
鉄道車両の位置検出装置および位置検出方法
【課題】駅構内のように分岐線の間隔が狭くしかもGPS計測機の精度が低い場合でも、どの分岐線に入ったかを精度良く検出し得る鉄道車両の位置検出装置を提供する。
【解決手段】GPS計測機33で求められた車両Hの概略位置を入力すると共に移動距離を算出する距離算出部21と、データ取得部22で取得された車両Hの角速度ω及び角加速度ω´を入力して進行方向をファジィ推論により推定する進行方向推定部23と、距離算出部21からの移動距離及びGPS計測機33からの概略位置を入力し且つ進行方向推定部23から進行方向を入力して分岐点を推定する分岐点推定部25と、この推定分岐点、車両Hの角速度及び速度を入力してニューラルネット手法により車両Hが走行している分岐線番を検出する分岐線番検出部26と、この検出された分岐番線及び推定分岐点を入力し予め備えられた線路情報に合致するか否かを照合する分岐点照合部27とを具備したもの。
【解決手段】GPS計測機33で求められた車両Hの概略位置を入力すると共に移動距離を算出する距離算出部21と、データ取得部22で取得された車両Hの角速度ω及び角加速度ω´を入力して進行方向をファジィ推論により推定する進行方向推定部23と、距離算出部21からの移動距離及びGPS計測機33からの概略位置を入力し且つ進行方向推定部23から進行方向を入力して分岐点を推定する分岐点推定部25と、この推定分岐点、車両Hの角速度及び速度を入力してニューラルネット手法により車両Hが走行している分岐線番を検出する分岐線番検出部26と、この検出された分岐番線及び推定分岐点を入力し予め備えられた線路情報に合致するか否かを照合する分岐点照合部27とを具備したもの。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、鉄道車両の位置検出装置および位置検出方法に関する。
【背景技術】
【0002】
従来、レールなどの点検を行うための鉄道車両、例えば線路の保全を行う保全車両の安全を図るために、保全車両の位置が検出されており、例えばその位置検出に際しては、GPS衛星からの測位データが用いられている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−17240号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、GPS衛星からの測位データにより保全車両の位置を特定しようとすると、精度が高くなく且つ駅構内で線路が多数分岐している場合には、線路同士の間隔が狭いため、どの分岐線に移動したかを特定するのが難しいという問題がある。
【0005】
また、保全車両がトンネルなどに入った場合には電波が届かないため、トンネル内またはトンネル出口の直ぐ近くに分岐器がある場合には、やはり、どの分岐線に移動したかを正確に特定することができないという問題がある。
【0006】
そこで、本発明は、例えば駅構内のように分岐線の間隔が狭くしかもGPS計測機の精度が低い場合、またはトンネル内のようにGPS衛星からの測位データを利用し得ない場合でも、どの分岐線に入ったかを精度良く検出し得る鉄道車両の位置検出装置および位置検出方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の鉄道車両の位置検出装置は、鉄道車両の位置を検出する装置であって、
鉄道車両の概略位置を検出し得るGPS計測機と、鉄道車両の速度を検出する速度検出器と、鉄道車両に設けられて当該鉄道車両の進行方向での角速度を検出する角速度検出器と、上記速度検出器で検出された速度を入力して移動距離を算出するとともに当該移動距離および上記GPS計測機により得られた移動開始位置に基づき地図上での鉄道車両の概略位置を算出し得る距離算出部と、上記角速度検出器で検出された角速度を入力して鉄道車両の進行方向での角加速度を求めるデータ取得部と、このデータ取得部からの角加速度および鉄道車両の角速度を用いてその進行方向をファジィ推論により推定する進行方向推定部と、上記距離算出部で算出された移動距離および概略位置を入力するとともに分岐信頼度曲線に基づき分岐点を推定する分岐点推定部と、この分岐点推定部で求められた推定分岐点並びに鉄道車両の角速度および速度を入力してニューラルネット手法を用いて鉄道車両が走行している分岐線番を検出する分岐線番検出部と、上記分岐点推定部で求められた推定分岐点および上記分岐線番検出部で求められた分岐線番を入力して予め備えられた線路情報に合致するか否かを照合する分岐点照合部とを具備したものである。
【0008】
また、請求項2に記載の鉄道車両の位置検出装置は、請求項1に記載の位置検出装置の進行方向推定部において、角速度および角加速度に基づくファジィルールを用いて、鉄道車両の進行方向を、左方向、右方向および直進のいずれかを推定するようにしたものである。
【0009】
また、請求項3に記載の鉄道車両の位置検出装置は、請求項1または2に記載の位置検出装置の分岐線番検出部を、
推定分岐点、角速度検出器からの角速度、および速度検出器からの速度が入力されて鉄道車両の位置データである走行曲線を取得する位置データ取得部と、この位置データ取得部で取得された走行曲線を進行方向距離にて正規化する進行方向距離正規化部と、上記走行曲線を幅方向距離にて正規化する幅方向距離正規化部と、上記進行方向距離正規化部で正規化された正規化曲線データを入力してニューラルネット手法を用いて振分け率を算出する振分け率算出部と、この振分け率算出部にて求められた振分け率を入力して予め入力されている基準振分け率と比較して最も近い基準振分け率を選択することにより分岐器の振分け率を決定する振分け率決定部と、上記幅方向距離正規化部で正規化された正規化曲線データを入力してニューラルネット手法を用いて番数を算出する番数算出部と、この番数算出部にて求められた番数を入力して予め入力されている基準番数と比較して最も近い基準番数を選択することにより分岐器の番数を決定する番数決定部と、上記各決定部で決定された振分け率および番数を入力するとともに予め入力されている分岐器情報の中から当該振分け率および番数に該当する分岐器における分岐線番を判別する分岐線番判別部とから構成したものである。
【0010】
さらに、請求項4に記載の鉄道車両の位置検出方法は、鉄道車両の概略位置を検出し得るGPS計測機と、鉄道車両の速度を検出する速度検出器と、鉄道車両に設けられて当該鉄道車両の進行方向での角速度を検出する角速度検出器とが具備された鉄道車両の位置を検出する方法であって、
上記速度検出器で検出された速度を入力して移動距離を算出するとともに当該移動距離および上記GPS計測機により得られた移動開始位置に基づき地図上での鉄道車両の概略位置を算出し得る距離算出工程と、上記角速度検出器で検出された角速度を入力して鉄道車両の進行方向での角加速度を求めるデータ取得工程と、このデータ取得工程からの角加速度および鉄道車両の角速度を用いてその進行方向をファジィ推論により推定する進行方向推定工程と、上記距離算出工程で算出された移動距離および概略位置を入力するとともに分岐信頼度曲線に基づき分岐点を推定する分岐点推定工程と、この分岐点推定行程で求められた推定分岐点並びに鉄道車両の角速度および速度を入力してニューラルネット手法を用いて鉄道車両が走行している分岐線番を検出する分岐線番検出工程と、上記分岐点推定工程で求められた推定分岐点および上記分岐線番検出工程で検出された分岐線番を入力して予め備えられた線路情報に合致するか否かを照合する分岐点照合工程とを具備した方法である。
【0011】
また、請求項5に記載の鉄道車両の位置検出方法は、請求項4に記載の位置検出方法の進行方向推定工程において、角速度および角加速度に基づくファジィルールを用いて、鉄道車両の進行方向を、左方向、右方向および直進のいずれかを推定する方法である。
【0012】
さらに、請求項6に記載の鉄道車両の位置検出方法は、請求項4または5に記載の位置検出方法の分岐線番推定工程において、
推定分岐点、鉄道車両の角速度および速度が入力されて鉄道車両の位置データである走行曲線を取得し、この取得された走行曲線を進行方向距離および幅方向距離にて正規化し、これら正規化された正規化曲線データを入力してニューラルネット手法を用いて振分け率および番数を算出し、これら求められた振分け率および番数を入力して予め入力されている基準振分け率および基準番数と比較して最も近い基準振分け率および基準番数を選択することにより分岐器の振分け率および番数を決定し、これら決定された振分け率および番数に基づき、予め入力されている分岐器情報の中から当該振分け率および番数に該当する分岐器における分岐線番を判別する方法である。
【発明の効果】
【0013】
上記位置検出装置および位置検出方法によると、鉄道車両が本線から分岐線に分岐した場合には、距離算出部にて得られる鉄道車両の移動距離およびGPS測位データにより概略位置が分かり、また鉄道車両の角速度および角加速度に基づくファジィルールによりその進行方向が推定されるとともに分岐点についても推定され、そしてこの推定分岐点が分岐線番検出部に入力され、ここで、ニューラルネット手法により、分岐器の特徴である振分け率および番数が求められて正確な分岐線番が検出される。すなわち、従来のように、GPS測位データを用いて現在走行している線路を特定するシステムに比べて、概略の位置情報を用いるだけで、例えば駅構内における近接する分岐線同士であっても、鉄道車両の現在位置を正確に検出することができる。
【0014】
特に、ニューラルネット手法においては、分岐した線路の位置データ、すなわち走行曲線を、車両の進行方向距離および幅方向距離にて正規化した正規化曲線と、予め設置された分岐器の種類毎に、正規化された基準曲線とのデータマッチングを行うようにしたので、容易且つ迅速に、走行曲線すなわち分岐線路を検出することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施例における鉄道車両の位置検出装置の概略構成を示すブロック図である。
【図2】同位置検出装置の進行方向推定部で用いられるファジィルールを示す図表である。
【図3】同進行方向推定部で用いられる出力用のメンバーシップ関数を示す。
【図4】同進行方向推定部での推定方法を説明するグラフである。
【図5】同進行方向推定部での推定期間を説明するための図である。
【図6】同位置検出装置の分岐信頼度曲線算出部で得られる分岐信頼度曲線を示す図である。
【図7】同位置検出装置の分岐線番検出部の概略構成を示すブロック図である。
【図8】分岐の種類を説明する図である。
【図9】分岐線路の線番の種類を説明する図である。
【図10】図9の分岐線路の正規化曲線を示す図である。
【図11】振分け率ごとの正規化曲線を示す図である。
【図12】分岐線路の振分け率の種類を説明する図である。
【図13】図12の分岐線路の正規化曲線を示す図である。
【図14】線番ごとの正規化曲線を示す図である。
【図15】本発明の鉄道車両の位置検出方法におけるニューラルネット手法を説明する模式図である。
【図16】本発明の鉄道車両の位置検出方法を説明するための鉄道線路の模式図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態に係る鉄道車両の位置検出装置および位置検出方法を具体的に示した実施例に基づき説明する。
まず、鉄道線路の分岐部分について概略的に説明する。
【0017】
鉄道線路は、例えば駅構内においては、駅同士を結ぶ本線から多数の支線が分岐したり、または支線がさらに分岐している場合がある。例えば、本線から支線が順番に分岐しており、分岐位置つまり分岐点には、当然ながら、分岐器が配置されている。
【0018】
さらに、大きい駅などでは分岐点が多数ある上に、その隣同士の線路も互いに接近しており、このような場所で、鉄道車両、例えば線路の保全を行う保全車両がどの分岐線に入ったかを検出することは、GPS情報だけで正確に判断することが難しい。
【0019】
そこで、この位置検出装置および位置検出方法は、測位精度が高くない単独測位によるGPS情報を用いて保全車両の位置、特にどの分岐点を経由してどの分岐線に進行したかを正確に検出し得るものである。
【0020】
この位置検出装置には地図データが具備されるとともに、GPS情報に基づく概略位置情報と協働して駅構内などの分岐線がある場所での保全車両の位置を地図上に表示する機能が具備されている。
【0021】
この地図データには、線路情報として、本線・分岐線などを区別する線路番号(以下、分岐線番ともいう)、分岐点番号(分岐器番号でもある)、分岐点同士間距離、分岐器情報(分岐振分け率、分岐番数などであり、後で説明する)などが含まれている。この線路情報は、後述する構成部材の必要な箇所に具備されるか、または必要に応じて入力するようにされている。なお、以下において、分岐に関する情報、例えば分岐点番号(分岐器番号)、線路番号などについては、分岐情報と称して説明する。
【0022】
また、この位置検出装置には、GPS衛星からの測位信号を受信することにより保全車両の概略位置を検出するためのGPS計測機が具備されている。なお、上述したように、このGPS計測機は補助的に用いられるもので、単独測位方式による低価格のものを用いることができる。
【0023】
以下、鉄道用保全車両の位置検出装置を図面に基づき説明する。
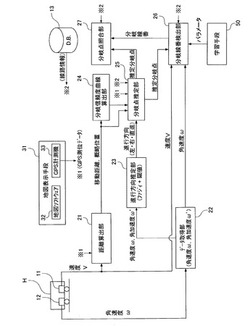
この位置検出装置は、図1に示すように、保全車両Hに設けられてその速度vを検出する速度検出器(例えば、走行車輪の回転数をパルス信号として検出するパルス検出器が用いられる)11と、保全車両Hに設けられて当該保全車両Hの進行方向での角速度ωを検出する角速度検出器12と、上記線路情報を保持している線路情報記憶部(所謂、データベースである)13と、上記速度検出器11から速度を入力するとともに移動開始(走行開始)からの時間に基づき移動開始地点(基準位置)からの保全車両Hの移動距離(パルス検出器を用いる場合には、パルス数に1パルスにて移動する距離を掛けることにより求められ、所謂、距離程である)を演算し且つGPS計測機(後述する)33にて得られた現在の概略位置を入力するとともに当該移動距離に基づき地図上での保全車両Hの概略位置を求め得る距離算出部21と、上記角速度検出器12からの角速度ωを入力してその時間変化率(微分値)である角加速度ω′を算出するデータ取得部(勿論、時間計測部が具備されている)22と、上記データ取得部22から角速度ωおよび角加速度ω′を入力してその進行方向をファジィ推論により推定する進行方向推定部23と、上記距離算出部21にて得られた移動距離および概略位置を入力して地図上での分岐ゾーン(分岐点を中心にした所定長さ範囲)内であるかを判断するための分岐信頼度曲線(後述する)を算出する分岐信頼度曲線算出部24と、上記距離算出部21で算出された移動距離および概略位置を入力するとともに分岐信頼度曲線に基づき分岐点を推定し、この推定分岐点を出力する分岐点推定部25と、上記速度検出器11から速度vを入力するとともに上記データ取得部22から角速度ωを入力し且つ上記分岐点推定部25からの推定分岐点を入力してニューラルネット手法を用いて分岐線番を検出する分岐線番検出部26と、上記分岐点推定部25で求められた推定分岐点および上記分岐線番検出部26で検出された分岐線番を入力して予め備えられた線路情報に合致するか否かを照合する分岐点照合部27とが具備されている。
【0024】
また、保全車両H側には、地図上に保全車両Hの現在位置を表示し得る車両位置表示ソフトウエア32および上記GPS計測機33を有する地図表示手段31が具備されている。当然に、上記分岐点照合部27にて得られた分岐点番号、分岐線番などの分岐情報が入力されて、保全車両Hの正しい位置が地図上に表示される。
【0025】
次に、進行方向推定部23について説明する。
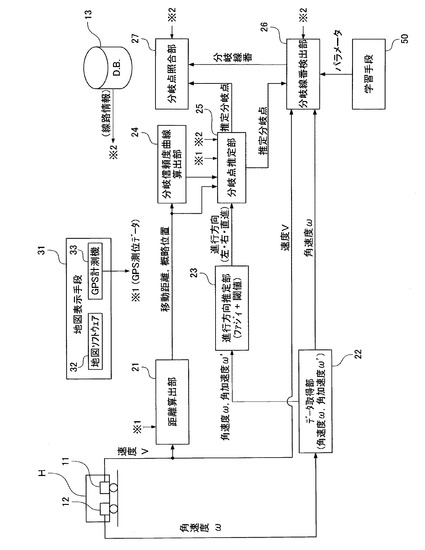
この進行方向推定部23では、ファジィ推論により、直進またはどちらの方向に曲がったかが判断され、例えば図2の図表に示すようなファジィルールが用いられる。
【0026】
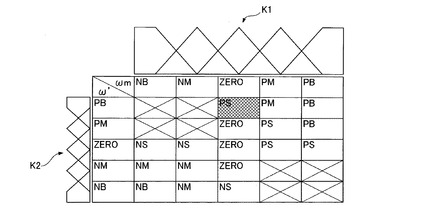
このファジィルールでは、入力値が角速度ωm(所定時間での平均値)と、角加速度ω′とである。これらの入力値は、それぞれ、NB(負大)、NM(負中)、ZERO、PM(正中)、PB(正大)であり、両者とも、図2に示す図表の外側に描かれたメンバーシップ関数K1,K2が用いられる。また、出力値についても、NB(負大)、NM(負中)、ZERO、PM(正中)、PB(正大)であり、図3に示すようなメンバーシップ関数K3が用いられる。
【0027】
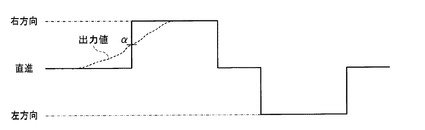
例えば、ωmがゼロに近く(ZERO)、ω′が右に大きい(正大)ならば、やや右に曲がっている(PS)と判断される(図2の網掛け部分に相当する)。
そして、出力値については、例えばマックス・ミニ重心法に基づき求められる。図3に出力に用いられるメンバーシップ関数K3を示す。また、このメンバーシップ関数K3から得られる出力値を示すと、図4のような破線で示す曲線となり、この出力値が予め決められた閾値αを超えるか超えないかで、右方向(左方向)または直線かが決定される。
【0028】
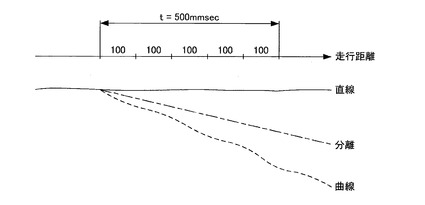
なお、判定のために、図5に示すような判定時間(例えば、t=500mmsecとされるが、任意の値に設定し得る)が設けられている。これは、分岐ではなく、線路が曲がっているか否かを判断するための猶予期間である。例えば、実際の判定は100mmsec毎に行われ、残りの400mmsecが確認期間となる。なお、閾値αを用いて判断するようにしているのは、判定度合いを調整し、外乱変動を除去するためである。
【0029】
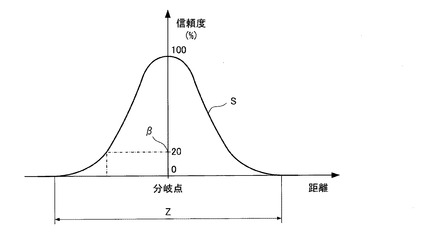
次に、分岐信頼度曲線算出部24では、分岐点であるかどうかを判断するための分岐信頼度曲線が算出(作成)される。図6に示すように、この分岐信頼度曲線Sとして、例えば正規分布曲線(ガウス曲線)Sが用いられる。この分岐信頼度曲線Sの中央の最大値を示す点が分岐ゾーンZの中心すなわち分岐点に対応する。図6に示す座標の横軸は距離を表わし、縦軸は信頼度(%)を表わしている。例えば、保全車両Hの概略位置が分岐ゾーンZ内で且つ予め設定された閾値αを超える範囲内に入った場合に分岐したと推定される。この閾値βとしては、例えば20%にされている。勿論、この閾値βは実際の運用に応じて適正に分岐点であるか否かを推定し得るように調整される。
【0030】
次に、分岐点推定部25について説明する。
この分岐点推定部25は、上記進行方向推定部23で推定された進行方向(左・右・直進)および分岐信頼度曲線算出部24から入力された分岐信頼度曲線Sを入力して、保全車両Hが線路上のどの分岐点を通過するかまたは通過したかを推定するようにされている。ここでは、左方向または右方向に分岐した場合、言い換えれば、同一方向に1本だけ分岐している場合(分岐線が1本である)の他に、分岐点で方向を変えずに保全車両Hが分岐ゾーンZをそのまま通過して直進したことを推定することができる。
【0031】
具体的には、距離算出部21からの移動距離および概略位置を入力するとともに分岐信頼度曲線算出部24から入力された分岐信頼度曲線Sおよび進行方向推定部23で求められた進行方向並びに線路情報記憶部13から入力された線路情報に基づき分岐点が推定される。
【0032】
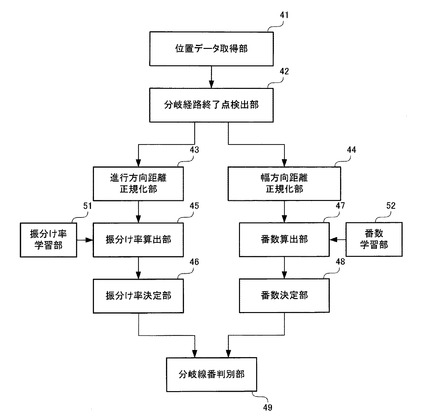
上記分岐線番検出部26は、図7に示すように、上記分岐点推定部25で求められた推定分岐点、データ取得部22から保全車両Hの角速度ω、並びに速度検出器11からの速度vがそれぞれ入力されて保全車両Hの走行経路の位置データ(データ採取時間間隔毎の位置データである)を取得する位置データ取得部41と、この位置データ取得部41で取得された推定分岐点に設けられている分岐器より分岐経路の終了点(線路情報にて予め分かっている)を検出する分岐経路終了点検出部42と、この分岐経路終了点検出部42で求められた終了点までの進行方向距離(分岐前本線方向に沿う距離で、走行方向距離ともいえる)の正規化を行う進行方向距離正規化部43と、同じく上記分岐経路終了点検出部42で求められた終了点までの幅方向距離(分岐前の本線と垂直方向距離)の正規化を行う幅方向距離正規化部44と、上記進行方向距離正規化部43で正規化された正規化走行曲線データを入力してニューラルネット手法を用いて振分け率を算出する振分け率算出部45と、この振分け率算出部45にて求められた振分け率を入力して予め入力されている比較用の正規の振分け率(実際に用いられている正確な振分け率)とを比較して最も近い振分け率を選択する(データマッチング)ことにより分岐器の振分け率(後述する)を決定する振分け率決定部46と、上記進行方向距離正規化部43で正規化された正規化走行曲線データを入力してニューラルネット手法を用いて番数を算出する番数算出部47と、この番数算出部47にて求められた番数を予め入力されている比較用の正規の番数(実際に用いられている正確な番数)とを比較して最も近い番数を選択する(データマッチング)ことにより分岐器の番数(後述する)を決定する番数決定部48と、上記各決定部46,48で求められた振分け率および番数を入力するとともに予め入力されている分岐器情報の中から当該振分け率と番数とに該当する分岐器すなわち分岐線番を判別する分岐線番判別部49とから構成されている。
【0033】
ここで、分岐器の構成について説明しておく。
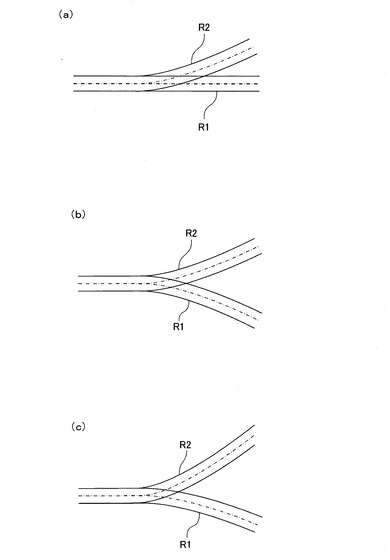
分岐器は、現在走行している基準線路を左方向または右方向に離れていく分岐線路に分岐させるもので複数の種類が準備されている。分岐器の種類については、左右方向への分岐割合を示す振分け率と、基準線路に対する分岐線路の開き度合いを表わす番数とで区分けされている。
【0034】
振分け率については、左右への振分け率が、9:1,4:1,7:3,3:1,2:1,3:2などの種類が設けられている。
また、分岐形状については、片開き分岐(一方にだけ分岐)、両開き分岐(両側に等しい角度で分岐)、振分け分岐(左右に等しくない角度で分岐)などの種類がある。上述した振分け率の数値は、主に左方向に分岐する左片開き分岐の場合であり、そのため、左側の数値が大きい値にされているが、逆に、右方向に分岐する右片開き分岐の場合には、比率の右側の数値が大きい値にされる。すなわち、分岐の振分け率は、1:9,1:4,3:7,1:3,1:2,2:3にされる。図8に分岐の種類を示しておく。(a)は片開き分岐、(b)は両開き分岐、(c)は振分け分岐(7:3)の場合を示す。なお、片開き分岐は10:0の振分け分岐と考えることもでき、両開き分岐は5:5の振分け分岐と考えることができる。
【0035】
さらに、番数とは、分岐器における基準線路に対する分岐線路の開き度合(基準線路と分岐線路とのなす角度で、以下、分岐角という)を示すものである。簡単に言えば、基準線路から分岐線路が1m離れるのに必要な長さをメートルで表わしたものである。具体的には、片開き分岐の場合で、基準線路が分岐点(理論交点)から12m進んだ地点で分岐線路との離間距離(開き)が1mである場合に、12番分岐と呼ぶ。
【0036】
なお、番数nと分岐角θとの関係は下記(1)式にて表わされる(これは、両振分け分岐を基準とした式である)。
θ=2×tan−1(1/2n) ・・・(1)
また、振分け率mを考慮した場合における番数nと分岐角θとの関係を表わす簡易式は下記(2)式にて表わされる。
【0037】
θ=2×(m/10)×tan−1(1/2n) ・・・(2)
すなわち、mが10の場合は片開き分岐となり、mが5の場合は両開き分岐となり、mが1,2,3,4,6,7,8,9の場合が振分け分岐となる。
【0038】
次に、上記各算出部45,47での演算方法について説明する。
これら各算出部45,47では、現在走行している正規化された走行曲線データが入力されて、振分け率および番数がニューラルネット手法に基づく演算式により求められる。
【0039】
ところで、ニューラルネット手法における演算式、より具体的には、演算式のパラメータについては、予め、正規の振分け率基準曲線および番数基準曲線に基づき学習されており、以下、これら基準曲線について説明する。
【0040】
まず、振分け率基準曲線の求め方について説明する。
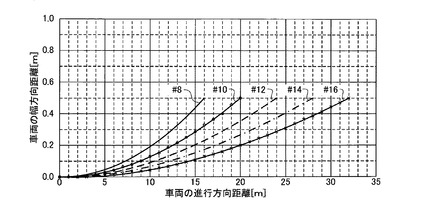
例えば、両開き分岐の場合、番数が異なる5種類(番数が、8,10,12,14,16の場合)の分岐線路(走行曲線)を描くと図9のようになる。この場合の離間距離は1mであるが、基準線路に対する離間距離である幅方向距離は0.5mとなる。
【0041】
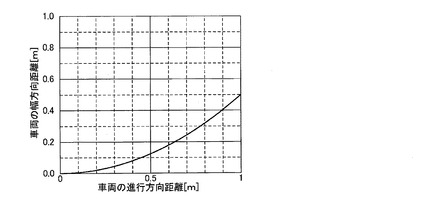
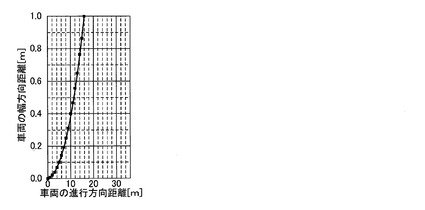
次に、これらの分岐線路を走行方向距離でもって正規化すると、図10に示すように、全ての分岐線路は1本の曲線で表わされる。つまり、同じ振分け率の場合には、番数が異なっても、同一の曲線に集約されることになる。
【0042】
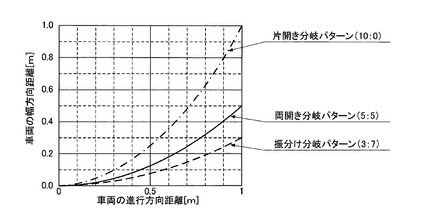
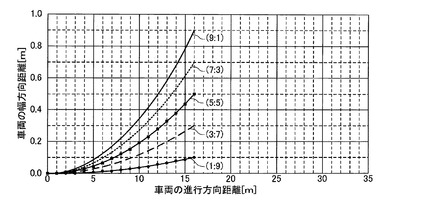
すなわち、分岐器で振り分けられた分岐線路を走行方向距離で正規化すると、図11に示すように、振分け率に応じた曲線(分岐パターン)が得られる。したがって、分岐器の種類に応じて得られる振分け率基準曲線とのデータマッチング(パターンマッチングとも言える)を行うことにより、現在、走行している分岐線路の振分け率を決定することができる。
【0043】
次に、番数基準曲線の求め方について説明する。
例えば、番数が8で、振分け率が異なる5種類(振分け率が、9:1,7:3,5:5,3:7,1:9の場合)の分岐線路を描くと図12のようになる。この場合の走行方向距離は全て16mであるのに対して、幅方向距離はそれぞれ振分け率に応じて、0.9,0.7,0.5,0.3,0.1mとなる。
【0044】
そして、このこれらの分岐線路を幅方向距離でもって正規化すると、図13に示すように、全ての分岐線路は1本の曲線で表わされる。つまり、同じ番数の場合には、振分け率が異なっても、同一の曲線に集約されることになる。
【0045】
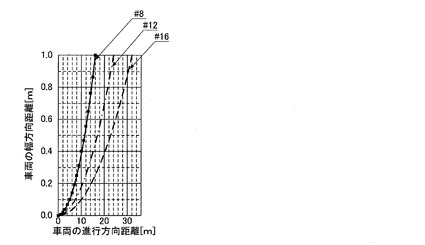
すなわち、分岐器で振り分けられた分岐線路を幅方向距離で正規化すると、図14に示すように、番数に応じた曲線(番数パターン)が得られる。したがって、分岐器の種類に応じて得られる番数基準曲線とのデータマッチング(パターンマッチングとも言える)を行うことにより、現在、走行している分岐線路の番数を求めることができる。
【0046】
このように、求められた分岐線路の振分け率および番数から、通過した分岐器の種類、すなわち分岐器番号を判別することができる。
言い換えれば、予め、分岐器の種類毎に車両の走行方向距離を正規化して振分け率を特定し得る振分け率基準曲線と、分岐器の種類毎に車両の幅方向距離を正規化して番数を特定し得る番数基準曲線とを求めておくとともに、これらの基準曲線と実際に車両が走行している走行曲線とのデータマッチングを行うことにより、通過した分岐器の番号を検出することができる。すなわち、保全車両Hの現在の概略位置を用いることにより、現在走行している分岐線路を正確に検出することができる。
【0047】
ここで、ニューラルネット手法におけるデータマッチングの方法を、より具体的に説明する。
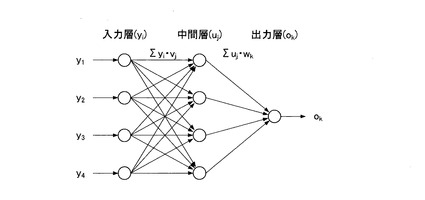
なお、ニューラルネットにおいては、通常、入力層、中間層、出力層が設けられるとともに、入力値と重み係数との積和が中間層に入力され、さらに中間層で得られた中間値と重み係数との積和が出力層に入力されて、出力値を得るようにされている。また、振分け率を求めるニューラルネットにおいては、振分け率を表わす1個の出力(ニューロン)が設けられ、番数を求めるニューラルネットにおいては、番数を表わす1個の出力(ニューロン)が設けられる。さらに、入力層においては、所定時間間隔での走行曲線の幅方向における位置データ(進行方向をx座標とした場合には、y座標データである)の採取位置に応じた個数分の入出力(ニューロン)が設けられる。なお、中間層においては、適当な個数分(例えば、入力の個数分程度)の入出力(ニューロン)が設けられているものとする。また、中間層および出力層の各ニューロンには、入力値から出力値を求めるための出力関数g,f(例えば、シグモイド関数が用いられる)が設けられており、それぞれの入力値に対して0と1の間の数値が出力される。
【0048】
そして、振分け率算出部45および番数算出部47で求められた数値が振分け率決定部46および番数決定部48に入力され、これら数値と正規の数値とが比較されて、最も近い数値が振分け率および番数として出力される。
【0049】
次に、ニューラルネット手法を用いた分岐線番の検出方法について説明する。
まず、速度と角速度とに基づく位置データから走行曲線(分岐線路)を求めた後、この走行曲線を正規化して正規化走行曲線を求める。
【0050】
そして、この正規化走行曲線を、予め、決められた距離間隔でもってその幅方向での位置(y座標)を抽出し、この抽出された位置データyiを入力層の各ニューロンに入力するとともにこれら各位置データに予め求められている各重み係数vjを掛けた値の合計、つまり積和(Σyi・vj)を求める。
【0051】
次に、この合計値が中間層のニューロンの出力関数gに入力されて、中間値ujが出力され、この中間値ujに重み係数ωkを掛けた値の合計、つまり積和(Σui・ωk)が上記と同様に、出力層のニューロンの出力関数fに入力されて、出力値okが出力される。なお、上述したように、分岐番数および振分け率は共に一次元であるため、出力層は一つである(k=1)。
【0052】
すなわち、走行曲線の所定距離間隔ごとのy座標データが振分け率算出部45に入力されると、ニューラルネットにより当該走行曲線の振分け率が求められた後、この数値が振分け率決定部46に入力されて最も近い振分け率が検出される。
【0053】
また、これと同時に、同じy座標データが番数算出部47に入力されると、ニューラルネットにより当該走行曲線の番数を表わす数値が求められた後、この数値が番数決定部48に入力されて最も近い番数が検出される。
【0054】
すなわち、ニューラルネット手法に基づき分岐器の種類が特定されることになる。
なお、上述したニューラルネット手法での演算の流れを、図15に示しておく。
ところで、上述したように、各算出部45,47では、ニューラルネット手法により、振分け率および番数を表わす数値が求められるが、この演算に用いられる重み係数などのパラメータについては、教師データに基づき学習が行われる。勿論、この学習を行う際には、教師データが用いられるとともに、この教師データと出力層における各出力値との差の最小となるように、例えば最急降下法により、重み係数(結合荷重)が修正されていく。すなわち、図7に示すように、これら各算出部45,47には、重み係数などのパラメータを修正するためのの振分け率学習部51および番数学習部52が具備されている。なお、これらの学習部51,52は、学習が済んだ時点で各算出部45,47から切り離される。つまり、この学習動作はオフラインで行われる。なお、図1に、これらの学習部51,52を纏めて学習手段50として記載している。
【0055】
次に、分岐点照合部27では、上記分岐点推定部25で推定された推定分岐点および上記分岐線番検出部26で検出された分岐線番が入力されて、予め入力されている線路情報(特に、分岐情報)の内容と照合して、その分岐点が正しいものかどうかが判定される。照合が正しい場合には、通過した分岐点番号、分岐線番が進行方向、時刻などと合わせて地図表示手段31側に送られ、地図上に保全車両Hの正確な現在位置が表示される。なお、分岐点照合部27で照合できなかった場合には、アラーム信号が地図表示手段31側に送られて、注意が喚起される。
【0056】
次に、保全車両が駅構内でどの分岐線に移動したかを検出する位置検出方法について、より具体的に説明する。
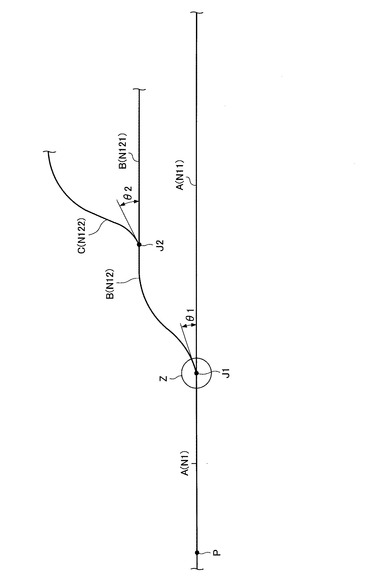
ここでは、図16に示すような駅構内での保全車両Hの位置を検出する場合について説明する。なお、以下の説明中、括弧内の頭にNが付く番号は線路番号を表わすものとする。
【0057】
図16に示すように、本線Aには左方向に分岐角θ1でもって分岐する第1分岐線B(N12)が設けられており、またこの第1分岐線Bには左方向に分岐角θ2でもって分岐する第2分岐線C(N122)が設けられている。
【0058】
上記保全車両Hの移動開始地点(走行開始地点)をPとして、保全車両Hが移動(走行)を開始すると、GPS計測機33からの概略位置が距離算出部21に入力されて保全車両Hの概略位置が検出されるとともに、速度検出器11からの速度vにより移動距離が算出される。
【0059】
また、角速度検出器12から角速度ωがデータ取得部22に入力されてその時間変化率である角加速度ω′が求められる。
そして、この角加速度ω′が角速度ωとともに進行方向推定部23に入力され、ここで上述したファジィルールに基づきその進行方向が推定される。
【0060】
一方、分岐信頼度曲線算出部24では概略位置が入力されるとともに次に通過する分岐器(分岐番号J(i))での分岐信頼度曲線(分岐ゾーンにおける分岐点からの距離に逆比例する値、つまり分岐点に近い方が高く、分岐ゾーンの境界に近くなると低くなるような正規分布曲線)Sが算出されて分岐点推定部25に入力される。
【0061】
分岐点推定部25では、距離算出部21から概略位置および正確な移動距離が入力されるとともに、進行方向推定部23からは進行方向が入力され、分岐信頼度曲線Sに基づき分岐信頼度が所定の閾値(例えば、20%)βを超えた場合に入力された進行方向に分岐したと推定され、そしてこの分岐した地点すなわち分岐点番号および進行方向が出力される。なお、左方向または右方向に分岐した場合には、分岐信頼度が閾値βを超えた時点で分岐方向を推定し得るが、直進については、分岐ゾーンZを通過した時点で直進したことが推定される。
【0062】
次に、この分岐点推定部25で求められた推定分岐点および進行方向並びにデータ取得部22から保全車両Hの角速度ω、速度検出器11から保全車両Hの速度vが分岐線番検出部26に入力される。
【0063】
この分岐線番検出部26では、上述したように、走行曲線つまり分岐線路が求められた後、正規化されて、予め求められている基準曲線とのデータマッチングにより、分岐線路の振分け率および番数が求められて、通過した分岐器つまり現在走行している分岐線路が検出される。
【0064】
そして、分岐点推定部25で推定された分岐点番号および分岐線番検出部26で検出された分岐線番が分岐点照合部27に入力されて、予め入力されている線路情報に基づき、それぞれ、通過した分岐点および分岐方向の線路である分岐線番に一致するか否かが照合される。
【0065】
例えば、第1分岐点J1で左方向に分岐した後、第2分岐点J2で左方向に通過した場合について説明する。
第1分岐点J1の通過時は、進行方向推定部23から「左方向」が分岐点推定部25に入力されるとともに、保全車両Hの距離が、対応する分岐信頼度曲線の閾値βを超えた場合に、第1分岐点J1を左方向に分岐したものと推定され、その推定分岐点番号J1および分岐線番B(N12)が出力される。なお、保全車両Hが直進した場合には、第1分岐点J1の分岐ゾーンZを出た瞬間にそのことが分かり、同様に、分岐点番号J1および分岐線番A(N11)が出力される。
【0066】
そして、分岐点推定部25から出力された推定分岐点番号J1および分岐線番検出部26から出力された分岐線番B(N12)が分岐点照合部27に入力されて、ここで予め入力されている線路情報に一致するか否かが判断される。これらの照合が済むと、その線路情報が地図表示手段31に出力され、保全車両Hの現在位置が地図上に表示される。
【0067】
さらに、保全車両Hが分岐線番B(N12)を走行して第2分岐点J2を左方向に分岐した場合も同様に、その分岐点番号J2および分岐線番C(N122)が出力され、分岐器の照合を経た後、保全車両Hの現在位置が地図上に表示される。
【0068】
上述したように、保全車両が本線から分岐線に分岐した場合には、距離算出部にて得られる保全車両の移動距離およびGPS測位データにより概略位置が分かり、また鉄道車両の角速度および角加速度に基づくファジィルールによりその進行方向が推定されるとともに分岐点についても推定され、そしてこの推定分岐点が分岐線番検出部に入力され、ここで、ニューラルネット手法により、分岐器の特徴である振分け率および番数が求められて正確な分岐線番が検出される。すなわち、従来のように、GPS測位データを用いて現在走行している線路を特定するシステムに比べて、概略の位置情報を用いるだけで、例えば駅構内における近接する分岐線同士であっても、保全車両の現在位置を正確に検出することができる。
【0069】
特に、ニューラルネット手法においては、分岐した線路の位置データ、すなわち走行曲線を、車両の進行方向距離および幅方向距離にて正規化した正規化曲線と、予め設置された分岐器の種類毎に、正規化された基準曲線とのデータマッチングを行うようにしたので、容易且つ迅速に、走行曲線すなわち分岐線路を検出(特定)することができる。
【0070】
ところで、上述した鉄道用保全車両の位置検出方法を工程形式にて記載すると以下のようになる。
すなわち、この位置検出方法は、鉄道車両の概略位置を検出し得るGPS計測機と、鉄道車両の速度を検出する速度検出器と、鉄道車両に設けられて当該鉄道車両の進行方向での角速度を検出する角速度検出器とが具備された鉄道車両の位置を検出する方法であって、
上記速度検出器で検出された速度を入力して移動距離を算出するとともに当該移動距離および上記GPS計測機により得られた移動開始位置に基づき地図上での鉄道車両の概略位置を算出し得る距離算出工程と、上記角速度検出器で検出された角速度を入力して鉄道車両の進行方向での角加速度を求めるデータ取得工程と、上記データ取得工程からの角加速度および鉄道車両の角速度を用いてその進行方向をファジィ推論により推定する進行方向推定工程と、上記距離算出工程で算出された移動距離および概略位置を入力するとともに分岐信頼度曲線に基づき分岐点を推定する分岐点推定工程と、この分岐点推定行程で求められた推定分岐点並びに鉄道車両の角速度および速度を入力してニューラルネット手法を用いて鉄道車両が走行している分岐線番を検出する分岐線番検出工程と、上記分岐点推定工程で求められた推定分岐点および上記分岐線番検出工程で検出された分岐線番を入力して予め備えられた線路情報に合致するか否かを照合する分岐点照合工程とを具備した方法であり、
また上記進行方向推定工程において、角速度および角加速度に基づくファジィルールを用いて、鉄道車両の進行方向を、左方向、右方向および直進のいずれかを推定する方法であり、
さらに上記分岐線番検出工程において、
推定分岐点、鉄道車両の角速度および速度が入力されて鉄道車両の位置データである走行曲線を取得し、この取得された走行曲線を進行方向距離および幅方向距離にて正規化し、これら正規化された正規化曲線データを入力してニューラルネット手法を用いて振分け率および番数を算出し、これら求められた振分け率および番数を入力して予め入力されている基準振分け率および基準番数と比較して最も近い基準振分け率および基準番数を選択することにより分岐器の振分け率および番数を決定し、これら決定された振分け率および番数に基づき、予め入力されている分岐器情報の中から当該振分け率および番数に該当する分岐器における分岐線番を判別する方法である。
【符号の説明】
【0071】
1 位置検出装置
11 速度検出器
12 角速度検出器
13 線路情報記憶部
21 距離算出部
22 データ取得部
23 進行方向推定部
24 分岐信頼度曲線算出部
25 分岐点推定部
26 分岐線番検出部
27 分岐点照合部
31 地図表示手段
33 GPS計測機
41 位置データ取得部
42 分岐経路終了点検出部
43 走行方向距離正規化部
44 幅方向距離正規化部
45 振分け率算出部
46 振分け率決定部
47 番数算出部
48 番数決定部
49 分岐線番判別部
【技術分野】
【0001】
本発明は、鉄道車両の位置検出装置および位置検出方法に関する。
【背景技術】
【0002】
従来、レールなどの点検を行うための鉄道車両、例えば線路の保全を行う保全車両の安全を図るために、保全車両の位置が検出されており、例えばその位置検出に際しては、GPS衛星からの測位データが用いられている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−17240号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、GPS衛星からの測位データにより保全車両の位置を特定しようとすると、精度が高くなく且つ駅構内で線路が多数分岐している場合には、線路同士の間隔が狭いため、どの分岐線に移動したかを特定するのが難しいという問題がある。
【0005】
また、保全車両がトンネルなどに入った場合には電波が届かないため、トンネル内またはトンネル出口の直ぐ近くに分岐器がある場合には、やはり、どの分岐線に移動したかを正確に特定することができないという問題がある。
【0006】
そこで、本発明は、例えば駅構内のように分岐線の間隔が狭くしかもGPS計測機の精度が低い場合、またはトンネル内のようにGPS衛星からの測位データを利用し得ない場合でも、どの分岐線に入ったかを精度良く検出し得る鉄道車両の位置検出装置および位置検出方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の鉄道車両の位置検出装置は、鉄道車両の位置を検出する装置であって、
鉄道車両の概略位置を検出し得るGPS計測機と、鉄道車両の速度を検出する速度検出器と、鉄道車両に設けられて当該鉄道車両の進行方向での角速度を検出する角速度検出器と、上記速度検出器で検出された速度を入力して移動距離を算出するとともに当該移動距離および上記GPS計測機により得られた移動開始位置に基づき地図上での鉄道車両の概略位置を算出し得る距離算出部と、上記角速度検出器で検出された角速度を入力して鉄道車両の進行方向での角加速度を求めるデータ取得部と、このデータ取得部からの角加速度および鉄道車両の角速度を用いてその進行方向をファジィ推論により推定する進行方向推定部と、上記距離算出部で算出された移動距離および概略位置を入力するとともに分岐信頼度曲線に基づき分岐点を推定する分岐点推定部と、この分岐点推定部で求められた推定分岐点並びに鉄道車両の角速度および速度を入力してニューラルネット手法を用いて鉄道車両が走行している分岐線番を検出する分岐線番検出部と、上記分岐点推定部で求められた推定分岐点および上記分岐線番検出部で求められた分岐線番を入力して予め備えられた線路情報に合致するか否かを照合する分岐点照合部とを具備したものである。
【0008】
また、請求項2に記載の鉄道車両の位置検出装置は、請求項1に記載の位置検出装置の進行方向推定部において、角速度および角加速度に基づくファジィルールを用いて、鉄道車両の進行方向を、左方向、右方向および直進のいずれかを推定するようにしたものである。
【0009】
また、請求項3に記載の鉄道車両の位置検出装置は、請求項1または2に記載の位置検出装置の分岐線番検出部を、
推定分岐点、角速度検出器からの角速度、および速度検出器からの速度が入力されて鉄道車両の位置データである走行曲線を取得する位置データ取得部と、この位置データ取得部で取得された走行曲線を進行方向距離にて正規化する進行方向距離正規化部と、上記走行曲線を幅方向距離にて正規化する幅方向距離正規化部と、上記進行方向距離正規化部で正規化された正規化曲線データを入力してニューラルネット手法を用いて振分け率を算出する振分け率算出部と、この振分け率算出部にて求められた振分け率を入力して予め入力されている基準振分け率と比較して最も近い基準振分け率を選択することにより分岐器の振分け率を決定する振分け率決定部と、上記幅方向距離正規化部で正規化された正規化曲線データを入力してニューラルネット手法を用いて番数を算出する番数算出部と、この番数算出部にて求められた番数を入力して予め入力されている基準番数と比較して最も近い基準番数を選択することにより分岐器の番数を決定する番数決定部と、上記各決定部で決定された振分け率および番数を入力するとともに予め入力されている分岐器情報の中から当該振分け率および番数に該当する分岐器における分岐線番を判別する分岐線番判別部とから構成したものである。
【0010】
さらに、請求項4に記載の鉄道車両の位置検出方法は、鉄道車両の概略位置を検出し得るGPS計測機と、鉄道車両の速度を検出する速度検出器と、鉄道車両に設けられて当該鉄道車両の進行方向での角速度を検出する角速度検出器とが具備された鉄道車両の位置を検出する方法であって、
上記速度検出器で検出された速度を入力して移動距離を算出するとともに当該移動距離および上記GPS計測機により得られた移動開始位置に基づき地図上での鉄道車両の概略位置を算出し得る距離算出工程と、上記角速度検出器で検出された角速度を入力して鉄道車両の進行方向での角加速度を求めるデータ取得工程と、このデータ取得工程からの角加速度および鉄道車両の角速度を用いてその進行方向をファジィ推論により推定する進行方向推定工程と、上記距離算出工程で算出された移動距離および概略位置を入力するとともに分岐信頼度曲線に基づき分岐点を推定する分岐点推定工程と、この分岐点推定行程で求められた推定分岐点並びに鉄道車両の角速度および速度を入力してニューラルネット手法を用いて鉄道車両が走行している分岐線番を検出する分岐線番検出工程と、上記分岐点推定工程で求められた推定分岐点および上記分岐線番検出工程で検出された分岐線番を入力して予め備えられた線路情報に合致するか否かを照合する分岐点照合工程とを具備した方法である。
【0011】
また、請求項5に記載の鉄道車両の位置検出方法は、請求項4に記載の位置検出方法の進行方向推定工程において、角速度および角加速度に基づくファジィルールを用いて、鉄道車両の進行方向を、左方向、右方向および直進のいずれかを推定する方法である。
【0012】
さらに、請求項6に記載の鉄道車両の位置検出方法は、請求項4または5に記載の位置検出方法の分岐線番推定工程において、
推定分岐点、鉄道車両の角速度および速度が入力されて鉄道車両の位置データである走行曲線を取得し、この取得された走行曲線を進行方向距離および幅方向距離にて正規化し、これら正規化された正規化曲線データを入力してニューラルネット手法を用いて振分け率および番数を算出し、これら求められた振分け率および番数を入力して予め入力されている基準振分け率および基準番数と比較して最も近い基準振分け率および基準番数を選択することにより分岐器の振分け率および番数を決定し、これら決定された振分け率および番数に基づき、予め入力されている分岐器情報の中から当該振分け率および番数に該当する分岐器における分岐線番を判別する方法である。
【発明の効果】
【0013】
上記位置検出装置および位置検出方法によると、鉄道車両が本線から分岐線に分岐した場合には、距離算出部にて得られる鉄道車両の移動距離およびGPS測位データにより概略位置が分かり、また鉄道車両の角速度および角加速度に基づくファジィルールによりその進行方向が推定されるとともに分岐点についても推定され、そしてこの推定分岐点が分岐線番検出部に入力され、ここで、ニューラルネット手法により、分岐器の特徴である振分け率および番数が求められて正確な分岐線番が検出される。すなわち、従来のように、GPS測位データを用いて現在走行している線路を特定するシステムに比べて、概略の位置情報を用いるだけで、例えば駅構内における近接する分岐線同士であっても、鉄道車両の現在位置を正確に検出することができる。
【0014】
特に、ニューラルネット手法においては、分岐した線路の位置データ、すなわち走行曲線を、車両の進行方向距離および幅方向距離にて正規化した正規化曲線と、予め設置された分岐器の種類毎に、正規化された基準曲線とのデータマッチングを行うようにしたので、容易且つ迅速に、走行曲線すなわち分岐線路を検出することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施例における鉄道車両の位置検出装置の概略構成を示すブロック図である。
【図2】同位置検出装置の進行方向推定部で用いられるファジィルールを示す図表である。
【図3】同進行方向推定部で用いられる出力用のメンバーシップ関数を示す。
【図4】同進行方向推定部での推定方法を説明するグラフである。
【図5】同進行方向推定部での推定期間を説明するための図である。
【図6】同位置検出装置の分岐信頼度曲線算出部で得られる分岐信頼度曲線を示す図である。
【図7】同位置検出装置の分岐線番検出部の概略構成を示すブロック図である。
【図8】分岐の種類を説明する図である。
【図9】分岐線路の線番の種類を説明する図である。
【図10】図9の分岐線路の正規化曲線を示す図である。
【図11】振分け率ごとの正規化曲線を示す図である。
【図12】分岐線路の振分け率の種類を説明する図である。
【図13】図12の分岐線路の正規化曲線を示す図である。
【図14】線番ごとの正規化曲線を示す図である。
【図15】本発明の鉄道車両の位置検出方法におけるニューラルネット手法を説明する模式図である。
【図16】本発明の鉄道車両の位置検出方法を説明するための鉄道線路の模式図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態に係る鉄道車両の位置検出装置および位置検出方法を具体的に示した実施例に基づき説明する。
まず、鉄道線路の分岐部分について概略的に説明する。
【0017】
鉄道線路は、例えば駅構内においては、駅同士を結ぶ本線から多数の支線が分岐したり、または支線がさらに分岐している場合がある。例えば、本線から支線が順番に分岐しており、分岐位置つまり分岐点には、当然ながら、分岐器が配置されている。
【0018】
さらに、大きい駅などでは分岐点が多数ある上に、その隣同士の線路も互いに接近しており、このような場所で、鉄道車両、例えば線路の保全を行う保全車両がどの分岐線に入ったかを検出することは、GPS情報だけで正確に判断することが難しい。
【0019】
そこで、この位置検出装置および位置検出方法は、測位精度が高くない単独測位によるGPS情報を用いて保全車両の位置、特にどの分岐点を経由してどの分岐線に進行したかを正確に検出し得るものである。
【0020】
この位置検出装置には地図データが具備されるとともに、GPS情報に基づく概略位置情報と協働して駅構内などの分岐線がある場所での保全車両の位置を地図上に表示する機能が具備されている。
【0021】
この地図データには、線路情報として、本線・分岐線などを区別する線路番号(以下、分岐線番ともいう)、分岐点番号(分岐器番号でもある)、分岐点同士間距離、分岐器情報(分岐振分け率、分岐番数などであり、後で説明する)などが含まれている。この線路情報は、後述する構成部材の必要な箇所に具備されるか、または必要に応じて入力するようにされている。なお、以下において、分岐に関する情報、例えば分岐点番号(分岐器番号)、線路番号などについては、分岐情報と称して説明する。
【0022】
また、この位置検出装置には、GPS衛星からの測位信号を受信することにより保全車両の概略位置を検出するためのGPS計測機が具備されている。なお、上述したように、このGPS計測機は補助的に用いられるもので、単独測位方式による低価格のものを用いることができる。
【0023】
以下、鉄道用保全車両の位置検出装置を図面に基づき説明する。
この位置検出装置は、図1に示すように、保全車両Hに設けられてその速度vを検出する速度検出器(例えば、走行車輪の回転数をパルス信号として検出するパルス検出器が用いられる)11と、保全車両Hに設けられて当該保全車両Hの進行方向での角速度ωを検出する角速度検出器12と、上記線路情報を保持している線路情報記憶部(所謂、データベースである)13と、上記速度検出器11から速度を入力するとともに移動開始(走行開始)からの時間に基づき移動開始地点(基準位置)からの保全車両Hの移動距離(パルス検出器を用いる場合には、パルス数に1パルスにて移動する距離を掛けることにより求められ、所謂、距離程である)を演算し且つGPS計測機(後述する)33にて得られた現在の概略位置を入力するとともに当該移動距離に基づき地図上での保全車両Hの概略位置を求め得る距離算出部21と、上記角速度検出器12からの角速度ωを入力してその時間変化率(微分値)である角加速度ω′を算出するデータ取得部(勿論、時間計測部が具備されている)22と、上記データ取得部22から角速度ωおよび角加速度ω′を入力してその進行方向をファジィ推論により推定する進行方向推定部23と、上記距離算出部21にて得られた移動距離および概略位置を入力して地図上での分岐ゾーン(分岐点を中心にした所定長さ範囲)内であるかを判断するための分岐信頼度曲線(後述する)を算出する分岐信頼度曲線算出部24と、上記距離算出部21で算出された移動距離および概略位置を入力するとともに分岐信頼度曲線に基づき分岐点を推定し、この推定分岐点を出力する分岐点推定部25と、上記速度検出器11から速度vを入力するとともに上記データ取得部22から角速度ωを入力し且つ上記分岐点推定部25からの推定分岐点を入力してニューラルネット手法を用いて分岐線番を検出する分岐線番検出部26と、上記分岐点推定部25で求められた推定分岐点および上記分岐線番検出部26で検出された分岐線番を入力して予め備えられた線路情報に合致するか否かを照合する分岐点照合部27とが具備されている。
【0024】
また、保全車両H側には、地図上に保全車両Hの現在位置を表示し得る車両位置表示ソフトウエア32および上記GPS計測機33を有する地図表示手段31が具備されている。当然に、上記分岐点照合部27にて得られた分岐点番号、分岐線番などの分岐情報が入力されて、保全車両Hの正しい位置が地図上に表示される。
【0025】
次に、進行方向推定部23について説明する。
この進行方向推定部23では、ファジィ推論により、直進またはどちらの方向に曲がったかが判断され、例えば図2の図表に示すようなファジィルールが用いられる。
【0026】
このファジィルールでは、入力値が角速度ωm(所定時間での平均値)と、角加速度ω′とである。これらの入力値は、それぞれ、NB(負大)、NM(負中)、ZERO、PM(正中)、PB(正大)であり、両者とも、図2に示す図表の外側に描かれたメンバーシップ関数K1,K2が用いられる。また、出力値についても、NB(負大)、NM(負中)、ZERO、PM(正中)、PB(正大)であり、図3に示すようなメンバーシップ関数K3が用いられる。
【0027】
例えば、ωmがゼロに近く(ZERO)、ω′が右に大きい(正大)ならば、やや右に曲がっている(PS)と判断される(図2の網掛け部分に相当する)。
そして、出力値については、例えばマックス・ミニ重心法に基づき求められる。図3に出力に用いられるメンバーシップ関数K3を示す。また、このメンバーシップ関数K3から得られる出力値を示すと、図4のような破線で示す曲線となり、この出力値が予め決められた閾値αを超えるか超えないかで、右方向(左方向)または直線かが決定される。
【0028】
なお、判定のために、図5に示すような判定時間(例えば、t=500mmsecとされるが、任意の値に設定し得る)が設けられている。これは、分岐ではなく、線路が曲がっているか否かを判断するための猶予期間である。例えば、実際の判定は100mmsec毎に行われ、残りの400mmsecが確認期間となる。なお、閾値αを用いて判断するようにしているのは、判定度合いを調整し、外乱変動を除去するためである。
【0029】
次に、分岐信頼度曲線算出部24では、分岐点であるかどうかを判断するための分岐信頼度曲線が算出(作成)される。図6に示すように、この分岐信頼度曲線Sとして、例えば正規分布曲線(ガウス曲線)Sが用いられる。この分岐信頼度曲線Sの中央の最大値を示す点が分岐ゾーンZの中心すなわち分岐点に対応する。図6に示す座標の横軸は距離を表わし、縦軸は信頼度(%)を表わしている。例えば、保全車両Hの概略位置が分岐ゾーンZ内で且つ予め設定された閾値αを超える範囲内に入った場合に分岐したと推定される。この閾値βとしては、例えば20%にされている。勿論、この閾値βは実際の運用に応じて適正に分岐点であるか否かを推定し得るように調整される。
【0030】
次に、分岐点推定部25について説明する。
この分岐点推定部25は、上記進行方向推定部23で推定された進行方向(左・右・直進)および分岐信頼度曲線算出部24から入力された分岐信頼度曲線Sを入力して、保全車両Hが線路上のどの分岐点を通過するかまたは通過したかを推定するようにされている。ここでは、左方向または右方向に分岐した場合、言い換えれば、同一方向に1本だけ分岐している場合(分岐線が1本である)の他に、分岐点で方向を変えずに保全車両Hが分岐ゾーンZをそのまま通過して直進したことを推定することができる。
【0031】
具体的には、距離算出部21からの移動距離および概略位置を入力するとともに分岐信頼度曲線算出部24から入力された分岐信頼度曲線Sおよび進行方向推定部23で求められた進行方向並びに線路情報記憶部13から入力された線路情報に基づき分岐点が推定される。
【0032】
上記分岐線番検出部26は、図7に示すように、上記分岐点推定部25で求められた推定分岐点、データ取得部22から保全車両Hの角速度ω、並びに速度検出器11からの速度vがそれぞれ入力されて保全車両Hの走行経路の位置データ(データ採取時間間隔毎の位置データである)を取得する位置データ取得部41と、この位置データ取得部41で取得された推定分岐点に設けられている分岐器より分岐経路の終了点(線路情報にて予め分かっている)を検出する分岐経路終了点検出部42と、この分岐経路終了点検出部42で求められた終了点までの進行方向距離(分岐前本線方向に沿う距離で、走行方向距離ともいえる)の正規化を行う進行方向距離正規化部43と、同じく上記分岐経路終了点検出部42で求められた終了点までの幅方向距離(分岐前の本線と垂直方向距離)の正規化を行う幅方向距離正規化部44と、上記進行方向距離正規化部43で正規化された正規化走行曲線データを入力してニューラルネット手法を用いて振分け率を算出する振分け率算出部45と、この振分け率算出部45にて求められた振分け率を入力して予め入力されている比較用の正規の振分け率(実際に用いられている正確な振分け率)とを比較して最も近い振分け率を選択する(データマッチング)ことにより分岐器の振分け率(後述する)を決定する振分け率決定部46と、上記進行方向距離正規化部43で正規化された正規化走行曲線データを入力してニューラルネット手法を用いて番数を算出する番数算出部47と、この番数算出部47にて求められた番数を予め入力されている比較用の正規の番数(実際に用いられている正確な番数)とを比較して最も近い番数を選択する(データマッチング)ことにより分岐器の番数(後述する)を決定する番数決定部48と、上記各決定部46,48で求められた振分け率および番数を入力するとともに予め入力されている分岐器情報の中から当該振分け率と番数とに該当する分岐器すなわち分岐線番を判別する分岐線番判別部49とから構成されている。
【0033】
ここで、分岐器の構成について説明しておく。
分岐器は、現在走行している基準線路を左方向または右方向に離れていく分岐線路に分岐させるもので複数の種類が準備されている。分岐器の種類については、左右方向への分岐割合を示す振分け率と、基準線路に対する分岐線路の開き度合いを表わす番数とで区分けされている。
【0034】
振分け率については、左右への振分け率が、9:1,4:1,7:3,3:1,2:1,3:2などの種類が設けられている。
また、分岐形状については、片開き分岐(一方にだけ分岐)、両開き分岐(両側に等しい角度で分岐)、振分け分岐(左右に等しくない角度で分岐)などの種類がある。上述した振分け率の数値は、主に左方向に分岐する左片開き分岐の場合であり、そのため、左側の数値が大きい値にされているが、逆に、右方向に分岐する右片開き分岐の場合には、比率の右側の数値が大きい値にされる。すなわち、分岐の振分け率は、1:9,1:4,3:7,1:3,1:2,2:3にされる。図8に分岐の種類を示しておく。(a)は片開き分岐、(b)は両開き分岐、(c)は振分け分岐(7:3)の場合を示す。なお、片開き分岐は10:0の振分け分岐と考えることもでき、両開き分岐は5:5の振分け分岐と考えることができる。
【0035】
さらに、番数とは、分岐器における基準線路に対する分岐線路の開き度合(基準線路と分岐線路とのなす角度で、以下、分岐角という)を示すものである。簡単に言えば、基準線路から分岐線路が1m離れるのに必要な長さをメートルで表わしたものである。具体的には、片開き分岐の場合で、基準線路が分岐点(理論交点)から12m進んだ地点で分岐線路との離間距離(開き)が1mである場合に、12番分岐と呼ぶ。
【0036】
なお、番数nと分岐角θとの関係は下記(1)式にて表わされる(これは、両振分け分岐を基準とした式である)。
θ=2×tan−1(1/2n) ・・・(1)
また、振分け率mを考慮した場合における番数nと分岐角θとの関係を表わす簡易式は下記(2)式にて表わされる。
【0037】
θ=2×(m/10)×tan−1(1/2n) ・・・(2)
すなわち、mが10の場合は片開き分岐となり、mが5の場合は両開き分岐となり、mが1,2,3,4,6,7,8,9の場合が振分け分岐となる。
【0038】
次に、上記各算出部45,47での演算方法について説明する。
これら各算出部45,47では、現在走行している正規化された走行曲線データが入力されて、振分け率および番数がニューラルネット手法に基づく演算式により求められる。
【0039】
ところで、ニューラルネット手法における演算式、より具体的には、演算式のパラメータについては、予め、正規の振分け率基準曲線および番数基準曲線に基づき学習されており、以下、これら基準曲線について説明する。
【0040】
まず、振分け率基準曲線の求め方について説明する。
例えば、両開き分岐の場合、番数が異なる5種類(番数が、8,10,12,14,16の場合)の分岐線路(走行曲線)を描くと図9のようになる。この場合の離間距離は1mであるが、基準線路に対する離間距離である幅方向距離は0.5mとなる。
【0041】
次に、これらの分岐線路を走行方向距離でもって正規化すると、図10に示すように、全ての分岐線路は1本の曲線で表わされる。つまり、同じ振分け率の場合には、番数が異なっても、同一の曲線に集約されることになる。
【0042】
すなわち、分岐器で振り分けられた分岐線路を走行方向距離で正規化すると、図11に示すように、振分け率に応じた曲線(分岐パターン)が得られる。したがって、分岐器の種類に応じて得られる振分け率基準曲線とのデータマッチング(パターンマッチングとも言える)を行うことにより、現在、走行している分岐線路の振分け率を決定することができる。
【0043】
次に、番数基準曲線の求め方について説明する。
例えば、番数が8で、振分け率が異なる5種類(振分け率が、9:1,7:3,5:5,3:7,1:9の場合)の分岐線路を描くと図12のようになる。この場合の走行方向距離は全て16mであるのに対して、幅方向距離はそれぞれ振分け率に応じて、0.9,0.7,0.5,0.3,0.1mとなる。
【0044】
そして、このこれらの分岐線路を幅方向距離でもって正規化すると、図13に示すように、全ての分岐線路は1本の曲線で表わされる。つまり、同じ番数の場合には、振分け率が異なっても、同一の曲線に集約されることになる。
【0045】
すなわち、分岐器で振り分けられた分岐線路を幅方向距離で正規化すると、図14に示すように、番数に応じた曲線(番数パターン)が得られる。したがって、分岐器の種類に応じて得られる番数基準曲線とのデータマッチング(パターンマッチングとも言える)を行うことにより、現在、走行している分岐線路の番数を求めることができる。
【0046】
このように、求められた分岐線路の振分け率および番数から、通過した分岐器の種類、すなわち分岐器番号を判別することができる。
言い換えれば、予め、分岐器の種類毎に車両の走行方向距離を正規化して振分け率を特定し得る振分け率基準曲線と、分岐器の種類毎に車両の幅方向距離を正規化して番数を特定し得る番数基準曲線とを求めておくとともに、これらの基準曲線と実際に車両が走行している走行曲線とのデータマッチングを行うことにより、通過した分岐器の番号を検出することができる。すなわち、保全車両Hの現在の概略位置を用いることにより、現在走行している分岐線路を正確に検出することができる。
【0047】
ここで、ニューラルネット手法におけるデータマッチングの方法を、より具体的に説明する。
なお、ニューラルネットにおいては、通常、入力層、中間層、出力層が設けられるとともに、入力値と重み係数との積和が中間層に入力され、さらに中間層で得られた中間値と重み係数との積和が出力層に入力されて、出力値を得るようにされている。また、振分け率を求めるニューラルネットにおいては、振分け率を表わす1個の出力(ニューロン)が設けられ、番数を求めるニューラルネットにおいては、番数を表わす1個の出力(ニューロン)が設けられる。さらに、入力層においては、所定時間間隔での走行曲線の幅方向における位置データ(進行方向をx座標とした場合には、y座標データである)の採取位置に応じた個数分の入出力(ニューロン)が設けられる。なお、中間層においては、適当な個数分(例えば、入力の個数分程度)の入出力(ニューロン)が設けられているものとする。また、中間層および出力層の各ニューロンには、入力値から出力値を求めるための出力関数g,f(例えば、シグモイド関数が用いられる)が設けられており、それぞれの入力値に対して0と1の間の数値が出力される。
【0048】
そして、振分け率算出部45および番数算出部47で求められた数値が振分け率決定部46および番数決定部48に入力され、これら数値と正規の数値とが比較されて、最も近い数値が振分け率および番数として出力される。
【0049】
次に、ニューラルネット手法を用いた分岐線番の検出方法について説明する。
まず、速度と角速度とに基づく位置データから走行曲線(分岐線路)を求めた後、この走行曲線を正規化して正規化走行曲線を求める。
【0050】
そして、この正規化走行曲線を、予め、決められた距離間隔でもってその幅方向での位置(y座標)を抽出し、この抽出された位置データyiを入力層の各ニューロンに入力するとともにこれら各位置データに予め求められている各重み係数vjを掛けた値の合計、つまり積和(Σyi・vj)を求める。
【0051】
次に、この合計値が中間層のニューロンの出力関数gに入力されて、中間値ujが出力され、この中間値ujに重み係数ωkを掛けた値の合計、つまり積和(Σui・ωk)が上記と同様に、出力層のニューロンの出力関数fに入力されて、出力値okが出力される。なお、上述したように、分岐番数および振分け率は共に一次元であるため、出力層は一つである(k=1)。
【0052】
すなわち、走行曲線の所定距離間隔ごとのy座標データが振分け率算出部45に入力されると、ニューラルネットにより当該走行曲線の振分け率が求められた後、この数値が振分け率決定部46に入力されて最も近い振分け率が検出される。
【0053】
また、これと同時に、同じy座標データが番数算出部47に入力されると、ニューラルネットにより当該走行曲線の番数を表わす数値が求められた後、この数値が番数決定部48に入力されて最も近い番数が検出される。
【0054】
すなわち、ニューラルネット手法に基づき分岐器の種類が特定されることになる。
なお、上述したニューラルネット手法での演算の流れを、図15に示しておく。
ところで、上述したように、各算出部45,47では、ニューラルネット手法により、振分け率および番数を表わす数値が求められるが、この演算に用いられる重み係数などのパラメータについては、教師データに基づき学習が行われる。勿論、この学習を行う際には、教師データが用いられるとともに、この教師データと出力層における各出力値との差の最小となるように、例えば最急降下法により、重み係数(結合荷重)が修正されていく。すなわち、図7に示すように、これら各算出部45,47には、重み係数などのパラメータを修正するためのの振分け率学習部51および番数学習部52が具備されている。なお、これらの学習部51,52は、学習が済んだ時点で各算出部45,47から切り離される。つまり、この学習動作はオフラインで行われる。なお、図1に、これらの学習部51,52を纏めて学習手段50として記載している。
【0055】
次に、分岐点照合部27では、上記分岐点推定部25で推定された推定分岐点および上記分岐線番検出部26で検出された分岐線番が入力されて、予め入力されている線路情報(特に、分岐情報)の内容と照合して、その分岐点が正しいものかどうかが判定される。照合が正しい場合には、通過した分岐点番号、分岐線番が進行方向、時刻などと合わせて地図表示手段31側に送られ、地図上に保全車両Hの正確な現在位置が表示される。なお、分岐点照合部27で照合できなかった場合には、アラーム信号が地図表示手段31側に送られて、注意が喚起される。
【0056】
次に、保全車両が駅構内でどの分岐線に移動したかを検出する位置検出方法について、より具体的に説明する。
ここでは、図16に示すような駅構内での保全車両Hの位置を検出する場合について説明する。なお、以下の説明中、括弧内の頭にNが付く番号は線路番号を表わすものとする。
【0057】
図16に示すように、本線Aには左方向に分岐角θ1でもって分岐する第1分岐線B(N12)が設けられており、またこの第1分岐線Bには左方向に分岐角θ2でもって分岐する第2分岐線C(N122)が設けられている。
【0058】
上記保全車両Hの移動開始地点(走行開始地点)をPとして、保全車両Hが移動(走行)を開始すると、GPS計測機33からの概略位置が距離算出部21に入力されて保全車両Hの概略位置が検出されるとともに、速度検出器11からの速度vにより移動距離が算出される。
【0059】
また、角速度検出器12から角速度ωがデータ取得部22に入力されてその時間変化率である角加速度ω′が求められる。
そして、この角加速度ω′が角速度ωとともに進行方向推定部23に入力され、ここで上述したファジィルールに基づきその進行方向が推定される。
【0060】
一方、分岐信頼度曲線算出部24では概略位置が入力されるとともに次に通過する分岐器(分岐番号J(i))での分岐信頼度曲線(分岐ゾーンにおける分岐点からの距離に逆比例する値、つまり分岐点に近い方が高く、分岐ゾーンの境界に近くなると低くなるような正規分布曲線)Sが算出されて分岐点推定部25に入力される。
【0061】
分岐点推定部25では、距離算出部21から概略位置および正確な移動距離が入力されるとともに、進行方向推定部23からは進行方向が入力され、分岐信頼度曲線Sに基づき分岐信頼度が所定の閾値(例えば、20%)βを超えた場合に入力された進行方向に分岐したと推定され、そしてこの分岐した地点すなわち分岐点番号および進行方向が出力される。なお、左方向または右方向に分岐した場合には、分岐信頼度が閾値βを超えた時点で分岐方向を推定し得るが、直進については、分岐ゾーンZを通過した時点で直進したことが推定される。
【0062】
次に、この分岐点推定部25で求められた推定分岐点および進行方向並びにデータ取得部22から保全車両Hの角速度ω、速度検出器11から保全車両Hの速度vが分岐線番検出部26に入力される。
【0063】
この分岐線番検出部26では、上述したように、走行曲線つまり分岐線路が求められた後、正規化されて、予め求められている基準曲線とのデータマッチングにより、分岐線路の振分け率および番数が求められて、通過した分岐器つまり現在走行している分岐線路が検出される。
【0064】
そして、分岐点推定部25で推定された分岐点番号および分岐線番検出部26で検出された分岐線番が分岐点照合部27に入力されて、予め入力されている線路情報に基づき、それぞれ、通過した分岐点および分岐方向の線路である分岐線番に一致するか否かが照合される。
【0065】
例えば、第1分岐点J1で左方向に分岐した後、第2分岐点J2で左方向に通過した場合について説明する。
第1分岐点J1の通過時は、進行方向推定部23から「左方向」が分岐点推定部25に入力されるとともに、保全車両Hの距離が、対応する分岐信頼度曲線の閾値βを超えた場合に、第1分岐点J1を左方向に分岐したものと推定され、その推定分岐点番号J1および分岐線番B(N12)が出力される。なお、保全車両Hが直進した場合には、第1分岐点J1の分岐ゾーンZを出た瞬間にそのことが分かり、同様に、分岐点番号J1および分岐線番A(N11)が出力される。
【0066】
そして、分岐点推定部25から出力された推定分岐点番号J1および分岐線番検出部26から出力された分岐線番B(N12)が分岐点照合部27に入力されて、ここで予め入力されている線路情報に一致するか否かが判断される。これらの照合が済むと、その線路情報が地図表示手段31に出力され、保全車両Hの現在位置が地図上に表示される。
【0067】
さらに、保全車両Hが分岐線番B(N12)を走行して第2分岐点J2を左方向に分岐した場合も同様に、その分岐点番号J2および分岐線番C(N122)が出力され、分岐器の照合を経た後、保全車両Hの現在位置が地図上に表示される。
【0068】
上述したように、保全車両が本線から分岐線に分岐した場合には、距離算出部にて得られる保全車両の移動距離およびGPS測位データにより概略位置が分かり、また鉄道車両の角速度および角加速度に基づくファジィルールによりその進行方向が推定されるとともに分岐点についても推定され、そしてこの推定分岐点が分岐線番検出部に入力され、ここで、ニューラルネット手法により、分岐器の特徴である振分け率および番数が求められて正確な分岐線番が検出される。すなわち、従来のように、GPS測位データを用いて現在走行している線路を特定するシステムに比べて、概略の位置情報を用いるだけで、例えば駅構内における近接する分岐線同士であっても、保全車両の現在位置を正確に検出することができる。
【0069】
特に、ニューラルネット手法においては、分岐した線路の位置データ、すなわち走行曲線を、車両の進行方向距離および幅方向距離にて正規化した正規化曲線と、予め設置された分岐器の種類毎に、正規化された基準曲線とのデータマッチングを行うようにしたので、容易且つ迅速に、走行曲線すなわち分岐線路を検出(特定)することができる。
【0070】
ところで、上述した鉄道用保全車両の位置検出方法を工程形式にて記載すると以下のようになる。
すなわち、この位置検出方法は、鉄道車両の概略位置を検出し得るGPS計測機と、鉄道車両の速度を検出する速度検出器と、鉄道車両に設けられて当該鉄道車両の進行方向での角速度を検出する角速度検出器とが具備された鉄道車両の位置を検出する方法であって、
上記速度検出器で検出された速度を入力して移動距離を算出するとともに当該移動距離および上記GPS計測機により得られた移動開始位置に基づき地図上での鉄道車両の概略位置を算出し得る距離算出工程と、上記角速度検出器で検出された角速度を入力して鉄道車両の進行方向での角加速度を求めるデータ取得工程と、上記データ取得工程からの角加速度および鉄道車両の角速度を用いてその進行方向をファジィ推論により推定する進行方向推定工程と、上記距離算出工程で算出された移動距離および概略位置を入力するとともに分岐信頼度曲線に基づき分岐点を推定する分岐点推定工程と、この分岐点推定行程で求められた推定分岐点並びに鉄道車両の角速度および速度を入力してニューラルネット手法を用いて鉄道車両が走行している分岐線番を検出する分岐線番検出工程と、上記分岐点推定工程で求められた推定分岐点および上記分岐線番検出工程で検出された分岐線番を入力して予め備えられた線路情報に合致するか否かを照合する分岐点照合工程とを具備した方法であり、
また上記進行方向推定工程において、角速度および角加速度に基づくファジィルールを用いて、鉄道車両の進行方向を、左方向、右方向および直進のいずれかを推定する方法であり、
さらに上記分岐線番検出工程において、
推定分岐点、鉄道車両の角速度および速度が入力されて鉄道車両の位置データである走行曲線を取得し、この取得された走行曲線を進行方向距離および幅方向距離にて正規化し、これら正規化された正規化曲線データを入力してニューラルネット手法を用いて振分け率および番数を算出し、これら求められた振分け率および番数を入力して予め入力されている基準振分け率および基準番数と比較して最も近い基準振分け率および基準番数を選択することにより分岐器の振分け率および番数を決定し、これら決定された振分け率および番数に基づき、予め入力されている分岐器情報の中から当該振分け率および番数に該当する分岐器における分岐線番を判別する方法である。
【符号の説明】
【0071】
1 位置検出装置
11 速度検出器
12 角速度検出器
13 線路情報記憶部
21 距離算出部
22 データ取得部
23 進行方向推定部
24 分岐信頼度曲線算出部
25 分岐点推定部
26 分岐線番検出部
27 分岐点照合部
31 地図表示手段
33 GPS計測機
41 位置データ取得部
42 分岐経路終了点検出部
43 走行方向距離正規化部
44 幅方向距離正規化部
45 振分け率算出部
46 振分け率決定部
47 番数算出部
48 番数決定部
49 分岐線番判別部
【特許請求の範囲】
【請求項1】
鉄道車両の位置を検出する装置であって、鉄道車両の概略位置を検出し得るGPS計測機と、鉄道車両の速度を検出する速度検出器と、鉄道車両に設けられて当該鉄道車両の進行方向での角速度を検出する角速度検出器と、上記速度検出器で検出された速度を入力して移動距離を算出するとともに当該移動距離および上記GPS計測機により得られた移動開始位置に基づき地図上での鉄道車両の概略位置を算出し得る距離算出部と、上記角速度検出器で検出された角速度を入力して鉄道車両の進行方向での角加速度を求めるデータ取得部と、このデータ取得部からの角加速度および鉄道車両の角速度を用いてその進行方向をファジィ推論により推定する進行方向推定部と、上記距離算出部で算出された移動距離および概略位置を入力するとともに分岐信頼度曲線に基づき分岐点を推定する分岐点推定部と、この分岐点推定部で求められた推定分岐点並びに鉄道車両の角速度および速度を入力してニューラルネット手法を用いて鉄道車両が走行している分岐線番を検出する分岐線番検出部と、上記分岐点推定部で求められた推定分岐点および上記分岐線番検出部で求められた分岐線番を入力して予め備えられた線路情報に合致するか否かを照合する分岐点照合部とを具備したことを特徴とする鉄道車両の位置検出装置。
【請求項2】
進行方向推定部において、角速度および角加速度に基づくファジィルールを用いて、鉄道車両の進行方向を、左方向、右方向および直進のいずれかを推定するようにしたことを特徴とする請求項1に記載の鉄道車両の位置検出装置。
【請求項3】
分岐線番検出部を、
推定分岐点、角速度検出器からの角速度、および速度検出器からの速度が入力されて鉄道車両の位置データである走行曲線を取得する位置データ取得部と、この位置データ取得部で取得された走行曲線を進行方向距離にて正規化する進行方向距離正規化部と、上記走行曲線を幅方向距離にて正規化する幅方向距離正規化部と、上記進行方向距離正規化部で正規化された正規化曲線データを入力してニューラルネット手法を用いて振分け率を算出する振分け率算出部と、この振分け率算出部にて求められた振分け率を入力して予め入力されている基準振分け率と比較して最も近い基準振分け率を選択することにより分岐器の振分け率を決定する振分け率決定部と、上記幅方向距離正規化部で正規化された正規化曲線データを入力してニューラルネット手法を用いて番数を算出する番数算出部と、この番数算出部にて求められた番数を入力して予め入力されている基準番数と比較して最も近い基準番数を選択することにより分岐器の番数を決定する番数決定部と、上記各決定部で決定された振分け率および番数を入力するとともに予め入力されている分岐器情報の中から当該振分け率および番数に該当する分岐器における分岐線番を判別する分岐線番判別部とから構成したことを特徴とする請求項1または2に記載の鉄道車両の位置検出装置。
【請求項4】
鉄道車両の概略位置を検出し得るGPS計測機と、鉄道車両の速度を検出する速度検出器と、鉄道車両に設けられて当該鉄道車両の進行方向での角速度を検出する角速度検出器とが具備された鉄道車両の位置を検出する方法であって、
上記速度検出器で検出された速度を入力して移動距離を算出するとともに当該移動距離および上記GPS計測機により得られた移動開始位置に基づき地図上での鉄道車両の概略位置を算出し得る距離算出工程と、上記角速度検出器で検出された角速度を入力して鉄道車両の進行方向での角加速度を求めるデータ取得工程と、上記データ取得工程からの角加速度および鉄道車両の角速度を用いてその進行方向をファジィ推論により推定する進行方向推定工程と、上記距離算出工程で算出された移動距離および概略位置を入力するとともに分岐信頼度曲線に基づき分岐点を推定する分岐点推定工程と、この分岐点推定行程で求められた推定分岐点並びに鉄道車両の角速度および速度を入力してニューラルネット手法を用いて鉄道車両が走行している分岐線番を検出する分岐線番検出工程と、上記分岐点推定工程で求められた推定分岐点および上記分岐線番検出工程で検出された分岐線番を入力して予め備えられた線路情報に合致するか否かを照合する分岐点照合工程とを具備したことを特徴とする鉄道車両の位置検出方法。
【請求項5】
進行方向推定工程において、角速度および角加速度に基づくファジィルールを用いて、鉄道車両の進行方向を、左方向、右方向および直進のいずれかを推定することを特徴とする請求項4に記載の鉄道車両の位置検出方法。
【請求項6】
分岐線番検出工程において、
推定分岐点、鉄道車両の角速度および速度が入力されて鉄道車両の位置データである走行曲線を取得し、この取得された走行曲線を進行方向距離および幅方向距離にて正規化し、これら正規化された正規化曲線データを入力してニューラルネット手法を用いて振分け率および番数を算出し、これら求められた振分け率および番数を入力して予め入力されている基準振分け率および基準番数と比較して最も近い基準振分け率および基準番数を選択することにより分岐器の振分け率および番数を決定し、これら決定された振分け率および番数に基づき、予め入力されている分岐器情報の中から当該振分け率および番数に該当する分岐器における分岐線番を判別することを特徴とする請求項4または5に記載の鉄道車両の位置検出方法。
【請求項1】
鉄道車両の位置を検出する装置であって、鉄道車両の概略位置を検出し得るGPS計測機と、鉄道車両の速度を検出する速度検出器と、鉄道車両に設けられて当該鉄道車両の進行方向での角速度を検出する角速度検出器と、上記速度検出器で検出された速度を入力して移動距離を算出するとともに当該移動距離および上記GPS計測機により得られた移動開始位置に基づき地図上での鉄道車両の概略位置を算出し得る距離算出部と、上記角速度検出器で検出された角速度を入力して鉄道車両の進行方向での角加速度を求めるデータ取得部と、このデータ取得部からの角加速度および鉄道車両の角速度を用いてその進行方向をファジィ推論により推定する進行方向推定部と、上記距離算出部で算出された移動距離および概略位置を入力するとともに分岐信頼度曲線に基づき分岐点を推定する分岐点推定部と、この分岐点推定部で求められた推定分岐点並びに鉄道車両の角速度および速度を入力してニューラルネット手法を用いて鉄道車両が走行している分岐線番を検出する分岐線番検出部と、上記分岐点推定部で求められた推定分岐点および上記分岐線番検出部で求められた分岐線番を入力して予め備えられた線路情報に合致するか否かを照合する分岐点照合部とを具備したことを特徴とする鉄道車両の位置検出装置。
【請求項2】
進行方向推定部において、角速度および角加速度に基づくファジィルールを用いて、鉄道車両の進行方向を、左方向、右方向および直進のいずれかを推定するようにしたことを特徴とする請求項1に記載の鉄道車両の位置検出装置。
【請求項3】
分岐線番検出部を、
推定分岐点、角速度検出器からの角速度、および速度検出器からの速度が入力されて鉄道車両の位置データである走行曲線を取得する位置データ取得部と、この位置データ取得部で取得された走行曲線を進行方向距離にて正規化する進行方向距離正規化部と、上記走行曲線を幅方向距離にて正規化する幅方向距離正規化部と、上記進行方向距離正規化部で正規化された正規化曲線データを入力してニューラルネット手法を用いて振分け率を算出する振分け率算出部と、この振分け率算出部にて求められた振分け率を入力して予め入力されている基準振分け率と比較して最も近い基準振分け率を選択することにより分岐器の振分け率を決定する振分け率決定部と、上記幅方向距離正規化部で正規化された正規化曲線データを入力してニューラルネット手法を用いて番数を算出する番数算出部と、この番数算出部にて求められた番数を入力して予め入力されている基準番数と比較して最も近い基準番数を選択することにより分岐器の番数を決定する番数決定部と、上記各決定部で決定された振分け率および番数を入力するとともに予め入力されている分岐器情報の中から当該振分け率および番数に該当する分岐器における分岐線番を判別する分岐線番判別部とから構成したことを特徴とする請求項1または2に記載の鉄道車両の位置検出装置。
【請求項4】
鉄道車両の概略位置を検出し得るGPS計測機と、鉄道車両の速度を検出する速度検出器と、鉄道車両に設けられて当該鉄道車両の進行方向での角速度を検出する角速度検出器とが具備された鉄道車両の位置を検出する方法であって、
上記速度検出器で検出された速度を入力して移動距離を算出するとともに当該移動距離および上記GPS計測機により得られた移動開始位置に基づき地図上での鉄道車両の概略位置を算出し得る距離算出工程と、上記角速度検出器で検出された角速度を入力して鉄道車両の進行方向での角加速度を求めるデータ取得工程と、上記データ取得工程からの角加速度および鉄道車両の角速度を用いてその進行方向をファジィ推論により推定する進行方向推定工程と、上記距離算出工程で算出された移動距離および概略位置を入力するとともに分岐信頼度曲線に基づき分岐点を推定する分岐点推定工程と、この分岐点推定行程で求められた推定分岐点並びに鉄道車両の角速度および速度を入力してニューラルネット手法を用いて鉄道車両が走行している分岐線番を検出する分岐線番検出工程と、上記分岐点推定工程で求められた推定分岐点および上記分岐線番検出工程で検出された分岐線番を入力して予め備えられた線路情報に合致するか否かを照合する分岐点照合工程とを具備したことを特徴とする鉄道車両の位置検出方法。
【請求項5】
進行方向推定工程において、角速度および角加速度に基づくファジィルールを用いて、鉄道車両の進行方向を、左方向、右方向および直進のいずれかを推定することを特徴とする請求項4に記載の鉄道車両の位置検出方法。
【請求項6】
分岐線番検出工程において、
推定分岐点、鉄道車両の角速度および速度が入力されて鉄道車両の位置データである走行曲線を取得し、この取得された走行曲線を進行方向距離および幅方向距離にて正規化し、これら正規化された正規化曲線データを入力してニューラルネット手法を用いて振分け率および番数を算出し、これら求められた振分け率および番数を入力して予め入力されている基準振分け率および基準番数と比較して最も近い基準振分け率および基準番数を選択することにより分岐器の振分け率および番数を決定し、これら決定された振分け率および番数に基づき、予め入力されている分岐器情報の中から当該振分け率および番数に該当する分岐器における分岐線番を判別することを特徴とする請求項4または5に記載の鉄道車両の位置検出方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−13261(P2013−13261A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−145054(P2011−145054)
【出願日】平成23年6月30日(2011.6.30)
【出願人】(000005119)日立造船株式会社 (764)
【出願人】(590003825)北海道旅客鉄道株式会社 (94)
【出願人】(599142590)北海道ジェイ・アール・サイバネット株式会社 (14)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月30日(2011.6.30)
【出願人】(000005119)日立造船株式会社 (764)
【出願人】(590003825)北海道旅客鉄道株式会社 (94)
【出願人】(599142590)北海道ジェイ・アール・サイバネット株式会社 (14)
【Fターム(参考)】
[ Back to top ]