
長ストロークロボットハンド
【課題】ワークの姿勢により把持爪の挿入位置と把持位置が大きく変動する場合でも、必要とする長ストロークの開閉が可能であり、かつ挿入位置を任意に設定することができ、かつ挿入位置及び把持位置にかかわらず大きな把持力を有し、かつ小型軽量化が可能である長ストロークロボットハンドを提供する。
【解決手段】搬送ロボットのハンド取付部5に取り付けられたハンド本体12と、ハンド本体に上端部が水平方向に開閉可能に取り付けられ下方に延びる1対の把持爪14と、各把持爪を所望の最大力で水平方向に移動可能な1対の流体圧アクチュエータ16と、各流体圧アクチュエータを所望の最大ストロークで水平方向に移動可能な1対の電動アクチュエータ18と、各流体圧アクチュエータを前記最大ストローク内の任意の位置で固定する位置決め装置20とを備える。
【解決手段】搬送ロボットのハンド取付部5に取り付けられたハンド本体12と、ハンド本体に上端部が水平方向に開閉可能に取り付けられ下方に延びる1対の把持爪14と、各把持爪を所望の最大力で水平方向に移動可能な1対の流体圧アクチュエータ16と、各流体圧アクチュエータを所望の最大ストロークで水平方向に移動可能な1対の電動アクチュエータ18と、各流体圧アクチュエータを前記最大ストローク内の任意の位置で固定する位置決め装置20とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、長ストロークの開閉ができ、挿入位置及び把持位置にかかわらず大きな把持力を有する長ストロークロボットハンドに関する。
【背景技術】
【0002】
バラ積みされたワーク(例えば、管継手、ボルト、ナット、等)を把持してハンドリングする場合に、真空吸着を利用した真空吸着パッド、電磁石、ワークを機械的に把持するロボットハンド、等が従来から用いられている。
このうち、真空吸着パッドと電磁石は、把持したワークの姿勢がランダムであるため、次工程にそのまま適用できない問題がある。
そこでこのような場合、ワークを機械的に把持するロボットハンドが用いられる。
【0003】
視覚センサによる物体認識技術の進歩に伴い、バラ積みされたワークであっても、ロボットハンドの姿勢をワークに対応させて変化させ、ロボットハンドに設けられた把持爪をワーク間の隙間に挿入して、特定のワークを把持しハンドリングすることができる。
【0004】
しかし、この場合、把持爪の間隔をワークの大きさに合わせて調節する必要がある。そこで、この問題を解決するために、例えば特許文献1が既に提案されている。
【0005】
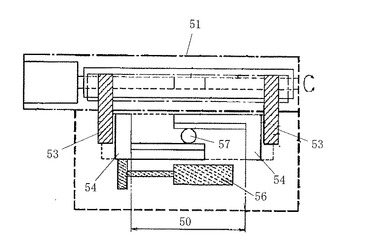
特許文献1は、エアシリンダ等によってON/OFF式の迅速な水平開閉の把持動作を行う市販のロボットハンドを利用して、ロボットハンドの把持間隔をワークの大きさに合わせて自由に調節できる把持間隔調整装置を目的とする。
このため、この装置は、図1に示すように、把持間隔調整装置本体51をロボットハンド本体に装着し、エアシリンダ56によってON/OFF式の開閉動作を行うロボットハンドの把持間隔調整装置本体51のストッパ53がフィンガ54の開状態位置および閉状態位置を任意に規制するので、結果として把持間隔50を任意に調節するものである。なお、この図で57はピニオンである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平6−246671号公報、「ロボットハンド把持間隔調整装置」
【発明の概要】
【発明が解決しようとする課題】
【0007】
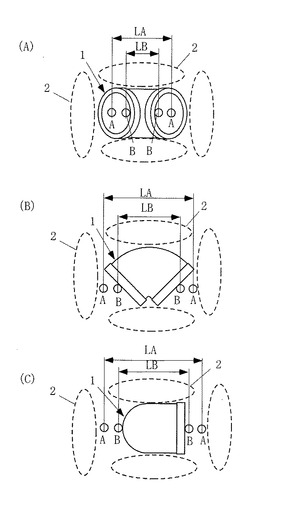
図2は、バラ積みされた管継手(この図ではエルボ)に対する把持爪の挿入位置と閉位置を示す図である。
この図において、(A)(B)(C)は、ロボットハンドをワーク1に向けて移動する際の、ロボットハンド側から見たワークの異なる姿勢を示している。また、各図において、破線の楕円2は、干渉域であり、特定のワーク1(把持対象のワーク)のまわりに位置する別のワーク等である。さらに、図中のAは把持爪の挿入位置、Bは把持爪の把持位置であり、LAは挿入位置における把持爪の間隔、LBは把持位置における把持爪の間隔である。
【0008】
この図のようにワークの形状により、バラ積みされた特定のワークを把持する場合、ワークとワークの隙間に把持爪を挿入することができ、かつ、種々の姿勢でワークを把持する必要がある。
これを実現させるためには、(1)長ストローク、(2)高把持力、(3)把持爪を任意の位置で位置決め可能であることが必要となる。
【0009】
空圧アクチュエータを用いた従来のロボットハンドは、長ストロークが困難であり、かつ把持爪を任意の位置で位置決めできない問題点がある。
また、電動アクチュエータを用いた従来のロボットハンドは、把持姿勢によってはストロークが不足したり、或いは、ストローク長いものでは把持力が不足したりする。そのため、サイズが大きく把持力の高い電動アクチュエータを用いるため、ロボットハンドのサイズが大きくなり、コストアップや設置位置の制限、ティーチングの煩雑化等につながっていた。
【0010】
本発明は上述した問題点を解決するために創案されたものである。すなわち本発明の目的は、ワークの姿勢により把持爪の挿入位置と把持位置が大きく変動する場合でも、必要とする長ストロークの開閉が可能であり、かつ挿入位置を任意に設定することができ、かつ挿入位置及び把持位置にかかわらず大きな把持力を有し、かつ小型軽量化が可能である長ストロークロボットハンドを提供することにある。
【課題を解決するための手段】
【0011】
本発明によれば、搬送ロボットのハンド取付部に取り付けられたハンド本体と、
該ハンド本体に上端部が水平方向に開閉可能に取り付けられ、下方に延びる1対の把持爪と、
該各把持爪を所望の最大力で水平方向に移動可能な1対の流体圧アクチュエータと、
該各流体圧アクチュエータを所望の最大ストロークで水平方向に移動可能な1対の電動アクチュエータと、
該各流体圧アクチュエータを前記最大ストローク内の任意の位置で固定する位置決め装置と、を備えたことを特徴とする長ストロークロボットハンドが提供される。
【0012】
本発明の実施形態によれば、前記位置決め装置は、各流体圧アクチュエータと共に水平移動し、任意の位置で流体圧アクチュエータに作用する反力に抗してその位置を保持するラッチ機構と、
該ラッチ機構を解除可能なラッチ切替装置とからなる。
【0013】
また本発明の別の実施形態によれば、前記位置決め装置は、前記電動アクチュエータに設けられたブレーキである。
【発明の効果】
【0014】
上記本発明の構成によれば、1対の把持爪を所望の最大力で移動可能な1対の流体圧アクチュエータと、該各流体圧アクチュエータを最大ストローク内の任意の位置で固定する位置決め装置とを備えるので、1対の把持爪の挿入位置及び把持位置にかかわらず大きな把持力を有する。
【0015】
また、各流体圧アクチュエータを所望の最大ストロークで移動可能な1対の電動アクチュエータを備えるので、ワークの姿勢により把持爪の挿入位置と把持位置が大きく変動する場合でも、必要とする長ストロークの開閉が可能であり、かつ挿入位置を任意に設定することができる。
【0016】
従って、把持爪の挿入位置の位置決めは、ストロークの長い電動アクチュエータで実施し、把持力は出力の大きい流体圧アクチュエータの圧力(空圧、水圧、油圧等)を用いて発揮することができる。
【0017】
これによって、長ストローク、高把持力、把持爪を任意の位置で停止できるコンパクトなロボットハンドが実現できる。またロボットハンドがコンパクトにできるため、ロボットサイズを抑えることができ、かつロボットハンドの可動範囲を広くとれてティーチングも容易になる。
【図面の簡単な説明】
【0018】
【図1】特許文献1の把持間隔調整装置の模式図である。
【図2】バラ積みされた管継手(エルボ)に対する把持爪の挿入位置と閉位置を示す図である。
【図3】本発明による長ストロークロボットハンドの実施形態図である。
【図4】図3(B)の右半分の拡大図である。
【図5】図4の長ストロークロボットハンドの作動説明図である。
【発明を実施するための形態】
【0019】
以下、本発明を実施するための最良の実施形態を図面に基づいて説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0020】
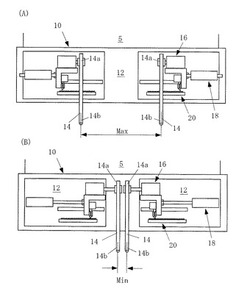
図3は、本発明による長ストロークロボットハンドの実施形態図である。この図において、(A)は把持爪の間隔が最大の状態、(B)は把持爪の間隔が最小の状態を示している。以下、本発明の長ストロークロボットハンドを単に「ロボットハンド」と呼ぶ。
【0021】
図3(A)(B)に示すように、本発明の長ストロークロボットハンド10(ロボットハンド)は、ハンド本体12と1対の把持爪14を有する。
【0022】
ハンド本体12は、図示しない搬送ロボットのハンド取付部5に取り付けられ、所定のワーキングエリア内で6自由度の位置及び姿勢を制御できるようになっている。
以下、説明の都合上、1対の把持爪14が鉛直下向きの姿勢の場合について説明する。なお、本発明はこれに限定されず、1対の把持爪14を水平、或いはその他の姿勢で使用する場合にも適用することができる。
【0023】
図3(A)(B)において、1対の把持爪14は、ハンド本体12に上端部14aが水平方向に開閉可能に取り付けられ下方に延びる。把持爪14は、図3(A)の最大間隔から図3(B)の最小間隔まで、各々任意の位置で位置決めされる。これより、把持爪14はハンド本体12の中心位置を含めた任意の位置において下端部14bで図示しないワークを把持し搬送するようになっている。すなわち、本発明では、必ずしもハンド本体12の中心位置でワークを把持する必要はない。
【0024】
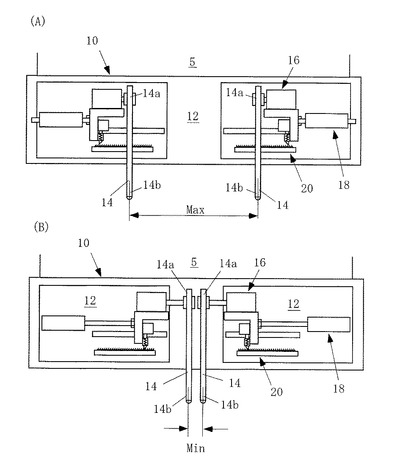
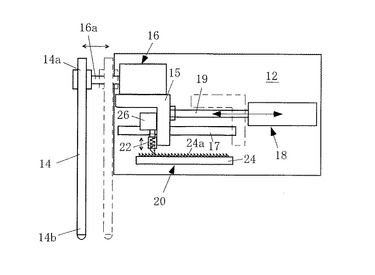
図4は、図3(B)の右半分の拡大図である。
この図において、本発明のロボットハンド10は、さらに、流体圧アクチュエータ16、電動アクチュエータ18、及び位置決め装置20を備える。流体圧アクチュエータ16、電動アクチュエータ18、及び位置決め装置20は、この例で、左右に1対ずつ設けている。
【0025】
流体圧アクチュエータ16は、例えば流体圧シリンダであり、そのシリンダロッド16aの先端に把持爪14の上端部14aが固定され、各把持爪14を所望の最大力で水平方向に移動可能になっている。
また、各把持爪14は図で水平方向に平行移動するように、図示しないガイドで案内されている。このガイドには、例えば、リニアガイド、平行ロッド等を用いることができる。
流体圧アクチュエータ16の作動流体は、油圧、水圧、空圧のいずれであってもよい。この作動流体は、図示しない配管(例えば空圧チューブ)を介して、図示しない流体ユニットから、流体圧アクチュエータ16に供給され、そのシリンダロッド16aを前後進させ、把持爪14を開閉する。
流体圧アクチュエータ16の前後進のストロークは、後述するラッチ機構のラッチピッチPより大きければよく、最大ストローク(図3における最大間隔から最小間隔までの半分)に比較して、例えば1/10以下であってもよい。
【0026】
電動アクチュエータ18は、各流体圧アクチュエータ16を所望の最大ストロークで水平方向に移動可能になっている。
この例において、流体圧アクチュエータ16は、移動台15の上面に固定され、移動台15はリニアガイド17により、同一の姿勢で水平方向に移動可能に構成されている。
また、電動アクチュエータ18は、例えばリニアモータであり、移動台15に左端が固定された移動ロッド19を所望の最大ストロークで水平方向に移動できるようになっている。また、図示しない位置センサにより、移動台15の移動位置を検出し、所望の位置で停止できるようになっている。
電動アクチュエータ18は、所望の最大ストロークを移動できる限りで、その出力は、後述するラッチ機構の作動抵抗より大きければよい。
なお、電動アクチュエータ18は、リニアモータに限定されず、ラックとピニオン、ボールねじとボールナット、スクリュウーねじなどとサーボモータとの組合せであってもよい。
【0027】
位置決め装置20は、この例では、ラッチ機構22,24とラッチ切替装置26とからなる。
ラッチ機構22,24は、バネで下方に付勢されたラッチ金具22と、該ラッチ金具22と係合するラッチ歯24aを有する反力受け部材24とからなる。ラッチ金具22は、電動アクチュエータ18により移動台15を図で左方に移動させると、各流体圧アクチュエータ16と共に水平移動し、任意の位置でラッチ歯24aと係合し、流体圧アクチュエータ16に作用する(図で右向きの)反力に抗してその位置を保持するようになっている。
このラッチ機構22,24の保持力は、流体圧アクチュエータ16の最大力より大きく設定されている。
【0028】
ラッチ切替装置26は、例えば、ソレノイド、空圧シリンダ、電動シリンダであり、ラッチ金具22を図で上下動させて、上昇位置でラッチ機構22,24の係合を解除できるようになっている。
【0029】
なお、位置決め装置20は、この例に限定されず、各流体圧アクチュエータ16を最大ストローク内の任意の位置で固定できるかぎりで、その他の構成であってもよい。
例えば、電動アクチュエータ18に流体圧アクチュエータ16の最大力を保持できるブレーキを設置してもよい。
【0030】
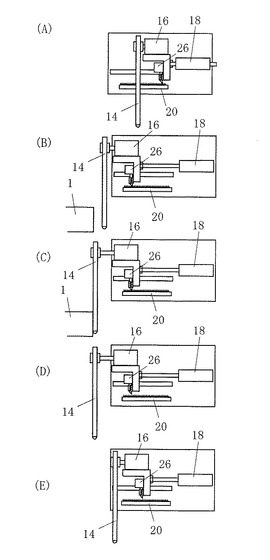
図5は、図4の長ストロークロボットハンドの作動説明図である。この図において、(A)は初期状態、(B)は把持爪の位置決め、(C)はワーク把持、(D)はラッチ解除、(E)はワーク把持解除の各状態を示している。
【0031】
初期状態(A)では、流体圧アクチュエータ16と電動アクチュエータ18の両方を図で右方向に後退させ、把持爪12の間隔を最大に位置決めする。この状態において、ラッチ切替装置26によりラッチ機構22,24を作動させ、把持爪14が前後に移動(開閉)しないように保持する。
この初期状態(A)において、図示しない搬送ロボットのハンド取付部5を3次元的に移動し、対象とするワークに対し、1対の把持爪14が所定の向き(この例では鉛直下向き)になるように、ロボットハンド10の位置及び姿勢を制御する。
【0032】
把持爪の位置決め(B)では、電動アクチュエータ18により把持爪12が所定の挿入位置に達するまで、図で左方に移動する。この状態において、ラッチ金具22は反力受け部材24のラッチ歯24aと係合したまま、ラッチ金具22がバネに抗して上下動しながら、把持爪14が後戻りしないように保持する。
【0033】
把持爪12が所定の挿入位置に達した後、図示しない搬送ロボットのハンド取付部5を3次元的に移動し、対象とするワークに対し、1対の把持爪14が所定の挿入位置で、ワークに対し挿入されるように、ロボットハンド10の位置及び姿勢を制御する。
【0034】
ワーク把持(C)において、所定の挿入位置で1対の把持爪14を挿入した後、流体圧アクチュエータ16を図で左方に作動させ、把持爪14でワーク1を把持する。
この状態で、図示しない搬送ロボットのハンド取付部5を3次元的に移動し、対象とするワークを所定の搬送先まで搬送し、所望の姿勢に位置決めすることができる。
【0035】
ラッチ解除(D)では、所定の搬送先において、ラッチ機構22,24を解除して、電動アクチュエータ18を図で右方に作動させる。なお、ラッチ解除の代わりに、流体圧アクチュエータ16を図で右方に作動させてもよい。
この状態で、把持爪14が開いてワークを離し、ワークの搬送が完了する。
【0036】
ワーク把持解除(E)では、ラッチ機構22,24を解除して、電動アクチュエータ18を図で右方に作動させ、かつ流体圧アクチュエータ16も図で右方に作動させて、初期状態(A)に戻る。
【0037】
上述した本発明の構成によれば、1対の把持爪14を所望の最大力で移動可能な1対の流体圧アクチュエータ16と、各流体圧アクチュエータを最大ストローク内の任意の位置で固定する位置決め装置20とを備えるので、1対の把持爪14の挿入位置及び把持位置にかかわらず大きな把持力を有する。
【0038】
また、各流体圧アクチュエータ16を所望の最大ストロークで移動可能な1対の電動アクチュエータ18を備えるので、ワークの姿勢により把持爪14の挿入位置と把持位置が大きく変動する場合でも、必要とする長ストロークの開閉が可能であり、かつ挿入位置を任意に設定することができる。
【0039】
従って、把持爪14の挿入位置の位置決めは、ストロークの長い電動アクチュエータ18で実施し、把持力は出力の大きい流体圧アクチュエータ16の圧力(空圧、水圧、油圧等)を用いて発揮することができる。
【0040】
これによって、長ストローク、高把持力、把持爪を任意の位置で停止できるコンパクトなロボットハンドが実現できる。またロボットハンドがコンパクトにできるため、ロボットサイズを抑えることができ、かつロボットハンドの可動範囲を広くとれてティーチングも容易になる。
【0041】
なお、本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更を加え得ることは勿論である。
【符号の説明】
【0042】
1 ワーク、5 ハンド取付部、
10 長ストロークロボットハンド(ロボットハンド)
12 ハンド本体、14 把持爪、14a 上端部、
15 移動台、16 流体圧アクチュエータ、
16a シリンダロッド、17 リニアガイド、
18 電動アクチュエータ(リニアモータ)、
19 移動ロッド、20 位置決め装置、
22,24 ラッチ機構、22 ラッチ金具、
24 反力受け部材、24a ラッチ歯、
26 ラッチ切替装置
【技術分野】
【0001】
本発明は、長ストロークの開閉ができ、挿入位置及び把持位置にかかわらず大きな把持力を有する長ストロークロボットハンドに関する。
【背景技術】
【0002】
バラ積みされたワーク(例えば、管継手、ボルト、ナット、等)を把持してハンドリングする場合に、真空吸着を利用した真空吸着パッド、電磁石、ワークを機械的に把持するロボットハンド、等が従来から用いられている。
このうち、真空吸着パッドと電磁石は、把持したワークの姿勢がランダムであるため、次工程にそのまま適用できない問題がある。
そこでこのような場合、ワークを機械的に把持するロボットハンドが用いられる。
【0003】
視覚センサによる物体認識技術の進歩に伴い、バラ積みされたワークであっても、ロボットハンドの姿勢をワークに対応させて変化させ、ロボットハンドに設けられた把持爪をワーク間の隙間に挿入して、特定のワークを把持しハンドリングすることができる。
【0004】
しかし、この場合、把持爪の間隔をワークの大きさに合わせて調節する必要がある。そこで、この問題を解決するために、例えば特許文献1が既に提案されている。
【0005】
特許文献1は、エアシリンダ等によってON/OFF式の迅速な水平開閉の把持動作を行う市販のロボットハンドを利用して、ロボットハンドの把持間隔をワークの大きさに合わせて自由に調節できる把持間隔調整装置を目的とする。
このため、この装置は、図1に示すように、把持間隔調整装置本体51をロボットハンド本体に装着し、エアシリンダ56によってON/OFF式の開閉動作を行うロボットハンドの把持間隔調整装置本体51のストッパ53がフィンガ54の開状態位置および閉状態位置を任意に規制するので、結果として把持間隔50を任意に調節するものである。なお、この図で57はピニオンである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平6−246671号公報、「ロボットハンド把持間隔調整装置」
【発明の概要】
【発明が解決しようとする課題】
【0007】
図2は、バラ積みされた管継手(この図ではエルボ)に対する把持爪の挿入位置と閉位置を示す図である。
この図において、(A)(B)(C)は、ロボットハンドをワーク1に向けて移動する際の、ロボットハンド側から見たワークの異なる姿勢を示している。また、各図において、破線の楕円2は、干渉域であり、特定のワーク1(把持対象のワーク)のまわりに位置する別のワーク等である。さらに、図中のAは把持爪の挿入位置、Bは把持爪の把持位置であり、LAは挿入位置における把持爪の間隔、LBは把持位置における把持爪の間隔である。
【0008】
この図のようにワークの形状により、バラ積みされた特定のワークを把持する場合、ワークとワークの隙間に把持爪を挿入することができ、かつ、種々の姿勢でワークを把持する必要がある。
これを実現させるためには、(1)長ストローク、(2)高把持力、(3)把持爪を任意の位置で位置決め可能であることが必要となる。
【0009】
空圧アクチュエータを用いた従来のロボットハンドは、長ストロークが困難であり、かつ把持爪を任意の位置で位置決めできない問題点がある。
また、電動アクチュエータを用いた従来のロボットハンドは、把持姿勢によってはストロークが不足したり、或いは、ストローク長いものでは把持力が不足したりする。そのため、サイズが大きく把持力の高い電動アクチュエータを用いるため、ロボットハンドのサイズが大きくなり、コストアップや設置位置の制限、ティーチングの煩雑化等につながっていた。
【0010】
本発明は上述した問題点を解決するために創案されたものである。すなわち本発明の目的は、ワークの姿勢により把持爪の挿入位置と把持位置が大きく変動する場合でも、必要とする長ストロークの開閉が可能であり、かつ挿入位置を任意に設定することができ、かつ挿入位置及び把持位置にかかわらず大きな把持力を有し、かつ小型軽量化が可能である長ストロークロボットハンドを提供することにある。
【課題を解決するための手段】
【0011】
本発明によれば、搬送ロボットのハンド取付部に取り付けられたハンド本体と、
該ハンド本体に上端部が水平方向に開閉可能に取り付けられ、下方に延びる1対の把持爪と、
該各把持爪を所望の最大力で水平方向に移動可能な1対の流体圧アクチュエータと、
該各流体圧アクチュエータを所望の最大ストロークで水平方向に移動可能な1対の電動アクチュエータと、
該各流体圧アクチュエータを前記最大ストローク内の任意の位置で固定する位置決め装置と、を備えたことを特徴とする長ストロークロボットハンドが提供される。
【0012】
本発明の実施形態によれば、前記位置決め装置は、各流体圧アクチュエータと共に水平移動し、任意の位置で流体圧アクチュエータに作用する反力に抗してその位置を保持するラッチ機構と、
該ラッチ機構を解除可能なラッチ切替装置とからなる。
【0013】
また本発明の別の実施形態によれば、前記位置決め装置は、前記電動アクチュエータに設けられたブレーキである。
【発明の効果】
【0014】
上記本発明の構成によれば、1対の把持爪を所望の最大力で移動可能な1対の流体圧アクチュエータと、該各流体圧アクチュエータを最大ストローク内の任意の位置で固定する位置決め装置とを備えるので、1対の把持爪の挿入位置及び把持位置にかかわらず大きな把持力を有する。
【0015】
また、各流体圧アクチュエータを所望の最大ストロークで移動可能な1対の電動アクチュエータを備えるので、ワークの姿勢により把持爪の挿入位置と把持位置が大きく変動する場合でも、必要とする長ストロークの開閉が可能であり、かつ挿入位置を任意に設定することができる。
【0016】
従って、把持爪の挿入位置の位置決めは、ストロークの長い電動アクチュエータで実施し、把持力は出力の大きい流体圧アクチュエータの圧力(空圧、水圧、油圧等)を用いて発揮することができる。
【0017】
これによって、長ストローク、高把持力、把持爪を任意の位置で停止できるコンパクトなロボットハンドが実現できる。またロボットハンドがコンパクトにできるため、ロボットサイズを抑えることができ、かつロボットハンドの可動範囲を広くとれてティーチングも容易になる。
【図面の簡単な説明】
【0018】
【図1】特許文献1の把持間隔調整装置の模式図である。
【図2】バラ積みされた管継手(エルボ)に対する把持爪の挿入位置と閉位置を示す図である。
【図3】本発明による長ストロークロボットハンドの実施形態図である。
【図4】図3(B)の右半分の拡大図である。
【図5】図4の長ストロークロボットハンドの作動説明図である。
【発明を実施するための形態】
【0019】
以下、本発明を実施するための最良の実施形態を図面に基づいて説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0020】
図3は、本発明による長ストロークロボットハンドの実施形態図である。この図において、(A)は把持爪の間隔が最大の状態、(B)は把持爪の間隔が最小の状態を示している。以下、本発明の長ストロークロボットハンドを単に「ロボットハンド」と呼ぶ。
【0021】
図3(A)(B)に示すように、本発明の長ストロークロボットハンド10(ロボットハンド)は、ハンド本体12と1対の把持爪14を有する。
【0022】
ハンド本体12は、図示しない搬送ロボットのハンド取付部5に取り付けられ、所定のワーキングエリア内で6自由度の位置及び姿勢を制御できるようになっている。
以下、説明の都合上、1対の把持爪14が鉛直下向きの姿勢の場合について説明する。なお、本発明はこれに限定されず、1対の把持爪14を水平、或いはその他の姿勢で使用する場合にも適用することができる。
【0023】
図3(A)(B)において、1対の把持爪14は、ハンド本体12に上端部14aが水平方向に開閉可能に取り付けられ下方に延びる。把持爪14は、図3(A)の最大間隔から図3(B)の最小間隔まで、各々任意の位置で位置決めされる。これより、把持爪14はハンド本体12の中心位置を含めた任意の位置において下端部14bで図示しないワークを把持し搬送するようになっている。すなわち、本発明では、必ずしもハンド本体12の中心位置でワークを把持する必要はない。
【0024】
図4は、図3(B)の右半分の拡大図である。
この図において、本発明のロボットハンド10は、さらに、流体圧アクチュエータ16、電動アクチュエータ18、及び位置決め装置20を備える。流体圧アクチュエータ16、電動アクチュエータ18、及び位置決め装置20は、この例で、左右に1対ずつ設けている。
【0025】
流体圧アクチュエータ16は、例えば流体圧シリンダであり、そのシリンダロッド16aの先端に把持爪14の上端部14aが固定され、各把持爪14を所望の最大力で水平方向に移動可能になっている。
また、各把持爪14は図で水平方向に平行移動するように、図示しないガイドで案内されている。このガイドには、例えば、リニアガイド、平行ロッド等を用いることができる。
流体圧アクチュエータ16の作動流体は、油圧、水圧、空圧のいずれであってもよい。この作動流体は、図示しない配管(例えば空圧チューブ)を介して、図示しない流体ユニットから、流体圧アクチュエータ16に供給され、そのシリンダロッド16aを前後進させ、把持爪14を開閉する。
流体圧アクチュエータ16の前後進のストロークは、後述するラッチ機構のラッチピッチPより大きければよく、最大ストローク(図3における最大間隔から最小間隔までの半分)に比較して、例えば1/10以下であってもよい。
【0026】
電動アクチュエータ18は、各流体圧アクチュエータ16を所望の最大ストロークで水平方向に移動可能になっている。
この例において、流体圧アクチュエータ16は、移動台15の上面に固定され、移動台15はリニアガイド17により、同一の姿勢で水平方向に移動可能に構成されている。
また、電動アクチュエータ18は、例えばリニアモータであり、移動台15に左端が固定された移動ロッド19を所望の最大ストロークで水平方向に移動できるようになっている。また、図示しない位置センサにより、移動台15の移動位置を検出し、所望の位置で停止できるようになっている。
電動アクチュエータ18は、所望の最大ストロークを移動できる限りで、その出力は、後述するラッチ機構の作動抵抗より大きければよい。
なお、電動アクチュエータ18は、リニアモータに限定されず、ラックとピニオン、ボールねじとボールナット、スクリュウーねじなどとサーボモータとの組合せであってもよい。
【0027】
位置決め装置20は、この例では、ラッチ機構22,24とラッチ切替装置26とからなる。
ラッチ機構22,24は、バネで下方に付勢されたラッチ金具22と、該ラッチ金具22と係合するラッチ歯24aを有する反力受け部材24とからなる。ラッチ金具22は、電動アクチュエータ18により移動台15を図で左方に移動させると、各流体圧アクチュエータ16と共に水平移動し、任意の位置でラッチ歯24aと係合し、流体圧アクチュエータ16に作用する(図で右向きの)反力に抗してその位置を保持するようになっている。
このラッチ機構22,24の保持力は、流体圧アクチュエータ16の最大力より大きく設定されている。
【0028】
ラッチ切替装置26は、例えば、ソレノイド、空圧シリンダ、電動シリンダであり、ラッチ金具22を図で上下動させて、上昇位置でラッチ機構22,24の係合を解除できるようになっている。
【0029】
なお、位置決め装置20は、この例に限定されず、各流体圧アクチュエータ16を最大ストローク内の任意の位置で固定できるかぎりで、その他の構成であってもよい。
例えば、電動アクチュエータ18に流体圧アクチュエータ16の最大力を保持できるブレーキを設置してもよい。
【0030】
図5は、図4の長ストロークロボットハンドの作動説明図である。この図において、(A)は初期状態、(B)は把持爪の位置決め、(C)はワーク把持、(D)はラッチ解除、(E)はワーク把持解除の各状態を示している。
【0031】
初期状態(A)では、流体圧アクチュエータ16と電動アクチュエータ18の両方を図で右方向に後退させ、把持爪12の間隔を最大に位置決めする。この状態において、ラッチ切替装置26によりラッチ機構22,24を作動させ、把持爪14が前後に移動(開閉)しないように保持する。
この初期状態(A)において、図示しない搬送ロボットのハンド取付部5を3次元的に移動し、対象とするワークに対し、1対の把持爪14が所定の向き(この例では鉛直下向き)になるように、ロボットハンド10の位置及び姿勢を制御する。
【0032】
把持爪の位置決め(B)では、電動アクチュエータ18により把持爪12が所定の挿入位置に達するまで、図で左方に移動する。この状態において、ラッチ金具22は反力受け部材24のラッチ歯24aと係合したまま、ラッチ金具22がバネに抗して上下動しながら、把持爪14が後戻りしないように保持する。
【0033】
把持爪12が所定の挿入位置に達した後、図示しない搬送ロボットのハンド取付部5を3次元的に移動し、対象とするワークに対し、1対の把持爪14が所定の挿入位置で、ワークに対し挿入されるように、ロボットハンド10の位置及び姿勢を制御する。
【0034】
ワーク把持(C)において、所定の挿入位置で1対の把持爪14を挿入した後、流体圧アクチュエータ16を図で左方に作動させ、把持爪14でワーク1を把持する。
この状態で、図示しない搬送ロボットのハンド取付部5を3次元的に移動し、対象とするワークを所定の搬送先まで搬送し、所望の姿勢に位置決めすることができる。
【0035】
ラッチ解除(D)では、所定の搬送先において、ラッチ機構22,24を解除して、電動アクチュエータ18を図で右方に作動させる。なお、ラッチ解除の代わりに、流体圧アクチュエータ16を図で右方に作動させてもよい。
この状態で、把持爪14が開いてワークを離し、ワークの搬送が完了する。
【0036】
ワーク把持解除(E)では、ラッチ機構22,24を解除して、電動アクチュエータ18を図で右方に作動させ、かつ流体圧アクチュエータ16も図で右方に作動させて、初期状態(A)に戻る。
【0037】
上述した本発明の構成によれば、1対の把持爪14を所望の最大力で移動可能な1対の流体圧アクチュエータ16と、各流体圧アクチュエータを最大ストローク内の任意の位置で固定する位置決め装置20とを備えるので、1対の把持爪14の挿入位置及び把持位置にかかわらず大きな把持力を有する。
【0038】
また、各流体圧アクチュエータ16を所望の最大ストロークで移動可能な1対の電動アクチュエータ18を備えるので、ワークの姿勢により把持爪14の挿入位置と把持位置が大きく変動する場合でも、必要とする長ストロークの開閉が可能であり、かつ挿入位置を任意に設定することができる。
【0039】
従って、把持爪14の挿入位置の位置決めは、ストロークの長い電動アクチュエータ18で実施し、把持力は出力の大きい流体圧アクチュエータ16の圧力(空圧、水圧、油圧等)を用いて発揮することができる。
【0040】
これによって、長ストローク、高把持力、把持爪を任意の位置で停止できるコンパクトなロボットハンドが実現できる。またロボットハンドがコンパクトにできるため、ロボットサイズを抑えることができ、かつロボットハンドの可動範囲を広くとれてティーチングも容易になる。
【0041】
なお、本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々変更を加え得ることは勿論である。
【符号の説明】
【0042】
1 ワーク、5 ハンド取付部、
10 長ストロークロボットハンド(ロボットハンド)
12 ハンド本体、14 把持爪、14a 上端部、
15 移動台、16 流体圧アクチュエータ、
16a シリンダロッド、17 リニアガイド、
18 電動アクチュエータ(リニアモータ)、
19 移動ロッド、20 位置決め装置、
22,24 ラッチ機構、22 ラッチ金具、
24 反力受け部材、24a ラッチ歯、
26 ラッチ切替装置
【特許請求の範囲】
【請求項1】
搬送ロボットのハンド取付部に取り付けられたハンド本体と、
該ハンド本体に上端部が水平方向に開閉可能に取り付けられ、下方に延びる1対の把持爪と、
該各把持爪を所望の最大力で水平方向に移動可能な1対の流体圧アクチュエータと、
該各流体圧アクチュエータを所望の最大ストロークで水平方向に移動可能な1対の電動アクチュエータと、
該各流体圧アクチュエータを前記最大ストローク内の任意の位置で固定する位置決め装置と、を備えたことを特徴とする長ストロークロボットハンド。
【請求項2】
前記位置決め装置は、各流体圧アクチュエータと共に水平移動し、任意の位置で流体圧アクチュエータに作用する反力に抗してその位置を保持するラッチ機構と、
該ラッチ機構を解除可能なラッチ切替装置とからなる、ことを特徴とする請求項1に記載の長ストロークロボットハンド。
【請求項3】
前記位置決め装置は、前記電動アクチュエータに設けられたブレーキである、ことを特徴とする請求項1に記載の長ストロークロボットハンド。
【請求項1】
搬送ロボットのハンド取付部に取り付けられたハンド本体と、
該ハンド本体に上端部が水平方向に開閉可能に取り付けられ、下方に延びる1対の把持爪と、
該各把持爪を所望の最大力で水平方向に移動可能な1対の流体圧アクチュエータと、
該各流体圧アクチュエータを所望の最大ストロークで水平方向に移動可能な1対の電動アクチュエータと、
該各流体圧アクチュエータを前記最大ストローク内の任意の位置で固定する位置決め装置と、を備えたことを特徴とする長ストロークロボットハンド。
【請求項2】
前記位置決め装置は、各流体圧アクチュエータと共に水平移動し、任意の位置で流体圧アクチュエータに作用する反力に抗してその位置を保持するラッチ機構と、
該ラッチ機構を解除可能なラッチ切替装置とからなる、ことを特徴とする請求項1に記載の長ストロークロボットハンド。
【請求項3】
前記位置決め装置は、前記電動アクチュエータに設けられたブレーキである、ことを特徴とする請求項1に記載の長ストロークロボットハンド。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−247288(P2010−247288A)
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願番号】特願2009−100431(P2009−100431)
【出願日】平成21年4月17日(2009.4.17)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願日】平成21年4月17日(2009.4.17)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]