
鉱山機械の管理システム及び鉱山機械の管理方法
【課題】鉱山において、鉱山機械が走行した経路を区別して特定すること。
【解決手段】鉱山機械の管理システム1において、管理装置10は、管理側無線通信装置18を介してダンプトラック20の稼働情報を収集する。ダンプトラック20の稼働情報に含まれる、ダンプトラック20が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報に基づき、ダンプトラック20が走行した経路Rg、Rrを特定する。
【解決手段】鉱山機械の管理システム1において、管理装置10は、管理側無線通信装置18を介してダンプトラック20の稼働情報を収集する。ダンプトラック20の稼働情報に含まれる、ダンプトラック20が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報に基づき、ダンプトラック20が走行した経路Rg、Rrを特定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、鉱山機械を管理するシステム及び方法に関する。
【背景技術】
【0002】
土木作業現場又は鉱山の採石現場では、油圧ショベル、ダンプトラック等、様々な建設機械が稼働する。近年においては、無線通信によって建設機械の稼働情報を取得し、建設機械の状態を把握することが行われつつある。例えば、特許文献1には、GPS(Global Positioning System)情報を使い、積込地点及び積み卸し地点のみの一致で輸送車両のサイクル時間実績を自動収集し、その後の配車計画を算出する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−244247号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1は、配車計画を目的としているため、積込地点及び積み卸し地点のみの評価になる。しかし、生産性向上のための走路設計評価又は運転者の運転指導等を目的とする場合、走行経路毎の解析が必要になり、積込地点及び積み卸し地点のみの評価では不十分である。
【0005】
本発明は、鉱山において、鉱山機械が走行した経路を区別して特定することを目的とする。また、本発明は、鉱山機械の生産性評価や鉱山機械の運転者の運転指導を行うことを目的とする。
【課題を解決するための手段】
【0006】
本発明は、鉱山で作業する鉱山機械に搭載されて、前記鉱山機械の稼働状態に関する稼働情報を収集する車載情報収集装置と、前記鉱山機械に搭載されて通信を行う車載無線通信装置と、前記車載無線通信装置と通信する管理側無線通信装置と、前記車載無線通信装置と前記管理側無線通信装置とを介して前記稼働情報を収集する管理装置と、を含み、前記管理装置は、前記稼働情報に含まれる、前記鉱山機械が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報に基づき、前記鉱山機械が走行した経路を特定する、ことを特徴とする鉱山機械の管理システムである。
【0007】
本発明は、鉱山で作業する鉱山機械に搭載されて、前記鉱山機械の稼働状態に関する稼働情報を収集する車載情報収集装置と、前記鉱山機械に搭載されて通信を行う車載無線通信装置と、を含み、前車載情報収集装置は、前記稼働情報に含まれる、前記鉱山機械が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報と、予め設定された指定経路の位置情報とに基づき、前記鉱山機械が走行した経路を特定し、前記車載無線通信装置は、特定された前記鉱山機械が走行した経路を管理装置に送信する、ことを特徴とする鉱山機械の管理システムである。
【0008】
本発明において、前記鉱山機械が走行した経路は、排土場における位置情報と、積込場における位置情報と、前記排土場と前記積込場との間における2箇所の位置情報と、に基づいて特定されることが好ましい。
【0009】
本発明において、前記鉱山機械が走行した経路が特定される際に、前記経路に含まれる複数箇所の位置情報の数値が丸められることが好ましい。
【0010】
本発明において、前記稼働情報が収集された鉱山機械が走行したとして特定された経路と、収集された前記稼働情報とを対応付けて記憶する管理側記憶装置を有することが好ましい。
【0011】
本発明において、前記管理装置は、前記稼働情報を解析するにあたって、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から路面の凹凸に関する路面情報を抽出し、抽出した前記路面情報に基づいて路面の整備に関する指標を作成することが好ましい。
【0012】
本発明において、前記管理装置は、前記稼働情報を解析するにあたって、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行中の燃料消費に関する燃費情報を抽出し、抽出した前記燃費情報に基づいて燃料消費に関する指標を作成することが好ましい。
【0013】
本発明において、前記管理装置は、前記稼働情報を解析するにあたって、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行時間と停止時間とを抽出し、抽出した前記走行中時間と前記停止時間とに基づいて鉱山機械の走行速度の改善に関する指標を作成することが好ましい。
【0014】
本発明において、前記管理装置は、前記稼働情報を解析するにあたって、前記走行速度の改善に関する指標に対応する経路を走行した複数の鉱山機械の稼働情報から、所定時間以上の停止に関する長時間停止情報と、前記複数の鉱山機械の異常に関する異常情報とを抽出し、抽出した前記長時間停止情報と前記異常情報とに基づいて、鉱山機械の点検に関する指標を作成することが好ましい。
【0015】
本発明において、前記管理装置は、前記稼働情報を解析するにあたって、前記走行速度の改善に関する指標に対応する経路を走行した鉱山機械の稼働情報から、さらに前記所定時間以上の停止が発生した位置に関する長時間停止位置情報を抽出し、抽出した前記長時間停止情報及び長時間停止位置情報に基づいて、鉱山機械の運転者の勤怠状態に関する疲労確認指標又は前記鉱山機械の経路の変更に関する経路変更指標を作成することが好ましい。
【0016】
本発明において、前記管理装置は、前記稼働情報を解析するにあたって、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報を抽出し、抽出した前記積載量情報に基づいて、過積載の改善又は過小積載の改善を要求する積載改善要求指標を作成することが好ましい。
【0017】
本発明において、前記管理装置は、前記稼働情報を解析するにあたって、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報と、走行中の燃料消費に関する燃費情報と、排土終了から積荷を積載して排土するまでに要した時間に関するサイクル時間情報とを抽出し、抽出した前記積載量情報と、前記燃費情報と、前記サイクル時間情報とに基づいて、鉱山機械を運転する運転者の運転の改善を要求する、運転指導指標を作成することが好ましい。
【0018】
本発明において、前記管理装置は、前記特定された経路の勾配に応じて複数のセクションに分割し、分割された前記セクション毎に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報を解析することが好ましい。
【0019】
本発明は、鉱山で作業する鉱山機械の稼働情報を取得する手順と、前記稼働情報に含まれる、前記鉱山機械が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報に基づき、前記鉱山機械が走行した経路を特定する手順と、を含むことを特徴とする鉱山機械の管理方法である。
【0020】
本発明において、前記鉱山機械が走行した経路は、排土場における位置情報と、積込場における位置情報と、前記排土場と前記積込場との間における2箇所の位置情報と、に基づいて特定されることが好ましい。
【0021】
本発明において、前記鉱山機械が走行した経路が特定される際に、前記経路に含まれる複数箇所の位置情報の数値が丸められることが好ましい。
【0022】
本発明において、前記稼働情報が収集された鉱山機械が走行したとして特定された経路と、収集された前記稼働情報とを対応付けて記憶する管理側記憶装置を有することが好ましい。
【0023】
本発明において、前記経路が特定された後に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から路面の凹凸に関する路面情報を抽出する手順と、抽出した前記路面情報に基づいて路面の整備に関する指標を作成する手順と、を含むことが好ましい。
【0024】
本発明において、前記経路が特定された後に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行中の燃料消費に関する燃費情報を抽出する手順と、抽出した前記燃費情報に基づいて燃料消費に関する指標を作成する手順と、を含むことが好ましい。
【0025】
本発明において、前記経路が特定された後に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行時間と停止時間とを抽出する手順と、抽出した前記走行中時間と前記停止時間とに基づいて鉱山機械の走行速度の改善に関する指標を作成する手順と、を含むことが好ましい。
【0026】
本発明において、前記経路が特定された後に、前記走行速度の改善に関する指標に対応する経路を走行した複数の鉱山機械の稼働情報から、所定時間以上の停止に関する長時間停止情報と、前記複数の鉱山機械の異常に関する異常情報とを抽出する手順と、抽出した前記長時間停止情報と前記異常情報とに基づいて、鉱山機械の点検に関する指標を作成する手順と、を含むことが好ましい。
【0027】
本発明において、前記経路が特定された後に、前記走行速度の改善に関する指標に対応する経路を走行した鉱山機械の稼働情報から、さらに前記所定時間以上の停止が発生した位置に関する長時間停止位置情報を抽出する手順と、抽出した前記長時間停止情報及び長時間停止位置情報に基づいて、鉱山機械の運転者の勤怠状態に関する疲労確認指標又は前記鉱山機械の経路の変更に関する経路変更指標を作成する手順と、を含むことが好ましい。
【0028】
前記経路が特定された後に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報を抽出する手順と、抽出した前記積載量情報に基づいて、過積載の改善又は過小積載の改善を要求する積載改善要求指標を作成する手順と、を含むことが好ましい。
【0029】
前記経路が特定された後に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報と、走行中の燃料消費に関する燃費情報と、排土終了から積荷を積載して排土するまでに要した時間に関するサイクル時間情報とを抽出する手順と、抽出した前記積載量情報と、前記燃費情報と、前記サイクル時間情報とに基づいて、鉱山機械を運転する運転者の運転の改善を要求する運転指導指標を作成する手順と、を含むことが好ましい。
【0030】
前記経路が特定された後に、前記特定された経路の勾配に応じて複数のセクションに分割し、分割された前記セクション毎に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報を解析することが好ましい。
【発明の効果】
【0031】
本発明は、鉱山において、鉱山機械が走行した経路を区別して特定することができる。また、本発明は、鉱山機械の生産性評価や鉱山機械の運転者の運転指導を行うことができる。
【図面の簡単な説明】
【0032】
【図1】図1は、本実施形態に係る鉱山機械の管理システムが適用される現場を示す図である。
【図2】図2は、実施形態1に係る鉱山機械の管理システムが有する管理装置の機能ブロック図である。
【図3】図3は、ダンプトラックの構成を示す図である。
【図4】図4は、車載情報収集装置及びその周辺機器を示す機能ブロック図である。
【図5】図5は、経路の模式図である。
【図6】図6は、本実施形態に係る経路特定処理の手順を示すフローチャートである。
【図7】図7は、経路特定処理においてデータ数を圧縮する手順を示す図である。
【図8】図8は、経路特定処理においてデータ数を圧縮する手順を示す図である。
【図9】図9は、経路特定処理においてデータ数を圧縮する手順を示す図である。
【図10】図10は、位置情報と走行距離等との関係を示す図表である。
【図11】図11は、比較対象位置を特定する処理の手順を示すフローチャートである。
【図12】図12は、比較対象位置を特定する処理を示す模式図である。
【図13】図13は、ダンプトラックが走行する経路のパターンを示す模式図である。
【図14】図14は、経路特定処理の後処理の手順を示すフローチャートである。
【図15】図15は、経路解析の手順を示すフローチャートである。
【図16】図16は、経路解析の手順を示すフローチャートである。
【図17】図17は、経路解析の説明図である。
【図18】図18は、経路解析の説明図である。
【図19】図19は、経路解析の説明図である。
【図20】図20は、経路特定処理の第2変形例を説明するための図である。
【図21】図21は、領域IDと位置情報等との関係を示す図表である。
【図22】図22は、稼働情報を解析して路面整備提案を作成する例を示すフローチャートである。
【図23】図23は、稼働情報の解析の説明に用いる図である。
【図24】図24は、稼働情報を解析して燃費改善提案又は渋滞改善提案を作成する例を示すフローチャートである。
【図25】図25は、稼働情報を解析して経路変更提案、運転者疲労確認提案又は点検提案を作成する例を示すフローチャートである。
【図26】図26は、稼働情報を解析して運転指導指標又は積載改善要求指標を作成する例を示すフローチャートである。
【図27】図27は、鉱山で稼働する複数のダンプトラックを示す図である。
【図28】図28は、図27に示すダンプトラックの運転者と経路とを示す図表である。
【発明を実施するための形態】
【0033】
本発明を実施するための形態(実施形態)につき、図面を参照しつつ詳細に説明する。以下の実施形態に記載した内容により本発明が限定されるものではない。また、以下に記載した構成要素には、当業者が容易に想定できるもの、実質的に同一のものが含まれる。さらに、以下に記載した構成要素は適宜組み合わせることが可能である。また、本発明の要旨を逸脱しない範囲で構成要素の種々の省略、置換又は変更を行うことができる。
【0034】
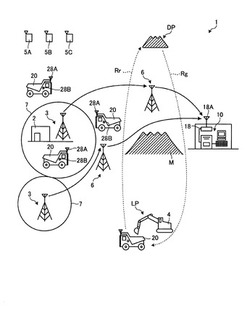
図1は、本実施形態に係る鉱山機械の管理システムが適用される現場を示す図である。鉱山機械の管理システム1は、鉱山機械の状態に関する情報を収集して、鉱山機械の状態を把握したり、生産性向上のために鉱山機械が走行する経路(以下、走行経路とはダンプトラック20が走行する経路と停止する場所とを含めたものであるとし、走行経路を経路と略す)の評価をしたり、鉱山機械の燃費に関する指標を作成したり、鉱山機械の運転者の運転に関する指標を作成したりするものである。鉱山機械とは、鉱山において各種作業に用いる機械類の総称である。本実施形態において、鉱山機械の一種の運搬車両として、砕石又は砕石の採掘時に発生した土砂若しくは岩石等を運搬するダンプトラック20を例とするが、これに限定されるものではない。例えば、本実施形態に係る鉱山機械は、砕石等を採掘する掘削機械として機能する油圧ショベル若しくは電気ショベル又はホイールローダであってもよい。鉱山において、ダンプトラック20は、積込作業が行われる場所(以下、積込場)LPで油圧ショベル4によって岩石又は土砂等が積載される。そして、ダンプトラック20は、積荷の排出作業が行われる場所(以下、排土場)DPで積載した岩石又は土砂等を排土するために降ろす。ダンプトラック20は、積込場LPと排土場DPとの間を、経路Rg、Rrを走行して移動する。
【0035】
<鉱山機械の管理システムの概要>
鉱山機械の管理システム(以下、必要に応じて管理システムという)1は、管理装置10が、無線通信によって鉱山機械としてのダンプトラック20の稼働情報を、ダンプトラック20から収集するものである。管理装置10は、移動体であるダンプトラック20とは異なり、例えば、鉱山の管理施設に設置されている。このように、管理装置10は、原則として移動を考慮していないものである。管理装置10が収集したダンプトラック20の稼働情報は、ダンプトラック20の稼働状態に関する情報であり、例えば、ダンプトラック20の位置情報(緯度、経度及び高度の座標)、走行時間、走行距離、エンジン水温、異常の有無、異常の箇所、燃料消費率又は積載量等である。稼働情報は、主としてダンプトラック20の予防保全及び異常診断等に用いられる。したがって、稼働情報は、鉱山の生産性向上又は鉱山のオペレーションの改善といったニーズに応えるために有用である。
【0036】
管理装置10が、鉱山で作業するダンプトラック20の稼働情報を収集するために、管理装置10には、アンテナ18Aを有する管理側無線通信装置18に接続されている。ダンプトラック20は、稼働情報を送信したり、管理装置10と相互通信を行うために、車載無線通信装置27とともにアンテナ28Aを有している。この他に、ダンプトラック20は、GPS(Global Positioning System:全方位測位システム)衛星5A、5B、5Cからの電波をGPS用アンテナ28Bで受信し、自己位置を測位することができる。なお、自身の位置を計測するためには、GPS衛星に限らず他の測位用衛星によるものでもよい。すなわち、GNSS(全地球航法衛星システム:Global Navigation Satellite System)による位置計測ができればよい。
【0037】
ダンプトラック20がアンテナ28Aから送信する電波の出力は、鉱山全域をカバーできるほどの通信可能範囲を有していない。また、アンテナ28Aから送信する電波は、波長の関係から高い山などの障害物を越えて遠方まで送信することができない。もちろん、高出力の電波を出力できる無線通信装置を用いれば、このような通信障害が解消し、通信可能範囲は広がり通信不可能な場所をなくすことはできるが、鉱山は広大であるため、中継器や通信装置のコストを抑える必要があることや、鉱山がある地域によっては整備された通信インフラを確保することが期待できないといった状況に対応するために、無線LAN(Local Area Network)などの限られた範囲内で情報通信網を形成できる無線システムを用いる。無線LANなどによれば、低コストで鉱山機械と管理施設(情報収集装置10)との相互通信を整えることは可能ではあるものの通信障害の問題を解決する必要がある。
【0038】
ダンプトラック20がアンテナ28Aから送信する電波の到達範囲は限られている。したがって、ダンプトラック20と管理装置10との距離が離れていたり、両者間に山M等の障害物が存在していたりすると、管理側無線通信装置18は、ダンプトラック20から送信される電波を受信することができない。このため、管理システム1は、ダンプトラック20のアンテナ28Aから送信される電波を中継して、管理側無線通信装置18に中継する中継器3を有している。鉱山内の複数個所に中継器3を設置することにより、管理装置10は、自身から離れた位置で稼働しているダンプトラック20から、無線通信により稼働情報等を収集することができる。
【0039】
中継器3から管理側無線通信装置18までの距離が遠い場合、中継器3と管理側無線通信装置18との間に、両者を中継するための中間中継器6が配置される。本実施形態において、中間中継器6は、中継器3と管理側無線通信装置18とを中継するのみであり、ダンプトラック20がアンテナ28Aから送信する電波を中継するものではない。本実施形態において、中間中継器6は、対応する中継器3以外からは電波を中継しないようになっている。例えば、図1に示すように、給油所2の中継器3からの電波を中継するのは、1台の中間中継器6のみである。なお、中間中継器6は、図1では、1つの中継器3と一対一の関係であるように表現しているが、一対一の関係に限定するものではなく、各中間中継器6は、対応する複数の中継器3から送られる電波を中継することができる。
【0040】
中継器3の配置場所を中心とする周囲の所定領域(図1では円形で示す領域)は、ダンプトラック20に搭載された第1無線通信装置(車載無線通信装置27)が中継器3との間で相互に無線通信が可能な範囲、すなわち、通信可能範囲7である。通信可能範囲7に存在しているダンプトラック20は、中継器3等を介して管理側無線通信装置18と相互に無線通信することができる。
【0041】
管理装置10が無線通信によってダンプトラック20から稼働情報等を収集する場合、ダンプトラック20が管理装置10に稼働情報等を送信中にダンプトラック20が走行して移動することによって、ダンプトラック20が通信可能範囲7から出てしまい、管理装置10に送信すべき稼働情報等のすべてを送信する前に通信が中断してしまうことがある。このため、管理装置10が稼働情報等を受信している間、言い換えればダンプトラック20が稼働情報等を送信している間は、ダンプトラック20が通信可能範囲7に存在することが好ましい。このため、ダンプトラック20が確実に通信可能範囲7に存在するように、ダンプトラック20が停止している状態にある場所でダンプトラック20のアンテナ28Aからの電波を受信することが好ましい。したがって、ダンプトラック20が、確実に通信可能範囲7に、ある程度の時間(送信すべき稼働情報等のすべてを送信できる程度の時間以上の時間)停車することが行われる場所で、ダンプトラック20から稼働情報等を中継器3に向けて送信するように制御することが好ましい。
【0042】
このため、本実施形態では、例えば、給油所2に中継器3を設置する。給油所2では、ダンプトラック20のエンジンを駆動するための燃料を給油するために、ダンプトラック20はある程度の時間の停車をすることが見込まれる。このため、管理装置10が給油中のダンプトラック20から稼働情報等を確実に受信するための時間の間、ダンプトラック20は確実に通信可能範囲7に存在した状態を維持することができる。その結果、管理装置10は、無線通信によってダンプトラック20から稼働情報等を確実に収集することができる。なお、鉱山は広大であるため、本実施形態では、給油所2以外にもダンプトラック20の移動経路の近傍に中継器3を配置して、稼働中のダンプトラック20から稼働情報等を収集するようにする。次に、管理装置10について、より詳細に説明する。
【0043】
<管理装置>
図2は、実施形態1に係る鉱山機械の管理システムが有する管理装置の機能ブロック図である。管理装置10は、管理側処理装置12と、管理側記憶装置13と、入出力部(I/O)15とを含む。さらに、管理装置10は、入出力部15に、表示装置16と、入力装置17と、管理側無線通信装置18と、出力装置19とを接続している。管理装置10は、例えば、コンピュータである。管理側処理装置12は、例えば、CPU(Central Processing Unit)である。管理側記憶装置13は、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ若しくはハードディスクドライブ等又はこれらを組み合わせて構成されている。入出力部15は、管理側処理装置12と、管理側処理装置12の外部に接続する表示装置16、入力装置17、管理側無線通信装置18及び出力装置19との情報の入出力(インターフェース)に用いられる。
【0044】
管理側処理装置12は、本実施形態に係る鉱山機械の管理方法を実行する。管理側処理装置12は、走行経路特定部12aと、勾配解析部12bと、路面状態解析部12cと、燃費解析部12dと、渋滞解析部12eと、走行経路解析部12fと、運転者状態解析部12gと、異常解析部12hと、運転解析部12iと、積載量解析部12jとを含む。
【0045】
走行経路特定部12aは、ダンプトラック20が走行した経路を特定する。勾配解析部12bは、ダンプトラック20が走行した経路を解析し、勾配の範囲毎に経路を分割する。路面状態解析部12cは、ダンプトラック20の稼働情報からダンプトラック20が走行する経路の路面の状態を解析する。燃費解析部12dは、ダンプトラック20の稼働情報から、燃費(単位量の燃料で走行できる距離、所定の距離を走行するのに必要な燃料消費の量又は単位時間当たりの燃料消費の量等)に関する情報を抽出して解析する。渋滞解析部12eは、ダンプトラック20の稼働情報から、鉱山内の経路の一部である走行路又は積込場LP等における渋滞の発生の有無等を解析する。走行経路解析部12fは、ダンプトラック20の停止時間及び停止位置等に基づいて、ダンプトラック20が走行する経路を変更すべきか否かを解析する。運転者状態解析部12gは、ダンプトラック20の停止時間及び停止位置等に基づいて、運転者の勤怠状態又は運転者の疲労度等を解析する。異常解析部12hは、ダンプトラック20の稼働情報から、ダンプトラック20に発生した異常の有無や内容等を解析する。運転解析部12iは、ダンプトラック20の稼働情報から、ダンプトラック20の運転者の運転技能を解析する。積載量解析部12jは、ダンプトラック20の稼働情報に含まれる積載量から、ダンプトラック20の積載状態等を解析する。これらの機能は、管理側処理装置12がそれぞれに対応するコンピュータプログラムを管理側記憶装置13から読み込んで実行することにより実現される。
【0046】
管理側記憶装置13は、ダンプトラック20の稼働情報等を収集するための稼働情報収集用コンピュータプログラム、本実施形態に係る鉱山機械の管理方法を実現して、ダンプトラック20が走行した経路を特定する経路特定用コンピュータプログラム、稼働情報等に基づいて各種解析を実現するコンピュータプログラム、ダンプトラック20が走行する経路が記述された経路リスト14R及びダンプトラック20から収集した稼働情報のデータベース(稼働情報データベース)14Iを記憶している。経路リスト14Rは、ダンプトラック20が走行する経路及びダンプトラック20が走行した経路が記述されたデータベースであり、緯度、経度及び高度の座標の集合データで構成されている。
【0047】
本実施形態において、管理装置10は、ダンプトラック20が排土場DPから積荷(砕石又は砕石の採掘時に発生した土砂若しくは岩石等)を積み込むための積込場LPに移動し、再び排土場DPに移動する経路に含まれる、少なくとも4箇所の位置情報に基づき、ダンプトラック20が走行した経路を特定する。すなわち、管理装置10は、少なくとも排土場DPの位置情報、積込場LPの位置情報、排土場DPと積込場LPとの間における2箇所の位置情報、これらに基づいてダンプトラック20が走行した経路を特定する。上述した経路特定用コンピュータプログラムは、前述した少なくとも4箇所の位置情報に基づいてダンプトラック20が走行した経路を特定するための処理を実現するための命令が記述されている。管理装置10、より具体的には管理側処理装置12は、経路特定用コンピュータプログラムを管理側記憶装置13から読み出し、経路特定用コンピュータプログラムに記述されている命令を実行することにより、ダンプトラック20が走行した経路を特定する。管理装置10は、特定した経路を示す情報やデータを管理側記憶装置13に記憶させる。
【0048】
表示装置16は、例えば、液晶ディスプレイ等であり、ダンプトラック20の稼働情報を収集する際に必要な情報を表示する。入力装置17は、例えば、キーボード、タッチパネル又はマウス等であり、ダンプトラック20の稼働情報を収集する際に必要な情報を入力する。管理側無線通信装置18は、アンテナ18Aを有しており、中継器3を介してダンプトラック20の車載無線通信装置27との間で相互に無線通信を実行する。出力装置19は、例えば、印刷装置(プリンタ)である。出力装置19は、管理装置10が作成したレポート等を印刷して出力する。出力装置19は、さらに後述するレポート内容に応じた音声を出力するものであってもよい。次に、ダンプトラック20について、より詳細に説明する。
【0049】
<ダンプトラック>
図3は、ダンプトラックの構成を示す図である。ダンプトラック20は、積荷を積載して走行し、所望の場所でその積荷を排出する。ダンプトラック20は、車両本体21と、ベッセル22と、車輪23と、サスペンションシリンダー24と、回転センサ25と、サスペンション圧力センサ(圧力センサ)26と、アンテナ28Aが接続された車載無線通信装置27と、GPS用アンテナ28Bが接続された位置情報検出装置(本実施形態ではGPS受信機)29と、車載情報収集装置30と、を有する。なお、ダンプトラック20は、上記構成以外にも一般的な運搬機が備えている各種の機構及び機能を備えている。なお、本実施形態1では、前輪(車輪23)で操舵するタイプのダンプトラック20を例として説明するが、車体を前部と後部に分割しそれらを自由関節で結合したアーティキュレート式ダンプトラックにも適用可能である。
【0050】
ダンプトラック20は、ディーゼルエンジン等の内燃機関が発電機を駆動することによって発生した電力で電動機を駆動し、車輪23を駆動する。このように、ダンプトラック20は、いわゆる電気駆動方式であるが、ダンプトラック20の駆動方式はこれに限定されるものではない。ベッセル22は、積荷を積載する荷台として機能するものであり、車両本体21の上部に配置されている。ベッセル22には、積荷として、採石された砕石又は岩若しくは土等が油圧ショベル等の積込機4によって積載される。車輪23は、タイヤとホイールで構成され車両本体21に装着されており、上述したように車両本体21から動力が伝達されることで駆動される。サスペンションシリンダー24は、車輪23と車両本体21との間に配置されている。車両本体21及びベッセル22、さらに積荷が積載された際における積荷の重量に応じた負荷が、サスペンションシリンダー24を介して車輪23に作用する。
【0051】
回転センサ25は、車輪23の回転速度を検出することで車速を計測する。サスペンションシリンダー24は内部に作動油が封入されており、積荷の重量に応じて伸縮動作する。なお、サスペンション圧力センサ(必要に応じて圧力センサともいう)26は、サスペンションシリンダー24に作用する負荷を検出する。圧力センサ26は、ダンプトラック20の各サスペンションシリンダー24に設置されており、その作動油の圧力を検出することで積荷の重量(積載量)を計測することができる。GPS用アンテナ28Bは、GPS(Global Positioning System)を構成する複数のGPS衛星5A、5B、5C(図1参照)から出力される電波を受信する。GPS用アンテナ28Bは、受信した電波を位置情報検出装置29に出力する。位置情報検出装置29は、GPS用アンテナ28Aが受信した電波を電気信号に変換し、自身の位置情報、すなわちダンプトラック20の位置情報を算出(測位)する。車載無線通信装置27は、アンテナ28Aを介して図1に示す中継器3あるいは管理施設のアンテナ18Aとの間で相互に無線通信を行う。車載無線通信装置27は、車載情報収集装置30に接続されている。このような構造により、車載情報収集装置30は、アンテナ28Aを介して各情報を送受信する。次に、車載情報収集装置30及びその周辺機器について説明する。
【0052】
<車載情報収集装置及びその周辺機器>
図4は、車載情報収集装置及びその周辺機器を示す機能ブロック図である。ダンプトラック20が有する車載情報収集装置30は、車載記憶装置31と、車載無線通信装置27と、位置情報検出装置29とが接続されている。車載情報収集装置30には、さらに、状態取得装置が接続されている。車載情報収集装置30は、例えば、CPU(Central Processing Unit)とメモリとを組み合わせたコンピュータである。
【0053】
車載情報収集装置30は、鉱山機械としてのダンプトラック20の様々な稼働状態の情報を取得し、収集するための装置である。例えば、状態取得装置は、サスペンションシリンダー24に設置された圧力センサ26その他の各種センサ類、エンジン制御装置32A、走行制御装置32B、油圧制御装置32C、運転者ID取得装置38及び傾斜センサ(傾斜計)39等である。車載情報収集装置30は、このような状態取得装置からダンプトラック20の様々な稼働状態の情報を取得し、取得したこれらの情報を稼働情報として収集する。
【0054】
例えば、車載情報収集装置30は、エンジン制御装置32Aから燃料噴射装置(FI)34Fの制御量を取得することにより、燃料噴射量を示す情報を取得することができる。燃料噴射量を示す情報によって、燃費に関する情報を得ることができる。また、車載情報収集装置30は、エンジン制御装置32Aを介してアクセル33Aの操作量を示す情報を取得することができる。ダンプトラック20の運転者によるアクセル33Aの操作量を示す情報により、ダンプトラック20の運転者の操作状態を把握することができる。また、車載情報収集装置30は、エンジン制御装置32Aから、エンジン(EG)34Gの回転速度、冷却水温度及び潤滑油圧力等といった各種情報を取得することができる。エンジン(EG)34Gの回転速度の情報は、図示しないエンジン(EG)34Gの出力軸に取り付けられた回転センサ等により検出された回転速度により取得され、冷却水温度及び潤滑油圧力等といった各種情報も、図示しない温度センサや圧力センサにより取得される。
【0055】
また、車載情報収集装置30は、走行制御装置32Bからトランスミッションの状態及びドライブシャフトの回転速度といった、走行装置37の各種情報を得ることができる。また、車載情報収集装置30は、走行制御装置32Bを介してシフトレバー33Bの操作位置又は操作量を取得することにより、ダンプトラック20の運転者の操作状態を把握することができる。シフトレバー33Bは、運転者がダンプトラック20の前進、後進又は走行速度段の変更を走行制御装置32Bに対して指示する際に用いられるものである。
【0056】
さらに、車載情報収集装置30は、油圧制御装置32Cから作動油コントロールバルブ(CV)35の開閉状態を取得することができる。この例において、作動油コントロールバルブ35はベッセル22を昇降させるホイストシリンダー36(油圧シリンダ)に、エンジン34Gの稼働により駆動するオイルポンプ(OP)34Pから吐出される作動油を供給したり、ホイストシリンダー36から作動油を排出したりする。このため、車載情報収集装置30は、作動油コントロールバルブ35の開閉状態に基づいて、ベッセル22の昇降状態を把握することができる。ベッセル22は、運転者がダンプレバー33Cを操作することにより昇降する。このため、車載情報収集装置30は、油圧制御装置32Cを介してダンプレバー33Cの操作量又は操作位置を取得することによっても、ベッセル22の昇降状態を把握することができる。
【0057】
車載情報収集装置30は、圧力センサ26が検出したサスペンションシリンダー24の作動油に作用する圧力を取得することにより、ベッセル22に積載された積荷の重量を把握することができる。ダンプトラック20の各車輪23に備えられた圧力センサ26(車輪23が4輪の場合、4個の圧力センサ26)が示す計測値を合計することで、積荷の重量(積載量)を求めることができる。また、圧力センサ26が検出したサスペンションシリンダー24の作動油に作用する圧力の時系列変化を見ることにより、ダンプトラック20のベッセル22に積荷が積載されているか、ベッセル22から排土中(排土されたか)を知ることができる。例えば、圧力センサ26が検出した圧力が上昇し、所定の値(例えば、ダンプトラック20の規定積載量の半分に相当する値)を超えた場合、積込場LPで積荷の積載を受けていると判断することができる。また、圧力センサ26が検出した圧力が低下し、所定の値(例えば、ダンプトラック20の規定積載量の1/4に相当する値)を下回った場合、排土場DPで排土している(あるいは排土された)と判断することができる。排土又は積載の判断は、圧力センサ26が検出したサスペンションシリンダー24の作動油に作用する圧力に加え、例えば、ダンプレバー33Cの操作状態(操作位置あるいは操作量)又はダンプトラック20の位置情報等を併用することにより、判断の精度を向上させることができる。
【0058】
運転者ID取得装置38は、ダンプトラック20の運転者を特定するための運転者IDを取得するための装置である。ダンプトラック20は、複数の運転者により交代で運転されることがある。運転者IDは、例えば、個々の運転者のIDキー(個人識別情報が記憶された電子キー)又は個々の運転者のIDカード(個人識別情報が記憶されたカード)から取得することができる。この場合、運転者ID取得装置38は、磁気読み取り装置又は無線通信装置等が用いられる。また、運転者ID取得装置38として指紋認証装置を備え、予め記憶した運転者の指紋と、個々の運転者の指紋との指紋認証を行い、運転者IDを取得することもできる。また、個々の運転者が、入力装置で自身のID情報(暗証番号等の個人識別情報)を入力し、予め記憶されているID情報との照合によっても運転者IDを取得することができる。このように、運転者ID取得装置38は、IDキー又はIDカードの読み取り装置、指紋認証装置又はID情報入力装置等であり、ダンプトラック20の運転室内の運転席近傍に設けていてもよいし、運転者が運転室にアクセスする際に近づく車体21の任意の場所に設けてもよい。なお、鉱山の日々の生産計画にしたがって、各ダンプトラック20に搭乗する運転者の運転者IDが、管理装置10から無線通信でダンプトラック20に送信されることもある。この場合車載無線通信装置27が運転者ID取得装置38を兼ねることになる。運転者ID取得装置38が取得した運転者IDにより、どの運転者がダンプトラック20を運転しているかを特定することができる。
【0059】
傾斜センサ39は、ダンプトラック20の傾きを検出する。傾斜センサ39は、ダンプトラック20の前後方向の傾き及び幅方向の傾きを検出することができる。傾斜センサ39により、ダンプトラック20が走行している路面の勾配又は凹凸を検出することができる。
【0060】
車載記憶装置31は、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ若しくはハードディスクドライブ等又はこれらを組み合わせて構成されている。車載記憶装置31は、車載情報収集装置30が稼働情報を収集するための命令が記述されたコンピュータプログラム及び鉱山機械の管理システム1を運用するための各種設定値等を記憶している。車載情報収集装置30は、前記コンピュータプログラムを読み出し、所定のタイミングで状態取得装置から稼働情報を取得して、車載記憶装置31へ一時的に記憶させる。このとき、車載情報収集装置30は、同一項目の情報について平均値、最頻値又は標準偏差等を求める統計処理を施したりしてもよい。
【0061】
車載記憶装置31は、稼働情報として、位置情報、傾斜計情報、時間情報、排土情報、積込情報、燃費情報、操作履歴情報及びイベント情報等を記憶している。車載記憶装置31が記憶しているこれらの稼働情報は例示であり、稼働情報はこれらに限定されるものではない。位置情報、傾斜計情報、排土情報、燃費情報、操作履歴情報及びイベント情報等は、これらが発生した(車載情報収集装置30が取得した)時間に対応付けて車載記憶装置31に記憶されている。車載情報収集装置30は、図2に示す情報収集装置10からの要求を示す指令信号を無線通信として受信し、車載無線通信装置27を介して、車載記憶装置31に記憶された稼働情報を情報収集装置10へ送信する。
【0062】
本実施形態において、車載情報収集装置30は、稼働情報に含まれる、ダンプトラック20が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報と、予め設定された指定経路の位置情報とに基づき、ダンプトラック20が走行した経路を特定することもできる。指定経路は、排土場DPと積込場LPとの間に予め設定され、管理側記憶装置13に登録された経路である。鉱山の管理者や運用者等によって、指定経路は設計される。この他に、指定経路は、天候の変化又は障害物の発生等の突発的な事象によって一時的に変更され、管理側記憶装置13に登録された経路も含む。ダンプトラック20は、車載記憶装置31に記憶された、ダンプトラック20の経路を特定するための処理を記述したコンピュータプログラム(経路特定用コンピュータプログラム)を読み込み、実行することによって、ダンプトラック20の経路を特定することができる。この場合、車載記憶装置31は、経路の特定時に車載無線通信装置27を介して指定経路の情報を管理側記憶装置13から取得してもよいし、予め指定経路の情報が車載記憶装置31に記憶されていてもよい。次に、本実施形態に係る鉱山機械の管理方法において、ダンプトラック20の経路を特定する処理(経路特定処理)の一例を説明する。
【0063】
<経路特定処理>
図5は、経路の模式図である。図6は、本実施形態に係る経路特定処理の手順を示すフローチャートである。図7から図9は、経路特定処理においてデータ数を圧縮する手順を示す図である。次の説明においては、管理装置10が無線通信によってダンプトラック20から取得した稼働情報を用いて、稼働情報が取得されたダンプトラック20が走行した経路を特定する例を説明する。
【0064】
本実施形態に係る経路特定処理は、ダンプトラック20の運搬作業の1サイクルにおいてダンプトラック20が走行する経路を特定する。運搬作業の1サイクルとは、ダンプトラック20が排土場(第1排土場)DP1で排土した後に空荷の状態で積込場LPに移動し、積込場LPで積荷が積み込まれた後、排土場(第2排土場)DP2に移動し、ここで積荷を排土するまでをいう。第1排土場DP1と第2排土場DP2とは異なる場所である場合もあるし、同じ場所である場合もある。
【0065】
本実施形態に係る経路特定処理を実行するにあたり、ステップS101において、図2に示す管理装置10が有する管理側処理装置12の走行経路特定部12aは、ダンプトラック20から取得した稼働情報からダンプトラック20の位置情報を取得する。位置情報は、上述のように位置情報検出装置29により取得されている。位置情報は、運搬作業の1サイクルにおいてダンプトラック20が移動した経路における複数の位置の座標が、それぞれの位置にダンプトラック20が存在した時間に対応付けられている。ステップS101においては、走行経路特定部12aは、位置情報と、これに対応付けられた時間との両方を取得する。
【0066】
次に、ステップS102において、走行経路特定部12aは、車載情報収集装置30が収集した複数の位置情報のデータ数を圧縮する。上述したように、位置情報は、緯度、経度及び高度の座標であり、緯度の座標をX、経度の座標をY、高度の座標をZとすると、位置Pの位置情報は、P(X、Y、Z)で表すことができる。ダンプトラック20が稼働をしているとき、車載情報収集装置30は、詳細に位置情報を収集しているため、元データの状態には多くの位置情報が含まれている。すなわち車載情報収集装置30は、何ら処理していない状態において、運搬作業の1サイクルに対する多くの位置情報を収集している。緯度をX軸、経度をY軸として例えば、運搬作業の1サイクルの位置情報を示すと、隣接する位置情報の間隔が小さくなる結果、図7に示すように、線状に表される。
【0067】
しかし、本実施形態に係る経路特定処理においては、元データほど詳細な位置情報(データ数)は不要である。また、本実施形態においては、排土場DPと積込場LPと両者の間における2箇所の位置情報に基づいて経路を特定するため、これらの位置がある程度の範囲で特定できればよいことから、詳細な位置情報は必要ない。さらに、詳細な位置情報に基づくと、経路を特定する際にはその分厳密な一致が必要になるため、特定が難しくなる。このため、位置情報が有する緯度及び経度の座標の数値を丸めることにより、運搬作業の1サイクルに含まれる複数の位置情報のうち、隣接する位置情報同士の間隔ΔRが大きくなる。その結果、経路の特定が容易になる。
【0068】
位置情報検出装置29により測位された、緯度及び経度の座標の数値の小数点以下が5桁である場合、隣接する位置情報同士の間隔ΔRが1m程度(図7参照)であるとする。この場合、緯度及び経度の座標の数値を小数点以4桁で丸めれば、図8に示すように、隣接する位置情報同士の間隔ΔRが10m程度になり、緯度及び経度の座標の数値を小数点以3桁で丸めれば、図9に示すように隣接する位置情報同士の間隔ΔRが100m程度になる。経路の特定には、隣接する位置情報同士の間隔ΔRが100m程度であれば十分である。本実施形態において、走行経路特定部12aは、運搬作業の1サイクルの経路に含まれる複数箇所の位置情報の数値を丸める。より具体的には、走行経路特定部12aは、運搬作業の1サイクルに含まれる位置情報の元データに対して、緯度及び経度の座標の数値を元データよりも小数点以下が小さい桁で丸める。このようにすることで、本実施形態に係る経路特定処理に適した精度の位置情報を得ることができる。上述した丸め処理により、経路の特定に用いる位置情報は、元データよりもデータ数が少なくなる(圧縮される)。
【0069】
ステップS102において、元データの位置情報が圧縮されたらステップS103に進み、走行経路特定部12aは、経路の特定において、例えば、管理側記憶装置13に記憶され、登録されている既存の経路と比較する対象の位置(比較対象位置)を特定する。次に、複数の位置情報のデータ数を圧縮する手法の変形例を説明する。
【0070】
<データ圧縮の変形例>
図10は、位置情報と走行距離等との関係を示す図表である。図11は、比較対象位置を特定する処理の手順を示すフローチャートである。図12は、比較対象位置を特定する処理を示す模式図である。車載情報収集装置30は、所定の時間間隔(サンプリングタイム)毎に、図4に示す位置情報検出装置29からダンプトラック20の位置を取得し、車載記憶装置31に位置情報として記憶させる。図10の時間は、車載情報収集装置30が位置情報を収集した時刻を示し、時間間隔は等しい。すなわち、時間間隔をΔtとすると、t2=t1+Δt、t3=t2+Δt、ti+1=ti+Δt(iは1以上n以下の整数)となる。
【0071】
本変形例において、車載情報収集装置30によって所定の時間間隔Δt毎に収集された運搬作業の1サイクルにおける複数の位置情報のデータ数を圧縮するにあたり、ステップS1021において、所定の位置を基準位置とする。例えば、図10に示す時間t1における位置を基準位置とする場合、位置P1(X1、Y1、Z1)が基準位置となり、時間tiにおける位置を基準位置とする場合、位置Pi(Xi、Yi、Zi)が基準位置となる。この例では、位置P1(X1、Y1、Z1)を基準位置とする。
【0072】
次に、ステップS1022において、走行経路特定部12aは、基準位置から次の位置P2(X2、Y2、Z2)までの距離L1を算出し、積算する。この場合、時間t1の間は、車速V1でダンプトラック20が走行しているので、次の位置P2(X2、Y2、Z2)までの距離L1は、時間t1における車速V1と時間間隔Δtとの積Δt×V1である。このときの積算走行距離は、Ls=L1である。
【0073】
次に、ステップS1023に進み、積算走行距離Lsが予め定めた所定の規定距離Lsc以上になっている場合は(ステップS1023、Yes)、ステップS1024に進む。本変形例に係る処理により、隣接する位置情報同士の間隔は、規定距離Lscと同程度になる。規定距離Lscの大きさによってデータ数の圧縮の程度が決定されるので、規定距離Lscは、本実施形態に係る経路特定処理に適した精度の位置情報を得ることができる程度に設定される。本変形例では、規定距離Lscは、100m程度である。
【0074】
積算走行距離Lsが規定距離Lscに満たない場合(ステップS1023、No)、ステップS1022に戻り、走行経路特定部12aは、前回の位置P2(X2、Y2、Z2)からその次の位置P3(X3、Y3、Z3)までの距離L2を算出し、積算する。積算走行距離Lsは、L1+L2になる。距離L2は車速V2と時間間隔Δtとの積Δt×V2である。
【0075】
積算走行距離LsがL1+L2+L3のときに規定距離Lsc以上になったとする。この場合、ステップS1024において、走行経路特定部12aは、基準位置から条件が成立(Ls≧Lsc)したときの位置(この例ではP3)までに含まれるそれぞれの位置の座標を平均する。この場合は、位置P1(X1、Y1、Z1)、位置P2(X2、Y2、Z2)、位置P3(X3、Y3、Z3)が含まれるので、これらのそれぞれの座標を平均する。それぞれの座標の平均値を有する位置Pm(Xm、Ym、Zm)が、規定距離Lsc内の平均位置になる(図12参照)。
【0076】
次に、ステップS1025に進み、現在の位置が、運搬作業の1サイクルにおけるダンプトラック20の最後の位置PEである場合(ステップS1025、Yes)、本変形例に係るデータ圧縮が終了する。現在の位置が、運搬作業の1サイクルにおけるダンプトラック20の最後の位置ではない場合(ステップS1025、No)、ステップS1026に進む。ステップS1026において、走行経路特定部12aは、条件が成立(Ls≧Lsc)したときにおける位置(この例では位置P3)の次の位置(この例では位置P4)を、基準位置とする。そして、ステップS1022に戻って以降の手順を繰り返す。
【0077】
本変形例は、運搬作業の1サイクルにおける移動距離を規定距離Lsc毎に分割し、規定距離Lscに含まれる複数の位置の座標を平均した位置で前記複数の位置を代表させる。このような手法によっても、複数の位置情報のデータ数を圧縮することができる。複数の位置情報のデータ数を圧縮する手法は上述した2つに限定されるものではなく、他の手法を用いてもよい。次に、ダンプトラック20が走行する経路のパターンを説明する。
【0078】
図13は、ダンプトラック20が走行する経路のパターンを示す模式図である。以下においては、排土場から積込場に向かうときを往路、積込場から排土場に向かうときを復路という。この例において、排土場DPa、DPbはそれぞれが異なり、積込場LPa、LPbはそれぞれが異なる。第1のパターンとして、ダンプトラック20が、排土場DPaと積込場LPaとの間で往路も復路も同一の経路Rsを走行して往復する場合がある。第2のパターンとして、ダンプトラック20が、排土場DPaと積込場LPaとの間で往復するが、往路と復路とが異なる場合がある。この場合、往路は経路Ra、復路は経路Rsとなる。
【0079】
第3のパターンとして、積込場LPaは第1のパターンと同じであるが、第1のパターンが排土場DPaに排土するのに対し、排土場DPbに排土する場合がある。この場合、ダンプトラック20は、同一の経路Rbを往復する。第4のパターンとして、排土場DPaは第1のパターンと同じであるが、第1のパターンが積込場LPaで積載するのに対し、積込場LPbで積載する場合がある。この場合ダンプトラック20は、同一の経路Rcを往復する。
【0080】
さらに、第5のパターンとして、積込場LPaが同じであるが、ダンプトラック20は、異なる排土場Dpa、Dpbと積込場LPaとの間を移動する場合がある。この場合、往路は経路Rs、復路は経路Rbとなる。また、第6のパターンとして、排土場DPaが同じであるが、ダンプトラック20は、異なる積込場Lpa、Lpbと排土場DPaとの間を移動する場合がある。この場合、ダンプトラック20は、経路Rs、Rcをそれぞれ往復する。第5のパターン及び第6のパターンは、経路の切り替え時等に発生するが、希にしか発生しないので、通常は経路の特定から除外してもよい。
【0081】
第1のパターンは、複数の運搬作業の1サイクルを比較した場合、排土場DPaの位置情報と、積込場LPaの位置情報と、排土場DPaと積込場LPaとの中間位置MP1、MP2の位置情報とが一致、すなわちこれらの緯度、経度及び高度のデータが一致する場合に、同じ経路であると特定される。中間位置MP1、MP2は、排土場DPaと積込場LPaとの間にあればよく、必ずしも両者からの距離が同一の位置を意味するものではない(以下同様)。第2のパターンは、複数の運搬作業の1サイクルを比較した場合、排土場DPaの位置情報と、積込場LPaの位置情報と、経路Rsの中間位置MP1(又はMP2)の位置情報と、経路Raの中間位置MPa1の位置情報とが一致、すなわちこれらの緯度、経度及び高度のデータが一致する場合に、同じ経路であると特定される。
【0082】
第3のパターンは、複数の運搬作業の1サイクルを比較した場合、排土場DPbの位置情報と、積込場LPaの位置情報と、両者の中間位置MPb1、MPb2の位置情報とが一致、すなわちこれらの緯度、経度及び高度のデータが一致する場合に、同じ経路であると特定される。第4のパターンは、複数の運搬作業の1サイクルを比較した場合、排土場DPaの位置情報と、積込場LPbの位置情報と、両者の中間位置MPc1、MPc2の位置情報とが一致、すなわちこれらの緯度、経度及び高度のデータが一致する場合に、同じ経路であると特定される。
【0083】
第5のパターンは、複数の運搬作業の1サイクル同士を比較した場合、排土場DPaの位置情報と、積込場LPaの位置情報と、排土場DPbの位置情報と、経路Rsの中間位置MP1(又はMP2)の位置情報と、経路Rbの中間位置MPb2(又はMPb1)の位置情報とが一致、すなわちこれらの緯度、経度及び高度のデータが一致する場合に、同じ経路であると特定される。第6のパターンは、複数の運搬作業の1サイクルを比較した場合、排土場DPaの位置情報と、積込場LPaの位置情報と、積込場LPbの位置情報と、経路Rsの中間位置MP1(又はMP2)の位置情報と、経路Rcの中間位置MPc1(又はMPc2)の位置情報とが一致、すなわちこれらの緯度、経度及び高度が一致する場合に、同じ経路であると特定される。
【0084】
第1のパターンから第4のパターン、すなわち、排土場と積込場とがそれぞれ一箇所ずつである場合には、ダンプトラック20が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる4箇所の位置情報に基づき、ダンプトラック20が走行した経路が特定される。第5のパターン及び第6のパターンは、すなわち、排土場と積込場とのいずれかが2箇所である場合には、ダンプトラック20が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる5箇所の位置情報に基づき、ダンプトラック20が走行した経路が特定される。
【0085】
ステップS102でデータの圧縮が終了したら、ステップS103に進み、走行経路特定部12aは、比較対象位置を抽出する。比較対象位置とは、排土場及び積込場を含み、かつダンプトラックが排土場から積込場に移動し、再び排土場に移動するまでの経路に含まれる少なくとも4箇所の位置である。上述した第1のパターンである場合、走行経路特定部12aは、排土場DPaの位置と、積込場LPaの位置と、両者の中間位置MP1、MP2の位置とを、比較対象位置として、ステップS102で求めた、経路の特定に用いる位置情報から取得する。そして、走行経路特定部12aは、ステップS102において、経路を特定しようとする対象を定めるのである。また、走行経路特定部12aは、管理側記憶装置13の経路リスト14Rに登録されている既存の経路を読み出し、それぞれの比較対象位置を抽出する。
【0086】
経路を特定しようとする対象及び比較する既存の経路が、上述した第1〜第6のパターンのうち、どのパターンに該当するかは、排土場及び積込場の数並びに両者の中間の位置に基づいて走行経路特定部12aが特定する。登録されている既存の経路については、予め第1〜第6のパターンを識別できるIDを付して管理側記憶装置13に登録してもよい。
【0087】
経路を特定しようとする対象及び比較する既存の経路について、それぞれ比較対象位置が抽出されたら、走行経路特定部12aは、両者の比較対象位置を比較する。その結果、積込場が一致し(ステップS104、Yes)、排土場が一致し(ステップS105、Yes)、両者の途中の位置(本実施形態では両者の中間位置)が往路と復路とで一致する(ステップS106、Yes)場合、走行経路特定部12aは、経路を特定しようとする対象が、比較する既存の経路と同じ経路であるとする(ステップS107)。
【0088】
積込場と排土場との途中の位置(上述した、2箇所の位置情報又は中間位置と説明した位置)は、例えば、車載情報収集装置30が収集した複数の位置情報のデータ数を圧縮した後におけるデータ数のメジアン値に相当する位置とすることができる。例えば、圧縮後における積込場と排土場との間に存在するデータ数(位置情報の数)が11個であった場合、積込場及び排土場からそれぞれ6番目のデータに対応する位置が、前記「途中の位置」となる。この他にも、積込場又は排土場から数えて所定数のデータ(位置情報の数)に対応する位置を、前記「途中の位置」としてもよい。
【0089】
積込場の不一致、排土場の不一致、両者の途中の位置が往路又は復路のいずれかで不一致である場合(ステップS104、ステップS105、ステップS106のいずれかでNo)、走行経路特定部12aは、経路を特定しようとする対象が、比較する既存の経路と同じ経路とは異なる経路であるとする(ステップS108)。このようにして、管理装置10は、ダンプトラック20による運搬作業の1サイクルにおいてダンプトラック20が走行した未知の経路を区別して特定する。本実施形態によれば、ダンプトラック20の運搬作業の1サイクルにおける経路を特定できるので、生産性向上のための走路設計評価又は運転者の運転指導等において、ダンプトラック20が走行した経路毎の解析が可能になるとともに、その解析結果も妥当なものとなる。次に、経路特定処理の後処理を説明する。
【0090】
<経路特定処理の後処理>
図14は、経路特定処理の後処理の手順を示すフローチャートである。ステップS201において、管理装置10の走行経路特定部12aは上述した経路の特定処理を実行する。次に、ステップS202において、登録されている既存の経路の中から経路が特定できないと判断される場合は、その経路はまだ経路リスト14Rに登録されていない、すなわち未登録である(ステップS202、Yes)。この場合、ステップS203に進み、図2に示す管理側処理装置12の勾配解析部12bは、経路解析を実行する。経路解析は、経路の勾配毎に複数のセクションに分割して、勾配の情報を経路の情報に付与する処理である。経路解析については後述する。経路解析が終了したら、ステップS204に進み、勾配解析部12bは、その結果を経路情報として経路リスト14Rに登録(保存)する。ステップS202において、登録されている既存の経路の中から経路が特定できたと判断される場合、その経路は既に経路リスト14Rに登録済なので、ステップS203及びステップS204は実行せず、後処理を終了する。次に、経路解析について説明する。
【0091】
<経路解析>
図15、図16は、経路解析の手順を示すフローチャートである。図17から図19は、経路解析の説明図である。特定された経路を、勾配に応じて区分けしておくことは、ダンプトラック20から収集した稼働情報を解析する際に重要な情報になる。例えば、特定された経路の登りの区間における平均車速を求めることがある。経路解析は、一定距離の区間の平均傾斜角を求めてテンポラリセクションとし、このテンポラリセクションを元に、特定された経路を勾配に応じて複数のセクションに区分けするものである。
【0092】
経路解析を実行するにあたり、まず、一定距離の区間の平均傾斜角からテンポラリセクションを求める。勾配解析部12bは、管理側記憶装置13の経路リスト14Rから経路解析を実行する経路の情報(経路情報)を読み出す。この経路情報は、車載情報収集装置30が収集し、圧縮がされていない元データである。ステップS301において、勾配解析部12bは、読み出した経路情報のうち、所定の位置を基準点とする。本実施形態では、図17に示す位置Pbを基準位置としている。なお、経路解析の開始時においては、最初の位置SPを所定の位置とすることが好ましい。
【0093】
ステップS302に進み、所定の位置が最後の位置EPでないと判断される場合(ステップS302、No)、ステップS303に進む。ステップS303において、所定の位置が分岐・交差点位置でないと判断される場合(ステップS303、No)、ステップS304に進む。ステップS304において、勾配解析部12bは、次の位置を一定距離の区間を特定するための対象とする。この例では、図17に示す位置PN1が前記「次の位置」となる。ステップS305に進み、次の位置PN1が基準位置Pbから規定距離ΔL(例えば、20m〜100m程度)以上離れていないと判断される場合(ステップS305、No)、勾配解析部12bは、ステップS302に戻り、以降の手順を実行する。
【0094】
勾配解析部12bがステップS302からステップS305を繰り返した結果、位置PN4で、基準位置Pbから規定距離ΔL以上離れたとする(ステップS305、Yes)。この場合、ステップS306に進み、基準位置Pbから現在の位置PN4までの傾斜角を平均する。傾斜角の情報は、車載情報収集装置30が位置情報を取得するタイミングで傾斜センサ39から取得している。この傾斜角の情報は、管理側記憶装置13が記憶している経路リスト14Rの経路の位置情報に対応付けて記述されている。このため、勾配解析部12bは、管理側記憶装置13の経路リスト14Rから経路解析の対象となっている経路の情報から、傾斜角の情報を取得することができる。
【0095】
次に、ステップS307に進み、勾配解析部12bは、規定距離ΔLの区間に、ステップS306で求めた傾斜角の平均値を付加する。そして、勾配解析部12bは、基準位置Pb及び位置PN1、PN2、PN3、PN4を含む規定距離ΔLの区間を1つのテンポラリセクションとする。その後、ステップS308に進み、勾配解析部12bは、テンポラリセクションの次の位置を基準位置とした後ステップS302に戻り、一定距離の区間を特定するための対象の位置が最後の位置EPになるまでステップS302からステップS308を繰り返す。
【0096】
次に、ステップS303に戻って説明する。ステップS303において、所定の位置が分岐・交差点位置であると判断される場合(ステップS303、Yes)、ステップS306に進み、勾配解析部12bは、基準位置Pbから分岐・交差点位置までの傾斜角を平均する。その後、ステップS307に進み、勾配解析部12bは、基準位置Pbから分岐・交差点位置までの区間に、ステップS306で求めた傾斜角の平均値を付加する。そして、勾配解析部12bは、基準位置Pbから分岐・交差点位置までの位置情報を含む区間を1つのテンポラリセクションとする。その後、ステップS308に進み、勾配解析部12bは、テンポラリセクションの次の位置を基準位置とした後、一定距離の区間を特定するための対象の位置が最後の位置EPになるまでステップS302からステップS308を繰り返す。
【0097】
交差点及び分岐点の位置情報は、予め他の手段(ハンディGPS装置、測量又は走路設計図からの読み取り)から得られた位置情報を管理装置10に入力することで用意されている。あるいは、経路リスト14Rに記述されている情報から勾配解析部12bが交差点及び分岐点の位置情報を自動で検出する。交差点又は分岐点は、勾配解析部12bが、鉱山のすべての経路を重ね合わせたときにおける線の交わりを検出することで自動的に検出することができる。線の交わりは、勾配解析部12bが複数の経路を比較することによって重なる部分(近傍点)をサーチし、端点を探せば、そこが分岐点又は交差点になるので、これらを自動的に検出することができる。
【0098】
次に、ステップS302に戻って説明する。所定の位置が図17に示す最後の位置EPである場合には(ステップS302、Yes)、ステップS309に進み、勾配解析部12bは、基準位置から現在の最後の位置EPまでの傾斜角を平均する。次に、ステップS310に進み、勾配解析部12bは、規定距離ΔLの区間に、ステップS309で求めた傾斜角の平均値を付加する。そして、勾配解析部12bは、基準位置から最後の位置EPまでの位置情報を含む区間を1つのテンポラリセクションとする。上述した処理により、特定された経路は、図18に示すように、St1〜St6で示す6個のテンポラリセクションに区分される。
【0099】
次に、テンポラリセクションSt1〜St6を元に、特定された経路を複数のセクションに区分する。ステップS401において、勾配解析部12bは、所定のテンポラリセクションを基準とする。処理の開始においては、最初のテンポラリセクションSt1を基準とする。次に、ステップS402において、基準が、特定された経路における最後のテンポラリセクションでない場合(ステップS402、No)、ステップS403に進む。
【0100】
ステップS403において、現在のテンポラリセクションが基準と同じ傾斜角のレベルであれば(ステップS403、Yes)、ステップS404に進む。テンポラリセクションSt1を基準とした場合、ステップS403においては、基準がテンポラリセクションSt1なので、傾斜角は同じ大きさとなる。ステップS404において、勾配解析部12bは、次のテンポラリセクションを新たなテンポラリセクションとする。ステップS404が最初に実行される場合、テンポラリセクションSt2が次のテンポラリセクションとなる。その後、ステップS402に戻って、勾配解析部12bは、以降の手順を実行する。その結果、ステップS403が2回目以降である場合、ステップS403においては、基準以外のテンポラリセクションが比較されることになる。例えば、ステップS403が2回目であれば、図18に示すテンポラリセクションSt2と基準(ステップS401で基準としたテンポラリセクションSt1)とが比較される。
【0101】
ステップS403において、現在のテンポラリセクションが基準と同じ傾斜角のレベルでない場合(ステップS403、No)、ステップS405に進む。ステップS405において、勾配解析部12bは、基準から現在の1つ前のテンポラリセクションまでを1つのセクションとする。例えば、図18に示す例では、テンポラリセクションSt2がテンポラリセクション(基準)St1と異なる傾斜角レベルであったため(ステップS403、No)、テンポラリセクションSt1が1つのセクションS1となっている。
【0102】
次に、ステップS406に進み、勾配解析部12bは、現在のテンポラリセクションを基準とした後、ステップS402に戻って以降の手順を実行する。図18に示す例では、現在のテンポラリセクションがテンポラリセクションSt2なので、ステップS406においては、テンポラリセクションSt2が基準となり、ステップS402以降の手順が実行される。次に、ステップS402に戻って説明する。
【0103】
ステップS402において、基準が、特定された経路における最後のテンポラリセクションである場合(ステップS402、Yes)、ステップS407に進む。図18に示す例では、テンポラリセクションSt6が最後のテンポラリセクションとなる。ステップS407において、勾配解析部12bは、基準から最後のテンポラリセクションまでを1つのセクションとして、経路解析が終了する。経路解析により、特定された経路は、同程度の勾配の複数のセクションに区分される。図18、図19に示す例では、排土場DP1から積込場LPを経由して排土場DP2に至る経路が、4個のセクションS1からS4に区分されている。この例において、セクションS1の傾斜角SLは0.5°(ほぼ平地)、セクションS2の傾斜角SLは5°(上り)、セクションS3の傾斜角SLは−4°(下り)、セクションS4の傾斜角SLは−0.1°(ほぼ平地)である。
【0104】
勾配解析部12bは、経路解析の結果、すなわち、セクション毎の勾配(傾斜角)を、特定された経路の位置情報と対応付けて経路リスト14Rに記述して、管理側記憶装置13に記憶させる。また、勾配解析部12bは、経路解析の結果をセクション毎に色分けをして、図2に示す表示装置16に表示したり、出力装置19から出力したりしてもよい。このように、特定された経路の勾配を細かく区分するのではなく、ある程度の範囲で区分することにより、表示装置16に表示したり出力装置19から出力した場合、経路の勾配状態を理解しやすくなる。次に、経路を特定する処理(経路特定処理)の変形例を説明する。
【0105】
(経路特定処理の第1変形例)
上述した例では、車載情報収集装置30が収集したダンプトラック20の運搬作業の1サイクルにおける稼働情報(主として位置情報)を用いて、管理装置10が運搬作業の1サイクルにおける経路を特定した。第1変形例においては、図4に示す車載情報収集装置30が運搬作業の1サイクルにおける経路を特定する。この場合、車載情報収集装置30は、車載無線通信装置27を介して、図2に示す管理装置10の管理側記憶装置13の経路リスト14Rから登録済の経路を取得する。そして、車載情報収集装置30は、取得した登録済の経路及び運搬作業の1サイクルにおける稼働情報を用いて、上述した経路を特定する処理(経路特定処理)を実行することにより、運搬作業の1サイクルにおける経路を特定する。このように、管理装置10のみならず、車載情報収集装置30もダンプトラック20が運搬作業の1サイクルにおいて走行した経路を特定することができる。
【0106】
(経路特定処理の第2変形例)
図20は、経路特定処理の第2変形例を説明するための図である。図21は、領域IDと位置情報等との関係を示す図表である。本変形例は、ダンプトラック20が走行する経路Rg、Rrに、経路の所定領域を識別するための識別体50a〜50gを設け、これをダンプトラック20が有する読み取り装置51で読み取ることにより、経路を特定するものである。
【0107】
経路Rg、Rrは、複数のセクションSa〜Sgに区分されている。それぞれのセクションSa〜Sgには、これらを識別するための指標としての領域IDの情報を少なくとも有する識別体50a〜50gが設置されている。識別体50a〜50gは、ダンプトラック20の車輪23により踏まれたりすることのない、経路の路側に設置されるのが好ましい。識別体50a〜50gは、例えば、RFID(無線ICタグ)である。ダンプトラック20は、経路Rg、Rrを走行しながら読み取り装置51で識別体50a〜50gの領域IDを読み取る。そして、車載情報収集装置30は、読み取った領域IDを、例えば、図21に示すように、読み取った時点における時間、位置情報、車速及び燃費等といった稼働情報に対応付けて車載記憶装置31に記憶する。領域IDは、鉱山における複数の経路に対応付けて付与してあるので、領域IDによってダンプトラック20が運搬作業の1サイクルにおいて走行した経路を特定することができる。
【0108】
識別体50a〜50gは、RFIDに限定されるものではない。例えば、反射板を経路Rg、RrのそれぞれのセクションSaからSgに設置する。そして、ダンプトラック20に読み取り装置51として反射式レーダ(物体検知手段)を搭載し、前記反射板を検知しながら走行することでダンプトラック20が走行している経路を特定してもよい。
【0109】
また、ダンプトラック20の運転者が、ダンプトラック20が運搬作業の1サイクルにおいて走行する経路を車載情報収集装置30に入力してもよい。この場合、運転者は、例えば、ダンプトラック20が走行する経路が変わる毎に、ダンプトラック20の運転室内に設けられた入力装置等で経路を選択(指示)する。その選択(指示)の情報は、車載情報収集装置30が、入力された時点における時間、位置情報、車速及び燃費等といった稼働情報に対応付けられて車載記憶装置31に記憶する。さらに、車載情報収集装置30は、燃費データ、積載量データ等を選択(指示)された経路にひも付けて付加する。このようにしても、ダンプトラック20が運搬作業の1サイクルにおいて走行した経路を特定することができる。次に、本実施形態に係る鉱山機械の管理方法において、特定された経路を利用して稼働情報を解析する例を説明する。
【0110】
<特定された経路を利用した稼働情報の解析例1>
図22は、稼働情報を解析して路面整備提案を作成する例を示すフローチャートである。図23は、稼働情報の解析の説明に用いる図である。この例は、上述のような経路特定処理によって特定された経路のうち、同じ経路を走行したダンプトラック20の稼働情報から、ダンプトラック20が走行する経路の路面の状態を解析し、必要に応じて路面を整備する提案を作成するものである。鉱山の管理者又は運用者は、路面整備の提案を受けて鉱山の経路等の路面の整備の手配及び実行を行うことができる。鉱山は、ダンプトラック20の走行又は降雨等によって路面が荒れて凹凸が発生する。路面の凹凸がひどくなると、ダンプトラック20の運転者にとっては疲労の原因になる。また、ダンプトラック20にとっても凹凸を走行する際に発生する衝撃等が車体等への負荷となり、損傷の原因となる。さらに、路面凹凸がある場所では、車輪23のタイヤのスリップを引き起こし、タイヤの早期摩耗を引き起こす要因にもなる。また、路面凹凸のある場所で、スリップ発生又は減速走行を強いられたりするから、燃費の悪化にもつながる。したがって、路面凹凸が発生したならば、速やかに検知し整備することで、鉱山の生産性の維持向上を図ることができる。例えば、ダンプトラック20の1台あたりにおける路面凹凸イベント(路面の凹凸に関する路面情報に相当する)の発生頻度Q(回/1サイクル)を所定の期間(例えば1日)毎に集計し、特定の閾値Qt以上に増加した場合には、路面の整備に関する指標として、路面の整備を提案する路面整備提案が作成される。
【0111】
路面の状態を解析するにあたり、ステップS501において、図2に示す管理装置10が有する管理側処理装置12の路面状態解析部12cは、判別した経路を走行したダンプトラック20の稼働情報を抽出する。次に、ステップS502において、路面状態解析部12cは、特定の経路、すなわち同一の経路を走行した複数のダンプトラック20の稼働情報から、路面凹凸イベントの発生頻度Qのデータを抽出する。路面凹凸イベントは、所定値よりも大きい凹凸をダンプトラック20が検知したときにカウントされる。凹凸は、例えば、加速度センサを搭載し、加速度センサが検知した過度な加速度変化を示す信号、サスペンションシリンダー24のストロークの過度な変動等から検知される。また、圧力センサ26の検出信号の過度な変動から路面の凹凸を検知してもよい。さらに、レーダー等の光学式物体検出装置を搭載して路面にレーザを照射し、路面の凹凸を検出しながら走行し、レーザの反射光の変化によって凹凸を検出してもよい。発生頻度Qは、ダンプトラック20の搬送作業の1サイクルあたりに凹凸イベントが発生した回数である。路面凹凸イベントの情報は、その路面凹凸イベントの発生時の位置情報検出装置29により測位された位置情報と関連付けて車載記憶装置31に記憶される。
【0112】
ステップS503において、少なくとも2台以上のダンプトラック20のQ値が所定の閾値Qt未満であると判断される場合(ステップS503、No)、路面状態解析部12cは、ステップS501に戻り、以降の手順を実行する。少なくとも2台以上のダンプトラック20のQ値が所定の閾値Qt以上であると判断される場合(ステップS503、Yes)、ステップS504に進む。ステップS504において、各ダンプトラック20の路面凹凸イベントの発生場所(位置情報)が、図23に示す所定範囲LA(50m〜100m程度)内にないと判断される場合(ステップS504、No)、路面状態解析部12cは、ステップS501に戻り、以降の手順を実行する。各ダンプトラック20の路面凹凸イベントの発生場所が、所定範囲LA内にあると判断される場合(ステップS504、Yes)、ステップS505に進む。
【0113】
図23に示すように、複数のダンプトラック20A、20Bが同じ経路を走行する限りは、各ダンプトラック20A、20Bは同じ場所で路面凹凸イベントを発する可能性が高い。しかし、走行速度又はサスペンションシリンダー24の動作によっては、検出される路面凹凸イベントが示す発生場所がそれぞれの各ダンプトラック20A、20Bでばらつくことが予想される。例えば、ダンプトラック20Aが路面凹凸イベントを検出した位置と、ダンプトラック20Bが路面凹凸イベントを検出した位置との相対位置が異なることがある。したがって、複数のダンプトラック20A、20B間において路面凹凸イベントが検出された箇所が所定範囲LA内にあれば、ステップS504により同じ箇所の路面凹凸イベント(同じ個所に整備すべき路面凹凸が存在する)とみなす。
【0114】
ステップS505において、路面状態解析部12cは、路面凹凸イベントの発生箇所の発生時間に基づき、路面凹凸イベントが発生した経路及びその位置を抽出する。そして、路面状態解析部12cは、凹凸イベントが発生した経路の路面の整備に関する指標として、路面整備提案を作成する。この例では、路面凹凸イベントを検出した複数のダンプトラック20A、20Bの前後における所定範囲RRA、RRB、RRCの路面の整備が必要であるとする。
【0115】
その後、ステップS506に進み、路面状態解析部12cは、作成した路面整備提案に基づき、路面の整備が必要な経路及び路面整備が必要な箇所をレポートにグラフィック及び文字で出力する。このように、本解析例は、同じ経路を走行したダンプトラック20同士を比較することにより、路面の整備が必要な箇所を抽出する精度を向上させることができるので、鉱山の管理者又は運用者に適切な路面整備の提案をすることができる。
【0116】
<特定された経路を利用した稼働情報の解析例2>
図24は、稼働情報を解析して燃費改善提案又は渋滞改善提案を作成する例を示すフローチャートである。この例は、特定された経路のうち、同じ経路を走行したダンプトラック20の稼働情報から、ダンプトラック20の燃料消費及び経路の渋滞を解析し、必要に応じて燃費を改善する提案又は渋滞発生箇所におけるダンプトラックの走行速度を改善する提案を作成するものである。鉱山の管理者、運用者又は運転者は、燃費を改善する提案又は渋滞発生箇所におけるダンプトラック20の走行速度を改善する提案を受けて鉱山の経路等の設計変更や運行規則の改善、運転者の運転指導等を行うことができる。渋滞の発生は、ダンプトラック20の燃費を悪化し、ブレーキの消耗やタイヤの摩耗を促進させるとともに衝突等の安全面でも避けるべきであり、鉱山の生産性を低下させる要因となる。この例において、燃費とは、所定の距離を走行するのに必要な燃料の量をいう。
【0117】
ダンプトラック20の燃料消費等を解析するにあたり、ステップS601において、図2に示す管理装置10が有する管理側処理装置12の燃費解析部12dは、判別した経路を走行したダンプトラック20の稼働情報を抽出する。次に、ステップS602において、燃費解析部12dは、特定の経路、すなわち同一の経路を走行した複数のダンプトラック20の稼働情報から、走行中の燃料消費に関する燃費情報を抽出する。燃費情報は、少なくとも瞬間燃費を有している。燃費解析部12dは、瞬間燃費に基づいて、所定期間中の平均燃費を求めることができるので、走行中における平均燃費Faveを求めることができる。
【0118】
次に、ステップS603において、停車中を除く各ダンプトラック20の走行時における平均燃費Faveが所定の閾値Ft以上であると判断される場合(ステップS603、Yes)、ステップS604に進む。ステップS604において、燃費解析部12dは、平均燃費Faveが所定の閾値以上とされたダンプトラック20を運転した運転者IDを抽出する。運転者IDは、図4に示す運転者ID取得装置38から抽出することができる。
【0119】
次に、ステップS605において、燃費解析部12dは、平均燃費Faveが所定の閾値以上とされたダンプトラック20又は運転者に対応した、燃料消費に関する指標としての燃費改善提案を作成する。そして、ステップS606において、作成した燃費改善提案に基づき、ダンプトラック20の番号又は運転者IDをレポートにグラフィック及び文字で出力する。このように、本解析例は、同じ経路を走行したダンプトラック20同士を比較することにより、燃費の改善が必要なダンプトラック20又は運転者を抽出する精度を向上させることができるので、鉱山の管理者、運用者又は当該運転者に適切な燃費改善の提案を行うことができる。
【0120】
次に、ステップS603に戻って説明する。停車中を除く各ダンプトラック20の走行時における平均燃費Faveが所定の閾値Ft未満である場合(ステップS603、No)、ステップS607に進む。ステップS607において、図2に示す管理装置10が有する管理側処理装置12の渋滞解析部12eは、各ダンプトラック20の運搬作業の1サイクルあたりにおける停車時間比率Srを求める。停車時間比率Srは、1サイクルあたりにおけるダンプトラック20の停車時間の合計を、1サイクルあたりにおける走行時間の合計で除したものである。
【0121】
ステップS608に進み、運搬作業の1サイクルあたりにおける停車時間比率Srが所定の閾値Stを超え、かつ増加傾向にあったダンプトラック20が2台未満であると判断される場合(ステップS608、No)、稼働情報の解析は終了する。運搬作業の1サイクルあたりにおける停車時間比率Srが所定の閾値Stを超え、かつ増加傾向にあったダンプトラック20が、少なくとも2台以上あると判断される場合(ステップS608、Yes)、ステップS609に進む。ステップS609において、渋滞解析部12eは、1サイクルあたりにおける停車時間比率Srが、所定の閾値Stを超え、かつ増加傾向にあったダンプトラック20の長時間停車(所定時間以上の停車)イベントとその停車位置データ(位置情報)を抽出する。長時間停車イベントとは、回転センサ25等の車速を検出するセンサ等が、停車を示す信号を出力した後、タイマーIC等によって経過時間を計時し、所定時間以上の停車が継続したと判断したならば生成される、長時間停車イベントを示す情報である。
【0122】
次に、ステップS610において、図23に示す各ダンプトラック20A、20Bの長時間停止イベントが発生した停車位置が、所定範囲LB(30m〜50m程度)の範囲内にない場合(ステップS610、No)、稼働情報の解析は終了する。各ダンプトラック20A、20Bの長時間停止イベントが発生した停車位置が、所定範囲LB(30m〜50m程度)の範囲内にある場合(ステップS610、Yes)、ステップS611に進む。ステップS611において、渋滞解析部12eは、ダンプトラック20の停車位置を渋滞発生個所として、経路の位置情報と対応付けて渋滞発生改善提案を作成する。また、渋滞解析部12eは、ダンプトラック20の走行速度の改善に関する指標(走行速度改善提案)を作成する。
【0123】
例えば、図23に示す例において、ダンプトラック20Bは一日の中で最も先に長時間停止イベントを発したとする。この場合、渋滞解析部12eは、ダンプトラック20Bが長時間停止した位置の後方における所定範囲RRA、RRBの走行速度の制限をより低くすることを示す情報を、走行速度改善提案に織り込む。このようにすることで、ダンプトラック20の制動及び発進の回数を低減させて、渋滞の発生を抑制するとともに燃費の低減、ブレーキの消耗抑制、タイヤの摩耗抑制又は安全の確保等を図ることができ、鉱山の生産性の維持向上に努めることができる。
【0124】
次に、ステップS612において、渋滞解析部12eは、作成した渋滞発生改善提案に基づき、渋滞発生箇所及び走行速度改善提案を、レポートにグラフィック及び文字で出力する。このように、本解析例は、同じ経路を走行したダンプトラック20同士を比較することにより、渋滞の改善が必要な箇所の情報及びダンプトラック20の走行速度を改善する情報の精度を向上させることができるので、適切な渋滞発生改善の指標を提供することができる。その結果、渋滞の発生頻度を低下させることができるので、鉱山の生産性低下を最小限に抑えることができる。鉱山の管理者又は運用者は、走行速度の制限に係る運行規則を改善したり運転者に走行速度の制限に係る注意を促すことができる。
【0125】
<特定された経路を利用した稼働情報の解析例3>
図25は、稼働情報を解析して経路変更提案、運転者疲労確認提案又は点検提案を作成する例を示すフローチャートである。この例は、上述した解析例2において渋滞発生改善提案及び走行速度改善提案を作成した経路のうち、同じ経路を走行したダンプトラック20の稼働情報から、必要に応じて経路変更指標としての経路変更提案、疲労確認指標としての運転者疲労確認提案又はダンプトラック20の点検に関する指標としての点検提案を作成するものである。次に、稼働情報の解析例3の手順を説明する。
【0126】
ステップS701において、図2に示す管理装置10が有する管理側処理装置12の走行経路解析部12fは、渋滞発生改善提案及び走行速度改善提案を作成した経路を抽出する。これらが作成されると、対応する経路の情報には、これらが作成された履歴が付されるので、走行経路解析部12fは、前記履歴によって渋滞発生改善提案及び走行速度改善提案を作成した経路を抽出することができる。
【0127】
ステップS702進み、抽出した経路において、所定期間内に長時間停止イベントが発生したダンプトラック20が2台未満であると判断される場合(ステップS702、No)、稼働情報の解析は終了する。所定期間内に長時間停止イベントが発生したダンプトラック20が少なくとも2台以上であると判断される場合(ステップS702、Yes)、ステップS703に進む。ステップS703において、長時間停止イベントが発生した各ダンプトラック20に、エラーイベント(異常の発生)がないと判断される場合(ステップS703、No)、ステップS704に進む。エラーイベントは、ダンプトラック20の異常に関する異常情報に相当する。エラーイベントは、車載情報収集装置30がダンプトラック20の各所に取り付けられたセンサ類から送信される信号を取得して異常の有無を判別し、異常が発生していると判定した場合に生成される情報であったり、あるいはセンサ類自身が異常を検知した時に異常を示す信号を車載情報収集装置30が取得することで生成される情報である。ダンプトラック20の異常には、例えばエンジン34Gのエンジン水温の異常(過昇温状態)及びバッテリの異常(電圧や充電回路の異常)等がある。
【0128】
ステップS704において、長時間停止イベントが発生した各ダンプトラック20の停車位置は、所定範囲LB(図23参照)内であると判断される場合(ステップS704、Yes)、ステップS705に進む。ステップS705において、走行経路解析部12fは、ステップS701で抽出した経路に対して、経路変更指標としての経路設計変更提案を作成する。すなわち、渋滞の改善を図るための走行速度の改善提案を行い、かつ、ダンプトラック20に異常が発生していないにも関わらず長時間停止があったということは、ダンプトラック20が走行する経路の設計に改善の余地あると判断できるからである。
【0129】
次に、ステップS706に進み、走行経路解析部12fは、経路設計変更提案に基づき、経路を識別するための経路識別ID及び経路識別IDに対応する経路の図面をグラフィック及び文字で出力する。このように、本解析例は、以前に走行速度改善提案を作成した経路と同じ経路を走行したダンプトラック20同士について、所定時間以上の停止に関する長時間停止情報に基づき、経路の長さ、ルート並びに交差点及び分岐点の配置位置といった経路の設計について設計変更が必要な経路を抽出する。このため、本解析例は、設計変更が必要な経路を抽出する精度を向上させることができるので、適切な経路の設計変更に関する提案をすることができる。その結果、鉱山の管理者又は運用者は、設計変更が必要な経路を速やかに改善することができるので、鉱山の生産性低下を最小限に抑えることができる。
【0130】
次に、ステップS704に戻って説明する。長時間停止イベントが発生した各ダンプトラック20の停車位置は、所定範囲LB(図23参照)外であると判断される場合(ステップS704、No)、ステップS707に進む。ステップS707において、図2に示す管理装置10が有する管理側処理装置12の運転者状態解析部12gは、長時間停止イベントが発生した各ダンプトラック20を運転した運転者の運転者IDを抽出し、運転者の勤怠状態に関する疲労確認指標としての運転者疲労確認提案を作成する。ステップS704で否定(No)と判断されるケースは、ダンプトラック20に異常がなく、複数のダンプトラック20が異なる場所で長時間停止したと判断できる。このような場合、運転者が必要以上に休憩していたり、運転者に体調不良等が発生していたりするおそれが想定できるので、運転者の体調又は勤怠状態を確認(勤怠状態の管理)する余地ありと判断して、ステップS707において運転者状態解析部12gは、運転者疲労確認提案を作成する。
【0131】
次に、ステップS708に進み、運転者状態解析部12gは、作成した運転者疲労確認提案に基づき、ダンプトラック20の番号又は運転者IDをレポートにグラフィック及び文字で出力する。このように、本解析例は、同じ経路を走行したダンプトラック20同士について、所定時間以上の長時間停止が発生した位置に関する長時間停止位置情報に基づき、運転者疲労確認提案を作成する。その結果、健康状態を確認すべき運転者及び勤怠状態を確認すべき運転者を抽出する精度を向上させることができる。鉱山の管理者又は運用者は、運転者の勤怠状態の管理改善を行ったり、鉱山のオペレーションの改善を行ったりすることができ、鉱山の生産性の維持向上や安全の確保に努めることができる。
【0132】
次に、ステップS703に戻って説明する。長時間停止イベントが発生した各ダンプトラック20に、エラーイベント(異常の発生)がある場合(ステップS703、Yes)、ステップS709に進む。ステップS709において、図2に示す管理装置10が有する管理側処理装置12の異常解析部12hは、エラーイベントが発生したダンプトラック20について、点検提案を作成する。すなわち、ステップS703で肯定(Yes)と判断されるケースは、ダンプトラック20に異常が発生した結果、長時間停止が発生したと判断できるので、ダンプトラック20の点検又は修理が必要である可能性が高いと判断できるからである。
【0133】
次に、ステップS710に進み、異常解析部12hは、作成した点検提案に基づき、ダンプトラック20の番号及びエラーイベントの内容をレポートにグラフィック及び文字で出力する。このように、本解析例は、同じ経路を走行したダンプトラック20同士について、所定時間以上の長時間停止及び異常に関する異常情報に基づき、ダンプトラック20の点検提案を作成する。このため、ダンプトラック20の異常を抽出する精度が向上するので、異常が発生したダンプトラック20を速やかに点検、修理して復旧させることができる。その結果、鉱山の生産性低下を最小限に抑えることができる。鉱山の管理者又は運用者は、点検提案を受けて各ダンプトラック20の修理、予防保全又は鉱山のオペレーション計画の立案を行うことができる。
【0134】
<特定された経路を利用した稼働情報の解析例4>
図26は、稼働情報を解析して運転指導指標又は積載改善要求指標を作成する例を示すフローチャートである。図27は、鉱山で稼働する複数のダンプトラック20(20A、20B、20C)を示す図である。図28は、図27に示すダンプトラック20(20A、20B、20C)の運転者と経路とを示す図表である。この例は、同じ経路を走行したダンプトラック20の稼働情報から、必要に応じて運転者の技能を改善するための運転指導指標、過積載又は過小積載の改善を要求する積載改善要求指標を作成する。次に、稼働情報の解析例4の手順を説明する。
【0135】
稼働情報の解析例4を実行するにあたり、ステップS801において、図2に示す管理装置10が有する管理側処理装置12の運転解析部12iは、判別した経路を走行したダンプトラック20の稼働情報を抽出する。次に、ステップS802において、運転解析部12iは、特定の経路、すなわち同一の経路を走行した複数のダンプトラック20の稼働情報から運転者を抽出する。
【0136】
鉱山では、図27に示すように、複数のダンプトラック20A、20B、20Cが稼働している。鉱山においては、同一の運転者であっても、複数のダンプトラックを運転することがある。例えば、図28に示すように、運転者Aは、ダンプトラック20A、20Bを運転している。また、鉱山においては、一人の運転者が複数の経路を運転することがある。例えば、運転者A、B、Dは、それぞれ複数の経路を運転している。さらに、すべてのダンプトラック20A、20B、20Cが必ずすべての経路を走行するとは限らない。例えば、図28に示す例では、ダンプトラック20A、20B、20Cは、いずれもすべての経路R1、R2、R3、R4を走行していない。稼働情報から運転者に対する運転指導指標を作成する場合、同一の運転者の情報を抽出する必要がある。このため、ステップS802において、運転解析部12iは運転者を抽出する。
【0137】
次に、ステップS803において、各運転者の運転時に、所定の回数OL以上の過積載イベント(積載量情報)が発生していないと判断される場合(ステップS803、No)、ステップS804に進む。ステップS804において、各運転者の運転時に、所定の回数DL以上の過小積載イベント(積載量情報)が発生していないと判断される場合(ステップS804、No)、ステップS805に進む。ここで、過積載イベント又は過小積載イベントの情報は、次のように生成される。ダンプトラック20の車格、種類又は鉱山の運用規則に従って、積載量が過積載か過小積載かを判断する指標となる、適正積載量を予め設定し車載記憶装置31に記憶しておく。積載量は、上述のように圧力センサ26によって計測できるので、車載情報収集装置30は、計測された積載量が適正積載量と比較して多いか少ないかを判断し、多いと判断されたならば過積載イベントの情報を生成し、少ないと判断されたならば過小積載イベントの情報を生成する。生成された過積載イベントあるいは過小積載イベントは、車載記憶装置31に記憶される。適正積載量については、詳細を後述する。ステップS805において、運転解析部12iは、ステップS802における経路での平均サイクル時間(排土終了から積荷を積載して排土するまでに要した時間)、平均燃費(燃費情報)及び平均積載量(積載量情報)を稼働情報に基づいて各運転者ID毎に算出する。
【0138】
次に、ステップS806に進み、運転解析部12iは、各経路毎に設定されてる評価基準値Evを管理側記憶装置13から読み込む。評価基準値Evは、適正燃費と適正積載量と適正サイクル時間とを加算したものである。適正積載量は、ダンプトラック20に対し過積載が行われると車体21等に過度の負荷が作用したり、ブレーキ及びタイヤに負担をかけて異常な消耗や摩耗を起こすおそれがあるとして設計上決められる、ダンプトラック20の車格又は種類によって定められる最大積載量であることが好ましい。また、鉱山の生産性を考慮すると、過小積載は生産性を悪化させるため、過小積載と判断される積載量(過小積載量)を定め、過小積載量と最大積載量との間に適正積載量を設定してもよい。評価基準値Evは、ダンプトラック20の車格、種類又は走行する経路によって異なる値である。このため、評価基準値Evは、ダンプトラック20が走行する経路を設計した後に、シミュレーション又は実際にダンプトラック20に積荷を積載して走行させることにより求めた値を用いる。あるいは、運用時に複数のデータを取得して平均値として求めた値を評価基準値Evとして用いてもよい。次に、ステップS807に進み、運転解析部12iは、各運転者毎に評価値Eopを求める。Eopは、平均燃費と平均積載量と平均サイクル時間とを加算したものである。
【0139】
ステップS808において、公差をAに設定し、評価値Eopが評価基準値Evに公差Aを考慮した範囲にない(Ev−A≦Eop≦Ev+Aが成立しない)と判断される場合(ステップS808、No)、ステップS809に進み、運転解析部12iは、運転者の運転の改善を要求する運転指導指標としての運転指導提案を作成する。すなわち、公差Aを考慮しても評価値Eopが評価基準値Evを外れると判断される場合、その運転者の運転技能は改善の余地があると判断できるからである。一方、Ev−A≦Eop≦Ev+Aが成立すると判断される場合(ステップS808、Yes)、ステップS810に進み、運転解析部12iは、優良運転情報を作成する。
【0140】
次に、ステップS811において、運転解析部12iは、運転指導提案又は優良運転情報に基づき、経路識別ID、ダンプトラック番号又は運転者ID、評価値Eop、平均燃費と適正燃費との比較データ、平均積載量と適正積載量との比較データ及び平均サイクル時間と適正サイクルタ時間との比較データを、レポートにグラフィック及び文字で出力する。このように、本解析例は、同じ経路を走行したダンプトラック20について、同一の運転者を評価することにより、運転の改善が必要な運転者を抽出する精度を向上させることができる。このため、本解析例は、運転指導提案を提供することができる。その結果、運転者の運転技能を向上させて、ダンプトラック20に対して、過積載による車体21等の損傷、ブレーキの消耗抑制、タイヤ摩耗の抑制又は適正な制動距離による停止による安全確保を実現するとともに燃費低減を図り、鉱山の生産性低下を最小限に抑えることができる。鉱山の管理者又は運用者は、運転指導提案を受けて、運転者に対して、過積載や過小積載を行った運転の防止又は燃費に悪い運転の防止といった教育指導を施すことができる。また、運転者が直接、運転指導提案を受けて、運転の改善を図ることもできる。
【0141】
なお、評価基準値Evを、次のような手法にて定めてもよい。上述において、評価基準値Evは、単に適正燃費と適正積載量と適正サイクル時間とを加算したものとしたが、鉱山のオペレーションの考え方又は鉱山のオペレーションの計画(生産計画)によっては、これら3個の要素の重要度(重み)が異なる場合がある。例えば、ダンプトラック20の燃費は下位の重要度として、生産量を確保したい(積載量を稼ぎたい)といった場合がある。そこで、3個の要素に対して、重み係数a(a1,a2,a3)を積算して合計し、それを評価基準値Ev’とする。具体的には、Ev’=a1×(1/適正燃費)+a2×適正積載量+a3×(1/適正サイクル時間)という算出式によって評価基準値Evを求め、設定しておく。このような手法によれば、3個の要素(適正燃費、適正積載量、適正サイクル時間)は固定したまま、鉱山のオペレーションの考え方又は計画に応じて、重み係数であるa(a1,a2,a3)を変更することで、適正な運転指導提案を作成することが可能となる。なお、この手法による場合の公差Aは、上述の公差Aとは異なる値で、この手法による評価基準値Ev’に応じた公差A’となる。
【0142】
次に、ステップS804に戻って説明する。各運転者の運転時に、所定の回数DL以上の過小積載イベントが発生したと判断される場合(ステップS804、Yes)、ステップS812に進む。ステップS812において、図2に示す管理装置10が有する管理側処理装置12の積載量解析部12jは、積載改善要求指標としての過小積載改善提案を作成する。次に、ステップS813に進み、積載量解析部12jは、過小積載改善提案に基づき、運転者ID(油圧ショベル等の積込機4を運転する運転者のID及びダンプトラック20の運転者のID)と過小積載量と過小積載回数とをレポートにグラフィック及び文字で出力する。なお、積込機4の運転者のIDは、予め管理側記憶装置13に登録し記憶しておき、特定の経路の情報と関連付けておくことで、その特定の経路で行われた積込作業に関わった積込機4(積込機4の運転者ID)を抽出することができる。また、積込機4に上述のような読み取り装置51を備え、読み取られた運転者IDを積込作業に関わったダンプトラック20に無線通信で送信し、ダンプトラック20の車載無線通信装置27を介して車載記憶装置31に記憶するようにしておけば、特定の経路で行われた積込作業に関わった積込機4(積込機4の運転者ID)を抽出することができる。このようにすることで、過小積載の改善を促すことができるので、鉱山の生産性低下を最小限に抑えることができる。また、過小積載が頻繁に行われることは、ダンプトラック20が頻繁に経路を走行し燃料消費が多くなることにもなるため、過小積載改善提案を受けたダンプトラック20又は積込機4の運転者は、改善を図ることでダンプトラック20の燃料消費を抑制することができる。
【0143】
次に、ステップS803に戻って説明する。各運転者の運転時に、所定の回数OL以上の過積載イベントが発生したと判断される場合(ステップS803、Yes)、ステップS814に進む。ステップS814において、積載量解析部12jは、積載改善要求指標として過積載改善提案を作成する。次に、ステップS815に進み、積載量解析部12jは、過積載改善提案に基づき、運転者ID(油圧ショベル等の積込機4を運転する運転者のID及びダンプトラック20の運転者のID)と過小積載量と過小積載回数とをレポートにグラフィック及び文字で出力する。このようにすることで、過積載の改善を促すことができるので、ダンプトラック20の損傷の防止と安全の確保を行うことができる。
【符号の説明】
【0144】
1 鉱山機械の管理システム(管理システム)
2 給油所
3 中継器
4 油圧ショベル
5A、5B、5C GPS衛星
6 中間中継器
7 通信可能範囲
10 管理装置
12 管理側処理装置
12a 走行経路特定部
12b 勾配解析部
12c 路面状態解析部
12d 燃費解析部
12e 渋滞解析部
12f 走行経路解析部
12g 運転者状態解析部
12h 異常解析部
12i 運転解析部
12j 積載量解析部
13 管理側記憶装置
15 入出力部
16 表示装置
17 入力装置
18 管理側無線通信装置
18A アンテナ
19 出力装置
20、20A、20B、20C ダンプトラック
21 車両本体
22 ベッセル
23 車輪
24 サスペンションシリンダー
25 回転センサ
26 圧力センサ
27 車載無線通信装置
29 位置情報検出装置
30 車載情報収集装置
31 車載記憶装置
32A エンジン制御装置
32B 走行制御装置
32C 油圧制御装置
33A アクセル
33B シフトレバー
33C ダンプレバー
35 作動油コントロールバルブ
36 ホイストシリンダー
37 走行装置
38 取得装置
39 傾斜計(傾斜センサ)
50a〜50g 識別体
51 読み取り装置
【技術分野】
【0001】
本発明は、鉱山機械を管理するシステム及び方法に関する。
【背景技術】
【0002】
土木作業現場又は鉱山の採石現場では、油圧ショベル、ダンプトラック等、様々な建設機械が稼働する。近年においては、無線通信によって建設機械の稼働情報を取得し、建設機械の状態を把握することが行われつつある。例えば、特許文献1には、GPS(Global Positioning System)情報を使い、積込地点及び積み卸し地点のみの一致で輸送車両のサイクル時間実績を自動収集し、その後の配車計画を算出する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−244247号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1は、配車計画を目的としているため、積込地点及び積み卸し地点のみの評価になる。しかし、生産性向上のための走路設計評価又は運転者の運転指導等を目的とする場合、走行経路毎の解析が必要になり、積込地点及び積み卸し地点のみの評価では不十分である。
【0005】
本発明は、鉱山において、鉱山機械が走行した経路を区別して特定することを目的とする。また、本発明は、鉱山機械の生産性評価や鉱山機械の運転者の運転指導を行うことを目的とする。
【課題を解決するための手段】
【0006】
本発明は、鉱山で作業する鉱山機械に搭載されて、前記鉱山機械の稼働状態に関する稼働情報を収集する車載情報収集装置と、前記鉱山機械に搭載されて通信を行う車載無線通信装置と、前記車載無線通信装置と通信する管理側無線通信装置と、前記車載無線通信装置と前記管理側無線通信装置とを介して前記稼働情報を収集する管理装置と、を含み、前記管理装置は、前記稼働情報に含まれる、前記鉱山機械が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報に基づき、前記鉱山機械が走行した経路を特定する、ことを特徴とする鉱山機械の管理システムである。
【0007】
本発明は、鉱山で作業する鉱山機械に搭載されて、前記鉱山機械の稼働状態に関する稼働情報を収集する車載情報収集装置と、前記鉱山機械に搭載されて通信を行う車載無線通信装置と、を含み、前車載情報収集装置は、前記稼働情報に含まれる、前記鉱山機械が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報と、予め設定された指定経路の位置情報とに基づき、前記鉱山機械が走行した経路を特定し、前記車載無線通信装置は、特定された前記鉱山機械が走行した経路を管理装置に送信する、ことを特徴とする鉱山機械の管理システムである。
【0008】
本発明において、前記鉱山機械が走行した経路は、排土場における位置情報と、積込場における位置情報と、前記排土場と前記積込場との間における2箇所の位置情報と、に基づいて特定されることが好ましい。
【0009】
本発明において、前記鉱山機械が走行した経路が特定される際に、前記経路に含まれる複数箇所の位置情報の数値が丸められることが好ましい。
【0010】
本発明において、前記稼働情報が収集された鉱山機械が走行したとして特定された経路と、収集された前記稼働情報とを対応付けて記憶する管理側記憶装置を有することが好ましい。
【0011】
本発明において、前記管理装置は、前記稼働情報を解析するにあたって、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から路面の凹凸に関する路面情報を抽出し、抽出した前記路面情報に基づいて路面の整備に関する指標を作成することが好ましい。
【0012】
本発明において、前記管理装置は、前記稼働情報を解析するにあたって、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行中の燃料消費に関する燃費情報を抽出し、抽出した前記燃費情報に基づいて燃料消費に関する指標を作成することが好ましい。
【0013】
本発明において、前記管理装置は、前記稼働情報を解析するにあたって、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行時間と停止時間とを抽出し、抽出した前記走行中時間と前記停止時間とに基づいて鉱山機械の走行速度の改善に関する指標を作成することが好ましい。
【0014】
本発明において、前記管理装置は、前記稼働情報を解析するにあたって、前記走行速度の改善に関する指標に対応する経路を走行した複数の鉱山機械の稼働情報から、所定時間以上の停止に関する長時間停止情報と、前記複数の鉱山機械の異常に関する異常情報とを抽出し、抽出した前記長時間停止情報と前記異常情報とに基づいて、鉱山機械の点検に関する指標を作成することが好ましい。
【0015】
本発明において、前記管理装置は、前記稼働情報を解析するにあたって、前記走行速度の改善に関する指標に対応する経路を走行した鉱山機械の稼働情報から、さらに前記所定時間以上の停止が発生した位置に関する長時間停止位置情報を抽出し、抽出した前記長時間停止情報及び長時間停止位置情報に基づいて、鉱山機械の運転者の勤怠状態に関する疲労確認指標又は前記鉱山機械の経路の変更に関する経路変更指標を作成することが好ましい。
【0016】
本発明において、前記管理装置は、前記稼働情報を解析するにあたって、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報を抽出し、抽出した前記積載量情報に基づいて、過積載の改善又は過小積載の改善を要求する積載改善要求指標を作成することが好ましい。
【0017】
本発明において、前記管理装置は、前記稼働情報を解析するにあたって、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報と、走行中の燃料消費に関する燃費情報と、排土終了から積荷を積載して排土するまでに要した時間に関するサイクル時間情報とを抽出し、抽出した前記積載量情報と、前記燃費情報と、前記サイクル時間情報とに基づいて、鉱山機械を運転する運転者の運転の改善を要求する、運転指導指標を作成することが好ましい。
【0018】
本発明において、前記管理装置は、前記特定された経路の勾配に応じて複数のセクションに分割し、分割された前記セクション毎に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報を解析することが好ましい。
【0019】
本発明は、鉱山で作業する鉱山機械の稼働情報を取得する手順と、前記稼働情報に含まれる、前記鉱山機械が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報に基づき、前記鉱山機械が走行した経路を特定する手順と、を含むことを特徴とする鉱山機械の管理方法である。
【0020】
本発明において、前記鉱山機械が走行した経路は、排土場における位置情報と、積込場における位置情報と、前記排土場と前記積込場との間における2箇所の位置情報と、に基づいて特定されることが好ましい。
【0021】
本発明において、前記鉱山機械が走行した経路が特定される際に、前記経路に含まれる複数箇所の位置情報の数値が丸められることが好ましい。
【0022】
本発明において、前記稼働情報が収集された鉱山機械が走行したとして特定された経路と、収集された前記稼働情報とを対応付けて記憶する管理側記憶装置を有することが好ましい。
【0023】
本発明において、前記経路が特定された後に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から路面の凹凸に関する路面情報を抽出する手順と、抽出した前記路面情報に基づいて路面の整備に関する指標を作成する手順と、を含むことが好ましい。
【0024】
本発明において、前記経路が特定された後に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行中の燃料消費に関する燃費情報を抽出する手順と、抽出した前記燃費情報に基づいて燃料消費に関する指標を作成する手順と、を含むことが好ましい。
【0025】
本発明において、前記経路が特定された後に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行時間と停止時間とを抽出する手順と、抽出した前記走行中時間と前記停止時間とに基づいて鉱山機械の走行速度の改善に関する指標を作成する手順と、を含むことが好ましい。
【0026】
本発明において、前記経路が特定された後に、前記走行速度の改善に関する指標に対応する経路を走行した複数の鉱山機械の稼働情報から、所定時間以上の停止に関する長時間停止情報と、前記複数の鉱山機械の異常に関する異常情報とを抽出する手順と、抽出した前記長時間停止情報と前記異常情報とに基づいて、鉱山機械の点検に関する指標を作成する手順と、を含むことが好ましい。
【0027】
本発明において、前記経路が特定された後に、前記走行速度の改善に関する指標に対応する経路を走行した鉱山機械の稼働情報から、さらに前記所定時間以上の停止が発生した位置に関する長時間停止位置情報を抽出する手順と、抽出した前記長時間停止情報及び長時間停止位置情報に基づいて、鉱山機械の運転者の勤怠状態に関する疲労確認指標又は前記鉱山機械の経路の変更に関する経路変更指標を作成する手順と、を含むことが好ましい。
【0028】
前記経路が特定された後に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報を抽出する手順と、抽出した前記積載量情報に基づいて、過積載の改善又は過小積載の改善を要求する積載改善要求指標を作成する手順と、を含むことが好ましい。
【0029】
前記経路が特定された後に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報と、走行中の燃料消費に関する燃費情報と、排土終了から積荷を積載して排土するまでに要した時間に関するサイクル時間情報とを抽出する手順と、抽出した前記積載量情報と、前記燃費情報と、前記サイクル時間情報とに基づいて、鉱山機械を運転する運転者の運転の改善を要求する運転指導指標を作成する手順と、を含むことが好ましい。
【0030】
前記経路が特定された後に、前記特定された経路の勾配に応じて複数のセクションに分割し、分割された前記セクション毎に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報を解析することが好ましい。
【発明の効果】
【0031】
本発明は、鉱山において、鉱山機械が走行した経路を区別して特定することができる。また、本発明は、鉱山機械の生産性評価や鉱山機械の運転者の運転指導を行うことができる。
【図面の簡単な説明】
【0032】
【図1】図1は、本実施形態に係る鉱山機械の管理システムが適用される現場を示す図である。
【図2】図2は、実施形態1に係る鉱山機械の管理システムが有する管理装置の機能ブロック図である。
【図3】図3は、ダンプトラックの構成を示す図である。
【図4】図4は、車載情報収集装置及びその周辺機器を示す機能ブロック図である。
【図5】図5は、経路の模式図である。
【図6】図6は、本実施形態に係る経路特定処理の手順を示すフローチャートである。
【図7】図7は、経路特定処理においてデータ数を圧縮する手順を示す図である。
【図8】図8は、経路特定処理においてデータ数を圧縮する手順を示す図である。
【図9】図9は、経路特定処理においてデータ数を圧縮する手順を示す図である。
【図10】図10は、位置情報と走行距離等との関係を示す図表である。
【図11】図11は、比較対象位置を特定する処理の手順を示すフローチャートである。
【図12】図12は、比較対象位置を特定する処理を示す模式図である。
【図13】図13は、ダンプトラックが走行する経路のパターンを示す模式図である。
【図14】図14は、経路特定処理の後処理の手順を示すフローチャートである。
【図15】図15は、経路解析の手順を示すフローチャートである。
【図16】図16は、経路解析の手順を示すフローチャートである。
【図17】図17は、経路解析の説明図である。
【図18】図18は、経路解析の説明図である。
【図19】図19は、経路解析の説明図である。
【図20】図20は、経路特定処理の第2変形例を説明するための図である。
【図21】図21は、領域IDと位置情報等との関係を示す図表である。
【図22】図22は、稼働情報を解析して路面整備提案を作成する例を示すフローチャートである。
【図23】図23は、稼働情報の解析の説明に用いる図である。
【図24】図24は、稼働情報を解析して燃費改善提案又は渋滞改善提案を作成する例を示すフローチャートである。
【図25】図25は、稼働情報を解析して経路変更提案、運転者疲労確認提案又は点検提案を作成する例を示すフローチャートである。
【図26】図26は、稼働情報を解析して運転指導指標又は積載改善要求指標を作成する例を示すフローチャートである。
【図27】図27は、鉱山で稼働する複数のダンプトラックを示す図である。
【図28】図28は、図27に示すダンプトラックの運転者と経路とを示す図表である。
【発明を実施するための形態】
【0033】
本発明を実施するための形態(実施形態)につき、図面を参照しつつ詳細に説明する。以下の実施形態に記載した内容により本発明が限定されるものではない。また、以下に記載した構成要素には、当業者が容易に想定できるもの、実質的に同一のものが含まれる。さらに、以下に記載した構成要素は適宜組み合わせることが可能である。また、本発明の要旨を逸脱しない範囲で構成要素の種々の省略、置換又は変更を行うことができる。
【0034】
図1は、本実施形態に係る鉱山機械の管理システムが適用される現場を示す図である。鉱山機械の管理システム1は、鉱山機械の状態に関する情報を収集して、鉱山機械の状態を把握したり、生産性向上のために鉱山機械が走行する経路(以下、走行経路とはダンプトラック20が走行する経路と停止する場所とを含めたものであるとし、走行経路を経路と略す)の評価をしたり、鉱山機械の燃費に関する指標を作成したり、鉱山機械の運転者の運転に関する指標を作成したりするものである。鉱山機械とは、鉱山において各種作業に用いる機械類の総称である。本実施形態において、鉱山機械の一種の運搬車両として、砕石又は砕石の採掘時に発生した土砂若しくは岩石等を運搬するダンプトラック20を例とするが、これに限定されるものではない。例えば、本実施形態に係る鉱山機械は、砕石等を採掘する掘削機械として機能する油圧ショベル若しくは電気ショベル又はホイールローダであってもよい。鉱山において、ダンプトラック20は、積込作業が行われる場所(以下、積込場)LPで油圧ショベル4によって岩石又は土砂等が積載される。そして、ダンプトラック20は、積荷の排出作業が行われる場所(以下、排土場)DPで積載した岩石又は土砂等を排土するために降ろす。ダンプトラック20は、積込場LPと排土場DPとの間を、経路Rg、Rrを走行して移動する。
【0035】
<鉱山機械の管理システムの概要>
鉱山機械の管理システム(以下、必要に応じて管理システムという)1は、管理装置10が、無線通信によって鉱山機械としてのダンプトラック20の稼働情報を、ダンプトラック20から収集するものである。管理装置10は、移動体であるダンプトラック20とは異なり、例えば、鉱山の管理施設に設置されている。このように、管理装置10は、原則として移動を考慮していないものである。管理装置10が収集したダンプトラック20の稼働情報は、ダンプトラック20の稼働状態に関する情報であり、例えば、ダンプトラック20の位置情報(緯度、経度及び高度の座標)、走行時間、走行距離、エンジン水温、異常の有無、異常の箇所、燃料消費率又は積載量等である。稼働情報は、主としてダンプトラック20の予防保全及び異常診断等に用いられる。したがって、稼働情報は、鉱山の生産性向上又は鉱山のオペレーションの改善といったニーズに応えるために有用である。
【0036】
管理装置10が、鉱山で作業するダンプトラック20の稼働情報を収集するために、管理装置10には、アンテナ18Aを有する管理側無線通信装置18に接続されている。ダンプトラック20は、稼働情報を送信したり、管理装置10と相互通信を行うために、車載無線通信装置27とともにアンテナ28Aを有している。この他に、ダンプトラック20は、GPS(Global Positioning System:全方位測位システム)衛星5A、5B、5Cからの電波をGPS用アンテナ28Bで受信し、自己位置を測位することができる。なお、自身の位置を計測するためには、GPS衛星に限らず他の測位用衛星によるものでもよい。すなわち、GNSS(全地球航法衛星システム:Global Navigation Satellite System)による位置計測ができればよい。
【0037】
ダンプトラック20がアンテナ28Aから送信する電波の出力は、鉱山全域をカバーできるほどの通信可能範囲を有していない。また、アンテナ28Aから送信する電波は、波長の関係から高い山などの障害物を越えて遠方まで送信することができない。もちろん、高出力の電波を出力できる無線通信装置を用いれば、このような通信障害が解消し、通信可能範囲は広がり通信不可能な場所をなくすことはできるが、鉱山は広大であるため、中継器や通信装置のコストを抑える必要があることや、鉱山がある地域によっては整備された通信インフラを確保することが期待できないといった状況に対応するために、無線LAN(Local Area Network)などの限られた範囲内で情報通信網を形成できる無線システムを用いる。無線LANなどによれば、低コストで鉱山機械と管理施設(情報収集装置10)との相互通信を整えることは可能ではあるものの通信障害の問題を解決する必要がある。
【0038】
ダンプトラック20がアンテナ28Aから送信する電波の到達範囲は限られている。したがって、ダンプトラック20と管理装置10との距離が離れていたり、両者間に山M等の障害物が存在していたりすると、管理側無線通信装置18は、ダンプトラック20から送信される電波を受信することができない。このため、管理システム1は、ダンプトラック20のアンテナ28Aから送信される電波を中継して、管理側無線通信装置18に中継する中継器3を有している。鉱山内の複数個所に中継器3を設置することにより、管理装置10は、自身から離れた位置で稼働しているダンプトラック20から、無線通信により稼働情報等を収集することができる。
【0039】
中継器3から管理側無線通信装置18までの距離が遠い場合、中継器3と管理側無線通信装置18との間に、両者を中継するための中間中継器6が配置される。本実施形態において、中間中継器6は、中継器3と管理側無線通信装置18とを中継するのみであり、ダンプトラック20がアンテナ28Aから送信する電波を中継するものではない。本実施形態において、中間中継器6は、対応する中継器3以外からは電波を中継しないようになっている。例えば、図1に示すように、給油所2の中継器3からの電波を中継するのは、1台の中間中継器6のみである。なお、中間中継器6は、図1では、1つの中継器3と一対一の関係であるように表現しているが、一対一の関係に限定するものではなく、各中間中継器6は、対応する複数の中継器3から送られる電波を中継することができる。
【0040】
中継器3の配置場所を中心とする周囲の所定領域(図1では円形で示す領域)は、ダンプトラック20に搭載された第1無線通信装置(車載無線通信装置27)が中継器3との間で相互に無線通信が可能な範囲、すなわち、通信可能範囲7である。通信可能範囲7に存在しているダンプトラック20は、中継器3等を介して管理側無線通信装置18と相互に無線通信することができる。
【0041】
管理装置10が無線通信によってダンプトラック20から稼働情報等を収集する場合、ダンプトラック20が管理装置10に稼働情報等を送信中にダンプトラック20が走行して移動することによって、ダンプトラック20が通信可能範囲7から出てしまい、管理装置10に送信すべき稼働情報等のすべてを送信する前に通信が中断してしまうことがある。このため、管理装置10が稼働情報等を受信している間、言い換えればダンプトラック20が稼働情報等を送信している間は、ダンプトラック20が通信可能範囲7に存在することが好ましい。このため、ダンプトラック20が確実に通信可能範囲7に存在するように、ダンプトラック20が停止している状態にある場所でダンプトラック20のアンテナ28Aからの電波を受信することが好ましい。したがって、ダンプトラック20が、確実に通信可能範囲7に、ある程度の時間(送信すべき稼働情報等のすべてを送信できる程度の時間以上の時間)停車することが行われる場所で、ダンプトラック20から稼働情報等を中継器3に向けて送信するように制御することが好ましい。
【0042】
このため、本実施形態では、例えば、給油所2に中継器3を設置する。給油所2では、ダンプトラック20のエンジンを駆動するための燃料を給油するために、ダンプトラック20はある程度の時間の停車をすることが見込まれる。このため、管理装置10が給油中のダンプトラック20から稼働情報等を確実に受信するための時間の間、ダンプトラック20は確実に通信可能範囲7に存在した状態を維持することができる。その結果、管理装置10は、無線通信によってダンプトラック20から稼働情報等を確実に収集することができる。なお、鉱山は広大であるため、本実施形態では、給油所2以外にもダンプトラック20の移動経路の近傍に中継器3を配置して、稼働中のダンプトラック20から稼働情報等を収集するようにする。次に、管理装置10について、より詳細に説明する。
【0043】
<管理装置>
図2は、実施形態1に係る鉱山機械の管理システムが有する管理装置の機能ブロック図である。管理装置10は、管理側処理装置12と、管理側記憶装置13と、入出力部(I/O)15とを含む。さらに、管理装置10は、入出力部15に、表示装置16と、入力装置17と、管理側無線通信装置18と、出力装置19とを接続している。管理装置10は、例えば、コンピュータである。管理側処理装置12は、例えば、CPU(Central Processing Unit)である。管理側記憶装置13は、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ若しくはハードディスクドライブ等又はこれらを組み合わせて構成されている。入出力部15は、管理側処理装置12と、管理側処理装置12の外部に接続する表示装置16、入力装置17、管理側無線通信装置18及び出力装置19との情報の入出力(インターフェース)に用いられる。
【0044】
管理側処理装置12は、本実施形態に係る鉱山機械の管理方法を実行する。管理側処理装置12は、走行経路特定部12aと、勾配解析部12bと、路面状態解析部12cと、燃費解析部12dと、渋滞解析部12eと、走行経路解析部12fと、運転者状態解析部12gと、異常解析部12hと、運転解析部12iと、積載量解析部12jとを含む。
【0045】
走行経路特定部12aは、ダンプトラック20が走行した経路を特定する。勾配解析部12bは、ダンプトラック20が走行した経路を解析し、勾配の範囲毎に経路を分割する。路面状態解析部12cは、ダンプトラック20の稼働情報からダンプトラック20が走行する経路の路面の状態を解析する。燃費解析部12dは、ダンプトラック20の稼働情報から、燃費(単位量の燃料で走行できる距離、所定の距離を走行するのに必要な燃料消費の量又は単位時間当たりの燃料消費の量等)に関する情報を抽出して解析する。渋滞解析部12eは、ダンプトラック20の稼働情報から、鉱山内の経路の一部である走行路又は積込場LP等における渋滞の発生の有無等を解析する。走行経路解析部12fは、ダンプトラック20の停止時間及び停止位置等に基づいて、ダンプトラック20が走行する経路を変更すべきか否かを解析する。運転者状態解析部12gは、ダンプトラック20の停止時間及び停止位置等に基づいて、運転者の勤怠状態又は運転者の疲労度等を解析する。異常解析部12hは、ダンプトラック20の稼働情報から、ダンプトラック20に発生した異常の有無や内容等を解析する。運転解析部12iは、ダンプトラック20の稼働情報から、ダンプトラック20の運転者の運転技能を解析する。積載量解析部12jは、ダンプトラック20の稼働情報に含まれる積載量から、ダンプトラック20の積載状態等を解析する。これらの機能は、管理側処理装置12がそれぞれに対応するコンピュータプログラムを管理側記憶装置13から読み込んで実行することにより実現される。
【0046】
管理側記憶装置13は、ダンプトラック20の稼働情報等を収集するための稼働情報収集用コンピュータプログラム、本実施形態に係る鉱山機械の管理方法を実現して、ダンプトラック20が走行した経路を特定する経路特定用コンピュータプログラム、稼働情報等に基づいて各種解析を実現するコンピュータプログラム、ダンプトラック20が走行する経路が記述された経路リスト14R及びダンプトラック20から収集した稼働情報のデータベース(稼働情報データベース)14Iを記憶している。経路リスト14Rは、ダンプトラック20が走行する経路及びダンプトラック20が走行した経路が記述されたデータベースであり、緯度、経度及び高度の座標の集合データで構成されている。
【0047】
本実施形態において、管理装置10は、ダンプトラック20が排土場DPから積荷(砕石又は砕石の採掘時に発生した土砂若しくは岩石等)を積み込むための積込場LPに移動し、再び排土場DPに移動する経路に含まれる、少なくとも4箇所の位置情報に基づき、ダンプトラック20が走行した経路を特定する。すなわち、管理装置10は、少なくとも排土場DPの位置情報、積込場LPの位置情報、排土場DPと積込場LPとの間における2箇所の位置情報、これらに基づいてダンプトラック20が走行した経路を特定する。上述した経路特定用コンピュータプログラムは、前述した少なくとも4箇所の位置情報に基づいてダンプトラック20が走行した経路を特定するための処理を実現するための命令が記述されている。管理装置10、より具体的には管理側処理装置12は、経路特定用コンピュータプログラムを管理側記憶装置13から読み出し、経路特定用コンピュータプログラムに記述されている命令を実行することにより、ダンプトラック20が走行した経路を特定する。管理装置10は、特定した経路を示す情報やデータを管理側記憶装置13に記憶させる。
【0048】
表示装置16は、例えば、液晶ディスプレイ等であり、ダンプトラック20の稼働情報を収集する際に必要な情報を表示する。入力装置17は、例えば、キーボード、タッチパネル又はマウス等であり、ダンプトラック20の稼働情報を収集する際に必要な情報を入力する。管理側無線通信装置18は、アンテナ18Aを有しており、中継器3を介してダンプトラック20の車載無線通信装置27との間で相互に無線通信を実行する。出力装置19は、例えば、印刷装置(プリンタ)である。出力装置19は、管理装置10が作成したレポート等を印刷して出力する。出力装置19は、さらに後述するレポート内容に応じた音声を出力するものであってもよい。次に、ダンプトラック20について、より詳細に説明する。
【0049】
<ダンプトラック>
図3は、ダンプトラックの構成を示す図である。ダンプトラック20は、積荷を積載して走行し、所望の場所でその積荷を排出する。ダンプトラック20は、車両本体21と、ベッセル22と、車輪23と、サスペンションシリンダー24と、回転センサ25と、サスペンション圧力センサ(圧力センサ)26と、アンテナ28Aが接続された車載無線通信装置27と、GPS用アンテナ28Bが接続された位置情報検出装置(本実施形態ではGPS受信機)29と、車載情報収集装置30と、を有する。なお、ダンプトラック20は、上記構成以外にも一般的な運搬機が備えている各種の機構及び機能を備えている。なお、本実施形態1では、前輪(車輪23)で操舵するタイプのダンプトラック20を例として説明するが、車体を前部と後部に分割しそれらを自由関節で結合したアーティキュレート式ダンプトラックにも適用可能である。
【0050】
ダンプトラック20は、ディーゼルエンジン等の内燃機関が発電機を駆動することによって発生した電力で電動機を駆動し、車輪23を駆動する。このように、ダンプトラック20は、いわゆる電気駆動方式であるが、ダンプトラック20の駆動方式はこれに限定されるものではない。ベッセル22は、積荷を積載する荷台として機能するものであり、車両本体21の上部に配置されている。ベッセル22には、積荷として、採石された砕石又は岩若しくは土等が油圧ショベル等の積込機4によって積載される。車輪23は、タイヤとホイールで構成され車両本体21に装着されており、上述したように車両本体21から動力が伝達されることで駆動される。サスペンションシリンダー24は、車輪23と車両本体21との間に配置されている。車両本体21及びベッセル22、さらに積荷が積載された際における積荷の重量に応じた負荷が、サスペンションシリンダー24を介して車輪23に作用する。
【0051】
回転センサ25は、車輪23の回転速度を検出することで車速を計測する。サスペンションシリンダー24は内部に作動油が封入されており、積荷の重量に応じて伸縮動作する。なお、サスペンション圧力センサ(必要に応じて圧力センサともいう)26は、サスペンションシリンダー24に作用する負荷を検出する。圧力センサ26は、ダンプトラック20の各サスペンションシリンダー24に設置されており、その作動油の圧力を検出することで積荷の重量(積載量)を計測することができる。GPS用アンテナ28Bは、GPS(Global Positioning System)を構成する複数のGPS衛星5A、5B、5C(図1参照)から出力される電波を受信する。GPS用アンテナ28Bは、受信した電波を位置情報検出装置29に出力する。位置情報検出装置29は、GPS用アンテナ28Aが受信した電波を電気信号に変換し、自身の位置情報、すなわちダンプトラック20の位置情報を算出(測位)する。車載無線通信装置27は、アンテナ28Aを介して図1に示す中継器3あるいは管理施設のアンテナ18Aとの間で相互に無線通信を行う。車載無線通信装置27は、車載情報収集装置30に接続されている。このような構造により、車載情報収集装置30は、アンテナ28Aを介して各情報を送受信する。次に、車載情報収集装置30及びその周辺機器について説明する。
【0052】
<車載情報収集装置及びその周辺機器>
図4は、車載情報収集装置及びその周辺機器を示す機能ブロック図である。ダンプトラック20が有する車載情報収集装置30は、車載記憶装置31と、車載無線通信装置27と、位置情報検出装置29とが接続されている。車載情報収集装置30には、さらに、状態取得装置が接続されている。車載情報収集装置30は、例えば、CPU(Central Processing Unit)とメモリとを組み合わせたコンピュータである。
【0053】
車載情報収集装置30は、鉱山機械としてのダンプトラック20の様々な稼働状態の情報を取得し、収集するための装置である。例えば、状態取得装置は、サスペンションシリンダー24に設置された圧力センサ26その他の各種センサ類、エンジン制御装置32A、走行制御装置32B、油圧制御装置32C、運転者ID取得装置38及び傾斜センサ(傾斜計)39等である。車載情報収集装置30は、このような状態取得装置からダンプトラック20の様々な稼働状態の情報を取得し、取得したこれらの情報を稼働情報として収集する。
【0054】
例えば、車載情報収集装置30は、エンジン制御装置32Aから燃料噴射装置(FI)34Fの制御量を取得することにより、燃料噴射量を示す情報を取得することができる。燃料噴射量を示す情報によって、燃費に関する情報を得ることができる。また、車載情報収集装置30は、エンジン制御装置32Aを介してアクセル33Aの操作量を示す情報を取得することができる。ダンプトラック20の運転者によるアクセル33Aの操作量を示す情報により、ダンプトラック20の運転者の操作状態を把握することができる。また、車載情報収集装置30は、エンジン制御装置32Aから、エンジン(EG)34Gの回転速度、冷却水温度及び潤滑油圧力等といった各種情報を取得することができる。エンジン(EG)34Gの回転速度の情報は、図示しないエンジン(EG)34Gの出力軸に取り付けられた回転センサ等により検出された回転速度により取得され、冷却水温度及び潤滑油圧力等といった各種情報も、図示しない温度センサや圧力センサにより取得される。
【0055】
また、車載情報収集装置30は、走行制御装置32Bからトランスミッションの状態及びドライブシャフトの回転速度といった、走行装置37の各種情報を得ることができる。また、車載情報収集装置30は、走行制御装置32Bを介してシフトレバー33Bの操作位置又は操作量を取得することにより、ダンプトラック20の運転者の操作状態を把握することができる。シフトレバー33Bは、運転者がダンプトラック20の前進、後進又は走行速度段の変更を走行制御装置32Bに対して指示する際に用いられるものである。
【0056】
さらに、車載情報収集装置30は、油圧制御装置32Cから作動油コントロールバルブ(CV)35の開閉状態を取得することができる。この例において、作動油コントロールバルブ35はベッセル22を昇降させるホイストシリンダー36(油圧シリンダ)に、エンジン34Gの稼働により駆動するオイルポンプ(OP)34Pから吐出される作動油を供給したり、ホイストシリンダー36から作動油を排出したりする。このため、車載情報収集装置30は、作動油コントロールバルブ35の開閉状態に基づいて、ベッセル22の昇降状態を把握することができる。ベッセル22は、運転者がダンプレバー33Cを操作することにより昇降する。このため、車載情報収集装置30は、油圧制御装置32Cを介してダンプレバー33Cの操作量又は操作位置を取得することによっても、ベッセル22の昇降状態を把握することができる。
【0057】
車載情報収集装置30は、圧力センサ26が検出したサスペンションシリンダー24の作動油に作用する圧力を取得することにより、ベッセル22に積載された積荷の重量を把握することができる。ダンプトラック20の各車輪23に備えられた圧力センサ26(車輪23が4輪の場合、4個の圧力センサ26)が示す計測値を合計することで、積荷の重量(積載量)を求めることができる。また、圧力センサ26が検出したサスペンションシリンダー24の作動油に作用する圧力の時系列変化を見ることにより、ダンプトラック20のベッセル22に積荷が積載されているか、ベッセル22から排土中(排土されたか)を知ることができる。例えば、圧力センサ26が検出した圧力が上昇し、所定の値(例えば、ダンプトラック20の規定積載量の半分に相当する値)を超えた場合、積込場LPで積荷の積載を受けていると判断することができる。また、圧力センサ26が検出した圧力が低下し、所定の値(例えば、ダンプトラック20の規定積載量の1/4に相当する値)を下回った場合、排土場DPで排土している(あるいは排土された)と判断することができる。排土又は積載の判断は、圧力センサ26が検出したサスペンションシリンダー24の作動油に作用する圧力に加え、例えば、ダンプレバー33Cの操作状態(操作位置あるいは操作量)又はダンプトラック20の位置情報等を併用することにより、判断の精度を向上させることができる。
【0058】
運転者ID取得装置38は、ダンプトラック20の運転者を特定するための運転者IDを取得するための装置である。ダンプトラック20は、複数の運転者により交代で運転されることがある。運転者IDは、例えば、個々の運転者のIDキー(個人識別情報が記憶された電子キー)又は個々の運転者のIDカード(個人識別情報が記憶されたカード)から取得することができる。この場合、運転者ID取得装置38は、磁気読み取り装置又は無線通信装置等が用いられる。また、運転者ID取得装置38として指紋認証装置を備え、予め記憶した運転者の指紋と、個々の運転者の指紋との指紋認証を行い、運転者IDを取得することもできる。また、個々の運転者が、入力装置で自身のID情報(暗証番号等の個人識別情報)を入力し、予め記憶されているID情報との照合によっても運転者IDを取得することができる。このように、運転者ID取得装置38は、IDキー又はIDカードの読み取り装置、指紋認証装置又はID情報入力装置等であり、ダンプトラック20の運転室内の運転席近傍に設けていてもよいし、運転者が運転室にアクセスする際に近づく車体21の任意の場所に設けてもよい。なお、鉱山の日々の生産計画にしたがって、各ダンプトラック20に搭乗する運転者の運転者IDが、管理装置10から無線通信でダンプトラック20に送信されることもある。この場合車載無線通信装置27が運転者ID取得装置38を兼ねることになる。運転者ID取得装置38が取得した運転者IDにより、どの運転者がダンプトラック20を運転しているかを特定することができる。
【0059】
傾斜センサ39は、ダンプトラック20の傾きを検出する。傾斜センサ39は、ダンプトラック20の前後方向の傾き及び幅方向の傾きを検出することができる。傾斜センサ39により、ダンプトラック20が走行している路面の勾配又は凹凸を検出することができる。
【0060】
車載記憶装置31は、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ若しくはハードディスクドライブ等又はこれらを組み合わせて構成されている。車載記憶装置31は、車載情報収集装置30が稼働情報を収集するための命令が記述されたコンピュータプログラム及び鉱山機械の管理システム1を運用するための各種設定値等を記憶している。車載情報収集装置30は、前記コンピュータプログラムを読み出し、所定のタイミングで状態取得装置から稼働情報を取得して、車載記憶装置31へ一時的に記憶させる。このとき、車載情報収集装置30は、同一項目の情報について平均値、最頻値又は標準偏差等を求める統計処理を施したりしてもよい。
【0061】
車載記憶装置31は、稼働情報として、位置情報、傾斜計情報、時間情報、排土情報、積込情報、燃費情報、操作履歴情報及びイベント情報等を記憶している。車載記憶装置31が記憶しているこれらの稼働情報は例示であり、稼働情報はこれらに限定されるものではない。位置情報、傾斜計情報、排土情報、燃費情報、操作履歴情報及びイベント情報等は、これらが発生した(車載情報収集装置30が取得した)時間に対応付けて車載記憶装置31に記憶されている。車載情報収集装置30は、図2に示す情報収集装置10からの要求を示す指令信号を無線通信として受信し、車載無線通信装置27を介して、車載記憶装置31に記憶された稼働情報を情報収集装置10へ送信する。
【0062】
本実施形態において、車載情報収集装置30は、稼働情報に含まれる、ダンプトラック20が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報と、予め設定された指定経路の位置情報とに基づき、ダンプトラック20が走行した経路を特定することもできる。指定経路は、排土場DPと積込場LPとの間に予め設定され、管理側記憶装置13に登録された経路である。鉱山の管理者や運用者等によって、指定経路は設計される。この他に、指定経路は、天候の変化又は障害物の発生等の突発的な事象によって一時的に変更され、管理側記憶装置13に登録された経路も含む。ダンプトラック20は、車載記憶装置31に記憶された、ダンプトラック20の経路を特定するための処理を記述したコンピュータプログラム(経路特定用コンピュータプログラム)を読み込み、実行することによって、ダンプトラック20の経路を特定することができる。この場合、車載記憶装置31は、経路の特定時に車載無線通信装置27を介して指定経路の情報を管理側記憶装置13から取得してもよいし、予め指定経路の情報が車載記憶装置31に記憶されていてもよい。次に、本実施形態に係る鉱山機械の管理方法において、ダンプトラック20の経路を特定する処理(経路特定処理)の一例を説明する。
【0063】
<経路特定処理>
図5は、経路の模式図である。図6は、本実施形態に係る経路特定処理の手順を示すフローチャートである。図7から図9は、経路特定処理においてデータ数を圧縮する手順を示す図である。次の説明においては、管理装置10が無線通信によってダンプトラック20から取得した稼働情報を用いて、稼働情報が取得されたダンプトラック20が走行した経路を特定する例を説明する。
【0064】
本実施形態に係る経路特定処理は、ダンプトラック20の運搬作業の1サイクルにおいてダンプトラック20が走行する経路を特定する。運搬作業の1サイクルとは、ダンプトラック20が排土場(第1排土場)DP1で排土した後に空荷の状態で積込場LPに移動し、積込場LPで積荷が積み込まれた後、排土場(第2排土場)DP2に移動し、ここで積荷を排土するまでをいう。第1排土場DP1と第2排土場DP2とは異なる場所である場合もあるし、同じ場所である場合もある。
【0065】
本実施形態に係る経路特定処理を実行するにあたり、ステップS101において、図2に示す管理装置10が有する管理側処理装置12の走行経路特定部12aは、ダンプトラック20から取得した稼働情報からダンプトラック20の位置情報を取得する。位置情報は、上述のように位置情報検出装置29により取得されている。位置情報は、運搬作業の1サイクルにおいてダンプトラック20が移動した経路における複数の位置の座標が、それぞれの位置にダンプトラック20が存在した時間に対応付けられている。ステップS101においては、走行経路特定部12aは、位置情報と、これに対応付けられた時間との両方を取得する。
【0066】
次に、ステップS102において、走行経路特定部12aは、車載情報収集装置30が収集した複数の位置情報のデータ数を圧縮する。上述したように、位置情報は、緯度、経度及び高度の座標であり、緯度の座標をX、経度の座標をY、高度の座標をZとすると、位置Pの位置情報は、P(X、Y、Z)で表すことができる。ダンプトラック20が稼働をしているとき、車載情報収集装置30は、詳細に位置情報を収集しているため、元データの状態には多くの位置情報が含まれている。すなわち車載情報収集装置30は、何ら処理していない状態において、運搬作業の1サイクルに対する多くの位置情報を収集している。緯度をX軸、経度をY軸として例えば、運搬作業の1サイクルの位置情報を示すと、隣接する位置情報の間隔が小さくなる結果、図7に示すように、線状に表される。
【0067】
しかし、本実施形態に係る経路特定処理においては、元データほど詳細な位置情報(データ数)は不要である。また、本実施形態においては、排土場DPと積込場LPと両者の間における2箇所の位置情報に基づいて経路を特定するため、これらの位置がある程度の範囲で特定できればよいことから、詳細な位置情報は必要ない。さらに、詳細な位置情報に基づくと、経路を特定する際にはその分厳密な一致が必要になるため、特定が難しくなる。このため、位置情報が有する緯度及び経度の座標の数値を丸めることにより、運搬作業の1サイクルに含まれる複数の位置情報のうち、隣接する位置情報同士の間隔ΔRが大きくなる。その結果、経路の特定が容易になる。
【0068】
位置情報検出装置29により測位された、緯度及び経度の座標の数値の小数点以下が5桁である場合、隣接する位置情報同士の間隔ΔRが1m程度(図7参照)であるとする。この場合、緯度及び経度の座標の数値を小数点以4桁で丸めれば、図8に示すように、隣接する位置情報同士の間隔ΔRが10m程度になり、緯度及び経度の座標の数値を小数点以3桁で丸めれば、図9に示すように隣接する位置情報同士の間隔ΔRが100m程度になる。経路の特定には、隣接する位置情報同士の間隔ΔRが100m程度であれば十分である。本実施形態において、走行経路特定部12aは、運搬作業の1サイクルの経路に含まれる複数箇所の位置情報の数値を丸める。より具体的には、走行経路特定部12aは、運搬作業の1サイクルに含まれる位置情報の元データに対して、緯度及び経度の座標の数値を元データよりも小数点以下が小さい桁で丸める。このようにすることで、本実施形態に係る経路特定処理に適した精度の位置情報を得ることができる。上述した丸め処理により、経路の特定に用いる位置情報は、元データよりもデータ数が少なくなる(圧縮される)。
【0069】
ステップS102において、元データの位置情報が圧縮されたらステップS103に進み、走行経路特定部12aは、経路の特定において、例えば、管理側記憶装置13に記憶され、登録されている既存の経路と比較する対象の位置(比較対象位置)を特定する。次に、複数の位置情報のデータ数を圧縮する手法の変形例を説明する。
【0070】
<データ圧縮の変形例>
図10は、位置情報と走行距離等との関係を示す図表である。図11は、比較対象位置を特定する処理の手順を示すフローチャートである。図12は、比較対象位置を特定する処理を示す模式図である。車載情報収集装置30は、所定の時間間隔(サンプリングタイム)毎に、図4に示す位置情報検出装置29からダンプトラック20の位置を取得し、車載記憶装置31に位置情報として記憶させる。図10の時間は、車載情報収集装置30が位置情報を収集した時刻を示し、時間間隔は等しい。すなわち、時間間隔をΔtとすると、t2=t1+Δt、t3=t2+Δt、ti+1=ti+Δt(iは1以上n以下の整数)となる。
【0071】
本変形例において、車載情報収集装置30によって所定の時間間隔Δt毎に収集された運搬作業の1サイクルにおける複数の位置情報のデータ数を圧縮するにあたり、ステップS1021において、所定の位置を基準位置とする。例えば、図10に示す時間t1における位置を基準位置とする場合、位置P1(X1、Y1、Z1)が基準位置となり、時間tiにおける位置を基準位置とする場合、位置Pi(Xi、Yi、Zi)が基準位置となる。この例では、位置P1(X1、Y1、Z1)を基準位置とする。
【0072】
次に、ステップS1022において、走行経路特定部12aは、基準位置から次の位置P2(X2、Y2、Z2)までの距離L1を算出し、積算する。この場合、時間t1の間は、車速V1でダンプトラック20が走行しているので、次の位置P2(X2、Y2、Z2)までの距離L1は、時間t1における車速V1と時間間隔Δtとの積Δt×V1である。このときの積算走行距離は、Ls=L1である。
【0073】
次に、ステップS1023に進み、積算走行距離Lsが予め定めた所定の規定距離Lsc以上になっている場合は(ステップS1023、Yes)、ステップS1024に進む。本変形例に係る処理により、隣接する位置情報同士の間隔は、規定距離Lscと同程度になる。規定距離Lscの大きさによってデータ数の圧縮の程度が決定されるので、規定距離Lscは、本実施形態に係る経路特定処理に適した精度の位置情報を得ることができる程度に設定される。本変形例では、規定距離Lscは、100m程度である。
【0074】
積算走行距離Lsが規定距離Lscに満たない場合(ステップS1023、No)、ステップS1022に戻り、走行経路特定部12aは、前回の位置P2(X2、Y2、Z2)からその次の位置P3(X3、Y3、Z3)までの距離L2を算出し、積算する。積算走行距離Lsは、L1+L2になる。距離L2は車速V2と時間間隔Δtとの積Δt×V2である。
【0075】
積算走行距離LsがL1+L2+L3のときに規定距離Lsc以上になったとする。この場合、ステップS1024において、走行経路特定部12aは、基準位置から条件が成立(Ls≧Lsc)したときの位置(この例ではP3)までに含まれるそれぞれの位置の座標を平均する。この場合は、位置P1(X1、Y1、Z1)、位置P2(X2、Y2、Z2)、位置P3(X3、Y3、Z3)が含まれるので、これらのそれぞれの座標を平均する。それぞれの座標の平均値を有する位置Pm(Xm、Ym、Zm)が、規定距離Lsc内の平均位置になる(図12参照)。
【0076】
次に、ステップS1025に進み、現在の位置が、運搬作業の1サイクルにおけるダンプトラック20の最後の位置PEである場合(ステップS1025、Yes)、本変形例に係るデータ圧縮が終了する。現在の位置が、運搬作業の1サイクルにおけるダンプトラック20の最後の位置ではない場合(ステップS1025、No)、ステップS1026に進む。ステップS1026において、走行経路特定部12aは、条件が成立(Ls≧Lsc)したときにおける位置(この例では位置P3)の次の位置(この例では位置P4)を、基準位置とする。そして、ステップS1022に戻って以降の手順を繰り返す。
【0077】
本変形例は、運搬作業の1サイクルにおける移動距離を規定距離Lsc毎に分割し、規定距離Lscに含まれる複数の位置の座標を平均した位置で前記複数の位置を代表させる。このような手法によっても、複数の位置情報のデータ数を圧縮することができる。複数の位置情報のデータ数を圧縮する手法は上述した2つに限定されるものではなく、他の手法を用いてもよい。次に、ダンプトラック20が走行する経路のパターンを説明する。
【0078】
図13は、ダンプトラック20が走行する経路のパターンを示す模式図である。以下においては、排土場から積込場に向かうときを往路、積込場から排土場に向かうときを復路という。この例において、排土場DPa、DPbはそれぞれが異なり、積込場LPa、LPbはそれぞれが異なる。第1のパターンとして、ダンプトラック20が、排土場DPaと積込場LPaとの間で往路も復路も同一の経路Rsを走行して往復する場合がある。第2のパターンとして、ダンプトラック20が、排土場DPaと積込場LPaとの間で往復するが、往路と復路とが異なる場合がある。この場合、往路は経路Ra、復路は経路Rsとなる。
【0079】
第3のパターンとして、積込場LPaは第1のパターンと同じであるが、第1のパターンが排土場DPaに排土するのに対し、排土場DPbに排土する場合がある。この場合、ダンプトラック20は、同一の経路Rbを往復する。第4のパターンとして、排土場DPaは第1のパターンと同じであるが、第1のパターンが積込場LPaで積載するのに対し、積込場LPbで積載する場合がある。この場合ダンプトラック20は、同一の経路Rcを往復する。
【0080】
さらに、第5のパターンとして、積込場LPaが同じであるが、ダンプトラック20は、異なる排土場Dpa、Dpbと積込場LPaとの間を移動する場合がある。この場合、往路は経路Rs、復路は経路Rbとなる。また、第6のパターンとして、排土場DPaが同じであるが、ダンプトラック20は、異なる積込場Lpa、Lpbと排土場DPaとの間を移動する場合がある。この場合、ダンプトラック20は、経路Rs、Rcをそれぞれ往復する。第5のパターン及び第6のパターンは、経路の切り替え時等に発生するが、希にしか発生しないので、通常は経路の特定から除外してもよい。
【0081】
第1のパターンは、複数の運搬作業の1サイクルを比較した場合、排土場DPaの位置情報と、積込場LPaの位置情報と、排土場DPaと積込場LPaとの中間位置MP1、MP2の位置情報とが一致、すなわちこれらの緯度、経度及び高度のデータが一致する場合に、同じ経路であると特定される。中間位置MP1、MP2は、排土場DPaと積込場LPaとの間にあればよく、必ずしも両者からの距離が同一の位置を意味するものではない(以下同様)。第2のパターンは、複数の運搬作業の1サイクルを比較した場合、排土場DPaの位置情報と、積込場LPaの位置情報と、経路Rsの中間位置MP1(又はMP2)の位置情報と、経路Raの中間位置MPa1の位置情報とが一致、すなわちこれらの緯度、経度及び高度のデータが一致する場合に、同じ経路であると特定される。
【0082】
第3のパターンは、複数の運搬作業の1サイクルを比較した場合、排土場DPbの位置情報と、積込場LPaの位置情報と、両者の中間位置MPb1、MPb2の位置情報とが一致、すなわちこれらの緯度、経度及び高度のデータが一致する場合に、同じ経路であると特定される。第4のパターンは、複数の運搬作業の1サイクルを比較した場合、排土場DPaの位置情報と、積込場LPbの位置情報と、両者の中間位置MPc1、MPc2の位置情報とが一致、すなわちこれらの緯度、経度及び高度のデータが一致する場合に、同じ経路であると特定される。
【0083】
第5のパターンは、複数の運搬作業の1サイクル同士を比較した場合、排土場DPaの位置情報と、積込場LPaの位置情報と、排土場DPbの位置情報と、経路Rsの中間位置MP1(又はMP2)の位置情報と、経路Rbの中間位置MPb2(又はMPb1)の位置情報とが一致、すなわちこれらの緯度、経度及び高度のデータが一致する場合に、同じ経路であると特定される。第6のパターンは、複数の運搬作業の1サイクルを比較した場合、排土場DPaの位置情報と、積込場LPaの位置情報と、積込場LPbの位置情報と、経路Rsの中間位置MP1(又はMP2)の位置情報と、経路Rcの中間位置MPc1(又はMPc2)の位置情報とが一致、すなわちこれらの緯度、経度及び高度が一致する場合に、同じ経路であると特定される。
【0084】
第1のパターンから第4のパターン、すなわち、排土場と積込場とがそれぞれ一箇所ずつである場合には、ダンプトラック20が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる4箇所の位置情報に基づき、ダンプトラック20が走行した経路が特定される。第5のパターン及び第6のパターンは、すなわち、排土場と積込場とのいずれかが2箇所である場合には、ダンプトラック20が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる5箇所の位置情報に基づき、ダンプトラック20が走行した経路が特定される。
【0085】
ステップS102でデータの圧縮が終了したら、ステップS103に進み、走行経路特定部12aは、比較対象位置を抽出する。比較対象位置とは、排土場及び積込場を含み、かつダンプトラックが排土場から積込場に移動し、再び排土場に移動するまでの経路に含まれる少なくとも4箇所の位置である。上述した第1のパターンである場合、走行経路特定部12aは、排土場DPaの位置と、積込場LPaの位置と、両者の中間位置MP1、MP2の位置とを、比較対象位置として、ステップS102で求めた、経路の特定に用いる位置情報から取得する。そして、走行経路特定部12aは、ステップS102において、経路を特定しようとする対象を定めるのである。また、走行経路特定部12aは、管理側記憶装置13の経路リスト14Rに登録されている既存の経路を読み出し、それぞれの比較対象位置を抽出する。
【0086】
経路を特定しようとする対象及び比較する既存の経路が、上述した第1〜第6のパターンのうち、どのパターンに該当するかは、排土場及び積込場の数並びに両者の中間の位置に基づいて走行経路特定部12aが特定する。登録されている既存の経路については、予め第1〜第6のパターンを識別できるIDを付して管理側記憶装置13に登録してもよい。
【0087】
経路を特定しようとする対象及び比較する既存の経路について、それぞれ比較対象位置が抽出されたら、走行経路特定部12aは、両者の比較対象位置を比較する。その結果、積込場が一致し(ステップS104、Yes)、排土場が一致し(ステップS105、Yes)、両者の途中の位置(本実施形態では両者の中間位置)が往路と復路とで一致する(ステップS106、Yes)場合、走行経路特定部12aは、経路を特定しようとする対象が、比較する既存の経路と同じ経路であるとする(ステップS107)。
【0088】
積込場と排土場との途中の位置(上述した、2箇所の位置情報又は中間位置と説明した位置)は、例えば、車載情報収集装置30が収集した複数の位置情報のデータ数を圧縮した後におけるデータ数のメジアン値に相当する位置とすることができる。例えば、圧縮後における積込場と排土場との間に存在するデータ数(位置情報の数)が11個であった場合、積込場及び排土場からそれぞれ6番目のデータに対応する位置が、前記「途中の位置」となる。この他にも、積込場又は排土場から数えて所定数のデータ(位置情報の数)に対応する位置を、前記「途中の位置」としてもよい。
【0089】
積込場の不一致、排土場の不一致、両者の途中の位置が往路又は復路のいずれかで不一致である場合(ステップS104、ステップS105、ステップS106のいずれかでNo)、走行経路特定部12aは、経路を特定しようとする対象が、比較する既存の経路と同じ経路とは異なる経路であるとする(ステップS108)。このようにして、管理装置10は、ダンプトラック20による運搬作業の1サイクルにおいてダンプトラック20が走行した未知の経路を区別して特定する。本実施形態によれば、ダンプトラック20の運搬作業の1サイクルにおける経路を特定できるので、生産性向上のための走路設計評価又は運転者の運転指導等において、ダンプトラック20が走行した経路毎の解析が可能になるとともに、その解析結果も妥当なものとなる。次に、経路特定処理の後処理を説明する。
【0090】
<経路特定処理の後処理>
図14は、経路特定処理の後処理の手順を示すフローチャートである。ステップS201において、管理装置10の走行経路特定部12aは上述した経路の特定処理を実行する。次に、ステップS202において、登録されている既存の経路の中から経路が特定できないと判断される場合は、その経路はまだ経路リスト14Rに登録されていない、すなわち未登録である(ステップS202、Yes)。この場合、ステップS203に進み、図2に示す管理側処理装置12の勾配解析部12bは、経路解析を実行する。経路解析は、経路の勾配毎に複数のセクションに分割して、勾配の情報を経路の情報に付与する処理である。経路解析については後述する。経路解析が終了したら、ステップS204に進み、勾配解析部12bは、その結果を経路情報として経路リスト14Rに登録(保存)する。ステップS202において、登録されている既存の経路の中から経路が特定できたと判断される場合、その経路は既に経路リスト14Rに登録済なので、ステップS203及びステップS204は実行せず、後処理を終了する。次に、経路解析について説明する。
【0091】
<経路解析>
図15、図16は、経路解析の手順を示すフローチャートである。図17から図19は、経路解析の説明図である。特定された経路を、勾配に応じて区分けしておくことは、ダンプトラック20から収集した稼働情報を解析する際に重要な情報になる。例えば、特定された経路の登りの区間における平均車速を求めることがある。経路解析は、一定距離の区間の平均傾斜角を求めてテンポラリセクションとし、このテンポラリセクションを元に、特定された経路を勾配に応じて複数のセクションに区分けするものである。
【0092】
経路解析を実行するにあたり、まず、一定距離の区間の平均傾斜角からテンポラリセクションを求める。勾配解析部12bは、管理側記憶装置13の経路リスト14Rから経路解析を実行する経路の情報(経路情報)を読み出す。この経路情報は、車載情報収集装置30が収集し、圧縮がされていない元データである。ステップS301において、勾配解析部12bは、読み出した経路情報のうち、所定の位置を基準点とする。本実施形態では、図17に示す位置Pbを基準位置としている。なお、経路解析の開始時においては、最初の位置SPを所定の位置とすることが好ましい。
【0093】
ステップS302に進み、所定の位置が最後の位置EPでないと判断される場合(ステップS302、No)、ステップS303に進む。ステップS303において、所定の位置が分岐・交差点位置でないと判断される場合(ステップS303、No)、ステップS304に進む。ステップS304において、勾配解析部12bは、次の位置を一定距離の区間を特定するための対象とする。この例では、図17に示す位置PN1が前記「次の位置」となる。ステップS305に進み、次の位置PN1が基準位置Pbから規定距離ΔL(例えば、20m〜100m程度)以上離れていないと判断される場合(ステップS305、No)、勾配解析部12bは、ステップS302に戻り、以降の手順を実行する。
【0094】
勾配解析部12bがステップS302からステップS305を繰り返した結果、位置PN4で、基準位置Pbから規定距離ΔL以上離れたとする(ステップS305、Yes)。この場合、ステップS306に進み、基準位置Pbから現在の位置PN4までの傾斜角を平均する。傾斜角の情報は、車載情報収集装置30が位置情報を取得するタイミングで傾斜センサ39から取得している。この傾斜角の情報は、管理側記憶装置13が記憶している経路リスト14Rの経路の位置情報に対応付けて記述されている。このため、勾配解析部12bは、管理側記憶装置13の経路リスト14Rから経路解析の対象となっている経路の情報から、傾斜角の情報を取得することができる。
【0095】
次に、ステップS307に進み、勾配解析部12bは、規定距離ΔLの区間に、ステップS306で求めた傾斜角の平均値を付加する。そして、勾配解析部12bは、基準位置Pb及び位置PN1、PN2、PN3、PN4を含む規定距離ΔLの区間を1つのテンポラリセクションとする。その後、ステップS308に進み、勾配解析部12bは、テンポラリセクションの次の位置を基準位置とした後ステップS302に戻り、一定距離の区間を特定するための対象の位置が最後の位置EPになるまでステップS302からステップS308を繰り返す。
【0096】
次に、ステップS303に戻って説明する。ステップS303において、所定の位置が分岐・交差点位置であると判断される場合(ステップS303、Yes)、ステップS306に進み、勾配解析部12bは、基準位置Pbから分岐・交差点位置までの傾斜角を平均する。その後、ステップS307に進み、勾配解析部12bは、基準位置Pbから分岐・交差点位置までの区間に、ステップS306で求めた傾斜角の平均値を付加する。そして、勾配解析部12bは、基準位置Pbから分岐・交差点位置までの位置情報を含む区間を1つのテンポラリセクションとする。その後、ステップS308に進み、勾配解析部12bは、テンポラリセクションの次の位置を基準位置とした後、一定距離の区間を特定するための対象の位置が最後の位置EPになるまでステップS302からステップS308を繰り返す。
【0097】
交差点及び分岐点の位置情報は、予め他の手段(ハンディGPS装置、測量又は走路設計図からの読み取り)から得られた位置情報を管理装置10に入力することで用意されている。あるいは、経路リスト14Rに記述されている情報から勾配解析部12bが交差点及び分岐点の位置情報を自動で検出する。交差点又は分岐点は、勾配解析部12bが、鉱山のすべての経路を重ね合わせたときにおける線の交わりを検出することで自動的に検出することができる。線の交わりは、勾配解析部12bが複数の経路を比較することによって重なる部分(近傍点)をサーチし、端点を探せば、そこが分岐点又は交差点になるので、これらを自動的に検出することができる。
【0098】
次に、ステップS302に戻って説明する。所定の位置が図17に示す最後の位置EPである場合には(ステップS302、Yes)、ステップS309に進み、勾配解析部12bは、基準位置から現在の最後の位置EPまでの傾斜角を平均する。次に、ステップS310に進み、勾配解析部12bは、規定距離ΔLの区間に、ステップS309で求めた傾斜角の平均値を付加する。そして、勾配解析部12bは、基準位置から最後の位置EPまでの位置情報を含む区間を1つのテンポラリセクションとする。上述した処理により、特定された経路は、図18に示すように、St1〜St6で示す6個のテンポラリセクションに区分される。
【0099】
次に、テンポラリセクションSt1〜St6を元に、特定された経路を複数のセクションに区分する。ステップS401において、勾配解析部12bは、所定のテンポラリセクションを基準とする。処理の開始においては、最初のテンポラリセクションSt1を基準とする。次に、ステップS402において、基準が、特定された経路における最後のテンポラリセクションでない場合(ステップS402、No)、ステップS403に進む。
【0100】
ステップS403において、現在のテンポラリセクションが基準と同じ傾斜角のレベルであれば(ステップS403、Yes)、ステップS404に進む。テンポラリセクションSt1を基準とした場合、ステップS403においては、基準がテンポラリセクションSt1なので、傾斜角は同じ大きさとなる。ステップS404において、勾配解析部12bは、次のテンポラリセクションを新たなテンポラリセクションとする。ステップS404が最初に実行される場合、テンポラリセクションSt2が次のテンポラリセクションとなる。その後、ステップS402に戻って、勾配解析部12bは、以降の手順を実行する。その結果、ステップS403が2回目以降である場合、ステップS403においては、基準以外のテンポラリセクションが比較されることになる。例えば、ステップS403が2回目であれば、図18に示すテンポラリセクションSt2と基準(ステップS401で基準としたテンポラリセクションSt1)とが比較される。
【0101】
ステップS403において、現在のテンポラリセクションが基準と同じ傾斜角のレベルでない場合(ステップS403、No)、ステップS405に進む。ステップS405において、勾配解析部12bは、基準から現在の1つ前のテンポラリセクションまでを1つのセクションとする。例えば、図18に示す例では、テンポラリセクションSt2がテンポラリセクション(基準)St1と異なる傾斜角レベルであったため(ステップS403、No)、テンポラリセクションSt1が1つのセクションS1となっている。
【0102】
次に、ステップS406に進み、勾配解析部12bは、現在のテンポラリセクションを基準とした後、ステップS402に戻って以降の手順を実行する。図18に示す例では、現在のテンポラリセクションがテンポラリセクションSt2なので、ステップS406においては、テンポラリセクションSt2が基準となり、ステップS402以降の手順が実行される。次に、ステップS402に戻って説明する。
【0103】
ステップS402において、基準が、特定された経路における最後のテンポラリセクションである場合(ステップS402、Yes)、ステップS407に進む。図18に示す例では、テンポラリセクションSt6が最後のテンポラリセクションとなる。ステップS407において、勾配解析部12bは、基準から最後のテンポラリセクションまでを1つのセクションとして、経路解析が終了する。経路解析により、特定された経路は、同程度の勾配の複数のセクションに区分される。図18、図19に示す例では、排土場DP1から積込場LPを経由して排土場DP2に至る経路が、4個のセクションS1からS4に区分されている。この例において、セクションS1の傾斜角SLは0.5°(ほぼ平地)、セクションS2の傾斜角SLは5°(上り)、セクションS3の傾斜角SLは−4°(下り)、セクションS4の傾斜角SLは−0.1°(ほぼ平地)である。
【0104】
勾配解析部12bは、経路解析の結果、すなわち、セクション毎の勾配(傾斜角)を、特定された経路の位置情報と対応付けて経路リスト14Rに記述して、管理側記憶装置13に記憶させる。また、勾配解析部12bは、経路解析の結果をセクション毎に色分けをして、図2に示す表示装置16に表示したり、出力装置19から出力したりしてもよい。このように、特定された経路の勾配を細かく区分するのではなく、ある程度の範囲で区分することにより、表示装置16に表示したり出力装置19から出力した場合、経路の勾配状態を理解しやすくなる。次に、経路を特定する処理(経路特定処理)の変形例を説明する。
【0105】
(経路特定処理の第1変形例)
上述した例では、車載情報収集装置30が収集したダンプトラック20の運搬作業の1サイクルにおける稼働情報(主として位置情報)を用いて、管理装置10が運搬作業の1サイクルにおける経路を特定した。第1変形例においては、図4に示す車載情報収集装置30が運搬作業の1サイクルにおける経路を特定する。この場合、車載情報収集装置30は、車載無線通信装置27を介して、図2に示す管理装置10の管理側記憶装置13の経路リスト14Rから登録済の経路を取得する。そして、車載情報収集装置30は、取得した登録済の経路及び運搬作業の1サイクルにおける稼働情報を用いて、上述した経路を特定する処理(経路特定処理)を実行することにより、運搬作業の1サイクルにおける経路を特定する。このように、管理装置10のみならず、車載情報収集装置30もダンプトラック20が運搬作業の1サイクルにおいて走行した経路を特定することができる。
【0106】
(経路特定処理の第2変形例)
図20は、経路特定処理の第2変形例を説明するための図である。図21は、領域IDと位置情報等との関係を示す図表である。本変形例は、ダンプトラック20が走行する経路Rg、Rrに、経路の所定領域を識別するための識別体50a〜50gを設け、これをダンプトラック20が有する読み取り装置51で読み取ることにより、経路を特定するものである。
【0107】
経路Rg、Rrは、複数のセクションSa〜Sgに区分されている。それぞれのセクションSa〜Sgには、これらを識別するための指標としての領域IDの情報を少なくとも有する識別体50a〜50gが設置されている。識別体50a〜50gは、ダンプトラック20の車輪23により踏まれたりすることのない、経路の路側に設置されるのが好ましい。識別体50a〜50gは、例えば、RFID(無線ICタグ)である。ダンプトラック20は、経路Rg、Rrを走行しながら読み取り装置51で識別体50a〜50gの領域IDを読み取る。そして、車載情報収集装置30は、読み取った領域IDを、例えば、図21に示すように、読み取った時点における時間、位置情報、車速及び燃費等といった稼働情報に対応付けて車載記憶装置31に記憶する。領域IDは、鉱山における複数の経路に対応付けて付与してあるので、領域IDによってダンプトラック20が運搬作業の1サイクルにおいて走行した経路を特定することができる。
【0108】
識別体50a〜50gは、RFIDに限定されるものではない。例えば、反射板を経路Rg、RrのそれぞれのセクションSaからSgに設置する。そして、ダンプトラック20に読み取り装置51として反射式レーダ(物体検知手段)を搭載し、前記反射板を検知しながら走行することでダンプトラック20が走行している経路を特定してもよい。
【0109】
また、ダンプトラック20の運転者が、ダンプトラック20が運搬作業の1サイクルにおいて走行する経路を車載情報収集装置30に入力してもよい。この場合、運転者は、例えば、ダンプトラック20が走行する経路が変わる毎に、ダンプトラック20の運転室内に設けられた入力装置等で経路を選択(指示)する。その選択(指示)の情報は、車載情報収集装置30が、入力された時点における時間、位置情報、車速及び燃費等といった稼働情報に対応付けられて車載記憶装置31に記憶する。さらに、車載情報収集装置30は、燃費データ、積載量データ等を選択(指示)された経路にひも付けて付加する。このようにしても、ダンプトラック20が運搬作業の1サイクルにおいて走行した経路を特定することができる。次に、本実施形態に係る鉱山機械の管理方法において、特定された経路を利用して稼働情報を解析する例を説明する。
【0110】
<特定された経路を利用した稼働情報の解析例1>
図22は、稼働情報を解析して路面整備提案を作成する例を示すフローチャートである。図23は、稼働情報の解析の説明に用いる図である。この例は、上述のような経路特定処理によって特定された経路のうち、同じ経路を走行したダンプトラック20の稼働情報から、ダンプトラック20が走行する経路の路面の状態を解析し、必要に応じて路面を整備する提案を作成するものである。鉱山の管理者又は運用者は、路面整備の提案を受けて鉱山の経路等の路面の整備の手配及び実行を行うことができる。鉱山は、ダンプトラック20の走行又は降雨等によって路面が荒れて凹凸が発生する。路面の凹凸がひどくなると、ダンプトラック20の運転者にとっては疲労の原因になる。また、ダンプトラック20にとっても凹凸を走行する際に発生する衝撃等が車体等への負荷となり、損傷の原因となる。さらに、路面凹凸がある場所では、車輪23のタイヤのスリップを引き起こし、タイヤの早期摩耗を引き起こす要因にもなる。また、路面凹凸のある場所で、スリップ発生又は減速走行を強いられたりするから、燃費の悪化にもつながる。したがって、路面凹凸が発生したならば、速やかに検知し整備することで、鉱山の生産性の維持向上を図ることができる。例えば、ダンプトラック20の1台あたりにおける路面凹凸イベント(路面の凹凸に関する路面情報に相当する)の発生頻度Q(回/1サイクル)を所定の期間(例えば1日)毎に集計し、特定の閾値Qt以上に増加した場合には、路面の整備に関する指標として、路面の整備を提案する路面整備提案が作成される。
【0111】
路面の状態を解析するにあたり、ステップS501において、図2に示す管理装置10が有する管理側処理装置12の路面状態解析部12cは、判別した経路を走行したダンプトラック20の稼働情報を抽出する。次に、ステップS502において、路面状態解析部12cは、特定の経路、すなわち同一の経路を走行した複数のダンプトラック20の稼働情報から、路面凹凸イベントの発生頻度Qのデータを抽出する。路面凹凸イベントは、所定値よりも大きい凹凸をダンプトラック20が検知したときにカウントされる。凹凸は、例えば、加速度センサを搭載し、加速度センサが検知した過度な加速度変化を示す信号、サスペンションシリンダー24のストロークの過度な変動等から検知される。また、圧力センサ26の検出信号の過度な変動から路面の凹凸を検知してもよい。さらに、レーダー等の光学式物体検出装置を搭載して路面にレーザを照射し、路面の凹凸を検出しながら走行し、レーザの反射光の変化によって凹凸を検出してもよい。発生頻度Qは、ダンプトラック20の搬送作業の1サイクルあたりに凹凸イベントが発生した回数である。路面凹凸イベントの情報は、その路面凹凸イベントの発生時の位置情報検出装置29により測位された位置情報と関連付けて車載記憶装置31に記憶される。
【0112】
ステップS503において、少なくとも2台以上のダンプトラック20のQ値が所定の閾値Qt未満であると判断される場合(ステップS503、No)、路面状態解析部12cは、ステップS501に戻り、以降の手順を実行する。少なくとも2台以上のダンプトラック20のQ値が所定の閾値Qt以上であると判断される場合(ステップS503、Yes)、ステップS504に進む。ステップS504において、各ダンプトラック20の路面凹凸イベントの発生場所(位置情報)が、図23に示す所定範囲LA(50m〜100m程度)内にないと判断される場合(ステップS504、No)、路面状態解析部12cは、ステップS501に戻り、以降の手順を実行する。各ダンプトラック20の路面凹凸イベントの発生場所が、所定範囲LA内にあると判断される場合(ステップS504、Yes)、ステップS505に進む。
【0113】
図23に示すように、複数のダンプトラック20A、20Bが同じ経路を走行する限りは、各ダンプトラック20A、20Bは同じ場所で路面凹凸イベントを発する可能性が高い。しかし、走行速度又はサスペンションシリンダー24の動作によっては、検出される路面凹凸イベントが示す発生場所がそれぞれの各ダンプトラック20A、20Bでばらつくことが予想される。例えば、ダンプトラック20Aが路面凹凸イベントを検出した位置と、ダンプトラック20Bが路面凹凸イベントを検出した位置との相対位置が異なることがある。したがって、複数のダンプトラック20A、20B間において路面凹凸イベントが検出された箇所が所定範囲LA内にあれば、ステップS504により同じ箇所の路面凹凸イベント(同じ個所に整備すべき路面凹凸が存在する)とみなす。
【0114】
ステップS505において、路面状態解析部12cは、路面凹凸イベントの発生箇所の発生時間に基づき、路面凹凸イベントが発生した経路及びその位置を抽出する。そして、路面状態解析部12cは、凹凸イベントが発生した経路の路面の整備に関する指標として、路面整備提案を作成する。この例では、路面凹凸イベントを検出した複数のダンプトラック20A、20Bの前後における所定範囲RRA、RRB、RRCの路面の整備が必要であるとする。
【0115】
その後、ステップS506に進み、路面状態解析部12cは、作成した路面整備提案に基づき、路面の整備が必要な経路及び路面整備が必要な箇所をレポートにグラフィック及び文字で出力する。このように、本解析例は、同じ経路を走行したダンプトラック20同士を比較することにより、路面の整備が必要な箇所を抽出する精度を向上させることができるので、鉱山の管理者又は運用者に適切な路面整備の提案をすることができる。
【0116】
<特定された経路を利用した稼働情報の解析例2>
図24は、稼働情報を解析して燃費改善提案又は渋滞改善提案を作成する例を示すフローチャートである。この例は、特定された経路のうち、同じ経路を走行したダンプトラック20の稼働情報から、ダンプトラック20の燃料消費及び経路の渋滞を解析し、必要に応じて燃費を改善する提案又は渋滞発生箇所におけるダンプトラックの走行速度を改善する提案を作成するものである。鉱山の管理者、運用者又は運転者は、燃費を改善する提案又は渋滞発生箇所におけるダンプトラック20の走行速度を改善する提案を受けて鉱山の経路等の設計変更や運行規則の改善、運転者の運転指導等を行うことができる。渋滞の発生は、ダンプトラック20の燃費を悪化し、ブレーキの消耗やタイヤの摩耗を促進させるとともに衝突等の安全面でも避けるべきであり、鉱山の生産性を低下させる要因となる。この例において、燃費とは、所定の距離を走行するのに必要な燃料の量をいう。
【0117】
ダンプトラック20の燃料消費等を解析するにあたり、ステップS601において、図2に示す管理装置10が有する管理側処理装置12の燃費解析部12dは、判別した経路を走行したダンプトラック20の稼働情報を抽出する。次に、ステップS602において、燃費解析部12dは、特定の経路、すなわち同一の経路を走行した複数のダンプトラック20の稼働情報から、走行中の燃料消費に関する燃費情報を抽出する。燃費情報は、少なくとも瞬間燃費を有している。燃費解析部12dは、瞬間燃費に基づいて、所定期間中の平均燃費を求めることができるので、走行中における平均燃費Faveを求めることができる。
【0118】
次に、ステップS603において、停車中を除く各ダンプトラック20の走行時における平均燃費Faveが所定の閾値Ft以上であると判断される場合(ステップS603、Yes)、ステップS604に進む。ステップS604において、燃費解析部12dは、平均燃費Faveが所定の閾値以上とされたダンプトラック20を運転した運転者IDを抽出する。運転者IDは、図4に示す運転者ID取得装置38から抽出することができる。
【0119】
次に、ステップS605において、燃費解析部12dは、平均燃費Faveが所定の閾値以上とされたダンプトラック20又は運転者に対応した、燃料消費に関する指標としての燃費改善提案を作成する。そして、ステップS606において、作成した燃費改善提案に基づき、ダンプトラック20の番号又は運転者IDをレポートにグラフィック及び文字で出力する。このように、本解析例は、同じ経路を走行したダンプトラック20同士を比較することにより、燃費の改善が必要なダンプトラック20又は運転者を抽出する精度を向上させることができるので、鉱山の管理者、運用者又は当該運転者に適切な燃費改善の提案を行うことができる。
【0120】
次に、ステップS603に戻って説明する。停車中を除く各ダンプトラック20の走行時における平均燃費Faveが所定の閾値Ft未満である場合(ステップS603、No)、ステップS607に進む。ステップS607において、図2に示す管理装置10が有する管理側処理装置12の渋滞解析部12eは、各ダンプトラック20の運搬作業の1サイクルあたりにおける停車時間比率Srを求める。停車時間比率Srは、1サイクルあたりにおけるダンプトラック20の停車時間の合計を、1サイクルあたりにおける走行時間の合計で除したものである。
【0121】
ステップS608に進み、運搬作業の1サイクルあたりにおける停車時間比率Srが所定の閾値Stを超え、かつ増加傾向にあったダンプトラック20が2台未満であると判断される場合(ステップS608、No)、稼働情報の解析は終了する。運搬作業の1サイクルあたりにおける停車時間比率Srが所定の閾値Stを超え、かつ増加傾向にあったダンプトラック20が、少なくとも2台以上あると判断される場合(ステップS608、Yes)、ステップS609に進む。ステップS609において、渋滞解析部12eは、1サイクルあたりにおける停車時間比率Srが、所定の閾値Stを超え、かつ増加傾向にあったダンプトラック20の長時間停車(所定時間以上の停車)イベントとその停車位置データ(位置情報)を抽出する。長時間停車イベントとは、回転センサ25等の車速を検出するセンサ等が、停車を示す信号を出力した後、タイマーIC等によって経過時間を計時し、所定時間以上の停車が継続したと判断したならば生成される、長時間停車イベントを示す情報である。
【0122】
次に、ステップS610において、図23に示す各ダンプトラック20A、20Bの長時間停止イベントが発生した停車位置が、所定範囲LB(30m〜50m程度)の範囲内にない場合(ステップS610、No)、稼働情報の解析は終了する。各ダンプトラック20A、20Bの長時間停止イベントが発生した停車位置が、所定範囲LB(30m〜50m程度)の範囲内にある場合(ステップS610、Yes)、ステップS611に進む。ステップS611において、渋滞解析部12eは、ダンプトラック20の停車位置を渋滞発生個所として、経路の位置情報と対応付けて渋滞発生改善提案を作成する。また、渋滞解析部12eは、ダンプトラック20の走行速度の改善に関する指標(走行速度改善提案)を作成する。
【0123】
例えば、図23に示す例において、ダンプトラック20Bは一日の中で最も先に長時間停止イベントを発したとする。この場合、渋滞解析部12eは、ダンプトラック20Bが長時間停止した位置の後方における所定範囲RRA、RRBの走行速度の制限をより低くすることを示す情報を、走行速度改善提案に織り込む。このようにすることで、ダンプトラック20の制動及び発進の回数を低減させて、渋滞の発生を抑制するとともに燃費の低減、ブレーキの消耗抑制、タイヤの摩耗抑制又は安全の確保等を図ることができ、鉱山の生産性の維持向上に努めることができる。
【0124】
次に、ステップS612において、渋滞解析部12eは、作成した渋滞発生改善提案に基づき、渋滞発生箇所及び走行速度改善提案を、レポートにグラフィック及び文字で出力する。このように、本解析例は、同じ経路を走行したダンプトラック20同士を比較することにより、渋滞の改善が必要な箇所の情報及びダンプトラック20の走行速度を改善する情報の精度を向上させることができるので、適切な渋滞発生改善の指標を提供することができる。その結果、渋滞の発生頻度を低下させることができるので、鉱山の生産性低下を最小限に抑えることができる。鉱山の管理者又は運用者は、走行速度の制限に係る運行規則を改善したり運転者に走行速度の制限に係る注意を促すことができる。
【0125】
<特定された経路を利用した稼働情報の解析例3>
図25は、稼働情報を解析して経路変更提案、運転者疲労確認提案又は点検提案を作成する例を示すフローチャートである。この例は、上述した解析例2において渋滞発生改善提案及び走行速度改善提案を作成した経路のうち、同じ経路を走行したダンプトラック20の稼働情報から、必要に応じて経路変更指標としての経路変更提案、疲労確認指標としての運転者疲労確認提案又はダンプトラック20の点検に関する指標としての点検提案を作成するものである。次に、稼働情報の解析例3の手順を説明する。
【0126】
ステップS701において、図2に示す管理装置10が有する管理側処理装置12の走行経路解析部12fは、渋滞発生改善提案及び走行速度改善提案を作成した経路を抽出する。これらが作成されると、対応する経路の情報には、これらが作成された履歴が付されるので、走行経路解析部12fは、前記履歴によって渋滞発生改善提案及び走行速度改善提案を作成した経路を抽出することができる。
【0127】
ステップS702進み、抽出した経路において、所定期間内に長時間停止イベントが発生したダンプトラック20が2台未満であると判断される場合(ステップS702、No)、稼働情報の解析は終了する。所定期間内に長時間停止イベントが発生したダンプトラック20が少なくとも2台以上であると判断される場合(ステップS702、Yes)、ステップS703に進む。ステップS703において、長時間停止イベントが発生した各ダンプトラック20に、エラーイベント(異常の発生)がないと判断される場合(ステップS703、No)、ステップS704に進む。エラーイベントは、ダンプトラック20の異常に関する異常情報に相当する。エラーイベントは、車載情報収集装置30がダンプトラック20の各所に取り付けられたセンサ類から送信される信号を取得して異常の有無を判別し、異常が発生していると判定した場合に生成される情報であったり、あるいはセンサ類自身が異常を検知した時に異常を示す信号を車載情報収集装置30が取得することで生成される情報である。ダンプトラック20の異常には、例えばエンジン34Gのエンジン水温の異常(過昇温状態)及びバッテリの異常(電圧や充電回路の異常)等がある。
【0128】
ステップS704において、長時間停止イベントが発生した各ダンプトラック20の停車位置は、所定範囲LB(図23参照)内であると判断される場合(ステップS704、Yes)、ステップS705に進む。ステップS705において、走行経路解析部12fは、ステップS701で抽出した経路に対して、経路変更指標としての経路設計変更提案を作成する。すなわち、渋滞の改善を図るための走行速度の改善提案を行い、かつ、ダンプトラック20に異常が発生していないにも関わらず長時間停止があったということは、ダンプトラック20が走行する経路の設計に改善の余地あると判断できるからである。
【0129】
次に、ステップS706に進み、走行経路解析部12fは、経路設計変更提案に基づき、経路を識別するための経路識別ID及び経路識別IDに対応する経路の図面をグラフィック及び文字で出力する。このように、本解析例は、以前に走行速度改善提案を作成した経路と同じ経路を走行したダンプトラック20同士について、所定時間以上の停止に関する長時間停止情報に基づき、経路の長さ、ルート並びに交差点及び分岐点の配置位置といった経路の設計について設計変更が必要な経路を抽出する。このため、本解析例は、設計変更が必要な経路を抽出する精度を向上させることができるので、適切な経路の設計変更に関する提案をすることができる。その結果、鉱山の管理者又は運用者は、設計変更が必要な経路を速やかに改善することができるので、鉱山の生産性低下を最小限に抑えることができる。
【0130】
次に、ステップS704に戻って説明する。長時間停止イベントが発生した各ダンプトラック20の停車位置は、所定範囲LB(図23参照)外であると判断される場合(ステップS704、No)、ステップS707に進む。ステップS707において、図2に示す管理装置10が有する管理側処理装置12の運転者状態解析部12gは、長時間停止イベントが発生した各ダンプトラック20を運転した運転者の運転者IDを抽出し、運転者の勤怠状態に関する疲労確認指標としての運転者疲労確認提案を作成する。ステップS704で否定(No)と判断されるケースは、ダンプトラック20に異常がなく、複数のダンプトラック20が異なる場所で長時間停止したと判断できる。このような場合、運転者が必要以上に休憩していたり、運転者に体調不良等が発生していたりするおそれが想定できるので、運転者の体調又は勤怠状態を確認(勤怠状態の管理)する余地ありと判断して、ステップS707において運転者状態解析部12gは、運転者疲労確認提案を作成する。
【0131】
次に、ステップS708に進み、運転者状態解析部12gは、作成した運転者疲労確認提案に基づき、ダンプトラック20の番号又は運転者IDをレポートにグラフィック及び文字で出力する。このように、本解析例は、同じ経路を走行したダンプトラック20同士について、所定時間以上の長時間停止が発生した位置に関する長時間停止位置情報に基づき、運転者疲労確認提案を作成する。その結果、健康状態を確認すべき運転者及び勤怠状態を確認すべき運転者を抽出する精度を向上させることができる。鉱山の管理者又は運用者は、運転者の勤怠状態の管理改善を行ったり、鉱山のオペレーションの改善を行ったりすることができ、鉱山の生産性の維持向上や安全の確保に努めることができる。
【0132】
次に、ステップS703に戻って説明する。長時間停止イベントが発生した各ダンプトラック20に、エラーイベント(異常の発生)がある場合(ステップS703、Yes)、ステップS709に進む。ステップS709において、図2に示す管理装置10が有する管理側処理装置12の異常解析部12hは、エラーイベントが発生したダンプトラック20について、点検提案を作成する。すなわち、ステップS703で肯定(Yes)と判断されるケースは、ダンプトラック20に異常が発生した結果、長時間停止が発生したと判断できるので、ダンプトラック20の点検又は修理が必要である可能性が高いと判断できるからである。
【0133】
次に、ステップS710に進み、異常解析部12hは、作成した点検提案に基づき、ダンプトラック20の番号及びエラーイベントの内容をレポートにグラフィック及び文字で出力する。このように、本解析例は、同じ経路を走行したダンプトラック20同士について、所定時間以上の長時間停止及び異常に関する異常情報に基づき、ダンプトラック20の点検提案を作成する。このため、ダンプトラック20の異常を抽出する精度が向上するので、異常が発生したダンプトラック20を速やかに点検、修理して復旧させることができる。その結果、鉱山の生産性低下を最小限に抑えることができる。鉱山の管理者又は運用者は、点検提案を受けて各ダンプトラック20の修理、予防保全又は鉱山のオペレーション計画の立案を行うことができる。
【0134】
<特定された経路を利用した稼働情報の解析例4>
図26は、稼働情報を解析して運転指導指標又は積載改善要求指標を作成する例を示すフローチャートである。図27は、鉱山で稼働する複数のダンプトラック20(20A、20B、20C)を示す図である。図28は、図27に示すダンプトラック20(20A、20B、20C)の運転者と経路とを示す図表である。この例は、同じ経路を走行したダンプトラック20の稼働情報から、必要に応じて運転者の技能を改善するための運転指導指標、過積載又は過小積載の改善を要求する積載改善要求指標を作成する。次に、稼働情報の解析例4の手順を説明する。
【0135】
稼働情報の解析例4を実行するにあたり、ステップS801において、図2に示す管理装置10が有する管理側処理装置12の運転解析部12iは、判別した経路を走行したダンプトラック20の稼働情報を抽出する。次に、ステップS802において、運転解析部12iは、特定の経路、すなわち同一の経路を走行した複数のダンプトラック20の稼働情報から運転者を抽出する。
【0136】
鉱山では、図27に示すように、複数のダンプトラック20A、20B、20Cが稼働している。鉱山においては、同一の運転者であっても、複数のダンプトラックを運転することがある。例えば、図28に示すように、運転者Aは、ダンプトラック20A、20Bを運転している。また、鉱山においては、一人の運転者が複数の経路を運転することがある。例えば、運転者A、B、Dは、それぞれ複数の経路を運転している。さらに、すべてのダンプトラック20A、20B、20Cが必ずすべての経路を走行するとは限らない。例えば、図28に示す例では、ダンプトラック20A、20B、20Cは、いずれもすべての経路R1、R2、R3、R4を走行していない。稼働情報から運転者に対する運転指導指標を作成する場合、同一の運転者の情報を抽出する必要がある。このため、ステップS802において、運転解析部12iは運転者を抽出する。
【0137】
次に、ステップS803において、各運転者の運転時に、所定の回数OL以上の過積載イベント(積載量情報)が発生していないと判断される場合(ステップS803、No)、ステップS804に進む。ステップS804において、各運転者の運転時に、所定の回数DL以上の過小積載イベント(積載量情報)が発生していないと判断される場合(ステップS804、No)、ステップS805に進む。ここで、過積載イベント又は過小積載イベントの情報は、次のように生成される。ダンプトラック20の車格、種類又は鉱山の運用規則に従って、積載量が過積載か過小積載かを判断する指標となる、適正積載量を予め設定し車載記憶装置31に記憶しておく。積載量は、上述のように圧力センサ26によって計測できるので、車載情報収集装置30は、計測された積載量が適正積載量と比較して多いか少ないかを判断し、多いと判断されたならば過積載イベントの情報を生成し、少ないと判断されたならば過小積載イベントの情報を生成する。生成された過積載イベントあるいは過小積載イベントは、車載記憶装置31に記憶される。適正積載量については、詳細を後述する。ステップS805において、運転解析部12iは、ステップS802における経路での平均サイクル時間(排土終了から積荷を積載して排土するまでに要した時間)、平均燃費(燃費情報)及び平均積載量(積載量情報)を稼働情報に基づいて各運転者ID毎に算出する。
【0138】
次に、ステップS806に進み、運転解析部12iは、各経路毎に設定されてる評価基準値Evを管理側記憶装置13から読み込む。評価基準値Evは、適正燃費と適正積載量と適正サイクル時間とを加算したものである。適正積載量は、ダンプトラック20に対し過積載が行われると車体21等に過度の負荷が作用したり、ブレーキ及びタイヤに負担をかけて異常な消耗や摩耗を起こすおそれがあるとして設計上決められる、ダンプトラック20の車格又は種類によって定められる最大積載量であることが好ましい。また、鉱山の生産性を考慮すると、過小積載は生産性を悪化させるため、過小積載と判断される積載量(過小積載量)を定め、過小積載量と最大積載量との間に適正積載量を設定してもよい。評価基準値Evは、ダンプトラック20の車格、種類又は走行する経路によって異なる値である。このため、評価基準値Evは、ダンプトラック20が走行する経路を設計した後に、シミュレーション又は実際にダンプトラック20に積荷を積載して走行させることにより求めた値を用いる。あるいは、運用時に複数のデータを取得して平均値として求めた値を評価基準値Evとして用いてもよい。次に、ステップS807に進み、運転解析部12iは、各運転者毎に評価値Eopを求める。Eopは、平均燃費と平均積載量と平均サイクル時間とを加算したものである。
【0139】
ステップS808において、公差をAに設定し、評価値Eopが評価基準値Evに公差Aを考慮した範囲にない(Ev−A≦Eop≦Ev+Aが成立しない)と判断される場合(ステップS808、No)、ステップS809に進み、運転解析部12iは、運転者の運転の改善を要求する運転指導指標としての運転指導提案を作成する。すなわち、公差Aを考慮しても評価値Eopが評価基準値Evを外れると判断される場合、その運転者の運転技能は改善の余地があると判断できるからである。一方、Ev−A≦Eop≦Ev+Aが成立すると判断される場合(ステップS808、Yes)、ステップS810に進み、運転解析部12iは、優良運転情報を作成する。
【0140】
次に、ステップS811において、運転解析部12iは、運転指導提案又は優良運転情報に基づき、経路識別ID、ダンプトラック番号又は運転者ID、評価値Eop、平均燃費と適正燃費との比較データ、平均積載量と適正積載量との比較データ及び平均サイクル時間と適正サイクルタ時間との比較データを、レポートにグラフィック及び文字で出力する。このように、本解析例は、同じ経路を走行したダンプトラック20について、同一の運転者を評価することにより、運転の改善が必要な運転者を抽出する精度を向上させることができる。このため、本解析例は、運転指導提案を提供することができる。その結果、運転者の運転技能を向上させて、ダンプトラック20に対して、過積載による車体21等の損傷、ブレーキの消耗抑制、タイヤ摩耗の抑制又は適正な制動距離による停止による安全確保を実現するとともに燃費低減を図り、鉱山の生産性低下を最小限に抑えることができる。鉱山の管理者又は運用者は、運転指導提案を受けて、運転者に対して、過積載や過小積載を行った運転の防止又は燃費に悪い運転の防止といった教育指導を施すことができる。また、運転者が直接、運転指導提案を受けて、運転の改善を図ることもできる。
【0141】
なお、評価基準値Evを、次のような手法にて定めてもよい。上述において、評価基準値Evは、単に適正燃費と適正積載量と適正サイクル時間とを加算したものとしたが、鉱山のオペレーションの考え方又は鉱山のオペレーションの計画(生産計画)によっては、これら3個の要素の重要度(重み)が異なる場合がある。例えば、ダンプトラック20の燃費は下位の重要度として、生産量を確保したい(積載量を稼ぎたい)といった場合がある。そこで、3個の要素に対して、重み係数a(a1,a2,a3)を積算して合計し、それを評価基準値Ev’とする。具体的には、Ev’=a1×(1/適正燃費)+a2×適正積載量+a3×(1/適正サイクル時間)という算出式によって評価基準値Evを求め、設定しておく。このような手法によれば、3個の要素(適正燃費、適正積載量、適正サイクル時間)は固定したまま、鉱山のオペレーションの考え方又は計画に応じて、重み係数であるa(a1,a2,a3)を変更することで、適正な運転指導提案を作成することが可能となる。なお、この手法による場合の公差Aは、上述の公差Aとは異なる値で、この手法による評価基準値Ev’に応じた公差A’となる。
【0142】
次に、ステップS804に戻って説明する。各運転者の運転時に、所定の回数DL以上の過小積載イベントが発生したと判断される場合(ステップS804、Yes)、ステップS812に進む。ステップS812において、図2に示す管理装置10が有する管理側処理装置12の積載量解析部12jは、積載改善要求指標としての過小積載改善提案を作成する。次に、ステップS813に進み、積載量解析部12jは、過小積載改善提案に基づき、運転者ID(油圧ショベル等の積込機4を運転する運転者のID及びダンプトラック20の運転者のID)と過小積載量と過小積載回数とをレポートにグラフィック及び文字で出力する。なお、積込機4の運転者のIDは、予め管理側記憶装置13に登録し記憶しておき、特定の経路の情報と関連付けておくことで、その特定の経路で行われた積込作業に関わった積込機4(積込機4の運転者ID)を抽出することができる。また、積込機4に上述のような読み取り装置51を備え、読み取られた運転者IDを積込作業に関わったダンプトラック20に無線通信で送信し、ダンプトラック20の車載無線通信装置27を介して車載記憶装置31に記憶するようにしておけば、特定の経路で行われた積込作業に関わった積込機4(積込機4の運転者ID)を抽出することができる。このようにすることで、過小積載の改善を促すことができるので、鉱山の生産性低下を最小限に抑えることができる。また、過小積載が頻繁に行われることは、ダンプトラック20が頻繁に経路を走行し燃料消費が多くなることにもなるため、過小積載改善提案を受けたダンプトラック20又は積込機4の運転者は、改善を図ることでダンプトラック20の燃料消費を抑制することができる。
【0143】
次に、ステップS803に戻って説明する。各運転者の運転時に、所定の回数OL以上の過積載イベントが発生したと判断される場合(ステップS803、Yes)、ステップS814に進む。ステップS814において、積載量解析部12jは、積載改善要求指標として過積載改善提案を作成する。次に、ステップS815に進み、積載量解析部12jは、過積載改善提案に基づき、運転者ID(油圧ショベル等の積込機4を運転する運転者のID及びダンプトラック20の運転者のID)と過小積載量と過小積載回数とをレポートにグラフィック及び文字で出力する。このようにすることで、過積載の改善を促すことができるので、ダンプトラック20の損傷の防止と安全の確保を行うことができる。
【符号の説明】
【0144】
1 鉱山機械の管理システム(管理システム)
2 給油所
3 中継器
4 油圧ショベル
5A、5B、5C GPS衛星
6 中間中継器
7 通信可能範囲
10 管理装置
12 管理側処理装置
12a 走行経路特定部
12b 勾配解析部
12c 路面状態解析部
12d 燃費解析部
12e 渋滞解析部
12f 走行経路解析部
12g 運転者状態解析部
12h 異常解析部
12i 運転解析部
12j 積載量解析部
13 管理側記憶装置
15 入出力部
16 表示装置
17 入力装置
18 管理側無線通信装置
18A アンテナ
19 出力装置
20、20A、20B、20C ダンプトラック
21 車両本体
22 ベッセル
23 車輪
24 サスペンションシリンダー
25 回転センサ
26 圧力センサ
27 車載無線通信装置
29 位置情報検出装置
30 車載情報収集装置
31 車載記憶装置
32A エンジン制御装置
32B 走行制御装置
32C 油圧制御装置
33A アクセル
33B シフトレバー
33C ダンプレバー
35 作動油コントロールバルブ
36 ホイストシリンダー
37 走行装置
38 取得装置
39 傾斜計(傾斜センサ)
50a〜50g 識別体
51 読み取り装置
【特許請求の範囲】
【請求項1】
鉱山で作業する鉱山機械に搭載されて、前記鉱山機械の稼働状態に関する稼働情報を収集する車載情報収集装置と、
前記鉱山機械に搭載されて通信を行う車載無線通信装置と、
前記車載無線通信装置と通信する管理側無線通信装置と、
前記車載無線通信装置と前記管理側無線通信装置とを介して前記稼働情報を収集する管理装置と、を含み、
前記管理装置は、
前記稼働情報に含まれる、前記鉱山機械が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報に基づき、前記鉱山機械が走行した経路を特定する、ことを特徴とする鉱山機械の管理システム。
【請求項2】
鉱山で作業する鉱山機械に搭載されて、前記鉱山機械の稼働状態に関する稼働情報を収集する車載情報収集装置と、
前記鉱山機械に搭載されて通信を行う車載無線通信装置と、
を含み、
前車載情報収集装置は、
前記稼働情報に含まれる、前記鉱山機械が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報と、予め設定された指定経路の位置情報とに基づき、前記鉱山機械が走行した経路を特定し、
前記車載無線通信装置は、
特定された前記鉱山機械が走行した経路を管理装置に送信する、ことを特徴とする鉱山機械の管理システム。
【請求項3】
前記鉱山機械が走行した経路は、
排土場における位置情報と、積込場における位置情報と、前記排土場と前記積込場との間における2箇所の位置情報と、に基づいて特定される、請求項1又は2に記載の鉱山機械の管理システム。
【請求項4】
前記鉱山機械が走行した経路が特定される際に、前記経路に含まれる複数箇所の位置情報の数値が丸められる、請求項1から3のいずれか1項に記載の鉱山機械の管理システム。
【請求項5】
前記稼働情報が収集された鉱山機械が走行したとして特定された経路と、収集された前記稼働情報とを対応付けて記憶する管理側記憶装置を有する、請求項1から3のいずれか1項に記載の鉱山機械の管理システム。
【請求項6】
前記管理装置は、前記稼働情報を解析するにあたって、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から路面の凹凸に関する路面情報を抽出し、
抽出した前記路面情報に基づいて路面の整備に関する指標を作成する、請求項1から5のいずれか1項に記載の鉱山機械の管理システム。
【請求項7】
前記管理装置は、前記稼働情報を解析するにあたって、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行中の燃料消費に関する燃費情報を抽出し、
抽出した前記燃費情報に基づいて燃料消費に関する指標を作成する、請求項1から5のいずれか1項に記載の鉱山機械の管理システム。
【請求項8】
前記管理装置は、前記稼働情報を解析するにあたって、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行時間と停止時間とを抽出し、
抽出した前記走行中時間と前記停止時間とに基づいて鉱山機械の走行速度の改善に関する指標を作成する、請求項1から5のいずれか1項に記載の鉱山機械の管理システム。
【請求項9】
前記管理装置は、前記稼働情報を解析するにあたって、
前記走行速度の改善に関する指標に対応する経路を走行した複数の鉱山機械の稼働情報から、所定時間以上の停止に関する長時間停止情報と、前記複数の鉱山機械の異常に関する異常情報とを抽出し、
抽出した前記長時間停止情報と前記異常情報とに基づいて、鉱山機械の点検に関する指標を作成する、請求項8に記載の鉱山機械の管理システム。
【請求項10】
前記管理装置は、前記稼働情報を解析するにあたって、
前記走行速度の改善に関する指標に対応する経路を走行した鉱山機械の稼働情報から、さらに前記所定時間以上の停止が発生した位置に関する長時間停止位置情報を抽出し、
抽出した前記長時間停止情報及び長時間停止位置情報に基づいて、鉱山機械の運転者の勤怠状態に関する疲労確認指標又は前記鉱山機械の経路の変更に関する経路変更指標を作成する、請求項8又は9に記載の鉱山機械の管理システム。
【請求項11】
前記管理装置は、前記稼働情報を解析するにあたって、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報を抽出し、
抽出した前記積載量情報に基づいて、過積載の改善又は過小積載の改善を要求する積載改善要求指標を作成する、請求項1から5のいずれか1項に記載の鉱山機械の管理システム。
【請求項12】
前記管理装置は、前記稼働情報を解析するにあたって、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報と、走行中の燃料消費に関する燃費情報と、排土終了から積荷を積載して排土するまでに要した時間に関するサイクル時間情報とを抽出し、
抽出した前記積載量情報と、前記燃費情報と、前記サイクル時間情報とに基づいて、鉱山機械を運転する運転者の運転の改善を要求する、運転指導指標を作成する請求項1から5のいずれか1項に記載の鉱山機械の管理システム。
【請求項13】
前記管理装置は、
前記特定された経路の勾配に応じて複数のセクションに分割し、分割された前記セクション毎に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報を解析する、請求項6から12のいずれか1項に記載の鉱山機械の管理システム。
【請求項14】
鉱山で作業する鉱山機械の稼働情報を取得する手順と、
前記稼働情報に含まれる、前記鉱山機械が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報に基づき、前記鉱山機械が走行した経路を特定する手順と、
を含むことを特徴とする鉱山機械の管理方法。
【請求項15】
前記鉱山機械が走行した経路は、
排土場における位置情報と、積込場における位置情報と、前記排土場と前記積込場との間における2箇所の位置情報と、に基づいて特定される、請求項14に記載の鉱山機械の管理方法。
【請求項16】
前記鉱山機械が走行した経路が特定される際に、前記経路に含まれる複数箇所の位置情報の数値が丸められる、請求項14又は15に記載の鉱山機械の管理方法。
【請求項17】
前記稼働情報が収集された鉱山機械が走行したとして特定された経路と、収集された前記稼働情報とを対応付けて記憶する管理側記憶装置を有する、請求項14から16のいずれか1項に記載の鉱山機械の管理方法。
【請求項18】
前記経路が特定された後に、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から路面の凹凸に関する路面情報を抽出する手順と、
抽出した前記路面情報に基づいて路面の整備に関する指標を作成する手順と、
を含む請求項14から17のいずれか1項に記載の鉱山機械の管理方法。
【請求項19】
前記経路が特定された後に、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行中の燃料消費に関する燃費情報を抽出する手順と、
抽出した前記燃費情報に基づいて燃料消費に関する指標を作成する手順と、
を含む請求項14から17のいずれか1項に記載の鉱山機械の管理方法。
【請求項20】
前記経路が特定された後に、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行時間と停止時間とを抽出する手順と、
抽出した前記走行中時間と前記停止時間とに基づいて鉱山機械の走行速度の改善に関する指標を作成する手順と、
を含む請求項14から17のいずれか1項に記載の鉱山機械の管理方法。
【請求項21】
前記経路が特定された後に、
前記走行速度の改善に関する指標に対応する経路を走行した複数の鉱山機械の稼働情報から、所定時間以上の停止に関する長時間停止情報と、前記複数の鉱山機械の異常に関する異常情報とを抽出する手順と、
抽出した前記長時間停止情報と前記異常情報とに基づいて、鉱山機械の点検に関する指標を作成する手順と、
を含む請求項20に記載の鉱山機械の管理方法。
【請求項22】
前記経路が特定された後に、
前記走行速度の改善に関する指標に対応する経路を走行した鉱山機械の稼働情報から、さらに前記所定時間以上の停止が発生した位置に関する長時間停止位置情報を抽出する手順と、
抽出した前記長時間停止情報及び長時間停止位置情報に基づいて、鉱山機械の運転者の勤怠状態に関する疲労確認指標又は前記鉱山機械の経路の変更に関する経路変更指標を作成する手順と、
を含む請求項20又は21に記載の鉱山機械の管理方法。
【請求項23】
前記経路が特定された後に、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報を抽出する手順と、
抽出した前記積載量情報に基づいて、過積載の改善又は過小積載の改善を要求する積載改善要求指標を作成する手順と、
を含む請求項14から17のいずれか1項に記載の鉱山機械の管理方法。
【請求項24】
前記経路が特定された後に、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報と、走行中の燃料消費に関する燃費情報と、排土終了から積荷を積載して排土するまでに要した時間に関するサイクル時間情報とを抽出する手順と、
抽出した前記積載量情報と、前記燃費情報と、前記サイクル時間情報とに基づいて、鉱山機械を運転する運転者の運転の改善を要求する運転指導指標を作成する手順と、
を含む請求項14から17のいずれか1項に記載の鉱山機械の管理方法。
【請求項25】
前記経路が特定された後に、
前記特定された経路の勾配に応じて複数のセクションに分割し、分割された前記セクション毎に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報を解析する、請求項18から24のいずれか1項に記載の鉱山機械の管理方法。
【請求項1】
鉱山で作業する鉱山機械に搭載されて、前記鉱山機械の稼働状態に関する稼働情報を収集する車載情報収集装置と、
前記鉱山機械に搭載されて通信を行う車載無線通信装置と、
前記車載無線通信装置と通信する管理側無線通信装置と、
前記車載無線通信装置と前記管理側無線通信装置とを介して前記稼働情報を収集する管理装置と、を含み、
前記管理装置は、
前記稼働情報に含まれる、前記鉱山機械が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報に基づき、前記鉱山機械が走行した経路を特定する、ことを特徴とする鉱山機械の管理システム。
【請求項2】
鉱山で作業する鉱山機械に搭載されて、前記鉱山機械の稼働状態に関する稼働情報を収集する車載情報収集装置と、
前記鉱山機械に搭載されて通信を行う車載無線通信装置と、
を含み、
前車載情報収集装置は、
前記稼働情報に含まれる、前記鉱山機械が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報と、予め設定された指定経路の位置情報とに基づき、前記鉱山機械が走行した経路を特定し、
前記車載無線通信装置は、
特定された前記鉱山機械が走行した経路を管理装置に送信する、ことを特徴とする鉱山機械の管理システム。
【請求項3】
前記鉱山機械が走行した経路は、
排土場における位置情報と、積込場における位置情報と、前記排土場と前記積込場との間における2箇所の位置情報と、に基づいて特定される、請求項1又は2に記載の鉱山機械の管理システム。
【請求項4】
前記鉱山機械が走行した経路が特定される際に、前記経路に含まれる複数箇所の位置情報の数値が丸められる、請求項1から3のいずれか1項に記載の鉱山機械の管理システム。
【請求項5】
前記稼働情報が収集された鉱山機械が走行したとして特定された経路と、収集された前記稼働情報とを対応付けて記憶する管理側記憶装置を有する、請求項1から3のいずれか1項に記載の鉱山機械の管理システム。
【請求項6】
前記管理装置は、前記稼働情報を解析するにあたって、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から路面の凹凸に関する路面情報を抽出し、
抽出した前記路面情報に基づいて路面の整備に関する指標を作成する、請求項1から5のいずれか1項に記載の鉱山機械の管理システム。
【請求項7】
前記管理装置は、前記稼働情報を解析するにあたって、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行中の燃料消費に関する燃費情報を抽出し、
抽出した前記燃費情報に基づいて燃料消費に関する指標を作成する、請求項1から5のいずれか1項に記載の鉱山機械の管理システム。
【請求項8】
前記管理装置は、前記稼働情報を解析するにあたって、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行時間と停止時間とを抽出し、
抽出した前記走行中時間と前記停止時間とに基づいて鉱山機械の走行速度の改善に関する指標を作成する、請求項1から5のいずれか1項に記載の鉱山機械の管理システム。
【請求項9】
前記管理装置は、前記稼働情報を解析するにあたって、
前記走行速度の改善に関する指標に対応する経路を走行した複数の鉱山機械の稼働情報から、所定時間以上の停止に関する長時間停止情報と、前記複数の鉱山機械の異常に関する異常情報とを抽出し、
抽出した前記長時間停止情報と前記異常情報とに基づいて、鉱山機械の点検に関する指標を作成する、請求項8に記載の鉱山機械の管理システム。
【請求項10】
前記管理装置は、前記稼働情報を解析するにあたって、
前記走行速度の改善に関する指標に対応する経路を走行した鉱山機械の稼働情報から、さらに前記所定時間以上の停止が発生した位置に関する長時間停止位置情報を抽出し、
抽出した前記長時間停止情報及び長時間停止位置情報に基づいて、鉱山機械の運転者の勤怠状態に関する疲労確認指標又は前記鉱山機械の経路の変更に関する経路変更指標を作成する、請求項8又は9に記載の鉱山機械の管理システム。
【請求項11】
前記管理装置は、前記稼働情報を解析するにあたって、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報を抽出し、
抽出した前記積載量情報に基づいて、過積載の改善又は過小積載の改善を要求する積載改善要求指標を作成する、請求項1から5のいずれか1項に記載の鉱山機械の管理システム。
【請求項12】
前記管理装置は、前記稼働情報を解析するにあたって、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報と、走行中の燃料消費に関する燃費情報と、排土終了から積荷を積載して排土するまでに要した時間に関するサイクル時間情報とを抽出し、
抽出した前記積載量情報と、前記燃費情報と、前記サイクル時間情報とに基づいて、鉱山機械を運転する運転者の運転の改善を要求する、運転指導指標を作成する請求項1から5のいずれか1項に記載の鉱山機械の管理システム。
【請求項13】
前記管理装置は、
前記特定された経路の勾配に応じて複数のセクションに分割し、分割された前記セクション毎に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報を解析する、請求項6から12のいずれか1項に記載の鉱山機械の管理システム。
【請求項14】
鉱山で作業する鉱山機械の稼働情報を取得する手順と、
前記稼働情報に含まれる、前記鉱山機械が排土した場所から積荷を積み込む場所に移動し再び排土する場所に移動するまでの経路に含まれる少なくとも4箇所の位置情報に基づき、前記鉱山機械が走行した経路を特定する手順と、
を含むことを特徴とする鉱山機械の管理方法。
【請求項15】
前記鉱山機械が走行した経路は、
排土場における位置情報と、積込場における位置情報と、前記排土場と前記積込場との間における2箇所の位置情報と、に基づいて特定される、請求項14に記載の鉱山機械の管理方法。
【請求項16】
前記鉱山機械が走行した経路が特定される際に、前記経路に含まれる複数箇所の位置情報の数値が丸められる、請求項14又は15に記載の鉱山機械の管理方法。
【請求項17】
前記稼働情報が収集された鉱山機械が走行したとして特定された経路と、収集された前記稼働情報とを対応付けて記憶する管理側記憶装置を有する、請求項14から16のいずれか1項に記載の鉱山機械の管理方法。
【請求項18】
前記経路が特定された後に、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から路面の凹凸に関する路面情報を抽出する手順と、
抽出した前記路面情報に基づいて路面の整備に関する指標を作成する手順と、
を含む請求項14から17のいずれか1項に記載の鉱山機械の管理方法。
【請求項19】
前記経路が特定された後に、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行中の燃料消費に関する燃費情報を抽出する手順と、
抽出した前記燃費情報に基づいて燃料消費に関する指標を作成する手順と、
を含む請求項14から17のいずれか1項に記載の鉱山機械の管理方法。
【請求項20】
前記経路が特定された後に、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から走行時間と停止時間とを抽出する手順と、
抽出した前記走行中時間と前記停止時間とに基づいて鉱山機械の走行速度の改善に関する指標を作成する手順と、
を含む請求項14から17のいずれか1項に記載の鉱山機械の管理方法。
【請求項21】
前記経路が特定された後に、
前記走行速度の改善に関する指標に対応する経路を走行した複数の鉱山機械の稼働情報から、所定時間以上の停止に関する長時間停止情報と、前記複数の鉱山機械の異常に関する異常情報とを抽出する手順と、
抽出した前記長時間停止情報と前記異常情報とに基づいて、鉱山機械の点検に関する指標を作成する手順と、
を含む請求項20に記載の鉱山機械の管理方法。
【請求項22】
前記経路が特定された後に、
前記走行速度の改善に関する指標に対応する経路を走行した鉱山機械の稼働情報から、さらに前記所定時間以上の停止が発生した位置に関する長時間停止位置情報を抽出する手順と、
抽出した前記長時間停止情報及び長時間停止位置情報に基づいて、鉱山機械の運転者の勤怠状態に関する疲労確認指標又は前記鉱山機械の経路の変更に関する経路変更指標を作成する手順と、
を含む請求項20又は21に記載の鉱山機械の管理方法。
【請求項23】
前記経路が特定された後に、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報を抽出する手順と、
抽出した前記積載量情報に基づいて、過積載の改善又は過小積載の改善を要求する積載改善要求指標を作成する手順と、
を含む請求項14から17のいずれか1項に記載の鉱山機械の管理方法。
【請求項24】
前記経路が特定された後に、
同一の前記特定された経路を走行した複数の鉱山機械の稼働情報から、前記複数の鉱山機械が積載した積荷の積載量に関する積載量情報と、走行中の燃料消費に関する燃費情報と、排土終了から積荷を積載して排土するまでに要した時間に関するサイクル時間情報とを抽出する手順と、
抽出した前記積載量情報と、前記燃費情報と、前記サイクル時間情報とに基づいて、鉱山機械を運転する運転者の運転の改善を要求する運転指導指標を作成する手順と、
を含む請求項14から17のいずれか1項に記載の鉱山機械の管理方法。
【請求項25】
前記経路が特定された後に、
前記特定された経路の勾配に応じて複数のセクションに分割し、分割された前記セクション毎に、同一の前記特定された経路を走行した複数の鉱山機械の稼働情報を解析する、請求項18から24のいずれか1項に記載の鉱山機械の管理方法。
【図1】


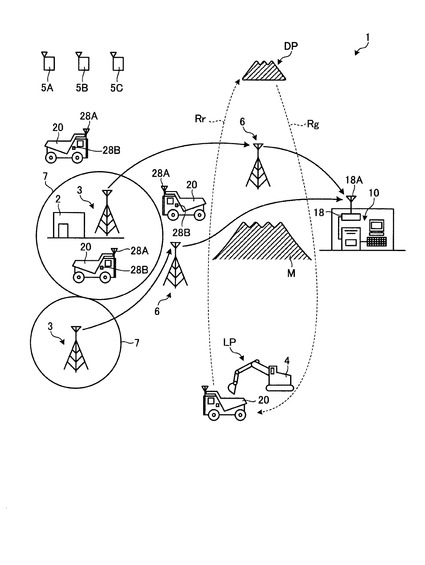
【図2】
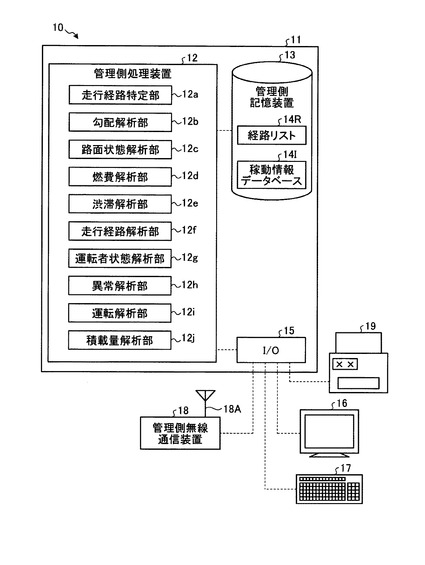
【図3】
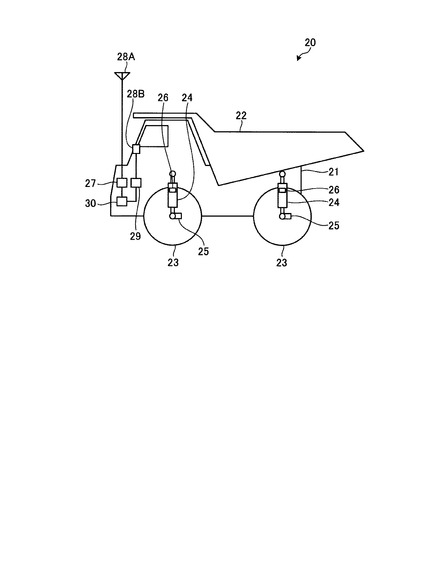
【図4】
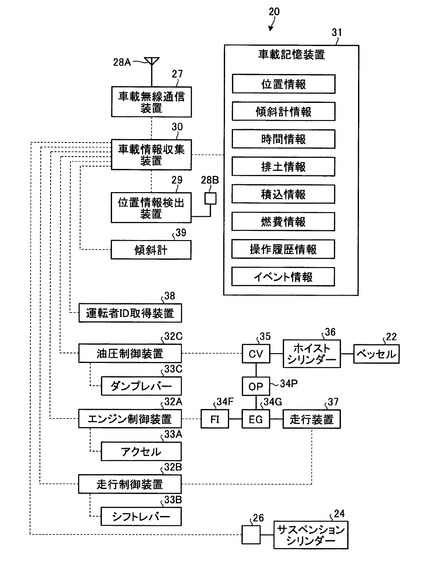
【図5】
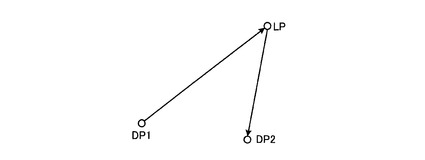
【図6】
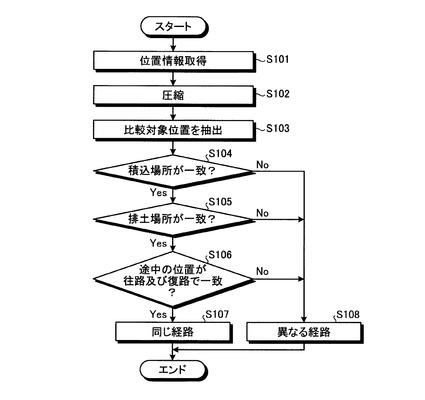
【図7】
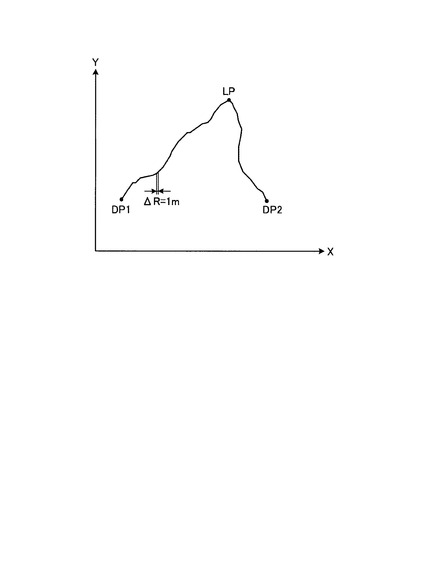
【図8】
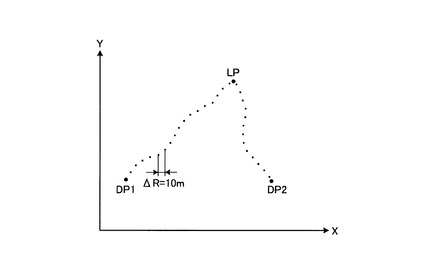
【図9】
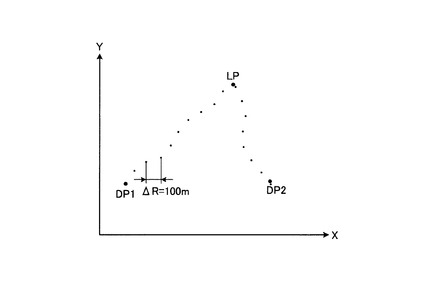
【図10】
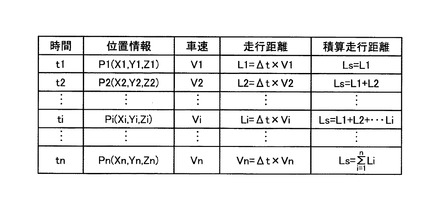
【図11】
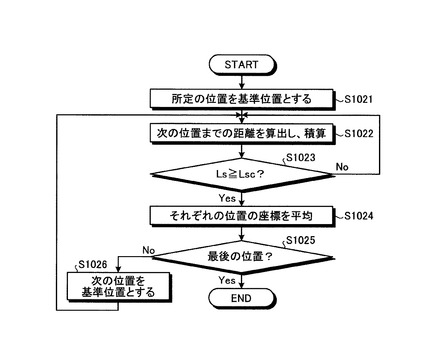
【図12】
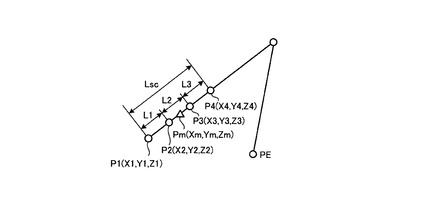
【図13】
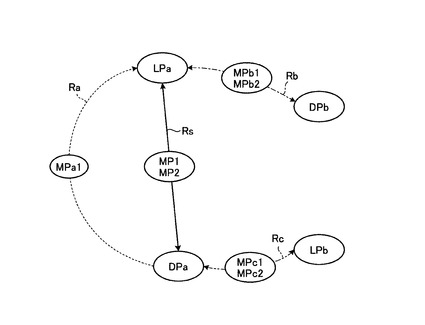
【図14】
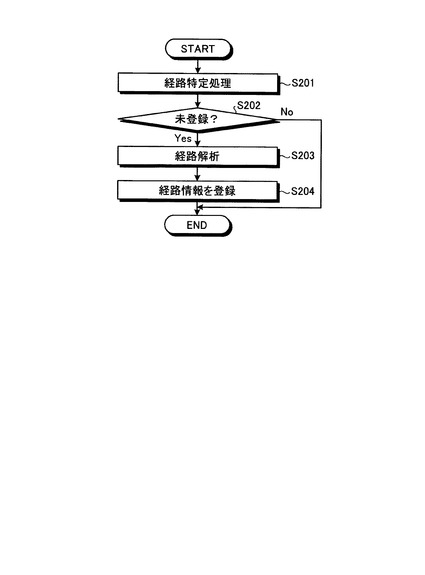
【図15】
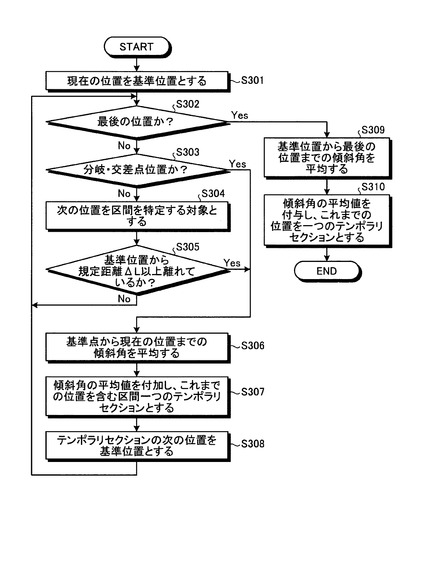
【図16】
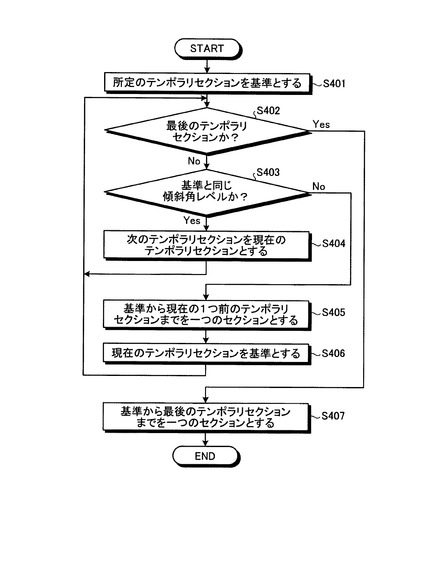
【図17】
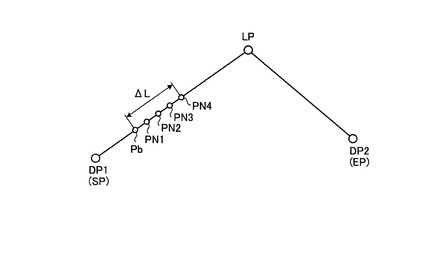
【図18】
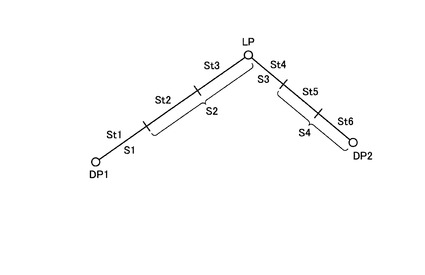
【図19】
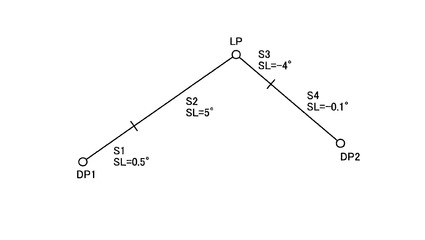
【図20】
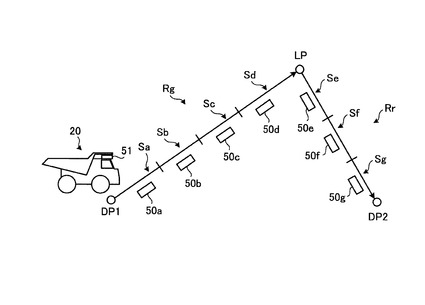
【図21】
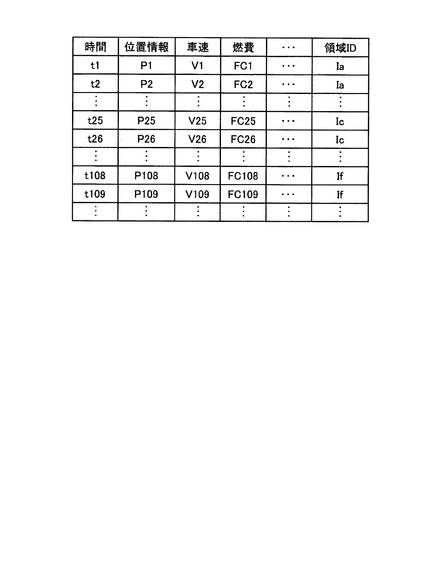
【図22】
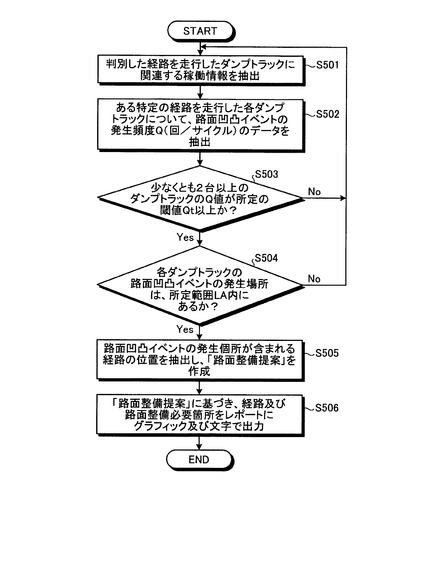
【図23】
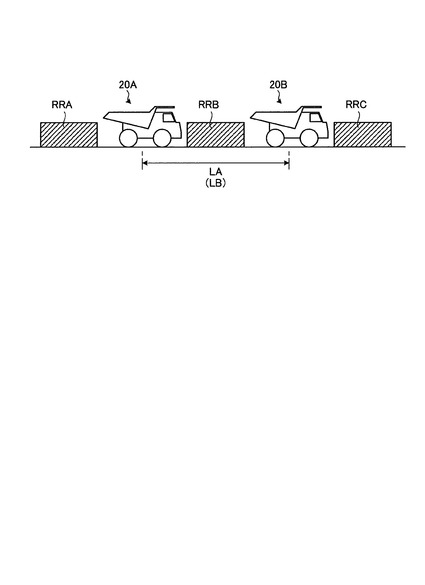
【図24】
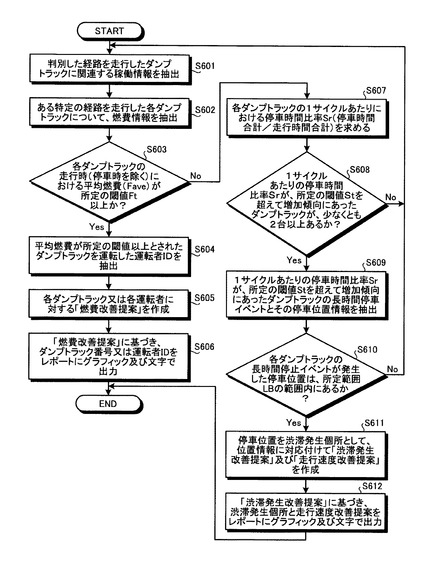
【図25】
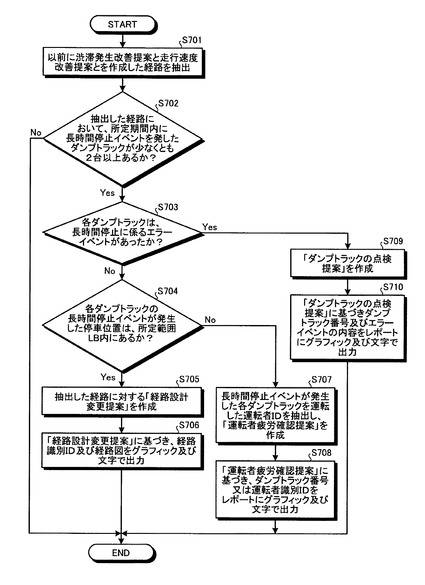
【図26】
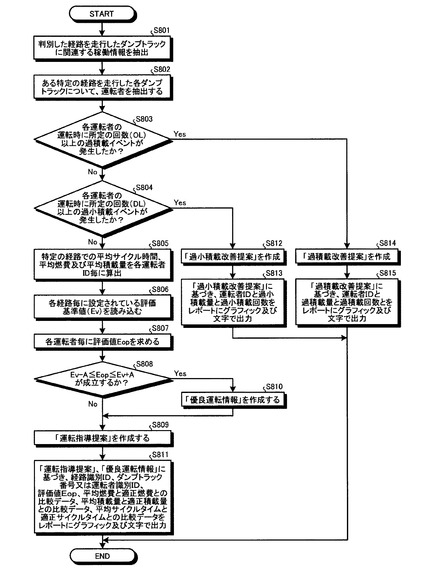
【図27】
【図28】
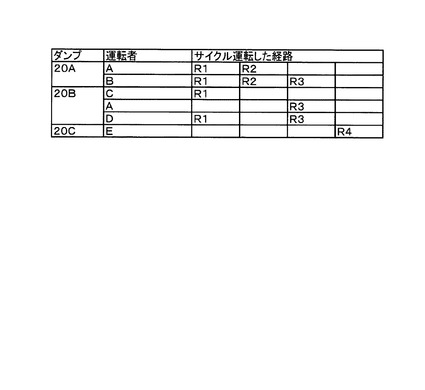
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公開番号】特開2013−105278(P2013−105278A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−248058(P2011−248058)
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000001236)株式会社小松製作所 (1,686)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000001236)株式会社小松製作所 (1,686)
[ Back to top ]