現場において、撮影者が背景バー及びデジタルカメラ3を用いて鉄筋を撮影し、その撮影画像を携帯端末4に転送し、携帯端末4を用いて撮影画像から配筋情報を取得する手順を示すものである。
【0031】
まず、撮影者は、デジタルカメラ3を決定する(S701)。その際、400万画素以上の設定が可能であり、かつ、オートフォーカス機能を切れるものか否かを確認し(S702)、その条件が合わなければ(S702のNO)、再度デジタルカメラ3を選び直す(S701)。当該条件が合えば(S702のYES)、決定したデジタルカメラ3のオートフォーカス機能をオフにし、撮影対象部位2と、デジタルカメラ3との間の適正な距離(例えば、2m)で焦点が合うように調節する(S703)。これ以降は、焦点距離を一定とする。そして、キャリブレーションボードを撮影し、カメラパラメータを取得する(S704)。これは、カメラキャリブレーションと呼ばれるもので、格子模様や等間隔ドットを印刷した紙であるボードを撮影することにより、デジタルカメラ3の歪み等を検出するものである。
【0032】
次に、撮影者は、鉄筋を含む撮影対象部位2を決定し(S705)、その鉄筋の背後に背景バーを挿入する(S706)。背景バーを固定するために、主筋だけがある場合には、磁石等を用いることが考えられ、一方、主筋及び補強筋の両方がある場合には、入り組んだ鉄筋の間に立て掛けるだけでもよい。
【0033】
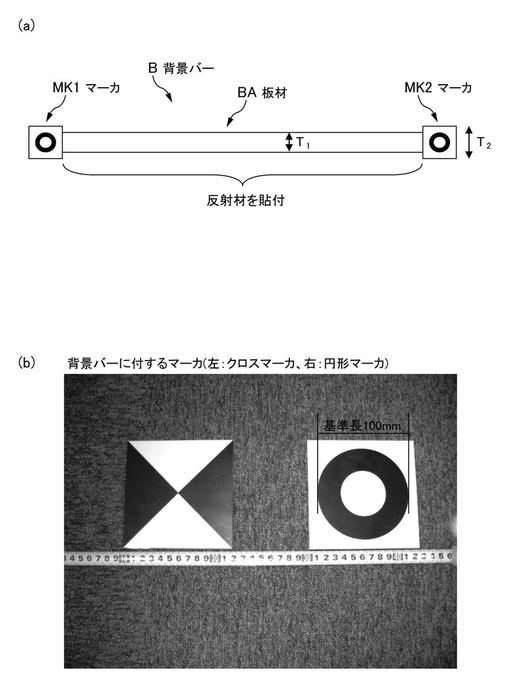
図11(a)は、背景バーBの形状を示す図である。背景バーBは、板材BA、マーカMK1及びMK2からなる。板材BAは、鉄筋を撮影する際の背景になる帯状の板材であり、少なくとも一方の面に鉄筋と異なる色(例えば、白色)が着けられる。
【0034】
板材BAの幅T1は、異形鉄筋のフシのピッチ(例えば、20mm)より大きく、かつ、補強筋の間隔(例えば、100mm)より小さく、例えば、50mmに形成される。一方、マーカMK1及びMK2は、板材BAの両端に付され、その幅T2は、補強筋の間隔(例えば、100mm)より小さく、例えば、70mm以下に形成される。
【0035】
これによれば、板材BAの幅T1がフシのピッチより大きいので、背景バーBの位置にかかわらず、背景バーBの前にいずれかのフシが必ず存在した状態で撮影できる。従って、フシの分布を把握しつつ、鉄筋の最大径長を計測できる。そのとき、幅T1が限られた大きさなので、計算時間の短縮を図れる。また、板材BAの幅T1及びマーカMK1、MK2の幅T2が補強筋のピッチより小さいので、補強筋と干渉することなく、容易に背景バーBを鉄筋内に挿入することができる。
【0036】
マーカは、自然界に存在しない特徴的な形状であり、事前にその大きさ(寸法)が分かっているものであって、マーカの大きさと、撮影した画像におけるマーカ内のピクセル数とから1ピクセル当たりの長さ(1ピクセル長)を求め、一方、2つのマーカMK1と、MK2との間をスキャンすることによりその間にある鉄筋を認識し、さらには、撮影対象部位2と、デジタルカメラ3との間の距離を推定するために用いられる。
【0037】
図11(b)は、マーカの例を示す図である。クロスマーカ及び円形マーカが示されている。背景バーBにマーカMK1、MK2を付与し、背景バーBを鉄筋の背後に設置することにより、デジタルカメラ3から同一の距離にあるマーカ及び鉄筋を撮影できるため、撮影された画像データにおいて、マーカと鉄筋との間で1ピクセル当たりの長さが等しくなるので、精度よく径長やピッチを求めることができる。
【0038】
そして、対象を適正な距離(例えば、2m)だけ離れた位置からデジタルカメラ3で撮影し(S707)、撮影画像を携帯端末4に転送し、画像処理を実行する(S708)。なお、デジタルカメラ3の撮影方向の垂直角度は約0°とし、水平角度は任意とする。携帯端末4による画像処理の詳細は、後記する。画像処理の後、携帯端末4の表示部42に計算結果が表示される(S709)。そして、その計算結果が、設計図面情報の鉄筋径、ピッチであれば(S710のYES)、配筋状態が正常であるとして、撮影作業を終了する。一方、計算結果が設計図面情報の鉄筋径、ピッチでなければ(S710のNO)、撮影者は、配筋の是正を現場の作業者に指示し(S711)、是正が実施された後、撮影対象部位2を再度決定し(S705)、撮影作業を行う。
【0039】
図8は、携帯端末4による画像処理の第1の実施例を示すフローチャートである。この処理は、携帯端末4がデジタルカメラ3から画像データを取得し、内蔵の画像メモリに格納したときに行われる。この実施例では、撮影対象部位2が主筋のみの場合の処理について説明する。
【0040】
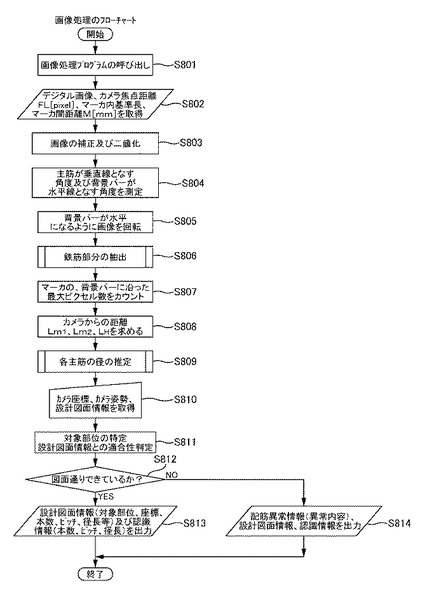
まず、携帯端末4は、画像処理プログラムを呼び出す(S801)。具体的には、処理部54が、記憶部55から画像処理プログラム451を読み出し、主記憶装置(メインメモリ)にロードし、プログラムカウンタ(制御ポインタ)を画像処理プログラム451の開始アドレスに位置付ける。これにより、携帯端末4の処理部44が画像処理プログラム451に従って処理を開始する。その処理フローがS802〜S814に示されている。
【0041】
まず、携帯端末4(処理部44)は、デジタル画像、カメラ焦点距離FL[pixel]、マーカMK1、MK2内の基準長[mm]及びマーカ間距離M[mm]を取得する(S802)。デジタル画像は、デジタルカメラ3から、USBケーブルを経由して画像メモリ内に取得する。カメラ焦点距離FL、マーカ内基準長及びマーカ間距離Mは、撮影者の操作により入力部53を通じて取得する。なお、マーカ内基準長は、マーカMK1、MK2における基準となる長さであり、例えば、円形マーカならば、その円の直径の長さが適用される。次に、画像の補正及び二値化を行う(S803)。具体的には、S704で取得したカメラパラメータを用いてデジタル画像の歪み等を補正し、補正したデジタル画像をピクセル値=0(黒)又は1(白)の白黒画像に変換する。
【0042】
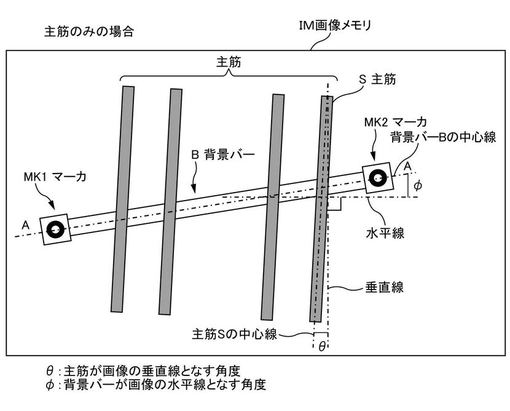
続いて、携帯端末4は、二値化された画像データから、主筋Sが垂直線となす角度及び背景バーBが水平線となす角度を測定する(S804)。図13を用いて説明すると、垂直線は、画像メモリIMにおけるピクセル配置の縦方向に平行な直線を意味し、水平線は、画像メモリIMにおけるピクセル配置の横方向に平行な直線を意味するものとする。角度は、時計回りの方向を正とする。そして、画像メモリIMにおいて縦方向に延びる、ピクセル値が0(黒)の矩形領域を主筋Sとし、その矩形の長辺に平行で、かつ、その矩形の中心を通る直線を主筋Sの中心線として抽出し、その中心線と、垂直線との間の角度をθとする。また、マーカMK1及びMK2の中心を通る直線を背景バーBの中心線として抽出し、その中心線と、水平線との間の角度をφとする。
【0043】
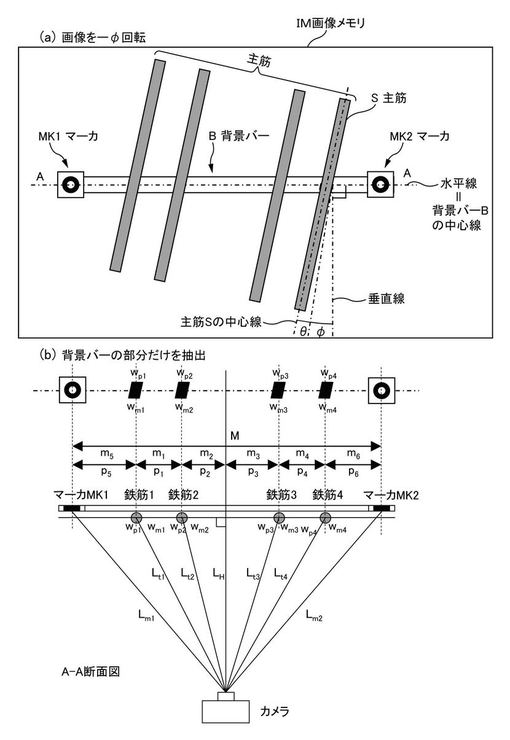
続いて、携帯端末4は、元の画像を時計回りに−φだけ回転し、背景バーBを水平線と平行にする(S805)。図14(a)は、図13の画像を−φだけ回転したものであり、背景バーBの中心線が水平線と平行になっている。
【0044】
次に、鉄筋部分の画像を抽出する(S806)。図14(b)の上方には、背景バーBの、マーカ及び鉄筋部分を抽出した画像が示されている。そして、マーカMK1、MK2の、背景バーBに沿った最大ピクセル数をカウントする(S807)。具体的には、マーカである円形の直径のうち、最大の直径を特定し、その径長に含まれるピクセル数をカウントする。そして、マーカ内基準長をピクセル数で除することにより、1ピクセル当たりの長さが求められる。これによれば、円形のマーカを用いることにより、どの方向からマーカを見ても最大直径が一定になるので、マーカの向きが変わっても精度よく1ピクセル当たりの長さを特定することができる。さらに、カメラからの距離Lm1、Lm2、LHを求める。(S808)。図14(b)に示すように、距離Lm1は、カメラと、マーカMK1との間の距離である。距離Lm2は、カメラと、マーカMK2との間の距離である。距離LHは、カメラと、背景バーBとの間の最短距離であり、カメラと、各鉄筋との間の距離を計算する際に用いられる。各距離は、以下の式1、2、3によって求められる。
Lm1=FL×(マーカMK1の基準長/マーカMK1のピクセル数)・・・式1
Lm2=FL×(マーカMK2の基準長/マーカMK2のピクセル数)・・・式2
LH=√(Lm12−(Lm12−Lm22+M2)2/4M2) ・・・式3
【0045】
さらに、携帯端末4は、各主筋の径を推定する(S809)。主筋の径長を推定することによって、鉄筋としての種類を特定する。この処理の詳細は、サブルーチンの処理として別途説明する。
【0046】
次に、携帯端末4は、デジタルカメラ3の座標(位置)、姿勢及び設計図面情報を取得する(S810)。デジタルカメラ3の座標は、例えば、GPS(Global Positioning System)機器を接続することにより、撮影画像に付与される位置情報として取得する。デジタルカメラ3の姿勢は、撮影時のカメラ姿勢を検知する機能(デジタルカメラ3又は接続機器の機能)により取得する。設計図面情報は、携帯端末4が、管理サーバ5の記憶部55に記憶された設計図面情報551を受信することにより、取得する。そして、撮影された画像の対象部位(工事箇所)を特定し、該当する設計図面情報との適合性を判定する(S811)。例えば、推定した異形鉄筋の径長と、設計図面情報に含まれる異形鉄筋の径長との適合性を判定する。
【0047】
図面通りできていれば(S812のYES)、携帯端末4は、設計図面情報及び認識情報を表示部42に出力する(S813)。設計図面情報は、図面上の鉄筋の対象部位、座標、本数、ピッチ、径長等である。認識情報は、実際の鉄筋の本数、ピッチ及び径長である。図面通りできていなければ(S812のNO)、異常内容を示す配筋異常情報、設計図面情報及び認識情報を表示部42に出力する(S814)。なお、適合性の判定結果を表示部42に出力するのではなく、通信部41を通じて他の装置に送信することも可能である。
【0048】
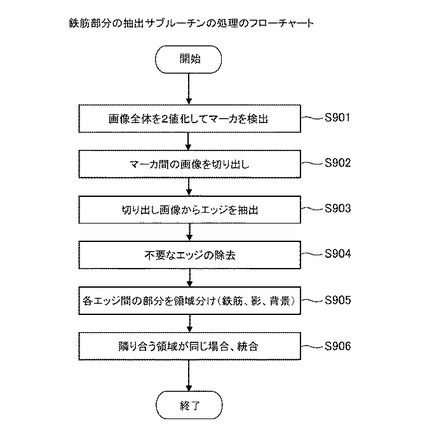
図9は、携帯端末4による鉄筋部分抽出の処理を示すフローチャートである。これは、画像処理プログラムのうち、鉄筋部分の抽出サブルーチンの処理であり、背景バーの部分の画像からエッジ(領域の境界線)を抽出し、2つのエッジで挟まれた各部分が3つの領域のいずれかを判別することにより、それらの領域の1つとして鉄筋部分を特定するものである。
【0049】
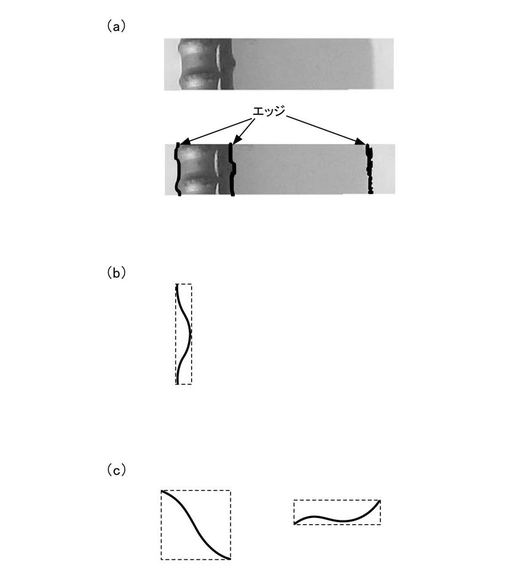
まず、携帯端末4は、背景バーBの部分に相当する画像全体を2値化して、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。このとき、切り出された画像は、2値化されていないものとする。図15(a)の上図は、切り出された画像の例を示す。
【0050】
そして、携帯端末4は、切り出された画像からエッジを抽出する(S903)。エッジとは、画像における3つの領域(鉄筋、影、背景)の境界線である。例えば、画像の、鉄筋の軸方向に対して垂直に並んだピクセルの輝度をスキャンしたときに、その輝度が不連続になる(急激に変化する)箇所がエッジになる。そこで、例えば、スキャン方向に隣接するピクセルの輝度をラプラシアン(2次微分)フィルター処理して、その演算値の絶対値が所定値以上の箇所(詳細には、例えば、隣接する2つのピクセルの中間)を検出し、各検出箇所を連結した線をエッジとして抽出する。ピクセルの輝度をスキャンすべき方向は、例えば、図11(a)に示す、背景バーBの画像においてマーカMK1及びMK2を検出したときに、マーカMK1からMK2への方向(背景バーBの長手方向)である。図15(a)の下図は、抽出されたエッジの例を示す。なお、輝度が不連続な箇所を検出する際に、1次微分フィルター処理を用いることもできる。
【0051】
続いて、携帯端末4は、抽出されたエッジのうち、不要なエッジを除去する(S904)。例えば、鉄筋の軸方向を縦方向とし、各エッジに対して外接する矩形を描いて、その矩形の縦幅及び縦横比を計算する。そして、描いた矩形の縦幅が背景バーBの幅と同等であり、かつ、図15(b)に示すように、その矩形が縦長(縦横比>α)であるエッジを残す。一方、矩形の縦幅が背景バーBの幅より小さい場合、又は、図15(c)に示すように、矩形が縦長でない(縦横比≦α)、すなわち、正方形か、横長である場合には、当該エッジを除外する。なお、縦長か否かを判定するための縦横比の閾値αは、1以上の所定値である。
【0052】
次に、携帯端末4は、各エッジ間の部分を3つの領域(鉄筋、影、背景)に分ける(S905)。例えば、図16(a)のAで示される、鉄筋の軸方向に垂直な方向での輝度分布が得られたとする。この輝度分布は、背景の左側から右側へピクセルの輝度をスキャンしたものである。その画像全体に含まれるピクセルの輝度分布に対してヒストグラム(度数分布)を作成し、極大値(度数が極大になる輝度値)のラベリングを行う。そして、ラベリングした極大値から、各領域の代表輝度値及び中間輝度値を計算する。
【0053】
以下では、画像の輝度分布に基づいて3つの領域の代表輝度値を計算し、その代表輝度値に基づいて、エッジに挟まれた部分がいずれの領域であるかを特定する手順を説明する。
【0054】
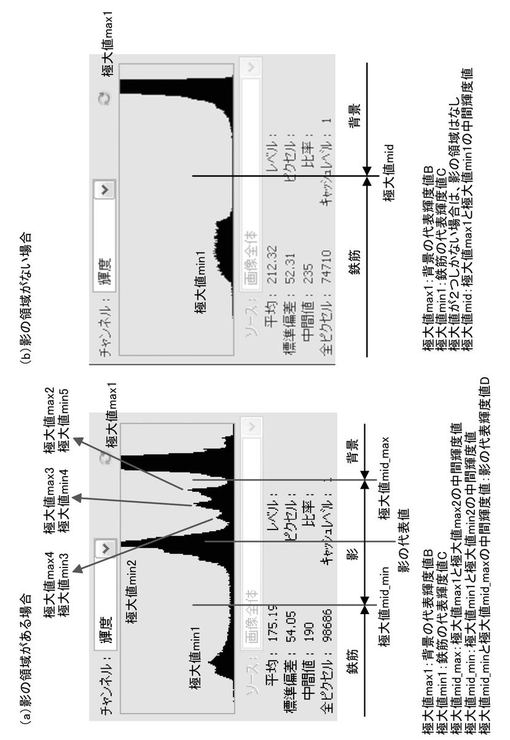
図17は、画像輝度のヒストグラムを示す図であり、横軸は輝度、縦軸は度数を示す。図17(a)は、影の領域がある場合を示す。6個の極大値があり、輝度の小さい方から順にmin1、min2、・・・とラベリングされ、一方、輝度の大きい方から順にmax1、max2、・・・とラベリングされる。そして、極大値max1は、輝度が最大の極大値であり、背景の代表輝度値Bになる。極大値min1は、輝度が最小の極大値であり、鉄筋の代表輝度値Cになる。また、極大値max1及び極大値max2の中間輝度値を極大値mid_maxとする。次に、極大値min1及び極大値min2の中間輝度値を極大値mid_minとする。このとき、極大値mid_max及び極大値mid_minの中間輝度値は、影の代表輝度値Dになる。
【0055】
図17(b)は、影の領域がない場合を示す。影の領域がない場合には、鉄筋の次にすぐ背景が来ることになる。2個の極大値があり、輝度の小さい方が極大値min1とラベリングされ、一方、輝度の大きい方が極大値max1とラベリングされる。そして、極大値max1は、背景の代表輝度値Bになる。極大値min1は、鉄筋の代表輝度値Cになる。極大値が2つしかない場合に、影の領域はないと考えられる。
【0056】
図17(a)のヒストグラムから、図16(a)に示すように、背景の代表輝度値B、鉄筋の代表輝度値C及び影の代表輝度値Dが特定される。そこで、エッジ間の領域を、代表輝度値に基づいて鉄筋、影、背景のいずれかに特定する。詳細には、エッジに挟まれる各領域での輝度の範囲が決まるので、その範囲に代表輝度値B、C、Dのいずれが含まれるかに応じて、背景、鉄筋、影のいずれかを領域として特定する。例えば、Eの領域の輝度範囲は代表輝度値Cを含むので、鉄筋部分であることが分かる。
【0057】
さらに、携帯端末4は、特定した領域のうち、隣り合う領域が同じである場合、領域を統合する(S906)。例えば、3つのエッジがあった場合、エッジで挟まれた、2つの領域が形成されるが、その2つの領域がともに鉄筋であれば、中央のエッジをなくし、両端のエッジで挟まれた領域を1つの鉄筋領域とする。
【0058】
以上の処理の結果、図16(b)に示すように、鉄筋が抽出される。なお、図16(b)にはないが、鉄筋及び影の次に、背景ではなく、鉄筋が来る(すなわち、鉄筋、影、鉄筋となる)こともある。
【0059】
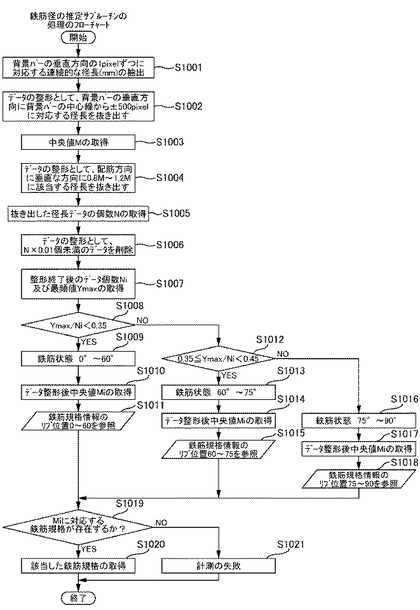
図10は、携帯端末4による鉄筋径推定の処理を示すフローチャートである。これは、画像処理プログラムのうち、主筋及び補強筋を含む鉄筋径の推定サブルーチンの処理であり、二値化した画像データから、各鉄筋の連続的な径長を抽出し、その径長データを整形してデータの個数及び最頻値を求め、最頻値を個数で除した値(径長データのばらつきの指標値)に応じて鉄筋の規格を特定するものである。
【0060】
まず、携帯端末4は、背景バーBに対して垂直方向の1pixelずつの位置に対応する連続的な径長[mm]を抽出する(S1001)。図14(b)で説明すると、まず、背景バーBに対して垂直方向の所定位置においてマーカMK1からMK2へ、ピクセル値が0(黒)のピクセルをサーチし、鉄筋径の背景バーBに沿ったピクセル数Wpを求める。そのとき、鉄筋、マーカ間の背景バーBに沿ったピクセル数Pも求める。ここで、鉄筋間のピクセル数、すなわち、配筋ピッチは、隣り合う鉄筋の中心軸間の間隔を示すものであり、例えば、左側エッジ間ピクセル数及び右側エッジ間ピクセル数の平均値として算出される。
【0061】
続いて、鉄筋、マーカ間の背景バーBに沿った距離mを求め、カメラから各鉄筋までの距離Ltを求め、各鉄筋径Wm及び鉄筋ピッチm’を求める。例えば、図14(b)の鉄筋2に関しては、以下の式4、5、6、7で求められる。なお、式6及び式7は、主筋に関する計算式である。補強筋に関しては、後記する。
m2=M×P2/ΣPn (ΣPn:n=1〜6) ・・・式4
Lt2=√(LH2+m22) ・・・式5
Wm2=WP2×Lt2/FL×cos(φ+θ) ・・・式6
m2’=m2×cos(φ+θ) ・・・式7
Lt1を求めるときには、式4のP2をP1+P2に置き換える。Lt3を求めるときには、式4のP2をP3に置き換える。Lt4を求めるときには、式4のP2をP3+P4に置き換える。
【0062】
次に、携帯端末4は、データの整形として、背景バーBに対して垂直方向に、背景バーBの中心線から、例えば、±500pixelの位置に対応する径長を抜き出す(S1002)。そして、抜き出した1000個の径長の中央値Mを取得する(S1003)。この場合、中央値Mは、500番目の径長と、501番目の径長との平均値になる。さらに、データの整形として、1000個の径長データのうち、0.8M〜1.2Mに該当するデータを抜き出す(S1004)。そして、抜き出した径長データの個数Nを取得する(S1005)。さらに、データの整形として、N×0.01個未満のデータを削除する(S1006)。これによれば、径長データの個数Nの1%に満たない個数のデータを除外するので、測定誤差等によって生じる、極端に大きい、又は、極端に小さい径長データ等を排除することができる。その後、整形終了後のデータ個数Ni及び最頻値Ymaxを取得する(S1007)。
【0063】
そこで、Ymax/Niの値を求め、その値に応じて鉄筋の状態(リブ位置)を推定する。これは、異形鉄筋には節及びリブが設けられているため、鉄筋の向きによって節及びリブの見え方が変わり、抽出される径長データの分布も変わるので、逆に径長データのばらつきの指標値から鉄筋の向きを推定するものである。
【0064】
まず、Ymax/Niの値が0.35未満の場合(S1008のYES)、鉄筋の状態(リブ位置)が0°〜60°であり(S1009)、データ整形後の中央値Miを取得し(S1010)、記憶部45の鉄筋規格情報452(図6参照)におけるリブ位置4523のうち、0〜60の欄を参照する(S1011)。Ymax/Niの値が0.35以上、かつ、0.45未満の場合(S1012のYES)、鉄筋の状態(リブ位置)が60°〜75°であり(S1013)、データ整形後の中央値Miを取得し(S1014)、記憶部45の鉄筋規格情報452におけるリブ位置4523のうち、60〜75の欄を参照する(S1015)。Ymax/Niの値が0.45以上の場合(S1012のNO)、鉄筋の状態(リブ位置)が75°〜90°であり(S1016)、データ整形後の中央値Miを取得し(S1017)、記憶部45の鉄筋規格情報452におけるリブ位置4523のうち、75〜90の欄を参照する(S1018)。
【0065】
鉄筋規格情報452を参照した結果、中央値Miに対応する鉄筋規格(呼び径4521及び公称直径4522)が存在するか否かを判定する(S1019)。具体的には、中央値Miを含む径長の下限値と上限値の組合せが各欄にあるか否かを判定する。存在すれば(S1019のYES)、該当した鉄筋規格を取得する。存在しなければ(S1019のNO)、計測が失敗したことになる(S1021)。これによれば、鉄筋のリブ位置(向き)に対応した鉄筋規格情報452を用いるので、どの角度から撮影したとしても、精度よく鉄筋規格を取得することができる。
【0066】
≪主筋及び補強筋が混在する場合の処理≫
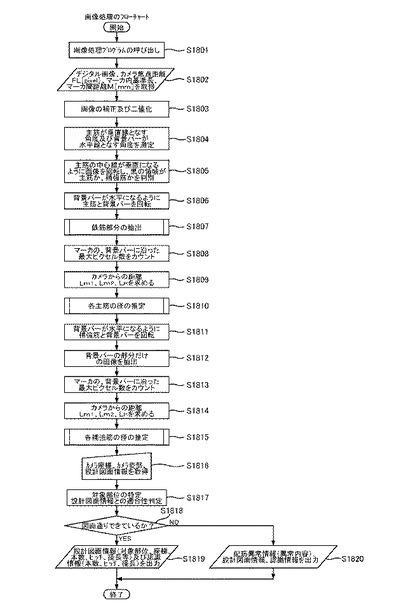
図18は、携帯端末4による画像処理の第2の実施例を示すフローチャートであり、図8のフローチャートにS1805、S1811〜S1815の処理を追加したものである。この実施例では、撮影対象部位2において主筋及び補強筋が混在している場合に、主筋と、補強筋とを判別し、それぞれの配筋情報を取得する処理について説明する。
【0067】
まず、携帯端末4は、図8のS801〜S804の処理と同様に、画像処理プログラムを呼び出し、デジタル画像や焦点距離等を取得し、画像の二値化を行い、主筋Sが垂直線となす角度θを測定する(S1801〜S1804)。続いて、S1803で二値化した画像データを時計回りに−θだけ回転し、主筋Sの中心線が垂直線と平行になるようにし、背景バーBの部分だけを対象として抽出した、ピクセル値が0(黒)の領域について、主筋か、補強筋かを判別する(S1805)。このとき、黒の領域の個数により鉄筋の本数が分かる。
【0068】
図19〜図21は、主筋及び補強筋が混在したときの処理を説明するための図である。図19(a)は、主筋及び補強筋の間に背景バーBを斜めに挿入した状態の画像を示し、主筋と補強筋とのなす角度が90°であり、主筋Sの中心線が垂直線と平行であり、背景バーBの中心線と水平線とのなす角度がφである。次に、図19(b)は、図19(a)の画像において背景バーBの部分だけを抽出した画像を示す。その画像の、ピクセル値が0(黒)の領域について、中心線と水平線とのなす角度が90°の箇所が主筋と認識され、Wspi(i=1〜5)が主筋の径長となる。一方、中心線と水平線とのなす角度が0°の箇所が補強筋と認識され、Whpj(j=1、2)が補強筋の径長となる。
【0069】
次に、携帯端末4は、背景バーBの中心線が水平線と平行になるように、主筋及び背景バーBを−φ回転する(S1806)。図20は、図19(a)の画像のうち、認識された主筋及び背景バーBを時計回りに−φだけ回転した画像を示す。そして、背景バーBの部分だけの画像を抽出する(S1807)と、図14(b)の上方に示すような、マーカ及び主筋の画像になるので、図8のS807〜S809の処理と同様に、各主筋の径長及びピッチを計算する(S1808〜S1810)。詳細には、式1〜7により計算するが、式6及び式7において、cos(φ+θ)の代わりにcosφを用いる。
【0070】
続いて、携帯端末4は、背景バーBの中心線が水平線と平行になるように、補強筋及び背景バーBを−φ回転する(S1811)。図21は、図19(a)の画像のうち、認識された補強筋及び背景バーBを時計回りに−φだけ回転した画像を示す。そして、背景バーBの部分だけの画像を抽出する(S1812)と、図14(b)の上方に示すような、マーカ及び補強筋の画像になるので、図8のS807〜S809の処理と同様に、各補強筋の径長及びピッチを計算する(S1813〜S1815)。詳細には、式1〜7により計算するが、式6及び式7において、cos(φ+θ)の代わりにsinφを用いる。
【0071】
さらに、携帯端末4は、図8のS810〜S814の処理と同様に、計算した配筋情報が設計図面情報の通りか否かを判断し、その結果に応じた情報を出力する(S1816〜S1820)。
【0072】
以上本発明の実施の形態について説明したが、図1に示す配筋情報取得システム1の各装置を機能させるために、各装置の処理部で実行されるプログラムをコンピュータにより読み取り可能な記録媒体に記録し、その記録したプログラムをコンピュータに読み込ませ、実行させることにより、本発明の実施の形態に係る配筋情報取得システム1が実現されるものとする。なお、プログラムをインターネット等のネットワーク経由でコンピュータに提供してもよいし、プログラムが書き込まれた半導体チップ等をコンピュータに組み込んでもよい。
【0073】
以上説明した本発明の実施の形態によれば、まず、マーカMK1及びMK2と、白い板材BAとを一体化した背景バーBを鉄筋内に挿入すればよいので、対象鉄筋に直接貼付するマーカや目盛り付きの定規が不要になり、撮影する前にセットするものが少なくて済む。次に、1つの背景バーBを用いることにより、主筋及び補強筋の両方の配筋情報を簡便に取得することが可能である。
【0074】
そして、フラッシュを用いることなく、撮影した画像において、輝度の不連続箇所を検出することにより、エッジを抽出するとともに、輝度分布から計算した代表輝度値に基づいて、エッジに挟まれた領域から鉄筋の領域を抽出するので、鉄筋部分の誤検出率を大幅に低減することができる。そして、影の部分を抽出することにより、さらに誤検出をなくすことができる。また、2値化パラメータ修正等の微調整は不要になり、簡単なプログラムにより鉄筋部分を抽出することができる。
【0075】
≪その他の実施の形態≫
以上、本発明を実施するための最良の形態について説明したが、上記実施の形態は本発明の理解を容易にするためのものであり、本発明を限定して解釈するためのものではない。本発明はその趣旨を逸脱することなく変更、改良され得るとともに、本発明にはその等価物も含まれる。例えば、以下のような実施の形態が考えられる。
【0076】
(1)上記実施の形態においては、図10のS1003で1000個の径長データから中央値を取得するものとしたが、他の代表値(例えば、最頻値等)を取得するようにしてもよい。
【0077】
(2)マーカは円形に限らず、例えば、正面から見たときに四角形のものであってもよい。また、マーカは、板材BAの両端に2つ設けられるのに限らず、板材BAの長手方向に所定の間隔をおいて3つ以上設けられてもよい。このとき、配筋情報を取得する必要のある鉄筋を選択し、複数のマーカから、選択した鉄筋を挟む位置にある2つのマーカを特定し、その2つのマーカを用いることが考えられる。
【0078】
(3)主筋Sが垂直線となす角度及び背景バーBが水平線となす角度を測定し、それらの角度を用いるものとしたが、垂直線や水平線に限らず、画像メモリIMにおけるピクセル配置の縦方向又は横方向に対する角度が確定していれば、他の基準線を使ってもよく、また、主筋S及び背景バーBそれぞれに対する2つの基準線に限らず、1つの基準線を使ってもよい。
【0079】
(4)上記実施形態においては、例えば図14(b)に示すように、カメラと背景バーとが正対(カメラの光軸と背景バーとが直交)していることを前提として説明したが、カメラと鉄筋及び背景バーとが正対しておらず、例えば、背景バーがカメラに対して奥行方法に傾斜している場合にも上記実施形態と同じ式1〜7により鉄筋の径長等を計測することが可能である。
【符号の説明】
【0080】
1 配筋情報取得システム
2 撮影対象部位
3 デジタルカメラ
4 携帯端末(配筋情報取得装置、情報処理装置)
44 処理部
45 記憶部
451 鉄筋規格情報(鉄筋種類情報)
5 管理サーバ
B 背景バー(鉄筋撮影用具)
BA 板材
FL 焦点距離
Lm、LH、Lt カメラからの距離
MK1、MK2 マーカ(パターン)
Wp ピクセル数
【技術分野】
【0001】
本発明は、鉄筋、鉄筋の影、背景を含む撮影画像から鉄筋の領域を抽出する装置、方法及びプログラムに関する。
【背景技術】
【0002】
建築工事の現場においては、鉄筋コンクリート構造物の鉄筋を撮影し、その撮影した画像をコンピュータで処理すること(画像処理)により、鉄筋の本数、径及びピッチを計測する。そのとき、撮影対象となる鉄筋(対象鉄筋)は、通常、後方に位置する別の鉄筋や、様々な背景と重なるので、対象鉄筋の画像が不鮮明になり、画像処理の結果として計測される径長等の精度が悪くなる。そこで、画像処理による計測結果の精度を向上させるために、対象鉄筋だけを鮮明に撮影できるように、その後方に白いボードを設置することが必要になる。特許文献1には配筋情報取得装置及びその方法が開示されており、段落0033には白いボードの設置に関して記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−122008号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の配筋情報取得方法には、以下のような問題点がある。
(1)白いボードは、その形状を工夫しない限り、スペースの狭い鉄筋内に挿入できない。すなわち、対象鉄筋の後方に白いボードをうまく設置できない。
(2)別途、マーカを対象鉄筋に貼付する必要がある。
(3)白いボード1枚で主筋及び補強筋の両方を計測することが困難である。
(4)日射や外部の照明により、白いボードに対象鉄筋の影が映り、鉄筋径を誤計測するおそれがある。
【0005】
そこで、撮影時に影の影響を小さくする(影を白っぽくして、2値化により背景バーと同じグループにする)ためにフラッシュ撮影を行い、2値化手法により黒い部分を鉄筋として抽出した。ところが、さらに次のような問題点が発生した。
(1)屋外で撮影したときに、日射の影響により鉄筋やその他の影が背景バー上にでき、2値化が精度よくできない(具体的には、鉄筋が実際より太く抽出される)ことがあった(図22(a)及び(b)参照)。
(2)フラッシュ撮影したときに、鉄筋が白く光って、2値化が精度よくできない(具体的には、鉄筋が実際より細く抽出される)ことがあった(図22(a)及び(c)参照)。
(3)2値化が精度よくできないときに、2値化のパラメータを変更すると精度がよくなることがあるが、パラメータの変更は、熟練したユーザでなければ難しい。
以上のように、輝度の閾値だけによる2値化により鉄筋を抽出する手法は、誤検出率が高かった。
【0006】
本発明は、上記課題を鑑みてなされたものであり、その主たる目的は、簡単に精度よく鉄筋の配筋情報を取得することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は、鉄筋を撮影した画像から、鉄筋の領域を抽出する鉄筋領域抽出装置であって、前記画像において、前記鉄筋の軸方向に対して垂直に並んだピクセルの輝度をスキャンし、隣接するピクセル間で輝度が不連続になる箇所を連結して、領域の境界線であるエッジを抽出する第1手段と、前記画像における各ピクセルの輝度分布に基づいて、鉄筋の領域における輝度値の標準値である標準輝度値を計算する第2手段と、前記抽出したエッジに挟まれた各領域における輝度の範囲が、前記計算した標準輝度値を含む場合に、当該領域を鉄筋の領域として特定する第3手段と、を備えることを特徴とする。
【0008】
この構成によれば、鉄筋、鉄筋の影、背景を含む画像において、輝度の不連続箇所を検出することにより、領域の境界線であるエッジを抽出し、2本のエッジに挟まれた部分を、鉄筋又は鉄筋以外の領域とする。その領域の中から、輝度分布に基づく標準輝度値を用いて鉄筋の領域を特定するので、画像を2値化することなく、鉄筋の誤検出を抑止することができる。そして、画像の2値化を行わないので、2値化パラメータの修正等の微調整が不要になる。以上によれば、簡単に精度よく、鉄筋の領域を抽出し、その鉄筋の配筋情報を取得することができる。
【0009】
また、本発明の上記鉄筋領域抽出装置において、前記画像は、前記鉄筋の軸方向に対して垂直な方向に所定の間隔をおいて設けられた複数のパターンを含み、前記第1手段は、前記ピクセルの輝度を、前記パターンに基づく方向にスキャンすることとしてもよい。
この構成によれば、鉄筋を含む画像において、鉄筋の軸方向に対して垂直に並んだピクセルの輝度をスキャンする際に、当該画像に含まれているパターンを用いることにより、スキャンすべき方向を容易に特定することができる。
【0010】
また、本発明の上記鉄筋領域抽出装置において、前記第1手段は、前記隣接するピクセルの輝度に対して微分演算を行い、当該演算値に基づいて、当該輝度が不連続になるピクセルを検出することとしてもよい。
この構成によれば、輝度が不連続になるピクセルを精度よく検出することができるので、エッジを精確に抽出することができる。
【0011】
また、本発明の上記鉄筋領域抽出装置において、前記第1手段は、前記鉄筋の軸方向を縦方向とし、前記抽出した各エッジのうち、その縦幅が背景バーの幅と同等であり、かつ、その縦横比が所定値より大きいエッジを、前記第3手段の処理対象とすることとしてもよい。
この構成によれば、縦幅が背景バーの幅と同等であり、かつ、縦長になっているエッジを、有効なエッジとして残すことにより、エッジに挟まれた領域を精度よく把握することができる。
【0012】
また、本発明の上記鉄筋領域抽出装置において、前記第2手段は、前記画像における各ピクセルの輝度分布から各輝度の度数分布を作成し、当該度数が極大になる輝度値のうち、最小値を前記鉄筋の領域における標準輝度値とすることとしてもよい。
この構成によれば、鉄筋を含む画像は、エッジにより鉄筋、鉄筋の影、板材の背景の3つの領域に分けることができるが、3つの領域の中で、鉄筋の輝度が最も小さくなる。そこで、度数が極大になる輝度値のうち、最小値を鉄筋の領域における標準輝度値とすることにより、エッジに挟まれた領域の中から、鉄筋の領域を容易に特定することができる。
【0013】
また、本発明の上記鉄筋領域抽出装置において、前記第3手段は、前記特定した鉄筋の領域が隣接するときには、当該隣接する領域を統合し、1つの鉄筋領域として特定することとしてもよい。
この構成によれば、1つの鉄筋の領域に、エッジを境界線として隣接する領域が、鉄筋影や板材の背景ではなく、別の鉄筋の領域になっている場合(輝度の異なる2つの鉄筋部分が連続して撮影される場合)がある。このような場合に、別々の鉄筋の領域としてではなく、統合された1つの鉄筋の領域として特定することにより、その後の鉄筋の径やピッチを計算する際に非常に有用になる。
【0014】
また、本発明は、鉄筋領域抽出方法及び鉄筋領域抽出プログラムを含む。その他、本願が開示する課題及びその解決方法は、発明を実施するための形態の欄、及び図面により明らかにされる。なお、本発明は、本出願人による特願2010−211111の発明をさらに改良したものである。
【発明の効果】
【0015】
本発明によれば、簡単に精度よく鉄筋の配筋情報を取得することができる。
【図面の簡単な説明】
【0016】
【図1】配筋情報取得システム1の構成を示す図である。
【図2】携帯端末4のハードウェア構成を示す図である。
【図3】管理サーバ5のハードウェア構成を示す図である。
【図4】配筋情報取得システム1に記憶されるデータの構成を示す図であり、(a)は携帯端末4の記憶部45に記憶されるデータの構成を示し、(b)は管理サーバ5の記憶部55に記憶されるデータの構成を示す。
【図5】異形鉄筋の状態を定義する図であり、(a)はリブ位置0°の状態を示し、(b)はリブ位置90°の状態を示し、(c)はリブ位置60°の状態を示す。
【図6】携帯端末4の鉄筋規格情報452の構成例を示す図である。
【図7】鉄筋画像の撮影方法を示すフローチャートである。
【図8】携帯端末4による画像処理の第1の実施例を示すフローチャートである。
【図9】携帯端末4による鉄筋部分抽出の処理を示すフローチャートである。
【図10】携帯端末4による鉄筋径推定の処理を示すフローチャートである。
【図11】背景バーBに関する図であり、(a)は背景バーBの形状を示し、(b)はマーカの例を示す。
【図12】実際の異形鉄筋の例を示す図である。
【図13】主筋の配筋情報の取得処理を説明するための図であり、主筋及び背景バーBを撮影した画像を示す。
【図14】主筋の配筋情報の取得処理を説明するための図であり、(a)は図13の画像を−φだけ回転した画像を示し、(b)は測定原理を説明するための図を示す。
【図15】(a)は鉄筋を含む画像及び抽出されたエッジの例を示し、(b)はエッジに外接する矩形が縦長である場合を示し、(c)はエッジに外接する矩形が縦長でない場合を示す。
【図16】(a)は鉄筋の軸方向(高さ方向)における1つのピクセル位置の、横方向の輝度分布及び3つの領域の代表輝度値を示し、(b)は鉄筋の抽出結果を示す。
【図17】画像における輝度のヒストグラムを示す図であり、(a)は影の領域がある場合を示し、(b)は影の領域がない場合を示す。
【図18】携帯端末4による画像処理の第2の実施例を示すフローチャートである。
【図19】主筋及び補強筋の配筋情報の取得処理を説明するための図であり、(a)は主筋及び補強筋の間に背景バーbを斜めに挿入した状態の画像を示し、(b)は(a)の画像において背景バーBの部分だけを2値化した画像を示す。
【図20】主筋及び補強筋の配筋情報の取得処理を説明するための図であり、図19(a)の画像のうち、認識された主筋及び背景バーBを時計回りに−φだけ回転した画像を示す。
【図21】主筋及び補強筋の配筋情報の取得処理を説明するための図であり、図19(a)の画像のうち、認識された補強筋及び背景バーBを時計回りに−φだけ回転した画像を示す。
【図22】(a)は実際の鉄筋と影の画像を示し、(b)は影を鉄筋と見なしてしまうパターンを示し、(c)は鉄筋が光って細く見なしてしまうパターンを示す。
【発明を実施するための形態】
【0017】
以下、図面を参照しながら、本発明を実施するための最良の形態を説明する。本発明の実施の形態に係る配筋情報取得システムは、建設現場において、マーカ(パターン)を両端に付した背景バーを異形鉄筋の後ろに配置し、デジタルカメラを用いて両端のマーカ及びその間の異形鉄筋を撮影し、携帯端末(配筋情報取得装置)を用いて撮影画像から異形鉄筋の本数、径長及びピッチ(間隔)等の配筋情報を求め、径長の分布から各鉄筋の種類(規格、公称直径や呼び径)を推定するものである。
【0018】
特に、鉄筋を撮影する際にフラッシュを用いないものとし、鉄筋を含む撮影画像における輝度の変化値に基づいて、領域の境界線であるエッジを検出し、そのエッジに挟まれた各領域における輝度の範囲と、画像の輝度分布から計算した、鉄筋の領域における輝度値の代表値(標準値)である代表輝度値(標準輝度値)とに基づいて、鉄筋の領域を特定する。また、背景バーを鉄筋の間に挿入可能な形状にし、その背景バーを斜めに挿入することにより、主筋及びせん断補強筋(以下、簡単に「補強筋」とする)の径長等を同時に計測することができる。なお、本実施の形態では、主筋は、鉛直方向に配置されているものとし、補強筋は、水平方向に配置されているものとする。
【0019】
これによれば、鉄筋部分の誤検出率を大幅に低減することができる。また、現場で簡単に精度よく配筋情報を取得できるので、設計図面情報と比較、照合することにより、その場で出来形の正当性を判断することができる。
【0020】
≪システムの構成と概要≫
図1は、配筋情報取得システム1の構成を示す図である。配筋情報取得システム1は、建設現場におけるデジタルカメラ3及び携帯端末4と、事務所における管理サーバ5とを備える。デジタルカメラ3と、携帯端末4との間は、USB(Universal Serial Bus)ケーブル等による接続でデータの送受信が可能である。携帯端末4と、管理サーバ5との間は、無線通信等によりデータの送受信が可能である。
【0021】
デジタルカメラ3は、鉄筋を含む柱、梁、床、壁等の撮影対象部位2を撮影するものであって、画素数が例えば400万画素以上であり、オートフォーカス機能をオフにできるものが用いられる。携帯端末4は、携帯型情報処理機器であり、デジタルカメラ3から撮影したデジタル画像を取り込んで配筋情報を生成し、管理サーバ5から設計図面情報を受信し、配筋情報と、設計図面情報とを比較、照合することにより、出来形が正当か否かを判定する。なお、携帯端末4は、PC(Personal Computer)やサーバで代用してもよい。管理サーバ5は、設計図面情報や工事写真情報を記憶する記憶部55を備え、それらの情報を携帯端末4と送受信する。
【0022】
≪装置の構成≫
図2は、携帯端末4のハードウェア構成を示す図である。携帯端末4は、通信部41、表示部42、入力部43、処理部44及び記憶部45を備える。通信部41は、デジタルカメラ3や管理サーバ5とデータ通信を行う部分であり、例えば、USBポートやNIC(Network Interface Card)等によって実現される。表示部42は、処理部44からの指示によりデータを表示する部分であり、例えば、液晶ディスプレイ(LCD:Liquid Crystal Display)等によって実現される。入力部43は、オペレータがデータ(例えば、鉄筋規格情報等のデータ)を入力する部分であり、例えば、キーボードやマウス等によって実現される。処理部44は、各部間のデータの受け渡しを行うととともに、携帯端末4全体の制御を行うものであり、CPU(Central Processing Unit)が所定のメモリに格納されたプログラムを実行することによって実現される。記憶部45は、処理部44からデータを記憶したり、記憶したデータを読み出したりするものであり、例えば、フラッシュメモリやハードディスク装置等の不揮発性記憶装置によって実現される。
【0023】
図3は、管理サーバ5のハードウェア構成を示す図である。管理サーバ5は、通信部51、表示部52、入力部53、処理部54及び記憶部55を備える。通信部51は、無線ネットワークを介して携帯端末4とデータ通信を行う部分であり、例えば、NIC等によって実現される。表示部52は、処理部54からの指示によりデータを表示する部分であり、例えば、液晶ディスプレイ等によって実現される。入力部53は、オペレータがデータ(例えば、設計図面情報等のデータ)を入力する部分であり、例えば、キーボードやマウス等によって実現される。処理部54は、各部間のデータの受け渡しを行うととともに、管理サーバ5全体の制御を行うものであり、CPUが所定のメモリに格納されたプログラムを実行することによって実現される。記憶部55は、処理部54からデータを記憶したり、記憶したデータを読み出したりするものであり、例えば、フラッシュメモリやハードディスク装置等の不揮発性記憶装置によって実現される。
【0024】
≪データの構成≫
図4は、配筋情報取得システム1に記憶されるデータの構成を示す図である。図4(a)は、携帯端末4の記憶部45に記憶されるデータの構成を示す。記憶部45は、画像処理プログラム451及び鉄筋規格情報452を記憶する。画像処理プログラム451は、デジタルカメラ3で撮影された画像データから配筋情報を取得し、設計図面情報との適合性を判定する処理を行うプログラムであり、当該処理の必要に応じて処理部44の指示により記憶部45から読み出される。鉄筋規格情報(鉄筋種類情報)452は、径長の分布から鉄筋の規格(種類)を求めるために用いられるテーブル情報である。その詳細は、別途説明する。
【0025】
図4(b)は、管理サーバ5の記憶部55に記憶されるデータの構成を示す。記憶部55は、設計図面情報551及び工事写真情報552を予め記憶する。設計図面情報551は、鉄筋等、建造物の設計に係る図面情報(異形鉄筋の径長を含む)であり、管理者により記憶部55に登録され、必要に応じて管理サーバ5から携帯端末4に送信される。工事写真情報552は、実際の建設現場における建造物の写真情報であり、デジタルカメラ3で撮影された写真情報が、携帯端末4経由で管理サーバ5に送信され、記憶部55に記憶される。
【0026】
図5は、異形鉄筋の状態を定義する図である。異形鉄筋は、建物の構造用材料の一つであり、鉄製の棒を圧延して表面に凹凸を設けた棒状の鋼材である。凹凸として、図5に示すように、節(フシ)と、リブとが設けられている。鉄筋の軸線に対して垂直な方向から見た(撮影した)場合、リブの位置(角度)によって異形鉄筋の径長が異なる。以下、リブが正面に向いた状態をリブ位置0°として、3つの状態について説明する。
【0027】
図5(a)は、リブ位置0°の状態を示す。この状態のリブは、正面に位置するので、径長には影響しない。図面に向かって右側の節と、左側の節とは、軸線方向に沿って交互に設けられている。従って、異形鉄筋の径長としては、節を含まない径長d0と、1つの節を含む径長d1とが抽出される。
図5(b)は、リブ位置90°の状態を示す。この状態のリブは両端に位置し、節はリブに含まれるので、異形鉄筋の径長としては、両端のリブを含む径長d2が抽出される。
図5(c)は、リブ位置60°の状態を示す。この状態のリブは、突起の高さによっては径長に影響を与える。図面に向かって右側の節は見えるが、左側の節は見えない。従って、異形鉄筋の径長としては、節を含まない径長d3と、1つの節を含む径長d4とが抽出される。なお、図12は、実際の異形鉄筋の例を示す図である。
【0028】
図6は、携帯端末4の鉄筋規格情報452の構成例を示す図である。鉄筋規格情報452は、撮影した鉄筋画像における径長の分布からリブ位置を推定し、さらに該当する鉄筋の規格(種類)を特定するためのテーブル情報であり、呼び径4521、公称直径4522及びリブ位置4523を含むレコードから構成される。呼び径4521は、異形鉄筋の呼び径を示す。公称直径4522は、呼び径4521の異形鉄筋について一般に言われる直径(径長)を示す。リブ位置4523は、リブが正面の状態を0°とした場合のリブの位置(角度)を示すものであり、そのリブ位置4523が0〜60°、60〜75°及び75〜90°の3つの場合に対してそれぞれ径長の下限値及び上限値が示されている。なお、節やリブの形状や大きさに応じて径長の見え方が変わるので、リブ位置4523の範囲は、2つに分けてもよいし、4つ以上に分けてもよい。
【0029】
鉄筋径の推定においては、まず、径長の分布から3つのリブ位置4523のうち、1つが推定され、径長の中央値(median)を下限値及び上限値の範囲と比較、照合し、呼び径4521及び公称直径4522の鉄筋規格を特定する。その詳細は、後記する。
【0030】
≪システムの処理≫
図7は、鉄筋画像の撮影方法を示すフローチャートである。これは、建設現場において、撮影者が背景バー及びデジタルカメラ3を用いて鉄筋を撮影し、その撮影画像を携帯端末4に転送し、携帯端末4を用いて撮影画像から配筋情報を取得する手順を示すものである。
【0031】
まず、撮影者は、デジタルカメラ3を決定する(S701)。その際、400万画素以上の設定が可能であり、かつ、オートフォーカス機能を切れるものか否かを確認し(S702)、その条件が合わなければ(S702のNO)、再度デジタルカメラ3を選び直す(S701)。当該条件が合えば(S702のYES)、決定したデジタルカメラ3のオートフォーカス機能をオフにし、撮影対象部位2と、デジタルカメラ3との間の適正な距離(例えば、2m)で焦点が合うように調節する(S703)。これ以降は、焦点距離を一定とする。そして、キャリブレーションボードを撮影し、カメラパラメータを取得する(S704)。これは、カメラキャリブレーションと呼ばれるもので、格子模様や等間隔ドットを印刷した紙であるボードを撮影することにより、デジタルカメラ3の歪み等を検出するものである。
【0032】
次に、撮影者は、鉄筋を含む撮影対象部位2を決定し(S705)、その鉄筋の背後に背景バーを挿入する(S706)。背景バーを固定するために、主筋だけがある場合には、磁石等を用いることが考えられ、一方、主筋及び補強筋の両方がある場合には、入り組んだ鉄筋の間に立て掛けるだけでもよい。
【0033】
図11(a)は、背景バーBの形状を示す図である。背景バーBは、板材BA、マーカMK1及びMK2からなる。板材BAは、鉄筋を撮影する際の背景になる帯状の板材であり、少なくとも一方の面に鉄筋と異なる色(例えば、白色)が着けられる。
【0034】
板材BAの幅T1は、異形鉄筋のフシのピッチ(例えば、20mm)より大きく、かつ、補強筋の間隔(例えば、100mm)より小さく、例えば、50mmに形成される。一方、マーカMK1及びMK2は、板材BAの両端に付され、その幅T2は、補強筋の間隔(例えば、100mm)より小さく、例えば、70mm以下に形成される。
【0035】
これによれば、板材BAの幅T1がフシのピッチより大きいので、背景バーBの位置にかかわらず、背景バーBの前にいずれかのフシが必ず存在した状態で撮影できる。従って、フシの分布を把握しつつ、鉄筋の最大径長を計測できる。そのとき、幅T1が限られた大きさなので、計算時間の短縮を図れる。また、板材BAの幅T1及びマーカMK1、MK2の幅T2が補強筋のピッチより小さいので、補強筋と干渉することなく、容易に背景バーBを鉄筋内に挿入することができる。
【0036】
マーカは、自然界に存在しない特徴的な形状であり、事前にその大きさ(寸法)が分かっているものであって、マーカの大きさと、撮影した画像におけるマーカ内のピクセル数とから1ピクセル当たりの長さ(1ピクセル長)を求め、一方、2つのマーカMK1と、MK2との間をスキャンすることによりその間にある鉄筋を認識し、さらには、撮影対象部位2と、デジタルカメラ3との間の距離を推定するために用いられる。
【0037】
図11(b)は、マーカの例を示す図である。クロスマーカ及び円形マーカが示されている。背景バーBにマーカMK1、MK2を付与し、背景バーBを鉄筋の背後に設置することにより、デジタルカメラ3から同一の距離にあるマーカ及び鉄筋を撮影できるため、撮影された画像データにおいて、マーカと鉄筋との間で1ピクセル当たりの長さが等しくなるので、精度よく径長やピッチを求めることができる。
【0038】
そして、対象を適正な距離(例えば、2m)だけ離れた位置からデジタルカメラ3で撮影し(S707)、撮影画像を携帯端末4に転送し、画像処理を実行する(S708)。なお、デジタルカメラ3の撮影方向の垂直角度は約0°とし、水平角度は任意とする。携帯端末4による画像処理の詳細は、後記する。画像処理の後、携帯端末4の表示部42に計算結果が表示される(S709)。そして、その計算結果が、設計図面情報の鉄筋径、ピッチであれば(S710のYES)、配筋状態が正常であるとして、撮影作業を終了する。一方、計算結果が設計図面情報の鉄筋径、ピッチでなければ(S710のNO)、撮影者は、配筋の是正を現場の作業者に指示し(S711)、是正が実施された後、撮影対象部位2を再度決定し(S705)、撮影作業を行う。
【0039】
図8は、携帯端末4による画像処理の第1の実施例を示すフローチャートである。この処理は、携帯端末4がデジタルカメラ3から画像データを取得し、内蔵の画像メモリに格納したときに行われる。この実施例では、撮影対象部位2が主筋のみの場合の処理について説明する。
【0040】
まず、携帯端末4は、画像処理プログラムを呼び出す(S801)。具体的には、処理部54が、記憶部55から画像処理プログラム451を読み出し、主記憶装置(メインメモリ)にロードし、プログラムカウンタ(制御ポインタ)を画像処理プログラム451の開始アドレスに位置付ける。これにより、携帯端末4の処理部44が画像処理プログラム451に従って処理を開始する。その処理フローがS802〜S814に示されている。
【0041】
まず、携帯端末4(処理部44)は、デジタル画像、カメラ焦点距離FL[pixel]、マーカMK1、MK2内の基準長[mm]及びマーカ間距離M[mm]を取得する(S802)。デジタル画像は、デジタルカメラ3から、USBケーブルを経由して画像メモリ内に取得する。カメラ焦点距離FL、マーカ内基準長及びマーカ間距離Mは、撮影者の操作により入力部53を通じて取得する。なお、マーカ内基準長は、マーカMK1、MK2における基準となる長さであり、例えば、円形マーカならば、その円の直径の長さが適用される。次に、画像の補正及び二値化を行う(S803)。具体的には、S704で取得したカメラパラメータを用いてデジタル画像の歪み等を補正し、補正したデジタル画像をピクセル値=0(黒)又は1(白)の白黒画像に変換する。
【0042】
続いて、携帯端末4は、二値化された画像データから、主筋Sが垂直線となす角度及び背景バーBが水平線となす角度を測定する(S804)。図13を用いて説明すると、垂直線は、画像メモリIMにおけるピクセル配置の縦方向に平行な直線を意味し、水平線は、画像メモリIMにおけるピクセル配置の横方向に平行な直線を意味するものとする。角度は、時計回りの方向を正とする。そして、画像メモリIMにおいて縦方向に延びる、ピクセル値が0(黒)の矩形領域を主筋Sとし、その矩形の長辺に平行で、かつ、その矩形の中心を通る直線を主筋Sの中心線として抽出し、その中心線と、垂直線との間の角度をθとする。また、マーカMK1及びMK2の中心を通る直線を背景バーBの中心線として抽出し、その中心線と、水平線との間の角度をφとする。
【0043】
続いて、携帯端末4は、元の画像を時計回りに−φだけ回転し、背景バーBを水平線と平行にする(S805)。図14(a)は、図13の画像を−φだけ回転したものであり、背景バーBの中心線が水平線と平行になっている。
【0044】
次に、鉄筋部分の画像を抽出する(S806)。図14(b)の上方には、背景バーBの、マーカ及び鉄筋部分を抽出した画像が示されている。そして、マーカMK1、MK2の、背景バーBに沿った最大ピクセル数をカウントする(S807)。具体的には、マーカである円形の直径のうち、最大の直径を特定し、その径長に含まれるピクセル数をカウントする。そして、マーカ内基準長をピクセル数で除することにより、1ピクセル当たりの長さが求められる。これによれば、円形のマーカを用いることにより、どの方向からマーカを見ても最大直径が一定になるので、マーカの向きが変わっても精度よく1ピクセル当たりの長さを特定することができる。さらに、カメラからの距離Lm1、Lm2、LHを求める。(S808)。図14(b)に示すように、距離Lm1は、カメラと、マーカMK1との間の距離である。距離Lm2は、カメラと、マーカMK2との間の距離である。距離LHは、カメラと、背景バーBとの間の最短距離であり、カメラと、各鉄筋との間の距離を計算する際に用いられる。各距離は、以下の式1、2、3によって求められる。
Lm1=FL×(マーカMK1の基準長/マーカMK1のピクセル数)・・・式1
Lm2=FL×(マーカMK2の基準長/マーカMK2のピクセル数)・・・式2
LH=√(Lm12−(Lm12−Lm22+M2)2/4M2) ・・・式3
【0045】
さらに、携帯端末4は、各主筋の径を推定する(S809)。主筋の径長を推定することによって、鉄筋としての種類を特定する。この処理の詳細は、サブルーチンの処理として別途説明する。
【0046】
次に、携帯端末4は、デジタルカメラ3の座標(位置)、姿勢及び設計図面情報を取得する(S810)。デジタルカメラ3の座標は、例えば、GPS(Global Positioning System)機器を接続することにより、撮影画像に付与される位置情報として取得する。デジタルカメラ3の姿勢は、撮影時のカメラ姿勢を検知する機能(デジタルカメラ3又は接続機器の機能)により取得する。設計図面情報は、携帯端末4が、管理サーバ5の記憶部55に記憶された設計図面情報551を受信することにより、取得する。そして、撮影された画像の対象部位(工事箇所)を特定し、該当する設計図面情報との適合性を判定する(S811)。例えば、推定した異形鉄筋の径長と、設計図面情報に含まれる異形鉄筋の径長との適合性を判定する。
【0047】
図面通りできていれば(S812のYES)、携帯端末4は、設計図面情報及び認識情報を表示部42に出力する(S813)。設計図面情報は、図面上の鉄筋の対象部位、座標、本数、ピッチ、径長等である。認識情報は、実際の鉄筋の本数、ピッチ及び径長である。図面通りできていなければ(S812のNO)、異常内容を示す配筋異常情報、設計図面情報及び認識情報を表示部42に出力する(S814)。なお、適合性の判定結果を表示部42に出力するのではなく、通信部41を通じて他の装置に送信することも可能である。
【0048】
図9は、携帯端末4による鉄筋部分抽出の処理を示すフローチャートである。これは、画像処理プログラムのうち、鉄筋部分の抽出サブルーチンの処理であり、背景バーの部分の画像からエッジ(領域の境界線)を抽出し、2つのエッジで挟まれた各部分が3つの領域のいずれかを判別することにより、それらの領域の1つとして鉄筋部分を特定するものである。
【0049】
まず、携帯端末4は、背景バーBの部分に相当する画像全体を2値化して、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。このとき、切り出された画像は、2値化されていないものとする。図15(a)の上図は、切り出された画像の例を示す。
【0050】
そして、携帯端末4は、切り出された画像からエッジを抽出する(S903)。エッジとは、画像における3つの領域(鉄筋、影、背景)の境界線である。例えば、画像の、鉄筋の軸方向に対して垂直に並んだピクセルの輝度をスキャンしたときに、その輝度が不連続になる(急激に変化する)箇所がエッジになる。そこで、例えば、スキャン方向に隣接するピクセルの輝度をラプラシアン(2次微分)フィルター処理して、その演算値の絶対値が所定値以上の箇所(詳細には、例えば、隣接する2つのピクセルの中間)を検出し、各検出箇所を連結した線をエッジとして抽出する。ピクセルの輝度をスキャンすべき方向は、例えば、図11(a)に示す、背景バーBの画像においてマーカMK1及びMK2を検出したときに、マーカMK1からMK2への方向(背景バーBの長手方向)である。図15(a)の下図は、抽出されたエッジの例を示す。なお、輝度が不連続な箇所を検出する際に、1次微分フィルター処理を用いることもできる。
【0051】
続いて、携帯端末4は、抽出されたエッジのうち、不要なエッジを除去する(S904)。例えば、鉄筋の軸方向を縦方向とし、各エッジに対して外接する矩形を描いて、その矩形の縦幅及び縦横比を計算する。そして、描いた矩形の縦幅が背景バーBの幅と同等であり、かつ、図15(b)に示すように、その矩形が縦長(縦横比>α)であるエッジを残す。一方、矩形の縦幅が背景バーBの幅より小さい場合、又は、図15(c)に示すように、矩形が縦長でない(縦横比≦α)、すなわち、正方形か、横長である場合には、当該エッジを除外する。なお、縦長か否かを判定するための縦横比の閾値αは、1以上の所定値である。
【0052】
次に、携帯端末4は、各エッジ間の部分を3つの領域(鉄筋、影、背景)に分ける(S905)。例えば、図16(a)のAで示される、鉄筋の軸方向に垂直な方向での輝度分布が得られたとする。この輝度分布は、背景の左側から右側へピクセルの輝度をスキャンしたものである。その画像全体に含まれるピクセルの輝度分布に対してヒストグラム(度数分布)を作成し、極大値(度数が極大になる輝度値)のラベリングを行う。そして、ラベリングした極大値から、各領域の代表輝度値及び中間輝度値を計算する。
【0053】
以下では、画像の輝度分布に基づいて3つの領域の代表輝度値を計算し、その代表輝度値に基づいて、エッジに挟まれた部分がいずれの領域であるかを特定する手順を説明する。
【0054】
図17は、画像輝度のヒストグラムを示す図であり、横軸は輝度、縦軸は度数を示す。図17(a)は、影の領域がある場合を示す。6個の極大値があり、輝度の小さい方から順にmin1、min2、・・・とラベリングされ、一方、輝度の大きい方から順にmax1、max2、・・・とラベリングされる。そして、極大値max1は、輝度が最大の極大値であり、背景の代表輝度値Bになる。極大値min1は、輝度が最小の極大値であり、鉄筋の代表輝度値Cになる。また、極大値max1及び極大値max2の中間輝度値を極大値mid_maxとする。次に、極大値min1及び極大値min2の中間輝度値を極大値mid_minとする。このとき、極大値mid_max及び極大値mid_minの中間輝度値は、影の代表輝度値Dになる。
【0055】
図17(b)は、影の領域がない場合を示す。影の領域がない場合には、鉄筋の次にすぐ背景が来ることになる。2個の極大値があり、輝度の小さい方が極大値min1とラベリングされ、一方、輝度の大きい方が極大値max1とラベリングされる。そして、極大値max1は、背景の代表輝度値Bになる。極大値min1は、鉄筋の代表輝度値Cになる。極大値が2つしかない場合に、影の領域はないと考えられる。
【0056】
図17(a)のヒストグラムから、図16(a)に示すように、背景の代表輝度値B、鉄筋の代表輝度値C及び影の代表輝度値Dが特定される。そこで、エッジ間の領域を、代表輝度値に基づいて鉄筋、影、背景のいずれかに特定する。詳細には、エッジに挟まれる各領域での輝度の範囲が決まるので、その範囲に代表輝度値B、C、Dのいずれが含まれるかに応じて、背景、鉄筋、影のいずれかを領域として特定する。例えば、Eの領域の輝度範囲は代表輝度値Cを含むので、鉄筋部分であることが分かる。
【0057】
さらに、携帯端末4は、特定した領域のうち、隣り合う領域が同じである場合、領域を統合する(S906)。例えば、3つのエッジがあった場合、エッジで挟まれた、2つの領域が形成されるが、その2つの領域がともに鉄筋であれば、中央のエッジをなくし、両端のエッジで挟まれた領域を1つの鉄筋領域とする。
【0058】
以上の処理の結果、図16(b)に示すように、鉄筋が抽出される。なお、図16(b)にはないが、鉄筋及び影の次に、背景ではなく、鉄筋が来る(すなわち、鉄筋、影、鉄筋となる)こともある。
【0059】
図10は、携帯端末4による鉄筋径推定の処理を示すフローチャートである。これは、画像処理プログラムのうち、主筋及び補強筋を含む鉄筋径の推定サブルーチンの処理であり、二値化した画像データから、各鉄筋の連続的な径長を抽出し、その径長データを整形してデータの個数及び最頻値を求め、最頻値を個数で除した値(径長データのばらつきの指標値)に応じて鉄筋の規格を特定するものである。
【0060】
まず、携帯端末4は、背景バーBに対して垂直方向の1pixelずつの位置に対応する連続的な径長[mm]を抽出する(S1001)。図14(b)で説明すると、まず、背景バーBに対して垂直方向の所定位置においてマーカMK1からMK2へ、ピクセル値が0(黒)のピクセルをサーチし、鉄筋径の背景バーBに沿ったピクセル数Wpを求める。そのとき、鉄筋、マーカ間の背景バーBに沿ったピクセル数Pも求める。ここで、鉄筋間のピクセル数、すなわち、配筋ピッチは、隣り合う鉄筋の中心軸間の間隔を示すものであり、例えば、左側エッジ間ピクセル数及び右側エッジ間ピクセル数の平均値として算出される。
【0061】
続いて、鉄筋、マーカ間の背景バーBに沿った距離mを求め、カメラから各鉄筋までの距離Ltを求め、各鉄筋径Wm及び鉄筋ピッチm’を求める。例えば、図14(b)の鉄筋2に関しては、以下の式4、5、6、7で求められる。なお、式6及び式7は、主筋に関する計算式である。補強筋に関しては、後記する。
m2=M×P2/ΣPn (ΣPn:n=1〜6) ・・・式4
Lt2=√(LH2+m22) ・・・式5
Wm2=WP2×Lt2/FL×cos(φ+θ) ・・・式6
m2’=m2×cos(φ+θ) ・・・式7
Lt1を求めるときには、式4のP2をP1+P2に置き換える。Lt3を求めるときには、式4のP2をP3に置き換える。Lt4を求めるときには、式4のP2をP3+P4に置き換える。
【0062】
次に、携帯端末4は、データの整形として、背景バーBに対して垂直方向に、背景バーBの中心線から、例えば、±500pixelの位置に対応する径長を抜き出す(S1002)。そして、抜き出した1000個の径長の中央値Mを取得する(S1003)。この場合、中央値Mは、500番目の径長と、501番目の径長との平均値になる。さらに、データの整形として、1000個の径長データのうち、0.8M〜1.2Mに該当するデータを抜き出す(S1004)。そして、抜き出した径長データの個数Nを取得する(S1005)。さらに、データの整形として、N×0.01個未満のデータを削除する(S1006)。これによれば、径長データの個数Nの1%に満たない個数のデータを除外するので、測定誤差等によって生じる、極端に大きい、又は、極端に小さい径長データ等を排除することができる。その後、整形終了後のデータ個数Ni及び最頻値Ymaxを取得する(S1007)。
【0063】
そこで、Ymax/Niの値を求め、その値に応じて鉄筋の状態(リブ位置)を推定する。これは、異形鉄筋には節及びリブが設けられているため、鉄筋の向きによって節及びリブの見え方が変わり、抽出される径長データの分布も変わるので、逆に径長データのばらつきの指標値から鉄筋の向きを推定するものである。
【0064】
まず、Ymax/Niの値が0.35未満の場合(S1008のYES)、鉄筋の状態(リブ位置)が0°〜60°であり(S1009)、データ整形後の中央値Miを取得し(S1010)、記憶部45の鉄筋規格情報452(図6参照)におけるリブ位置4523のうち、0〜60の欄を参照する(S1011)。Ymax/Niの値が0.35以上、かつ、0.45未満の場合(S1012のYES)、鉄筋の状態(リブ位置)が60°〜75°であり(S1013)、データ整形後の中央値Miを取得し(S1014)、記憶部45の鉄筋規格情報452におけるリブ位置4523のうち、60〜75の欄を参照する(S1015)。Ymax/Niの値が0.45以上の場合(S1012のNO)、鉄筋の状態(リブ位置)が75°〜90°であり(S1016)、データ整形後の中央値Miを取得し(S1017)、記憶部45の鉄筋規格情報452におけるリブ位置4523のうち、75〜90の欄を参照する(S1018)。
【0065】
鉄筋規格情報452を参照した結果、中央値Miに対応する鉄筋規格(呼び径4521及び公称直径4522)が存在するか否かを判定する(S1019)。具体的には、中央値Miを含む径長の下限値と上限値の組合せが各欄にあるか否かを判定する。存在すれば(S1019のYES)、該当した鉄筋規格を取得する。存在しなければ(S1019のNO)、計測が失敗したことになる(S1021)。これによれば、鉄筋のリブ位置(向き)に対応した鉄筋規格情報452を用いるので、どの角度から撮影したとしても、精度よく鉄筋規格を取得することができる。
【0066】
≪主筋及び補強筋が混在する場合の処理≫
図18は、携帯端末4による画像処理の第2の実施例を示すフローチャートであり、図8のフローチャートにS1805、S1811〜S1815の処理を追加したものである。この実施例では、撮影対象部位2において主筋及び補強筋が混在している場合に、主筋と、補強筋とを判別し、それぞれの配筋情報を取得する処理について説明する。
【0067】
まず、携帯端末4は、図8のS801〜S804の処理と同様に、画像処理プログラムを呼び出し、デジタル画像や焦点距離等を取得し、画像の二値化を行い、主筋Sが垂直線となす角度θを測定する(S1801〜S1804)。続いて、S1803で二値化した画像データを時計回りに−θだけ回転し、主筋Sの中心線が垂直線と平行になるようにし、背景バーBの部分だけを対象として抽出した、ピクセル値が0(黒)の領域について、主筋か、補強筋かを判別する(S1805)。このとき、黒の領域の個数により鉄筋の本数が分かる。
【0068】
図19〜図21は、主筋及び補強筋が混在したときの処理を説明するための図である。図19(a)は、主筋及び補強筋の間に背景バーBを斜めに挿入した状態の画像を示し、主筋と補強筋とのなす角度が90°であり、主筋Sの中心線が垂直線と平行であり、背景バーBの中心線と水平線とのなす角度がφである。次に、図19(b)は、図19(a)の画像において背景バーBの部分だけを抽出した画像を示す。その画像の、ピクセル値が0(黒)の領域について、中心線と水平線とのなす角度が90°の箇所が主筋と認識され、Wspi(i=1〜5)が主筋の径長となる。一方、中心線と水平線とのなす角度が0°の箇所が補強筋と認識され、Whpj(j=1、2)が補強筋の径長となる。
【0069】
次に、携帯端末4は、背景バーBの中心線が水平線と平行になるように、主筋及び背景バーBを−φ回転する(S1806)。図20は、図19(a)の画像のうち、認識された主筋及び背景バーBを時計回りに−φだけ回転した画像を示す。そして、背景バーBの部分だけの画像を抽出する(S1807)と、図14(b)の上方に示すような、マーカ及び主筋の画像になるので、図8のS807〜S809の処理と同様に、各主筋の径長及びピッチを計算する(S1808〜S1810)。詳細には、式1〜7により計算するが、式6及び式7において、cos(φ+θ)の代わりにcosφを用いる。
【0070】
続いて、携帯端末4は、背景バーBの中心線が水平線と平行になるように、補強筋及び背景バーBを−φ回転する(S1811)。図21は、図19(a)の画像のうち、認識された補強筋及び背景バーBを時計回りに−φだけ回転した画像を示す。そして、背景バーBの部分だけの画像を抽出する(S1812)と、図14(b)の上方に示すような、マーカ及び補強筋の画像になるので、図8のS807〜S809の処理と同様に、各補強筋の径長及びピッチを計算する(S1813〜S1815)。詳細には、式1〜7により計算するが、式6及び式7において、cos(φ+θ)の代わりにsinφを用いる。
【0071】
さらに、携帯端末4は、図8のS810〜S814の処理と同様に、計算した配筋情報が設計図面情報の通りか否かを判断し、その結果に応じた情報を出力する(S1816〜S1820)。
【0072】
以上本発明の実施の形態について説明したが、図1に示す配筋情報取得システム1の各装置を機能させるために、各装置の処理部で実行されるプログラムをコンピュータにより読み取り可能な記録媒体に記録し、その記録したプログラムをコンピュータに読み込ませ、実行させることにより、本発明の実施の形態に係る配筋情報取得システム1が実現されるものとする。なお、プログラムをインターネット等のネットワーク経由でコンピュータに提供してもよいし、プログラムが書き込まれた半導体チップ等をコンピュータに組み込んでもよい。
【0073】
以上説明した本発明の実施の形態によれば、まず、マーカMK1及びMK2と、白い板材BAとを一体化した背景バーBを鉄筋内に挿入すればよいので、対象鉄筋に直接貼付するマーカや目盛り付きの定規が不要になり、撮影する前にセットするものが少なくて済む。次に、1つの背景バーBを用いることにより、主筋及び補強筋の両方の配筋情報を簡便に取得することが可能である。
【0074】
そして、フラッシュを用いることなく、撮影した画像において、輝度の不連続箇所を検出することにより、エッジを抽出するとともに、輝度分布から計算した代表輝度値に基づいて、エッジに挟まれた領域から鉄筋の領域を抽出するので、鉄筋部分の誤検出率を大幅に低減することができる。そして、影の部分を抽出することにより、さらに誤検出をなくすことができる。また、2値化パラメータ修正等の微調整は不要になり、簡単なプログラムにより鉄筋部分を抽出することができる。
【0075】
≪その他の実施の形態≫
以上、本発明を実施するための最良の形態について説明したが、上記実施の形態は本発明の理解を容易にするためのものであり、本発明を限定して解釈するためのものではない。本発明はその趣旨を逸脱することなく変更、改良され得るとともに、本発明にはその等価物も含まれる。例えば、以下のような実施の形態が考えられる。
【0076】
(1)上記実施の形態においては、図10のS1003で1000個の径長データから中央値を取得するものとしたが、他の代表値(例えば、最頻値等)を取得するようにしてもよい。
【0077】
(2)マーカは円形に限らず、例えば、正面から見たときに四角形のものであってもよい。また、マーカは、板材BAの両端に2つ設けられるのに限らず、板材BAの長手方向に所定の間隔をおいて3つ以上設けられてもよい。このとき、配筋情報を取得する必要のある鉄筋を選択し、複数のマーカから、選択した鉄筋を挟む位置にある2つのマーカを特定し、その2つのマーカを用いることが考えられる。
【0078】
(3)主筋Sが垂直線となす角度及び背景バーBが水平線となす角度を測定し、それらの角度を用いるものとしたが、垂直線や水平線に限らず、画像メモリIMにおけるピクセル配置の縦方向又は横方向に対する角度が確定していれば、他の基準線を使ってもよく、また、主筋S及び背景バーBそれぞれに対する2つの基準線に限らず、1つの基準線を使ってもよい。
【0079】
(4)上記実施形態においては、例えば図14(b)に示すように、カメラと背景バーとが正対(カメラの光軸と背景バーとが直交)していることを前提として説明したが、カメラと鉄筋及び背景バーとが正対しておらず、例えば、背景バーがカメラに対して奥行方法に傾斜している場合にも上記実施形態と同じ式1〜7により鉄筋の径長等を計測することが可能である。
【符号の説明】
【0080】
1 配筋情報取得システム
2 撮影対象部位
3 デジタルカメラ
4 携帯端末(配筋情報取得装置、情報処理装置)
44 処理部
45 記憶部
451 鉄筋規格情報(鉄筋種類情報)
5 管理サーバ
B 背景バー(鉄筋撮影用具)
BA 板材
FL 焦点距離
Lm、LH、Lt カメラからの距離
MK1、MK2 マーカ(パターン)
Wp ピクセル数
【特許請求の範囲】
【請求項1】
鉄筋を撮影した画像から、鉄筋の領域を抽出する鉄筋領域抽出装置であって、
前記画像において、前記鉄筋の軸方向に対して垂直に並んだピクセルの輝度をスキャンし、隣接するピクセル間で輝度が不連続になる箇所を連結して、領域の境界線であるエッジを抽出する第1手段と、
前記画像における各ピクセルの輝度分布に基づいて、鉄筋の領域における輝度値の標準値である標準輝度値を計算する第2手段と、
前記抽出したエッジに挟まれた各領域における輝度の範囲が、前記計算した標準輝度値を含む場合に、当該領域を鉄筋の領域として特定する第3手段と、
を備えることを特徴とする鉄筋領域抽出装置。
【請求項2】
請求項1に記載の鉄筋領域抽出装置であって、
前記画像は、前記鉄筋の軸方向に対して垂直な方向に所定の間隔をおいて設けられた複数のパターンを含み、
前記第1手段は、前記ピクセルの輝度を、前記パターンに基づく方向にスキャンする
ことを特徴とする鉄筋領域抽出装置。
【請求項3】
請求項1に記載の鉄筋領域抽出装置であって、
前記第1手段は、前記隣接するピクセルの輝度に対して微分演算を行い、当該演算値に基づいて、当該輝度が不連続になるピクセルを検出する
ことを特徴とする鉄筋領域抽出装置。
【請求項4】
請求項1に記載の鉄筋領域抽出装置であって、
前記第1手段は、前記鉄筋の軸方向を縦方向とし、前記抽出した各エッジのうち、その縦幅が背景バーの幅と同等であり、かつ、その縦横比が所定値より大きいエッジを、前記第3手段の処理対象とする
ことを特徴とする鉄筋領域抽出装置。
【請求項5】
請求項1に記載の鉄筋領域抽出装置であって、
前記第2手段は、前記画像における各ピクセルの輝度分布から各輝度の度数分布を作成し、当該度数が極大になる輝度値のうち、最小値を前記鉄筋の領域における標準輝度値とする
ことを特徴とする鉄筋領域抽出装置。
【請求項6】
請求項1に記載の鉄筋領域抽出装置であって、
前記第3手段は、前記特定した鉄筋の領域が隣接するときには、当該隣接する領域を統合し、1つの鉄筋領域として特定する
ことを特徴とする鉄筋領域抽出装置。
【請求項7】
情報処理装置により、鉄筋を撮影した画像から、鉄筋の領域を抽出する鉄筋領域抽出方法であって、
前記情報処理装置は、
前記画像において、前記鉄筋の軸方向に対して垂直に並んだピクセルの輝度をスキャンし、隣接するピクセル間で輝度が不連続になる箇所を連結して、領域の境界線であるエッジを抽出する第1ステップと、
前記画像における各ピクセルの輝度分布に基づいて、鉄筋の領域における輝度値の標準値である標準輝度値を計算する第2ステップと、
前記抽出したエッジに挟まれた各領域における輝度の範囲が、前記計算した標準輝度値を含む場合に、当該領域を鉄筋の領域として特定する第3ステップと、
を実行することを特徴とする鉄筋領域抽出方法。
【請求項8】
情報処理装置に、鉄筋を撮影した画像から、鉄筋の領域を抽出する方法を実行させるための鉄筋領域抽出プログラムであって、
前記画像において、前記鉄筋の軸方向に対して垂直に並んだピクセルの輝度をスキャンし、隣接するピクセル間で輝度が不連続になる箇所を連結して、領域の境界線であるエッジを抽出する第1ステップと、
前記画像における各ピクセルの輝度分布に基づいて、鉄筋の領域における輝度値の標準値である標準輝度値を計算する第2ステップと、
前記抽出したエッジに挟まれた各領域における輝度の範囲が、前記計算した標準輝度値を含む場合に、当該領域を鉄筋の領域として特定する第3ステップと、
を含むことを特徴とする鉄筋領域抽出プログラム。
【請求項1】
鉄筋を撮影した画像から、鉄筋の領域を抽出する鉄筋領域抽出装置であって、
前記画像において、前記鉄筋の軸方向に対して垂直に並んだピクセルの輝度をスキャンし、隣接するピクセル間で輝度が不連続になる箇所を連結して、領域の境界線であるエッジを抽出する第1手段と、
前記画像における各ピクセルの輝度分布に基づいて、鉄筋の領域における輝度値の標準値である標準輝度値を計算する第2手段と、
前記抽出したエッジに挟まれた各領域における輝度の範囲が、前記計算した標準輝度値を含む場合に、当該領域を鉄筋の領域として特定する第3手段と、
を備えることを特徴とする鉄筋領域抽出装置。
【請求項2】
請求項1に記載の鉄筋領域抽出装置であって、
前記画像は、前記鉄筋の軸方向に対して垂直な方向に所定の間隔をおいて設けられた複数のパターンを含み、
前記第1手段は、前記ピクセルの輝度を、前記パターンに基づく方向にスキャンする
ことを特徴とする鉄筋領域抽出装置。
【請求項3】
請求項1に記載の鉄筋領域抽出装置であって、
前記第1手段は、前記隣接するピクセルの輝度に対して微分演算を行い、当該演算値に基づいて、当該輝度が不連続になるピクセルを検出する
ことを特徴とする鉄筋領域抽出装置。
【請求項4】
請求項1に記載の鉄筋領域抽出装置であって、
前記第1手段は、前記鉄筋の軸方向を縦方向とし、前記抽出した各エッジのうち、その縦幅が背景バーの幅と同等であり、かつ、その縦横比が所定値より大きいエッジを、前記第3手段の処理対象とする
ことを特徴とする鉄筋領域抽出装置。
【請求項5】
請求項1に記載の鉄筋領域抽出装置であって、
前記第2手段は、前記画像における各ピクセルの輝度分布から各輝度の度数分布を作成し、当該度数が極大になる輝度値のうち、最小値を前記鉄筋の領域における標準輝度値とする
ことを特徴とする鉄筋領域抽出装置。
【請求項6】
請求項1に記載の鉄筋領域抽出装置であって、
前記第3手段は、前記特定した鉄筋の領域が隣接するときには、当該隣接する領域を統合し、1つの鉄筋領域として特定する
ことを特徴とする鉄筋領域抽出装置。
【請求項7】
情報処理装置により、鉄筋を撮影した画像から、鉄筋の領域を抽出する鉄筋領域抽出方法であって、
前記情報処理装置は、
前記画像において、前記鉄筋の軸方向に対して垂直に並んだピクセルの輝度をスキャンし、隣接するピクセル間で輝度が不連続になる箇所を連結して、領域の境界線であるエッジを抽出する第1ステップと、
前記画像における各ピクセルの輝度分布に基づいて、鉄筋の領域における輝度値の標準値である標準輝度値を計算する第2ステップと、
前記抽出したエッジに挟まれた各領域における輝度の範囲が、前記計算した標準輝度値を含む場合に、当該領域を鉄筋の領域として特定する第3ステップと、
を実行することを特徴とする鉄筋領域抽出方法。
【請求項8】
情報処理装置に、鉄筋を撮影した画像から、鉄筋の領域を抽出する方法を実行させるための鉄筋領域抽出プログラムであって、
前記画像において、前記鉄筋の軸方向に対して垂直に並んだピクセルの輝度をスキャンし、隣接するピクセル間で輝度が不連続になる箇所を連結して、領域の境界線であるエッジを抽出する第1ステップと、
前記画像における各ピクセルの輝度分布に基づいて、鉄筋の領域における輝度値の標準値である標準輝度値を計算する第2ステップと、
前記抽出したエッジに挟まれた各領域における輝度の範囲が、前記計算した標準輝度値を含む場合に、当該領域を鉄筋の領域として特定する第3ステップと、
を含むことを特徴とする鉄筋領域抽出プログラム。
【図2】


【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図18】
【図1】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図19】
【図20】
【図21】
【図22】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図18】
【図1】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2013−15452(P2013−15452A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−149332(P2011−149332)
【出願日】平成23年7月5日(2011.7.5)
【出願人】(000000549)株式会社大林組 (1,758)
【出願人】(504454060)株式会社アプライド・ビジョン・システムズ (11)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月5日(2011.7.5)
【出願人】(000000549)株式会社大林組 (1,758)
【出願人】(504454060)株式会社アプライド・ビジョン・システムズ (11)
【Fターム(参考)】
[ Back to top ]