
鉄道車両用制振装置

【課題】車体における乗り心地を悪化させることがなく、経済性に優れる鉄道車両用制振装置を提供する。
【解決手段】シリンダ2と、シリンダ2内に摺動自在に挿入されるピストン3と、シリンダ3内に挿入されてピストン3に連結されるロッド4と、シリンダ2内にピストン3で区画したロッド側室5とピストン側室6と、タンク7と、ロッド側室5とピストン側室6とを連通する第一通路8の途中に設けた第一開閉弁9と、ピストン側室6とタンク7とを連通する第二通路10の途中に設けた第二開閉弁11と、予め決められた通常回転速度にて回転駆動されてタンク7からロッド側室5へ液体を供給するポンプ12とを有するアクチュエータAf,Arを備え車体の振動を抑制する鉄道車両用制振装置1において、モータ15の目標回転速度と実際の回転速度の速度偏差に基づいて、区間種類が明り区間であるかトンネル区間を判断する区間判断手段を備えた。
【解決手段】シリンダ2と、シリンダ2内に摺動自在に挿入されるピストン3と、シリンダ3内に挿入されてピストン3に連結されるロッド4と、シリンダ2内にピストン3で区画したロッド側室5とピストン側室6と、タンク7と、ロッド側室5とピストン側室6とを連通する第一通路8の途中に設けた第一開閉弁9と、ピストン側室6とタンク7とを連通する第二通路10の途中に設けた第二開閉弁11と、予め決められた通常回転速度にて回転駆動されてタンク7からロッド側室5へ液体を供給するポンプ12とを有するアクチュエータAf,Arを備え車体の振動を抑制する鉄道車両用制振装置1において、モータ15の目標回転速度と実際の回転速度の速度偏差に基づいて、区間種類が明り区間であるかトンネル区間を判断する区間判断手段を備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、鉄道車両用制振装置の改良に関する。
【背景技術】
【0002】
従来、この種の鉄道車両用制振装置にあっては、たとえば、鉄道車両に車体の進行方向に対して左右方向の振動を抑制すべく、車体と台車との間に介装されて使用されるものが知られている。
【0003】
より詳しくは、この鉄道車両用制振装置は、鉄道車両の台車と車体の一方に連結されるシリンダと、当該シリンダ内に摺動自在に挿入されるピストンと、シリンダ内に挿入されてピストンと台車と車体の他方に連結されるロッドと、シリンダ内にピストンで区画したロッド側室とピストン側室と、タンクと、ロッド側室とピストン側室とを連通する第一通路の途中に設けた第一開閉弁と、ピストン側室とタンクとを連通する第二通路の途中に設けた第二開閉弁と、ロッド側室へ液体を供給するポンプと、ロッド側室を上記タンクへ接続する排出通路と、当該排出通路の途中に設けられ開弁圧を変更可能な可変リリーフ弁とを備えており、上記したポンプ、第一開閉弁、第二開閉弁および可変リリーフ弁を駆動することで、伸縮双方へ推力を発揮することができ、この推力で車体の振動を抑制するようになっている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−65797号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そして、鉄道車両用制振装置は、アクチュエータの発生すべき推力を推力指令値として求め、アクチュエータの推力を推力指令値通りに制御するようにして、車体の振動を抑制するようにしている。
【0006】
この推力指令値には、制御ゲインを用いて求める等とされる。たとえば、スカイフック制御の場合、制御ゲインであるスカイフックゲインを車体の横方向の速度に乗じることで推力指令値が求められる。このように、推力指令値を求める際には、加速度や速度等を検知して、これに制御ゲインを乗じることで推力指令値を求めるのである。
【0007】
一方、鉄道車両は、一回の営業走行で明り区間(非トンネル区間)とトンネル区間を含む路線を走行しなくてはならない場合がほとんどであり、明り区間とトンネル区間では車体の振動モードが異なるため、一回の営業走行で振動モードが異なる区間を走行しなければならない。また、明り区間内であっても直線区間と曲線区間では車体の振動状況が異なる。
【0008】
したがって、上記制御ゲインを一定のまま、推力指令値を求めてアクチュエータを制御すると、推力指令値が振動モードに適したものとならず、車体の振動を効果的に抑制できずに、乗心地を良好に保つことができない悪化させてしまう場合がある。そこで、従来の鉄道車両用制振装置では、鉄道車両の車両モニタ装置等から鉄道車両の走行中の区間がどのような区間であるかの情報や走行位置の情報を得て、これらと制御ゲインとを関連付けるテーブルを参照して、最適な制御ゲインを選択するようにしていた。
【0009】
このように車両モニタ装置等から鉄道車両が走行中の区間種類や走行位置といった情報を得るためには、鉄道車両用制振装置を車両モニタ装置に接続するためのインターフェースが必要であり、また、在来線のように車両情報伝送設備の整っていない鉄道車両については、上記情報を得ることができず鉄道車両用制振装置を搭載することが難しいといった問題がある。
【0010】
そこで、本発明は上記不具合を改善するために創案されたものであって、その目的とするところは、鉄道車両側から走行位置情報や走行中の区間種類情報を得ることなく、鉄道車両の走行中の区間種類を判断することができる鉄道車両用制振装置を提供することである。
【課題を解決するための手段】
【0011】
上記した目的を達成するため、本発明の課題解決手段は、鉄道車両の台車と車体の一方に連結されるシリンダと、当該シリンダ内に摺動自在に挿入されるピストンと、上記シリンダ内に挿入されて上記ピストンと上記台車と車体の他方に連結されるロッドと、上記シリンダ内に上記ピストンで区画したロッド側室とピストン側室と、タンクと、上記ロッド側室と上記ピストン側室とを連通する第一通路の途中に設けた第一開閉弁と、上記ピストン側室と上記タンクとを連通する第二通路の途中に設けた第二開閉弁と、上記タンクから上記ロッド側室へ液体を供給するポンプと、当該ポンプを駆動するモータとを有するアクチュエータを備え、上記モータを一定の回転速度で駆動し、当該アクチュエータに出力させるべき推力を推力指令値として求め、上記アクチュエータを制御して車体の振動を抑制する鉄道車両用制振装置において、上記モータの目標回転速度と実際の回転速度の速度偏差に基づいて、上記鉄道車両の走行中の区間種類が明り区間であるかトンネル区間を判断する区間判断手段を備えたこと特徴とする。
【発明の効果】
【0012】
本発明の鉄道車両用制振装置によれば、区間判断手段がモータの目標回転速度と実際の回転速度の速度偏差に基づいて、鉄道車両の走行中の区間種類が明り区間であるかトンネル区間を判断するようになっているから、車両モニタ装置等の他の機器から鉄道車両の走行位置情報や区間種類情報を得ずとも区間種類を判断することができる。
【0013】
したがって、鉄道車両用制振装置によれば、車両モニタ装置等の他の機器から鉄道車両の走行位置情報や区間種類情報を得る必要がないので、車両モニタ装置等に接続するためのインターフェースが不要となり、在来線のように車両情報伝送設備の整っていない鉄道車両であっても容易に搭載することができる。
【図面の簡単な説明】
【0014】
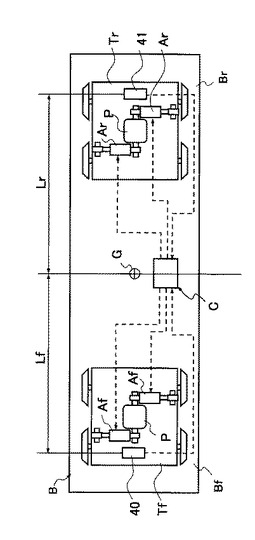
【図1】一実施の形態における鉄道車両用制振装置を搭載した鉄道車両の平面図である。
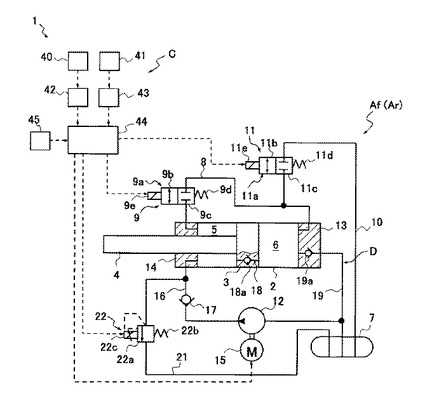
【図2】一実施の形態の鉄道車両用制振装置におけるアクチュエータの詳細図である。
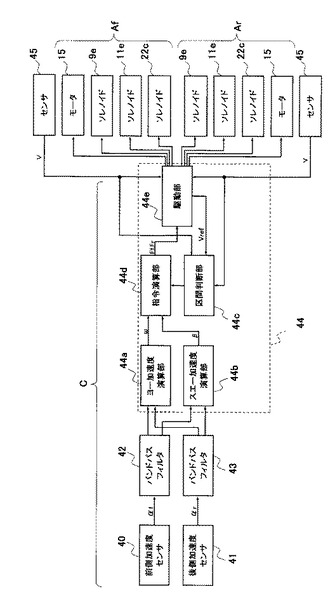
【図3】一実施の形態の鉄道車両用制振装置におけるコントローラの制御ブロック図である。
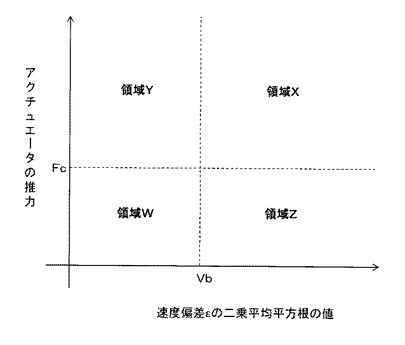
【図4】区間判断手段における区間種類の判断内容を説明するための図である。
【図5】一実施の形態の鉄道車両用制振装置におけるコントローラの指令演算部の制御ブロック図である。
【発明を実施するための形態】
【0015】
以下、図に示した実施の形態に基づき、本発明を説明する。一実施の形態における鉄道車両用制振装置1は、鉄道車両の車体Bの制振装置として使用され、図1に示すように、前側の台車Tfと車体Bとの間に対として介装される前側のアクチュエータAfと、後側の台車Trと車体Bとの間に介装される後側のアクチュエータArと、これら両方のアクチュエータAf,Arをアクティブ制御するコントローラCとを備えて構成されている。アクチュエータAf,Arは、詳細には、鉄道車両の場合、車体Bの下方に垂下されるピンPに連結され、車体Bと前後の台車Tf,Trとの間で対を成して並列に介装されている。
【0016】
そして、これら前後のアクチュエータAf,Arは、基本的には、アクティブ制御で車体Bの車両進行方向に対して水平横方向の振動を抑制するようになっており、この場合、コントローラCは、前後のアクチュエータAf,Arを制御して上記車体Bの横方向の振動を抑制するようになっている。
【0017】
コントローラCは、本実施の形態にあっては、車体Bの振動を抑制する制御を行う際に、車体Bの車体の前部Bfの車両進行方向に対して水平横方向の横方向加速度αfと、車体Bの車体の後部Brの車両進行方向に対して水平横方向の横方向加速度αrとを検知し、これらの横方向加速度αfと横方向加速度αrに基づいて前後の台車Tf,Trの直上における車体中心G周りの角加速度であるヨー加速度ωを求めるとともに、横方向加速度αfと横方向加速度αrに基づいて車体Bの中心Gの水平横方向の加速度であるスエー加速度βを求め、ヨー加速度ωとスエー加速度βに基づいて、前後のアクチュエータAf,Arで個々に発生すべき推力である推力指令値Ff,Frを求め、当該推力指令値Ff,Fr通りの推力を前後のアクチュエータAf,Arに発生させるべくフィードバック制御することで車体Bの上記横方向の振動を抑制するようになっている。
【0018】
つづいて、前後のアクチュエータAf,Arの具体的な構成について説明する。これらアクチュエータAf,Arは、同じ構成であるので、説明の重複を避けるため、便宜上、前側のアクチュエータAfの構成のみを説明し、後側のアクチュエータArについての具体的な説明を省略することとする。なお、図示したところでは、アクチュエータAfもアクチュエータArも二つずつ設けられているが、各アクチュエータAf,Arの一つに対して一つのコントローラCを設けることも可能である。
【0019】
アクチュエータAfは、図2に示すように、鉄道車両の台車Tfと車体Bの一方に連結されるシリンダ2と、シリンダ2内に摺動自在に挿入されるピストン3と、シリンダ2内に挿入されてピストン3と台車Tfと車体Bの他方に連結されるロッド4と、シリンダ2内にピストン3で区画したロッド側室5とピストン側室6と、タンク7と、ロッド側室5とピストン側室6とを連通する第一通路8の途中に設けた第一開閉弁9と、ピストン側室6とタンク7とを連通する第二通路10の途中に設けた第二開閉弁11と、タンク7からロッド側室5へ液体を供給するポンプ12と、当該ポンプ12を駆動するモータ15とを備えており、片ロッド型のアクチュエータとして構成されている。また、上記ロッド側室5とピストン側室6には液体が充填されるとともに、タンク7には、液体のほかに気体が充填されている。なお、タンク7内は、特に、気体を圧縮して充填することによって加圧状態とする必要は無い。
【0020】
そして、基本的には、第一開閉弁9で第一通路8を連通状態とするとともに第二開閉弁11を閉じた状態でポンプ12を駆動することで、このアクチュエータAfを伸長作動させることができ、第二開閉弁11で第二通路10を連通状態とするとともに第一開閉弁9を閉じた状態でポンプ12を駆動することで、アクチュエータAfを収縮作動させることができるようになっている。
【0021】
以下、アクチュエータAfの各部について詳細に説明する。シリンダ2は筒状であって、その図2中右端は蓋13によって閉塞され、図2中左端には環状のロッドガイド14が取り付けられている。また、上記ロッドガイド14内には、シリンダ2内に移動自在に挿入されるロッド4が摺動自在に挿入されている。このロッド4は、一端をシリンダ2外へ突出させており、シリンダ2内の他端を同じくシリンダ2内に摺動自在に挿入されているピストン3に連結してある。
【0022】
なお、ロッド4の外周とシリンダ2との間は図示を省略したシール部材によってシールされており、これによりシリンダ2内は密閉状体に維持されている。そして、シリンダ2内にピストン3によって区画されるロッド側室5とピストン側室6には、上述のように液体が充填されている。
【0023】
また、このアクチュエータAfの場合、ロッド4の断面積をピストン3の断面積の二分の一にして、ピストン3のロッド側室5側の受圧面積がピストン側室6側の受圧面積の二分の一となるようになっており、伸長作動時と収縮作動時とでロッド側室5の圧力を同じくすると、伸縮の双方で発生される推力が等しくなるようになっており、アクチュエータAfの変位量に対する液体量も伸縮両側で同じとなる。
【0024】
詳しくは、アクチュエータAfを伸長作動させる場合、ロッド側室5とピストン側室6を連通させた状態となってロッド側室5内とピストン側室6内の圧力が等しくなって、ピストン3におけるロッド側室5側とピストン側室6側の受圧面積差に上記圧力を乗じた推力を発生し、反対に、アクチュエータAfを収縮作動させる場合、ロッド側室5とピストン側室6との連通が断たれてピストン側室6をタンク7に連通させた状態となるので、ロッド側室5内の圧力とピストン3におけるロッド側室5側の受圧面積を乗じた推力を発生することになり、アクチュエータAfの発生推力は伸縮の双方でピストン3の断面積の二分の一にロッド側室5の圧力を乗じた値となるのである。したがって、このアクチュエータAfの推力を制御する場合、伸長作動、収縮作動共に、ロッド側室5の圧力を制御すればよいが、ピストン3のロッド側室5側の受圧面積をピストン側室6側の受圧面積の二分の一に設定しているので、伸縮両側で同じ推力を発生する場合に伸長側と収縮側でロッド側室5の圧力が同じとなって制御が簡素となり、加えて変位量に対する液体量も同じとなるので伸縮両側で応答性が同じとなる利点がある。なお、ピストン3のロッド側室5側の受圧面積をピストン側室6側の受圧面積の二分の一に設定しない場合にあっても、ロッド側室5の圧力でアクチュエータAfの伸縮両側の推力の制御をすることができる点は変わらない。
【0025】
戻って、ロッド4の図2中左端とシリンダ2の右端を閉塞する蓋13には、図示しない取付部を備えており、このアクチュエータAfを鉄道車両における車体Bと台車Tfとの間に介装することができるようになっている。
【0026】
そして、ロッド側室5とピストン側室6とは、第一通路8によって連通されており、この第一通路8の途中には、第一開閉弁9が設けられている。この第一通路8は、シリンダ2外でロッド側室5とピストン側室6とを連通しているが、ピストン3に設けられてもよい。
【0027】
第一開閉弁9は、この実施の形態の場合、電磁開閉弁とされており、第一通路8を開放してロッド側室5とピストン側室6とを連通する連通ポジション9bと、ロッド側室5とピストン側室6との連通を遮断する遮断ポジション9cとを備えたバルブ9aと、遮断ポジション9cを採るようにバルブ9aを附勢するバネ9dと、通電時にバルブ9aをバネ9dに対向して連通ポジション9bに切換えるソレノイド9eとを備えて構成されている。
【0028】
つづいて、ピストン側室6とタンク7とは、第二通路10によって連通されており、この第二通路10の途中には、第二開閉弁11が設けられている。第二開閉弁11は、この実施の形態の場合、電磁開閉弁とされており、第二通路10を開放してピストン側室6とタンク7とを連通する連通ポジション11bと、ピストン側室6とタンク7との連通を遮断する遮断ポジション11cとを備えたバルブ11aと、遮断ポジション11cを採るようにバルブ11aを附勢するバネ11dと、通電時にバルブ11aをバネ11dに対向して連通ポジション11bに切換えるソレノイド11eとを備えて構成されている。
【0029】
ポンプ12は、モータ15によって駆動されるようになっており、ポンプ12は、一方向のみに液体を吐出するポンプとされており、その吐出口は供給通路16によってロッド側室5へ連通され、吸込口はタンク7に通じて、モータ15によって駆動されると、タンク7から液体を吸込んでロッド側室5へ液体を供給する。
【0030】
上述のようにポンプ12は、一方向のみに液体を吐出するのみで回転方向の切換動作がないので、回転切換時に吐出量が変化するといった問題は皆無であり、安価なギアポンプ等を使用することができる。さらに、ポンプ12の回転方向が常に同一方向であるので、ポンプ12を駆動する駆動源であるモータ15にあっても回転切換に対する高い応答性が要求されず、その分、モータ15も安価なものを使用することができる。なお、供給通路16の途中には、ロッド側室5からポンプ12への液体の逆流を阻止する逆止弁17を設けてある。
【0031】
このアクチュエータAfにあっては、モータ15を一定の回転速度で駆動して、ポンプ12を定速回転させ一定流量の液体を吐出させ、当該液体をロッド側室5へ供給するようにしてある。そして、アクチュエータAfを伸長作動させる際には、第一開閉弁9を開きつつ第二開閉弁11を開閉させることによってロッド側室5内の圧力を調節し、逆に収縮作動させる際には第二開閉弁11を開きつつ第一開閉弁9を開閉させることによってロッド側室5内の圧力を調節することで、上記した推力指令値Ffが指示する通りの推力を得ることが可能である。伸長作動時には、ロッド側室5とピストン側室6とが連通状態におかれ、ピストン側室6内の圧力はロッド側室5の圧力と同じとなるため、このアクチュエータAfにあっては、伸長作動時も収縮作動時もロッド側室5の圧力をコントロールすることで推力をコントロールすることができる。なお、第一開閉弁9および第二開閉弁11は、開弁圧を調節可能であって開閉機能を備えた可変リリーフ弁とされてもよい。この場合には、第一開閉弁9或いは第二開閉弁11を伸縮作動時に開閉作動させるのではなく、開弁圧を調節することでアクチュエータAfの推力を調節することも可能である。
【0032】
上記のように、アクチュエータAfの推力調節が可能ではあるが、より簡単に推力調節が可能なように、本実施の形態の鉄道車両用制振装置1にあっては、ロッド側室5とタンク7とを接続する排出通路21と、この排出通路21の途中に設けた開弁圧を変更可能な可変リリーフ弁22とを設けている。
【0033】
可変リリーフ弁22は、この実施の形態では、比例電磁リリーフ弁とされており、排出通路21の途中に設けた弁体22aと、排出通路21を遮断するように弁体22aを附勢するバネ22bと、通電時にバネ22bに対向する推力を発生する比例ソレノイド22cとを備えて構成され、比例ソレノイド22cに流れる電流量を調節することで開弁圧を調節することができるようになっている。
【0034】
この可変リリーフ弁22は、弁体22aに作用させる排出通路21の上流となるロッド側室5の圧力がリリーフ圧(開弁圧)を超えると、当該排出通路21を開放させる方向に弁体22aを推す上記圧力に起因する推力と比例ソレノイド22cによる推力との合力が、排出通路21を遮断させる方向へ弁体22aを附勢するバネ22bの附勢力に打ち勝つようになって、弁体22aを後退させて排出通路21を開放するようになっている。
【0035】
また、この可変リリーフ弁22にあっては、比例ソレノイド22cに供給する電流量を増大させると、比例ソレノイド22cが発生する推力を増大させることができるようになっており、比例ソレノイド22cに供給する電流量を最大とすると開弁圧が最小となり、反対に、比例ソレノイド22cに全く電流を供給しないと開弁圧が最大となる。
【0036】
したがって、排出通路21と可変リリーフ弁22とを設けることで、アクチュエータAfを伸縮作動させる際に、ロッド側室5内の圧力は可変リリーフ弁22の開弁圧に調節され、ロッド側室5の圧力は可変リリーフ弁22の開弁圧を調節することで容易に調節することができる。このように排出通路21と可変リリーフ弁22とを設けることで、アクチュエータAfの推力を調節するために必要なセンサ類が不要となり、第一開閉弁9と第二開閉弁11の高速で開閉させたり、第一開閉弁9および第二開閉弁11を開閉機能付きの可変リリーフ弁としたりする必要もなくなるので、鉄道車両用制振装置1が安価となり、ハードウェア的にもソフトウェア的にも堅牢なシステムを構築することができる。
【0037】
なお、可変リリーフ弁22は、与える電流量で開弁圧を比例的に変化させることができる比例電磁リリーフ弁を用いることで開弁圧の制御が簡単となるが、開弁圧を調節できるリリーフ弁であれば比例電磁リリーフ弁に限定されるものではない。
【0038】
そして、可変リリーフ弁22は、第一開閉弁9および第二開閉弁11の開閉状態に関わらず、アクチュエータAfに伸縮方向の過大な入力があって、ロッド側室5の圧力が開弁圧を超える状態となると、排出通路21を開放してロッド側室5をタンク7へ連通し、ロッド側室5内の圧力をタンク7へ逃がして、アクチュエータAfのシステム全体を保護するようになっている。このように、排出通路21と可変リリーフ弁22を設けることでシステムの保護も可能となる。
【0039】
さらに、この実施の形態のアクチュエータAfは、ダンパ回路Dを備えており、このダンパ回路Dは、第一開閉弁9および第二開閉弁11が閉弁している場合に、アクチュエータAfをダンパとして機能させる。ダンパ回路Dは、ピストン側室6からロッド側室5へ向かう液体の流れのみを許容する整流通路18と、タンク7からピストン側室6へ向かう液体の流れのみを許容する吸込通路19を備えている。また、この実施の形態の場合には、アクチュエータAfが、排出通路21と可変リリーフ弁22とを備えているので、可変リリーフ弁22が減衰弁として機能するようになっている。
【0040】
より詳細には、整流通路18は、ピストン側室6とロッド側室5とを連通しており、途中に逆止弁18aが設けられ、この整流通路18は、ピストン側室6からロッド側室5へ向かう液体の流れのみを許容する一方通行の通路に設定されている。さらに、吸込通路19は、タンク7とピストン側室6とを連通しており、途中に逆止弁19aが設けられ、この吸込通路19は、タンク7からピストン側室6へ向かう液体の流れのみを許容する一方通行の通路に設定されている。なお、整流通路18は、第一開閉弁9の遮断ポジション9cを逆止弁とすることで第一通路8に集約することができ、吸込通路19についても、第二開閉弁11の遮断ポジション11cを逆止弁とすることで第二通路10に集約することができる。
【0041】
このように構成されたダンパ回路Dは、アクチュエータAfにおける第一開閉弁9と第二開閉弁11がともに遮断ポジション9c,11cを採ると、整流通路18および吸込通路19と排出通路21で、ロッド側室5、ピストン側室6およびタンク7が数珠繋ぎに連通させる。そして、整流通路18、吸込通路19および排出通路21は、一方通行の通路に設定されているので、アクチュエータAfが外力によって伸縮させられると、必ずシリンダ2から液体が排出されて排出通路21を介してタンク7へ戻され、シリンダ2で足りなくなる液体は吸込通路19を介してタンク7からシリンダ2内へ供給される。この液体の流れに対して上記可変リリーフ弁22が抵抗となってシリンダ2内の圧力を開弁圧に調節する圧力制御弁として機能するので、アクチュエータAfは、パッシブなユニフロー型のダンパとして機能することになる。なお、可変リリーフ弁22と排出通路21とを設けない場合には、別途、ロッド側室5とタンク7とを接続する通路と、この通路の途中に減衰弁とを設けてダンパ回路Dを構成するようにしてもよい。また、アクチュエータAfの各機器への通電が不能となるようなフェール時には、第一開閉弁9と第二開閉弁11のバルブ9a,11aがバネ9d,11dに押圧されて、それぞれ遮断ポジション9c,11cを採り、可変リリーフ弁22は、開弁圧が最大に固定された圧力制御弁として機能するので、アクチュエータAfは、自動的に、パッシブダンパとして機能することができる。
【0042】
上記のように構成されたアクチュエータAf,Arに所望の伸長方向の推力を発揮させる場合、たとえば、コントローラCは、モータ15を回転させてポンプ12からシリンダ2内へ液体を供給しつつ、各アクチュエータAf,Arの第一開閉弁9を連通ポジション9bとし第二開閉弁11を遮断ポジション11cとする。このようにすることで、ロッド側室5とピストン側室6とが連通状態におかれて両者にポンプ12から液体が供給され、ピストン3が図2中左方へ押されアクチュエータAf,Arは伸長方向の推力を発揮する。ロッド側室5内およびピストン側室6内の圧力が可変リリーフ弁22の開弁圧を上回ると、可変リリーフ弁22が開弁して液体が排出通路21を介してタンク7へ逃げるので、ロッド側室5内およびピストン側室6内の圧力は、可変リリーフ弁22に与える電流量で決まる可変リリーフ弁22の開弁圧にコントロールされる。そして、アクチュエータAf,Arは、ピストン3におけるピストン側室6側とロッド側室5側の受圧面積差に上記した可変リリーフ弁22によってコントロールされるロッド側室5内およびピストン側室6内の圧力を乗じた値の伸長方向の推力を発揮する。
【0043】
これに対して、アクチュエータAf,Arに所望の収縮方向の推力を発揮させる場合、コントローラCは、モータ15を回転させてポンプ12からロッド側室5内へ液体を供給しつつ、各アクチュエータAf,Arの第一開閉弁9を遮断ポジション9cとし第二開閉弁11を連通ポジション11bとする。このようにすることで、ピストン側室6とタンク7が連通状態におかれるとともにロッド側室5にポンプ12から液体が供給されるので、ピストン3が図2中右方へ押されアクチュエータAf,Arは収縮の推力を発揮する。上記したところと同様に、可変リリーフ弁22の電流量を調節することで、アクチュエータAfは、ピストン3におけるロッド側室5側の受圧面積と可変リリーフ弁22にコントロールされるロッド側室5内の圧力を乗じた収縮方向の推力を発揮する。
【0044】
また、このアクチュエータAf,Arにあっては、アクチュエータとして機能するのみならず、モータ15の駆動状況に関わらず、第一開閉弁9と第二開閉弁11の開閉のみでダンパとしても機能させることができるので、面倒かつ急峻な弁の切換動作を伴うことが無いので、応答性および信頼性が高いシステムを提供することができる。
【0045】
なお、このアクチュエータAf,Arにあっては、片ロッド型に設定されているので、両ロッド型のアクチュエータに比較してストローク長を確保しやすく、アクチュエータの全長が短くなって、鉄道車両への搭載性が向上する。
【0046】
また、このアクチュエータAf,Arにおけるポンプ12からの液体供給および伸縮作動による液体の流れは、ロッド側室5、ピストン側室6を順に通過して最終的にタンク7へ還流するようになっており、ロッド側室5あるいはピストン側室6内に気体が混入しても、アクチュエータAf,Arの伸縮作動によって自立的にタンク7へ排出されるので、推進力発生の応答性の悪化を阻止できる。
【0047】
したがって、アクチュエータAf,Arの製造にあたって、面倒な油中での組立や真空環境下での組立を強いられることが無く、液体の高度な脱気も不要となるので、生産性が向上するとともに製造コストを低減することができる。
【0048】
さらに、ロッド側室5あるいはピストン側室6内に気体が混入しても、気体は、アクチュエータAf,Arの伸縮作動によって自立的にタンク7へ排出されるので、性能回復のためのメンテナンスを頻繁に行う必要もなくなり、保守面における労力とコスト負担を軽減することができる。
【0049】
つづいて、コントローラCは、図1から図3に示すように、車体前側としての車体前部Bfの車両進行方向に対して水平横方向の前側の横方向加速度αfを検出する前側加速度センサ40と、車体後側としての車体後部Brの車両進行方向に対して後側の水平横方向の横方向加速度αrを検出する後側加速度センサ41と、横方向加速度αfと横方向加速度αrに含まれる曲線走行時の定常加速度、ドリフト成分やノイズを除去するバンドパスフィルタ42,43と、バンドパスフィルタ42,43で濾過した横方向加速度αfと横方向加速度αrを処理して、各アクチュエータAf,Arのモータ15、第一開閉弁9のソレノイド9e、第二開閉弁11のソレノイド11e、可変リリーフ弁22の比例ソレノイド22cへ制御指令を出力する制御部44とを備えて構成されていて、各アクチュエータAf,Arの推力を制御するようになっている。なお、バンドパスフィルタ42,43で横方向加速度αfと横方向加速度αrに含まれる曲線走行時の定常加速度が除去されるので、乗り心地を悪化させる振動のみを抑制することができる。
【0050】
制御部44は、前側加速度センサ40で検知した前側の横方向加速度αfと後側加速度センサ41で検知した後側の横方向加速度αrに基づいて前後の台車Tf,Trの直上における車体中心G周りのヨー加速度ωを求めるヨー加速度演算部44aと、横方向加速度αfと横方向加速度αrに基づいて車体Bの中心Gのスエー加速度βを求めるスエー加速度演算部44bと、鉄道車両の走行中の区間種類を判断する区間判断手段としての区間判断部44cと、ヨー加速度ωとスエー加速度βと区間判断部44cの判断結果に基づいて前後のアクチュエータAf,Arで個々に発生すべき推力である推力指令値Ff,Frを求める指令演算部44dと、推力指令値Ff,Frに基づいてモータ15、第一開閉弁9のソレノイド9e、第二開閉弁11のソレノイド11e、可変リリーフ弁22の比例ソレノイド22cを駆動する駆動部44eとを備えて構成されている。
【0051】
なお、コントローラCは、ハードウェア資源としては、図示はしないが具体的にはたとえば、前側加速度センサ40と後側加速度センサ41が出力する信号を取り込むためのA/D変換器と、バンドパスフィルタ42,43と、バンドパスフィルタ42,43で濾過した横方向加速度αfと横方向加速度αrを取り込んでアクチュエータAf,Arを制御するのに必要な処理に使用されるプログラムが格納されるROM(Read Only Memory)等の記憶装置と、上記プログラムに基づいた処理を実行するCPU(Central Processing Unit)などの演算装置と、上記CPUに記憶領域を提供するRAM(Random Access Memory)等の記憶装置とを備えて構成されればよく、コントローラCの制御部44における各部は、CPUが上記処理を行うためのプログラムを実行することで実現することができる。また、バンドパスフィルタ42,43は、上記CPUがプログラムを実行することで実現されてもよい。
【0052】
つづいて、横方向加速度αf,αrは、たとえば、図1中車体Bの中央を左右に通る軸を基準として上方側へ向く方向となる場合に、正の符号を採り、反対に、図1中車体Bの中央を左右に通る軸を基準として下方側へ向く方向となる場合に、負の符号を採るように設定され、ヨー加速度演算部44aは、前側の横方向加速度αfと後側の横方向加速度αrの差を2で割ることで前後の台車Tf,Trのそれぞれの直上における車体中心G周りのヨー加速度ωを求め、スエー加速度演算部44bは、横方向加速度αfと横方向加速度αrの和を2で割って車体Bの中心Gのスエー加速度βを求める。前側加速度センサ40と後側加速度センサ41の設置箇所は、ヨー加速度ωを求める都合上、前側加速度センサ40にあっては車体Bの中心Gを含む前後方向または対角方向に沿う線上であって前側アクチュエータAfの近傍に配置されるとよく、後側加速度センサ41にあっても車体Bの中心Gを含む前後方向または対角方向に沿う線上であって後側アクチュエータArの近傍に配置されるとよいが、中心Gと前側加速度センサ40と後側加速度センサ41の距離と位置関係と横方向加速度αf,αrとからヨー加速度ωを求めることができるので前側加速度センサ40と後側加速度センサ41を任意に設定することも可能である。その場合、ヨー加速度ωは、横方向加速度αfと横方向加速度αrの差を2で割って求めるのではなく、上記横方向加速度αfと横方向速度αrの差と、車体Bの中心Gと各加速度センサ40,41との距離、位置関係からヨー加速度ωを得るようにすればよい。具体的には、前側加速度センサ40と車体Bの中心Gとの前後方向距離Lfと、前側加速度センサ41と車体Bの中心Gとの前後方向距離Lrとすると、ヨー加速度ωは、ω=(αf−αr)/(Lf+Lr)で計算できる。本実施の形態では、ヨー加速度ωを前側加速度センサ40と前側加速度センサ41で加速度を検知して求めているが、ヨー加速度センサを用いて検知するようにしてもよい。
【0053】
区間判断部44cは、モータ15の目標回転速度Vrefと実際の回転速度Vの速度差である速度偏差εに基づいて、鉄道車両の走行中の区間種類が明り区間であるかトンネル区間を判断するようになっている。明り区間は、いわゆる、トンネル以外の区間のことであり、非トンネル区間の総称である。
【0054】
以下、区間判断部44cにおける判断について詳細に説明するが、この判断の説明の前に、制御部44がモータ15を一定回転速度で駆動するための制御内容について少々説明する。このモータ15の駆動は、制御部44における駆動部44eによって行われており、モータ15は、駆動部44eによって一定回転速度で回転駆動されるようになっている。
【0055】
具体的には、制御部44は、モータ15の回転速度をレゾルバやホール素子等で構成されるモータ15における図外のロータの回転位置を検出する回転位置センサ45を用いてセンシングしており、駆動部44eは、この回転位置センサ45で検知した回転位置から回転速度Vを得て、この回転速度Vをフィードバックしてモータ15を制御している。より詳細には、駆動部44eは、モータ15を一定回転速度で駆動するために検知したモータ15の回転速度Vをフィードバックするために回転速度Vを負帰還する速度ループと、速度ループ内に設けた電流ループとモータ15の図外の巻線へ電圧を印加するための図外のドライバとを備えている。速度ループでは、上記したモータ15の一定回転速度を目標回転速度Vrefとし、この目標回転速度Vrefと回転速度Vの速度偏差εをPI補償やPID補償する等して目標電流値を求め、これを図示しない電流ループへ入力する。電流ループでは、モータ15に流れる実電流をフィードバックして最終的に上記ドライバへ与える電圧指令値を生成し、駆動部44eは、ドライバを通じてモータ15内の図外の巻線へ電圧を印加してモータ15を制御するようになっている。
【0056】
このように駆動部44eでは、モータ15を一定回転速度で駆動するようになっているのであるが、鉄道車両がトンネル区間を走行する場合、車体B周りの空気の流れの乱れによって車体Bに大きな外力が作用する。そのため、車体Bは、トンネル区間走行中では明り区間走行中よりも大きな振幅で振動する。
【0057】
この車体Bに作用する外力は、アクチュエータAf,Arにも作用し、ロッド側室5内の圧力に変動が生じたり、車体Bの振動を抑制するためにアクチュエータAf,Arに出力させる推力も大きく変動したりするため、これらがポンプ12の吐出圧力に影響し、ポンプ12の回転速度も振動的になる。ポンプ12の回転速度が振動的となると、当然に、これに接続されるモータ15の回転速度もトンネル区間では、明り区間に比較して振動的となって、実際の回転速度Vと目標回転速度Vrefの速度偏差εは、トンネル区間走行中では、明り区間走行中よりも大きくなる傾向にある。
【0058】
したがって、目標回転速度Vrefとモータ15の実際の回転速度Vとの差である速度偏差εの絶対値が大きい場合に、鉄道車両がトンネル区間を走行中であると判断することができる。
【0059】
そこで、区間判断部44cは、目標回転速度Vrefとモータ15の実際の回転速度Vとの差である速度偏差εの絶対値が速度閾値Vbを超えると、鉄道車両がトンネル区間を走行中であると判断し、速度偏差εの絶対値が速度閾値Vb以下である場合には、鉄道車両が明り区間を走行中であると判断する。この場合の速度閾値Vbは、実際に鉄道車両を走行させて明り区間走行中の速度偏差εのデータとトンネル区間走行中の速度偏差εのデータを実験的に収集して、上記判断に最適となるように設定すればよく、たとえば、トンネル区間走行中の速度偏差εの平均値や平均値−標準偏差×a(a=1,2)で演算される値や期待値としたり、明り区間走行中の速度偏差εの上限値や平均値+標準偏差×a(a=1,2)で演算される値としたりすることもできる。なお、目標回転速度Vrefは、図3に示すように、都度、駆動部44eから得るようにしてもよいし、他から得てもよいし、さらには、予め区間判断部44cで記憶しておくようにしてもよい。
【0060】
このように、鉄道車両用制振装置1では、鉄道車両の走行位置をモニタせずとも区間種類を判断することができるので、他の装置から走行位置情報を入手する必要がない。
【0061】
ところで、区間判断部44cは、上記の如くの判断によって、鉄道車両が走行中の区間種類を判断することができるが、目標回転速度Vrefと一回のサンプリングで得た回転速度Vとの速度偏差εの絶対値が速度閾値Vbを超えるとトンネル区間であると判断する場合、何らかの外乱によって車体Bが大きく振動してもトンネル区間であると判断し、トンネル区間の走行中でも速度偏差εが速度閾値Vb以下では明り区間と判断することになる。より区間種類の判断の正確度を向上するためには、速度偏差εの二乗平均平方根を求め、当該二乗平均平方根が所定の速度閾値Vbを超えると鉄道車両の走行中の区間がトンネル区間であると判断し、速度閾値Vb以下であると当該走行中の区間を明り区間であると判断する。この場合の速度閾値Vbは、速度偏差εの二乗平均平方根の値から区間種類を判断するために設定されるものであるから、上記した速度偏差εの絶対値に対して設定される速度閾値Vbと同じ値に設定されるとは限らない。速度偏差εの二乗平均平方根は、予め決められた個数の速度偏差εの二乗の総和を上記個数で割った値の平方根を求めることで得ることができる。速度偏差εの二乗平均平方根を得るための速度偏差εの個数は、サンプリングタイム、制御周波数や区間判断部44cにおける判断に要する時間に応じて任意に設定されるが、たとえば、0.5秒間から2秒間にサンプリングされる個数に設定される。
【0062】
このように、速度偏差εの二乗平均平方根を判断に用いることで、瞬間的に速度偏差εの絶対値が大きくなったり小さくなったりしても、速度偏差εの二乗平均平方根に与える影響は小さくなるから、この速度偏差εの二乗平均平方根と速度閾値Vbとを比較することで、何らかの外乱によって瞬間的に車体Bが大きく振動してもトンネル区間で判断されにくくなり、トンネル区間の走行中に速度偏差εが瞬間的に速度閾値Vb以下となっても明り区間と判断されにくくなるので、鉄道車両の走行中の区間種類をより正確に判断することができる。なお、この速度偏差εの二乗平均平方根を用いて判断する場合、速度閾値Vbは、実際に鉄道車両を走行させて明り区間走行中の速度偏差εの二乗平均平方根のデータとトンネル区間走行中の速度偏差εの二乗平均平方根のデータを実験的に収集して、上記判断に最適となるように設定すればよく、たとえば、トンネル区間走行中の速度偏差εの二乗平均平方根の平均値や平均値−標準偏差×a(a=1,2)で演算される値や期待値としたり、明り区間走行中の速度偏差εの二乗平均平方根の上限値や平均値+標準偏差×a(a=1,2)で演算される値としたりすることもできる。
【0063】
なお、区間判断部44cでの判断において、トンネル区間であると判断された後、明り区間と判断するためには、複数回連続して明り区間であると判断されることを要するようにしてもよい。
【0064】
以上のように、区間判断部44cは、鉄道車両が走行中の区間種類が明り区間であるかトンネル区間であるかを判断することができるが、この実施の形態では、アクチュエータAf,Arの推力の絶対値が推力閾値を超えるか否かをも判定していて、明り区間が直線区間であるか曲線区間であるか、さらに、鉄道車両用制振装置1に異常があるか否かをも判断することができるようになっている。
【0065】
詳しくは、区間判断部44cは、速度偏差εを用いた上記の区間種類判断に加えて、アクチュエータAf,Arの推力の絶対値が推力閾値Fcを超えるか否かも判定している。アクチュエータAf,Arが実際に出力している推力は、モータMの図示しない出力シャフトのトルクを観測することで得ることができる。モータ15の出力シャフトはポンプ12の入力軸に連結されており、ポンプ12の吐出圧がロッド側室5の圧力となっているため、モータ15の出力シャフトのトルクを観測することで、アクチュエータAf,Arとトルクとの関係を予め得ておけば、アクチュエータAf,Arが出力している推力を得ることができる。なお、上記したトルクには、ポンプ12の可動部における動摩擦力による成分が含まれているため、この成分が無視できなければ演算によって除去するようにすればよい。無論、可変リリーフ弁22の開弁圧を制御しているので、可変リリーフ弁22の比例ソレノイド22cに供給する電流量によっても推定することができる。また、モータ15のトルクは、モータ15に流れる電流に比例する関係にあるから、モータ15に流れる電流を観測してアクチュエータAf,Arの推力を得てもよい。
【0066】
そして、区間判断部44cは、図4に示すように、鉄道車両の走行中の区間種類が明り区間と判断する場合であって、アクチュエータAf,Arの推力の絶対値が推力閾値Fcを超える場合、区間種類を曲線区間であると判断(図4中領域Y)し、そうでなければ、つまり、アクチュエータAf,Arの推力の絶対値が推力閾値以下である場合、区間種類を直線区間であると判断(図4中領域W)する。一般に曲線区間では、車体Bにはカントによっては緩和できない超過遠心加速度と称される定常加速度が作用するが、この定常加速度によって生じる車体Bの振動の周波数帯は、そもそも乗心地を向上するために抑制したい車体Bの振動の周波数帯に近いため、バンドパスフィルタ42,43で完全に定常加速度を除去することが難しく、結果、曲線区間では外乱による車体Bの振動に定常加速度が重畳される。したがって、直線区間におけるアクチュエータAf,Arの推力の絶対値よりも曲線区間におけるアクチュエータAf,Arの推力の絶対値の方が大きくなる傾向にある。そして、推力閾値は、たとえば、実際に鉄道車両を走行させて明り区間中の直線区間を走行中のアクチュエータAf,Arの推力のデータと明り区間中の曲線区間を走行中のアクチュエータAf,Arの推力のデータを実験的に収集して、上記判断に最適となるように設定すればよく、たとえば、曲線区間走行中のアクチュエータAf,Arの推力の絶対値における下限値や平均値−標準偏差×a(a=1,2)で演算される値や期待値としたり、直線区間走行中のアクチュエータAf,Arの推力の絶対値における上限値や平均値+標準偏差×a(a=1,2)で演算される値としたりすることもできる。
【0067】
以上より、明り区間であっても、アクチュエータAf,Arの推力の絶対値が推力閾値Fcを超えることで、鉄道車両用制振装置1は、鉄道車両が走行している区間の種類が明り区間中のうち曲線区間であるか、直線区間であるかを判断することができる。
【0068】
また、区間判断部44cは、鉄道車両の走行中の区間種類がトンネル区間と判断する場合であって、アクチュエータAf,Arの推力の絶対値が推力閾値Fc以下の場合、鉄道車両用制振装置1が失陥していると判断(図4中領域Z)する。トンネル区間では、アクチュエータAf,Arの推力の絶対値は大きくなるため、当該絶対値が推力閾値Fcよりも大きい場合には、トンネル区間を走行中であって鉄道車両用制振装置1が正常に機能していると考えられ(図4中領域X)、反対に、当該絶対値が推力閾値Fc以下の場合には、トンネル区間を走行中であってもアクチュエータAf,Arの推力が小さくなってことから、鉄道車両用制振装置1が失陥状態であると判断(図4中領域Z)することができる。失陥と判断される場合、そのまま車体Bの振動を抑制する制御を継続すると、車体Bを加振してしまったり、車両における乗り心地を悪化させたりする可能性があるため、鉄道車両用制振装置1は、モータ15、第一開閉弁9、第二開閉弁11および可変リリーフ弁22への電力供給を停止して上述のダンパ回路Dを有効にし、アクチュエータAf,Arをパッシブなダンパとして機能させる。このように失陥時にはアクチュエータAf,Arをパッシブなダンパとして機能させることで、失陥時においてもアクチュエータAf,Arに減衰力を発揮させて車体Bの振動を抑制することができる。
【0069】
なお、上記した直線区間と曲線区間の別と失陥の判断は、アクチュエータAf,Arの推力の代わりにアクチュエータAf,Arの推力指令値Ff,Frを用いても同様に行うことができる。
【0070】
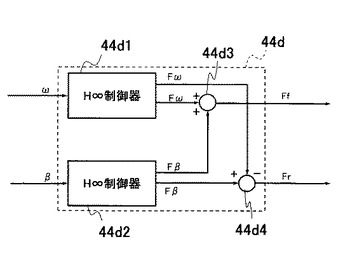
次に、指令演算部44dは、この実施の形態では、図5に示すように、H∞制御器44d1,44d2を含んで構成されており、ヨー加速度演算部44aが演算したヨー加速度ωから車体Bのヨーを抑制するヨー指令値Fωを演算するH∞制御器44d1と、スエー加速度演算部44bが演算したスエー加速度βから車体Bのスエーを抑制するスエー指令値Fβを演算するH∞制御器44d2と、ヨー指令値Fωとスエー指令値Fβとを加算して前側のアクチュエータAfが出力すべき推力を指示する推力指令値Ffを求める加算器44d3と、スエー指令値Fβからヨー指令値Fωを減算して後側のアクチュエータArが出力すべき推力を指示する推力指令値Frを求める減算器44d4とを備えて構成されている。
【0071】
H∞制御器44d1,44d2は、直線区間走行用の制御ゲイン、曲線区間用の制御ゲイン、トンネル区間用の制御ゲインを保有しており、上記した区間判断部44cの判断結果に応じて、対応する制御ゲインを選択してヨー指令値Fωとスエー指令値Fβを演算する。
【0072】
なお、ヨー指令値Fωを演算する際に使用される制御ゲインは、直線区間用よりも曲線区間用を大きくし、さらに、曲線区間用よりもトンネル区間用を大きくするといったように、それぞれの区間に最適となる値に設定しておくとよい。また、スエー指令値Fβを演算する際に使用される制御ゲインについても同様にそれぞれの区間に最適となる値に設定されるが、曲線区間ではスエー加速度βに定常加速度が含まれているので直線区間用の制御ゲインよりも曲線区間用の制御ゲインを小さくしておくとよく、さらに、トンネル区間用の制御ゲインは直線区間用の制御ゲインよりも大きくしておくとよい。
【0073】
上記した指令演算部44dでは、H∞制御を行うようになっているので、車体Bに入力される振動の周波数によらず高い制振効果を得ることができ、高いロバスト性を得ることができる。なお、このことは、H∞制御以外の制御を用いることを否定するものではない。したがって、たとえば、横方向加速度αf,αrから横方向速度を得て、横方向速度にスカイフック減衰係数を乗じて推力指令値を求めるスカイフック制御を用いて前後のアクチュエータAf,Arを制御することもできる。また、制御にあたって、ヨー加速度ωとスエー加速度βから、前側のアクチュエータAfと後側のアクチュエータArとを関連させてその推力を制御するようにしているが、前側のアクチュエータAfと後側のアクチュエータArの制御を独立させて制御することも可能である。
【0074】
そして、駆動部44eでは、推力指令値Ff,Fr通りに各アクチュエータAf,Arに推力を発揮させるべく、これらアクチュエータAf,Arへ制御指令を与える。具体的には、駆動部44eは、推力指令値Ff,Frから、モータ15、各アクチュエータAf,Arの第一開閉弁9のソレノイド9e、第二開閉弁11のソレノイド11eおよび可変リリーフ弁22の比例ソレノイド22cへ与えるべき制御指令を求めて当該制御指令を出力することになる。また、推力指令値Ff,Frから制御指令を求める際、現在アクチュエータAf,Arが出力している推力をフィードバックして制御指令を求めてもよい。
【0075】
より詳細には、駆動部44eは、上記のように、推力指令値Ff,Frから各アクチュエータAf,Arの第一開閉弁9のソレノイド9e、第二開閉弁11のソレノイド11e、可変リリーフ弁22の比例ソレノイド22cへ与えるべき制御指令を求めて当該制御指令を出力する。
【0076】
かくして、この鉄道車両用制振装置1は、区間判断手段である区間判断部44cによって鉄道車両が走行中である区間種類が明り区間かトンネル区間のいずれかであるかを判断し、この判断結果に基づいて、鉄道車両が走行中である区間種類に適した制御ゲインを選択して推力指令値Ff,Frを求めてアクチュエータAf,Arを制御することで、区間種類によって異なる振動モードで振動する鉄道車両の車体Bを効果的に制振することができるのである。
【0077】
したがって、この鉄道車両用制振装置1によれば、区間判断手段である区間判断部44cがモータ15の目標回転速度Vrefと実際の回転速度Vの速度差である速度偏差εに基づいて、鉄道車両の走行中の区間種類が明り区間であるかトンネル区間を判断するようになっているから、車両モニタ装置等の他の機器から鉄道車両の走行位置情報や区間種類情報を得ずとも区間種類を判断することができる。
【0078】
また、鉄道車両用制振装置1によれば、車両モニタ装置等の他の機器から鉄道車両の走行位置情報や区間種類情報を得る必要がないので、車両モニタ装置等に接続するためのインターフェースが不要となり、在来線のように車両情報伝送設備の整っていない鉄道車両であっても容易に搭載することができる。
【0079】
さらに、この実施の形態では、区間判断手段である区間判断部44cは、明り区間をさらに直線区間と曲線区間とに分けて判断することができるので、より区間種類に適した制御ゲインの選択が可能となり、鉄道車両の車体Bをより一層効果的に制振することができる。
【0080】
そして、区間判断手段である区間判断部44cは、鉄道車両の走行中の区間種類がトンネル区間と判断する場合であって、アクチュエータAf,Arの推力或いは推力指令値が推力閾値以下の場合、鉄道車両用制振装置1が失陥した状態であると判断するので、失陥状態で車体Bの振動を抑制する制御を継続してしまうことがない。また、アクチュエータAf,Arがダンパとして機能できる場合には、失陥であると判断した際に、アクチュエータAf,Arをパッシブなダンパとすることで失陥しても車体Bの振動を減衰力で抑制することができる。
【0081】
また、速度偏差εの二乗平均平方根を求め、当該二乗平均平方根が所定の速度閾値Vbを超えると上記鉄道車両の走行位置をトンネル区間であると判断し、上記速度閾値Vb以下であると当該走行位置を明り区間であると判断する場合には、鉄道車両用制振装置1は、鉄道車両の走行中の区間種類をより正確に判断することができ、区間種別が頻繁に入れ替わるような判断が防止され、車体Bの振動モードにより適した制御ゲインの安定的に選択して車体Bの振動を安定的に抑制することができる。
【0082】
さらに、本実施の形態の鉄道車両用制振装置1では、曲線区間であると判断する場合、スエー指令値Fωを求める際の制御ゲインを明り区間であって曲線区間ではない場合の制御ゲインよりも低くするので、バンドパスフィルタ41,42では除去しがたい定常加速度の影響を低減して、曲線区間走行中の鉄道車両における乗心地を飛躍的に向上することができる。
【0083】
なお、上記したところでは、一つのコントローラCで複数のアクチュエータAf,Arを制御するようにしているが、アクチュエータAf,Ar毎にコントローラCを設けて制御するようにしてもよいことは当然である。
【0084】
以上で、本発明の実施の形態についての説明を終えるが、本発明の範囲は図示されまたは説明された詳細そのものには限定されないことは勿論である。
【産業上の利用可能性】
【0085】
本発明は、鉄道車両等の制振に利用可能である。
【符号の説明】
【0086】
1 鉄道車両用制振装置
2 シリンダ
3 ピストン
4 ロッド
5 ロッド側室
6 ピストン側室
7 タンク
8 第一通路
9 第一開閉弁
10 第二通路
11 第二開閉弁
12 ポンプ
15 モータ
16 供給通路
17 逆止弁
18 整流通路
19 吸込通路
21 排出通路
22 可変リリーフ弁
44c 区間判断手段としての区間判断部
Af 前側のアクチュエータ
Ar 後側のアクチュエータ
B 車体
Tf,Tr 台車
【技術分野】
【0001】
本発明は、鉄道車両用制振装置の改良に関する。
【背景技術】
【0002】
従来、この種の鉄道車両用制振装置にあっては、たとえば、鉄道車両に車体の進行方向に対して左右方向の振動を抑制すべく、車体と台車との間に介装されて使用されるものが知られている。
【0003】
より詳しくは、この鉄道車両用制振装置は、鉄道車両の台車と車体の一方に連結されるシリンダと、当該シリンダ内に摺動自在に挿入されるピストンと、シリンダ内に挿入されてピストンと台車と車体の他方に連結されるロッドと、シリンダ内にピストンで区画したロッド側室とピストン側室と、タンクと、ロッド側室とピストン側室とを連通する第一通路の途中に設けた第一開閉弁と、ピストン側室とタンクとを連通する第二通路の途中に設けた第二開閉弁と、ロッド側室へ液体を供給するポンプと、ロッド側室を上記タンクへ接続する排出通路と、当該排出通路の途中に設けられ開弁圧を変更可能な可変リリーフ弁とを備えており、上記したポンプ、第一開閉弁、第二開閉弁および可変リリーフ弁を駆動することで、伸縮双方へ推力を発揮することができ、この推力で車体の振動を抑制するようになっている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−65797号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そして、鉄道車両用制振装置は、アクチュエータの発生すべき推力を推力指令値として求め、アクチュエータの推力を推力指令値通りに制御するようにして、車体の振動を抑制するようにしている。
【0006】
この推力指令値には、制御ゲインを用いて求める等とされる。たとえば、スカイフック制御の場合、制御ゲインであるスカイフックゲインを車体の横方向の速度に乗じることで推力指令値が求められる。このように、推力指令値を求める際には、加速度や速度等を検知して、これに制御ゲインを乗じることで推力指令値を求めるのである。
【0007】
一方、鉄道車両は、一回の営業走行で明り区間(非トンネル区間)とトンネル区間を含む路線を走行しなくてはならない場合がほとんどであり、明り区間とトンネル区間では車体の振動モードが異なるため、一回の営業走行で振動モードが異なる区間を走行しなければならない。また、明り区間内であっても直線区間と曲線区間では車体の振動状況が異なる。
【0008】
したがって、上記制御ゲインを一定のまま、推力指令値を求めてアクチュエータを制御すると、推力指令値が振動モードに適したものとならず、車体の振動を効果的に抑制できずに、乗心地を良好に保つことができない悪化させてしまう場合がある。そこで、従来の鉄道車両用制振装置では、鉄道車両の車両モニタ装置等から鉄道車両の走行中の区間がどのような区間であるかの情報や走行位置の情報を得て、これらと制御ゲインとを関連付けるテーブルを参照して、最適な制御ゲインを選択するようにしていた。
【0009】
このように車両モニタ装置等から鉄道車両が走行中の区間種類や走行位置といった情報を得るためには、鉄道車両用制振装置を車両モニタ装置に接続するためのインターフェースが必要であり、また、在来線のように車両情報伝送設備の整っていない鉄道車両については、上記情報を得ることができず鉄道車両用制振装置を搭載することが難しいといった問題がある。
【0010】
そこで、本発明は上記不具合を改善するために創案されたものであって、その目的とするところは、鉄道車両側から走行位置情報や走行中の区間種類情報を得ることなく、鉄道車両の走行中の区間種類を判断することができる鉄道車両用制振装置を提供することである。
【課題を解決するための手段】
【0011】
上記した目的を達成するため、本発明の課題解決手段は、鉄道車両の台車と車体の一方に連結されるシリンダと、当該シリンダ内に摺動自在に挿入されるピストンと、上記シリンダ内に挿入されて上記ピストンと上記台車と車体の他方に連結されるロッドと、上記シリンダ内に上記ピストンで区画したロッド側室とピストン側室と、タンクと、上記ロッド側室と上記ピストン側室とを連通する第一通路の途中に設けた第一開閉弁と、上記ピストン側室と上記タンクとを連通する第二通路の途中に設けた第二開閉弁と、上記タンクから上記ロッド側室へ液体を供給するポンプと、当該ポンプを駆動するモータとを有するアクチュエータを備え、上記モータを一定の回転速度で駆動し、当該アクチュエータに出力させるべき推力を推力指令値として求め、上記アクチュエータを制御して車体の振動を抑制する鉄道車両用制振装置において、上記モータの目標回転速度と実際の回転速度の速度偏差に基づいて、上記鉄道車両の走行中の区間種類が明り区間であるかトンネル区間を判断する区間判断手段を備えたこと特徴とする。
【発明の効果】
【0012】
本発明の鉄道車両用制振装置によれば、区間判断手段がモータの目標回転速度と実際の回転速度の速度偏差に基づいて、鉄道車両の走行中の区間種類が明り区間であるかトンネル区間を判断するようになっているから、車両モニタ装置等の他の機器から鉄道車両の走行位置情報や区間種類情報を得ずとも区間種類を判断することができる。
【0013】
したがって、鉄道車両用制振装置によれば、車両モニタ装置等の他の機器から鉄道車両の走行位置情報や区間種類情報を得る必要がないので、車両モニタ装置等に接続するためのインターフェースが不要となり、在来線のように車両情報伝送設備の整っていない鉄道車両であっても容易に搭載することができる。
【図面の簡単な説明】
【0014】
【図1】一実施の形態における鉄道車両用制振装置を搭載した鉄道車両の平面図である。
【図2】一実施の形態の鉄道車両用制振装置におけるアクチュエータの詳細図である。
【図3】一実施の形態の鉄道車両用制振装置におけるコントローラの制御ブロック図である。
【図4】区間判断手段における区間種類の判断内容を説明するための図である。
【図5】一実施の形態の鉄道車両用制振装置におけるコントローラの指令演算部の制御ブロック図である。
【発明を実施するための形態】
【0015】
以下、図に示した実施の形態に基づき、本発明を説明する。一実施の形態における鉄道車両用制振装置1は、鉄道車両の車体Bの制振装置として使用され、図1に示すように、前側の台車Tfと車体Bとの間に対として介装される前側のアクチュエータAfと、後側の台車Trと車体Bとの間に介装される後側のアクチュエータArと、これら両方のアクチュエータAf,Arをアクティブ制御するコントローラCとを備えて構成されている。アクチュエータAf,Arは、詳細には、鉄道車両の場合、車体Bの下方に垂下されるピンPに連結され、車体Bと前後の台車Tf,Trとの間で対を成して並列に介装されている。
【0016】
そして、これら前後のアクチュエータAf,Arは、基本的には、アクティブ制御で車体Bの車両進行方向に対して水平横方向の振動を抑制するようになっており、この場合、コントローラCは、前後のアクチュエータAf,Arを制御して上記車体Bの横方向の振動を抑制するようになっている。
【0017】
コントローラCは、本実施の形態にあっては、車体Bの振動を抑制する制御を行う際に、車体Bの車体の前部Bfの車両進行方向に対して水平横方向の横方向加速度αfと、車体Bの車体の後部Brの車両進行方向に対して水平横方向の横方向加速度αrとを検知し、これらの横方向加速度αfと横方向加速度αrに基づいて前後の台車Tf,Trの直上における車体中心G周りの角加速度であるヨー加速度ωを求めるとともに、横方向加速度αfと横方向加速度αrに基づいて車体Bの中心Gの水平横方向の加速度であるスエー加速度βを求め、ヨー加速度ωとスエー加速度βに基づいて、前後のアクチュエータAf,Arで個々に発生すべき推力である推力指令値Ff,Frを求め、当該推力指令値Ff,Fr通りの推力を前後のアクチュエータAf,Arに発生させるべくフィードバック制御することで車体Bの上記横方向の振動を抑制するようになっている。
【0018】
つづいて、前後のアクチュエータAf,Arの具体的な構成について説明する。これらアクチュエータAf,Arは、同じ構成であるので、説明の重複を避けるため、便宜上、前側のアクチュエータAfの構成のみを説明し、後側のアクチュエータArについての具体的な説明を省略することとする。なお、図示したところでは、アクチュエータAfもアクチュエータArも二つずつ設けられているが、各アクチュエータAf,Arの一つに対して一つのコントローラCを設けることも可能である。
【0019】
アクチュエータAfは、図2に示すように、鉄道車両の台車Tfと車体Bの一方に連結されるシリンダ2と、シリンダ2内に摺動自在に挿入されるピストン3と、シリンダ2内に挿入されてピストン3と台車Tfと車体Bの他方に連結されるロッド4と、シリンダ2内にピストン3で区画したロッド側室5とピストン側室6と、タンク7と、ロッド側室5とピストン側室6とを連通する第一通路8の途中に設けた第一開閉弁9と、ピストン側室6とタンク7とを連通する第二通路10の途中に設けた第二開閉弁11と、タンク7からロッド側室5へ液体を供給するポンプ12と、当該ポンプ12を駆動するモータ15とを備えており、片ロッド型のアクチュエータとして構成されている。また、上記ロッド側室5とピストン側室6には液体が充填されるとともに、タンク7には、液体のほかに気体が充填されている。なお、タンク7内は、特に、気体を圧縮して充填することによって加圧状態とする必要は無い。
【0020】
そして、基本的には、第一開閉弁9で第一通路8を連通状態とするとともに第二開閉弁11を閉じた状態でポンプ12を駆動することで、このアクチュエータAfを伸長作動させることができ、第二開閉弁11で第二通路10を連通状態とするとともに第一開閉弁9を閉じた状態でポンプ12を駆動することで、アクチュエータAfを収縮作動させることができるようになっている。
【0021】
以下、アクチュエータAfの各部について詳細に説明する。シリンダ2は筒状であって、その図2中右端は蓋13によって閉塞され、図2中左端には環状のロッドガイド14が取り付けられている。また、上記ロッドガイド14内には、シリンダ2内に移動自在に挿入されるロッド4が摺動自在に挿入されている。このロッド4は、一端をシリンダ2外へ突出させており、シリンダ2内の他端を同じくシリンダ2内に摺動自在に挿入されているピストン3に連結してある。
【0022】
なお、ロッド4の外周とシリンダ2との間は図示を省略したシール部材によってシールされており、これによりシリンダ2内は密閉状体に維持されている。そして、シリンダ2内にピストン3によって区画されるロッド側室5とピストン側室6には、上述のように液体が充填されている。
【0023】
また、このアクチュエータAfの場合、ロッド4の断面積をピストン3の断面積の二分の一にして、ピストン3のロッド側室5側の受圧面積がピストン側室6側の受圧面積の二分の一となるようになっており、伸長作動時と収縮作動時とでロッド側室5の圧力を同じくすると、伸縮の双方で発生される推力が等しくなるようになっており、アクチュエータAfの変位量に対する液体量も伸縮両側で同じとなる。
【0024】
詳しくは、アクチュエータAfを伸長作動させる場合、ロッド側室5とピストン側室6を連通させた状態となってロッド側室5内とピストン側室6内の圧力が等しくなって、ピストン3におけるロッド側室5側とピストン側室6側の受圧面積差に上記圧力を乗じた推力を発生し、反対に、アクチュエータAfを収縮作動させる場合、ロッド側室5とピストン側室6との連通が断たれてピストン側室6をタンク7に連通させた状態となるので、ロッド側室5内の圧力とピストン3におけるロッド側室5側の受圧面積を乗じた推力を発生することになり、アクチュエータAfの発生推力は伸縮の双方でピストン3の断面積の二分の一にロッド側室5の圧力を乗じた値となるのである。したがって、このアクチュエータAfの推力を制御する場合、伸長作動、収縮作動共に、ロッド側室5の圧力を制御すればよいが、ピストン3のロッド側室5側の受圧面積をピストン側室6側の受圧面積の二分の一に設定しているので、伸縮両側で同じ推力を発生する場合に伸長側と収縮側でロッド側室5の圧力が同じとなって制御が簡素となり、加えて変位量に対する液体量も同じとなるので伸縮両側で応答性が同じとなる利点がある。なお、ピストン3のロッド側室5側の受圧面積をピストン側室6側の受圧面積の二分の一に設定しない場合にあっても、ロッド側室5の圧力でアクチュエータAfの伸縮両側の推力の制御をすることができる点は変わらない。
【0025】
戻って、ロッド4の図2中左端とシリンダ2の右端を閉塞する蓋13には、図示しない取付部を備えており、このアクチュエータAfを鉄道車両における車体Bと台車Tfとの間に介装することができるようになっている。
【0026】
そして、ロッド側室5とピストン側室6とは、第一通路8によって連通されており、この第一通路8の途中には、第一開閉弁9が設けられている。この第一通路8は、シリンダ2外でロッド側室5とピストン側室6とを連通しているが、ピストン3に設けられてもよい。
【0027】
第一開閉弁9は、この実施の形態の場合、電磁開閉弁とされており、第一通路8を開放してロッド側室5とピストン側室6とを連通する連通ポジション9bと、ロッド側室5とピストン側室6との連通を遮断する遮断ポジション9cとを備えたバルブ9aと、遮断ポジション9cを採るようにバルブ9aを附勢するバネ9dと、通電時にバルブ9aをバネ9dに対向して連通ポジション9bに切換えるソレノイド9eとを備えて構成されている。
【0028】
つづいて、ピストン側室6とタンク7とは、第二通路10によって連通されており、この第二通路10の途中には、第二開閉弁11が設けられている。第二開閉弁11は、この実施の形態の場合、電磁開閉弁とされており、第二通路10を開放してピストン側室6とタンク7とを連通する連通ポジション11bと、ピストン側室6とタンク7との連通を遮断する遮断ポジション11cとを備えたバルブ11aと、遮断ポジション11cを採るようにバルブ11aを附勢するバネ11dと、通電時にバルブ11aをバネ11dに対向して連通ポジション11bに切換えるソレノイド11eとを備えて構成されている。
【0029】
ポンプ12は、モータ15によって駆動されるようになっており、ポンプ12は、一方向のみに液体を吐出するポンプとされており、その吐出口は供給通路16によってロッド側室5へ連通され、吸込口はタンク7に通じて、モータ15によって駆動されると、タンク7から液体を吸込んでロッド側室5へ液体を供給する。
【0030】
上述のようにポンプ12は、一方向のみに液体を吐出するのみで回転方向の切換動作がないので、回転切換時に吐出量が変化するといった問題は皆無であり、安価なギアポンプ等を使用することができる。さらに、ポンプ12の回転方向が常に同一方向であるので、ポンプ12を駆動する駆動源であるモータ15にあっても回転切換に対する高い応答性が要求されず、その分、モータ15も安価なものを使用することができる。なお、供給通路16の途中には、ロッド側室5からポンプ12への液体の逆流を阻止する逆止弁17を設けてある。
【0031】
このアクチュエータAfにあっては、モータ15を一定の回転速度で駆動して、ポンプ12を定速回転させ一定流量の液体を吐出させ、当該液体をロッド側室5へ供給するようにしてある。そして、アクチュエータAfを伸長作動させる際には、第一開閉弁9を開きつつ第二開閉弁11を開閉させることによってロッド側室5内の圧力を調節し、逆に収縮作動させる際には第二開閉弁11を開きつつ第一開閉弁9を開閉させることによってロッド側室5内の圧力を調節することで、上記した推力指令値Ffが指示する通りの推力を得ることが可能である。伸長作動時には、ロッド側室5とピストン側室6とが連通状態におかれ、ピストン側室6内の圧力はロッド側室5の圧力と同じとなるため、このアクチュエータAfにあっては、伸長作動時も収縮作動時もロッド側室5の圧力をコントロールすることで推力をコントロールすることができる。なお、第一開閉弁9および第二開閉弁11は、開弁圧を調節可能であって開閉機能を備えた可変リリーフ弁とされてもよい。この場合には、第一開閉弁9或いは第二開閉弁11を伸縮作動時に開閉作動させるのではなく、開弁圧を調節することでアクチュエータAfの推力を調節することも可能である。
【0032】
上記のように、アクチュエータAfの推力調節が可能ではあるが、より簡単に推力調節が可能なように、本実施の形態の鉄道車両用制振装置1にあっては、ロッド側室5とタンク7とを接続する排出通路21と、この排出通路21の途中に設けた開弁圧を変更可能な可変リリーフ弁22とを設けている。
【0033】
可変リリーフ弁22は、この実施の形態では、比例電磁リリーフ弁とされており、排出通路21の途中に設けた弁体22aと、排出通路21を遮断するように弁体22aを附勢するバネ22bと、通電時にバネ22bに対向する推力を発生する比例ソレノイド22cとを備えて構成され、比例ソレノイド22cに流れる電流量を調節することで開弁圧を調節することができるようになっている。
【0034】
この可変リリーフ弁22は、弁体22aに作用させる排出通路21の上流となるロッド側室5の圧力がリリーフ圧(開弁圧)を超えると、当該排出通路21を開放させる方向に弁体22aを推す上記圧力に起因する推力と比例ソレノイド22cによる推力との合力が、排出通路21を遮断させる方向へ弁体22aを附勢するバネ22bの附勢力に打ち勝つようになって、弁体22aを後退させて排出通路21を開放するようになっている。
【0035】
また、この可変リリーフ弁22にあっては、比例ソレノイド22cに供給する電流量を増大させると、比例ソレノイド22cが発生する推力を増大させることができるようになっており、比例ソレノイド22cに供給する電流量を最大とすると開弁圧が最小となり、反対に、比例ソレノイド22cに全く電流を供給しないと開弁圧が最大となる。
【0036】
したがって、排出通路21と可変リリーフ弁22とを設けることで、アクチュエータAfを伸縮作動させる際に、ロッド側室5内の圧力は可変リリーフ弁22の開弁圧に調節され、ロッド側室5の圧力は可変リリーフ弁22の開弁圧を調節することで容易に調節することができる。このように排出通路21と可変リリーフ弁22とを設けることで、アクチュエータAfの推力を調節するために必要なセンサ類が不要となり、第一開閉弁9と第二開閉弁11の高速で開閉させたり、第一開閉弁9および第二開閉弁11を開閉機能付きの可変リリーフ弁としたりする必要もなくなるので、鉄道車両用制振装置1が安価となり、ハードウェア的にもソフトウェア的にも堅牢なシステムを構築することができる。
【0037】
なお、可変リリーフ弁22は、与える電流量で開弁圧を比例的に変化させることができる比例電磁リリーフ弁を用いることで開弁圧の制御が簡単となるが、開弁圧を調節できるリリーフ弁であれば比例電磁リリーフ弁に限定されるものではない。
【0038】
そして、可変リリーフ弁22は、第一開閉弁9および第二開閉弁11の開閉状態に関わらず、アクチュエータAfに伸縮方向の過大な入力があって、ロッド側室5の圧力が開弁圧を超える状態となると、排出通路21を開放してロッド側室5をタンク7へ連通し、ロッド側室5内の圧力をタンク7へ逃がして、アクチュエータAfのシステム全体を保護するようになっている。このように、排出通路21と可変リリーフ弁22を設けることでシステムの保護も可能となる。
【0039】
さらに、この実施の形態のアクチュエータAfは、ダンパ回路Dを備えており、このダンパ回路Dは、第一開閉弁9および第二開閉弁11が閉弁している場合に、アクチュエータAfをダンパとして機能させる。ダンパ回路Dは、ピストン側室6からロッド側室5へ向かう液体の流れのみを許容する整流通路18と、タンク7からピストン側室6へ向かう液体の流れのみを許容する吸込通路19を備えている。また、この実施の形態の場合には、アクチュエータAfが、排出通路21と可変リリーフ弁22とを備えているので、可変リリーフ弁22が減衰弁として機能するようになっている。
【0040】
より詳細には、整流通路18は、ピストン側室6とロッド側室5とを連通しており、途中に逆止弁18aが設けられ、この整流通路18は、ピストン側室6からロッド側室5へ向かう液体の流れのみを許容する一方通行の通路に設定されている。さらに、吸込通路19は、タンク7とピストン側室6とを連通しており、途中に逆止弁19aが設けられ、この吸込通路19は、タンク7からピストン側室6へ向かう液体の流れのみを許容する一方通行の通路に設定されている。なお、整流通路18は、第一開閉弁9の遮断ポジション9cを逆止弁とすることで第一通路8に集約することができ、吸込通路19についても、第二開閉弁11の遮断ポジション11cを逆止弁とすることで第二通路10に集約することができる。
【0041】
このように構成されたダンパ回路Dは、アクチュエータAfにおける第一開閉弁9と第二開閉弁11がともに遮断ポジション9c,11cを採ると、整流通路18および吸込通路19と排出通路21で、ロッド側室5、ピストン側室6およびタンク7が数珠繋ぎに連通させる。そして、整流通路18、吸込通路19および排出通路21は、一方通行の通路に設定されているので、アクチュエータAfが外力によって伸縮させられると、必ずシリンダ2から液体が排出されて排出通路21を介してタンク7へ戻され、シリンダ2で足りなくなる液体は吸込通路19を介してタンク7からシリンダ2内へ供給される。この液体の流れに対して上記可変リリーフ弁22が抵抗となってシリンダ2内の圧力を開弁圧に調節する圧力制御弁として機能するので、アクチュエータAfは、パッシブなユニフロー型のダンパとして機能することになる。なお、可変リリーフ弁22と排出通路21とを設けない場合には、別途、ロッド側室5とタンク7とを接続する通路と、この通路の途中に減衰弁とを設けてダンパ回路Dを構成するようにしてもよい。また、アクチュエータAfの各機器への通電が不能となるようなフェール時には、第一開閉弁9と第二開閉弁11のバルブ9a,11aがバネ9d,11dに押圧されて、それぞれ遮断ポジション9c,11cを採り、可変リリーフ弁22は、開弁圧が最大に固定された圧力制御弁として機能するので、アクチュエータAfは、自動的に、パッシブダンパとして機能することができる。
【0042】
上記のように構成されたアクチュエータAf,Arに所望の伸長方向の推力を発揮させる場合、たとえば、コントローラCは、モータ15を回転させてポンプ12からシリンダ2内へ液体を供給しつつ、各アクチュエータAf,Arの第一開閉弁9を連通ポジション9bとし第二開閉弁11を遮断ポジション11cとする。このようにすることで、ロッド側室5とピストン側室6とが連通状態におかれて両者にポンプ12から液体が供給され、ピストン3が図2中左方へ押されアクチュエータAf,Arは伸長方向の推力を発揮する。ロッド側室5内およびピストン側室6内の圧力が可変リリーフ弁22の開弁圧を上回ると、可変リリーフ弁22が開弁して液体が排出通路21を介してタンク7へ逃げるので、ロッド側室5内およびピストン側室6内の圧力は、可変リリーフ弁22に与える電流量で決まる可変リリーフ弁22の開弁圧にコントロールされる。そして、アクチュエータAf,Arは、ピストン3におけるピストン側室6側とロッド側室5側の受圧面積差に上記した可変リリーフ弁22によってコントロールされるロッド側室5内およびピストン側室6内の圧力を乗じた値の伸長方向の推力を発揮する。
【0043】
これに対して、アクチュエータAf,Arに所望の収縮方向の推力を発揮させる場合、コントローラCは、モータ15を回転させてポンプ12からロッド側室5内へ液体を供給しつつ、各アクチュエータAf,Arの第一開閉弁9を遮断ポジション9cとし第二開閉弁11を連通ポジション11bとする。このようにすることで、ピストン側室6とタンク7が連通状態におかれるとともにロッド側室5にポンプ12から液体が供給されるので、ピストン3が図2中右方へ押されアクチュエータAf,Arは収縮の推力を発揮する。上記したところと同様に、可変リリーフ弁22の電流量を調節することで、アクチュエータAfは、ピストン3におけるロッド側室5側の受圧面積と可変リリーフ弁22にコントロールされるロッド側室5内の圧力を乗じた収縮方向の推力を発揮する。
【0044】
また、このアクチュエータAf,Arにあっては、アクチュエータとして機能するのみならず、モータ15の駆動状況に関わらず、第一開閉弁9と第二開閉弁11の開閉のみでダンパとしても機能させることができるので、面倒かつ急峻な弁の切換動作を伴うことが無いので、応答性および信頼性が高いシステムを提供することができる。
【0045】
なお、このアクチュエータAf,Arにあっては、片ロッド型に設定されているので、両ロッド型のアクチュエータに比較してストローク長を確保しやすく、アクチュエータの全長が短くなって、鉄道車両への搭載性が向上する。
【0046】
また、このアクチュエータAf,Arにおけるポンプ12からの液体供給および伸縮作動による液体の流れは、ロッド側室5、ピストン側室6を順に通過して最終的にタンク7へ還流するようになっており、ロッド側室5あるいはピストン側室6内に気体が混入しても、アクチュエータAf,Arの伸縮作動によって自立的にタンク7へ排出されるので、推進力発生の応答性の悪化を阻止できる。
【0047】
したがって、アクチュエータAf,Arの製造にあたって、面倒な油中での組立や真空環境下での組立を強いられることが無く、液体の高度な脱気も不要となるので、生産性が向上するとともに製造コストを低減することができる。
【0048】
さらに、ロッド側室5あるいはピストン側室6内に気体が混入しても、気体は、アクチュエータAf,Arの伸縮作動によって自立的にタンク7へ排出されるので、性能回復のためのメンテナンスを頻繁に行う必要もなくなり、保守面における労力とコスト負担を軽減することができる。
【0049】
つづいて、コントローラCは、図1から図3に示すように、車体前側としての車体前部Bfの車両進行方向に対して水平横方向の前側の横方向加速度αfを検出する前側加速度センサ40と、車体後側としての車体後部Brの車両進行方向に対して後側の水平横方向の横方向加速度αrを検出する後側加速度センサ41と、横方向加速度αfと横方向加速度αrに含まれる曲線走行時の定常加速度、ドリフト成分やノイズを除去するバンドパスフィルタ42,43と、バンドパスフィルタ42,43で濾過した横方向加速度αfと横方向加速度αrを処理して、各アクチュエータAf,Arのモータ15、第一開閉弁9のソレノイド9e、第二開閉弁11のソレノイド11e、可変リリーフ弁22の比例ソレノイド22cへ制御指令を出力する制御部44とを備えて構成されていて、各アクチュエータAf,Arの推力を制御するようになっている。なお、バンドパスフィルタ42,43で横方向加速度αfと横方向加速度αrに含まれる曲線走行時の定常加速度が除去されるので、乗り心地を悪化させる振動のみを抑制することができる。
【0050】
制御部44は、前側加速度センサ40で検知した前側の横方向加速度αfと後側加速度センサ41で検知した後側の横方向加速度αrに基づいて前後の台車Tf,Trの直上における車体中心G周りのヨー加速度ωを求めるヨー加速度演算部44aと、横方向加速度αfと横方向加速度αrに基づいて車体Bの中心Gのスエー加速度βを求めるスエー加速度演算部44bと、鉄道車両の走行中の区間種類を判断する区間判断手段としての区間判断部44cと、ヨー加速度ωとスエー加速度βと区間判断部44cの判断結果に基づいて前後のアクチュエータAf,Arで個々に発生すべき推力である推力指令値Ff,Frを求める指令演算部44dと、推力指令値Ff,Frに基づいてモータ15、第一開閉弁9のソレノイド9e、第二開閉弁11のソレノイド11e、可変リリーフ弁22の比例ソレノイド22cを駆動する駆動部44eとを備えて構成されている。
【0051】
なお、コントローラCは、ハードウェア資源としては、図示はしないが具体的にはたとえば、前側加速度センサ40と後側加速度センサ41が出力する信号を取り込むためのA/D変換器と、バンドパスフィルタ42,43と、バンドパスフィルタ42,43で濾過した横方向加速度αfと横方向加速度αrを取り込んでアクチュエータAf,Arを制御するのに必要な処理に使用されるプログラムが格納されるROM(Read Only Memory)等の記憶装置と、上記プログラムに基づいた処理を実行するCPU(Central Processing Unit)などの演算装置と、上記CPUに記憶領域を提供するRAM(Random Access Memory)等の記憶装置とを備えて構成されればよく、コントローラCの制御部44における各部は、CPUが上記処理を行うためのプログラムを実行することで実現することができる。また、バンドパスフィルタ42,43は、上記CPUがプログラムを実行することで実現されてもよい。
【0052】
つづいて、横方向加速度αf,αrは、たとえば、図1中車体Bの中央を左右に通る軸を基準として上方側へ向く方向となる場合に、正の符号を採り、反対に、図1中車体Bの中央を左右に通る軸を基準として下方側へ向く方向となる場合に、負の符号を採るように設定され、ヨー加速度演算部44aは、前側の横方向加速度αfと後側の横方向加速度αrの差を2で割ることで前後の台車Tf,Trのそれぞれの直上における車体中心G周りのヨー加速度ωを求め、スエー加速度演算部44bは、横方向加速度αfと横方向加速度αrの和を2で割って車体Bの中心Gのスエー加速度βを求める。前側加速度センサ40と後側加速度センサ41の設置箇所は、ヨー加速度ωを求める都合上、前側加速度センサ40にあっては車体Bの中心Gを含む前後方向または対角方向に沿う線上であって前側アクチュエータAfの近傍に配置されるとよく、後側加速度センサ41にあっても車体Bの中心Gを含む前後方向または対角方向に沿う線上であって後側アクチュエータArの近傍に配置されるとよいが、中心Gと前側加速度センサ40と後側加速度センサ41の距離と位置関係と横方向加速度αf,αrとからヨー加速度ωを求めることができるので前側加速度センサ40と後側加速度センサ41を任意に設定することも可能である。その場合、ヨー加速度ωは、横方向加速度αfと横方向加速度αrの差を2で割って求めるのではなく、上記横方向加速度αfと横方向速度αrの差と、車体Bの中心Gと各加速度センサ40,41との距離、位置関係からヨー加速度ωを得るようにすればよい。具体的には、前側加速度センサ40と車体Bの中心Gとの前後方向距離Lfと、前側加速度センサ41と車体Bの中心Gとの前後方向距離Lrとすると、ヨー加速度ωは、ω=(αf−αr)/(Lf+Lr)で計算できる。本実施の形態では、ヨー加速度ωを前側加速度センサ40と前側加速度センサ41で加速度を検知して求めているが、ヨー加速度センサを用いて検知するようにしてもよい。
【0053】
区間判断部44cは、モータ15の目標回転速度Vrefと実際の回転速度Vの速度差である速度偏差εに基づいて、鉄道車両の走行中の区間種類が明り区間であるかトンネル区間を判断するようになっている。明り区間は、いわゆる、トンネル以外の区間のことであり、非トンネル区間の総称である。
【0054】
以下、区間判断部44cにおける判断について詳細に説明するが、この判断の説明の前に、制御部44がモータ15を一定回転速度で駆動するための制御内容について少々説明する。このモータ15の駆動は、制御部44における駆動部44eによって行われており、モータ15は、駆動部44eによって一定回転速度で回転駆動されるようになっている。
【0055】
具体的には、制御部44は、モータ15の回転速度をレゾルバやホール素子等で構成されるモータ15における図外のロータの回転位置を検出する回転位置センサ45を用いてセンシングしており、駆動部44eは、この回転位置センサ45で検知した回転位置から回転速度Vを得て、この回転速度Vをフィードバックしてモータ15を制御している。より詳細には、駆動部44eは、モータ15を一定回転速度で駆動するために検知したモータ15の回転速度Vをフィードバックするために回転速度Vを負帰還する速度ループと、速度ループ内に設けた電流ループとモータ15の図外の巻線へ電圧を印加するための図外のドライバとを備えている。速度ループでは、上記したモータ15の一定回転速度を目標回転速度Vrefとし、この目標回転速度Vrefと回転速度Vの速度偏差εをPI補償やPID補償する等して目標電流値を求め、これを図示しない電流ループへ入力する。電流ループでは、モータ15に流れる実電流をフィードバックして最終的に上記ドライバへ与える電圧指令値を生成し、駆動部44eは、ドライバを通じてモータ15内の図外の巻線へ電圧を印加してモータ15を制御するようになっている。
【0056】
このように駆動部44eでは、モータ15を一定回転速度で駆動するようになっているのであるが、鉄道車両がトンネル区間を走行する場合、車体B周りの空気の流れの乱れによって車体Bに大きな外力が作用する。そのため、車体Bは、トンネル区間走行中では明り区間走行中よりも大きな振幅で振動する。
【0057】
この車体Bに作用する外力は、アクチュエータAf,Arにも作用し、ロッド側室5内の圧力に変動が生じたり、車体Bの振動を抑制するためにアクチュエータAf,Arに出力させる推力も大きく変動したりするため、これらがポンプ12の吐出圧力に影響し、ポンプ12の回転速度も振動的になる。ポンプ12の回転速度が振動的となると、当然に、これに接続されるモータ15の回転速度もトンネル区間では、明り区間に比較して振動的となって、実際の回転速度Vと目標回転速度Vrefの速度偏差εは、トンネル区間走行中では、明り区間走行中よりも大きくなる傾向にある。
【0058】
したがって、目標回転速度Vrefとモータ15の実際の回転速度Vとの差である速度偏差εの絶対値が大きい場合に、鉄道車両がトンネル区間を走行中であると判断することができる。
【0059】
そこで、区間判断部44cは、目標回転速度Vrefとモータ15の実際の回転速度Vとの差である速度偏差εの絶対値が速度閾値Vbを超えると、鉄道車両がトンネル区間を走行中であると判断し、速度偏差εの絶対値が速度閾値Vb以下である場合には、鉄道車両が明り区間を走行中であると判断する。この場合の速度閾値Vbは、実際に鉄道車両を走行させて明り区間走行中の速度偏差εのデータとトンネル区間走行中の速度偏差εのデータを実験的に収集して、上記判断に最適となるように設定すればよく、たとえば、トンネル区間走行中の速度偏差εの平均値や平均値−標準偏差×a(a=1,2)で演算される値や期待値としたり、明り区間走行中の速度偏差εの上限値や平均値+標準偏差×a(a=1,2)で演算される値としたりすることもできる。なお、目標回転速度Vrefは、図3に示すように、都度、駆動部44eから得るようにしてもよいし、他から得てもよいし、さらには、予め区間判断部44cで記憶しておくようにしてもよい。
【0060】
このように、鉄道車両用制振装置1では、鉄道車両の走行位置をモニタせずとも区間種類を判断することができるので、他の装置から走行位置情報を入手する必要がない。
【0061】
ところで、区間判断部44cは、上記の如くの判断によって、鉄道車両が走行中の区間種類を判断することができるが、目標回転速度Vrefと一回のサンプリングで得た回転速度Vとの速度偏差εの絶対値が速度閾値Vbを超えるとトンネル区間であると判断する場合、何らかの外乱によって車体Bが大きく振動してもトンネル区間であると判断し、トンネル区間の走行中でも速度偏差εが速度閾値Vb以下では明り区間と判断することになる。より区間種類の判断の正確度を向上するためには、速度偏差εの二乗平均平方根を求め、当該二乗平均平方根が所定の速度閾値Vbを超えると鉄道車両の走行中の区間がトンネル区間であると判断し、速度閾値Vb以下であると当該走行中の区間を明り区間であると判断する。この場合の速度閾値Vbは、速度偏差εの二乗平均平方根の値から区間種類を判断するために設定されるものであるから、上記した速度偏差εの絶対値に対して設定される速度閾値Vbと同じ値に設定されるとは限らない。速度偏差εの二乗平均平方根は、予め決められた個数の速度偏差εの二乗の総和を上記個数で割った値の平方根を求めることで得ることができる。速度偏差εの二乗平均平方根を得るための速度偏差εの個数は、サンプリングタイム、制御周波数や区間判断部44cにおける判断に要する時間に応じて任意に設定されるが、たとえば、0.5秒間から2秒間にサンプリングされる個数に設定される。
【0062】
このように、速度偏差εの二乗平均平方根を判断に用いることで、瞬間的に速度偏差εの絶対値が大きくなったり小さくなったりしても、速度偏差εの二乗平均平方根に与える影響は小さくなるから、この速度偏差εの二乗平均平方根と速度閾値Vbとを比較することで、何らかの外乱によって瞬間的に車体Bが大きく振動してもトンネル区間で判断されにくくなり、トンネル区間の走行中に速度偏差εが瞬間的に速度閾値Vb以下となっても明り区間と判断されにくくなるので、鉄道車両の走行中の区間種類をより正確に判断することができる。なお、この速度偏差εの二乗平均平方根を用いて判断する場合、速度閾値Vbは、実際に鉄道車両を走行させて明り区間走行中の速度偏差εの二乗平均平方根のデータとトンネル区間走行中の速度偏差εの二乗平均平方根のデータを実験的に収集して、上記判断に最適となるように設定すればよく、たとえば、トンネル区間走行中の速度偏差εの二乗平均平方根の平均値や平均値−標準偏差×a(a=1,2)で演算される値や期待値としたり、明り区間走行中の速度偏差εの二乗平均平方根の上限値や平均値+標準偏差×a(a=1,2)で演算される値としたりすることもできる。
【0063】
なお、区間判断部44cでの判断において、トンネル区間であると判断された後、明り区間と判断するためには、複数回連続して明り区間であると判断されることを要するようにしてもよい。
【0064】
以上のように、区間判断部44cは、鉄道車両が走行中の区間種類が明り区間であるかトンネル区間であるかを判断することができるが、この実施の形態では、アクチュエータAf,Arの推力の絶対値が推力閾値を超えるか否かをも判定していて、明り区間が直線区間であるか曲線区間であるか、さらに、鉄道車両用制振装置1に異常があるか否かをも判断することができるようになっている。
【0065】
詳しくは、区間判断部44cは、速度偏差εを用いた上記の区間種類判断に加えて、アクチュエータAf,Arの推力の絶対値が推力閾値Fcを超えるか否かも判定している。アクチュエータAf,Arが実際に出力している推力は、モータMの図示しない出力シャフトのトルクを観測することで得ることができる。モータ15の出力シャフトはポンプ12の入力軸に連結されており、ポンプ12の吐出圧がロッド側室5の圧力となっているため、モータ15の出力シャフトのトルクを観測することで、アクチュエータAf,Arとトルクとの関係を予め得ておけば、アクチュエータAf,Arが出力している推力を得ることができる。なお、上記したトルクには、ポンプ12の可動部における動摩擦力による成分が含まれているため、この成分が無視できなければ演算によって除去するようにすればよい。無論、可変リリーフ弁22の開弁圧を制御しているので、可変リリーフ弁22の比例ソレノイド22cに供給する電流量によっても推定することができる。また、モータ15のトルクは、モータ15に流れる電流に比例する関係にあるから、モータ15に流れる電流を観測してアクチュエータAf,Arの推力を得てもよい。
【0066】
そして、区間判断部44cは、図4に示すように、鉄道車両の走行中の区間種類が明り区間と判断する場合であって、アクチュエータAf,Arの推力の絶対値が推力閾値Fcを超える場合、区間種類を曲線区間であると判断(図4中領域Y)し、そうでなければ、つまり、アクチュエータAf,Arの推力の絶対値が推力閾値以下である場合、区間種類を直線区間であると判断(図4中領域W)する。一般に曲線区間では、車体Bにはカントによっては緩和できない超過遠心加速度と称される定常加速度が作用するが、この定常加速度によって生じる車体Bの振動の周波数帯は、そもそも乗心地を向上するために抑制したい車体Bの振動の周波数帯に近いため、バンドパスフィルタ42,43で完全に定常加速度を除去することが難しく、結果、曲線区間では外乱による車体Bの振動に定常加速度が重畳される。したがって、直線区間におけるアクチュエータAf,Arの推力の絶対値よりも曲線区間におけるアクチュエータAf,Arの推力の絶対値の方が大きくなる傾向にある。そして、推力閾値は、たとえば、実際に鉄道車両を走行させて明り区間中の直線区間を走行中のアクチュエータAf,Arの推力のデータと明り区間中の曲線区間を走行中のアクチュエータAf,Arの推力のデータを実験的に収集して、上記判断に最適となるように設定すればよく、たとえば、曲線区間走行中のアクチュエータAf,Arの推力の絶対値における下限値や平均値−標準偏差×a(a=1,2)で演算される値や期待値としたり、直線区間走行中のアクチュエータAf,Arの推力の絶対値における上限値や平均値+標準偏差×a(a=1,2)で演算される値としたりすることもできる。
【0067】
以上より、明り区間であっても、アクチュエータAf,Arの推力の絶対値が推力閾値Fcを超えることで、鉄道車両用制振装置1は、鉄道車両が走行している区間の種類が明り区間中のうち曲線区間であるか、直線区間であるかを判断することができる。
【0068】
また、区間判断部44cは、鉄道車両の走行中の区間種類がトンネル区間と判断する場合であって、アクチュエータAf,Arの推力の絶対値が推力閾値Fc以下の場合、鉄道車両用制振装置1が失陥していると判断(図4中領域Z)する。トンネル区間では、アクチュエータAf,Arの推力の絶対値は大きくなるため、当該絶対値が推力閾値Fcよりも大きい場合には、トンネル区間を走行中であって鉄道車両用制振装置1が正常に機能していると考えられ(図4中領域X)、反対に、当該絶対値が推力閾値Fc以下の場合には、トンネル区間を走行中であってもアクチュエータAf,Arの推力が小さくなってことから、鉄道車両用制振装置1が失陥状態であると判断(図4中領域Z)することができる。失陥と判断される場合、そのまま車体Bの振動を抑制する制御を継続すると、車体Bを加振してしまったり、車両における乗り心地を悪化させたりする可能性があるため、鉄道車両用制振装置1は、モータ15、第一開閉弁9、第二開閉弁11および可変リリーフ弁22への電力供給を停止して上述のダンパ回路Dを有効にし、アクチュエータAf,Arをパッシブなダンパとして機能させる。このように失陥時にはアクチュエータAf,Arをパッシブなダンパとして機能させることで、失陥時においてもアクチュエータAf,Arに減衰力を発揮させて車体Bの振動を抑制することができる。
【0069】
なお、上記した直線区間と曲線区間の別と失陥の判断は、アクチュエータAf,Arの推力の代わりにアクチュエータAf,Arの推力指令値Ff,Frを用いても同様に行うことができる。
【0070】
次に、指令演算部44dは、この実施の形態では、図5に示すように、H∞制御器44d1,44d2を含んで構成されており、ヨー加速度演算部44aが演算したヨー加速度ωから車体Bのヨーを抑制するヨー指令値Fωを演算するH∞制御器44d1と、スエー加速度演算部44bが演算したスエー加速度βから車体Bのスエーを抑制するスエー指令値Fβを演算するH∞制御器44d2と、ヨー指令値Fωとスエー指令値Fβとを加算して前側のアクチュエータAfが出力すべき推力を指示する推力指令値Ffを求める加算器44d3と、スエー指令値Fβからヨー指令値Fωを減算して後側のアクチュエータArが出力すべき推力を指示する推力指令値Frを求める減算器44d4とを備えて構成されている。
【0071】
H∞制御器44d1,44d2は、直線区間走行用の制御ゲイン、曲線区間用の制御ゲイン、トンネル区間用の制御ゲインを保有しており、上記した区間判断部44cの判断結果に応じて、対応する制御ゲインを選択してヨー指令値Fωとスエー指令値Fβを演算する。
【0072】
なお、ヨー指令値Fωを演算する際に使用される制御ゲインは、直線区間用よりも曲線区間用を大きくし、さらに、曲線区間用よりもトンネル区間用を大きくするといったように、それぞれの区間に最適となる値に設定しておくとよい。また、スエー指令値Fβを演算する際に使用される制御ゲインについても同様にそれぞれの区間に最適となる値に設定されるが、曲線区間ではスエー加速度βに定常加速度が含まれているので直線区間用の制御ゲインよりも曲線区間用の制御ゲインを小さくしておくとよく、さらに、トンネル区間用の制御ゲインは直線区間用の制御ゲインよりも大きくしておくとよい。
【0073】
上記した指令演算部44dでは、H∞制御を行うようになっているので、車体Bに入力される振動の周波数によらず高い制振効果を得ることができ、高いロバスト性を得ることができる。なお、このことは、H∞制御以外の制御を用いることを否定するものではない。したがって、たとえば、横方向加速度αf,αrから横方向速度を得て、横方向速度にスカイフック減衰係数を乗じて推力指令値を求めるスカイフック制御を用いて前後のアクチュエータAf,Arを制御することもできる。また、制御にあたって、ヨー加速度ωとスエー加速度βから、前側のアクチュエータAfと後側のアクチュエータArとを関連させてその推力を制御するようにしているが、前側のアクチュエータAfと後側のアクチュエータArの制御を独立させて制御することも可能である。
【0074】
そして、駆動部44eでは、推力指令値Ff,Fr通りに各アクチュエータAf,Arに推力を発揮させるべく、これらアクチュエータAf,Arへ制御指令を与える。具体的には、駆動部44eは、推力指令値Ff,Frから、モータ15、各アクチュエータAf,Arの第一開閉弁9のソレノイド9e、第二開閉弁11のソレノイド11eおよび可変リリーフ弁22の比例ソレノイド22cへ与えるべき制御指令を求めて当該制御指令を出力することになる。また、推力指令値Ff,Frから制御指令を求める際、現在アクチュエータAf,Arが出力している推力をフィードバックして制御指令を求めてもよい。
【0075】
より詳細には、駆動部44eは、上記のように、推力指令値Ff,Frから各アクチュエータAf,Arの第一開閉弁9のソレノイド9e、第二開閉弁11のソレノイド11e、可変リリーフ弁22の比例ソレノイド22cへ与えるべき制御指令を求めて当該制御指令を出力する。
【0076】
かくして、この鉄道車両用制振装置1は、区間判断手段である区間判断部44cによって鉄道車両が走行中である区間種類が明り区間かトンネル区間のいずれかであるかを判断し、この判断結果に基づいて、鉄道車両が走行中である区間種類に適した制御ゲインを選択して推力指令値Ff,Frを求めてアクチュエータAf,Arを制御することで、区間種類によって異なる振動モードで振動する鉄道車両の車体Bを効果的に制振することができるのである。
【0077】
したがって、この鉄道車両用制振装置1によれば、区間判断手段である区間判断部44cがモータ15の目標回転速度Vrefと実際の回転速度Vの速度差である速度偏差εに基づいて、鉄道車両の走行中の区間種類が明り区間であるかトンネル区間を判断するようになっているから、車両モニタ装置等の他の機器から鉄道車両の走行位置情報や区間種類情報を得ずとも区間種類を判断することができる。
【0078】
また、鉄道車両用制振装置1によれば、車両モニタ装置等の他の機器から鉄道車両の走行位置情報や区間種類情報を得る必要がないので、車両モニタ装置等に接続するためのインターフェースが不要となり、在来線のように車両情報伝送設備の整っていない鉄道車両であっても容易に搭載することができる。
【0079】
さらに、この実施の形態では、区間判断手段である区間判断部44cは、明り区間をさらに直線区間と曲線区間とに分けて判断することができるので、より区間種類に適した制御ゲインの選択が可能となり、鉄道車両の車体Bをより一層効果的に制振することができる。
【0080】
そして、区間判断手段である区間判断部44cは、鉄道車両の走行中の区間種類がトンネル区間と判断する場合であって、アクチュエータAf,Arの推力或いは推力指令値が推力閾値以下の場合、鉄道車両用制振装置1が失陥した状態であると判断するので、失陥状態で車体Bの振動を抑制する制御を継続してしまうことがない。また、アクチュエータAf,Arがダンパとして機能できる場合には、失陥であると判断した際に、アクチュエータAf,Arをパッシブなダンパとすることで失陥しても車体Bの振動を減衰力で抑制することができる。
【0081】
また、速度偏差εの二乗平均平方根を求め、当該二乗平均平方根が所定の速度閾値Vbを超えると上記鉄道車両の走行位置をトンネル区間であると判断し、上記速度閾値Vb以下であると当該走行位置を明り区間であると判断する場合には、鉄道車両用制振装置1は、鉄道車両の走行中の区間種類をより正確に判断することができ、区間種別が頻繁に入れ替わるような判断が防止され、車体Bの振動モードにより適した制御ゲインの安定的に選択して車体Bの振動を安定的に抑制することができる。
【0082】
さらに、本実施の形態の鉄道車両用制振装置1では、曲線区間であると判断する場合、スエー指令値Fωを求める際の制御ゲインを明り区間であって曲線区間ではない場合の制御ゲインよりも低くするので、バンドパスフィルタ41,42では除去しがたい定常加速度の影響を低減して、曲線区間走行中の鉄道車両における乗心地を飛躍的に向上することができる。
【0083】
なお、上記したところでは、一つのコントローラCで複数のアクチュエータAf,Arを制御するようにしているが、アクチュエータAf,Ar毎にコントローラCを設けて制御するようにしてもよいことは当然である。
【0084】
以上で、本発明の実施の形態についての説明を終えるが、本発明の範囲は図示されまたは説明された詳細そのものには限定されないことは勿論である。
【産業上の利用可能性】
【0085】
本発明は、鉄道車両等の制振に利用可能である。
【符号の説明】
【0086】
1 鉄道車両用制振装置
2 シリンダ
3 ピストン
4 ロッド
5 ロッド側室
6 ピストン側室
7 タンク
8 第一通路
9 第一開閉弁
10 第二通路
11 第二開閉弁
12 ポンプ
15 モータ
16 供給通路
17 逆止弁
18 整流通路
19 吸込通路
21 排出通路
22 可変リリーフ弁
44c 区間判断手段としての区間判断部
Af 前側のアクチュエータ
Ar 後側のアクチュエータ
B 車体
Tf,Tr 台車
【特許請求の範囲】
【請求項1】
鉄道車両の台車と車体の一方に連結されるシリンダと、当該シリンダ内に摺動自在に挿入されるピストンと、上記シリンダ内に挿入されて上記ピストンと上記台車と車体の他方に連結されるロッドと、上記シリンダ内に上記ピストンで区画したロッド側室とピストン側室と、タンクと、上記ロッド側室と上記ピストン側室とを連通する第一通路の途中に設けた第一開閉弁と、上記ピストン側室と上記タンクとを連通する第二通路の途中に設けた第二開閉弁と、上記タンクから上記ロッド側室へ液体を供給するポンプと、当該ポンプを駆動するモータとを有するアクチュエータを備え、上記モータを一定の回転速度で駆動し、当該アクチュエータに出力させるべき推力を推力指令値として求め、上記アクチュエータを制御して車体の振動を抑制する鉄道車両用制振装置において、上記モータの目標回転速度と実際の回転速度の速度偏差に基づいて、上記鉄道車両の走行中の区間種類が明り区間であるかトンネル区間を判断する区間判断手段を備えたこと特徴とする鉄道車両用制振装置。
【請求項2】
上記区間判断手段は、上記鉄道車両の走行中の区間種類が明り区間と判断する場合であって、上記アクチュエータの推力或いは推力指令値が推力閾値を超える場合、上記区間種類を曲線区間であると判断することを特徴とする請求項1に記載の鉄道車両用制振装置。
【請求項3】
上記区間判断手段は、上記鉄道車両の走行中の区間種類がトンネル区間と判断する場合であって、上記アクチュエータの推力或いは推力指令値が推力閾値以下の場合、失陥と判断することを特徴とする請求項1に記載の鉄道車両用制振装置。
【請求項4】
上記速度偏差の二乗平均平方根を求め、当該二乗平均平方根が所定の速度閾値Vbを超えると上記鉄道車両の走行位置をトンネル区間であると判断し、上記速度閾値Vb以下であると当該走行位置を明り区間であると判断することを特徴とする請求項1から3のいずれか一項に記載の鉄道車両用制振装置。
【請求項5】
上記車体の中心周りのヨー加速度と上記車体の水平横方向のスエー加速度を得て、ヨー加速度から車体のヨー振動を抑制するヨー推力指令値を求め、スエー加速度から車体のスエー振動を抑制するスエー指令値を求め、ヨー指令値とスエー指令値から上記推力指令値を演算してなり、上記区間判断手段が曲線区間であると判断する場合、スエー指令値を求める際の制御ゲインを明り区間であって曲線区間ではない場合の制御ゲインよりも低くすることを特徴とする請求項4に記載の鉄道車両用制振装置。
【請求項6】
上記アクチュエータは、上記ロッド側室を上記タンクへ接続する排出通路と、当該排出通路の途中に設けられ開弁圧を変更可能な可変リリーフ弁とを備え、当該可変リリーフ弁の開弁圧を調節して上記アクチュエータの推力を制御することを特徴とする請求項1から5のいずれか一項に記載の鉄道車両用制振装置。
【請求項7】
上記タンクから上記ピストン側室へ向かう液体の流れのみを許容する吸込通路と、上記ピストン側室から上記ロッド側室へ向かう液体の流れのみを許容する整流通路とを備えたことを特徴とする請求項1から6のいずれか一項に記載の鉄道車両用制振装置。
【請求項1】
鉄道車両の台車と車体の一方に連結されるシリンダと、当該シリンダ内に摺動自在に挿入されるピストンと、上記シリンダ内に挿入されて上記ピストンと上記台車と車体の他方に連結されるロッドと、上記シリンダ内に上記ピストンで区画したロッド側室とピストン側室と、タンクと、上記ロッド側室と上記ピストン側室とを連通する第一通路の途中に設けた第一開閉弁と、上記ピストン側室と上記タンクとを連通する第二通路の途中に設けた第二開閉弁と、上記タンクから上記ロッド側室へ液体を供給するポンプと、当該ポンプを駆動するモータとを有するアクチュエータを備え、上記モータを一定の回転速度で駆動し、当該アクチュエータに出力させるべき推力を推力指令値として求め、上記アクチュエータを制御して車体の振動を抑制する鉄道車両用制振装置において、上記モータの目標回転速度と実際の回転速度の速度偏差に基づいて、上記鉄道車両の走行中の区間種類が明り区間であるかトンネル区間を判断する区間判断手段を備えたこと特徴とする鉄道車両用制振装置。
【請求項2】
上記区間判断手段は、上記鉄道車両の走行中の区間種類が明り区間と判断する場合であって、上記アクチュエータの推力或いは推力指令値が推力閾値を超える場合、上記区間種類を曲線区間であると判断することを特徴とする請求項1に記載の鉄道車両用制振装置。
【請求項3】
上記区間判断手段は、上記鉄道車両の走行中の区間種類がトンネル区間と判断する場合であって、上記アクチュエータの推力或いは推力指令値が推力閾値以下の場合、失陥と判断することを特徴とする請求項1に記載の鉄道車両用制振装置。
【請求項4】
上記速度偏差の二乗平均平方根を求め、当該二乗平均平方根が所定の速度閾値Vbを超えると上記鉄道車両の走行位置をトンネル区間であると判断し、上記速度閾値Vb以下であると当該走行位置を明り区間であると判断することを特徴とする請求項1から3のいずれか一項に記載の鉄道車両用制振装置。
【請求項5】
上記車体の中心周りのヨー加速度と上記車体の水平横方向のスエー加速度を得て、ヨー加速度から車体のヨー振動を抑制するヨー推力指令値を求め、スエー加速度から車体のスエー振動を抑制するスエー指令値を求め、ヨー指令値とスエー指令値から上記推力指令値を演算してなり、上記区間判断手段が曲線区間であると判断する場合、スエー指令値を求める際の制御ゲインを明り区間であって曲線区間ではない場合の制御ゲインよりも低くすることを特徴とする請求項4に記載の鉄道車両用制振装置。
【請求項6】
上記アクチュエータは、上記ロッド側室を上記タンクへ接続する排出通路と、当該排出通路の途中に設けられ開弁圧を変更可能な可変リリーフ弁とを備え、当該可変リリーフ弁の開弁圧を調節して上記アクチュエータの推力を制御することを特徴とする請求項1から5のいずれか一項に記載の鉄道車両用制振装置。
【請求項7】
上記タンクから上記ピストン側室へ向かう液体の流れのみを許容する吸込通路と、上記ピストン側室から上記ロッド側室へ向かう液体の流れのみを許容する整流通路とを備えたことを特徴とする請求項1から6のいずれか一項に記載の鉄道車両用制振装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−1306(P2013−1306A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−136163(P2011−136163)
【出願日】平成23年6月20日(2011.6.20)
【出願人】(000000929)カヤバ工業株式会社 (2,151)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月20日(2011.6.20)
【出願人】(000000929)カヤバ工業株式会社 (2,151)
【Fターム(参考)】
[ Back to top ]